
味方認識システム
【課題】味方認識システムの低消費電力化、秘匿性の向上を目的とする。
【解決手段】認識側装置3の質問信号送信部9は質問信号5を送信する。質問範囲整合部10は送信範囲を偵察用カメラの撮影範囲と整合させる。質問信号5を受取る被認識側装置7の受信範囲整合部11は、受け取り範囲を真上向きに質問信号5の送信範囲と整合させる。応答信号送信部14は、光信号の応答信号8を送信する。応答範囲整合部15は、応答信号8の送信範囲を偵察用カメラの撮影範囲とほぼ整合させ、機体が存在する真上方向に送出する。応答信号8は、認識側装置3の視野整合部16を介して受信用カメラ18で受信される。視野整合部16は応答信号8を受け取るが、その受取り範囲は真下向きに応答信号8の送信範囲と整合させる。画像重畳部20は撮影画像21中の味方だけに輝点を重畳する。
【解決手段】認識側装置3の質問信号送信部9は質問信号5を送信する。質問範囲整合部10は送信範囲を偵察用カメラの撮影範囲と整合させる。質問信号5を受取る被認識側装置7の受信範囲整合部11は、受け取り範囲を真上向きに質問信号5の送信範囲と整合させる。応答信号送信部14は、光信号の応答信号8を送信する。応答範囲整合部15は、応答信号8の送信範囲を偵察用カメラの撮影範囲とほぼ整合させ、機体が存在する真上方向に送出する。応答信号8は、認識側装置3の視野整合部16を介して受信用カメラ18で受信される。視野整合部16は応答信号8を受け取るが、その受取り範囲は真下向きに応答信号8の送信範囲と整合させる。画像重畳部20は撮影画像21中の味方だけに輝点を重畳する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上空から撮影した画面に存在する地上目標の中から味方を認識する味方認識システムに関するものである。
【背景技術】
【0002】
目標を照準する照準側の照準スコープの視野内に存在する全ての目標を同時に僚友認識するための僚友認識方法として、照準側が照準側装置を具備し、僚友が被照準側装置を具備する構成のものがある。ここで僚友とは味方のことを意味し、僚友認識とは対称の中から味方を識別して味方を認識することをいう。以下では僚友のことを味方とも言い、僚友認識のことを味方認識とも言う。
この装置において、照準側装置の質問用送信部が、照準スコープの視野の全域に質問信号を送信すると、その視野内にいる僚友が装着する被照準側装置から特定の光信号である応答信号が返信される。照準側装置において、受信用カメラは、応答信号と同じ波長の光のみを透過させるフィルタを有し、フィルタを透過した光により生成される画像を撮影する。画像重畳部は、照準スコープの入射部により入射された光により生成される画像に、受信用カメラにより撮影された画像を重畳する。照準スコープの照準部は、その画像を表示する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−157479号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術による僚友認識装置では、僚友(味方)は質問信号がどの方向から到来するかわからないため、被照準側装置からの応答信号は全周囲に送信する必要があった。このため、応答信号に大きなパワーが必要となり被照準側装置が大型化及び大消費電力化する課題があった。また、全周囲に応答信号を送信するため他者に傍受される可能性が高くなり秘匿性の確保に課題があった。
【課題を解決するための手段】
【0005】
この発明に係る味方認識システムは、飛しょう体に搭載され、前記飛しょう体の真下方向に向けて、所定の視野角で地上の領域を撮像する偵察用撮像装置と、前記視野角と同程度の角度の放射角を有し前記飛しょう体の真下方向に向けて質問信号を送信する質問信号送信部と、前記視野角と同程度の視野角を有し前記飛しょう体の真下方向に撮像方向を向けて、前記質問信号を受信した味方移動体が応答する発光信号を受光してその輝点を撮像する受信用撮像部と、前記輝点に基き味方移動体の位置を検出し、前記偵察用撮像装置が撮像した画像上に前記味方の位置を表わす輝点を重畳する画像重畳部とからなる認識側装置と、を備える飛しょう体搭載装置と、地上を移動する味方の味方移動体に搭載され、前記放射角と同程度の角度の受信角を有し受信する方向を前記味方移動体の真上方向に向けて前記質問信号を受信する受信部と、前記質問信号が味方移動体からのものであるかを判定する制御部と、前記質問信号が味方移動体からのものであると判断した場合に、応答信号として、前記視野角と同程度の角度の放射角で前記味方移動体の真上方向に向けて前記発光信号を送信する応答信号送信部と、を備える味方地上側装置と、からなる。
【発明の効果】
【0006】
本発明によれば、地上にある味方地上側装置が応答信号を送信する領域を制限することができるため、応答信号のパワーを低減でき、味方地上側装置を小型低消費電力化できる効果がある。
また、応答信号の送信する領域を前記のように制限するため他者に傍受される可能性が低減し秘匿性に優れる効果がある。
【図面の簡単な説明】
【0007】
【図1】実施例1に係わる味方認識システムの概要を示す概念図である。
【図2】実施例1に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【図3】実施例2に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【図4】実施例3に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【発明を実施するための形態】
【0008】
実施の形態1.
