
周波数検出装置及び周波数検出方法
【課題】無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減する。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書で論じられる実施態様は、無線信号の搬送周波数を検出する周波数検出装置及び周波数検出方法に関する。
【背景技術】
【0002】
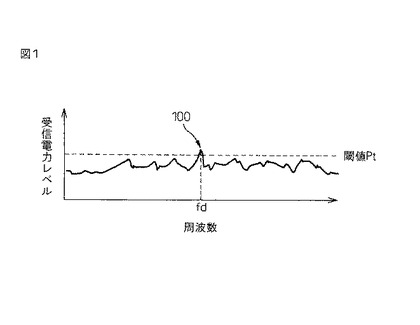
無線信号の搬送周波数を検出する方法として、検波対象の搬送周波数を掃引し、各搬送周波数において信号があるか否かを判定する方法が知られている。図1を参照して搬送周波数の検出方法を説明する。
【0003】
図1は、検波対象の搬送周波数が掃引される間に、各搬送周波数において検出される信号の受信電力レベルを示す。参照符号100にて示すように、周波数fdにおいて受信電力レベルが閾値Ptを超える。このとき、閾値Ptを超える受信電力レベルが観察された周波数fdが検出対象の搬送周波数として検出される。
【0004】
なお、搬送波に対して周波数変調幅ΔFの三角波変調を掛けた信号を送信アンテナから電磁波として放射し、送信信号と受信信号とのビート信号を生成するレーダ装置が知られている。このレーダ装置は、サンプリングされたビート信号を短時間データに切り出して、短時間データを離散フーリエ変換し、干渉波の周波数を検出する。
【0005】
また、漸減端周波数から漸増端周波数まで予め定められた漸増期間で漸増し、漸増端周波数まで漸増すると、次に、漸増端周波数から漸減端周波数まで予め定められた漸減期間で漸減するように変調される送信信号を送信するレーダ装置が知られている。このレーダ装置は、送信信号と反射信号とを混合部で混合したビート信号を逐次サンプリングして取得する。レーダ装置は、取得したビート信号に基づき、ビート信号に干渉信号が含まれる干渉期間を特定する。レーダ装置は、特定した干渉期間を除く期間で取得したビート信号に対してFFT処理をした結果に基づき、対象物との相対距離及び相対速度を測定する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−232383号公報
【特許文献2】特開2010−107219号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
検波周波数を掃引する従来の搬送周波数の検出方法では、瞬時的な雑音や不要波成分が受信信号に混入すると、信号が存在しない周波数において受信電力レベルが閾値を超え、誤検出が生じるという問題があった。
【0008】
開示の装置及び方法は、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減することを目的とする。
【課題を解決するための手段】
【0009】
装置の一観点によれば、パルス信号を送信する送信部と、信号を受信する受信部と、送信部により送信され物体で反射して受信部により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部を備える周波数検出装置が提供される。
【0010】
方法の一観点によれば、パルス信号を送信し、物体で反射したパルス信号を受信し、受信されるパルス信号を追跡することにより送信から受信までのパルス信号の反射時間を検出し、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定することを特徴とする周波数検出方法が提供される。
【発明の効果】
【0011】
開示の装置又は方法によれば、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出が低減される。
【図面の簡単な説明】
【0012】
【図1】搬送周波数の検出方法の説明図である。
【図2】周波数検出装置の構成例の第1例を示す図である。
【図3】距離測定の対象の物体の一例を示す図である。
【図4】(A)〜(C)は、パルス信号の追跡処理の一例の説明図(その1)である。
【図5】(A)〜(F)は、パルス信号の追跡処理の一例の説明図(その2)である。
【図6】反射時間検出部の構成例を示す図である。
【図7】(A)〜(F)は、測定値の変動の説明図である。
【図8】周波数検出方法の第1例の説明図である。
【図9】周波数検出装置の構成例の第2例を示す図である。
【図10】周波数検出方法の第2例の説明図である。
【図11】周波数検出装置の構成例の第3例を示す図である。
【発明を実施するための形態】
【0013】
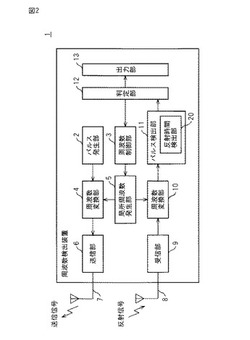
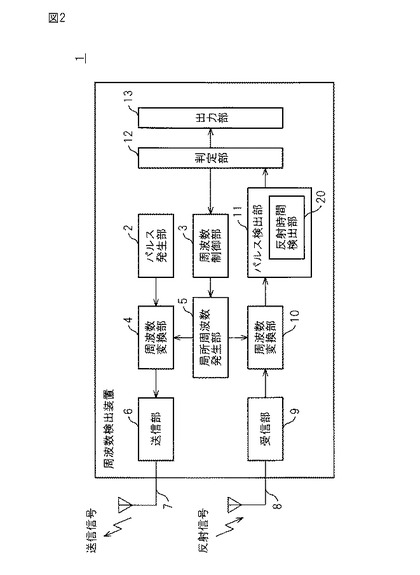
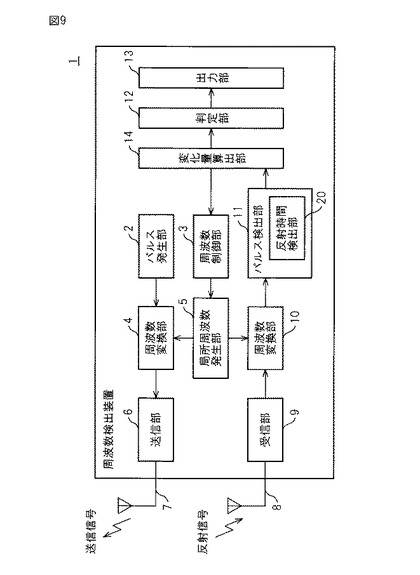
以下、添付する図面を参照して実施例について説明する。図2は、周波数検出装置の構成例の第1例を示す図である。
【0014】
周波数検出装置1は、パルス発生部2、周波数制御部3、周波数変換部4及び10、局所周波数発生部5、送信部6並びに送信アンテナ7を備える。また、周波数検出装置1は、受信アンテナ8、受信部9、パルス検出部11、判定部12及び出力部13を備える。周波数検出装置1は、同じアンテナを送信アンテナ7及び受信アンテナ8として兼用してもよい。
【0015】
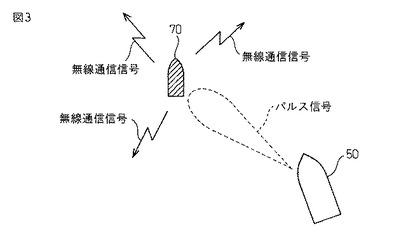
周波数検出装置1は、パルス信号を送信し、送信したパルスが物体から反射してくる反射時間を測定することにより物体までの距離を測定する。図3は、距離測定の対象の物体の一例を示す図である。
【0016】
以下の説明では、周波数検出装置1が船舶との距離を測定する場合について説明する。周波数検出装置1は、船舶50に設置され、船舶50の周囲にパルス信号を送信する。周波数検出装置1は、船舶70で反射するパルス信号の反射時間、すなわち周波数検出装置1の送信部6により送信されてから受信部9により受信されるまでの時間を測定することにより、船舶50と船舶70との間の距離を測定する。
【0017】
また、周波数検出装置1は、周波数検出装置1へ到来する無線通信信号の搬送周波数を検出する。本明細書において、検出対象の無線通信信号を「到来信号」と表記することがある。到来信号の発信源は、距離測定の対象である船舶70でもよく他の物体でもよい。
【0018】
なお、本説明では、周波数検出装置1との間の距離が測定される物体として船舶が例示されるが、距離の測定対象の物体は船舶に限定されない。周波数検出装置1との距離が測定される物体は、車両、航空機など他のいかなる種類の物体であってもよい。
【0019】
また、本説明では、到来信号の発信源として船舶が例示されるが、到来信号の発信源は船舶に限定されない。周波数検出装置1が検出しようとする到来信号の発信源は、上記例示したものの他、無線信号を送信可能な他のいかなる物体でもよい。
【0020】
図2を参照する。パルス発生部2は、中間周波数の搬送波をパルス変調することによりパルス波形を生成する。周波数制御部3は、送信部6が送信するパルス信号の搬送周波数を変化させるタイミング信号とパルス信号の搬送周波数を指定する周波数情報を生成する。周波数制御部3は、タイミング信号及び周波数情報を局所周波数発生部5へ出力する。
【0021】
周波数変換部4は、パルス発生部2が出力するパルス波形と局所周波数発生部5から供給される局発信号とを混合することにより、中間周波数のパルス波形を無線周波数のパルス信号へと変換する。
【0022】
局所周波数発生部5は、周波数制御部3からのタイミング信号及び周波数情報に従って、周波数変換部4及び周波数変換部10へ供給する周波数変換用の局発信号を生成する。周波数制御部3が、周波数情報の値を変えることによって、局発信号の周波数が変化し、周波数変換部4から出力される無線周波数のパルス信号の搬送周波数が変化する。
【0023】
送信部6は、周波数変換部4から出力される無線周波数のパルス信号の電力を増幅し、増幅されたパルス信号を、送信アンテナ7を介して送信する。
【0024】
受信部9は、受信アンテナ8を介して無線周波数のパルス信号を受信する。受信部9は、高周波増幅を行うことにより受信信号の電力を増幅する。周波数変換部10は、無線周波数の受信信号を中間周波数信号へ変換する。
【0025】
パルス検出部11は、受信信号に含まれるパルス信号を追跡する。このパルス信号は、送信部6により送信され特定の物体、例えば船舶70から反射したパルス信号である。パルス検出部11は、送信部6がパルス信号を送信した時点から、受信部9がパルス信号を受信するまでの反射時間に基づいて、船舶70と船舶50との距離を検出する。
【0026】
パルス検出部11は、反射時間検出部20を備える。反射時間検出部20は、例えば、スプリットゲート方式や相互相関法などの所定の距離追跡処理に従ってパルス信号の追跡処理を行う。反射時間検出部20は、検出部の一例である。反射時間検出部20の構成及び機能の例示については後述する。
