
周辺物体検出装置
【課題】レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【解決手段】レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報(例えば、周辺物体の存在確率)を取得し、各方向の情報に対して信頼度(例えば、遮蔽由来信頼度)を付与し、各方向の情報と付与した各信頼度に基づいて周辺物体の情報を検出し、特に、周辺物体を検知しなかった方向の情報に付与する信頼度を周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
【解決手段】レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報(例えば、周辺物体の存在確率)を取得し、各方向の情報に対して信頼度(例えば、遮蔽由来信頼度)を付与し、各方向の情報と付与した各信頼度に基づいて周辺物体の情報を検出し、特に、周辺物体を検知しなかった方向の情報に付与する信頼度を周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置に関する。
【背景技術】
【0002】
障害物を回避する経路の生成や障害物との衝突の防止(軽減)等を行う各種運転支援では、遅延なく高精度に障害物を検出することが重要となる。特許文献1には、レーダセンサを利用して障害物を検出し、自車両の走行進路候補と自車両周辺の障害物との干渉が想定されない安全領域を算出し、安全領域に基づいて運転許可領域を設定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−131838号公報
【特許文献2】特開平10−124799号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
障害物検出方法には、過去の障害物の検出結果も加味するために、一定時間毎に求められる障害物マップ(障害物の存在確率を示したグリッドマップ)を蓄積しておき、最新の障害物マップと過去の障害物マップとの重ね合わせ処理によって最終的な障害物マップを生成する方法がある。レーダセンサで過去に物体が検出されなかった方向においてレーダセンサで新たに物体が検出された場合、過去の障害物マップにおいてその方向の存在確率が0となっているので、重ね合わせ処理ではその存在確率が加味されて新たに検出された物体に対する存在確率が小さくなる。その結果、レーダセンサで新たな物体が検出されているが、検出直後は障害物として検出されず、障害物の検出タイミング早期化の点において改善の余地がある。
【0005】
そこで、本発明は、レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る周辺物体検出装置は、レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報を取得する検知方向情報取得手段と、検知方向情報取得手段で取得した各方向の情報に対して信頼度を付与する信頼度付与手段と、検知方向情報取得手段で取得した各方向の情報と信頼度付与手段で付与した各信頼度に基づいて周辺物体の情報を検出する周辺物体検出手段とを備え、信頼度付与手段は、周辺物体を検知しなかった方向の情報に付与する信頼度を、周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
【0007】
この周辺物体検出装置では、所定時間毎に、レーダセンサで各方向をスキャンし、各方向についてのセンサ情報(特に、反射点についての情報)を検出する。そして、周辺物体検出装置では、検知方向情報取得手段が、そのセンサ情報を用いてレーダセンサでスキャンした各方向(周辺物体を検知した方向、周辺物体を検知しなかった方向)の情報をそれぞれ取得する。さらに、周辺物体検出装置では、信頼度付与手段がレーダセンサでスキャンした各方向の情報に対して信頼度をそれぞれ付与する。この際、周辺物体を検知した方向の情報に対しては、レーダセンサで検出されており、信頼できる情報なので、高い信頼度を付与する。一方、周辺物体を検知しなかった方向の情報に対しては、レーダセンサで検出されていないので、それよりは低い信頼度を付与する。周辺物体検出装置では、所定時間毎に、周辺物体検出手段がレーダセンサでスキャンした各方向の情報とそれに対して付与された各信頼度に基づいて周辺物体の情報を検出する。さらに、周辺物体検出装置では、所定時間毎に得られる今回の検出結果と前回までに得られている過去の検出結果に基づいて最終的な周辺物体の検出結果を取得する。この際、周辺物体が検知されなかった方向(レーダセンサで反射点が得られない方向)の情報に対しては低い信頼度が設定されているので、過去の検出結果において周辺物体が検知されなかった方向についての情報が加味される度合いが低くなる(影響を受け難い)。その結果、過去に周辺物体が検知されなかった方向においてレーダセンサで新たに物体が検知された(反射点が得られた)場合、今回の検出結果と過去の検出結果に基づいて最終的な周辺物体の検出結果を生成しても、遅延なく、新たに検知された物体を最終的な周辺物体の検出結果として得ることができる。このように、周辺物体検出装置では、周辺物体を検知しなかった方向の情報に対しては周辺物体を検知した方向の情報に対する信頼度よりも低い信頼度を付与することにより、過去の検出結果を加味する周辺物体検出において検出性能(特に、検出タイミング)が向上する。
【0008】
本発明の上記周辺物体検出装置では、検知方向情報取得手段は、周辺物体の存在確率を取得し、信頼度付与手段は、周辺物体の存在確率に対する信頼度を付与する構成としてもよい。
【0009】
この周辺物体検出装置では、所定時間毎に、検知方向情報取得手段がレーダセンサでスキャンした各方向における周辺物体の存在確率をそれぞれ取得する。そして、周辺物体検出装置では、信頼度付与手段がレーダセンサでスキャンした各方向についての存在確率に対して信頼度をそれぞれ付与する。この場合、周辺物体が検知されなかった方向の存在確率(最も低い存在確率)に対しては低い信頼度が設定されているので、過去の検出結果において周辺物体が検知されなかった方向については最も低い存在確率が加味される度合いが低くなる。その結果、過去に周辺物体が検知されなかった方向においてレーダセンサで新たに物体が検知された場合、今回の検出結果と過去の検出結果に基づいて最終的な周辺物体の検出結果を生成しても新たに検出された物体に対する存在確率が低くなり難く、遅延なく、新たに検知された物体を最終的な周辺物体の検出結果として得ることができる。
【0010】
本発明の上記周辺物体検出装置では、レーダセンサは、レーザレーダであると好適である。
【発明の効果】
【0011】
