
吸引装置および分析装置
【課題】液状物に含まれた複数の物質のそれぞれを、各物質の混入を少なく抑えながら短時間で吸引することを可能とする。
【解決手段】ノズル15a,15bは、流路となる細孔をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放している。アーム14は、ノズル15a,15bの先端部を試料容器11に対する挿抜方向に移動可能に、かつノズル15a,15bのそれぞれの先端部を試料容器11内に同時に位置させることを可能に、ノズル15a,15bを支持する。アーム移動機構121aおよびノズル移動機構121bは、ノズル15a,15bの先端部をいずれも上記挿抜方向に移動させるようにノズル15a,15bをそれぞれ移動させる。特にノズル移動機構121bは、ノズル移動機構121bはの先端部の上記挿抜方向についての相対的な位置関係を変化させることが可能である。
【解決手段】ノズル15a,15bは、流路となる細孔をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放している。アーム14は、ノズル15a,15bの先端部を試料容器11に対する挿抜方向に移動可能に、かつノズル15a,15bのそれぞれの先端部を試料容器11内に同時に位置させることを可能に、ノズル15a,15bを支持する。アーム移動機構121aおよびノズル移動機構121bは、ノズル15a,15bの先端部をいずれも上記挿抜方向に移動させるようにノズル15a,15bをそれぞれ移動させる。特にノズル移動機構121bは、ノズル移動機構121bはの先端部の上記挿抜方向についての相対的な位置関係を変化させることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器に収容された血液等の液状物に含まれた血漿成分および血球成分などの物質を前記容器から吸引する吸引装置と、この吸引装置を利用して吸引した物質に基づいて液状物の性質を分析する分析装置に関する。
【背景技術】
【0002】
血液の分析装置を用いた血液の分析においては近年、遠心分離後の真空採血管から直接サンプリングするケースが増えている。また、抗凝固剤入りの真空採血管を用いて血球分画中の成分を測定する場合がある。
【0003】
さて、全血のうちの血漿成分と血球成分とをそれぞれ分析する場合、全血から血漿成分と血球成分とをそれぞれ吸引することが必要となる。
【0004】
このような場合に従来は、血漿成分と血球成分とに相分離した状態で容器に収容された全血から、1本のノズルを使用して2回に分けて血漿成分および血球成分をそれぞれ吸引していた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−288220
【発明の概要】
【発明が解決しようとする課題】
【0006】
1本のノズルを使用して血漿成分および血球成分をそれぞれ吸引するためには、吸引、吐出および洗浄からなるサイクルを1検体につき2回繰り返さなければならない。このため、血漿成分および血球成分をそれぞれ吸引し終えるまでに多くの時間を要する。また、ノズルの洗浄が不十分であった場合、ノズルに残留した一方の成分が他方の成分に混入してしまう恐れがあった。
【0007】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、液状物に含まれた複数の物質のそれぞれを、各物質の混入を少なく抑えながら短時間で吸引することを可能とすることにある。
【課題を解決するための手段】
【0008】
本発明の第1の態様による吸引装置は、容器に収容された液状物に含まれた物質を吸引する吸引装置であって、流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、前記複数のノズルの先端部を前記容器に対する挿抜方向に移動可能に、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に前記複数のノズルを支持する1つの支持部材と、前記複数のノズルの先端部をいずれも前記挿抜方向に移動させるように前記複数のノズルをそれぞれ移動させるもので、前記複数のノズルの先端部の前記挿抜方向についての相対的な位置関係を変化させることが可能な移動ユニットとを備える。
【0009】
本発明の第2の態様による吸引装置は、容器に収容された液状物に含まれた物質を吸引する吸引装置であって、流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に、かつ前記複数のノズルのそれぞれの先端部についての前記液状物への進入深度が互いに異なるように前記複数のノズルを固定的に支持する1つの支持部材と、前記複数のノズルのそれぞれの先端部が前記容器に対して挿抜する方向に移動するように前記支持部材を移動させる移動ユニットとを備えた。
【0010】
本発明の第3の態様による分析装置は、上記の第1または第2の態様の吸引装置と、前記吸引装置が備える複数のノズルのそれぞれによって前記容器から吸引された物質に基づいて前記液状物に関するそれぞれ異なる性質を分析する分析ユニットとを備える。
【発明の効果】
【0011】
本発明によれば、液状物に含まれた複数の物質のそれぞれを、各物質の混入を少なく抑えながら短時間で吸引することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る自動分析装置の構成を示したブロック図。
【図2】図1中のサンプル部、試薬部および反応部の構成を示す斜視図。
【図3】図1中のプローブユニットの第1の実施形態における構造を一部破断して示す図。
【図4】図3中のノズルおよび探針に接続される電気回路の構成を示す図。
【図5】図1中のシステム制御部の第1の実施形態における処理手順を示したフローチャート。
【図6】図2中のアームの追加下降が終了した状態の一例を示す図。
【図7】ノズル移動機構によるノズルの下降を停止させた状態の一例を示す図。
【図8】図1中のプローブユニットの第2の実施形態における構造を一部破断して示す図。
【図9】図1中のシステム制御部の第2の実施形態における処理手順を示したフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明のいくつかの実施形態について説明する。
【0014】
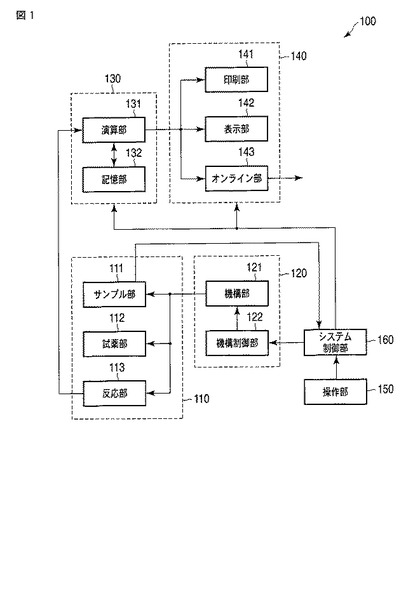
図1は本実施形態に係る自動分析装置100の構成を示したブロック図である。
【0015】
自動分析装置100は図1に示すように、測定部110、分析制御部120、分析データ処理部130、出力部140、操作部150およびシステム制御部160を含む。
【0016】
測定部110はさらに、サンプル部111、試薬部112および反応部113を含む。サンプル部111は、測定項目毎のキャリブレータや、被検体から採取された被検試料(サンプル)を管理する。試薬部112は、測定項目に応じたサンプルの成分と化学反応させるための試薬を管理する。反応部113は、サンプルと試薬との反応液に関して、測定項目に応じた測定を行う。反応部113は、キャリブレータおよびサンプルについての測定結果をそれぞれ表すキャリブレータ信号および分析信号を分析データ処理部130に出力する。
【0017】
分析制御部120はさらに、機構部121および機構制御部122を含む。機構部121は、測定部110に含まれた後述する各種の可動要素を駆動する。機構制御部122は、機構部121の動作を制御する。
【0018】
分析データ処理部130はさらに、演算部131および記憶部132を含む。演算部131は、測定部110から出力されたキャリブレータ信号に基づいて、測定項目毎のキャリブレーションテーブルを作成する。演算部131は、測定部110から出力された分析信号とキャリブレーションテーブルとに基づいて、測定項目毎の分析データを算出する。記憶部132はハードディスクなどを備え、キャリブレーションテーブルや分析データなどを記憶する。演算部131は、キャリブレーションテーブルや分析データを、必要に応じて出力部140へ出力する。
【0019】
出力部140はさらに、印刷部141、表示部142およびオンライン部143を含む。印刷部141はプリンタなどを備え、演算部131から出力されたキャリブレーションテーブルや分析データを予め設定されたフォーマットでプリンタ用紙などに印刷する。表示部142はCRT(cathode-ray tube)やLCD(liquid crystal display)などを備え、演算部131から出力されたキャリブレーションテーブルや分析データを表示する。表示部142は、被検体のIDおよび氏名などを入力するための被検体情報入力画面、測定項目毎の分析条件を設定するための分析条件設定画面、サンプル毎の測定項目を選択設定するための測定項目設定画面などを、システム制御部160の制御の下に表示する。オンライン部143は、演算部131から出力されたキャリブレーションテーブルや分析データを、ネットワークを介して他の装置へ送信する。
【0020】
操作部150は、キーボード、マウス、ボタン、あるいはタッチキーパネルなどの入力デバイスを備える。操作部150は、測定項目毎の分析条件の設定、被検体の被検体IDや被検体名などの被検体情報の入力、サンプル毎の測定項目の選択入力、各測定項目のキャリブレーションやサンプル測定などのために操作者により操作される。操作部150は、操作者による操作の内容を表すコマンド信号をシステム制御部160へ出力する。
【0021】
システム制御部160は、CPUと記憶回路とを備え、自動分析装置100の各部を統括して制御する。具体的にはシステム制御部160は、操作部150から供給されるコマンド信号に基づいて、測定項目の分析条件、被検体情報、サンプル毎の測定項目などを判定し、これらを情報を記憶しておく。そしてシステム制御部160は、これらの情報に基づいて、一定サイクルの中の所定のシーケンスで測定を行うように測定部110の動作を制御する。システム制御部160は、所要のキャリブレーションテーブルの作成や所要の分析データの算出を行うように分析データ処理部130を制御する。さらにシステム制御部160は、キャリブレーションテーブルや分析データを所要の形態で出力するように出力部140を制御する。
【0022】
図2はサンプル部111、試薬部112および反応部113の構成を示す斜視図である。
【0023】
