
周辺監視装置および周辺監視方法
【課題】自車が他車の死角領域内で走行中であることを運転者に意識させて運転者に注意を促すことができる「周辺監視装置および周辺監視方法」を提供する。
【解決手段】自車の周辺に存在する他車に対する自車の相対的な位置を検出する位置検出部11と、他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部12と、警告発生対象領域内に自車が存在するか否かを判定する存在判定部13と、警告発生対象領域内に自車が存在すると判定された場合に警告を発する警告発生部14とを備え、自車視点による自車の死角ではなく、他車視点による他車の死角を含む警告発生対象領域を自車にて検出し、当該対象領域を用いて警告発生の必要性を判定することにより、走行中の自車が他車の死角に入ったときに警告が発せられるようにする。
【解決手段】自車の周辺に存在する他車に対する自車の相対的な位置を検出する位置検出部11と、他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部12と、警告発生対象領域内に自車が存在するか否かを判定する存在判定部13と、警告発生対象領域内に自車が存在すると判定された場合に警告を発する警告発生部14とを備え、自車視点による自車の死角ではなく、他車視点による他車の死角を含む警告発生対象領域を自車にて検出し、当該対象領域を用いて警告発生の必要性を判定することにより、走行中の自車が他車の死角に入ったときに警告が発せられるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は周辺監視装置および周辺監視方法に関し、特に、自車の周辺を走行中の他車の存在を監視してユーザに報知する技術に関するものである。
【背景技術】
【0002】
従来、自車周辺の状況を検出してユーザに報知する技術として、自車の左右側方の位置に発生する運転者の死角領域をカメラで撮影し、撮影した画像に基づいて死角領域に存在する他車を検出して、運転者に対して当該他車の存在を報知する技術が知られている。なお、本出願人は、運転者の位置や姿勢、同乗者の有無などに応じて、監視対象とする領域(カメラの撮影領域)を実際に運転者の死角となる領域に適正に設定する技術について特許出願をしている(特許文献1)。
【特許文献1】特願2006−311119号 上記特許文献1に記載の技術は、自車から見た視点(以下、自車視点と称する)を基準として自車の死角領域に他車が存在するか否かを監視し、当該死角領域内に他車が存在する場合に自車に対して報知を行うものである。したがって、死角領域における他車の存在が報知された場合に、自車の運転者は、他車の存在に注意しながら車線変更を行うことが可能となる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の技術では、自車が車線変更しようとするときに自車の死角領域に入る他車の存在について運転者に注意を促すことはできても、他車の死角領域に自車が存在する場合に他車が急に車線変更してくるかもしれないことを運転者に意識させることはできない。
【0004】
本発明は、このような問題を解決するために成されたものであり、自車が他車の死角領域内で走行中であることを運転者に意識させ、走行の注意を運転者に促すことができるようにすることを目的とする。
【課題を解決するための手段】
【0005】
上記した課題を解決するために、本発明では、他車の運転者の視点を基準とした他車の死角を含む警告発生対象領域を検出して自車がその領域内に存在するか否かを監視し、当該領域内に自車の少なくとも一部が存在することが検知された場合に警告を発生するようにしている。
【発明の効果】
【0006】
上記のように構成した本発明によれば、自車視点による自車の死角ではなく、他車から見た視点(以下、他車視点と称する)による他車の死角を含む警告発生対象領域が自車にて検出され、当該対象領域を用いて警告発生の必要性が判定される。これにより、走行中の自車が他車の死角に入ると、そのことが検知されて警告が発せられることとなる。その結果、自車が他車の死角領域内で走行中であることを運転者に意識させ、走行の注意を運転者に促すことができる。
【発明を実施するための最良の形態】
【0007】
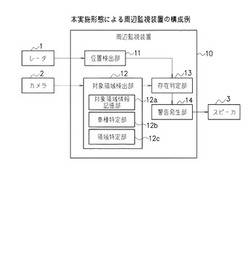
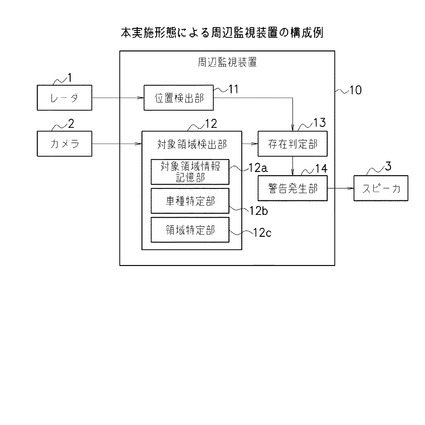
