
吸い込まれた汚染物から空気式制御システムを保護するための方法
空気式制御システムは、空気作動式機械の流体ラインに連結できる連結ラインを持つ少なくとも一つの流れ制御ライン、負圧源に連結できる負圧ライン、連結ラインと負圧ラインとの間の流れを制御する負圧バルブ、加圧流体源に連結できる圧力ライン、及び連結ラインと圧力ラインとの間の流れを制御する圧力バルブを含む。圧力マニホールドが圧力ライン及び連結ラインの第1部分を画成し、圧力バルブを支持し、負圧マニホールドが負圧ライン及び連結ラインの第2部分を画成し、負圧バルブを支持する。負圧マニホールドは、圧力マニホールドとは別個に交換されるようになっている。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、全体として空気式制御システムに関し、更に詳細には、半導体加工機器を加圧し排気するための空気式制御システムに関する。更に詳細には、本開示は、負圧によって吸い込まれた汚染物から空気式制御システムを保護するための方法に関する。
【背景技術】
【0002】
集積回路は、代表的には、導電体層、半導体層、又は絶縁層を順次付着させることによって、基板、特にシリコンウェーハ上に形成される。一連の層を順次付着し、エッチングするとき、基板の外層又は最外層即ち基板の露呈された層の段差が大きくなる。段差があるこのような表面には、集積回路製造プロセスの光リソグラフィー工程で問題を生じる。従って、基板表面を定期的に平坦化する必要がある。
【0003】
化学的機械研磨(CMP)は、受け入れられている1つの平坦化方法である。この平坦化方法は、代表的には、基板をキャリヤ又は研磨ヘッドに取り付けることを必要とする。基板の露呈された表面を回転研磨パッドに対して配置する。キャリヤヘッドは制御可能な負荷即ち圧力を基板に加え、基板を研磨パッドに押し付ける。少なくとも一つの化学反応性薬剤及び場合によっては研磨粒子を含む研磨スラリーを研磨パッドの表面に供給する。
【0004】
図1は、従来技術によるCMPキャリヤヘッドシステム10の一例の概略図を示す。キャリヤヘッドシステム10はそれ自体の軸線を中心として独立して回転し、回転モータ14をキャリヤヘッド16に連結するキャリヤ駆動シャフト12を有する。駆動モータ14の頂部に設けられた回転継手18が三つの流体ライン20a−20cを駆動シャフト12内のチャンネル22a−22cに連結する。これらのチャンネルは、次いで、キャリヤヘッド16の内部チャンバ(図示せず)に連結されている。周知のように、キャリヤヘッド16の内部チャンバは、少なくとも一部が弾性の嚢で形成されており、これらの嚢は、チャンバが加圧されたときに膨張し、チャンバ内に負圧が発生したときに収縮する。例えば、キャリヤヘッド16内のチャンバの加圧は、回転している研磨パッドに基板を押し付けるのに使用でき、これに対し、チャンバ内に負圧を発生することは、研磨パッドへ又はこのパッドからの基板の移送中に基板をキャリヤヘッド16に対して保持するための吸引力を提供するのに使用できる。
【0005】
圧力センサ及び制御可能なバルブを含んでいてもよい空気式制御システム30は、回転継手18から延びる流体ライン20a−20cを負圧源32及び圧力源34に連結する。空気式制御システム30はコンピュータ36に適切に接続されている。このコンピュータは、制御可能なバルブを作動してキャリヤヘッド16のチャンバを負圧源32及び圧力源34に交互に連結し、及びかくしてキャリヤヘッド16に空気圧を出力するようにプログラムしてある。図1の例示のCMPキャリヤヘッドシステム10では、システム10は三つの流体ライン20a−20c(例えば、外チャンバ、内チャンバ、及び保持リング)を含む。しかしながら、CMPキャリヤヘッドシステム10には、必要に応じて、及びキャリヤヘッド16に設けられたチャンバの数に応じて三つ以下又は三つ以上の流体ライン20a−20cが設けられていてもよい。
【0006】
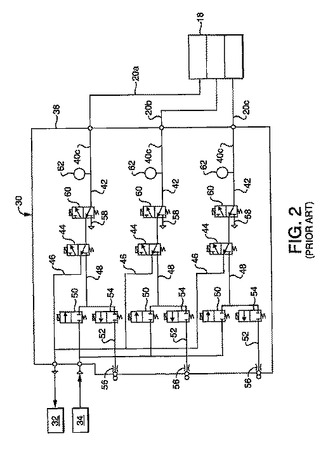
図2は、従来技術に従って形成された空気式制御システム30の構成要素の一例を示す。システム30は、全体として、三つの流れ制御ライン40a−40cを含み、これらの流れ制御ラインは、CMPキャリヤヘッドシステム10の回転継手18の三つの流体ライン20a−20cに夫々連結されている。勿論、システム30には、CMPキャリヤヘッドシステム10に含まれる流体ライン20a−20cの数に応じて三つ以下又は三つ以上の流れ制御ライン40a−40cが設けられていてもよい。
【0007】
システム30は、更に、三つの流れ制御ライン40a−40cの全ての部分を含む単一のマニホールド38を含む。各流れ制御ライン40a−40cは、CMPキャリヤヘッドシステム10の回転継手18の流体ライン20a−20cから延びる連結ライン42、及び連結ライン42を負圧ライン46又は圧力ライン48に交互に連結する少なくとも一つの「連結」バルブ44(例えば直接作動型バルブ)を含む。三つの流れ制御ライン40a−40cは、連結ライン42を大気に対して通気することもできるように通気バルブ60を通して連結ライン42に連結された第2通気ライン58を更に含んでいてもよい。
【0008】
負圧ライン46は、その名が示すように、少なくとも一つの負圧源32(図1参照)に連結されている。そのため、連結バルブ44が連結ライン42を負圧ライン46に連結したとき、CMPキャリヤヘッドシステム10の回転継手18の夫々の流体ライン20a−20c内に負圧が発生する。各圧力ライン48は「圧力」バルブ50(例えば、比例型バルブ)を含み、少なくとも一つの加圧ガス(例えば空気又は窒素)源34に図1に示すように連結される。各圧力ライン48は、ブリードバルブ54を更に含む。このブリードバルブ54は、ブリードライン52及びブリード流制流子56に連結されている。ブリードバルブ54及び圧力バルブ50はタンデムをなして作動する。両方が開放している場合には、圧力源34から、圧力バルブ50、ブリードバルブ54、ブリードライン52を通って流れ制流子56を通って出る流れが形成される。圧力バルブ50(例えば比例型バルブ)は、この流れを制御するため、開放と閉鎖との間で変化できる。連結バルブ44が連結ライン42を圧力ライン48に連結したとき、制御されたガス流がCMPキャリヤヘッドシステム10の夫々の流体ライン20a−20cに連結される。
【0009】
全ての流れ制御ライン40a−40cは、連結ライン42に第1圧力トランスジューサー62を備えている。図1及び図2に示す全てのバルブ44、50、54、60はコンピュータ36に接続されている。コンピュータ36はこれらのバルブの作動を制御する。図2に示す全ての圧力トランスジューサー62は、図1に示すコンピュータ36に圧力計測値を提供するように、コンピュータ36に接続されている。
【0010】
従来技術の空気式制御システム10と関連した一つの問題点は、CMP手順中にキャリヤヘッド16内に負圧が発生した場合に生じ、キャリヤヘッド16内の嚢が破損する。嚢が破損すると、CMP手順の部分として使用された研磨スラリーが空気式制御システム30に吸い込まれる。キャリヤヘッド16を再度使用できる前に嚢を交換しなければならず、研磨スラリーで汚染された空気式制御システム30を交換し、新たな制御システム30を再較正しなければならない。嚢の破損及びこれに続く空気式制御システム30の交換及び再較正のため、CMPキャリヤヘッドシステム10の停止時間が長くなる。
【0011】
