
合成開口レーダ装置
【課題】飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる合成開口レーダ装置を提供する。
【解決手段】 飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部1〜8と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部9と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部10を備えている。
【解決手段】 飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部1〜8と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部9と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部10を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、合成開口レーダ(SAR;Synthetic Aperture Radar)装置に関し、特に3次元空間に存在する目標を検出対象とするエンドファイア(飛翔経路)型の合成開口レーダ装置に関する。
【背景技術】
【0002】
従来、移動しながら電波を対象物に照射し、その反射波を解析することにより、対象物の起伏や構造を明らかにする合成開口レーダ装置(以下、「SAR装置」と略する場合もある)が知られている。
【0003】
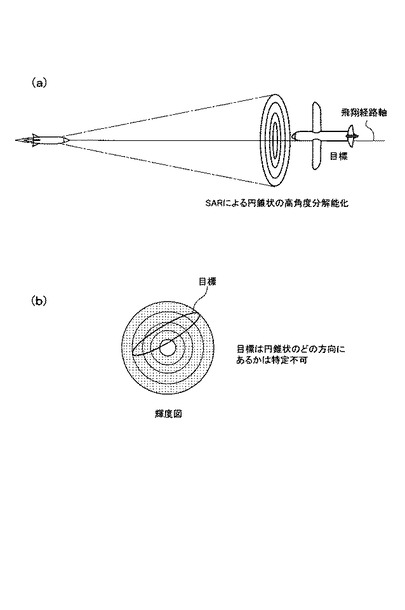
このSAR装置は、一般に、飛翔経路の側方の地上に存在する目標(2次元目標)を観測するために使用される。このSAR装置を用いて、空中の飛翔経路方向に存在する目標、つまり3次元空間の目標を観測すると、SAR装置がリニアアレイセンサを基本としているために、図9(a)に示すような円錐状のビームが形成される。
【0004】
したがって、図9(b)の輝度図に示すように、例えば破線で囲った領域に目標が存在するものとすると、径方向全体に高輝度の画像が得られるので、円錐の中のどの方向に目標が存在するかを区別できない。
【非特許文献1】大内、“リモートセンシングのための合成開口レーダの基礎”、東京電機大学出版局(2003) pp.176-178
【非特許文献2】大内、“リモートセンシングのための合成開口レーダの基礎”、東京電機大学出版局(2003) pp.210-217
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述したように、従来のSAR装置では、3次元空間の目標を観測すると、目標が存在する位置を区別できない画像が得られるので、目標の中心を特定できず、追尾等を実施することができないという問題がある。
【0006】
本発明は、上述した問題を解消するためになされたものであり、その課題は、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる合成開口レーダ装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、第1の発明は、飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部とを備えたことを特徴とする。
【0008】
また、第2の発明は、飛翔経路中心設定部は、複数通りの飛翔経路中心を設定し、該設定した複数の飛翔経路中心の各々に対して合成開口レーダ処理部から得られた画像の強度の変化よって目標の形状を認識し、誘導制御部は、飛翔経路中心設定部で認識された目標の形状の任意の点に飛翔体を誘導することを特徴とする。
【発明の効果】
【0009】
第1の発明によれば、合成開口レーダ処理部によって合成開口長を十分とり、飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標の画像を生成し、円錐状のどこに目標が存在しても、画像の径方向の大きさが最小になる場合の飛翔経路中心が、目標の中心に一致することを利用して、目標の中心方向に飛翔体を誘導するので、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる。
【0010】
また、第2の発明によれば、複数通りの飛翔経路中心を設定し、設定した複数の飛翔経路中心の各々に対応する画像の強度の変化よって目標の形状を認識し、認識された目標の形状の任意の点に飛翔体を誘導するように構成したので、目標の中心のみならず、任意の点を追尾することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。
【実施例1】
【0012】
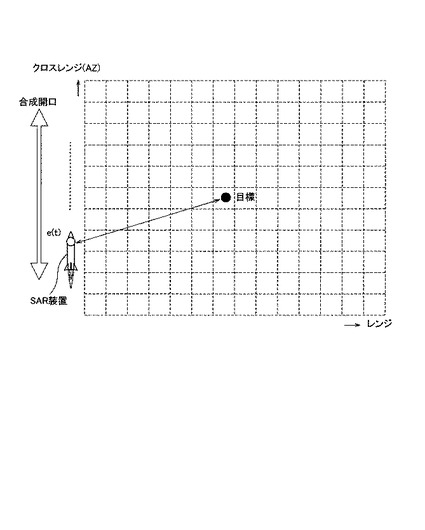
まず、SARの原理について説明する。図1は、SARのモデルを示す。このモデルは、一般的なモデルとして、側方監視を行う場合の例を示しており、飛翔体に搭載されたSAR装置で電波を送受信して合成開口レーダ処理(以下、「SAR処理」という)を行うことにより目標を探知する状態を示している。
【0013】
今、送受信信号をe(t)とし、AZ(クロスレンジ)圧縮用の参照信号をr(t)とすると、AZ圧縮後の信号s(t)は、次式で算出できる(非特許文献1参照)。
【数1】

【0014】
ここで、
e(t) ;送受信信号
E(f) ;e(t)のフーリエ変換
r(t) ;参照信号