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態による周辺監視装置の構成例を示すブロック図である。図1に示すように、本実施形態の周辺監視装置10は、例えばCPU、ROM、RAMなどを備えたマイクロコンピュータを備えて構成され、その機能構成として、位置検出部11、対象領域検出部12、存在判定部13および警告発生部14を備えている。
【0008】
位置検出部11は、自車の所定箇所に設置されたレーダ1等のセンサから出力される信号を用いて、自車の周辺に他車が存在するか否かを監視する。そして、他車の存在が確認された場合に、他車に対する自車の相対的な位置を検出する。本実施形態では、例えば自車の車両前部および左右側部に複数のレーダ1を設置して、少なくとも自車より斜め前方に走行中の他車の存在を監視できるようにする。
【0009】
レーダ1は、自ら電波を発射し、その反射波を受信することにより、他車の存在を確認することができる。また、とらえた反射波の方向と、電波を発射してから反射波を受信するまでの時間差とをもとに、自車から他車までの距離と方位(この距離と方位は、自車に対する他車の相対的な位置に相当する)を正確に測定することができる。位置検出部11は、レーダ1がとらえた他車の相対位置をもとに、他車に対する自車の相対位置を特定する。
【0010】
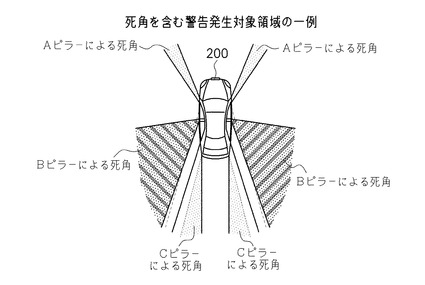
対象領域検出部12は、他車の運転者にとっての死角を含む警告発生対象領域を検出する。図2は、警告発生対象領域の一例を説明するための図である。図2において、200は他車を示す。また、ドット状のハッチングが入っている領域は他車の死角を示し、それ以外は死角でないことを示している。死角でない領域のうち、点線で挟まれた領域はサイドミラーで見ることが可能な領域である。
【0011】
本実施形態において、警告発生対象領域は、他車200の車両が備えるBピラー(車両側面の窓を前部後部に隔てる柱、すなわち、前ドアと後ドアとの間にある柱を言う)によって、他車200の運転者から見て死角となる領域とする。図2では、斜線を引いた領域がこの警告発生対象領域に相当する。
【0012】
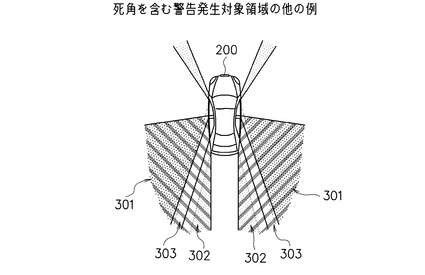
なお、警告発生対象領域は、この図2の例に限定されない。例えば図3に示すように、Bピラーにより死角となる第1領域301、Cピラー(後ドアガラスとリヤガラスとの間にある柱)により死角となる第2領域302および、第1領域301と第2領域302との間に挟まれる第3領域303で特定される領域であっても良い。第3領域303は、ピラーによって死角となる領域ではなく、運転者が車両側面の後部窓を通して目視することが可能な領域である。しかし、図3に示されるように、目視可能とは言っても第3領域303は比較的狭く、運転者が目視で見にくい領域であるので、ここも警告発生対象領域とすることは有意義である。
【0013】
また、図3に示す第1領域301および第3領域303で特定される領域を警告発生対象領域としても良い。すなわち、Cピラーにより死角となる第2領域302に自車が存在しても、自車はまだ他車に対してあまり接近していないので、第2領域302は警告発生対象領域から外しても良い。
【0014】
対象領域検出部12は、上述した警告発生対象領域を検出するための構成として、対象領域情報記憶部12a、車種特定部12bおよび領域特定部12cを備えている。対象領域情報記憶部12aは、車種毎に異なる警告発生対象領域を表す領域情報を記憶した記録媒体である。ピラーの形状や位置は車種毎に異なるので、他車視点の死角も当然ながら車種毎に異なる。そこで、対象領域情報記憶部12aは、警告発生対象領域の場所を表す領域情報を車種別に記憶している。
【0015】
車種特定部12bは、カメラ2により撮影された自車周辺の画像データを用いて画像認識処理することにより、画像内に写っている他車の車種を特定する。本実施形態では、例えば自車の車両前部および左右側部に複数のカメラ2を設置して、少なくとも自車より斜め前方の車両周辺を撮影できるようにする。このため、自車の周辺で斜め前方に他車が存在すれば、他車を含む画像がカメラ2によって撮影される。車種特定部12bは、カメラ2から出力される画像データを用いて画像認識処理することにより、自車の周辺に存在する他車の車種を特定する。なお、画像認識処理により他車の車種を特定する手法としては、車種毎に用意した比較用の画像データを用いてパターンマッチングや特徴点マッチングを行う方法など、公知の手法を適用することが可能である。
【0016】
