
台車搬送作業計測システム
【課題】台車搬送作業計測システムにおいて、簡単な構成により、台車の移動位置と移動速度を安価かつ容易に計測可能とする。
【解決手段】本システム1は、搬送作業領域に設置された位置タグ2と、位置タグ2の位置情報を読み取る台車10に設置されたタグ読取部3と、車輪11に設置されタグ読取部3によってその存在が検知される車輪タグ4と、台車10に固定され車輪タグ4の周回軌道を遮蔽して車輪タグ4がタグ読取部3によって連続的に検知されるのを防止する遮蔽部5と、タグ読取部3が出力する位置タグ2からの位置情報および車輪タグ4の検知情報を台車10の動作情報として台車10の外部に送信する送信部6と、送信部6から送信された情報を受信する受信部7と、受信した検知情報の出現頻度に基づいて台車10の移動速度を算出する演算部8と、算出結果を含む動作情報を記録する記録部9を備えている。タグ読取部3が両タグ2,4に併用される。
【解決手段】本システム1は、搬送作業領域に設置された位置タグ2と、位置タグ2の位置情報を読み取る台車10に設置されたタグ読取部3と、車輪11に設置されタグ読取部3によってその存在が検知される車輪タグ4と、台車10に固定され車輪タグ4の周回軌道を遮蔽して車輪タグ4がタグ読取部3によって連続的に検知されるのを防止する遮蔽部5と、タグ読取部3が出力する位置タグ2からの位置情報および車輪タグ4の検知情報を台車10の動作情報として台車10の外部に送信する送信部6と、送信部6から送信された情報を受信する受信部7と、受信した検知情報の出現頻度に基づいて台車10の移動速度を算出する演算部8と、算出結果を含む動作情報を記録する記録部9を備えている。タグ読取部3が両タグ2,4に併用される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送用台車の移動と動作の情報を取得する搬送作業計測システムに関する。
【背景技術】
【0002】
従来から、生産現場における人が操作する台車の搬送作業効率を向上するため、一連の搬送作業の各所要時間を台車の動作について計測する搬送作業計測が行われている。例えば、建物内に位置情報を持つICタグを設置し、搬送用台車にICタグ読取装置と送信機を搭載し、搬送作業中に時間情報と読取装置によって読み取ったICタグの位置情報とを送信機によって上位のコンピュータに送信し、作業時間や作業内容などの分析が行われる。この場合、細かく位置情報を得たい場合にはICタグの設置を増やせばよく、また、測定内容や対象の変更をする場合にはICタグの位置を換えるだけで済むので、容易かつフレキシブルに搬送作業計測を実施できる。しかしながら、このような搬送作業計測においては、各ICタグ位置における位置情報と時間情報、すなわち点状の情報しか得られない。また、各点間を移動中の台車の動作情報を得るためにICタグを増やすとしても限界がある。
【0003】
そこで、搬送台車にエンコーダや加速度センサ等の計測機器を備えて、搬送台車の移動情報を逐一計測して上位コンピュータに送信することが考えられる。この場合、例えば、台車の移動時間と移動していない時間とを区別することができ、作業者が台車を離れて行っている作業時間を移動時間から分離し、搬送作業の内訳を精度良く把握できる。また、所定の走行経路を走行し、駆動輪の回転数から移動距離を求める無人の運搬台車において、走行経路中の所定位置に設けた走行距離補正点を検出することにより移動距離を補正するようにした運搬台車の走行制御方式が知られている(例えば、特許文献1参照)。
【特許文献1】特開昭63−255710号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したようなエンコーダや加速度センサ等の計測機器を備えた搬送作業計測においては、エンコーダや加速度センサ等の計測機器およびインターフェイス費用が高く、また運用面においても機器の搭載や配線取付などの操作が煩わしいという問題がある。また、上述した特許文献1に示されるような運搬台車の走行制御方式においては、高価な計測機器を備える必要がないとしても、上述の走行距離補正点が、位置情報を持つICタグに相当し、やはり、点状の情報しか得られないという問題がある。
【0005】
本発明は、上記課題を解消するものであって、簡単な構成により、台車の移動位置と移動速度を安価かつ容易に計測できる台車搬送作業計測システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を達成するために、請求項1の発明は、台車の搬送作業領域に複数設置された位置座標を有する位置タグと、この位置タグの位置情報を通信により読み取る台車に設置されたタグ読取部とを備えて台車の動作情報を取得する台車搬送作業計測システムにおいて、前記台車の車輪に設置され前記タグ読取部によってその存在が検知される車輪タグと、前記台車に固定され前記車輪タグの周回軌道を遮蔽して前記車輪タグが前記タグ読取部によって連続的に検知されるのを防止する遮蔽部と、前記台車に設置され前記タグ読取部が出力する前記位置タグからの位置情報および前記車輪タグを検知した旨の検知情報を前記台車の動作情報として該台車外部に送信する送信部と、前記台車の外部にあって前記送信部から送信された情報を受信する受信部と、前記受信部が受信した検知情報の出現頻度に基づいて前記台車の移動速度を算出する演算部と、前記演算部による算出結果を含む前記台車の動作情報を記録する記録部または前記動作情報を外部に送出する通信部と、を備えたものである。
【0007】
請求項2の発明は、請求項1に記載の台車搬送作業計測システムにおいて、前記タグ読取部は、前記台車に搭載される荷物に設置された荷物タグから少なくとも荷物の存在情報を取得して前記台車の動作情報として出力するものである。
【0008】
請求項3の発明は、請求項1または請求項2に記載の台車搬送作業計測システムにおいて、前記車輪タグを設置した車輪に設置された判定用車輪タグと、前記台車に固定され前記判定用車輪タグの周回軌道を遮蔽して前記判定用車輪タグが前記タグ読取部によって前記車輪タグとは異なる位相または異なる周期によって検知されるようにする判定用遮蔽部と、をさらに備え、前記判定用車輪タグが前記タグ読取部によって検知され、前記検知した旨の検知情報が前記送信部によって送信されると共に前記受信部によって受信され、前記演算部は、前記車輪タグおよび前記判定用車輪タグに関する検知情報の出現順序に基づいてこれらのタグが設置された車輪の回転方向を算出するものである。
【0009】
請求項4の発明は、請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システムにおいて、前記台車は左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記左右の車輪のそれぞれに対して設置され、前記演算部は、前記左右の車輪タグに関する各検知情報に基づいて算出した左右の車輪の回転速度の差分により前記台車の旋回速度を算出するものである。
【0010】
請求項5の発明は、請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システムにおいて、前記台車は前後左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記前後左右の車輪のそれぞれに対して設置され、前記演算部は、前記前後左右の車輪タグに関する各検知情報に基づいて前記台車の旋回速度および移動速度を算出するものである。
【0011】
請求項6の発明は、請求項1乃至請求項5のいずれか一項に記載の台車搬送作業計測システムにおいて、前記タグ読取部は前記各タグを電波によって読み取るかまたは検知するものであり、前記タグ読取部と前記車輪タグまたは判定用車輪タグの間におけるタグ読取用電波の経路を確保するための電波反射板を前記台車に備えたものである。
【発明の効果】
【0012】