嚢の破損中に空気式制御システム10がスラリーによって汚染されないように保護するため、幾つかの空気式制御システムには、嚢の破損時にスラリーが空気式制御システムに達しないようにするためのラインフィルタが設けられている。しかしながら、このようなフィルタは、空気式制御システム10の応答性及び排気性能を減少する。更に、これらのフィルタは経時的に詰まると、基板を研磨パッドへ及び研磨パッドから移送するときにキャリヤヘッド16により基板を保持するためにシステム10が発生する負圧を減少し又はなくしてしまう。負圧が減少したりなくなってしまった場合には、基板を落として損傷したり破壊してしまったりする。
【発明の開示】
【発明が解決しようとする課題】
【0012】
従って、例えばCMPキャリヤヘッドシステム等の半導体加工機器の加圧及び排気に使用できるがこれらに限定されない新規であり且つ改良された空気式制御システムが望ましい。好ましくは、新規であり且つ改良された空気式制御システムは、空気式制御システムを負圧による汚染物から保護するための装置及び方法を含む。
【課題を解決するための手段】
【0013】
本開示は、空気作動式機械の流体ラインに連結できる連結ライン、負圧源に連結できる負圧ライン、連結ラインと負圧ラインとの間の流れを制御する負圧バルブ、加圧流体源に連結できる圧力ライン、及び連結ラインと圧力ラインとの間の流れを制御する圧力バルブを含む少なくとも一つの流れ制御ラインを持つ、空気式制御システムを提供する。圧力マニホールドが圧力ライン及び連結ラインの少なくとも一部を画成し、圧力バルブを支持し、負圧マニホールドは、負圧ライン及び連結ラインの第2部分を画成し、負圧バルブを支持する。負圧マニホールドは、圧力マニホールドとは別個に交換されるようになっている。
【0014】
本開示のこの他の特徴及び利点のうち、空気式制御システムは、負圧ラインを通してシステムに吸い込まれた汚染物から圧力マニホールドを保護するようになっている。詳細には、システムは、システムに注入された汚染物を捕捉する別体の負圧マニホールドを含み、圧力マニホールドとは別個に交換できる。このようにして、汚染物が負圧ラインを通ってシステムに吸い込まれたとき、空気式制御システムの一部だけをクリーニングし及び/又は交換しさえすればよい。
【0015】
本開示の追加の特徴及び利点は、本開示を実施する上での最良の態様の単なる例示である以下の詳細な説明から当業者に容易に明らかになるであろう。理解されるように、本開示は、他の異なる実施例が可能であり、その幾つかの詳細は、本開示から逸脱することなく、様々な明らかな点で変更できる。従って、添付図面及び以下の説明は、例示であると考えられるべきであって、限定であると考えられるべきではない。
【0016】
同じ参照番号を付したエレメントが全図に亘って同様のエレメントを示す、添付図面を参照する。
【発明を実施するための最良の形態】
【0017】
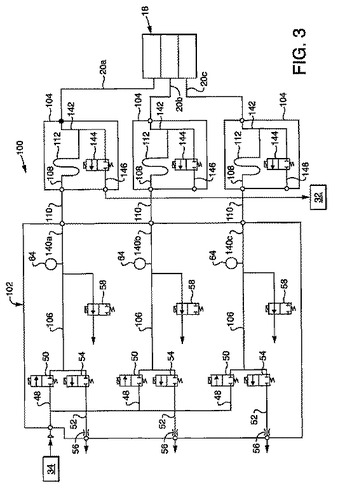
図3は、本発明に従って形成された空気式制御システム100の例示の実施例をCMP機械の回転ユニオン18に連結された状態で示す概略図である。しかしながら、本発明は、空気式制御システム100に関するのであって、CMP機械に関するのではなく、本発明の空気式制御システム100はCMP機械以外の空気圧作動式機械で使用できるということは理解されるべきである。
【0018】
空気式制御システム100は、このシステム100の複数の流れ制御ライン140a−140cの圧力ライン48を画成する圧力マニホールド102を含む。空気式制御システム100は、更に、複数の負圧マニホールド104を含む。各負圧マニホールド104は流れ制御ライン140a−140cの各々の負圧ライン146を画成する。負圧マニホールド104は、各々、圧力マニホールド102とは別個に交換されるようになっており且つ他の負圧マニホールド104から独立していてもよい。
【0019】
本開示のこの他の特徴及び利点のうち、空気式制御システム100は、負圧ライン146を通ってシステム100に吸い込まれた汚染物から圧力マニホールド102を保護するようになっている。詳細には、システム100は、このシステム100に注入された汚染物を各々捕捉する別々の負圧マニホールド104を含み、これらは圧力マニホールド102とは別個に交換できる。このようにして、汚染物が負圧ライン146の一つを通ってシステム10に吸い込まれたとき、空気式制御システム100の一部をクリーニングし及び/又は交換するだけでよく、交換されるべき部分には感度の高い圧力トランスジューサー62も圧力バルブ50も設けられていない。
【0020】
図3の例示の実施例では、圧力マニホールド102は、流れ制御ライン140a−140cの連結ライン142の第1部分106を画成し、これに対し、各負圧マニホールド104は、流れ制御ライン140a−140cの連結ライン142の第2部分108を画成する。連結ライン142の各々は、第1部分106と第2部分108とを連結する中間部分110を更に含む。これらの中間部分110は、圧力マニホールド102と負圧マニホールド104との間に連結されたパイプ又はチューブを含んでもよい。
【0021】
負圧マニホールド104の各々は、連結ライン142と負圧ライン146との間の流れを制御する負圧バルブ144を支持する。全ての負圧ライン146は合一し、単一の負圧源32に連結される。
【0022】
負圧マニホールド104の各々は、連結ライン142の第2部分108に液体/固体トラップ112を画成する。これらの液体/固体トラップ112は、更に、負圧ライン146によって吸い込まれた固体又は液体の汚染物が圧力マニホールド102に侵入しないようにする。図示の例示の実施例では、液体/固体トラップ112はJ型トラップ112を含む。別の態様では、液体/固体トラップをJ/D型トラップや液体フィルタ等の他の形体で提供してもよい。
【0023】
負圧マニホールド104は、アルミニウムやプラスチック等の適当な剛性を備えた軽量で丈夫な材料から製造できる本体を有する。アクリル等のプラスチックで製造されている場合には、負圧マニホールド104は、液体/固体トラップ112の閉塞を視覚的に確認できるように、又は光センサを使用して確認できるように、透明なプラスチックで形成できる。
【0024】
図3の例示の実施例では、圧力マニホールド102は、全ての流れ制御ラインについて圧力バルブ50を支持し、ブリードライン52を画成し、ブリードバルブ54及び通気バルブ58を支持する。圧力マニホールド102は、更に、ブリードライン52に流れ制流子56を画成する。
【0025】
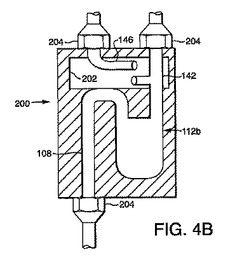
図4のAは、本発明に従って形成された負圧マニホールド200の別の例示の実施例の断面図である。図4のAの負圧マニホールド200は、図3の負圧マニホールド104と同様であり。そのため、同様のエレメントに同じ参照番号が付してある。図4のAの負圧マニホールド200は、更に、連結ライン142と負圧ライン146との間の流れを制御するための負圧バルブ144(輪郭で示す)を受け入れるための凹所202を含む。マニホールド200は、更に、連結ライン142と負圧ライン146を連結するためのねじ山を備えたニップル等の外部コネクタ204を含む。
【0026】
図4のBの負圧マニホールド200は図4のAの負圧マニホールド200とほぼ同じである。しかしながら、図4のAの負圧マニホールド200がJ型トラップ112aを備えているのに対し、図4のBの負圧マニホールド200はJ/D型トラップ112bを備えている。
【0027】
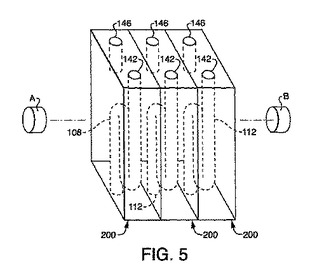