領域特定部12cは、車種特定部12bにより特定された車種に基づいて対象領域情報記憶部12aを参照し、車種特定部12bにより特定された車種に対応するに領域情報を読み出すことによって警告発生対象領域を特定する。
【0017】
存在判定部13は、位置検出部11により検出された自車の位置(他車から見た自車の相対位置)および対象領域検出部12により検出された警告発生対象領域に基づいて、警告発生対象領域内に自車が存在するか否かを判定する。警告発生部14は、存在判定部13により警告発生対象領域内に自車が存在すると判定された場合に、例えばスピーカ3を通して音声による警告を発する。
【0018】
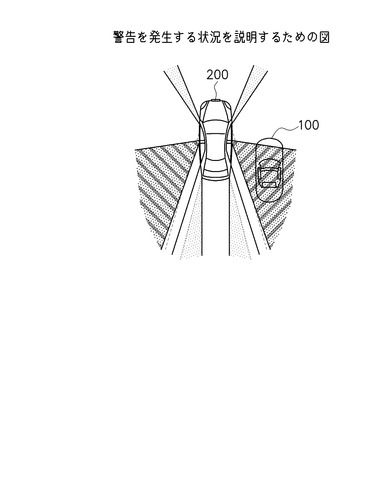
ここで、警告発生部14は、警告発生対象領域内に自車の全体が存在する場合に限って警告を発するようにしても良いが、警告発生対象領域内に自車の少なくとも一部が存在する場合に警告を発するのが好ましい。より具体的には、自車の少なくとも前端が警告発生対象領域内に存在すると判定された場合に警告を発するのが好ましい。これによれば、図4に示すように、自車100の一部が警告発生対象領域内に存在していても、前端が警告発生対象領域の外に出ていれば、警告発生部14は警告を発生しない。すなわち、自車100の前端が警告発生対象領域の外に出ているということは、他車200の運転席から比較的見やすい位置に自車の前部が存在していることであるので、特に警告を発生する必要がない。
【0019】
なお、警告は、スピーカ3に対する警告音の出力という形態に限定されるものではない。例えば、スピーカ3に対するアナウンス音声の出力であっても良いし、ディスプレイ装置(図示せず)に対するメッセージの出力であっても良い。また、単なるメッセージではなく、位置検出部11により検出された自車の位置と対象領域検出部12により検出された警告発生対象領域との位置関係を示す画像情報をディスプレイ装置に出力するようにしても良い。ただし、警告を受ける自車も走行中であることに鑑みて、警告音またはアナウンス音声による警告の方が好ましく、画像出力を行う場合も音声出力を伴うのが好ましい。
【0020】
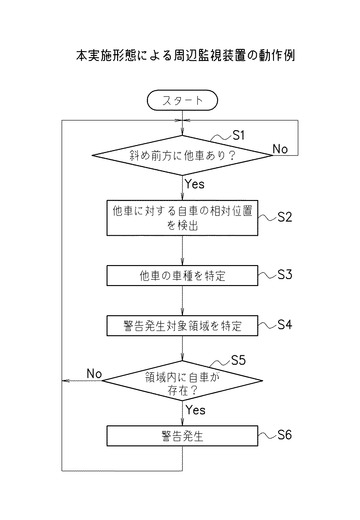
次に、上記のように構成した本実施形態による周辺監視装置10の動作を説明する。図5は、本実施形態による周辺監視装置10の動作例を示すフローチャートである。なお、図5のフローチャートに示す動作は、周辺監視装置10の電源がオンとなっている間は継続して実行される。
【0021】
図5において、位置検出部11は、レーダ1から出力される信号に基づいて、自車の周辺で斜め前方に他車が存在するか否かを監視する(ステップS1)。ここで、自車の斜め前方に他車が存在することが検出された場合、位置検出部11は更に、その他車に対する自車の相対的な位置を検出する(ステップS2)。また、対象領域検出部12は、カメラ2から出力される画像データを用いて画像認識処理することにより、他車の車種を特定する(ステップS3)。そして、対象領域検出部12は、その特定した車種に対応する警告発生対象領域を対象領域情報記憶部12aから読み出すことによって特定する(ステップS4)。
【0022】
次に、存在判定部13は、ステップS2で位置検出部11により検出された自車の相対位置と、ステップS3,S4で対象領域検出部12により検出された警告発生対象領域とに基づいて、警告発生対象領域内に自車の前端が存在するか否かを判定する(ステップS5)。ここで、自車の前端が警告発生対象領域内に存在すると存在判定部13により判定された場合、警告発生部14は警告を発生する(ステップS6)。
【0023】
一方、自車の前端が警告発生対象領域の外に存在すると存在判定部13により判定された場合は、ステップS1の処理に戻る。また、ステップS6で警告発生部14が警告を発生した後も、ステップS1の処理に戻る。自車と他車は共に走行中であり、両車の相対位置関係は時々刻々と変化している。そのため、ステップS1〜S6の処理を繰り返し行うことにより、時々刻々と変化する自車と他車との相対位置関係に応じて適切に警告を発生させることができる。
【0024】
以上詳しく説明したように、本実施形態では、他車視点による他車の死角を含む警告発生対象領域を検出し、自車がその警告発生対象領域内に存在するか否かを監視して、当該警告発生対象領域内に自車の少なくとも一部が存在することが検知された場合に警告を発生するようにしている。これにより、走行中の自車が他車の死角に入っていると、そのことが検知されて警告が発せられるので、自車が他車の死角領域内で走行中であることを自車の運転者に意識させ、走行の注意を運転者に促すことができる。
