
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、負圧によるワークを吸着する吸着ヘッドの駆動方法に関する。
【背景技術】
【0002】
真空吸着チャックによるピックアンドプレース方式の搬送装置は、大気圧と広義の真空圧との差圧を吸着力として利用し、専用の搬送路を必要とせず、重量物以外の多種多様な搬送物品(ワークともいう)を比較的簡単な作動機構で搬送できることが知られている。
【0003】
この種の搬送装置は、例えば、自動車などの自動組み立て製造ラインや、電子部品、光学部品などを用いた機械の製造工程、電子写真印刷機の紙送り機構などに使用されている。
【0004】
真空チャック方式の特徴の一つは、ワークの吸着の成否を、吸引配管中に設置された圧力センサから出力される圧力(吸引圧ともいう)値をモニタすることにより確認することができる点にある(例えば、特許文献1参照)。
【0005】
吸着ヘッドへのワークの吸着により吸着ヘッドの吸引口が塞がれ、吸引圧が急激に低下する(真空に近い状態になる)。これとは反対に、吸着ヘッドにワークが吸着されなかった場合には、空気のリークにより吸引圧が低下しない。
【0006】
真空チャック方式によりワークを吸着できるか否かは、ワークに密着する吸着ヘッドの吸着面が形成する閉曲線によって切り取られるワークの表面積、大気圧と真空圧との差圧、および垂直吊りの場合にはワークの自重により左右される。
【0007】
自動分析装置内の反応容器の搬送機構として真空チャック方式を採用した自動分析装置が開示されている(例えば、特許文献2参照)。これは、下端に環状弾性体を装着したパッドを有するエアの吸引・吐出が可能な吸着ヘッドを具備し、該パッドを、上部開口に密閉シールを施した反応容器上部に押し当てた状態でエアを吸引することによって容器を密着し、この状態で反応容器を搬送するものである。
【特許文献1】特開2001−54886号公報
【特許文献2】特公平7−95070号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、反応容器と反応容器ストレージラックとの間には隙間が形成されているため、反応容器が位置ずれを起こしたり、反応容器ストレージラック内で傾くおそれがある。
【0009】
そのため、吸着ヘッドと反応容器との間に隙間が生じ、そこから空気がリークして、反応容器がピックアップに失敗するおそれがある。その結果、処理時間のロスにより、自動分析装置の高速処理化を妨げるおそれがある。
【0010】
ここで、各反応容器の位置を位置決めセンサーなどの検知手段を用いて検知し、この検知結果に基づき吸着ヘッドを移動させる方法も考えられるが、この方法では装置が煩雑化するとともにコストが増大する。
【0011】
そこで、本願発明は、例えば自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するための、本願発明の負圧によりワークを吸着する吸着ヘッドの駆動方法は、ワークに対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に前記吸着ヘッドを配置した状態で、前記吸着ヘッドに負圧を加える第1のステップと、該第1のステップにおいて前記吸着ヘッドにより前記ワークを吸着できなかった場合には、前記吸着ヘッドに負圧を加えた状態で、前記吸引推定領域において前記吸着ヘッドを移動させる第2のステップと、を有することを特徴とする。
【0013】
ここで、前記第2のステップにおいて、予め設定された設定時間又は設定回数のもとに前記予備位置においてワークを吸着し得るとされる吸引圧が得られなかった場合には、前記吸引推定領域で前記吸着ヘッドを移動させることができる。
【0014】
また、前記第2のステップにおいて、前記吸着ヘッドを前記ワークから退避する方向に移動させてもよいし、前記吸着ヘッドを前記ワークの外形に沿った方向に移動させてもよい。
【0015】
前記予備位置は、前記ワークから離間した位置に設定するのが好ましい。
【発明の効果】
【0016】
本願発明によれば、吸引推定領域で吸着ヘッドを移動させることにより、高い確率でワークを吸着することができる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しながら、本発明の実施例について詳細に説明する。