R(f) ;r(t)のフーリエ変換
s(t) ;SAR画像
S(f) ;s(t)のフーリエ変換
FFT[ ] ;フーリエ変換
FFT-1[ ];逆フーリエ変換
* ;複素共役
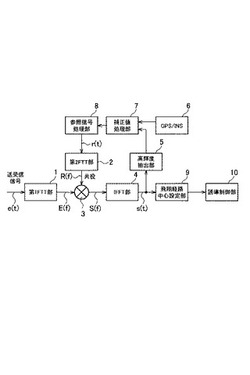
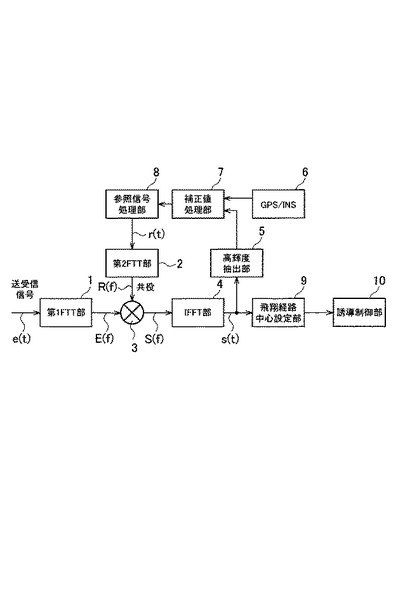
SAR処理では、目標の飛翔経路や機体動揺が存在する場合は、参照信号の補正が必要である。図2は、この参照信号の補正を行うように構成された、本発明の実施例1に係るSAR装置の機能的な構成を示すブロック図である。参照信号の補正方法としては、GPS/INS(全地球測位システム;Global Positioning System/慣性航法システム;Inertial Navigation System)を用いた補正と、オートフォーカスによる補正(非特許文献2参照)とが用いられる。
【0015】
SAR装置は、第1FFT部1、第2FFT部2、乗算部3、IFFT部4、高輝度抽出部5、GPS/INS部6、補正値処理部7、参照信号処理部8、飛翔経路中心設定部9および誘導制御部10を備えている。本発明の合成開口レーダ処理部は、第1FFT部1、第2FFT部2、乗算部3、IFFT部4、高輝度抽出部5、GPS/INS部6、補正値処理部7および参照信号処理部8から構成されている。
【0016】
第1FFT部1は、式(1)にしたがって、図示しない受信機から入力される送受信信号e(t)をフーリエ変換し、信号E(f)として乗算部3に送る。第2FFT部2は、式(2)にしたがって、参照信号処理部8から送られてくる参照信号r(t)をフーリエ変換し、信号R(f)として乗算部3に送る。
【0017】
乗算部3は、式(3)にしたがって、第1FFT部1から送られてくる信号E(f)と第2FFT部2から送られてくる信号R(f)を乗算し、信号S(f)としてIFFT部4に送る。IFFT部4は、式(4)にしたがって、乗算部3から送られてくる信号S(f)を逆フーリエ変換する。このIFFT部4で逆フーリエ変換することにより得られた信号s(t)は、SAR画像として、高輝度抽出部5および飛翔経路中心設定部9に送られる。なお、このSAR画像は、本発明の「画像」に対応する。
【0018】
高輝度抽出部5は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像から高輝度部分を抽出する。この高輝度抽出部5で抽出された高輝度部分を表す信号は、補正値処理部7に送られる。GPS/INS部6は、GPS衛星航法と慣性航法システムとを組み合わせ、連続的に高精度な位置、速度、姿勢情報等を生成する。このGPS/INS部6で生成された情報は、補正値処理部に送られる。
【0019】
補正値処理部7は、高輝度抽出部5から送られてくる高輝度部分を表す信号、および、GPS/INS部6から送られてくる情報に基づき参照信号を補正するための補正値を生成し、参照信号処理部8に送る。この補正値処理部7で生成された補正値に基づき参照信号が補正されることにより、振幅が大きくシャープな補正後のSAR画像が得られる。参照信号処理部8は、補正値処理部7から送られてくる補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0020】
飛翔経路中心設定部9は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像に含まれる目標が最小になるよう飛翔経路中心を設定する。この飛翔経路中心設定部9で設定された飛翔経路中心は、誘導制御部10に送られる。誘導制御部10は、飛翔経路中心設定部9で設定された飛翔経路中心に向くように飛翔体を誘導する。
【0021】
次に、本発明の実施例1に係る合成開口レーダ装置の動作を説明する。ここでは、図9に示すような、エンドファイア(飛翔経路)方向を中心としたSAR処理を行う場合について説明する。
【0022】
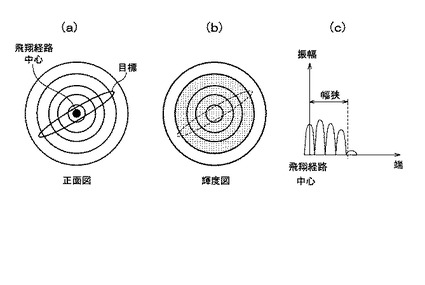
エンドファイア方向においては、飛翔経路軸を中心として、その周りに、円錐状に高分解能のビームを形成できる。このビームで目標を観測する際には、図3と図4とに比較して示すように、目標の中心と飛翔経路中心の一致度により、円錐状のビームで観測されるSAR画像の大きさ(径方向の広がり)が異なり、飛翔経路中心と目標の中心が一致した場合に、SAR画像が最も小さくなる。
【0023】
例えば、図3(a)に破線で囲って示すように、飛翔経路中心からずれた位置に目標が存在する場合は、図3(b)の輝度図に示すように、中心部が低輝度で、その周囲が全体的に高輝度のSAR画像が得られる。この場合、図3(c)の強度分布図に示すように、SAR画像の径方向の広がりが大きく(幅広に)なる。
【0024】
一方、図4(a)に破線で囲って示すように、飛翔経路中心の近傍に目標が存在する場合は、図4(b)の輝度図に示すように、中心部およびその周囲が全体的に高輝度で、外周部が低輝度のSAR画像が得られる。この場合、図4(c)の強度分布図に示すように、SAR画像の径方向の広がりは小さく(幅狭に)なる。したがって、飛翔経路中心を変更することによって、SAR画像の大きさが最も小さくなる点を見つければ、目標の中心を決定することができる。
【0025】
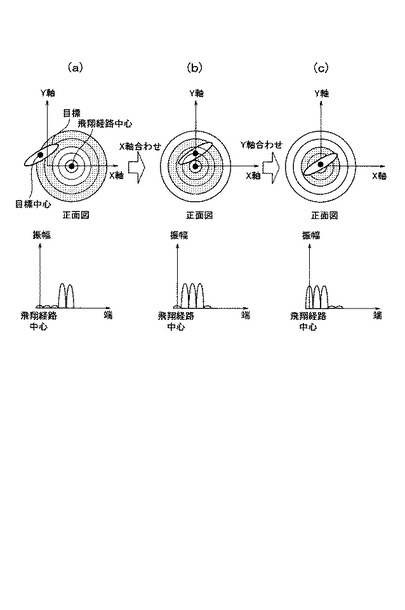
図5は、飛翔経路中心設定部9において行われる飛翔経路中心を変更する方法を説明するための図である。IFFT部4から得られるSAR画像を、図5(a)に示すように、X軸とY軸が直交する2次元空間に割り当てる。この時点では、目標の中心は飛翔経路中心から離れた位置に存在する。
