
呼吸ガスを投与するための装置、及び少なくともいくつかの相において交替する呼吸ガス圧力を調整するための方法
本発明は、ユーザに呼吸ガスを供給するための方法及び装置に関する。患者に主観的に知覚可能であるか、少なくともより高い受入を許可するように圧力誘導をもたらし、所望の治療の効果に適切なことの態様と同様に呼吸の運動に関する態様を説明する解決策を提供することが本発明の目的である。この目的は、呼吸ガス供給用の供給装置と、定値の呼吸ガス圧力信号によって、定値の呼吸ガス圧力レベルで呼吸ガスを供給するように供給装置をトリガーするための圧力調整装置と、定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを少なくとも示すパラメータを提供するためのパラメータ決定手段と、を有して、圧力指定装置はコンピュータ回路を含み、呼吸ガス流量及び経過時間を示すパラメータを考慮に入れ、結果として、呼吸ガス流量の範囲ととともに呼吸ガス圧力を低下させることへの傾向が増加する経過時間で減少する動的又は非線形の圧力誘導関数に基づいて計算される、呼吸ガス圧力の圧力レベルへの調整が少なくとも呼気相において達成されるような方法で、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するように、コンピュータ回路が構成される、少なくともいくつかの相で周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを供給するための装置を設けることによる本発明の第一の態様に従って達成される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ユーザへの呼吸ガスを投与する(administer)ための装置に関する。さらに、本発明は、少なくともいくつかの相において周囲圧力を越える交替圧力レベルに呼吸ガスの、ユーザの側で優勢である(prevail)、静圧を調整するための方法に関する。
【背景技術】
【0002】
特に、睡眠に関連する呼吸障害の治療のために、呼吸マスク配置及びそれに連結された供給装置によって、周囲圧力を越える昇圧された圧力レベルで患者に対して、ろ過された周囲空気のような呼吸ガスを提供することが知られている。
【0003】
周囲圧力を越えて昇圧された呼吸ガス圧力(典型的には4乃至18mbarの範囲である)によって、上部気道の領域でのいかなる障害も防ぐことが可能になる。かかる障害が高い圧力レベルで呼吸ガスの投与の間に上部気道の領域で発生する可能性を低減することは、空気の固定(splinting)として知られている効果に基づいている。この固定(splinting)効果は、上部気道の領域の気道壁に作用するとともに、プロセスでこの壁を放射状に支持する圧力の結果として得られる。気道の障害に関連する部分を支持するのに必要な圧力レベルは、ユーザの生理学的ステータスに依存する。特に、上部気道の明白な狭窄がある臨床像(clinical picture)において、これらの狭窄のために吸気における流れによってもたらされた減圧は、外部の呼吸ガス圧力が必要であることを意味する。それによって、障害に関連したゾーンでの流れ抵抗によってもたらされた吸気の減圧が差し引かれたあとでさえ、適切な気道支持が保証される。呼気相の間に、気道の流れ抵抗により、支援する圧力の低下がもたらされないので、その結果、呼気では、トラッキング効果は低圧力でさえ概してまだ保証されている。
【0004】
ユーザへのできるだけ小さな圧力負荷を保持するために、呼気相又は吸気相がちょうど今起こっているかどうかを解明することは、例えば呼吸ガス流量を測定することによって知られている。患者側に優先している(prevail)呼吸ガス圧力は、吸気相では呼吸ガス圧力が呼気相よりも高いように、検出された呼吸相に応じて本質的に同期して変更することができる。ピーク圧力レベル及び圧力レベル間隔(spacing)は、睡眠実験室のユーザの検査の間に典型的に適合される。
【0005】
規定された方法で呼吸ガスの圧力を変化させることは可能である。特に、吸気相の間よりも呼気相の間において、より低い呼吸ガス圧力が有効であるように呼吸ガス圧力がガイドされる。また、治療装置の所定の開始相、又はユーザが寝入る相が完了するまで、あるいは、呼吸支持を提供される人が所定の睡眠ステージにいるならば、高い呼吸ガス圧力又は高いレベル差が例えば調整されないように呼吸ガス圧力を適応させることは可能である。
【0006】
周囲圧力を少なくとも断続的に越える圧力レベルでの呼吸ガスの投与(administration)は、送風機によって典型的に形成された、呼吸ガスを供給するための供給装置である装置によって行われる。その装置は制御ユニットを含んでいる。制御ユニットによって、供給装置の供給パワーが適合される。例えば送風機の羽根車の毎分回転数(rpm)調整によって行われる。
【0007】
この制御ユニットは、所望の圧力を調整する特徴が、制御ユニットの構成の本質的にプログラムベースの規定によって達成されるように具体化することができる。計算パワーの点から十分に装備された制御ユニットにおいて、比較的複雑な圧力調整方法を実行することが可能になり、また呼吸ガス流量信号を観察することによりユーザの瞬間の生理的なステータスに関する結論を引き出すことが可能になり、及び/又は、呼吸相を検出するとともに吸気相のためと呼気相のための異なった設定ポイント圧力レベルを計算することが可能になる。
【0008】
呼吸ガス圧力を解明する際に、問題は、呼吸の動態(dynamics)の見地から又は治療の見地から又は妨害を防止するために有利な圧力レベルを設定することが、最適でないように、又は厄介であるか不愉快でさえあるように、影響を受けたユーザによって時々主観的に知覚されるということである。
【発明の開示】
【0009】
この問題を考慮すると、本発明の目的は、心地が良いか少なくとも許容可能なものとしてユーザによって主観的に知覚されるように圧力をガイドすることを可能にするとともに、意図した治療効果の点から決定的である(definitive)呼吸の動態(dynamics)を考慮する解決策を提供することである。
【0010】
本発明の第一の態様では、この目的は、少なくともいくつかの相で周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを供給するか又は提供する以下の装置によって得られる。
すなわち、当該装置は、
呼吸ガスを供給するための供給装置と、
供給装置が、定値の呼吸ガス圧力信号により、定値の呼吸ガス圧力レベルで呼吸ガスを供給するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である(definitive)定値の呼吸ガス圧力信号を生成するための圧力指定(specification)装置と、
少なくとも瞬間の呼吸ガス圧力pと、経過時間tと、瞬間の呼吸ガス流量vとを表示するパラメータを供給するためのパラメータ収集手段と、を有し、
圧力指定装置はコンピュータ回路を含み、少なくとも呼気相において、動的又は非線形の圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮に入れ、その結果、経過時間の増加で呼吸ガス流量の範囲ととともに呼吸ガス圧力を低下させる傾向が減少する、圧力レベルへの呼吸ガス圧力の調整が達成されるように、当該コンピュータ回路は、パラメータ決定手段によって提供されたパラメータの関数として定値の呼吸ガス圧力レベルを調整するように構成される。
【0011】
この非線形の関数は、好ましくは、三角関数、又は明白な非線形の特徴を持ったものに近い関数である。特に、非線形の関数は、正接関数、正弦関数/余弦関数又はルート関数として具体化することができる。調整の引数(argument)として、特に、基準値に対する瞬間の呼吸ガス流量の比率は用いられる。この基準値は、前呼吸の呼吸ガス流量の極端な値、又は好ましくは適応した他のある方法で計算された値である。適応して計算された値として、直近の呼吸の、呼吸の設定回数の、又は所定時間内の呼吸の、平均呼吸ガス流量は、特に適切である。
【0012】
典型的な呼気相と同じ長さで続く時間の長さの呼気の後、減圧の可能性が少なくなり、任意でゼロにセットされるように、関数が好ましくは規定される。
【0013】
また、基礎的な治療圧力を越える一時的圧力増加をもたらすために規定された時間の長さ又は適応性のある記載(statement)によって計算された時間の長さが経過した後、その結果、例えば、未検出の呼気相の場合には、吸気相を開始するためのトリガー効果が生成されることが、本発明の記載(statement)として、可能である。特にある時間基準が満たされる場合、正弦特徴に依存して、実際の基礎的な治療圧力を過ぎた穏やかなオーバースイングが達成される。
【0014】
本発明の記載(statement)によって、呼吸をより簡単にするように主観的に知覚可能な方法で呼吸ガス圧力の段階的な低下をもたらすことが、吸気相のフェージングに従って、好ましくは可能になる。時間の増加で、呼気相のための減圧ポテンシャル(potential)が減少するように、減圧の範囲は時間とともに変化する。最初の呼気減圧、及びユーザに顕著に知覚可能な閾値なしで最終の呼気減圧のポテンシャル(potential)の両方を制限することが更に可能になる。そして、呼気相の終端が不正確に検出されるならば、又は執拗な漏出があるならば、治療圧力レベルへの信頼のある戻りを保証することが可能である。
【0015】
本発明の特別の態様において、呼吸ガス流量を示す信号を考慮に入れた動的又は非線形は、電装品の瞬間又はモデル化された熱負荷、又は限界温度を設定した他のタイプのコンポーネントは考慮される。このアプローチによって、装置状態を完全に利用することは特に可能になる。装置のコンポーネントは、必要ならば、非常に動的な調整を実行するためには許されないほどの高い熱負荷を有していない。温度測定値又は装置の熱負荷に関する他の種類の結論に基づいてそれほど動的でない調整が必要であるだけか、多くの制限された圧力調整範囲が推奨されたように見えるならば、より小さな圧力変化の可能性(potential)が有効であるか、他の種類の小さな圧力変化が起こるように、パラメータ適応によって、圧力調整関数(function)の対応する引数(argument)が、設計される。
【0016】
呼吸ガス供給装置の臨界のコンポーネントの見積られた熱負荷又は実際の熱負荷を考慮することによって、制御範囲を完全に利用することが時々可能になり、実際の装置負荷又は見積られた装置負荷がそれに必要と思わせるまで、この範囲を抑制(constrict)させないことが可能になる。その結果、広い制御範囲で必要ならば非常に動的な調整で動作することが、装置(それはまだ冷たい)の最初の作動相において特に可能になる。