請求項1の発明によれば、速度計測用機器やインターフェースおよび配線作業などを要さずに、搬送台車の各位置における移動速度を、安価かつ容易に、計測して記録することができる。
【0013】
請求項2の発明によれば、停止時における、各荷物の積み込み時間、または積み降ろし時間を安価かつ容易に、計測して記録することができる。
【0014】
請求項3の発明によれば、安価かつ容易に、車輪の回転方向、従って台車の進行方向を判定することができる。
【0015】
請求項4の発明によれば、安価かつ容易に、旋回速度と方向を判定することができる。
【0016】
請求項5の発明によれば、より多くの情報を用いるので、スリップや検出不良などの外乱に対しても安定的に、移動速度を計測することができる。
【0017】
請求項6の発明によれば、タグ読取部の電波を発信する部分が複数の車輪タグに対する指向角や距離を確保できない場合であっても、簡単な電波反射板によって電波の経路を確保するので、安価かつ容易に読取可能となる。
【発明を実施するための最良の形態】
【0018】
(第1の実施形態)
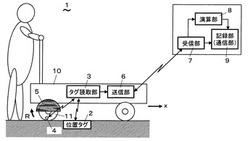
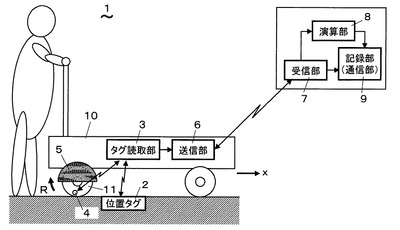
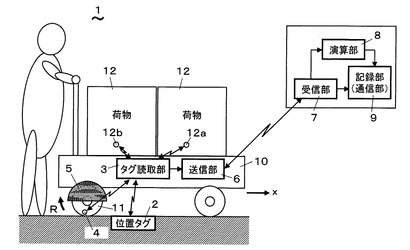
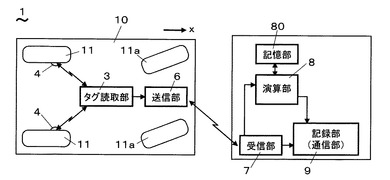
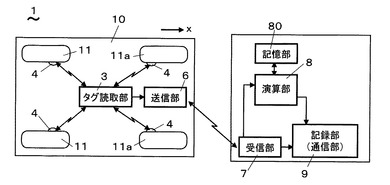
以下、本発明の実施形態に係る台車搬送作業計測システムについて、図面を参照して説明する。図1は第1の実施形態に係る台車搬送作業計測システムを示し、図2、図3はタグの検知信号を示す。台車搬送作業計測システム1は、図1に示すように、台車10の搬送作業領域に複数設置された位置座標を有する位置タグ2と、この位置タグ2の位置情報を通信により読み取る台車10に設置されたタグ読取部3とを備えて台車10の動作情報、すなわち、その移動と移動速度、停止、移動経路の要所々々における通過時刻や滞留時間などの情報を取得する計測システムである。台車10の動作情報は、台車10を用いる搬送作業の効率改善等に供される。
【0019】
台車搬送作業計測システム1は、台車10の車輪11に設置されタグ読取部3によってその存在が検知される車輪タグ4と、台車10に固定され車輪タグ4の周回軌道を遮蔽して車輪タグ4がタグ読取部3によって連続的に検知されるのを防止する遮蔽部5と、台車10に設置されタグ読取部3が出力する位置タグ2からの位置情報および車輪タグ4を検知した旨の検知情報を台車10の動作情報として台車10の外部に送信する送信部6と、台車10の外部にあって送信部6から送信された情報を受信する受信部7と、受信部7が受信した検知情報の出現頻度に基づいて台車10の移動速度を算出する演算部8と、演算部8による算出結果を含む台車10の動作情報を記録する記録部9を備えている。記録部9に代えて、または、記録部9に加えて、動作情報を外部に送出する通信部を備えることもできる。以下、各構成を詳細説明する。
【0020】
位置タグ2は、床面に添付または埋め込まれて配置されたRFID(電波による個体識別)タグである。一般にRFIDタグは、個体識別情報が埋め込まれ、電波などを用いた近距離(周波数帯によって数cm〜数m)の無線通信によって情報が読み取られる。従って、タグ読取部3は電波によって位置タグ2から情報を読み取る。位置タグ2から読み取られる情報は、その位置タグ2を配置した位置の座標値の情報である。なお、その情報は、座標値そのものではなく、その座標値を決定できる識別情報であってもよい。この場合、識別情報と座標値の対応表が援用される。
【0021】
車輪タグ4は、タグ読取部3から照射される電波に応答して電波を返すことによってタグ読取部3に検知される。車輪タグ4は、少なくともタグ読取部3によってその存在が検知さればよく、必ずしも識別情報などを読取可能に保持している必要はない。ただし、車輪タグ4と位置タグ2とは、識別可能とされている方が望ましい。車輪タグ4は、タグ読取部3によってその存在が検知されるように車輪11に固定されて車輪11と共に回転するように設けられる。ところが、遮蔽部5は、車輪11と共に回転する車輪タグ4の周回軌道の半分を、タグ読取部3から照射される電波に対して金属板や金属網などによって電磁遮蔽するように設けられている。従って、タグ読取部3は、遮蔽部5によって遮蔽されている周回軌道の半分の位置における車輪タグ4の存在を検知できない。
【0022】
タグ読取部3は、台車搬送作業計測システム1の動作中において、一定の制御周期のもとで、位置タグ2および車輪タグ4を検知すべく下方および車輪11に向けて電波を照射してタグからの電波を受信するタグ読取動作を行う。いずれかのタグを検知すると、その情報を送信部6を介して外部に送出する。受信部7、演算部8、および記録部9は、受信機能とCPUやメモリや外部記憶装置や表示装置や入力装置などの一般的な構成とを備えたコンピュータおよびその上のプロセスを用いて構成することができる。
【0023】
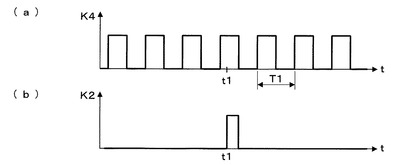
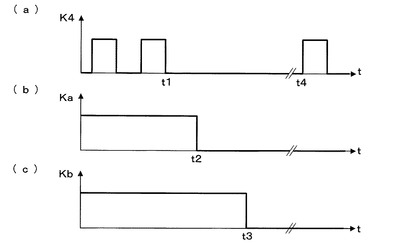
次に、台車搬送作業計測システム1による台車10の動作情報の取得の様子を説明する。台車10が、作業者によって押されて一定の速度で移動していると、図2(a)に示すように、タグ読取部3が車輪タグ4について取得する検知信号K4は、検知状態と非検知状態とを周期的に繰り返す信号となる。その繰り返しの周期T1は、上述から明らかなように車輪11の回転周期である。台車10がx方向に移動すると、車輪11はR方向に回転する。周期T1は、台車10の移動速度に1対1に対応するので、周期T1から車輪11の回転速度、従って、台車10の移動速度を求めることができる。ところで、図2(a)における検知信号K4は、直線によって示されているが、実際は測定点の集合である(このことは、他の検知信号においても同様である。)。そのような測定点のデータのうち、所定しきい値以上のデータが受信部7に送られ、演算部8によって処理されて、台車10の移動速度が、周期T1に応じて適宜算出される。算出された移動速度は、時間情報と共に記憶部に記録される。
【0024】
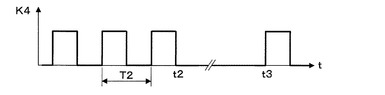
また、図2(b)に示すように、位置タグ2の検知信号K2が得られることにより、時刻t1に台車10が位置タグ2の上部を通過したことが分かる。タグ読取部3は、位置タグ2を検知している間に、位置タグ2から位置情報を読み取り、その情報を送信部6を介して送信する。受信部7は、タグ読取部3が位置タグ2を検知した時刻t1と共に時系列的に記録部9に記録させる。また、図3は、図2(a)に示した周期T1よりも大きな周期T2を有する検知信号K4の例であり、図2(a)の状態よりも遅い速度で移動していることを示す。また、時刻t2〜t3の間は検知信号がなく、台車10が停止していることを示す。なお、検知信号があっても、その信号が変化していない場合は、やはり台車10の停止状態を示す。これらの停止状態は、演算部8によってデータ処理された上で、速度ゼロと算出され、記録部9に記録される。
【0025】
上述のように、記録部9には、車輪タグ4によって得られた停止状態の情報を含む移動速度、および、位置タグ2によって得られた位置情報が、時間情報と共に時系列的に記録される。これらの計測により記録された情報は、後処理によって、またはリアルタイム処理によって、台車10の実際の移動経路の表示や、移動の所要時間解析などに供されて、搬送作業の効率向上に用いられる。
【0026】
また、上述したタグ読取部3が行うタグ読取動作の周期は、移動距離や移動速度を求める精度と、演算部8におけるデータの処理速度や、記録部9における記憶容量との兼ね合いで決められる。例えば、人が台車10を押して移動する場合の最高制限速度の状態において車輪11の1回転を検出できるように、測定間隔を設定することができる。この最高制限速度の場合、車輪11の半回転毎に、車輪タグ4の検知と非検知が繰り返され、車輪タグ4の検出情報は遮蔽部5の遮蔽により「有」「無」の2種類の情報となる。
