
呼吸不全の存在下での換気サポートの全身制御のための方法及び装置
【課題】自発呼吸する患者に対する換気支援を行なうための方法及び装置。
【解決手段】自発呼吸する患者に対する換気支援を行なうための方法であって、呼吸気流量を決定するステップと、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、現在の呼吸サイクルの位相を決定するステップと、(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅と、(c)前記差分測定値の大きさに応じて変化するゲイン係数との積の関数である圧力で、患者に対してエアーを供給するステップと、を連続的に繰り返すことを備える方法。装置は、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、ブロワにより患者に対してエアーを供給させる制御機構とを備える装置。
【解決手段】自発呼吸する患者に対する換気支援を行なうための方法であって、呼吸気流量を決定するステップと、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、現在の呼吸サイクルの位相を決定するステップと、(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅と、(c)前記差分測定値の大きさに応じて変化するゲイン係数との積の関数である圧力で、患者に対してエアーを供給するステップと、を連続的に繰り返すことを備える方法。装置は、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、ブロワにより患者に対してエアーを供給させる制御機構とを備える装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、患者の呼吸サイクルと同期し且つ呼吸不全の存在下で最小限の十分なレベルのサポートを行なうように制御される、換気支援を行なうための方法及び装置に関する。
【背景技術】
【0002】
呼吸不全は、ガス交換に悪影響を及ぼして酸素の動脈分圧を低下させるとともに二酸化炭素の動脈分圧を高める呼吸器系の異常である。呼吸不全は、正常な肺、肺異常、又は、これらの組み合わせの存在下での換気量の減少に起因している。
【0003】
呼吸不全は、一般に、呼吸器の働きの低下や体位因子を含む様々な理由により、睡眠中におけるガス交換の悪化をもたらす。REM睡眠段階中における随意筋機能の低下により、特定の患者における呼吸の副筋の重要性に応じて、この睡眠段階中に呼吸機能が著しく悪化する場合がある。
【0004】
睡眠は、閉塞型睡眠時無呼吸症候群(OSA)と称される様々な度合いの上気道閉塞に関連付けられる場合がある。
【0005】
睡眠呼吸障害(SDB)は、一般に、睡眠中に生じるある種の呼吸中断のことである。睡眠呼吸障害の最も一般的な形態が閉塞型睡眠時無呼吸症候群(OSA)である。大きい断続的ないびき、無呼吸、呼吸低下はOSAを特徴付ける。
【0006】
呼吸不全及びOSAは、胸壁、神経筋、筋萎縮性側索硬化症(ALS)、あるいは、慢性閉塞性肺疾患(COPD)などの肺病を持つ患者が直面する状態と関連して発現する。睡眠時無呼吸の症状は先駆物質の結果として現れるため、SDBは、睡眠中に無呼吸及び/又は呼吸低下を呈する任意の病的状態を説明するために使用される一般的な用語になってきた。無呼吸及び呼吸低下は、ガス交換や断片睡眠を妨げ、しばしば酸素脱飽和を引き起こす。重症の場合、患者は、、毎晩何百回もこれらの酸素脱飽和に直面して睡眠から目覚める場合がある。
【0007】
OSAの最も一般的な治療は、持続的気道陽圧法(CPAP)を行なうことである。CPAPは、Sullivanによって発明され、米国特許第4,944,310号において教示されている。簡単に述べると、CPAP治療は、通常4〜20cmH2Oの範囲で陽圧を与えることにより気道の空気スプリント(pneumatic splint)としての機能を果たす。空気(エアー)はモータ駆動のブロワによって気道へ供給され、ブロワの出口は、空気供給ホースにより、患者の顔に密着する鼻(鼻及び/又は口)マスクに対して結合されている。マスクに近い供給チューブには排気ポートが設けられている。
【0008】
換気支援は、2レベル(bi−level)人工呼吸器、比例支援(proportional assist)人工呼吸器、サーボ制御人工呼吸器によって行なわれてもよい。各タイプの人工呼吸器は、患者の呼吸を支援するための異なる方法を利用して、異なる目的を達成する。
