
同心円状パターンの検査装置および検査方法
【課題】SEMにおいて、同心円状パターンの異常、欠損等を自動で検出することができる。
【解決手段】同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、前記比較結果を表示装置に出力する出力部とを備えることを特徴とする。
【解決手段】同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、前記比較結果を表示装置に出力する出力部とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、同心円状パターンの検査装置および検査方法に関し、例えば、DTM、BPM等のディスクおよび該ディスクを形成するためのテンプレートの検査装置および検査方法に関する。
【背景技術】
【0002】
ディスクリートラックメディア(DTM)やビットパターンドメディア(BPM)が次世代HDD向けに注目されている。DTMは、トラック間に非磁性領域を設けて隣接トラック間の相互作用を低減し、SNを向上する技術である。BPMは、トラック間に加えてビット間にも非磁性領域を設け、すべてのビットが分離したパターンを形成する。
【0003】
DTM、BPMでは、ディスク上に、バーストパターンと呼ばれるドット状パターンを有するサーボ部、データを記憶する線状パターンを有するトラック部が、同心円状に形成される。これらのパターニングにはナノインプリントが適用される。
【0004】
ナノインプリントでのパターニングは、ナノインプリント用テンプレートをEB描画機で作成し、このテンプレートに基づき、DTMおよびBPM等のディスクが量産される。従って、最終的に製造されるディスクの品質およびスループットを向上するには、テンプレートに形成されたパターンの異常、欠損等を発見し、これらを修正する必要がある。
【0005】
このようなパターンの異常、欠損等を発見するには、一般的に、走査型電子顕微鏡(SEM)が用いられる。ディスクの一部にでも不良箇所が存在すれば、そのディスクは使用できないため、テンプレート全体を観察する必要がある。しかし、SEMは観察視野が狭いため、テンプレート全体を検査することは労力を要する。
【0006】
非特許文献1では、ナノインプリントプロセスに最適化された欠陥可視化マクロ検査装置を開示している。ここでは、照射光の配列条件により、方向性の異なるパターンやスポット径を分離可能としている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】「ナノインプリント用モールドの最新動向次世代HDDとナノインプリント用欠陥可視化マクロ検査装置」、中川健二、2 0 1 0年2 月、http://www.t-kihan.com/common/pdf/mag100200.pdf
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記非特許文献1の検査装置は、光学レンズの0.75〜4.5倍程度の倍率しかないため、より微細なパターンについては適用できない。また、パターンの異常、欠損等を自動で検出する方法については開示していない。
【0009】
本発明は、上記課題に鑑みてなされたものであり、SEMにおいて、同心円状パターンの異常、欠損等を自動で検出する同心円状パターンの検査装置および検査方法を提供する。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明は、同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から、隣接するパターン同士のずれまたは試料の中心点を算出し、前記パターンのずれまたは試料の中心点と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、前記比較結果を表示装置に出力する出力部とを備えることを特徴とする。
【発明の効果】
【0011】
SEMにおいて、同心円状パターンの異常、欠損等を自動で検出することができる。個の他の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る同心円状パターンの検査装置の全体構成図である。
【図2】制御装置の内部構成図である。
【図3】同心円状パターンの検査装置のローカル計測の流れを示すフローチャートである。
【図4】重心点の傾きmからパターンのずれ量を測定する方法を説明する図である。
【図5】重心間距離dからパターンのずれ量を測定する方法を説明する図である。
【図6】中心線間距離eからパターンのずれ量を測定する方法を説明する図である。
【図7】同心円状パターンの検査装置のグローバル計測の流れを示すフローチャートである。
【図8】バーストパターンから円の中心座標を算出する方法を説明する図である。
【図9】バーストパターンから円の中心座標を算出する方法を説明する図である。
【図10】ローカル計測の出力結果を表示した図である。
【図11】ローカル計測の出力結果を表示した図である。
【発明を実施するための形態】
【0013】