【0027】
本実施形態の台車搬送作業計測システム1によれば、速度計測用機器やインターフェースおよび配線作業などを要さずに、搬送台車の各位置における移動速度を、安価かつ容易に、計測して記録することができる。すなわち、車輪タグ4は、タグ読取部3および遮蔽部5と共に、車輪の回転を検出する回転エンコーダを構成する。そして、車輪タグ4、および遮蔽部5は、車輪11および台車にに容易に設置できる。また、位置タグ2と、そのタグ読取部3とが既存の場合に、車輪タグ4用の読取部として、既存の位置タグ2用のタグ読取部3をそのまま併用することができる。
【0028】
(第2の実施形態)
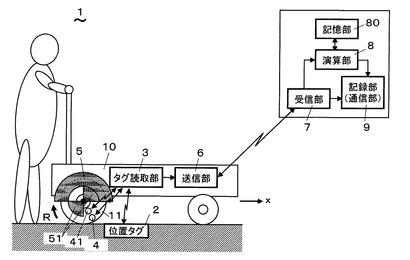
図4は第2の実施形態に係る台車搬送作業計測システムを示し、図5(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第1の実施形態における台車搬送作業計測システム1において、図4に示すように、さらに、荷物12の存在有無の情報を取得して台車10の動作情報として出力するようにしたものである。すなわち、本実施形態のタグ読取部3は、一定の制御周期のもとで、位置タグ2および車輪タグ4に加え、台車10に搭載される荷物12に設置された荷物タグ12a,12bなどを検知すべく下方、車輪11、および上方に向けて電波を照射して、これらのタグからの電波を受信するタグ読取動作を行う。いずれかのタグを検知すると、その情報を送信部6を介して外部に送出する。照射用の電波として、指向性の少ないアンテナを用いればよい。また、位置タグ2、車輪タグ4、荷物タグ12a,12bなどの各タグは、タグの基本機能として、互いに識別可能とされている。
【0029】
図5(a)に示すように、車輪タグ4の検知信号K4の時間変化から、時刻t1〜t4の間において台車10が停止していることが分かる。また、図5(b)に示すように、時刻t2以降に、荷物タグ12aの検知信号Kaがないので、荷物タグ12aを有する荷物12が台車10から降ろされたことが分かる。さらに、図5(c)に示すように、時刻t3以降に、荷物タグ12bの検知信号Kbがないので、荷物タグ12bを有する荷物12が台車10から降ろされたことが分かる。このような、台車10に搭載された荷物12の有無の情報が、タグ読取部3によって検知され、最終的に、台車10の動作情報として記録部9に記録される。本実施形態の台車搬送作業計測システム1によれば、停止時における、各荷物12の積み込み時間、または積み降ろし時間を安価かつ容易に、計測して記録することができる。
【0030】
(第3の実施形態)
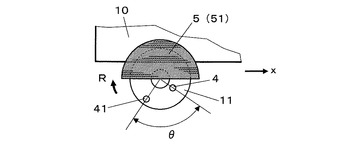
図6は第3の実施形態に係る台車搬送作業計測システムを示し、図7(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第1または第2の実施形態における台車搬送作業計測システム1において、図6に示すように、さらに、判定用車輪タグ41と、判定用遮蔽部51とを備えて車輪11の回転方向Rを検知するようにしたものである。すなわち、台車搬送作業計測システム1は、車輪タグ4を設置した車輪11に設置された判定用車輪タグ41と、台車10に固定され判定用車輪タグ41の周回軌道を遮蔽して判定用車輪タグ41がタグ読取部3によって車輪タグ4とは異なる周期によって検知されるようにする判定用遮蔽部51と、現在の検知情報と比較して回転方向の判定に用いる直前の検知情報を記憶するための記憶部80と、を備えている。
【0031】
判定用車輪タグ41はタグ読取部3によって検知され、その検知した旨の検知情報が送信部6によって送信されると共に受信部7によって受信される。演算部8は、車輪タグ4および判定用車輪タグ41に関する検知情報の出現順序に基づいてこれらのタグが設置された車輪11の回転方向Rを算出する。
【0032】
判定用車輪タグ41は、車輪タグ4を配置した半径上であって、より中心側に配置されている。また、判定用遮蔽部51は、判定用車輪タグ41の周回軌道を4分の1づつ交互に遮蔽するように設けられている。車輪タグ4が、遮蔽部5によって周回軌道の半分を遮蔽されているので、判定用車輪タグ41は車輪タグ4の半分の周期のもとで、タグ読取部3によって検知される。
【0033】
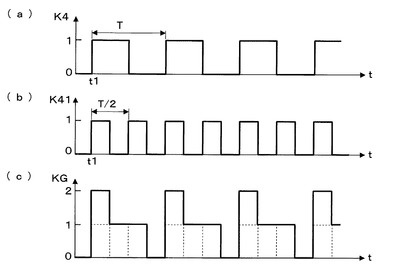
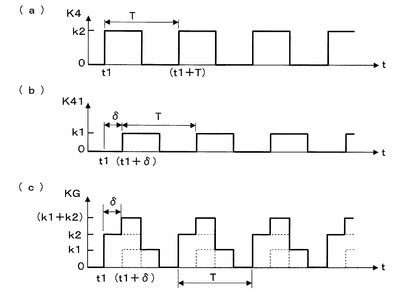
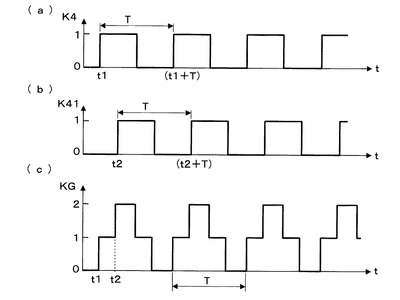
図7(a)に示すように、車輪タグ4の検知信号K4における検知周期がTであるのに対して、図7(b)に示すように、判定用車輪タグ41の検知信号K41における周期はT/2となっている。ここで、図7(c)に示すように、検知信号K4と検知信号K41を合計すると、時間軸tに対して非対称な波形の検知信号KGが得られる。波形が時間軸tに対して非対称とは、車輪11の回転方向が、検知信号KGの波形から判定できるということである。
【0034】
図7(c)に示す状況は、図6における台車10がx方向に移動し、車輪11がR方向に回転している状態を示す。検知信号KGは、時間tの経過とともに、値が(0→2)、または(2→1)、または(1→0)のように変化している。もし、この検知信号KGの値の時間変化が、(0→1)、または(1→2)、または(2→0)のように変化しているのであれば、台車10はx方向とは反対方向に移動し、R方向とは反対方向に回転していると結論することができる。回転方向を判定するために、演算部8は過去の検知情報と現在の検知情報とを比較する必要があり、記憶部80が直前の検知情報を記憶している。なお、記憶部80は、演算部8に内蔵することもできる。
【0035】
本実施形態の台車搬送作業計測システム1によれば、安価かつ容易に、車輪11の回転方向、従って台車10の進行方向を判定することができる。
【0036】
(第4の実施形態)
図8は第4の実施形態に係る台車搬送作業計測システムを示し、図9(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第3の実施形態における判定用遮蔽部51を遮蔽部5と共通にしたものである。すなわち、本実施形態における判定用車輪タグ41は、車輪11において、車輪タグ4が配置されている半径上とは異なる半径上に配置し、車輪タグ4の検知信号と判定用車輪タグ41の検知信号の時間変化の位相を異ならせることにより、車輪11の回転方向を判定する。両半径の成す角度θは、0゜<θ<180゜であればよいが、90゜が好適である。本実施形態では、θ=90゜とされている。
【0037】
また、図9(a)(b)に示すように、車輪タグ4の検知信号K4の大きさk2と、判定用車輪タグ41の検知信号K41の大きさk1とに差を持たせている。そこで、図9(c)に示すように、検知信号K4と検知信号K41を合計すると、時間軸tに対して非対称な波形の検知信号KGが得られる。波形が時間軸tに対して非対称とは、車輪11の回転方向が、検知信号KGの波形から判定できるということである。この検知信号KGの値の時間変化が、0→k1→k2→(k1+k2)のように変化しているのであれば、台車10はx方向に移動し、R方向に回転していると結論することができる。なお、時間差δは、上述の角度θに対応して発生する位相差である。また、検知信号K4と検知信号K41の周期は同じTである。
【0038】
