
周辺監視装置
【課題】簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供する。
【解決手段】周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光投影パターンが形成される投影位置と該他車両の位置との位置関係を光投影パターンの大きさに対応させて形成した光投影パターンを検出する、測定手段は、検出手段で検出された光投影パターンの大きさに基づいて、投影位置と他車両との位置関係を測定する。
【解決手段】周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光投影パターンが形成される投影位置と該他車両の位置との位置関係を光投影パターンの大きさに対応させて形成した光投影パターンを検出する、測定手段は、検出手段で検出された光投影パターンの大きさに基づいて、投影位置と他車両との位置関係を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用の周辺監視装置に関し、より特定的には、他車両によって路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置に関する。
【背景技術】
【0002】
従来、他車両が光ビームを照射することによって路面上に形成された光投影パターンを検出することにより、自車両と他車両との衝突可能性を判定する周辺監視装置が存在する。例えば、特許文献1に記載の装置では、自車両及び他車両が光ビームを照射して所定の光投影パターンを路面上に形成し、自車両及び他車両によって形成された光投影パターンをカメラで検知することによって、自車両と他車両との衝突可能性を判定している。具体的には、車両(自車両及び他車両)は、車両の車速、運動状態量、舵角、及び操舵力に基づいて車両が走行すると推定される走行軌道を算出する。次に、その走行軌道を車両が走行した場合に車体が通過する領域を算出し、その領域と車体が通過しない領域との境界線上に光ビームを照射する。これにより、車両は、2本の線状の光投影パターンを路面上に形成する。そして、自車両により路面上に形成された光ビームと他車両により路面上に形成された光投影パターンとが干渉する(線状光ビームが交差する)場合、自車両と他車両とが衝突する可能性があると判定し、運転者に注意を喚起する等の処理を行う。
【特許文献1】特開2003−231450号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記装置では、自車両と他車両との光投影パターンが交差するか否かを判定するために、カメラで撮影した画像を解析する処理等の複雑な処理を行う必要がある。このような複雑な処理を行う場合、処理に時間がかかり衝突判断が遅れる場合や複雑な処理を行うための処理能力の高いハードウェアが必要となりコストが高くなる場合がある。また、自車両と他車両との衝突可能性を精度よく判断するためには、自車両と他車両との位置関係を精度よく測定することが好ましい。
【0004】
それ故、本発明の目的は、簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記課題を解決するために、以下の構成を採用した。すなわち、第1の発明は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光投影パターンが形成される投影位置と該他車両の位置との位置関係を光投影パターンの大きさに対応させて形成した光投影パターンを検出する、測定手段は、検出手段で検出された光投影パターンの大きさに基づいて、投影位置と他車両との位置関係を測定する。
【0006】
この発明によれば、他車両が路面上に形成した光投影パターンを自車両が検出することにより、他車両と該他車両が形成した光投影パターンの投影位置との位置関係を求めることができる。すなわち、他車両は、上記位置関係を光投影パターンの大きさに対応させて、上記光投影パターンを路面上に形成する。自車両は、他車両が形成した光投影パターンの大きさを求める。これにより、自車両は、上記投影位置と他車両との位置関係を求めることができる。
【0007】
本発明において、他車両は、投影位置と他車両との位置関係として該他車両から投影位置までの距離を光投影パターンの大きさに対応させ、他車両から投影位置までの距離と光投影パターンの大きさとの比が一定になるように光ビームを照射してもよい。この場合において、測定手段は、光投影パターンの大きさを測定し、該測定結果に基づいて、他車両から投影位置までの距離を算出する。
【0008】
この構成によれば、他車両から光投影パターンの投影位置までの距離を正確に求めることができる。すなわち、他車両は、他車両から投影位置までの距離と光投影パターンの大きさとの比が一定になるように、光ビームを照射する。これにより、他車両がピッチ運動により上下方向に傾き、光投影パターンの投影位置が変化した場合においても、他車両から投影位置までの距離の変化に応じて光投影パターンの大きさも変化するため、自車両は、光投影パターンの大きさを求めることにより、他車両から投影位置までの距離を正確に求めることができる。
【0009】
本発明において、他車両は、投影位置と他車両との位置関係として該他車両が投影位置に到達するまでの到達時間を光投影パターンの大きさに対応させ、該到達時間と光投影パターンの大きさとの比が一定になるように光ビームを照射してもよい。この場合において、測定手段は、光投影パターンの大きさを測定し、該測定結果に基づいて、到達時間を算出してもよい。
【0010】
この構成によれば、他車両が光投影パターンの投影位置に到達するまでの時間を正確に求めることができる。すなわち、他車両は、他車両が投影位置に到達するまでの時間と光投影パターンの大きさとの比が一定になるように、光ビームを照射する。これにより、他車両がピッチ運動により上下方向に傾き、光投影パターンの投影位置が変化した場合においても、他車両が投影位置に到達するまでの時間の変化に応じて光投影パターンの大きさも変化するため、自車両は、光投影パターンの大きさを求めることにより、他車両が投影位置に到達するまでの時間を正確に求めることができる。
【0011】
本発明において、光投影パターンは、所定の時間間隔で複数の光パルスを照射することにより路面上に形成された複数の光スポットであってもよい。
【0012】
この構成によれば、他車両が路面に光スポットを形成することにより、自車両は他車両とその光スポットの投影位置との位置関係を求めることができる。
【0013】
本発明において、測定手段は、検出手段で検出した複数の光スポットの検出時間間隔に基づいて光投影パターンの大きさを算出してもよい。
【0014】
この構成によれば、自車両は、検出手段により検出された複数の光スポット間の時間間隔に基づいて光投影パターンの大きさを算出することができる。これにより、自車両は、上記投影位置と他車両との位置関係を求めることができる。
【0015】
本発明において、他車両は、光スポットとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成してもよい。この場合において、測定手段は、検出手段で検出した第1のパターン列に含まれる複数の光スポットの検出時間間隔と第2のパターンに含まれる複数の光スポットの検出時間間隔との差に基づいて、前記光投影パターンの大きさを算出する。また、第2のパターン列は、第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは異なる方向に形成される。
【0016】
この構成によれば、自車両が、第1のパターン列の検出時間間隔と第2のパターン列の検出時間間隔との差を求めることにより、光投影パターンの大きさを求めることができる。
【0017】
本発明において、第1のパターン列は、所定の楕円の一部の周上に形成され、第2のパターン列は、該楕円の周上の第1のパターン列とは異なる位置に形成されてもよい。
【0018】
この構成によれば、自車両の進行方向に対する他車両の進行方向の角度に関わらず、自車両は光投影パターンの大きさを求めることができる。これにより、自車両は、他車両と投影位置との位置関係を求めることができる。
【0019】
本発明において、測定手段は、検出手段で検出した第1のパターン列及び第2のパターン列に含まれる光スポットの検出時間間隔に基づいて、自車両と他車両との角度を測定してもよい。
【0020】
この構成によれば、第1のパターン列の光スポットの時間間隔を測定し、第2のパターン列の光スポットの時間間隔を測定することによって、自車両と他車両との角度を求めることができる。
【0021】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。
【0022】
この構成によれば、測定手段により測定された他車両の位置に基づいて、自車両と他車両との衝突を予測することができる。
【0023】
本発明の第2の発明は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が路面上の所定の領域に形成した光投影パターンを検出する。測定手段は、検出手段で検出された、自車両から見た光投影パターンに基づいて、自車両の進行方向に対する他車両の進行方向の角度を測定する。
【0024】
この発明によれば、他車両が路面上に形成した光投影パターンを自車両が検出することにより、自車両と他車両との角度を測定することができる。
【0025】
本発明において、他車両は、光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に複数の光スポットを所定の配置で形成してもよい。この場合において、測定手段は、検出手段で検出した複数の光スポットの自車両から見た配置に基づいて、角度を測定してもよい。
【0026】
この構成によれば、自車両は、他車両が形成した光スポットのパターンを検出することにより、自車両の進行方向に対する他車両の進行方向の角度を求めることができる。
【0027】
本発明において、測定手段は、検出手段で検出した複数の光スポットの検出時間間隔に基づいて上記角度を算出してもよい。
【0028】
この構成によれば、自車両は、検出手段により検出された複数の光スポット間の時間間隔に基づいて自車両の進行方向に対する他車両の進行方向の角度を算出することができる。
【0029】
本発明において、他車両は、光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成してもよい。この場合において、測定手段は、検出手段で検出した第1のパターン列に含まれる複数の光スポットの検出時間間隔と第2のパターン列に含まれる複数の光スポットの検出時間間隔とに基づいて、上記角度を算出する。また、第2のパターン列は、第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは異なる方向に形成される。
【0030】
この構成によれば、自車両が、第1のパターン列の検出時間間隔と第2のパターン列の検出時間間隔とを測定することにより、自車両の進行方向に対する他車両の進行方向の角度を求めることができる。
【0031】
本発明において、第1のパターン列は、他車両の進行方向に対して略直角に形成され、第2のパターン列は、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは逆方向に形成されてもよい。
【0032】
この構成によれば、他車両の進行方向に対して略直角に形成された光スポットを自車両が検出し、各光スポットの検出時間間隔に基づいて、他車両と投影位置との位置関係及び他車両と自車両との角度を求めることができる。
【0033】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。
【0034】
この構成によれば、測定手段により測定された他車両の位置に基づいて、自車両と他車両との衝突を予測することができる。
【0035】
本発明において、衝突判断手段は、検出手段で検出された光投影パターンの大きさが所定の大きさ以上の場合、衝突しないと判断してもよい。
【0036】
この構成によれば、自車両は、検出手段で検出された光投影パターンの大きさが所定の大きさ以上の場合、他車両と投影位置との距離が所定以上離れていると判断することができる。従って、自車両は衝突しないと判断することができる。
【0037】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。衝突判断手段は、検出手段で検出した複数の光スポットの検出時間間隔と上記所定の時間間隔とのずれが所定の範囲にない場合、衝突しないと判断してもよい。
【0038】
この構成によれば、他車両と投影位置との距離が所定以上離れている場合、上記検出時間間隔のずれは、大きくなる。この場合、自車両と他車両とは衝突する可能性が低い。また、自車両と他車両とが対向して走行中の場合や並走している場合、上記検出時間間隔のずれは、小さくなる。この場合、自車両と他車両とはすれ違う可能性が高い。従って、上記検出時間間隔のずれが所定の範囲にない場合、自車両は、自車両と他車両とは衝突しないと判断することができる。
【0039】
本発明において、他車両は、投影位置に形成される光投影パターンを1組として、該他車両からの距離が互いに異なる位置に複数組の光投影パターンを形成してもよい。
【0040】
この構成によれば、他車両が形成した複数組の光投影パターンのうち、1組を自車両が検出することにより、自車両は他車両とその組の光投影パターンの投影位置との位置関係を求めることができる。
【0041】
第3の発明は、他車両が光を照射することにより他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光の一部を遮蔽することにより路面上に形成した光が照射されない複数の光ブランク投影パターンを検出する。測定手段は、検出手段で検出された光ブランク投影パターンの大きさに基づいて、投影位置と該他車両との位置関係を測定する。他車両は、投影位置と他車両の位置との位置関係を光ブランク投影パターンの大きさに対応させて、光ブランク投影パターンを形成する。
【0042】
この構成によれば、路面上に形成される光ブランク投影パターンにより、自車両は、他車両と光ブランク投影パターンの投影位置との位置関係を求めることができる。
【0043】
本発明において、光ブランク投影パターンは、光の一部を遮蔽することにより路面上に形成された複数の光ブランクスポットであってもよい。
【0044】
この構成によれば、他車両が光ブランク投影パターンとして、光ブランクスポットを路面上に形成することにより、自車両は、他車両と光ブランク投影パターンの投影位置との位置関係を求めることができる。
【発明の効果】
【0045】
他車両が該他車両と光投影パターンの投影位置との位置関係を光投影パターンの大きさに対応させて路面上に形成した光投影パターンを、自車両が検出することにより、自車両は他車両と上記投影位置との位置関係を求めることができる。
【発明を実施するための最良の形態】
【0046】
(第1の実施形態)
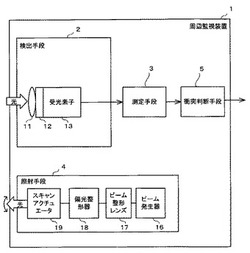
以下、図1から図13を参照して、第1の実施形態に係る周辺監視装置について説明する。図1は、第1の実施形態に係る周辺監視装置の構成を示すブロック図である。周辺監視装置1は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって当該他車両の位置を測定する。図1に示されるように、周辺監視装置1は、検出手段2と、測定手段3と、照射手段4と、衝突判断手段5とを備える。以下、各部について説明する。
【0047】
(周辺監視装置1の各部の説明)
検出手段2は、自車両進行方向の路面上の所定領域を検出領域として、照射手段4を有する他車両が光を照射することによって当該検出領域に形成した光投影パターンを検出する。本実施形態では、他車両は複数の光パルスを照射することにより、路面上に複数の光スポットを形成する。検出手段2は、レンズ11と、フィルタ12と、受光素子13とを有する。レンズ11は、車両前方の検出領域から入射される光を集光する。フィルタ12は、集光された光のうち、所定の波長の光を透過する。ここで所定の波長の光とは、他車両が照射手段4から照射した光であり、例えば、赤外光である。受光素子13は、フィルタ12が透過した光を受光する。受光素子13は、空間分解能を持たず、受光した光を電気信号に変換する。変換された電気信号は測定手段3へ出力される。以上のようにして、検出領域に形成された光スポットは、レンズ11、フィルタ12、受光素子13を介して検出される。なお、受光素子13は、空間分解能を持つものでもよい。また、検出手段2は、自車両の車速や周辺環境(上り坂や下り坂等)に応じて自車両から検出領域までの距離が変化するように調整されてもよい。
【0048】
測定手段3は、検出手段2で検出された複数の光スポットによって形成される光投影パターンの大きさに基づいて、光スポットが形成された投影位置と他車両との位置関係を測定する。ここで光投影パターンとは、照射手段4を有する他車両が路面上に形成した複数の光スポットを結んでできる路面上の領域の形状である。以下、光投影パターンにより囲まれる路面上の領域を投影領域と呼ぶことがある。例えば、路面上に4つの光スポットが形成され、これらを結ぶと4角形が形成される場合、この4角形で囲まれた領域が投影領域である。測定手段3は、この光投影パターンの大きさ(複数の光スポットのうち、所定の2つの光スポット間距離)から、光スポットの投影位置(光投影パターンの中心位置)と他車両との位置関係を測定する。具体的には、測定手段3は、上記投影位置から他車両までの距離を測定する。なお、後述するように、照射手段4が光パルスではなく、所定時間継続して光ビームを上記位置関係に対応させて照射する場合、路面上には、線状に形成された光投影パターンが形成される。この場合、線状の光投影パターンの大きさから当該光投影パターンの投影位置と他車両との位置関係を測定してもよい。ここで、線状の光投影パターンの大きさとは、光投影パターンによって囲まれる領域の所定の2点を結んだ線分の長さ(例えば、光投影パターンが四角形であれば対角線の長さ)である。また、複数の光スポットが路面上に直線上に形成される場合、これら光スポットを結んだ線分の長さから上記位置関係を測定してもよい。
【0049】
照射手段4は、車両の進行方向の所定位置に所定の時間間隔で複数の光パルスを照射することによって、路面上に複数の光スポットを形成する。照射手段4は、図1に示されるように、ビーム発生器16と、ビーム整形レンズ17と、偏光整形器18と、スキャンアクチュエータ19とを有する。ビーム発生器16は、例えば、半導体レーザ装置で構成され、所定の波長の光を発生させる。本実施形態では、ビーム発生器16は、赤外域の波長の光を発生させる。ビーム発生器16は、光パルスを発生させる。ビーム整形レンズ17は、ビーム発生器16で発生した光ビームを整形する。偏光整形器18は、ビーム整形レンズ17から出力された光ビームの入射面に垂直な成分の一部を反射させることにより光ビームを偏光させる。スキャンアクチュエータ19は、偏光整形器18で偏光された光ビームを所望の方向に出射させる。本実施形態では、スキャンアクチュエータ19とビーム発生器16とを制御することにより、2つのパターンの光スポットを形成する。なお、ビーム発生器16が発生させる光は赤外域の波長の光に限られず、どのような波長の光であってもよい。また、照射手段4は、上記構成に限られず、所定のパターンの光スポットを形成するものであれば、どのような構成でもよい。照射手段4が形成する光スポットのパターンとその形成方法については、後述する。
【0050】
衝突判断手段5は、測定手段3からの測定情報に基づいて、自車両と他車両との衝突を判断する。衝突判断手段5は、測定手段3からの測定情報として、他車両から該他車両が形成した光スポットの投影位置までの距離を取得する。そして、衝突判断手段5は、自車両の速度や検出領域までの距離等の自車両情報と測定手段3が測定した測定情報とに基づいて、他車両と自車両とが衝突するか否かを判断する。自車両から検出領域までの距離と他車両から投影位置までの距離とを比較することにより、衝突可能性を判断する。そして、衝突判断手段5は、衝突可能性が高いと判断した場合、運転者に対して警告等を行う。
【0051】
以上が各部の説明である。次に、図2から図7を参照して、照射手段4が路面上に形成する光スポットについて、詳細に説明する。
【0052】
(照射手段が形成する光スポット)
図2は、照射手段4が、自車両から光スポットの投影位置までの距離を光投影パターンの大きさに対応させて、光パルスを照射する様子を示した図である。照射手段4は、路面上に複数の光スポットを形成する。図2に示されるように、照射手段4は、複数の光パルスを照射することにより、路面上に複数の光スポット(a1〜b2)を形成する。照射手段4は、光スポットの投影位置と自車両21との位置関係を光投影パターンの大きさに対応させて、光パルスを照射する。具体的には、照射手段4は、光スポットの投影位置から自車両21までの距離S(m)を光投影パターンにおける2点間の距離(例えば、4つの光スポットを結んで形成される4角形の対角線の長さd(m))に対応させて、光スポットを路面上に形成する。例えば、図2(a)では、自車両21から光スポットの投影位置までの距離がS1(m)であり、光投影パターンの大きさ、すなわち、光スポットa2とb2との距離はd1(m)である。一方、図2(b)では、自車両21から光スポットの投影位置までの距離がS2(m)であり、光スポットa2’とb2’との距離はd2(m)である。ここで、S1/d1とS2/d2は等しい。すなわち、照射手段4は、自車両21から投影位置までの距離Sと光投影パターンの対角線の長さdとの比が一定になるように、所定の時間間隔で複数の光パルス(図2では4つ)を進行方向の所定位置に照射し、光スポットを形成する。そして、照射手段4は、複数の光スポット(上記では4つ)を1組として、自車両21から所定距離の位置に1組の光スポットを形成し、それとは異なる位置に、別の組の光スポットを形成する。自車両21から各投影位置までの距離と各光投影パターンの大きさとの比は一定である。なお、光投影パターンの大きさと投影位置までの距離との比は必ずしも一定である必要はなく、光投影パターンの大きさと投影位置とが所定の関係で予め対応付けられて、光パルスが照射されてもよい。
