
同期回転電機
【課題】同期運転時において固定子の回転磁界と回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる同期回転電機を提供する。
【解決手段】同期回転電動機11は隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石19を有する回転子13を備えており、固定子巻線は集中巻である。回転子13には永久磁石19より内径側で永久磁石19間と対応する位置にバー導体20aを配置し、全回転領域で常に同期運転を行うようにした。同期回転電動機11はスロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである。
【解決手段】同期回転電動機11は隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石19を有する回転子13を備えており、固定子巻線は集中巻である。回転子13には永久磁石19より内径側で永久磁石19間と対応する位置にバー導体20aを配置し、全回転領域で常に同期運転を行うようにした。同期回転電動機11はスロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、同期回転電機に係り、詳しくは回転子(ロータ)に永久磁石が設けられた同期回転電機に関する。
【背景技術】
【0002】
回転子に永久磁石を有する同期モータは、固定子に設けられた固定子巻線の回転磁界と回転子の永久磁石の磁束との相互作用によって回転子が回転磁界と同期速度で回転する。各相の固定子巻線のインダクタンスは回転子の回転位置に応じて変化し、回転子の回転に伴って固定子巻線のインダクタンスが増加するときに固定子巻線に励磁電流を供給すると、回転子を回転方向に回転させるトルク(正トルク)が発生する。一方、回転子の回転に伴って固定子巻線のインダクタンスが減少するときに固定子巻線に励磁電流を供給すると、回転子を回転方向と反対方向に回転させるトルク(負トルク)が発生する。そして、回転子の位置に対応して各相の固定子巻線への励磁電流の供給タイミングを制御する(例えば、特許文献1参照。)。
【0003】
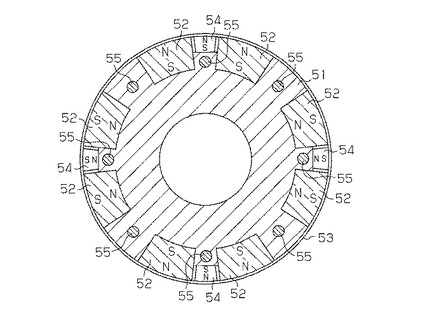
また、永久磁石式回転電機として、回転子に永久磁石の他に始動巻線を形成する導体を備えたものがある(例えば、特許文献2参照)。特許文献2に開示された回転電機は、図7に示すように、回転子51に複数の第1永久磁石52と、第1永久磁石52の間に第1永久磁石52と同じ極性を電機子としての固定子53に向け、固定子53から見た背面までの距離を第1永久磁石52よりも小さくなるように配置した第2永久磁石54とから成る界磁極が設けられている。界磁極の間及び第2永久磁石54の背面側に始動巻線を構成する導体55が設けられている。始動巻線を設けた永久磁石式同期電機では、非同期制御で始動された後、同期制御となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−278989号公報
【特許文献2】特開昭57−145556号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
回転電機は小型化が望まれており、同じ消費電力においてトルクアップを図ることができれば回転電機の小型化も容易になる。しかし、特許文献1のように固定子の回転磁界と回転子の永久磁石の磁束との相互作用だけによって回転子を回転させる構成では、トルクアップを図るには消費電力が多くなる。
【0006】
一方、特許文献2は始動巻線を設けることにより、非同期運転時である始動時のトルクは大きくなる。しかし、始動巻線を構成する導体55は始動トルクを得るためのものであり、同期運転時のトルクアップに関しては何ら考慮されていない。
【0007】
本発明は前記の問題に鑑みてなされたものであって、その目的は、全回転領域において固定子の回転磁界と回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる同期回転電機を提供することにある。
【課題を解決するための手段】
【0008】
前記の目的を達成するため、請求項1に記載の発明は、隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石を有する回転子を備えた同期回転電機であって、固定子巻線を集中巻とし、前記回転子には前記永久磁石より内径側又は前記永久磁石間に二次導体を配置した。
【0009】
従来、二次導体を備えた永久磁石式同期回転電機はあるが、二次導体は始動トルクを得るために設けられており、始動時には非同期制御で運転が開始され、その後同期運転に移行される。一方、この発明の回転電機を、始動時から常に同期制御で運転すると、始動時以外の同期運転時にも、空間起磁力分布の高調波成分の一部が二次導体に作用することにより、二次導体から回転子の回転方向に対して正の誘導トルクが発生する。そして、固定子巻線が集中巻のため、分布巻に比べて高調波成分が多い。したがって、全回転領域において固定子の回転磁界と、回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0010】