本発明は、DTM、BPM等のディスクおよび該ディスクを形成するためのテンプレートの検査装置および検査方法に関する。以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は、本発明を実施するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成には同一の参照番号が付されている。
【0014】
<検査装置の構成>
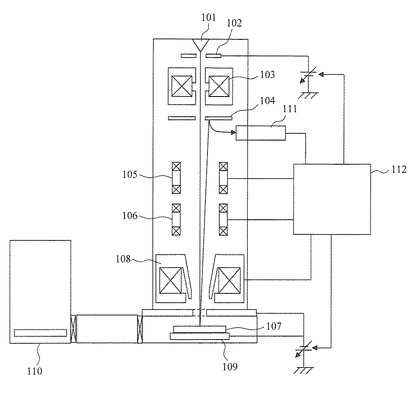
図1は、本発明の実施形態に係る同心円状パターンの検査装置の全体構成図である。同心円状パターンの検査装置は、電子ビームを発する電子銃101、電子ビームを加速する加速電極102、電子ビームを集束する集束レンズ103、電子ビームの不要な領域を除去する絞り104、電子ビームを偏向する偏向器105および106、電子ビームを試料107に集束させる対物レンズ108、試料107を載置するステージ109、試料をストックする試料室110、試料107からの二次電子を検出する二次電子検出器111、および制御装置112を備える。試料は、最終製品となるDTM、BPM等のディスク、および該ディスクを形成するためのナノインプリント用のテンプレートを含む。
【0015】
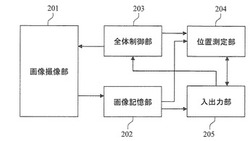
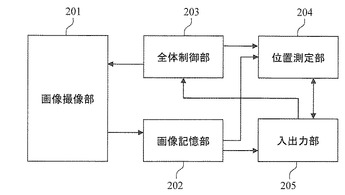
図2は、制御装置112の内部構成図である。制御装置112は、二次電子検出器111からの信号に基づき画像を撮像する画像撮像部201、撮像画像を記憶する画像記憶部202、偏向器105および106、対物レンズ108、ステージ109の移動、二次電子検出器111、加速電極102の電源、およびステージ電圧およびリターディング電圧の電源を制御する全体制御部203、撮像画像に基づき所定の計算を行う位置測定部204、並びに表示装置に画像を表示したり、各手段に指示を送る入出力部205を備える。また、制御装置112は、記憶装置、表示装置、およびポインティングデバイス等を備えるPC等である。オペレータは、試料の検査対象となる位置を入出力部205を通して、全体制御部203に指示する。画像撮像部201は、その指示に基づき画像を取得する。画像記憶部202は、取得した画像を保存する。位置測定部204は、取得された画像から、測定点の重心および試料の中心からの座標を計測し、この計測データに基づき、パターンずれを検査する。各手段の一部又は全部は、ハードウエアとして実現可能である。また、各手段はプログラム処理を通じて実現される。
【0016】
<検査装置の処理>
本実施形態では、同心円状パターンの検査装置は、ローカル計測またはグローバル計測で検査する。ローカル計測は、同心円状パターンの一部の領域(例えば150k倍で撮影される画像)において、パターンが直線上に並んでいると考え、隣接するパターン同士でずれ量を計測する。ローカル計測により、パターンの位置ずれ、欠損等が検出できる。グローバル計測は、同心円状パターン全体(テンプレートまたはディスク全体)において、同一トラック上にある少なくとも4点のパターンの重心点のうち少なくとも1点が異なる2組のパターンからトラックの中心点を2点求め、この2点の中心点からずれ量を計測する。グローバル計測により、試料の真円度、パターンの位置ずれ等が検出できる。
【0017】
(ローカル計測)
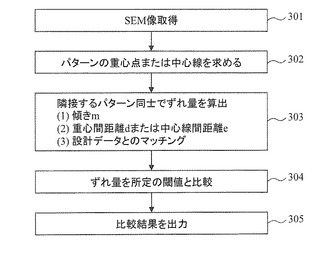
図3は、同心円状パターンの検査装置のローカル計測の流れを示すフローチャートである。
【0018】
S301では、画像撮像部201が試料の画像を撮像し、画像記憶部202が画像を記憶する。
【0019】
S302では、位置測定部204が、取得した画像からパターンの重心点または中心線を求める。
【0020】
S303では、隣接するパターン同士でずれ量を算出する。パターンのずれ量を算出する方法として、(1)重心点の傾きmから算出する方法、(2)重心間距離dまたは中心線間距離eから算出する方法、(3)設計データとのマッチングにより算出する方法がある。この3つの算出方法のうち、少なくとも1つを実行する。
【0021】
S304および305では、位置測定部204がS303で算出したずれ量をそれぞれの閾値と比較し、入出力部205が結果を出力する。
【0022】
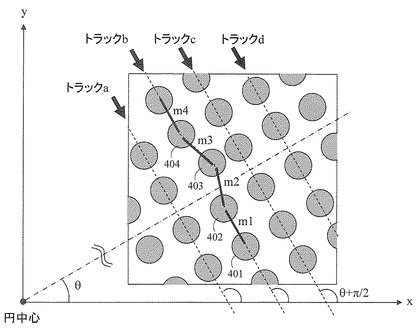
(1)重心点の傾きmからパターンのずれ量を算出する方法
図4は、重心点の傾きmからパターンのずれ量を測定する方法を説明する図である。まず、同一トラック上にある複数のバーストパターンの重心点を求め、トラック方向に隣接する2点の重心点から傾きmを求める。図では、バーストパターン401と402の重心点から傾きm1、バーストパターン402と403から傾きm2、バーストパターン403と404から傾きm3をそれぞれ求める。次に、傾きmの理論値とバーストパターンから求めた傾きとを比較し、ずれ量を算出する。画像と試料中心との傾きをθとすると、傾きmの理論値は、理論上(θ+π/2)となるので、装置上の座標データからθを算出すれば求まる。なお、画像を−θ回転させれば、傾きmの理論値はy軸に平行になるので、y軸からのずれ量を算出してもよい。