以下、本発明の実施の形態について、図を用いて説明する。
【0009】
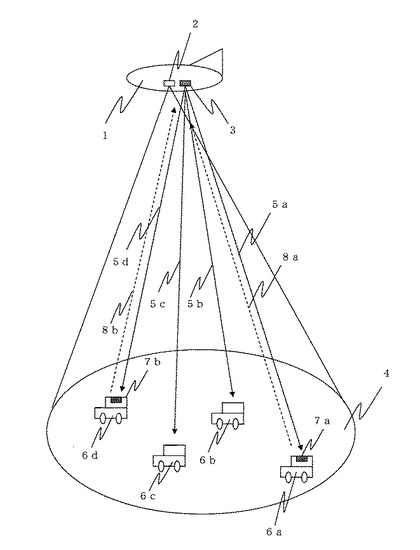
図1は、本実施例に係わる味方認識システムの概要を示す概念図である。味方認識システムは、機体1に搭載された偵察用カメラ2及び認識側装置3からなる機体搭載装置と、地上の移動体に搭載された味方地上側装置7とから構成される。機体1の例として、例えば飛しょう体が挙げられる。
【0010】
図1において、機体(飛しょう体)1は、偵察用カメラ2及び認識側装置3を搭載している。偵察用カメラ2は所定の視野角θをもって機体1の真下方向を撮影し、複数の目標6a〜dを含む領域である撮影範囲4を撮影している。認識側装置3は、複数の目標6a〜dに質問信号5a〜dを送信する。目標6a及び目標6dは、味方であるため味方地上側装置7a及び味方地上側装置7bを搭載しているため、それぞれ応答信号8a及び応答信号8bを返信する。目標6b及び目標6cは、味方でないため味方地上側装置を搭載しておらず応答信号を返信しない。認識側装置3は、応答信号8a及び応答信号8bを受信することで目標6a及び目標6dが味方であることを認識する。
【0011】
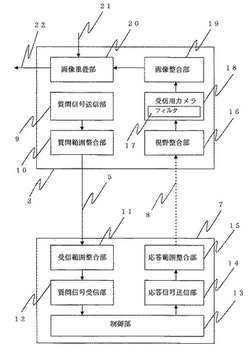
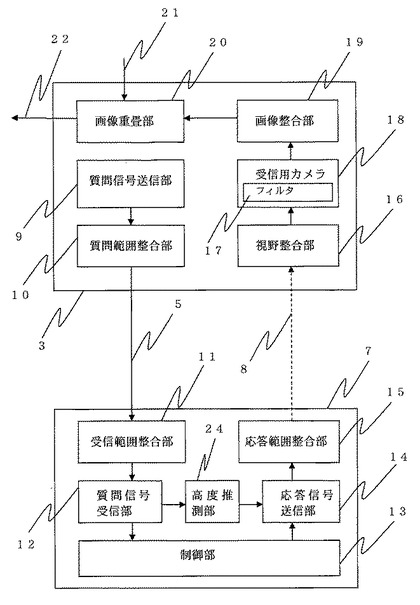
図2は、認識側装置3及び味方地上側装置7の構成を示すブロック図である。
【0012】
認識側装置3は、質問信号送信部9、質問範囲整合部10、視野整合部16、フィルタ17を具備した受信用カメラ18、画像整合部19及び画像重畳部20から構成される。また、味方地上側装置7は、受信範囲整合部11、質問信号受信部12、制御部13、応答信号送信部14及び応答範囲整合部15から構成される。
【0013】
認識側装置3の質問信号送信部9は、質問信号5が電波の場合は送信アンテナと送信機から構成され、また質問信号5が光の場合は送信光学系と送信機から構成され、質問信号5を送信する。質問範囲整合部10は、質問信号5の送信範囲を偵察用カメラ2の撮影範囲4とほぼ整合させ、機体1の真下方向に質問信号5を送出する。すなわち質問範囲整合部10は、偵察用カメラ2の視野角θとほぼ同じ放射角φ(φ≒θ)で、機体1の真下方向に、質問信号5を送出する。
これにより質問信号5は、偵察用カメラ2の撮影範囲4に存在する全ての目標に送信することが可能となる。なお、質問範囲整合部10は、質問信号5が電波の場合は、質問信号送信部9の送信アンテナの指向性を調整する手段であり、質問信号5が光の場合は、質問信号送信部9の送信光学系の倍率を調整する手段である。
【0014】
質問信号5を受け取る味方地上側装置7の受信範囲整合部11は、上方向から到来する質問信号5を受け取るが、その受け取り範囲は味方地上側装置7の真上向きに質問信号5の送信範囲と整合させている。すなわち受信範囲整合部11は、質問範囲整合部10が整合させる質問信号5の放射角φと同じ角度となる受け取り角φで、上方向から到来する質問信号5を受け取るように整合調整する。