サンプル部111は、試料容器11、サンプラ12a,12b、ラック13、アーム14、プローブユニット15およびポンプユニット16を含む。
【0024】
試料容器11は、キャリブレータ、精度管理用試料、あるいはサンプルを収容する。
【0025】
サンプラ12aは、多数の試料容器11を円周状に2列配列してセットできる。サンプラ12aは、回転することによって、セットされている試料容器11を上記の円周に沿って移動させる。サンプラ12aにおける試料容器11をセットする位置のそれぞれは、キャリブレータ用のセット位置または精度管理用試料のセット位置に予め割り当てられている。キャリブレータを収容した試料容器11は前者のセット位置にセットされ、精度管理用試料を収容した試料容器11は後者のセット位置にセットされる。
【0026】
サンプラ12bは、多数のラック13をセットできる。ラック13は、複数の試料容器11を直線状に配列してセットできる。ラック13は、試料容器11の配列方向に直交する方向に沿って配列される。サンプラ12bは、ラック13をその配列方向に移動させる。またサンプラ12bは、サンプル吸引位置においては、ラック13をその配列方向に直交する方向にも移動させる。ラック13における試料容器11をセットする位置のそれぞれは、サンプルのセット位置に予め割り当てられており、サンプルを収容した試料容器11がこのセット位置にセットされる。
【0027】
アーム14は、回動が可能なように一端において支持されている。アーム14の他端には、プローブユニット15が取り付けられている。アーム14は、機構部121に属するアーム移動機構121aによって回動される。またアーム14は、アーム移動機構121aによって鉛直方向に移動される。かくしてアーム14は、プローブユニット15を円弧状の軌道に沿って移動させたり上下動させる。ポンプユニット16は、水などの圧力伝達媒体を吸引、吐出することによってプローブユニット15がサンプルを吸引、吐出するための圧力を生じさせる。かくして、これらアーム14、プローブユニット15およびポンプユニット16により、試料容器11に収容されたサンプルを吸引する吸引装置が構成されている。
【0028】
試薬部112は、試薬ボトル21、試薬ラック22a,22b、アーム23a,23b,24a,24b、脚部25a,25b,26a,26bおよび試薬プローブ27a,27b,28a,28bを含む。
【0029】
試薬ボトル21は、サンプルに対して選択的に反応する試薬を収容する。
【0030】
試薬ラック22a,22bは、それぞれ複数の試薬ボトル21を収納する。試薬ラック22a,22bはそれぞれ、上面を開口したほぼ円柱状の容器である。試薬ラック22a,22bはそれぞれ、複数の試薬ボトル21を円周状に2列配列した状態で収容できる。試薬ラック22a,22bは、図1では示されていない後述する回転機構によってそれぞれ回転される。
【0031】
アーム23a,23b,24a,24bは、その一端が脚部25a,25b,26a,26bによってそれぞれ支持されている。アーム23a,23b,24a,24bの他端には、試薬プローブ27a,27b,28a,28bがそれぞれ取り付けられている。
【0032】
脚部25a,25b,26a,26bは、図1では図示されていない周知の構造の回転機構によってそれぞれ回転されることによって、アーム23a,23b,24a,24bをそれぞれ回動させる。脚部25a,25b,26a,26bは、図1においてはその一部のみが示されていて、実際には図示されているよりも長い。そして脚部25a,25b,26a,26bは、図1では図示されていない周知の構造の直線移動機構によってそれぞれに鉛直方向に直線移動される。
【0033】
試薬プローブ27a,27b,28a,28bは、アーム23a,23b,24a,24bおよび脚部25a,25b,26a,26bによって、それぞれ円弧状の軌道に沿って移動されたり、上下動される。試薬プローブ27a,27b,28a,28bは、内部に細い空洞を有していて、この空洞にアーム23a,23b,24a,24bおよび脚部25a,25b,26a,26bを介して図示しないポンプがそれぞれに接続されている。試薬プローブ27a,27b,28a,28bは、接続されたポンプにより生じられた圧力を利用して、試薬を吸引、吐出する。
【0034】
反応部113は、反応容器31、ディスク32、撹拌ユニット33a,33b、測光ユニット34および洗浄ユニット35を含む。
【0035】
反応容器31は、多数が円周状に配列されている。反応容器31は、サンプルと試薬との反応液を収容する。
【0036】
ディスク32は、反応容器31を回転可能に保持する。ディスク32は、反時計回りに、一定角度を4分析サイクルの間に回転する。1分析サイクルは、例えば4.5秒である。ディスク32は、時計回りに回転させるようにしてもよい。
【0037】
撹拌ユニット33aは、2つの撹拌子を備える。撹拌ユニット33aは、反応容器31の上方にそれぞれ相当する2つの撹拌位置と、これとは異なる2つの洗浄位置との間で2つの撹拌子を移動させることができる。また撹拌ユニット33aは、2つの撹拌子を鉛直方向に移動させることができる。撹拌ユニット33aは、2つの洗浄位置において2つの撹拌子をそれぞれ洗浄する機能を備える。この撹拌ユニット33aは、反応容器31に分注されたサンプルと第1の試薬とを撹拌するために使用される。
【0038】
撹拌ユニット33bは、2つの撹拌子を備える。撹拌ユニット33bは、反応容器31の上方にそれぞれ相当する2つの各半日と、これとは異なる2つの洗浄位置との間で2つの撹拌子を移動させることができる。また撹拌ユニット33bは、2つの撹拌子を鉛直方向に移動させることができる。撹拌ユニット33bは、2つの洗浄位置において2つの撹拌子をそれぞれ洗浄する機能を備える。この撹拌ユニット33bは、反応容器31に分注されたサンプルと第1の試薬と第2の試薬とを撹拌するために使用される。
【0039】
測光ユニット34は、反応容器31が測光位置を通過する時に光を照射して、透過した光から設定波長の吸光度を測定する。そして測光ユニット34は、測定した吸光度を表す信号として分析信号を生成する。
【0040】
洗浄ユニット35は、洗浄ノズルおよび乾燥ノズルを備える。洗浄ユニット35は、洗浄ノズルにより、反応容器31内の反応液を吸引するとともに洗浄する。また洗浄ユニット35は、洗浄後の反応容器31内を乾燥ノズルにより乾燥する。洗浄ユニット35で洗浄および乾燥された反応容器31は、測定に再び使用される。
【0041】
(第1の実施形態)
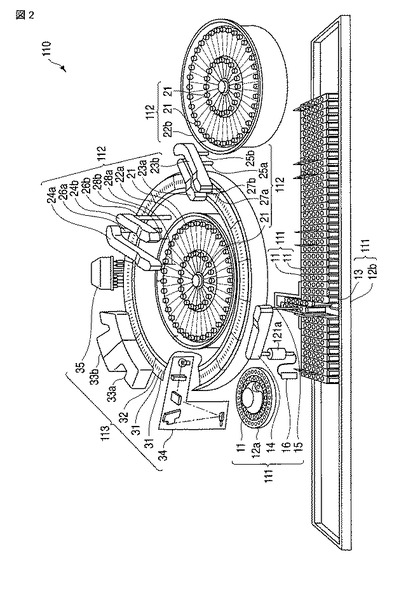
図3は第1の実施形態におけるプローブユニット15の構造を一部破断して示す図である。
【0042】
プローブユニット15は、ノズル15a,15b、探針15c,15dおよび保持部材15e,15f,15gを含む。
【0043】
ノズル15a,15bは、図3においては断面が示されている。ノズル15a,15bは、外形は細長い針状をなしており、内部には両端間に渡って貫通した細孔が形成されている。ノズル15a,15bの細孔には、チューブ17,18を介してポンプユニット16が接続されている。ノズル15a,15bは、ポンプユニット16によって細孔内が負圧とされることによって、先端の開口から細孔内にサンプルを吸引できる。そしてノズル15a,15bは、ポンプユニット16によって細孔内の負圧が解消されることによって、細孔内に保持していたサンプルを吐出する。ノズル15a,15bの材料としては、導電性があり、細孔内が負圧とされても変形せず、かつサンプルの付着による変性が起きにくい材料、すなわち例えばステンレスや白金などが使用される。なお、ポンプユニット16は、ノズル15a,15bのそれぞれの細孔の圧力を個別に調整する機能を備える。
【0044】
探針15c,15dは、導電性があり、かつサンプルの付着による変性が起きにくい材料、すなわち例えばステンレスや白金などを細長い棒状に形成したものである。探針15c,15dは、その先端の位置が、探針15cはノズル15aの先端に対して、また探針15dはノズル15bの先端に対してそれぞれ一定の間隔を保つように、ノズル15a,15bにそれぞれ取り付けられている。なお、ノズル15a,15bに対する探針15c,15dの取付部分においては、ノズル15a,15bと探針15c,15dとは互いに絶縁されている。
【0045】
保持部材15e,15fは、ノズル15aをアーム14の筐体14aまたは支持部材(図示せず)に固定する。保持部材15gは、ノズル15bに固定的に取り付けられている。保持部材15gは、アーム14の筐体14aまたは支持部材(図示せず)に設けられたガイド部14bに取り付けられている。ガイド部14bは、保持部材15gを鉛直方向(図3中においては縦方向)にのみ移動可能なように支持する。かくしてノズル15aはアーム14に対する相対位置を変化できないのに対し、ノズル15bはアーム14に対する鉛直方向についての相対位置を変化可能である。ノズル15bは、ノズル移動機構121bによっても保持されている。ノズル移動機構121bは、ノズル15bのアーム14に対する水平方向についての相対位置を固定するととともに、ノズル15bのアーム14に対する鉛直方向についての相対位置を変化させるようにノズル15bを鉛直方向に往復移動させる。ノズル移動機構121bは、棒状の物体を往復運動させるための周期の機構をそのまま利用できる。なお、ノズル移動機構121bは、機構部121に含まれる。
【0046】
ノズル15a,15bおよび探針15c,15dは、試料容器11のうちの1つの内部に同時に挿入することが可能なように水平方向の相対位置が定められている。また、ノズル15bが可動範囲の最も上側に位置している状態であっても、ノズル15bの先端がノズル15aの先端よりも下方に位置するように、ノズル15a,15bの鉛直方向についての相対位置が定められている。
【0047】
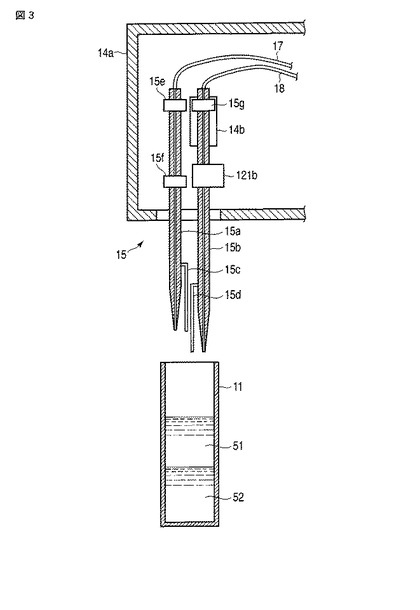
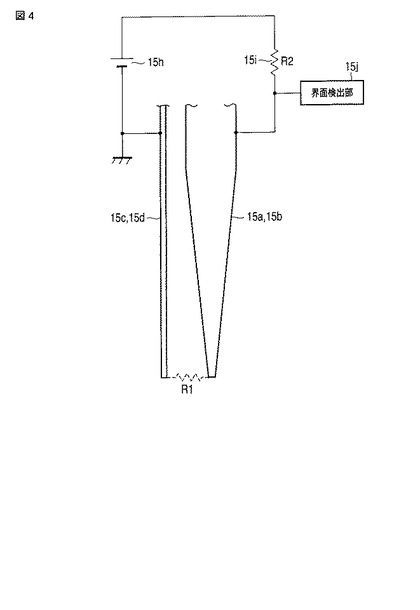
図4はノズル15a,15bおよび探針15c,15dに接続される電気回路の構成を示す図である。なお、この図4に示される電気回路は、ノズル15aおよび探針15cと、ノズル15bおよび探針15dとのそれぞれに一組ずつが設けられる。
【0048】