本発明によれば、周辺物体を検知しなかった方向の情報に対しては周辺物体を検知した方向の情報に対する信頼度よりも低い信頼度を付与することにより、過去の検出結果を加味する周辺物体検出において検出性能(特に、検出タイミング)が向上する。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る障害物検出装置の構成図である。
【図2】遮蔽由来信頼度モデルの一例である。
【図3】遮蔽由来信頼度と存在確率との関係図である。
【図4】障害物マップの一例である。
【図5】本実施の形態に係るEUCにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る周辺物体検出装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明の周辺物体検出装置を、車両に搭載される障害物検出装置に適用する。本実施の形態に係る障害物検出装置は、レーザレーダを用いたアクティブセンシングであり、自車両の走行に障害となる物体(例えば、車両、自動二輪車、自転車、歩行者、車両からの落下物、道路工事に関する物体)を検出し、その検出した障害物の存在確率を示す障害物マップを各種運転支援装置(例えば、障害物を回避する経路を生成する装置や障害物との衝突を防止(軽減)する装置)に提供する。本実施の形態に係る障害物検出装置では、一定時間毎に(フレーム毎に)、最新(今回)のフレームの障害物マップと過去のフレームの障害物マップとの重ね合わせ処理によって最終的に提供する障害物マップを生成する。
【0015】
図1〜図4を参照して、本実施の形態に係る障害物検出装置1について説明する。図1は、本実施の形態に係る障害物検出装置の構成図である。図2は、遮蔽由来信頼度モデルの一例である。図3は、遮蔽由来信頼度と存在確率との関係図である。図4は、障害物マップの一例である。
【0016】
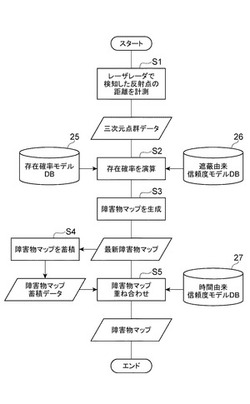
障害物検出装置1は、フレーム毎に、レーザレーダによるレーダ情報を用いて反射点(検出点)の情報からなる三次元点群データを生成し、三次元点群データに基づいてレーザレーダの各スキャン方向についての存在確率を演算し、存在確率を示す障害物マップを生成し、最新フレームの障害物マップと過去のフレームの障害物マップによる重ね合わせ処理によって最終的な障害物マップを生成する。特に、障害物検出装置1では、新たに出現した障害物を高性能に検出するために、各スキャン方向についての存在確率に対して信頼度をそれぞれ付与し、反射点が得られていない方向における存在確率に対しては小さい信頼度を付与する。なお、本実施の形態ではレーザレーダによる反射点を三次元として取り扱うが、高さが一定の水平方向の二次元で取り扱ってもよい。
【0017】
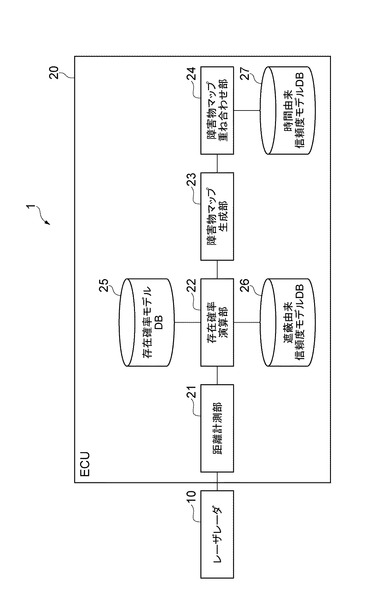
障害物検出装置1は、レーザレーダ10、ECU[Electronic Control Unit]20(距離計測部21、存在確率演算部22、障害物マップ生成部23、障害物マップ重ね合わせ部24、存在確率モデルデータベース25、遮蔽由来信頼度モデルデータベース26、時間由来信頼度モデルデータベース27)を備えている。
【0018】
なお、本実施の形態では、レーザレーダ10が特許請求の範囲に記載するレーダセンサに相当し、距離計測部21、存在確率演算部22及び存在確率モデルデータベース25が特許請求の範囲に記載する検知方向情報取得手段に相当し、存在確率演算部22及び遮蔽由来信頼度モデルデータベース26が特許請求の範囲に記載する信頼度付与手段に相当し、障害物マップ生成部23及び障害物マップ重ね合わせ部24が特許請求の範囲に記載する周辺物体検出手段に相当する。
【0019】
レーザレーダ10は、レーダセンサであり、レーザ光を利用して物体を検出する。レーザレーダ10は、自車両の前端部の中央に取り付けられる。レーザレーダ10は、レーザ光の発光部と受光部を水平方向及び鉛直方向に回転させる機構を有している。レーザレーダ10では、フレーム毎に(一定時間毎に)、水平方向に発光部と受光部を回転させるとともに鉛直方向に発光部と受光部を回転させ、レーザ光を各スキャン方向で出射し、反射してきたレーザ光を受光する。スキャンする方法としては、例えば、車両の中心線上の方向角を0°とし、一定角度ずつ方向を変えてスキャンする方法、中心線付近ほど小さい角度で方向を変えてスキャンする方法がる。そして、レーザレーダ10では、フレーム毎に、受光できた各反射点(各検出点)についての情報(水平方向のスキャン方向角、鉛直方向のスキャン方向角、出射時刻、受光時刻、受光強度(反射強度)等)からなるレーダ信号をECU20に送信する。ちなみに、反射が得られない各方向については、物体が存在しないのかあるいは物体は存在するが、物体とレーザ光との相対角度の関係で反射したレーダ光をレーザレーダ10で受光できなかったのかは判らない。なお、二次元の場合、レーザレーダ10では水平方向だけでスキャンし、反射点の情報では水平方向のスキャン方向角だけが得られる。また、1個のレーザレーダ10を備える構成としているが、複数個のレーザレーダ10を備える構成としてもよい。
【0020】
ECU20は、CPU[CentralProcessing Unit]、ROM[Read Only Memory]、RAM[Random Access Memory]等からなる電子制御ユニットであり、障害物検出装置1を統括制御する。ECU20では、ROMに記憶されている障害物検出装置1用のアプリケーションプログラムをRAMにロードしてCPUで実行することにより距離計測部21、存在確率演算部22、障害物マップ生成部23、障害物マップ重ね合わせ部24の各処理部が構成され、存在確率モデルデータベース25、遮蔽由来信頼度モデルデータベース26、時間由来信頼度モデルデータベース27が予め構築されている。ECU20では、フレーム毎に、レーザレーダ10からレーダ信号を受信し、各処理部21,22,23,24での処理を行い、障害物マップを運転支援装置に送信する。
【0021】
距離計測部21では、レーダ信号に含まれる反射点毎に、レーザ光の速度を出射時刻と受光時刻との時間差で除算して反射点までの距離を求める。各反射点の情報には水平方向のスキャン方向角と鉛直方向のスキャン方向角(物体を検知できた方向の情報)が含まれているので、この求められた距離はレーザレーダ10の位置を原点として水平方向のスキャン方向角と鉛直方向のスキャン方向角からなる方向(物体を検知できた方向)における物体までの距離となる。ここでは、全ての反射点についての各反射点の方向における距離情報(レーザレーダ10との相対位置)からなる三次元群データが得られる。ちなみに、レーザレーダ10で反射点が得られていない方向(物体を検知できなかった方向)では、この距離情報は得られない。
【0022】