請求項2に記載の発明は、請求項1に記載の発明において、回転電機は全回転領域で同期運転を行う。したがって、全回転領域において固定子の回転磁界と、回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0011】
請求項3に記載の発明は、請求項1又は2に記載の発明において、スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである。分数スロットでは極数とスロット数を近づけることで極数とスロット数の最小公倍数が大きな組み合わせが実現できる。また、同相の固定子巻線に対応するティースであっても、ティースごとに回転子の永久磁石との対向具合が異なる配置となり、スキューなしでもコギングトルクやトルクリプルを小さくすることができる。
【0012】
請求項4に記載の発明は、請求項3に記載の発明において、前記スロット数が24、磁極数が28の3相交流電機である。したがって、一般に使用される3相回転電機において、トルクアップを図ることができる。
【発明の効果】
【0013】
本発明によれば、全回転領域において固定子の回転磁界と回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる同期回転電機を提供することができる。
【図面の簡単な説明】
【0014】
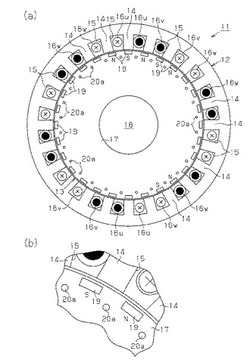
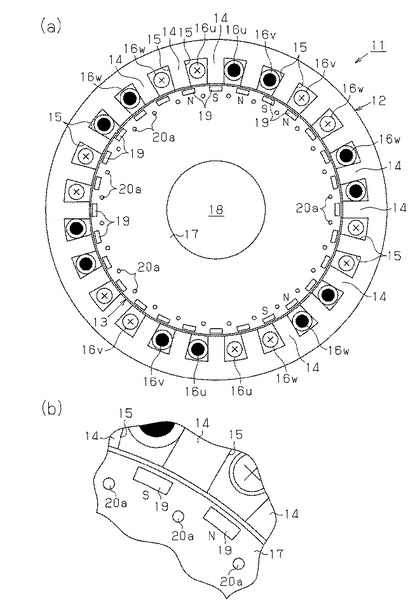
【図1】(a)は同期回転電動機の模式断面図、(b)は(a)の部分拡大図。
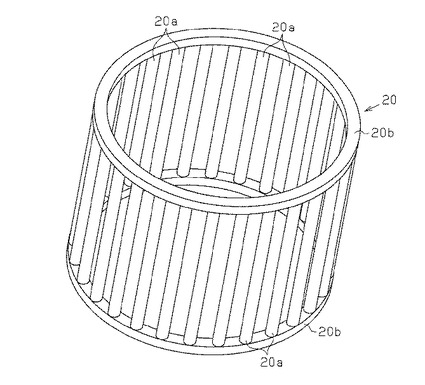
【図2】二次導体の斜視図。
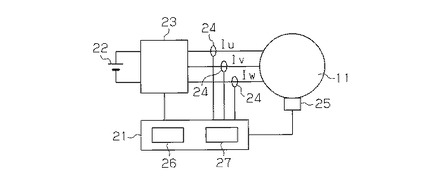
【図3】同期回転電動機の制御構成を示すブロック図。
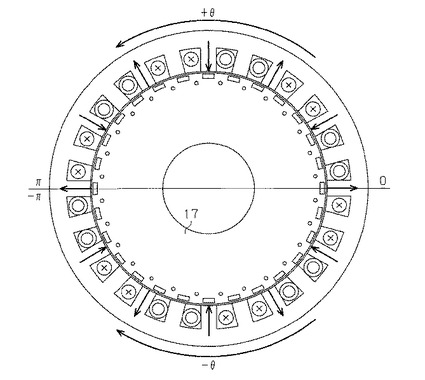
【図4】起磁力座標の定義を示す模式図。
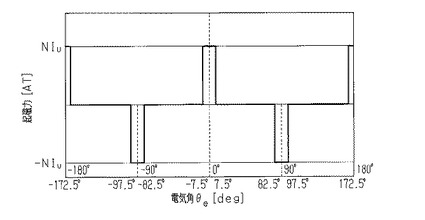
【図5】U相単層巻起磁力分布を示す図。
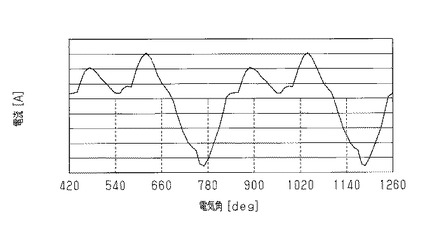
【図6】二次導体に流れる電流を示す図。
【図7】従来技術の断面図。
【発明を実施するための形態】
【0015】
以下、本発明を3相の同期回転電動機に具体化した一実施形態を図1〜図6にしたがって説明する。
図1(a)に示すように、同期回転電動機11は、円筒状の固定子(ステータ)12及び固定子12の内側に配置された回転子13を備えている。固定子12は、内側に複数のティース14が等間隔になるようにスロット15が等間隔で設けられている。この実施形態ではティース14及びスロット15がそれぞれ24個設けられている。ティース14には、固定子巻線としてのU相巻線16u、V相巻線16v、W相巻線16wがそれぞれ集中巻で巻回されている。U相巻線16u、V相巻線16v、W相巻線16wは、図1において時計方向にU相、V相、W相の順で配置されるように、かつ、同相の巻線が直列で各ティース14に巻き付けられた巻線の巻き付け方向がティース14毎に交互に反対方向となるように単層巻で巻き付けられている。即ち、U相巻線16u、V相巻線16v、W相巻線16wにそれぞれ電流が供給された際、同相の巻線が巻き付けられたティース14の起磁力の向きが交互に反対方向となるように巻き付けられている。
【0016】
回転子13は、円板状の電磁鋼板を複数枚(例えば、数十枚)積層したロータコア17と、ロータコア17の中心に貫挿されたロータ軸(回転軸)18とを備えている。そして、回転子13は、ロータコア17の外周面がティース14と所定の間隔を置いた状態で、図示しないハウジングの軸受けにロータ軸18を介して回転可能に支持されている。ロータコア17には、ロータコア17を周方向に等分割(この実施形態では28分割)した各仮想領域に孔(フラックスバリア)が形成され、各孔内に断面略矩形の平板状に形成された永久磁石19が装着されている。各永久磁石19は、着磁方向(磁化方向)が厚さ方向となるように着磁されている。隣り合う永久磁石19は、回転子13の外周側が異なる極になるように、即ち、隣接する永久磁石19のN極及びS極が交互に固定子12側に向くように設けられている。この実施形態の同期回転電動機11は、固定子12のスロット数が24で、回転子13の磁極が28の構成になっている。なお、図1(a)において、永久磁石19の径方向内側に当該永久磁石19のN極及びS極のいずれが固定子12側に向くのかを示す符号N又はSを付した(符号の図示は一部省略)。
【0017】
したがって、この実施形態の同期回転電動機11は、次式で表わされる毎極毎相のスロット数qを計算すると1/2より小さい分数になり、同期回転電動機11は集中巻分数スロット埋込磁石同期モータとなる。
【0018】
q=Z1/(2Z2m)
但し、Z1はスロット数、Z2は極対数(磁極の数の1/2)、mは相数である。同期回転電動機11は、スロット数Z1が24、極対数Z2が14(28/2)、相数が3であるため、q=24/(2×14×3)=2/7で分数スロットになる。
【0019】