【0053】
次に、自車両21が上下方向に傾いた場合に路面上に形成される光スポットについて説明する。図3は、自車両が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合、路面上に形成される光スポットの投影位置を示した図である。図3(a)は、自車両21がピッチ運動しない場合、光パルスが照射される方向を横から見た図である。また、路面を上から見た場合に形成される複数の光スポットが示されている。図3(a)に示されるように、自車両21がピッチ運動しない場合、光スポットは、自車両21から光スポットの投影位置までの距離はS(m)であり、その場合の光投影パターンの大きさはd(m)である。自車両21がピッチ運動した場合、光パルスの出射角度が変動する。従って、本来自車両21から距離Sの位置に照射される光パルスは、異なる位置に照射され、光スポットが形成される。図3(b)は、自車両21がピッチ運動することにより車両前部が上向きに傾いた場合、光パルスが照射される方向を横から見た図である。また、路面を上から見た場合に形成される複数の光スポットが示されている。図3(b)に示されるように、自車両21から出射された光パルスは、自車両21からS’(m)離れた位置に照射される。この場合、路面上に形成される光投影パターンの大きさはd’(m)であり、図3(a)の場合と比較して、大きくなる。
【0054】
ここで、自車両21から出射される各光パルスの自車両21に対する出射角度(自車両21の垂直方向及び水平方向に対する出射角度)は、自車両21の傾きに関わらず、一定である。従って、光投影パターンの大きさd’は、自車両21から投影位置までの距離S’に比例して大きくなる。すなわち、自車両21から投影位置までの距離と光投影パターンの大きさとの比が予め一定になるように光スポットが形成される場合、自車両21がピッチ運動することによって投影位置が変化し、光投影パターンの大きさが変化したときでも、光投影パターンの大きさから自車両21から投影位置までの距離を求めることができる。例えば、自車両21から投影位置までの距離が10(m)の位置に光投影パターンの大きさが1(m)、自車両21から投影位置までの距離が20(m)の位置に光投影パターンの大きさが2(m)となるように、照射手段4は、2組の光スポットを形成する。この場合において、ピッチ運動により自車両21の車両前部が上向きに傾き、本来10(m)先に照射されるはずの光パルスが、20(m)先に照射された場合、路面上に形成される光投影パターンの大きさは、本来1(m)のはずが2(m)に拡大される。従って、自車両21がピッチ運動により傾いた場合でも、その傾きによって光スポットの投影位置と光投影パターンの大きさとが同じ割合で変動する。
【0055】
以上のように、照射手段4は、自車両から投影位置までの距離と光投影パターンの大きさとの比が予め一定になるように複数の光スポット(上記説明では4つ)を1組として、複数組の光スポットを形成する。このような照射手段4を自車両及び他車両が搭載することにより、自車両は、他車両が路面上に形成する光スポットを検出することによって、他車両の位置を正確に求めることができる。
【0056】
なお、他の実施形態では、照射手段4は、自車両から投影位置までの距離に替えて、自車両が投影位置に到達するまでの到達時間を光投影パターンの大きさに対応させて光スポットを形成してもよい。自車両は、他車両が形成した光スポットを検出領域で検出する。自車両から検出領域までの距離は予め定められている。また、自車両は、自車両の速度を車速センサ等から知ることができる。従って、自車両は、車速と検出領域までの距離とに基づいて検出領域までの到達時間を求めることができる。そして、照射手段4は、到達時間と光投影パターンの大きさとの比が一定になるように、複数組の光スポットを路面上の異なる位置に形成する。例えば、照射手段4は、一定速度で走行中の自車両が10(sec)後に到達する位置に光投影パターンの大きさが1(m)である光スポットを形成し、自車両が20(sec)後に到達する位置に光投影パターンの大きさが2(m)である光スポットを形成する。この場合において、他車両が自車両の光スポットを検出し、光投影パターンの大きさが1(m)と算出された場合、他車両は、自車両が投影位置に到達するまでの時間は10(sec)であると算出することができる。また、自車両がピッチ運動によって上下方向に傾いた場合においても、光投影パターンの大きさから到達時間を正確に求めることができる。すなわち、車両前部がピッチ運動によって上方に傾いた場合、光スポットは、本来の投影位置よりも車両の遠方に形成される。例えば、本来10(m)先に形成される光スポットが20(m)先に形成された場合、光投影パターンの大きさは距離に比例して大きくなるため、路面上に形成される光投影パターンは、ピッチ運動しない場合の光投影パターン(10(m)先に形成されるはずの光投影パターン)の大きさの2倍に拡大される。また、20(m)先に到達するまでの到達時間は、速度が一定であれば、10(m)先に到達するまでの時間の2倍になる。従って、自車両がピッチ運動によって上下方向に傾いた場合においても、他車両は、光投影パターンの大きさを測定することによって、自車両が光スポットの投影位置に到達するまでの時間を正確に算出することができる。このようにして求められた到達時間に基づいて、衝突判断を行うことができる。自車両が検出領域に到達するまでの時間を自車両の速度と検出領域までの距離から算出し、測定手段3により取得された他車両が投影位置に到達するまでの到達時間と算出した自車両の到達時間とを比較することにより、衝突可能性を判断する。すなわち、自車両と他車両が検出領域に到達する時間が一致する場合は、自車両と他車両とは衝突する可能性が高い。そして、衝突判断手段5は、衝突可能性が高いと判断した場合、運転者に対して警告等を行う。
【0057】
次に、照射手段4が照射する複数の光パルスにより、路面上に形成される光スポットのパターンについて、説明する。図4は、自車両が進行方向の所定位置に複数組の光スポットを形成する様子を示した図である。図4に示されるように、自車両21は、進路上の所定位置に複数の光スポット(a1〜an及びb1〜bn)を形成する。照射手段4は、所定時間間隔で複数の光パルスを照射する。従って、複数の光スポットは、順番に路面上に形成される。本実施形態では、後述する方法により、光スポットa1からanの順に自車両から見て左側から右側に形成されるパターンの光スポット(以下、右スキャンの光スポットと呼ぶ)と、光スポットb1からbnの順に自車両から見て右側から左側に形成されるパターンの光スポット(以下、左スキャンの光スポットと呼ぶ)とが形成される。図4に示されるように、右スキャンと左スキャンの光スポットがそれぞれ異なる直線上に並び、右スキャンの光スポットを照射順に結んだ軌跡の方向が左スキャンの光スポットを照射順に結んだ軌跡の方向と反対となるように、光スポットが形成される。各直線は互いに平行であり、車両の進行方向に対して直角である。自車両及び照射手段4を有する他車両は、上記パターンの光スポットを路面上に形成しながら走行する。そして、自車両は、他車両が路面上に形成した上記パターンの光スポットを、検出手段2を用いて検出する。
【0058】
図5は、自車両が、他車両が形成した光スポットを検出領域Rで検出することにより、他車両から光スポットの投影位置までの距離を求める様子を示した図である。自車両21は、他車両22が形成する光スポットの光投影パターンの大きさを測定することにより、上記距離を測定することができる。また、他車両22が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合においても、自車両21は、光投影パターンの大きさを測定することにより、他車両22から光スポットの投影位置までの距離を正確に測定することができる。
【0059】
次に、照射手段4が形成する上記右スキャンと左スキャンの光スポットの形成方法について、説明する。照射手段4は、スキャンアクチュエータ19とビーム発生器16とを制御することにより、上記パターンの光スポットを路面上に形成する。スキャンアクチュエータ19は、例えば、ガルバノミラーにより構成される。ガルバノミラーを制御することにより、光パルスの出射方向を制御し、路面上の所定位置に上記パターンの光スポットを形成することができる。また、スキャンアクチュエータ19として、ポリゴンミラーを用いてもよい。以下、ポリゴンミラーを用いて右スキャンと左スキャンの光スポットを形成する方法について、述べる。
【0060】
図6Aから図7を参照して、照射手段4が形成する右スキャンと左スキャンのパターンの光スポットについて説明する。図6A及び図6Bは、スキャンアクチュエータ19の詳細な構成を示す図である。図6Aはスキャンアクチュエータ19を側方から見た図であり、図6Bはスキャンアクチュエータ19を下面に平行な面で切ったA−A線端面図である。なお、図6A及び図6B(及び図7)では、図の左側が車両の前方に対応する。図6A及び図6Bに示されるように、スキャンアクチュエータ19は、ポリゴンミラー61と反射鏡62で構成される。ポリゴンミラー61は、上面と下面及び6つの側面61aから側面61fにより構成された錐台状の形状である。側面61aから側面61fは、平面と多数の平面によって形成される多角面(概曲面と呼ぶ)とが交互に配置される。すなわち、図6Bに示されるように、側面61a、61c及び61eは平面により構成され、側面61b、61d及び61fは概曲面により構成される。ここで、平面により構成される側面61a、61c及び61eをA領域と呼び、概曲面により構成される側面61b、61d及び61fをB領域と呼ぶことにする。また、ポリゴンミラー61は、回転軸61gを中心に時計回りに回転する。B領域の概曲面の曲率は、回転軸61gを中心とした側面により形成される6角形(図6Bの側面61a、61c及び61eを3辺とし、破線を3辺とする6角形)の外接円の曲率よりも大きく設定される。なお、ポリゴンミラー61は、上記構成に限らず、側面にA領域とB領域を有していればどのような形状でもよく、例えば、上面及び下面が8角形で、側面が8面あってもよい。また、A領域とB領域は必ずしも交互に配置されていなくてもよい。
【0061】
ビーム発生器16から発生した光パルスは、反射鏡62で反射され、ポリゴンミラー61の1つの側面、例えば、側面61aに入射する。側面61aに入射した光パルスは、側面61aで反射され、車両の前方に出射される。ここで、各側面61aから61fの車両垂直方向に対する角度γは、各側面61aから61fで異なるように設定される。従って、各側面で反射した光パルスは、車両前方の異なる位置に照射される。例えば、側面61aの角度よりも側面61cの角度の方が大きく設定された場合、側面61cで反射した光パルスの方が、側面61aで反射した光パルスよりも、より遠方に照射される。このように、各側面61の垂直方向に対する角度γが調整されることにより、車両前方の所定距離の位置に光スポットが形成される。次に、ポリゴンミラー61を回転させた場合、照射手段4が形成する光スポットのパターンについて説明する。
【0062】
図7は、ポリゴンミラー61を回転させた場合に形成される光スポットのパターンを説明する図である。図7の(Aa)から(Ac)は、ポリゴンミラー61の回転角に応じてビーム発生器16から光パルスを複数発生させた場合(図では3つのパルス)に、入射光(破線)がポリゴンミラー61のA領域の1面で反射したときの反射光(実線矢印)が出射する方向を示したものである。図7の(Aa)から(Ac)に示されるように、A領域で反射した光パルスの反射方向は、ポリゴンミラー61の回転方向と同じ方向に変化する。これらA領域の1つの面で反射した複数の光パルスにより、路面上に光スポットが形成される。これら光スポットは車両から見て左方向から右方向に略直線上に形成される。これが右スキャンの光スポットである。
【0063】
一方、B領域で反射された光パルスは、図7の(Ba)から(Bc)で示されるような方向に出射される。図7の(Ba)から(Bc)は、ポリゴンミラー61の回転角に応じてビーム発生器16から光パルスを複数発生させた場合(ここでは3つのパルス)、入射光(破線)がポリゴンミラー61のB領域の1面で反射したときの反射光(実線矢印)が出射する方向を示したものである。図7の(Ba)で示されるように、B領域はその曲率が6角形の外接円の曲率よりも大きい概曲面であるため、入射光は(Aa)とは反対の方向に反射される。(Bc)においても同様に、入射光は、(Ac)とは反対の方向に反射される。すなわち、B領域で反射した光パルスの反射方向は、ポリゴンミラー61の回転方向と反対の方向に変化する。これらB領域の1つの面で反射した複数の光パルスにより、路面上に光スポットが形成される。これら光スポットは車両から見て右方向から左方向に略直線上に形成される。これが左スキャンの光スポットである。
【0064】
以上のように、スキャンアクチュエータ19が構成されることにより、図4で示された右スキャンと左スキャンのパターンの光スポットが形成される。そして、この2つのパターンの光スポットを1組として、複数組の光スポットが、その投影位置と光投影パターンの大きさとが対応付けられて、形成される。
【0065】
(光投影パターンの大きさの算出方法)
次に、測定手段3が、検出手段2により検出された光スポットから光投影パターンの大きさを算出する方法について、図8から図12を参照して、説明する。この方法では、光の光路差によって生じる各光スポットの検出時間間隔を求めることによって、光投影パターンの大きさを算出する。
【0066】
図8は、他車両22が照射した右スキャンの複数の光パルスが、自車両21の検出領域で反射し、自車両21により検出される様子を示した図である。図8に示されるように、他車両22は、右スキャンの光パルスとして、3つの光パルスを所定の時間間隔で照射する。ここで、照射される3つの光パルスの時間間隔をβ(sec)とする。他車両22から出射された1つ目の光パルスは、光スポットa1を路面上に形成し、路面で反射する。そして、反射された光パルスは、自車両21で検出される。この1つ目の光パルスは、他車両22から光スポットa1の位置までの距離Sa1(m)と光スポットa1から自車両21までの距離La1(m)を進む。従って、1つ目の光パルスは、他車両22から出射された時刻からこれらの距離Sa1+La1を光が進む時間だけ遅れて、自車両21で検出される。1つ目の光パルスが出射されてからβ(sec)後に2つ目の光パルスが出射される。2つ目の光パルスは、他車両22から出射し、距離Sa2(m)を進んだ後、光スポットa2を形成する。そして、2つ目の光パルスは、距離La2(m)を進んだ後、自車両21で検出される。従って、2つ目の光パルスは、他車両22から出射された時刻から距離Sa2+La2を光が進む時間だけ遅れて、自車両21で検出される。さらに、3つ目の光パルスも、2つ目の光パルスからβ(sec)後に出射される。3つ目の光パルスも同様に、光スポットa3を形成して自車両21で検出されるまでに距離Sa3(m)と距離La3(m)を進むため、他車両22から出射された時刻から距離Sa3+La3を光が進む時間だけ遅れて、自車両21で検出される。このように、他車両22から出射された3つの光パルスは、出射された時刻から少しだけ遅れて自車両21で検出される。従って、自車両21で検出される3つの光スポットの時間間隔は、時間間隔βとは異なる。
【0067】
図9は、右スキャンの3つの光パルスが出射されてから自車両21で検出されるまでの時間の遅れを模式的に示した図である。図9において、縦軸は光の強さを示し、横軸は時刻を示す。図9(a)は、他車両22から3つの光パルスが出射された時刻を示す。図9(b)は、他車両22から出射された3つの光パルスが路面で反射した時刻を示す。図9(c)は、他車両22から出射された3つの光パルスが自車両21で検出された時刻を示す。まず、他車両22は、光スポットa1を形成する光パルスを出射する(図9(a))。光スポットa1は、光が距離Sa1を進む時間だけ遅れて路面上に形成される(図9(b))。そして、光が距離La1を進む時間だけさらに遅れて、自車両21は光パルスを検出する(図9(c))。従って、光スポットa1を形成する光パルスが出射された時刻を0とすると、自車両21は、時刻(Sa1+La1)/cで光スポットa1を検出する。ここで、cは光速である。同様にして、光スポットa2は、時刻β+(Sa2+La2)/cで検出される。また、光スポットa3も、同様にして、時刻2β+(Sa3+La3)/cで検出される。従って、光スポットa1と光スポットa2との検出時間間隔Δta1は、Δta1=β−(La1−La2)/c+(Sa2−Sa1)/cとなる。同様に、光スポットa2と光スポットa3との検出時間間隔Δta2は、Δta2=β−(La2−La3)/c+(Sa3−Sa2)/cとなる。ここで、他車両22から光スポットの投影位置までの距離が光スポット間の距離(a1とa2との距離)よりも十分に大きい場合、距離Sa1と距離Sa2との差は無視することができる。従って、上記検出時間間隔Δta1は、以下の式(1)で求められる。
Δta1=β−(La1−La2)/c 式(1)
また、同様に、検出時間間隔Δta2は、以下の式(2)で求められる。
Δta2=β−(La2−La3)/c 式(2)
【0068】
図10は、他車両22が照射した左スキャンの複数の光パルスが、自車両21の検出領域で反射し、自車両21により検出される様子を示した図である。図11は、左スキャンの3つの光パルスが出射されてから自車両21で検出されるまでの時間の遅れを模式的に示した図である。図11において、図9と同様、縦軸は光の強さを示し、横軸は時刻を示す。図10においても、上述の右スキャンの光スポットと同様、各光パルスは、それぞれの光パルスが出射された時刻から遅れて自車両21で検出される。上述した方法と同様に、光スポットb1と光スポットb2との検出時間間隔Δtb1は、以下の式(3)で求められる。
Δtb1=β+(Lb2−Lb1)/c 式(3)
さらに、光スポットb2と光スポットb3との検出時間間隔Δtb2は、以下の式(4)で求められる。
Δtb2=β+(Lb3−Lb2)/c 式(4)
【0069】
上記式(1)から式(4)で求められる検出時間間隔を図に示すと図12になる。図12は、第1の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図である。図12において、縦軸は、光スポットの検出時間間隔Δtを示し、横軸は、時刻を示す。例えば、光スポットa1と光スポットa2との検出時間間隔Δta1は、光スポットa2の検出時刻を横軸の時刻に、Δta1を縦軸の値にして、図12のようにプロットされる。図12で示されるように、右スキャンの光スポットの検出時間間隔Δtaは、光パルスの照射時間間隔βより少しずれた位置に、略直線上にプロットされる。左スキャンの光スポットの検出時間間隔Δtbも、光パルスの照射時間間隔βより少しずれた位置に、略直線上にプロットされる。また、右スキャンの光スポットの検出時間間隔Δtaの方が、左スキャンの光スポットの検出時間間隔Δtbよりも検出時間間隔が小さい。この時間間隔差は、右スキャン及び左スキャンの光スポット間の距離が大きければ大きいほど、大きくなる。すなわち、Δta1とΔtb1との差をΔtab1、Δta2とΔtb2との差をΔtab2とすると、Δtab1及びΔtab2は、式(1)から式(4)より、以下の式(5)及び式(6)で求められる。
Δtab1=(La1−Lb1)/c 式(5)
Δtab2=(Lb3−La3)/c 式(6)
ここで、La2とLb2は等しいとした。また、右スキャンの光スポットを結んだ直線と左スキャンの光スポットを結んだ直線との距離は、他車両22から投影位置までの距離及び自車両21から当該投影位置までの距離と比較して、十分小さいと考えられる。そうすると、右スキャンの光スポット間の距離d2と左スキャンの光スポット間の距離d2’との差は、無視することができる。この場合、La1とLb3はほぼ等しく、Lb1とLa3はほぼ等しい。すなわち、上記Δtab1及びΔtab2は、ほぼ等しくなる。従って、時間間隔差Δtab1は、式(5)から明らかなように、La1とLa3との差、すなわち、光スポットLa1とLa3との間の距離2・d2を光が進む時間を示す。従って、図12のように各光スポットの検出時間間隔をプロットし、右スキャンと左スキャンの時間間隔差を求めることによって、光スポット間の距離(光投影パターンの大きさ)を算出することができる。なお、自車両21は、ある速度で走行しているため、光が各光スポット間を進む時間に自車両21が進む距離及び右スキャンから左スキャンの光スポットが形成されるまでの時間に自車両21が走行する距離を補正して、上記光スポット間の距離を算出する必要がある。
【0070】
なお、光投影パターンの大きさは予め定められているため、上記時間間隔差は、上限値がある。他車両22から投影位置までの距離が最も遠い光スポットの組を自車両21が検出した場合に、上記時間間隔差が最大となる。他車両22のピッチ運動によって車両の前方が上方向に傾いた場合、他車両22は、最も遠い光スポットの組よりもさらに遠い位置に光スポットを形成することがある。この光スポットを自車両21が検出した場合、光投影パターンの大きさは上記上限値よりも大きくなる。従って、検出した光スポットの光投影パターンの大きさが上記上限値よりも大きい場合、他車両22は投影位置から非常に遠い位置に存在し、自車両21と他車両22とは衝突する可能性は低いため、自車両21は、衝突しないと判断してもよい。
【0071】
また、式(1)から式(4)で示される右スキャン又は左スキャンの光スポットの検出時間間隔に基づいて、各光スポット間の距離が算出されてもよい。例えば、式(1)で示されるΔta1は、光スポットLa1とLa2との間の距離d2に応じて変化するため、Δta1を求めることにより光投影パターンの大きさを算出することができる。