存在確率演算部22では、距離計測部21で得られた三次元群データに含まれる反射点毎に、その反射点が存在する方向における存在確率を演算する。この演算では、存在確率モデルデータベース25に格納されている存在確率モデルの中から反射点の距離に応じて存在確率モデルを抽出し、その抽出した存在確率モデルを用いて反射点の距離(位置)を基準にして反射点が存在する方向における各距離(各位置)での存在確率を演算する。存在確率モデルデータベース25に格納されている存在確率モデルは、レーザレーダ10(原点)からの距離毎(例えば、1m、3m、5m、10m毎)のモデルが用意されている。存在確率モデルとしては、例えば、反射点の位置を中心(存在確率が最大)として存在確率を正規分布させたモデル、反射点の位置の存在確率を最大とし、その他の位置の存在確率を最小としたモデルがある。存在確率は、例えば、1(最大)〜0(最小)、100[%](最大)〜0[%](最小)で表される。ちなみに、正規分布の存在確率モデルを用いた場合、反射点を検知する際のノイズや反射点のバラツキを抑制した存在確率を設定することができる。
【0023】
また、存在確率演算部22では、レーザレーダ10の検知範囲において三次元群データに含まれる反射点が存在する方向以外の方向(すなわち、反射点が存在しない方向)における存在確率を設定する。ここでは、反射点が存在しない方向における存在確率として最小値を設定する。
【0024】
さらに、存在確率演算部22では、各方向の存在確率に対して遮蔽由来の信頼度を付与する。ここでは、遮蔽由来信頼度モデルデータベース26に格納されている遮蔽由来信頼度モデルの中から反射点の有無に応じて遮蔽由来信頼度モデルを抽出し、その抽出した遮蔽由来信頼度モデルに従って各方向における存在確率に対して遮蔽由来信頼度を付与する。信頼度は、1〜0の値で表され、1が最も信頼度が高く、0が最も信頼度が低い。
【0025】
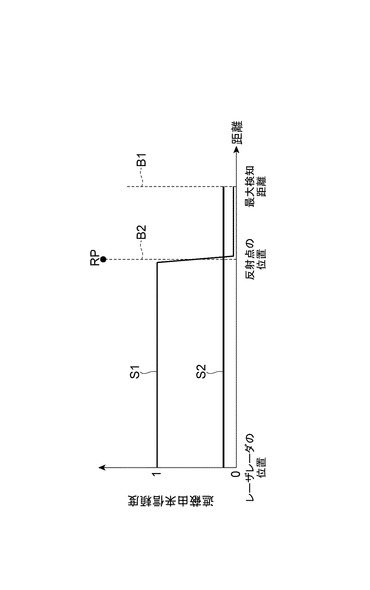
図2には、遮蔽由来信頼度モデルの一例を示しており、横軸がレーザレーダ10の位置を原点とした距離であり、縦軸が遮蔽由来の信頼度である。図2では、破線B1で示す距離がレーザレーダ10の最大検知距離であり、破線B2がサンプルとなる反射点RPまでの距離である。符号S1で示す遮蔽由来信頼度モデルは、反射点が存在する場合(物体が存在する場合)の信頼度モデルであり、レーザレーダ10から反射点(物体)の前までは物体が存在しないことを100%信じてもよいので、信頼度として最大値の1を設定し、反射点(物体)の後側は物体に遮蔽されていて物体が存在するかは判らないので、信頼度として下限値(0に非常に近い値であり、0でもよい)を設定し、反射点(物体)の位置を基準にして信頼度の最大値から下限値に変化させたモデルである。符号S2で示す遮蔽由来信頼度モデルは、反射点が存在しない場合(物体が存在しないかあるいは物体は存在するがレーザレーダ10に反射光が戻らなかったか不明な場合)の信頼度モデルであり、状況が不明で信頼性は低いので、信頼度として一定の低い値を設定したモデルである。この低い信頼度としては、例えば、信頼度の下限値よりも少し高い値(下限値の1.1倍等)とする。
【0026】
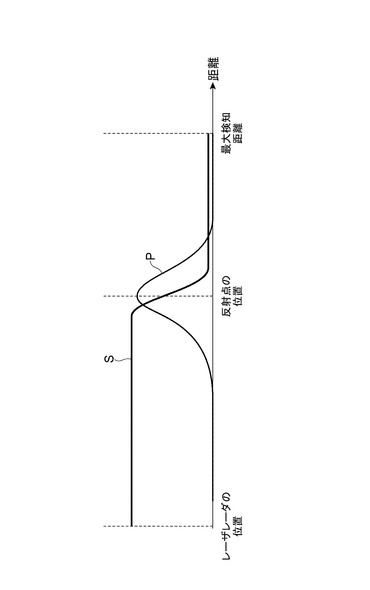
なお、各方向における存在確率に対して遮蔽由来信頼度をそれぞれ付与するだけでなく、方向の各位置での存在確率に対して遮蔽由来信頼度を加味した存在確率を演算しておいてもよい。例えば、図3に示すように、反射点が存在する方向における存在確率(正規分布の存在確率)Pとその方向における存在確率に対して付与された信頼度Sの場合、その方向の各位置(各距離)の存在確率と信頼度とをそれぞれ乗算すると、反射点の前後では正規分布の存在確率が鈍されて、正規分布の凸状よりも緩やかに変化する存在確率となる。
【0027】
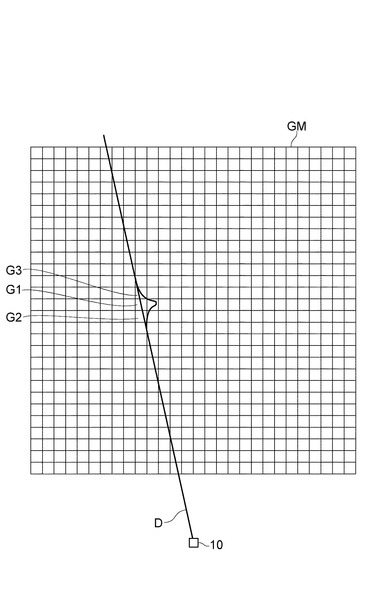
障害物マップ生成部23では、存在確率演算部22で演算した各方向における存在確率及び付与した遮蔽由来信頼度を用いて、グリッドマップの各グリッドに存在確率と信頼度を貼り付け、障害物マップを生成する。障害物マップは、レーザレーダ10の位置を基準にして左右及び前方に設定した平面上に形成される格子状の多数のグリッドからなるマップであり、各グリッドに少なくとも存在確率が貼り付けられる。障害物マップでは、グリッドの存在確率が高いほどその位置に障害物が存在する可能性が高いことを示す。障害物マップは、1つのマップでもよいし、鉛直方向における各方向に応じた複数のマップでもよい。図4には、障害物マップGMの一例を示しており、反射点が存在するある方向Dにおいて反射点の位置を中心にして正規分布の存在確率が演算されている場合、障害物マップGMのグリッドG1には大きい存在確率及び大きい遮蔽由来信頼度が貼り付けられ、その前後のグリッドG2,G3にはそれより小さい存在確率及び小さい遮蔽由来信頼度が貼り付けられ、方向Dにおける存在確率が0かつ反射点の前側に対応する各グリッドには0の存在確率及び最大値の遮蔽由来信頼度が貼り付けられ、方向Dにおける存在確率が0かつ反射点の後側に対応する各グリッドには0の存在確率及び下限値の遮蔽由来信頼度が貼り付けられる。ただし、遮蔽由来信頼度がある閾値を下回った場合、そのグリッドの存在確率は0.5(物体があるかどうか不明の領域)として扱う。障害物マップ生成部23では、フレーム毎に最新の障害物マップを生成すると、ECU20内のRAMの所定の領域にその障害物マップを蓄積しておく。この蓄積される障害物マップは障害物マップ重ね合わせ部24で用いられ、障害物マップ重ね合わせ部24で用いられる過去のフレーム数分の障害物マップが順次蓄積される。なお、存在確率演算部22で各位置での存在確率に対して遮蔽由来信頼度を加味した存在確率を演算している場合には、その遮蔽由来信頼度が加味された存在確率をグリッドマップの各グリッドに貼り付ける。
【0028】
障害物マップ重ね合わせ部24では、障害物マップ生成部23で生成した最新の障害物マップと蓄積されている過去の数フレーム分(あるいは、数10フレーム分)の障害物マップとを重ね合わせ、最終的に提供する障害物マップを生成する。ここでは、時間由来信頼度モデルデータベース27に格納されている時間由来信頼度モデルの中から時間由来信頼度モデルを抽出し、その抽出した時間由来信頼度モデルの各時間のフレームに対する信頼度に従って、最新の障害物マップの各グリッドの存在確率に対して過去の各フレームの障害物マップにおける対応するグリッドの存在確率を加味して存在確率をそれぞれ演算する。時間由来信頼度モデルデータベース27に格納されている時間由来信頼度モデルとしては、例えば、過去のフレームほど加味度合いを少なくしたモデル(最新のフレームが最大の信頼度、最も過去のフレームが最小の信頼度となるモデル)がある。さらに、障害物マップには各グリッドに遮蔽由来信頼度が貼り付けられているので、上記のグリッド毎の存在確率の演算において、遮蔽由来信頼度も加味し、存在確率を演算する。したがって、グリッド毎に、最新のフレームの存在確率と時間由来信頼度及び遮蔽由来信頼度と、過去の各フレームの存在確率と時間由来信頼度及び遮蔽由来信頼度とを用いて最終的な存在確率を演算し、その存在確率を障害物マップの各グリッドに貼り付ける。