【0018】
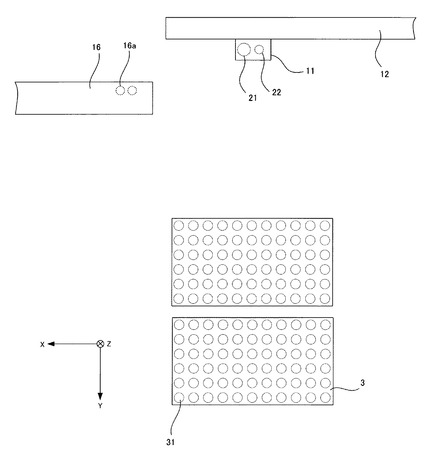
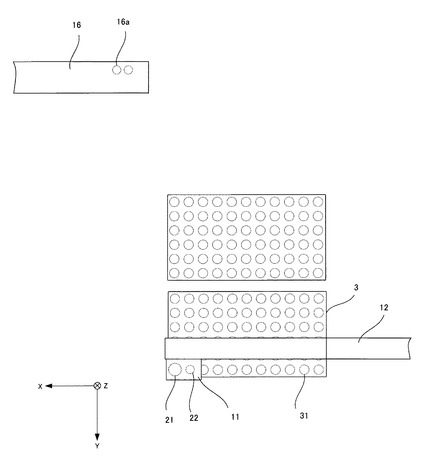
ここで、図1及び図2は、本発明の吸着ヘッドを適用した自動分析装置の平面図であり、図1は吸着前の状態を図示しており、図2は吸着時の状態を図示している。ただし、これらの図では、説明を簡素化するため、自動分析装置の下工程に設置される機器(例えば、分注装置、インキュベータ)を省略して図示している。図3は、ピックアップ装置の断面図である。図4は、ピックアップ装置の動作制御を行うためのブロック図である。
【0019】
これらの図において、ピックアップ装置11は、搬送アーム12に支持されており、ピックアップ装置搬送モータユニット53(図4参照)から駆動力を受けて搬送アーム12上をX軸方向にスライド移動する。この搬送アーム12は、搬送アーム駆動モータユニット52(図4参照)から駆動力を受けて、Y軸方向、Z軸方向にピックアップ装置11とともに一体的に移動する。
【0020】
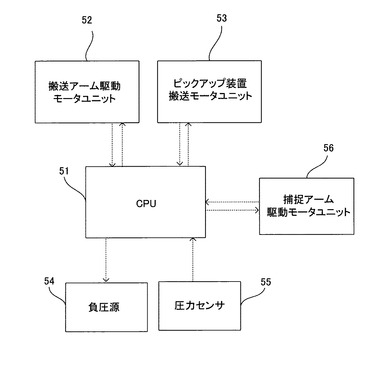
CPU51(図4参照)は搬送アーム駆動モータユニット52及びピックアップ装置搬送モータユニット53に対して電気的に接続されており、不図示のコンピュータを介して入力された位置情報からこれらのモータユニット52、53の必要駆動パルス数を算出し、この駆動パルス数に応じた駆動を行うように、駆動信号を出力する。
【0021】
この駆動信号に基づき、ピックアップ装置11及び搬送アーム12には、前記位置情報に応じた位置、例えば、図2に図示するように、容器ストレージラック3の左下隅に配置される反応容器(ワーク)31の真上に移動する。
【0022】
ピックアップ装置11には、容器ストレージラック3にマトリクス状に配置された反応容器31をピックアップするための容器ピックアップ装置(吸着ヘッド)21と、不図示のピペットチップをピックアップするためのチップピックアップ装置22が搭載されている。
【0023】
反応容器31には、測定対象物質に対する抗体等を固定した水不溶性固相や、測定対象物質に対する、酵素等で標識された標識抗体等の試薬が収容されており、分注液の注入などの各種操作に対応させるために上部開口が設けられており、この上部開口は密閉シールにより覆われている。なお、上記免疫測定用の反応容器31に代えて、試料中の微量生理活性物質を検出するために用いられる生化学反応用容器を用いることもできる。
【0024】
搬送レーン16は、X軸方向にスライド移動可能に設けられており、この搬送レーン16の略一端部に設定された容器載置予定位置16aに、容器ピックアップ装置21で吸着された反応容器31が搬送されるようになっている。
【0025】
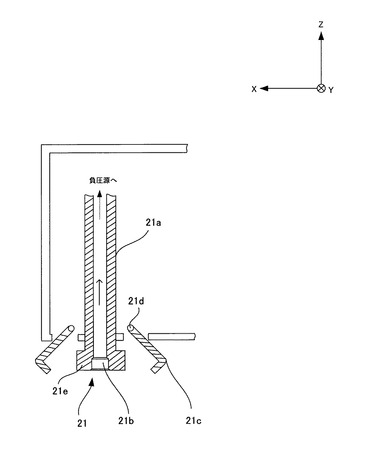
次に、図3及び図4を参照しながら、容器ピックアップ装置21の構成について詳細に説明する。
【0026】
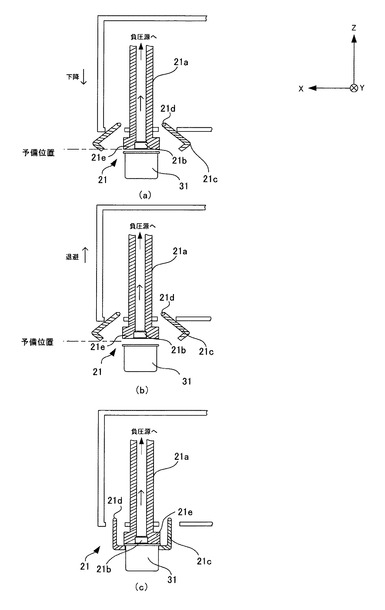
容器ピックアップ装置21は、負圧源54(図4参照)に接続された吸引パイプ21aと、この吸引パイプ21aの先端部に一体的に形成され、反応容器31を吸着するための吸着部21bと、吸着部21bの周囲に設けられた吸着パット21eと、吸着部21bに吸着された反応容器31を挟持するための一対の容器捕捉アーム21cとから構成されている。
【0027】
このように、吸着部21bの周囲に吸着パット21eを設けることにより、吸着部21b及び反応容器31の中心軸が位置ずれした場合であっても、確実に反応容器31を吸着することができる。
【0028】
吸引パイプ21aには、圧力センサ55が設けられており、この圧力センサ55から出力された圧力情報はCPU51に入力される。
【0029】
各容器捕捉アーム21cは、アーム回転軸21dに対して回転可能に支持されており、捕捉アーム駆動モータユニット56から駆動力を受けて回転される。なお、搬送アーム駆動モータユニット52、ピックアップ装置搬送モータユニット53、捕捉アーム駆動モータユニット56には、例えば、ステッピングモータ、超音波モータを用いることができる。
【0030】