【0025】
また、本実施形態では、他車の車種を検出して、その車種に応じた警告発生対象領域を特定するようにしている。本発明は車種によらず一律の警告発生対象領域を設定する場合にも適用可能であるが、車種毎に異なる警告発生対象領域を特定することにより、警告発生の対象とする死角領域を車種に応じて適正に設定することができる。
【0026】
なお、上記実施形態では、位置検出部11がレーダ1から出力される信号に基づいて自車周辺の他車を監視する例について説明したが、これに限定されない。例えば、カメラ2より出力される画像データを画像認識処理し、画像内に車両が写っているか否かによって自車周辺の他車を監視するようにしても良い。
【0027】
また、上記実施形態では、警告発生対象領域内に自車が入っているときに、その旨の警告を発生する例について説明したが、これに限定されない。例えば、自車が警告発生対象領域内に入っていて、しかも自車が他車に接近中であるか否かを判定する。そして、この条件を満たすと判定したときに警告を発生するようにしても良い。
【0028】
また、上記実施形態では、警告発生対象領域内に自車が入っていれば常に警告を発生するが、自車の速度が所定の速度以上の場合に限って警告を発生するようにしても良い。例えば、自車の速度が所定の速度以上の場合に限り、警告発生対象領域を検出するようにしても良い。このようにすれば、信号待ちで停車中のときや、駐車場へ自車を駐車させるときなどに無駄な警告を発生しないようにすることができる。
【0029】
また、上記実施形態では、警告発生対象領域内に自車が入っていたときに自車に警告を発生する例について説明したが、これに限定されない。例えば、自車および他車の双方が車々間通信のための車載機を搭載している場合は、自車から他車に対して車々間通信で警告要求を送信し、他車に警告を発生するようにしても良い。この場合、他車のみに警告を発生するようにしても良いし、自車および他車の双方に警告を発生するようにしても良い。
【0030】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態による周辺監視装置の構成例を示すブロック図である。
【図2】本実施形態による警告発生対象領域の一例を示す図である。
【図3】本実施形態による警告発生対象領域の他の例を示す図である。
【図4】本実施形態において警告を発生する状況の説明図である。
【図5】本実施形態による周辺監視装置の動作例を示すフローチャートである。
【符号の説明】
【0032】
1 レーダ
2 カメラ
3 スピーカ
10 周辺監視装置
11 位置検出部
12 対象領域検出部
12a 対象領域情報記憶部
12b 車種特定部
12c 領域特定部
13 存在判定部
14 警告発生部
【技術分野】
【0001】
本発明は周辺監視装置および周辺監視方法に関し、特に、自車の周辺を走行中の他車の存在を監視してユーザに報知する技術に関するものである。
【背景技術】
【0002】
従来、自車周辺の状況を検出してユーザに報知する技術として、自車の左右側方の位置に発生する運転者の死角領域をカメラで撮影し、撮影した画像に基づいて死角領域に存在する他車を検出して、運転者に対して当該他車の存在を報知する技術が知られている。なお、本出願人は、運転者の位置や姿勢、同乗者の有無などに応じて、監視対象とする領域(カメラの撮影領域)を実際に運転者の死角となる領域に適正に設定する技術について特許出願をしている(特許文献1)。
【特許文献1】特願2006−311119号 上記特許文献1に記載の技術は、自車から見た視点(以下、自車視点と称する)を基準として自車の死角領域に他車が存在するか否かを監視し、当該死角領域内に他車が存在する場合に自車に対して報知を行うものである。したがって、死角領域における他車の存在が報知された場合に、自車の運転者は、他車の存在に注意しながら車線変更を行うことが可能となる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の技術では、自車が車線変更しようとするときに自車の死角領域に入る他車の存在について運転者に注意を促すことはできても、他車の死角領域に自車が存在する場合に他車が急に車線変更してくるかもしれないことを運転者に意識させることはできない。
【0004】
本発明は、このような問題を解決するために成されたものであり、自車が他車の死角領域内で走行中であることを運転者に意識させ、走行の注意を運転者に促すことができるようにすることを目的とする。