【0029】
ここで、遮蔽由来信頼度を導入することによって、過去に反射点が得られなかった方向において最新のフレームで反射点が得られた場合に、最終的な障害物マップにおいてその反射点が得られた位置のグリッドで高い存在確率となる例を示す。この例では、説明を簡単にするために、重ね合わせ処理に用いる過去のフレームを1フレームだけとし、最新のフレームと過去のフレームの時間由来信頼度は共に1とする(従って、以下の式では時間由来信頼度については省略する)。最新のフレームでは、反射点が得られたので、反射点の位置のグリッドの遮蔽由来信頼度C1を1とし、存在確率P1を1とする。過去のフレームでは、反射点が得られていないので、その対応するグリッドの遮蔽由来信頼度C0を0.05とし、存在確率P0を0とする。この場合、そのグリッドの最終的な存在確率は、重ね合わせ処理の演算で((P0×C0)+(P1×C1))/(C0+C1)=約0.95となる。このように、新たに反射点を検知した直後から高い存在確率を得ることができ、遅れることなく障害物として検出される。しかし、従来は、遮蔽由来信頼度が考慮されていないので、上記のような例の場合にはC1とC0を共に1として重ね合わせ処理を行う。この場合、そのグリッドの最終的な存在確率は、重ね合わせ処理の演算で((P0×C0)+(P1×C1))/(C0+C1)=0.5となる。このように、新たに反射点を検知した直後は低い存在確率しか得られず、フレームを重ねるごとに徐々に存在確率が高くなり、遅れて障害物として検出される。
【0030】
このように、障害物検出装置1では過去に反射点が得られていなかった(物体が検知されていなかった)方向に対しては低い遮蔽由来信頼度が設定されているので、過去のフレームの障害物マップにおいて反射点が得られなかった方向についての存在確率の0が加味される度合いが低くなる(存在確率の0の影響を受け難い)。その結果、過去に反射点が得られなかった方向においてレーザレーダ10で新たに反射点が得られた場合、最新のフレームの障害物マップと過去のフレームの障害物マップに基づいて最終的な障害物マップを生成しても、遅延なく、新たに得られた反射点において存在確率が高くなる最終的な障害物マップを得ることができる。
【0031】
図1〜図4を参照して、障害物検出装置1における動作について説明する。特に、ECU20における処理について図5のフローチャートに沿って説明する。図5は、本実施の形態に係るEUCにおける処理の流れを示すフローチャートである。障害物検出装置1では、下記に説明する動作をフレーム毎に繰り返し行う。
【0032】
レーザレーダ10では、フレーム毎に、水平方向及び鉛直方向における各スキャン方向においてレーザ光を出射するとともにその反射光を受光する。そして、レーザレーダ10では、受光できた各反射点についての情報をレーダ信号としてECU20に送信する。
【0033】
フレーム毎に、ECU20では、受信したレーダ信号に基づいて、レーザレーダ10で検知した各反射点までの距離をそれぞれ計測(演算)する(S1)。ここで、最新のフレームで検知できた反射点の情報からなる三次元群データが得られる。
【0034】
EUU20では、三次元群データに含まれる反射点毎に、その反射点までの距離に応じて存在確率モデルデータベース25から存在確率モデルを抽出し、その存在確率モデルを用いて反射点が得られた方向における存在確率を演算する(S2)。さらに、EUU20では、遮蔽由来信頼度モデルデータベース26から反射点の有無に応じて遮蔽由来信頼度モデルを抽出し、その遮蔽由来信頼度モデルを用いて各方向における存在確率に対して遮蔽由来信頼度を付与する(S2)。ここで、遮蔽由来信頼度を加味した存在確率を演算してもよい。そして、ECU20では、各方向における存在確率と信頼度を用いて、最新の障害物マップを生成する(S3)。さらに、ECU20では、その最新の障害物マップを蓄積しておく(S4)。
【0035】
ECU20では、時間由来信頼度モデルデータベース27から時間由来信頼度モデルを抽出し、最新の障害物マップと蓄積されている過去のフレームの障害物マップとを時間由来信頼度モデルの各時間のフレームの時間由来信頼度及び各グリッドの遮蔽由来信頼度に従って重ね合わせ、最終的な障害物マップを生成する(S5)。そして、ECU20では、その最終的な障害物マップを運転支援装置に送信する。
【0036】
この障害物検出装置1によれば、遮蔽由来信頼度を導入し、各方向における存在確率に対して遮蔽由来信頼度を付与することにより、障害物の検出性能が向上する。特に、障害物検出装置1によれば、レーザレーダ10で反射点が得られていない方向における存在確率(最小値の0)に対する遮蔽由来信頼度を低い値とすることにより、その方向で新たに反射点が得られた場合に反射点が得られた直後から重ね合わせ処理後の存在確率を高くすることができ、遅延なく障害物を検出することができる。
【0037】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0038】
例えば、本実施の形態では自車両の走行に障害となる障害物検出装置に適用したが、自車両周辺の歩行者を検出する歩行者検出装置、自車両周辺の車両を検出する他車両検出装置等に他の周辺物体検出装置にも適用できる。
【0039】
また、本実施の形態ではレーダセンサとしてレーザレーダを適用したが、ミリ波レーダ等の他のレーダセンサを適用してもよい。
【0040】
また、本実施の形態では過去の障害物マップと最新の障害物マップとの重ね合せ処理によって最終的な障害物マップを生成する構成としたが、周辺物体の過去の検出結果と最新(今回)の検出結果に基づいて周辺物体を検出する方法については他の方法でもよい。
【0041】
また、本実施の形態では障害物の存在情報として存在確率を用いたが、他の情報を用いてもよい。例えば、存在するか否かの0/1の情報がある。
【符号の説明】
【0042】
1…障害物検出装置、10…レーザレーダ、20…ECU、21…距離計測部、22…存在確率演算部、23…障害物マップ生成部、24…障害物マップ重ね合わせ部、25…存在確率モデルデータベース、26…遮蔽由来信頼度モデルデータベース、27…時間由来信頼度モデルデータベース。
【技術分野】
【0001】
本発明は、レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置に関する。
【背景技術】
【0002】
障害物を回避する経路の生成や障害物との衝突の防止(軽減)等を行う各種運転支援では、遅延なく高精度に障害物を検出することが重要となる。特許文献1には、レーダセンサを利用して障害物を検出し、自車両の走行進路候補と自車両周辺の障害物との干渉が想定されない安全領域を算出し、安全領域に基づいて運転許可領域を設定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−131838号公報