【0023】
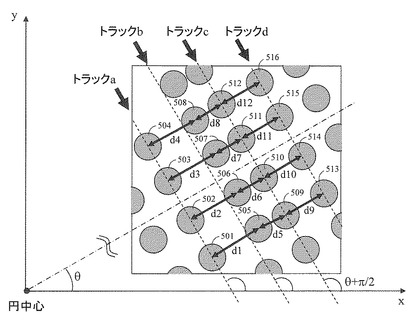
(2)重心間距離dまたは中心線間距離eからパターンのずれ量を算出する方法
図5は、重心間距離dからパターンのずれ量を測定する方法を説明する図である。同一トラック上にあるパターンが同一方向にオフセットを持った場合、傾きからはずれ量が算出できない。その場合は、重心間距離dからずれ量が測定できる。まず、同一トラック上にある複数のバーストパターンの重心点を求め、トラック方向と垂直に隣接する2点の重心点の距離dを求める。図では、バーストパターン501と505の重心点から距離d1、バーストパターン502と506から距離d2、バーストパターン503と507から距離d3、などのように求める。次に、距離dの理論値とバーストパターンから求めた距離とを比較し、ずれ量を算出する。距離dの理論値は、設計データから求めることができる。図では、d9〜d12は理論値と等しいが、d1〜d4は理論値よりも大きく、d5〜d8は理論値よりも小さい。
【0024】
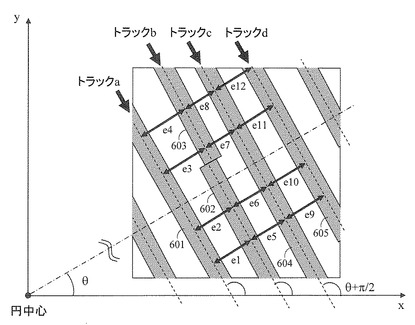
図6は、中心線間距離eからパターンのずれ量を測定する方法を説明する図である。同一トラック上にあるパターンは、図5ではドット状のバーストパターンであったが、ここでは線状のデータパターンである。まず、同一トラック上にある複数のデータパターンの中心線を左右のエッジより求める。次に、ディスク中心からの画像の傾きをθとして、隣接する2本の中心線の距離eを求める。距離eのトラック方向に対するサンプリングレート(例えば、e1とe2との間隔)は、例えば、距離eの理論値(データパターン間の距離)にしてもよいし、任意の値にしてもよい。図では、トラックbのデータパターンの中心線が途中でずれているため、データパターン601と602の中心線の距離e2と、データパターン601と603の中心線の距離e3は異なる。次に、距離eの理論値とデータパターンから求めた距離とを比較し、ずれ量を算出する。距離eの理論値は、設計データから求めることができる。
【0025】
(3)設計データとのマッチングによりパターンのずれ量を算出する方法
設計データは、パターンの理論値に相当する。したがって、設計データと画像のパターンとを重ね合わせ、パターンの重心点または中心線のずれ量を算出する。この方法は、さまざまなパターンずれに対応可能である。
【0026】
(グローバル計測)
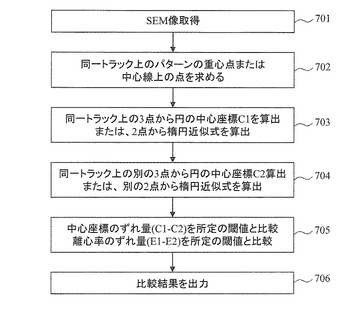
図7は、同心円状パターンの検査装置のグローバル計測の流れを示すフローチャートである。
【0027】
S701では、画像撮像部201が試料の画像を撮像し、画像記憶部202が画像を記憶する。
【0028】
S702では、位置測定部204が、取得した画像からパターンの重心点または中心線上の任意の点を求める。
【0029】
S703では、位置測定部204が、S702で求めた点のうち、同一トラック上にある3点から円の中心座標C1を算出する。または、2点から楕円近似式(x2/a12+y2/b12=1)を算出する。
【0030】
S704では、位置測定部204が、S702で求めた点のうち、同一トラック上にある3点であって、S703の3点と少なくとも1点が異なる3点から円の中心座標C2を算出する。または、S702で求めた点のうち、同一トラック上にある2点であって、S703の2点と少なくとも1点が異なる2点から楕円近似式(x2/a22+y2/b22=1)を算出する。つまり、S703と704で円の中心座標を2つ算出するには、少なくとも4点の重心点または中心線上の任意の点を求めればよい。同様に、楕円近似式を2つ算出するには、少なくとも3点の重心点または中心線上の任意の点を求めればよい。
【0031】
S705では、位置測定部204が、中心座標のずれ量(C1−C2)を所定の閾値と比較する。または、離心率のずれ量(E1−E2)を所定の閾値と比較する。離心率は、E1=√(1−b12/a12)、E2=√(1−b22/a22)で定義される。
【0032】
S706では、入出力部205が、中心座標のずれ量または離心率のずれ量の結果のうち少なくとも一方を出力する。また、SEM画像、トラックごとの重心点も併せて表示してもよい。
【0033】
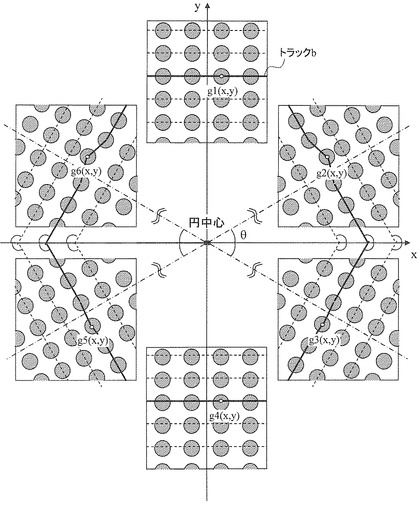
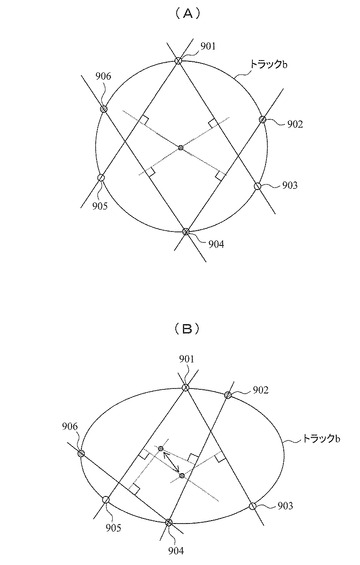