図4に示すようにプローブユニット15は、図3に示される各要素の他に、電源15h、抵抗器15iおよび界面検出部15jからなる電気回路を含んでいる。
【0049】
電源15hおよび抵抗器15iは、ノズル15a,15bと探針15c,15dとの間に直列に接続される。界面検出部15jは、ノズル15a,15bと抵抗器15iとの接続点に接続される。かくしてこの電気回路では、ノズル15a,15bと探針15c,15dとの間に存在する物質の電気抵抗値R1と抵抗器15iの抵抗値とによって電源15hの出力電圧を分圧して得られる電圧値が界面検出部15jに入力される。界面検出部15jは、この入力電圧値の変化に基づいて、外気とサンプルとの界面(以下、液面と称する)またはサンプル内の血漿成分と血球成分との界面(以下、境界面と称する)を検出する。界面検出部15jでの検出結果は、システム制御部160に与えられる。
【0050】
次に以上のようにプローブユニット15が構成された第1の実施形態における自動分析装置100の動作について説明する。ただし、第1の実施形態における自動分析装置100における特徴的な動作は、試料容器11の内部で血漿成分および血球成分とに界面分離した状態にある血液を試料容器11から吸引する動作である。その他の動作は従来よりある同種の自動分析装置と同様で良いので、その説明は省略する。
【0051】
界面分離した血液においては、図3に示すように上方に血漿成分51が、かつ下方に血球成分52がそれぞれ位置する。このような血漿成分51および血球成分52をそれぞれ反応容器31に分注することが必要である場合に、システム制御部160はアーム14を回動させてノズル15a,15bを該当する試料容器11の上方に位置させる。この状態からシステム制御部160は、サンプルの吸引のための処理を以下のように実行する。
【0052】
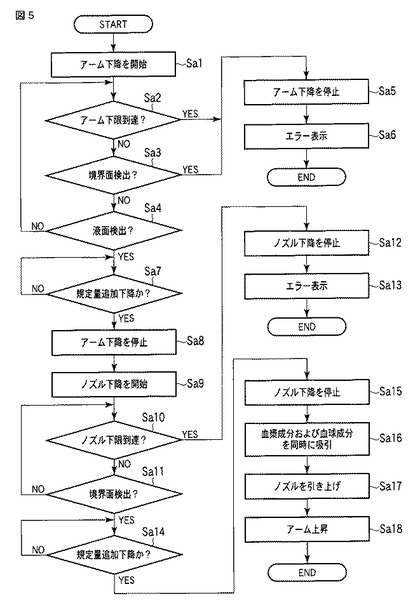
図5は試料容器11からのサンプルの吸引に係るシステム制御部160の処理手順を示したフローチャートである。
【0053】
ステップSa1においてシステム制御部160は、機構制御部122に指示してアーム14の下降を開始させる。アーム14の下降に伴って、ノズル15a,15bも下降してゆく。なお、この時点においてノズル15bは、最上端の位置(以下、基準位置と称する)にある。
【0054】
このままアーム14を下降させてゆくと、まずノズル15bが、さらにしばらくしてノズル15aが試料容器11に挿入される。さらにアーム14を降下させてゆくと、まずノズル15bが、さらにしばらくしてノズル15aが血液に到達する。
【0055】
さて、ノズル15a,15bの先端が液面に到達していないとき、ノズル15a,15bと探針15c,15dとの間には外気が存在するだけであるから、ノズル15a,15bと探針15c,15dとは互いに絶縁されている。このため抵抗器15iに電流は流れず、界面検出部15jに電圧は入力されない。ノズル15a,15bの先端が液面に到達すると、ノズル15a,15bと探針15c,15dとが血漿成分51を介して導通する。このため、抵抗器15iに電流が流れるようになり、界面検出部15jに電圧が入力されるようになる。さらにノズル15a,15bの先端が境界面に到達すると、ノズル15a,15bと探針15c,15dとを導通させる物質が血漿成分51から血球成分52に代わるために抵抗値R1が変化し、界面検出部15jに入力される電圧値が変化する。そこで、ノズル15aに接続された界面検出部15jでは、液面での上記の電圧変化が生じたことに応じて、ノズル15aが液面に到達したことを検出する。またノズル15bに接続された界面検出部15jでは、界面での上記の電圧変化が生じたことに応じて、ノズル15bが境界面に到達したことを検出する。
【0056】
アーム14が下降している状態でシステム制御部160はステップSa2乃至ステップSa4の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、アーム14が予め定められた下限に到達するか、ノズル15aの液面到達が検出されるか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0057】
さて、試料容器11に規定量のサンプルが収容されていない場合、ノズル15aの液面到達が検出されるよりも前にアーム14が下限に到達する。また、血漿成分51の量が少ない場合、ノズル15aの液面到達が検出されるよりも前にノズル15bの境界面到達が検出される。そしてこれらのケースでは、血漿成分51および血球成分52の双方を正しく吸引できないおそれがある。そこでこのような場合には、システム制御部160はステップSa2またはステップSa3からステップSa5へ移行する。ステップSa5においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSa6において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0058】
一方、システム制御部160がステップSa2乃至ステップSa4の待ち受け状態にあるときに、ノズル15aの液面到達が検出されたならば、システム制御部160はステップSa4からステップSa7へ移行する。ステップSa7においてシステム制御部160は、ノズル15aの液面到達が検出された時点からアーム14が規定量だけ追加して下降するのを待つ。なおこのアーム14の追加下降は、ノズル15aの先端を、血漿成分51を吸引するのに十分な程度に血漿成分51内へ挿入するために行うものである。
【0059】
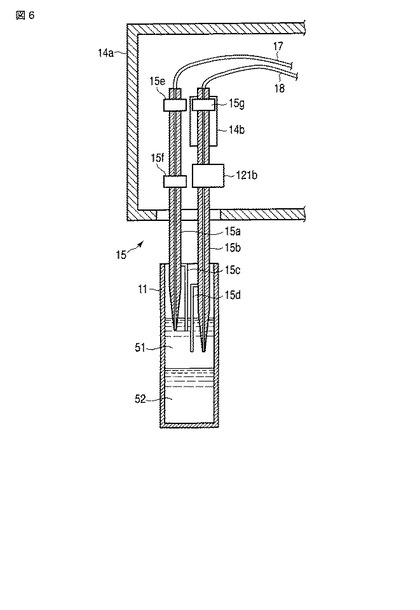
図6はアーム14の追加下降が終了した状態の一例を示す図である。
【0060】
この追加下降が終了したならば、システム制御部160はステップSa7からステップSa8へ移行する。ステップSa8においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSa9において、機構制御部122に指示してノズル移動機構121bを動作させ、ノズル15bの下降を開始させる。そしてノズル15bが下降している状態でシステム制御部160は、ステップSa10およびステップSa11の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、ノズル15bが予め定められた下限に到達するか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0061】
さて、血球成分52の量が多い場合、ノズル15bの境界面到達が検出されるよりも前にノズル15bが下限に到達することがある。そしてこの場合には、ノズル15bの先端を血球成分52に挿入することができず、血球成分52を正しく吸引できない。そこでこのような場合には、システム制御部160はステップSa10からステップSa12へ移行する。ステップSa12においてシステム制御部160は、機構制御部122に指示してノズル15bの下降を停止させる。こののちにシステム制御部160はステップSa13において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0062】
一方、システム制御部160がステップSa10およびステップSa11の待ち受け状態にあるときに、ノズル15bの境界面到達が検出されたならば、システム制御部160はステップSa11からステップSa14へ移行する。そしてステップSa14においてシステム制御部160は、ノズル15bの境界面到達が検出された時点からノズル15bが規定量だけ追加して下降するのを待つ。なおこのノズル15bの追加下降は、ノズル15bの先端を、血球成分52を吸引するのに十分な程度に血球成分52内へ挿入するために行うものである。
【0063】
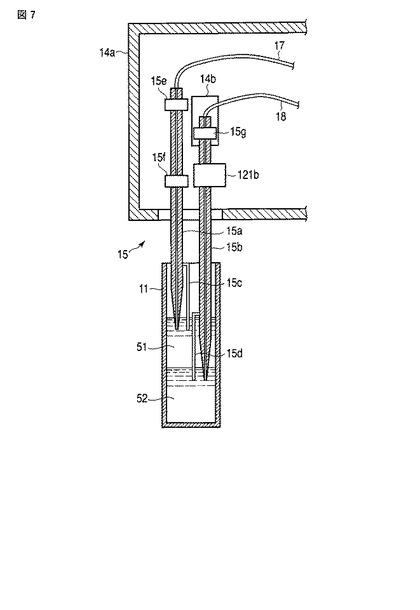
この追加下降が終了したならば、システム制御部160はステップSa14からステップSa15へ移行する。ステップSa15においてシステム制御部160は、機構制御部122に指示してノズル15bの下降を停止させる。これにより図7に示すように、ノズル15aはその先端が血漿成分51に挿入された状態で、またノズル15bはその先端が血球成分52に挿入された状態でそれぞれ停止している。システム制御部160はステップSa16において、機構制御部122に指示してノズル15a,15bのそれぞれの細孔に同時に負圧を生じさせる。これにより、ノズル15a,15bにより血漿成分51および血球成分52が同時に吸引される。
【0064】
こののちにシステム制御部160はステップSa17において、機構制御部122に指示してノズル移動機構121bを動作させ、ノズル15bを基準位置まで引き上げる。さらにシステム制御部160はステップSa18において、機構制御部122に指示してアーム14を最上端の位置まで上昇させる。
【0065】
以上のように第1の実施形態によれば、血漿成分51および血球成分52を同時に吸引することが可能である。このため、吸引工程に要する時間を、血漿成分51の吸引と血球成分52の吸引とを時系列的に行う場合に比べて半分程度まで短縮することができる。そしてこの吸引工程の時間短縮により、検査時間の時間短縮を図ることが可能となる。
【0066】
また第1の実施形態によれば、ノズル15bのみを下降させ、ノズル15aとノズル15bとの鉛直方法についての相対的な位置関係を変更することができるので、ノズル15aおよびノズル15bのそれぞれの先端を血漿成分51および血球成分52をそれぞれ吸引するのに適当な量だけ血漿成分51および血球成分52に挿入した状態を形成することが可能である。そしてこの結果、血漿成分51および血球成分52を的確に吸引することが可能である。
【0067】
(第2の実施形態)
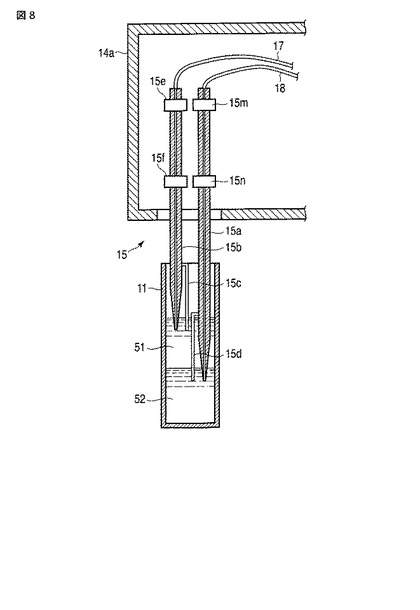
図8は第2の実施形態におけるプローブユニット15の構造を一部破断して示す図である。なお、図3と同一部分には同一符号を付し、その詳細な説明は省略する。
【0068】
プローブユニット15は、ノズル15a,15b、探針15c,15dおよび保持部材15e,15f,15m,15nを含む。
【0069】
すなわちプローブユニット15は、第2の実施形態においては第1の実施形態における保持部材15gを備えておらず、代わりに保持部材15m,15nを備える。また、筐体14aにガイド部14bは形成されておらず、かつ機構部121にノズル移動機構121bも含まれない。