【特許文献2】特開平10−124799号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
障害物検出方法には、過去の障害物の検出結果も加味するために、一定時間毎に求められる障害物マップ(障害物の存在確率を示したグリッドマップ)を蓄積しておき、最新の障害物マップと過去の障害物マップとの重ね合わせ処理によって最終的な障害物マップを生成する方法がある。レーダセンサで過去に物体が検出されなかった方向においてレーダセンサで新たに物体が検出された場合、過去の障害物マップにおいてその方向の存在確率が0となっているので、重ね合わせ処理ではその存在確率が加味されて新たに検出された物体に対する存在確率が小さくなる。その結果、レーダセンサで新たな物体が検出されているが、検出直後は障害物として検出されず、障害物の検出タイミング早期化の点において改善の余地がある。
【0005】
そこで、本発明は、レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る周辺物体検出装置は、レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報を取得する検知方向情報取得手段と、検知方向情報取得手段で取得した各方向の情報に対して信頼度を付与する信頼度付与手段と、検知方向情報取得手段で取得した各方向の情報と信頼度付与手段で付与した各信頼度に基づいて周辺物体の情報を検出する周辺物体検出手段とを備え、信頼度付与手段は、周辺物体を検知しなかった方向の情報に付与する信頼度を、周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
【0007】
この周辺物体検出装置では、所定時間毎に、レーダセンサで各方向をスキャンし、各方向についてのセンサ情報(特に、反射点についての情報)を検出する。そして、周辺物体検出装置では、検知方向情報取得手段が、そのセンサ情報を用いてレーダセンサでスキャンした各方向(周辺物体を検知した方向、周辺物体を検知しなかった方向)の情報をそれぞれ取得する。さらに、周辺物体検出装置では、信頼度付与手段がレーダセンサでスキャンした各方向の情報に対して信頼度をそれぞれ付与する。この際、周辺物体を検知した方向の情報に対しては、レーダセンサで検出されており、信頼できる情報なので、高い信頼度を付与する。一方、周辺物体を検知しなかった方向の情報に対しては、レーダセンサで検出されていないので、それよりは低い信頼度を付与する。周辺物体検出装置では、所定時間毎に、周辺物体検出手段がレーダセンサでスキャンした各方向の情報とそれに対して付与された各信頼度に基づいて周辺物体の情報を検出する。さらに、周辺物体検出装置では、所定時間毎に得られる今回の検出結果と前回までに得られている過去の検出結果に基づいて最終的な周辺物体の検出結果を取得する。この際、周辺物体が検知されなかった方向(レーダセンサで反射点が得られない方向)の情報に対しては低い信頼度が設定されているので、過去の検出結果において周辺物体が検知されなかった方向についての情報が加味される度合いが低くなる(影響を受け難い)。その結果、過去に周辺物体が検知されなかった方向においてレーダセンサで新たに物体が検知された(反射点が得られた)場合、今回の検出結果と過去の検出結果に基づいて最終的な周辺物体の検出結果を生成しても、遅延なく、新たに検知された物体を最終的な周辺物体の検出結果として得ることができる。このように、周辺物体検出装置では、周辺物体を検知しなかった方向の情報に対しては周辺物体を検知した方向の情報に対する信頼度よりも低い信頼度を付与することにより、過去の検出結果を加味する周辺物体検出において検出性能(特に、検出タイミング)が向上する。
【0008】
本発明の上記周辺物体検出装置では、検知方向情報取得手段は、周辺物体の存在確率を取得し、信頼度付与手段は、周辺物体の存在確率に対する信頼度を付与する構成としてもよい。
【0009】
この周辺物体検出装置では、所定時間毎に、検知方向情報取得手段がレーダセンサでスキャンした各方向における周辺物体の存在確率をそれぞれ取得する。そして、周辺物体検出装置では、信頼度付与手段がレーダセンサでスキャンした各方向についての存在確率に対して信頼度をそれぞれ付与する。この場合、周辺物体が検知されなかった方向の存在確率(最も低い存在確率)に対しては低い信頼度が設定されているので、過去の検出結果において周辺物体が検知されなかった方向については最も低い存在確率が加味される度合いが低くなる。その結果、過去に周辺物体が検知されなかった方向においてレーダセンサで新たに物体が検知された場合、今回の検出結果と過去の検出結果に基づいて最終的な周辺物体の検出結果を生成しても新たに検出された物体に対する存在確率が低くなり難く、遅延なく、新たに検知された物体を最終的な周辺物体の検出結果として得ることができる。
【0010】
本発明の上記周辺物体検出装置では、レーダセンサは、レーザレーダであると好適である。
【発明の効果】
【0011】
本発明によれば、周辺物体を検知しなかった方向の情報に対しては周辺物体を検知した方向の情報に対する信頼度よりも低い信頼度を付与することにより、過去の検出結果を加味する周辺物体検出において検出性能(特に、検出タイミング)が向上する。
【図面の簡単な説明】
【0012】
【図1】本実施の形態に係る障害物検出装置の構成図である。
【図2】遮蔽由来信頼度モデルの一例である。
【図3】遮蔽由来信頼度と存在確率との関係図である。
【図4】障害物マップの一例である。
【図5】本実施の形態に係るEUCにおける処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明に係る周辺物体検出装置の実施の形態を説明する。なお、各図において同一又は相当する要素については同一の符号を付し、重複する説明を省略する。
【0014】
本実施の形態では、本発明の周辺物体検出装置を、車両に搭載される障害物検出装置に適用する。本実施の形態に係る障害物検出装置は、レーザレーダを用いたアクティブセンシングであり、自車両の走行に障害となる物体(例えば、車両、自動二輪車、自転車、歩行者、車両からの落下物、道路工事に関する物体)を検出し、その検出した障害物の存在確率を示す障害物マップを各種運転支援装置(例えば、障害物を回避する経路を生成する装置や障害物との衝突を防止(軽減)する装置)に提供する。本実施の形態に係る障害物検出装置では、一定時間毎に(フレーム毎に)、最新(今回)のフレームの障害物マップと過去のフレームの障害物マップとの重ね合わせ処理によって最終的に提供する障害物マップを生成する。
【0015】
図1〜図4を参照して、本実施の形態に係る障害物検出装置1について説明する。図1は、本実施の形態に係る障害物検出装置の構成図である。図2は、遮蔽由来信頼度モデルの一例である。図3は、遮蔽由来信頼度と存在確率との関係図である。図4は、障害物マップの一例である。
【0016】