図10(a)(b)(c)は、上述のk1,k2が互いに等しい場合に相当する。この場合、図10(c)に示すように、検知信号K4と検知信号K41を合計した検知信号KGは、時間軸tに対して対称な波形となる。この場合においても、一般的なタグと同様に、車輪タグ4と判定用車輪タグ41とが互いに識別された信号であるとすることにより、検知信号K4と検知信号K41とにより、車輪11の回転方向を判定することができる。これを図10(c)における検知信号KGの時間変化でみると、例えば、(検出なし)→(K4検出)→(K4,K41検出)→(K41検出)→(検出なし)となり、時間軸に対して非対称であることが分かる。本実施形態の台車搬送作業計測システム1によれば、簡単な遮蔽部5によって、安価かつ容易に、車輪11の回転方向、従って台車10の進行方向を判定することができる。
【0039】
(第5の実施形態)
図11は第5の実施形態に係る台車搬送作業計測システムを示す。本実施形態は、第1乃至第4のいずれかの実施形態の台車搬送作業計測システム1において、台車10の旋回速度を算出するようにしたものである。すなわち、本実施形態の台車搬送作業計測システム1は、台車10は左右に車輪11を有し、車輪タグ4および遮蔽部5(不図示)を左右の車輪11のそれぞれに対して設置している。また、演算部8は、左右の車輪タグ4に関する各検知情報に基づいて算出した左右の車輪11の回転速度の差分により台車10の旋回速度を算出する。なお、図中の車輪11aは操舵輪である。本実施形態の台車搬送作業計測システム1によれば、安価かつ容易に、旋回速度と方向を判定することができる。
【0040】
(第6の実施形態)
図12は第6の実施形態に係る台車搬送作業計測システムを示す。本実施形態は、第1乃至第4のいずれかの実施形態の台車搬送作業計測システム1において、より多くの情報を用いて、移動速度を計測するようにしたものである。すなわち、本実施形態の台車搬送作業計測システム1は、台車10は前後左右に車輪11,11aを有し、車輪タグ4および遮蔽部5(不図示)が前後左右の車輪11,11aのそれぞれに対して設置され、演算部8は、前後左右の車輪タグ4に関する各検知情報に基づいて台車10の旋回速度および移動速度を算出する。なお、図中の車輪11aは操舵輪である。本実施形態の台車搬送作業計測システム1によれば、より多くの情報を用いるので、スリップや検出不良などの外乱に対しても安定的に、移動速度を計測することができる。例えば、移動速度を、各車輪から求めた移動速度の平均値によって代表することができる。
【0041】
(第7の実施形態)
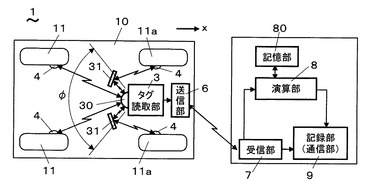
図13は第7の実施形態に係る台車搬送作業計測システムを示す。本実施形態の台車搬送作業計測システム1は、第1乃至第6のいずれかの実施形態において、タグ読取部3が各タグ4を電波によって読み取るかまたは検知する際に、タグ読取部3と車輪タグ4または判定用車輪タグ41(不図示)の間におけるタグ読取用電波の経路を確保するための電波反射板31を台車10備えている。本実施形態の台車搬送作業計測システム1によれば、タグ読取部3の電波を発信する部分30が複数の車輪タグ4に対する指向角φや距離を確保できない場合であっても、安価かつ容易に読取可能となる。
【0042】
なお、本発明は、上記構成に限られることなく種々の変形が可能である。例えば、上述した各実施形態の構成を互いに組み合わせた構成とすることができる。また、上述の実施形態において、4輪の台車10を図示して説明したが、台車10は4輪に限らず3輪でも本発明を適用できる。また、台車10は、人が押してまたは引いて操作するものに限らず、自律移動する台車であっても、本発明を適用できる。また、遮蔽部5や判定用遮蔽部51は、図1、図4、図6に示したような、半円形や4半円形のものに限らず、もっと遮蔽面積の小さい、または大きい遮蔽部でもよい。また、図6における遮蔽部5と判定用遮蔽部51の回転位置関係や、車輪タグ4と判定用車輪タグ41の回転位置関係は、図示したものに限らず、他の回転位置の配置でもよい。
【図面の簡単な説明】
【0043】
【図1】本発明の第1の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図2】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される位置タグの検知信号の時間変化図。
【図3】同上システムにおいて検知される車輪タグの検知信号の他の例を示す時間変化図。
【図4】第2の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図5】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)(c)はそれぞれ(a)に関連して検知される荷物タグの検知信号の一例を示す時間変化図。
【図6】第3の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図7】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図8】第4の実施形態に係る台車搬送作業計測システムの車輪タグと判定用車輪タグの配置を示す車輪部分の側面図。
【図9】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図10】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の他の例を示す時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図11】第5の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図12】第6の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図13】第7の実施形態に係る台車搬送作業計測システムの模式的構成図。
【符号の説明】
【0044】
1 台車搬送作業計測システム
2 位置タグ
3 タグ読取部
4 車輪タグ
5 遮蔽部
6 送信部
7 受信部
8 演算部
9 記録部(または通信部)
10 台車
11,11a 車輪
12 荷物
12a,12b 荷物タグ
31 電波反射板
41 判定用車輪タグ
51 判定用遮蔽部
【技術分野】
【0001】
本発明は、搬送用台車の移動と動作の情報を取得する搬送作業計測システムに関する。
【背景技術】
【0002】
従来から、生産現場における人が操作する台車の搬送作業効率を向上するため、一連の搬送作業の各所要時間を台車の動作について計測する搬送作業計測が行われている。例えば、建物内に位置情報を持つICタグを設置し、搬送用台車にICタグ読取装置と送信機を搭載し、搬送作業中に時間情報と読取装置によって読み取ったICタグの位置情報とを送信機によって上位のコンピュータに送信し、作業時間や作業内容などの分析が行われる。この場合、細かく位置情報を得たい場合にはICタグの設置を増やせばよく、また、測定内容や対象の変更をする場合にはICタグの位置を換えるだけで済むので、容易かつフレキシブルに搬送作業計測を実施できる。しかしながら、このような搬送作業計測においては、各ICタグ位置における位置情報と時間情報、すなわち点状の情報しか得られない。また、各点間を移動中の台車の動作情報を得るためにICタグを増やすとしても限界がある。
【0003】
そこで、搬送台車にエンコーダや加速度センサ等の計測機器を備えて、搬送台車の移動情報を逐一計測して上位コンピュータに送信することが考えられる。この場合、例えば、台車の移動時間と移動していない時間とを区別することができ、作業者が台車を離れて行っている作業時間を移動時間から分離し、搬送作業の内訳を精度良く把握できる。また、所定の走行経路を走行し、駆動輪の回転数から移動距離を求める無人の運搬台車において、走行経路中の所定位置に設けた走行距離補正点を検出することにより移動距離を補正するようにした運搬台車の走行制御方式が知られている(例えば、特許文献1参照)。