チップピックアップ装置22は、負圧源からの負圧によりピペットチップをピックアップするが、詳細な説明については省略する。なお、この負圧源は、容器ピックアップ装置21と共用してもよいし、別体で構成することもできる。
【0031】
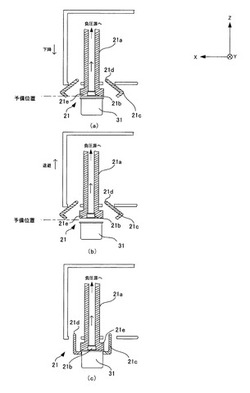
次に、図5及び図6を参照しながら、容器ピックアップ装置21の動作について説明する。ここで、図5は容器ピックアップ装置21の動作説明図であり、図6は容器ピックアップ装置の動作方法を示すフローチャートである。なお、下記の動作制御は、CPU51によって実行されるものとする。
【0032】
初期状態において、ピックアップ装置11は図1に図示する位置で待機しているものとする。
【0033】
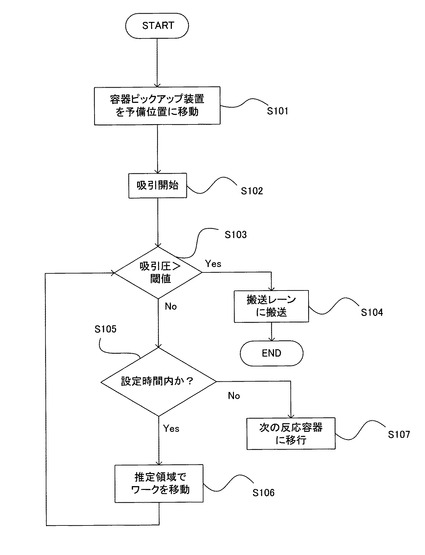
不図示の動作開始ボタンがオンされると、搬送アーム駆動モータユニット52及びピックアップ装置搬送モータユニット53により、ピックアップ装置11は容器ストレージラック3に収容された反応容器31の真上に設定された予備位置に移動する(ステップS101、図5(a)参照)。
【0034】
ここで、予備位置は、反応容器31に対する吸引力を発生しうると推定される推定領域(吸引推定領域)の内部に設定されており、反応容器31から離間した位置に設定するのが好ましい。
【0035】
これは、容器ピックアップ装置21の吸着部21bを反応容器31に接触させるよりも、反応容器31から離間した位置に配置するほうがピックアップに成功する確率が高いという経験的な事実に基づくものである。
【0036】
その理由は、反応容器31から離間した位置に吸着部21bを配置することにより、吸着部21bと反応容器31との間に反応容器31の移動スペースが形成され、粘性を有する空気の流れにより、反応容器31が容器ストレージラック3から浮き上がって吸着部21bに吸着されるためだと考えられる。
【0037】
これにより、予備位置で反応容器31をピックアップする確率が高まり、推定領域内でピックアップ装置11を移動させる(詳細については後述する)回数および時間(つまり、タイムロス)を減らすことができ、その結果、自動分析装置の処理速度を速めることができる。
【0038】
また、推定領域については、予備位置を複数の異なる位置に設定して、ピックアップ動作を繰り返し行うことにより、実験的に導くことができる。例えば、ピックアップ動作を100回行い、そのうちピックアップの失敗が2回未満であれば、推定領域に属すると判定することができる。
【0039】
また、予備位置は、この推定領域の中で最もピックアップの失敗が少なかった位置に設定するのが好ましい。これにより、予備位置で反応容器31をピックアップできる確率が高まり、推定領域内でピックアップ装置11を移動させる(詳細については後述する)回数および時間(つまり、タイムロス)を減らすことができるため、自動分析装置の処理速度を速めることができる。
【0040】
容器ピックアップ装置21の動作説明に戻る。ステップS101において、容器ピックアップ装置21が予備位置に移動すると、負圧源54に動作開始信号が出力され、容器ピックアップ装置21による吸引動作が開始される(ステップS102)。
【0041】
CPU51は、圧力センサ55から出力される圧力情報に基づき、吸引圧が閾値を超えたかどうかをモニタしており(ステップS103)、吸引圧が閾値を超えた場合には、反応容器31の吸着に成功したものと判別して、反応容器31を搬送レーン16に搬送するよう搬送アーム駆動モータユニット52、ピックアップ装置搬送モータユニット53及び捕捉アーム駆動モータユニット56に駆動信号を出力する(ステップS104)。
【0042】
ステップS105において、設定時間内に吸引圧が閾値を超えなかったと判別した場合には、該推定領域内で容器ピックアップ装置21を移動させるように、ピックアップ装置搬送モータユニット53及び捕捉アーム駆動モータユニット56に駆動信号を出力する(ステップS106)。
【0043】
具体的には、予備位置にある容器ピックアップ装置21を反応容器31の上側に退避させる方向に移動させたり、反応容器31の外形に沿った方向(つまり、YZ面内方向)に移動させることもできる。さらに、これらの軌道を組み合わせて、容器ピックアップ装置21を反応容器31から退避する方向に螺旋軌道を描きながら移動させてもよい。
【0044】
