
向き推定方法、向き推定装置及び端末装置
【課題】利用者の向きを推定することを課題とする。
【解決手段】向き推定サーバ10は、利用者によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、向き推定サーバ10は、利用者の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、第2の地点における利用者の向きを推定する。
【解決手段】向き推定サーバ10は、利用者によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、向き推定サーバ10は、利用者の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、第2の地点における利用者の向きを推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、向き推定方法、向き推定装置及び端末装置に関する。
【背景技術】
【0002】
利用者によって携帯される端末装置に搭載された各種のセンサの出力を用いて利用者の行動を推定する技術が知られている。例えば、GPS受信機、モーションセンサやRFIDタグから採取される位置情報から利用者の現在位置を特定したり、位置情報を時系列に蓄積することにより利用者の移動軌跡を特定したりすることができる。なお、上記の「GPS」は、「Global Positioning System」の略称であり、また、「RFID」は、「Radio Frequency Identification」の略称である。
【0003】
これら利用者の現在位置や移動軌跡を推定する技術の他にも、利用者が向いている方向を推定する技術がある。かかる利用者の向きを推定する技術の一例としては、歩行者の現在位置と向きを基準に目的地までの経路案内または経路誘導を行う歩行者ナビゲーション方法が挙げられる。この歩行者ナビゲーション方法では、歩行者が携帯電話を手に持って操作したり表示を見る状態を想定し、携帯電話の背面方向または上部方向を歩行者の向きと仮定する。このような仮定の下、歩行者ナビゲーションサーバは、磁気方位センサによって測定された携帯電話が向いている方向を上とし、現在位置を基準とした目的地の方向と目的地までの距離を携帯電話に表示させる。
【0004】
このようにして推定された利用者の行動は、利用者へのナビゲーションに利用される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−58057号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記の従来技術は、歩行者を経路案内または経路誘導するという限定的な場面で歩行者の向きを推定しようとするものに過ぎず、利用者と端末装置の関係が既知でなければ利用者の向きを推定することはできない。
【0007】
すなわち、携帯電話は、歩行者によって常時使用される訳ではなく、むしろ鞄や着衣のポケットなどに収納された状態で携帯されるのが一般的である。ところが、鞄や着衣のポケットなどに収納された状態で携帯された場合には、そもそも歩行者が携帯電話を手に持って操作したり表示を見るという上記の歩行者ナビゲーション方法の仮定が成立しない。このように、上記の歩行者ナビゲーション方法では、利用者と端末装置の関係が既知でなければ利用者の向きを推定することはできない。例えば、利用者が移動する過程でどのような広告に興味を持ったかを収集するといったモニタリングにも利用される場合に、利用者と端末装置の関係が既知でなければ広告に対する利用者の興味を収集するのに適用することはできない。
【0008】
開示の技術は、上記に鑑みてなされたものであって、利用者の向きを推定できる向き推定方法、向き推定装置及び端末装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本願の開示する向き推定方法は、コンピュータが、利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録する処理を実行する。さらに、前記コンピュータが、前記利用者の向きを特定可能な第1の地点における利用者の向きを特定する処理を実行する。さらに、前記コンピュータが、前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する処理を実行する。
【発明の効果】
【0010】
本願の開示する向き推定方法の一つの態様によれば、利用者の向きを推定できるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る向き推定システムの構成を示す図である。
【図2】図2は、実施例1に係る向き推定システムに含まれる各装置の構成を示す機能ブロック図である。
【図3】図3は、加速度データの構成例を示す図である。
【図4】図4は、相対方位角データの構成例を示す図である。
【図5】図5は、通過履歴データの構成例を示す図である。
【図6】図6は、方位データの構成例を示す図である。
【図7】図7は、推定結果データの一例を示す図である。
【図8】図8は、プラットホームにおける利用者の移動軌跡を模式化した図である。
【図9】図9は、図8に示した利用者の移動軌跡における相対方位角と時刻の関係を示すグラフである。
【図10】図10は、実施例1に係る特定処理の手順を示すフローチャートである。
【図11】図11は、実施例1に係る推定処理の手順を示すフローチャートである。
【図12】図12は、実施例1及び実施例2に係る向き推定プログラムを実行するコンピュータの一例について説明するための図である。
【発明を実施するための形態】
【0012】
以下に、本願の開示する向き推定方法、向き推定装置及び端末装置の実施例を図面に基づいて詳細に説明する。なお、この実施例は開示の技術を限定するものではない。そして、各実施例は、処理内容を矛盾させない範囲で適宜組み合わせることが可能である。
【実施例1】
【0013】
[システム構成]
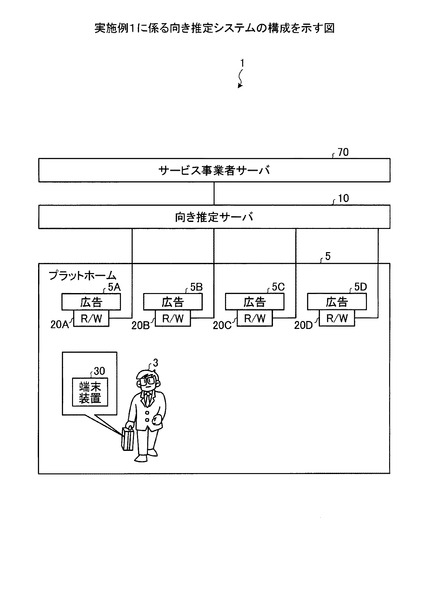
まず、本実施例に係る向き推定システムの構成について説明する。図1は、実施例1に係る向き推定システムの構成を示す図である。図1に示す向き推定システム1には、向き推定サーバ10と、R/W20A〜20Dと、端末装置30と、サービス事業者サーバ70とが収容される。なお、図1の例では、プラットホーム5に設置された広告5A〜5Dへの接近がR/W20A〜20Dにより検知された端末装置30を携帯する利用者3がいずれの方向を向いているのかを推定する場合を想定する。
【0014】
これらR/W20A〜20Dまたはサービス事業者サーバ70と向き推定サーバ10との間は、任意のネットワークを介して通信可能に接続される。かかるネットワークの一例としては、有線または無線を問わず、インターネット(Internet)、LAN(Local Area Network)やVPN(Virtual Private Network)などの通信網が挙げられる。一方、端末装置30と向き推定サーバ10との間は、一例として、携帯電話網等を介して通信可能に接続される。なお、以下では、R/W20A〜R/W20Dの各装置を区別なく説明する場合には「R/W20」と総称し、広告5A〜広告5Dの各広告を区別なく説明する場合には「広告5」と総称する場合がある。
【0015】
R/W20は、後述する端末装置30に内蔵されたICタグ(Integrated Circuit)31との間で通信を行ってICタグ31内の記録情報の読取または書込を行う装置である。このR/W20は、密接型、近接型または近傍型の仕様で定められた通信の有効距離とした電磁波を発射する。この電磁波を用いて、端末装置30のICタグ31に組み込まれたコイル式のアンテナにより発電が行われてデータ通信が可能となる。その上で、R/W20は、端末装置30のICタグ31に記録された情報、例えば端末装置30を識別する端末ID(Identification)を読み取り、読み取った端末IDを自装置が設置された位置を識別する位置IDとともに向き推定サーバ10へ送信する。
【0016】
一例として、R/W20は、図1に示すように、プラットホーム5の広告5A〜5Dと一対一に対応付けて設けられる。このため、R/W20A〜R/W20Dのいずれかによって端末IDが読み取られた場合には、端末IDを読み取ったR/W20が取り付けられている広告5に端末装置30を携帯する利用者3が接近したことを検知できる。なお、図1の例では、4つの広告5A〜5Dが設置されている場合を例示したが、開示のシステムは、単数を含む任意の広告が設置される場合に適用できる。また、図1の例では、広告とR/Wを一対一に対応付けて設ける場合を例示したが、複数の広告につき1つのR/Wを設けることとしてもかまわない。
【0017】
端末装置30は、利用者3によって携帯される情報処理装置である。かかる端末装置30の一態様としては、スマートフォンを始め、携帯電話、PHS(Personal Handyphone System)やPDA(Personal Digital Assistant)などを採用できる。なお、図1の例では、端末装置30が利用者3の鞄の中に収納された状態で携帯される場合を想定するが、端末装置30の携帯方法はこれに限定されない。すなわち、開示のシステムは、端末装置30の携帯方法は1つの仮定に限定されず、ポケットの中に収納されるなどのように他の状態で携帯される場合にも、後述の利用者の向き推定方法を同様に適用される。また、図1の例では、端末装置30を1つだけ例示したが、端末装置30は1つである必要はなく、開示のシステムには、複数の端末装置30を収容することができる。
【0018】
また、端末装置30は、後述するICタグ31を搭載し、R/W20との間で端末装置30の端末IDなどのデータ通信を実行する。さらに、端末装置30は、後述するモーションセンサ33を搭載し、モーションセンサ33によって出力されたセンサ値を向き推定サーバ10へアップロードする。かかるモーションセンサ33の一態様としては、後述する加速度センサ33Aや角速度センサ33Bなどを採用できる。このとき、端末装置30は、モーションセンサ33の出力を逐次送信することもできるし、通信トラヒックを抑制するために、一定期間にわたって蓄積したセンサ値をまとめて送信することもできる。
【0019】
なお、ここでは、端末装置30がICタグ31やモーションセンサ33を搭載する場合を例示したが、開示の端末装置30には、上記のセンサ以外にも各種のセンサを搭載することができる。例えば、開示の端末装置30は、相対方位角を測定する角速度センサ33Bに代えて絶対方位を測定する地磁気センサを採用することもできるし、これらの両方を搭載することもできる。また、開示の端末装置30は、端末装置30の位置を検出するセンサとしてICタグ31に代えてGPS(Global Positioning System)センサを採用することもできるし、これらの両方を搭載することもできる。なお、本実施例では、3軸モーションセンサや3軸地磁気センサにより、または、これらのセンサの履歴により、地面に対する垂直方向または水平面を特定することができる。これにより、本実施例では、端末装置の姿勢を推定することが可能となり、本実施例で用いる相対方位角とは、この推定された水平面における相対方位角を表す。
【0020】
向き推定サーバ10は、プラットホーム5に設置された広告5A〜5Dに接近した利用者3がいずれの方向を向いているのかを推定するサービスを提供するコンピュータである。一例としては、向き推定サーバ10は、広告5A〜5Dに設置されたR/W20A〜20DのいずれかのR/W20から位置ID及び端末IDを受信した場合に、広告5の近辺で端末装置30を携帯する利用者3が向いている方向を推定する。その上で、向き推定サーバ10は、広告5の位置ID、日時や利用者の向きなどの推定結果をサービス事業者サーバ70へ送信する。
【0021】
ここで、本実施例に係る向き推定サーバ10は、利用者3によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、本実施例に係る向き推定サーバ10は、利用者3の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、本実施例に係る向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者3の向きとを用いて、第2の地点における利用者3の向きを推定する。
【0022】