図4の例示の実施例では、負圧マニホールド200は透明プラスチック製の本体を含み、そのため液体/固体トラップ112内の閉塞を視覚的に確認でき、又は光センサを使用して確認できる。図5では、図4の複数の負圧マニホールド200は、側部と側部とを向き合わせて配置されており、そのため、所望であれば、単一の光源(「A」で示す)をマニホールド200の一方の側に配置でき、単一の光検出器(「B」で示す)をマニホールド200の他方の側に配置できる。次いで、光ビームを光源から全ての負圧マニホールド200を通して差し向けることができ、単一の光センサが全ての負圧マニホールドを通過した光を検出できる。光ビームが光センサによって検出されないとき、負圧マニホールド200の少なくとも一つの液体/固体トラップ112が閉塞していることが表示される。
【0028】
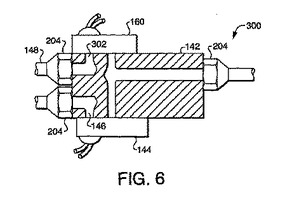
図6は、本発明に従って形成された負圧マニホールド300の追加の例示の実施例である。図6の負圧マニホールド300は、連結ライン142全体、圧力ライン148の一部302、及び負圧ライン146を画成する。連結ライン142と負圧ライン146との間の流れを制御するために負圧バルブ144を支持することに加え、負圧マニホールド300は、更に、圧力ライン148の連結ライン142と部分302との間の流れを制御する一次圧力バルブ160を支持する。この一次圧力バルブ160は、図3に示すように圧力マニホールド102で支持された圧力バルブ50の他に設けられる。
【0029】
図7は、側部と側部とを向き合わせて配置されており且つCMP機械の回転ユニオン18に連結された複数の図6の負圧マニホールド300を含むアッセンブリ304の例示の実施例を示す。ここには示してないけれども、負圧マニホールド300から延びる圧力ライン148は、図3の圧力マニホールド102と同様に圧力マニホールドに連結される。負圧ライン146は、全て、単一の液体/固体トラップ306に連結されており、このトラップが負圧源32に連結される。液体/固体トラップ306は、簡単には、固体及び液体を重力でトラップ306の底部に落下させて個々に集めることができる容器を含み、この際、ガスは負圧源32に入り続けることができる。トラップ306内の負圧レベルを監視するため、圧力トランスジューサー308が液体/固体トラップ306に連結されていてもよい。図示のように、他のライン(例えば圧力マニホールドの通気ライン)を負圧源32に連結するため、液体/固体トラップ306と負圧源32との間に継手310が設けられていてもよい。
【0030】
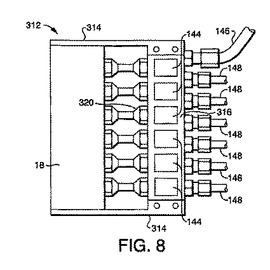
図8は、CMP機械の回転ユニオン18に連結された単一の負圧マニホールド320を含むアッセンブリ312の別の例示の実施例を示す。アッセンブリ312は、更に、負圧マニホールド300を回転ユニオン18に固定し、マニホールド300を互いに固定する様々なブラケット314、316を含む。
【0031】
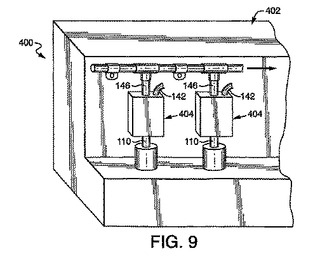
図9は、本発明に従って形成された空気式制御システム400の別の例示の実施例を示す。これは、本発明に従って形成された圧力マニホールド402及び負圧マニホールド404の別の例示の実施例を更に含む。図9のシステム400は、図3のシステム100と同様である。しかしながら、図9の負圧マニホールド404は図4のAに示す形式のマニホールドであり、圧力マニホールド402の棚に取り付けられ、連結ライン142を含み、圧力マニホールド402の圧力ライン110及びCMP機械の回転ユニオン(図示せず)に連結されている。負圧マニホールド404は、負圧源(図示せず)に連結されたシステム負圧ライン406に連結された負圧ライン146を更に含む。ここに示してないけれども、各負圧マニホールド404は、連結ライン142と負圧ライン146との間の流れを制御する負圧バルブを含む。各負圧マニホールド404は、液体/固体トラップを連結ラインに備えていてもよい。
【0032】
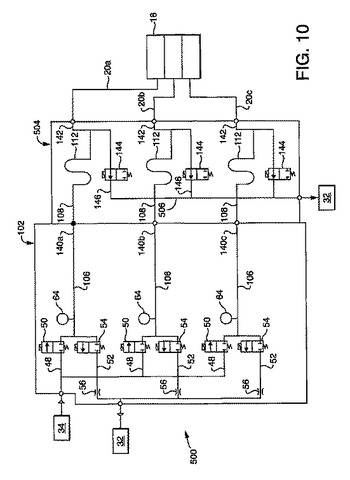
図10は、本発明に従って形成された空気式制御システム500の追加の例示の実施例をCMP機械の回転ユニオン18に連結された状態で示す。図10のシステム500は図3のシステム100と同様であり、同様のエレメントには同じ参照番号が付してある。しかしながら、図10のシステム500は単一の負圧マニホールド504を含み、このマニホールドは、全ての流れ制御ライン140a−140cについて、負圧ライン146を画成し、負圧バルブ144を支持する。単一の負圧マニホールド504は、更に、流れ制御ライン140a−140cの各々について液体/固体トラップ112を画成する。圧力マニホールド102は、負圧ライン146用の延長部506を画成する。
【0033】
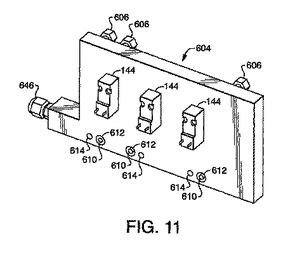
図11は、本発明に従って形成された負圧マニホールド604の更に別の例示の実施例を示す。図11の負圧マニホールド604は図10の負圧マニホールド504と同様であり、同様のエレメントには同じ参照番号が付してある。図11の負圧マニホールド604は、アルミニウムやプラスチック等の適当な剛性を備えた軽量で丈夫な材料から製造された本体を含む。プラスチックで製造されている場合には、負圧マニホールド604は、マニホールド604の液体/固体トラップ(図示せず)内の閉塞を視覚的に確認できるように、又は光センサを使用して確認できるように、透明なプラスチックで形成できる。負圧マニホールド604は、マニホールド604の内部連結ライン(図示せず)をCMP機械(図示せず)等の空気式動機械に連結するための三つの外部コネクタ606を含む。別の外部コネクタ646が内部負圧ライン(図示せず)を負圧源(図示せず)に連結する。マニホールド604は、更に、流れ連結ラインを図12及び図13に示すように圧力マニホールド602の圧力ラインに連結するための開口部610を含む。開口部610は、負圧マニホールド604と圧力マニホールド602との間にシールを提供するためにO−リングを受け入れるための凹所612によって各々取り囲まれている。負圧マニホールド604を圧力マニホールド602に固定するため、ボルト穴614が各開口部610と隣接して設けられており、マニホールド604を通って延びている。マニホールド604は、連結ラインと負圧ラインとの間の流れを制御するため、更に、負圧バルブ144を含む。
【0034】
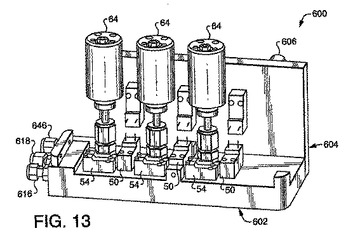
図12には、本発明による空気式制御システム600を形成するために本発明に従って形成された圧力マニホールド602の例示の実施例に連結された状態で図11の負圧マニホールド604が示してある。圧力マニホールド602は内部圧力ライン(図示せず)を圧力源に連結するための外部コネクタ616、及び内部通気ライン(図示せず)を負圧源に連結するための外部コネクタ618を含む。圧力トランスジューサー64がマニホールド602に取り付けられており、内部圧力ラインと流体連通しているのに対し、圧力バルブ50は負圧マニホールド604と内部圧力ラインとの間の流れを制御し、ブリードバルブ54が内部圧力ラインと内部通気ラインとの間の流れを制御する。
【0035】
従って、本発明は、負圧ラインを通ってシステムに吸い込まれた汚染物から圧力マニホールドを保護するようになった空気式制御システムを提供する。詳細には、本システムは、システムに注入された汚染物を捕捉する、圧力マニホールドとは別個に交換できる別の負圧マニホールドを含む。このようにして、負圧ラインを通って汚染物がシステムに吸い込まれたとき、空気式制御システムの一部だけをクリーニング及び/又は交換しさえすればよい。
【0036】
以上説明した例示の実施例は単なる例示として提供されたものであって、限定ではなく、当業者は、本開示の精神又は範囲から逸脱することなく、特許請求の範囲に記載した最も広い特徴内で様々な変形、組み合わせ、及び代替を行うことができる。