【特許文献1】特開昭63−255710号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したようなエンコーダや加速度センサ等の計測機器を備えた搬送作業計測においては、エンコーダや加速度センサ等の計測機器およびインターフェイス費用が高く、また運用面においても機器の搭載や配線取付などの操作が煩わしいという問題がある。また、上述した特許文献1に示されるような運搬台車の走行制御方式においては、高価な計測機器を備える必要がないとしても、上述の走行距離補正点が、位置情報を持つICタグに相当し、やはり、点状の情報しか得られないという問題がある。
【0005】
本発明は、上記課題を解消するものであって、簡単な構成により、台車の移動位置と移動速度を安価かつ容易に計測できる台車搬送作業計測システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を達成するために、請求項1の発明は、台車の搬送作業領域に複数設置された位置座標を有する位置タグと、この位置タグの位置情報を通信により読み取る台車に設置されたタグ読取部とを備えて台車の動作情報を取得する台車搬送作業計測システムにおいて、前記台車の車輪に設置され前記タグ読取部によってその存在が検知される車輪タグと、前記台車に固定され前記車輪タグの周回軌道を遮蔽して前記車輪タグが前記タグ読取部によって連続的に検知されるのを防止する遮蔽部と、前記台車に設置され前記タグ読取部が出力する前記位置タグからの位置情報および前記車輪タグを検知した旨の検知情報を前記台車の動作情報として該台車外部に送信する送信部と、前記台車の外部にあって前記送信部から送信された情報を受信する受信部と、前記受信部が受信した検知情報の出現頻度に基づいて前記台車の移動速度を算出する演算部と、前記演算部による算出結果を含む前記台車の動作情報を記録する記録部または前記動作情報を外部に送出する通信部と、を備えたものである。
【0007】
請求項2の発明は、請求項1に記載の台車搬送作業計測システムにおいて、前記タグ読取部は、前記台車に搭載される荷物に設置された荷物タグから少なくとも荷物の存在情報を取得して前記台車の動作情報として出力するものである。
【0008】
請求項3の発明は、請求項1または請求項2に記載の台車搬送作業計測システムにおいて、前記車輪タグを設置した車輪に設置された判定用車輪タグと、前記台車に固定され前記判定用車輪タグの周回軌道を遮蔽して前記判定用車輪タグが前記タグ読取部によって前記車輪タグとは異なる位相または異なる周期によって検知されるようにする判定用遮蔽部と、をさらに備え、前記判定用車輪タグが前記タグ読取部によって検知され、前記検知した旨の検知情報が前記送信部によって送信されると共に前記受信部によって受信され、前記演算部は、前記車輪タグおよび前記判定用車輪タグに関する検知情報の出現順序に基づいてこれらのタグが設置された車輪の回転方向を算出するものである。
【0009】
請求項4の発明は、請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システムにおいて、前記台車は左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記左右の車輪のそれぞれに対して設置され、前記演算部は、前記左右の車輪タグに関する各検知情報に基づいて算出した左右の車輪の回転速度の差分により前記台車の旋回速度を算出するものである。
【0010】
請求項5の発明は、請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システムにおいて、前記台車は前後左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記前後左右の車輪のそれぞれに対して設置され、前記演算部は、前記前後左右の車輪タグに関する各検知情報に基づいて前記台車の旋回速度および移動速度を算出するものである。
【0011】
請求項6の発明は、請求項1乃至請求項5のいずれか一項に記載の台車搬送作業計測システムにおいて、前記タグ読取部は前記各タグを電波によって読み取るかまたは検知するものであり、前記タグ読取部と前記車輪タグまたは判定用車輪タグの間におけるタグ読取用電波の経路を確保するための電波反射板を前記台車に備えたものである。
【発明の効果】
【0012】
請求項1の発明によれば、速度計測用機器やインターフェースおよび配線作業などを要さずに、搬送台車の各位置における移動速度を、安価かつ容易に、計測して記録することができる。
【0013】
請求項2の発明によれば、停止時における、各荷物の積み込み時間、または積み降ろし時間を安価かつ容易に、計測して記録することができる。
【0014】
請求項3の発明によれば、安価かつ容易に、車輪の回転方向、従って台車の進行方向を判定することができる。
【0015】
請求項4の発明によれば、安価かつ容易に、旋回速度と方向を判定することができる。
【0016】
請求項5の発明によれば、より多くの情報を用いるので、スリップや検出不良などの外乱に対しても安定的に、移動速度を計測することができる。
【0017】
請求項6の発明によれば、タグ読取部の電波を発信する部分が複数の車輪タグに対する指向角や距離を確保できない場合であっても、簡単な電波反射板によって電波の経路を確保するので、安価かつ容易に読取可能となる。
【発明を実施するための最良の形態】
【0018】
(第1の実施形態)
以下、本発明の実施形態に係る台車搬送作業計測システムについて、図面を参照して説明する。図1は第1の実施形態に係る台車搬送作業計測システムを示し、図2、図3はタグの検知信号を示す。台車搬送作業計測システム1は、図1に示すように、台車10の搬送作業領域に複数設置された位置座標を有する位置タグ2と、この位置タグ2の位置情報を通信により読み取る台車10に設置されたタグ読取部3とを備えて台車10の動作情報、すなわち、その移動と移動速度、停止、移動経路の要所々々における通過時刻や滞留時間などの情報を取得する計測システムである。台車10の動作情報は、台車10を用いる搬送作業の効率改善等に供される。
【0019】
台車搬送作業計測システム1は、台車10の車輪11に設置されタグ読取部3によってその存在が検知される車輪タグ4と、台車10に固定され車輪タグ4の周回軌道を遮蔽して車輪タグ4がタグ読取部3によって連続的に検知されるのを防止する遮蔽部5と、台車10に設置されタグ読取部3が出力する位置タグ2からの位置情報および車輪タグ4を検知した旨の検知情報を台車10の動作情報として台車10の外部に送信する送信部6と、台車10の外部にあって送信部6から送信された情報を受信する受信部7と、受信部7が受信した検知情報の出現頻度に基づいて台車10の移動速度を算出する演算部8と、演算部8による算出結果を含む台車10の動作情報を記録する記録部9を備えている。記録部9に代えて、または、記録部9に加えて、動作情報を外部に送出する通信部を備えることもできる。以下、各構成を詳細説明する。
【0020】
位置タグ2は、床面に添付または埋め込まれて配置されたRFID(電波による個体識別)タグである。一般にRFIDタグは、個体識別情報が埋め込まれ、電波などを用いた近距離(周波数帯によって数cm〜数m)の無線通信によって情報が読み取られる。従って、タグ読取部3は電波によって位置タグ2から情報を読み取る。位置タグ2から読み取られる情報は、その位置タグ2を配置した位置の座標値の情報である。なお、その情報は、座標値そのものではなく、その座標値を決定できる識別情報であってもよい。この場合、識別情報と座標値の対応表が援用される。
【0021】
車輪タグ4は、タグ読取部3から照射される電波に応答して電波を返すことによってタグ読取部3に検知される。車輪タグ4は、少なくともタグ読取部3によってその存在が検知さればよく、必ずしも識別情報などを読取可能に保持している必要はない。ただし、車輪タグ4と位置タグ2とは、識別可能とされている方が望ましい。車輪タグ4は、タグ読取部3によってその存在が検知されるように車輪11に固定されて車輪11と共に回転するように設けられる。ところが、遮蔽部5は、車輪11と共に回転する車輪タグ4の周回軌道の半分を、タグ読取部3から照射される電波に対して金属板や金属網などによって電磁遮蔽するように設けられている。従って、タグ読取部3は、遮蔽部5によって遮蔽されている周回軌道の半分の位置における車輪タグ4の存在を検知できない。