【0070】
保持部材15m,15nは、ノズル15bを筐体14aまたは支持部材(図示せず)に固定する。
【0071】
ノズル15a,15bおよび探針15c,15dは、試料容器11のうちの1つの内部に同時に挿入することが可能なように水平方向の相対位置が定められている。また、ノズル15bの先端がノズル15aの先端よりも下方に位置するように、ノズル15a,15bの鉛直方向についての相対位置が定められている。さらにノズル15bの先端がノズル15aの先端との鉛直方向についての離間間隔は、液面と境界面との間の標準的な間隔と同程度に定められる。
【0072】
次に以上のようにプローブユニット15が構成された第2の実施形態における自動分析装置100の動作について説明する。ただし、第2の実施形態における自動分析装置100における特徴的な動作は、試料容器11の内部で血漿成分および血球成分とに界面分離した状態にある血液を試料容器11から吸引する動作である。その他の動作は従来よりある同種の自動分析装置と同様で良いので、その説明は省略する。
【0073】
システム制御部160はアーム14を回動させてノズル15a,15bを、吸引対象となる血液が収容された試料容器11の上方に位置させる。この状態からシステム制御部160は、サンプルの吸引のための処理を以下のように実行する。
【0074】
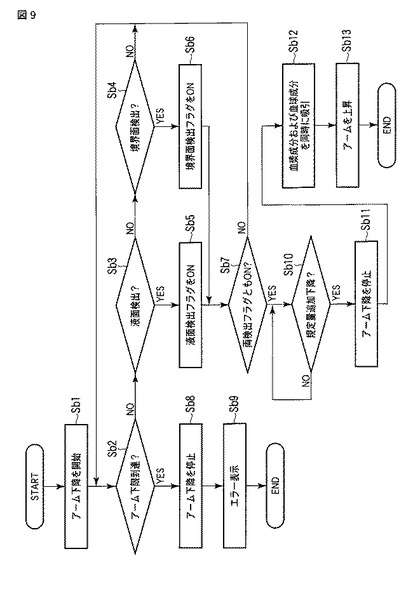
図9は試料容器11からのサンプルの吸引に係るシステム制御部160の処理手順を示したフローチャートである。
【0075】
ステップSb1においてシステム制御部160は、機構制御部122に指示してアーム14の下降を開始させる。アーム14の下降に伴って、ノズル15a,15bも下降してゆく。
【0076】
アーム14が下降している状態でシステム制御部160はステップSb2乃至ステップSb4の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、アーム14が予め定められた下限に到達するか、ノズル15aの液面到達が検出されるか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0077】
さて、システム制御部160がステップSb2乃至ステップSb4の待ち受け状態にあるときに、ノズル15aの液面到達が検出されたならば、システム制御部160はステップSb3からステップSb5へ移行する。そしてステップSb5においてシステム制御部160は、液面検出フラグをONする。こののちにシステム制御部160は、ステップSb7へ進む。
【0078】
一方、システム制御部160がステップSb2乃至ステップSb4の待ち受け状態にあるときに、ノズル15bの境界面到達が検出されたならば、システム制御部160はステップSb4からステップSb6へ移行する。そしてステップSb6においてシステム制御部160は、境界面検出フラグをONする。こののちにシステム制御部160は、ステップSb7へ進む。
【0079】
なお、液面検出フラグおよび境界面検出フラグは、例えばシステム制御部160が有するメモリを利用して実現される。そして液面検出フラグおよび境界面検出フラグは、図9の処理を開始する際にともにOFFに初期化される。
【0080】
ステップSb7においてシステム制御部160は、液面検出フラグおよび境界面検出フラグの両方ともがONになっているか否かを確認する。そして、液面検出フラグおよび境界面検出フラグのいずれかでもOFFであるならば、システム制御部160はステップSb2乃至ステップSb4の待ち受け状態に戻る。
【0081】
さて、試料容器11に収容されている血漿成分51および血球成分52のいずれか一方でも大幅に少ない場合、ノズル15aの液面到達およびノズル15bの境界面到達の双方が検出されるよりも前にアーム14が下限に到達することになる。そこでこの場合にシステム制御部160は、ステップSb2からステップSb8へ進む。ステップSb8においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSb9において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0082】
一方、アーム14が下限に到達する前にノズル15aの液面到達およびノズル15bの境界面到達の双方が検出されたならば、システム制御部160はステップSb7において液面検出フラグおよび境界面検出フラグの両方ともがONであることを確認できるので、この場合にシステム制御部160はステップSb7からステップSb10へ進む。ステップSb10においてシステム制御部160は、その時点からアーム14が規定量だけ追加して下降するのを待つ。なおこのアーム14の追加下降は、ノズル15aおよびノズル15bの先端を、血漿成分51および血球成分52を吸引するのに十分な程度に血漿成分51および血球成分52内へ挿入するために行うものである。図8はアーム14の追加下降が終了した状態の一例を示している。
【0083】
この追加下降が終了したならば、システム制御部160はステップSb10からステップSb11へ移行する。ステップSb11においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSb12において、機構制御部122に指示してノズル15a,15bのそれぞれの細孔に同時に負圧を生じさせる。これにより、ノズル15a,15bにより血漿成分51および血球成分52が同時に吸引される。
【0084】
こののちにシステム制御部160はステップSb13において、機構制御部122に指示してアーム14を最上端の位置まで上昇させる。
【0085】
以上のように第2の実施形態によれば、血漿成分51および血球成分52を同時に吸引することが可能である。このため、吸引工程に要する時間を、血漿成分51の吸引と血球成分52の吸引とを時系列的に行う場合に比べて半分程度まで短縮することができる。そしてこの吸引工程の時間短縮により、検査時間の時間短縮を図ることが可能となる。
【0086】
また第2の実施形態によれば、ノズル15a,15bを血液中に挿入するためにアーム14を下降させるだけであるので、前記第1の実施形態に比べて構造および制御が簡略化できる。ただし、血漿成分51の量のばらつきに対する適応性は、第2の実施形態よりも第1の実施形態のほうが高い。
【0087】
この実施形態は、次のような種々の変形実施が可能である。
【0088】
第1の実施形態では、ノズル15aをアーム14に対して移動可能とし、ノズル15bはアーム14に固定しても良い。また、ノズル15a,15bの双方を個別に移動可能としても良い。なお、ノズル15aを移動可能とする場合には、例えばノズル15bと同様な支持構造とノズル移動機構とを備えれば良い。
【0089】
前記各実施形態では、アーム14の移動によるノズル15a,15bの移動方向およびノズル移動機構121bによるノズル15bの移動方向をいずれも鉛直方向としているが、ノズル15a,15bの移動方向はノズル15a,15bを試料容器11の内部にその開口から挿入できる方向であればいかなる方向であっても良い。
【0090】
前記各実施形態では、プローブユニット15が備えるノズルは3つ以上であっても良い。
【0091】
吸引対象とする物質は血漿成分51および血球成分52以外の任意の物質であって良いし、それは血液の成分である必要もない。
【0092】
前記各実施形態のプローブユニット15は、血液検査装置などのような自動分析装置以外の装置にも適用可能である。
【0093】
液面および境界面の検出には、ノズルを探針の1つとして使用せずに電気抵抗値の変化を検出するセンサを使用しても良い。あるいは静電容量の変化、圧力の変化、あるいは吸光度の変化を利用して液面および境界面を検出しても良い。
【0094】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0095】
11…試料容器、12a,12b…サンプラ、13…ラック、14…アーム、14a…筐体、14b…ガイド部、15…プローブユニット、15a,15b…ノズル、15c,15d…探針、15e,15f,15g,15m,15n…保持部材、15h…電源、15i…抵抗器、15j…界面検出部、16…ポンプユニット、17,18…チューブ、100…自動分析装置、110…測定部、120…分析制御部、121…機構部、121a…アーム移動機構、121b…ノズル移動機構、122…機構制御部、130…分析データ処理部、140…出力部、150…操作部、160…システム制御部。
【技術分野】
【0001】
本発明は、容器に収容された血液等の液状物に含まれた血漿成分および血球成分などの物質を前記容器から吸引する吸引装置と、この吸引装置を利用して吸引した物質に基づいて液状物の性質を分析する分析装置に関する。
【背景技術】
【0002】
血液の分析装置を用いた血液の分析においては近年、遠心分離後の真空採血管から直接サンプリングするケースが増えている。また、抗凝固剤入りの真空採血管を用いて血球分画中の成分を測定する場合がある。
【0003】
さて、全血のうちの血漿成分と血球成分とをそれぞれ分析する場合、全血から血漿成分と血球成分とをそれぞれ吸引することが必要となる。
【0004】
このような場合に従来は、血漿成分と血球成分とに相分離した状態で容器に収容された全血から、1本のノズルを使用して2回に分けて血漿成分および血球成分をそれぞれ吸引していた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−288220
【発明の概要】
【発明が解決しようとする課題】
【0006】
1本のノズルを使用して血漿成分および血球成分をそれぞれ吸引するためには、吸引、吐出および洗浄からなるサイクルを1検体につき2回繰り返さなければならない。このため、血漿成分および血球成分をそれぞれ吸引し終えるまでに多くの時間を要する。また、ノズルの洗浄が不十分であった場合、ノズルに残留した一方の成分が他方の成分に混入してしまう恐れがあった。
【0007】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、液状物に含まれた複数の物質のそれぞれを、各物質の混入を少なく抑えながら短時間で吸引することを可能とすることにある。