障害物検出装置1は、フレーム毎に、レーザレーダによるレーダ情報を用いて反射点(検出点)の情報からなる三次元点群データを生成し、三次元点群データに基づいてレーザレーダの各スキャン方向についての存在確率を演算し、存在確率を示す障害物マップを生成し、最新フレームの障害物マップと過去のフレームの障害物マップによる重ね合わせ処理によって最終的な障害物マップを生成する。特に、障害物検出装置1では、新たに出現した障害物を高性能に検出するために、各スキャン方向についての存在確率に対して信頼度をそれぞれ付与し、反射点が得られていない方向における存在確率に対しては小さい信頼度を付与する。なお、本実施の形態ではレーザレーダによる反射点を三次元として取り扱うが、高さが一定の水平方向の二次元で取り扱ってもよい。
【0017】
障害物検出装置1は、レーザレーダ10、ECU[Electronic Control Unit]20(距離計測部21、存在確率演算部22、障害物マップ生成部23、障害物マップ重ね合わせ部24、存在確率モデルデータベース25、遮蔽由来信頼度モデルデータベース26、時間由来信頼度モデルデータベース27)を備えている。
【0018】
なお、本実施の形態では、レーザレーダ10が特許請求の範囲に記載するレーダセンサに相当し、距離計測部21、存在確率演算部22及び存在確率モデルデータベース25が特許請求の範囲に記載する検知方向情報取得手段に相当し、存在確率演算部22及び遮蔽由来信頼度モデルデータベース26が特許請求の範囲に記載する信頼度付与手段に相当し、障害物マップ生成部23及び障害物マップ重ね合わせ部24が特許請求の範囲に記載する周辺物体検出手段に相当する。
【0019】
レーザレーダ10は、レーダセンサであり、レーザ光を利用して物体を検出する。レーザレーダ10は、自車両の前端部の中央に取り付けられる。レーザレーダ10は、レーザ光の発光部と受光部を水平方向及び鉛直方向に回転させる機構を有している。レーザレーダ10では、フレーム毎に(一定時間毎に)、水平方向に発光部と受光部を回転させるとともに鉛直方向に発光部と受光部を回転させ、レーザ光を各スキャン方向で出射し、反射してきたレーザ光を受光する。スキャンする方法としては、例えば、車両の中心線上の方向角を0°とし、一定角度ずつ方向を変えてスキャンする方法、中心線付近ほど小さい角度で方向を変えてスキャンする方法がる。そして、レーザレーダ10では、フレーム毎に、受光できた各反射点(各検出点)についての情報(水平方向のスキャン方向角、鉛直方向のスキャン方向角、出射時刻、受光時刻、受光強度(反射強度)等)からなるレーダ信号をECU20に送信する。ちなみに、反射が得られない各方向については、物体が存在しないのかあるいは物体は存在するが、物体とレーザ光との相対角度の関係で反射したレーダ光をレーザレーダ10で受光できなかったのかは判らない。なお、二次元の場合、レーザレーダ10では水平方向だけでスキャンし、反射点の情報では水平方向のスキャン方向角だけが得られる。また、1個のレーザレーダ10を備える構成としているが、複数個のレーザレーダ10を備える構成としてもよい。
【0020】
ECU20は、CPU[CentralProcessing Unit]、ROM[Read Only Memory]、RAM[Random Access Memory]等からなる電子制御ユニットであり、障害物検出装置1を統括制御する。ECU20では、ROMに記憶されている障害物検出装置1用のアプリケーションプログラムをRAMにロードしてCPUで実行することにより距離計測部21、存在確率演算部22、障害物マップ生成部23、障害物マップ重ね合わせ部24の各処理部が構成され、存在確率モデルデータベース25、遮蔽由来信頼度モデルデータベース26、時間由来信頼度モデルデータベース27が予め構築されている。ECU20では、フレーム毎に、レーザレーダ10からレーダ信号を受信し、各処理部21,22,23,24での処理を行い、障害物マップを運転支援装置に送信する。
【0021】
距離計測部21では、レーダ信号に含まれる反射点毎に、レーザ光の速度を出射時刻と受光時刻との時間差で除算して反射点までの距離を求める。各反射点の情報には水平方向のスキャン方向角と鉛直方向のスキャン方向角(物体を検知できた方向の情報)が含まれているので、この求められた距離はレーザレーダ10の位置を原点として水平方向のスキャン方向角と鉛直方向のスキャン方向角からなる方向(物体を検知できた方向)における物体までの距離となる。ここでは、全ての反射点についての各反射点の方向における距離情報(レーザレーダ10との相対位置)からなる三次元群データが得られる。ちなみに、レーザレーダ10で反射点が得られていない方向(物体を検知できなかった方向)では、この距離情報は得られない。
【0022】
存在確率演算部22では、距離計測部21で得られた三次元群データに含まれる反射点毎に、その反射点が存在する方向における存在確率を演算する。この演算では、存在確率モデルデータベース25に格納されている存在確率モデルの中から反射点の距離に応じて存在確率モデルを抽出し、その抽出した存在確率モデルを用いて反射点の距離(位置)を基準にして反射点が存在する方向における各距離(各位置)での存在確率を演算する。存在確率モデルデータベース25に格納されている存在確率モデルは、レーザレーダ10(原点)からの距離毎(例えば、1m、3m、5m、10m毎)のモデルが用意されている。存在確率モデルとしては、例えば、反射点の位置を中心(存在確率が最大)として存在確率を正規分布させたモデル、反射点の位置の存在確率を最大とし、その他の位置の存在確率を最小としたモデルがある。存在確率は、例えば、1(最大)〜0(最小)、100[%](最大)〜0[%](最小)で表される。ちなみに、正規分布の存在確率モデルを用いた場合、反射点を検知する際のノイズや反射点のバラツキを抑制した存在確率を設定することができる。
【0023】
また、存在確率演算部22では、レーザレーダ10の検知範囲において三次元群データに含まれる反射点が存在する方向以外の方向(すなわち、反射点が存在しない方向)における存在確率を設定する。ここでは、反射点が存在しない方向における存在確率として最小値を設定する。
【0024】
さらに、存在確率演算部22では、各方向の存在確率に対して遮蔽由来の信頼度を付与する。ここでは、遮蔽由来信頼度モデルデータベース26に格納されている遮蔽由来信頼度モデルの中から反射点の有無に応じて遮蔽由来信頼度モデルを抽出し、その抽出した遮蔽由来信頼度モデルに従って各方向における存在確率に対して遮蔽由来信頼度を付与する。信頼度は、1〜0の値で表され、1が最も信頼度が高く、0が最も信頼度が低い。
【0025】