【0026】
この状態で、図5(b)に示すように、飛翔経路中心をX軸の方向に動かして、SAR画像が最も小さくなる位置を探してX軸方向の位置を決定する。その後、図5(c)に示すように、飛翔経路中心をY軸の方向に動かして、SAR画像が最も小さくなる位置を探してY軸方向の位置を決定する。このようにして決定されたX軸およびY軸方向のSAR画像が最も小さくなる点が目標の中心として決定され、その目標の中心が飛翔経路中心として設定される。
【0027】
なお、上述した飛翔経路中心を変更する方法では、まず、飛翔経路中心をX軸方向に動かした後にY軸方向に動かすように構成したが、先にY軸方向の動かした後に、X軸方向に動かすように構成することもできる。
【0028】
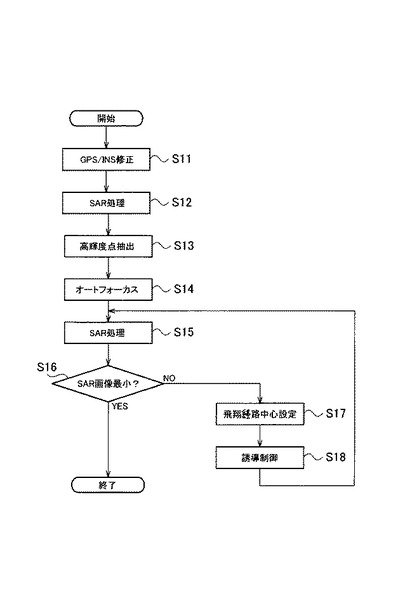
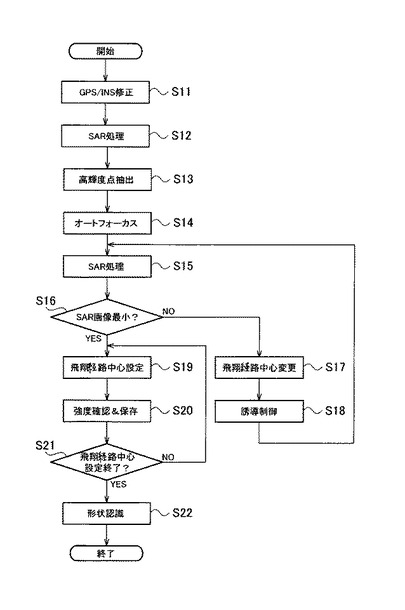
次に、本発明の実施例1に係る合成開口レーダ装置の動作を、飛翔体の誘導処理を中心に、図6に示すフローチャートを参照しながら説明する。
【0029】
飛翔体の誘導処理では、まず、GPS/INS補正処理が行われる(ステップS11)。すなわち、GPS/INS部6は、連続的に高精度な位置、速度、姿勢情報等を生成して補正値処理部7に送る。補正値処理部7は、GPS/INS部6から送られてきた情報に基づき参照信号を補正するための補正値を生成し、参照信号処理部8に送る。参照信号処理部8は、補正値処理部7から送られてくる補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0030】
次いで、SAR処理が行われる(ステップS12)。すなわち、第1FFT部1は、図示しない受信機から入力される送受信信号e(t)をフーリエ変換し、信号E(f)として乗算部3に送る。また、第2FFT部2は、参照信号処理部8から送られてくる参照信号r(t)をフーリエ変換し、信号R(f)として乗算部3に送る。乗算部3は、第1FFT部1から送られてくる信号E(f)と第2FFT部2から送られてくる信号R(f)を乗算し、信号S(f)としてIFFT部4に送る。IFFT部4は、乗算部3から送られてくる信号S(f)を逆フーリエ変換して信号s(t)を生成し、SAR画像として、高輝度抽出部5および飛翔経路中心設定部9に送る。
【0031】
次いで、高輝度点抽出処理が行われる(ステップS13)。すなわち、高輝度抽出部5は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像の高輝度部分を抽出し、補正値処理部7に送る。
【0032】
次いで、オートフォーカス処理が行われる(ステップS14)。補正値処理部7は、例えば、高輝度抽出部5から送られてくる画像からピーク値(極大値)を抽出し、この抽出したピーク値の回りのクロスレンジ方向の所定範囲のMセルの信号をフーリエ変換し、このフーリエ変換により得られた信号を用いて参照信号を補正するための補正値を生成して参照信号処理部8に送る。参照信号処理部8は、補正値処理部7から送られてきた補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0033】
次いで、SAR処理が行われる(ステップS15)。すなわち、このステップS14においては、上述したステップS12における処理と同様にして、SAR画像が生成され、高輝度抽出部5および飛翔経路中心設定部9に送られる。
【0034】
次いで、SAR画像が最小であるかどうかが調べられる(ステップS16)。すなわち、飛翔経路中心設定部9は、図5を参照して説明した手順で、IFFT部4から送られてくる信号s(t)によって示されるSAR画像に含まれる目標が最小であるかどうかを調べる。このステップS16において、SAR画像が最小でないことが判断されると、次いで、飛翔経路中心設定処理が行われる(ステップS17)。すなわち、飛翔経路中心設定部9は、図5を参照して説明した手順で、飛翔経路中心を変更して誘導制御部10に送る。
【0035】
次いで、誘導制御処理が行われる(ステップS18)。すなわち、誘導制御部10は、飛翔経路中心設定部9から送られてくる飛翔経路中心に向くように飛翔体を誘導する。その後、ステップS15に戻り、SAR画像に含まれる目標が最小になるまで、上述した処理が繰り返される。そして、ステップS16において、SAR画像が最小でないことが判断されると、飛翔体の誘導処理は終了する。
【0036】
以上説明したように、本発明の実施例1に係る合成開口レーダ装置によれば、合成開口レーダ処理によって合成開口長を十分とり、飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標の画像を生成し、円錐状のどこに目標が存在しても、画像の径方向の大きさが最小になる場合の飛翔経路中心が、目標の中心に一致することを利用して、目標の中心方向に飛翔体を誘導するように構成したので、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる。
【実施例2】
【0037】
本発明の実施例2に係る合成開口レーダ装置は、実施例1で説明した方法を用いて目標の形状(広がり)を認識するようにしたものである。この実施例2に係る合成開口レーダ装置の構成は、飛翔経路中心設定部9の機能を除き、図2に示した実施例1に係る合成開口レーダ装置の構成と同じである。
【0038】