このように、本実施例に係る向き推定サーバ10では、利用者3が接近した広告5の所在位置である第2の地点における利用者3の向きを特定するのに、ヒューリステックにより利用者3の向きを既知とできる第1の地点における利用者の向きを使用する。それゆえ、本実施例に係る向き推定サーバ10では、利用者3と端末装置30の関係を特定の位置関係に限定せずとも、第1の地点に対応する相対方位角および第2の地点の相対方位角との演算により第2の地点における利用者の向きを推定できる。
【0023】
よって、本実施例に係る向き推定サーバ10によれば、利用者3と端末装置30の関係が既知でなくとも、第2の地点における利用者の向きを推定できる。さらに、本実施例に係る向き推定サーバ10では、広告5に設置されたカメラを用いて利用者3の向きを推定する場合よりも費用を抑えて利用者3の向きを推定できる。
【0024】
サービス事業者サーバ70は、広告5に関連する各種のサービスを提供する事業者によって運営されるコンピュータである。一例としては、サービス事業者サーバ70は、向き推定サーバ10から受信した推定結果をもとに、広告5の方向に向いていた利用者3、すなわち広告5に興味を持った利用者3を特定する。他の一例としては、サービス事業者サーバ70は、広告5を通過した各々の利用者3の向きを地図上にマッピングしたり、広告5に興味を持った利用者3を集計することにより広告5の効果を分析したりする。更なる一例としては、サービス事業者サーバ70は、広告5に興味を持った利用者3に広告に関連するサービスのメールを送信したりする。
【0025】
[端末装置30の構成]
続いて、本実施例に係る端末装置30の機能的構成について説明する。図2は、実施例1に係る向き推定システムに含まれる各装置の構成を示す機能ブロック図である。図2に示すように、端末装置30は、ICタグ31と、モーションセンサ33とを有する。なお、端末装置30は、図2に示した機能部以外にも既知の端末装置が有する各種の機能部、例えば各種の入力デバイスや音声出力デバイスなどを始め、キャリアによる通信を実行する機能部やアプリケーションプログラムを実行する機能部を有するものとする。
【0026】
ICタグ31は、ICチップとコイル式のアンテナとを内蔵するRFIDタグである。一例としては、ICタグ31は、R/W20から発射された電磁波が供給されると、コイル式のアンテナにより発電し、その電力を用いてICチップに記録された情報、例えば端末IDをR/W20へ送信する。なお、端末IDには、端末装置30の電話番号やSIMカード(Subscriber Identity Module)のID番号などの任意の識別子を採用できる。
【0027】
モーションセンサ33は、端末装置30の動きを計測するセンサである。このモーションセンサ33は、図2に示すように、加速度センサ33Aと、角速度センサ33Bとを有する。なお、図2の例では、加速度センサ33A及び角速度センサ33Bを有する場合を例示したが、必ずしも2つのセンサである必要はなく、さらに地磁気センサや速度センサを有することとしてもよい。
【0028】
このうち、加速度センサ33Aは、端末装置30の加速度を計測するセンサである。かかる加速度センサ33Aの一態様としては、X軸方向、Y軸方向、Z軸方向の加速度を計測する3軸加速度センサを採用できる。このように加速度センサ33Aによって計測される3軸方向のセンサ値は、図示しないA/D変換器によってデジタル値に変換された後に向き推定サーバ10へ送信される。なお、加速度の計測方式には、半導体式を始め、機械式や光学式などの任意の方式を採用できる。
【0029】
角速度センサ33Bは、端末装置30の角速度を計測するセンサである。かかる角速度センサ33Bの一態様としては、X軸周り、Y軸周り、Z軸周りの加速度を計測する3軸ジャイロスコープを採用できる。このように角速度センサ33Bによって計測される3軸周りのセンサ値は、図示しないA/D変換器によってデジタル値に変換された後に向き推定サーバ10へ送信される。なお、角速度の計測方式には、振動型を始め、回転型などの任意の方式を採用できる。
【0030】
[向き推定サーバ10の構成]
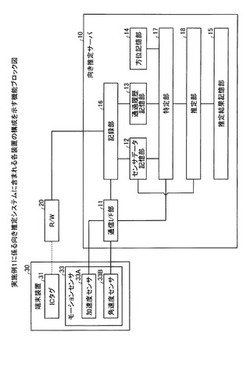
次に、本実施例に係る向き推定サーバ10の機能的構成について説明する。図2に示すように、向き推定サーバ10は、通信I/F(interface)部11と、センサデータ記憶部12と、通過履歴記憶部13と、方位記憶部14と、推定結果記憶部15とを有する。さらに、向き推定サーバ10は、記録部16と、特定部17と、推定部18とを有する。なお、向き推定サーバ10は、図2に示した機能部以外にも既知のコンピュータが有する各種の機能部、例えば各種の入力デバイスや音声出力デバイスなどの機能部を有するものとする。
【0031】
通信I/F部11は、他の装置、例えばR/W20やサービス事業者サーバ70との間で通信制御を行うインタフェースである。一例としては、通信I/F部11は、R/W20から位置ID及び端末IDを受信したり、端末装置30からモーションセンサ33のセンサ値を受信したりする。他の一例としては、通信I/F部11は、後述の推定部18によって利用者3の向きが推定された推定結果をサービス事業者サーバ70へ送信したりする。かかる通信I/F部11の一態様としては、LANカードなどのネットワークインタフェースカード(NIC:Network Interface Card)やモデムを採用できる。
【0032】
センサデータ記憶部12は、モーションセンサ33によって測定されたデータを記憶する記憶部である。一例としては、センサデータ記憶部12は、端末装置30の加速度センサ33A及び角速度センサ33Bから受信した加速度及び角速度、さらには、角速度を時間積分することにより得られた相対方位角が後述の記録部16によって登録される。他の一例としては、センサデータ記憶部12は、利用者3が利用者の向きを特定可能な第1の地点を通過した時刻を特定するために、後述の特定部17によって参照される。更なる一例としては、センサデータ記憶部12は、R/W20によって端末IDが読み取られた地点における利用者3の向きを推定するために、後述の推定部18によって参照される。
【0033】
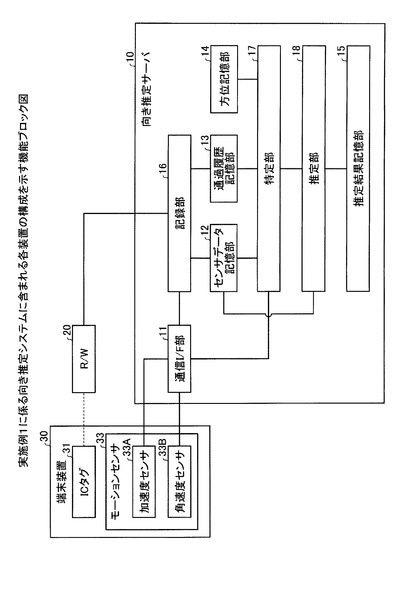
かかるセンサデータ記憶部12の一態様としては、端末ID、検出時刻および加速度が対応付けられた加速度データが時系列に蓄積される。ここで言う「検出時刻」とは、加速度センサ33Aによって加速度が検出された時刻を指す。図3は、加速度データの構成例を示す図である。図3の例では、いずれのレコードも端末ID「0001」を持つ端末装置30の加速度データを示している。図3に示すように、2010年12月1日の11時59分55秒には加速度(ax1,ay1,az1)が計測され、同日の12時00分00秒には加速度(ax2,ay2,az2)が計測され、また、同日の12時00分05秒には加速度(ax3,ay3,az3)が計測されている。なお、図3の例では、端末ID「0001」を持つ端末装置30の加速度データを例示したが、実際には他の端末IDを持つ端末装置30の加速度データも併せて記憶される。
【0034】
センサデータ記憶部12の他の一態様としては、端末ID、検出時刻、角速度および相対方位角が対応付けられた相対方位角データが時系列に蓄積される。ここで言う「検出時刻」とは、角速度センサ33Bによって角速度が採取された日時を指す。また、「相対方位角」とは、端末装置30の向きが初期状態の方位、例えば端末装置30がセンサ値の採取を開始する方位から相対的に移動した角度を指し、後述の記録部16によってZ軸周りの角速度が時間積分されることにより導出される。
【0035】
図4は、相対方位角データの構成例を示す図である。図4の例では、いずれのレコードも端末ID「0001」を持つ端末装置30の相対方位角データを示している。図4に示すように、2010年12月1日の11時59分55秒には角速度(ωx1,ωy1,ωz1)が計測され、同日の12時00分00秒には角速度(ωx2,ωy2,ωz2)が計測され、また、同日の12時00分05秒には角速度(ωx3,ωy3,ωz3)が計測されている。さらに、2010年12月1日の11時59分55秒には相対方位角d1が計測され、同日の12時00分00秒には相対方位角d2が計測され、また、同日の12時00分05秒には相対方位角d3が計測されている。なお、図4の例では、端末ID「0001」を持つ端末装置30の相対方位角データを例示したが、実際には他の端末IDを持つ端末装置30の加速度データも併せて記憶される。
【0036】
通過履歴記憶部13は、利用者3が広告5の近辺を通過した履歴を記憶する記憶部である。一例として、通過履歴記憶部13は、利用者3が携帯する端末装置30の端末IDが広告5に設置されたR/W20により読み取られた場合に、後述の記録部16によって登録される。
【0037】
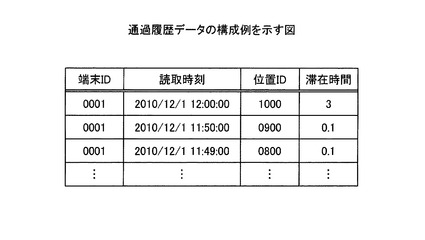
かかる通過履歴記憶部13の一態様としては、端末ID、読取時刻、位置ID及び滞在時間が対応付けられた通過履歴データを採用できる。ここで言う「読取時刻」とは、R/W20によって端末装置30の端末IDが読み取られた時刻を指す。また、「滞在時間」とは、利用者3が広告5の近辺に滞在していた期間を指し、R/W20によって端末装置30の端末IDが読み取られてから端末IDの読取が不可能になるまでの期間が後述の記録部16によって滞在時間として登録される。
【0038】
図5は、通過履歴データの構成例を示す図である。図5の例では、いずれのレコードも端末ID「0001」の端末装置30を携帯する利用者3の通過履歴データを示している。図5の例では、利用者3が2010年12月1日の11時49分00秒に位置ID「0800」の地点を通過したことを示す。このとき、利用者3は、位置ID「0800」の地点に0.1分の間、滞在していたことを示す。さらに、図5の例では、利用者3が同日の11時50分00秒に位置ID「0900」の地点を通過したことを示す。このとき、利用者3は、位置ID「0900」の地点に0.1分の間、滞在していたことを示す。さらに、図5の例では、利用者3が同日の12時00分00秒に位置ID「1000」の地点を通過したことを示す。このとき、利用者3は、位置ID「1000」の地点に3分の間、滞在していたことを示す。なお、図5の例では、端末ID「0001」を持つ端末装置30の通過履歴データを例示したが、実際には他の端末IDを持つ端末装置30の通過履歴データも併せて記憶される。
【0039】
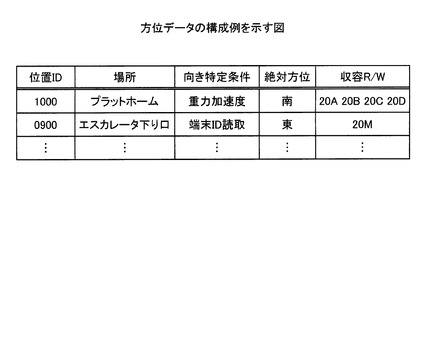
方位記憶部14は、向き特定条件ごとに当該向き特定条件を満たした場合に利用者3が向くと特定できる絶対方位を対応付けて記憶する記憶部である。かかる方位記憶部14の一態様としては、位置ID、場所、向き特定条件、絶対方位および収容R/Wが対応付けられた方位データを採用できる。ここで言う「向き特定条件」とは、利用者3の向きを特定するために満たすべき条件を指し、例えば、ヒューリステックにより利用者3の向きが一方向に絞り込める条件が定義される。また、「収容R/W」とは、向き特定条件が適用される場所に収容されるR/W20のIDもしくはID群を指す。
【0040】
図6は、方位データの構成例を示す図である。図6の例では、位置ID「1000」のプラットホームには、R/W20A、R/W20B、R/W20CまたはR/W20DのいずれかのR/W20によって端末IDが検知されてから所定の閾値以上の重力加速度を検出するという向き特定条件が設定されている。これは、人が電車に乗り込む際には電車の出入り口とホームの段差をまたぐ時の重力加速度が歩行時よりも大きくなるというヒューリステックに基づいて設定される。この場合に特定される絶対方位は、ホームから電車の出入り口の正面に向かう方向、すなわち図6に示す例では「南」が設定される。かかる向き特定条件を満たした場合には、重力加速度が閾値以上となった地点が第1の地点と見做され、当該第1の地点で利用者3が向いている絶対方位が「南」であると後述の特定部17によって特定される。
【0041】
また、図6の例では、位置ID「0900」のエスカレータ下り口には、R/W20Mによって端末IDが読み取られるという向き特定条件が設定されている。これは、人がエスカレータから降りる際には正面を向いて降りるというヒューリステックに基づいて設定される。この場合に特定される絶対方位は、エスカレータの下り口の正面方向、すなわち図6に示す例では「東」が設定される。かかる向き特定条件を満たした場合には、R/W20Mによって読み取られた地点が第1の地点と見做され、当該第1の地点で利用者3が向いている絶対方位が「東」であると後述の特定部17によって特定される。
【0042】
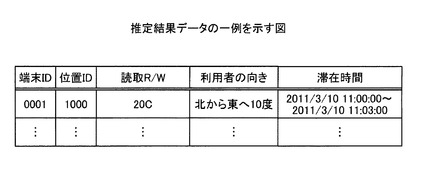