【0017】
好ましくは、定値の圧力レベルの計算を意図した関数は、少なくとも一つの非線形の要素(member)を持った総和(summation)関数として、又は呼吸ガス流量を考慮に入れる引数(argument)を持った非線形の関数として設計されている。特に、両方とも平均呼吸ガス流量値を下回る呼吸ガス流量と、平均呼吸ガス流量値を上回る呼吸ガス流量とに対して、弱まった減圧ポテンシャルが生じる(result)ように関数が設計される。平均の呼気相には典型的である期間の終端に向けて、減圧ポテンシャルは、広範囲に制限されるか、ゼロにセットされるか、任意に逆さまにされ、その結果、圧力の僅かな過上昇(overelevation)は例えば吸気トリガーとして保証する。
【0018】
呼吸ガス流量と呼吸ガス圧力との関係のプロッティング(plotting)を用いることが圧力変化において可能である。この関係に基づいて、妨害状態がちょうど今存在するかどうかに関する結論が出される。妨害状態の評価から、呼吸ガス圧力レベル、変化帯域幅及び他の技術的な調整特徴を考慮することは可能になる。また、ユーザの瞬間の生理学的状態と、特に、その瞬間の妨害の度合いとに関する結論を出すことは、他のある方法で、又は前述の準備(provision)と組み合わせて可能である。それぞれのアプローチ、特に妨害に典型的であるか、又は、他の方法でモータ呼吸に関する結論を提示する呼吸流れプロファイルの特性を評価するための記載(statement)は、適切であり、特にそのとき有効である呼吸ガス圧力と組み合わせられる。
【0019】
また、存在するあらゆる漏出状態が検出されるか、好ましくは調整によって補われる項(term)又は引数(argument)を持った本発明の関数(function)を提供するかリンクすることも可能である。特に、著しく増加した漏出流量があるならば、圧力変化範囲の幅を抑制させることは可能である。また、ある圧力レベルに呼吸ガス圧力を大部分は一定にガイドすることは可能である。漏出状態のために設計された圧力決定記載(statement)の指定(specification)で確認され、そしてそれはユーザを意図した例えば最小のCPAP圧力に対応する。
【0020】
用語「呼吸ガス流量」は、呼吸によって指示された単位時間当たりのシフトされた体積を意味すると、現在の文脈において理解されるべきである。これに関する情報は、差圧測定バッフル(baffle)、動態的圧力測定配置、又はガスの容積流量を検出するのに適している他の種類の測定配置のような適切な測定手段によって得ることができる。制御の見地から、呼吸ガス供給装置によって引き出された(drawn)パワーのような、呼吸ガス流量を示す他の種類の情報又は信号は、評価される。呼吸ガス流量、又はそれを表す信号は、他の方法で得ることができる。特に、特性ダイアグラムで又は地図に基づいて(map-based)、送風機の毎分回転数(rpm)から、及び送風機で実施されている(prevail)圧力勾配から得ることができる。
【0021】
一定のほとばしり(flushing)、すなわち、流出開口を通じてマスクの領域からCO2を積むかもしれない空気の連続的な排出路(diversion)を備えたシステムで、結果として流量信号に永久に含まれて、圧力変化に応じてわずかに変動する値は適切に考慮され、その結果、ほとばしる流れは、呼吸又は吸気として解釈されない。ほとばしる流れの確認は、積分又は平均(mean)値の形成により、適切なモデルを用いるコンピュータによって行われて、ゼロ線に対してオフセットの形で呼吸ガス流量信号に示される。
【0022】
呼吸相の検出は、呼吸ガス流量信号の評価により、特に、ゼロ点又は閾値値の達成に関して、その第一の微分(derivation)を評価することにより、行われる。呼吸相検出のための異なった記載(statement)(体積に基づいた、曲率に基づいた、またランプ(ramp)に基づいた記載、並びに、他の種類のプロファイルに基づいた記載)は、呼吸相の中で最も信頼できる可能な検出及び識別(discrimination)を可能にするために組み合わせることができる。
【0023】
呼吸ガス流量の変化の範囲は、適切な参照パラメータを用いた割合(proportion)にセットすることができる。その結果、呼吸ガス流量の変化は、0乃至1、又は0乃至πのような標準化された範囲内にある。このように達成された標準化は、さらに三角関数によってマッピング又はプロットされ、あるいは瞬間の適切な圧力値を計算するために用いられる。呼吸ガス圧力における変化として容積流量における変化をマップピングするためにこの点で用いられるマッピング関数は、呼気のための典型的な期間内において、容積流量の中間値の範囲で、反対に容積流量の増加とともに変化が減少している間に、比較的主たる圧力変化が発生するように好ましくは設計されている。(このように、マッピング関数は、初め部分又は終端部分より中間部分においてより急勾配である(steep)。)正弦又は余弦の記載(statement)によって、特に有利なマッピング概念は、減圧値として呼気の容積流量をマッピングするために実行される。呼気相の間、圧力は、例えば次の記載(statement)で規定される。
pexp(v,t)=1/2*pbase(1+cos(π*v/vmax*(k2Tinsp-t)/(k2*Tinsp)))
式において、
pexp(v,t)は呼気の静止の呼吸ガス圧力を表す。
pbaseは、推奨された静止の吸気の治療圧力のような基礎的圧力を表す。
vは呼吸ガス流量を表す。
vmaxは、最大呼吸ガス流量を表わし、任意に平均ピーク値を表す。
k2は適応ファクタである。
Tinspは吸気相の期間であり、任意に前の呼吸サイクルの平均値である。
【0024】
さらに有利な特徴、及び特に制御ユニットの構成特徴は、従属クレームの主題である。
【0025】
本発明は、一般に特別な特徴と同様に、他の方法で引用された効果の引用された特別の装置準備又は指示に起因するもののような、圧力誘導方法(それは本発明の装置に基づいて行なわれる)に関する。
【0026】
本発明のさらなる細部及び特徴は、図面とともに以下の説明から明白になるであろう。
【発明を実施するための最良の形態】
【0027】
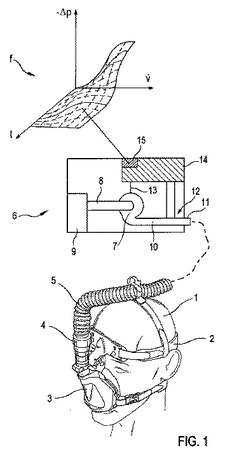
図1の模式図は、ユーザ1を示す。そのユーザに対して呼吸マスク3がヘッドバンド配置2によって固定される。この例における呼吸マスク3は、それが鼻領域をカバーするが、口領域を自由にするように具体化される。また、呼吸マスク3が口の開口をカバーするように呼吸マスク3を具体化することは可能である。呼吸ガスの供給は、口挿入要素、あるいは鼻孔のまわりの領域に据え付けられた単なる鼻パッドのような、他の種類の構造によって行うことができる。
【0028】
呼吸マスク3は、ホース継手プラグ4及び可撓性のホース5を介して呼吸ガス(この場合濾過された周囲空気)を提供するための装置6に接続される。装置6は、送風機7として本願で具体化された供給装置を含んでいる。供給装置は、吸込ライン8及び吸込フィルタ装置9を介して吸気側で環境と連通する。
【0029】
送風機7は圧力側で圧力ライン・セグメント10に接続される。圧力ライン・セグメント10は、マフラーセグメント(詳細に図示されていない)を介して、ホース継手スタブ11に導く。それに対して、可撓性のホース5が着脱可能に連結される。
【0030】
圧力ライン・セグメント10の領域では、呼吸ガス流量を示す信号をピックアップするための信号ピックアップ装置12がある。本願に示された典型的な実施態様では、信号ピックアップ装置は、測定バッフル配置と共同で具体化される、呼吸ガス流量を示す信号は、差圧の、すなわち、測定バッフル配置の上流及び下流での圧力の差の、信号の形でピックアップされる。呼吸ガス流量を示す信号は、他の方法で、例えば、描かれた(drawn)モーターパワーを検出する方式で、聴覚の効果に基づいて、例えば、通り過ぎる呼吸ガスの流れを示す方法でそらされる光学導波管によって、得られる。
【0031】
吸込ライン8と圧力ライン・セグメント10との間の送風機7によって構築された差圧が、送風機7に設けられた羽根車の毎分回転数(rpm)の調整により調整可能であるように、送風機7が具体化される。また、吸込ライン8と圧力ライン・セグメント10との間に存在する差圧を制御又は調整するための他の準備(provision)をなすことは可能である。かかる準備は、特にバイパスライン又は送風機7の内部に作られた準備の形をとってもよい。
【0032】
本願に示された典型的な実施態様では、吸込ライン8と圧力ライン・セグメント10との間で有効である差圧は、送風機7の羽根車の毎分回転数(rpm)の調整によって適応される。その目的のために、送風機7の駆動装置は、トリガーライン13によって制御ユニット14に接続される。制御ユニット14は、この制御ユニット14によって実施された最終分析において存する圧力の調整概念が、適切なプログラムデータセットを格納することによりプログラムに基づいた方法で規定されるように、好ましくは具体化される。特に好ましくは、それによって、意図した特別の治療に適応された圧力調整概念が実行されるように、制御ユニット14が具体化される。これらの圧力調整概念は、適切な記憶素子15における制御ユニット14に直接に格納される。交換可能ユニットとして記憶素子15を具体化することも可能である。その結果、適用可能な制御概念は、制御ユニット14の中に、又はその制御ユニット上に対応する記憶素子又は回路ユニットを挿入するか又は結合することによって提供される。また、制御ユニット14にインターフェース装置を提供することは可能である。その結果、制御ユニット14の適切な構成は、構成システムに一時的接続としてもたらされる。
【0033】
本願に示された典型的な実施態様では、データセットは記憶素子15に格納される。また、それによって、呼吸マスク3を介してユーザ1に適用された呼吸ガス圧力の適応は、呼吸と同期して断続的な交互の圧力レベルを提供する圧力調整概念によって規定されるように、なされる。
【0034】
これらの圧力レベルは、非線形の圧力誘導関数によって、呼気相に対して及び任意に吸気相に対して特に設定される。この非線形の圧力誘導関数は、例えば、時間t及び瞬間の呼吸ガス流量vに依存する3次元関数fとして表わされる。本願に示されたこの関数fに従って、呼気相の間での経過時間及び瞬間の呼吸ガス流量の関数として、減圧及び任意には吸気相の始めの圧力の僅かな過上昇(overelevation)は、もたらされる。
【0035】