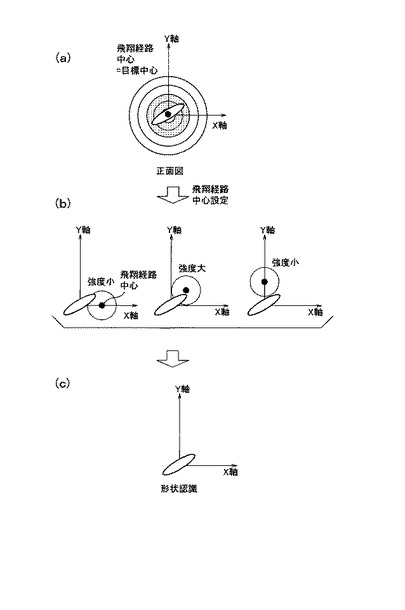
飛翔経路中心設定部9は、実施例1で説明した目標の中心を決定する機能に加え、決定した目標の中心の周りに飛翔経路中心を移動させて、目標の振幅の変化を観測することにより、目標の形状(広がり)を認識する。
【0039】
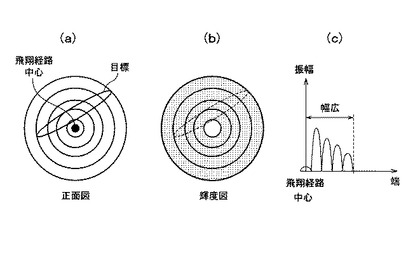
図7は、飛翔経路中心設定部9において行われる目標の形状を認識する原理を説明するための図である。飛翔経路中心設定部9は、図7(a)に示すような飛翔経路中心が目標の中心に一致している状態から、図7(b)に示すように、飛翔経路中心を他の複数の位置に設定し、SAR画像の強度を収集する。この場合、目標が飛翔経路中心から所定範囲内に存在すれば強度が大になり、そうでなければ強度は小になる。したがって、複数の飛翔経路中心の強度をプロットすることにより、図7(c)に示すような目標の形状を認識することができる。
【0040】
次に、本発明の実施例2に係る合成開口レーダ装置の動作を、飛翔体の誘導処理を中心に、図8に示すフローチャートを参照しながら説明する。なお、以下では、図6のフローチャートに示した実施例1に係る合成開口レーダ装置における飛翔体の誘導処理と同一の処理を行う部分には、実施例1で使用した符号と同一の符号を付して説明を簡略化する。
【0041】
飛翔体の誘導処理では、まず、GPS/INS補正処理が行われる(ステップS11)。次いで、SAR処理が行われる(ステップS12)。次いで、高輝度点抽出処理が行われる(ステップS13)。次いで、オートフォーカス処理が行われる(ステップS14)。次いで、SAR処理が行われる(ステップS15)。次いで、SAR画像が最小であるかどうかが調べられる(ステップS16)。このステップS16において、SAR画像が最小でないことが判断されると、次いで、飛翔経路中心設定処理が行われる(ステップS17)。次いで、誘導制御処理が行われる(ステップS18)。その後、ステップS15に戻り、上述した処理が繰り返される。
【0042】
上記ステップS16において、SAR画像が最小でないことが判断されると、飛翔経路中心の設定処理が行われる(ステップS19)。すなわち、飛翔経路中心設定部9は、現在設定されている飛翔経路中心の周りに新たな飛翔経路中心を設定する。
【0043】
次いで、強度確認および保存が行われる(ステップS20)。すなわち、飛翔経路中心設定部9は、ステップS19で設定した飛翔経路中心によって得られるSAR画像の強度を調べ、その強度の大小を、図示しないメモリに保存する。
【0044】
次いで、飛翔経路中心の設定が、あらかじめ定められている数だけ終了したかどうかが調べられる(ステップS21)。このステップS21において、飛翔経路中心の設定が終了していないことが判断されると、ステップS19に戻って上述した処理が繰り返される。
【0045】
一方、ステップS21において、飛翔経路中心の設定が終了したことが判断されると、形状認識処理が行われる(ステップS22)。すなわち、飛翔経路中心設定部9は、メモリに保存された強度の大小をプロットすることにより、目標の形状を認識する。以上により、飛翔体の誘導処理は終了する。このようにして目標の形状を認識することができれば、図示は省略するが、目標の中心や中心以外の任意の点を追尾することができる。
【0046】
以上説明したように、本発明の実施例1に係る合成開口レーダ装置によれば、複数通りの飛翔経路中心を設定し、この設定した複数の飛翔経路中心の各々に対応する画像の強度の変化よって目標の形状を認識し、この認識された目標形状の中心に飛翔体を誘導するように構成したので、目標の中心のみならず、任意の点を追尾することができる。
【0047】
なお、上述した実施例1および実施例2では、SAR処理におけるクロスレンジ方向の分解能を向上させる場合について説明したが、レンジ方向については、パルス圧縮等の技術を用いることにより、分解能を向上させることができる。
【産業上の利用可能性】
【0048】
本発明は、3次元空間の前方に存在する目標を追尾する合成開口レーダ装置に利用可能である。
【図面の簡単な説明】
【0049】
【図1】本発明の実施例1に係る合成開口レーダ装置で行われるSARの原理を説明するためのモデルを示す図である。
【図2】本発明の実施例1に係る合成開口レーダ装置の機能的な構成を示すブロック図である。
【図3】本発明の実施例1に係る合成開口レーダ装置の動作原理(その1)を説明するための図である。
【図4】本発明の実施例1に係る合成開口レーダ装置の動作原理(その2)を説明するための図である。
【図5】本発明の実施例1に係る合成開口レーダ装置の動作において、飛翔経路中心を変更する方法を説明するための図である。
【図6】本発明の実施例1に係る合成開口レーダ装置の動作を示すフローチャートである。
【図7】本発明の実施例2に係る合成開口レーダ装置の動作において、目標の形状を認識する処理を説明するための図である。
【図8】本発明の実施例1に係る合成開口レーダ装置の動作を示すフローチャートである。
【図9】従来の合成開口レーダ装置を説明するための図である。
【符号の説明】
【0050】
1 第1FFT部
2 第2FFT部
3 乗算部
4 IFFT部
5 高輝度抽出部
6 GPS/INS部
7 補正値処理部
8 参照信号処理部
9 飛翔経路中心設定部
10 誘導制御部
【技術分野】
【0001】
本発明は、合成開口レーダ(SAR;Synthetic Aperture Radar)装置に関し、特に3次元空間に存在する目標を検出対象とするエンドファイア(飛翔経路)型の合成開口レーダ装置に関する。