これにより質問信号受信部12は、偵察用カメラ2の撮影範囲4のどこに存在しても質問信号5を受信することが可能になるとともに、余計な範囲からの雑音を受け取ることを防ぐことが可能となる。なお、受信範囲整合部11は、質問信号5が電波の場合は、受信アンテナの指向性を調整する手段であり、質問信号5が光の場合は、受信光学系の視野を調整する手段である。質問信号受信部12は、質問信号5が電波の場合は受信アンテナと受信機から構成され、また質問信号5が光の場合は受信光学系と受信機から構成され、質問信号5を受信する。制御部13は、質問信号5を分析し、あらかじめ設定された信号と合致すると応答信号送信部14に応答信号8を送信させる。応答信号送信部14は、送信光学系と送信機から構成され、光信号の応答信号8を送信する。応答範囲整合部15は、応答信号8の送信範囲を偵察用カメラ2の撮影範囲4とほぼ整合させ、機体1が存在する真上方向に応答信号8を送出する。
すなわち、応答範囲整合部15は、偵察用カメラ2の視野角θとほぼ同じ放射角φ(φ≒θ)で、味方地上側装置7の真上方向に、応答信号8を送出する。
これにより、応答信号送信部14は、従来の技術による僚友認識装置のように全周囲に応答信号8を送信する必要がないため、送信出力を抑えることができ、装置の小型・低消費電力化が可能となる。なお、応答範囲整合部15は、応答信号送信部14の送信光学系の倍率を調整する手段である。
【0015】
応答信号8は、認識側装置3の視野整合部16を介して受信用カメラ18で受信される。受信用カメラ18はフィルタ17を応答信号8の受光口に備え、応答信号8の波長の光を選択受信する。このため、不要な太陽等の反射光を軽減でき、受信信号の信号対雑音比を高くできる。視野整合部16は、下方向から到来する応答信号8を受け取るが、その受け取り範囲は真下向きに応答信号8の送信範囲と整合させている。すなわち視野整合部16は、応答範囲整合部15が整合させる応答信号8の放射角φと同じ角度となる受け取り角φで、下方向から到来する応答信号8を受け取るように整合調整を行う。
これにより、受信用カメラ18は、偵察用カメラ2の撮影範囲4に存在する全ての味方からの応答信号8を受信することが可能となる。なお、視野整合部16は、受信用カメラ18の光学系の視野を調整する手段である。受信用カメラ18から出力される撮影画像では、応答信号8を送信している味方の存在する地点が輝点となって現れる。
【0016】
画像整合部19は、受信用カメラ18からの撮影画像のサイズを画像重畳部20において偵察用カメラ2からの撮影画像21と同一撮影地点が重なるよう調整する。画像重畳部20では、偵察用カメラ2からの撮影画像21中に存在する目標のうち、味方だけに受信用カメラ18からの撮影画像中の輝点が重畳される。あるいは、輝点の替わりに味方を表すシンボルを重畳してもよい。画像重畳部20から送出される画像22には、前記のように偵察用カメラ2の撮影画像21中の味方に輝点あるいは味方を表すシンボルが付与されているため、この画像22の観察者は複数の目標の中から一目で味方を認識することが可能となる。
【0017】
実施の形態2.