瞬間の呼吸ガス流量を示して信号ピックアップ装置12によってピックアップされた信号に加えて、それは、瞬間的に設定された呼吸ガス圧力と、装置6のあるコンポーネントの実際に実施された熱負荷(モデルの記載(statement)によって計算された)とを考慮するように、制御ユニット14は更に具体化される。
【0036】
特に、装置6の制限値熱負荷に到達するまで、呼吸ガス圧力調整は、比較的高い動的な調整で、又は比較的広い圧力変化範囲で行われるように、制御ユニット14が構成される。これによって、特に患者が眠りにつく相において、圧力調整スペクトルを完全に利用する間に特に快適な圧力調整を得ることが可能になる。
【0037】
制御ユニットは、第一に、標準構成の形で、予定される(possible)ユーザを意図した治療圧力(CPAP圧力のようなもの)の好ましくは大きな大振りの無い(overswing-free)調整をなすように具体化される。
【0038】
使用又は処理のある例のみに対して、より複雑な圧力制御概念を実施するための制御ユニット14が構成されている。この特別な構成は、設定点圧力信号のより複雑な計算を意図した制御モジュールで制御ユニット14が拡張されるように作られる。その結果、インターフェース情報として、制御モジュールによって必要とされる定値の(set-point)圧力だけが交換される。定値の圧力を解明する際に、特定装置の特性、特に送風機7の伝達挙動を考慮することが可能である。その結果、定値の圧力信号の指定(specification)によって、システムのある伝達特性が既に考慮される。この場合、定値の圧力信号は、最後に調整される圧力に対応しないが、必要な圧力を得るために前もって必要とされた制御変数に対応する。
【0039】
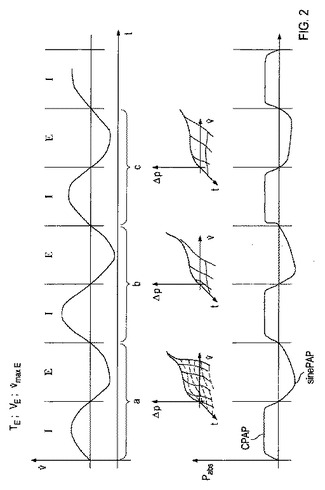
図2が示すように、特に記憶素子15に蓄えられたデータセットによる制御ユニット14の調整戦略(strategy)を規定することにより、制御ユニット14の本発明に係る構成に基づいて、少なくともいくつかの相において呼吸と同期して交替する呼吸ガス圧力レベルを設定することが可能になる。
【0040】
経過時間、瞬間の呼吸ガス流量、及び呼吸ガスを提供するために設けられた供給装置の熱負荷を特に表示する手順によって、心地が良いとしてユーザによって主観的に知覚可能な方法で呼気相の間に呼吸ガス圧力を減少することが可能になる。減圧は、呼気の呼吸ガス流量への減圧の関係が、本来的に著しく非線形であり、特に時間とともに変わるようになされる。その結果、特に平均呼気サイクルに典型的な時間相の終端方向に向かって、妨害を防ぐことを意図した治療圧力レベルへのリターンを得ることが可能になる。また、呼気相の終端に向かって、又は吸気相の初期段階において、意図した呼吸圧力レベル以上のある圧力の過上昇(overelevation)が得られるように、関数を設計することは可能である。
【0041】
第一の呼吸サイクルaにおいて、呼吸ガス流量に関して非線形である減圧は、本発明に係る関数に基づいて、呼気相の間得られる。呼吸サイクルbの間に、圧力誘導関数の適応のために、減圧と瞬間呼吸ガス流量との間で非比例で、著しく非線形である関係が生じる。
【0042】
例えば供給装置の既に進んだ熱負荷に基づいて、呼吸サイクルcに対して、結果は、1つの、呼気相の間での呼吸ガス流量と圧力低下とのさらに変化した非比例で非線形である関係が生じる。
【0043】
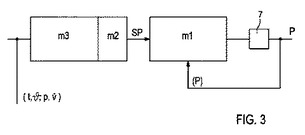
図3は、呼吸ガスの静水圧P(患者に適用される)を適応させるための本発明に係る閉じた制御ループを示す。この呼吸ガス圧力は送風機7によって構築される。送風機7の供給パワーは、制御モジュールm1によって適応される。この制御モジュールm1は、圧力信号Pのフィードバックの目的で、閉じた制御ループの一部を形成することができる。
【0044】
圧力指定(specification)信号SPは、パイロット制御モジュールm2によって圧力制御モジュールm1に届けられる。パイロット制御モジュールm2によって、圧力指定モジュールm3によって指定された定値は、制御モジュールm1を含む閉じた制御ループの伝達挙動の点から有利に処理される圧力制御信号SPにおいて生成されるようにパイロット制御モジュールm2が具体化される。個別のモジュールm1,m2,m3としてここに示された制御ユニットは、すべて、プログラムベースで、互いに噛み合った(intermeshed)形で、単一のコンピュータ装置において実現される。
【0045】
しかしながら、制御モジュールm1が、圧力指定信号SPを生成するための様々な可能性を許可する標準の又は基礎的な装置のコンポーネントであるように制御モジュールm1を形成することも可能である。例えば、呼吸ガス供給装置6(図1を参照)の基礎的又は標準の構成において、ユーザは圧力指定信号SPを単純な入力装置を用いて調整することができる。
【0046】
装置6を改造するか又は装着する場合には、制御ユニット14又は制御ユニット15の構成は、プログラムに基づいた方法で修正される。また、制御圧力信号SPを供給するために、追加の信号処理のハードウェア又はデータ処理のハードウェア又はデータ記憶媒体(medium)のハードウェアを備えた制御ユニット14を装備させることは可能である。
【0047】
圧力指定モジュールm3によって、特に、瞬間の呼吸ガス流量を示す信号が処理される。それは、例えば図1に示される信号ピックアップ装置12によって得られる。また、時間情報と同様に、モジュールm3によって、装置6の瞬間の熱負荷及びその瞬間に患者に印加された圧力pに関する情報が処理される。時間情報、そして任意に装置の熱状態に関する情報は、計時装置又はタイマ装置によってモジュールm3に直接に提供される。熱負荷も、装置6の領域に設けられた温度検出手段によって、又はモジュールm3の領域でのモデル記載(statement)によって検出される。装置6の熱負荷を検出するために、又は熱負荷を見積もるために、装置の領域でピックアップされる他の情報又は信号を評価することも可能である。特に、送風機モータの熱負荷の確認のために送風機によって取り込まれた(drawn)パワーに関する情報を解明するか、送風機モータをトリガーするために設けられたパワー・ステージを解明することは可能である。かかる情報は、圧力指定信号SP、圧力指定信号SPを得るために生成された中間結果、又はパワー・ステージをトリガーするための信号から得ることができる。
【0048】
送風機モータがそれと結合された羽根車を必要な呼吸ガス圧力が達成される速度で回転させるように制御モジュールm1が送風機モータをトリガーするように制御モジュールm1が具体化される。送風機の毎分回転数(rpm)の変化は、駆動モーターに提供されたパワーの規定された設定によって設定される。特に速い圧力変化を達成するために、制御モジュールm1によって、それによって、羽根車装置又はそうでなければ移動した集合体(mass)を一時的にブレーキをかけるブレーキモーメントが生成されるようにモータを操作することが任意に可能である。制御モジュールm1によってモータトリガー操作を実現することが可能である。モータトリガー操作で、少なくとも断続的で本質的に、パワーがモータに提供されない。また、送風機は特に呼吸ガス圧力の影響下で、プロセスにおいてそれ自体でブレーキをかける。この種の減圧は、モータ上の最小の可能な熱負荷の目的として有利であることを立証する。
【0049】
呼吸ガス圧力を変化させるための対応する概念は、供給装置又は連関したパワー・ステージ上の瞬間の熱負荷の関数として任意に選択される。例えば、高い熱負荷又は少なくとも見積られた高い熱負荷が有効である装置状態において、熱負荷での許されない大きなさらなる増加が期待されるべきでないように送風機の羽根車装置の圧力変更又は毎分回転数(rpm)変更をなすことは特に可能である。
【0050】
患者に加えられた呼吸ガス圧力の変化が、送風機羽根車の羽根車の毎分回転数(rpm)を変更すること以外のある方法でもたらされる場合には、制御モジュールm1によって、バイパス弁又は他の種類の制御ユニットのような対応する制御構造がトリガーされる。
【0051】
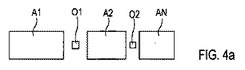
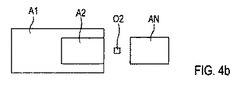
患者に加えられた圧力に決定的である結果を解明するための、圧力指定モジュールm3の領域での本発明にしたがって実行された非線形の関数は、演算子O1、O2によってともにリンクされた複数の引数(argument)A1,A2,・・・,ANを有するように具体化される。引数(argument)A1は、三角関数であり、特に、正弦関数、余弦関数又は正接関数である。その角度の増分(increment)は瞬間の呼吸ガス流量vを反映するパラメータを考慮している。引数(argument)A2によって、タイミング回路が実現される。それによって、引数(argument)A1の影響(effect)の所望の減衰は、増加する経過時間で、特に前の吸気相の終端以来ずっと進行している時間で可能になる。
【0052】
引数(argument)ANは、装置の瞬間的に有効である熱負荷、又は装置の見積もられた熱負荷を反映する役目をすることができる。演算子O1,O2は、特に乗算演算子(multiplication operator)として実現される。引数(argument)A1,A2,・・・AN及び連関した演算子(operator)O1,O2,・・・ONによって実現された全圧力誘導(guidance)関数は、任意に直列に分類され(broken down)、圧力指定モジュールm3の領域において適切な近似で実施される。
【0053】
図4bに提案されるように、引数(argument)A1が瞬間の呼吸ガス圧力と瞬間的に実施される呼気の呼吸ガス流量との間で所定の非線形の関係を反映するように引数(argument)A1を設計することも可能である。その目的のために、少なくとも一つのさらなる引数(argument)、特に引数(argument)A1の増分(increment)として時間の引数(argument)A2を提供することが可能である。引数(argument)ANは、特に乗算器(multiplier)としてのO2とともに、演算子O2を介して、引数(argument)A1に関数的にリンクされる。引数(argument)A1のさらに増分(increment)として、呼吸ガス圧力の指定(specify)を意図した関数に、引数(argument)ANを組み入れることも可能である。
【0054】
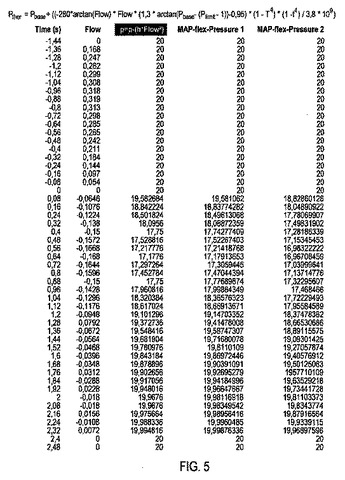