このように、予備位置から容器ピックアップ装置21を退避する方向に移動させることにより、予備位置と反応容器31との間隔が狭すぎて吸着に失敗した場合であっても、高い確率で反応容器31を吸着することができる。
【0045】
従来は、ピックアップの位置を予備試験などにより予め設定し、吸引圧などを観察しながら真空吸着の成否を1回判断し、そこで失敗すればそのワークのピックアップをあきらめ、隣のワークのピックアップを試みるというのが通常であった。
【0046】
これに対して、本実施形態の構成によれば、予備位置での吸着に失敗した場合には、推定領域で容器ピックアップ装置21を移動させることにより反応容器31を高い確率で吸着できるため、従来の自動分析装置よりもタイムロスを少なくすることができる。
【0047】
ステップS105で設定時間内に吸引圧が閾値を超えなかったと判別した場合には、ステップS107に進み、次の反応容器31の吸着を行う。
(他の実施例)
上述の実施形態では、ステップS105において容器ピックアップ装置21を推定領域内で移動させるかどうかの判別を設定時間をカウントすることにより行ったが、設定回数をカウントすることにより行ってもよい。例えば、設定回数を5回に設定し、各吸引位置にて0.075秒間吸引動作を行って吸着できなかった場合に、ピックアップの失敗と判別することができる。
【0048】
また、ステップS103において、吸引圧が閾値を超えたかどうかで吸着の有無を判別したが、他の方法を用いることもできる。例えば、容器ストレージラック3に反応容器31の位置を検出する位置センサ(フォトダイオードなど)を配置して、この位置センサから出力される位置情報に基づき、吸着の有無を判断してもよい。
【0049】
上述の容器ピックアップ装置21は、反応容器31以外の他のワークを搬送するために用いることもできる。また、上述の容器ピックアップ装置21を用いて、ワークを横から吸着することもできる。
【0050】
吸着部21bに反応容器31が吸着されることにより生じる衝撃力を緩和するための緩衝手段(例えば、弾性部材)を設けてもよい。
【図面の簡単な説明】
【0051】
【図1】自動分析装置の平面図である(反応容器の吸着前)。
【図2】自動分析装置の平面図である(反応容器の吸着時)。
【図3】ピップアップ装置の断面図である。
【図4】ピックアップ装置の動作制御を行うためのブロック図である。
【図5】容器ピックアップ装置の動作説明図である。
【図6】容器ピックアップ装置の動作方法を示すフローチャートである。
【符号の説明】
【0052】
3 容器ストレージラック
11 ピックアップ装置
12 搬送アーム
16 搬送レーン
16a 容器載置予定位置
21 容器ピックアップ装置
21a 吸引パイプ
21b 吸着部
21c 容器捕捉アーム
21e 吸着パット
21d アーム回転軸
22 チップピックアップ装置
31 反応容器
51 CPU
52 搬送アーム駆動モータユニット
53 ピックアップ装置搬送モータユニット
54 負圧源
55 圧力センサ
【技術分野】
【0001】
本発明は、負圧によるワークを吸着する吸着ヘッドの駆動方法に関する。
【背景技術】
【0002】
真空吸着チャックによるピックアンドプレース方式の搬送装置は、大気圧と広義の真空圧との差圧を吸着力として利用し、専用の搬送路を必要とせず、重量物以外の多種多様な搬送物品(ワークともいう)を比較的簡単な作動機構で搬送できることが知られている。
【0003】
この種の搬送装置は、例えば、自動車などの自動組み立て製造ラインや、電子部品、光学部品などを用いた機械の製造工程、電子写真印刷機の紙送り機構などに使用されている。
【0004】
真空チャック方式の特徴の一つは、ワークの吸着の成否を、吸引配管中に設置された圧力センサから出力される圧力(吸引圧ともいう)値をモニタすることにより確認することができる点にある(例えば、特許文献1参照)。
【0005】
吸着ヘッドへのワークの吸着により吸着ヘッドの吸引口が塞がれ、吸引圧が急激に低下する(真空に近い状態になる)。これとは反対に、吸着ヘッドにワークが吸着されなかった場合には、空気のリークにより吸引圧が低下しない。
【0006】
真空チャック方式によりワークを吸着できるか否かは、ワークに密着する吸着ヘッドの吸着面が形成する閉曲線によって切り取られるワークの表面積、大気圧と真空圧との差圧、および垂直吊りの場合にはワークの自重により左右される。
【0007】