また、ロータコア17には、各永久磁石19よりロータ軸18寄りで隣り合う永久磁石19の中央と対向する位置に二次導体としてのバー導体20aがロータコア17を貫通するように設けられている。図2に示すように、各バー導体20aの両端部はそれぞれエンドリング20bに接続され、全体としてかご型の二次導体20が回転子13に一体回転可能に固定されている。
【0020】
次に前記のように構成された同期回転電動機11を車両に搭載される走行用モータに適用した場合の作用を説明する。図3に示すように、同期回転電動機11の制御装置21は、直流電源としてのバッテリ22の直流電力をインバータ23で3相交流に変換して、同期回転電動機11の各相(U相,V相,W相)の巻線16u,16v,16wに供給すべき交流電流を供給するようにインバータ23を制御する。各相に供給される電流は電流センサ24で検出されて、その検出信号が制御装置21に入力される。また、同期回転電動機11には回転子13の位置(磁極の位置)を検出する位置検出手段としての位置センサ25が設けられ、その検出信号が制御装置21に入力される。位置センサ25には、例えば、レゾルバやロータリエンコーダが使用される。
【0021】
制御装置21はCPU26及びメモリ27を備え、アクセルの踏み角等のデータ及び位置センサ25の検出信号に基づいて目的車速となるように各相の巻線16u,16v,16wに供給すべき交流電流量及び周波数を演算して、その交流電流が各相の巻線16u,16v,16wに供給されるようにインバータ23を制御する。制御装置21は低回転領域(低速領域)から高回転領域(高速領域)の全回転領域で常に同期運転を行うように、位置センサ25による回転子13の位置情報に基づいて同期制御によりインバータ23を制御して同期回転電動機11を駆動制御する。
【0022】
固定子12のU相巻線16u、V相巻線16v、W相巻線16wに所定周波数の交流が供給されると固定子12に回転磁界が発生し、回転子13に回転磁界が作用する。そして、回転磁界と永久磁石19の磁束との間の磁気的な吸引力及び反発力により回転子13が回転磁界と同期して回転する。
【0023】
分数スロットモータは同期回転磁界成分以外にも多数の回転磁界を含み、その非同期回転磁界成分がロータコア17に挿入されたバー導体20aに作用して誘導トルクを発生させ、バー導体20aがない場合に比べて全回転領域でトルクアップされる。
【0024】
以下、バー導体20aにより回転方向と同方向の正トルクが発生する理由を説明する。空間起磁力分布はU相、V相及びW相の空間起磁力分布を合成して成り立っている。1スロットで誘起される起磁力Fは巻線のターン数をN、電機子電流をIとすると、F=NIと定義されている。固定子12に発生する空間起磁力分布の座標定義を図4のように定め、定義にしたがってU相巻線の単層巻起磁力分布を図5に示す。図5より24スロット単層巻でのU相起磁力分布は次のようになる。
【0025】
【数1】

フーリエ級数展開は一般的に次式で与えられる。
【0026】
【数2】
係数an,bnは次式で示される。
【0027】
【数3】
したがって、以上の条件からU相の起磁力分布FU(θm)は次式で表すことができる。θmは機械角。
【0028】
【数4】
このとき、n=4k−2(k=1,2,3…)である。V相、W相の起磁力分布はU相の起磁力分布の位相を±2π/3ずらすことによって得られる。したがって、V相、W相の起磁力分布FV(θm)、FW(θm)は次式で表される。
【0029】
【数5】
このとき、IU,IV,IWは次式で表される。
【0030】
【数6】
βは電流位相角、ωSは電源角速度であり、ωrt=14θmで表される。FU(θm)、FV(θm)、FW(θm)にそれぞれ各相電流を代入し、足し合わせて合成することによってkごとの空間起磁力成分Fk(θm)は次式で表される。
【0031】
【数7】
このとき、Fkは起磁力の振幅、skはすべりとする。また、tを自然数としてδkはk=3tのとき+、k=3t−2のとき−の符号を表し、k=3t−1のときFk(θm)は零になる。起磁力の振幅を定数と変数に分離し、Fk=ANIとする。但し、Aを起磁力振幅係数とする。kに対するすべりskと起磁力振幅係数Aとの関係を表1に示す。
【0032】
【表1】
表1より空間起磁力分布がk=4のとき、すべりが0となり、回転磁界に対しロータが静止していることから、同期磁界として作用していることが確認できる。k=4以外の空間起磁力分布は、回転速度に対し回転速度の14θmと比較したときのすべりを導出して、すべりが0より大きく1未満であれば回転方向に対し正のトルクが出ると考えられる。その上で表1よりk=1のときすべりが6/7であり、正の誘導トルクが期待される。
【0033】
バー導体20aの有無による最大トルクの増加を3次元有限要素法解析(3D−FEM)により検証した。その結果、バー導体20aが無い場合の最大トルクを1とした場合に対して、バー導体20aが有る場合の最大トルクは1.07になった。比較のため、バー導体20aを挿入するための孔のみを形成してバー導体20aを挿入せずに空気とした場合の最大トルクを求めたところ、最大トルクは1.01であった。即ち、バー導体20aを設けることによりトルクアップされることが確認された。
【0034】