【0072】
上記光スポットの検出時間間隔Δtは、例えば、次のようにして求められることができる。図13は、光スポットの検出時間を求める方法を示した図である。この方法では、検出手段2に入射した光パルスが2つに分光され、各フォトダイオードで受光される。2つのフォトダイオードは、所定の周期で交互にマスクされる。例えば、マスクの周期は、10(nsec)に設定される。図13(a)は、出射される光パルスを示した図である。縦軸は光の強度を示し、横軸は時間を示す。図13(a)に示されるように、出射される光パルスは、実際にはある程度の時間にわたって広がりを有している。図13(b)は、各フォトダイオードのマスクのタイミングを示した図であり、ONでマスクし、OFFで受光される。図13(c)は、各フォトダイオードで受光される光を示した図である。検出手段2に入射した光パルスは、2つのフォトダイオードで受光される。2つのフォトダイオードは交互にマスクされるため、図13(c)で示されるように、各フォトダイオードには、光パルスのうちマスクされない時間に応じた光だけ受光される。従って、図13(c)で示されるフォトダイオード1及びフォトダイオード2の三角形の面積比を求めることによって、受光のタイミングtを求めることができる。図13では、2つの三角形の面積が等しいため、光パルスはマスクの1/2周期で受光されたことが分かる。このようにして、各光スポットの受光のタイミングを求めることができ、各光スポットの受光タイミングの差から光スポットの検出時間間隔Δtを求めることができる。なお、他の方法においては、各光スポットの検出時刻を正確に測定することによって、各光スポットの検出時間間隔を求めてもよい。
【0073】
以上のようにして、光スポットの時間間隔差から光投影パターンの大きさを求めることができ、光投影パターンの大きさから光スポットの投影位置から他車両22までの距離を求めることができる。求められた距離(又は到達時間)により、自車両21と他車両22とが衝突するか否かを判断することができる。
【0074】
なお、本実施形態では、自車両21の進行方向に対する他車両22の進行方向の角度が図8に示されるように直角である場合を想定したが、自車両21と他車両22とがある角度θをもって走行中である場合、自車両21から各光スポットまでの距離が異なるため、上記時間間隔差が角度θによって変化する。従って、自車両21と他車両22との角度θを求め、その角度θによって生じる変化を補正する必要がある。自車両21と他車両22との角度θは、例えば、各光スポットの検出時間間隔のずれにより求められる。角度θを求める方法については、後述する。
【0075】
また、他車両22が路面上に形成する光投影パターンは、点状の光スポットではなく、光ビームを継続して照射することにより光ビームの軌跡が描かれ、路面上に形成される線状のパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、上記投影領域が形成されてもよい。
【0076】
また、光スポットに替えて、一部の光を遮蔽することによって形成される、光ブランク投影パターンであってもよい。他車両22が(ヘッドライト等の)一部を遮蔽した光を照射し、路面上に光が照射される領域と照射されない領域(光ブランク領域)を形成する。この形成された光ブランク領域が、光ブランク投影パターンである。さらに光ブランク投影パターンは、点状のブランク領域によって形成される光ブランクスポットであってもよい。
【0077】
また、本実施形態では、光スポットの検出時間間隔から光投影パターンの大きさを算出したが、他の方法によって光投影パターンの大きさを算出してもよい。例えば、距離画像の技術を用いて路面に形成された光スポット間の距離を算出してもよい。
【0078】
(第2の実施形態)
次に、第2の実施形態について、図14から図16を参照して、説明する。第2の実施形態に係る周辺監視装置は、第1の実施形態に係る周辺監視装置1と同様の構成であるため、説明を省略する。
【0079】
第2の実施形態では、照射手段4が形成する光投影パターンが、第1の実施形態とは異なる。図14は、第2の実施形態における照射手段が形成する光スポットのパターンを示した図である。図14に示されるように、照射手段4は、各光スポットが所定の半径を持つ円の円周上に形成されるように、光パルスを照射する。そして、照射手段4は、円を形成する光スポットを1組の光スポットとして、路面上の異なる位置に複数組の光スポットを形成する。第1の実施形態と同様、光スポットの投影位置(光スポットによって形成される円の中心)と光投影パターンの大きさ(当該円の半径r)との比が一定になるように、各組の光スポットが形成される。このように、光スポットが円周上に形成されることによって、自車両21と他車両22とがある角度θをもって走行中の場合(自車両21がP2の位置)においても、角度θに関係なく光投影パターンの大きさを求めることができる。以下、詳細に説明する。なお、このようなパターンの光スポットは、スキャンアクチュエータ19として、ガルバノミラーを用いることによって形成することができる。
【0080】
図15は、他車両22が円周上に右スキャンの光スポットと左スキャンの光スポットを形成し、自車両21が光スポットを検出する様子を示した図である。他車両22は、右スキャンの光スポット(a1〜an)を他車両22の左側から右側に向かって円Cの円周上に反時計回りに形成し、左スキャンの光スポット(b1〜bn)を他車両22の右側から左側に向かって円Cの円周上に反時計周りに形成する。なお、説明のため、自車両21がP1の位置にある場合(自車両21と他車両22が直角の場合)を想定する。右スキャンの1番目の光スポットa1は、円Cの中心Oを通り、かつ、他車両22の進行方向に対して直角の直線と円Cとの交点に形成される。右スキャンのn番目の光スポットanは、a1とは反対側の交点に形成される。また、左スキャンの1番目の光スポットb1は、光スポットanの位置に形成され、左スキャンのn番目の光スポットbnは、光スポットa1の位置に形成される。
【0081】
光スポットa1及びbnから他車両22までの距離をSとし、光スポットa1及びbnから自車両21までの距離をLとする。他車両22から出射した右スキャンの1つ目の光パルスは、距離Sと距離Lを進んだ後、自車両21で受光される。従って、1つ目の光パルスは、他車両22から出射してから(S+L)/c(sec)後に自車両21で受光される。
【0082】
右スキャンの2つ目の光パルスは、円Cの円周上に光スポットa2を形成する。光スポットa1と中心Oとを結んだ線分と、光スポットa2と中心Oとを結んだ線分とがなす角度をτとする。他車両22から光スポットa2までの距離をS’とし、光スポットa2から自車両21までの距離をL’とする。他車両22から出射した右スキャンの2つ目の光パルスは、距離S’と距離L’を進んだ後、自車両21で受光される。従って、2つ目の光パルスは、1つ目の光パルスの出射からβ(sec)後に出射され、他車両22から出射してから(S’+L’)/c(sec)後に自車両21で受光される。ここで、距離S’及び距離L’は以下の式(7)及び式(8)で求められる。
S’=S−r・sinτ 式(7)
L’=L−(r−r・cosτ) 式(8)
これより、2つ目の光パルスは、他車両22から出射してから以下の式(9)に示される時間だけ遅れて自車両21で受光される。
(S+L−r・(sinτ−cosτ+1))/c(sec) 式(9)
従って、光スポットa1とa2との検出時間間隔Δta1は、以下の式(10)で求められる。
Δta1=β−r・(sinτ−cosτ+1))/c 式(10)
同様に、光スポットa3は、他車両22から出射されてから以下の式(11)に示される時間だけ遅れて自車両21で受光される。
(S+L−r・(sinτ2−cosτ2+1))/c(sec) 式(11)
ただし、τ2は、光スポットa1と中心Oとを結んだ線分と、光スポットa3と中心Oとを結んだ線分とがなす角度である。従って、光スポットa3とa2との検出時間間隔Δta2は、以下の式(12)で求められる。
Δta2=β−r・((sinτ2−cosτ2)−(sinτ−cosτ))/c 式(12)
同様にして、光スポットa4〜an及びb1〜bnまでの検出時刻を求め、各光スポットの検出時間間隔Δtを算出する。式(10)及び式(12)から明らかなように、検出時間間隔Δtは、円Cの半径rを振幅とする周期関数である。従って、このようにして算出された検出時間間隔Δtを図にプロットすると、図16のような曲線を描く。図16は、第2の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図である。図16において、横軸は時刻を示し、縦軸は検出時間間隔を示す。このようにして求められた曲線の振幅の大きさは、円Cの半径rに依存する。従って、振幅の大きさを求めることにより、円Cの半径rを求めることができる。
【0083】
次に、図15において、自車両21が位置P2にある場合について説明する。自車両21が位置P2にある場合、自車両21と他車両22とは直角とは異なる角度θをもって走行中である。位置P2にある自車両21が、他車両22が形成する光スポットを検出した場合、上述したように光の光路長の差から各光スポットの検出時間間隔Δtが変化する。位置P2にある自車両21が光スポットを見た場合、光スポットは円C上に形成されるため、光スポットは、位置P1にある場合と同じ配置で形成されたように見える。すなわち、各光スポットの照射順を無視すると、円周上に形成された光スポットは、どの角度から見ても同じに見える。従って、上述したように、各光スポットの検出時間間隔Δtを求め、グラフにプロットすると、図16のような曲線が得られる。そして、得られた曲線の振幅の大きさを求めることにより、円Cの半径rを求めることができる。なお、自車両21と他車両22とが直角とは異なる角度θをもっている場合、図16に示される曲線は、右または左にずれることになる。すなわち、光スポットはa1〜an、b1〜bnの順に形成されるため、図15に示されるように、自車両21が位置P1にある場合と、位置P2にある場合とでは、始点が異なる。ここで始点とは、自車両21から見た光スポットa1が形成される位置をいう。
【0084】
以上のようにして、各光スポットの検出時間間隔Δtを求め、検出時間間隔Δtの振幅の大きさを求めることによって、円Cの半径r、すなわち、光投影パターンの大きさを求めることができる。これによって、自車両21と他車両22との角度θに関係なく、自車両21は、他車両22から投影位置までの距離(又は他車両22が投影位置に到達するまでの到達時間)を求めることができる。また、他車両22が上下方向に傾いた場合でも、自車両21は、他車両22から投影位置までの距離を求めることができる。
【0085】
なお、本実施形態においては、光スポットは円周上に形成されることとしたが、楕円上に形成されてもよい。光スポットが楕円上に形成された場合においても、各光スポットの検出時間間隔Δtは、周期関数となり、当該関数の振幅の大きさを求めることで光投影パターンの大きさを求めることができる。また、図15において、右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnのそれぞれで円Cの半円を描いたが、図14に示されるように円の一部が描かれてもよい。
【0086】
また、第1の実施形態と同様、他車両22が路面上に形成する光のパターンは、点状の光スポットではなく、線状に円が描かれたパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、円状の投影領域が形成されてもよい。また、第1の実施形態と同様、上記パターンを光ブランク領域により形成してもよい。
【0087】
(第3の実施形態)
次に、第3の実施形態について、図17から図22を参照して、説明する。第3の実施形態に係る周辺監視装置は、第1の実施形態に係る周辺監視装置1と同様の構成であるため、説明を省略する。
【0088】
第3の実施形態では、照射手段4が形成する光投影パターンが、第1の実施形態とは異なる。図17は、第3の実施形態における照射手段が形成する光スポットのパターンを示した図である。図17に示されるように、右スキャンの光スポット及び左スキャンの光スポットは、自車両21の進行方向に対して斜めに形成される。これによって、各光スポットを結んでできる領域(光投影パターン)の自車両21から見た形状に基づいて、自車両21と他車両22との角度θを求めることができる。すなわち、図17に示されるように、他車両22は、複数の光スポットを1組として、複数組の光スポットを路面上に形成しながら走行する。各組の光スポットが形成する光投影パターンの形状は、他車両22からの距離に関係なく同じであり、他車両22からの距離に比例してその大きさが大きくなる。従って、自車両21から見た光投影パターンの形状は、自車両21と他車両22との角度θによって異なるため、自車両21から見た光投影パターンの形状(光投影パターンの傾き)を求めることで、上記角度θを求めることができる。このような光スポットのパターンは、ガルバノミラーにより形成することが可能である。また、ガルバノミラーとポリゴンミラーとを組み合わせることによっても形成可能である。
【0089】
なお、本実施形態では、図17で示されるような配置で光スポットを形成したが、第1の実施形態において形成したような配置(図4を参照)で光スポットを形成するようにしてもよい。すなわち、第1の実施形態と同様、右スキャンと左スキャンの光スポットがそれぞれ直線上に並び、右スキャンの光スポットを照射順に結んだ軌跡の方向が左スキャンの光スポットを照射順に結んだ軌跡の方向と反対となるように、光スポットが形成されてもよい。
【0090】
本実施形態では、各光スポットを検出し、その検出された各光スポットの時間間隔に基づいて、自車両21と他車両22との角度θを求めることとする。以下、自車両21と他車両22との角度を求める方法について、詳細に説明する。
【0091】
図18は、自車両21と他車両22とがある角度θをもって走行中の場合に他車両22が形成した光スポットを自車両21が検出する様子を示した図である。図18に示されるように、他車両22が、4つの光パルスを時間間隔βで照射することにより、4つの光スポットがa1、a2、b1、b2の順に路面上に形成される。光スポットa1から他車両22までの距離をSa1(m)、光スポットa1から自車両21までの距離をLa1(m)とする。同様に、光スポットa2から、他車両22までの距離をSa2(m)、自車両21までの距離をLa2(m)とする。さらに、光スポットb1から他車両22までの距離をSb1(m)、自車両21までの距離をLb1(m)とし、光スポットb2から他車両22までの距離をSb2(m)、自車両21までの距離をLb2(m)とする。このような場合、各光パルスが他車両22から出射されてから自車両21で検出するまでに、各光パルスは、それぞれの光路長に応じた時間だけ遅れる。
【0092】
図19は、他車両22から各光パルスが出射されてから自車両21で検出するまでの時間の遅れを模式的に示した図である。図19において、横軸は時刻を示し、縦軸は光の強さを示す。図19に示されるように、各光スポットが検出される時刻は、それぞれの光パルスが出射されてから各光路長を進む時間だけ遅れる。従って、各光スポットの検出時間間隔Δtは、光パルスが照射される時間間隔βと異なる。光スポットa1とa2との検出時間間隔をΔt1、光スポットa2とb1との検出時間間隔をΔt2、光スポットb1とb2との検出時間間隔をΔt3とすると、以下の式(13)〜式(15)で求められる。
Δt1=β+(La2−La1+Sa2−Sa1)/c=β+A 式(13)
Δt2=β+(Lb1−La2+Sb1−Sa2)/c=β+B 式(14)
Δt3=β+(Lb2−Lb1+Sb2−Sb1)/c=β+C 式(15)
ただし、A=(La2−La1+Sa2−Sa1)/c、B=(Lb1−La2+Sb1−Sa2)/c、C=(Lb2−Lb1+Sb2−Sb1)/cとした。式(13)及び式(14)、式(14)及び式(15)から以下の式(16)及び式(17)が得られる。
A+B=(Lb1−La1+Sb1−Sa1)/c 式(16)
B+C=(Lb2−La2+Sb2−Sa2)/c 式(17)
【0093】
上記式(16)において、A+B=0の場合、以下の式(18)となる。
La1−Lb1=Sb1−Sa1 式(18)
ここで、距離Sa1及び距離Sb1は、自車両21の位置に関わらず常に一定である。すなわち、A+B=0の場合、自車両21から光スポットa1までの距離La1と自車両21から光スポットb1までの距離Lb1との差が常に一定となる。従って、A+B=0を満たす場合、自車両21は、自車両21から光スポットa1までの距離La1と自車両21から光スポットb1までの距離Lb1との差が一定となる位置に存在することになる。
【0094】
次に、A+B=0を満たす自車両21の位置を求める。図20は、A+B=0を満たす点(x,y)を示した図である。ここで、光スポットa1と光スポットb1との距離をd(m)とする。光スポットa1は原点に位置し、光スポットb1は座標(d,0)に位置している。La1−Lb1が一定となる点(x,y)は、以下の式(19)を満たす。
【数1】

ここで、Sb1−Sa1=d1(m)とした。上記式(19)をxについて解くと、以下の式(20)が得られる。
【数2】
式(20)から明らかなように、A+B=0を満たす点、すなわち、La1とLb1との差が一定である点(x,y)は、曲線を描く。ここで、上記式(20)において、4d12y2/(d2−d12)がd12に比べて十分に大きい範囲では、d12は無視できるため、式(20)は以下の式(20’)に近似できる。
【数3】
式(20’)より、yが大きい範囲では、A+B=0を満たす点の集合は直線になる。d1及びdは、光投影パターンの大きさを示しており、yは、2つの光スポットを結んだ線分から自車両21までの距離を示している。自車両21は、自車両21の検出領域で他車両22の光スポットを検出する。通常、自車両21から検出領域まではある程度離れており、自車両21から検出領域までの距離は、光投影パターンの大きさ(所定の光スポット間の距離d)に比べて十分に大きい。従って、他車両22の光スポットを検出した自車両21は、式(20’)を満たす直線上に位置することになる。図20では、式(20’)により求められたA+B=0を満たす直線が矢印で示されている。図20に示されるように、yが正の場合と負の場合とでx軸に対称な2本の直線が示されている。また、このようにして求められたA+B=0を満たす直線が、図18において示されている。
【0095】
上記式(20’)によって求められた直線の傾きによって、当該直線と光スポットa1と光スポットb1とを結ぶ直線との角度を求めることができる。また、d1は、他車両22から光スポットb1までの距離Sb1と他車両22から光スポットa1までの距離Sa1との差である(式(19)より)。図18において、他車両22から投影位置までの距離は、光スポットa1と光スポットb1との他車両22の左右方向の距離に比べて十分長いため、d1は、光スポットa1と光スポットb1との他車両22の進行方向の距離d1’とほぼ等しい。また、dは、光スポットa1と光スポットb1との距離である。ここで、他車両22は、光投影パターンの大きさと他車両22から光スポットの投影位置までの距離(又は投影位置に到達するまでの到達時間)との比が一定になるように、複数組の光スポットを形成する。従って、d1とdとの比は常に一定である。また、他車両22がピッチ運動によって上下方向に傾き、光スポットの投影位置が変化した場合においても、d1とdとの比は変わらない。すなわち、式(20’)において、yの係数であるd12/(d2−d12)は、d1又はdの値に関係なく、常に一定である。従って、式(20’)によって求められる直線の傾きは、光投影パターンの大きさに関わらず一定となる。一方、他車両22は、複数の光スポットをその投影位置に関係なく同じ配置で形成するため(大きさのみが異なる)、他車両22の進行方向に対する、光スポットa1と光スポットb1を結ぶ直線の角度は一定である。
【0096】
従って、以上より、A+B=0を満たす場合の自車両21と他車両22との角度θは、光スポットの投影位置に関わらず一定であり、自車両21は予めこの角度を知っている。つまり、自車両21はA+B=0の場合、自車両21と他車両22との角度θを求めることができる。また、A+B<0の場合、Sa1+La1>Sb1+Lb1となるため、自車両21は、図18において、A+B=0を満たす直線の左側(他車両22側)に存在する。さらにA+B>0の場合、自車両21は、A+B=0を満たす直線の右側(他車両22の反対側)に存在する。
【0097】
また、式(15)に示されるCの値によって、他車両22が自車両21の右側から接近中か左側から接近中かを判別することができる。すなわち、C>0の場合、Lb2>Lb1+Sb1−Sb2となる。Sb1とSb2との差はLb1とLb2との差に比べて十分小さい。従って、この場合,自車両21から光スポットb2までの距離の方が、自車両21から光スポットb1までの距離より大きいため、他車両22は自車両21の左側に存在する(自車両21は光スポットb1及びb2から等距離にある直線の左側に存在する)ことがわかる。逆に、C<0の場合、他車両22は自車両21の右側に存在することがわかる。また、C=0の場合、自車両21は、光スポットb1及び光スポットb2からほぼ等しい位置、すなわち、光スポットb1及び光スポットb2を結んだ線分の垂直2等分線上に存在する。従って、この場合、自車両21は、他車両22と対向して走行中か、他車両22と並行して走行中である。そして、このCの値により、図18で示されるA+B=0を満たす2本の直線のどちらに自車両21が存在するかがわかる。すなわち、A+B=0の場合において、Cの値が0に近いとき、自車両21は、他車両22の進行方向と並行に近い矢印で示された直線上に存在することになる。従って、自車両21と他車両22との角度θを求めることができる。