【0022】
タグ読取部3は、台車搬送作業計測システム1の動作中において、一定の制御周期のもとで、位置タグ2および車輪タグ4を検知すべく下方および車輪11に向けて電波を照射してタグからの電波を受信するタグ読取動作を行う。いずれかのタグを検知すると、その情報を送信部6を介して外部に送出する。受信部7、演算部8、および記録部9は、受信機能とCPUやメモリや外部記憶装置や表示装置や入力装置などの一般的な構成とを備えたコンピュータおよびその上のプロセスを用いて構成することができる。
【0023】
次に、台車搬送作業計測システム1による台車10の動作情報の取得の様子を説明する。台車10が、作業者によって押されて一定の速度で移動していると、図2(a)に示すように、タグ読取部3が車輪タグ4について取得する検知信号K4は、検知状態と非検知状態とを周期的に繰り返す信号となる。その繰り返しの周期T1は、上述から明らかなように車輪11の回転周期である。台車10がx方向に移動すると、車輪11はR方向に回転する。周期T1は、台車10の移動速度に1対1に対応するので、周期T1から車輪11の回転速度、従って、台車10の移動速度を求めることができる。ところで、図2(a)における検知信号K4は、直線によって示されているが、実際は測定点の集合である(このことは、他の検知信号においても同様である。)。そのような測定点のデータのうち、所定しきい値以上のデータが受信部7に送られ、演算部8によって処理されて、台車10の移動速度が、周期T1に応じて適宜算出される。算出された移動速度は、時間情報と共に記憶部に記録される。
【0024】
また、図2(b)に示すように、位置タグ2の検知信号K2が得られることにより、時刻t1に台車10が位置タグ2の上部を通過したことが分かる。タグ読取部3は、位置タグ2を検知している間に、位置タグ2から位置情報を読み取り、その情報を送信部6を介して送信する。受信部7は、タグ読取部3が位置タグ2を検知した時刻t1と共に時系列的に記録部9に記録させる。また、図3は、図2(a)に示した周期T1よりも大きな周期T2を有する検知信号K4の例であり、図2(a)の状態よりも遅い速度で移動していることを示す。また、時刻t2〜t3の間は検知信号がなく、台車10が停止していることを示す。なお、検知信号があっても、その信号が変化していない場合は、やはり台車10の停止状態を示す。これらの停止状態は、演算部8によってデータ処理された上で、速度ゼロと算出され、記録部9に記録される。
【0025】
上述のように、記録部9には、車輪タグ4によって得られた停止状態の情報を含む移動速度、および、位置タグ2によって得られた位置情報が、時間情報と共に時系列的に記録される。これらの計測により記録された情報は、後処理によって、またはリアルタイム処理によって、台車10の実際の移動経路の表示や、移動の所要時間解析などに供されて、搬送作業の効率向上に用いられる。
【0026】
また、上述したタグ読取部3が行うタグ読取動作の周期は、移動距離や移動速度を求める精度と、演算部8におけるデータの処理速度や、記録部9における記憶容量との兼ね合いで決められる。例えば、人が台車10を押して移動する場合の最高制限速度の状態において車輪11の1回転を検出できるように、測定間隔を設定することができる。この最高制限速度の場合、車輪11の半回転毎に、車輪タグ4の検知と非検知が繰り返され、車輪タグ4の検出情報は遮蔽部5の遮蔽により「有」「無」の2種類の情報となる。
【0027】
本実施形態の台車搬送作業計測システム1によれば、速度計測用機器やインターフェースおよび配線作業などを要さずに、搬送台車の各位置における移動速度を、安価かつ容易に、計測して記録することができる。すなわち、車輪タグ4は、タグ読取部3および遮蔽部5と共に、車輪の回転を検出する回転エンコーダを構成する。そして、車輪タグ4、および遮蔽部5は、車輪11および台車にに容易に設置できる。また、位置タグ2と、そのタグ読取部3とが既存の場合に、車輪タグ4用の読取部として、既存の位置タグ2用のタグ読取部3をそのまま併用することができる。
【0028】
(第2の実施形態)
図4は第2の実施形態に係る台車搬送作業計測システムを示し、図5(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第1の実施形態における台車搬送作業計測システム1において、図4に示すように、さらに、荷物12の存在有無の情報を取得して台車10の動作情報として出力するようにしたものである。すなわち、本実施形態のタグ読取部3は、一定の制御周期のもとで、位置タグ2および車輪タグ4に加え、台車10に搭載される荷物12に設置された荷物タグ12a,12bなどを検知すべく下方、車輪11、および上方に向けて電波を照射して、これらのタグからの電波を受信するタグ読取動作を行う。いずれかのタグを検知すると、その情報を送信部6を介して外部に送出する。照射用の電波として、指向性の少ないアンテナを用いればよい。また、位置タグ2、車輪タグ4、荷物タグ12a,12bなどの各タグは、タグの基本機能として、互いに識別可能とされている。
【0029】
図5(a)に示すように、車輪タグ4の検知信号K4の時間変化から、時刻t1〜t4の間において台車10が停止していることが分かる。また、図5(b)に示すように、時刻t2以降に、荷物タグ12aの検知信号Kaがないので、荷物タグ12aを有する荷物12が台車10から降ろされたことが分かる。さらに、図5(c)に示すように、時刻t3以降に、荷物タグ12bの検知信号Kbがないので、荷物タグ12bを有する荷物12が台車10から降ろされたことが分かる。このような、台車10に搭載された荷物12の有無の情報が、タグ読取部3によって検知され、最終的に、台車10の動作情報として記録部9に記録される。本実施形態の台車搬送作業計測システム1によれば、停止時における、各荷物12の積み込み時間、または積み降ろし時間を安価かつ容易に、計測して記録することができる。
【0030】
(第3の実施形態)
図6は第3の実施形態に係る台車搬送作業計測システムを示し、図7(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第1または第2の実施形態における台車搬送作業計測システム1において、図6に示すように、さらに、判定用車輪タグ41と、判定用遮蔽部51とを備えて車輪11の回転方向Rを検知するようにしたものである。すなわち、台車搬送作業計測システム1は、車輪タグ4を設置した車輪11に設置された判定用車輪タグ41と、台車10に固定され判定用車輪タグ41の周回軌道を遮蔽して判定用車輪タグ41がタグ読取部3によって車輪タグ4とは異なる周期によって検知されるようにする判定用遮蔽部51と、現在の検知情報と比較して回転方向の判定に用いる直前の検知情報を記憶するための記憶部80と、を備えている。
【0031】
判定用車輪タグ41はタグ読取部3によって検知され、その検知した旨の検知情報が送信部6によって送信されると共に受信部7によって受信される。演算部8は、車輪タグ4および判定用車輪タグ41に関する検知情報の出現順序に基づいてこれらのタグが設置された車輪11の回転方向Rを算出する。
【0032】
判定用車輪タグ41は、車輪タグ4を配置した半径上であって、より中心側に配置されている。また、判定用遮蔽部51は、判定用車輪タグ41の周回軌道を4分の1づつ交互に遮蔽するように設けられている。車輪タグ4が、遮蔽部5によって周回軌道の半分を遮蔽されているので、判定用車輪タグ41は車輪タグ4の半分の周期のもとで、タグ読取部3によって検知される。
【0033】