自動分析装置内の反応容器の搬送機構として真空チャック方式を採用した自動分析装置が開示されている(例えば、特許文献2参照)。これは、下端に環状弾性体を装着したパッドを有するエアの吸引・吐出が可能な吸着ヘッドを具備し、該パッドを、上部開口に密閉シールを施した反応容器上部に押し当てた状態でエアを吸引することによって容器を密着し、この状態で反応容器を搬送するものである。
【特許文献1】特開2001−54886号公報
【特許文献2】特公平7−95070号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、反応容器と反応容器ストレージラックとの間には隙間が形成されているため、反応容器が位置ずれを起こしたり、反応容器ストレージラック内で傾くおそれがある。
【0009】
そのため、吸着ヘッドと反応容器との間に隙間が生じ、そこから空気がリークして、反応容器がピックアップに失敗するおそれがある。その結果、処理時間のロスにより、自動分析装置の高速処理化を妨げるおそれがある。
【0010】
ここで、各反応容器の位置を位置決めセンサーなどの検知手段を用いて検知し、この検知結果に基づき吸着ヘッドを移動させる方法も考えられるが、この方法では装置が煩雑化するとともにコストが増大する。
【0011】
そこで、本願発明は、例えば自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するための、本願発明の負圧によりワークを吸着する吸着ヘッドの駆動方法は、ワークに対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に前記吸着ヘッドを配置した状態で、前記吸着ヘッドに負圧を加える第1のステップと、該第1のステップにおいて前記吸着ヘッドにより前記ワークを吸着できなかった場合には、前記吸着ヘッドに負圧を加えた状態で、前記吸引推定領域において前記吸着ヘッドを移動させる第2のステップと、を有することを特徴とする。
【0013】
ここで、前記第2のステップにおいて、予め設定された設定時間又は設定回数のもとに前記予備位置においてワークを吸着し得るとされる吸引圧が得られなかった場合には、前記吸引推定領域で前記吸着ヘッドを移動させることができる。
【0014】
また、前記第2のステップにおいて、前記吸着ヘッドを前記ワークから退避する方向に移動させてもよいし、前記吸着ヘッドを前記ワークの外形に沿った方向に移動させてもよい。
【0015】
前記予備位置は、前記ワークから離間した位置に設定するのが好ましい。
【発明の効果】
【0016】
本願発明によれば、吸引推定領域で吸着ヘッドを移動させることにより、高い確率でワークを吸着することができる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しながら、本発明の実施例について詳細に説明する。
【0018】
ここで、図1及び図2は、本発明の吸着ヘッドを適用した自動分析装置の平面図であり、図1は吸着前の状態を図示しており、図2は吸着時の状態を図示している。ただし、これらの図では、説明を簡素化するため、自動分析装置の下工程に設置される機器(例えば、分注装置、インキュベータ)を省略して図示している。図3は、ピックアップ装置の断面図である。図4は、ピックアップ装置の動作制御を行うためのブロック図である。
【0019】
これらの図において、ピックアップ装置11は、搬送アーム12に支持されており、ピックアップ装置搬送モータユニット53(図4参照)から駆動力を受けて搬送アーム12上をX軸方向にスライド移動する。この搬送アーム12は、搬送アーム駆動モータユニット52(図4参照)から駆動力を受けて、Y軸方向、Z軸方向にピックアップ装置11とともに一体的に移動する。
【0020】
CPU51(図4参照)は搬送アーム駆動モータユニット52及びピックアップ装置搬送モータユニット53に対して電気的に接続されており、不図示のコンピュータを介して入力された位置情報からこれらのモータユニット52、53の必要駆動パルス数を算出し、この駆動パルス数に応じた駆動を行うように、駆動信号を出力する。
【0021】
この駆動信号に基づき、ピックアップ装置11及び搬送アーム12には、前記位置情報に応じた位置、例えば、図2に図示するように、容器ストレージラック3の左下隅に配置される反応容器(ワーク)31の真上に移動する。