推定結果記憶部15は、後述の推定部18による利用者3の向きの推定結果を記憶する記憶部である。かかる推定結果記憶部15の一態様としては、端末ID、位置ID、読取R/W、利用者の向きおよび滞在時間が対応付けられた推定結果データを採用できる。ここで言う「読取R/W」は、広告5に設置されたR/W20のうち端末IDを読み取ったR/W20を指す。なお、上記の推定結果データは、後述の推定部18によってサービス事業者サーバ70へ送信される。
【0043】
図7は、推定結果データの一例を示す図である。図7の例では、位置ID「1000」のプラットホーム5に設けられた広告5のうち広告5Cに設置されたR/W20Cによって端末装置30の端末ID「0001」が読み取られたことを示す。すなわち、端末ID「0001」の端末装置30を携帯する利用者3が2011年3月10日の11時00分00秒から11時03分00秒まで広告5Cの近辺に滞在することを示す。このとき、端末ID「0001」の端末装置30を携帯する利用者3は、北から見て東へ10度の方向に向いていることを示す。なお、図7の例では、北を基準とした相対角度で利用者3の向きを表現する場合を例示したが、利用者3の向きの表現方法はこれに限定されず、任意の方位を基準とした相対角度で利用者3の向きを表現することができる。また、開示の向き推定サーバ10は、利用者3の方向を推定した場所にある目印を基準に利用者3の向きを表現することもできる。
【0044】
これらセンサデータ記憶部12、通過履歴記憶部13、方位記憶部14及び推定結果記憶部15などの記憶部には、半導体メモリ素子や記憶装置を採用できる。例えば、半導体メモリ素子としては、VRAM(Video Random Access Memory)、RAM(Random Access Memory)、ROM(Read Only Memory)やフラッシュメモリ(flash memory)などが挙げられる。また、記憶装置としては、ハードディスク、光ディスクなどの記憶装置が挙げられる。
【0045】
記録部16は、データの記録を制御する処理部である。一態様としては、記録部16は、端末装置30の加速度センサ33Aから検出時刻及び加速度を受信した場合に、送信元の端末装置30の端末IDに検出時刻及び加速度を対応付けた加速度データをセンサデータ記憶部12へ記録する。また、記録部16は、端末装置30の角速度センサ33Bから検出時刻及び角速度を受信した場合に、それまでに受信していた角速度との間で時間積分することにより、初期状態の方位から相対的に移動した角度、すなわち相対方位角を算出する。その上で、記録部16は、送信元の端末装置30の端末IDに検出時刻、角速度及び相対方位角を対応付けた相対方位角データをセンサデータ記憶部12へ記録する。なお、記録部16は、加速度センサ33A及び角速度センサ33Bに加速度または角速度を通知させる頻度を任意の頻度に設定できるものとする。
【0046】
他の一態様としては、記録部16は、R/W20から位置ID、端末ID及び読取時刻を受信した場合に、位置ID、端末ID及び読取時刻を対応付けた通過履歴データを通過履歴記憶部13へ記録する。このとき、記録部16は、R/W20からの位置ID、端末ID及び読取時刻の通知が始まってから通知が終了するまでの期間を計測し、計測した期間を通過履歴データに追加して登録する。
【0047】
特定部17は、利用者3の向きを特定可能な第1の地点における利用者の向きを特定する処理部である。一態様としては、特定部17は、R/W20から位置ID、端末ID及び読取時刻が通知された場合に処理を起動し、方位記憶部14に記憶された向き特定条件のうち送信元のR/W20に対応する向き特定条件を読み出す。このとき、特定部17は、向き特定条件が「端末ID読取」である場合に、端末IDの読取時刻T0を向き特定時刻T1に設定する。このように端末IDの読取時刻T0を向き特定時刻T1とするのは、R/W20によって読み取られた地点を第1の地点と見做す向き特定条件が設定されているからである。一方、特定部17は、向き特定条件が「重力加速度」である場合に、センサデータ記憶部12に記憶された加速度データを参照して、R/W20によって端末IDが検知されてから所定の閾値以上の重力加速度が検出された時刻を向き特定時刻T1に設定する。その後、特定部17は、方位記憶部14を参照して、今回適用した向き特定条件を満たす地点の絶対方位を第1の地点における利用者3の向きとして特定する。
【0048】
このように向き特定時刻T1を設定しておくことによって、以降の処理で相対方位角データのうち第1の地点における相対方位角θ1を呼び出すことが可能になる。なお、ここでは、時刻をインデックスとして第1の地点における相対方位角θ1を呼び出す場合を例示したが、相対方位角と紐付けられた任意のデータ、例えば所定の位置を原点とした歩数をインデックスとして採用できる。
【0049】
推定部18は、第1の地点に対応する相対方位角および端末IDが読み取られた第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する処理部である。
【0050】
ここで、推定部18は、一態様として、利用者3によって携帯された端末装置30が鞄や着衣のポケットに収納された状態で利用者3の向きと端末装置30の向きとの相対関係が変化しないものと見做して第2の地点における利用者3の向きを推定する。
【0051】
これを説明すると、まず、推定部18は、特定部17によって特定された向き特定時刻T1を取得する。続いて、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角を読み出す。これによって、第1の地点における相対方位角θ1が取得されることになる。そして、推定部18は、第1の地点における利用者3の向きから第1の地点における相対方位角θ1を減算することにより、端末装置30がセンサ値の採取を開始する初期状態に利用者3が向いていると推定可能な方位を示す基軸を特定する。その後、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2を読み出す。これによって、第2の地点における相対方位角θ2が取得されることになる。その上で、推定部18は、先に算出した利用者3の基軸を形成する方位に第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きを推定する。その後、推定部18は、推定した推定結果、例えば利用者3の向きを始め、利用者3の端末ID、広告5が所在する位置IDと収容R/W、利用者3の滞在時間などを対応付けた推定結果データを推定結果記憶部15へ登録する。
【0052】
なお、ここでは、端末装置30の基軸を求めてから第2の地点における利用者3の向きを推定する場合を例示したが、利用者の向きの推定方法はこれに限定されない。例えば、推定部18は、第1の地点における利用者3の向きに第1の地点における相対方位角θ1と第2の地点における相対方位角θ2との差分を足し合わせることにより、第2の地点における利用者3の向きを推定することもできる。
【0053】
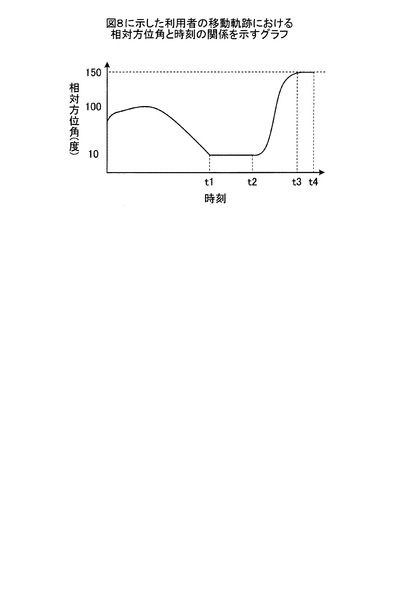
ここで、図8及び図9を用いて、利用者の向きを推定する具体例を説明する。図8は、プラットホーム5における利用者3の移動軌跡を模式化した図であり、図9は、図8に示した利用者3の移動軌跡における相対方位角と時刻の関係を示すグラフである。図8の例では、上方向が北、下方向が南、左方向が西、右方向が東である場合をあるものとして以下の説明を行う。なお、図9のグラフでは、縦軸が相対方位角(度)を表し、横軸が時刻(sec)を表すものとする。
【0054】
図8に示すように、利用者3は、広告5Aに設置されたR/W20A及び広告5Bに設置されたR/W20Bの読取範囲外を通過した後に、広告5Cに設置されたR/W20Cの読取範囲内に到達する。このR/W20Cの読取範囲への到達により、R/W20Cによって利用者3が携帯する端末装置30の端末IDの読取が開始された時刻がT0であるとする。この場合、図9に示すように、時刻t1(=T0)から時刻t2までの期間は相対方位角に変化がない。これは利用者3が広告5Cの前で立ち止まっていることを表す。その後、時刻t2を経過すると、利用者3の移動に伴って相対方位角が再び変化を始める。そして、時刻t3で再び相対方位角の変化がなくなり、時刻t4(=T1)で閾値以上の重力加速度が検出されたとする。
【0055】
この場合には、閾値以上の重力加速度が検出された時刻T1に対応する相対方位角が特定部17によって第1の地点における相対方位角θ1として設定される。さらに、図6に示した方位データによって定義されたように、重力加速度が閾値以上となった地点を第1の地点とし、当該第1の地点で利用者3が向いている絶対方位が「南」であると特定部17によって特定される。その後、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角θ1が推定部18によって読み出される。このとき、相対方位角θ1が150度であるとする。さらに、第1の地点における利用者3の向きDから第1の地点における相対方位角θ1を減算することにより、利用者3の基軸U(30度=D−θ1)が推定部18によって特定される。その後、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2が推定部18によって読み出される。このとき、相対方位角θ2が10度であるとする。その上で、先に算出した端末装置30の基軸Uに第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きAn(40度=U+θ2)が推定部18によって推定される。
【0056】
また、推定部18は、推定結果記憶部15に記憶された推定結果データをサービス事業者サーバ70へ送信する。このとき、推定部18は、滞在時間が所定の期間以上である推定結果データだけを絞り込んでサービス事業者サーバ70へ送信することもできる。
【0057】
なお、記録部16、特定部17及び推定部18には、各種の集積回路や電子回路を採用できる。例えば、集積回路としては、ASIC(Application Specific Integrated Circuit)が挙げられる。また、電子回路としては、CPU(Central Processing Unit)やMPU(Micro Processing Unit)などが挙げられる。
【0058】
[処理の流れ]
次に、本実施例に係る向き推定サーバの処理の流れについて説明する。なお、ここでは、特定部17によって実行される(1)特定処理を説明した後に、推定部18によって実行される(2)推定処理を説明することとする。
【0059】
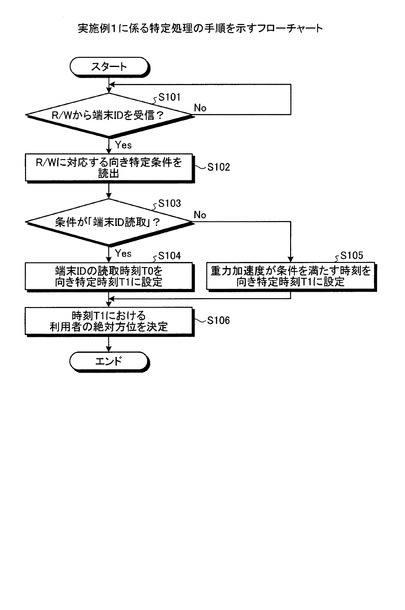
(1)特定処理
図10は、実施例1に係る特定処理の手順を示すフローチャートである。図10に示す特定処理は、R/W20から位置ID、端末ID及び読取時刻を受信した場合に処理を起動する。
【0060】
図10に示すように、特定部17は、R/W20から位置ID、端末ID及び読取時刻を受信した場合(ステップS101肯定)に、方位記憶部14に記憶された向き特定条件のうち送信元のR/W20に対応する向き特定条件を読み出す(ステップS102)。
【0061】
このとき、向き特定条件が「端末ID読取」である場合(ステップS103肯定)には、特定部17は、端末IDの読取時刻T0を向き特定時刻T1に設定する(ステップS104)。
【0062】
一方、向き特定条件が「重力加速度」である場合(ステップS103否定)には、特定部17は、次のような処理を実行する。すなわち、特定部17は、センサデータ記憶部12に記憶された加速度データを参照して、R/W20によって端末IDが検知されてから所定の閾値以上の重力加速度が検出された時刻を向き特定時刻T1に設定する(ステップS105)。
【0063】
その後、特定部17は、方位記憶部14を参照して、向き特定時刻T1における利用者3の絶対方位を決定し(ステップS106)、処理を終了する。
【0064】
(2)推定処理
図11は、実施例1に係る推定処理の手順を示すフローチャートである。図11に示す推定処理は、図10に示すステップS106の処理が終了した場合に起動する。
【0065】
図11に示すように、推定部18は、特定部17によって特定された向き特定時刻T1を取得する(ステップS301)。続いて、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角を読み出す(ステップS302)。
【0066】
そして、推定部18は、第1の地点における利用者3の向きから第1の地点における相対方位角θ1を減算することにより、端末装置30がセンサ値の採取を開始する初期状態に利用者3が向いていると推定可能な方位を示す基軸を特定する(ステップS303)。
【0067】