【0027】
判定部12は、周波数制御部3に対して、パルス信号の搬送周波数を変化させる指示信号を与える。判定部12は、周波数制御部3が送信パルス信号の搬送周波数を変化させる間、パルス検出部11により測定されるパルス信号の反射時間の測定値を受信する。
【0028】
判定部12は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、パルス信号の反射時間が所定範囲内であるか否かを判定する。判定部12は、反射時間が所定範囲内でない場合に、パルス信号の搬送周波数を、検出対象である到来信号の搬送周波数と判定する。
【0029】
例えば、パルス検出部11は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、複数回送信され各々船舶70で反射する同一搬送周波数のパルス信号の反射時間を検出してよい。判定部12は、複数回検出された反射時間の測定値に生じた変動が所定の閾値を超える場合に、このような変動が生じた搬送周波数を到来信号の搬送周波数と判定してよい。
【0030】
出力部13は、判定部12により判定された到来信号の搬送周波数を出力する。出力部13は、ユーザが視覚で認識できるように搬送周波数を出力する表示装置や印刷装置であってよい。出力部13は、コンピュータにより読み取り可能な態様で搬送周波数を出力するインタフェース装置であってもよい。
【0031】
次に、反射時間検出部20によるパルス信号の追跡処理について説明する。図4の(A)〜図4の(C)及び図5の(A)〜図5の(F)は、パルス信号の追跡処理の一例の説明図である。
【0032】
パルス信号の追跡処理は、送信部6によりパルス信号が送信されてから、物体で反射して受信部9によりパルス信号の反射波を受信するまでの時間の測定を複数回行うものである。例えば、まず、送信部6からパルス信号を繰り返し送信し、受信部9で反射パルス信号の受信が受信されるのを待つ。受信部9で反射パルス信号が受信された後は、受信部9で反射パルス信号を繰り返し受信し、送信部6によりパルス信号が送信されてから、物体で反射して受信部9によりパルス信号の反射波を受信するまでの時間の測定を繰り返し行う。以下に説明する例において、反射時間検出部20は、スプリットゲート方式にしたがってパルス信号の追跡処理を行う。
【0033】
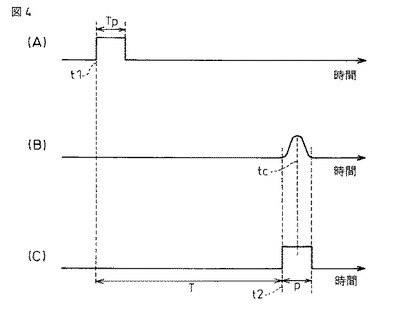
図4の(A)は、時刻t1で送信されたパルス幅Tpを有する送信パルス信号のタイムチャートを示す。図4の(B)は、船舶70で反射して受信部9にて受信されたパルス信号のビデオ信号のタイムチャートを示す。スプリットゲート方式では、反射時間検出部20は、パルス信号の反射時間を決定するためのメインレンジゲートを発生させる。
【0034】
図4の(C)にメインレンジゲートのタイムチャートを示す。メインレンジゲートは、反射パルス信号のビデオ信号の検出期間pを持つフィルタである。検出期間pは、パルス幅Tpと同じかそれよりやや長い。
【0035】
反射時間検出部20は、時間軸上で反射パルス信号を測定し、測定された反射パルス信号の時間軸上の位置とメインレンジゲートの時間軸上の位置を合わせる。図4の(C)においては、例えば最初に受信した反射パルス信号のビデオ信号の中心tcにメインゲートの中心が合わされた状態が示されている。
【0036】
反射時間検出部20は、パルス信号の受信時刻とメインレンジゲートの位置とのずれ、すなわち追跡誤差が生じると、誤差の方向及び誤差量を検出し、追跡誤差を縮小するようにメインレンジゲートの位置を変更することで、パルス信号を追跡する。反射時間検出部20は、このようにメインレンジゲートにパルス信号を追跡させ、パルスの送信時刻t1からメインレンジゲートの位置t2までの時刻をパルス信号の反射時間として決定する。
【0037】
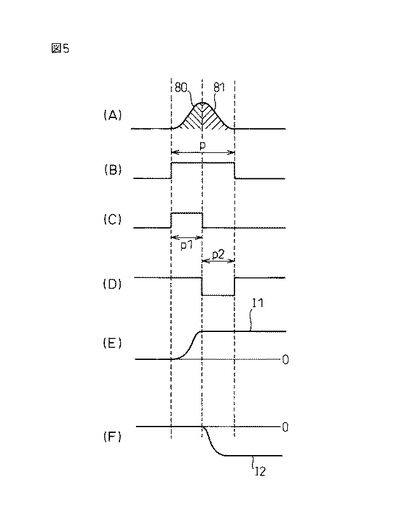
次に、追跡誤差の検出方法の例を説明する。図5の(A)はパルス信号のビデオ信号のタイムチャートを示し、図5の(B)はメインレンジゲートのタイムチャートを示す。また、図5の(C)はアーリーゲートのタイムチャートを示し、図5の(D)はレイトゲートのタイムチャートを示す。アーリーゲートは、メインレンジゲートの前半の期間p1にて開き、レイトゲートは、メインレンジゲートの後半の期間p2にて開く。
【0038】
図5の(E)は、アーリーゲートが開く期間p1において積分したビデオ信号の積分値を示す。期間p1経過後の積分値の値を「I1」と表記する。図5の(F)は、レイトゲートが開く期間p2においてビデオ信号の正負反転信号を積分した積分値を示す。期間p2経過後の積分値の値を「I2」と表記する。
【0039】
ビデオ信号とメインレンジゲートの位置ずれがない場合、追跡誤差(I1−I2)は「0」になる。一方で、メインレンジゲートがビデオ信号よりも遅れると追跡誤差(I1−I2)は正の値となり、メインレンジゲートがビデオ信号より先行すると追跡誤差(I1−I2)は負の値となる。このようにして、メインレンジゲートとビデオ信号の位置ずれ量によって追跡誤差の符号及び大きさが変化する。
【0040】
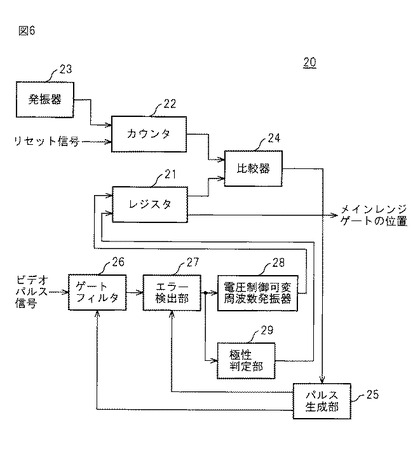
図6は、反射時間検出部20の構成例を示す図である。反射時間検出部20は、レジスタ21と、カウンタ22と、発振器23と、比較器24と、パルス生成部25と、ゲートフィルタ26と、エラー検出部27と、電圧制御可変発振器28と、極性判定部29を備える。
【0041】
レジスタ21は、メインレンジゲートの時間軸上の位置、例えばパルス信号の送信時刻からメインレンジゲートの開始時刻までの時間を記憶する。カウンタ22は、発振器23からの出力信号をカウントする。カウンタ22のカウント値は、パルス信号の送信時刻に生じるリセット信号によってリセットされる。
【0042】
比較器24は、レジスタ21が記憶するメインレンジゲートの位置と、カウンタ22のカウント値とを比較する。比較器24は、比較結果信号をパルス生成部25へ出力する。パルス生成部25は、比較結果信号に基づいてメインレンジゲート、アーリーゲート及びレイトゲートの開始タイミングパルス信号を生成する。
【0043】
ゲートフィルタ26は、パルス生成部25が生成するタイミングパルス信号によって開始されるメインレンジゲートの期間pにおいてパルス信号のビデオ信号を通過させる。エラー検出部27は、パルス生成部25が生成するタイミングパルス信号によって開始されるアーリーゲート及びレイトゲートの位置が開く期間に従って、受信されるビデオ信号に応じて追跡誤差を検出する。
【0044】
極性判定部29は、追跡誤差の値の符号を検出することにより、追跡誤差の極性を判定する。電圧制御可変発振器28は、極性判定部29により判定された極性と、追跡誤差の大きさに従ってレジスタ21の値を増減することにより、追跡誤差を縮小するようにメインレンジゲートの位置を変更する。反射時間検出部20は、反射時間を示す信号として、レジスタ21に記憶されるメインレンジゲートの位置を出力する。
なお、他の実施例では、反射時間検出部20によるパルス信号の追跡処理は他の方式で行われてもよい。例えば、送信部6によるパルス信号の送信から受信部9による反射パルス信号の受信までの時間と、所定の時間毎に番号を付した時間軸上のメモリセルとを比較し、反射パルス信号に対応するメモリセルの番号を検出することを複数回行うことで、パルス信号の追跡処理を行われてもよい(相互相関法)。
【0045】
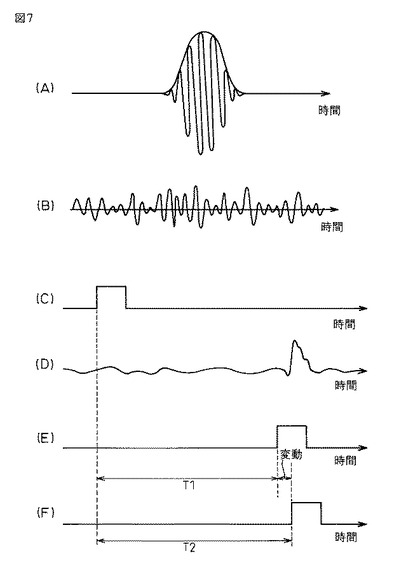
続いて、到来信号により生じる反射時間の測定値の変動(バラツキ)について説明する。図7の(A)〜図7の(F)は、測定値の変動の説明図である。
【0046】
船舶50へ到来する到来信号の搬送周波数と、船舶70にて反射して船舶50へ戻るパルス信号の搬送周波数が同じ場合、反射したパルス信号と到来信号とが混信する。図7の(A)は、船舶70にて反射し受信部9にて受信されたパルス信号の例を示し、図7の(B)は到来信号の例を示す。図7の(A)に示す本来のパルス信号に対して図7の(B)に示すような到来信号が混信すると、パルス信号の包絡線、すなわちパルス信号のビデオ信号に乱れが生じる。
【0047】
図7の(C)は送信パルス信号のタイムチャートを示し、図7の(D)は船舶70で反射し且つ到来信号が混信にしたパルス信号のビデオ信号のタイムチャートを示す。図7の(A)にて示す波形と比較して、図7の(D)はビデオ信号の波形が乱れた状態を示している。
【0048】
反射時間検出部20は、船舶70から反射するパルス信号のビデオ信号の波形に基づいてパルス信号の追跡処理を行う。ビデオ信号の波形の乱れは、反射時間検出部20による追跡処理に悪影響を与える。例えば、上記の反射時間検出部20の処理において、ビデオ信号の波形の乱れは、追跡誤差の値に狂いを生じさせる。
【0049】