【課題を解決するための手段】
【0008】
本発明の第1の態様による吸引装置は、容器に収容された液状物に含まれた物質を吸引する吸引装置であって、流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、前記複数のノズルの先端部を前記容器に対する挿抜方向に移動可能に、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に前記複数のノズルを支持する1つの支持部材と、前記複数のノズルの先端部をいずれも前記挿抜方向に移動させるように前記複数のノズルをそれぞれ移動させるもので、前記複数のノズルの先端部の前記挿抜方向についての相対的な位置関係を変化させることが可能な移動ユニットとを備える。
【0009】
本発明の第2の態様による吸引装置は、容器に収容された液状物に含まれた物質を吸引する吸引装置であって、流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に、かつ前記複数のノズルのそれぞれの先端部についての前記液状物への進入深度が互いに異なるように前記複数のノズルを固定的に支持する1つの支持部材と、前記複数のノズルのそれぞれの先端部が前記容器に対して挿抜する方向に移動するように前記支持部材を移動させる移動ユニットとを備えた。
【0010】
本発明の第3の態様による分析装置は、上記の第1または第2の態様の吸引装置と、前記吸引装置が備える複数のノズルのそれぞれによって前記容器から吸引された物質に基づいて前記液状物に関するそれぞれ異なる性質を分析する分析ユニットとを備える。
【発明の効果】
【0011】
本発明によれば、液状物に含まれた複数の物質のそれぞれを、各物質の混入を少なく抑えながら短時間で吸引することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る自動分析装置の構成を示したブロック図。
【図2】図1中のサンプル部、試薬部および反応部の構成を示す斜視図。
【図3】図1中のプローブユニットの第1の実施形態における構造を一部破断して示す図。
【図4】図3中のノズルおよび探針に接続される電気回路の構成を示す図。
【図5】図1中のシステム制御部の第1の実施形態における処理手順を示したフローチャート。
【図6】図2中のアームの追加下降が終了した状態の一例を示す図。
【図7】ノズル移動機構によるノズルの下降を停止させた状態の一例を示す図。
【図8】図1中のプローブユニットの第2の実施形態における構造を一部破断して示す図。
【図9】図1中のシステム制御部の第2の実施形態における処理手順を示したフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明のいくつかの実施形態について説明する。
【0014】
図1は本実施形態に係る自動分析装置100の構成を示したブロック図である。
【0015】
自動分析装置100は図1に示すように、測定部110、分析制御部120、分析データ処理部130、出力部140、操作部150およびシステム制御部160を含む。
【0016】
測定部110はさらに、サンプル部111、試薬部112および反応部113を含む。サンプル部111は、測定項目毎のキャリブレータや、被検体から採取された被検試料(サンプル)を管理する。試薬部112は、測定項目に応じたサンプルの成分と化学反応させるための試薬を管理する。反応部113は、サンプルと試薬との反応液に関して、測定項目に応じた測定を行う。反応部113は、キャリブレータおよびサンプルについての測定結果をそれぞれ表すキャリブレータ信号および分析信号を分析データ処理部130に出力する。
【0017】
分析制御部120はさらに、機構部121および機構制御部122を含む。機構部121は、測定部110に含まれた後述する各種の可動要素を駆動する。機構制御部122は、機構部121の動作を制御する。
【0018】
分析データ処理部130はさらに、演算部131および記憶部132を含む。演算部131は、測定部110から出力されたキャリブレータ信号に基づいて、測定項目毎のキャリブレーションテーブルを作成する。演算部131は、測定部110から出力された分析信号とキャリブレーションテーブルとに基づいて、測定項目毎の分析データを算出する。記憶部132はハードディスクなどを備え、キャリブレーションテーブルや分析データなどを記憶する。演算部131は、キャリブレーションテーブルや分析データを、必要に応じて出力部140へ出力する。
【0019】
出力部140はさらに、印刷部141、表示部142およびオンライン部143を含む。印刷部141はプリンタなどを備え、演算部131から出力されたキャリブレーションテーブルや分析データを予め設定されたフォーマットでプリンタ用紙などに印刷する。表示部142はCRT(cathode-ray tube)やLCD(liquid crystal display)などを備え、演算部131から出力されたキャリブレーションテーブルや分析データを表示する。表示部142は、被検体のIDおよび氏名などを入力するための被検体情報入力画面、測定項目毎の分析条件を設定するための分析条件設定画面、サンプル毎の測定項目を選択設定するための測定項目設定画面などを、システム制御部160の制御の下に表示する。オンライン部143は、演算部131から出力されたキャリブレーションテーブルや分析データを、ネットワークを介して他の装置へ送信する。
【0020】
操作部150は、キーボード、マウス、ボタン、あるいはタッチキーパネルなどの入力デバイスを備える。操作部150は、測定項目毎の分析条件の設定、被検体の被検体IDや被検体名などの被検体情報の入力、サンプル毎の測定項目の選択入力、各測定項目のキャリブレーションやサンプル測定などのために操作者により操作される。操作部150は、操作者による操作の内容を表すコマンド信号をシステム制御部160へ出力する。
【0021】
システム制御部160は、CPUと記憶回路とを備え、自動分析装置100の各部を統括して制御する。具体的にはシステム制御部160は、操作部150から供給されるコマンド信号に基づいて、測定項目の分析条件、被検体情報、サンプル毎の測定項目などを判定し、これらを情報を記憶しておく。そしてシステム制御部160は、これらの情報に基づいて、一定サイクルの中の所定のシーケンスで測定を行うように測定部110の動作を制御する。システム制御部160は、所要のキャリブレーションテーブルの作成や所要の分析データの算出を行うように分析データ処理部130を制御する。さらにシステム制御部160は、キャリブレーションテーブルや分析データを所要の形態で出力するように出力部140を制御する。
【0022】
図2はサンプル部111、試薬部112および反応部113の構成を示す斜視図である。
【0023】
サンプル部111は、試料容器11、サンプラ12a,12b、ラック13、アーム14、プローブユニット15およびポンプユニット16を含む。
【0024】
試料容器11は、キャリブレータ、精度管理用試料、あるいはサンプルを収容する。
【0025】
サンプラ12aは、多数の試料容器11を円周状に2列配列してセットできる。サンプラ12aは、回転することによって、セットされている試料容器11を上記の円周に沿って移動させる。サンプラ12aにおける試料容器11をセットする位置のそれぞれは、キャリブレータ用のセット位置または精度管理用試料のセット位置に予め割り当てられている。キャリブレータを収容した試料容器11は前者のセット位置にセットされ、精度管理用試料を収容した試料容器11は後者のセット位置にセットされる。
【0026】
サンプラ12bは、多数のラック13をセットできる。ラック13は、複数の試料容器11を直線状に配列してセットできる。ラック13は、試料容器11の配列方向に直交する方向に沿って配列される。サンプラ12bは、ラック13をその配列方向に移動させる。またサンプラ12bは、サンプル吸引位置においては、ラック13をその配列方向に直交する方向にも移動させる。ラック13における試料容器11をセットする位置のそれぞれは、サンプルのセット位置に予め割り当てられており、サンプルを収容した試料容器11がこのセット位置にセットされる。
【0027】
アーム14は、回動が可能なように一端において支持されている。アーム14の他端には、プローブユニット15が取り付けられている。アーム14は、機構部121に属するアーム移動機構121aによって回動される。またアーム14は、アーム移動機構121aによって鉛直方向に移動される。かくしてアーム14は、プローブユニット15を円弧状の軌道に沿って移動させたり上下動させる。ポンプユニット16は、水などの圧力伝達媒体を吸引、吐出することによってプローブユニット15がサンプルを吸引、吐出するための圧力を生じさせる。かくして、これらアーム14、プローブユニット15およびポンプユニット16により、試料容器11に収容されたサンプルを吸引する吸引装置が構成されている。
【0028】
試薬部112は、試薬ボトル21、試薬ラック22a,22b、アーム23a,23b,24a,24b、脚部25a,25b,26a,26bおよび試薬プローブ27a,27b,28a,28bを含む。
【0029】
試薬ボトル21は、サンプルに対して選択的に反応する試薬を収容する。
【0030】
試薬ラック22a,22bは、それぞれ複数の試薬ボトル21を収納する。試薬ラック22a,22bはそれぞれ、上面を開口したほぼ円柱状の容器である。試薬ラック22a,22bはそれぞれ、複数の試薬ボトル21を円周状に2列配列した状態で収容できる。試薬ラック22a,22bは、図1では示されていない後述する回転機構によってそれぞれ回転される。
【0031】
アーム23a,23b,24a,24bは、その一端が脚部25a,25b,26a,26bによってそれぞれ支持されている。アーム23a,23b,24a,24bの他端には、試薬プローブ27a,27b,28a,28bがそれぞれ取り付けられている。
【0032】
脚部25a,25b,26a,26bは、図1では図示されていない周知の構造の回転機構によってそれぞれ回転されることによって、アーム23a,23b,24a,24bをそれぞれ回動させる。脚部25a,25b,26a,26bは、図1においてはその一部のみが示されていて、実際には図示されているよりも長い。そして脚部25a,25b,26a,26bは、図1では図示されていない周知の構造の直線移動機構によってそれぞれに鉛直方向に直線移動される。