その後、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2を読み出す(ステップS304)。
【0068】
その上で、推定部18は、先に算出した利用者3の基軸を形成する方位に第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きを推定し(ステップS305)、処理を終了する。
【0069】
[実施例1の効果]
上述してきたように、本実施例に係る向き推定サーバ10は、利用者3が接近した広告5の所在位置である第2の地点における利用者3の向きを特定するのに、ヒューリステックにより利用者3の向きを既知とできる第1の地点における利用者の向きを使用する。それゆえ、本実施例に係る向き推定サーバ10では、利用者3と端末装置30の関係を特定の位置関係に限定せずとも、第1の地点に対応する相対方位角および第2の地点の相対方位角との演算により第2の地点における利用者の向きを推定できる。
【0070】
よって、本実施例に係る向き推定サーバ10によれば、利用者3と端末装置30の関係が既知でなくとも、第2の地点における利用者の向きを推定できる。さらに、本実施例に係る向き推定サーバ10では、広告に設置されたカメラを用いて利用者3の向きを推定する場合よりも費用を抑えて利用者3の向きを推定できる。
【0071】
さらに、本実施例に係る向き推定サーバ10は、方位記憶部14を参照して、端末装置30を携帯する利用者3が移動により条件を満たした地点を第1の地点とし、該条件に対応付けられた絶対方位を第1の地点における利用者3の向きと特定する。このため、本実施例に係る向き推定サーバ10では、例えば、ヒューリステックを適用した条件を用いて第1の地点における利用者3の向きと特定できる。よって、本実施例に係る向き推定サーバ10は、利用者3の向きの推定精度を向上させることができる。
【実施例2】
【0072】
さて、これまで開示の装置に関する実施例について説明したが、本発明は上述した実施例以外にも、種々の異なる形態にて実施されてよいものである。そこで、以下では、本発明に含まれる他の実施例を説明する。
【0073】
[向きの推定ポイント]
また、上記の実施例1では、R/W20Cによって端末IDが読み取られた第2の地点における利用者3の向きを推定する場合を例示したが、他の地点における利用者3の向きを推定することもできる。一例としては、図8及び図9の例では、R/W20のうちR/W20Cだけに端末IDが読み取られた場合を説明したが、R/W20AやR/W20Bでも端末IDが読み取られた場合には、広告5A及び5Bにおける利用者3の向きを推定してもかまわない。他の一例としては、向き推定サーバ10は、センサデータ記憶部12に相対方位角が記憶された全ての地点を対象に利用者3の向きを推定することもできる。
【0074】
[位置検出センサ]
上記の実施例1では、端末装置30のICタグ31及びR/W20を用いて端末装置30の位置検出を行う場合を説明したが、開示のシステムはこれに限定されない。例えば、端末装置30は、GPS、デッドレコニングやRSSI(Received Signal Strength Indication)などの公知の位置検出センサを用いて端末装置30の位置を検出することができる。
【0075】
[方位検出センサ]
また、上記の実施例1では、角速度センサ33Bを用いて端末装置30の向きを検出する場合を例示したが、開示の装置はこれに限定されない。例えば、端末装置30は、角速度センサ及び地磁気センサの両方を搭載しておき、屋内では上記の実施例1と同様に角速度センサを用いるとともに、屋外では地磁気センサを用いて端末装置30の絶対方位を検出することとしてもよい。これによって、屋内で検出精度に不安がある地磁気センサの弱点を補いながら利用者の向きを検出することが可能になる。
【0076】
[端末装置のスタンドアローン]
また、上記の実施例1では、向き推定サーバ10が利用者3の向きを推定する場合を例示したが、開示の装置はこれに限定されない。例えば、端末装置30が利用者3の向きを単独で推定することもできる。この場合には、図2に示したセンサデータ記憶部12、通過履歴記憶部13、方位記憶部14、推定結果記憶部15、記録部16、特定部17及び推定部18と同様の機能を発揮する機能部を端末装置30に移植すればよい。
【0077】
[歩行検知]
また、端末装置30の向き又は利用者3の人の向きの相対関係を確定させる方法として、加速度センサのセンサ値によって利用者の歩行検知と進行方向を認識し、その時に端末装置30の地磁気センサにより検出された向きで相対関係を保存する方法を採用できる。なお、加速度センサの代わりにGPSを用いることもできる。
【0078】
ただし、電車などの乗り物に乗っている場合には、上下の加速度動作が少なく、一定の方向に進むなどが想定されるので、このような場合は、端末装置30の向き、利用者3の向きの相対関係を確定しないようにする。これによって、利用者3の向きと端末装置30の向きの相対関係を確定の精度を向上する。つまり、利用者にとって左右方向に進んでいるにもかかわらず、歩行状態と検知して、進行方向が利用者3の向きであると、誤った利用者3の向きを採用しないようにすることもできる。また、利用者の向きと端末の向きの相対関係は、一度確定しても利用者3が鞄を持ち替えるなどの動作を行うと相対関係がズレるので、利用者3の向きと端末装置30の向きの相対関係が確定した最新の相対関係を用いて、利用者の向きを推定するのが好ましい。
【0079】
このように、GPSや加速度センサなどの位置検出センサから得られる位置を用いて、複数の位置の軌跡から利用者の進行方向を特定可能な地点を第1の地点とし、該第1の地点における利用者の進行方向を利用者の向きと同定する。これによって、端末装置30がスタンドアローンで利用者3の向きを推定できる。
【0080】
[基軸の特定順序]
なお、上記の実施例1では、R/W20によって端末IDが読み取られてから、すなわち端末装置30が第2の地点に到達してから利用者3の基軸を特定する場合を説明したが、利用者3の基軸を先に特定することとしてもかまわない。
【0081】
[相対関係の保持]
また、開示の向き推定サーバ10では、利用者3の向きと端末装置30の向きとの相対関係、すなわち利用者3の基軸を保持しておくことにより、それ以降にR/W20によって端末IDが読み取られた地点における利用者3の向きを継続して推定することもできる。このとき、向き推定サーバ10は、利用者3が通過した第1の地点の中でも最新の第1の地点で特定された利用者3の基軸を保持するのが好ましい。
【0082】
[分散および統合]
また、図示した各装置の各構成要素は、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各装置の分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、記録部16、特定部17または推定部18を向き推定装置の外部装置としてネットワーク経由で接続するようにしてもよい。また、記録部16、特定部17または推定部18を別の装置がそれぞれ有し、ネットワーク接続されて協働することで、上記の向き推定サーバ10の機能を実現するようにしてもよい。
【0083】
[向き推定プログラム]
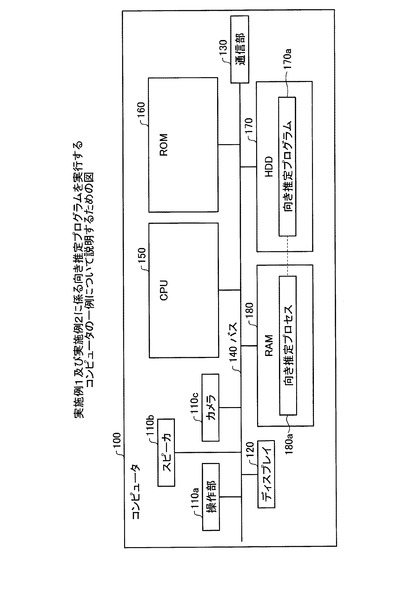
また、上記の実施例で説明した各種の処理は、予め用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータで実行することによって実現することができる。そこで、以下では、図12を用いて、上記の実施例と同様の機能を有する向き推定プログラムを実行するコンピュータの一例について説明する。
【0084】
図12は、実施例1及び実施例2に係る向き推定プログラムを実行するコンピュータの一例について説明するための図である。図12に示すように、コンピュータ100は、操作部110aと、スピーカ110bと、カメラ110cと、ディスプレイ120と、通信部130とを有する。さらに、このコンピュータ100は、CPU150と、ROM160と、HDD170と、RAM180と有する。これら110〜180の各部はバス140を介して接続される。
【0085】
HDD170には、図12に示すように、上記の実施例1で示した記録部16と、特定部17と、推定部18と同様の機能を発揮する向き推定プログラム170aが予め記憶される。この向き推定プログラム170aについては、図2に示した各々の記録部16、特定部17及び推定部18の各構成要素と同様、適宜統合又は分離しても良い。すなわち、HDD170に格納される各データは、常に全てのデータがHDD170に格納される必要はなく、処理に必要なデータのみがHDD170に格納されれば良い。
【0086】
そして、CPU150が、向き推定プログラム170aをHDD170から読み出してRAM180に展開する。これによって、図12に示すように、向き推定プログラム170aは、向き推定プロセス180aとして機能する。この向き推定プロセス180aは、HDD170から読み出した各種データを適宜RAM180上の自身に割り当てられた領域に展開し、この展開した各種データに基づいて各種処理を実行する。なお、向き推定プロセス180aは、図2に示した記録部16、特定部17及び推定部18にて実行される処理、例えば図10や図11に示す処理を含む。また、CPU150上で仮想的に実現される各処理部は、常に全ての処理部がCPU150上で動作する必要はなく、処理に必要な処理部のみが仮想的に実現されれば良い。
【0087】
なお、上記の向き推定プログラム170aについては、必ずしも最初からHDD170やROM160に記憶させておく必要はない。例えば、コンピュータ100に挿入されるフレキシブルディスク、いわゆるFD、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に各プログラムを記憶させる。そして、コンピュータ100がこれらの可搬用の物理媒体から各プログラムを取得して実行するようにしてもよい。また、公衆回線、インターネット、LAN、WANなどを介してコンピュータ100に接続される他のコンピュータまたはサーバ装置などに各プログラムを記憶させておき、コンピュータ100がこれらから各プログラムを取得して実行するようにしてもよい。
【符号の説明】
【0088】
1 向き推定システム
3 利用者
5 プラットホーム
5A,5B,5C,5D 広告
10 向き推定サーバ
11 通信I/F部
12 センサデータ記憶部
13 通過履歴記憶部
14 方位記憶部
15 推定結果記憶部
16 記録部
17 特定部
18 推定部
20A,20B,20C,20D R/W
30 端末装置
70 サービス事業者サーバ
【技術分野】
【0001】
本発明は、向き推定方法、向き推定装置及び端末装置に関する。
【背景技術】
【0002】
利用者によって携帯される端末装置に搭載された各種のセンサの出力を用いて利用者の行動を推定する技術が知られている。例えば、GPS受信機、モーションセンサやRFIDタグから採取される位置情報から利用者の現在位置を特定したり、位置情報を時系列に蓄積することにより利用者の移動軌跡を特定したりすることができる。なお、上記の「GPS」は、「Global Positioning System」の略称であり、また、「RFID」は、「Radio Frequency Identification」の略称である。
【0003】
これら利用者の現在位置や移動軌跡を推定する技術の他にも、利用者が向いている方向を推定する技術がある。かかる利用者の向きを推定する技術の一例としては、歩行者の現在位置と向きを基準に目的地までの経路案内または経路誘導を行う歩行者ナビゲーション方法が挙げられる。この歩行者ナビゲーション方法では、歩行者が携帯電話を手に持って操作したり表示を見る状態を想定し、携帯電話の背面方向または上部方向を歩行者の向きと仮定する。このような仮定の下、歩行者ナビゲーションサーバは、磁気方位センサによって測定された携帯電話が向いている方向を上とし、現在位置を基準とした目的地の方向と目的地までの距離を携帯電話に表示させる。
【0004】
このようにして推定された利用者の行動は、利用者へのナビゲーションに利用される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−58057号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記の従来技術は、歩行者を経路案内または経路誘導するという限定的な場面で歩行者の向きを推定しようとするものに過ぎず、利用者と端末装置の関係が既知でなければ利用者の向きを推定することはできない。
【0007】