図5は、図4aに示された構成(makeup)の非線形の関数に基づいた、圧力曲線を示している。図4aにおいて、引数(argument)A1及びA2は、正接関数によって表わされ、演算子(operator)O1は、乗算器(multiplier)である。
【0055】
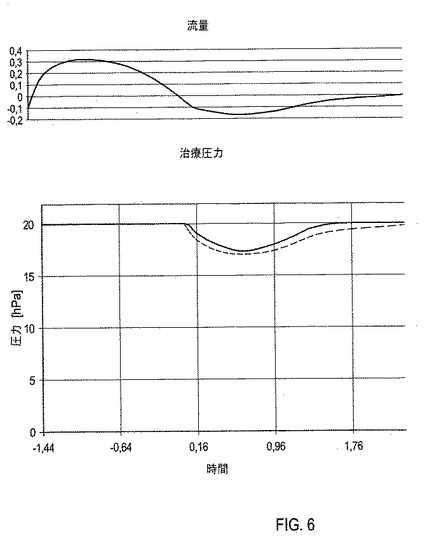
図6は、示された関数に基づいて計算された治療圧力を示す。吸気相の間、治療圧力は、所定値に、本願では例えば20 mbarに維持される。呼気相の間、治療圧力が減少する。その低下は、呼気相の間、有効である呼吸ガス流量と非線形に関連している。
【0056】
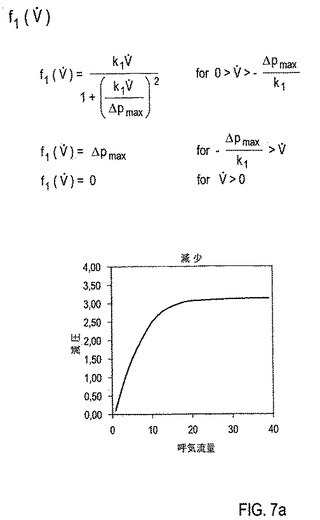
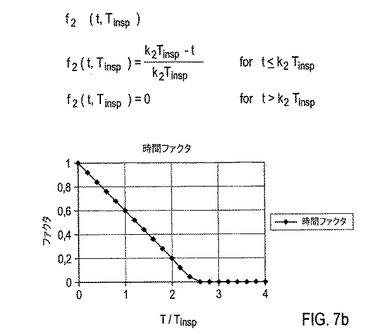
図7a、7b及び7cにおいて、呼気相の間、異なった圧力レベルに低下した治療圧力を解明するためのさらなる関数が示される。ここに示された関数は、図4aに図示されたスキームに対してその構成において一致する。引数(argument)f1は、非線形の引数(argument)である。引数(argument)f1は、瞬間の呼吸ガス流量を考慮するために用いられる。引数(argument)f2は、タイミング要素(member)を組込むために用いられる。引数(argument)f1によって、図7aに組み入れられた図面a)から分かるように、呼気の呼吸ガス流量と連関した減圧との間の関係が達成される。
【0057】
図7bに示された関数f2により、引数(argument)f1によって達成される減圧の減衰(attenuation)は、吸気相の終端からずっと経過している時間の関数として得られる。ここに示された関数では、このタイミング要素は、図7bに組み入れられた図面b)から分かる抑制効果を有する。
【0058】
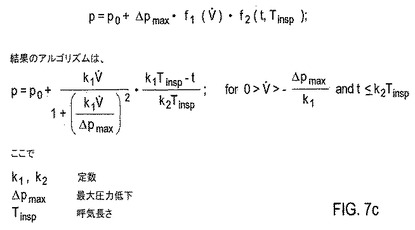
必要とされる呼吸ガス圧力pは、図7cに示された圧力誘導関数から分かる。
【0059】
本発明は、上に記載された圧力誘導関数及び典型的な実施態様に制限されない。特に、それによって、上記の関数からそれる多数の圧力誘導特徴が達成されるように、定値の呼吸ガス圧力の決定を意図した関数、又は閉じた圧力制御ループに特定された値が、パラメータ化されることが可能である。
【0060】
吸気相の間で有効である圧力、減圧間隔の幅、呼吸相検出、漏出状態の検出、及び、信号処理に基づく追加の準備(provision)によって、定値の圧力の決定に決定的である関数の他の特性の決定を考慮することも可能である。特に、ユーザの生理的状態を示す信号評価結果に基づいてピーク圧力及び最小圧力を適応させることは可能である。
【0061】
以下に記載されるように本発明が用いられる。
【0062】
閉塞性(obstructive)睡眠無呼吸患者が睡眠実験室にいるときに、過剰圧力呼吸支持に基づいた治療に対する可能性が存在するかどうかに関して評価される。この過剰圧力呼吸支持に対して、適切な治療圧力が、睡眠実験室での滞在の間に解明される。家庭で過剰圧力呼吸を行なうことに対して、基礎的装置、空気加湿機、ホース、及び呼吸マスク配置を含む呼吸ガス運搬システムは、患者に利用可能になる。
【0063】
基礎的装置は、インターフェース装置を介して構成システムに接続され、睡眠実験室の領域にいる患者に適合するように構成される。この構成では、呼吸ガスの圧力誘導が本発明に係る圧力誘導概念に従ってなされるように、基礎的装置の圧力制御特性を調整することは可能となる。その後、患者は家庭でこのように構成された装置を用いることができる。
【0064】
本発明に係る装置は、呼吸ガス圧力が、呼吸と同期して、大部分は交互に調整されるという点で識別される。呼気相の間では、呼吸ガス圧力は、圧力誘導値の指定(specification)で調整される。それは、前の呼気相の終端からずっと経過している時間tと瞬間の呼吸ガス流量との間の非線形な関係によって計算される。装置の熱の状況が、比較的大量のパワーを必要とする方法で供給装置の供給パワーを調整することの観点から臨界に(critical)なることができた場合、調整する戦略は、実際の又は見積もられた負荷の数字(figure)を考慮して、低下したパワーを引き出す(draw)か、少ない熱を解放する圧力誘導の目標に自動的に修正される。
【図面の簡単な説明】
【0065】
【図1】本質的に呼吸と同期して交替する圧力レベルで呼吸ガスを提供するための本発明に係るシステムを説明する図である。
【図2】瞬間の呼吸ガス流量に対する呼吸ガス圧力の非線形の依存性を説明する図である。
【図3】本発明に係る圧力適応のために設けられた調整準備を説明するための模式的な例示である。
【図4a】本発明に係る圧力適応に用いられた関数の第一の変形例の構成を説明する図である。
【図4b】圧力適応に用いられた関数のさらなる変形例を説明する図である。
【図5】本発明に係る関数を用いて、生成された圧力値について説明するためのデータシートである。
【図6】図5の値を示すグラフである。
【図7a】グラフに基づいて、さらに圧力誘導関数の関数コンポーネントf1を説明する要約である。
【図7b】グラフに基づいて、さらなる圧力誘導関数の関数コンポーネントf2を説明する要約である。
【図7c】引数(argument)f1及びf2から圧力誘導式を形成することを示す式の要約である。
【技術分野】
【0001】
本発明は、ユーザへの呼吸ガスを投与する(administer)ための装置に関する。さらに、本発明は、少なくともいくつかの相において周囲圧力を越える交替圧力レベルに呼吸ガスの、ユーザの側で優勢である(prevail)、静圧を調整するための方法に関する。
【背景技術】
【0002】
特に、睡眠に関連する呼吸障害の治療のために、呼吸マスク配置及びそれに連結された供給装置によって、周囲圧力を越える昇圧された圧力レベルで患者に対して、ろ過された周囲空気のような呼吸ガスを提供することが知られている。
【0003】
周囲圧力を越えて昇圧された呼吸ガス圧力(典型的には4乃至18mbarの範囲である)によって、上部気道の領域でのいかなる障害も防ぐことが可能になる。かかる障害が高い圧力レベルで呼吸ガスの投与の間に上部気道の領域で発生する可能性を低減することは、空気の固定(splinting)として知られている効果に基づいている。この固定(splinting)効果は、上部気道の領域の気道壁に作用するとともに、プロセスでこの壁を放射状に支持する圧力の結果として得られる。気道の障害に関連する部分を支持するのに必要な圧力レベルは、ユーザの生理学的ステータスに依存する。特に、上部気道の明白な狭窄がある臨床像(clinical picture)において、これらの狭窄のために吸気における流れによってもたらされた減圧は、外部の呼吸ガス圧力が必要であることを意味する。それによって、障害に関連したゾーンでの流れ抵抗によってもたらされた吸気の減圧が差し引かれたあとでさえ、適切な気道支持が保証される。呼気相の間に、気道の流れ抵抗により、支援する圧力の低下がもたらされないので、その結果、呼気では、トラッキング効果は低圧力でさえ概してまだ保証されている。
【0004】
ユーザへのできるだけ小さな圧力負荷を保持するために、呼気相又は吸気相がちょうど今起こっているかどうかを解明することは、例えば呼吸ガス流量を測定することによって知られている。患者側に優先している(prevail)呼吸ガス圧力は、吸気相では呼吸ガス圧力が呼気相よりも高いように、検出された呼吸相に応じて本質的に同期して変更することができる。ピーク圧力レベル及び圧力レベル間隔(spacing)は、睡眠実験室のユーザの検査の間に典型的に適合される。
【0005】
規定された方法で呼吸ガスの圧力を変化させることは可能である。特に、吸気相の間よりも呼気相の間において、より低い呼吸ガス圧力が有効であるように呼吸ガス圧力がガイドされる。また、治療装置の所定の開始相、又はユーザが寝入る相が完了するまで、あるいは、呼吸支持を提供される人が所定の睡眠ステージにいるならば、高い呼吸ガス圧力又は高いレベル差が例えば調整されないように呼吸ガス圧力を適応させることは可能である。
【0006】
周囲圧力を少なくとも断続的に越える圧力レベルでの呼吸ガスの投与(administration)は、送風機によって典型的に形成された、呼吸ガスを供給するための供給装置である装置によって行われる。その装置は制御ユニットを含んでいる。制御ユニットによって、供給装置の供給パワーが適合される。例えば送風機の羽根車の毎分回転数(rpm)調整によって行われる。
【0007】
この制御ユニットは、所望の圧力を調整する特徴が、制御ユニットの構成の本質的にプログラムベースの規定によって達成されるように具体化することができる。計算パワーの点から十分に装備された制御ユニットにおいて、比較的複雑な圧力調整方法を実行することが可能になり、また呼吸ガス流量信号を観察することによりユーザの瞬間の生理的なステータスに関する結論を引き出すことが可能になり、及び/又は、呼吸相を検出するとともに吸気相のためと呼気相のための異なった設定ポイント圧力レベルを計算することが可能になる。
【0008】
呼吸ガス圧力を解明する際に、問題は、呼吸の動態(dynamics)の見地から又は治療の見地から又は妨害を防止するために有利な圧力レベルを設定することが、最適でないように、又は厄介であるか不愉快でさえあるように、影響を受けたユーザによって時々主観的に知覚されるということである。
【発明の開示】
【0009】
この問題を考慮すると、本発明の目的は、心地が良いか少なくとも許容可能なものとしてユーザによって主観的に知覚されるように圧力をガイドすることを可能にするとともに、意図した治療効果の点から決定的である(definitive)呼吸の動態(dynamics)を考慮する解決策を提供することである。
【0010】
本発明の第一の態様では、この目的は、少なくともいくつかの相で周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを供給するか又は提供する以下の装置によって得られる。
すなわち、当該装置は、
呼吸ガスを供給するための供給装置と、
供給装置が、定値の呼吸ガス圧力信号により、定値の呼吸ガス圧力レベルで呼吸ガスを供給するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である(definitive)定値の呼吸ガス圧力信号を生成するための圧力指定(specification)装置と、
少なくとも瞬間の呼吸ガス圧力pと、経過時間tと、瞬間の呼吸ガス流量vとを表示するパラメータを供給するためのパラメータ収集手段と、を有し、