また、電機子電流として正弦波状の電流を流した場合、バー導体20aに流れる電流は、図6に示すように、電源周期(1周期360°)を基準にすると、正トルクに寄与するk=1のすべりから計算される周期である420°と同一であることが確認された。
【0035】
この実施形態によれば、以下に示す効果を得ることができる。
(1)同期回転電動機11は、隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石19を有する回転子13を備え、U相巻線16u、V相巻線16v、W相巻線16wを集中巻とし、回転子13には一定間隔で設けられた永久磁石19より内径側に二次導体(バー導体20a)を配置した。したがって、全回転領域で常に同期運転を行うことにより、全回転領域において固定子12の回転磁界と、回転子13の永久磁石19の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0036】
(2)同期回転電動機11は、スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットとなるように構成されている。したがって、極数とスロット数を近づけることで極数とスロット数の最小公倍数が大きな組み合わせが実現できる。また、同相の固定子巻線に対応するティース14であってもティース14ごとに回転子13の永久磁石19との対向具合が異なる配置となり、スキューなしでもコギングトルクやトルクリプルを小さくすることができる。
【0037】
(3)同期回転電動機11は、スロット数が24、磁極数が28の3相交流電機である。したがって、一般に使用される3相回転電機において、トルクアップを図ることができる。
【0038】
(4)各巻線16u,16v,16wはそれぞれ単層巻で各ティース14に巻き付けられている。したがって、二層巻で巻き付けた場合に比べてバー導体20aにより正の誘導トルクが発生し易い。
【0039】
(5)同期回転電動機11は、回転子13の位置を検出する位置センサ25を備え、制御装置21は位置センサ25により検出される回転子13の位置情報に基づいて全回転領域において同期制御により同期回転電動機11を駆動制御する。したがって、位置センサ25を設けずに同期制御を行う場合に比べてCPU26による制御が簡単になる。
【0040】
(6)同期回転電動機11は、車両に搭載される走行用モータに適用されている。走行用モータは小型化が望まれているが、同期回転電動機11は全回転領域においてトルクアップされるため小型化に寄与する。また、走行用モータには一般に位置センサ25が設けられるため、位置センサ25を設けてもコストアップとはならない。
【0041】
実施形態は前記に限定されるものではなく、例えば、次のように具体化してもよい。
○ 同期回転電動機11は、固定子12のスロット数が24で、回転子13の磁極が28の構成に限らず、スロット数と磁極の組み合わせが24と28以外の分数スロットの3相電動機であってもよい。但し、分数スロットの3相電動機であって、スロット数と磁極の組み合わせによってはバー導体20aに作用する高調波成分による誘導トルクが正トルクにならず負トルク(回転子13の回転方向と反対方向のトルク)となる場合があるので、設計に際して空間起磁力成分Fk(θm)の式を用いてkに対するすべりを計算し、正の誘導トルクが期待される組み合わせを採用する必要がある。
【0042】
○ 同期回転電動機11は分数スロットに限らない。
○ 同期回転電動機11は埋込磁石型に限らず表面磁石型であってもよい。
○ 固定子巻線は二層巻であってもよい。
【0043】
○ バー導体20aは、永久磁石19と対向する位置で永久磁石19より内径側に設けたり、永久磁石19と同一円周上で永久磁石19の間に設けたりしてもよい。
○ バー導体20aは永久磁石19の数、即ち極数と同じ数ではなく、極数の自然数倍設けてもよい。例えば、永久磁石19の間に2本ずつ設けたり、永久磁石19間及び永久磁石19の内径側にそれぞれ1本ずつ設けたりしてもよい。
【0044】
○ 同期回転電動機11は回転子13の位置を検出する位置センサ25が設けられていないセンサレス型の電動機、例えば、電流と電圧から回転子速度と磁極位置とを演算してそれに基づいてベクトル制御を行う電動機であってもよい。
【0045】
○ 同期回転電動機11は回転子が固定子の外側に設けられるアウターロータタイプの電動機としてもよい。
○ 電動機ではなく発電機に適用してもよい。
【0046】
○ 予め試験により、バー導体20aに流れる電流に正の誘導トルクが発生する高調波成分が多く含まれる電機子電流の状態と、回転子13の回転速度との関係データを求めておき、その関係データに基づいて制御装置21が同期制御を行うようにしてもよい。
【0047】
以下の技術的思想(発明)は前記実施形態から把握できる。
(1)請求項1〜請求項3のいずれか1項に記載の発明において、前記固定子巻線は単層巻で巻き付けられている。
【0048】
(2)請求項1〜請求項3及び前記技術的思想(1)のいずれか1項に記載の発明において、同期回転電機には回転子の位置を検出するセンサが設けられ、センサで検出された位置情報に基づいて同期運転が行われる。
【符号の説明】
【0049】
13…回転子、16u…固定子巻線としてのU相巻線、16v…同じくV相巻線、16w…同じくW相巻線、19…永久磁石、20a…二次導体としてのバー導体。