すなわち、携帯電話は、歩行者によって常時使用される訳ではなく、むしろ鞄や着衣のポケットなどに収納された状態で携帯されるのが一般的である。ところが、鞄や着衣のポケットなどに収納された状態で携帯された場合には、そもそも歩行者が携帯電話を手に持って操作したり表示を見るという上記の歩行者ナビゲーション方法の仮定が成立しない。このように、上記の歩行者ナビゲーション方法では、利用者と端末装置の関係が既知でなければ利用者の向きを推定することはできない。例えば、利用者が移動する過程でどのような広告に興味を持ったかを収集するといったモニタリングにも利用される場合に、利用者と端末装置の関係が既知でなければ広告に対する利用者の興味を収集するのに適用することはできない。
【0008】
開示の技術は、上記に鑑みてなされたものであって、利用者の向きを推定できる向き推定方法、向き推定装置及び端末装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本願の開示する向き推定方法は、コンピュータが、利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録する処理を実行する。さらに、前記コンピュータが、前記利用者の向きを特定可能な第1の地点における利用者の向きを特定する処理を実行する。さらに、前記コンピュータが、前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する処理を実行する。
【発明の効果】
【0010】
本願の開示する向き推定方法の一つの態様によれば、利用者の向きを推定できるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る向き推定システムの構成を示す図である。
【図2】図2は、実施例1に係る向き推定システムに含まれる各装置の構成を示す機能ブロック図である。
【図3】図3は、加速度データの構成例を示す図である。
【図4】図4は、相対方位角データの構成例を示す図である。
【図5】図5は、通過履歴データの構成例を示す図である。
【図6】図6は、方位データの構成例を示す図である。
【図7】図7は、推定結果データの一例を示す図である。
【図8】図8は、プラットホームにおける利用者の移動軌跡を模式化した図である。
【図9】図9は、図8に示した利用者の移動軌跡における相対方位角と時刻の関係を示すグラフである。
【図10】図10は、実施例1に係る特定処理の手順を示すフローチャートである。
【図11】図11は、実施例1に係る推定処理の手順を示すフローチャートである。
【図12】図12は、実施例1及び実施例2に係る向き推定プログラムを実行するコンピュータの一例について説明するための図である。
【発明を実施するための形態】
【0012】
以下に、本願の開示する向き推定方法、向き推定装置及び端末装置の実施例を図面に基づいて詳細に説明する。なお、この実施例は開示の技術を限定するものではない。そして、各実施例は、処理内容を矛盾させない範囲で適宜組み合わせることが可能である。
【実施例1】
【0013】
[システム構成]
まず、本実施例に係る向き推定システムの構成について説明する。図1は、実施例1に係る向き推定システムの構成を示す図である。図1に示す向き推定システム1には、向き推定サーバ10と、R/W20A〜20Dと、端末装置30と、サービス事業者サーバ70とが収容される。なお、図1の例では、プラットホーム5に設置された広告5A〜5Dへの接近がR/W20A〜20Dにより検知された端末装置30を携帯する利用者3がいずれの方向を向いているのかを推定する場合を想定する。
【0014】
これらR/W20A〜20Dまたはサービス事業者サーバ70と向き推定サーバ10との間は、任意のネットワークを介して通信可能に接続される。かかるネットワークの一例としては、有線または無線を問わず、インターネット(Internet)、LAN(Local Area Network)やVPN(Virtual Private Network)などの通信網が挙げられる。一方、端末装置30と向き推定サーバ10との間は、一例として、携帯電話網等を介して通信可能に接続される。なお、以下では、R/W20A〜R/W20Dの各装置を区別なく説明する場合には「R/W20」と総称し、広告5A〜広告5Dの各広告を区別なく説明する場合には「広告5」と総称する場合がある。
【0015】
R/W20は、後述する端末装置30に内蔵されたICタグ(Integrated Circuit)31との間で通信を行ってICタグ31内の記録情報の読取または書込を行う装置である。このR/W20は、密接型、近接型または近傍型の仕様で定められた通信の有効距離とした電磁波を発射する。この電磁波を用いて、端末装置30のICタグ31に組み込まれたコイル式のアンテナにより発電が行われてデータ通信が可能となる。その上で、R/W20は、端末装置30のICタグ31に記録された情報、例えば端末装置30を識別する端末ID(Identification)を読み取り、読み取った端末IDを自装置が設置された位置を識別する位置IDとともに向き推定サーバ10へ送信する。
【0016】
一例として、R/W20は、図1に示すように、プラットホーム5の広告5A〜5Dと一対一に対応付けて設けられる。このため、R/W20A〜R/W20Dのいずれかによって端末IDが読み取られた場合には、端末IDを読み取ったR/W20が取り付けられている広告5に端末装置30を携帯する利用者3が接近したことを検知できる。なお、図1の例では、4つの広告5A〜5Dが設置されている場合を例示したが、開示のシステムは、単数を含む任意の広告が設置される場合に適用できる。また、図1の例では、広告とR/Wを一対一に対応付けて設ける場合を例示したが、複数の広告につき1つのR/Wを設けることとしてもかまわない。
【0017】
端末装置30は、利用者3によって携帯される情報処理装置である。かかる端末装置30の一態様としては、スマートフォンを始め、携帯電話、PHS(Personal Handyphone System)やPDA(Personal Digital Assistant)などを採用できる。なお、図1の例では、端末装置30が利用者3の鞄の中に収納された状態で携帯される場合を想定するが、端末装置30の携帯方法はこれに限定されない。すなわち、開示のシステムは、端末装置30の携帯方法は1つの仮定に限定されず、ポケットの中に収納されるなどのように他の状態で携帯される場合にも、後述の利用者の向き推定方法を同様に適用される。また、図1の例では、端末装置30を1つだけ例示したが、端末装置30は1つである必要はなく、開示のシステムには、複数の端末装置30を収容することができる。
【0018】
また、端末装置30は、後述するICタグ31を搭載し、R/W20との間で端末装置30の端末IDなどのデータ通信を実行する。さらに、端末装置30は、後述するモーションセンサ33を搭載し、モーションセンサ33によって出力されたセンサ値を向き推定サーバ10へアップロードする。かかるモーションセンサ33の一態様としては、後述する加速度センサ33Aや角速度センサ33Bなどを採用できる。このとき、端末装置30は、モーションセンサ33の出力を逐次送信することもできるし、通信トラヒックを抑制するために、一定期間にわたって蓄積したセンサ値をまとめて送信することもできる。
【0019】
なお、ここでは、端末装置30がICタグ31やモーションセンサ33を搭載する場合を例示したが、開示の端末装置30には、上記のセンサ以外にも各種のセンサを搭載することができる。例えば、開示の端末装置30は、相対方位角を測定する角速度センサ33Bに代えて絶対方位を測定する地磁気センサを採用することもできるし、これらの両方を搭載することもできる。また、開示の端末装置30は、端末装置30の位置を検出するセンサとしてICタグ31に代えてGPS(Global Positioning System)センサを採用することもできるし、これらの両方を搭載することもできる。なお、本実施例では、3軸モーションセンサや3軸地磁気センサにより、または、これらのセンサの履歴により、地面に対する垂直方向または水平面を特定することができる。これにより、本実施例では、端末装置の姿勢を推定することが可能となり、本実施例で用いる相対方位角とは、この推定された水平面における相対方位角を表す。
【0020】
向き推定サーバ10は、プラットホーム5に設置された広告5A〜5Dに接近した利用者3がいずれの方向を向いているのかを推定するサービスを提供するコンピュータである。一例としては、向き推定サーバ10は、広告5A〜5Dに設置されたR/W20A〜20DのいずれかのR/W20から位置ID及び端末IDを受信した場合に、広告5の近辺で端末装置30を携帯する利用者3が向いている方向を推定する。その上で、向き推定サーバ10は、広告5の位置ID、日時や利用者の向きなどの推定結果をサービス事業者サーバ70へ送信する。
【0021】
ここで、本実施例に係る向き推定サーバ10は、利用者3によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、本実施例に係る向き推定サーバ10は、利用者3の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、本実施例に係る向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者3の向きとを用いて、第2の地点における利用者3の向きを推定する。
【0022】
このように、本実施例に係る向き推定サーバ10では、利用者3が接近した広告5の所在位置である第2の地点における利用者3の向きを特定するのに、ヒューリステックにより利用者3の向きを既知とできる第1の地点における利用者の向きを使用する。それゆえ、本実施例に係る向き推定サーバ10では、利用者3と端末装置30の関係を特定の位置関係に限定せずとも、第1の地点に対応する相対方位角および第2の地点の相対方位角との演算により第2の地点における利用者の向きを推定できる。
【0023】
よって、本実施例に係る向き推定サーバ10によれば、利用者3と端末装置30の関係が既知でなくとも、第2の地点における利用者の向きを推定できる。さらに、本実施例に係る向き推定サーバ10では、広告5に設置されたカメラを用いて利用者3の向きを推定する場合よりも費用を抑えて利用者3の向きを推定できる。
【0024】
サービス事業者サーバ70は、広告5に関連する各種のサービスを提供する事業者によって運営されるコンピュータである。一例としては、サービス事業者サーバ70は、向き推定サーバ10から受信した推定結果をもとに、広告5の方向に向いていた利用者3、すなわち広告5に興味を持った利用者3を特定する。他の一例としては、サービス事業者サーバ70は、広告5を通過した各々の利用者3の向きを地図上にマッピングしたり、広告5に興味を持った利用者3を集計することにより広告5の効果を分析したりする。更なる一例としては、サービス事業者サーバ70は、広告5に興味を持った利用者3に広告に関連するサービスのメールを送信したりする。
【0025】
[端末装置30の構成]
続いて、本実施例に係る端末装置30の機能的構成について説明する。図2は、実施例1に係る向き推定システムに含まれる各装置の構成を示す機能ブロック図である。図2に示すように、端末装置30は、ICタグ31と、モーションセンサ33とを有する。なお、端末装置30は、図2に示した機能部以外にも既知の端末装置が有する各種の機能部、例えば各種の入力デバイスや音声出力デバイスなどを始め、キャリアによる通信を実行する機能部やアプリケーションプログラムを実行する機能部を有するものとする。
【0026】
ICタグ31は、ICチップとコイル式のアンテナとを内蔵するRFIDタグである。一例としては、ICタグ31は、R/W20から発射された電磁波が供給されると、コイル式のアンテナにより発電し、その電力を用いてICチップに記録された情報、例えば端末IDをR/W20へ送信する。なお、端末IDには、端末装置30の電話番号やSIMカード(Subscriber Identity Module)のID番号などの任意の識別子を採用できる。
【0027】
モーションセンサ33は、端末装置30の動きを計測するセンサである。このモーションセンサ33は、図2に示すように、加速度センサ33Aと、角速度センサ33Bとを有する。なお、図2の例では、加速度センサ33A及び角速度センサ33Bを有する場合を例示したが、必ずしも2つのセンサである必要はなく、さらに地磁気センサや速度センサを有することとしてもよい。
【0028】