圧力指定装置はコンピュータ回路を含み、少なくとも呼気相において、動的又は非線形の圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮に入れ、その結果、経過時間の増加で呼吸ガス流量の範囲ととともに呼吸ガス圧力を低下させる傾向が減少する、圧力レベルへの呼吸ガス圧力の調整が達成されるように、当該コンピュータ回路は、パラメータ決定手段によって提供されたパラメータの関数として定値の呼吸ガス圧力レベルを調整するように構成される。
【0011】
この非線形の関数は、好ましくは、三角関数、又は明白な非線形の特徴を持ったものに近い関数である。特に、非線形の関数は、正接関数、正弦関数/余弦関数又はルート関数として具体化することができる。調整の引数(argument)として、特に、基準値に対する瞬間の呼吸ガス流量の比率は用いられる。この基準値は、前呼吸の呼吸ガス流量の極端な値、又は好ましくは適応した他のある方法で計算された値である。適応して計算された値として、直近の呼吸の、呼吸の設定回数の、又は所定時間内の呼吸の、平均呼吸ガス流量は、特に適切である。
【0012】
典型的な呼気相と同じ長さで続く時間の長さの呼気の後、減圧の可能性が少なくなり、任意でゼロにセットされるように、関数が好ましくは規定される。
【0013】
また、基礎的な治療圧力を越える一時的圧力増加をもたらすために規定された時間の長さ又は適応性のある記載(statement)によって計算された時間の長さが経過した後、その結果、例えば、未検出の呼気相の場合には、吸気相を開始するためのトリガー効果が生成されることが、本発明の記載(statement)として、可能である。特にある時間基準が満たされる場合、正弦特徴に依存して、実際の基礎的な治療圧力を過ぎた穏やかなオーバースイングが達成される。
【0014】
本発明の記載(statement)によって、呼吸をより簡単にするように主観的に知覚可能な方法で呼吸ガス圧力の段階的な低下をもたらすことが、吸気相のフェージングに従って、好ましくは可能になる。時間の増加で、呼気相のための減圧ポテンシャル(potential)が減少するように、減圧の範囲は時間とともに変化する。最初の呼気減圧、及びユーザに顕著に知覚可能な閾値なしで最終の呼気減圧のポテンシャル(potential)の両方を制限することが更に可能になる。そして、呼気相の終端が不正確に検出されるならば、又は執拗な漏出があるならば、治療圧力レベルへの信頼のある戻りを保証することが可能である。
【0015】
本発明の特別の態様において、呼吸ガス流量を示す信号を考慮に入れた動的又は非線形は、電装品の瞬間又はモデル化された熱負荷、又は限界温度を設定した他のタイプのコンポーネントは考慮される。このアプローチによって、装置状態を完全に利用することは特に可能になる。装置のコンポーネントは、必要ならば、非常に動的な調整を実行するためには許されないほどの高い熱負荷を有していない。温度測定値又は装置の熱負荷に関する他の種類の結論に基づいてそれほど動的でない調整が必要であるだけか、多くの制限された圧力調整範囲が推奨されたように見えるならば、より小さな圧力変化の可能性(potential)が有効であるか、他の種類の小さな圧力変化が起こるように、パラメータ適応によって、圧力調整関数(function)の対応する引数(argument)が、設計される。
【0016】
呼吸ガス供給装置の臨界のコンポーネントの見積られた熱負荷又は実際の熱負荷を考慮することによって、制御範囲を完全に利用することが時々可能になり、実際の装置負荷又は見積られた装置負荷がそれに必要と思わせるまで、この範囲を抑制(constrict)させないことが可能になる。その結果、広い制御範囲で必要ならば非常に動的な調整で動作することが、装置(それはまだ冷たい)の最初の作動相において特に可能になる。
【0017】
好ましくは、定値の圧力レベルの計算を意図した関数は、少なくとも一つの非線形の要素(member)を持った総和(summation)関数として、又は呼吸ガス流量を考慮に入れる引数(argument)を持った非線形の関数として設計されている。特に、両方とも平均呼吸ガス流量値を下回る呼吸ガス流量と、平均呼吸ガス流量値を上回る呼吸ガス流量とに対して、弱まった減圧ポテンシャルが生じる(result)ように関数が設計される。平均の呼気相には典型的である期間の終端に向けて、減圧ポテンシャルは、広範囲に制限されるか、ゼロにセットされるか、任意に逆さまにされ、その結果、圧力の僅かな過上昇(overelevation)は例えば吸気トリガーとして保証する。
【0018】
呼吸ガス流量と呼吸ガス圧力との関係のプロッティング(plotting)を用いることが圧力変化において可能である。この関係に基づいて、妨害状態がちょうど今存在するかどうかに関する結論が出される。妨害状態の評価から、呼吸ガス圧力レベル、変化帯域幅及び他の技術的な調整特徴を考慮することは可能になる。また、ユーザの瞬間の生理学的状態と、特に、その瞬間の妨害の度合いとに関する結論を出すことは、他のある方法で、又は前述の準備(provision)と組み合わせて可能である。それぞれのアプローチ、特に妨害に典型的であるか、又は、他の方法でモータ呼吸に関する結論を提示する呼吸流れプロファイルの特性を評価するための記載(statement)は、適切であり、特にそのとき有効である呼吸ガス圧力と組み合わせられる。
【0019】
また、存在するあらゆる漏出状態が検出されるか、好ましくは調整によって補われる項(term)又は引数(argument)を持った本発明の関数(function)を提供するかリンクすることも可能である。特に、著しく増加した漏出流量があるならば、圧力変化範囲の幅を抑制させることは可能である。また、ある圧力レベルに呼吸ガス圧力を大部分は一定にガイドすることは可能である。漏出状態のために設計された圧力決定記載(statement)の指定(specification)で確認され、そしてそれはユーザを意図した例えば最小のCPAP圧力に対応する。
【0020】
用語「呼吸ガス流量」は、呼吸によって指示された単位時間当たりのシフトされた体積を意味すると、現在の文脈において理解されるべきである。これに関する情報は、差圧測定バッフル(baffle)、動態的圧力測定配置、又はガスの容積流量を検出するのに適している他の種類の測定配置のような適切な測定手段によって得ることができる。制御の見地から、呼吸ガス供給装置によって引き出された(drawn)パワーのような、呼吸ガス流量を示す他の種類の情報又は信号は、評価される。呼吸ガス流量、又はそれを表す信号は、他の方法で得ることができる。特に、特性ダイアグラムで又は地図に基づいて(map-based)、送風機の毎分回転数(rpm)から、及び送風機で実施されている(prevail)圧力勾配から得ることができる。
【0021】
一定のほとばしり(flushing)、すなわち、流出開口を通じてマスクの領域からCO2を積むかもしれない空気の連続的な排出路(diversion)を備えたシステムで、結果として流量信号に永久に含まれて、圧力変化に応じてわずかに変動する値は適切に考慮され、その結果、ほとばしる流れは、呼吸又は吸気として解釈されない。ほとばしる流れの確認は、積分又は平均(mean)値の形成により、適切なモデルを用いるコンピュータによって行われて、ゼロ線に対してオフセットの形で呼吸ガス流量信号に示される。
【0022】
呼吸相の検出は、呼吸ガス流量信号の評価により、特に、ゼロ点又は閾値値の達成に関して、その第一の微分(derivation)を評価することにより、行われる。呼吸相検出のための異なった記載(statement)(体積に基づいた、曲率に基づいた、またランプ(ramp)に基づいた記載、並びに、他の種類のプロファイルに基づいた記載)は、呼吸相の中で最も信頼できる可能な検出及び識別(discrimination)を可能にするために組み合わせることができる。
【0023】
呼吸ガス流量の変化の範囲は、適切な参照パラメータを用いた割合(proportion)にセットすることができる。その結果、呼吸ガス流量の変化は、0乃至1、又は0乃至πのような標準化された範囲内にある。このように達成された標準化は、さらに三角関数によってマッピング又はプロットされ、あるいは瞬間の適切な圧力値を計算するために用いられる。呼吸ガス圧力における変化として容積流量における変化をマップピングするためにこの点で用いられるマッピング関数は、呼気のための典型的な期間内において、容積流量の中間値の範囲で、反対に容積流量の増加とともに変化が減少している間に、比較的主たる圧力変化が発生するように好ましくは設計されている。(このように、マッピング関数は、初め部分又は終端部分より中間部分においてより急勾配である(steep)。)正弦又は余弦の記載(statement)によって、特に有利なマッピング概念は、減圧値として呼気の容積流量をマッピングするために実行される。呼気相の間、圧力は、例えば次の記載(statement)で規定される。
pexp(v,t)=1/2*pbase(1+cos(π*v/vmax*(k2Tinsp-t)/(k2*Tinsp)))
式において、
pexp(v,t)は呼気の静止の呼吸ガス圧力を表す。
pbaseは、推奨された静止の吸気の治療圧力のような基礎的圧力を表す。
vは呼吸ガス流量を表す。
vmaxは、最大呼吸ガス流量を表わし、任意に平均ピーク値を表す。
k2は適応ファクタである。
Tinspは吸気相の期間であり、任意に前の呼吸サイクルの平均値である。
【0024】
さらに有利な特徴、及び特に制御ユニットの構成特徴は、従属クレームの主題である。
【0025】
本発明は、一般に特別な特徴と同様に、他の方法で引用された効果の引用された特別の装置準備又は指示に起因するもののような、圧力誘導方法(それは本発明の装置に基づいて行なわれる)に関する。
【0026】
本発明のさらなる細部及び特徴は、図面とともに以下の説明から明白になるであろう。
【発明を実施するための最良の形態】
【0027】
図1の模式図は、ユーザ1を示す。そのユーザに対して呼吸マスク3がヘッドバンド配置2によって固定される。この例における呼吸マスク3は、それが鼻領域をカバーするが、口領域を自由にするように具体化される。また、呼吸マスク3が口の開口をカバーするように呼吸マスク3を具体化することは可能である。呼吸ガスの供給は、口挿入要素、あるいは鼻孔のまわりの領域に据え付けられた単なる鼻パッドのような、他の種類の構造によって行うことができる。
【0028】
呼吸マスク3は、ホース継手プラグ4及び可撓性のホース5を介して呼吸ガス(この場合濾過された周囲空気)を提供するための装置6に接続される。装置6は、送風機7として本願で具体化された供給装置を含んでいる。供給装置は、吸込ライン8及び吸込フィルタ装置9を介して吸気側で環境と連通する。