【技術分野】
【0001】
本発明は、同期回転電機に係り、詳しくは回転子(ロータ)に永久磁石が設けられた同期回転電機に関する。
【背景技術】
【0002】
回転子に永久磁石を有する同期モータは、固定子に設けられた固定子巻線の回転磁界と回転子の永久磁石の磁束との相互作用によって回転子が回転磁界と同期速度で回転する。各相の固定子巻線のインダクタンスは回転子の回転位置に応じて変化し、回転子の回転に伴って固定子巻線のインダクタンスが増加するときに固定子巻線に励磁電流を供給すると、回転子を回転方向に回転させるトルク(正トルク)が発生する。一方、回転子の回転に伴って固定子巻線のインダクタンスが減少するときに固定子巻線に励磁電流を供給すると、回転子を回転方向と反対方向に回転させるトルク(負トルク)が発生する。そして、回転子の位置に対応して各相の固定子巻線への励磁電流の供給タイミングを制御する(例えば、特許文献1参照。)。
【0003】
また、永久磁石式回転電機として、回転子に永久磁石の他に始動巻線を形成する導体を備えたものがある(例えば、特許文献2参照)。特許文献2に開示された回転電機は、図7に示すように、回転子51に複数の第1永久磁石52と、第1永久磁石52の間に第1永久磁石52と同じ極性を電機子としての固定子53に向け、固定子53から見た背面までの距離を第1永久磁石52よりも小さくなるように配置した第2永久磁石54とから成る界磁極が設けられている。界磁極の間及び第2永久磁石54の背面側に始動巻線を構成する導体55が設けられている。始動巻線を設けた永久磁石式同期電機では、非同期制御で始動された後、同期制御となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−278989号公報
【特許文献2】特開昭57−145556号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
回転電機は小型化が望まれており、同じ消費電力においてトルクアップを図ることができれば回転電機の小型化も容易になる。しかし、特許文献1のように固定子の回転磁界と回転子の永久磁石の磁束との相互作用だけによって回転子を回転させる構成では、トルクアップを図るには消費電力が多くなる。
【0006】
一方、特許文献2は始動巻線を設けることにより、非同期運転時である始動時のトルクは大きくなる。しかし、始動巻線を構成する導体55は始動トルクを得るためのものであり、同期運転時のトルクアップに関しては何ら考慮されていない。
【0007】
本発明は前記の問題に鑑みてなされたものであって、その目的は、全回転領域において固定子の回転磁界と回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる同期回転電機を提供することにある。
【課題を解決するための手段】
【0008】
前記の目的を達成するため、請求項1に記載の発明は、隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石を有する回転子を備えた同期回転電機であって、固定子巻線を集中巻とし、前記回転子には前記永久磁石より内径側又は前記永久磁石間に二次導体を配置した。
【0009】
従来、二次導体を備えた永久磁石式同期回転電機はあるが、二次導体は始動トルクを得るために設けられており、始動時には非同期制御で運転が開始され、その後同期運転に移行される。一方、この発明の回転電機を、始動時から常に同期制御で運転すると、始動時以外の同期運転時にも、空間起磁力分布の高調波成分の一部が二次導体に作用することにより、二次導体から回転子の回転方向に対して正の誘導トルクが発生する。そして、固定子巻線が集中巻のため、分布巻に比べて高調波成分が多い。したがって、全回転領域において固定子の回転磁界と、回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0010】
請求項2に記載の発明は、請求項1に記載の発明において、回転電機は全回転領域で同期運転を行う。したがって、全回転領域において固定子の回転磁界と、回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0011】
請求項3に記載の発明は、請求項1又は2に記載の発明において、スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである。分数スロットでは極数とスロット数を近づけることで極数とスロット数の最小公倍数が大きな組み合わせが実現できる。また、同相の固定子巻線に対応するティースであっても、ティースごとに回転子の永久磁石との対向具合が異なる配置となり、スキューなしでもコギングトルクやトルクリプルを小さくすることができる。
【0012】
請求項4に記載の発明は、請求項3に記載の発明において、前記スロット数が24、磁極数が28の3相交流電機である。したがって、一般に使用される3相回転電機において、トルクアップを図ることができる。
【発明の効果】
【0013】
本発明によれば、全回転領域において固定子の回転磁界と回転子の永久磁石の磁束との相互作用により発生するトルクよりトルクアップを図ることができる同期回転電機を提供することができる。