検出対象の到来信号である無線通信信号は、瞬時的な雑音や不要波成分と比べて比較的長い時間継続する連続波である。したがって、パルス信号の搬送周波数が到来信号の搬送周波数に一致する場合、パルス信号と到来信号との混信によりビデオ信号の波形が継続的に乱れるため、反射時間検出部20の追跡処理により検出するパルス信号の位置が収束しなくなる。
【0050】
この結果、反射時間の測定値の変動が増大する。したがって、判定部12は、反射時間の測定値が所定範囲内でない場合には、測定時のパルス信号の送信周波数が、到来信号の搬送周波数である判定することができる。
【0051】
例えば、図7の(D)に示す位置のビデオ信号について複数回反射時間を検出する場合を考える。すると、ある測定ではメインレンジゲートの位置が図7の(E)に示す位置に位置づけられ、他の測定では波形の変動によってメインレンジゲートの位置が図7の(F)に示す位置に位置づけられる。
【0052】
すると、図7の(E)及び図7の(F)の各ゲートの位置がふらつく。この結果、測定値がT1からT2に変化し、測定値にT2−T1だけ変動が生じる。
【0053】
一方で、パルス信号に混信する電波が瞬時的な雑音や不要波成分である場合、混信電波がパルス信号の追跡に瞬時的に影響を与えても、反射時間検出部20の追跡処理により検出されるパルス信号の位置は収束する。このため、到来信号が混信する場合と比較すると、瞬時的な雑音や不要波成分による測定値の変動は小さい。したがって、瞬時的な雑音や不要波成分が混信しても、これらの電波の周波数が誤って検出する恐れが低減される。
【0054】
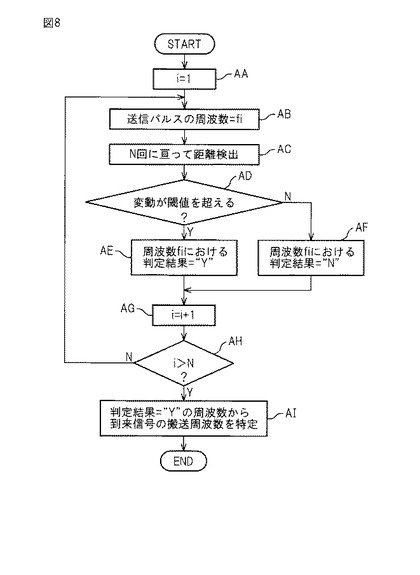
図8は、周波数検出方法の第1例の説明図である。なお、他の実施態様においては、下記のオペレーションAA〜AIの各オペレーションはステップであってもよい。
【0055】
オペレーションAAにおいて判定部12は、送信パルス信号の搬送周波数を変化させる指示信号を周波数制御部3に与える。周波数制御部3は、搬送周波数の変更回数を数えるための変数iの値を「1」に初期化する。
【0056】
オペレーションABにおいて周波数制御部3は、所定の第i番目の周波数fiを搬送周波数として指定する周波数情報を局所周波数発生部5へ出力する。周波数変換部4は、局所周波数発生部5から供給される局発信号によりパルス発生部2が出力するパルス波形を周波数変換することによって、搬送周波数fiのパルス信号を生成する。
【0057】
オペレーションACにおいて送信部6はパルス信号を送信する。反射時間検出部20は、反射パルス信号の反射時間を測定する。パルス信号の送信及び反射時間の測定はN回行われる。Nは例えば2以上の整数であってよい。
【0058】
オペレーションADにおいて判定部12は、測定値の変動が所定の閾値を超えるか否かを判定する。判定部12は、複数の値の間の変動について様々な算出方法を利用してよい。例えば判定部12は、測定値の最大値と最小値の差を変動として算出してよい。例えば判定部12は、測定値の標準偏差を変動として算出してよい。
【0059】
測定値の変動が所定の閾値を超える場合(オペレーションAD:Y)、処理はオペレーションAEに進む。測定値の変動が所定の閾値を超えない場合(オペレーションAD:N)、処理はオペレーションAFに進む。
【0060】
オペレーションAEにおいて判定部12は、判定結果「Y」を搬送周波数fiに関連付けて記憶することにより、周波数fiにおいて判定された変動が所定の閾値を超えたことを記憶する。その後、処理はオペレーションAGに進む。
【0061】
一方、オペレーションAFにおいて判定部12は、判定結果「N」を搬送周波数fiに関連付けて記憶することにより、周波数fiにおいて判定された変動が所定の閾値以内であったことを記憶する。その後、処理はオペレーションAGに進む。
【0062】
オペレーションAGにおいて周波数制御部3は、変数iの値を1つ増加させる。オペレーションAHにおいて周波数制御部3は、所定のN回の搬送周波数の変更が完了したか否かを判定する。N回の搬送周波数の変更が完了した場合(オペレーションAH:Y)、処理はオペレーションAIへ進む。N回の搬送周波数の変更が完了しない場合(オペレーションAH:N)、処理はオペレーションABへ戻る。
【0063】
オペレーションAIにおいて判定部12は、判定結果「Y」に関連付けられて記憶された搬送周波数fiを、到来信号の搬送周波数として特定する。その後処理は終了する。
【0064】
なお、図8に示す周波数検出方法では、判定部12は、周波数制御部3が(N−1)回変化させたN個の搬送周波数のそれぞれについて、到来信号の搬送周波数であるか否かを判定した。
【0065】
他の実施例では、周波数制御部3が第1ステップ幅で搬送周波数を(N−1)回変化させてよい。判定部12は、N個の搬送周波数のそれぞれについて到来信号の搬送周波数であるか否かを判定することにより到来信号の搬送周波数を粗検出してよい。
【0066】
N個の搬送周波数の中から到来信号の搬送周波数が発見されたとき、周波数制御部3は、N個の搬送周波数の中の、発見された周波数の前後の周波数間において、第1ステップ幅よりも狭い第2ステップ幅で搬送周波数を(M−1)回変化させてよい。判定部12は、M個の搬送周波数のそれぞれについて到来信号の搬送周波数であるか否かを判定することにより、到来信号の搬送周波数を細検出してよい。以下に示す他の実施例でも同様である。
【0067】
本実施例によれば、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出が低減される。これにより、無線信号の搬送周波数を特定する精度が向上する。
【0068】
また、上記の通り搬送周波数の粗検出と細検出とを行うことにより、無線信号の搬送周波数を特定する精度をさらに向上することが可能となる。
【0069】
次に周波数検出装置1の他の実施例について説明する。図9は、周波数検出装置1の構成例の第2例を示す図である。第2例の周波数検出装置1は、複数回測定した反射時間の測定値間の変化量を算出する。
【0070】
図3に示す船舶50と船舶70とが相対移動している場合、船舶50と船舶70との間の距離変化に応じて反射時間の測定値が変化する。この反射時間の測定値の変化率は、船舶50と船舶70との間の平均相対速度にも依存する。しかし、一定のインターバル毎に測定された測定値間の変化量を算出すると、算出された各変化量同士の大きさの差は、相対速度の変化によって変動するが、平均相対速度には依存しなくなる。
【0071】
したがって、第2例の周波数検出装置1は、測定値間の変化量の変動が閾値を超える場合に、パルス信号の搬送周波数を到来信号の搬送周波数と判定する。
【0072】
図9において、図2を参照して説明した第1構成例の各構成要素と同様の構成要素には同一の参照符号を付する。同一の参照符号が付された構成要素は特に説明しない限り同じである。また、以下に説明する第2構成例の構成要素やその機能を他の実施例が備えていてもよい。
【0073】
周波数検出装置1は、変化量算出部14を備える。変化量算出部14は、周波数制御部3に対して、パルス信号の搬送周波数を変化させる指示信号を与える。変化量算出部14は、送信パルス信号の搬送周波数を周波数制御部3が変化させる間、パルス検出部11により測定されるパルス信号の反射時間の測定値を受信する。
【0074】
パルス検出部11は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、複数回送信され各々船舶70で反射する同一搬送周波数のパルス信号の反射時間を検出する。変化量算出部14は、一定の測定周期でパルス検出部11により測定された反射時間の測定値間の変化量を算出する。
【0075】
次に示す表1は、同一搬送周波数のパルス信号の反射時間を複数回検出した場合における、検出した反射時間に基づき測定される船舶50及び船舶70間の距離の測定値の例である。
【0076】
【表1】

【0077】
表1は、到来信号の搬送周波数とパルス信号との混信がない場合の測定結果を示す。10回の測定の間のインターバルは略同じである。第1回目及び第2回目の測定値間の変化量Δdは9mであり、第2回目及び第3回目の測定値間の変化量Δdは9mであり、第3回目及び第4回目の測定値間の変化量Δdは11mである。
【0078】
第4回目及び第5回目の測定値間の変化量Δdは8mであり、第5回目及び第6回目の測定値間の変化量Δdは11mであり、第6回目及び第7回目の測定値間の変化量Δdは8mである。第7回目及び第8回目の測定値間の変化量Δdは9mであり、第8回目及び第9回目の測定値間の変化量Δdは9mであり、第9回目及び第10回目の測定値間の変化量Δdは9mである。
【0079】
なお、表1は、船舶50及び船舶70が接近している場合の測定結果を示す。測定間隔毎に約10mずつ船舶50と船舶70間との間の距離が変化している。変化量Δd間の差の最大値は3mである。
【0080】
次に示す表2は、到来信号とパルス信号が混信する場合の測定結果である。