【0029】
送風機7は圧力側で圧力ライン・セグメント10に接続される。圧力ライン・セグメント10は、マフラーセグメント(詳細に図示されていない)を介して、ホース継手スタブ11に導く。それに対して、可撓性のホース5が着脱可能に連結される。
【0030】
圧力ライン・セグメント10の領域では、呼吸ガス流量を示す信号をピックアップするための信号ピックアップ装置12がある。本願に示された典型的な実施態様では、信号ピックアップ装置は、測定バッフル配置と共同で具体化される、呼吸ガス流量を示す信号は、差圧の、すなわち、測定バッフル配置の上流及び下流での圧力の差の、信号の形でピックアップされる。呼吸ガス流量を示す信号は、他の方法で、例えば、描かれた(drawn)モーターパワーを検出する方式で、聴覚の効果に基づいて、例えば、通り過ぎる呼吸ガスの流れを示す方法でそらされる光学導波管によって、得られる。
【0031】
吸込ライン8と圧力ライン・セグメント10との間の送風機7によって構築された差圧が、送風機7に設けられた羽根車の毎分回転数(rpm)の調整により調整可能であるように、送風機7が具体化される。また、吸込ライン8と圧力ライン・セグメント10との間に存在する差圧を制御又は調整するための他の準備(provision)をなすことは可能である。かかる準備は、特にバイパスライン又は送風機7の内部に作られた準備の形をとってもよい。
【0032】
本願に示された典型的な実施態様では、吸込ライン8と圧力ライン・セグメント10との間で有効である差圧は、送風機7の羽根車の毎分回転数(rpm)の調整によって適応される。その目的のために、送風機7の駆動装置は、トリガーライン13によって制御ユニット14に接続される。制御ユニット14は、この制御ユニット14によって実施された最終分析において存する圧力の調整概念が、適切なプログラムデータセットを格納することによりプログラムに基づいた方法で規定されるように、好ましくは具体化される。特に好ましくは、それによって、意図した特別の治療に適応された圧力調整概念が実行されるように、制御ユニット14が具体化される。これらの圧力調整概念は、適切な記憶素子15における制御ユニット14に直接に格納される。交換可能ユニットとして記憶素子15を具体化することも可能である。その結果、適用可能な制御概念は、制御ユニット14の中に、又はその制御ユニット上に対応する記憶素子又は回路ユニットを挿入するか又は結合することによって提供される。また、制御ユニット14にインターフェース装置を提供することは可能である。その結果、制御ユニット14の適切な構成は、構成システムに一時的接続としてもたらされる。
【0033】
本願に示された典型的な実施態様では、データセットは記憶素子15に格納される。また、それによって、呼吸マスク3を介してユーザ1に適用された呼吸ガス圧力の適応は、呼吸と同期して断続的な交互の圧力レベルを提供する圧力調整概念によって規定されるように、なされる。
【0034】
これらの圧力レベルは、非線形の圧力誘導関数によって、呼気相に対して及び任意に吸気相に対して特に設定される。この非線形の圧力誘導関数は、例えば、時間t及び瞬間の呼吸ガス流量vに依存する3次元関数fとして表わされる。本願に示されたこの関数fに従って、呼気相の間での経過時間及び瞬間の呼吸ガス流量の関数として、減圧及び任意には吸気相の始めの圧力の僅かな過上昇(overelevation)は、もたらされる。
【0035】
瞬間の呼吸ガス流量を示して信号ピックアップ装置12によってピックアップされた信号に加えて、それは、瞬間的に設定された呼吸ガス圧力と、装置6のあるコンポーネントの実際に実施された熱負荷(モデルの記載(statement)によって計算された)とを考慮するように、制御ユニット14は更に具体化される。
【0036】
特に、装置6の制限値熱負荷に到達するまで、呼吸ガス圧力調整は、比較的高い動的な調整で、又は比較的広い圧力変化範囲で行われるように、制御ユニット14が構成される。これによって、特に患者が眠りにつく相において、圧力調整スペクトルを完全に利用する間に特に快適な圧力調整を得ることが可能になる。
【0037】
制御ユニットは、第一に、標準構成の形で、予定される(possible)ユーザを意図した治療圧力(CPAP圧力のようなもの)の好ましくは大きな大振りの無い(overswing-free)調整をなすように具体化される。
【0038】
使用又は処理のある例のみに対して、より複雑な圧力制御概念を実施するための制御ユニット14が構成されている。この特別な構成は、設定点圧力信号のより複雑な計算を意図した制御モジュールで制御ユニット14が拡張されるように作られる。その結果、インターフェース情報として、制御モジュールによって必要とされる定値の(set-point)圧力だけが交換される。定値の圧力を解明する際に、特定装置の特性、特に送風機7の伝達挙動を考慮することが可能である。その結果、定値の圧力信号の指定(specification)によって、システムのある伝達特性が既に考慮される。この場合、定値の圧力信号は、最後に調整される圧力に対応しないが、必要な圧力を得るために前もって必要とされた制御変数に対応する。
【0039】
図2が示すように、特に記憶素子15に蓄えられたデータセットによる制御ユニット14の調整戦略(strategy)を規定することにより、制御ユニット14の本発明に係る構成に基づいて、少なくともいくつかの相において呼吸と同期して交替する呼吸ガス圧力レベルを設定することが可能になる。
【0040】
経過時間、瞬間の呼吸ガス流量、及び呼吸ガスを提供するために設けられた供給装置の熱負荷を特に表示する手順によって、心地が良いとしてユーザによって主観的に知覚可能な方法で呼気相の間に呼吸ガス圧力を減少することが可能になる。減圧は、呼気の呼吸ガス流量への減圧の関係が、本来的に著しく非線形であり、特に時間とともに変わるようになされる。その結果、特に平均呼気サイクルに典型的な時間相の終端方向に向かって、妨害を防ぐことを意図した治療圧力レベルへのリターンを得ることが可能になる。また、呼気相の終端に向かって、又は吸気相の初期段階において、意図した呼吸圧力レベル以上のある圧力の過上昇(overelevation)が得られるように、関数を設計することは可能である。
【0041】
第一の呼吸サイクルaにおいて、呼吸ガス流量に関して非線形である減圧は、本発明に係る関数に基づいて、呼気相の間得られる。呼吸サイクルbの間に、圧力誘導関数の適応のために、減圧と瞬間呼吸ガス流量との間で非比例で、著しく非線形である関係が生じる。
【0042】
例えば供給装置の既に進んだ熱負荷に基づいて、呼吸サイクルcに対して、結果は、1つの、呼気相の間での呼吸ガス流量と圧力低下とのさらに変化した非比例で非線形である関係が生じる。
【0043】
図3は、呼吸ガスの静水圧P(患者に適用される)を適応させるための本発明に係る閉じた制御ループを示す。この呼吸ガス圧力は送風機7によって構築される。送風機7の供給パワーは、制御モジュールm1によって適応される。この制御モジュールm1は、圧力信号Pのフィードバックの目的で、閉じた制御ループの一部を形成することができる。
【0044】
圧力指定(specification)信号SPは、パイロット制御モジュールm2によって圧力制御モジュールm1に届けられる。パイロット制御モジュールm2によって、圧力指定モジュールm3によって指定された定値は、制御モジュールm1を含む閉じた制御ループの伝達挙動の点から有利に処理される圧力制御信号SPにおいて生成されるようにパイロット制御モジュールm2が具体化される。個別のモジュールm1,m2,m3としてここに示された制御ユニットは、すべて、プログラムベースで、互いに噛み合った(intermeshed)形で、単一のコンピュータ装置において実現される。
【0045】
しかしながら、制御モジュールm1が、圧力指定信号SPを生成するための様々な可能性を許可する標準の又は基礎的な装置のコンポーネントであるように制御モジュールm1を形成することも可能である。例えば、呼吸ガス供給装置6(図1を参照)の基礎的又は標準の構成において、ユーザは圧力指定信号SPを単純な入力装置を用いて調整することができる。
【0046】
装置6を改造するか又は装着する場合には、制御ユニット14又は制御ユニット15の構成は、プログラムに基づいた方法で修正される。また、制御圧力信号SPを供給するために、追加の信号処理のハードウェア又はデータ処理のハードウェア又はデータ記憶媒体(medium)のハードウェアを備えた制御ユニット14を装備させることは可能である。
【0047】
圧力指定モジュールm3によって、特に、瞬間の呼吸ガス流量を示す信号が処理される。それは、例えば図1に示される信号ピックアップ装置12によって得られる。また、時間情報と同様に、モジュールm3によって、装置6の瞬間の熱負荷及びその瞬間に患者に印加された圧力pに関する情報が処理される。時間情報、そして任意に装置の熱状態に関する情報は、計時装置又はタイマ装置によってモジュールm3に直接に提供される。熱負荷も、装置6の領域に設けられた温度検出手段によって、又はモジュールm3の領域でのモデル記載(statement)によって検出される。装置6の熱負荷を検出するために、又は熱負荷を見積もるために、装置の領域でピックアップされる他の情報又は信号を評価することも可能である。特に、送風機モータの熱負荷の確認のために送風機によって取り込まれた(drawn)パワーに関する情報を解明するか、送風機モータをトリガーするために設けられたパワー・ステージを解明することは可能である。かかる情報は、圧力指定信号SP、圧力指定信号SPを得るために生成された中間結果、又はパワー・ステージをトリガーするための信号から得ることができる。
【0048】
送風機モータがそれと結合された羽根車を必要な呼吸ガス圧力が達成される速度で回転させるように制御モジュールm1が送風機モータをトリガーするように制御モジュールm1が具体化される。送風機の毎分回転数(rpm)の変化は、駆動モーターに提供されたパワーの規定された設定によって設定される。特に速い圧力変化を達成するために、制御モジュールm1によって、それによって、羽根車装置又はそうでなければ移動した集合体(mass)を一時的にブレーキをかけるブレーキモーメントが生成されるようにモータを操作することが任意に可能である。制御モジュールm1によってモータトリガー操作を実現することが可能である。モータトリガー操作で、少なくとも断続的で本質的に、パワーがモータに提供されない。また、送風機は特に呼吸ガス圧力の影響下で、プロセスにおいてそれ自体でブレーキをかける。この種の減圧は、モータ上の最小の可能な熱負荷の目的として有利であることを立証する。