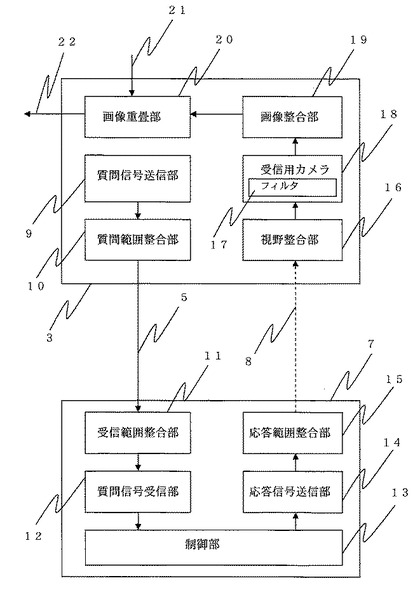
図3は、本実施例に係わる認識側装置3及び味方地上側装置7の構成を示すブロック図である。なお、味方地上側装置7の構成は図2と同様である。
【0018】
図3は、図2の認識側装置3の構成と機体1の高度情報23が質問信号送信部9に入力されることが異なる。質問信号送信部9は、高度情報に応じて質問信号5の送信パワーを、味方地上側装置7の質問信号受信部12が受信可能な最低限度に制御する。これにより質問信号送信部9の低消費電力運用が可能となる。また、質問信号送信部9は高度情報23を質問信号5に含めて送信する。味方地上側装置7の応答信号送信部14は、高度情報に応じて応答信号8の送信パワーを、認識側装置3の受信用カメラ18が受信可能な最低限度に制御する。これにより応答信号送信部14の低消費電力運用が可能となる。なお、その他の動作は実施例1と同様である。
【0019】
実施の形態3.
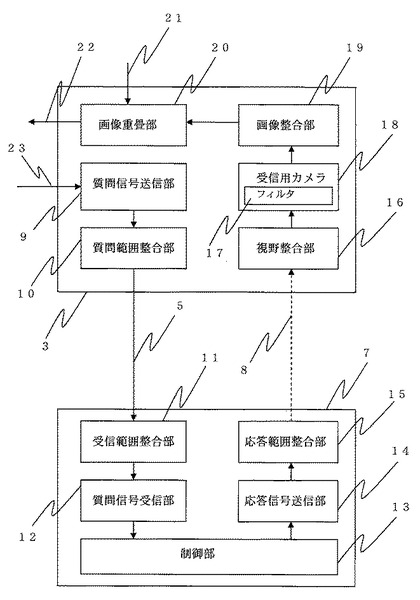
図4は、本実施例に係わる認識側装置3及び味方地上側装置7の構成を示すブロック図である。なお、認識側装置3の構成は図2と同様である。
【0020】
図4は、図2の味方地上側装置7の構成に、高度推測部24を付加したものである。本実施例では、認識側装置3の質問信号送信部9は、常に一定パワーで質問信号5を送信する。味方地上側装置7の高度推測部24は、質問信号受信部12で受信した質問信号5のパワーを測定し、あらかじめ記憶されている質問信号送信部9の送信パワーからの減衰量を求め、この減衰量から機体1の高度を推測する。減衰量から高度の推測は、あらかじめ質問信号5の伝搬距離と減衰量の関係を実測あるいは理論計算により求めておけばよく、測定した減衰量に相当する伝搬距離がここでは機体の高度に相当する。応答信号送信部14は、高度に応じて応答信号8の送信パワーを、認識側装置3の受信用カメラ18が受信可能な最低限度に制御する。これにより応答信号送信部14の低消費電力運用が可能となる。なお、その他の動作は実施例1と同様である。
【0021】
実施の形態4.
本実施例に係わる味方認識システムは、実施例1、実施例2及び実施例3において応答信号送信部14が送信する応答信号8として1.5μm帯の波長の光を用い、受信用カメラ18として1.5μm帯を透過する狭帯域なフィルタ17を備え、この帯域に感度を有する撮影素子を用いたものである。
【0022】
1.5μm帯の波長の光は、通信用の半導体レーザで発生することができ、この帯域に感度を有する撮影素子は、InGaAsの撮影素子を用いることができる。1.5μm帯は、広く用いられている可視や0.8μmから0.9μmの近赤外帯域の波長を撮影するSiの撮影素子を用いたカメラでは撮影することができない。また、軍事用途で用いられる3μmから5μmの帯域あるいは8μmから12μmを撮影する赤外線カメラでも撮影することができない。このため、傍受されにくく秘匿性に優れた応答信号8の送受信が可能となる。
【0023】
また、1.5μm帯の波長の光は、可視や0.8μmから0.9μmの近赤外帯域の光に比べ、太陽光に含まれる量が1/10程度になるため受信用カメラ18は、太陽光の地上での反射光の影響が軽減され、受信信号の信号対雑音比を高くできる効果がある。
【符号の説明】
【0024】
1 機体、2 偵察用カメラ、3 認識側装置、4 撮影範囲、5 質問信号、6 目標、7 味方地上側装置、8 応答信号、9 質問信号送信部、10 質問範囲整合部、11 受信範囲整合部、12 質問信号受信部、13 制御部、14 応答信号送信部、15 応答範囲整合部、16 視野整合部、17 フィルタ、18 受信用カメラ、19 画像整合部、20 画像重畳部、21 撮影画像、22 画像重畳部から送出される画像、23 高度情報、24 高度推測部。
【技術分野】
【0001】