このうち、加速度センサ33Aは、端末装置30の加速度を計測するセンサである。かかる加速度センサ33Aの一態様としては、X軸方向、Y軸方向、Z軸方向の加速度を計測する3軸加速度センサを採用できる。このように加速度センサ33Aによって計測される3軸方向のセンサ値は、図示しないA/D変換器によってデジタル値に変換された後に向き推定サーバ10へ送信される。なお、加速度の計測方式には、半導体式を始め、機械式や光学式などの任意の方式を採用できる。
【0029】
角速度センサ33Bは、端末装置30の角速度を計測するセンサである。かかる角速度センサ33Bの一態様としては、X軸周り、Y軸周り、Z軸周りの加速度を計測する3軸ジャイロスコープを採用できる。このように角速度センサ33Bによって計測される3軸周りのセンサ値は、図示しないA/D変換器によってデジタル値に変換された後に向き推定サーバ10へ送信される。なお、角速度の計測方式には、振動型を始め、回転型などの任意の方式を採用できる。
【0030】
[向き推定サーバ10の構成]
次に、本実施例に係る向き推定サーバ10の機能的構成について説明する。図2に示すように、向き推定サーバ10は、通信I/F(interface)部11と、センサデータ記憶部12と、通過履歴記憶部13と、方位記憶部14と、推定結果記憶部15とを有する。さらに、向き推定サーバ10は、記録部16と、特定部17と、推定部18とを有する。なお、向き推定サーバ10は、図2に示した機能部以外にも既知のコンピュータが有する各種の機能部、例えば各種の入力デバイスや音声出力デバイスなどの機能部を有するものとする。
【0031】
通信I/F部11は、他の装置、例えばR/W20やサービス事業者サーバ70との間で通信制御を行うインタフェースである。一例としては、通信I/F部11は、R/W20から位置ID及び端末IDを受信したり、端末装置30からモーションセンサ33のセンサ値を受信したりする。他の一例としては、通信I/F部11は、後述の推定部18によって利用者3の向きが推定された推定結果をサービス事業者サーバ70へ送信したりする。かかる通信I/F部11の一態様としては、LANカードなどのネットワークインタフェースカード(NIC:Network Interface Card)やモデムを採用できる。
【0032】
センサデータ記憶部12は、モーションセンサ33によって測定されたデータを記憶する記憶部である。一例としては、センサデータ記憶部12は、端末装置30の加速度センサ33A及び角速度センサ33Bから受信した加速度及び角速度、さらには、角速度を時間積分することにより得られた相対方位角が後述の記録部16によって登録される。他の一例としては、センサデータ記憶部12は、利用者3が利用者の向きを特定可能な第1の地点を通過した時刻を特定するために、後述の特定部17によって参照される。更なる一例としては、センサデータ記憶部12は、R/W20によって端末IDが読み取られた地点における利用者3の向きを推定するために、後述の推定部18によって参照される。
【0033】
かかるセンサデータ記憶部12の一態様としては、端末ID、検出時刻および加速度が対応付けられた加速度データが時系列に蓄積される。ここで言う「検出時刻」とは、加速度センサ33Aによって加速度が検出された時刻を指す。図3は、加速度データの構成例を示す図である。図3の例では、いずれのレコードも端末ID「0001」を持つ端末装置30の加速度データを示している。図3に示すように、2010年12月1日の11時59分55秒には加速度(ax1,ay1,az1)が計測され、同日の12時00分00秒には加速度(ax2,ay2,az2)が計測され、また、同日の12時00分05秒には加速度(ax3,ay3,az3)が計測されている。なお、図3の例では、端末ID「0001」を持つ端末装置30の加速度データを例示したが、実際には他の端末IDを持つ端末装置30の加速度データも併せて記憶される。
【0034】
センサデータ記憶部12の他の一態様としては、端末ID、検出時刻、角速度および相対方位角が対応付けられた相対方位角データが時系列に蓄積される。ここで言う「検出時刻」とは、角速度センサ33Bによって角速度が採取された日時を指す。また、「相対方位角」とは、端末装置30の向きが初期状態の方位、例えば端末装置30がセンサ値の採取を開始する方位から相対的に移動した角度を指し、後述の記録部16によってZ軸周りの角速度が時間積分されることにより導出される。
【0035】
図4は、相対方位角データの構成例を示す図である。図4の例では、いずれのレコードも端末ID「0001」を持つ端末装置30の相対方位角データを示している。図4に示すように、2010年12月1日の11時59分55秒には角速度(ωx1,ωy1,ωz1)が計測され、同日の12時00分00秒には角速度(ωx2,ωy2,ωz2)が計測され、また、同日の12時00分05秒には角速度(ωx3,ωy3,ωz3)が計測されている。さらに、2010年12月1日の11時59分55秒には相対方位角d1が計測され、同日の12時00分00秒には相対方位角d2が計測され、また、同日の12時00分05秒には相対方位角d3が計測されている。なお、図4の例では、端末ID「0001」を持つ端末装置30の相対方位角データを例示したが、実際には他の端末IDを持つ端末装置30の加速度データも併せて記憶される。
【0036】
通過履歴記憶部13は、利用者3が広告5の近辺を通過した履歴を記憶する記憶部である。一例として、通過履歴記憶部13は、利用者3が携帯する端末装置30の端末IDが広告5に設置されたR/W20により読み取られた場合に、後述の記録部16によって登録される。
【0037】
かかる通過履歴記憶部13の一態様としては、端末ID、読取時刻、位置ID及び滞在時間が対応付けられた通過履歴データを採用できる。ここで言う「読取時刻」とは、R/W20によって端末装置30の端末IDが読み取られた時刻を指す。また、「滞在時間」とは、利用者3が広告5の近辺に滞在していた期間を指し、R/W20によって端末装置30の端末IDが読み取られてから端末IDの読取が不可能になるまでの期間が後述の記録部16によって滞在時間として登録される。
【0038】
図5は、通過履歴データの構成例を示す図である。図5の例では、いずれのレコードも端末ID「0001」の端末装置30を携帯する利用者3の通過履歴データを示している。図5の例では、利用者3が2010年12月1日の11時49分00秒に位置ID「0800」の地点を通過したことを示す。このとき、利用者3は、位置ID「0800」の地点に0.1分の間、滞在していたことを示す。さらに、図5の例では、利用者3が同日の11時50分00秒に位置ID「0900」の地点を通過したことを示す。このとき、利用者3は、位置ID「0900」の地点に0.1分の間、滞在していたことを示す。さらに、図5の例では、利用者3が同日の12時00分00秒に位置ID「1000」の地点を通過したことを示す。このとき、利用者3は、位置ID「1000」の地点に3分の間、滞在していたことを示す。なお、図5の例では、端末ID「0001」を持つ端末装置30の通過履歴データを例示したが、実際には他の端末IDを持つ端末装置30の通過履歴データも併せて記憶される。
【0039】
方位記憶部14は、向き特定条件ごとに当該向き特定条件を満たした場合に利用者3が向くと特定できる絶対方位を対応付けて記憶する記憶部である。かかる方位記憶部14の一態様としては、位置ID、場所、向き特定条件、絶対方位および収容R/Wが対応付けられた方位データを採用できる。ここで言う「向き特定条件」とは、利用者3の向きを特定するために満たすべき条件を指し、例えば、ヒューリステックにより利用者3の向きが一方向に絞り込める条件が定義される。また、「収容R/W」とは、向き特定条件が適用される場所に収容されるR/W20のIDもしくはID群を指す。
【0040】
図6は、方位データの構成例を示す図である。図6の例では、位置ID「1000」のプラットホームには、R/W20A、R/W20B、R/W20CまたはR/W20DのいずれかのR/W20によって端末IDが検知されてから所定の閾値以上の重力加速度を検出するという向き特定条件が設定されている。これは、人が電車に乗り込む際には電車の出入り口とホームの段差をまたぐ時の重力加速度が歩行時よりも大きくなるというヒューリステックに基づいて設定される。この場合に特定される絶対方位は、ホームから電車の出入り口の正面に向かう方向、すなわち図6に示す例では「南」が設定される。かかる向き特定条件を満たした場合には、重力加速度が閾値以上となった地点が第1の地点と見做され、当該第1の地点で利用者3が向いている絶対方位が「南」であると後述の特定部17によって特定される。
【0041】
また、図6の例では、位置ID「0900」のエスカレータ下り口には、R/W20Mによって端末IDが読み取られるという向き特定条件が設定されている。これは、人がエスカレータから降りる際には正面を向いて降りるというヒューリステックに基づいて設定される。この場合に特定される絶対方位は、エスカレータの下り口の正面方向、すなわち図6に示す例では「東」が設定される。かかる向き特定条件を満たした場合には、R/W20Mによって読み取られた地点が第1の地点と見做され、当該第1の地点で利用者3が向いている絶対方位が「東」であると後述の特定部17によって特定される。
【0042】
推定結果記憶部15は、後述の推定部18による利用者3の向きの推定結果を記憶する記憶部である。かかる推定結果記憶部15の一態様としては、端末ID、位置ID、読取R/W、利用者の向きおよび滞在時間が対応付けられた推定結果データを採用できる。ここで言う「読取R/W」は、広告5に設置されたR/W20のうち端末IDを読み取ったR/W20を指す。なお、上記の推定結果データは、後述の推定部18によってサービス事業者サーバ70へ送信される。
【0043】
図7は、推定結果データの一例を示す図である。図7の例では、位置ID「1000」のプラットホーム5に設けられた広告5のうち広告5Cに設置されたR/W20Cによって端末装置30の端末ID「0001」が読み取られたことを示す。すなわち、端末ID「0001」の端末装置30を携帯する利用者3が2011年3月10日の11時00分00秒から11時03分00秒まで広告5Cの近辺に滞在することを示す。このとき、端末ID「0001」の端末装置30を携帯する利用者3は、北から見て東へ10度の方向に向いていることを示す。なお、図7の例では、北を基準とした相対角度で利用者3の向きを表現する場合を例示したが、利用者3の向きの表現方法はこれに限定されず、任意の方位を基準とした相対角度で利用者3の向きを表現することができる。また、開示の向き推定サーバ10は、利用者3の方向を推定した場所にある目印を基準に利用者3の向きを表現することもできる。
【0044】
これらセンサデータ記憶部12、通過履歴記憶部13、方位記憶部14及び推定結果記憶部15などの記憶部には、半導体メモリ素子や記憶装置を採用できる。例えば、半導体メモリ素子としては、VRAM(Video Random Access Memory)、RAM(Random Access Memory)、ROM(Read Only Memory)やフラッシュメモリ(flash memory)などが挙げられる。また、記憶装置としては、ハードディスク、光ディスクなどの記憶装置が挙げられる。
【0045】
記録部16は、データの記録を制御する処理部である。一態様としては、記録部16は、端末装置30の加速度センサ33Aから検出時刻及び加速度を受信した場合に、送信元の端末装置30の端末IDに検出時刻及び加速度を対応付けた加速度データをセンサデータ記憶部12へ記録する。また、記録部16は、端末装置30の角速度センサ33Bから検出時刻及び角速度を受信した場合に、それまでに受信していた角速度との間で時間積分することにより、初期状態の方位から相対的に移動した角度、すなわち相対方位角を算出する。その上で、記録部16は、送信元の端末装置30の端末IDに検出時刻、角速度及び相対方位角を対応付けた相対方位角データをセンサデータ記憶部12へ記録する。なお、記録部16は、加速度センサ33A及び角速度センサ33Bに加速度または角速度を通知させる頻度を任意の頻度に設定できるものとする。
【0046】
他の一態様としては、記録部16は、R/W20から位置ID、端末ID及び読取時刻を受信した場合に、位置ID、端末ID及び読取時刻を対応付けた通過履歴データを通過履歴記憶部13へ記録する。このとき、記録部16は、R/W20からの位置ID、端末ID及び読取時刻の通知が始まってから通知が終了するまでの期間を計測し、計測した期間を通過履歴データに追加して登録する。
【0047】