【課題を解決するための手段】
【0005】
上記した課題を解決するために、本発明では、他車の運転者の視点を基準とした他車の死角を含む警告発生対象領域を検出して自車がその領域内に存在するか否かを監視し、当該領域内に自車の少なくとも一部が存在することが検知された場合に警告を発生するようにしている。
【発明の効果】
【0006】
上記のように構成した本発明によれば、自車視点による自車の死角ではなく、他車から見た視点(以下、他車視点と称する)による他車の死角を含む警告発生対象領域が自車にて検出され、当該対象領域を用いて警告発生の必要性が判定される。これにより、走行中の自車が他車の死角に入ると、そのことが検知されて警告が発せられることとなる。その結果、自車が他車の死角領域内で走行中であることを運転者に意識させ、走行の注意を運転者に促すことができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態による周辺監視装置の構成例を示すブロック図である。図1に示すように、本実施形態の周辺監視装置10は、例えばCPU、ROM、RAMなどを備えたマイクロコンピュータを備えて構成され、その機能構成として、位置検出部11、対象領域検出部12、存在判定部13および警告発生部14を備えている。
【0008】
位置検出部11は、自車の所定箇所に設置されたレーダ1等のセンサから出力される信号を用いて、自車の周辺に他車が存在するか否かを監視する。そして、他車の存在が確認された場合に、他車に対する自車の相対的な位置を検出する。本実施形態では、例えば自車の車両前部および左右側部に複数のレーダ1を設置して、少なくとも自車より斜め前方に走行中の他車の存在を監視できるようにする。
【0009】
レーダ1は、自ら電波を発射し、その反射波を受信することにより、他車の存在を確認することができる。また、とらえた反射波の方向と、電波を発射してから反射波を受信するまでの時間差とをもとに、自車から他車までの距離と方位(この距離と方位は、自車に対する他車の相対的な位置に相当する)を正確に測定することができる。位置検出部11は、レーダ1がとらえた他車の相対位置をもとに、他車に対する自車の相対位置を特定する。
【0010】
対象領域検出部12は、他車の運転者にとっての死角を含む警告発生対象領域を検出する。図2は、警告発生対象領域の一例を説明するための図である。図2において、200は他車を示す。また、ドット状のハッチングが入っている領域は他車の死角を示し、それ以外は死角でないことを示している。死角でない領域のうち、点線で挟まれた領域はサイドミラーで見ることが可能な領域である。
【0011】
本実施形態において、警告発生対象領域は、他車200の車両が備えるBピラー(車両側面の窓を前部後部に隔てる柱、すなわち、前ドアと後ドアとの間にある柱を言う)によって、他車200の運転者から見て死角となる領域とする。図2では、斜線を引いた領域がこの警告発生対象領域に相当する。
【0012】
なお、警告発生対象領域は、この図2の例に限定されない。例えば図3に示すように、Bピラーにより死角となる第1領域301、Cピラー(後ドアガラスとリヤガラスとの間にある柱)により死角となる第2領域302および、第1領域301と第2領域302との間に挟まれる第3領域303で特定される領域であっても良い。第3領域303は、ピラーによって死角となる領域ではなく、運転者が車両側面の後部窓を通して目視することが可能な領域である。しかし、図3に示されるように、目視可能とは言っても第3領域303は比較的狭く、運転者が目視で見にくい領域であるので、ここも警告発生対象領域とすることは有意義である。
【0013】
また、図3に示す第1領域301および第3領域303で特定される領域を警告発生対象領域としても良い。すなわち、Cピラーにより死角となる第2領域302に自車が存在しても、自車はまだ他車に対してあまり接近していないので、第2領域302は警告発生対象領域から外しても良い。
【0014】
対象領域検出部12は、上述した警告発生対象領域を検出するための構成として、対象領域情報記憶部12a、車種特定部12bおよび領域特定部12cを備えている。対象領域情報記憶部12aは、車種毎に異なる警告発生対象領域を表す領域情報を記憶した記録媒体である。ピラーの形状や位置は車種毎に異なるので、他車視点の死角も当然ながら車種毎に異なる。そこで、対象領域情報記憶部12aは、警告発生対象領域の場所を表す領域情報を車種別に記憶している。
【0015】