【図面の簡単な説明】
【0037】
【図1】従来技術による空気式制御システムの一例に連結された状態で示す回転ユニオンを持つ従来技術による化学的機械研磨(CMP)機械の一例の部分断面正面図である。
【図2】図1の空気式制御システム及び回転ユニオンの概略図である。
【図3】本発明に従って形成された負圧マニホールドの例示の実施例を含む空気式制御システムの例示の実施例をCMP機械の回転ユニオンに連結された状態で示す、概略図である。
【図4−A】本発明に従って形成された負圧マニホールドの別の例示の実施例の断面図である。
【図4−B】本発明に従って形成された負圧マニホールドの別の例示の実施例の断面図である。
【図5】側部と側部とを向き合わせて配置した図4の複数の負圧マニホールドを示す斜視図である。
【図6】本発明に従って形成された負圧マニホールドの追加の例示の実施例の断面図である。
【図7】側部と側部とを向き合わせて配置されており且つCMP機械の回転ユニオンと負圧トラップとの間に連結された図6の複数の負圧マニホールドを示す側面図である。
【図8】CMP機械の回転ユニオンに連結されており且つブラケットによって互いに固定された負圧マニホールドを示す側面図である。
【図9】本発明に従って形成された負圧マニホールドの別の例示の実施例を含む、空気式制御システムの例示の実施例の斜視図である。
【図10】本発明に従って形成された空気式制御システムの追加の例示の実施例をCMP機械の回転ユニオンに連結された状態で示す、概略図である。
【図11】本発明に従って形成された負圧マニホールドの別の例示の実施例の斜視図である。
【図12】図11の負圧マニホールドを本発明に従って形成された圧力マニホールドの例示の実施例に連結した状態で示す、斜視図である。
【図13】負圧マニホールド及び図12の圧力マニホールドの斜視図である。
【符号の説明】
【0038】
32 負圧源 48 圧力ライン
50 圧力バルブ 52 ブリードライン
54 ブリードバルブ 56 流れ制流子
58 通気バルブ 62 圧力トランスジューサー
100 空気式制御システム 102 圧力マニホールド
104 負圧マニホールド 106 第1部分
108 第2部分 110 中間部分
112 液体/固体トラップ 140a−140c 流れ制御ライン
142 連結ライン 144 負圧バルブ
146 負圧ライン
【技術分野】
【0001】
本開示は、全体として空気式制御システムに関し、更に詳細には、半導体加工機器を加圧し排気するための空気式制御システムに関する。更に詳細には、本開示は、負圧によって吸い込まれた汚染物から空気式制御システムを保護するための方法に関する。
【背景技術】
【0002】
集積回路は、代表的には、導電体層、半導体層、又は絶縁層を順次付着させることによって、基板、特にシリコンウェーハ上に形成される。一連の層を順次付着し、エッチングするとき、基板の外層又は最外層即ち基板の露呈された層の段差が大きくなる。段差があるこのような表面には、集積回路製造プロセスの光リソグラフィー工程で問題を生じる。従って、基板表面を定期的に平坦化する必要がある。
【0003】
化学的機械研磨(CMP)は、受け入れられている1つの平坦化方法である。この平坦化方法は、代表的には、基板をキャリヤ又は研磨ヘッドに取り付けることを必要とする。基板の露呈された表面を回転研磨パッドに対して配置する。キャリヤヘッドは制御可能な負荷即ち圧力を基板に加え、基板を研磨パッドに押し付ける。少なくとも一つの化学反応性薬剤及び場合によっては研磨粒子を含む研磨スラリーを研磨パッドの表面に供給する。
【0004】
図1は、従来技術によるCMPキャリヤヘッドシステム10の一例の概略図を示す。キャリヤヘッドシステム10はそれ自体の軸線を中心として独立して回転し、回転モータ14をキャリヤヘッド16に連結するキャリヤ駆動シャフト12を有する。駆動モータ14の頂部に設けられた回転継手18が三つの流体ライン20a−20cを駆動シャフト12内のチャンネル22a−22cに連結する。これらのチャンネルは、次いで、キャリヤヘッド16の内部チャンバ(図示せず)に連結されている。周知のように、キャリヤヘッド16の内部チャンバは、少なくとも一部が弾性の嚢で形成されており、これらの嚢は、チャンバが加圧されたときに膨張し、チャンバ内に負圧が発生したときに収縮する。例えば、キャリヤヘッド16内のチャンバの加圧は、回転している研磨パッドに基板を押し付けるのに使用でき、これに対し、チャンバ内に負圧を発生することは、研磨パッドへ又はこのパッドからの基板の移送中に基板をキャリヤヘッド16に対して保持するための吸引力を提供するのに使用できる。
【0005】
圧力センサ及び制御可能なバルブを含んでいてもよい空気式制御システム30は、回転継手18から延びる流体ライン20a−20cを負圧源32及び圧力源34に連結する。空気式制御システム30はコンピュータ36に適切に接続されている。このコンピュータは、制御可能なバルブを作動してキャリヤヘッド16のチャンバを負圧源32及び圧力源34に交互に連結し、及びかくしてキャリヤヘッド16に空気圧を出力するようにプログラムしてある。図1の例示のCMPキャリヤヘッドシステム10では、システム10は三つの流体ライン20a−20c(例えば、外チャンバ、内チャンバ、及び保持リング)を含む。しかしながら、CMPキャリヤヘッドシステム10には、必要に応じて、及びキャリヤヘッド16に設けられたチャンバの数に応じて三つ以下又は三つ以上の流体ライン20a−20cが設けられていてもよい。
【0006】
図2は、従来技術に従って形成された空気式制御システム30の構成要素の一例を示す。システム30は、全体として、三つの流れ制御ライン40a−40cを含み、これらの流れ制御ラインは、CMPキャリヤヘッドシステム10の回転継手18の三つの流体ライン20a−20cに夫々連結されている。勿論、システム30には、CMPキャリヤヘッドシステム10に含まれる流体ライン20a−20cの数に応じて三つ以下又は三つ以上の流れ制御ライン40a−40cが設けられていてもよい。
【0007】
システム30は、更に、三つの流れ制御ライン40a−40cの全ての部分を含む単一のマニホールド38を含む。各流れ制御ライン40a−40cは、CMPキャリヤヘッドシステム10の回転継手18の流体ライン20a−20cから延びる連結ライン42、及び連結ライン42を負圧ライン46又は圧力ライン48に交互に連結する少なくとも一つの「連結」バルブ44(例えば直接作動型バルブ)を含む。三つの流れ制御ライン40a−40cは、連結ライン42を大気に対して通気することもできるように通気バルブ60を通して連結ライン42に連結された第2通気ライン58を更に含んでいてもよい。
【0008】
負圧ライン46は、その名が示すように、少なくとも一つの負圧源32(図1参照)に連結されている。そのため、連結バルブ44が連結ライン42を負圧ライン46に連結したとき、CMPキャリヤヘッドシステム10の回転継手18の夫々の流体ライン20a−20c内に負圧が発生する。各圧力ライン48は「圧力」バルブ50(例えば、比例型バルブ)を含み、少なくとも一つの加圧ガス(例えば空気又は窒素)源34に図1に示すように連結される。各圧力ライン48は、ブリードバルブ54を更に含む。このブリードバルブ54は、ブリードライン52及びブリード流制流子56に連結されている。ブリードバルブ54及び圧力バルブ50はタンデムをなして作動する。両方が開放している場合には、圧力源34から、圧力バルブ50、ブリードバルブ54、ブリードライン52を通って流れ制流子56を通って出る流れが形成される。圧力バルブ50(例えば比例型バルブ)は、この流れを制御するため、開放と閉鎖との間で変化できる。連結バルブ44が連結ライン42を圧力ライン48に連結したとき、制御されたガス流がCMPキャリヤヘッドシステム10の夫々の流体ライン20a−20cに連結される。