本発明は、上空から撮影した画面に存在する地上目標の中から味方を認識する味方認識システムに関するものである。
【背景技術】
【0002】
目標を照準する照準側の照準スコープの視野内に存在する全ての目標を同時に僚友認識するための僚友認識方法として、照準側が照準側装置を具備し、僚友が被照準側装置を具備する構成のものがある。ここで僚友とは味方のことを意味し、僚友認識とは対称の中から味方を識別して味方を認識することをいう。以下では僚友のことを味方とも言い、僚友認識のことを味方認識とも言う。
この装置において、照準側装置の質問用送信部が、照準スコープの視野の全域に質問信号を送信すると、その視野内にいる僚友が装着する被照準側装置から特定の光信号である応答信号が返信される。照準側装置において、受信用カメラは、応答信号と同じ波長の光のみを透過させるフィルタを有し、フィルタを透過した光により生成される画像を撮影する。画像重畳部は、照準スコープの入射部により入射された光により生成される画像に、受信用カメラにより撮影された画像を重畳する。照準スコープの照準部は、その画像を表示する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−157479号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術による僚友認識装置では、僚友(味方)は質問信号がどの方向から到来するかわからないため、被照準側装置からの応答信号は全周囲に送信する必要があった。このため、応答信号に大きなパワーが必要となり被照準側装置が大型化及び大消費電力化する課題があった。また、全周囲に応答信号を送信するため他者に傍受される可能性が高くなり秘匿性の確保に課題があった。
【課題を解決するための手段】
【0005】
この発明に係る味方認識システムは、飛しょう体に搭載され、前記飛しょう体の真下方向に向けて、所定の視野角で地上の領域を撮像する偵察用撮像装置と、前記視野角と同程度の角度の放射角を有し前記飛しょう体の真下方向に向けて質問信号を送信する質問信号送信部と、前記視野角と同程度の視野角を有し前記飛しょう体の真下方向に撮像方向を向けて、前記質問信号を受信した味方移動体が応答する発光信号を受光してその輝点を撮像する受信用撮像部と、前記輝点に基き味方移動体の位置を検出し、前記偵察用撮像装置が撮像した画像上に前記味方の位置を表わす輝点を重畳する画像重畳部とからなる認識側装置と、を備える飛しょう体搭載装置と、地上を移動する味方の味方移動体に搭載され、前記放射角と同程度の角度の受信角を有し受信する方向を前記味方移動体の真上方向に向けて前記質問信号を受信する受信部と、前記質問信号が味方移動体からのものであるかを判定する制御部と、前記質問信号が味方移動体からのものであると判断した場合に、応答信号として、前記視野角と同程度の角度の放射角で前記味方移動体の真上方向に向けて前記発光信号を送信する応答信号送信部と、を備える味方地上側装置と、からなる。
【発明の効果】
【0006】
本発明によれば、地上にある味方地上側装置が応答信号を送信する領域を制限することができるため、応答信号のパワーを低減でき、味方地上側装置を小型低消費電力化できる効果がある。
また、応答信号の送信する領域を前記のように制限するため他者に傍受される可能性が低減し秘匿性に優れる効果がある。
【図面の簡単な説明】
【0007】
【図1】実施例1に係わる味方認識システムの概要を示す概念図である。
【図2】実施例1に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【図3】実施例2に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【図4】実施例3に係わる認識側装置及び味方地上側装置の構成を示すブロック図である。
【発明を実施するための形態】
【0008】
実施の形態1.