【0022】
ピックアップ装置11には、容器ストレージラック3にマトリクス状に配置された反応容器31をピックアップするための容器ピックアップ装置(吸着ヘッド)21と、不図示のピペットチップをピックアップするためのチップピックアップ装置22が搭載されている。
【0023】
反応容器31には、測定対象物質に対する抗体等を固定した水不溶性固相や、測定対象物質に対する、酵素等で標識された標識抗体等の試薬が収容されており、分注液の注入などの各種操作に対応させるために上部開口が設けられており、この上部開口は密閉シールにより覆われている。なお、上記免疫測定用の反応容器31に代えて、試料中の微量生理活性物質を検出するために用いられる生化学反応用容器を用いることもできる。
【0024】
搬送レーン16は、X軸方向にスライド移動可能に設けられており、この搬送レーン16の略一端部に設定された容器載置予定位置16aに、容器ピックアップ装置21で吸着された反応容器31が搬送されるようになっている。
【0025】
次に、図3及び図4を参照しながら、容器ピックアップ装置21の構成について詳細に説明する。
【0026】
容器ピックアップ装置21は、負圧源54(図4参照)に接続された吸引パイプ21aと、この吸引パイプ21aの先端部に一体的に形成され、反応容器31を吸着するための吸着部21bと、吸着部21bの周囲に設けられた吸着パット21eと、吸着部21bに吸着された反応容器31を挟持するための一対の容器捕捉アーム21cとから構成されている。
【0027】
このように、吸着部21bの周囲に吸着パット21eを設けることにより、吸着部21b及び反応容器31の中心軸が位置ずれした場合であっても、確実に反応容器31を吸着することができる。
【0028】
吸引パイプ21aには、圧力センサ55が設けられており、この圧力センサ55から出力された圧力情報はCPU51に入力される。
【0029】
各容器捕捉アーム21cは、アーム回転軸21dに対して回転可能に支持されており、捕捉アーム駆動モータユニット56から駆動力を受けて回転される。なお、搬送アーム駆動モータユニット52、ピックアップ装置搬送モータユニット53、捕捉アーム駆動モータユニット56には、例えば、ステッピングモータ、超音波モータを用いることができる。
【0030】
チップピックアップ装置22は、負圧源からの負圧によりピペットチップをピックアップするが、詳細な説明については省略する。なお、この負圧源は、容器ピックアップ装置21と共用してもよいし、別体で構成することもできる。
【0031】
次に、図5及び図6を参照しながら、容器ピックアップ装置21の動作について説明する。ここで、図5は容器ピックアップ装置21の動作説明図であり、図6は容器ピックアップ装置の動作方法を示すフローチャートである。なお、下記の動作制御は、CPU51によって実行されるものとする。
【0032】
初期状態において、ピックアップ装置11は図1に図示する位置で待機しているものとする。
【0033】
不図示の動作開始ボタンがオンされると、搬送アーム駆動モータユニット52及びピックアップ装置搬送モータユニット53により、ピックアップ装置11は容器ストレージラック3に収容された反応容器31の真上に設定された予備位置に移動する(ステップS101、図5(a)参照)。
【0034】
ここで、予備位置は、反応容器31に対する吸引力を発生しうると推定される推定領域(吸引推定領域)の内部に設定されており、反応容器31から離間した位置に設定するのが好ましい。
【0035】
これは、容器ピックアップ装置21の吸着部21bを反応容器31に接触させるよりも、反応容器31から離間した位置に配置するほうがピックアップに成功する確率が高いという経験的な事実に基づくものである。
【0036】
その理由は、反応容器31から離間した位置に吸着部21bを配置することにより、吸着部21bと反応容器31との間に反応容器31の移動スペースが形成され、粘性を有する空気の流れにより、反応容器31が容器ストレージラック3から浮き上がって吸着部21bに吸着されるためだと考えられる。
【0037】
これにより、予備位置で反応容器31をピックアップする確率が高まり、推定領域内でピックアップ装置11を移動させる(詳細については後述する)回数および時間(つまり、タイムロス)を減らすことができ、その結果、自動分析装置の処理速度を速めることができる。