【0098】
以上のように、各光スポットの検出時間間隔Δtと光パルスを照射する時間間隔βとの時間のずれに基づいて、自車両21が、A+B=0を満たす直線上に存在するのか、当該直線の右側あるいは左側に存在するのかがわかる。上記では、他車両22が4つの光スポットを形成する場合について述べたが、他車両22がより多くの光スポットを形成する場合、同様の方法により、各光スポットの検出時間間隔Δtと光パルスを照射する時間間隔βとの時間のずれを求めることによって、自車両21と他車両22との角度θを正確に求めることができる。
【0099】
図21は、他車両22が右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnを形成する場合において、図18と同様の方法で自車両21と他車両22との角度θを求める方法を示した図である。自車両21は、各光スポットの検出時間間隔のずれ(上記A、B、C、・・・)を算出する。算出された検出時間間隔のずれから、以下の式を満たす光スポットai及びbjを求める。
Lai−Lbj+Sai−Sbj=0 式(21)
ただし、i=1〜n、j=1〜nである。また、Sai(m)は、他車両22から右スキャンの光スポットaiまでの距離を示し、Lai(m)は、光スポットaiから自車両21までの距離を示す。また、Sbj(m)は、他車両22から左スキャンの光スポットbjまでの距離を示し、Lbj(m)は、光スポットbjから自車両21までの距離を示す。自車両21は、光スポットaiと光スポットbjとを結んだ直線と上述した方法により求められた直線(式(20’)による2本の直線)との角度、及び、光スポットaiと光スポットbjの配置を予め知っている。また、各スキャンに含まれる光スポットの検出時間間隔のずれ(上記ではCの値)により、自車両21が光スポットaiとbjとを結んだ直線の右側に存在するか、左側に存在するかが、わかる。従って、上記ai、bjを求めることによって、自車両21と他車両22との角度θを求めることができる。なお、式(21)を満たす光スポットai及びbjが存在しない場合、すなわち、自車両21が図21に示す矢印の直線上にない場合、式(21)の左辺が最も0に近い光スポットai及びbjを求めることにより、自車両21と他車両22との角度θの範囲を求めることができる。
【0100】
次に、本実施形態に係る周辺監視装置の処理の流れについて、図22を参照して説明する。図22は、第3の実施形態に係る周辺監視装置の処理の流れを示すフローチャートである。図22に示される処理は、自車両21が他車両22の光スポットを検出し、上記各光スポットの検出時間間隔のずれ(A、B、C・・)が求められた後、実行される。なお、説明を簡単にするため、図22では、図18に示すように、他車両22が形成する光スポットは4つであることとする。
【0101】
まず、ステップS101において、各光スポットの検出時間間隔のずれA、B、Cのうちの最大の値が、所定の値x1より小さいか否かが判定される。ここで所定の値x1は、予め定められた検出時間間隔のずれの最大値である。上述のように、検出時間間隔のずれは、光投影パターンの大きさによって変化する。検出時間間隔のずれが非常に大きい場合(判定結果がNoの場合)、光投影パターンの大きさが非常に大きく他車両22と投影位置との距離が非常に大きいことを示す。従って、自車両21と他車両22とは衝突する可能性が低いと考えられるため、ステップS103に処理を進め、後の処理を終了する。判定結果がYesの場合、ステップS102の処理が実行される。
【0102】
ステップS102において、所定の光スポットの検出時間間隔のずれA及びCの最大値が所定の値x2より大きいか否かが判定される。この判定において、自車両21と他車両22との角度θが、非常に大きい(角度が180度に近い)又は非常に小さい(角度が0度に近い)範囲にあるか否かが判定される。ここで所定の値x2は、予め定められた検出時間間隔のずれの最小値である。検出時間間隔のずれAが非常に小さい場合(判定結果がNoの場合)、自車両21は、光スポットa1及びa2からの距離がほぼ同じ位置に存在している。すなわち、自車両21は、他車両22と並行に近い状態で走行中か(角度が非常に小さい)、他車両22と対向して走行中か(角度が非常に大きい)のどちらかである。検出時間間隔のずれCが非常に小さい場合も同様である。従って、この場合、自車両21と他車両22とはすれ違う可能性が高いと考えられるため、ステップS104に処理を進め、後の処理を終了する。判定結果がYesの場合、ステップS105の処理が実行される。なお、ステップS102での判定において、検出時間間隔のずれBが判定の対象となっていないのは、以下のような理由からである。すなわち、Bは、光スポットa2と光スポットb1との検出時間間隔のずれを示すからである。このBが所定の値x2より小さい場合は、自車両21と他車両22との角度θは直角に近く、上記範囲(角度が非常に大きい又は小さい範囲)にはない。角度θが上記範囲にある場合、Bは、大きくなる。従って、上記のような角度の範囲か否かを判定する場合において、他車両22から見て進行方向に前後した光スポット間の検出時間間隔のずれBが除外される。すなわち、ステップS102においては、右スキャンの各光スポット(a1〜an)の検出時間間隔のずれ、及び、左スキャンの各光スポット(b1〜bn)の検出時間間隔のずれが、判定の対象とされ、例えば光スポットanと光スポットb1との検出時間間隔のずれは、判定の対象とはされない。
【0103】
ステップS103において、他車両22から光投影パターンまでの距離が遠いため、自車両21と他車両22とは衝突する可能性が低いと判断され、処理は終了する。
【0104】
ステップS104において、自車両21と他車両22とは衝突する可能性が低いと判断され、処理は終了する。
【0105】
ステップS105において、検出時間間隔のずれCが0より大きいか否かが判定される。ここで、Cは、光スポットb1とb2との検出時間間隔のずれを示す。Cが0より大きい場合(判定結果がYesの場合)、他車両22は自車両21の左側から接近中である。Cが0より小さい場合(判定結果がNoの場合)、他車両22は自車両21の右側から接近中である。判定結果がYesの場合、ステップS106の処理がなされる。判定結果がNoの場合、ステップS108の処理がなされる。なお、ここでの判定において、例えば、光スポットa1とa2との検出時間間隔のずれが比較されてもよい。
【0106】
ステップS106において、検出時間間隔のずれA、B及びCに基づいて、自車両21と他車両22との角度θが算出される。角度θの算出方法は上述した通りである。右スキャン及び左スキャンの光スポットがそれぞれ3つ以上ある場合、各光スポットの検出時間間隔のずれに基づいて、上記角度θの値又は角度θの範囲が算出される。なお、ステップS108において、ステップS106と同様の処理が行われるが、Cの値によって上記角度θの値が定まる(図18に示されるA+B=0を満たす2本の直線のどちらかが定まる)。
【0107】
ステップS107において、検出時間間隔のずれ及び自車両21と他車両22との角度θに基づいて、光投影パターンの大きさが求められ、他車両22から光スポットの投影位置までの距離が求められる。検出時間間隔のずれから光投影パターンの大きさを求める方法は、第1の実施形態で述べた方法である。検出時間間隔のずれから求められる光投影パターンの大きさは、自車両21と他車両22との角度により変化するため、ステップS106において求められた角度θにより補正される。そして、補正された光投影パターンの大きさに基づいて、他車両22から投影位置までの距離が算出される。
【0108】
ステップS108において、ステップS106と同様、検出時間間隔のずれA、B及びCに基づいて、自車両21と他車両22との角度θが算出される。
【0109】
ステップS109において、ステップS107と同様、検出時間間隔のずれ及び自車両21と他車両22との角度θに基づいて、他車両22から光スポットの投影位置までの距離が求められる。
【0110】
以上により、求められた他車両22から光スポットの投影位置までの距離、及び、自車両21と他車両22との角度θを求めることができる。そして、求められた上記距離及び角度により、周辺監視装置は自車両21と他車両22との衝突可能性を判断することが可能である。
【0111】
なお、本実施形態では、他車両22から光スポットの投影位置までの距離を光投影パターンの大きさに対応させたが、他車両22が投影位置に到達するまでの到達時間を対応させてもよい。そして、他車両22の到達時間を求めることにより、自車両21と他車両22との衝突可能性を判断してもよい。
【0112】
また、他車両22は、光スポットの投影位置までの距離を光投影パターンの大きさに対応させず、他車両22から所定距離の位置に一定の大きさの光投影パターンを路面上に形成してもよい。この場合、自車両21は、自車両21から見た光投影パターンの形状に基づいて、上記角度θを測定する。そして、角度θが上記範囲(角度が非常に大きい又は小さい範囲)の場合に衝突しないと判断してもよい。また、他車両22がピッチ運動することによって、光投影パターンが他車両22から所定の位置よりも遠い位置に形成された場合、光投影パターンの大きさは、上記所定距離の位置に投影された場合よりも大きくなる。従って、検出される光投影パターンの大きさが所定の大きさよりも大きい場合(図22のステップS101の判定)、自車両21は、他車両22は遠い位置に存在するため、衝突しないと判断してもよい。一方、角度θが上記範囲にあり、かつ、光投影パターンの大きさが上記所定の大きさよりも小さい場合、自車両21と他車両22との距離は近く、出会い頭の衝突の可能性があるため、自車両21は衝突すると判断してもよい。
【0113】
また、本実施形態では、光スポットの検出時間間隔のずれにより、上記角度θを求めたが、他の実施形態では、自車両21から見える光投影パターンの形状により、上記角度θを求めても良い。例えば、受光素子13が空間分解能を有する受光素子に置換される。受光素子における各光スポットの位置とそれぞれが受光されるタイミングとに基づいて、各光スポットの位置関係が求められる。そして、求められた位置関係から自車両21がどの方向から光スポットを検出したかがわかる。
【0114】
また、第1の実施形態と同様、他車両22が路面上に形成する光のパターンは、線状のパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、上記投影領域が形成されてもよい。上記パターンを光ブランク領域により形成してもよい。
【産業上の利用可能性】
【0115】
以上のように、本発明では、簡単な方法で、精度よく他車両の位置を測定することができ、例えば、車両に搭載される周辺監視装置として利用することができる。
【図面の簡単な説明】
【0116】
【図1】第1の実施形態に係る周辺監視装置の構成を示すブロック図
【図2】照射手段が、自車両から光スポットの投影位置までの距離を光投影パターンの大きさに対応させて、光パルスを照射する様子を示した図
【図3】自車両が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合、路面上に形成される光スポットの投影位置を示した図
【図4】自車両が進行方向の所定位置に複数組の光スポットを形成する様子を示した図
【図5】自車両が、他車両が形成した光スポットを検出領域Rで検出することにより、他車両から光スポットの投影位置までの距離を求める様子を示した図
【図6A】スキャンアクチュエータ19を側方から見た図
【図6B】スキャンアクチュエータ19を下面に平行な面で切ったA−A線端面図
【図7】ポリゴンミラーを回転させた場合に形成される光スポットのパターンを説明する図
【図8】他車両が照射した右スキャンの複数の光パルスが、自車両の検出領域で反射し、自車両により検出される様子を示した図
【図9】右スキャンの3つの光パルスが出射されてから自車両で検出されるまでの時間の遅れを模式的に示した図
【図10】他車両が照射した左スキャンの複数の光パルスが、自車両の検出領域で反射し、自車両により検出される様子を示した図
【図11】左スキャンの3つの光パルスが出射されてから自車両で検出されるまでの時間の遅れを模式的に示した図
【図12】第1の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図
【図13】光スポットの検出時間を求める方法を示した図
【図14】第2の実施形態における照射手段が形成する光スポットのパターンを示した図
【図15】他車両が円周上に右スキャンの光スポットと左スキャンの光スポットを形成し、自車両が光スポットを検出する様子を示した図
【図16】第2の実施形態における光スポットの検出時間間隔と検出時刻の関係を示した図
【図17】第3の実施形態における照射手段が形成する光スポットのパターンを示した図
【図18】自車両と他車両とがある角度θをもって走行中の場合に他車両が形成した光スポットを自車両が検出する様子を示した図
【図19】他車両から各光パルスが出射されてから自車両で検出するまでの時間の遅れを模式的に示した図
【図20】A+B=0を満たす点(x,y)を示した図
【図21】他車両が右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnを形成する場合において、図18と同様の方法で自車両と他車両との角度θを求める方法を示した図
【図22】第3の実施形態に係る周辺監視装置の処理の流れを示すフローチャート
【符号の説明】
【0117】
1 周辺監視装置
2 検出手段
3 測定手段
4 照射手段
5 衝突判断手段
11 レンズ
12 フィルタ
13 受光素子
16 ビーム発生器
17 ビーム整形レンズ
18 偏光整形器
19 スキャンアクチュエータ
21 自車両
22 他車両
61 ポリゴンミラー
62 反射鏡
【技術分野】
【0001】
本発明は、車両用の周辺監視装置に関し、より特定的には、他車両によって路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置に関する。
【背景技術】
【0002】
従来、他車両が光ビームを照射することによって路面上に形成された光投影パターンを検出することにより、自車両と他車両との衝突可能性を判定する周辺監視装置が存在する。例えば、特許文献1に記載の装置では、自車両及び他車両が光ビームを照射して所定の光投影パターンを路面上に形成し、自車両及び他車両によって形成された光投影パターンをカメラで検知することによって、自車両と他車両との衝突可能性を判定している。具体的には、車両(自車両及び他車両)は、車両の車速、運動状態量、舵角、及び操舵力に基づいて車両が走行すると推定される走行軌道を算出する。次に、その走行軌道を車両が走行した場合に車体が通過する領域を算出し、その領域と車体が通過しない領域との境界線上に光ビームを照射する。これにより、車両は、2本の線状の光投影パターンを路面上に形成する。そして、自車両により路面上に形成された光ビームと他車両により路面上に形成された光投影パターンとが干渉する(線状光ビームが交差する)場合、自車両と他車両とが衝突する可能性があると判定し、運転者に注意を喚起する等の処理を行う。
【特許文献1】特開2003−231450号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記装置では、自車両と他車両との光投影パターンが交差するか否かを判定するために、カメラで撮影した画像を解析する処理等の複雑な処理を行う必要がある。このような複雑な処理を行う場合、処理に時間がかかり衝突判断が遅れる場合や複雑な処理を行うための処理能力の高いハードウェアが必要となりコストが高くなる場合がある。また、自車両と他車両との衝突可能性を精度よく判断するためには、自車両と他車両との位置関係を精度よく測定することが好ましい。
【0004】
それ故、本発明の目的は、簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記課題を解決するために、以下の構成を採用した。すなわち、第1の発明は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光投影パターンが形成される投影位置と該他車両の位置との位置関係を光投影パターンの大きさに対応させて形成した光投影パターンを検出する、測定手段は、検出手段で検出された光投影パターンの大きさに基づいて、投影位置と他車両との位置関係を測定する。
【0006】
この発明によれば、他車両が路面上に形成した光投影パターンを自車両が検出することにより、他車両と該他車両が形成した光投影パターンの投影位置との位置関係を求めることができる。すなわち、他車両は、上記位置関係を光投影パターンの大きさに対応させて、上記光投影パターンを路面上に形成する。自車両は、他車両が形成した光投影パターンの大きさを求める。これにより、自車両は、上記投影位置と他車両との位置関係を求めることができる。
【0007】
本発明において、他車両は、投影位置と他車両との位置関係として該他車両から投影位置までの距離を光投影パターンの大きさに対応させ、他車両から投影位置までの距離と光投影パターンの大きさとの比が一定になるように光ビームを照射してもよい。この場合において、測定手段は、光投影パターンの大きさを測定し、該測定結果に基づいて、他車両から投影位置までの距離を算出する。
【0008】
この構成によれば、他車両から光投影パターンの投影位置までの距離を正確に求めることができる。すなわち、他車両は、他車両から投影位置までの距離と光投影パターンの大きさとの比が一定になるように、光ビームを照射する。これにより、他車両がピッチ運動により上下方向に傾き、光投影パターンの投影位置が変化した場合においても、他車両から投影位置までの距離の変化に応じて光投影パターンの大きさも変化するため、自車両は、光投影パターンの大きさを求めることにより、他車両から投影位置までの距離を正確に求めることができる。
【0009】
本発明において、他車両は、投影位置と他車両との位置関係として該他車両が投影位置に到達するまでの到達時間を光投影パターンの大きさに対応させ、該到達時間と光投影パターンの大きさとの比が一定になるように光ビームを照射してもよい。この場合において、測定手段は、光投影パターンの大きさを測定し、該測定結果に基づいて、到達時間を算出してもよい。
【0010】
この構成によれば、他車両が光投影パターンの投影位置に到達するまでの時間を正確に求めることができる。すなわち、他車両は、他車両が投影位置に到達するまでの時間と光投影パターンの大きさとの比が一定になるように、光ビームを照射する。これにより、他車両がピッチ運動により上下方向に傾き、光投影パターンの投影位置が変化した場合においても、他車両が投影位置に到達するまでの時間の変化に応じて光投影パターンの大きさも変化するため、自車両は、光投影パターンの大きさを求めることにより、他車両が投影位置に到達するまでの時間を正確に求めることができる。
【0011】
本発明において、光投影パターンは、所定の時間間隔で複数の光パルスを照射することにより路面上に形成された複数の光スポットであってもよい。
【0012】
この構成によれば、他車両が路面に光スポットを形成することにより、自車両は他車両とその光スポットの投影位置との位置関係を求めることができる。
【0013】
本発明において、測定手段は、検出手段で検出した複数の光スポットの検出時間間隔に基づいて光投影パターンの大きさを算出してもよい。
【0014】
この構成によれば、自車両は、検出手段により検出された複数の光スポット間の時間間隔に基づいて光投影パターンの大きさを算出することができる。これにより、自車両は、上記投影位置と他車両との位置関係を求めることができる。
【0015】
本発明において、他車両は、光スポットとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成してもよい。この場合において、測定手段は、検出手段で検出した第1のパターン列に含まれる複数の光スポットの検出時間間隔と第2のパターンに含まれる複数の光スポットの検出時間間隔との差に基づいて、前記光投影パターンの大きさを算出する。また、第2のパターン列は、第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは異なる方向に形成される。
【0016】
この構成によれば、自車両が、第1のパターン列の検出時間間隔と第2のパターン列の検出時間間隔との差を求めることにより、光投影パターンの大きさを求めることができる。
【0017】
本発明において、第1のパターン列は、所定の楕円の一部の周上に形成され、第2のパターン列は、該楕円の周上の第1のパターン列とは異なる位置に形成されてもよい。
【0018】
この構成によれば、自車両の進行方向に対する他車両の進行方向の角度に関わらず、自車両は光投影パターンの大きさを求めることができる。これにより、自車両は、他車両と投影位置との位置関係を求めることができる。
【0019】
本発明において、測定手段は、検出手段で検出した第1のパターン列及び第2のパターン列に含まれる光スポットの検出時間間隔に基づいて、自車両と他車両との角度を測定してもよい。
【0020】
この構成によれば、第1のパターン列の光スポットの時間間隔を測定し、第2のパターン列の光スポットの時間間隔を測定することによって、自車両と他車両との角度を求めることができる。
【0021】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。
【0022】
この構成によれば、測定手段により測定された他車両の位置に基づいて、自車両と他車両との衝突を予測することができる。
【0023】
本発明の第2の発明は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が路面上の所定の領域に形成した光投影パターンを検出する。測定手段は、検出手段で検出された、自車両から見た光投影パターンに基づいて、自車両の進行方向に対する他車両の進行方向の角度を測定する。
