
右折可能道路判定装置及びその方法、並びに判定対象道路が右折可能か否かを判定するためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】実際の道路における右折の可能性を、自動的に判定できる装置及びその方法を提供する。
【解決手段】プローブ情報を保存するプローブ情報メモリ11と、判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリ20と、プローブ情報メモリ11から読み出したプローブ情報のうち第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置16と、該プローブ情報抽出装置16が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタ17と、該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置18と、を備える右折可能道路判定装置である。
【解決手段】プローブ情報を保存するプローブ情報メモリ11と、判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリ20と、プローブ情報メモリ11から読み出したプローブ情報のうち第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置16と、該プローブ情報抽出装置16が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタ17と、該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置18と、を備える右折可能道路判定装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は右折可能道路判定装置及びその方法に関する。更に詳しくは、この発明はナビゲーションシステム用等の道路地図のコンテンツとしての判定対象道路が右折可能であるか否かを判定するのに適した技術に関する。
【背景技術】
【0002】
従来、道路地図のコンテンツ(道路、交差点、信号機等々)の更新はフィールドワークにより行われていた。例えば、地域ごとに担当者が割り当てられ、担当者がその地区を巡回することにより、道路地図のコンテンツの内容(道路情報)を確認していた。ここに、コンテンツに付随する道路情報として、一方通行規制、進入禁止規制、交差点の信号機有無などを挙げることができる。これらの道路情報はナビゲーションシステムを稼動させるために利用される。
かかる道路情報を人手に頼って更新するには多大な時間とコストを費やす必要があった。
省力化のため。更新すべき対象を自動的に抽出する技術が特許文献1〜特許文献3に紹介されている。この技術では、プローブカーを用いて道路情報を収集している。
【特許文献1】特開2005−267470号公報
【特許文献2】特開2005−267471号公報
【特許文献3】特開2005−267472号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
走行中に反対車線側の店舗等の駐車場へ駐車するため、道路途中で右折することが車輌の実際の運行中にはしばしば行われる。しかしながら、ナビゲーションシステムで使用される道路地図には、道路情報として、道路途中における右折の可否に関する情報が含まれていなかった。
カーナビゲーションシステム用の道路地図がかかる情報を備えることになれば、目的地探索等において、利用者により便利なルートを提案可能となる。
そこでこの発明は、カーナビゲーション用の道路地図にかかる道路情報を付与できるよう、実際の道路における右折の可能性を、自動的に判定できる装置及びその方法を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は上記目的を達成するためにされた。
本発明の第1の局面は次のように規定することができる。即ち、
プローブ情報を保存するプローブ情報メモリと、
判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリと、
前記プローブ情報メモリから読み出したプローブ情報のうち前記第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置と、
該プローブ情報抽出装置が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタと、
該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置と、
を備えることを特徴とする右折可能道路判定装置。
【0005】
このように規定される第1の局面の右折可能道路判定装置によれば、プローブカーの走行履歴であるプローブ情報の中に右折した車輌が位置すると推定される第1の座標情報を有するものが多数(第1の閾値以上)存在するとき、当該判定対象道路において多数の車輌が右折したという事実が確認できたとして、当該判定対象道路は右折可能であると判定する。
【0006】
この発明の第2の局面は次のように規定できる。
即ち、第1の局面で規定される右折可能道路判定装置において、前記判定対象道路の道路情報を保存する道路情報メモリと、
前記カウンタによるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、前記道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定装置が更に備えられる。
このように規定される第2の局面の右折可能道路判定装置によれば、第1の座標情報を有するプローブ情報が第1の閾値に満たないまでも、第2の閾値を超える場合には、判定対象道路に付随する道路情報を参照し、判定対象道路が右折可能であるか否かを判定する。これにより、右折可能判定の精度が向上する。ここに、第2の判定装置が利用する道路情報としては、右折可能情報、右折可能性信頼度、道路種別などがある。そのうちの1又は2以上を任意に参照できる。
【0007】
右折可能情報としては、右折可能性を否定する右折阻害情報及び右折可能性を肯定する右折肯定情報がある。右折阻害情報としては中央分離帯の存在がある。右折肯定情報としてはこの発明を実行して得られた道路情報が利用できる。即ち、右折可能という所定の道路に右折可能という道路情報が付随していたとしても、当該道路の道路情報は折々に更新する必要があるからである。
【0008】
右折可能性信頼度は車線数、中央分離帯の有無等に基づき規定される。例えば片側複数車線の道路や中央分離帯のある道路では右折可能性信頼度が小さくなる。また、交差点からの距離が近いところでも右折可能性信頼度は小さくなる。道路種別では国道、都道府県道、市町村道の順に右折可能性信頼度は高くなる。当該右折可能性信頼度は道路情報ごとに付与され、判定対象道路に付随する道路情報において右折可能性信頼度の付与されたものの平均値を演算し、演算結果に従って右折の可能性を判定する。例えば、平均値が所定の閾値を超えたときに、右折可能と判定し、平均値が他の閾値未満のとき、右折不能と判定する。
【0009】
この発明の第3の局面は次のように規定される。即ち、
プローブ情報読み出し装置が、プローブ情報メモリからプローブ情報を読み出す読み出しステップと、
プローブ情報抽出装置が、第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出ステップと、