車種特定部12bは、カメラ2により撮影された自車周辺の画像データを用いて画像認識処理することにより、画像内に写っている他車の車種を特定する。本実施形態では、例えば自車の車両前部および左右側部に複数のカメラ2を設置して、少なくとも自車より斜め前方の車両周辺を撮影できるようにする。このため、自車の周辺で斜め前方に他車が存在すれば、他車を含む画像がカメラ2によって撮影される。車種特定部12bは、カメラ2から出力される画像データを用いて画像認識処理することにより、自車の周辺に存在する他車の車種を特定する。なお、画像認識処理により他車の車種を特定する手法としては、車種毎に用意した比較用の画像データを用いてパターンマッチングや特徴点マッチングを行う方法など、公知の手法を適用することが可能である。
【0016】
領域特定部12cは、車種特定部12bにより特定された車種に基づいて対象領域情報記憶部12aを参照し、車種特定部12bにより特定された車種に対応するに領域情報を読み出すことによって警告発生対象領域を特定する。
【0017】
存在判定部13は、位置検出部11により検出された自車の位置(他車から見た自車の相対位置)および対象領域検出部12により検出された警告発生対象領域に基づいて、警告発生対象領域内に自車が存在するか否かを判定する。警告発生部14は、存在判定部13により警告発生対象領域内に自車が存在すると判定された場合に、例えばスピーカ3を通して音声による警告を発する。
【0018】
ここで、警告発生部14は、警告発生対象領域内に自車の全体が存在する場合に限って警告を発するようにしても良いが、警告発生対象領域内に自車の少なくとも一部が存在する場合に警告を発するのが好ましい。より具体的には、自車の少なくとも前端が警告発生対象領域内に存在すると判定された場合に警告を発するのが好ましい。これによれば、図4に示すように、自車100の一部が警告発生対象領域内に存在していても、前端が警告発生対象領域の外に出ていれば、警告発生部14は警告を発生しない。すなわち、自車100の前端が警告発生対象領域の外に出ているということは、他車200の運転席から比較的見やすい位置に自車の前部が存在していることであるので、特に警告を発生する必要がない。
【0019】
なお、警告は、スピーカ3に対する警告音の出力という形態に限定されるものではない。例えば、スピーカ3に対するアナウンス音声の出力であっても良いし、ディスプレイ装置(図示せず)に対するメッセージの出力であっても良い。また、単なるメッセージではなく、位置検出部11により検出された自車の位置と対象領域検出部12により検出された警告発生対象領域との位置関係を示す画像情報をディスプレイ装置に出力するようにしても良い。ただし、警告を受ける自車も走行中であることに鑑みて、警告音またはアナウンス音声による警告の方が好ましく、画像出力を行う場合も音声出力を伴うのが好ましい。
【0020】
次に、上記のように構成した本実施形態による周辺監視装置10の動作を説明する。図5は、本実施形態による周辺監視装置10の動作例を示すフローチャートである。なお、図5のフローチャートに示す動作は、周辺監視装置10の電源がオンとなっている間は継続して実行される。
【0021】
図5において、位置検出部11は、レーダ1から出力される信号に基づいて、自車の周辺で斜め前方に他車が存在するか否かを監視する(ステップS1)。ここで、自車の斜め前方に他車が存在することが検出された場合、位置検出部11は更に、その他車に対する自車の相対的な位置を検出する(ステップS2)。また、対象領域検出部12は、カメラ2から出力される画像データを用いて画像認識処理することにより、他車の車種を特定する(ステップS3)。そして、対象領域検出部12は、その特定した車種に対応する警告発生対象領域を対象領域情報記憶部12aから読み出すことによって特定する(ステップS4)。
【0022】
次に、存在判定部13は、ステップS2で位置検出部11により検出された自車の相対位置と、ステップS3,S4で対象領域検出部12により検出された警告発生対象領域とに基づいて、警告発生対象領域内に自車の前端が存在するか否かを判定する(ステップS5)。ここで、自車の前端が警告発生対象領域内に存在すると存在判定部13により判定された場合、警告発生部14は警告を発生する(ステップS6)。
【0023】
一方、自車の前端が警告発生対象領域の外に存在すると存在判定部13により判定された場合は、ステップS1の処理に戻る。また、ステップS6で警告発生部14が警告を発生した後も、ステップS1の処理に戻る。自車と他車は共に走行中であり、両車の相対位置関係は時々刻々と変化している。そのため、ステップS1〜S6の処理を繰り返し行うことにより、時々刻々と変化する自車と他車との相対位置関係に応じて適切に警告を発生させることができる。