【0081】
【表2】
【0082】
第1回目及び第2回目の測定値間の変化量Δdは297mであり、第2回目及び第3回目の測定値間の変化量Δdは243mであり、第3回目及び第4回目の測定値間の変化量Δdは193mである。第4回目及び第5回目の測定値間の変化量Δdは122mであり、第5回目及び第6回目の測定値間の変化量Δdは188mであり、第6回目及び第7回目の測定値間の変化量Δdは228mである。第7回目及び第8回目の測定値間の変化量Δdは278mであり、第8回目及び第9回目の測定値間の変化量Δdは256mであり、第9回目及び第10回目の測定値間の変化量Δdは214mである。
【0083】
本測定結果の例は、船舶50及び船舶70が接近している場合の測定結果を示す。測定間隔毎に約10mずつ船舶50と船舶70との間の距離が変化している。変化量Δd間の差の最大値は175mである。
【0084】
このように、測定値間の変化量の変動に注目すれば、船舶50と船舶70とが相対移動している場合に、測定値間の変化量の変動の大きさが、平均相対速度の違いに依存しなくなる。このため、到来信号が混信しないときの変動を小さく抑えることができる。
【0085】
一方で、表2に示す通り到来信号が混信すると測定値間の変化量の変動は増加する。このように、測定値間の変化量の変動が所定の閾値を超えるか否かを判定することにより、平均相対速度の大きさに関わらず、到来信号の混信の検出感度を維持することができる。
【0086】
図9を参照する。判定部12は、変化量算出部14は算出する変化量を受信する。測定値間の変化量の変動が閾値を超える場合に、このような変動が生じた搬送周波数を到来信号の搬送周波数と判定する。
【0087】
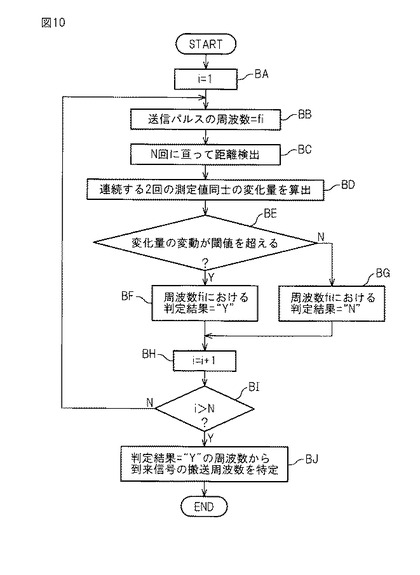
以下、第2例の周波数検出装置1によって行われる周波数検出方法を説明する。図10は、周波数検出方法の第2例の説明図である。なお、他の実施態様においては、下記のオペレーションBA〜BJの各オペレーションはステップであってもよい。
【0088】
オペレーションBAにおいて変化量算出部14は、送信パルス信号の搬送周波数を変化させる指示信号を周波数制御部3に与える。周波数制御部3は、搬送周波数の変更回数を数えるための変数iの値を「1」に初期化する。
【0089】
オペレーションBB及びBCの処理は、図8に示すオペレーションAB及びACの処理と同様である。オペレーションBDにおいて変化量算出部14は、一定の測定周期でパルス検出部11により測定された反射時間の測定値間の変化量を算出する。
【0090】
オペレーションBEにおいて判定部12は、変化量の変動が所定の閾値を超えるか否かを判定する。変動が所定の閾値を超える場合(オペレーションBE:Y)、処理はオペレーションBFに進む。変動が所定の閾値を超えない場合(オペレーションBE:N)、処理はオペレーションBGに進む。
【0091】
オペレーションBF〜GJの処理は、図8に示すオペレーションAE〜AIの処理と同様である。
【0092】
本実施例によれば、反射時間の変動の大きさを判定する際に、船舶50及び船舶70の相対移動による平均相対速度の違いを変動から除去することができる。これにより、船舶50及び船舶70の相対移動に関わらず、無線信号の搬送周波数の検出精度を維持することができる。
【0093】
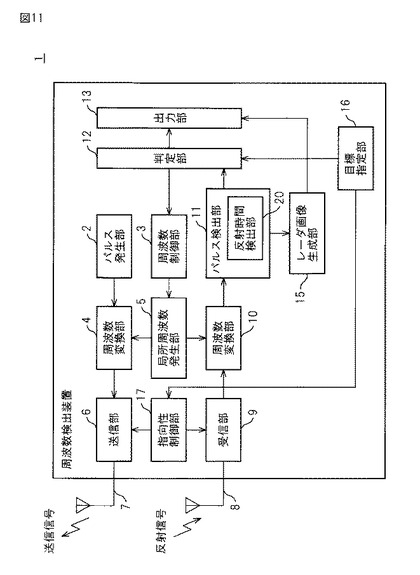
次に周波数検出装置1の他の実施例について説明する。図11は、周波数検出装置1の構成例の第3例を示す図である。第3例の周波数検出装置1は、パルス信号を反射する物体の指定をユーザが行うことを可能にする。判定部12は、ユーザにより指定された物体で反射したパルス信号の反射時間の測定値に生ずる変動に基づいて到来信号の搬送周波数を判定する。
【0094】
図11において、図2を参照して説明した第1構成例の各構成要素と同様の構成要素には同一の参照符号を付する。同一の参照符号が付された構成要素は特に説明しない限り同じである。
【0095】
周波数検出装置1は、レーダ画像作成部15と、目標指定部16と、指向性制御部17を備える。レーダ画像作成部15は、パルス検出部11によって検出された受信パルスに基づいて、船舶50の周囲においてパルス信号を反射した物体の像を示すレーダ画像を生成する。出力部13はレーダ画像を出力する。
【0096】
目標指定部16は、レーダ画像に現れた物体のいずれかをユーザが指定する指定入力を受け付ける。目標指定部16は、例えば出力部13が出力するレーダ画像上のいずれかの点を指定できる入力インタフェースであってよい。例えば目標指定部16は、タッチペン、タッチパネル、マウス及びトラックボールなどであってよい。
【0097】
目標指定部16は、指定された物体を識別する識別情報を生成する。識別情報は、レーダ画像上における物体の座標情報や、レーダ画像上で認識された物体に割り当てられる識別子であってよい。目標指定部16は、識別情報を判定部12へ出力する。また目標指定部16は、指定された物体が存在する位置を示す位置情報を指向性制御部17へ出力する。
【0098】
判定部12は、目標指定部16から受信する識別情報に従って、パルス検出部11から受信する反射時間の測定値のうち、ユーザにより指定された物体から反射したパルス信号に関するものを選択する。
【0099】
これに加えて又はこれに代えて、パルス検出部11は、目標指定部16から識別情報を受信し、ユーザにより指定された物体から反射したパルス信号の反射時間の測定値を選択して判定部12へ出力してもよい。また、パルス検出部11は、ユーザにより指定された物体から反射したパルス信号の反射時間の測定値を、他の測定値と区別できる形で判定部12へ出力してもよい。
【0100】
判定部12は、ユーザにより指定された物体で反射したパルス信号の反射時間の測定値に基づいて、到来信号の搬送周波数を判定する。
【0101】
また、指向性制御部17は、ユーザが指定する物体の位置情報を目標指定部16から受信したとき、送信アンテナ7及び/又は受信アンテナ8の指向性を、指定された物体が存在する方向へ向けてよい。なお、目標指定部16による指定に基づく送信アンテナ7及び/又は受信アンテナ8の指向性の制御を行わない場合には、指向性制御部17は省略してよい。
【0102】
本実施例によれば、到来信号の発信源の物体を、到来信号の搬送周波数を測定する際に使用するパルス信号の反射物体として指定することが可能となる。パルス信号の反射物体として発信源を指定することにより、反射したパルス信号の受信方向と、到来信号の受信方向とを合わせることができるので、反射パルスと到来信号とをより良く混信させることが可能となる。
【0103】
反射パルスと到来信号とがより良く混信することにより、反射時間の測定結果又はその変化量の変動を増大させることができるので、到来信号の搬送周波数の検出感度をより向上することができる。
【0104】
また、アンテナの指向性を、発信源に向けることにより、他の方向から飛来するノイズや不要波成分による影響を低減することが可能となる。また、アンテナ指向性を発信源に向けることにより、発信源に向けてパルス信号を送信できる期間が増えるため、検出に要する時間を短縮することができる。
【符号の説明】
【0105】
1 周波数測定装置
6 送信部
9 受信部
12 判定部
14 変化量算出部
16 目標指定部
17 指向性制御部
【技術分野】
【0001】
本明細書で論じられる実施態様は、無線信号の搬送周波数を検出する周波数検出装置及び周波数検出方法に関する。
【背景技術】
【0002】
無線信号の搬送周波数を検出する方法として、検波対象の搬送周波数を掃引し、各搬送周波数において信号があるか否かを判定する方法が知られている。図1を参照して搬送周波数の検出方法を説明する。
【0003】
図1は、検波対象の搬送周波数が掃引される間に、各搬送周波数において検出される信号の受信電力レベルを示す。参照符号100にて示すように、周波数fdにおいて受信電力レベルが閾値Ptを超える。このとき、閾値Ptを超える受信電力レベルが観察された周波数fdが検出対象の搬送周波数として検出される。
【0004】
なお、搬送波に対して周波数変調幅ΔFの三角波変調を掛けた信号を送信アンテナから電磁波として放射し、送信信号と受信信号とのビート信号を生成するレーダ装置が知られている。このレーダ装置は、サンプリングされたビート信号を短時間データに切り出して、短時間データを離散フーリエ変換し、干渉波の周波数を検出する。
【0005】
また、漸減端周波数から漸増端周波数まで予め定められた漸増期間で漸増し、漸増端周波数まで漸増すると、次に、漸増端周波数から漸減端周波数まで予め定められた漸減期間で漸減するように変調される送信信号を送信するレーダ装置が知られている。このレーダ装置は、送信信号と反射信号とを混合部で混合したビート信号を逐次サンプリングして取得する。レーダ装置は、取得したビート信号に基づき、ビート信号に干渉信号が含まれる干渉期間を特定する。レーダ装置は、特定した干渉期間を除く期間で取得したビート信号に対してFFT処理をした結果に基づき、対象物との相対距離及び相対速度を測定する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−232383号公報