カウンタが、前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウントステップと、
第1の判定装置が、前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定ステップと、
を含むことを特徴とする右折可能道路判定方法。
このように規定される第3の局面の右折可能道路判定方法によれば、第1の局面の発明と同様にして、判定対象道路の右折可能性を自動的に判定できる。
【0010】
この発明の第4の局面は次のように規定できる。即ち、
第3の局面で規定した右折可能道路判定方法において、第2の判定装置が、前記カウンタステップにおけるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定ステップが、更に含まれる。
このように規定される第4の局面の右折可能道路判定方法によれば、第2の局面の発明と同様にして、右折可能性判断の精度が向上する。
【0011】
第3の局面及び第4の局面として規定される右折可能道路判定方法をコンピュータシステムに実行させるためのコンピュータプログラムが第5及び第6の局面として規定される。これら第5及び第6の局面で規定されるコンピュータプログラムを記録する記録媒体が第7の局面として規定される。
【発明を実施するための最良の形態】
【0012】
この発明において、プローブカーのプローブ情報には少なくともその座標情報(緯度及び経度)と当該座標にプローブカーが存在するときの方位情報とが含まれる。GPS等の位置検出機能を有する車両であればこれらの情報を特定することができる。また、例えば特開2002−150495号公報に記載されているように、車両のナビゲーションシステムと基地局との間で双方向の情報伝達を行うシステムは周知である。したがって、当該情報伝達システムを利用すればナビゲーションシステムを装備した一般車両をプローブカーとして使用することができる。勿論、道路情報を収集するための専用機器を搭載したプローブカーの使用を排除するものではない。
【0013】
プローブ情報として、上記座標情報と方位情報の他に、プローブカーの車両状況に関する情報を用いることもできる。プローブカーの車両状況に関する情報としてプローブカーの時間情報、ウインカーランプ、ハンドル、ブレーキ、ライト及び速度等に関する情報を挙げることができる。より具体的には、ウインカーランプ、ブレーキ、ライトについてはそれらのオン・オフが検出され、ハンドルについてはその回転角度が検出され、速度については速度計の数値が検出される。
更には車輌の発進及び停止の情報もプローブ情報として使用することができる。
【0014】
プローブ情報としてマップマッチング等により補正されたものを用いることもできる。これにより、プローブ情報に含まれる誤差を減少することができる。
ここに、マップマッチングとは、カーナビゲーションシステムにおいてプローブカーの位置を地図情報の道路上から外れないようにする技術であり、これにより、プローブカーの位置が常に道路上に存在することとなる。マップマッチングを行うためにはカーナビゲーションシステムにおいてプローブカーの座標情報、方位情報、移動距離などから走行軌跡が形成され、この走行軌跡が地図情報にある道路形状データに照らしあわされる。道路形状データは複数存在するので、所定の優先度に従って重み付けを行い、一つの道路を選択する。そして、プローブカーの座標を当該道路上の座標へと変更する。
以上詳細はカーナビゲーションシステム(公開型データ構造KIWIとその利用方法)、第4章、共立出版、等を参照されたい。
また、このマップマッチングはプローブカーからプローブ情報を受け取った基地局側で行ってもよい。
【0015】
この発明では、右折可能であるか否かの判定対象となる道路に関連するプローブ情報をその座標情報に基づき抽出する。
判定対象道路から右折した車輌が位置すると推定される第1の座標と同じ座標を含むプローブ情報を抽出する。当該座標を含むプローブ情報は判定対象道路上において実際に右折したプローブカーの生成したものである。本発明者らの検討によれば、プローブ情報においてその座標情報には多少の誤差が含まれるので、他の道路からの影響を排除するために道路において両端(交差点等)から所定の距離(第1の距離)内にあるものはキャンセルすることが好ましい。また、交差点内では右左折するプローブカーの向きが道路に沿っておらず、方位情報が不安定になるおそれがある。後述するように判定対象道路が右折可能であるか否かの判定が第1の座標を有するプローブ情報の数に基づいて行われる。従って、予め不安定なプローブ情報は除去しておくことが好ましい。
第1の距離は、交差点の形状(交差する道路の幅、交差数、交差する道路の角度)などから適宜設定できる。
【0016】
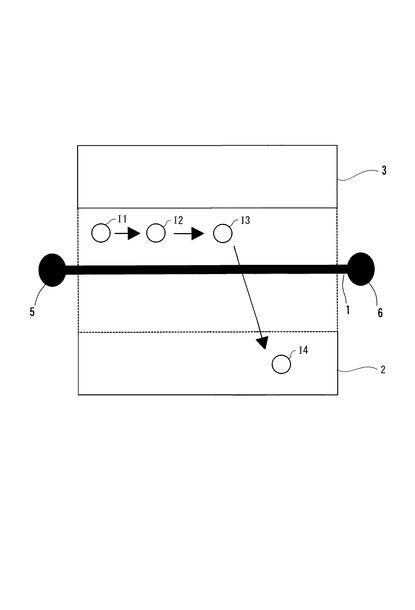
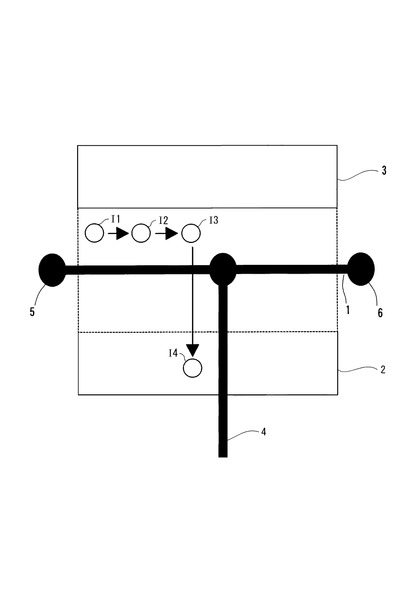
判定対象道路がリンクとして表現されている場合は、図1に示すように、当該リンク1を中心とした所定幅(第1の幅)の外側に仮想領域2及び仮想領域3を設定する。そして当該仮想領域2,3内の座標と一致する座標情報を含むプローブ情報I4が抽出する。このプローブ情報I4は直前の数個のプローブ情報I1〜I3がリンク1より上側に存在していることが前提である。即ち、一連のプローブ情報から仮想領域2内に存在するプローブ情報が右折した車輌の位置を表すものであることが確認されなければならない。それ以前のプローブ情報がリンク1より下側の車線に存在していたものは、たとえそのプローブ情報が仮想領域2に存在したとしても、有効なプローブ情報として抽出されることはない。
上記において、リンク1と各仮想領域2、3との距離は判定対象道路の道路幅と一致させることができる。
【0017】
以下、説明の都合上、図示された道路において上側半分(図1ではリンク1より上側部分)の車線を走行したプローブカーにより得られたプローブ情報I1〜I3のみに着目する。図1に従えば、上側の車線より右折した車輌は仮想領域2に少なくとも一旦は位置することとなる。勿論、図1において下側の車線より右折した車輌は仮想領域3に少なくとも一旦は位置することになるが、その説明については省略する。
【0018】
かかる仮想領域2を設定した場合においてもリンク1の両端(即ちノード)5、6から第1の距離(例えば5m)以内にあるものはキャンセルすることが好ましい。
この仮想領域2の座標を示す座標情報が第1の座標情報となる。
プローブ情報I1〜I4は、座標情報、時間情報を少なくとも含む。その他、ウインカー情報やハンドル角情報等を含むこともできる。
【0019】
仮想領域2に存在するプローブ情報の数を判定対象道路毎にカウントし、そのカウント数に基づいて判定対象道路が右折可能か否かを判定する。
例えば、充分数(第1の閾値以上:例えば100以上)のプローブ情報が仮想領域2内に存在すれば、多くのプローブカーが実際に当該判定対象道路で右折したこととなる。従って、当該判定対象道路は右折可能であると判定することが妥当である。
仮想領域2におけるプローブ情報の数がゼロの判定対象道路については、右折不可能と判断すべきであり、またプローブ情報の数が数個の場合においても、誤差の危険性を考慮して、右折可能と判断することはできない。
他方、第1の閾値数には満たないが相当数(第2の閾値数:例えば数十個)以上のプローブ情報が仮想領域2内に存在するときは、当該判定対象道路における右折の可能性を判定するにあたり、判定対象道路のリンク1に付随する道路情報を参照する。例えば、道路幅が広いとき(片側複数車線を示す)は、対向車が多いので右折困難であり、右折の可能性を否定する情報となる。
【実施例】