【背景技術】
【0002】
従来、移動しながら電波を対象物に照射し、その反射波を解析することにより、対象物の起伏や構造を明らかにする合成開口レーダ装置(以下、「SAR装置」と略する場合もある)が知られている。
【0003】
このSAR装置は、一般に、飛翔経路の側方の地上に存在する目標(2次元目標)を観測するために使用される。このSAR装置を用いて、空中の飛翔経路方向に存在する目標、つまり3次元空間の目標を観測すると、SAR装置がリニアアレイセンサを基本としているために、図9(a)に示すような円錐状のビームが形成される。
【0004】
したがって、図9(b)の輝度図に示すように、例えば破線で囲った領域に目標が存在するものとすると、径方向全体に高輝度の画像が得られるので、円錐の中のどの方向に目標が存在するかを区別できない。
【非特許文献1】大内、“リモートセンシングのための合成開口レーダの基礎”、東京電機大学出版局(2003) pp.176-178
【非特許文献2】大内、“リモートセンシングのための合成開口レーダの基礎”、東京電機大学出版局(2003) pp.210-217
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述したように、従来のSAR装置では、3次元空間の目標を観測すると、目標が存在する位置を区別できない画像が得られるので、目標の中心を特定できず、追尾等を実施することができないという問題がある。
【0006】
本発明は、上述した問題を解消するためになされたものであり、その課題は、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる合成開口レーダ装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、第1の発明は、飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部とを備えたことを特徴とする。
【0008】
また、第2の発明は、飛翔経路中心設定部は、複数通りの飛翔経路中心を設定し、該設定した複数の飛翔経路中心の各々に対して合成開口レーダ処理部から得られた画像の強度の変化よって目標の形状を認識し、誘導制御部は、飛翔経路中心設定部で認識された目標の形状の任意の点に飛翔体を誘導することを特徴とする。
【発明の効果】
【0009】
第1の発明によれば、合成開口レーダ処理部によって合成開口長を十分とり、飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標の画像を生成し、円錐状のどこに目標が存在しても、画像の径方向の大きさが最小になる場合の飛翔経路中心が、目標の中心に一致することを利用して、目標の中心方向に飛翔体を誘導するので、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる。
【0010】
また、第2の発明によれば、複数通りの飛翔経路中心を設定し、設定した複数の飛翔経路中心の各々に対応する画像の強度の変化よって目標の形状を認識し、認識された目標の形状の任意の点に飛翔体を誘導するように構成したので、目標の中心のみならず、任意の点を追尾することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。
【実施例1】
【0012】
まず、SARの原理について説明する。図1は、SARのモデルを示す。このモデルは、一般的なモデルとして、側方監視を行う場合の例を示しており、飛翔体に搭載されたSAR装置で電波を送受信して合成開口レーダ処理(以下、「SAR処理」という)を行うことにより目標を探知する状態を示している。
【0013】
今、送受信信号をe(t)とし、AZ(クロスレンジ)圧縮用の参照信号をr(t)とすると、AZ圧縮後の信号s(t)は、次式で算出できる(非特許文献1参照)。
【数1】
【0014】
ここで、
e(t) ;送受信信号
E(f) ;e(t)のフーリエ変換
r(t) ;参照信号
R(f) ;r(t)のフーリエ変換
s(t) ;SAR画像
S(f) ;s(t)のフーリエ変換
FFT[ ] ;フーリエ変換
FFT-1[ ];逆フーリエ変換
* ;複素共役
SAR処理では、目標の飛翔経路や機体動揺が存在する場合は、参照信号の補正が必要である。図2は、この参照信号の補正を行うように構成された、本発明の実施例1に係るSAR装置の機能的な構成を示すブロック図である。参照信号の補正方法としては、GPS/INS(全地球測位システム;Global Positioning System/慣性航法システム;Inertial Navigation System)を用いた補正と、オートフォーカスによる補正(非特許文献2参照)とが用いられる。
【0015】
SAR装置は、第1FFT部1、第2FFT部2、乗算部3、IFFT部4、高輝度抽出部5、GPS/INS部6、補正値処理部7、参照信号処理部8、飛翔経路中心設定部9および誘導制御部10を備えている。本発明の合成開口レーダ処理部は、第1FFT部1、第2FFT部2、乗算部3、IFFT部4、高輝度抽出部5、GPS/INS部6、補正値処理部7および参照信号処理部8から構成されている。
【0016】
第1FFT部1は、式(1)にしたがって、図示しない受信機から入力される送受信信号e(t)をフーリエ変換し、信号E(f)として乗算部3に送る。第2FFT部2は、式(2)にしたがって、参照信号処理部8から送られてくる参照信号r(t)をフーリエ変換し、信号R(f)として乗算部3に送る。