【特許文献2】特開2010−107219号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
検波周波数を掃引する従来の搬送周波数の検出方法では、瞬時的な雑音や不要波成分が受信信号に混入すると、信号が存在しない周波数において受信電力レベルが閾値を超え、誤検出が生じるという問題があった。
【0008】
開示の装置及び方法は、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減することを目的とする。
【課題を解決するための手段】
【0009】
装置の一観点によれば、パルス信号を送信する送信部と、信号を受信する受信部と、送信部により送信され物体で反射して受信部により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部を備える周波数検出装置が提供される。
【0010】
方法の一観点によれば、パルス信号を送信し、物体で反射したパルス信号を受信し、受信されるパルス信号を追跡することにより送信から受信までのパルス信号の反射時間を検出し、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定することを特徴とする周波数検出方法が提供される。
【発明の効果】
【0011】
開示の装置又は方法によれば、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出が低減される。
【図面の簡単な説明】
【0012】
【図1】搬送周波数の検出方法の説明図である。
【図2】周波数検出装置の構成例の第1例を示す図である。
【図3】距離測定の対象の物体の一例を示す図である。
【図4】(A)〜(C)は、パルス信号の追跡処理の一例の説明図(その1)である。
【図5】(A)〜(F)は、パルス信号の追跡処理の一例の説明図(その2)である。
【図6】反射時間検出部の構成例を示す図である。
【図7】(A)〜(F)は、測定値の変動の説明図である。
【図8】周波数検出方法の第1例の説明図である。
【図9】周波数検出装置の構成例の第2例を示す図である。
【図10】周波数検出方法の第2例の説明図である。
【図11】周波数検出装置の構成例の第3例を示す図である。
【発明を実施するための形態】
【0013】
以下、添付する図面を参照して実施例について説明する。図2は、周波数検出装置の構成例の第1例を示す図である。
【0014】
周波数検出装置1は、パルス発生部2、周波数制御部3、周波数変換部4及び10、局所周波数発生部5、送信部6並びに送信アンテナ7を備える。また、周波数検出装置1は、受信アンテナ8、受信部9、パルス検出部11、判定部12及び出力部13を備える。周波数検出装置1は、同じアンテナを送信アンテナ7及び受信アンテナ8として兼用してもよい。
【0015】
周波数検出装置1は、パルス信号を送信し、送信したパルスが物体から反射してくる反射時間を測定することにより物体までの距離を測定する。図3は、距離測定の対象の物体の一例を示す図である。
【0016】
以下の説明では、周波数検出装置1が船舶との距離を測定する場合について説明する。周波数検出装置1は、船舶50に設置され、船舶50の周囲にパルス信号を送信する。周波数検出装置1は、船舶70で反射するパルス信号の反射時間、すなわち周波数検出装置1の送信部6により送信されてから受信部9により受信されるまでの時間を測定することにより、船舶50と船舶70との間の距離を測定する。
【0017】
また、周波数検出装置1は、周波数検出装置1へ到来する無線通信信号の搬送周波数を検出する。本明細書において、検出対象の無線通信信号を「到来信号」と表記することがある。到来信号の発信源は、距離測定の対象である船舶70でもよく他の物体でもよい。
【0018】
なお、本説明では、周波数検出装置1との間の距離が測定される物体として船舶が例示されるが、距離の測定対象の物体は船舶に限定されない。周波数検出装置1との距離が測定される物体は、車両、航空機など他のいかなる種類の物体であってもよい。
【0019】
また、本説明では、到来信号の発信源として船舶が例示されるが、到来信号の発信源は船舶に限定されない。周波数検出装置1が検出しようとする到来信号の発信源は、上記例示したものの他、無線信号を送信可能な他のいかなる物体でもよい。
【0020】
図2を参照する。パルス発生部2は、中間周波数の搬送波をパルス変調することによりパルス波形を生成する。周波数制御部3は、送信部6が送信するパルス信号の搬送周波数を変化させるタイミング信号とパルス信号の搬送周波数を指定する周波数情報を生成する。周波数制御部3は、タイミング信号及び周波数情報を局所周波数発生部5へ出力する。
【0021】
周波数変換部4は、パルス発生部2が出力するパルス波形と局所周波数発生部5から供給される局発信号とを混合することにより、中間周波数のパルス波形を無線周波数のパルス信号へと変換する。
【0022】
局所周波数発生部5は、周波数制御部3からのタイミング信号及び周波数情報に従って、周波数変換部4及び周波数変換部10へ供給する周波数変換用の局発信号を生成する。周波数制御部3が、周波数情報の値を変えることによって、局発信号の周波数が変化し、周波数変換部4から出力される無線周波数のパルス信号の搬送周波数が変化する。
【0023】
送信部6は、周波数変換部4から出力される無線周波数のパルス信号の電力を増幅し、増幅されたパルス信号を、送信アンテナ7を介して送信する。
【0024】
受信部9は、受信アンテナ8を介して無線周波数のパルス信号を受信する。受信部9は、高周波増幅を行うことにより受信信号の電力を増幅する。周波数変換部10は、無線周波数の受信信号を中間周波数信号へ変換する。
【0025】
パルス検出部11は、受信信号に含まれるパルス信号を追跡する。このパルス信号は、送信部6により送信され特定の物体、例えば船舶70から反射したパルス信号である。パルス検出部11は、送信部6がパルス信号を送信した時点から、受信部9がパルス信号を受信するまでの反射時間に基づいて、船舶70と船舶50との距離を検出する。
【0026】
パルス検出部11は、反射時間検出部20を備える。反射時間検出部20は、例えば、スプリットゲート方式や相互相関法などの所定の距離追跡処理に従ってパルス信号の追跡処理を行う。反射時間検出部20は、検出部の一例である。反射時間検出部20の構成及び機能の例示については後述する。
【0027】
判定部12は、周波数制御部3に対して、パルス信号の搬送周波数を変化させる指示信号を与える。判定部12は、周波数制御部3が送信パルス信号の搬送周波数を変化させる間、パルス検出部11により測定されるパルス信号の反射時間の測定値を受信する。
【0028】
判定部12は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、パルス信号の反射時間が所定範囲内であるか否かを判定する。判定部12は、反射時間が所定範囲内でない場合に、パルス信号の搬送周波数を、検出対象である到来信号の搬送周波数と判定する。
【0029】
例えば、パルス検出部11は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、複数回送信され各々船舶70で反射する同一搬送周波数のパルス信号の反射時間を検出してよい。判定部12は、複数回検出された反射時間の測定値に生じた変動が所定の閾値を超える場合に、このような変動が生じた搬送周波数を到来信号の搬送周波数と判定してよい。
【0030】
出力部13は、判定部12により判定された到来信号の搬送周波数を出力する。出力部13は、ユーザが視覚で認識できるように搬送周波数を出力する表示装置や印刷装置であってよい。出力部13は、コンピュータにより読み取り可能な態様で搬送周波数を出力するインタフェース装置であってもよい。
【0031】
次に、反射時間検出部20によるパルス信号の追跡処理について説明する。図4の(A)〜図4の(C)及び図5の(A)〜図5の(F)は、パルス信号の追跡処理の一例の説明図である。
【0032】
パルス信号の追跡処理は、送信部6によりパルス信号が送信されてから、物体で反射して受信部9によりパルス信号の反射波を受信するまでの時間の測定を複数回行うものである。例えば、まず、送信部6からパルス信号を繰り返し送信し、受信部9で反射パルス信号の受信が受信されるのを待つ。受信部9で反射パルス信号が受信された後は、受信部9で反射パルス信号を繰り返し受信し、送信部6によりパルス信号が送信されてから、物体で反射して受信部9によりパルス信号の反射波を受信するまでの時間の測定を繰り返し行う。以下に説明する例において、反射時間検出部20は、スプリットゲート方式にしたがってパルス信号の追跡処理を行う。