【0020】
以下、この発明の実施例について説明をする。
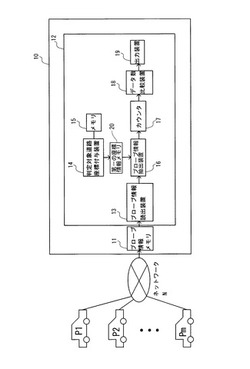
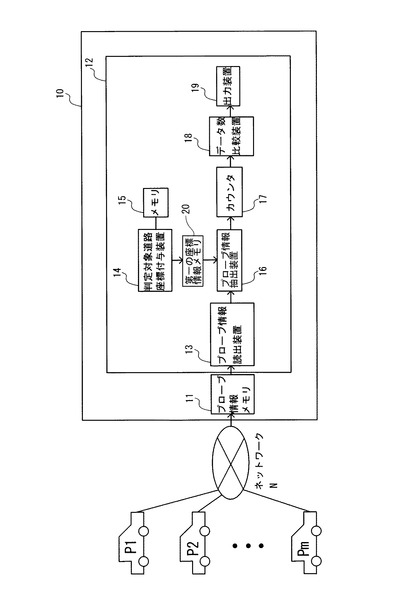
図2はこの発明の右折可能道路判定装置の機能ブロック図を示す。
プローブカーP1、P2 … Pmはそのコンピュータがインターネット等のネットワークNへ無線で連結されている。プローブカーは所定のインターバルでプローブ情報を発信する。このプローブ情報には当該プローブカーの現在の座標情報(X,Y)、方位情報(D)、時間(T)及びその他の情報が含まれる。このプローブ情報はネットワークNを介して中央制御装置10へ伝達され、そのプローブ情報メモリ11へ格納される。
プローブ情報を伝達する方法は上記ネットワークを介する方法に限定されず、プローブカー内のメモリへ一旦格納し、当該メモリから直接又は有線を介してプローブ情報メモリ11へプローブ情報を供給することもできる。
【0021】
右折可能道路判定装置12は、判定対象となる道路を特定するために判定対象道路座標付与装置14を備える。当該装置14においてオペレータが特定の道路を指定すると、当該道路のリンク1がメモリ15から読出され、図1に示すように、リンク1を中心として仮想領域2が自動的に指定される。なお、ノード5、6から5mの範囲においては領域指定から外される。これは、プローブ情報に含まれる誤差をキャンセルするためである。仮想領域2の座標(第1の座標情報)が特定され、第1の座標情報メモリ20に保存される。
プローブ情報メモリ11に格納されているプローブ情報がプローブ情報読出装置13により読み出され、さらに第1の座標情報メモリ20から第1の座標情報が読み出されて、プローブ情報抽出装置16において各プローブ情報における座標情報と第1の座標情報(仮想領域2の座標情報)とが比較される。
【0022】
プローブ情報抽出装置16において第1の座標情報と一致した座標情報を有するプローブ情報は判定対象道路毎にカウンタ17へ送られる。このカウンタ17はプローブ情報抽出装置16より送られてくるプローブ情報の数をカウントする。このプローブ情報の数は図1において仮想領域2内に有効に存在するプローブ情報の数を指している。
【0023】
カウント数と所定の閾値とがデータ数比較装置18で比較される。即ち、カウント数が第1の閾値以上のときは右折可能と判定する。判定結果は出力装置19により外部出力される。
【0024】
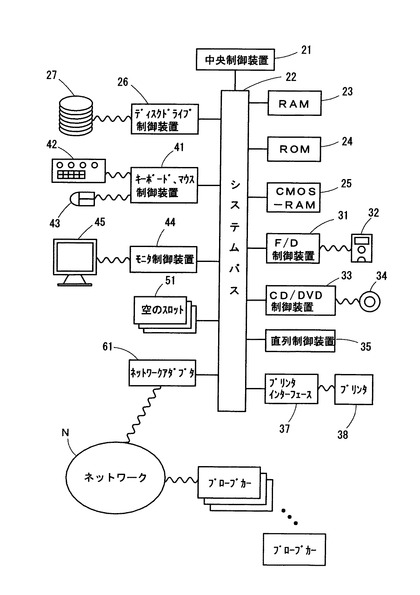
図3は右折可能道路判定装置12のハード構成を示すブロック図である。
この装置12のハード構成は、一般的なコンピュータシステムと同様に中央制御装置21に対してシステムバス22を介して各種の要素が結合されたものである。
中央制御装置21は汎用的なCPU、メモリ制御装置、バス制御装置、割り込み制御装置更にはDMA(直接メモリアクセス)装置を含み、システムバス22もデータライン、アドレスライン、制御ラインを含む。システムバス22にはRAM(ランダムアクセスメモリ)23、不揮発メモリ(ROM24,CMOS−RAM25等)からなるメモリ回路が接続されている。RAM23には中央制御装置21や他のハードウエア要素によって読み取られたり、書き換えられたりする。不揮発メモリのデータは読み取り専用であり、装置をオフとしたときにもそこのデータは喪失されない。このハードウエアを制御するシステムプログラムはハードディスク装置27に保存されており、また、RAM23に保存されており、ディスクドライブ制御装置26を介して適宜中央制御装置21に読みこまれて使用される。このハードディスク装置27には、汎用的な構成のコンピュータシステムを右折可能道路判定装置12として動作させるためのコンピュータプログラムが保存する領域が確保される。
このハードディスク装置27の所定の領域に地図情報及び道路情報が保存されている。地図情報は道路を指定するためのノードとリンク含み、道路情報は道路種別、制限速度、路幅、中央分離帯の有無、各種規制情報(一方通行規制等)を含んでいる。
ハードディスク装置27の他の領域にプローブ情報が保存されている。
【0025】
システムバス22には、フレキシブルディスク32に対してデータの読み込み及び書き込みを行うフレキシブルドライブ制御装置31、コンパクトディスク34に対してそれからデータの読み取りを行うCD/DVD制御装置33が接続されている。この実施例ではプリンタインターフェース37にプリンタ38を接続させている。
【0026】
システムバス22にはキーボード・マウス制御装置41が接続され、キーボード42及びマウス43からのデータ入力を可能としている。モニタ45がモニタ制御装置44を介してシステムバス22に接続されている。モニタ45にはCRTタイプ、液晶タイプ、プラズマディスプレイタイプなどを利用することができる。
各種の要素(モデムなど)の増設を可能とするため空きのスロット51が準備されている。
【0027】
実施例のシステムはネットワークアダプタ61を介して、ネットワークNに接続される。このネットワーク(インターネット)Nにはプローブカーが連結されている。
【0028】
このコンピュータシステムからなる右折可能道路判定装置12を稼動させるために必要なプログラム(OSプログラム、アプリケーションプログラム(本発明のものも含む))は、各種の記録媒体を介してシステムの中にインストールされる。例えば非書き込み記録媒体(CD−ROM、ROMカード等)、書き込み可能記録媒体(FD、DVD等)、更にはネットワークNを利用して通信媒体の形式でインストールすることも可能である。勿論、不揮発メモリ24、25やハードディスク装置27に予めこれらのプログラムを書きこんでおくこともできる。
【0029】
このようなコンピュータシステムによれば、プローブカーからのプローブ情報は全てネットワークアダプタ61を介してシステム内に取り込まれ、一旦ハードディスク27の所定のフォルダに保存される。次に、ハードディスク27に保存された全プローブ情報から所定のプローブ情報を抽出する。抽出されたプローブ情報は一旦RAM23に保存される。
次に、中央制御装置21はハードディスク27に保存されていた所定のプログラムに従い、RAM23のプローブ情報に基づき判定対象道路の右折可能性を判定する。
【0030】
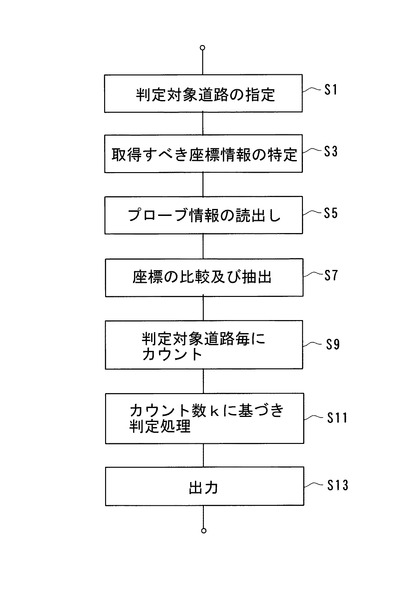
以下、実施例の右折可能道路判定装置12の動作を説明する(図4のフローチャート参照)。
ステップ1においては、右折可能性の判定対象となる道路のリンクを道路地図上において指定する。より具体的には、ハードディスク装置27に保存されている道路地図に基づき、ディスプレイ45に地図を表示させ、地図上において判定対象となる道路をグラフィックインターフェースにより指定する。判定対象道路が指定されると、中央制御装置21は、図1に示すように、ハードディスク装置27から対応するリンク1とノード5、6を指定する。
次にステップ3において、図1に示すとおり、中央演算装置21は判定対象道路座標付与装置14として、仮想領域2を特定する。この仮想領域2はリンク1から片側の道路幅に対応する距離だけ離れており、かつ、所定の幅(この実施例では10mとした)を備える。リンク両端のノード(交差点)5,6から5mの範囲を除外する。これは、リンク両端においては他のリンク(道路)上のプローブ情報の影響が出るおそれがあるためである。また、交差点内では右左折するプローブカーが道路の向きに沿っていないので、方位情報が不安定になる。後述のカウントステップから予め当該不安定なデータを除去しておくためである。