図2には、遮蔽由来信頼度モデルの一例を示しており、横軸がレーザレーダ10の位置を原点とした距離であり、縦軸が遮蔽由来の信頼度である。図2では、破線B1で示す距離がレーザレーダ10の最大検知距離であり、破線B2がサンプルとなる反射点RPまでの距離である。符号S1で示す遮蔽由来信頼度モデルは、反射点が存在する場合(物体が存在する場合)の信頼度モデルであり、レーザレーダ10から反射点(物体)の前までは物体が存在しないことを100%信じてもよいので、信頼度として最大値の1を設定し、反射点(物体)の後側は物体に遮蔽されていて物体が存在するかは判らないので、信頼度として下限値(0に非常に近い値であり、0でもよい)を設定し、反射点(物体)の位置を基準にして信頼度の最大値から下限値に変化させたモデルである。符号S2で示す遮蔽由来信頼度モデルは、反射点が存在しない場合(物体が存在しないかあるいは物体は存在するがレーザレーダ10に反射光が戻らなかったか不明な場合)の信頼度モデルであり、状況が不明で信頼性は低いので、信頼度として一定の低い値を設定したモデルである。この低い信頼度としては、例えば、信頼度の下限値よりも少し高い値(下限値の1.1倍等)とする。
【0026】
なお、各方向における存在確率に対して遮蔽由来信頼度をそれぞれ付与するだけでなく、方向の各位置での存在確率に対して遮蔽由来信頼度を加味した存在確率を演算しておいてもよい。例えば、図3に示すように、反射点が存在する方向における存在確率(正規分布の存在確率)Pとその方向における存在確率に対して付与された信頼度Sの場合、その方向の各位置(各距離)の存在確率と信頼度とをそれぞれ乗算すると、反射点の前後では正規分布の存在確率が鈍されて、正規分布の凸状よりも緩やかに変化する存在確率となる。
【0027】
障害物マップ生成部23では、存在確率演算部22で演算した各方向における存在確率及び付与した遮蔽由来信頼度を用いて、グリッドマップの各グリッドに存在確率と信頼度を貼り付け、障害物マップを生成する。障害物マップは、レーザレーダ10の位置を基準にして左右及び前方に設定した平面上に形成される格子状の多数のグリッドからなるマップであり、各グリッドに少なくとも存在確率が貼り付けられる。障害物マップでは、グリッドの存在確率が高いほどその位置に障害物が存在する可能性が高いことを示す。障害物マップは、1つのマップでもよいし、鉛直方向における各方向に応じた複数のマップでもよい。図4には、障害物マップGMの一例を示しており、反射点が存在するある方向Dにおいて反射点の位置を中心にして正規分布の存在確率が演算されている場合、障害物マップGMのグリッドG1には大きい存在確率及び大きい遮蔽由来信頼度が貼り付けられ、その前後のグリッドG2,G3にはそれより小さい存在確率及び小さい遮蔽由来信頼度が貼り付けられ、方向Dにおける存在確率が0かつ反射点の前側に対応する各グリッドには0の存在確率及び最大値の遮蔽由来信頼度が貼り付けられ、方向Dにおける存在確率が0かつ反射点の後側に対応する各グリッドには0の存在確率及び下限値の遮蔽由来信頼度が貼り付けられる。ただし、遮蔽由来信頼度がある閾値を下回った場合、そのグリッドの存在確率は0.5(物体があるかどうか不明の領域)として扱う。障害物マップ生成部23では、フレーム毎に最新の障害物マップを生成すると、ECU20内のRAMの所定の領域にその障害物マップを蓄積しておく。この蓄積される障害物マップは障害物マップ重ね合わせ部24で用いられ、障害物マップ重ね合わせ部24で用いられる過去のフレーム数分の障害物マップが順次蓄積される。なお、存在確率演算部22で各位置での存在確率に対して遮蔽由来信頼度を加味した存在確率を演算している場合には、その遮蔽由来信頼度が加味された存在確率をグリッドマップの各グリッドに貼り付ける。
【0028】
障害物マップ重ね合わせ部24では、障害物マップ生成部23で生成した最新の障害物マップと蓄積されている過去の数フレーム分(あるいは、数10フレーム分)の障害物マップとを重ね合わせ、最終的に提供する障害物マップを生成する。ここでは、時間由来信頼度モデルデータベース27に格納されている時間由来信頼度モデルの中から時間由来信頼度モデルを抽出し、その抽出した時間由来信頼度モデルの各時間のフレームに対する信頼度に従って、最新の障害物マップの各グリッドの存在確率に対して過去の各フレームの障害物マップにおける対応するグリッドの存在確率を加味して存在確率をそれぞれ演算する。時間由来信頼度モデルデータベース27に格納されている時間由来信頼度モデルとしては、例えば、過去のフレームほど加味度合いを少なくしたモデル(最新のフレームが最大の信頼度、最も過去のフレームが最小の信頼度となるモデル)がある。さらに、障害物マップには各グリッドに遮蔽由来信頼度が貼り付けられているので、上記のグリッド毎の存在確率の演算において、遮蔽由来信頼度も加味し、存在確率を演算する。したがって、グリッド毎に、最新のフレームの存在確率と時間由来信頼度及び遮蔽由来信頼度と、過去の各フレームの存在確率と時間由来信頼度及び遮蔽由来信頼度とを用いて最終的な存在確率を演算し、その存在確率を障害物マップの各グリッドに貼り付ける。
【0029】
ここで、遮蔽由来信頼度を導入することによって、過去に反射点が得られなかった方向において最新のフレームで反射点が得られた場合に、最終的な障害物マップにおいてその反射点が得られた位置のグリッドで高い存在確率となる例を示す。この例では、説明を簡単にするために、重ね合わせ処理に用いる過去のフレームを1フレームだけとし、最新のフレームと過去のフレームの時間由来信頼度は共に1とする(従って、以下の式では時間由来信頼度については省略する)。最新のフレームでは、反射点が得られたので、反射点の位置のグリッドの遮蔽由来信頼度C1を1とし、存在確率P1を1とする。過去のフレームでは、反射点が得られていないので、その対応するグリッドの遮蔽由来信頼度C0を0.05とし、存在確率P0を0とする。この場合、そのグリッドの最終的な存在確率は、重ね合わせ処理の演算で((P0×C0)+(P1×C1))/(C0+C1)=約0.95となる。このように、新たに反射点を検知した直後から高い存在確率を得ることができ、遅れることなく障害物として検出される。しかし、従来は、遮蔽由来信頼度が考慮されていないので、上記のような例の場合にはC1とC0を共に1として重ね合わせ処理を行う。この場合、そのグリッドの最終的な存在確率は、重ね合わせ処理の演算で((P0×C0)+(P1×C1))/(C0+C1)=0.5となる。このように、新たに反射点を検知した直後は低い存在確率しか得られず、フレームを重ねるごとに徐々に存在確率が高くなり、遅れて障害物として検出される。
【0030】
このように、障害物検出装置1では過去に反射点が得られていなかった(物体が検知されていなかった)方向に対しては低い遮蔽由来信頼度が設定されているので、過去のフレームの障害物マップにおいて反射点が得られなかった方向についての存在確率の0が加味される度合いが低くなる(存在確率の0の影響を受け難い)。その結果、過去に反射点が得られなかった方向においてレーザレーダ10で新たに反射点が得られた場合、最新のフレームの障害物マップと過去のフレームの障害物マップに基づいて最終的な障害物マップを生成しても、遅延なく、新たに得られた反射点において存在確率が高くなる最終的な障害物マップを得ることができる。