以下、本発明の実施の形態について、図を用いて説明する。
【0009】
図1は、本実施例に係わる味方認識システムの概要を示す概念図である。味方認識システムは、機体1に搭載された偵察用カメラ2及び認識側装置3からなる機体搭載装置と、地上の移動体に搭載された味方地上側装置7とから構成される。機体1の例として、例えば飛しょう体が挙げられる。
【0010】
図1において、機体(飛しょう体)1は、偵察用カメラ2及び認識側装置3を搭載している。偵察用カメラ2は所定の視野角θをもって機体1の真下方向を撮影し、複数の目標6a〜dを含む領域である撮影範囲4を撮影している。認識側装置3は、複数の目標6a〜dに質問信号5a〜dを送信する。目標6a及び目標6dは、味方であるため味方地上側装置7a及び味方地上側装置7bを搭載しているため、それぞれ応答信号8a及び応答信号8bを返信する。目標6b及び目標6cは、味方でないため味方地上側装置を搭載しておらず応答信号を返信しない。認識側装置3は、応答信号8a及び応答信号8bを受信することで目標6a及び目標6dが味方であることを認識する。
【0011】
図2は、認識側装置3及び味方地上側装置7の構成を示すブロック図である。
【0012】
認識側装置3は、質問信号送信部9、質問範囲整合部10、視野整合部16、フィルタ17を具備した受信用カメラ18、画像整合部19及び画像重畳部20から構成される。また、味方地上側装置7は、受信範囲整合部11、質問信号受信部12、制御部13、応答信号送信部14及び応答範囲整合部15から構成される。
【0013】
認識側装置3の質問信号送信部9は、質問信号5が電波の場合は送信アンテナと送信機から構成され、また質問信号5が光の場合は送信光学系と送信機から構成され、質問信号5を送信する。質問範囲整合部10は、質問信号5の送信範囲を偵察用カメラ2の撮影範囲4とほぼ整合させ、機体1の真下方向に質問信号5を送出する。すなわち質問範囲整合部10は、偵察用カメラ2の視野角θとほぼ同じ放射角φ(φ≒θ)で、機体1の真下方向に、質問信号5を送出する。
これにより質問信号5は、偵察用カメラ2の撮影範囲4に存在する全ての目標に送信することが可能となる。なお、質問範囲整合部10は、質問信号5が電波の場合は、質問信号送信部9の送信アンテナの指向性を調整する手段であり、質問信号5が光の場合は、質問信号送信部9の送信光学系の倍率を調整する手段である。
【0014】
質問信号5を受け取る味方地上側装置7の受信範囲整合部11は、上方向から到来する質問信号5を受け取るが、その受け取り範囲は味方地上側装置7の真上向きに質問信号5の送信範囲と整合させている。すなわち受信範囲整合部11は、質問範囲整合部10が整合させる質問信号5の放射角φと同じ角度となる受け取り角φで、上方向から到来する質問信号5を受け取るように整合調整する。
これにより質問信号受信部12は、偵察用カメラ2の撮影範囲4のどこに存在しても質問信号5を受信することが可能になるとともに、余計な範囲からの雑音を受け取ることを防ぐことが可能となる。なお、受信範囲整合部11は、質問信号5が電波の場合は、受信アンテナの指向性を調整する手段であり、質問信号5が光の場合は、受信光学系の視野を調整する手段である。質問信号受信部12は、質問信号5が電波の場合は受信アンテナと受信機から構成され、また質問信号5が光の場合は受信光学系と受信機から構成され、質問信号5を受信する。制御部13は、質問信号5を分析し、あらかじめ設定された信号と合致すると応答信号送信部14に応答信号8を送信させる。応答信号送信部14は、送信光学系と送信機から構成され、光信号の応答信号8を送信する。応答範囲整合部15は、応答信号8の送信範囲を偵察用カメラ2の撮影範囲4とほぼ整合させ、機体1が存在する真上方向に応答信号8を送出する。
すなわち、応答範囲整合部15は、偵察用カメラ2の視野角θとほぼ同じ放射角φ(φ≒θ)で、味方地上側装置7の真上方向に、応答信号8を送出する。
これにより、応答信号送信部14は、従来の技術による僚友認識装置のように全周囲に応答信号8を送信する必要がないため、送信出力を抑えることができ、装置の小型・低消費電力化が可能となる。なお、応答範囲整合部15は、応答信号送信部14の送信光学系の倍率を調整する手段である。
【0015】
応答信号8は、認識側装置3の視野整合部16を介して受信用カメラ18で受信される。受信用カメラ18はフィルタ17を応答信号8の受光口に備え、応答信号8の波長の光を選択受信する。このため、不要な太陽等の反射光を軽減でき、受信信号の信号対雑音比を高くできる。視野整合部16は、下方向から到来する応答信号8を受け取るが、その受け取り範囲は真下向きに応答信号8の送信範囲と整合させている。すなわち視野整合部16は、応答範囲整合部15が整合させる応答信号8の放射角φと同じ角度となる受け取り角φで、下方向から到来する応答信号8を受け取るように整合調整を行う。
これにより、受信用カメラ18は、偵察用カメラ2の撮影範囲4に存在する全ての味方からの応答信号8を受信することが可能となる。なお、視野整合部16は、受信用カメラ18の光学系の視野を調整する手段である。受信用カメラ18から出力される撮影画像では、応答信号8を送信している味方の存在する地点が輝点となって現れる。
【0016】
画像整合部19は、受信用カメラ18からの撮影画像のサイズを画像重畳部20において偵察用カメラ2からの撮影画像21と同一撮影地点が重なるよう調整する。画像重畳部20では、偵察用カメラ2からの撮影画像21中に存在する目標のうち、味方だけに受信用カメラ18からの撮影画像中の輝点が重畳される。あるいは、輝点の替わりに味方を表すシンボルを重畳してもよい。画像重畳部20から送出される画像22には、前記のように偵察用カメラ2の撮影画像21中の味方に輝点あるいは味方を表すシンボルが付与されているため、この画像22の観察者は複数の目標の中から一目で味方を認識することが可能となる。
【0017】
実施の形態2.