図7(a)に示すように、車輪タグ4の検知信号K4における検知周期がTであるのに対して、図7(b)に示すように、判定用車輪タグ41の検知信号K41における周期はT/2となっている。ここで、図7(c)に示すように、検知信号K4と検知信号K41を合計すると、時間軸tに対して非対称な波形の検知信号KGが得られる。波形が時間軸tに対して非対称とは、車輪11の回転方向が、検知信号KGの波形から判定できるということである。
【0034】
図7(c)に示す状況は、図6における台車10がx方向に移動し、車輪11がR方向に回転している状態を示す。検知信号KGは、時間tの経過とともに、値が(0→2)、または(2→1)、または(1→0)のように変化している。もし、この検知信号KGの値の時間変化が、(0→1)、または(1→2)、または(2→0)のように変化しているのであれば、台車10はx方向とは反対方向に移動し、R方向とは反対方向に回転していると結論することができる。回転方向を判定するために、演算部8は過去の検知情報と現在の検知情報とを比較する必要があり、記憶部80が直前の検知情報を記憶している。なお、記憶部80は、演算部8に内蔵することもできる。
【0035】
本実施形態の台車搬送作業計測システム1によれば、安価かつ容易に、車輪11の回転方向、従って台車10の進行方向を判定することができる。
【0036】
(第4の実施形態)
図8は第4の実施形態に係る台車搬送作業計測システムを示し、図9(a)(b)(c)はタグ検知信号の一例を示す。本実施形態は、第3の実施形態における判定用遮蔽部51を遮蔽部5と共通にしたものである。すなわち、本実施形態における判定用車輪タグ41は、車輪11において、車輪タグ4が配置されている半径上とは異なる半径上に配置し、車輪タグ4の検知信号と判定用車輪タグ41の検知信号の時間変化の位相を異ならせることにより、車輪11の回転方向を判定する。両半径の成す角度θは、0゜<θ<180゜であればよいが、90゜が好適である。本実施形態では、θ=90゜とされている。
【0037】
また、図9(a)(b)に示すように、車輪タグ4の検知信号K4の大きさk2と、判定用車輪タグ41の検知信号K41の大きさk1とに差を持たせている。そこで、図9(c)に示すように、検知信号K4と検知信号K41を合計すると、時間軸tに対して非対称な波形の検知信号KGが得られる。波形が時間軸tに対して非対称とは、車輪11の回転方向が、検知信号KGの波形から判定できるということである。この検知信号KGの値の時間変化が、0→k1→k2→(k1+k2)のように変化しているのであれば、台車10はx方向に移動し、R方向に回転していると結論することができる。なお、時間差δは、上述の角度θに対応して発生する位相差である。また、検知信号K4と検知信号K41の周期は同じTである。
【0038】
図10(a)(b)(c)は、上述のk1,k2が互いに等しい場合に相当する。この場合、図10(c)に示すように、検知信号K4と検知信号K41を合計した検知信号KGは、時間軸tに対して対称な波形となる。この場合においても、一般的なタグと同様に、車輪タグ4と判定用車輪タグ41とが互いに識別された信号であるとすることにより、検知信号K4と検知信号K41とにより、車輪11の回転方向を判定することができる。これを図10(c)における検知信号KGの時間変化でみると、例えば、(検出なし)→(K4検出)→(K4,K41検出)→(K41検出)→(検出なし)となり、時間軸に対して非対称であることが分かる。本実施形態の台車搬送作業計測システム1によれば、簡単な遮蔽部5によって、安価かつ容易に、車輪11の回転方向、従って台車10の進行方向を判定することができる。
【0039】
(第5の実施形態)
図11は第5の実施形態に係る台車搬送作業計測システムを示す。本実施形態は、第1乃至第4のいずれかの実施形態の台車搬送作業計測システム1において、台車10の旋回速度を算出するようにしたものである。すなわち、本実施形態の台車搬送作業計測システム1は、台車10は左右に車輪11を有し、車輪タグ4および遮蔽部5(不図示)を左右の車輪11のそれぞれに対して設置している。また、演算部8は、左右の車輪タグ4に関する各検知情報に基づいて算出した左右の車輪11の回転速度の差分により台車10の旋回速度を算出する。なお、図中の車輪11aは操舵輪である。本実施形態の台車搬送作業計測システム1によれば、安価かつ容易に、旋回速度と方向を判定することができる。
【0040】
(第6の実施形態)
図12は第6の実施形態に係る台車搬送作業計測システムを示す。本実施形態は、第1乃至第4のいずれかの実施形態の台車搬送作業計測システム1において、より多くの情報を用いて、移動速度を計測するようにしたものである。すなわち、本実施形態の台車搬送作業計測システム1は、台車10は前後左右に車輪11,11aを有し、車輪タグ4および遮蔽部5(不図示)が前後左右の車輪11,11aのそれぞれに対して設置され、演算部8は、前後左右の車輪タグ4に関する各検知情報に基づいて台車10の旋回速度および移動速度を算出する。なお、図中の車輪11aは操舵輪である。本実施形態の台車搬送作業計測システム1によれば、より多くの情報を用いるので、スリップや検出不良などの外乱に対しても安定的に、移動速度を計測することができる。例えば、移動速度を、各車輪から求めた移動速度の平均値によって代表することができる。
【0041】
(第7の実施形態)
図13は第7の実施形態に係る台車搬送作業計測システムを示す。本実施形態の台車搬送作業計測システム1は、第1乃至第6のいずれかの実施形態において、タグ読取部3が各タグ4を電波によって読み取るかまたは検知する際に、タグ読取部3と車輪タグ4または判定用車輪タグ41(不図示)の間におけるタグ読取用電波の経路を確保するための電波反射板31を台車10備えている。本実施形態の台車搬送作業計測システム1によれば、タグ読取部3の電波を発信する部分30が複数の車輪タグ4に対する指向角φや距離を確保できない場合であっても、安価かつ容易に読取可能となる。
【0042】
なお、本発明は、上記構成に限られることなく種々の変形が可能である。例えば、上述した各実施形態の構成を互いに組み合わせた構成とすることができる。また、上述の実施形態において、4輪の台車10を図示して説明したが、台車10は4輪に限らず3輪でも本発明を適用できる。また、台車10は、人が押してまたは引いて操作するものに限らず、自律移動する台車であっても、本発明を適用できる。また、遮蔽部5や判定用遮蔽部51は、図1、図4、図6に示したような、半円形や4半円形のものに限らず、もっと遮蔽面積の小さい、または大きい遮蔽部でもよい。また、図6における遮蔽部5と判定用遮蔽部51の回転位置関係や、車輪タグ4と判定用車輪タグ41の回転位置関係は、図示したものに限らず、他の回転位置の配置でもよい。
【図面の簡単な説明】
【0043】
【図1】本発明の第1の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図2】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される位置タグの検知信号の時間変化図。
【図3】同上システムにおいて検知される車輪タグの検知信号の他の例を示す時間変化図。
【図4】第2の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図5】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)(c)はそれぞれ(a)に関連して検知される荷物タグの検知信号の一例を示す時間変化図。
【図6】第3の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図7】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図8】第4の実施形態に係る台車搬送作業計測システムの車輪タグと判定用車輪タグの配置を示す車輪部分の側面図。