【0038】
また、推定領域については、予備位置を複数の異なる位置に設定して、ピックアップ動作を繰り返し行うことにより、実験的に導くことができる。例えば、ピックアップ動作を100回行い、そのうちピックアップの失敗が2回未満であれば、推定領域に属すると判定することができる。
【0039】
また、予備位置は、この推定領域の中で最もピックアップの失敗が少なかった位置に設定するのが好ましい。これにより、予備位置で反応容器31をピックアップできる確率が高まり、推定領域内でピックアップ装置11を移動させる(詳細については後述する)回数および時間(つまり、タイムロス)を減らすことができるため、自動分析装置の処理速度を速めることができる。
【0040】
容器ピックアップ装置21の動作説明に戻る。ステップS101において、容器ピックアップ装置21が予備位置に移動すると、負圧源54に動作開始信号が出力され、容器ピックアップ装置21による吸引動作が開始される(ステップS102)。
【0041】
CPU51は、圧力センサ55から出力される圧力情報に基づき、吸引圧が閾値を超えたかどうかをモニタしており(ステップS103)、吸引圧が閾値を超えた場合には、反応容器31の吸着に成功したものと判別して、反応容器31を搬送レーン16に搬送するよう搬送アーム駆動モータユニット52、ピックアップ装置搬送モータユニット53及び捕捉アーム駆動モータユニット56に駆動信号を出力する(ステップS104)。
【0042】
ステップS105において、設定時間内に吸引圧が閾値を超えなかったと判別した場合には、該推定領域内で容器ピックアップ装置21を移動させるように、ピックアップ装置搬送モータユニット53及び捕捉アーム駆動モータユニット56に駆動信号を出力する(ステップS106)。
【0043】
具体的には、予備位置にある容器ピックアップ装置21を反応容器31の上側に退避させる方向に移動させたり、反応容器31の外形に沿った方向(つまり、YZ面内方向)に移動させることもできる。さらに、これらの軌道を組み合わせて、容器ピックアップ装置21を反応容器31から退避する方向に螺旋軌道を描きながら移動させてもよい。
【0044】
このように、予備位置から容器ピックアップ装置21を退避する方向に移動させることにより、予備位置と反応容器31との間隔が狭すぎて吸着に失敗した場合であっても、高い確率で反応容器31を吸着することができる。
【0045】
従来は、ピックアップの位置を予備試験などにより予め設定し、吸引圧などを観察しながら真空吸着の成否を1回判断し、そこで失敗すればそのワークのピックアップをあきらめ、隣のワークのピックアップを試みるというのが通常であった。
【0046】
これに対して、本実施形態の構成によれば、予備位置での吸着に失敗した場合には、推定領域で容器ピックアップ装置21を移動させることにより反応容器31を高い確率で吸着できるため、従来の自動分析装置よりもタイムロスを少なくすることができる。
【0047】
ステップS105で設定時間内に吸引圧が閾値を超えなかったと判別した場合には、ステップS107に進み、次の反応容器31の吸着を行う。
(他の実施例)
上述の実施形態では、ステップS105において容器ピックアップ装置21を推定領域内で移動させるかどうかの判別を設定時間をカウントすることにより行ったが、設定回数をカウントすることにより行ってもよい。例えば、設定回数を5回に設定し、各吸引位置にて0.075秒間吸引動作を行って吸着できなかった場合に、ピックアップの失敗と判別することができる。
【0048】
また、ステップS103において、吸引圧が閾値を超えたかどうかで吸着の有無を判別したが、他の方法を用いることもできる。例えば、容器ストレージラック3に反応容器31の位置を検出する位置センサ(フォトダイオードなど)を配置して、この位置センサから出力される位置情報に基づき、吸着の有無を判断してもよい。
【0049】
上述の容器ピックアップ装置21は、反応容器31以外の他のワークを搬送するために用いることもできる。また、上述の容器ピックアップ装置21を用いて、ワークを横から吸着することもできる。
【0050】
吸着部21bに反応容器31が吸着されることにより生じる衝撃力を緩和するための緩衝手段(例えば、弾性部材)を設けてもよい。
【図面の簡単な説明】
【0051】
【図1】自動分析装置の平面図である(反応容器の吸着前)。