【図面の簡単な説明】
【0014】
【図1】(a)は同期回転電動機の模式断面図、(b)は(a)の部分拡大図。
【図2】二次導体の斜視図。
【図3】同期回転電動機の制御構成を示すブロック図。
【図4】起磁力座標の定義を示す模式図。
【図5】U相単層巻起磁力分布を示す図。
【図6】二次導体に流れる電流を示す図。
【図7】従来技術の断面図。
【発明を実施するための形態】
【0015】
以下、本発明を3相の同期回転電動機に具体化した一実施形態を図1〜図6にしたがって説明する。
図1(a)に示すように、同期回転電動機11は、円筒状の固定子(ステータ)12及び固定子12の内側に配置された回転子13を備えている。固定子12は、内側に複数のティース14が等間隔になるようにスロット15が等間隔で設けられている。この実施形態ではティース14及びスロット15がそれぞれ24個設けられている。ティース14には、固定子巻線としてのU相巻線16u、V相巻線16v、W相巻線16wがそれぞれ集中巻で巻回されている。U相巻線16u、V相巻線16v、W相巻線16wは、図1において時計方向にU相、V相、W相の順で配置されるように、かつ、同相の巻線が直列で各ティース14に巻き付けられた巻線の巻き付け方向がティース14毎に交互に反対方向となるように単層巻で巻き付けられている。即ち、U相巻線16u、V相巻線16v、W相巻線16wにそれぞれ電流が供給された際、同相の巻線が巻き付けられたティース14の起磁力の向きが交互に反対方向となるように巻き付けられている。
【0016】
回転子13は、円板状の電磁鋼板を複数枚(例えば、数十枚)積層したロータコア17と、ロータコア17の中心に貫挿されたロータ軸(回転軸)18とを備えている。そして、回転子13は、ロータコア17の外周面がティース14と所定の間隔を置いた状態で、図示しないハウジングの軸受けにロータ軸18を介して回転可能に支持されている。ロータコア17には、ロータコア17を周方向に等分割(この実施形態では28分割)した各仮想領域に孔(フラックスバリア)が形成され、各孔内に断面略矩形の平板状に形成された永久磁石19が装着されている。各永久磁石19は、着磁方向(磁化方向)が厚さ方向となるように着磁されている。隣り合う永久磁石19は、回転子13の外周側が異なる極になるように、即ち、隣接する永久磁石19のN極及びS極が交互に固定子12側に向くように設けられている。この実施形態の同期回転電動機11は、固定子12のスロット数が24で、回転子13の磁極が28の構成になっている。なお、図1(a)において、永久磁石19の径方向内側に当該永久磁石19のN極及びS極のいずれが固定子12側に向くのかを示す符号N又はSを付した(符号の図示は一部省略)。
【0017】
したがって、この実施形態の同期回転電動機11は、次式で表わされる毎極毎相のスロット数qを計算すると1/2より小さい分数になり、同期回転電動機11は集中巻分数スロット埋込磁石同期モータとなる。
【0018】
q=Z1/(2Z2m)
但し、Z1はスロット数、Z2は極対数(磁極の数の1/2)、mは相数である。同期回転電動機11は、スロット数Z1が24、極対数Z2が14(28/2)、相数が3であるため、q=24/(2×14×3)=2/7で分数スロットになる。
【0019】
また、ロータコア17には、各永久磁石19よりロータ軸18寄りで隣り合う永久磁石19の中央と対向する位置に二次導体としてのバー導体20aがロータコア17を貫通するように設けられている。図2に示すように、各バー導体20aの両端部はそれぞれエンドリング20bに接続され、全体としてかご型の二次導体20が回転子13に一体回転可能に固定されている。
【0020】
次に前記のように構成された同期回転電動機11を車両に搭載される走行用モータに適用した場合の作用を説明する。図3に示すように、同期回転電動機11の制御装置21は、直流電源としてのバッテリ22の直流電力をインバータ23で3相交流に変換して、同期回転電動機11の各相(U相,V相,W相)の巻線16u,16v,16wに供給すべき交流電流を供給するようにインバータ23を制御する。各相に供給される電流は電流センサ24で検出されて、その検出信号が制御装置21に入力される。また、同期回転電動機11には回転子13の位置(磁極の位置)を検出する位置検出手段としての位置センサ25が設けられ、その検出信号が制御装置21に入力される。位置センサ25には、例えば、レゾルバやロータリエンコーダが使用される。
【0021】
制御装置21はCPU26及びメモリ27を備え、アクセルの踏み角等のデータ及び位置センサ25の検出信号に基づいて目的車速となるように各相の巻線16u,16v,16wに供給すべき交流電流量及び周波数を演算して、その交流電流が各相の巻線16u,16v,16wに供給されるようにインバータ23を制御する。制御装置21は低回転領域(低速領域)から高回転領域(高速領域)の全回転領域で常に同期運転を行うように、位置センサ25による回転子13の位置情報に基づいて同期制御によりインバータ23を制御して同期回転電動機11を駆動制御する。
【0022】
固定子12のU相巻線16u、V相巻線16v、W相巻線16wに所定周波数の交流が供給されると固定子12に回転磁界が発生し、回転子13に回転磁界が作用する。そして、回転磁界と永久磁石19の磁束との間の磁気的な吸引力及び反発力により回転子13が回転磁界と同期して回転する。