【0024】
以上詳しく説明したように、本実施形態では、他車視点による他車の死角を含む警告発生対象領域を検出し、自車がその警告発生対象領域内に存在するか否かを監視して、当該警告発生対象領域内に自車の少なくとも一部が存在することが検知された場合に警告を発生するようにしている。これにより、走行中の自車が他車の死角に入っていると、そのことが検知されて警告が発せられるので、自車が他車の死角領域内で走行中であることを自車の運転者に意識させ、走行の注意を運転者に促すことができる。
【0025】
また、本実施形態では、他車の車種を検出して、その車種に応じた警告発生対象領域を特定するようにしている。本発明は車種によらず一律の警告発生対象領域を設定する場合にも適用可能であるが、車種毎に異なる警告発生対象領域を特定することにより、警告発生の対象とする死角領域を車種に応じて適正に設定することができる。
【0026】
なお、上記実施形態では、位置検出部11がレーダ1から出力される信号に基づいて自車周辺の他車を監視する例について説明したが、これに限定されない。例えば、カメラ2より出力される画像データを画像認識処理し、画像内に車両が写っているか否かによって自車周辺の他車を監視するようにしても良い。
【0027】
また、上記実施形態では、警告発生対象領域内に自車が入っているときに、その旨の警告を発生する例について説明したが、これに限定されない。例えば、自車が警告発生対象領域内に入っていて、しかも自車が他車に接近中であるか否かを判定する。そして、この条件を満たすと判定したときに警告を発生するようにしても良い。
【0028】
また、上記実施形態では、警告発生対象領域内に自車が入っていれば常に警告を発生するが、自車の速度が所定の速度以上の場合に限って警告を発生するようにしても良い。例えば、自車の速度が所定の速度以上の場合に限り、警告発生対象領域を検出するようにしても良い。このようにすれば、信号待ちで停車中のときや、駐車場へ自車を駐車させるときなどに無駄な警告を発生しないようにすることができる。
【0029】
また、上記実施形態では、警告発生対象領域内に自車が入っていたときに自車に警告を発生する例について説明したが、これに限定されない。例えば、自車および他車の双方が車々間通信のための車載機を搭載している場合は、自車から他車に対して車々間通信で警告要求を送信し、他車に警告を発生するようにしても良い。この場合、他車のみに警告を発生するようにしても良いし、自車および他車の双方に警告を発生するようにしても良い。
【0030】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態による周辺監視装置の構成例を示すブロック図である。
【図2】本実施形態による警告発生対象領域の一例を示す図である。
【図3】本実施形態による警告発生対象領域の他の例を示す図である。
【図4】本実施形態において警告を発生する状況の説明図である。
【図5】本実施形態による周辺監視装置の動作例を示すフローチャートである。
【符号の説明】
【0032】
1 レーダ
2 カメラ
3 スピーカ
10 周辺監視装置
11 位置検出部
12 対象領域検出部
12a 対象領域情報記憶部
12b 車種特定部
12c 領域特定部
13 存在判定部
14 警告発生部
【特許請求の範囲】
【請求項1】
自車の周辺に存在する他車に対する前記自車の相対的な位置を検出する位置検出部と、
前記他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部と、
前記位置検出部により検出された前記自車の相対位置および前記対象領域検出部により検出された前記警告発生対象領域に基づいて、前記警告発生対象領域内に前記自車が存在するか否かを判定する存在判定部と、
前記存在判定部により前記自車の少なくとも一部が前記警告発生対象領域内に存在すると判定された場合に、警告を発する警告発生部とを備えたことを特徴とする周辺監視装置。
【請求項2】
前記対象領域検出部は、車種毎に異なる警告発生対象領域を表す領域情報を記憶した対象領域情報記憶部と、
前記自車の周辺に存在する前記他車の車種を特定する車種特定部と、
前記車種特定部により特定された車種に基づいて前記対象領域情報記憶部を参照し、前記車種特定部により特定された車種に対応するに領域情報を読み出すことによって前記警告発生対象領域を特定する領域特定部とを備えたことを特徴とする請求項1に記載の周辺監視装置。