【0009】
全ての流れ制御ライン40a−40cは、連結ライン42に第1圧力トランスジューサー62を備えている。図1及び図2に示す全てのバルブ44、50、54、60はコンピュータ36に接続されている。コンピュータ36はこれらのバルブの作動を制御する。図2に示す全ての圧力トランスジューサー62は、図1に示すコンピュータ36に圧力計測値を提供するように、コンピュータ36に接続されている。
【0010】
従来技術の空気式制御システム10と関連した一つの問題点は、CMP手順中にキャリヤヘッド16内に負圧が発生した場合に生じ、キャリヤヘッド16内の嚢が破損する。嚢が破損すると、CMP手順の部分として使用された研磨スラリーが空気式制御システム30に吸い込まれる。キャリヤヘッド16を再度使用できる前に嚢を交換しなければならず、研磨スラリーで汚染された空気式制御システム30を交換し、新たな制御システム30を再較正しなければならない。嚢の破損及びこれに続く空気式制御システム30の交換及び再較正のため、CMPキャリヤヘッドシステム10の停止時間が長くなる。
【0011】
嚢の破損中に空気式制御システム10がスラリーによって汚染されないように保護するため、幾つかの空気式制御システムには、嚢の破損時にスラリーが空気式制御システムに達しないようにするためのラインフィルタが設けられている。しかしながら、このようなフィルタは、空気式制御システム10の応答性及び排気性能を減少する。更に、これらのフィルタは経時的に詰まると、基板を研磨パッドへ及び研磨パッドから移送するときにキャリヤヘッド16により基板を保持するためにシステム10が発生する負圧を減少し又はなくしてしまう。負圧が減少したりなくなってしまった場合には、基板を落として損傷したり破壊してしまったりする。
【発明の開示】
【発明が解決しようとする課題】
【0012】
従って、例えばCMPキャリヤヘッドシステム等の半導体加工機器の加圧及び排気に使用できるがこれらに限定されない新規であり且つ改良された空気式制御システムが望ましい。好ましくは、新規であり且つ改良された空気式制御システムは、空気式制御システムを負圧による汚染物から保護するための装置及び方法を含む。
【課題を解決するための手段】
【0013】
本開示は、空気作動式機械の流体ラインに連結できる連結ライン、負圧源に連結できる負圧ライン、連結ラインと負圧ラインとの間の流れを制御する負圧バルブ、加圧流体源に連結できる圧力ライン、及び連結ラインと圧力ラインとの間の流れを制御する圧力バルブを含む少なくとも一つの流れ制御ラインを持つ、空気式制御システムを提供する。圧力マニホールドが圧力ライン及び連結ラインの少なくとも一部を画成し、圧力バルブを支持し、負圧マニホールドは、負圧ライン及び連結ラインの第2部分を画成し、負圧バルブを支持する。負圧マニホールドは、圧力マニホールドとは別個に交換されるようになっている。
【0014】
本開示のこの他の特徴及び利点のうち、空気式制御システムは、負圧ラインを通してシステムに吸い込まれた汚染物から圧力マニホールドを保護するようになっている。詳細には、システムは、システムに注入された汚染物を捕捉する別体の負圧マニホールドを含み、圧力マニホールドとは別個に交換できる。このようにして、汚染物が負圧ラインを通ってシステムに吸い込まれたとき、空気式制御システムの一部だけをクリーニングし及び/又は交換しさえすればよい。
【0015】
本開示の追加の特徴及び利点は、本開示を実施する上での最良の態様の単なる例示である以下の詳細な説明から当業者に容易に明らかになるであろう。理解されるように、本開示は、他の異なる実施例が可能であり、その幾つかの詳細は、本開示から逸脱することなく、様々な明らかな点で変更できる。従って、添付図面及び以下の説明は、例示であると考えられるべきであって、限定であると考えられるべきではない。
【0016】
同じ参照番号を付したエレメントが全図に亘って同様のエレメントを示す、添付図面を参照する。
【発明を実施するための最良の形態】
【0017】
図3は、本発明に従って形成された空気式制御システム100の例示の実施例をCMP機械の回転ユニオン18に連結された状態で示す概略図である。しかしながら、本発明は、空気式制御システム100に関するのであって、CMP機械に関するのではなく、本発明の空気式制御システム100はCMP機械以外の空気圧作動式機械で使用できるということは理解されるべきである。
【0018】
空気式制御システム100は、このシステム100の複数の流れ制御ライン140a−140cの圧力ライン48を画成する圧力マニホールド102を含む。空気式制御システム100は、更に、複数の負圧マニホールド104を含む。各負圧マニホールド104は流れ制御ライン140a−140cの各々の負圧ライン146を画成する。負圧マニホールド104は、各々、圧力マニホールド102とは別個に交換されるようになっており且つ他の負圧マニホールド104から独立していてもよい。
【0019】
本開示のこの他の特徴及び利点のうち、空気式制御システム100は、負圧ライン146を通ってシステム100に吸い込まれた汚染物から圧力マニホールド102を保護するようになっている。詳細には、システム100は、このシステム100に注入された汚染物を各々捕捉する別々の負圧マニホールド104を含み、これらは圧力マニホールド102とは別個に交換できる。このようにして、汚染物が負圧ライン146の一つを通ってシステム10に吸い込まれたとき、空気式制御システム100の一部をクリーニングし及び/又は交換するだけでよく、交換されるべき部分には感度の高い圧力トランスジューサー62も圧力バルブ50も設けられていない。
【0020】
図3の例示の実施例では、圧力マニホールド102は、流れ制御ライン140a−140cの連結ライン142の第1部分106を画成し、これに対し、各負圧マニホールド104は、流れ制御ライン140a−140cの連結ライン142の第2部分108を画成する。連結ライン142の各々は、第1部分106と第2部分108とを連結する中間部分110を更に含む。これらの中間部分110は、圧力マニホールド102と負圧マニホールド104との間に連結されたパイプ又はチューブを含んでもよい。
【0021】
負圧マニホールド104の各々は、連結ライン142と負圧ライン146との間の流れを制御する負圧バルブ144を支持する。全ての負圧ライン146は合一し、単一の負圧源32に連結される。
【0022】
負圧マニホールド104の各々は、連結ライン142の第2部分108に液体/固体トラップ112を画成する。これらの液体/固体トラップ112は、更に、負圧ライン146によって吸い込まれた固体又は液体の汚染物が圧力マニホールド102に侵入しないようにする。図示の例示の実施例では、液体/固体トラップ112はJ型トラップ112を含む。別の態様では、液体/固体トラップをJ/D型トラップや液体フィルタ等の他の形体で提供してもよい。
【0023】
負圧マニホールド104は、アルミニウムやプラスチック等の適当な剛性を備えた軽量で丈夫な材料から製造できる本体を有する。アクリル等のプラスチックで製造されている場合には、負圧マニホールド104は、液体/固体トラップ112の閉塞を視覚的に確認できるように、又は光センサを使用して確認できるように、透明なプラスチックで形成できる。
【0024】
図3の例示の実施例では、圧力マニホールド102は、全ての流れ制御ラインについて圧力バルブ50を支持し、ブリードライン52を画成し、ブリードバルブ54及び通気バルブ58を支持する。圧力マニホールド102は、更に、ブリードライン52に流れ制流子56を画成する。