図8および図9は、バーストパターンから円の中心座標を算出する方法を説明する図である。まず、同一トラック上にあるバーストパターンのうち、少なくとも3点の重心点を求める。図8では、トラックb上にある6点の重心点g1(x,y)〜g6(x,y)を求めている。次に、バーストパターンの3点から、円の中心座標C1を算出する。図9では、バーストパターンの901、903、および905の3点から、円の中心座標C1を算出する。算出方法は、901と903、901と905を直線で結び、それぞれの直線の中点から垂線を引き、垂線が交わった場所が円の中心座標C1である。また、バーストパターンの別の3点から、円の中心座標C2を算出する。図9では、902、904、および906の別の3点から、円の中心座標C2を算出する。そして、2つの中心座標のずれ量(C1−C2)を所定の閾値と比較し、所定の閾値以内であれば真円、閾値より大きければ非真円とする。図9(A)は真円の場合であり、2つの中心座標が一致している。一方、図9(B)は非真円であり、2つの中心座標が一致していない。したがって、円の中心座標を2点算出すれば、トラックが真円であるか否かを判断できる。なお、ここでは、バーストパターンについて説明したが、データパターンであっても線状パターン上の任意の点を求めれば、同様に真円の判断が可能である。
【0034】
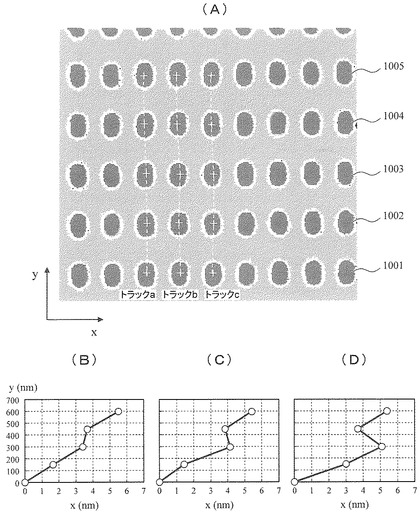
図10および図11は、ローカル計測の出力結果を表示した図である。図10(A)は、バーストパターンのSEM画像であり、略y方向にトラックa〜cが並んでいる。また、略x方向に並ぶバーストパターンを1001〜1005で表示している。この設計データ(理論値)は、トラック方向で150nm間隔、トラックに垂直方向で100nm間隔である。図10(B)〜(D)は、図10(A)のトラックa〜cごとに、バーストパターン1001を基準(原点)としたときの、1002〜1005の重心座標を順にプロットしたものである。すなわち、図10(B)〜(D)から傾きmの傾向がわかる。
【0035】
図10(A)を参照すると、目視ではバーストパターンの重心点のずれは確認できない。しかし、図10(B)〜(D)を参照すると、SEM画像はわずかに傾いているためグラフに傾きは現れるものの、x方向の差分値が異なるため傾きは一定ではないことがわかる。特に、1003と1004の間でトラックに沿ってパターンのずれが起きていると推測される。このように、トラックに垂直方向のずれの傾向がわかる。なお、トラック方向のずれの傾向を把握するには、トラックに垂直方向に並ぶバーストパターンの列ごとに、重心座標をプロットすればよい。
【0036】
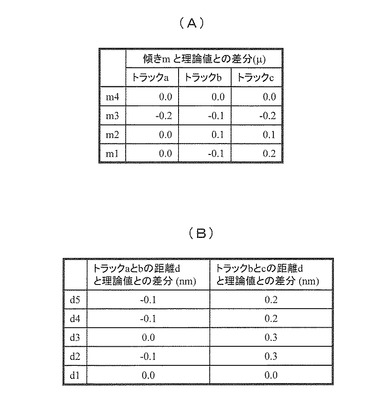
図11(A)は、図10(A)の画像から求めた傾きmと理論値との差分、図11(B)は、図10(A)の画像から求めたトラック間の距離dと理論値との差分を表示したものである。mi(i=1〜4)は隣接するドットパターン間の傾き、di(i=1〜5)は隣接するトラック間の対応するドットパターン間の距離を示す。例えば、m1とは1001の重心点と1002の重心点の傾き、トラックaとトラックbのd1とはトラックaにある1001の重心点とトラックbにある1001の重心点の距離である。
【0037】
図11(A)を参照すると、いずれのトラックにおいてもm3の値がマイナスになっていることから、パターン1003と1004との間に−x方向へのずれがあることが認識できる。言い換えると、いずれのトラック上のパターンも、トラック方向に同じようなずれの傾向を有するため、図11(B)を参照しても、ずれの傾向を認識しにくい。
【0038】
図10および図11において、所定の閾値より大きいデータをエラー表示することもできる。またエラーは、XY座標及び、r−θの極座標にも変換し出力することができ、他のプロセス装置、検査装置に座標情報を転送することが可能である。
【符号の説明】
【0039】
201・・・画像撮像部、202・・・画像記憶部、203・・・全体制御部、204・・・位置測定部、205・・・入出力部
【技術分野】
【0001】
本発明は、同心円状パターンの検査装置および検査方法に関し、例えば、DTM、BPM等のディスクおよび該ディスクを形成するためのテンプレートの検査装置および検査方法に関する。
【背景技術】
【0002】
ディスクリートラックメディア(DTM)やビットパターンドメディア(BPM)が次世代HDD向けに注目されている。DTMは、トラック間に非磁性領域を設けて隣接トラック間の相互作用を低減し、SNを向上する技術である。BPMは、トラック間に加えてビット間にも非磁性領域を設け、すべてのビットが分離したパターンを形成する。
【0003】
DTM、BPMでは、ディスク上に、バーストパターンと呼ばれるドット状パターンを有するサーボ部、データを記憶する線状パターンを有するトラック部が、同心円状に形成される。これらのパターニングにはナノインプリントが適用される。
【0004】
ナノインプリントでのパターニングは、ナノインプリント用テンプレートをEB描画機で作成し、このテンプレートに基づき、DTMおよびBPM等のディスクが量産される。従って、最終的に製造されるディスクの品質およびスループットを向上するには、テンプレートに形成されたパターンの異常、欠損等を発見し、これらを修正する必要がある。
【0005】
このようなパターンの異常、欠損等を発見するには、一般的に、走査型電子顕微鏡(SEM)が用いられる。ディスクの一部にでも不良箇所が存在すれば、そのディスクは使用できないため、テンプレート全体を観察する必要がある。しかし、SEMは観察視野が狭いため、テンプレート全体を検査することは労力を要する。