【0033】
図4の(A)は、時刻t1で送信されたパルス幅Tpを有する送信パルス信号のタイムチャートを示す。図4の(B)は、船舶70で反射して受信部9にて受信されたパルス信号のビデオ信号のタイムチャートを示す。スプリットゲート方式では、反射時間検出部20は、パルス信号の反射時間を決定するためのメインレンジゲートを発生させる。
【0034】
図4の(C)にメインレンジゲートのタイムチャートを示す。メインレンジゲートは、反射パルス信号のビデオ信号の検出期間pを持つフィルタである。検出期間pは、パルス幅Tpと同じかそれよりやや長い。
【0035】
反射時間検出部20は、時間軸上で反射パルス信号を測定し、測定された反射パルス信号の時間軸上の位置とメインレンジゲートの時間軸上の位置を合わせる。図4の(C)においては、例えば最初に受信した反射パルス信号のビデオ信号の中心tcにメインゲートの中心が合わされた状態が示されている。
【0036】
反射時間検出部20は、パルス信号の受信時刻とメインレンジゲートの位置とのずれ、すなわち追跡誤差が生じると、誤差の方向及び誤差量を検出し、追跡誤差を縮小するようにメインレンジゲートの位置を変更することで、パルス信号を追跡する。反射時間検出部20は、このようにメインレンジゲートにパルス信号を追跡させ、パルスの送信時刻t1からメインレンジゲートの位置t2までの時刻をパルス信号の反射時間として決定する。
【0037】
次に、追跡誤差の検出方法の例を説明する。図5の(A)はパルス信号のビデオ信号のタイムチャートを示し、図5の(B)はメインレンジゲートのタイムチャートを示す。また、図5の(C)はアーリーゲートのタイムチャートを示し、図5の(D)はレイトゲートのタイムチャートを示す。アーリーゲートは、メインレンジゲートの前半の期間p1にて開き、レイトゲートは、メインレンジゲートの後半の期間p2にて開く。
【0038】
図5の(E)は、アーリーゲートが開く期間p1において積分したビデオ信号の積分値を示す。期間p1経過後の積分値の値を「I1」と表記する。図5の(F)は、レイトゲートが開く期間p2においてビデオ信号の正負反転信号を積分した積分値を示す。期間p2経過後の積分値の値を「I2」と表記する。
【0039】
ビデオ信号とメインレンジゲートの位置ずれがない場合、追跡誤差(I1−I2)は「0」になる。一方で、メインレンジゲートがビデオ信号よりも遅れると追跡誤差(I1−I2)は正の値となり、メインレンジゲートがビデオ信号より先行すると追跡誤差(I1−I2)は負の値となる。このようにして、メインレンジゲートとビデオ信号の位置ずれ量によって追跡誤差の符号及び大きさが変化する。
【0040】
図6は、反射時間検出部20の構成例を示す図である。反射時間検出部20は、レジスタ21と、カウンタ22と、発振器23と、比較器24と、パルス生成部25と、ゲートフィルタ26と、エラー検出部27と、電圧制御可変発振器28と、極性判定部29を備える。
【0041】
レジスタ21は、メインレンジゲートの時間軸上の位置、例えばパルス信号の送信時刻からメインレンジゲートの開始時刻までの時間を記憶する。カウンタ22は、発振器23からの出力信号をカウントする。カウンタ22のカウント値は、パルス信号の送信時刻に生じるリセット信号によってリセットされる。
【0042】
比較器24は、レジスタ21が記憶するメインレンジゲートの位置と、カウンタ22のカウント値とを比較する。比較器24は、比較結果信号をパルス生成部25へ出力する。パルス生成部25は、比較結果信号に基づいてメインレンジゲート、アーリーゲート及びレイトゲートの開始タイミングパルス信号を生成する。
【0043】
ゲートフィルタ26は、パルス生成部25が生成するタイミングパルス信号によって開始されるメインレンジゲートの期間pにおいてパルス信号のビデオ信号を通過させる。エラー検出部27は、パルス生成部25が生成するタイミングパルス信号によって開始されるアーリーゲート及びレイトゲートの位置が開く期間に従って、受信されるビデオ信号に応じて追跡誤差を検出する。
【0044】
極性判定部29は、追跡誤差の値の符号を検出することにより、追跡誤差の極性を判定する。電圧制御可変発振器28は、極性判定部29により判定された極性と、追跡誤差の大きさに従ってレジスタ21の値を増減することにより、追跡誤差を縮小するようにメインレンジゲートの位置を変更する。反射時間検出部20は、反射時間を示す信号として、レジスタ21に記憶されるメインレンジゲートの位置を出力する。
なお、他の実施例では、反射時間検出部20によるパルス信号の追跡処理は他の方式で行われてもよい。例えば、送信部6によるパルス信号の送信から受信部9による反射パルス信号の受信までの時間と、所定の時間毎に番号を付した時間軸上のメモリセルとを比較し、反射パルス信号に対応するメモリセルの番号を検出することを複数回行うことで、パルス信号の追跡処理を行われてもよい(相互相関法)。
【0045】
続いて、到来信号により生じる反射時間の測定値の変動(バラツキ)について説明する。図7の(A)〜図7の(F)は、測定値の変動の説明図である。
【0046】
船舶50へ到来する到来信号の搬送周波数と、船舶70にて反射して船舶50へ戻るパルス信号の搬送周波数が同じ場合、反射したパルス信号と到来信号とが混信する。図7の(A)は、船舶70にて反射し受信部9にて受信されたパルス信号の例を示し、図7の(B)は到来信号の例を示す。図7の(A)に示す本来のパルス信号に対して図7の(B)に示すような到来信号が混信すると、パルス信号の包絡線、すなわちパルス信号のビデオ信号に乱れが生じる。
【0047】
図7の(C)は送信パルス信号のタイムチャートを示し、図7の(D)は船舶70で反射し且つ到来信号が混信にしたパルス信号のビデオ信号のタイムチャートを示す。図7の(A)にて示す波形と比較して、図7の(D)はビデオ信号の波形が乱れた状態を示している。
【0048】
反射時間検出部20は、船舶70から反射するパルス信号のビデオ信号の波形に基づいてパルス信号の追跡処理を行う。ビデオ信号の波形の乱れは、反射時間検出部20による追跡処理に悪影響を与える。例えば、上記の反射時間検出部20の処理において、ビデオ信号の波形の乱れは、追跡誤差の値に狂いを生じさせる。
【0049】
検出対象の到来信号である無線通信信号は、瞬時的な雑音や不要波成分と比べて比較的長い時間継続する連続波である。したがって、パルス信号の搬送周波数が到来信号の搬送周波数に一致する場合、パルス信号と到来信号との混信によりビデオ信号の波形が継続的に乱れるため、反射時間検出部20の追跡処理により検出するパルス信号の位置が収束しなくなる。
【0050】
この結果、反射時間の測定値の変動が増大する。したがって、判定部12は、反射時間の測定値が所定範囲内でない場合には、測定時のパルス信号の送信周波数が、到来信号の搬送周波数である判定することができる。
【0051】
例えば、図7の(D)に示す位置のビデオ信号について複数回反射時間を検出する場合を考える。すると、ある測定ではメインレンジゲートの位置が図7の(E)に示す位置に位置づけられ、他の測定では波形の変動によってメインレンジゲートの位置が図7の(F)に示す位置に位置づけられる。
【0052】
すると、図7の(E)及び図7の(F)の各ゲートの位置がふらつく。この結果、測定値がT1からT2に変化し、測定値にT2−T1だけ変動が生じる。
【0053】
一方で、パルス信号に混信する電波が瞬時的な雑音や不要波成分である場合、混信電波がパルス信号の追跡に瞬時的に影響を与えても、反射時間検出部20の追跡処理により検出されるパルス信号の位置は収束する。このため、到来信号が混信する場合と比較すると、瞬時的な雑音や不要波成分による測定値の変動は小さい。したがって、瞬時的な雑音や不要波成分が混信しても、これらの電波の周波数が誤って検出する恐れが低減される。
【0054】
図8は、周波数検出方法の第1例の説明図である。なお、他の実施態様においては、下記のオペレーションAA〜AIの各オペレーションはステップであってもよい。
【0055】
オペレーションAAにおいて判定部12は、送信パルス信号の搬送周波数を変化させる指示信号を周波数制御部3に与える。周波数制御部3は、搬送周波数の変更回数を数えるための変数iの値を「1」に初期化する。
【0056】
オペレーションABにおいて周波数制御部3は、所定の第i番目の周波数fiを搬送周波数として指定する周波数情報を局所周波数発生部5へ出力する。周波数変換部4は、局所周波数発生部5から供給される局発信号によりパルス発生部2が出力するパルス波形を周波数変換することによって、搬送周波数fiのパルス信号を生成する。
【0057】
オペレーションACにおいて送信部6はパルス信号を送信する。反射時間検出部20は、反射パルス信号の反射時間を測定する。パルス信号の送信及び反射時間の測定はN回行われる。Nは例えば2以上の整数であってよい。
【0058】