仮想領域2の座標情報(第1の座標情報)が第1の座標情報メモリ20としてRAM23に保存される。
【0031】
次に、ステップ5において中央制御装置21がプローブ情報読出装置13としてプローブ情報メモリ11からプローブ情報を読み出す。
このようにして読み出されたプローブ情報の座標情報は、プローブ情報抽出装置16によりステップ3においてRAM23に保存されている第1の座標情報と比較される。そして仮想領域2を示す第1の座標情報と等しい座標情報を有するプローブ情報のみが抽出される(ステップ7)。
【0032】
ステップ9では、中央制御装置21がカウンタ17としてステップ7で抽出されたプローブ情報の数をステップ1で指定された判定対象道路毎にカウントする。判定対象道路とそれに対応するプローブ情報の数はテーブル化されており、そのテーブルデータがハードディスク装置27の所定の領域に保存される。
ステップ11では、中央制御装置21がデータ数比較装置18として判定対象道路に対するプローブ情報のカウント数kに基づいて判定処理を行う。
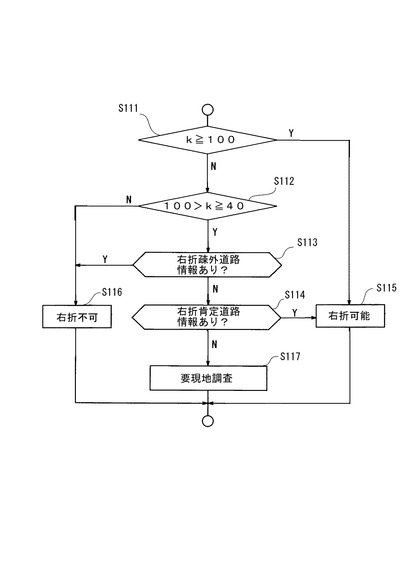
【0033】
図5に示すように、カウント数kが100以上であると(ステップ111)、対応する判定対象道路は右折可能と判定される(ステップ115)。カウント数が40未満のときは(ステップ112)、対応する判定対象道路は右折不能と判定される(ステップ116)。ここにおいて第1の閾値(=100個)及び第2の閾値(=40個)はそれぞれハードディスク装置27に保存されており、中央制御装置21に読み出されてステップ111及びステップ112の処理に使用される。
【0034】
カウント数が40以上100未満のときはステップ113に進む。ステップ113では、中央制御装置21が判定対象道路に付随する道路情報をハードディスク装置27から読み出し、そこに右折阻害道路情報があるときは、ステップ116へ進み、右折不能と判定する。右折阻害道路情報としては中央分離帯などがある。ステップ113において右折阻害道路情報がないときはステップ114へ進み、右折肯定道路情報の有無を検証する。右折肯定道路情報とは当該道路の道路途中での右折を積極的に容認する情報をさし、当該右折肯定道路情報が存在するときは、ステップ115に進んで右折可能と判定する。
【0035】
ステップ114において右折肯定道路情報の存在が確認できないときは、ステップ117へ進み、判定対象道路の右折可能性の判定は現地での調査が必要な旨を定義する。
これらステップ115、116、117の判定結果はステップ13において出力される。出力形態としてはディスプレイ45へ表示する及び/又はプリンタ38によりプリントすることが挙げられる。
なお、ステップ117の判定結果を出力する際には、判定対象道路に付随する道路情報を合わせて出力することが好ましい。当該判定対象道路の右折可能性をオペレータが判断するときの有効な情報となるからである。
【0036】
上記の例では右折を阻害する/肯定する道路情報の有無に基づいて右折の可能性を判定している。
その他、判定対象道路に付随する道路情報へ予め右折可能性信頼度を付与し、判定対象道路に付随する道路情報を読み出したときに各道路情報の当該右折可能性信頼度の平均値を演算し、演算結果を予め定められた閾値と比較することにより、判定対象道路の右折可能性を判定することもできる。
【0037】
なお、図1では道路途中で右折して反対車線側の駐車場へ駐車する場合を想定しているが、信号の無いT字交差点においても同様にして判定対象道路からの右折の可能性を判定することができる(図6参照)。
T字交差点の場合は、仮想領域2を道路4に沿って伸ばしてもよい。
このようにして得られた判定対象道路の右折可能性情報は、道路情報としてナビゲーション装置に用いられる。このナビゲーション装置では、運転者が指定した条件に従い目的地までのルートをルート演算部で演算する際に、メモリ装置に保存された判定対象道路の右折可能性情報が参照される。この右折可能性情報を参照することによりルート選択肢が増加し、運転者にとってより好適なルートを採用可能となる。
【0038】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0039】
【図1】図1はプローブ情報の抽出方法を説明する模式図である。
【図2】図2は実施例の右折可能道路判定装置の構成を示すブロック図である。
【図3】図3は実施例の右折可能道路判定装置を構成するコンピュータシステムを示す。
【図4】図4は実施例の右折可能道路判定装置の動作を示すフローチャートである。
【図5】図5は図4のステップ11の処理を示すフローチャートである。
【図6】図6はT字交差点におけるプローブ情報の抽出を説明する模式図である。
【符号の説明】
【0040】
1 リンク
2、3 仮想領域
4 道路
5,6 ノード
11 プローブ情報メモリ
12 右折可能道路判定装置
16 プローブ情報抽出装置
17 カウンタ
18 判定装置
20 座標情報メモリ
【技術分野】
【0001】
本発明は右折可能道路判定装置及びその方法に関する。更に詳しくは、この発明はナビゲーションシステム用等の道路地図のコンテンツとしての判定対象道路が右折可能であるか否かを判定するのに適した技術に関する。
【背景技術】
【0002】
従来、道路地図のコンテンツ(道路、交差点、信号機等々)の更新はフィールドワークにより行われていた。例えば、地域ごとに担当者が割り当てられ、担当者がその地区を巡回することにより、道路地図のコンテンツの内容(道路情報)を確認していた。ここに、コンテンツに付随する道路情報として、一方通行規制、進入禁止規制、交差点の信号機有無などを挙げることができる。これらの道路情報はナビゲーションシステムを稼動させるために利用される。
かかる道路情報を人手に頼って更新するには多大な時間とコストを費やす必要があった。
省力化のため。更新すべき対象を自動的に抽出する技術が特許文献1〜特許文献3に紹介されている。この技術では、プローブカーを用いて道路情報を収集している。
【特許文献1】特開2005−267470号公報
【特許文献2】特開2005−267471号公報
【特許文献3】特開2005−267472号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
走行中に反対車線側の店舗等の駐車場へ駐車するため、道路途中で右折することが車輌の実際の運行中にはしばしば行われる。しかしながら、ナビゲーションシステムで使用される道路地図には、道路情報として、道路途中における右折の可否に関する情報が含まれていなかった。
カーナビゲーションシステム用の道路地図がかかる情報を備えることになれば、目的地探索等において、利用者により便利なルートを提案可能となる。
そこでこの発明は、カーナビゲーション用の道路地図にかかる道路情報を付与できるよう、実際の道路における右折の可能性を、自動的に判定できる装置及びその方法を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は上記目的を達成するためにされた。
本発明の第1の局面は次のように規定することができる。即ち、
プローブ情報を保存するプローブ情報メモリと、
判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリと、
前記プローブ情報メモリから読み出したプローブ情報のうち前記第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置と、