【0033】
試薬プローブ27a,27b,28a,28bは、アーム23a,23b,24a,24bおよび脚部25a,25b,26a,26bによって、それぞれ円弧状の軌道に沿って移動されたり、上下動される。試薬プローブ27a,27b,28a,28bは、内部に細い空洞を有していて、この空洞にアーム23a,23b,24a,24bおよび脚部25a,25b,26a,26bを介して図示しないポンプがそれぞれに接続されている。試薬プローブ27a,27b,28a,28bは、接続されたポンプにより生じられた圧力を利用して、試薬を吸引、吐出する。
【0034】
反応部113は、反応容器31、ディスク32、撹拌ユニット33a,33b、測光ユニット34および洗浄ユニット35を含む。
【0035】
反応容器31は、多数が円周状に配列されている。反応容器31は、サンプルと試薬との反応液を収容する。
【0036】
ディスク32は、反応容器31を回転可能に保持する。ディスク32は、反時計回りに、一定角度を4分析サイクルの間に回転する。1分析サイクルは、例えば4.5秒である。ディスク32は、時計回りに回転させるようにしてもよい。
【0037】
撹拌ユニット33aは、2つの撹拌子を備える。撹拌ユニット33aは、反応容器31の上方にそれぞれ相当する2つの撹拌位置と、これとは異なる2つの洗浄位置との間で2つの撹拌子を移動させることができる。また撹拌ユニット33aは、2つの撹拌子を鉛直方向に移動させることができる。撹拌ユニット33aは、2つの洗浄位置において2つの撹拌子をそれぞれ洗浄する機能を備える。この撹拌ユニット33aは、反応容器31に分注されたサンプルと第1の試薬とを撹拌するために使用される。
【0038】
撹拌ユニット33bは、2つの撹拌子を備える。撹拌ユニット33bは、反応容器31の上方にそれぞれ相当する2つの各半日と、これとは異なる2つの洗浄位置との間で2つの撹拌子を移動させることができる。また撹拌ユニット33bは、2つの撹拌子を鉛直方向に移動させることができる。撹拌ユニット33bは、2つの洗浄位置において2つの撹拌子をそれぞれ洗浄する機能を備える。この撹拌ユニット33bは、反応容器31に分注されたサンプルと第1の試薬と第2の試薬とを撹拌するために使用される。
【0039】
測光ユニット34は、反応容器31が測光位置を通過する時に光を照射して、透過した光から設定波長の吸光度を測定する。そして測光ユニット34は、測定した吸光度を表す信号として分析信号を生成する。
【0040】
洗浄ユニット35は、洗浄ノズルおよび乾燥ノズルを備える。洗浄ユニット35は、洗浄ノズルにより、反応容器31内の反応液を吸引するとともに洗浄する。また洗浄ユニット35は、洗浄後の反応容器31内を乾燥ノズルにより乾燥する。洗浄ユニット35で洗浄および乾燥された反応容器31は、測定に再び使用される。
【0041】
(第1の実施形態)
図3は第1の実施形態におけるプローブユニット15の構造を一部破断して示す図である。
【0042】
プローブユニット15は、ノズル15a,15b、探針15c,15dおよび保持部材15e,15f,15gを含む。
【0043】
ノズル15a,15bは、図3においては断面が示されている。ノズル15a,15bは、外形は細長い針状をなしており、内部には両端間に渡って貫通した細孔が形成されている。ノズル15a,15bの細孔には、チューブ17,18を介してポンプユニット16が接続されている。ノズル15a,15bは、ポンプユニット16によって細孔内が負圧とされることによって、先端の開口から細孔内にサンプルを吸引できる。そしてノズル15a,15bは、ポンプユニット16によって細孔内の負圧が解消されることによって、細孔内に保持していたサンプルを吐出する。ノズル15a,15bの材料としては、導電性があり、細孔内が負圧とされても変形せず、かつサンプルの付着による変性が起きにくい材料、すなわち例えばステンレスや白金などが使用される。なお、ポンプユニット16は、ノズル15a,15bのそれぞれの細孔の圧力を個別に調整する機能を備える。
【0044】
探針15c,15dは、導電性があり、かつサンプルの付着による変性が起きにくい材料、すなわち例えばステンレスや白金などを細長い棒状に形成したものである。探針15c,15dは、その先端の位置が、探針15cはノズル15aの先端に対して、また探針15dはノズル15bの先端に対してそれぞれ一定の間隔を保つように、ノズル15a,15bにそれぞれ取り付けられている。なお、ノズル15a,15bに対する探針15c,15dの取付部分においては、ノズル15a,15bと探針15c,15dとは互いに絶縁されている。
【0045】
保持部材15e,15fは、ノズル15aをアーム14の筐体14aまたは支持部材(図示せず)に固定する。保持部材15gは、ノズル15bに固定的に取り付けられている。保持部材15gは、アーム14の筐体14aまたは支持部材(図示せず)に設けられたガイド部14bに取り付けられている。ガイド部14bは、保持部材15gを鉛直方向(図3中においては縦方向)にのみ移動可能なように支持する。かくしてノズル15aはアーム14に対する相対位置を変化できないのに対し、ノズル15bはアーム14に対する鉛直方向についての相対位置を変化可能である。ノズル15bは、ノズル移動機構121bによっても保持されている。ノズル移動機構121bは、ノズル15bのアーム14に対する水平方向についての相対位置を固定するととともに、ノズル15bのアーム14に対する鉛直方向についての相対位置を変化させるようにノズル15bを鉛直方向に往復移動させる。ノズル移動機構121bは、棒状の物体を往復運動させるための周期の機構をそのまま利用できる。なお、ノズル移動機構121bは、機構部121に含まれる。
【0046】
ノズル15a,15bおよび探針15c,15dは、試料容器11のうちの1つの内部に同時に挿入することが可能なように水平方向の相対位置が定められている。また、ノズル15bが可動範囲の最も上側に位置している状態であっても、ノズル15bの先端がノズル15aの先端よりも下方に位置するように、ノズル15a,15bの鉛直方向についての相対位置が定められている。
【0047】
図4はノズル15a,15bおよび探針15c,15dに接続される電気回路の構成を示す図である。なお、この図4に示される電気回路は、ノズル15aおよび探針15cと、ノズル15bおよび探針15dとのそれぞれに一組ずつが設けられる。
【0048】
図4に示すようにプローブユニット15は、図3に示される各要素の他に、電源15h、抵抗器15iおよび界面検出部15jからなる電気回路を含んでいる。
【0049】
電源15hおよび抵抗器15iは、ノズル15a,15bと探針15c,15dとの間に直列に接続される。界面検出部15jは、ノズル15a,15bと抵抗器15iとの接続点に接続される。かくしてこの電気回路では、ノズル15a,15bと探針15c,15dとの間に存在する物質の電気抵抗値R1と抵抗器15iの抵抗値とによって電源15hの出力電圧を分圧して得られる電圧値が界面検出部15jに入力される。界面検出部15jは、この入力電圧値の変化に基づいて、外気とサンプルとの界面(以下、液面と称する)またはサンプル内の血漿成分と血球成分との界面(以下、境界面と称する)を検出する。界面検出部15jでの検出結果は、システム制御部160に与えられる。
【0050】
次に以上のようにプローブユニット15が構成された第1の実施形態における自動分析装置100の動作について説明する。ただし、第1の実施形態における自動分析装置100における特徴的な動作は、試料容器11の内部で血漿成分および血球成分とに界面分離した状態にある血液を試料容器11から吸引する動作である。その他の動作は従来よりある同種の自動分析装置と同様で良いので、その説明は省略する。
【0051】
界面分離した血液においては、図3に示すように上方に血漿成分51が、かつ下方に血球成分52がそれぞれ位置する。このような血漿成分51および血球成分52をそれぞれ反応容器31に分注することが必要である場合に、システム制御部160はアーム14を回動させてノズル15a,15bを該当する試料容器11の上方に位置させる。この状態からシステム制御部160は、サンプルの吸引のための処理を以下のように実行する。
【0052】
図5は試料容器11からのサンプルの吸引に係るシステム制御部160の処理手順を示したフローチャートである。
【0053】
ステップSa1においてシステム制御部160は、機構制御部122に指示してアーム14の下降を開始させる。アーム14の下降に伴って、ノズル15a,15bも下降してゆく。なお、この時点においてノズル15bは、最上端の位置(以下、基準位置と称する)にある。
【0054】
このままアーム14を下降させてゆくと、まずノズル15bが、さらにしばらくしてノズル15aが試料容器11に挿入される。さらにアーム14を降下させてゆくと、まずノズル15bが、さらにしばらくしてノズル15aが血液に到達する。
【0055】
さて、ノズル15a,15bの先端が液面に到達していないとき、ノズル15a,15bと探針15c,15dとの間には外気が存在するだけであるから、ノズル15a,15bと探針15c,15dとは互いに絶縁されている。このため抵抗器15iに電流は流れず、界面検出部15jに電圧は入力されない。ノズル15a,15bの先端が液面に到達すると、ノズル15a,15bと探針15c,15dとが血漿成分51を介して導通する。このため、抵抗器15iに電流が流れるようになり、界面検出部15jに電圧が入力されるようになる。さらにノズル15a,15bの先端が境界面に到達すると、ノズル15a,15bと探針15c,15dとを導通させる物質が血漿成分51から血球成分52に代わるために抵抗値R1が変化し、界面検出部15jに入力される電圧値が変化する。そこで、ノズル15aに接続された界面検出部15jでは、液面での上記の電圧変化が生じたことに応じて、ノズル15aが液面に到達したことを検出する。またノズル15bに接続された界面検出部15jでは、界面での上記の電圧変化が生じたことに応じて、ノズル15bが境界面に到達したことを検出する。
【0056】