オペレーションADにおいて判定部12は、測定値の変動が所定の閾値を超えるか否かを判定する。判定部12は、複数の値の間の変動について様々な算出方法を利用してよい。例えば判定部12は、測定値の最大値と最小値の差を変動として算出してよい。例えば判定部12は、測定値の標準偏差を変動として算出してよい。
【0059】
測定値の変動が所定の閾値を超える場合(オペレーションAD:Y)、処理はオペレーションAEに進む。測定値の変動が所定の閾値を超えない場合(オペレーションAD:N)、処理はオペレーションAFに進む。
【0060】
オペレーションAEにおいて判定部12は、判定結果「Y」を搬送周波数fiに関連付けて記憶することにより、周波数fiにおいて判定された変動が所定の閾値を超えたことを記憶する。その後、処理はオペレーションAGに進む。
【0061】
一方、オペレーションAFにおいて判定部12は、判定結果「N」を搬送周波数fiに関連付けて記憶することにより、周波数fiにおいて判定された変動が所定の閾値以内であったことを記憶する。その後、処理はオペレーションAGに進む。
【0062】
オペレーションAGにおいて周波数制御部3は、変数iの値を1つ増加させる。オペレーションAHにおいて周波数制御部3は、所定のN回の搬送周波数の変更が完了したか否かを判定する。N回の搬送周波数の変更が完了した場合(オペレーションAH:Y)、処理はオペレーションAIへ進む。N回の搬送周波数の変更が完了しない場合(オペレーションAH:N)、処理はオペレーションABへ戻る。
【0063】
オペレーションAIにおいて判定部12は、判定結果「Y」に関連付けられて記憶された搬送周波数fiを、到来信号の搬送周波数として特定する。その後処理は終了する。
【0064】
なお、図8に示す周波数検出方法では、判定部12は、周波数制御部3が(N−1)回変化させたN個の搬送周波数のそれぞれについて、到来信号の搬送周波数であるか否かを判定した。
【0065】
他の実施例では、周波数制御部3が第1ステップ幅で搬送周波数を(N−1)回変化させてよい。判定部12は、N個の搬送周波数のそれぞれについて到来信号の搬送周波数であるか否かを判定することにより到来信号の搬送周波数を粗検出してよい。
【0066】
N個の搬送周波数の中から到来信号の搬送周波数が発見されたとき、周波数制御部3は、N個の搬送周波数の中の、発見された周波数の前後の周波数間において、第1ステップ幅よりも狭い第2ステップ幅で搬送周波数を(M−1)回変化させてよい。判定部12は、M個の搬送周波数のそれぞれについて到来信号の搬送周波数であるか否かを判定することにより、到来信号の搬送周波数を細検出してよい。以下に示す他の実施例でも同様である。
【0067】
本実施例によれば、無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出が低減される。これにより、無線信号の搬送周波数を特定する精度が向上する。
【0068】
また、上記の通り搬送周波数の粗検出と細検出とを行うことにより、無線信号の搬送周波数を特定する精度をさらに向上することが可能となる。
【0069】
次に周波数検出装置1の他の実施例について説明する。図9は、周波数検出装置1の構成例の第2例を示す図である。第2例の周波数検出装置1は、複数回測定した反射時間の測定値間の変化量を算出する。
【0070】
図3に示す船舶50と船舶70とが相対移動している場合、船舶50と船舶70との間の距離変化に応じて反射時間の測定値が変化する。この反射時間の測定値の変化率は、船舶50と船舶70との間の平均相対速度にも依存する。しかし、一定のインターバル毎に測定された測定値間の変化量を算出すると、算出された各変化量同士の大きさの差は、相対速度の変化によって変動するが、平均相対速度には依存しなくなる。
【0071】
したがって、第2例の周波数検出装置1は、測定値間の変化量の変動が閾値を超える場合に、パルス信号の搬送周波数を到来信号の搬送周波数と判定する。
【0072】
図9において、図2を参照して説明した第1構成例の各構成要素と同様の構成要素には同一の参照符号を付する。同一の参照符号が付された構成要素は特に説明しない限り同じである。また、以下に説明する第2構成例の構成要素やその機能を他の実施例が備えていてもよい。
【0073】
周波数検出装置1は、変化量算出部14を備える。変化量算出部14は、周波数制御部3に対して、パルス信号の搬送周波数を変化させる指示信号を与える。変化量算出部14は、送信パルス信号の搬送周波数を周波数制御部3が変化させる間、パルス検出部11により測定されるパルス信号の反射時間の測定値を受信する。
【0074】
パルス検出部11は、周波数制御部3によって設定される複数の搬送周波数のそれぞれにおいて、複数回送信され各々船舶70で反射する同一搬送周波数のパルス信号の反射時間を検出する。変化量算出部14は、一定の測定周期でパルス検出部11により測定された反射時間の測定値間の変化量を算出する。
【0075】
次に示す表1は、同一搬送周波数のパルス信号の反射時間を複数回検出した場合における、検出した反射時間に基づき測定される船舶50及び船舶70間の距離の測定値の例である。
【0076】
【表1】
【0077】
表1は、到来信号の搬送周波数とパルス信号との混信がない場合の測定結果を示す。10回の測定の間のインターバルは略同じである。第1回目及び第2回目の測定値間の変化量Δdは9mであり、第2回目及び第3回目の測定値間の変化量Δdは9mであり、第3回目及び第4回目の測定値間の変化量Δdは11mである。
【0078】
第4回目及び第5回目の測定値間の変化量Δdは8mであり、第5回目及び第6回目の測定値間の変化量Δdは11mであり、第6回目及び第7回目の測定値間の変化量Δdは8mである。第7回目及び第8回目の測定値間の変化量Δdは9mであり、第8回目及び第9回目の測定値間の変化量Δdは9mであり、第9回目及び第10回目の測定値間の変化量Δdは9mである。
【0079】
なお、表1は、船舶50及び船舶70が接近している場合の測定結果を示す。測定間隔毎に約10mずつ船舶50と船舶70間との間の距離が変化している。変化量Δd間の差の最大値は3mである。
【0080】
次に示す表2は、到来信号とパルス信号が混信する場合の測定結果である。
【0081】
【表2】
【0082】
第1回目及び第2回目の測定値間の変化量Δdは297mであり、第2回目及び第3回目の測定値間の変化量Δdは243mであり、第3回目及び第4回目の測定値間の変化量Δdは193mである。第4回目及び第5回目の測定値間の変化量Δdは122mであり、第5回目及び第6回目の測定値間の変化量Δdは188mであり、第6回目及び第7回目の測定値間の変化量Δdは228mである。第7回目及び第8回目の測定値間の変化量Δdは278mであり、第8回目及び第9回目の測定値間の変化量Δdは256mであり、第9回目及び第10回目の測定値間の変化量Δdは214mである。
【0083】
本測定結果の例は、船舶50及び船舶70が接近している場合の測定結果を示す。測定間隔毎に約10mずつ船舶50と船舶70との間の距離が変化している。変化量Δd間の差の最大値は175mである。
【0084】
このように、測定値間の変化量の変動に注目すれば、船舶50と船舶70とが相対移動している場合に、測定値間の変化量の変動の大きさが、平均相対速度の違いに依存しなくなる。このため、到来信号が混信しないときの変動を小さく抑えることができる。
【0085】
一方で、表2に示す通り到来信号が混信すると測定値間の変化量の変動は増加する。このように、測定値間の変化量の変動が所定の閾値を超えるか否かを判定することにより、平均相対速度の大きさに関わらず、到来信号の混信の検出感度を維持することができる。
【0086】
図9を参照する。判定部12は、変化量算出部14は算出する変化量を受信する。測定値間の変化量の変動が閾値を超える場合に、このような変動が生じた搬送周波数を到来信号の搬送周波数と判定する。
【0087】
以下、第2例の周波数検出装置1によって行われる周波数検出方法を説明する。図10は、周波数検出方法の第2例の説明図である。なお、他の実施態様においては、下記のオペレーションBA〜BJの各オペレーションはステップであってもよい。
【0088】
オペレーションBAにおいて変化量算出部14は、送信パルス信号の搬送周波数を変化させる指示信号を周波数制御部3に与える。周波数制御部3は、搬送周波数の変更回数を数えるための変数iの値を「1」に初期化する。
【0089】
オペレーションBB及びBCの処理は、図8に示すオペレーションAB及びACの処理と同様である。オペレーションBDにおいて変化量算出部14は、一定の測定周期でパルス検出部11により測定された反射時間の測定値間の変化量を算出する。
【0090】
オペレーションBEにおいて判定部12は、変化量の変動が所定の閾値を超えるか否かを判定する。変動が所定の閾値を超える場合(オペレーションBE:Y)、処理はオペレーションBFに進む。変動が所定の閾値を超えない場合(オペレーションBE:N)、処理はオペレーションBGに進む。