【0006】
非特許文献1では、ナノインプリントプロセスに最適化された欠陥可視化マクロ検査装置を開示している。ここでは、照射光の配列条件により、方向性の異なるパターンやスポット径を分離可能としている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】「ナノインプリント用モールドの最新動向次世代HDDとナノインプリント用欠陥可視化マクロ検査装置」、中川健二、2 0 1 0年2 月、http://www.t-kihan.com/common/pdf/mag100200.pdf
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記非特許文献1の検査装置は、光学レンズの0.75〜4.5倍程度の倍率しかないため、より微細なパターンについては適用できない。また、パターンの異常、欠損等を自動で検出する方法については開示していない。
【0009】
本発明は、上記課題に鑑みてなされたものであり、SEMにおいて、同心円状パターンの異常、欠損等を自動で検出する同心円状パターンの検査装置および検査方法を提供する。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明は、同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から、隣接するパターン同士のずれまたは試料の中心点を算出し、前記パターンのずれまたは試料の中心点と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、前記比較結果を表示装置に出力する出力部とを備えることを特徴とする。
【発明の効果】
【0011】
SEMにおいて、同心円状パターンの異常、欠損等を自動で検出することができる。個の他の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る同心円状パターンの検査装置の全体構成図である。
【図2】制御装置の内部構成図である。
【図3】同心円状パターンの検査装置のローカル計測の流れを示すフローチャートである。
【図4】重心点の傾きmからパターンのずれ量を測定する方法を説明する図である。
【図5】重心間距離dからパターンのずれ量を測定する方法を説明する図である。
【図6】中心線間距離eからパターンのずれ量を測定する方法を説明する図である。
【図7】同心円状パターンの検査装置のグローバル計測の流れを示すフローチャートである。
【図8】バーストパターンから円の中心座標を算出する方法を説明する図である。
【図9】バーストパターンから円の中心座標を算出する方法を説明する図である。
【図10】ローカル計測の出力結果を表示した図である。
【図11】ローカル計測の出力結果を表示した図である。
【発明を実施するための形態】
【0013】
本発明は、DTM、BPM等のディスクおよび該ディスクを形成するためのテンプレートの検査装置および検査方法に関する。以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は、本発明を実施するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成には同一の参照番号が付されている。
【0014】
<検査装置の構成>
図1は、本発明の実施形態に係る同心円状パターンの検査装置の全体構成図である。同心円状パターンの検査装置は、電子ビームを発する電子銃101、電子ビームを加速する加速電極102、電子ビームを集束する集束レンズ103、電子ビームの不要な領域を除去する絞り104、電子ビームを偏向する偏向器105および106、電子ビームを試料107に集束させる対物レンズ108、試料107を載置するステージ109、試料をストックする試料室110、試料107からの二次電子を検出する二次電子検出器111、および制御装置112を備える。試料は、最終製品となるDTM、BPM等のディスク、および該ディスクを形成するためのナノインプリント用のテンプレートを含む。
【0015】
図2は、制御装置112の内部構成図である。制御装置112は、二次電子検出器111からの信号に基づき画像を撮像する画像撮像部201、撮像画像を記憶する画像記憶部202、偏向器105および106、対物レンズ108、ステージ109の移動、二次電子検出器111、加速電極102の電源、およびステージ電圧およびリターディング電圧の電源を制御する全体制御部203、撮像画像に基づき所定の計算を行う位置測定部204、並びに表示装置に画像を表示したり、各手段に指示を送る入出力部205を備える。また、制御装置112は、記憶装置、表示装置、およびポインティングデバイス等を備えるPC等である。オペレータは、試料の検査対象となる位置を入出力部205を通して、全体制御部203に指示する。画像撮像部201は、その指示に基づき画像を取得する。画像記憶部202は、取得した画像を保存する。位置測定部204は、取得された画像から、測定点の重心および試料の中心からの座標を計測し、この計測データに基づき、パターンずれを検査する。各手段の一部又は全部は、ハードウエアとして実現可能である。また、各手段はプログラム処理を通じて実現される。