【0031】
図1〜図4を参照して、障害物検出装置1における動作について説明する。特に、ECU20における処理について図5のフローチャートに沿って説明する。図5は、本実施の形態に係るEUCにおける処理の流れを示すフローチャートである。障害物検出装置1では、下記に説明する動作をフレーム毎に繰り返し行う。
【0032】
レーザレーダ10では、フレーム毎に、水平方向及び鉛直方向における各スキャン方向においてレーザ光を出射するとともにその反射光を受光する。そして、レーザレーダ10では、受光できた各反射点についての情報をレーダ信号としてECU20に送信する。
【0033】
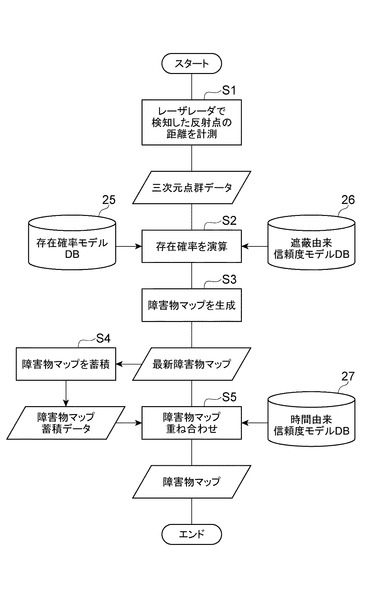
フレーム毎に、ECU20では、受信したレーダ信号に基づいて、レーザレーダ10で検知した各反射点までの距離をそれぞれ計測(演算)する(S1)。ここで、最新のフレームで検知できた反射点の情報からなる三次元群データが得られる。
【0034】
EUU20では、三次元群データに含まれる反射点毎に、その反射点までの距離に応じて存在確率モデルデータベース25から存在確率モデルを抽出し、その存在確率モデルを用いて反射点が得られた方向における存在確率を演算する(S2)。さらに、EUU20では、遮蔽由来信頼度モデルデータベース26から反射点の有無に応じて遮蔽由来信頼度モデルを抽出し、その遮蔽由来信頼度モデルを用いて各方向における存在確率に対して遮蔽由来信頼度を付与する(S2)。ここで、遮蔽由来信頼度を加味した存在確率を演算してもよい。そして、ECU20では、各方向における存在確率と信頼度を用いて、最新の障害物マップを生成する(S3)。さらに、ECU20では、その最新の障害物マップを蓄積しておく(S4)。
【0035】
ECU20では、時間由来信頼度モデルデータベース27から時間由来信頼度モデルを抽出し、最新の障害物マップと蓄積されている過去のフレームの障害物マップとを時間由来信頼度モデルの各時間のフレームの時間由来信頼度及び各グリッドの遮蔽由来信頼度に従って重ね合わせ、最終的な障害物マップを生成する(S5)。そして、ECU20では、その最終的な障害物マップを運転支援装置に送信する。
【0036】
この障害物検出装置1によれば、遮蔽由来信頼度を導入し、各方向における存在確率に対して遮蔽由来信頼度を付与することにより、障害物の検出性能が向上する。特に、障害物検出装置1によれば、レーザレーダ10で反射点が得られていない方向における存在確率(最小値の0)に対する遮蔽由来信頼度を低い値とすることにより、その方向で新たに反射点が得られた場合に反射点が得られた直後から重ね合わせ処理後の存在確率を高くすることができ、遅延なく障害物を検出することができる。
【0037】
以上、本発明に係る実施の形態について説明したが、本発明は上記実施の形態に限定されることなく様々な形態で実施される。
【0038】
例えば、本実施の形態では自車両の走行に障害となる障害物検出装置に適用したが、自車両周辺の歩行者を検出する歩行者検出装置、自車両周辺の車両を検出する他車両検出装置等に他の周辺物体検出装置にも適用できる。
【0039】
また、本実施の形態ではレーダセンサとしてレーザレーダを適用したが、ミリ波レーダ等の他のレーダセンサを適用してもよい。
【0040】
また、本実施の形態では過去の障害物マップと最新の障害物マップとの重ね合せ処理によって最終的な障害物マップを生成する構成としたが、周辺物体の過去の検出結果と最新(今回)の検出結果に基づいて周辺物体を検出する方法については他の方法でもよい。
【0041】
また、本実施の形態では障害物の存在情報として存在確率を用いたが、他の情報を用いてもよい。例えば、存在するか否かの0/1の情報がある。
【符号の説明】
【0042】
1…障害物検出装置、10…レーザレーダ、20…ECU、21…距離計測部、22…存在確率演算部、23…障害物マップ生成部、24…障害物マップ重ね合わせ部、25…存在確率モデルデータベース、26…遮蔽由来信頼度モデルデータベース、27…時間由来信頼度モデルデータベース。
【特許請求の範囲】
【請求項1】
レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、
前記レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報を取得する検知方向情報取得手段と、
前記検知方向情報取得手段で取得した各方向の情報に対して信頼度を付与する信頼度付与手段と、
前記検知方向情報取得手段で取得した各方向の情報と前記信頼度付与手段で付与した各信頼度に基づいて周辺物体の情報を検出する周辺物体検出手段と、
を備え、
前記信頼度付与手段は、周辺物体を検知しなかった方向の情報に付与する信頼度を、周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする周辺物体検出装置。
【請求項2】
前記検知方向情報取得手段は、周辺物体の存在確率を取得し、
前記信頼度付与手段は、周辺物体の存在確率に対する信頼度を付与することを特徴とする請求項1に記載の周辺物体検出装置。
【請求項3】
前記レーダセンサは、レーザレーダであることを特徴とする請求項1又は請求項2に記載の周辺物体検出装置。
【請求項1】
レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、
前記レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報を取得する検知方向情報取得手段と、
前記検知方向情報取得手段で取得した各方向の情報に対して信頼度を付与する信頼度付与手段と、
前記検知方向情報取得手段で取得した各方向の情報と前記信頼度付与手段で付与した各信頼度に基づいて周辺物体の情報を検出する周辺物体検出手段と、
を備え、
前記信頼度付与手段は、周辺物体を検知しなかった方向の情報に付与する信頼度を、周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする周辺物体検出装置。
【請求項2】
前記検知方向情報取得手段は、周辺物体の存在確率を取得し、
前記信頼度付与手段は、周辺物体の存在確率に対する信頼度を付与することを特徴とする請求項1に記載の周辺物体検出装置。
【請求項3】
前記レーダセンサは、レーザレーダであることを特徴とする請求項1又は請求項2に記載の周辺物体検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−101485(P2013−101485A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244707(P2011−244707)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]