【0023】
分数スロットモータは同期回転磁界成分以外にも多数の回転磁界を含み、その非同期回転磁界成分がロータコア17に挿入されたバー導体20aに作用して誘導トルクを発生させ、バー導体20aがない場合に比べて全回転領域でトルクアップされる。
【0024】
以下、バー導体20aにより回転方向と同方向の正トルクが発生する理由を説明する。空間起磁力分布はU相、V相及びW相の空間起磁力分布を合成して成り立っている。1スロットで誘起される起磁力Fは巻線のターン数をN、電機子電流をIとすると、F=NIと定義されている。固定子12に発生する空間起磁力分布の座標定義を図4のように定め、定義にしたがってU相巻線の単層巻起磁力分布を図5に示す。図5より24スロット単層巻でのU相起磁力分布は次のようになる。
【0025】
【数1】
フーリエ級数展開は一般的に次式で与えられる。
【0026】
【数2】
係数an,bnは次式で示される。
【0027】
【数3】
したがって、以上の条件からU相の起磁力分布FU(θm)は次式で表すことができる。θmは機械角。
【0028】
【数4】
このとき、n=4k−2(k=1,2,3…)である。V相、W相の起磁力分布はU相の起磁力分布の位相を±2π/3ずらすことによって得られる。したがって、V相、W相の起磁力分布FV(θm)、FW(θm)は次式で表される。
【0029】
【数5】
このとき、IU,IV,IWは次式で表される。
【0030】
【数6】
βは電流位相角、ωSは電源角速度であり、ωrt=14θmで表される。FU(θm)、FV(θm)、FW(θm)にそれぞれ各相電流を代入し、足し合わせて合成することによってkごとの空間起磁力成分Fk(θm)は次式で表される。
【0031】
【数7】
このとき、Fkは起磁力の振幅、skはすべりとする。また、tを自然数としてδkはk=3tのとき+、k=3t−2のとき−の符号を表し、k=3t−1のときFk(θm)は零になる。起磁力の振幅を定数と変数に分離し、Fk=ANIとする。但し、Aを起磁力振幅係数とする。kに対するすべりskと起磁力振幅係数Aとの関係を表1に示す。
【0032】
【表1】
表1より空間起磁力分布がk=4のとき、すべりが0となり、回転磁界に対しロータが静止していることから、同期磁界として作用していることが確認できる。k=4以外の空間起磁力分布は、回転速度に対し回転速度の14θmと比較したときのすべりを導出して、すべりが0より大きく1未満であれば回転方向に対し正のトルクが出ると考えられる。その上で表1よりk=1のときすべりが6/7であり、正の誘導トルクが期待される。
【0033】
バー導体20aの有無による最大トルクの増加を3次元有限要素法解析(3D−FEM)により検証した。その結果、バー導体20aが無い場合の最大トルクを1とした場合に対して、バー導体20aが有る場合の最大トルクは1.07になった。比較のため、バー導体20aを挿入するための孔のみを形成してバー導体20aを挿入せずに空気とした場合の最大トルクを求めたところ、最大トルクは1.01であった。即ち、バー導体20aを設けることによりトルクアップされることが確認された。
【0034】
また、電機子電流として正弦波状の電流を流した場合、バー導体20aに流れる電流は、図6に示すように、電源周期(1周期360°)を基準にすると、正トルクに寄与するk=1のすべりから計算される周期である420°と同一であることが確認された。
【0035】
この実施形態によれば、以下に示す効果を得ることができる。
(1)同期回転電動機11は、隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石19を有する回転子13を備え、U相巻線16u、V相巻線16v、W相巻線16wを集中巻とし、回転子13には一定間隔で設けられた永久磁石19より内径側に二次導体(バー導体20a)を配置した。したがって、全回転領域で常に同期運転を行うことにより、全回転領域において固定子12の回転磁界と、回転子13の永久磁石19の磁束との相互作用により発生するトルクよりトルクアップを図ることができる。
【0036】
(2)同期回転電動機11は、スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットとなるように構成されている。したがって、極数とスロット数を近づけることで極数とスロット数の最小公倍数が大きな組み合わせが実現できる。また、同相の固定子巻線に対応するティース14であってもティース14ごとに回転子13の永久磁石19との対向具合が異なる配置となり、スキューなしでもコギングトルクやトルクリプルを小さくすることができる。
【0037】
(3)同期回転電動機11は、スロット数が24、磁極数が28の3相交流電機である。したがって、一般に使用される3相回転電機において、トルクアップを図ることができる。
【0038】
(4)各巻線16u,16v,16wはそれぞれ単層巻で各ティース14に巻き付けられている。したがって、二層巻で巻き付けた場合に比べてバー導体20aにより正の誘導トルクが発生し易い。
【0039】