【0091】
オペレーションBF〜GJの処理は、図8に示すオペレーションAE〜AIの処理と同様である。
【0092】
本実施例によれば、反射時間の変動の大きさを判定する際に、船舶50及び船舶70の相対移動による平均相対速度の違いを変動から除去することができる。これにより、船舶50及び船舶70の相対移動に関わらず、無線信号の搬送周波数の検出精度を維持することができる。
【0093】
次に周波数検出装置1の他の実施例について説明する。図11は、周波数検出装置1の構成例の第3例を示す図である。第3例の周波数検出装置1は、パルス信号を反射する物体の指定をユーザが行うことを可能にする。判定部12は、ユーザにより指定された物体で反射したパルス信号の反射時間の測定値に生ずる変動に基づいて到来信号の搬送周波数を判定する。
【0094】
図11において、図2を参照して説明した第1構成例の各構成要素と同様の構成要素には同一の参照符号を付する。同一の参照符号が付された構成要素は特に説明しない限り同じである。
【0095】
周波数検出装置1は、レーダ画像作成部15と、目標指定部16と、指向性制御部17を備える。レーダ画像作成部15は、パルス検出部11によって検出された受信パルスに基づいて、船舶50の周囲においてパルス信号を反射した物体の像を示すレーダ画像を生成する。出力部13はレーダ画像を出力する。
【0096】
目標指定部16は、レーダ画像に現れた物体のいずれかをユーザが指定する指定入力を受け付ける。目標指定部16は、例えば出力部13が出力するレーダ画像上のいずれかの点を指定できる入力インタフェースであってよい。例えば目標指定部16は、タッチペン、タッチパネル、マウス及びトラックボールなどであってよい。
【0097】
目標指定部16は、指定された物体を識別する識別情報を生成する。識別情報は、レーダ画像上における物体の座標情報や、レーダ画像上で認識された物体に割り当てられる識別子であってよい。目標指定部16は、識別情報を判定部12へ出力する。また目標指定部16は、指定された物体が存在する位置を示す位置情報を指向性制御部17へ出力する。
【0098】
判定部12は、目標指定部16から受信する識別情報に従って、パルス検出部11から受信する反射時間の測定値のうち、ユーザにより指定された物体から反射したパルス信号に関するものを選択する。
【0099】
これに加えて又はこれに代えて、パルス検出部11は、目標指定部16から識別情報を受信し、ユーザにより指定された物体から反射したパルス信号の反射時間の測定値を選択して判定部12へ出力してもよい。また、パルス検出部11は、ユーザにより指定された物体から反射したパルス信号の反射時間の測定値を、他の測定値と区別できる形で判定部12へ出力してもよい。
【0100】
判定部12は、ユーザにより指定された物体で反射したパルス信号の反射時間の測定値に基づいて、到来信号の搬送周波数を判定する。
【0101】
また、指向性制御部17は、ユーザが指定する物体の位置情報を目標指定部16から受信したとき、送信アンテナ7及び/又は受信アンテナ8の指向性を、指定された物体が存在する方向へ向けてよい。なお、目標指定部16による指定に基づく送信アンテナ7及び/又は受信アンテナ8の指向性の制御を行わない場合には、指向性制御部17は省略してよい。
【0102】
本実施例によれば、到来信号の発信源の物体を、到来信号の搬送周波数を測定する際に使用するパルス信号の反射物体として指定することが可能となる。パルス信号の反射物体として発信源を指定することにより、反射したパルス信号の受信方向と、到来信号の受信方向とを合わせることができるので、反射パルスと到来信号とをより良く混信させることが可能となる。
【0103】
反射パルスと到来信号とがより良く混信することにより、反射時間の測定結果又はその変化量の変動を増大させることができるので、到来信号の搬送周波数の検出感度をより向上することができる。
【0104】
また、アンテナの指向性を、発信源に向けることにより、他の方向から飛来するノイズや不要波成分による影響を低減することが可能となる。また、アンテナ指向性を発信源に向けることにより、発信源に向けてパルス信号を送信できる期間が増えるため、検出に要する時間を短縮することができる。
【符号の説明】
【0105】
1 周波数測定装置
6 送信部
9 受信部
12 判定部
14 変化量算出部
16 目標指定部
17 指向性制御部
【特許請求の範囲】
【請求項1】
パルス信号を送信する送信部と、
信号を受信する受信部と、
前記送信部により送信され物体で反射して前記受信部により受信されたパルス信号の前記送信部による送信から前記受信部による受信までの反射時間を複数回検出する検出部と、
前記反射時間が所定範囲内であるか否かを判定し、前記反射時間が前記所定範囲内でない場合に前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部と、
を備える周波数検出装置。
【請求項2】
前記判定部は、同じ搬送周波数の前記パルス信号について複数回検出した前記反射時間の測定値に生じる変動が閾値を超える場合に、前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する請求項1に記載の周波数検出装置。
【請求項3】
同じ搬送周波数の前記パルス信号について複数回検出した前記反射時間の測定値間の変化量を算出する変化量算出部を備え、
前記判定部は、前記変化量に生じる変動が閾値を超える場合に、前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する請求項1に記載の周波数検出装置。
【請求項4】
前記判定部が反射時間を判定するパルス信号を反射する物体に関してユーザが指定する指定入力を受け付ける目標指定部を備えることを特徴とする請求項1〜3のいずれか一項に記載の周波数検出装置。
【請求項5】
前記パルス信号を送信及び/又は受信するアンテナの指向性を、前記目標指定部によって指定された物体に向ける指向性制御部を備えることを特徴とする請求項4に記載の周波数検出装置。
【請求項6】
パルス信号を送信し、
物体で反射した前記パルス信号を受信し、
受信される前記パルス信号の送信から受信までの反射時間を複数回検出し、
前記反射時間が所定範囲内であるか否かを判定し、
前記反射時間が前記所定範囲内でない場合に前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する、
ことを特徴とする周波数検出方法。
【請求項1】
パルス信号を送信する送信部と、
信号を受信する受信部と、
前記送信部により送信され物体で反射して前記受信部により受信されたパルス信号の前記送信部による送信から前記受信部による受信までの反射時間を複数回検出する検出部と、
前記反射時間が所定範囲内であるか否かを判定し、前記反射時間が前記所定範囲内でない場合に前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部と、
を備える周波数検出装置。
【請求項2】
前記判定部は、同じ搬送周波数の前記パルス信号について複数回検出した前記反射時間の測定値に生じる変動が閾値を超える場合に、前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する請求項1に記載の周波数検出装置。
【請求項3】
同じ搬送周波数の前記パルス信号について複数回検出した前記反射時間の測定値間の変化量を算出する変化量算出部を備え、
前記判定部は、前記変化量に生じる変動が閾値を超える場合に、前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する請求項1に記載の周波数検出装置。
【請求項4】
前記判定部が反射時間を判定するパルス信号を反射する物体に関してユーザが指定する指定入力を受け付ける目標指定部を備えることを特徴とする請求項1〜3のいずれか一項に記載の周波数検出装置。
【請求項5】
前記パルス信号を送信及び/又は受信するアンテナの指向性を、前記目標指定部によって指定された物体に向ける指向性制御部を備えることを特徴とする請求項4に記載の周波数検出装置。
【請求項6】
パルス信号を送信し、
物体で反射した前記パルス信号を受信し、
受信される前記パルス信号の送信から受信までの反射時間を複数回検出し、
前記反射時間が所定範囲内であるか否かを判定し、
前記反射時間が前記所定範囲内でない場合に前記パルス信号の搬送周波数を検出対象の搬送周波数と判定する、
ことを特徴とする周波数検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−150037(P2012−150037A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−9679(P2011−9679)
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]