【図2】自動分析装置の平面図である(反応容器の吸着時)。
【図3】ピップアップ装置の断面図である。
【図4】ピックアップ装置の動作制御を行うためのブロック図である。
【図5】容器ピックアップ装置の動作説明図である。
【図6】容器ピックアップ装置の動作方法を示すフローチャートである。
【符号の説明】
【0052】
3 容器ストレージラック
11 ピックアップ装置
12 搬送アーム
16 搬送レーン
16a 容器載置予定位置
21 容器ピックアップ装置
21a 吸引パイプ
21b 吸着部
21c 容器捕捉アーム
21e 吸着パット
21d アーム回転軸
22 チップピックアップ装置
31 反応容器
51 CPU
52 搬送アーム駆動モータユニット
53 ピックアップ装置搬送モータユニット
54 負圧源
55 圧力センサ
【特許請求の範囲】
【請求項1】
負圧によりワークを吸着する吸着ヘッドの駆動方法であって、
ワークに対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に前記吸着ヘッドを配置した状態で、前記吸着ヘッドに負圧を加える第1のステップと、
該第1のステップにおいて前記吸着ヘッドにより前記ワークを吸着できなかった場合には、前記吸着ヘッドに負圧を加えた状態で、前記吸引推定領域において前記吸着ヘッドを移動させる第2のステップと、を有することを特徴とする吸着ヘッドの駆動方法。
【請求項2】
前記第2のステップにおいて、予め設定された設定時間又は設定回数のもとに前記予備位置においてワークを吸着し得るとされる吸引圧が得られなかった場合には、前記吸引推定領域で前記吸着ヘッドを移動させることを特徴とする吸着ヘッドの駆動方法。
【請求項3】
前記第2のステップにおいて、前記吸着ヘッドを前記ワークから退避する方向に移動させることを特徴とする請求項1又は2に記載の吸着ヘッドの駆動方法。
【請求項4】
前記第2のステップにおいて、前記吸着ヘッドを前記ワークの外形に沿った方向に移動させることを特徴とする請求項1又は2に記載の吸着ヘッドの駆動方法。
【請求項5】
前記予備位置は、前記ワークから離間した位置に設定したことを特徴とする請求項1乃至4のうちいずれか一つに記載の吸着ヘッドの駆動方法。
【請求項1】
負圧によりワークを吸着する吸着ヘッドの駆動方法であって、
ワークに対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に前記吸着ヘッドを配置した状態で、前記吸着ヘッドに負圧を加える第1のステップと、
該第1のステップにおいて前記吸着ヘッドにより前記ワークを吸着できなかった場合には、前記吸着ヘッドに負圧を加えた状態で、前記吸引推定領域において前記吸着ヘッドを移動させる第2のステップと、を有することを特徴とする吸着ヘッドの駆動方法。
【請求項2】
前記第2のステップにおいて、予め設定された設定時間又は設定回数のもとに前記予備位置においてワークを吸着し得るとされる吸引圧が得られなかった場合には、前記吸引推定領域で前記吸着ヘッドを移動させることを特徴とする吸着ヘッドの駆動方法。
【請求項3】
前記第2のステップにおいて、前記吸着ヘッドを前記ワークから退避する方向に移動させることを特徴とする請求項1又は2に記載の吸着ヘッドの駆動方法。
【請求項4】
前記第2のステップにおいて、前記吸着ヘッドを前記ワークの外形に沿った方向に移動させることを特徴とする請求項1又は2に記載の吸着ヘッドの駆動方法。
【請求項5】
前記予備位置は、前記ワークから離間した位置に設定したことを特徴とする請求項1乃至4のうちいずれか一つに記載の吸着ヘッドの駆動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−78316(P2009−78316A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−248264(P2007−248264)
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000003300)東ソー株式会社 (1,901)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000003300)東ソー株式会社 (1,901)
【Fターム(参考)】
[ Back to top ]