該プローブ情報抽出装置が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタと、
該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置と、
を備えることを特徴とする右折可能道路判定装置。
【0005】
このように規定される第1の局面の右折可能道路判定装置によれば、プローブカーの走行履歴であるプローブ情報の中に右折した車輌が位置すると推定される第1の座標情報を有するものが多数(第1の閾値以上)存在するとき、当該判定対象道路において多数の車輌が右折したという事実が確認できたとして、当該判定対象道路は右折可能であると判定する。
【0006】
この発明の第2の局面は次のように規定できる。
即ち、第1の局面で規定される右折可能道路判定装置において、前記判定対象道路の道路情報を保存する道路情報メモリと、
前記カウンタによるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、前記道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定装置が更に備えられる。
このように規定される第2の局面の右折可能道路判定装置によれば、第1の座標情報を有するプローブ情報が第1の閾値に満たないまでも、第2の閾値を超える場合には、判定対象道路に付随する道路情報を参照し、判定対象道路が右折可能であるか否かを判定する。これにより、右折可能判定の精度が向上する。ここに、第2の判定装置が利用する道路情報としては、右折可能情報、右折可能性信頼度、道路種別などがある。そのうちの1又は2以上を任意に参照できる。
【0007】
右折可能情報としては、右折可能性を否定する右折阻害情報及び右折可能性を肯定する右折肯定情報がある。右折阻害情報としては中央分離帯の存在がある。右折肯定情報としてはこの発明を実行して得られた道路情報が利用できる。即ち、右折可能という所定の道路に右折可能という道路情報が付随していたとしても、当該道路の道路情報は折々に更新する必要があるからである。
【0008】
右折可能性信頼度は車線数、中央分離帯の有無等に基づき規定される。例えば片側複数車線の道路や中央分離帯のある道路では右折可能性信頼度が小さくなる。また、交差点からの距離が近いところでも右折可能性信頼度は小さくなる。道路種別では国道、都道府県道、市町村道の順に右折可能性信頼度は高くなる。当該右折可能性信頼度は道路情報ごとに付与され、判定対象道路に付随する道路情報において右折可能性信頼度の付与されたものの平均値を演算し、演算結果に従って右折の可能性を判定する。例えば、平均値が所定の閾値を超えたときに、右折可能と判定し、平均値が他の閾値未満のとき、右折不能と判定する。
【0009】
この発明の第3の局面は次のように規定される。即ち、
プローブ情報読み出し装置が、プローブ情報メモリからプローブ情報を読み出す読み出しステップと、
プローブ情報抽出装置が、第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出ステップと、
カウンタが、前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウントステップと、
第1の判定装置が、前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定ステップと、
を含むことを特徴とする右折可能道路判定方法。
このように規定される第3の局面の右折可能道路判定方法によれば、第1の局面の発明と同様にして、判定対象道路の右折可能性を自動的に判定できる。
【0010】
この発明の第4の局面は次のように規定できる。即ち、
第3の局面で規定した右折可能道路判定方法において、第2の判定装置が、前記カウンタステップにおけるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定ステップが、更に含まれる。
このように規定される第4の局面の右折可能道路判定方法によれば、第2の局面の発明と同様にして、右折可能性判断の精度が向上する。
【0011】
第3の局面及び第4の局面として規定される右折可能道路判定方法をコンピュータシステムに実行させるためのコンピュータプログラムが第5及び第6の局面として規定される。これら第5及び第6の局面で規定されるコンピュータプログラムを記録する記録媒体が第7の局面として規定される。
【発明を実施するための最良の形態】
【0012】
この発明において、プローブカーのプローブ情報には少なくともその座標情報(緯度及び経度)と当該座標にプローブカーが存在するときの方位情報とが含まれる。GPS等の位置検出機能を有する車両であればこれらの情報を特定することができる。また、例えば特開2002−150495号公報に記載されているように、車両のナビゲーションシステムと基地局との間で双方向の情報伝達を行うシステムは周知である。したがって、当該情報伝達システムを利用すればナビゲーションシステムを装備した一般車両をプローブカーとして使用することができる。勿論、道路情報を収集するための専用機器を搭載したプローブカーの使用を排除するものではない。
【0013】
プローブ情報として、上記座標情報と方位情報の他に、プローブカーの車両状況に関する情報を用いることもできる。プローブカーの車両状況に関する情報としてプローブカーの時間情報、ウインカーランプ、ハンドル、ブレーキ、ライト及び速度等に関する情報を挙げることができる。より具体的には、ウインカーランプ、ブレーキ、ライトについてはそれらのオン・オフが検出され、ハンドルについてはその回転角度が検出され、速度については速度計の数値が検出される。
更には車輌の発進及び停止の情報もプローブ情報として使用することができる。
【0014】
プローブ情報としてマップマッチング等により補正されたものを用いることもできる。これにより、プローブ情報に含まれる誤差を減少することができる。
ここに、マップマッチングとは、カーナビゲーションシステムにおいてプローブカーの位置を地図情報の道路上から外れないようにする技術であり、これにより、プローブカーの位置が常に道路上に存在することとなる。マップマッチングを行うためにはカーナビゲーションシステムにおいてプローブカーの座標情報、方位情報、移動距離などから走行軌跡が形成され、この走行軌跡が地図情報にある道路形状データに照らしあわされる。道路形状データは複数存在するので、所定の優先度に従って重み付けを行い、一つの道路を選択する。そして、プローブカーの座標を当該道路上の座標へと変更する。
以上詳細はカーナビゲーションシステム(公開型データ構造KIWIとその利用方法)、第4章、共立出版、等を参照されたい。
また、このマップマッチングはプローブカーからプローブ情報を受け取った基地局側で行ってもよい。
【0015】
この発明では、右折可能であるか否かの判定対象となる道路に関連するプローブ情報をその座標情報に基づき抽出する。
判定対象道路から右折した車輌が位置すると推定される第1の座標と同じ座標を含むプローブ情報を抽出する。当該座標を含むプローブ情報は判定対象道路上において実際に右折したプローブカーの生成したものである。本発明者らの検討によれば、プローブ情報においてその座標情報には多少の誤差が含まれるので、他の道路からの影響を排除するために道路において両端(交差点等)から所定の距離(第1の距離)内にあるものはキャンセルすることが好ましい。また、交差点内では右左折するプローブカーの向きが道路に沿っておらず、方位情報が不安定になるおそれがある。後述するように判定対象道路が右折可能であるか否かの判定が第1の座標を有するプローブ情報の数に基づいて行われる。従って、予め不安定なプローブ情報は除去しておくことが好ましい。