特定部17は、利用者3の向きを特定可能な第1の地点における利用者の向きを特定する処理部である。一態様としては、特定部17は、R/W20から位置ID、端末ID及び読取時刻が通知された場合に処理を起動し、方位記憶部14に記憶された向き特定条件のうち送信元のR/W20に対応する向き特定条件を読み出す。このとき、特定部17は、向き特定条件が「端末ID読取」である場合に、端末IDの読取時刻T0を向き特定時刻T1に設定する。このように端末IDの読取時刻T0を向き特定時刻T1とするのは、R/W20によって読み取られた地点を第1の地点と見做す向き特定条件が設定されているからである。一方、特定部17は、向き特定条件が「重力加速度」である場合に、センサデータ記憶部12に記憶された加速度データを参照して、R/W20によって端末IDが検知されてから所定の閾値以上の重力加速度が検出された時刻を向き特定時刻T1に設定する。その後、特定部17は、方位記憶部14を参照して、今回適用した向き特定条件を満たす地点の絶対方位を第1の地点における利用者3の向きとして特定する。
【0048】
このように向き特定時刻T1を設定しておくことによって、以降の処理で相対方位角データのうち第1の地点における相対方位角θ1を呼び出すことが可能になる。なお、ここでは、時刻をインデックスとして第1の地点における相対方位角θ1を呼び出す場合を例示したが、相対方位角と紐付けられた任意のデータ、例えば所定の位置を原点とした歩数をインデックスとして採用できる。
【0049】
推定部18は、第1の地点に対応する相対方位角および端末IDが読み取られた第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する処理部である。
【0050】
ここで、推定部18は、一態様として、利用者3によって携帯された端末装置30が鞄や着衣のポケットに収納された状態で利用者3の向きと端末装置30の向きとの相対関係が変化しないものと見做して第2の地点における利用者3の向きを推定する。
【0051】
これを説明すると、まず、推定部18は、特定部17によって特定された向き特定時刻T1を取得する。続いて、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角を読み出す。これによって、第1の地点における相対方位角θ1が取得されることになる。そして、推定部18は、第1の地点における利用者3の向きから第1の地点における相対方位角θ1を減算することにより、端末装置30がセンサ値の採取を開始する初期状態に利用者3が向いていると推定可能な方位を示す基軸を特定する。その後、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2を読み出す。これによって、第2の地点における相対方位角θ2が取得されることになる。その上で、推定部18は、先に算出した利用者3の基軸を形成する方位に第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きを推定する。その後、推定部18は、推定した推定結果、例えば利用者3の向きを始め、利用者3の端末ID、広告5が所在する位置IDと収容R/W、利用者3の滞在時間などを対応付けた推定結果データを推定結果記憶部15へ登録する。
【0052】
なお、ここでは、端末装置30の基軸を求めてから第2の地点における利用者3の向きを推定する場合を例示したが、利用者の向きの推定方法はこれに限定されない。例えば、推定部18は、第1の地点における利用者3の向きに第1の地点における相対方位角θ1と第2の地点における相対方位角θ2との差分を足し合わせることにより、第2の地点における利用者3の向きを推定することもできる。
【0053】
ここで、図8及び図9を用いて、利用者の向きを推定する具体例を説明する。図8は、プラットホーム5における利用者3の移動軌跡を模式化した図であり、図9は、図8に示した利用者3の移動軌跡における相対方位角と時刻の関係を示すグラフである。図8の例では、上方向が北、下方向が南、左方向が西、右方向が東である場合をあるものとして以下の説明を行う。なお、図9のグラフでは、縦軸が相対方位角(度)を表し、横軸が時刻(sec)を表すものとする。
【0054】
図8に示すように、利用者3は、広告5Aに設置されたR/W20A及び広告5Bに設置されたR/W20Bの読取範囲外を通過した後に、広告5Cに設置されたR/W20Cの読取範囲内に到達する。このR/W20Cの読取範囲への到達により、R/W20Cによって利用者3が携帯する端末装置30の端末IDの読取が開始された時刻がT0であるとする。この場合、図9に示すように、時刻t1(=T0)から時刻t2までの期間は相対方位角に変化がない。これは利用者3が広告5Cの前で立ち止まっていることを表す。その後、時刻t2を経過すると、利用者3の移動に伴って相対方位角が再び変化を始める。そして、時刻t3で再び相対方位角の変化がなくなり、時刻t4(=T1)で閾値以上の重力加速度が検出されたとする。
【0055】
この場合には、閾値以上の重力加速度が検出された時刻T1に対応する相対方位角が特定部17によって第1の地点における相対方位角θ1として設定される。さらに、図6に示した方位データによって定義されたように、重力加速度が閾値以上となった地点を第1の地点とし、当該第1の地点で利用者3が向いている絶対方位が「南」であると特定部17によって特定される。その後、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角θ1が推定部18によって読み出される。このとき、相対方位角θ1が150度であるとする。さらに、第1の地点における利用者3の向きDから第1の地点における相対方位角θ1を減算することにより、利用者3の基軸U(30度=D−θ1)が推定部18によって特定される。その後、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2が推定部18によって読み出される。このとき、相対方位角θ2が10度であるとする。その上で、先に算出した端末装置30の基軸Uに第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きAn(40度=U+θ2)が推定部18によって推定される。
【0056】
また、推定部18は、推定結果記憶部15に記憶された推定結果データをサービス事業者サーバ70へ送信する。このとき、推定部18は、滞在時間が所定の期間以上である推定結果データだけを絞り込んでサービス事業者サーバ70へ送信することもできる。
【0057】
なお、記録部16、特定部17及び推定部18には、各種の集積回路や電子回路を採用できる。例えば、集積回路としては、ASIC(Application Specific Integrated Circuit)が挙げられる。また、電子回路としては、CPU(Central Processing Unit)やMPU(Micro Processing Unit)などが挙げられる。
【0058】
[処理の流れ]
次に、本実施例に係る向き推定サーバの処理の流れについて説明する。なお、ここでは、特定部17によって実行される(1)特定処理を説明した後に、推定部18によって実行される(2)推定処理を説明することとする。
【0059】
(1)特定処理
図10は、実施例1に係る特定処理の手順を示すフローチャートである。図10に示す特定処理は、R/W20から位置ID、端末ID及び読取時刻を受信した場合に処理を起動する。
【0060】
図10に示すように、特定部17は、R/W20から位置ID、端末ID及び読取時刻を受信した場合(ステップS101肯定)に、方位記憶部14に記憶された向き特定条件のうち送信元のR/W20に対応する向き特定条件を読み出す(ステップS102)。
【0061】
このとき、向き特定条件が「端末ID読取」である場合(ステップS103肯定)には、特定部17は、端末IDの読取時刻T0を向き特定時刻T1に設定する(ステップS104)。
【0062】
一方、向き特定条件が「重力加速度」である場合(ステップS103否定)には、特定部17は、次のような処理を実行する。すなわち、特定部17は、センサデータ記憶部12に記憶された加速度データを参照して、R/W20によって端末IDが検知されてから所定の閾値以上の重力加速度が検出された時刻を向き特定時刻T1に設定する(ステップS105)。
【0063】
その後、特定部17は、方位記憶部14を参照して、向き特定時刻T1における利用者3の絶対方位を決定し(ステップS106)、処理を終了する。
【0064】
(2)推定処理
図11は、実施例1に係る推定処理の手順を示すフローチャートである。図11に示す推定処理は、図10に示すステップS106の処理が終了した場合に起動する。
【0065】
図11に示すように、推定部18は、特定部17によって特定された向き特定時刻T1を取得する(ステップS301)。続いて、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち向き特定時刻T1に対応する相対方位角を読み出す(ステップS302)。
【0066】
そして、推定部18は、第1の地点における利用者3の向きから第1の地点における相対方位角θ1を減算することにより、端末装置30がセンサ値の採取を開始する初期状態に利用者3が向いていると推定可能な方位を示す基軸を特定する(ステップS303)。
【0067】
その後、推定部18は、センサデータ記憶部12に相対方位角データとして記憶された相対方位角のうち端末IDの読取時刻T0に対応する相対方位角θ2を読み出す(ステップS304)。
【0068】
その上で、推定部18は、先に算出した利用者3の基軸を形成する方位に第2の地点における相対方位角θ2を加算することにより、第2の地点における利用者3の向きを推定し(ステップS305)、処理を終了する。
【0069】
[実施例1の効果]
上述してきたように、本実施例に係る向き推定サーバ10は、利用者3が接近した広告5の所在位置である第2の地点における利用者3の向きを特定するのに、ヒューリステックにより利用者3の向きを既知とできる第1の地点における利用者の向きを使用する。それゆえ、本実施例に係る向き推定サーバ10では、利用者3と端末装置30の関係を特定の位置関係に限定せずとも、第1の地点に対応する相対方位角および第2の地点の相対方位角との演算により第2の地点における利用者の向きを推定できる。
【0070】
よって、本実施例に係る向き推定サーバ10によれば、利用者3と端末装置30の関係が既知でなくとも、第2の地点における利用者の向きを推定できる。さらに、本実施例に係る向き推定サーバ10では、広告に設置されたカメラを用いて利用者3の向きを推定する場合よりも費用を抑えて利用者3の向きを推定できる。
【0071】
さらに、本実施例に係る向き推定サーバ10は、方位記憶部14を参照して、端末装置30を携帯する利用者3が移動により条件を満たした地点を第1の地点とし、該条件に対応付けられた絶対方位を第1の地点における利用者3の向きと特定する。このため、本実施例に係る向き推定サーバ10では、例えば、ヒューリステックを適用した条件を用いて第1の地点における利用者3の向きと特定できる。よって、本実施例に係る向き推定サーバ10は、利用者3の向きの推定精度を向上させることができる。
【実施例2】
【0072】
さて、これまで開示の装置に関する実施例について説明したが、本発明は上述した実施例以外にも、種々の異なる形態にて実施されてよいものである。そこで、以下では、本発明に含まれる他の実施例を説明する。
【0073】
[向きの推定ポイント]
また、上記の実施例1では、R/W20Cによって端末IDが読み取られた第2の地点における利用者3の向きを推定する場合を例示したが、他の地点における利用者3の向きを推定することもできる。一例としては、図8及び図9の例では、R/W20のうちR/W20Cだけに端末IDが読み取られた場合を説明したが、R/W20AやR/W20Bでも端末IDが読み取られた場合には、広告5A及び5Bにおける利用者3の向きを推定してもかまわない。他の一例としては、向き推定サーバ10は、センサデータ記憶部12に相対方位角が記憶された全ての地点を対象に利用者3の向きを推定することもできる。
【0074】
[位置検出センサ]
上記の実施例1では、端末装置30のICタグ31及びR/W20を用いて端末装置30の位置検出を行う場合を説明したが、開示のシステムはこれに限定されない。例えば、端末装置30は、GPS、デッドレコニングやRSSI(Received Signal Strength Indication)などの公知の位置検出センサを用いて端末装置30の位置を検出することができる。
【0075】
[方位検出センサ]
また、上記の実施例1では、角速度センサ33Bを用いて端末装置30の向きを検出する場合を例示したが、開示の装置はこれに限定されない。例えば、端末装置30は、角速度センサ及び地磁気センサの両方を搭載しておき、屋内では上記の実施例1と同様に角速度センサを用いるとともに、屋外では地磁気センサを用いて端末装置30の絶対方位を検出することとしてもよい。これによって、屋内で検出精度に不安がある地磁気センサの弱点を補いながら利用者の向きを検出することが可能になる。