【0024】
この発明によれば、他車両が路面上に形成した光投影パターンを自車両が検出することにより、自車両と他車両との角度を測定することができる。
【0025】
本発明において、他車両は、光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に複数の光スポットを所定の配置で形成してもよい。この場合において、測定手段は、検出手段で検出した複数の光スポットの自車両から見た配置に基づいて、角度を測定してもよい。
【0026】
この構成によれば、自車両は、他車両が形成した光スポットのパターンを検出することにより、自車両の進行方向に対する他車両の進行方向の角度を求めることができる。
【0027】
本発明において、測定手段は、検出手段で検出した複数の光スポットの検出時間間隔に基づいて上記角度を算出してもよい。
【0028】
この構成によれば、自車両は、検出手段により検出された複数の光スポット間の時間間隔に基づいて自車両の進行方向に対する他車両の進行方向の角度を算出することができる。
【0029】
本発明において、他車両は、光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成してもよい。この場合において、測定手段は、検出手段で検出した第1のパターン列に含まれる複数の光スポットの検出時間間隔と第2のパターン列に含まれる複数の光スポットの検出時間間隔とに基づいて、上記角度を算出する。また、第2のパターン列は、第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは異なる方向に形成される。
【0030】
この構成によれば、自車両が、第1のパターン列の検出時間間隔と第2のパターン列の検出時間間隔とを測定することにより、自車両の進行方向に対する他車両の進行方向の角度を求めることができる。
【0031】
本発明において、第1のパターン列は、他車両の進行方向に対して略直角に形成され、第2のパターン列は、複数の光スポットを照射順に結んだ軌跡の方向が第1のパターン列とは逆方向に形成されてもよい。
【0032】
この構成によれば、他車両の進行方向に対して略直角に形成された光スポットを自車両が検出し、各光スポットの検出時間間隔に基づいて、他車両と投影位置との位置関係及び他車両と自車両との角度を求めることができる。
【0033】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。
【0034】
この構成によれば、測定手段により測定された他車両の位置に基づいて、自車両と他車両との衝突を予測することができる。
【0035】
本発明において、衝突判断手段は、検出手段で検出された光投影パターンの大きさが所定の大きさ以上の場合、衝突しないと判断してもよい。
【0036】
この構成によれば、自車両は、検出手段で検出された光投影パターンの大きさが所定の大きさ以上の場合、他車両と投影位置との距離が所定以上離れていると判断することができる。従って、自車両は衝突しないと判断することができる。
【0037】
本発明において、測定手段による測定情報に基づいて、自車両と他車両との衝突を判断する衝突判断手段をさらに備えてもよい。衝突判断手段は、検出手段で検出した複数の光スポットの検出時間間隔と上記所定の時間間隔とのずれが所定の範囲にない場合、衝突しないと判断してもよい。
【0038】
この構成によれば、他車両と投影位置との距離が所定以上離れている場合、上記検出時間間隔のずれは、大きくなる。この場合、自車両と他車両とは衝突する可能性が低い。また、自車両と他車両とが対向して走行中の場合や並走している場合、上記検出時間間隔のずれは、小さくなる。この場合、自車両と他車両とはすれ違う可能性が高い。従って、上記検出時間間隔のずれが所定の範囲にない場合、自車両は、自車両と他車両とは衝突しないと判断することができる。
【0039】
本発明において、他車両は、投影位置に形成される光投影パターンを1組として、該他車両からの距離が互いに異なる位置に複数組の光投影パターンを形成してもよい。
【0040】
この構成によれば、他車両が形成した複数組の光投影パターンのうち、1組を自車両が検出することにより、自車両は他車両とその組の光投影パターンの投影位置との位置関係を求めることができる。
【0041】
第3の発明は、他車両が光を照射することにより他車両の位置を測定する周辺監視装置である。周辺監視装置は、検出手段と、測定手段とを備える。検出手段は、自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が光の一部を遮蔽することにより路面上に形成した光が照射されない複数の光ブランク投影パターンを検出する。測定手段は、検出手段で検出された光ブランク投影パターンの大きさに基づいて、投影位置と該他車両との位置関係を測定する。他車両は、投影位置と他車両の位置との位置関係を光ブランク投影パターンの大きさに対応させて、光ブランク投影パターンを形成する。
【0042】
この構成によれば、路面上に形成される光ブランク投影パターンにより、自車両は、他車両と光ブランク投影パターンの投影位置との位置関係を求めることができる。
【0043】
本発明において、光ブランク投影パターンは、光の一部を遮蔽することにより路面上に形成された複数の光ブランクスポットであってもよい。
【0044】
この構成によれば、他車両が光ブランク投影パターンとして、光ブランクスポットを路面上に形成することにより、自車両は、他車両と光ブランク投影パターンの投影位置との位置関係を求めることができる。
【発明の効果】
【0045】
他車両が該他車両と光投影パターンの投影位置との位置関係を光投影パターンの大きさに対応させて路面上に形成した光投影パターンを、自車両が検出することにより、自車両は他車両と上記投影位置との位置関係を求めることができる。
【発明を実施するための最良の形態】
【0046】
(第1の実施形態)
以下、図1から図13を参照して、第1の実施形態に係る周辺監視装置について説明する。図1は、第1の実施形態に係る周辺監視装置の構成を示すブロック図である。周辺監視装置1は、他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって当該他車両の位置を測定する。図1に示されるように、周辺監視装置1は、検出手段2と、測定手段3と、照射手段4と、衝突判断手段5とを備える。以下、各部について説明する。
【0047】
(周辺監視装置1の各部の説明)
検出手段2は、自車両進行方向の路面上の所定領域を検出領域として、照射手段4を有する他車両が光を照射することによって当該検出領域に形成した光投影パターンを検出する。本実施形態では、他車両は複数の光パルスを照射することにより、路面上に複数の光スポットを形成する。検出手段2は、レンズ11と、フィルタ12と、受光素子13とを有する。レンズ11は、車両前方の検出領域から入射される光を集光する。フィルタ12は、集光された光のうち、所定の波長の光を透過する。ここで所定の波長の光とは、他車両が照射手段4から照射した光であり、例えば、赤外光である。受光素子13は、フィルタ12が透過した光を受光する。受光素子13は、空間分解能を持たず、受光した光を電気信号に変換する。変換された電気信号は測定手段3へ出力される。以上のようにして、検出領域に形成された光スポットは、レンズ11、フィルタ12、受光素子13を介して検出される。なお、受光素子13は、空間分解能を持つものでもよい。また、検出手段2は、自車両の車速や周辺環境(上り坂や下り坂等)に応じて自車両から検出領域までの距離が変化するように調整されてもよい。
【0048】
測定手段3は、検出手段2で検出された複数の光スポットによって形成される光投影パターンの大きさに基づいて、光スポットが形成された投影位置と他車両との位置関係を測定する。ここで光投影パターンとは、照射手段4を有する他車両が路面上に形成した複数の光スポットを結んでできる路面上の領域の形状である。以下、光投影パターンにより囲まれる路面上の領域を投影領域と呼ぶことがある。例えば、路面上に4つの光スポットが形成され、これらを結ぶと4角形が形成される場合、この4角形で囲まれた領域が投影領域である。測定手段3は、この光投影パターンの大きさ(複数の光スポットのうち、所定の2つの光スポット間距離)から、光スポットの投影位置(光投影パターンの中心位置)と他車両との位置関係を測定する。具体的には、測定手段3は、上記投影位置から他車両までの距離を測定する。なお、後述するように、照射手段4が光パルスではなく、所定時間継続して光ビームを上記位置関係に対応させて照射する場合、路面上には、線状に形成された光投影パターンが形成される。この場合、線状の光投影パターンの大きさから当該光投影パターンの投影位置と他車両との位置関係を測定してもよい。ここで、線状の光投影パターンの大きさとは、光投影パターンによって囲まれる領域の所定の2点を結んだ線分の長さ(例えば、光投影パターンが四角形であれば対角線の長さ)である。また、複数の光スポットが路面上に直線上に形成される場合、これら光スポットを結んだ線分の長さから上記位置関係を測定してもよい。
【0049】
照射手段4は、車両の進行方向の所定位置に所定の時間間隔で複数の光パルスを照射することによって、路面上に複数の光スポットを形成する。照射手段4は、図1に示されるように、ビーム発生器16と、ビーム整形レンズ17と、偏光整形器18と、スキャンアクチュエータ19とを有する。ビーム発生器16は、例えば、半導体レーザ装置で構成され、所定の波長の光を発生させる。本実施形態では、ビーム発生器16は、赤外域の波長の光を発生させる。ビーム発生器16は、光パルスを発生させる。ビーム整形レンズ17は、ビーム発生器16で発生した光ビームを整形する。偏光整形器18は、ビーム整形レンズ17から出力された光ビームの入射面に垂直な成分の一部を反射させることにより光ビームを偏光させる。スキャンアクチュエータ19は、偏光整形器18で偏光された光ビームを所望の方向に出射させる。本実施形態では、スキャンアクチュエータ19とビーム発生器16とを制御することにより、2つのパターンの光スポットを形成する。なお、ビーム発生器16が発生させる光は赤外域の波長の光に限られず、どのような波長の光であってもよい。また、照射手段4は、上記構成に限られず、所定のパターンの光スポットを形成するものであれば、どのような構成でもよい。照射手段4が形成する光スポットのパターンとその形成方法については、後述する。
【0050】
衝突判断手段5は、測定手段3からの測定情報に基づいて、自車両と他車両との衝突を判断する。衝突判断手段5は、測定手段3からの測定情報として、他車両から該他車両が形成した光スポットの投影位置までの距離を取得する。そして、衝突判断手段5は、自車両の速度や検出領域までの距離等の自車両情報と測定手段3が測定した測定情報とに基づいて、他車両と自車両とが衝突するか否かを判断する。自車両から検出領域までの距離と他車両から投影位置までの距離とを比較することにより、衝突可能性を判断する。そして、衝突判断手段5は、衝突可能性が高いと判断した場合、運転者に対して警告等を行う。
【0051】
以上が各部の説明である。次に、図2から図7を参照して、照射手段4が路面上に形成する光スポットについて、詳細に説明する。
【0052】
(照射手段が形成する光スポット)
図2は、照射手段4が、自車両から光スポットの投影位置までの距離を光投影パターンの大きさに対応させて、光パルスを照射する様子を示した図である。照射手段4は、路面上に複数の光スポットを形成する。図2に示されるように、照射手段4は、複数の光パルスを照射することにより、路面上に複数の光スポット(a1〜b2)を形成する。照射手段4は、光スポットの投影位置と自車両21との位置関係を光投影パターンの大きさに対応させて、光パルスを照射する。具体的には、照射手段4は、光スポットの投影位置から自車両21までの距離S(m)を光投影パターンにおける2点間の距離(例えば、4つの光スポットを結んで形成される4角形の対角線の長さd(m))に対応させて、光スポットを路面上に形成する。例えば、図2(a)では、自車両21から光スポットの投影位置までの距離がS1(m)であり、光投影パターンの大きさ、すなわち、光スポットa2とb2との距離はd1(m)である。一方、図2(b)では、自車両21から光スポットの投影位置までの距離がS2(m)であり、光スポットa2’とb2’との距離はd2(m)である。ここで、S1/d1とS2/d2は等しい。すなわち、照射手段4は、自車両21から投影位置までの距離Sと光投影パターンの対角線の長さdとの比が一定になるように、所定の時間間隔で複数の光パルス(図2では4つ)を進行方向の所定位置に照射し、光スポットを形成する。そして、照射手段4は、複数の光スポット(上記では4つ)を1組として、自車両21から所定距離の位置に1組の光スポットを形成し、それとは異なる位置に、別の組の光スポットを形成する。自車両21から各投影位置までの距離と各光投影パターンの大きさとの比は一定である。なお、光投影パターンの大きさと投影位置までの距離との比は必ずしも一定である必要はなく、光投影パターンの大きさと投影位置とが所定の関係で予め対応付けられて、光パルスが照射されてもよい。
【0053】
次に、自車両21が上下方向に傾いた場合に路面上に形成される光スポットについて説明する。図3は、自車両が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合、路面上に形成される光スポットの投影位置を示した図である。図3(a)は、自車両21がピッチ運動しない場合、光パルスが照射される方向を横から見た図である。また、路面を上から見た場合に形成される複数の光スポットが示されている。図3(a)に示されるように、自車両21がピッチ運動しない場合、光スポットは、自車両21から光スポットの投影位置までの距離はS(m)であり、その場合の光投影パターンの大きさはd(m)である。自車両21がピッチ運動した場合、光パルスの出射角度が変動する。従って、本来自車両21から距離Sの位置に照射される光パルスは、異なる位置に照射され、光スポットが形成される。図3(b)は、自車両21がピッチ運動することにより車両前部が上向きに傾いた場合、光パルスが照射される方向を横から見た図である。また、路面を上から見た場合に形成される複数の光スポットが示されている。図3(b)に示されるように、自車両21から出射された光パルスは、自車両21からS’(m)離れた位置に照射される。この場合、路面上に形成される光投影パターンの大きさはd’(m)であり、図3(a)の場合と比較して、大きくなる。
【0054】
ここで、自車両21から出射される各光パルスの自車両21に対する出射角度(自車両21の垂直方向及び水平方向に対する出射角度)は、自車両21の傾きに関わらず、一定である。従って、光投影パターンの大きさd’は、自車両21から投影位置までの距離S’に比例して大きくなる。すなわち、自車両21から投影位置までの距離と光投影パターンの大きさとの比が予め一定になるように光スポットが形成される場合、自車両21がピッチ運動することによって投影位置が変化し、光投影パターンの大きさが変化したときでも、光投影パターンの大きさから自車両21から投影位置までの距離を求めることができる。例えば、自車両21から投影位置までの距離が10(m)の位置に光投影パターンの大きさが1(m)、自車両21から投影位置までの距離が20(m)の位置に光投影パターンの大きさが2(m)となるように、照射手段4は、2組の光スポットを形成する。この場合において、ピッチ運動により自車両21の車両前部が上向きに傾き、本来10(m)先に照射されるはずの光パルスが、20(m)先に照射された場合、路面上に形成される光投影パターンの大きさは、本来1(m)のはずが2(m)に拡大される。従って、自車両21がピッチ運動により傾いた場合でも、その傾きによって光スポットの投影位置と光投影パターンの大きさとが同じ割合で変動する。
【0055】
以上のように、照射手段4は、自車両から投影位置までの距離と光投影パターンの大きさとの比が予め一定になるように複数の光スポット(上記説明では4つ)を1組として、複数組の光スポットを形成する。このような照射手段4を自車両及び他車両が搭載することにより、自車両は、他車両が路面上に形成する光スポットを検出することによって、他車両の位置を正確に求めることができる。
【0056】
なお、他の実施形態では、照射手段4は、自車両から投影位置までの距離に替えて、自車両が投影位置に到達するまでの到達時間を光投影パターンの大きさに対応させて光スポットを形成してもよい。自車両は、他車両が形成した光スポットを検出領域で検出する。自車両から検出領域までの距離は予め定められている。また、自車両は、自車両の速度を車速センサ等から知ることができる。従って、自車両は、車速と検出領域までの距離とに基づいて検出領域までの到達時間を求めることができる。そして、照射手段4は、到達時間と光投影パターンの大きさとの比が一定になるように、複数組の光スポットを路面上の異なる位置に形成する。例えば、照射手段4は、一定速度で走行中の自車両が10(sec)後に到達する位置に光投影パターンの大きさが1(m)である光スポットを形成し、自車両が20(sec)後に到達する位置に光投影パターンの大きさが2(m)である光スポットを形成する。この場合において、他車両が自車両の光スポットを検出し、光投影パターンの大きさが1(m)と算出された場合、他車両は、自車両が投影位置に到達するまでの時間は10(sec)であると算出することができる。また、自車両がピッチ運動によって上下方向に傾いた場合においても、光投影パターンの大きさから到達時間を正確に求めることができる。すなわち、車両前部がピッチ運動によって上方に傾いた場合、光スポットは、本来の投影位置よりも車両の遠方に形成される。例えば、本来10(m)先に形成される光スポットが20(m)先に形成された場合、光投影パターンの大きさは距離に比例して大きくなるため、路面上に形成される光投影パターンは、ピッチ運動しない場合の光投影パターン(10(m)先に形成されるはずの光投影パターン)の大きさの2倍に拡大される。また、20(m)先に到達するまでの到達時間は、速度が一定であれば、10(m)先に到達するまでの時間の2倍になる。従って、自車両がピッチ運動によって上下方向に傾いた場合においても、他車両は、光投影パターンの大きさを測定することによって、自車両が光スポットの投影位置に到達するまでの時間を正確に算出することができる。このようにして求められた到達時間に基づいて、衝突判断を行うことができる。自車両が検出領域に到達するまでの時間を自車両の速度と検出領域までの距離から算出し、測定手段3により取得された他車両が投影位置に到達するまでの到達時間と算出した自車両の到達時間とを比較することにより、衝突可能性を判断する。すなわち、自車両と他車両が検出領域に到達する時間が一致する場合は、自車両と他車両とは衝突する可能性が高い。そして、衝突判断手段5は、衝突可能性が高いと判断した場合、運転者に対して警告等を行う。
【0057】
次に、照射手段4が照射する複数の光パルスにより、路面上に形成される光スポットのパターンについて、説明する。図4は、自車両が進行方向の所定位置に複数組の光スポットを形成する様子を示した図である。図4に示されるように、自車両21は、進路上の所定位置に複数の光スポット(a1〜an及びb1〜bn)を形成する。照射手段4は、所定時間間隔で複数の光パルスを照射する。従って、複数の光スポットは、順番に路面上に形成される。本実施形態では、後述する方法により、光スポットa1からanの順に自車両から見て左側から右側に形成されるパターンの光スポット(以下、右スキャンの光スポットと呼ぶ)と、光スポットb1からbnの順に自車両から見て右側から左側に形成されるパターンの光スポット(以下、左スキャンの光スポットと呼ぶ)とが形成される。図4に示されるように、右スキャンと左スキャンの光スポットがそれぞれ異なる直線上に並び、右スキャンの光スポットを照射順に結んだ軌跡の方向が左スキャンの光スポットを照射順に結んだ軌跡の方向と反対となるように、光スポットが形成される。各直線は互いに平行であり、車両の進行方向に対して直角である。自車両及び照射手段4を有する他車両は、上記パターンの光スポットを路面上に形成しながら走行する。そして、自車両は、他車両が路面上に形成した上記パターンの光スポットを、検出手段2を用いて検出する。
【0058】
図5は、自車両が、他車両が形成した光スポットを検出領域Rで検出することにより、他車両から光スポットの投影位置までの距離を求める様子を示した図である。自車両21は、他車両22が形成する光スポットの光投影パターンの大きさを測定することにより、上記距離を測定することができる。また、他車両22が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合においても、自車両21は、光投影パターンの大きさを測定することにより、他車両22から光スポットの投影位置までの距離を正確に測定することができる。
【0059】
次に、照射手段4が形成する上記右スキャンと左スキャンの光スポットの形成方法について、説明する。照射手段4は、スキャンアクチュエータ19とビーム発生器16とを制御することにより、上記パターンの光スポットを路面上に形成する。スキャンアクチュエータ19は、例えば、ガルバノミラーにより構成される。ガルバノミラーを制御することにより、光パルスの出射方向を制御し、路面上の所定位置に上記パターンの光スポットを形成することができる。また、スキャンアクチュエータ19として、ポリゴンミラーを用いてもよい。以下、ポリゴンミラーを用いて右スキャンと左スキャンの光スポットを形成する方法について、述べる。
【0060】