【0025】
図4のAは、本発明に従って形成された負圧マニホールド200の別の例示の実施例の断面図である。図4のAの負圧マニホールド200は、図3の負圧マニホールド104と同様であり。そのため、同様のエレメントに同じ参照番号が付してある。図4のAの負圧マニホールド200は、更に、連結ライン142と負圧ライン146との間の流れを制御するための負圧バルブ144(輪郭で示す)を受け入れるための凹所202を含む。マニホールド200は、更に、連結ライン142と負圧ライン146を連結するためのねじ山を備えたニップル等の外部コネクタ204を含む。
【0026】
図4のBの負圧マニホールド200は図4のAの負圧マニホールド200とほぼ同じである。しかしながら、図4のAの負圧マニホールド200がJ型トラップ112aを備えているのに対し、図4のBの負圧マニホールド200はJ/D型トラップ112bを備えている。
【0027】
図4の例示の実施例では、負圧マニホールド200は透明プラスチック製の本体を含み、そのため液体/固体トラップ112内の閉塞を視覚的に確認でき、又は光センサを使用して確認できる。図5では、図4の複数の負圧マニホールド200は、側部と側部とを向き合わせて配置されており、そのため、所望であれば、単一の光源(「A」で示す)をマニホールド200の一方の側に配置でき、単一の光検出器(「B」で示す)をマニホールド200の他方の側に配置できる。次いで、光ビームを光源から全ての負圧マニホールド200を通して差し向けることができ、単一の光センサが全ての負圧マニホールドを通過した光を検出できる。光ビームが光センサによって検出されないとき、負圧マニホールド200の少なくとも一つの液体/固体トラップ112が閉塞していることが表示される。
【0028】
図6は、本発明に従って形成された負圧マニホールド300の追加の例示の実施例である。図6の負圧マニホールド300は、連結ライン142全体、圧力ライン148の一部302、及び負圧ライン146を画成する。連結ライン142と負圧ライン146との間の流れを制御するために負圧バルブ144を支持することに加え、負圧マニホールド300は、更に、圧力ライン148の連結ライン142と部分302との間の流れを制御する一次圧力バルブ160を支持する。この一次圧力バルブ160は、図3に示すように圧力マニホールド102で支持された圧力バルブ50の他に設けられる。
【0029】
図7は、側部と側部とを向き合わせて配置されており且つCMP機械の回転ユニオン18に連結された複数の図6の負圧マニホールド300を含むアッセンブリ304の例示の実施例を示す。ここには示してないけれども、負圧マニホールド300から延びる圧力ライン148は、図3の圧力マニホールド102と同様に圧力マニホールドに連結される。負圧ライン146は、全て、単一の液体/固体トラップ306に連結されており、このトラップが負圧源32に連結される。液体/固体トラップ306は、簡単には、固体及び液体を重力でトラップ306の底部に落下させて個々に集めることができる容器を含み、この際、ガスは負圧源32に入り続けることができる。トラップ306内の負圧レベルを監視するため、圧力トランスジューサー308が液体/固体トラップ306に連結されていてもよい。図示のように、他のライン(例えば圧力マニホールドの通気ライン)を負圧源32に連結するため、液体/固体トラップ306と負圧源32との間に継手310が設けられていてもよい。
【0030】
図8は、CMP機械の回転ユニオン18に連結された単一の負圧マニホールド320を含むアッセンブリ312の別の例示の実施例を示す。アッセンブリ312は、更に、負圧マニホールド300を回転ユニオン18に固定し、マニホールド300を互いに固定する様々なブラケット314、316を含む。
【0031】
図9は、本発明に従って形成された空気式制御システム400の別の例示の実施例を示す。これは、本発明に従って形成された圧力マニホールド402及び負圧マニホールド404の別の例示の実施例を更に含む。図9のシステム400は、図3のシステム100と同様である。しかしながら、図9の負圧マニホールド404は図4のAに示す形式のマニホールドであり、圧力マニホールド402の棚に取り付けられ、連結ライン142を含み、圧力マニホールド402の圧力ライン110及びCMP機械の回転ユニオン(図示せず)に連結されている。負圧マニホールド404は、負圧源(図示せず)に連結されたシステム負圧ライン406に連結された負圧ライン146を更に含む。ここに示してないけれども、各負圧マニホールド404は、連結ライン142と負圧ライン146との間の流れを制御する負圧バルブを含む。各負圧マニホールド404は、液体/固体トラップを連結ラインに備えていてもよい。
【0032】
図10は、本発明に従って形成された空気式制御システム500の追加の例示の実施例をCMP機械の回転ユニオン18に連結された状態で示す。図10のシステム500は図3のシステム100と同様であり、同様のエレメントには同じ参照番号が付してある。しかしながら、図10のシステム500は単一の負圧マニホールド504を含み、このマニホールドは、全ての流れ制御ライン140a−140cについて、負圧ライン146を画成し、負圧バルブ144を支持する。単一の負圧マニホールド504は、更に、流れ制御ライン140a−140cの各々について液体/固体トラップ112を画成する。圧力マニホールド102は、負圧ライン146用の延長部506を画成する。
【0033】
図11は、本発明に従って形成された負圧マニホールド604の更に別の例示の実施例を示す。図11の負圧マニホールド604は図10の負圧マニホールド504と同様であり、同様のエレメントには同じ参照番号が付してある。図11の負圧マニホールド604は、アルミニウムやプラスチック等の適当な剛性を備えた軽量で丈夫な材料から製造された本体を含む。プラスチックで製造されている場合には、負圧マニホールド604は、マニホールド604の液体/固体トラップ(図示せず)内の閉塞を視覚的に確認できるように、又は光センサを使用して確認できるように、透明なプラスチックで形成できる。負圧マニホールド604は、マニホールド604の内部連結ライン(図示せず)をCMP機械(図示せず)等の空気式動機械に連結するための三つの外部コネクタ606を含む。別の外部コネクタ646が内部負圧ライン(図示せず)を負圧源(図示せず)に連結する。マニホールド604は、更に、流れ連結ラインを図12及び図13に示すように圧力マニホールド602の圧力ラインに連結するための開口部610を含む。開口部610は、負圧マニホールド604と圧力マニホールド602との間にシールを提供するためにO−リングを受け入れるための凹所612によって各々取り囲まれている。負圧マニホールド604を圧力マニホールド602に固定するため、ボルト穴614が各開口部610と隣接して設けられており、マニホールド604を通って延びている。マニホールド604は、連結ラインと負圧ラインとの間の流れを制御するため、更に、負圧バルブ144を含む。
【0034】
図12には、本発明による空気式制御システム600を形成するために本発明に従って形成された圧力マニホールド602の例示の実施例に連結された状態で図11の負圧マニホールド604が示してある。圧力マニホールド602は内部圧力ライン(図示せず)を圧力源に連結するための外部コネクタ616、及び内部通気ライン(図示せず)を負圧源に連結するための外部コネクタ618を含む。圧力トランスジューサー64がマニホールド602に取り付けられており、内部圧力ラインと流体連通しているのに対し、圧力バルブ50は負圧マニホールド604と内部圧力ラインとの間の流れを制御し、ブリードバルブ54が内部圧力ラインと内部通気ラインとの間の流れを制御する。