【0076】
[端末装置のスタンドアローン]
また、上記の実施例1では、向き推定サーバ10が利用者3の向きを推定する場合を例示したが、開示の装置はこれに限定されない。例えば、端末装置30が利用者3の向きを単独で推定することもできる。この場合には、図2に示したセンサデータ記憶部12、通過履歴記憶部13、方位記憶部14、推定結果記憶部15、記録部16、特定部17及び推定部18と同様の機能を発揮する機能部を端末装置30に移植すればよい。
【0077】
[歩行検知]
また、端末装置30の向き又は利用者3の人の向きの相対関係を確定させる方法として、加速度センサのセンサ値によって利用者の歩行検知と進行方向を認識し、その時に端末装置30の地磁気センサにより検出された向きで相対関係を保存する方法を採用できる。なお、加速度センサの代わりにGPSを用いることもできる。
【0078】
ただし、電車などの乗り物に乗っている場合には、上下の加速度動作が少なく、一定の方向に進むなどが想定されるので、このような場合は、端末装置30の向き、利用者3の向きの相対関係を確定しないようにする。これによって、利用者3の向きと端末装置30の向きの相対関係を確定の精度を向上する。つまり、利用者にとって左右方向に進んでいるにもかかわらず、歩行状態と検知して、進行方向が利用者3の向きであると、誤った利用者3の向きを採用しないようにすることもできる。また、利用者の向きと端末の向きの相対関係は、一度確定しても利用者3が鞄を持ち替えるなどの動作を行うと相対関係がズレるので、利用者3の向きと端末装置30の向きの相対関係が確定した最新の相対関係を用いて、利用者の向きを推定するのが好ましい。
【0079】
このように、GPSや加速度センサなどの位置検出センサから得られる位置を用いて、複数の位置の軌跡から利用者の進行方向を特定可能な地点を第1の地点とし、該第1の地点における利用者の進行方向を利用者の向きと同定する。これによって、端末装置30がスタンドアローンで利用者3の向きを推定できる。
【0080】
[基軸の特定順序]
なお、上記の実施例1では、R/W20によって端末IDが読み取られてから、すなわち端末装置30が第2の地点に到達してから利用者3の基軸を特定する場合を説明したが、利用者3の基軸を先に特定することとしてもかまわない。
【0081】
[相対関係の保持]
また、開示の向き推定サーバ10では、利用者3の向きと端末装置30の向きとの相対関係、すなわち利用者3の基軸を保持しておくことにより、それ以降にR/W20によって端末IDが読み取られた地点における利用者3の向きを継続して推定することもできる。このとき、向き推定サーバ10は、利用者3が通過した第1の地点の中でも最新の第1の地点で特定された利用者3の基軸を保持するのが好ましい。
【0082】
[分散および統合]
また、図示した各装置の各構成要素は、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各装置の分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、記録部16、特定部17または推定部18を向き推定装置の外部装置としてネットワーク経由で接続するようにしてもよい。また、記録部16、特定部17または推定部18を別の装置がそれぞれ有し、ネットワーク接続されて協働することで、上記の向き推定サーバ10の機能を実現するようにしてもよい。
【0083】
[向き推定プログラム]
また、上記の実施例で説明した各種の処理は、予め用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータで実行することによって実現することができる。そこで、以下では、図12を用いて、上記の実施例と同様の機能を有する向き推定プログラムを実行するコンピュータの一例について説明する。
【0084】
図12は、実施例1及び実施例2に係る向き推定プログラムを実行するコンピュータの一例について説明するための図である。図12に示すように、コンピュータ100は、操作部110aと、スピーカ110bと、カメラ110cと、ディスプレイ120と、通信部130とを有する。さらに、このコンピュータ100は、CPU150と、ROM160と、HDD170と、RAM180と有する。これら110〜180の各部はバス140を介して接続される。
【0085】
HDD170には、図12に示すように、上記の実施例1で示した記録部16と、特定部17と、推定部18と同様の機能を発揮する向き推定プログラム170aが予め記憶される。この向き推定プログラム170aについては、図2に示した各々の記録部16、特定部17及び推定部18の各構成要素と同様、適宜統合又は分離しても良い。すなわち、HDD170に格納される各データは、常に全てのデータがHDD170に格納される必要はなく、処理に必要なデータのみがHDD170に格納されれば良い。
【0086】
そして、CPU150が、向き推定プログラム170aをHDD170から読み出してRAM180に展開する。これによって、図12に示すように、向き推定プログラム170aは、向き推定プロセス180aとして機能する。この向き推定プロセス180aは、HDD170から読み出した各種データを適宜RAM180上の自身に割り当てられた領域に展開し、この展開した各種データに基づいて各種処理を実行する。なお、向き推定プロセス180aは、図2に示した記録部16、特定部17及び推定部18にて実行される処理、例えば図10や図11に示す処理を含む。また、CPU150上で仮想的に実現される各処理部は、常に全ての処理部がCPU150上で動作する必要はなく、処理に必要な処理部のみが仮想的に実現されれば良い。
【0087】
なお、上記の向き推定プログラム170aについては、必ずしも最初からHDD170やROM160に記憶させておく必要はない。例えば、コンピュータ100に挿入されるフレキシブルディスク、いわゆるFD、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に各プログラムを記憶させる。そして、コンピュータ100がこれらの可搬用の物理媒体から各プログラムを取得して実行するようにしてもよい。また、公衆回線、インターネット、LAN、WANなどを介してコンピュータ100に接続される他のコンピュータまたはサーバ装置などに各プログラムを記憶させておき、コンピュータ100がこれらから各プログラムを取得して実行するようにしてもよい。
【符号の説明】
【0088】
1 向き推定システム
3 利用者
5 プラットホーム
5A,5B,5C,5D 広告
10 向き推定サーバ
11 通信I/F部
12 センサデータ記憶部
13 通過履歴記憶部
14 方位記憶部
15 推定結果記憶部
16 記録部
17 特定部
18 推定部
20A,20B,20C,20D R/W
30 端末装置
70 サービス事業者サーバ
【特許請求の範囲】
【請求項1】
コンピュータが、
利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録し、
前記利用者の向きを特定可能な第1の地点における利用者の向きを特定し、
記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する
各処理を実行することを特徴とする向き推定方法。
【請求項2】
前記第1の地点における利用者の向きを特定する処理として、
前記利用者の向きを特定する条件ごとに当該条件を満たした場合に利用者が向くと特定できる絶対方位を対応付けて記憶する方位記憶部を参照して、前記端末装置を携帯する利用者が移動により条件を満たした地点を第1の地点とし、該条件に対応付けられた絶対方位を前記第1の地点における利用者の向きと特定する処理を実行することを特徴とする請求項1に記載の向き推定方法。
【請求項3】
前記第1の地点における利用者の向きを特定する処理として、
前記端末装置の位置を検出する位置検出センサから得られる位置を用いて、複数の位置の軌跡から利用者の進行方向を特定可能な地点を第1の地点とし、該第1の地点における利用者の進行方向を利用者の向きと同定する処理を実行する請求項1に記載の向き推定方法。
【請求項4】
利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録する記録部と、
前記利用者の向きを特定可能な第1の地点における利用者の向きを特定する特定部と、
前記記録部によって記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記特定部によって特定された第1の地点における利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する推定部と
を有することを特徴とする向き推定装置。
【請求項5】
自装置の相対方位角を測定する方位センサと、
前記方位センサの出力から得られる相対方位角を記録する記録部と、
自装置を携帯する利用者の向きを特定可能な第1の地点における利用者の向きを特定する特定部と、
前記記録部によって記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記特定部によって特定された第1の地点における利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する推定部と
を有することを特徴とする端末装置。
【請求項1】
コンピュータが、
利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録し、
前記利用者の向きを特定可能な第1の地点における利用者の向きを特定し、
記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記第1の地点で特定された利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する
各処理を実行することを特徴とする向き推定方法。
【請求項2】
前記第1の地点における利用者の向きを特定する処理として、
前記利用者の向きを特定する条件ごとに当該条件を満たした場合に利用者が向くと特定できる絶対方位を対応付けて記憶する方位記憶部を参照して、前記端末装置を携帯する利用者が移動により条件を満たした地点を第1の地点とし、該条件に対応付けられた絶対方位を前記第1の地点における利用者の向きと特定する処理を実行することを特徴とする請求項1に記載の向き推定方法。
【請求項3】
前記第1の地点における利用者の向きを特定する処理として、
前記端末装置の位置を検出する位置検出センサから得られる位置を用いて、複数の位置の軌跡から利用者の進行方向を特定可能な地点を第1の地点とし、該第1の地点における利用者の進行方向を利用者の向きと同定する処理を実行する請求項1に記載の向き推定方法。
【請求項4】
利用者によって携帯される端末装置に搭載された方位センサの出力から得られる相対方位角を記録する記録部と、
前記利用者の向きを特定可能な第1の地点における利用者の向きを特定する特定部と、
前記記録部によって記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記特定部によって特定された第1の地点における利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する推定部と
を有することを特徴とする向き推定装置。
【請求項5】
自装置の相対方位角を測定する方位センサと、
前記方位センサの出力から得られる相対方位角を記録する記録部と、
自装置を携帯する利用者の向きを特定可能な第1の地点における利用者の向きを特定する特定部と、
前記記録部によって記録された相対方位角のうち前記第1の地点に対応する相対方位角および前記第1の地点とは異なる第2の地点の相対方位角と、前記特定部によって特定された第1の地点における利用者の向きとを用いて、当該第2の地点における利用者の向きを推定する推定部と
を有することを特徴とする端末装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−233831(P2012−233831A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−103806(P2011−103806)
【出願日】平成23年5月6日(2011.5.6)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年5月6日(2011.5.6)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]