第1の距離は、交差点の形状(交差する道路の幅、交差数、交差する道路の角度)などから適宜設定できる。
【0016】
判定対象道路がリンクとして表現されている場合は、図1に示すように、当該リンク1を中心とした所定幅(第1の幅)の外側に仮想領域2及び仮想領域3を設定する。そして当該仮想領域2,3内の座標と一致する座標情報を含むプローブ情報I4が抽出する。このプローブ情報I4は直前の数個のプローブ情報I1〜I3がリンク1より上側に存在していることが前提である。即ち、一連のプローブ情報から仮想領域2内に存在するプローブ情報が右折した車輌の位置を表すものであることが確認されなければならない。それ以前のプローブ情報がリンク1より下側の車線に存在していたものは、たとえそのプローブ情報が仮想領域2に存在したとしても、有効なプローブ情報として抽出されることはない。
上記において、リンク1と各仮想領域2、3との距離は判定対象道路の道路幅と一致させることができる。
【0017】
以下、説明の都合上、図示された道路において上側半分(図1ではリンク1より上側部分)の車線を走行したプローブカーにより得られたプローブ情報I1〜I3のみに着目する。図1に従えば、上側の車線より右折した車輌は仮想領域2に少なくとも一旦は位置することとなる。勿論、図1において下側の車線より右折した車輌は仮想領域3に少なくとも一旦は位置することになるが、その説明については省略する。
【0018】
かかる仮想領域2を設定した場合においてもリンク1の両端(即ちノード)5、6から第1の距離(例えば5m)以内にあるものはキャンセルすることが好ましい。
この仮想領域2の座標を示す座標情報が第1の座標情報となる。
プローブ情報I1〜I4は、座標情報、時間情報を少なくとも含む。その他、ウインカー情報やハンドル角情報等を含むこともできる。
【0019】
仮想領域2に存在するプローブ情報の数を判定対象道路毎にカウントし、そのカウント数に基づいて判定対象道路が右折可能か否かを判定する。
例えば、充分数(第1の閾値以上:例えば100以上)のプローブ情報が仮想領域2内に存在すれば、多くのプローブカーが実際に当該判定対象道路で右折したこととなる。従って、当該判定対象道路は右折可能であると判定することが妥当である。
仮想領域2におけるプローブ情報の数がゼロの判定対象道路については、右折不可能と判断すべきであり、またプローブ情報の数が数個の場合においても、誤差の危険性を考慮して、右折可能と判断することはできない。
他方、第1の閾値数には満たないが相当数(第2の閾値数:例えば数十個)以上のプローブ情報が仮想領域2内に存在するときは、当該判定対象道路における右折の可能性を判定するにあたり、判定対象道路のリンク1に付随する道路情報を参照する。例えば、道路幅が広いとき(片側複数車線を示す)は、対向車が多いので右折困難であり、右折の可能性を否定する情報となる。
【実施例】
【0020】
以下、この発明の実施例について説明をする。
図2はこの発明の右折可能道路判定装置の機能ブロック図を示す。
プローブカーP1、P2 … Pmはそのコンピュータがインターネット等のネットワークNへ無線で連結されている。プローブカーは所定のインターバルでプローブ情報を発信する。このプローブ情報には当該プローブカーの現在の座標情報(X,Y)、方位情報(D)、時間(T)及びその他の情報が含まれる。このプローブ情報はネットワークNを介して中央制御装置10へ伝達され、そのプローブ情報メモリ11へ格納される。
プローブ情報を伝達する方法は上記ネットワークを介する方法に限定されず、プローブカー内のメモリへ一旦格納し、当該メモリから直接又は有線を介してプローブ情報メモリ11へプローブ情報を供給することもできる。
【0021】
右折可能道路判定装置12は、判定対象となる道路を特定するために判定対象道路座標付与装置14を備える。当該装置14においてオペレータが特定の道路を指定すると、当該道路のリンク1がメモリ15から読出され、図1に示すように、リンク1を中心として仮想領域2が自動的に指定される。なお、ノード5、6から5mの範囲においては領域指定から外される。これは、プローブ情報に含まれる誤差をキャンセルするためである。仮想領域2の座標(第1の座標情報)が特定され、第1の座標情報メモリ20に保存される。
プローブ情報メモリ11に格納されているプローブ情報がプローブ情報読出装置13により読み出され、さらに第1の座標情報メモリ20から第1の座標情報が読み出されて、プローブ情報抽出装置16において各プローブ情報における座標情報と第1の座標情報(仮想領域2の座標情報)とが比較される。
【0022】
プローブ情報抽出装置16において第1の座標情報と一致した座標情報を有するプローブ情報は判定対象道路毎にカウンタ17へ送られる。このカウンタ17はプローブ情報抽出装置16より送られてくるプローブ情報の数をカウントする。このプローブ情報の数は図1において仮想領域2内に有効に存在するプローブ情報の数を指している。
【0023】
カウント数と所定の閾値とがデータ数比較装置18で比較される。即ち、カウント数が第1の閾値以上のときは右折可能と判定する。判定結果は出力装置19により外部出力される。
【0024】
図3は右折可能道路判定装置12のハード構成を示すブロック図である。
この装置12のハード構成は、一般的なコンピュータシステムと同様に中央制御装置21に対してシステムバス22を介して各種の要素が結合されたものである。
中央制御装置21は汎用的なCPU、メモリ制御装置、バス制御装置、割り込み制御装置更にはDMA(直接メモリアクセス)装置を含み、システムバス22もデータライン、アドレスライン、制御ラインを含む。システムバス22にはRAM(ランダムアクセスメモリ)23、不揮発メモリ(ROM24,CMOS−RAM25等)からなるメモリ回路が接続されている。RAM23には中央制御装置21や他のハードウエア要素によって読み取られたり、書き換えられたりする。不揮発メモリのデータは読み取り専用であり、装置をオフとしたときにもそこのデータは喪失されない。このハードウエアを制御するシステムプログラムはハードディスク装置27に保存されており、また、RAM23に保存されており、ディスクドライブ制御装置26を介して適宜中央制御装置21に読みこまれて使用される。このハードディスク装置27には、汎用的な構成のコンピュータシステムを右折可能道路判定装置12として動作させるためのコンピュータプログラムが保存する領域が確保される。
このハードディスク装置27の所定の領域に地図情報及び道路情報が保存されている。地図情報は道路を指定するためのノードとリンク含み、道路情報は道路種別、制限速度、路幅、中央分離帯の有無、各種規制情報(一方通行規制等)を含んでいる。
ハードディスク装置27の他の領域にプローブ情報が保存されている。
【0025】
システムバス22には、フレキシブルディスク32に対してデータの読み込み及び書き込みを行うフレキシブルドライブ制御装置31、コンパクトディスク34に対してそれからデータの読み取りを行うCD/DVD制御装置33が接続されている。この実施例ではプリンタインターフェース37にプリンタ38を接続させている。
【0026】
システムバス22にはキーボード・マウス制御装置41が接続され、キーボード42及びマウス43からのデータ入力を可能としている。モニタ45がモニタ制御装置44を介してシステムバス22に接続されている。モニタ45にはCRTタイプ、液晶タイプ、プラズマディスプレイタイプなどを利用することができる。
各種の要素(モデムなど)の増設を可能とするため空きのスロット51が準備されている。