【0016】
<検査装置の処理>
本実施形態では、同心円状パターンの検査装置は、ローカル計測またはグローバル計測で検査する。ローカル計測は、同心円状パターンの一部の領域(例えば150k倍で撮影される画像)において、パターンが直線上に並んでいると考え、隣接するパターン同士でずれ量を計測する。ローカル計測により、パターンの位置ずれ、欠損等が検出できる。グローバル計測は、同心円状パターン全体(テンプレートまたはディスク全体)において、同一トラック上にある少なくとも4点のパターンの重心点のうち少なくとも1点が異なる2組のパターンからトラックの中心点を2点求め、この2点の中心点からずれ量を計測する。グローバル計測により、試料の真円度、パターンの位置ずれ等が検出できる。
【0017】
(ローカル計測)
図3は、同心円状パターンの検査装置のローカル計測の流れを示すフローチャートである。
【0018】
S301では、画像撮像部201が試料の画像を撮像し、画像記憶部202が画像を記憶する。
【0019】
S302では、位置測定部204が、取得した画像からパターンの重心点または中心線を求める。
【0020】
S303では、隣接するパターン同士でずれ量を算出する。パターンのずれ量を算出する方法として、(1)重心点の傾きmから算出する方法、(2)重心間距離dまたは中心線間距離eから算出する方法、(3)設計データとのマッチングにより算出する方法がある。この3つの算出方法のうち、少なくとも1つを実行する。
【0021】
S304および305では、位置測定部204がS303で算出したずれ量をそれぞれの閾値と比較し、入出力部205が結果を出力する。
【0022】
(1)重心点の傾きmからパターンのずれ量を算出する方法
図4は、重心点の傾きmからパターンのずれ量を測定する方法を説明する図である。まず、同一トラック上にある複数のバーストパターンの重心点を求め、トラック方向に隣接する2点の重心点から傾きmを求める。図では、バーストパターン401と402の重心点から傾きm1、バーストパターン402と403から傾きm2、バーストパターン403と404から傾きm3をそれぞれ求める。次に、傾きmの理論値とバーストパターンから求めた傾きとを比較し、ずれ量を算出する。画像と試料中心との傾きをθとすると、傾きmの理論値は、理論上(θ+π/2)となるので、装置上の座標データからθを算出すれば求まる。なお、画像を−θ回転させれば、傾きmの理論値はy軸に平行になるので、y軸からのずれ量を算出してもよい。
【0023】
(2)重心間距離dまたは中心線間距離eからパターンのずれ量を算出する方法
図5は、重心間距離dからパターンのずれ量を測定する方法を説明する図である。同一トラック上にあるパターンが同一方向にオフセットを持った場合、傾きからはずれ量が算出できない。その場合は、重心間距離dからずれ量が測定できる。まず、同一トラック上にある複数のバーストパターンの重心点を求め、トラック方向と垂直に隣接する2点の重心点の距離dを求める。図では、バーストパターン501と505の重心点から距離d1、バーストパターン502と506から距離d2、バーストパターン503と507から距離d3、などのように求める。次に、距離dの理論値とバーストパターンから求めた距離とを比較し、ずれ量を算出する。距離dの理論値は、設計データから求めることができる。図では、d9〜d12は理論値と等しいが、d1〜d4は理論値よりも大きく、d5〜d8は理論値よりも小さい。
【0024】
図6は、中心線間距離eからパターンのずれ量を測定する方法を説明する図である。同一トラック上にあるパターンは、図5ではドット状のバーストパターンであったが、ここでは線状のデータパターンである。まず、同一トラック上にある複数のデータパターンの中心線を左右のエッジより求める。次に、ディスク中心からの画像の傾きをθとして、隣接する2本の中心線の距離eを求める。距離eのトラック方向に対するサンプリングレート(例えば、e1とe2との間隔)は、例えば、距離eの理論値(データパターン間の距離)にしてもよいし、任意の値にしてもよい。図では、トラックbのデータパターンの中心線が途中でずれているため、データパターン601と602の中心線の距離e2と、データパターン601と603の中心線の距離e3は異なる。次に、距離eの理論値とデータパターンから求めた距離とを比較し、ずれ量を算出する。距離eの理論値は、設計データから求めることができる。
【0025】
(3)設計データとのマッチングによりパターンのずれ量を算出する方法
設計データは、パターンの理論値に相当する。したがって、設計データと画像のパターンとを重ね合わせ、パターンの重心点または中心線のずれ量を算出する。この方法は、さまざまなパターンずれに対応可能である。
【0026】
(グローバル計測)
図7は、同心円状パターンの検査装置のグローバル計測の流れを示すフローチャートである。
【0027】
S701では、画像撮像部201が試料の画像を撮像し、画像記憶部202が画像を記憶する。
【0028】