アーム14が下降している状態でシステム制御部160はステップSa2乃至ステップSa4の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、アーム14が予め定められた下限に到達するか、ノズル15aの液面到達が検出されるか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0057】
さて、試料容器11に規定量のサンプルが収容されていない場合、ノズル15aの液面到達が検出されるよりも前にアーム14が下限に到達する。また、血漿成分51の量が少ない場合、ノズル15aの液面到達が検出されるよりも前にノズル15bの境界面到達が検出される。そしてこれらのケースでは、血漿成分51および血球成分52の双方を正しく吸引できないおそれがある。そこでこのような場合には、システム制御部160はステップSa2またはステップSa3からステップSa5へ移行する。ステップSa5においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSa6において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0058】
一方、システム制御部160がステップSa2乃至ステップSa4の待ち受け状態にあるときに、ノズル15aの液面到達が検出されたならば、システム制御部160はステップSa4からステップSa7へ移行する。ステップSa7においてシステム制御部160は、ノズル15aの液面到達が検出された時点からアーム14が規定量だけ追加して下降するのを待つ。なおこのアーム14の追加下降は、ノズル15aの先端を、血漿成分51を吸引するのに十分な程度に血漿成分51内へ挿入するために行うものである。
【0059】
図6はアーム14の追加下降が終了した状態の一例を示す図である。
【0060】
この追加下降が終了したならば、システム制御部160はステップSa7からステップSa8へ移行する。ステップSa8においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSa9において、機構制御部122に指示してノズル移動機構121bを動作させ、ノズル15bの下降を開始させる。そしてノズル15bが下降している状態でシステム制御部160は、ステップSa10およびステップSa11の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、ノズル15bが予め定められた下限に到達するか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0061】
さて、血球成分52の量が多い場合、ノズル15bの境界面到達が検出されるよりも前にノズル15bが下限に到達することがある。そしてこの場合には、ノズル15bの先端を血球成分52に挿入することができず、血球成分52を正しく吸引できない。そこでこのような場合には、システム制御部160はステップSa10からステップSa12へ移行する。ステップSa12においてシステム制御部160は、機構制御部122に指示してノズル15bの下降を停止させる。こののちにシステム制御部160はステップSa13において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0062】
一方、システム制御部160がステップSa10およびステップSa11の待ち受け状態にあるときに、ノズル15bの境界面到達が検出されたならば、システム制御部160はステップSa11からステップSa14へ移行する。そしてステップSa14においてシステム制御部160は、ノズル15bの境界面到達が検出された時点からノズル15bが規定量だけ追加して下降するのを待つ。なおこのノズル15bの追加下降は、ノズル15bの先端を、血球成分52を吸引するのに十分な程度に血球成分52内へ挿入するために行うものである。
【0063】
この追加下降が終了したならば、システム制御部160はステップSa14からステップSa15へ移行する。ステップSa15においてシステム制御部160は、機構制御部122に指示してノズル15bの下降を停止させる。これにより図7に示すように、ノズル15aはその先端が血漿成分51に挿入された状態で、またノズル15bはその先端が血球成分52に挿入された状態でそれぞれ停止している。システム制御部160はステップSa16において、機構制御部122に指示してノズル15a,15bのそれぞれの細孔に同時に負圧を生じさせる。これにより、ノズル15a,15bにより血漿成分51および血球成分52が同時に吸引される。
【0064】
こののちにシステム制御部160はステップSa17において、機構制御部122に指示してノズル移動機構121bを動作させ、ノズル15bを基準位置まで引き上げる。さらにシステム制御部160はステップSa18において、機構制御部122に指示してアーム14を最上端の位置まで上昇させる。
【0065】
以上のように第1の実施形態によれば、血漿成分51および血球成分52を同時に吸引することが可能である。このため、吸引工程に要する時間を、血漿成分51の吸引と血球成分52の吸引とを時系列的に行う場合に比べて半分程度まで短縮することができる。そしてこの吸引工程の時間短縮により、検査時間の時間短縮を図ることが可能となる。
【0066】
また第1の実施形態によれば、ノズル15bのみを下降させ、ノズル15aとノズル15bとの鉛直方法についての相対的な位置関係を変更することができるので、ノズル15aおよびノズル15bのそれぞれの先端を血漿成分51および血球成分52をそれぞれ吸引するのに適当な量だけ血漿成分51および血球成分52に挿入した状態を形成することが可能である。そしてこの結果、血漿成分51および血球成分52を的確に吸引することが可能である。
【0067】
(第2の実施形態)
図8は第2の実施形態におけるプローブユニット15の構造を一部破断して示す図である。なお、図3と同一部分には同一符号を付し、その詳細な説明は省略する。
【0068】
プローブユニット15は、ノズル15a,15b、探針15c,15dおよび保持部材15e,15f,15m,15nを含む。
【0069】
すなわちプローブユニット15は、第2の実施形態においては第1の実施形態における保持部材15gを備えておらず、代わりに保持部材15m,15nを備える。また、筐体14aにガイド部14bは形成されておらず、かつ機構部121にノズル移動機構121bも含まれない。
【0070】
保持部材15m,15nは、ノズル15bを筐体14aまたは支持部材(図示せず)に固定する。
【0071】
ノズル15a,15bおよび探針15c,15dは、試料容器11のうちの1つの内部に同時に挿入することが可能なように水平方向の相対位置が定められている。また、ノズル15bの先端がノズル15aの先端よりも下方に位置するように、ノズル15a,15bの鉛直方向についての相対位置が定められている。さらにノズル15bの先端がノズル15aの先端との鉛直方向についての離間間隔は、液面と境界面との間の標準的な間隔と同程度に定められる。
【0072】
次に以上のようにプローブユニット15が構成された第2の実施形態における自動分析装置100の動作について説明する。ただし、第2の実施形態における自動分析装置100における特徴的な動作は、試料容器11の内部で血漿成分および血球成分とに界面分離した状態にある血液を試料容器11から吸引する動作である。その他の動作は従来よりある同種の自動分析装置と同様で良いので、その説明は省略する。
【0073】
システム制御部160はアーム14を回動させてノズル15a,15bを、吸引対象となる血液が収容された試料容器11の上方に位置させる。この状態からシステム制御部160は、サンプルの吸引のための処理を以下のように実行する。
【0074】
図9は試料容器11からのサンプルの吸引に係るシステム制御部160の処理手順を示したフローチャートである。
【0075】
ステップSb1においてシステム制御部160は、機構制御部122に指示してアーム14の下降を開始させる。アーム14の下降に伴って、ノズル15a,15bも下降してゆく。
【0076】
アーム14が下降している状態でシステム制御部160はステップSb2乃至ステップSb4の待ち受け状態となる。この待ち受け状態においてシステム制御部160は、アーム14が予め定められた下限に到達するか、ノズル15aの液面到達が検出されるか、あるいはノズル15bの境界面到達が検出されるのを待ち受ける。
【0077】
さて、システム制御部160がステップSb2乃至ステップSb4の待ち受け状態にあるときに、ノズル15aの液面到達が検出されたならば、システム制御部160はステップSb3からステップSb5へ移行する。そしてステップSb5においてシステム制御部160は、液面検出フラグをONする。こののちにシステム制御部160は、ステップSb7へ進む。
【0078】
一方、システム制御部160がステップSb2乃至ステップSb4の待ち受け状態にあるときに、ノズル15bの境界面到達が検出されたならば、システム制御部160はステップSb4からステップSb6へ移行する。そしてステップSb6においてシステム制御部160は、境界面検出フラグをONする。こののちにシステム制御部160は、ステップSb7へ進む。
【0079】
なお、液面検出フラグおよび境界面検出フラグは、例えばシステム制御部160が有するメモリを利用して実現される。そして液面検出フラグおよび境界面検出フラグは、図9の処理を開始する際にともにOFFに初期化される。
【0080】
ステップSb7においてシステム制御部160は、液面検出フラグおよび境界面検出フラグの両方ともがONになっているか否かを確認する。そして、液面検出フラグおよび境界面検出フラグのいずれかでもOFFであるならば、システム制御部160はステップSb2乃至ステップSb4の待ち受け状態に戻る。
【0081】
さて、試料容器11に収容されている血漿成分51および血球成分52のいずれか一方でも大幅に少ない場合、ノズル15aの液面到達およびノズル15bの境界面到達の双方が検出されるよりも前にアーム14が下限に到達することになる。そこでこの場合にシステム制御部160は、ステップSb2からステップSb8へ進む。ステップSb8においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSb9において、表示部142に指示し、エラー表示を行わせる。これにより、試料容器11にサンプルが正しく収容されていないことを操作者に対して警報する。