図6Aから図7を参照して、照射手段4が形成する右スキャンと左スキャンのパターンの光スポットについて説明する。図6A及び図6Bは、スキャンアクチュエータ19の詳細な構成を示す図である。図6Aはスキャンアクチュエータ19を側方から見た図であり、図6Bはスキャンアクチュエータ19を下面に平行な面で切ったA−A線端面図である。なお、図6A及び図6B(及び図7)では、図の左側が車両の前方に対応する。図6A及び図6Bに示されるように、スキャンアクチュエータ19は、ポリゴンミラー61と反射鏡62で構成される。ポリゴンミラー61は、上面と下面及び6つの側面61aから側面61fにより構成された錐台状の形状である。側面61aから側面61fは、平面と多数の平面によって形成される多角面(概曲面と呼ぶ)とが交互に配置される。すなわち、図6Bに示されるように、側面61a、61c及び61eは平面により構成され、側面61b、61d及び61fは概曲面により構成される。ここで、平面により構成される側面61a、61c及び61eをA領域と呼び、概曲面により構成される側面61b、61d及び61fをB領域と呼ぶことにする。また、ポリゴンミラー61は、回転軸61gを中心に時計回りに回転する。B領域の概曲面の曲率は、回転軸61gを中心とした側面により形成される6角形(図6Bの側面61a、61c及び61eを3辺とし、破線を3辺とする6角形)の外接円の曲率よりも大きく設定される。なお、ポリゴンミラー61は、上記構成に限らず、側面にA領域とB領域を有していればどのような形状でもよく、例えば、上面及び下面が8角形で、側面が8面あってもよい。また、A領域とB領域は必ずしも交互に配置されていなくてもよい。
【0061】
ビーム発生器16から発生した光パルスは、反射鏡62で反射され、ポリゴンミラー61の1つの側面、例えば、側面61aに入射する。側面61aに入射した光パルスは、側面61aで反射され、車両の前方に出射される。ここで、各側面61aから61fの車両垂直方向に対する角度γは、各側面61aから61fで異なるように設定される。従って、各側面で反射した光パルスは、車両前方の異なる位置に照射される。例えば、側面61aの角度よりも側面61cの角度の方が大きく設定された場合、側面61cで反射した光パルスの方が、側面61aで反射した光パルスよりも、より遠方に照射される。このように、各側面61の垂直方向に対する角度γが調整されることにより、車両前方の所定距離の位置に光スポットが形成される。次に、ポリゴンミラー61を回転させた場合、照射手段4が形成する光スポットのパターンについて説明する。
【0062】
図7は、ポリゴンミラー61を回転させた場合に形成される光スポットのパターンを説明する図である。図7の(Aa)から(Ac)は、ポリゴンミラー61の回転角に応じてビーム発生器16から光パルスを複数発生させた場合(図では3つのパルス)に、入射光(破線)がポリゴンミラー61のA領域の1面で反射したときの反射光(実線矢印)が出射する方向を示したものである。図7の(Aa)から(Ac)に示されるように、A領域で反射した光パルスの反射方向は、ポリゴンミラー61の回転方向と同じ方向に変化する。これらA領域の1つの面で反射した複数の光パルスにより、路面上に光スポットが形成される。これら光スポットは車両から見て左方向から右方向に略直線上に形成される。これが右スキャンの光スポットである。
【0063】
一方、B領域で反射された光パルスは、図7の(Ba)から(Bc)で示されるような方向に出射される。図7の(Ba)から(Bc)は、ポリゴンミラー61の回転角に応じてビーム発生器16から光パルスを複数発生させた場合(ここでは3つのパルス)、入射光(破線)がポリゴンミラー61のB領域の1面で反射したときの反射光(実線矢印)が出射する方向を示したものである。図7の(Ba)で示されるように、B領域はその曲率が6角形の外接円の曲率よりも大きい概曲面であるため、入射光は(Aa)とは反対の方向に反射される。(Bc)においても同様に、入射光は、(Ac)とは反対の方向に反射される。すなわち、B領域で反射した光パルスの反射方向は、ポリゴンミラー61の回転方向と反対の方向に変化する。これらB領域の1つの面で反射した複数の光パルスにより、路面上に光スポットが形成される。これら光スポットは車両から見て右方向から左方向に略直線上に形成される。これが左スキャンの光スポットである。
【0064】
以上のように、スキャンアクチュエータ19が構成されることにより、図4で示された右スキャンと左スキャンのパターンの光スポットが形成される。そして、この2つのパターンの光スポットを1組として、複数組の光スポットが、その投影位置と光投影パターンの大きさとが対応付けられて、形成される。
【0065】
(光投影パターンの大きさの算出方法)
次に、測定手段3が、検出手段2により検出された光スポットから光投影パターンの大きさを算出する方法について、図8から図12を参照して、説明する。この方法では、光の光路差によって生じる各光スポットの検出時間間隔を求めることによって、光投影パターンの大きさを算出する。
【0066】
図8は、他車両22が照射した右スキャンの複数の光パルスが、自車両21の検出領域で反射し、自車両21により検出される様子を示した図である。図8に示されるように、他車両22は、右スキャンの光パルスとして、3つの光パルスを所定の時間間隔で照射する。ここで、照射される3つの光パルスの時間間隔をβ(sec)とする。他車両22から出射された1つ目の光パルスは、光スポットa1を路面上に形成し、路面で反射する。そして、反射された光パルスは、自車両21で検出される。この1つ目の光パルスは、他車両22から光スポットa1の位置までの距離Sa1(m)と光スポットa1から自車両21までの距離La1(m)を進む。従って、1つ目の光パルスは、他車両22から出射された時刻からこれらの距離Sa1+La1を光が進む時間だけ遅れて、自車両21で検出される。1つ目の光パルスが出射されてからβ(sec)後に2つ目の光パルスが出射される。2つ目の光パルスは、他車両22から出射し、距離Sa2(m)を進んだ後、光スポットa2を形成する。そして、2つ目の光パルスは、距離La2(m)を進んだ後、自車両21で検出される。従って、2つ目の光パルスは、他車両22から出射された時刻から距離Sa2+La2を光が進む時間だけ遅れて、自車両21で検出される。さらに、3つ目の光パルスも、2つ目の光パルスからβ(sec)後に出射される。3つ目の光パルスも同様に、光スポットa3を形成して自車両21で検出されるまでに距離Sa3(m)と距離La3(m)を進むため、他車両22から出射された時刻から距離Sa3+La3を光が進む時間だけ遅れて、自車両21で検出される。このように、他車両22から出射された3つの光パルスは、出射された時刻から少しだけ遅れて自車両21で検出される。従って、自車両21で検出される3つの光スポットの時間間隔は、時間間隔βとは異なる。
【0067】
図9は、右スキャンの3つの光パルスが出射されてから自車両21で検出されるまでの時間の遅れを模式的に示した図である。図9において、縦軸は光の強さを示し、横軸は時刻を示す。図9(a)は、他車両22から3つの光パルスが出射された時刻を示す。図9(b)は、他車両22から出射された3つの光パルスが路面で反射した時刻を示す。図9(c)は、他車両22から出射された3つの光パルスが自車両21で検出された時刻を示す。まず、他車両22は、光スポットa1を形成する光パルスを出射する(図9(a))。光スポットa1は、光が距離Sa1を進む時間だけ遅れて路面上に形成される(図9(b))。そして、光が距離La1を進む時間だけさらに遅れて、自車両21は光パルスを検出する(図9(c))。従って、光スポットa1を形成する光パルスが出射された時刻を0とすると、自車両21は、時刻(Sa1+La1)/cで光スポットa1を検出する。ここで、cは光速である。同様にして、光スポットa2は、時刻β+(Sa2+La2)/cで検出される。また、光スポットa3も、同様にして、時刻2β+(Sa3+La3)/cで検出される。従って、光スポットa1と光スポットa2との検出時間間隔Δta1は、Δta1=β−(La1−La2)/c+(Sa2−Sa1)/cとなる。同様に、光スポットa2と光スポットa3との検出時間間隔Δta2は、Δta2=β−(La2−La3)/c+(Sa3−Sa2)/cとなる。ここで、他車両22から光スポットの投影位置までの距離が光スポット間の距離(a1とa2との距離)よりも十分に大きい場合、距離Sa1と距離Sa2との差は無視することができる。従って、上記検出時間間隔Δta1は、以下の式(1)で求められる。
Δta1=β−(La1−La2)/c 式(1)
また、同様に、検出時間間隔Δta2は、以下の式(2)で求められる。
Δta2=β−(La2−La3)/c 式(2)
【0068】
図10は、他車両22が照射した左スキャンの複数の光パルスが、自車両21の検出領域で反射し、自車両21により検出される様子を示した図である。図11は、左スキャンの3つの光パルスが出射されてから自車両21で検出されるまでの時間の遅れを模式的に示した図である。図11において、図9と同様、縦軸は光の強さを示し、横軸は時刻を示す。図10においても、上述の右スキャンの光スポットと同様、各光パルスは、それぞれの光パルスが出射された時刻から遅れて自車両21で検出される。上述した方法と同様に、光スポットb1と光スポットb2との検出時間間隔Δtb1は、以下の式(3)で求められる。
Δtb1=β+(Lb2−Lb1)/c 式(3)
さらに、光スポットb2と光スポットb3との検出時間間隔Δtb2は、以下の式(4)で求められる。
Δtb2=β+(Lb3−Lb2)/c 式(4)
【0069】
上記式(1)から式(4)で求められる検出時間間隔を図に示すと図12になる。図12は、第1の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図である。図12において、縦軸は、光スポットの検出時間間隔Δtを示し、横軸は、時刻を示す。例えば、光スポットa1と光スポットa2との検出時間間隔Δta1は、光スポットa2の検出時刻を横軸の時刻に、Δta1を縦軸の値にして、図12のようにプロットされる。図12で示されるように、右スキャンの光スポットの検出時間間隔Δtaは、光パルスの照射時間間隔βより少しずれた位置に、略直線上にプロットされる。左スキャンの光スポットの検出時間間隔Δtbも、光パルスの照射時間間隔βより少しずれた位置に、略直線上にプロットされる。また、右スキャンの光スポットの検出時間間隔Δtaの方が、左スキャンの光スポットの検出時間間隔Δtbよりも検出時間間隔が小さい。この時間間隔差は、右スキャン及び左スキャンの光スポット間の距離が大きければ大きいほど、大きくなる。すなわち、Δta1とΔtb1との差をΔtab1、Δta2とΔtb2との差をΔtab2とすると、Δtab1及びΔtab2は、式(1)から式(4)より、以下の式(5)及び式(6)で求められる。
Δtab1=(La1−Lb1)/c 式(5)
Δtab2=(Lb3−La3)/c 式(6)
ここで、La2とLb2は等しいとした。また、右スキャンの光スポットを結んだ直線と左スキャンの光スポットを結んだ直線との距離は、他車両22から投影位置までの距離及び自車両21から当該投影位置までの距離と比較して、十分小さいと考えられる。そうすると、右スキャンの光スポット間の距離d2と左スキャンの光スポット間の距離d2’との差は、無視することができる。この場合、La1とLb3はほぼ等しく、Lb1とLa3はほぼ等しい。すなわち、上記Δtab1及びΔtab2は、ほぼ等しくなる。従って、時間間隔差Δtab1は、式(5)から明らかなように、La1とLa3との差、すなわち、光スポットLa1とLa3との間の距離2・d2を光が進む時間を示す。従って、図12のように各光スポットの検出時間間隔をプロットし、右スキャンと左スキャンの時間間隔差を求めることによって、光スポット間の距離(光投影パターンの大きさ)を算出することができる。なお、自車両21は、ある速度で走行しているため、光が各光スポット間を進む時間に自車両21が進む距離及び右スキャンから左スキャンの光スポットが形成されるまでの時間に自車両21が走行する距離を補正して、上記光スポット間の距離を算出する必要がある。
【0070】
なお、光投影パターンの大きさは予め定められているため、上記時間間隔差は、上限値がある。他車両22から投影位置までの距離が最も遠い光スポットの組を自車両21が検出した場合に、上記時間間隔差が最大となる。他車両22のピッチ運動によって車両の前方が上方向に傾いた場合、他車両22は、最も遠い光スポットの組よりもさらに遠い位置に光スポットを形成することがある。この光スポットを自車両21が検出した場合、光投影パターンの大きさは上記上限値よりも大きくなる。従って、検出した光スポットの光投影パターンの大きさが上記上限値よりも大きい場合、他車両22は投影位置から非常に遠い位置に存在し、自車両21と他車両22とは衝突する可能性は低いため、自車両21は、衝突しないと判断してもよい。
【0071】
また、式(1)から式(4)で示される右スキャン又は左スキャンの光スポットの検出時間間隔に基づいて、各光スポット間の距離が算出されてもよい。例えば、式(1)で示されるΔta1は、光スポットLa1とLa2との間の距離d2に応じて変化するため、Δta1を求めることにより光投影パターンの大きさを算出することができる。
【0072】
上記光スポットの検出時間間隔Δtは、例えば、次のようにして求められることができる。図13は、光スポットの検出時間を求める方法を示した図である。この方法では、検出手段2に入射した光パルスが2つに分光され、各フォトダイオードで受光される。2つのフォトダイオードは、所定の周期で交互にマスクされる。例えば、マスクの周期は、10(nsec)に設定される。図13(a)は、出射される光パルスを示した図である。縦軸は光の強度を示し、横軸は時間を示す。図13(a)に示されるように、出射される光パルスは、実際にはある程度の時間にわたって広がりを有している。図13(b)は、各フォトダイオードのマスクのタイミングを示した図であり、ONでマスクし、OFFで受光される。図13(c)は、各フォトダイオードで受光される光を示した図である。検出手段2に入射した光パルスは、2つのフォトダイオードで受光される。2つのフォトダイオードは交互にマスクされるため、図13(c)で示されるように、各フォトダイオードには、光パルスのうちマスクされない時間に応じた光だけ受光される。従って、図13(c)で示されるフォトダイオード1及びフォトダイオード2の三角形の面積比を求めることによって、受光のタイミングtを求めることができる。図13では、2つの三角形の面積が等しいため、光パルスはマスクの1/2周期で受光されたことが分かる。このようにして、各光スポットの受光のタイミングを求めることができ、各光スポットの受光タイミングの差から光スポットの検出時間間隔Δtを求めることができる。なお、他の方法においては、各光スポットの検出時刻を正確に測定することによって、各光スポットの検出時間間隔を求めてもよい。
【0073】
以上のようにして、光スポットの時間間隔差から光投影パターンの大きさを求めることができ、光投影パターンの大きさから光スポットの投影位置から他車両22までの距離を求めることができる。求められた距離(又は到達時間)により、自車両21と他車両22とが衝突するか否かを判断することができる。
【0074】
なお、本実施形態では、自車両21の進行方向に対する他車両22の進行方向の角度が図8に示されるように直角である場合を想定したが、自車両21と他車両22とがある角度θをもって走行中である場合、自車両21から各光スポットまでの距離が異なるため、上記時間間隔差が角度θによって変化する。従って、自車両21と他車両22との角度θを求め、その角度θによって生じる変化を補正する必要がある。自車両21と他車両22との角度θは、例えば、各光スポットの検出時間間隔のずれにより求められる。角度θを求める方法については、後述する。
【0075】
また、他車両22が路面上に形成する光投影パターンは、点状の光スポットではなく、光ビームを継続して照射することにより光ビームの軌跡が描かれ、路面上に形成される線状のパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、上記投影領域が形成されてもよい。
【0076】
また、光スポットに替えて、一部の光を遮蔽することによって形成される、光ブランク投影パターンであってもよい。他車両22が(ヘッドライト等の)一部を遮蔽した光を照射し、路面上に光が照射される領域と照射されない領域(光ブランク領域)を形成する。この形成された光ブランク領域が、光ブランク投影パターンである。さらに光ブランク投影パターンは、点状のブランク領域によって形成される光ブランクスポットであってもよい。
【0077】
また、本実施形態では、光スポットの検出時間間隔から光投影パターンの大きさを算出したが、他の方法によって光投影パターンの大きさを算出してもよい。例えば、距離画像の技術を用いて路面に形成された光スポット間の距離を算出してもよい。
【0078】
(第2の実施形態)
次に、第2の実施形態について、図14から図16を参照して、説明する。第2の実施形態に係る周辺監視装置は、第1の実施形態に係る周辺監視装置1と同様の構成であるため、説明を省略する。
【0079】
第2の実施形態では、照射手段4が形成する光投影パターンが、第1の実施形態とは異なる。図14は、第2の実施形態における照射手段が形成する光スポットのパターンを示した図である。図14に示されるように、照射手段4は、各光スポットが所定の半径を持つ円の円周上に形成されるように、光パルスを照射する。そして、照射手段4は、円を形成する光スポットを1組の光スポットとして、路面上の異なる位置に複数組の光スポットを形成する。第1の実施形態と同様、光スポットの投影位置(光スポットによって形成される円の中心)と光投影パターンの大きさ(当該円の半径r)との比が一定になるように、各組の光スポットが形成される。このように、光スポットが円周上に形成されることによって、自車両21と他車両22とがある角度θをもって走行中の場合(自車両21がP2の位置)においても、角度θに関係なく光投影パターンの大きさを求めることができる。以下、詳細に説明する。なお、このようなパターンの光スポットは、スキャンアクチュエータ19として、ガルバノミラーを用いることによって形成することができる。
【0080】
図15は、他車両22が円周上に右スキャンの光スポットと左スキャンの光スポットを形成し、自車両21が光スポットを検出する様子を示した図である。他車両22は、右スキャンの光スポット(a1〜an)を他車両22の左側から右側に向かって円Cの円周上に反時計回りに形成し、左スキャンの光スポット(b1〜bn)を他車両22の右側から左側に向かって円Cの円周上に反時計周りに形成する。なお、説明のため、自車両21がP1の位置にある場合(自車両21と他車両22が直角の場合)を想定する。右スキャンの1番目の光スポットa1は、円Cの中心Oを通り、かつ、他車両22の進行方向に対して直角の直線と円Cとの交点に形成される。右スキャンのn番目の光スポットanは、a1とは反対側の交点に形成される。また、左スキャンの1番目の光スポットb1は、光スポットanの位置に形成され、左スキャンのn番目の光スポットbnは、光スポットa1の位置に形成される。
【0081】
光スポットa1及びbnから他車両22までの距離をSとし、光スポットa1及びbnから自車両21までの距離をLとする。他車両22から出射した右スキャンの1つ目の光パルスは、距離Sと距離Lを進んだ後、自車両21で受光される。従って、1つ目の光パルスは、他車両22から出射してから(S+L)/c(sec)後に自車両21で受光される。
【0082】
右スキャンの2つ目の光パルスは、円Cの円周上に光スポットa2を形成する。光スポットa1と中心Oとを結んだ線分と、光スポットa2と中心Oとを結んだ線分とがなす角度をτとする。他車両22から光スポットa2までの距離をS’とし、光スポットa2から自車両21までの距離をL’とする。他車両22から出射した右スキャンの2つ目の光パルスは、距離S’と距離L’を進んだ後、自車両21で受光される。従って、2つ目の光パルスは、1つ目の光パルスの出射からβ(sec)後に出射され、他車両22から出射してから(S’+L’)/c(sec)後に自車両21で受光される。ここで、距離S’及び距離L’は以下の式(7)及び式(8)で求められる。
S’=S−r・sinτ 式(7)
L’=L−(r−r・cosτ) 式(8)
これより、2つ目の光パルスは、他車両22から出射してから以下の式(9)に示される時間だけ遅れて自車両21で受光される。
(S+L−r・(sinτ−cosτ+1))/c(sec) 式(9)
従って、光スポットa1とa2との検出時間間隔Δta1は、以下の式(10)で求められる。
Δta1=β−r・(sinτ−cosτ+1))/c 式(10)
同様に、光スポットa3は、他車両22から出射されてから以下の式(11)に示される時間だけ遅れて自車両21で受光される。
(S+L−r・(sinτ2−cosτ2+1))/c(sec) 式(11)
ただし、τ2は、光スポットa1と中心Oとを結んだ線分と、光スポットa3と中心Oとを結んだ線分とがなす角度である。従って、光スポットa3とa2との検出時間間隔Δta2は、以下の式(12)で求められる。
Δta2=β−r・((sinτ2−cosτ2)−(sinτ−cosτ))/c 式(12)
同様にして、光スポットa4〜an及びb1〜bnまでの検出時刻を求め、各光スポットの検出時間間隔Δtを算出する。式(10)及び式(12)から明らかなように、検出時間間隔Δtは、円Cの半径rを振幅とする周期関数である。従って、このようにして算出された検出時間間隔Δtを図にプロットすると、図16のような曲線を描く。図16は、第2の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図である。図16において、横軸は時刻を示し、縦軸は検出時間間隔を示す。このようにして求められた曲線の振幅の大きさは、円Cの半径rに依存する。従って、振幅の大きさを求めることにより、円Cの半径rを求めることができる。
【0083】