図3は、本実施例に係わる認識側装置3及び味方地上側装置7の構成を示すブロック図である。なお、味方地上側装置7の構成は図2と同様である。
【0018】
図3は、図2の認識側装置3の構成と機体1の高度情報23が質問信号送信部9に入力されることが異なる。質問信号送信部9は、高度情報に応じて質問信号5の送信パワーを、味方地上側装置7の質問信号受信部12が受信可能な最低限度に制御する。これにより質問信号送信部9の低消費電力運用が可能となる。また、質問信号送信部9は高度情報23を質問信号5に含めて送信する。味方地上側装置7の応答信号送信部14は、高度情報に応じて応答信号8の送信パワーを、認識側装置3の受信用カメラ18が受信可能な最低限度に制御する。これにより応答信号送信部14の低消費電力運用が可能となる。なお、その他の動作は実施例1と同様である。
【0019】
実施の形態3.
図4は、本実施例に係わる認識側装置3及び味方地上側装置7の構成を示すブロック図である。なお、認識側装置3の構成は図2と同様である。
【0020】
図4は、図2の味方地上側装置7の構成に、高度推測部24を付加したものである。本実施例では、認識側装置3の質問信号送信部9は、常に一定パワーで質問信号5を送信する。味方地上側装置7の高度推測部24は、質問信号受信部12で受信した質問信号5のパワーを測定し、あらかじめ記憶されている質問信号送信部9の送信パワーからの減衰量を求め、この減衰量から機体1の高度を推測する。減衰量から高度の推測は、あらかじめ質問信号5の伝搬距離と減衰量の関係を実測あるいは理論計算により求めておけばよく、測定した減衰量に相当する伝搬距離がここでは機体の高度に相当する。応答信号送信部14は、高度に応じて応答信号8の送信パワーを、認識側装置3の受信用カメラ18が受信可能な最低限度に制御する。これにより応答信号送信部14の低消費電力運用が可能となる。なお、その他の動作は実施例1と同様である。
【0021】
実施の形態4.
本実施例に係わる味方認識システムは、実施例1、実施例2及び実施例3において応答信号送信部14が送信する応答信号8として1.5μm帯の波長の光を用い、受信用カメラ18として1.5μm帯を透過する狭帯域なフィルタ17を備え、この帯域に感度を有する撮影素子を用いたものである。
【0022】
1.5μm帯の波長の光は、通信用の半導体レーザで発生することができ、この帯域に感度を有する撮影素子は、InGaAsの撮影素子を用いることができる。1.5μm帯は、広く用いられている可視や0.8μmから0.9μmの近赤外帯域の波長を撮影するSiの撮影素子を用いたカメラでは撮影することができない。また、軍事用途で用いられる3μmから5μmの帯域あるいは8μmから12μmを撮影する赤外線カメラでも撮影することができない。このため、傍受されにくく秘匿性に優れた応答信号8の送受信が可能となる。
【0023】
また、1.5μm帯の波長の光は、可視や0.8μmから0.9μmの近赤外帯域の光に比べ、太陽光に含まれる量が1/10程度になるため受信用カメラ18は、太陽光の地上での反射光の影響が軽減され、受信信号の信号対雑音比を高くできる効果がある。
【符号の説明】
【0024】
1 機体、2 偵察用カメラ、3 認識側装置、4 撮影範囲、5 質問信号、6 目標、7 味方地上側装置、8 応答信号、9 質問信号送信部、10 質問範囲整合部、11 受信範囲整合部、12 質問信号受信部、13 制御部、14 応答信号送信部、15 応答範囲整合部、16 視野整合部、17 フィルタ、18 受信用カメラ、19 画像整合部、20 画像重畳部、21 撮影画像、22 画像重畳部から送出される画像、23 高度情報、24 高度推測部。
【特許請求の範囲】
【請求項1】
飛しょう体に搭載され、
前記飛しょう体の真下方向に向けて、所定の視野角で地上の領域を撮像する偵察用撮像装置と、
前記視野角と同程度の角度の放射角を有し前記飛しょう体の真下方向に向けて質問信号を送信する質問信号送信部と、前記視野角と同程度の視野角を有し前記飛しょう体の真下方向に撮像方向を向けて、前記質問信号を受信した味方移動体が応答する発光信号を受光してその輝点を撮像する受信用撮像部と、前記輝点に基き味方移動体の位置を検出し、前記偵察用撮像装置が撮像した画像上に前記味方の位置を表わす輝点を重畳する画像重畳部とからなる認識側装置と、を備える飛しょう体搭載装置と、