【0017】
乗算部3は、式(3)にしたがって、第1FFT部1から送られてくる信号E(f)と第2FFT部2から送られてくる信号R(f)を乗算し、信号S(f)としてIFFT部4に送る。IFFT部4は、式(4)にしたがって、乗算部3から送られてくる信号S(f)を逆フーリエ変換する。このIFFT部4で逆フーリエ変換することにより得られた信号s(t)は、SAR画像として、高輝度抽出部5および飛翔経路中心設定部9に送られる。なお、このSAR画像は、本発明の「画像」に対応する。
【0018】
高輝度抽出部5は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像から高輝度部分を抽出する。この高輝度抽出部5で抽出された高輝度部分を表す信号は、補正値処理部7に送られる。GPS/INS部6は、GPS衛星航法と慣性航法システムとを組み合わせ、連続的に高精度な位置、速度、姿勢情報等を生成する。このGPS/INS部6で生成された情報は、補正値処理部に送られる。
【0019】
補正値処理部7は、高輝度抽出部5から送られてくる高輝度部分を表す信号、および、GPS/INS部6から送られてくる情報に基づき参照信号を補正するための補正値を生成し、参照信号処理部8に送る。この補正値処理部7で生成された補正値に基づき参照信号が補正されることにより、振幅が大きくシャープな補正後のSAR画像が得られる。参照信号処理部8は、補正値処理部7から送られてくる補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0020】
飛翔経路中心設定部9は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像に含まれる目標が最小になるよう飛翔経路中心を設定する。この飛翔経路中心設定部9で設定された飛翔経路中心は、誘導制御部10に送られる。誘導制御部10は、飛翔経路中心設定部9で設定された飛翔経路中心に向くように飛翔体を誘導する。
【0021】
次に、本発明の実施例1に係る合成開口レーダ装置の動作を説明する。ここでは、図9に示すような、エンドファイア(飛翔経路)方向を中心としたSAR処理を行う場合について説明する。
【0022】
エンドファイア方向においては、飛翔経路軸を中心として、その周りに、円錐状に高分解能のビームを形成できる。このビームで目標を観測する際には、図3と図4とに比較して示すように、目標の中心と飛翔経路中心の一致度により、円錐状のビームで観測されるSAR画像の大きさ(径方向の広がり)が異なり、飛翔経路中心と目標の中心が一致した場合に、SAR画像が最も小さくなる。
【0023】
例えば、図3(a)に破線で囲って示すように、飛翔経路中心からずれた位置に目標が存在する場合は、図3(b)の輝度図に示すように、中心部が低輝度で、その周囲が全体的に高輝度のSAR画像が得られる。この場合、図3(c)の強度分布図に示すように、SAR画像の径方向の広がりが大きく(幅広に)なる。
【0024】
一方、図4(a)に破線で囲って示すように、飛翔経路中心の近傍に目標が存在する場合は、図4(b)の輝度図に示すように、中心部およびその周囲が全体的に高輝度で、外周部が低輝度のSAR画像が得られる。この場合、図4(c)の強度分布図に示すように、SAR画像の径方向の広がりは小さく(幅狭に)なる。したがって、飛翔経路中心を変更することによって、SAR画像の大きさが最も小さくなる点を見つければ、目標の中心を決定することができる。
【0025】
図5は、飛翔経路中心設定部9において行われる飛翔経路中心を変更する方法を説明するための図である。IFFT部4から得られるSAR画像を、図5(a)に示すように、X軸とY軸が直交する2次元空間に割り当てる。この時点では、目標の中心は飛翔経路中心から離れた位置に存在する。
【0026】
この状態で、図5(b)に示すように、飛翔経路中心をX軸の方向に動かして、SAR画像が最も小さくなる位置を探してX軸方向の位置を決定する。その後、図5(c)に示すように、飛翔経路中心をY軸の方向に動かして、SAR画像が最も小さくなる位置を探してY軸方向の位置を決定する。このようにして決定されたX軸およびY軸方向のSAR画像が最も小さくなる点が目標の中心として決定され、その目標の中心が飛翔経路中心として設定される。
【0027】
なお、上述した飛翔経路中心を変更する方法では、まず、飛翔経路中心をX軸方向に動かした後にY軸方向に動かすように構成したが、先にY軸方向の動かした後に、X軸方向に動かすように構成することもできる。
【0028】
次に、本発明の実施例1に係る合成開口レーダ装置の動作を、飛翔体の誘導処理を中心に、図6に示すフローチャートを参照しながら説明する。
【0029】
飛翔体の誘導処理では、まず、GPS/INS補正処理が行われる(ステップS11)。すなわち、GPS/INS部6は、連続的に高精度な位置、速度、姿勢情報等を生成して補正値処理部7に送る。補正値処理部7は、GPS/INS部6から送られてきた情報に基づき参照信号を補正するための補正値を生成し、参照信号処理部8に送る。参照信号処理部8は、補正値処理部7から送られてくる補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0030】