次に、図15において、自車両21が位置P2にある場合について説明する。自車両21が位置P2にある場合、自車両21と他車両22とは直角とは異なる角度θをもって走行中である。位置P2にある自車両21が、他車両22が形成する光スポットを検出した場合、上述したように光の光路長の差から各光スポットの検出時間間隔Δtが変化する。位置P2にある自車両21が光スポットを見た場合、光スポットは円C上に形成されるため、光スポットは、位置P1にある場合と同じ配置で形成されたように見える。すなわち、各光スポットの照射順を無視すると、円周上に形成された光スポットは、どの角度から見ても同じに見える。従って、上述したように、各光スポットの検出時間間隔Δtを求め、グラフにプロットすると、図16のような曲線が得られる。そして、得られた曲線の振幅の大きさを求めることにより、円Cの半径rを求めることができる。なお、自車両21と他車両22とが直角とは異なる角度θをもっている場合、図16に示される曲線は、右または左にずれることになる。すなわち、光スポットはa1〜an、b1〜bnの順に形成されるため、図15に示されるように、自車両21が位置P1にある場合と、位置P2にある場合とでは、始点が異なる。ここで始点とは、自車両21から見た光スポットa1が形成される位置をいう。
【0084】
以上のようにして、各光スポットの検出時間間隔Δtを求め、検出時間間隔Δtの振幅の大きさを求めることによって、円Cの半径r、すなわち、光投影パターンの大きさを求めることができる。これによって、自車両21と他車両22との角度θに関係なく、自車両21は、他車両22から投影位置までの距離(又は他車両22が投影位置に到達するまでの到達時間)を求めることができる。また、他車両22が上下方向に傾いた場合でも、自車両21は、他車両22から投影位置までの距離を求めることができる。
【0085】
なお、本実施形態においては、光スポットは円周上に形成されることとしたが、楕円上に形成されてもよい。光スポットが楕円上に形成された場合においても、各光スポットの検出時間間隔Δtは、周期関数となり、当該関数の振幅の大きさを求めることで光投影パターンの大きさを求めることができる。また、図15において、右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnのそれぞれで円Cの半円を描いたが、図14に示されるように円の一部が描かれてもよい。
【0086】
また、第1の実施形態と同様、他車両22が路面上に形成する光のパターンは、点状の光スポットではなく、線状に円が描かれたパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、円状の投影領域が形成されてもよい。また、第1の実施形態と同様、上記パターンを光ブランク領域により形成してもよい。
【0087】
(第3の実施形態)
次に、第3の実施形態について、図17から図22を参照して、説明する。第3の実施形態に係る周辺監視装置は、第1の実施形態に係る周辺監視装置1と同様の構成であるため、説明を省略する。
【0088】
第3の実施形態では、照射手段4が形成する光投影パターンが、第1の実施形態とは異なる。図17は、第3の実施形態における照射手段が形成する光スポットのパターンを示した図である。図17に示されるように、右スキャンの光スポット及び左スキャンの光スポットは、自車両21の進行方向に対して斜めに形成される。これによって、各光スポットを結んでできる領域(光投影パターン)の自車両21から見た形状に基づいて、自車両21と他車両22との角度θを求めることができる。すなわち、図17に示されるように、他車両22は、複数の光スポットを1組として、複数組の光スポットを路面上に形成しながら走行する。各組の光スポットが形成する光投影パターンの形状は、他車両22からの距離に関係なく同じであり、他車両22からの距離に比例してその大きさが大きくなる。従って、自車両21から見た光投影パターンの形状は、自車両21と他車両22との角度θによって異なるため、自車両21から見た光投影パターンの形状(光投影パターンの傾き)を求めることで、上記角度θを求めることができる。このような光スポットのパターンは、ガルバノミラーにより形成することが可能である。また、ガルバノミラーとポリゴンミラーとを組み合わせることによっても形成可能である。
【0089】
なお、本実施形態では、図17で示されるような配置で光スポットを形成したが、第1の実施形態において形成したような配置(図4を参照)で光スポットを形成するようにしてもよい。すなわち、第1の実施形態と同様、右スキャンと左スキャンの光スポットがそれぞれ直線上に並び、右スキャンの光スポットを照射順に結んだ軌跡の方向が左スキャンの光スポットを照射順に結んだ軌跡の方向と反対となるように、光スポットが形成されてもよい。
【0090】
本実施形態では、各光スポットを検出し、その検出された各光スポットの時間間隔に基づいて、自車両21と他車両22との角度θを求めることとする。以下、自車両21と他車両22との角度を求める方法について、詳細に説明する。
【0091】
図18は、自車両21と他車両22とがある角度θをもって走行中の場合に他車両22が形成した光スポットを自車両21が検出する様子を示した図である。図18に示されるように、他車両22が、4つの光パルスを時間間隔βで照射することにより、4つの光スポットがa1、a2、b1、b2の順に路面上に形成される。光スポットa1から他車両22までの距離をSa1(m)、光スポットa1から自車両21までの距離をLa1(m)とする。同様に、光スポットa2から、他車両22までの距離をSa2(m)、自車両21までの距離をLa2(m)とする。さらに、光スポットb1から他車両22までの距離をSb1(m)、自車両21までの距離をLb1(m)とし、光スポットb2から他車両22までの距離をSb2(m)、自車両21までの距離をLb2(m)とする。このような場合、各光パルスが他車両22から出射されてから自車両21で検出するまでに、各光パルスは、それぞれの光路長に応じた時間だけ遅れる。
【0092】
図19は、他車両22から各光パルスが出射されてから自車両21で検出するまでの時間の遅れを模式的に示した図である。図19において、横軸は時刻を示し、縦軸は光の強さを示す。図19に示されるように、各光スポットが検出される時刻は、それぞれの光パルスが出射されてから各光路長を進む時間だけ遅れる。従って、各光スポットの検出時間間隔Δtは、光パルスが照射される時間間隔βと異なる。光スポットa1とa2との検出時間間隔をΔt1、光スポットa2とb1との検出時間間隔をΔt2、光スポットb1とb2との検出時間間隔をΔt3とすると、以下の式(13)〜式(15)で求められる。
Δt1=β+(La2−La1+Sa2−Sa1)/c=β+A 式(13)
Δt2=β+(Lb1−La2+Sb1−Sa2)/c=β+B 式(14)
Δt3=β+(Lb2−Lb1+Sb2−Sb1)/c=β+C 式(15)
ただし、A=(La2−La1+Sa2−Sa1)/c、B=(Lb1−La2+Sb1−Sa2)/c、C=(Lb2−Lb1+Sb2−Sb1)/cとした。式(13)及び式(14)、式(14)及び式(15)から以下の式(16)及び式(17)が得られる。
A+B=(Lb1−La1+Sb1−Sa1)/c 式(16)
B+C=(Lb2−La2+Sb2−Sa2)/c 式(17)
【0093】
上記式(16)において、A+B=0の場合、以下の式(18)となる。
La1−Lb1=Sb1−Sa1 式(18)
ここで、距離Sa1及び距離Sb1は、自車両21の位置に関わらず常に一定である。すなわち、A+B=0の場合、自車両21から光スポットa1までの距離La1と自車両21から光スポットb1までの距離Lb1との差が常に一定となる。従って、A+B=0を満たす場合、自車両21は、自車両21から光スポットa1までの距離La1と自車両21から光スポットb1までの距離Lb1との差が一定となる位置に存在することになる。
【0094】
次に、A+B=0を満たす自車両21の位置を求める。図20は、A+B=0を満たす点(x,y)を示した図である。ここで、光スポットa1と光スポットb1との距離をd(m)とする。光スポットa1は原点に位置し、光スポットb1は座標(d,0)に位置している。La1−Lb1が一定となる点(x,y)は、以下の式(19)を満たす。
【数1】
ここで、Sb1−Sa1=d1(m)とした。上記式(19)をxについて解くと、以下の式(20)が得られる。
【数2】
式(20)から明らかなように、A+B=0を満たす点、すなわち、La1とLb1との差が一定である点(x,y)は、曲線を描く。ここで、上記式(20)において、4d12y2/(d2−d12)がd12に比べて十分に大きい範囲では、d12は無視できるため、式(20)は以下の式(20’)に近似できる。
【数3】
式(20’)より、yが大きい範囲では、A+B=0を満たす点の集合は直線になる。d1及びdは、光投影パターンの大きさを示しており、yは、2つの光スポットを結んだ線分から自車両21までの距離を示している。自車両21は、自車両21の検出領域で他車両22の光スポットを検出する。通常、自車両21から検出領域まではある程度離れており、自車両21から検出領域までの距離は、光投影パターンの大きさ(所定の光スポット間の距離d)に比べて十分に大きい。従って、他車両22の光スポットを検出した自車両21は、式(20’)を満たす直線上に位置することになる。図20では、式(20’)により求められたA+B=0を満たす直線が矢印で示されている。図20に示されるように、yが正の場合と負の場合とでx軸に対称な2本の直線が示されている。また、このようにして求められたA+B=0を満たす直線が、図18において示されている。
【0095】
上記式(20’)によって求められた直線の傾きによって、当該直線と光スポットa1と光スポットb1とを結ぶ直線との角度を求めることができる。また、d1は、他車両22から光スポットb1までの距離Sb1と他車両22から光スポットa1までの距離Sa1との差である(式(19)より)。図18において、他車両22から投影位置までの距離は、光スポットa1と光スポットb1との他車両22の左右方向の距離に比べて十分長いため、d1は、光スポットa1と光スポットb1との他車両22の進行方向の距離d1’とほぼ等しい。また、dは、光スポットa1と光スポットb1との距離である。ここで、他車両22は、光投影パターンの大きさと他車両22から光スポットの投影位置までの距離(又は投影位置に到達するまでの到達時間)との比が一定になるように、複数組の光スポットを形成する。従って、d1とdとの比は常に一定である。また、他車両22がピッチ運動によって上下方向に傾き、光スポットの投影位置が変化した場合においても、d1とdとの比は変わらない。すなわち、式(20’)において、yの係数であるd12/(d2−d12)は、d1又はdの値に関係なく、常に一定である。従って、式(20’)によって求められる直線の傾きは、光投影パターンの大きさに関わらず一定となる。一方、他車両22は、複数の光スポットをその投影位置に関係なく同じ配置で形成するため(大きさのみが異なる)、他車両22の進行方向に対する、光スポットa1と光スポットb1を結ぶ直線の角度は一定である。
【0096】
従って、以上より、A+B=0を満たす場合の自車両21と他車両22との角度θは、光スポットの投影位置に関わらず一定であり、自車両21は予めこの角度を知っている。つまり、自車両21はA+B=0の場合、自車両21と他車両22との角度θを求めることができる。また、A+B<0の場合、Sa1+La1>Sb1+Lb1となるため、自車両21は、図18において、A+B=0を満たす直線の左側(他車両22側)に存在する。さらにA+B>0の場合、自車両21は、A+B=0を満たす直線の右側(他車両22の反対側)に存在する。
【0097】
また、式(15)に示されるCの値によって、他車両22が自車両21の右側から接近中か左側から接近中かを判別することができる。すなわち、C>0の場合、Lb2>Lb1+Sb1−Sb2となる。Sb1とSb2との差はLb1とLb2との差に比べて十分小さい。従って、この場合,自車両21から光スポットb2までの距離の方が、自車両21から光スポットb1までの距離より大きいため、他車両22は自車両21の左側に存在する(自車両21は光スポットb1及びb2から等距離にある直線の左側に存在する)ことがわかる。逆に、C<0の場合、他車両22は自車両21の右側に存在することがわかる。また、C=0の場合、自車両21は、光スポットb1及び光スポットb2からほぼ等しい位置、すなわち、光スポットb1及び光スポットb2を結んだ線分の垂直2等分線上に存在する。従って、この場合、自車両21は、他車両22と対向して走行中か、他車両22と並行して走行中である。そして、このCの値により、図18で示されるA+B=0を満たす2本の直線のどちらに自車両21が存在するかがわかる。すなわち、A+B=0の場合において、Cの値が0に近いとき、自車両21は、他車両22の進行方向と並行に近い矢印で示された直線上に存在することになる。従って、自車両21と他車両22との角度θを求めることができる。
【0098】
以上のように、各光スポットの検出時間間隔Δtと光パルスを照射する時間間隔βとの時間のずれに基づいて、自車両21が、A+B=0を満たす直線上に存在するのか、当該直線の右側あるいは左側に存在するのかがわかる。上記では、他車両22が4つの光スポットを形成する場合について述べたが、他車両22がより多くの光スポットを形成する場合、同様の方法により、各光スポットの検出時間間隔Δtと光パルスを照射する時間間隔βとの時間のずれを求めることによって、自車両21と他車両22との角度θを正確に求めることができる。
【0099】
図21は、他車両22が右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnを形成する場合において、図18と同様の方法で自車両21と他車両22との角度θを求める方法を示した図である。自車両21は、各光スポットの検出時間間隔のずれ(上記A、B、C、・・・)を算出する。算出された検出時間間隔のずれから、以下の式を満たす光スポットai及びbjを求める。
Lai−Lbj+Sai−Sbj=0 式(21)
ただし、i=1〜n、j=1〜nである。また、Sai(m)は、他車両22から右スキャンの光スポットaiまでの距離を示し、Lai(m)は、光スポットaiから自車両21までの距離を示す。また、Sbj(m)は、他車両22から左スキャンの光スポットbjまでの距離を示し、Lbj(m)は、光スポットbjから自車両21までの距離を示す。自車両21は、光スポットaiと光スポットbjとを結んだ直線と上述した方法により求められた直線(式(20’)による2本の直線)との角度、及び、光スポットaiと光スポットbjの配置を予め知っている。また、各スキャンに含まれる光スポットの検出時間間隔のずれ(上記ではCの値)により、自車両21が光スポットaiとbjとを結んだ直線の右側に存在するか、左側に存在するかが、わかる。従って、上記ai、bjを求めることによって、自車両21と他車両22との角度θを求めることができる。なお、式(21)を満たす光スポットai及びbjが存在しない場合、すなわち、自車両21が図21に示す矢印の直線上にない場合、式(21)の左辺が最も0に近い光スポットai及びbjを求めることにより、自車両21と他車両22との角度θの範囲を求めることができる。
【0100】
次に、本実施形態に係る周辺監視装置の処理の流れについて、図22を参照して説明する。図22は、第3の実施形態に係る周辺監視装置の処理の流れを示すフローチャートである。図22に示される処理は、自車両21が他車両22の光スポットを検出し、上記各光スポットの検出時間間隔のずれ(A、B、C・・)が求められた後、実行される。なお、説明を簡単にするため、図22では、図18に示すように、他車両22が形成する光スポットは4つであることとする。
【0101】
まず、ステップS101において、各光スポットの検出時間間隔のずれA、B、Cのうちの最大の値が、所定の値x1より小さいか否かが判定される。ここで所定の値x1は、予め定められた検出時間間隔のずれの最大値である。上述のように、検出時間間隔のずれは、光投影パターンの大きさによって変化する。検出時間間隔のずれが非常に大きい場合(判定結果がNoの場合)、光投影パターンの大きさが非常に大きく他車両22と投影位置との距離が非常に大きいことを示す。従って、自車両21と他車両22とは衝突する可能性が低いと考えられるため、ステップS103に処理を進め、後の処理を終了する。判定結果がYesの場合、ステップS102の処理が実行される。
【0102】
ステップS102において、所定の光スポットの検出時間間隔のずれA及びCの最大値が所定の値x2より大きいか否かが判定される。この判定において、自車両21と他車両22との角度θが、非常に大きい(角度が180度に近い)又は非常に小さい(角度が0度に近い)範囲にあるか否かが判定される。ここで所定の値x2は、予め定められた検出時間間隔のずれの最小値である。検出時間間隔のずれAが非常に小さい場合(判定結果がNoの場合)、自車両21は、光スポットa1及びa2からの距離がほぼ同じ位置に存在している。すなわち、自車両21は、他車両22と並行に近い状態で走行中か(角度が非常に小さい)、他車両22と対向して走行中か(角度が非常に大きい)のどちらかである。検出時間間隔のずれCが非常に小さい場合も同様である。従って、この場合、自車両21と他車両22とはすれ違う可能性が高いと考えられるため、ステップS104に処理を進め、後の処理を終了する。判定結果がYesの場合、ステップS105の処理が実行される。なお、ステップS102での判定において、検出時間間隔のずれBが判定の対象となっていないのは、以下のような理由からである。すなわち、Bは、光スポットa2と光スポットb1との検出時間間隔のずれを示すからである。このBが所定の値x2より小さい場合は、自車両21と他車両22との角度θは直角に近く、上記範囲(角度が非常に大きい又は小さい範囲)にはない。角度θが上記範囲にある場合、Bは、大きくなる。従って、上記のような角度の範囲か否かを判定する場合において、他車両22から見て進行方向に前後した光スポット間の検出時間間隔のずれBが除外される。すなわち、ステップS102においては、右スキャンの各光スポット(a1〜an)の検出時間間隔のずれ、及び、左スキャンの各光スポット(b1〜bn)の検出時間間隔のずれが、判定の対象とされ、例えば光スポットanと光スポットb1との検出時間間隔のずれは、判定の対象とはされない。
【0103】
ステップS103において、他車両22から光投影パターンまでの距離が遠いため、自車両21と他車両22とは衝突する可能性が低いと判断され、処理は終了する。
【0104】
ステップS104において、自車両21と他車両22とは衝突する可能性が低いと判断され、処理は終了する。
【0105】
ステップS105において、検出時間間隔のずれCが0より大きいか否かが判定される。ここで、Cは、光スポットb1とb2との検出時間間隔のずれを示す。Cが0より大きい場合(判定結果がYesの場合)、他車両22は自車両21の左側から接近中である。Cが0より小さい場合(判定結果がNoの場合)、他車両22は自車両21の右側から接近中である。判定結果がYesの場合、ステップS106の処理がなされる。判定結果がNoの場合、ステップS108の処理がなされる。なお、ここでの判定において、例えば、光スポットa1とa2との検出時間間隔のずれが比較されてもよい。
【0106】
ステップS106において、検出時間間隔のずれA、B及びCに基づいて、自車両21と他車両22との角度θが算出される。角度θの算出方法は上述した通りである。右スキャン及び左スキャンの光スポットがそれぞれ3つ以上ある場合、各光スポットの検出時間間隔のずれに基づいて、上記角度θの値又は角度θの範囲が算出される。なお、ステップS108において、ステップS106と同様の処理が行われるが、Cの値によって上記角度θの値が定まる(図18に示されるA+B=0を満たす2本の直線のどちらかが定まる)。
【0107】
ステップS107において、検出時間間隔のずれ及び自車両21と他車両22との角度θに基づいて、光投影パターンの大きさが求められ、他車両22から光スポットの投影位置までの距離が求められる。検出時間間隔のずれから光投影パターンの大きさを求める方法は、第1の実施形態で述べた方法である。検出時間間隔のずれから求められる光投影パターンの大きさは、自車両21と他車両22との角度により変化するため、ステップS106において求められた角度θにより補正される。そして、補正された光投影パターンの大きさに基づいて、他車両22から投影位置までの距離が算出される。
【0108】
ステップS108において、ステップS106と同様、検出時間間隔のずれA、B及びCに基づいて、自車両21と他車両22との角度θが算出される。
【0109】
ステップS109において、ステップS107と同様、検出時間間隔のずれ及び自車両21と他車両22との角度θに基づいて、他車両22から光スポットの投影位置までの距離が求められる。
【0110】
以上により、求められた他車両22から光スポットの投影位置までの距離、及び、自車両21と他車両22との角度θを求めることができる。そして、求められた上記距離及び角度により、周辺監視装置は自車両21と他車両22との衝突可能性を判断することが可能である。
【0111】
なお、本実施形態では、他車両22から光スポットの投影位置までの距離を光投影パターンの大きさに対応させたが、他車両22が投影位置に到達するまでの到達時間を対応させてもよい。そして、他車両22の到達時間を求めることにより、自車両21と他車両22との衝突可能性を判断してもよい。
【0112】
また、他車両22は、光スポットの投影位置までの距離を光投影パターンの大きさに対応させず、他車両22から所定距離の位置に一定の大きさの光投影パターンを路面上に形成してもよい。この場合、自車両21は、自車両21から見た光投影パターンの形状に基づいて、上記角度θを測定する。そして、角度θが上記範囲(角度が非常に大きい又は小さい範囲)の場合に衝突しないと判断してもよい。また、他車両22がピッチ運動することによって、光投影パターンが他車両22から所定の位置よりも遠い位置に形成された場合、光投影パターンの大きさは、上記所定距離の位置に投影された場合よりも大きくなる。従って、検出される光投影パターンの大きさが所定の大きさよりも大きい場合(図22のステップS101の判定)、自車両21は、他車両22は遠い位置に存在するため、衝突しないと判断してもよい。一方、角度θが上記範囲にあり、かつ、光投影パターンの大きさが上記所定の大きさよりも小さい場合、自車両21と他車両22との距離は近く、出会い頭の衝突の可能性があるため、自車両21は衝突すると判断してもよい。