【0049】
呼吸ガス圧力を変化させるための対応する概念は、供給装置又は連関したパワー・ステージ上の瞬間の熱負荷の関数として任意に選択される。例えば、高い熱負荷又は少なくとも見積られた高い熱負荷が有効である装置状態において、熱負荷での許されない大きなさらなる増加が期待されるべきでないように送風機の羽根車装置の圧力変更又は毎分回転数(rpm)変更をなすことは特に可能である。
【0050】
患者に加えられた呼吸ガス圧力の変化が、送風機羽根車の羽根車の毎分回転数(rpm)を変更すること以外のある方法でもたらされる場合には、制御モジュールm1によって、バイパス弁又は他の種類の制御ユニットのような対応する制御構造がトリガーされる。
【0051】
患者に加えられた圧力に決定的である結果を解明するための、圧力指定モジュールm3の領域での本発明にしたがって実行された非線形の関数は、演算子O1、O2によってともにリンクされた複数の引数(argument)A1,A2,・・・,ANを有するように具体化される。引数(argument)A1は、三角関数であり、特に、正弦関数、余弦関数又は正接関数である。その角度の増分(increment)は瞬間の呼吸ガス流量vを反映するパラメータを考慮している。引数(argument)A2によって、タイミング回路が実現される。それによって、引数(argument)A1の影響(effect)の所望の減衰は、増加する経過時間で、特に前の吸気相の終端以来ずっと進行している時間で可能になる。
【0052】
引数(argument)ANは、装置の瞬間的に有効である熱負荷、又は装置の見積もられた熱負荷を反映する役目をすることができる。演算子O1,O2は、特に乗算演算子(multiplication operator)として実現される。引数(argument)A1,A2,・・・AN及び連関した演算子(operator)O1,O2,・・・ONによって実現された全圧力誘導(guidance)関数は、任意に直列に分類され(broken down)、圧力指定モジュールm3の領域において適切な近似で実施される。
【0053】
図4bに提案されるように、引数(argument)A1が瞬間の呼吸ガス圧力と瞬間的に実施される呼気の呼吸ガス流量との間で所定の非線形の関係を反映するように引数(argument)A1を設計することも可能である。その目的のために、少なくとも一つのさらなる引数(argument)、特に引数(argument)A1の増分(increment)として時間の引数(argument)A2を提供することが可能である。引数(argument)ANは、特に乗算器(multiplier)としてのO2とともに、演算子O2を介して、引数(argument)A1に関数的にリンクされる。引数(argument)A1のさらに増分(increment)として、呼吸ガス圧力の指定(specify)を意図した関数に、引数(argument)ANを組み入れることも可能である。
【0054】
図5は、図4aに示された構成(makeup)の非線形の関数に基づいた、圧力曲線を示している。図4aにおいて、引数(argument)A1及びA2は、正接関数によって表わされ、演算子(operator)O1は、乗算器(multiplier)である。
【0055】
図6は、示された関数に基づいて計算された治療圧力を示す。吸気相の間、治療圧力は、所定値に、本願では例えば20 mbarに維持される。呼気相の間、治療圧力が減少する。その低下は、呼気相の間、有効である呼吸ガス流量と非線形に関連している。
【0056】
図7a、7b及び7cにおいて、呼気相の間、異なった圧力レベルに低下した治療圧力を解明するためのさらなる関数が示される。ここに示された関数は、図4aに図示されたスキームに対してその構成において一致する。引数(argument)f1は、非線形の引数(argument)である。引数(argument)f1は、瞬間の呼吸ガス流量を考慮するために用いられる。引数(argument)f2は、タイミング要素(member)を組込むために用いられる。引数(argument)f1によって、図7aに組み入れられた図面a)から分かるように、呼気の呼吸ガス流量と連関した減圧との間の関係が達成される。
【0057】
図7bに示された関数f2により、引数(argument)f1によって達成される減圧の減衰(attenuation)は、吸気相の終端からずっと経過している時間の関数として得られる。ここに示された関数では、このタイミング要素は、図7bに組み入れられた図面b)から分かる抑制効果を有する。
【0058】
必要とされる呼吸ガス圧力pは、図7cに示された圧力誘導関数から分かる。
【0059】
本発明は、上に記載された圧力誘導関数及び典型的な実施態様に制限されない。特に、それによって、上記の関数からそれる多数の圧力誘導特徴が達成されるように、定値の呼吸ガス圧力の決定を意図した関数、又は閉じた圧力制御ループに特定された値が、パラメータ化されることが可能である。
【0060】
吸気相の間で有効である圧力、減圧間隔の幅、呼吸相検出、漏出状態の検出、及び、信号処理に基づく追加の準備(provision)によって、定値の圧力の決定に決定的である関数の他の特性の決定を考慮することも可能である。特に、ユーザの生理的状態を示す信号評価結果に基づいてピーク圧力及び最小圧力を適応させることは可能である。
【0061】
以下に記載されるように本発明が用いられる。
【0062】
閉塞性(obstructive)睡眠無呼吸患者が睡眠実験室にいるときに、過剰圧力呼吸支持に基づいた治療に対する可能性が存在するかどうかに関して評価される。この過剰圧力呼吸支持に対して、適切な治療圧力が、睡眠実験室での滞在の間に解明される。家庭で過剰圧力呼吸を行なうことに対して、基礎的装置、空気加湿機、ホース、及び呼吸マスク配置を含む呼吸ガス運搬システムは、患者に利用可能になる。
【0063】
基礎的装置は、インターフェース装置を介して構成システムに接続され、睡眠実験室の領域にいる患者に適合するように構成される。この構成では、呼吸ガスの圧力誘導が本発明に係る圧力誘導概念に従ってなされるように、基礎的装置の圧力制御特性を調整することは可能となる。その後、患者は家庭でこのように構成された装置を用いることができる。
【0064】
本発明に係る装置は、呼吸ガス圧力が、呼吸と同期して、大部分は交互に調整されるという点で識別される。呼気相の間では、呼吸ガス圧力は、圧力誘導値の指定(specification)で調整される。それは、前の呼気相の終端からずっと経過している時間tと瞬間の呼吸ガス流量との間の非線形な関係によって計算される。装置の熱の状況が、比較的大量のパワーを必要とする方法で供給装置の供給パワーを調整することの観点から臨界に(critical)なることができた場合、調整する戦略は、実際の又は見積もられた負荷の数字(figure)を考慮して、低下したパワーを引き出す(draw)か、少ない熱を解放する圧力誘導の目標に自動的に修正される。
【図面の簡単な説明】
【0065】
【図1】本質的に呼吸と同期して交替する圧力レベルで呼吸ガスを提供するための本発明に係るシステムを説明する図である。
【図2】瞬間の呼吸ガス流量に対する呼吸ガス圧力の非線形の依存性を説明する図である。
【図3】本発明に係る圧力適応のために設けられた調整準備を説明するための模式的な例示である。
【図4a】本発明に係る圧力適応に用いられた関数の第一の変形例の構成を説明する図である。
【図4b】圧力適応に用いられた関数のさらなる変形例を説明する図である。
【図5】本発明に係る関数を用いて、生成された圧力値について説明するためのデータシートである。
【図6】図5の値を示すグラフである。
【図7a】グラフに基づいて、さらに圧力誘導関数の関数コンポーネントf1を説明する要約である。
【図7b】グラフに基づいて、さらなる圧力誘導関数の関数コンポーネントf2を説明する要約である。
【図7c】引数(argument)f1及びf2から圧力誘導式を形成することを示す式の要約である。
【特許請求の範囲】
【請求項1】
呼吸ガスを供給するための供給装置と、
供給装置が、定値の呼吸ガス圧力信号により、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように、供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有して、
前記圧力指定装置はコンピュータ回路を含み、呼吸ガス流量及び経過時間を示すパラメータを考慮に入れ、結果として、呼吸ガス流量の範囲ととともに呼吸ガス圧力を低下させることへの傾向が増加する経過時間で減少する動的又は非線形の圧力誘導関数に基づいて計算される、呼吸ガス圧力の圧力レベルへの調整が少なくとも呼気相において達成されるような方法で、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するように、コンピュータ回路が構成されることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項2】
パラメータVIがパラメータ決定手段によって提供され、パラメータVIが、前の呼吸の間の吸気体積に対応するか、又は複数の前の呼吸の平均吸気体積に対応することを特徴とする、請求項1記載の装置。
【請求項3】
パラメータVmaxがパラメータ決定手段によって提供され、パラメータVmaxが、前の呼吸の間の吸気流量値に対応するか、又は複数の前の呼吸の平均吸気流量値に対応することを特徴とする、請求項1又は2に記載の装置。
【請求項4】
送風機又は他の電装品の熱負荷を示すパラメータTが、パラメータ決定手段によって提供されることを特徴とする、請求項1乃至3のいずれか一つに記載の装置。
【請求項5】
熱負荷がモデル記載に基づいて見積もられることを特徴とする、請求項1乃至4のいずれか一つに記載の装置。
【請求項6】
負荷制限値が許容可能な方法で実行されるように装置が操作されることを特徴とする、請求項1乃至5のいずれか一つに記載の装置。
【請求項7】
初期のランプ相の間に、ランプ相の終端に向かうより、大きな減圧が達成されるように、圧力調整動態がランプ記載の指定に基づいて適応されることを特徴とする、請求項1乃至6のいずれか一つに記載の装置。
【請求項8】
コンピュータ回路の構成は、データ記憶媒体によって達成されることを特徴とする、請求項1乃至7のいずれか一つに記載の装置。
【請求項9】
データ記憶媒体がメモリーカードとして設計されていることを特徴とする、請求項8に記載の装置。
【請求項10】
圧力レベル間隔が平均圧力又はピーク圧力の関数として規定されるように圧力誘導が達成されることを特徴とする、請求項1乃至9のいずれか一つに記載の装置。