【0035】
従って、本発明は、負圧ラインを通ってシステムに吸い込まれた汚染物から圧力マニホールドを保護するようになった空気式制御システムを提供する。詳細には、本システムは、システムに注入された汚染物を捕捉する、圧力マニホールドとは別個に交換できる別の負圧マニホールドを含む。このようにして、負圧ラインを通って汚染物がシステムに吸い込まれたとき、空気式制御システムの一部だけをクリーニング及び/又は交換しさえすればよい。
【0036】
以上説明した例示の実施例は単なる例示として提供されたものであって、限定ではなく、当業者は、本開示の精神又は範囲から逸脱することなく、特許請求の範囲に記載した最も広い特徴内で様々な変形、組み合わせ、及び代替を行うことができる。
【図面の簡単な説明】
【0037】
【図1】従来技術による空気式制御システムの一例に連結された状態で示す回転ユニオンを持つ従来技術による化学的機械研磨(CMP)機械の一例の部分断面正面図である。
【図2】図1の空気式制御システム及び回転ユニオンの概略図である。
【図3】本発明に従って形成された負圧マニホールドの例示の実施例を含む空気式制御システムの例示の実施例をCMP機械の回転ユニオンに連結された状態で示す、概略図である。
【図4−A】本発明に従って形成された負圧マニホールドの別の例示の実施例の断面図である。
【図4−B】本発明に従って形成された負圧マニホールドの別の例示の実施例の断面図である。
【図5】側部と側部とを向き合わせて配置した図4の複数の負圧マニホールドを示す斜視図である。
【図6】本発明に従って形成された負圧マニホールドの追加の例示の実施例の断面図である。
【図7】側部と側部とを向き合わせて配置されており且つCMP機械の回転ユニオンと負圧トラップとの間に連結された図6の複数の負圧マニホールドを示す側面図である。
【図8】CMP機械の回転ユニオンに連結されており且つブラケットによって互いに固定された負圧マニホールドを示す側面図である。
【図9】本発明に従って形成された負圧マニホールドの別の例示の実施例を含む、空気式制御システムの例示の実施例の斜視図である。
【図10】本発明に従って形成された空気式制御システムの追加の例示の実施例をCMP機械の回転ユニオンに連結された状態で示す、概略図である。
【図11】本発明に従って形成された負圧マニホールドの別の例示の実施例の斜視図である。
【図12】図11の負圧マニホールドを本発明に従って形成された圧力マニホールドの例示の実施例に連結した状態で示す、斜視図である。
【図13】負圧マニホールド及び図12の圧力マニホールドの斜視図である。
【符号の説明】
【0038】
32 負圧源 48 圧力ライン
50 圧力バルブ 52 ブリードライン
54 ブリードバルブ 56 流れ制流子
58 通気バルブ 62 圧力トランスジューサー
100 空気式制御システム 102 圧力マニホールド
104 負圧マニホールド 106 第1部分
108 第2部分 110 中間部分
112 液体/固体トラップ 140a−140c 流れ制御ライン
142 連結ライン 144 負圧バルブ
146 負圧ライン
【特許請求の範囲】
【請求項1】
空気式制御システムにおいて、
少なくとも一つの流れ制御ラインであって、
空気作動式機械の流体ラインに連結できる連結ライン、
前記連結ラインに連結されており且つ負圧源に連結できる負圧ライン、
前記負圧ラインを通る流れを制御する負圧バルブ、
前記連結ラインに連結されており且つ加圧流体源に連結できる圧力ライン、及び
前記圧力ラインを通る流れを制御する圧力バルブ、を含む流れ制御ラインと、
前記圧力ラインの少なくとも一部を画成し、前記圧力バルブを支持する圧力マニホールドと、
前記負圧ラインの少なくとも一部を画成し、前記負圧バルブを支持し、前記圧力マニホールドとは別個に交換されるようになった負圧マニホールドとを含む、空気式制御システム。
【請求項2】
請求項1に記載のシステムにおいて、前記流れ制御ラインの前記連結ラインは液体/固体トラップを含む、システム。
【請求項3】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、J型トラップを含む、システム。
【請求項4】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、J/D型トラップを含む、システム。
【請求項5】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、前記負圧マニホールドによって画成される、システム。
【請求項6】
請求項1に記載のシステムにおいて、複数の流れ制御ラインを含む、システム。
【請求項7】
請求項6に記載のシステムにおいて、前記圧力マニホールドは、前記圧力ラインの少なくとも一部を画成し、全ての流れ制御ラインについて前記圧力バルブを支持する、システム。
【請求項8】
請求項6に記載のシステムにおいて、前記負圧マニホールドは前記負圧ラインの少なくとも一部を画成し、全ての流れ制御ラインについて前記負圧バルブを支持する、システム。
【請求項9】
請求項6に記載のシステムにおいて、前記流れ制御ラインの各々は前記負圧マニホールドの一つを含み、前記負圧マニホールドの各々は、他の負圧マニホールドとは別個に交換されるようになっている、システム。
【請求項10】
請求項9に記載のシステムにおいて、前記負圧マニホールドの各々は透明である、システム。
【請求項11】
請求項10に記載のシステムにおいて、前記負圧マニホールドは列をなして配置されている、システム。
【請求項12】
請求項6に記載のシステムにおいて、前記負圧マニホールドはブラケットで互いに固定されている、システム。
【請求項13】
請求項1に記載のシステムにおいて、前記流れ制御ラインは、前記連結ラインと前記圧力ラインとを連結する一次圧力バルブを更に含み、前記負圧マニホールドは前記一次圧力バルブを支持する、システム。
【請求項14】
請求項1に記載のシステムにおいて、前記流れ制御ラインの前記負圧ラインは、液体/固体トラップを含む、システム。
【請求項15】
請求項1に記載のシステムにおいて、前記流れ制御ラインは、前記連結ライン及び前記圧力ラインの一方に連結された通気ライン、及びこの通気ラインを通る流れを制御する通気バルブを更に含む、システム。
【請求項16】
請求項15に記載のシステムにおいて、前記圧力マニホールドは前記通気ラインを画成し、前記通気バルブを支持する、システム。
【請求項17】
請求項15に記載のシステムにおいて、前記通気ラインは流れ制流子を含む、システム。
【請求項18】
請求項1に記載のシステムにおいて、前記圧力バルブ及び前記負圧バルブを制御するコンピュータを更に含む、システム。
【請求項19】
請求項1に記載のシステムにおいて、前記流れ制御ラインは前記圧力ラインに圧力トランスジューサーを更に含む、システム。
【請求項20】
請求項1に記載の空気式制御システムを含むCMPキャリヤヘッドシステムにおいて、
内部に少なくとも一つの内部チャンバを画成する少なくとも一つの膨張可能な嚢を含むキャリヤヘッド、及び
前記キャリヤヘッドの前記内部チャンバに連結された流体ラインを画成する回転継手であって、前記空気式制御システムの前記流れ制御ラインが回転継手の前記流体ラインに連結された回転継手を更に含む、CMPキャリヤヘッドシステム。
【請求項21】
請求項22に記載のシステムにおいて、前記負圧ラインに連結された負圧源、及び前記圧力ラインに連結された圧力源を更に含む、システム。
【請求項22】
空気式制御システムの圧力ラインを空気式制御システムの負圧ラインが吸い込んだ汚染物から保護するための方法において、
前記圧力ラインの少なくとも一部を画成する圧力マニホールドを提供する工程、及び