次いで、SAR処理が行われる(ステップS12)。すなわち、第1FFT部1は、図示しない受信機から入力される送受信信号e(t)をフーリエ変換し、信号E(f)として乗算部3に送る。また、第2FFT部2は、参照信号処理部8から送られてくる参照信号r(t)をフーリエ変換し、信号R(f)として乗算部3に送る。乗算部3は、第1FFT部1から送られてくる信号E(f)と第2FFT部2から送られてくる信号R(f)を乗算し、信号S(f)としてIFFT部4に送る。IFFT部4は、乗算部3から送られてくる信号S(f)を逆フーリエ変換して信号s(t)を生成し、SAR画像として、高輝度抽出部5および飛翔経路中心設定部9に送る。
【0031】
次いで、高輝度点抽出処理が行われる(ステップS13)。すなわち、高輝度抽出部5は、IFFT部4から送られてくる信号s(t)によって示されるSAR画像の高輝度部分を抽出し、補正値処理部7に送る。
【0032】
次いで、オートフォーカス処理が行われる(ステップS14)。補正値処理部7は、例えば、高輝度抽出部5から送られてくる画像からピーク値(極大値)を抽出し、この抽出したピーク値の回りのクロスレンジ方向の所定範囲のMセルの信号をフーリエ変換し、このフーリエ変換により得られた信号を用いて参照信号を補正するための補正値を生成して参照信号処理部8に送る。参照信号処理部8は、補正値処理部7から送られてきた補正値にしたがって参照信号を補正し、新たな参照信号r(t)として第2FFT部2に送る。
【0033】
次いで、SAR処理が行われる(ステップS15)。すなわち、このステップS14においては、上述したステップS12における処理と同様にして、SAR画像が生成され、高輝度抽出部5および飛翔経路中心設定部9に送られる。
【0034】
次いで、SAR画像が最小であるかどうかが調べられる(ステップS16)。すなわち、飛翔経路中心設定部9は、図5を参照して説明した手順で、IFFT部4から送られてくる信号s(t)によって示されるSAR画像に含まれる目標が最小であるかどうかを調べる。このステップS16において、SAR画像が最小でないことが判断されると、次いで、飛翔経路中心設定処理が行われる(ステップS17)。すなわち、飛翔経路中心設定部9は、図5を参照して説明した手順で、飛翔経路中心を変更して誘導制御部10に送る。
【0035】
次いで、誘導制御処理が行われる(ステップS18)。すなわち、誘導制御部10は、飛翔経路中心設定部9から送られてくる飛翔経路中心に向くように飛翔体を誘導する。その後、ステップS15に戻り、SAR画像に含まれる目標が最小になるまで、上述した処理が繰り返される。そして、ステップS16において、SAR画像が最小でないことが判断されると、飛翔体の誘導処理は終了する。
【0036】
以上説明したように、本発明の実施例1に係る合成開口レーダ装置によれば、合成開口レーダ処理によって合成開口長を十分とり、飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標の画像を生成し、円錐状のどこに目標が存在しても、画像の径方向の大きさが最小になる場合の飛翔経路中心が、目標の中心に一致することを利用して、目標の中心方向に飛翔体を誘導するように構成したので、飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる。
【実施例2】
【0037】
本発明の実施例2に係る合成開口レーダ装置は、実施例1で説明した方法を用いて目標の形状(広がり)を認識するようにしたものである。この実施例2に係る合成開口レーダ装置の構成は、飛翔経路中心設定部9の機能を除き、図2に示した実施例1に係る合成開口レーダ装置の構成と同じである。
【0038】
飛翔経路中心設定部9は、実施例1で説明した目標の中心を決定する機能に加え、決定した目標の中心の周りに飛翔経路中心を移動させて、目標の振幅の変化を観測することにより、目標の形状(広がり)を認識する。
【0039】
図7は、飛翔経路中心設定部9において行われる目標の形状を認識する原理を説明するための図である。飛翔経路中心設定部9は、図7(a)に示すような飛翔経路中心が目標の中心に一致している状態から、図7(b)に示すように、飛翔経路中心を他の複数の位置に設定し、SAR画像の強度を収集する。この場合、目標が飛翔経路中心から所定範囲内に存在すれば強度が大になり、そうでなければ強度は小になる。したがって、複数の飛翔経路中心の強度をプロットすることにより、図7(c)に示すような目標の形状を認識することができる。
【0040】
次に、本発明の実施例2に係る合成開口レーダ装置の動作を、飛翔体の誘導処理を中心に、図8に示すフローチャートを参照しながら説明する。なお、以下では、図6のフローチャートに示した実施例1に係る合成開口レーダ装置における飛翔体の誘導処理と同一の処理を行う部分には、実施例1で使用した符号と同一の符号を付して説明を簡略化する。
【0041】
飛翔体の誘導処理では、まず、GPS/INS補正処理が行われる(ステップS11)。次いで、SAR処理が行われる(ステップS12)。次いで、高輝度点抽出処理が行われる(ステップS13)。次いで、オートフォーカス処理が行われる(ステップS14)。次いで、SAR処理が行われる(ステップS15)。次いで、SAR画像が最小であるかどうかが調べられる(ステップS16)。このステップS16において、SAR画像が最小でないことが判断されると、次いで、飛翔経路中心設定処理が行われる(ステップS17)。次いで、誘導制御処理が行われる(ステップS18)。その後、ステップS15に戻り、上述した処理が繰り返される。
【0042】
上記ステップS16において、SAR画像が最小でないことが判断されると、飛翔経路中心の設定処理が行われる(ステップS19)。すなわち、飛翔経路中心設定部9は、現在設定されている飛翔経路中心の周りに新たな飛翔経路中心を設定する。