【請求項11】
許容可能なレベル間隔が最小の圧力レベルの増加とともに増加することを特徴とする、請求項10に記載の装置。
【請求項12】
圧力誘導関数が正接関数、正弦関数、余弦関数、平方根関数及び/又は指数関数として設計されていることを特徴とする、請求項1乃至11のいずれか一つに記載の装置。
【請求項13】
その第一の微分(dv/dt2)が平均の呼吸ガス流量の範囲で最大値を有するように圧力誘導関数が適応されることを特徴とする、請求項1乃至12のいずれか一つに記載の装置。
【請求項14】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有し、
前記圧力指定装置はコンピュータ回路を含み、圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮し、その結果、呼吸ガス流量の範囲とともに呼吸ガス圧力を低下させることへの傾向は、経過時間の増加とともに減少する、圧力レベルへの呼吸ガス圧力の調整が少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するようにコンピュータ回路が構成されていることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項15】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有し、
圧力指定装置はコンピュータ回路を含み、圧力誘導関数に基づいて計算され、装置の熱負荷を示すパラメータを考慮して、その結果、呼吸ガス圧力を低下させることへの傾向は、熱負荷のレベルとともに減少する、圧力レベルへの呼吸ガス圧力の調整は、少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するようにコンピュータ回路が構成されていることを特徴とする、少なくともいくつかの相で周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項16】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を用いて、
圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮し、その結果、呼吸ガス流量の範囲とともに呼吸ガス圧力を低下させることへの傾向は、経過時間の増加とともに減少する、圧力レベルへの呼吸ガス圧力の調整が少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数として定値の呼吸ガス圧力レベルが調整されることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供する方法。
【請求項1】
呼吸ガスを供給するための供給装置と、
供給装置が、定値の呼吸ガス圧力信号により、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように、供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有して、
前記圧力指定装置はコンピュータ回路を含み、呼吸ガス流量及び経過時間を示すパラメータを考慮に入れ、結果として、呼吸ガス流量の範囲ととともに呼吸ガス圧力を低下させることへの傾向が増加する経過時間で減少する動的又は非線形の圧力誘導関数に基づいて計算される、呼吸ガス圧力の圧力レベルへの調整が少なくとも呼気相において達成されるような方法で、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するように、コンピュータ回路が構成されることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項2】
パラメータVIがパラメータ決定手段によって提供され、パラメータVIが、前の呼吸の間の吸気体積に対応するか、又は複数の前の呼吸の平均吸気体積に対応することを特徴とする、請求項1記載の装置。
【請求項3】
パラメータVmaxがパラメータ決定手段によって提供され、パラメータVmaxが、前の呼吸の間の吸気流量値に対応するか、又は複数の前の呼吸の平均吸気流量値に対応することを特徴とする、請求項1又は2に記載の装置。
【請求項4】
送風機又は他の電装品の熱負荷を示すパラメータTが、パラメータ決定手段によって提供されることを特徴とする、請求項1乃至3のいずれか一つに記載の装置。
【請求項5】
熱負荷がモデル記載に基づいて見積もられることを特徴とする、請求項1乃至4のいずれか一つに記載の装置。
【請求項6】
負荷制限値が許容可能な方法で実行されるように装置が操作されることを特徴とする、請求項1乃至5のいずれか一つに記載の装置。
【請求項7】
初期のランプ相の間に、ランプ相の終端に向かうより、大きな減圧が達成されるように、圧力調整動態がランプ記載の指定に基づいて適応されることを特徴とする、請求項1乃至6のいずれか一つに記載の装置。
【請求項8】
コンピュータ回路の構成は、データ記憶媒体によって達成されることを特徴とする、請求項1乃至7のいずれか一つに記載の装置。
【請求項9】
データ記憶媒体がメモリーカードとして設計されていることを特徴とする、請求項8に記載の装置。
【請求項10】
圧力レベル間隔が平均圧力又はピーク圧力の関数として規定されるように圧力誘導が達成されることを特徴とする、請求項1乃至9のいずれか一つに記載の装置。
【請求項11】
許容可能なレベル間隔が最小の圧力レベルの増加とともに増加することを特徴とする、請求項10に記載の装置。
【請求項12】
圧力誘導関数が正接関数、正弦関数、余弦関数、平方根関数及び/又は指数関数として設計されていることを特徴とする、請求項1乃至11のいずれか一つに記載の装置。
【請求項13】
その第一の微分(dv/dt2)が平均の呼吸ガス流量の範囲で最大値を有するように圧力誘導関数が適応されることを特徴とする、請求項1乃至12のいずれか一つに記載の装置。
【請求項14】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有し、
前記圧力指定装置はコンピュータ回路を含み、圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮し、その結果、呼吸ガス流量の範囲とともに呼吸ガス圧力を低下させることへの傾向は、経過時間の増加とともに減少する、圧力レベルへの呼吸ガス圧力の調整が少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するようにコンピュータ回路が構成されていることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項15】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を有し、
圧力指定装置はコンピュータ回路を含み、圧力誘導関数に基づいて計算され、装置の熱負荷を示すパラメータを考慮して、その結果、呼吸ガス圧力を低下させることへの傾向は、熱負荷のレベルとともに減少する、圧力レベルへの呼吸ガス圧力の調整は、少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数としてコンピュータ回路が定値の呼吸ガス圧力レベルを調整するようにコンピュータ回路が構成されていることを特徴とする、少なくともいくつかの相で周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供するための装置。
【請求項16】
呼吸ガスを供給するための供給装置と、
定値の呼吸ガス圧力信号により、供給装置が、定値の呼吸ガス圧力レベルで呼吸ガスを提供するように供給装置をトリガーするための圧力調整装置と、
定値の呼吸ガス圧力レベルに関して決定的である定値の呼吸ガス圧力信号を生成するための圧力指定装置と、
少なくとも瞬間の呼吸ガス圧力p、経過時間t及び瞬間の呼吸ガス流量vを表示するパラメータを提供するためのパラメータ決定手段と、を用いて、
圧力誘導関数に基づいて計算され、呼吸ガス流量及び経過時間を示すパラメータを考慮し、その結果、呼吸ガス流量の範囲とともに呼吸ガス圧力を低下させることへの傾向は、経過時間の増加とともに減少する、圧力レベルへの呼吸ガス圧力の調整が少なくとも呼気相において達成されるように、パラメータ決定手段によって提供されたパラメータの関数として定値の呼吸ガス圧力レベルが調整されることを特徴とする、少なくともいくつかの相において周囲圧力を越える交互の呼吸ガス圧力レベルで呼吸ガスを提供する方法。
【図1】

【図2】
【図3】
【図4a】
【図4b】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【図2】
【図3】
【図4a】
【図4b】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【公表番号】特表2008−531157(P2008−531157A)
【公表日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願番号】特願2007−557446(P2007−557446)
【出願日】平成18年3月6日(2006.3.6)
【国際出願番号】PCT/EP2006/002036
【国際公開番号】WO2006/094744
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(506153697)エムアーペー・メディツィーン−テヒノロギー・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング (10)
【氏名又は名称原語表記】MAP Medizin−Technologie GmbH
【公表日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願日】平成18年3月6日(2006.3.6)
【国際出願番号】PCT/EP2006/002036
【国際公開番号】WO2006/094744
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(506153697)エムアーペー・メディツィーン−テヒノロギー・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング (10)
【氏名又は名称原語表記】MAP Medizin−Technologie GmbH
[ Back to top ]