(5)同期回転電動機11は、回転子13の位置を検出する位置センサ25を備え、制御装置21は位置センサ25により検出される回転子13の位置情報に基づいて全回転領域において同期制御により同期回転電動機11を駆動制御する。したがって、位置センサ25を設けずに同期制御を行う場合に比べてCPU26による制御が簡単になる。
【0040】
(6)同期回転電動機11は、車両に搭載される走行用モータに適用されている。走行用モータは小型化が望まれているが、同期回転電動機11は全回転領域においてトルクアップされるため小型化に寄与する。また、走行用モータには一般に位置センサ25が設けられるため、位置センサ25を設けてもコストアップとはならない。
【0041】
実施形態は前記に限定されるものではなく、例えば、次のように具体化してもよい。
○ 同期回転電動機11は、固定子12のスロット数が24で、回転子13の磁極が28の構成に限らず、スロット数と磁極の組み合わせが24と28以外の分数スロットの3相電動機であってもよい。但し、分数スロットの3相電動機であって、スロット数と磁極の組み合わせによってはバー導体20aに作用する高調波成分による誘導トルクが正トルクにならず負トルク(回転子13の回転方向と反対方向のトルク)となる場合があるので、設計に際して空間起磁力成分Fk(θm)の式を用いてkに対するすべりを計算し、正の誘導トルクが期待される組み合わせを採用する必要がある。
【0042】
○ 同期回転電動機11は分数スロットに限らない。
○ 同期回転電動機11は埋込磁石型に限らず表面磁石型であってもよい。
○ 固定子巻線は二層巻であってもよい。
【0043】
○ バー導体20aは、永久磁石19と対向する位置で永久磁石19より内径側に設けたり、永久磁石19と同一円周上で永久磁石19の間に設けたりしてもよい。
○ バー導体20aは永久磁石19の数、即ち極数と同じ数ではなく、極数の自然数倍設けてもよい。例えば、永久磁石19の間に2本ずつ設けたり、永久磁石19間及び永久磁石19の内径側にそれぞれ1本ずつ設けたりしてもよい。
【0044】
○ 同期回転電動機11は回転子13の位置を検出する位置センサ25が設けられていないセンサレス型の電動機、例えば、電流と電圧から回転子速度と磁極位置とを演算してそれに基づいてベクトル制御を行う電動機であってもよい。
【0045】
○ 同期回転電動機11は回転子が固定子の外側に設けられるアウターロータタイプの電動機としてもよい。
○ 電動機ではなく発電機に適用してもよい。
【0046】
○ 予め試験により、バー導体20aに流れる電流に正の誘導トルクが発生する高調波成分が多く含まれる電機子電流の状態と、回転子13の回転速度との関係データを求めておき、その関係データに基づいて制御装置21が同期制御を行うようにしてもよい。
【0047】
以下の技術的思想(発明)は前記実施形態から把握できる。
(1)請求項1〜請求項3のいずれか1項に記載の発明において、前記固定子巻線は単層巻で巻き付けられている。
【0048】
(2)請求項1〜請求項3及び前記技術的思想(1)のいずれか1項に記載の発明において、同期回転電機には回転子の位置を検出するセンサが設けられ、センサで検出された位置情報に基づいて同期運転が行われる。
【符号の説明】
【0049】
13…回転子、16u…固定子巻線としてのU相巻線、16v…同じくV相巻線、16w…同じくW相巻線、19…永久磁石、20a…二次導体としてのバー導体。
【特許請求の範囲】
【請求項1】
隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石を有する回転子を備えた同期回転電機であって、
固定子巻線を集中巻とし、前記回転子には前記永久磁石より内径側又は前記永久磁石間に二次導体を配置したことを特徴とする同期回転電機。
【請求項2】
全回転領域で同期運転を行うことを特徴とする請求項1に記載の同期回転電機。
【請求項3】
スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである請求項1又は2に記載の同期回転電機。
【請求項4】
前記スロット数が24、磁極数が28の3相交流電機である請求項3に記載の同期回転電機。
【請求項1】
隣り合う永久磁石の磁極が交互に異なるように配置された複数の永久磁石を有する回転子を備えた同期回転電機であって、
固定子巻線を集中巻とし、前記回転子には前記永久磁石より内径側又は前記永久磁石間に二次導体を配置したことを特徴とする同期回転電機。
【請求項2】
全回転領域で同期運転を行うことを特徴とする請求項1に記載の同期回転電機。
【請求項3】
スロット数をZ1、極対数をZ2、相数をmとした場合にq=Z1/(2Z2m)で表わされる毎極毎相のスロット数qが1/2より小さい分数スロットである請求項1又は2に記載の同期回転電機。
【請求項4】
前記スロット数が24、磁極数が28の3相交流電機である請求項3に記載の同期回転電機。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−175752(P2012−175752A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33229(P2011−33229)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]