S702では、位置測定部204が、取得した画像からパターンの重心点または中心線上の任意の点を求める。
【0029】
S703では、位置測定部204が、S702で求めた点のうち、同一トラック上にある3点から円の中心座標C1を算出する。または、2点から楕円近似式(x2/a12+y2/b12=1)を算出する。
【0030】
S704では、位置測定部204が、S702で求めた点のうち、同一トラック上にある3点であって、S703の3点と少なくとも1点が異なる3点から円の中心座標C2を算出する。または、S702で求めた点のうち、同一トラック上にある2点であって、S703の2点と少なくとも1点が異なる2点から楕円近似式(x2/a22+y2/b22=1)を算出する。つまり、S703と704で円の中心座標を2つ算出するには、少なくとも4点の重心点または中心線上の任意の点を求めればよい。同様に、楕円近似式を2つ算出するには、少なくとも3点の重心点または中心線上の任意の点を求めればよい。
【0031】
S705では、位置測定部204が、中心座標のずれ量(C1−C2)を所定の閾値と比較する。または、離心率のずれ量(E1−E2)を所定の閾値と比較する。離心率は、E1=√(1−b12/a12)、E2=√(1−b22/a22)で定義される。
【0032】
S706では、入出力部205が、中心座標のずれ量または離心率のずれ量の結果のうち少なくとも一方を出力する。また、SEM画像、トラックごとの重心点も併せて表示してもよい。
【0033】
図8および図9は、バーストパターンから円の中心座標を算出する方法を説明する図である。まず、同一トラック上にあるバーストパターンのうち、少なくとも3点の重心点を求める。図8では、トラックb上にある6点の重心点g1(x,y)〜g6(x,y)を求めている。次に、バーストパターンの3点から、円の中心座標C1を算出する。図9では、バーストパターンの901、903、および905の3点から、円の中心座標C1を算出する。算出方法は、901と903、901と905を直線で結び、それぞれの直線の中点から垂線を引き、垂線が交わった場所が円の中心座標C1である。また、バーストパターンの別の3点から、円の中心座標C2を算出する。図9では、902、904、および906の別の3点から、円の中心座標C2を算出する。そして、2つの中心座標のずれ量(C1−C2)を所定の閾値と比較し、所定の閾値以内であれば真円、閾値より大きければ非真円とする。図9(A)は真円の場合であり、2つの中心座標が一致している。一方、図9(B)は非真円であり、2つの中心座標が一致していない。したがって、円の中心座標を2点算出すれば、トラックが真円であるか否かを判断できる。なお、ここでは、バーストパターンについて説明したが、データパターンであっても線状パターン上の任意の点を求めれば、同様に真円の判断が可能である。
【0034】
図10および図11は、ローカル計測の出力結果を表示した図である。図10(A)は、バーストパターンのSEM画像であり、略y方向にトラックa〜cが並んでいる。また、略x方向に並ぶバーストパターンを1001〜1005で表示している。この設計データ(理論値)は、トラック方向で150nm間隔、トラックに垂直方向で100nm間隔である。図10(B)〜(D)は、図10(A)のトラックa〜cごとに、バーストパターン1001を基準(原点)としたときの、1002〜1005の重心座標を順にプロットしたものである。すなわち、図10(B)〜(D)から傾きmの傾向がわかる。
【0035】
図10(A)を参照すると、目視ではバーストパターンの重心点のずれは確認できない。しかし、図10(B)〜(D)を参照すると、SEM画像はわずかに傾いているためグラフに傾きは現れるものの、x方向の差分値が異なるため傾きは一定ではないことがわかる。特に、1003と1004の間でトラックに沿ってパターンのずれが起きていると推測される。このように、トラックに垂直方向のずれの傾向がわかる。なお、トラック方向のずれの傾向を把握するには、トラックに垂直方向に並ぶバーストパターンの列ごとに、重心座標をプロットすればよい。
【0036】
図11(A)は、図10(A)の画像から求めた傾きmと理論値との差分、図11(B)は、図10(A)の画像から求めたトラック間の距離dと理論値との差分を表示したものである。mi(i=1〜4)は隣接するドットパターン間の傾き、di(i=1〜5)は隣接するトラック間の対応するドットパターン間の距離を示す。例えば、m1とは1001の重心点と1002の重心点の傾き、トラックaとトラックbのd1とはトラックaにある1001の重心点とトラックbにある1001の重心点の距離である。
【0037】
図11(A)を参照すると、いずれのトラックにおいてもm3の値がマイナスになっていることから、パターン1003と1004との間に−x方向へのずれがあることが認識できる。言い換えると、いずれのトラック上のパターンも、トラック方向に同じようなずれの傾向を有するため、図11(B)を参照しても、ずれの傾向を認識しにくい。
【0038】