地上を移動する味方の味方移動体に搭載され、
前記放射角と同程度の角度の受信角を有し受信する方向を前記味方移動体の真上方向に向けて前記質問信号を受信する受信部と、前記質問信号が味方移動体からのものであるかを判定する制御部と、前記質問信号が味方移動体からのものであると判断した場合に、応答信号として、前記視野角と同程度の角度の放射角で前記味方移動体の真上方向に向けて前記発光信号を送信する応答信号送信部と、を備える味方地上側装置と、
からなることを特徴とする味方認識システム。
【請求項2】
前記応答信号送信部は、特定の波長帯の光を応答信号として送信し、前記受信用撮像部は前記特定の波長帯の光のみを受光することを特徴とする請求項1記載の味方認識システム。
【請求項3】
前記特定の波長帯の光として、1.5μm帯の光を用いたことを特徴とする請求項2記載の味方認識システム。
【請求項4】
前記質問信号送信部は、前記飛しょう体の高度に基づき、前記味方地上側装置が受信可能な程度に前記質問信号を送信する送信パワーを制御することを特徴とする請求項1、2いずれか記載の味方認識システム。
【請求項5】
前記質問信号送信部は一定の送信パワーで前記質問信号を送信し、
前記味方地上側装置は、前記質問信号の受信パワーに基づき前記飛しょう体の高度を推定し、前記応答信号送信部は前記受信用撮像部が前記発光信号を受信可能な程度に前記発光信号を送信する送信パワーを制御することを特徴とする請求項1、2いずれか記載の味方認識システム。
【請求項1】
飛しょう体に搭載され、
前記飛しょう体の真下方向に向けて、所定の視野角で地上の領域を撮像する偵察用撮像装置と、
前記視野角と同程度の角度の放射角を有し前記飛しょう体の真下方向に向けて質問信号を送信する質問信号送信部と、前記視野角と同程度の視野角を有し前記飛しょう体の真下方向に撮像方向を向けて、前記質問信号を受信した味方移動体が応答する発光信号を受光してその輝点を撮像する受信用撮像部と、前記輝点に基き味方移動体の位置を検出し、前記偵察用撮像装置が撮像した画像上に前記味方の位置を表わす輝点を重畳する画像重畳部とからなる認識側装置と、を備える飛しょう体搭載装置と、
地上を移動する味方の味方移動体に搭載され、
前記放射角と同程度の角度の受信角を有し受信する方向を前記味方移動体の真上方向に向けて前記質問信号を受信する受信部と、前記質問信号が味方移動体からのものであるかを判定する制御部と、前記質問信号が味方移動体からのものであると判断した場合に、応答信号として、前記視野角と同程度の角度の放射角で前記味方移動体の真上方向に向けて前記発光信号を送信する応答信号送信部と、を備える味方地上側装置と、
からなることを特徴とする味方認識システム。
【請求項2】
前記応答信号送信部は、特定の波長帯の光を応答信号として送信し、前記受信用撮像部は前記特定の波長帯の光のみを受光することを特徴とする請求項1記載の味方認識システム。
【請求項3】
前記特定の波長帯の光として、1.5μm帯の光を用いたことを特徴とする請求項2記載の味方認識システム。
【請求項4】
前記質問信号送信部は、前記飛しょう体の高度に基づき、前記味方地上側装置が受信可能な程度に前記質問信号を送信する送信パワーを制御することを特徴とする請求項1、2いずれか記載の味方認識システム。
【請求項5】
前記質問信号送信部は一定の送信パワーで前記質問信号を送信し、
前記味方地上側装置は、前記質問信号の受信パワーに基づき前記飛しょう体の高度を推定し、前記応答信号送信部は前記受信用撮像部が前記発光信号を受信可能な程度に前記発光信号を送信する送信パワーを制御することを特徴とする請求項1、2いずれか記載の味方認識システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−179744(P2011−179744A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−44054(P2010−44054)
【出願日】平成22年3月1日(2010.3.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月1日(2010.3.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]