【0027】
実施例のシステムはネットワークアダプタ61を介して、ネットワークNに接続される。このネットワーク(インターネット)Nにはプローブカーが連結されている。
【0028】
このコンピュータシステムからなる右折可能道路判定装置12を稼動させるために必要なプログラム(OSプログラム、アプリケーションプログラム(本発明のものも含む))は、各種の記録媒体を介してシステムの中にインストールされる。例えば非書き込み記録媒体(CD−ROM、ROMカード等)、書き込み可能記録媒体(FD、DVD等)、更にはネットワークNを利用して通信媒体の形式でインストールすることも可能である。勿論、不揮発メモリ24、25やハードディスク装置27に予めこれらのプログラムを書きこんでおくこともできる。
【0029】
このようなコンピュータシステムによれば、プローブカーからのプローブ情報は全てネットワークアダプタ61を介してシステム内に取り込まれ、一旦ハードディスク27の所定のフォルダに保存される。次に、ハードディスク27に保存された全プローブ情報から所定のプローブ情報を抽出する。抽出されたプローブ情報は一旦RAM23に保存される。
次に、中央制御装置21はハードディスク27に保存されていた所定のプログラムに従い、RAM23のプローブ情報に基づき判定対象道路の右折可能性を判定する。
【0030】
以下、実施例の右折可能道路判定装置12の動作を説明する(図4のフローチャート参照)。
ステップ1においては、右折可能性の判定対象となる道路のリンクを道路地図上において指定する。より具体的には、ハードディスク装置27に保存されている道路地図に基づき、ディスプレイ45に地図を表示させ、地図上において判定対象となる道路をグラフィックインターフェースにより指定する。判定対象道路が指定されると、中央制御装置21は、図1に示すように、ハードディスク装置27から対応するリンク1とノード5、6を指定する。
次にステップ3において、図1に示すとおり、中央演算装置21は判定対象道路座標付与装置14として、仮想領域2を特定する。この仮想領域2はリンク1から片側の道路幅に対応する距離だけ離れており、かつ、所定の幅(この実施例では10mとした)を備える。リンク両端のノード(交差点)5,6から5mの範囲を除外する。これは、リンク両端においては他のリンク(道路)上のプローブ情報の影響が出るおそれがあるためである。また、交差点内では右左折するプローブカーが道路の向きに沿っていないので、方位情報が不安定になる。後述のカウントステップから予め当該不安定なデータを除去しておくためである。
仮想領域2の座標情報(第1の座標情報)が第1の座標情報メモリ20としてRAM23に保存される。
【0031】
次に、ステップ5において中央制御装置21がプローブ情報読出装置13としてプローブ情報メモリ11からプローブ情報を読み出す。
このようにして読み出されたプローブ情報の座標情報は、プローブ情報抽出装置16によりステップ3においてRAM23に保存されている第1の座標情報と比較される。そして仮想領域2を示す第1の座標情報と等しい座標情報を有するプローブ情報のみが抽出される(ステップ7)。
【0032】
ステップ9では、中央制御装置21がカウンタ17としてステップ7で抽出されたプローブ情報の数をステップ1で指定された判定対象道路毎にカウントする。判定対象道路とそれに対応するプローブ情報の数はテーブル化されており、そのテーブルデータがハードディスク装置27の所定の領域に保存される。
ステップ11では、中央制御装置21がデータ数比較装置18として判定対象道路に対するプローブ情報のカウント数kに基づいて判定処理を行う。
【0033】
図5に示すように、カウント数kが100以上であると(ステップ111)、対応する判定対象道路は右折可能と判定される(ステップ115)。カウント数が40未満のときは(ステップ112)、対応する判定対象道路は右折不能と判定される(ステップ116)。ここにおいて第1の閾値(=100個)及び第2の閾値(=40個)はそれぞれハードディスク装置27に保存されており、中央制御装置21に読み出されてステップ111及びステップ112の処理に使用される。
【0034】
カウント数が40以上100未満のときはステップ113に進む。ステップ113では、中央制御装置21が判定対象道路に付随する道路情報をハードディスク装置27から読み出し、そこに右折阻害道路情報があるときは、ステップ116へ進み、右折不能と判定する。右折阻害道路情報としては中央分離帯などがある。ステップ113において右折阻害道路情報がないときはステップ114へ進み、右折肯定道路情報の有無を検証する。右折肯定道路情報とは当該道路の道路途中での右折を積極的に容認する情報をさし、当該右折肯定道路情報が存在するときは、ステップ115に進んで右折可能と判定する。
【0035】
ステップ114において右折肯定道路情報の存在が確認できないときは、ステップ117へ進み、判定対象道路の右折可能性の判定は現地での調査が必要な旨を定義する。
これらステップ115、116、117の判定結果はステップ13において出力される。出力形態としてはディスプレイ45へ表示する及び/又はプリンタ38によりプリントすることが挙げられる。
なお、ステップ117の判定結果を出力する際には、判定対象道路に付随する道路情報を合わせて出力することが好ましい。当該判定対象道路の右折可能性をオペレータが判断するときの有効な情報となるからである。
【0036】
上記の例では右折を阻害する/肯定する道路情報の有無に基づいて右折の可能性を判定している。
その他、判定対象道路に付随する道路情報へ予め右折可能性信頼度を付与し、判定対象道路に付随する道路情報を読み出したときに各道路情報の当該右折可能性信頼度の平均値を演算し、演算結果を予め定められた閾値と比較することにより、判定対象道路の右折可能性を判定することもできる。
【0037】
なお、図1では道路途中で右折して反対車線側の駐車場へ駐車する場合を想定しているが、信号の無いT字交差点においても同様にして判定対象道路からの右折の可能性を判定することができる(図6参照)。
T字交差点の場合は、仮想領域2を道路4に沿って伸ばしてもよい。
このようにして得られた判定対象道路の右折可能性情報は、道路情報としてナビゲーション装置に用いられる。このナビゲーション装置では、運転者が指定した条件に従い目的地までのルートをルート演算部で演算する際に、メモリ装置に保存された判定対象道路の右折可能性情報が参照される。この右折可能性情報を参照することによりルート選択肢が増加し、運転者にとってより好適なルートを採用可能となる。
【0038】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0039】
【図1】図1はプローブ情報の抽出方法を説明する模式図である。
【図2】図2は実施例の右折可能道路判定装置の構成を示すブロック図である。
【図3】図3は実施例の右折可能道路判定装置を構成するコンピュータシステムを示す。
【図4】図4は実施例の右折可能道路判定装置の動作を示すフローチャートである。
【図5】図5は図4のステップ11の処理を示すフローチャートである。
【図6】図6はT字交差点におけるプローブ情報の抽出を説明する模式図である。
【符号の説明】
【0040】
1 リンク
2、3 仮想領域
4 道路
5,6 ノード
11 プローブ情報メモリ
12 右折可能道路判定装置
16 プローブ情報抽出装置
17 カウンタ
18 判定装置
20 座標情報メモリ
【特許請求の範囲】
【請求項1】
プローブ情報を保存するプローブ情報メモリと、