図10および図11において、所定の閾値より大きいデータをエラー表示することもできる。またエラーは、XY座標及び、r−θの極座標にも変換し出力することができ、他のプロセス装置、検査装置に座標情報を転送することが可能である。
【符号の説明】
【0039】
201・・・画像撮像部、202・・・画像記憶部、203・・・全体制御部、204・・・位置測定部、205・・・入出力部
【特許請求の範囲】
【請求項1】
同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、
前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、
前記比較結果を表示装置に出力する出力部と
を備えることを特徴とする同心円状パターンの検査装置。
【請求項2】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、隣接するパターン間の傾きまたは距離を算出し、該傾きまたは距離と前記理論値との差分値を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項3】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、同一トラック上に存在する少なくとも4点のパターンの重心点のうち少なくとも1点が異なる2組のパターンを選択し、該2組を用いて第1および第2の中心座標を算出し、前記第1および第2の中心座標から前記トラックの真円度を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項4】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、同一トラック上に存在する少なくとも3点のパターンの重心点のうち少なくとも1点が異なる2組のパターンを選択し、該2組を用いて第1および第2の楕円近似式を求め、前記第1および第2の楕円近似式から前記トラックの真円度を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項5】
画像撮像部が、同心円状のパターンを有する試料のSEM画像を撮像するステップと、
位置測定部が、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較するステップと、
出力部が、前記比較結果を表示装置に出力するステップと
を備えることを特徴とする同心円状パターンの検査方法。
【請求項1】
同心円状のパターンを有する試料のSEM画像を撮像する画像撮像部と、
前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較する位置測定部と、
前記比較結果を表示装置に出力する出力部と
を備えることを特徴とする同心円状パターンの検査装置。
【請求項2】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、隣接するパターン間の傾きまたは距離を算出し、該傾きまたは距離と前記理論値との差分値を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項3】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、同一トラック上に存在する少なくとも4点のパターンの重心点のうち少なくとも1点が異なる2組のパターンを選択し、該2組を用いて第1および第2の中心座標を算出し、前記第1および第2の中心座標から前記トラックの真円度を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項4】
前記位置測定部は、前記重心点または前記中心線上の任意の点から、同一トラック上に存在する少なくとも3点のパターンの重心点のうち少なくとも1点が異なる2組のパターンを選択し、該2組を用いて第1および第2の楕円近似式を求め、前記第1および第2の楕円近似式から前記トラックの真円度を求めることを特徴とする請求項1記載の同心円状パターンの検査装置。
【請求項5】
画像撮像部が、同心円状のパターンを有する試料のSEM画像を撮像するステップと、
位置測定部が、前記画像からドット状パターンの重心点または線状パターンの中心線を求め、求めた重心点または中心線から所定の値を算出し、該所定の値と理論値との差分値を求め、該差分値と所定の閾値とを比較するステップと、
出力部が、前記比較結果を表示装置に出力するステップと
を備えることを特徴とする同心円状パターンの検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−98240(P2012−98240A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−248255(P2010−248255)
【出願日】平成22年11月5日(2010.11.5)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月5日(2010.11.5)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]