【請求項3】
前記警告発生対象領域は、Bピラーにより死角となる領域であり、
前記警告発生部は、前記存在判定部により前記自車の少なくとも前端が前記警告発生対象領域内に存在すると判定された場合に、警告を発することを特徴とする請求項1に記載の周辺監視装置。
【請求項4】
前記警告発生対象領域は、Bピラーにより死角となる第1領域、Cピラーにより死角となる第2領域および前記第1領域と前記第2領域との間に挟まれる第3領域で特定される領域であり、
前記警告発生部は、前記存在判定部により前記自車の少なくとも前端が前記警告発生対象領域内に存在すると判定された場合に、警告を発することを特徴とする請求項1に記載の周辺監視装置。
【請求項5】
自車の周辺に存在する他車に対する前記自車の相対的な位置を検出する第1のステップと、
前記他車の運転者にとっての死角を含む警告発生対象領域を検出する第2のステップと、
前記第1のステップで検出された前記自車の相対位置および前記第2のステップで検出された前記警告発生対象領域に基づいて、前記警告発生対象領域内に前記自車が存在するか否かを判定する第3のステップと、
前記第3のステップで前記自車の少なくとも一部が前記警告発生対象領域内に存在すると判定された場合に、警告を発する第4のステップとを有することを特徴とする周辺監視方法。
【請求項1】
自車の周辺に存在する他車に対する前記自車の相対的な位置を検出する位置検出部と、
前記他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部と、
前記位置検出部により検出された前記自車の相対位置および前記対象領域検出部により検出された前記警告発生対象領域に基づいて、前記警告発生対象領域内に前記自車が存在するか否かを判定する存在判定部と、
前記存在判定部により前記自車の少なくとも一部が前記警告発生対象領域内に存在すると判定された場合に、警告を発する警告発生部とを備えたことを特徴とする周辺監視装置。
【請求項2】
前記対象領域検出部は、車種毎に異なる警告発生対象領域を表す領域情報を記憶した対象領域情報記憶部と、
前記自車の周辺に存在する前記他車の車種を特定する車種特定部と、
前記車種特定部により特定された車種に基づいて前記対象領域情報記憶部を参照し、前記車種特定部により特定された車種に対応するに領域情報を読み出すことによって前記警告発生対象領域を特定する領域特定部とを備えたことを特徴とする請求項1に記載の周辺監視装置。
【請求項3】
前記警告発生対象領域は、Bピラーにより死角となる領域であり、
前記警告発生部は、前記存在判定部により前記自車の少なくとも前端が前記警告発生対象領域内に存在すると判定された場合に、警告を発することを特徴とする請求項1に記載の周辺監視装置。
【請求項4】
前記警告発生対象領域は、Bピラーにより死角となる第1領域、Cピラーにより死角となる第2領域および前記第1領域と前記第2領域との間に挟まれる第3領域で特定される領域であり、
前記警告発生部は、前記存在判定部により前記自車の少なくとも前端が前記警告発生対象領域内に存在すると判定された場合に、警告を発することを特徴とする請求項1に記載の周辺監視装置。
【請求項5】
自車の周辺に存在する他車に対する前記自車の相対的な位置を検出する第1のステップと、
前記他車の運転者にとっての死角を含む警告発生対象領域を検出する第2のステップと、
前記第1のステップで検出された前記自車の相対位置および前記第2のステップで検出された前記警告発生対象領域に基づいて、前記警告発生対象領域内に前記自車が存在するか否かを判定する第3のステップと、
前記第3のステップで前記自車の少なくとも一部が前記警告発生対象領域内に存在すると判定された場合に、警告を発する第4のステップとを有することを特徴とする周辺監視方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−187424(P2009−187424A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2008−28526(P2008−28526)
【出願日】平成20年2月8日(2008.2.8)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成20年2月8日(2008.2.8)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]