前記負圧ラインの少なくとも一部を画成する負圧マニホールドを提供する工程を含み、前記負圧マニホールドは前記圧力マニホールドとは別個に交換されるようになっている、方法。
【請求項23】
請求項22に記載の方法において、液体/固体トラップを前記圧力マニホールドと前記負圧マニホールドとの間に設ける工程を更に含む、方法。
【請求項24】
請求項23に記載の方法において、前記液体/固体トラップは前記負圧マニホールドによって画成されている、方法。
【請求項25】
請求項22に記載の方法において、前記空気式制御システムは、複数の流れ制御ラインを含み、前記負圧マニホールドは全ての流れ制御ラインについての負圧ラインの少なくとも一部を画成する、方法。
【請求項26】
請求項22に記載の方法において、前記空気式制御システムは複数の流れ制御ラインを含み、複数の前記負圧マニホールドが設けられ、前記負圧マニホールドの各々は前記流れ制御ラインの一つに対して前記負圧ラインの少なくとも一部を画成する、方法。
【請求項1】
空気式制御システムにおいて、
少なくとも一つの流れ制御ラインであって、
空気作動式機械の流体ラインに連結できる連結ライン、
前記連結ラインに連結されており且つ負圧源に連結できる負圧ライン、
前記負圧ラインを通る流れを制御する負圧バルブ、
前記連結ラインに連結されており且つ加圧流体源に連結できる圧力ライン、及び
前記圧力ラインを通る流れを制御する圧力バルブ、を含む流れ制御ラインと、
前記圧力ラインの少なくとも一部を画成し、前記圧力バルブを支持する圧力マニホールドと、
前記負圧ラインの少なくとも一部を画成し、前記負圧バルブを支持し、前記圧力マニホールドとは別個に交換されるようになった負圧マニホールドとを含む、空気式制御システム。
【請求項2】
請求項1に記載のシステムにおいて、前記流れ制御ラインの前記連結ラインは液体/固体トラップを含む、システム。
【請求項3】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、J型トラップを含む、システム。
【請求項4】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、J/D型トラップを含む、システム。
【請求項5】
請求項2に記載のシステムにおいて、前記液体/固体トラップは、前記負圧マニホールドによって画成される、システム。
【請求項6】
請求項1に記載のシステムにおいて、複数の流れ制御ラインを含む、システム。
【請求項7】
請求項6に記載のシステムにおいて、前記圧力マニホールドは、前記圧力ラインの少なくとも一部を画成し、全ての流れ制御ラインについて前記圧力バルブを支持する、システム。
【請求項8】
請求項6に記載のシステムにおいて、前記負圧マニホールドは前記負圧ラインの少なくとも一部を画成し、全ての流れ制御ラインについて前記負圧バルブを支持する、システム。
【請求項9】
請求項6に記載のシステムにおいて、前記流れ制御ラインの各々は前記負圧マニホールドの一つを含み、前記負圧マニホールドの各々は、他の負圧マニホールドとは別個に交換されるようになっている、システム。
【請求項10】
請求項9に記載のシステムにおいて、前記負圧マニホールドの各々は透明である、システム。
【請求項11】
請求項10に記載のシステムにおいて、前記負圧マニホールドは列をなして配置されている、システム。
【請求項12】
請求項6に記載のシステムにおいて、前記負圧マニホールドはブラケットで互いに固定されている、システム。
【請求項13】
請求項1に記載のシステムにおいて、前記流れ制御ラインは、前記連結ラインと前記圧力ラインとを連結する一次圧力バルブを更に含み、前記負圧マニホールドは前記一次圧力バルブを支持する、システム。
【請求項14】
請求項1に記載のシステムにおいて、前記流れ制御ラインの前記負圧ラインは、液体/固体トラップを含む、システム。
【請求項15】
請求項1に記載のシステムにおいて、前記流れ制御ラインは、前記連結ライン及び前記圧力ラインの一方に連結された通気ライン、及びこの通気ラインを通る流れを制御する通気バルブを更に含む、システム。
【請求項16】
請求項15に記載のシステムにおいて、前記圧力マニホールドは前記通気ラインを画成し、前記通気バルブを支持する、システム。
【請求項17】
請求項15に記載のシステムにおいて、前記通気ラインは流れ制流子を含む、システム。
【請求項18】
請求項1に記載のシステムにおいて、前記圧力バルブ及び前記負圧バルブを制御するコンピュータを更に含む、システム。
【請求項19】
請求項1に記載のシステムにおいて、前記流れ制御ラインは前記圧力ラインに圧力トランスジューサーを更に含む、システム。
【請求項20】
請求項1に記載の空気式制御システムを含むCMPキャリヤヘッドシステムにおいて、
内部に少なくとも一つの内部チャンバを画成する少なくとも一つの膨張可能な嚢を含むキャリヤヘッド、及び
前記キャリヤヘッドの前記内部チャンバに連結された流体ラインを画成する回転継手であって、前記空気式制御システムの前記流れ制御ラインが回転継手の前記流体ラインに連結された回転継手を更に含む、CMPキャリヤヘッドシステム。
【請求項21】
請求項22に記載のシステムにおいて、前記負圧ラインに連結された負圧源、及び前記圧力ラインに連結された圧力源を更に含む、システム。
【請求項22】
空気式制御システムの圧力ラインを空気式制御システムの負圧ラインが吸い込んだ汚染物から保護するための方法において、
前記圧力ラインの少なくとも一部を画成する圧力マニホールドを提供する工程、及び
前記負圧ラインの少なくとも一部を画成する負圧マニホールドを提供する工程を含み、前記負圧マニホールドは前記圧力マニホールドとは別個に交換されるようになっている、方法。
【請求項23】
請求項22に記載の方法において、液体/固体トラップを前記圧力マニホールドと前記負圧マニホールドとの間に設ける工程を更に含む、方法。
【請求項24】
請求項23に記載の方法において、前記液体/固体トラップは前記負圧マニホールドによって画成されている、方法。
【請求項25】
請求項22に記載の方法において、前記空気式制御システムは、複数の流れ制御ラインを含み、前記負圧マニホールドは全ての流れ制御ラインについての負圧ラインの少なくとも一部を画成する、方法。
【請求項26】
請求項22に記載の方法において、前記空気式制御システムは複数の流れ制御ラインを含み、複数の前記負圧マニホールドが設けられ、前記負圧マニホールドの各々は前記流れ制御ラインの一つに対して前記負圧ラインの少なくとも一部を画成する、方法。
【図1】


【図2】
【図3】
【図4A】

【図4B】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公表番号】特表2007−502720(P2007−502720A)
【公表日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願番号】特願2006−533717(P2006−533717)
【出願日】平成16年6月14日(2004.6.14)
【国際出願番号】PCT/US2004/018578
【国際公開番号】WO2004/112097
【国際公開日】平成16年12月23日(2004.12.23)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願日】平成16年6月14日(2004.6.14)
【国際出願番号】PCT/US2004/018578
【国際公開番号】WO2004/112097
【国際公開日】平成16年12月23日(2004.12.23)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]