【0043】
次いで、強度確認および保存が行われる(ステップS20)。すなわち、飛翔経路中心設定部9は、ステップS19で設定した飛翔経路中心によって得られるSAR画像の強度を調べ、その強度の大小を、図示しないメモリに保存する。
【0044】
次いで、飛翔経路中心の設定が、あらかじめ定められている数だけ終了したかどうかが調べられる(ステップS21)。このステップS21において、飛翔経路中心の設定が終了していないことが判断されると、ステップS19に戻って上述した処理が繰り返される。
【0045】
一方、ステップS21において、飛翔経路中心の設定が終了したことが判断されると、形状認識処理が行われる(ステップS22)。すなわち、飛翔経路中心設定部9は、メモリに保存された強度の大小をプロットすることにより、目標の形状を認識する。以上により、飛翔体の誘導処理は終了する。このようにして目標の形状を認識することができれば、図示は省略するが、目標の中心や中心以外の任意の点を追尾することができる。
【0046】
以上説明したように、本発明の実施例1に係る合成開口レーダ装置によれば、複数通りの飛翔経路中心を設定し、この設定した複数の飛翔経路中心の各々に対応する画像の強度の変化よって目標の形状を認識し、この認識された目標形状の中心に飛翔体を誘導するように構成したので、目標の中心のみならず、任意の点を追尾することができる。
【0047】
なお、上述した実施例1および実施例2では、SAR処理におけるクロスレンジ方向の分解能を向上させる場合について説明したが、レンジ方向については、パルス圧縮等の技術を用いることにより、分解能を向上させることができる。
【産業上の利用可能性】
【0048】
本発明は、3次元空間の前方に存在する目標を追尾する合成開口レーダ装置に利用可能である。
【図面の簡単な説明】
【0049】
【図1】本発明の実施例1に係る合成開口レーダ装置で行われるSARの原理を説明するためのモデルを示す図である。
【図2】本発明の実施例1に係る合成開口レーダ装置の機能的な構成を示すブロック図である。
【図3】本発明の実施例1に係る合成開口レーダ装置の動作原理(その1)を説明するための図である。
【図4】本発明の実施例1に係る合成開口レーダ装置の動作原理(その2)を説明するための図である。
【図5】本発明の実施例1に係る合成開口レーダ装置の動作において、飛翔経路中心を変更する方法を説明するための図である。
【図6】本発明の実施例1に係る合成開口レーダ装置の動作を示すフローチャートである。
【図7】本発明の実施例2に係る合成開口レーダ装置の動作において、目標の形状を認識する処理を説明するための図である。
【図8】本発明の実施例1に係る合成開口レーダ装置の動作を示すフローチャートである。
【図9】従来の合成開口レーダ装置を説明するための図である。
【符号の説明】
【0050】
1 第1FFT部
2 第2FFT部
3 乗算部
4 IFFT部
5 高輝度抽出部
6 GPS/INS部
7 補正値処理部
8 参照信号処理部
9 飛翔経路中心設定部
10 誘導制御部
【特許請求の範囲】
【請求項1】
飛翔体に搭載される合成開口レーダ装置であって、
前記飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部と、
前記合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部と、
前記飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部と、
を備えたことを特徴とする合成開口レーダ装置。
【請求項2】
前記飛翔経路中心設定部は、複数通りの飛翔経路中心を設定し、該設定した複数の飛翔経路中心の各々に対して前記合成開口レーダ処理部から得られた画像の強度の変化よって目標の形状を認識し、
前記誘導制御部は、前記飛翔経路中心設定部で認識された目標の形状の任意の点に飛翔体を誘導することを特徴とする請求項1記載の合成開口レーダ装置。
【請求項1】
飛翔体に搭載される合成開口レーダ装置であって、
前記飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部と、
前記合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部と、
前記飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部と、
を備えたことを特徴とする合成開口レーダ装置。
【請求項2】
前記飛翔経路中心設定部は、複数通りの飛翔経路中心を設定し、該設定した複数の飛翔経路中心の各々に対して前記合成開口レーダ処理部から得られた画像の強度の変化よって目標の形状を認識し、
前記誘導制御部は、前記飛翔経路中心設定部で認識された目標の形状の任意の点に飛翔体を誘導することを特徴とする請求項1記載の合成開口レーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−281474(P2008−281474A)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2007−126659(P2007−126659)
【出願日】平成19年5月11日(2007.5.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成19年5月11日(2007.5.11)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]