判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリと、
前記プローブ情報メモリから読み出したプローブ情報のうち前記第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置と、
該プローブ情報抽出装置が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタと、
該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置と、
を備えることを特徴とする右折可能道路判定装置。
【請求項2】
前記判定対象道路の道路情報を保存する道路情報メモリと、
前記カウンタによるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、前記道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定装置が更に備えられる、ことを特徴とする請求項1に記載の右折可能道路判定装置。
【請求項3】
プローブ情報読み出し装置が、プローブ情報メモリからプローブ情報を読み出す読み出しステップと、
プローブ情報抽出装置が、第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出ステップと、
カウンタが、前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウントステップと、
第1の判定装置が、前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定ステップと、
を含むことを特徴とする右折可能道路判定方法。
【請求項4】
第2の判定装置が、前記カウンタステップにおけるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定ステップを、更に含むことを特徴とする右折可能道路判定方法。
【請求項5】
判定対象道路が右折可能か否かを判定するためのコンピュータプログラムであって、コンピュータを、
プローブ情報メモリからプローブ情報を読み出す読み出し手段と、
第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出手段と、
前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウント手段と、
前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定手段と、
として機能させる、ことを特徴とするコンピュータプログラム。
【請求項6】
前記コンピュータを、更に、
前記カウンタ手段がカウントしたカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定手段として機能させる、ことを特徴とする請求項5に記載のコンピュータプログラム。
【請求項7】
請求項5又は6に記載のコンピュータプログラムを記録する記録媒体。
【請求項8】
請求項3又は4に記載の前記判定対象道路の右折可能性につき判定した判定結果を保存するメモリ装置と、
ルートを選択する際に、前記メモリ装置に保存されている前記判定結果を参照するルート演算部と、
を備えることを特徴とする、ナビゲーション装置。
【請求項1】
プローブ情報を保存するプローブ情報メモリと、
判定対象道路から右折した車輌が位置すると推定される第1の座標情報を保存する第1の座標情報メモリと、
前記プローブ情報メモリから読み出したプローブ情報のうち前記第1の座標情報と等しい座標情報を有するものを抽出するプローブ情報抽出装置と、
該プローブ情報抽出装置が抽出したプローブ情報の数を前記判定対象道路毎にカウントするカウンタと、
該カウンタによるカウント数が第1の閾値以上の判定対象道路につき右折可能と判定する第1の判定装置と、
を備えることを特徴とする右折可能道路判定装置。
【請求項2】
前記判定対象道路の道路情報を保存する道路情報メモリと、
前記カウンタによるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、前記道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定装置が更に備えられる、ことを特徴とする請求項1に記載の右折可能道路判定装置。
【請求項3】
プローブ情報読み出し装置が、プローブ情報メモリからプローブ情報を読み出す読み出しステップと、
プローブ情報抽出装置が、第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出ステップと、
カウンタが、前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウントステップと、
第1の判定装置が、前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定ステップと、
を含むことを特徴とする右折可能道路判定方法。
【請求項4】
第2の判定装置が、前記カウンタステップにおけるカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定ステップを、更に含むことを特徴とする右折可能道路判定方法。
【請求項5】
判定対象道路が右折可能か否かを判定するためのコンピュータプログラムであって、コンピュータを、
プローブ情報メモリからプローブ情報を読み出す読み出し手段と、
第1の座標情報メモリに保存されている判定対象道路から右折した車輌が位置すると推定される第1の座標情報を参照して、前記読み出しステップで読み出されたプローブ情報のうちから該第1の座標情報と等しい座標情報を有するプローブ情報を抽出する抽出手段と、
前記抽出ステップで抽出されたプローブ情報の数を前記判定対象道路毎にカウントするカウント手段と、
前記カウントステップでカウントされたカウント数が第1の閾値以上の前記判定対象道路につき右折可能と判定する第1の判定手段と、
として機能させる、ことを特徴とするコンピュータプログラム。
【請求項6】
前記コンピュータを、更に、
前記カウンタ手段がカウントしたカウント数が前記第1の閾値未満でありかつ第2の閾値以上である判定対象道路につき、道路情報メモリに保存されている道路情報を参照し、該判定対象道路の右折可能性を判定する第2の判定手段として機能させる、ことを特徴とする請求項5に記載のコンピュータプログラム。
【請求項7】
請求項5又は6に記載のコンピュータプログラムを記録する記録媒体。
【請求項8】
請求項3又は4に記載の前記判定対象道路の右折可能性につき判定した判定結果を保存するメモリ装置と、
ルートを選択する際に、前記メモリ装置に保存されている前記判定結果を参照するルート演算部と、
を備えることを特徴とする、ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−60321(P2010−60321A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−223707(P2008−223707)
【出願日】平成20年9月1日(2008.9.1)
【出願人】(501271479)株式会社トヨタマップマスター (56)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月1日(2008.9.1)
【出願人】(501271479)株式会社トヨタマップマスター (56)
【Fターム(参考)】
[ Back to top ]