【0113】
また、本実施形態では、光スポットの検出時間間隔のずれにより、上記角度θを求めたが、他の実施形態では、自車両21から見える光投影パターンの形状により、上記角度θを求めても良い。例えば、受光素子13が空間分解能を有する受光素子に置換される。受光素子における各光スポットの位置とそれぞれが受光されるタイミングとに基づいて、各光スポットの位置関係が求められる。そして、求められた位置関係から自車両21がどの方向から光スポットを検出したかがわかる。
【0114】
また、第1の実施形態と同様、他車両22が路面上に形成する光のパターンは、線状のパターンであってもよい。また、点状の光スポットではなく、上記投影領域全体に対して光を照射することによって、上記投影領域が形成されてもよい。上記パターンを光ブランク領域により形成してもよい。
【産業上の利用可能性】
【0115】
以上のように、本発明では、簡単な方法で、精度よく他車両の位置を測定することができ、例えば、車両に搭載される周辺監視装置として利用することができる。
【図面の簡単な説明】
【0116】
【図1】第1の実施形態に係る周辺監視装置の構成を示すブロック図
【図2】照射手段が、自車両から光スポットの投影位置までの距離を光投影パターンの大きさに対応させて、光パルスを照射する様子を示した図
【図3】自車両が凹凸のある路面上を走行することによって進行方向に対して上下方向にピッチ運動する場合、路面上に形成される光スポットの投影位置を示した図
【図4】自車両が進行方向の所定位置に複数組の光スポットを形成する様子を示した図
【図5】自車両が、他車両が形成した光スポットを検出領域Rで検出することにより、他車両から光スポットの投影位置までの距離を求める様子を示した図
【図6A】スキャンアクチュエータ19を側方から見た図
【図6B】スキャンアクチュエータ19を下面に平行な面で切ったA−A線端面図
【図7】ポリゴンミラーを回転させた場合に形成される光スポットのパターンを説明する図
【図8】他車両が照射した右スキャンの複数の光パルスが、自車両の検出領域で反射し、自車両により検出される様子を示した図
【図9】右スキャンの3つの光パルスが出射されてから自車両で検出されるまでの時間の遅れを模式的に示した図
【図10】他車両が照射した左スキャンの複数の光パルスが、自車両の検出領域で反射し、自車両により検出される様子を示した図
【図11】左スキャンの3つの光パルスが出射されてから自車両で検出されるまでの時間の遅れを模式的に示した図
【図12】第1の実施形態における光スポットの検出時間間隔と検出時刻との関係を示した図
【図13】光スポットの検出時間を求める方法を示した図
【図14】第2の実施形態における照射手段が形成する光スポットのパターンを示した図
【図15】他車両が円周上に右スキャンの光スポットと左スキャンの光スポットを形成し、自車両が光スポットを検出する様子を示した図
【図16】第2の実施形態における光スポットの検出時間間隔と検出時刻の関係を示した図
【図17】第3の実施形態における照射手段が形成する光スポットのパターンを示した図
【図18】自車両と他車両とがある角度θをもって走行中の場合に他車両が形成した光スポットを自車両が検出する様子を示した図
【図19】他車両から各光パルスが出射されてから自車両で検出するまでの時間の遅れを模式的に示した図
【図20】A+B=0を満たす点(x,y)を示した図
【図21】他車両が右スキャンの光スポットa1〜an及び左スキャンの光スポットb1〜bnを形成する場合において、図18と同様の方法で自車両と他車両との角度θを求める方法を示した図
【図22】第3の実施形態に係る周辺監視装置の処理の流れを示すフローチャート
【符号の説明】
【0117】
1 周辺監視装置
2 検出手段
3 測定手段
4 照射手段
5 衝突判断手段
11 レンズ
12 フィルタ
13 受光素子
16 ビーム発生器
17 ビーム整形レンズ
18 偏光整形器
19 スキャンアクチュエータ
21 自車両
22 他車両
61 ポリゴンミラー
62 反射鏡
【特許請求の範囲】
【請求項1】
他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、前記他車両が前記光投影パターンが形成される投影位置と該他車両の位置との位置関係を前記光投影パターンの大きさに対応させて形成した前記光投影パターンを検出する検出手段と、
前記検出手段で検出された前記光投影パターンの大きさに基づいて、前記投影位置と前記他車両との位置関係を測定する測定手段とを備える周辺監視装置。
【請求項2】
前記他車両は、前記投影位置と前記他車両との位置関係として該他車両から前記投影位置までの距離を前記光投影パターンの大きさに対応させ、前記他車両から前記投影位置までの距離と前記光投影パターンの大きさとの比が一定になるように光ビームを照射し、
前記測定手段は、前記光投影パターンの大きさを測定し、該測定結果に基づいて、前記他車両から前記投影位置までの距離を算出することを特徴とする、請求項1に記載の周辺監視装置。
【請求項3】
前記他車両は、前記投影位置と前記他車両との位置関係として該他車両が前記投影位置に到達するまでの到達時間を前記光投影パターンの大きさに対応させ、該到達時間と前記光投影パターンの大きさとの比が一定になるように光ビームを照射し、
前記測定手段は、前記光投影パターンの大きさを測定し、該測定結果に基づいて、前記到達時間を算出することを特徴とする、請求項1に記載の周辺監視装置。
【請求項4】
前記光投影パターンは、所定の時間間隔で複数の光パルスを照射することにより路面上に形成された複数の光スポットであることを特徴とする、請求項1から3のいずれか1項に記載の周辺監視装置。
【請求項5】
前記測定手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔に基づいて前記光投影パターンの大きさを算出することを特徴とする、請求項4に記載の周辺監視装置。
【請求項6】
前記他車両は、前記光スポットとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成し、
前記測定手段は、前記検出手段で検出した前記第1のパターン列に含まれる複数の光スポットの検出時間間隔と前記第2のパターン列に含まれる複数の光スポットの検出時間間隔との差に基づいて、前記光投影パターンの大きさを算出し、
前記第2のパターン列は、前記第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは異なる方向に形成されることを特徴とする、請求項4に記載の周辺監視装置。
【請求項7】
前記第1のパターン列は、所定の楕円の一部の周上に形成され、前記第2のパターン列は、該楕円の周上の前記第1のパターン列とは異なる位置に形成されることを特徴とする、請求項6に記載の周辺監視装置。
【請求項8】
前記測定手段は、前記検出手段で検出した前記第1のパターン列及び前記第2のパターン列に含まれる光スポットの検出時間間隔に基づいて、前記自車両と前記他車両との角度を測定することを特徴とする、請求項6に記載の周辺監視装置。
【請求項9】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備えたことを特徴とする、請求項1から8のいずれか1項に記載の周辺監視装置。
【請求項10】
他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、
前記検出手段で検出された、自車両から見た前記光投影パターンに基づいて、自車両の進行方向に対する他車両の進行方向の角度を測定する測定手段とを備える周辺監視装置。
【請求項11】
前記他車両は、前記光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に複数の光スポットを所定の配置で形成し、
前記測定手段は、前記検出手段で検出した前記複数の光スポットの自車両から見た配置に基づいて、前記角度を測定することを特徴とする、請求項10に記載の周辺監視装置。
【請求項12】
前記測定手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔に基づいて前記角度を算出することを特徴とする、請求項11に記載の周辺監視装置。
【請求項13】
前記他車両は、前記光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成し、
前記測定手段は、前記検出手段で検出した前記第1のパターン列に含まれる複数の光スポットの検出時間間隔と前記第2のパターン列に含まれる複数の光スポットの検出時間間隔とに基づいて、前記角度を算出し、
前記第2のパターン列は、前記第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは異なる方向に形成されることを特徴とする、請求項10に記載の周辺監視装置。
【請求項14】
前記第1のパターン列は、他車両の進行方向に対して略直角に形成され、前記第2のパターン列は、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは逆方向に形成されることを特徴とする、請求項6又は13に記載の周辺監視装置。
【請求項15】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備えたことを特徴とする、請求項10から14のいずれか1項に記載の周辺監視装置。
【請求項16】
前記衝突判断手段は、前記検出手段で検出された前記光投影パターンの大きさが所定の大きさ以上の場合、衝突しないと判断することを特徴とする、請求項9に記載の周辺監視装置。
【請求項17】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備え、
前記衝突判断手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔と前記所定の時間間隔とのずれが所定の範囲にない場合、衝突しないと判断することを特徴とする、請求項5又は11に記載の周辺監視装置。
【請求項18】
前記他車両は、前記投影位置に形成される前記光投影パターンを1組として、該他車両からの距離が互いに異なる位置に複数組の光投影パターンを形成することを特徴とする、請求項1又は10に記載の周辺監視装置。
【請求項19】
他車両が光を照射することにより他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、前記他車両が前記光の一部を遮蔽することにより路面上に形成した前記光が照射されない複数の光ブランク投影パターンを検出する検出手段と、
前記検出手段で検出された前記光ブランク投影パターンの大きさに基づいて、前記投影位置と該他車両との位置関係を測定する測定手段とを備え、
前記他車両は、前記投影位置と前記他車両の位置との位置関係を前記光ブランク投影パターンの大きさに対応させて、前記光ブランク投影パターンを形成することを特徴とする、周辺監視装置。
【請求項20】
前記光ブランク投影パターンは、光の一部を遮蔽することにより路面上に形成された複数の光ブランクスポットであることを特徴とする、請求項19に記載の周辺監視装置。
【請求項1】
他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、前記他車両が前記光投影パターンが形成される投影位置と該他車両の位置との位置関係を前記光投影パターンの大きさに対応させて形成した前記光投影パターンを検出する検出手段と、
前記検出手段で検出された前記光投影パターンの大きさに基づいて、前記投影位置と前記他車両との位置関係を測定する測定手段とを備える周辺監視装置。
【請求項2】
前記他車両は、前記投影位置と前記他車両との位置関係として該他車両から前記投影位置までの距離を前記光投影パターンの大きさに対応させ、前記他車両から前記投影位置までの距離と前記光投影パターンの大きさとの比が一定になるように光ビームを照射し、
前記測定手段は、前記光投影パターンの大きさを測定し、該測定結果に基づいて、前記他車両から前記投影位置までの距離を算出することを特徴とする、請求項1に記載の周辺監視装置。
【請求項3】
前記他車両は、前記投影位置と前記他車両との位置関係として該他車両が前記投影位置に到達するまでの到達時間を前記光投影パターンの大きさに対応させ、該到達時間と前記光投影パターンの大きさとの比が一定になるように光ビームを照射し、
前記測定手段は、前記光投影パターンの大きさを測定し、該測定結果に基づいて、前記到達時間を算出することを特徴とする、請求項1に記載の周辺監視装置。
【請求項4】
前記光投影パターンは、所定の時間間隔で複数の光パルスを照射することにより路面上に形成された複数の光スポットであることを特徴とする、請求項1から3のいずれか1項に記載の周辺監視装置。
【請求項5】
前記測定手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔に基づいて前記光投影パターンの大きさを算出することを特徴とする、請求項4に記載の周辺監視装置。
【請求項6】
前記他車両は、前記光スポットとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成し、
前記測定手段は、前記検出手段で検出した前記第1のパターン列に含まれる複数の光スポットの検出時間間隔と前記第2のパターン列に含まれる複数の光スポットの検出時間間隔との差に基づいて、前記光投影パターンの大きさを算出し、
前記第2のパターン列は、前記第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは異なる方向に形成されることを特徴とする、請求項4に記載の周辺監視装置。
【請求項7】
前記第1のパターン列は、所定の楕円の一部の周上に形成され、前記第2のパターン列は、該楕円の周上の前記第1のパターン列とは異なる位置に形成されることを特徴とする、請求項6に記載の周辺監視装置。
【請求項8】
前記測定手段は、前記検出手段で検出した前記第1のパターン列及び前記第2のパターン列に含まれる光スポットの検出時間間隔に基づいて、前記自車両と前記他車両との角度を測定することを特徴とする、請求項6に記載の周辺監視装置。
【請求項9】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備えたことを特徴とする、請求項1から8のいずれか1項に記載の周辺監視装置。
【請求項10】
他車両が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、他車両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、
前記検出手段で検出された、自車両から見た前記光投影パターンに基づいて、自車両の進行方向に対する他車両の進行方向の角度を測定する測定手段とを備える周辺監視装置。
【請求項11】
前記他車両は、前記光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に複数の光スポットを所定の配置で形成し、
前記測定手段は、前記検出手段で検出した前記複数の光スポットの自車両から見た配置に基づいて、前記角度を測定することを特徴とする、請求項10に記載の周辺監視装置。
【請求項12】
前記測定手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔に基づいて前記角度を算出することを特徴とする、請求項11に記載の周辺監視装置。
【請求項13】
前記他車両は、前記光投影パターンとして、所定の時間間隔で複数の光パルスを照射することにより路面上に線上に並んだ第1のパターン列と第2のパターン列の光スポットを形成し、
前記測定手段は、前記検出手段で検出した前記第1のパターン列に含まれる複数の光スポットの検出時間間隔と前記第2のパターン列に含まれる複数の光スポットの検出時間間隔とに基づいて、前記角度を算出し、
前記第2のパターン列は、前記第1のパターン列とは路面上の異なる位置に、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは異なる方向に形成されることを特徴とする、請求項10に記載の周辺監視装置。
【請求項14】
前記第1のパターン列は、他車両の進行方向に対して略直角に形成され、前記第2のパターン列は、複数の光スポットを照射順に結んだ軌跡の方向が前記第1のパターン列とは逆方向に形成されることを特徴とする、請求項6又は13に記載の周辺監視装置。
【請求項15】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備えたことを特徴とする、請求項10から14のいずれか1項に記載の周辺監視装置。
【請求項16】
前記衝突判断手段は、前記検出手段で検出された前記光投影パターンの大きさが所定の大きさ以上の場合、衝突しないと判断することを特徴とする、請求項9に記載の周辺監視装置。
【請求項17】
前記測定手段による測定情報に基づいて、前記自車両と前記他車両との衝突を判断する衝突判断手段をさらに備え、
前記衝突判断手段は、前記検出手段で検出した前記複数の光スポットの検出時間間隔と前記所定の時間間隔とのずれが所定の範囲にない場合、衝突しないと判断することを特徴とする、請求項5又は11に記載の周辺監視装置。
【請求項18】
前記他車両は、前記投影位置に形成される前記光投影パターンを1組として、該他車両からの距離が互いに異なる位置に複数組の光投影パターンを形成することを特徴とする、請求項1又は10に記載の周辺監視装置。
【請求項19】
他車両が光を照射することにより他車両の位置を測定する周辺監視装置であって、
自車両進行方向の路面上の所定領域を検出領域として、該検出領域に、前記他車両が前記光の一部を遮蔽することにより路面上に形成した前記光が照射されない複数の光ブランク投影パターンを検出する検出手段と、
前記検出手段で検出された前記光ブランク投影パターンの大きさに基づいて、前記投影位置と該他車両との位置関係を測定する測定手段とを備え、
前記他車両は、前記投影位置と前記他車両の位置との位置関係を前記光ブランク投影パターンの大きさに対応させて、前記光ブランク投影パターンを形成することを特徴とする、周辺監視装置。
【請求項20】
前記光ブランク投影パターンは、光の一部を遮蔽することにより路面上に形成された複数の光ブランクスポットであることを特徴とする、請求項19に記載の周辺監視装置。
【図1】

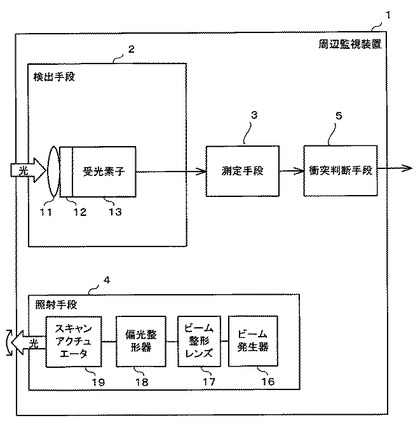
【図2】
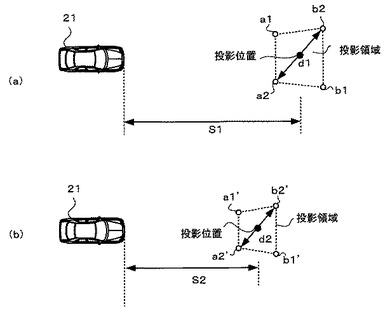
【図3】
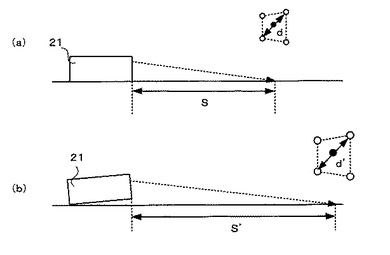
【図4】
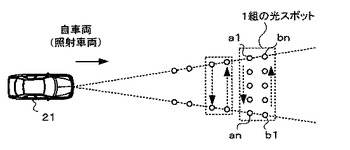
【図5】
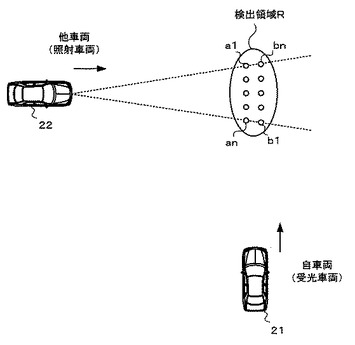
【図6A】
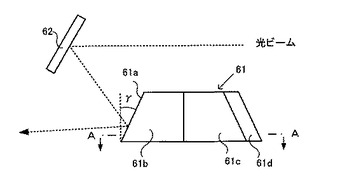
【図6B】
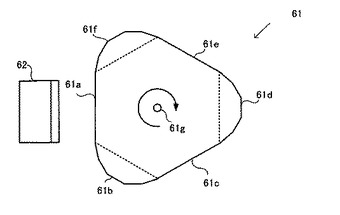
【図7】
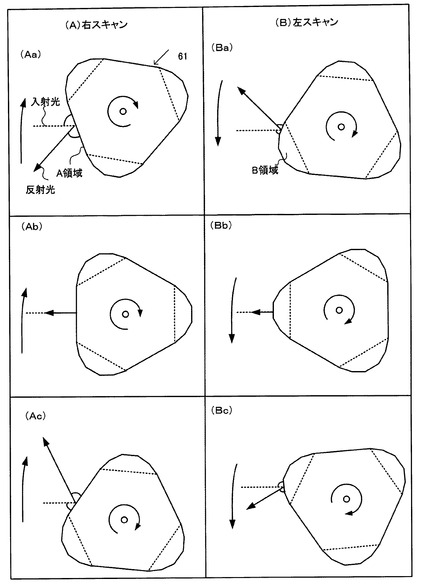
【図8】
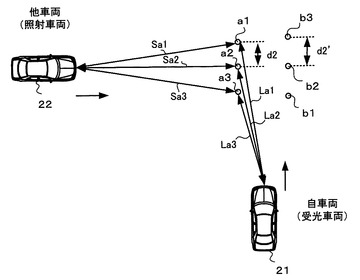
【図9】
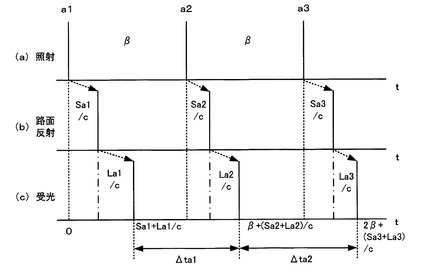
【図10】
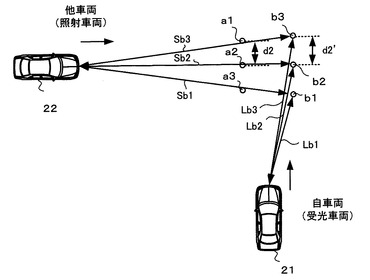
【図11】
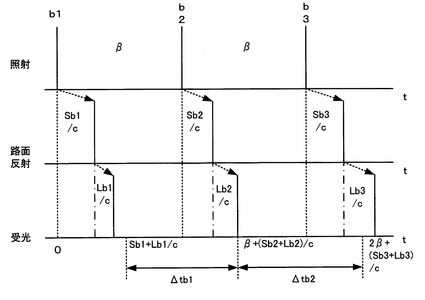
【図12】
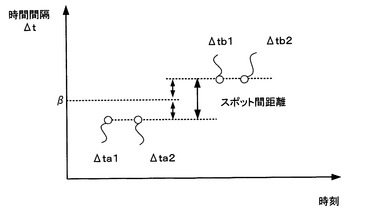
【図13】
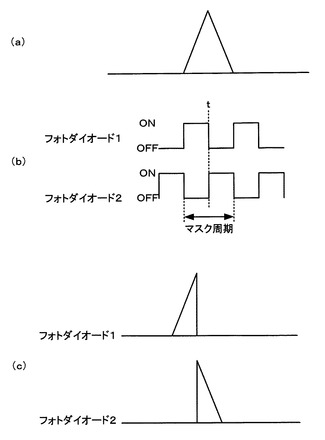
【図14】
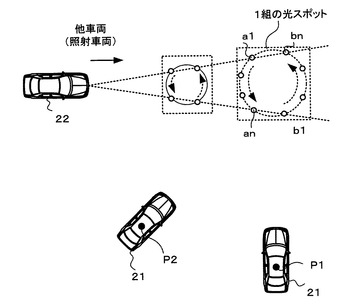
【図15】
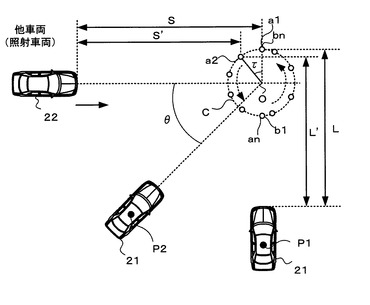
【図16】
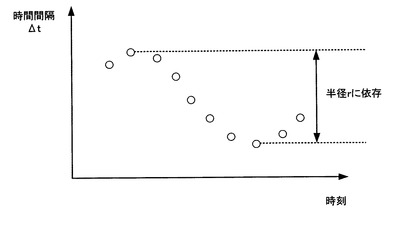
【図17】
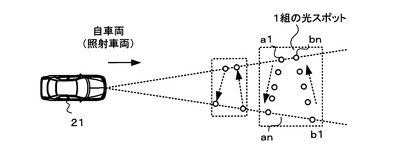
【図18】
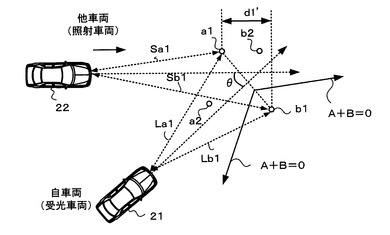
【図19】
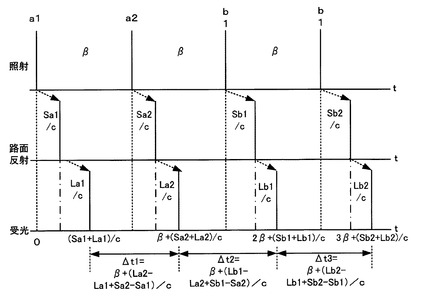
【図20】
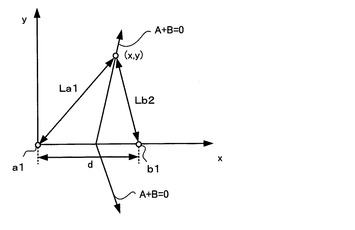
【図21】
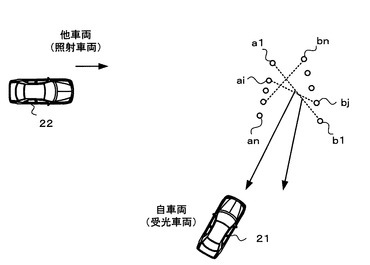
【図22】
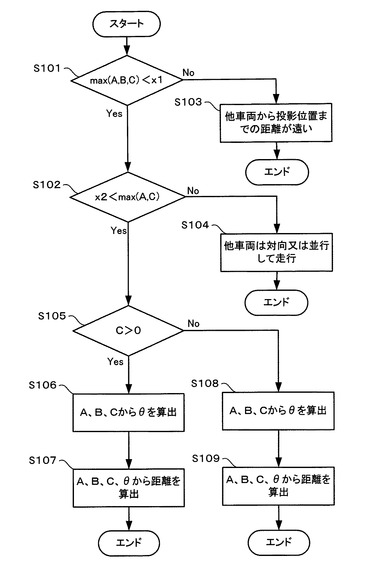
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2010−97354(P2010−97354A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−266781(P2008−266781)
【出願日】平成20年10月15日(2008.10.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月15日(2008.10.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]