【0082】
一方、アーム14が下限に到達する前にノズル15aの液面到達およびノズル15bの境界面到達の双方が検出されたならば、システム制御部160はステップSb7において液面検出フラグおよび境界面検出フラグの両方ともがONであることを確認できるので、この場合にシステム制御部160はステップSb7からステップSb10へ進む。ステップSb10においてシステム制御部160は、その時点からアーム14が規定量だけ追加して下降するのを待つ。なおこのアーム14の追加下降は、ノズル15aおよびノズル15bの先端を、血漿成分51および血球成分52を吸引するのに十分な程度に血漿成分51および血球成分52内へ挿入するために行うものである。図8はアーム14の追加下降が終了した状態の一例を示している。
【0083】
この追加下降が終了したならば、システム制御部160はステップSb10からステップSb11へ移行する。ステップSb11においてシステム制御部160は、機構制御部122に指示してアーム14の下降を停止させる。こののちにシステム制御部160はステップSb12において、機構制御部122に指示してノズル15a,15bのそれぞれの細孔に同時に負圧を生じさせる。これにより、ノズル15a,15bにより血漿成分51および血球成分52が同時に吸引される。
【0084】
こののちにシステム制御部160はステップSb13において、機構制御部122に指示してアーム14を最上端の位置まで上昇させる。
【0085】
以上のように第2の実施形態によれば、血漿成分51および血球成分52を同時に吸引することが可能である。このため、吸引工程に要する時間を、血漿成分51の吸引と血球成分52の吸引とを時系列的に行う場合に比べて半分程度まで短縮することができる。そしてこの吸引工程の時間短縮により、検査時間の時間短縮を図ることが可能となる。
【0086】
また第2の実施形態によれば、ノズル15a,15bを血液中に挿入するためにアーム14を下降させるだけであるので、前記第1の実施形態に比べて構造および制御が簡略化できる。ただし、血漿成分51の量のばらつきに対する適応性は、第2の実施形態よりも第1の実施形態のほうが高い。
【0087】
この実施形態は、次のような種々の変形実施が可能である。
【0088】
第1の実施形態では、ノズル15aをアーム14に対して移動可能とし、ノズル15bはアーム14に固定しても良い。また、ノズル15a,15bの双方を個別に移動可能としても良い。なお、ノズル15aを移動可能とする場合には、例えばノズル15bと同様な支持構造とノズル移動機構とを備えれば良い。
【0089】
前記各実施形態では、アーム14の移動によるノズル15a,15bの移動方向およびノズル移動機構121bによるノズル15bの移動方向をいずれも鉛直方向としているが、ノズル15a,15bの移動方向はノズル15a,15bを試料容器11の内部にその開口から挿入できる方向であればいかなる方向であっても良い。
【0090】
前記各実施形態では、プローブユニット15が備えるノズルは3つ以上であっても良い。
【0091】
吸引対象とする物質は血漿成分51および血球成分52以外の任意の物質であって良いし、それは血液の成分である必要もない。
【0092】
前記各実施形態のプローブユニット15は、血液検査装置などのような自動分析装置以外の装置にも適用可能である。
【0093】
液面および境界面の検出には、ノズルを探針の1つとして使用せずに電気抵抗値の変化を検出するセンサを使用しても良い。あるいは静電容量の変化、圧力の変化、あるいは吸光度の変化を利用して液面および境界面を検出しても良い。
【0094】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0095】
11…試料容器、12a,12b…サンプラ、13…ラック、14…アーム、14a…筐体、14b…ガイド部、15…プローブユニット、15a,15b…ノズル、15c,15d…探針、15e,15f,15g,15m,15n…保持部材、15h…電源、15i…抵抗器、15j…界面検出部、16…ポンプユニット、17,18…チューブ、100…自動分析装置、110…測定部、120…分析制御部、121…機構部、121a…アーム移動機構、121b…ノズル移動機構、122…機構制御部、130…分析データ処理部、140…出力部、150…操作部、160…システム制御部。
【特許請求の範囲】
【請求項1】
容器に収容された液状物に含まれた物質を吸引する吸引装置において、
流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、
前記複数のノズルの先端部を前記容器に対する挿抜方向に移動可能に、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に前記複数のノズルを支持する1つの支持部材と、
前記複数のノズルの先端部をいずれも前記挿抜方向に移動させるように前記複数のノズルをそれぞれ移動させるもので、前記複数のノズルの先端部の前記挿抜方向についての相対的な位置関係を変化させることが可能な移動ユニットとを具備したことを特徴とする吸引装置。
【請求項2】
前記液状物と外気との界面および前記液状物が前記容器中で前記液状物が相分離したことにより生じる少なくとも1つの界面をそれぞれ検出する界面センサをさらに備え、
前記移動ユニットは、前記界面センサにより検出された複数の界面に基づいて、前記相分離により形成された複数の領域内に前記複数のノズルの先端部をそれぞれ位置させるように前記複数のノズルを移動させることを特徴とする請求項1に記載の吸引装置。
【請求項3】
容器に収容された液状物に含まれた物質を吸引する吸引装置において、
流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、
かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に、かつ前記複数のノズルのそれぞれの先端部についての前記液状物への進入深度が互いに異なるように前記複数のノズルを固定的に支持する1つの支持部材と、
前記複数のノズルのそれぞれの先端部が前記容器に対して挿抜する方向に移動するように前記支持部材を移動させる移動ユニットとを具備したことを特徴とする吸引装置。
【請求項4】
前記液状物と外気との界面および前記液状物が前記容器中で前記液状物が相分離したことにより生じる少なくとも1つの界面をそれぞれ検出する界面センサをさらに備え、
前記移動ユニットは、前記界面センサにより検出された複数の界面に基づいて、前記相分離により形成された複数の領域内に前記複数のノズルの先端部をそれぞれ位置させるように前記支持部材を移動させることを特徴とする請求項3に記載の吸引装置。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の吸引装置と、
前記吸引装置が備える複数のノズルのそれぞれによって前記容器から吸引された物質に基づいて前記液状物に関するそれぞれ異なる性質を分析する分析ユニットとを具備したことを特徴とする分析装置。
【請求項1】
容器に収容された液状物に含まれた物質を吸引する吸引装置において、
流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、
前記複数のノズルの先端部を前記容器に対する挿抜方向に移動可能に、かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に前記複数のノズルを支持する1つの支持部材と、
前記複数のノズルの先端部をいずれも前記挿抜方向に移動させるように前記複数のノズルをそれぞれ移動させるもので、前記複数のノズルの先端部の前記挿抜方向についての相対的な位置関係を変化させることが可能な移動ユニットとを具備したことを特徴とする吸引装置。
【請求項2】
前記液状物と外気との界面および前記液状物が前記容器中で前記液状物が相分離したことにより生じる少なくとも1つの界面をそれぞれ検出する界面センサをさらに備え、
前記移動ユニットは、前記界面センサにより検出された複数の界面に基づいて、前記相分離により形成された複数の領域内に前記複数のノズルの先端部をそれぞれ位置させるように前記複数のノズルを移動させることを特徴とする請求項1に記載の吸引装置。
【請求項3】
容器に収容された液状物に含まれた物質を吸引する吸引装置において、
流路をそれぞれが有するとともに、当該流路を先端部近傍にて外部に開放した複数のノズルと、
かつ前記複数のノズルのそれぞれの先端部を前記容器内に同時に位置させることを可能に、かつ前記複数のノズルのそれぞれの先端部についての前記液状物への進入深度が互いに異なるように前記複数のノズルを固定的に支持する1つの支持部材と、
前記複数のノズルのそれぞれの先端部が前記容器に対して挿抜する方向に移動するように前記支持部材を移動させる移動ユニットとを具備したことを特徴とする吸引装置。
【請求項4】
前記液状物と外気との界面および前記液状物が前記容器中で前記液状物が相分離したことにより生じる少なくとも1つの界面をそれぞれ検出する界面センサをさらに備え、
前記移動ユニットは、前記界面センサにより検出された複数の界面に基づいて、前記相分離により形成された複数の領域内に前記複数のノズルの先端部をそれぞれ位置させるように前記支持部材を移動させることを特徴とする請求項3に記載の吸引装置。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の吸引装置と、
前記吸引装置が備える複数のノズルのそれぞれによって前記容器から吸引された物質に基づいて前記液状物に関するそれぞれ異なる性質を分析する分析ユニットとを具備したことを特徴とする分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−216954(P2010−216954A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−63250(P2009−63250)
【出願日】平成21年3月16日(2009.3.16)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月16日(2009.3.16)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]