【図9】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図10】(a)は同上システムにおいて検知される車輪タグの検知信号の時間変化図、(b)は(a)に関連して検知される判定用車輪タグの検知信号の他の例を示す時間変化図、(c)は(a)(b)の検知信号を合成して成る信号の時間変化図。
【図11】第5の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図12】第6の実施形態に係る台車搬送作業計測システムの模式的構成図。
【図13】第7の実施形態に係る台車搬送作業計測システムの模式的構成図。
【符号の説明】
【0044】
1 台車搬送作業計測システム
2 位置タグ
3 タグ読取部
4 車輪タグ
5 遮蔽部
6 送信部
7 受信部
8 演算部
9 記録部(または通信部)
10 台車
11,11a 車輪
12 荷物
12a,12b 荷物タグ
31 電波反射板
41 判定用車輪タグ
51 判定用遮蔽部
【特許請求の範囲】
【請求項1】
台車の搬送作業領域に複数設置された位置座標を有する位置タグと、この位置タグの位置情報を通信により読み取る台車に設置されたタグ読取部とを備えて台車の動作情報を取得する台車搬送作業計測システムにおいて、
前記台車の車輪に設置され前記タグ読取部によってその存在が検知される車輪タグと、
前記台車に固定され前記車輪タグの周回軌道を遮蔽して前記車輪タグが前記タグ読取部によって連続的に検知されるのを防止する遮蔽部と、
前記台車に設置され前記タグ読取部が出力する前記位置タグからの位置情報および前記車輪タグを検知した旨の検知情報を前記台車の動作情報として該台車外部に送信する送信部と、
前記台車の外部にあって前記送信部から送信された情報を受信する受信部と、
前記受信部が受信した検知情報の出現頻度に基づいて前記台車の移動速度を算出する演算部と、
前記演算部による算出結果を含む前記台車の動作情報を記録する記録部または前記動作情報を外部に送出する通信部と、を備えたことを特徴とする台車搬送作業計測システム。
【請求項2】
前記タグ読取部は、前記台車に搭載される荷物に設置された荷物タグから少なくとも荷物の存在情報を取得して前記台車の動作情報として出力することを特徴とする請求項1に記載の台車搬送作業計測システム。
【請求項3】
前記車輪タグを設置した車輪に設置された判定用車輪タグと、
前記台車に固定され前記判定用車輪タグの周回軌道を遮蔽して前記判定用車輪タグが前記タグ読取部によって前記車輪タグとは異なる位相または異なる周期によって検知されるようにする判定用遮蔽部と、をさらに備え、
前記判定用車輪タグが前記タグ読取部によって検知され、前記検知した旨の検知情報が前記送信部によって送信されると共に前記受信部によって受信され、
前記演算部は、前記車輪タグおよび前記判定用車輪タグに関する検知情報の出現順序に基づいてこれらのタグが設置された車輪の回転方向を算出することを特徴とする請求項1または請求項2に記載の台車搬送作業計測システム。
【請求項4】
前記台車は左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記左右の車輪のそれぞれに対して設置され、
前記演算部は、前記左右の車輪タグに関する各検知情報に基づいて算出した左右の車輪の回転速度の差分により前記台車の旋回速度を算出することを特徴とする請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システム。
【請求項5】
前記台車は前後左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記前後左右の車輪のそれぞれに対して設置され、
前記演算部は、前記前後左右の車輪タグに関する各検知情報に基づいて前記台車の旋回速度および移動速度を算出することを特徴とする請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システム。
【請求項6】
前記タグ読取部は前記各タグを電波によって読み取るかまたは検知するものであり、前記タグ読取部と前記車輪タグまたは判定用車輪タグの間におけるタグ読取用電波の経路を確保するための電波反射板を前記台車に備えたことを特徴とする請求項1乃至請求項5のいずれか一項に記載の台車搬送作業計測システム。
【請求項1】
台車の搬送作業領域に複数設置された位置座標を有する位置タグと、この位置タグの位置情報を通信により読み取る台車に設置されたタグ読取部とを備えて台車の動作情報を取得する台車搬送作業計測システムにおいて、
前記台車の車輪に設置され前記タグ読取部によってその存在が検知される車輪タグと、
前記台車に固定され前記車輪タグの周回軌道を遮蔽して前記車輪タグが前記タグ読取部によって連続的に検知されるのを防止する遮蔽部と、
前記台車に設置され前記タグ読取部が出力する前記位置タグからの位置情報および前記車輪タグを検知した旨の検知情報を前記台車の動作情報として該台車外部に送信する送信部と、
前記台車の外部にあって前記送信部から送信された情報を受信する受信部と、
前記受信部が受信した検知情報の出現頻度に基づいて前記台車の移動速度を算出する演算部と、
前記演算部による算出結果を含む前記台車の動作情報を記録する記録部または前記動作情報を外部に送出する通信部と、を備えたことを特徴とする台車搬送作業計測システム。
【請求項2】
前記タグ読取部は、前記台車に搭載される荷物に設置された荷物タグから少なくとも荷物の存在情報を取得して前記台車の動作情報として出力することを特徴とする請求項1に記載の台車搬送作業計測システム。
【請求項3】
前記車輪タグを設置した車輪に設置された判定用車輪タグと、
前記台車に固定され前記判定用車輪タグの周回軌道を遮蔽して前記判定用車輪タグが前記タグ読取部によって前記車輪タグとは異なる位相または異なる周期によって検知されるようにする判定用遮蔽部と、をさらに備え、
前記判定用車輪タグが前記タグ読取部によって検知され、前記検知した旨の検知情報が前記送信部によって送信されると共に前記受信部によって受信され、
前記演算部は、前記車輪タグおよび前記判定用車輪タグに関する検知情報の出現順序に基づいてこれらのタグが設置された車輪の回転方向を算出することを特徴とする請求項1または請求項2に記載の台車搬送作業計測システム。
【請求項4】
前記台車は左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記左右の車輪のそれぞれに対して設置され、
前記演算部は、前記左右の車輪タグに関する各検知情報に基づいて算出した左右の車輪の回転速度の差分により前記台車の旋回速度を算出することを特徴とする請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システム。
【請求項5】
前記台車は前後左右に車輪を有し、前記車輪タグおよび前記遮蔽部が前記前後左右の車輪のそれぞれに対して設置され、
前記演算部は、前記前後左右の車輪タグに関する各検知情報に基づいて前記台車の旋回速度および移動速度を算出することを特徴とする請求項1乃至請求項3のいずれか一項に記載の台車搬送作業計測システム。
【請求項6】
前記タグ読取部は前記各タグを電波によって読み取るかまたは検知するものであり、前記タグ読取部と前記車輪タグまたは判定用車輪タグの間におけるタグ読取用電波の経路を確保するための電波反射板を前記台車に備えたことを特徴とする請求項1乃至請求項5のいずれか一項に記載の台車搬送作業計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−108312(P2010−108312A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−280450(P2008−280450)
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]