【0009】
そのような人工呼吸装置は、患者の変化する状態に対して適切な応答を行なう。例えば、人工呼吸装置は、吸気及び呼気サポートに関連付けられた様々な圧力レベルをトリガして循環させるべき時期を決定し、それにより、患者の呼吸サイクルと同期する。トリガは、患者の吸気を対象とする圧力レベルの開始に関連付けられる事象である。循環は、患者の呼気を対象とする圧力レベルへの切り換えに関連付けられる事象である。また、装置は、過小換気又は過換気のそれぞれの期間中に換気量を増大させあるいは減少させるための何らかの方法を提供してもよい。これらの部分の一方又は両方において機械性能を最大にすると、患者の快適さが高まり、呼吸不全の治療が良好になる。
【0010】
単純な2レベル人工呼吸器は、患者の呼吸サイクルの吸気部分いわゆるIPAPの間にわたって高圧を供給するとともに、患者の呼吸サイクルの呼気部分いわゆるEPAPの間にわたって低圧を供給する。伝統的には、切り換えは、呼吸流量又は圧力を監視するとともに閾値レベルを規定することにより行なうことができる。測定値が閾値を越えると、装置はIPAP圧力をトリガする。測定値が閾値を下回ると、装置はEPAP圧力へ循環させる。そのような切り換えに代わる他の方法は、呼吸速度の記録、吸気又は呼気のいずれかの開始からの経過時間の監視を伴っている。機械は、呼吸サイクルの前の部分における期待時間に達した後、呼吸サイクルの後の部分、すなわち、吸気又は呼気のいずれかに切り換わってもよい。
【0011】
ResMed社によって開発された異なるサーボ人工呼吸装置は、計算された瞬間位相に基づいてスムーズな循環圧変化を与えることにより同期を行なう。装置の実施形態は、同一出願人による米国特許出願第09/661,998号及び米国特許第6,532,957号,第6,532,959号の主題であり、その開示内容は参照として本明細書に組み込まれる。一般に、装置は、以下のように、患者の気道抵抗Rの一部分(この一部分は、ゼロから実質的な値までの範囲にわたっているが、1未満である)、呼吸気流量f(t)、振幅A、圧力波形テンプレートΠ(Φ)に適用される患者の瞬間呼吸位相Φの推定値に基づいて、瞬間マスク圧力P(t)を供給する。
【数1】

【0012】
この種の人工呼吸器において、V(t)は、例えば、呼吸気流量f(t)の絶対値の半分であってもよい。換気量目標値VTGTは、気流量の測定量のパーセンテージ、例えば平均分時拍出量の95%又は予め設定された所定の分時拍出量であってもよい。Gは、積分サーボコントローラのゲインであり、0.1〜0.3cmH2O/(L/min)換気量エラー/秒の範囲の値が適している。AMIN及びAMAXは、快適及び安全のためにサポートAの度合いに関して設定された限界値である。一般的には、0.0及び20.0cmH2Oの限界値がそれぞれ適している。
【0013】
患者の呼吸位相を検出する際、装置は、呼吸の特定の位相に関連付けられたファジー理論規則の組のための入力データとして、呼吸気流量信号及びその微分を使用する。規則の評価結果を使用することにより、1つの連続的な位相変数が得られ、この位相変数は瞬間呼吸位相として使用される。圧力波形テンプレートに適用されるこの位相値は、その後、現実的で快適な呼吸サイクルを生成する態様で、供給された圧力を比例的に変化させる。同時に、目標換気量VTGTに基づくAの計算により、所望レベルの換気量が保証される。
【0014】
同期の問題に関しては、患者の呼吸サイクルを検出する際に連続的な瞬間位相を決定することが有益であるが、簡単な関数Π(Φ)を使用せずに患者に対して供給される圧力を決定する方法を使用して、前記方程式のAに掛け合わされる数を決定することが望ましい場合もある。また、吸気圧の開始をトリガするための代替の方法を利用することが有益である可能性がある。
【0015】
変化する患者呼吸要求に対する圧力応答の制御に関しては、前記方程式において、圧力サポートの変化率が、目標換気量と実際の換気量との間の差に単純に比例する。小さいエラーにおいては応答が穏やかになり、特に著しい過小換気においては応答が更に活発になることが望ましい可能性がある。これは、結果として著しい低酸素症を招く可能性が高いからである。これに対し、測定換気量が目標を大きく上回っている場合には、特に非侵襲的換気システムで突然に漏れの変化が生じた際に漏れ評価システムが漏れの変化を実質的に補償するまで測定換気量がほぼ必ず実際の換気量よりも多くなることを考えると、換気サポートレベルを活発に減少させる必要はなくあるいはそのようにすることが望ましくない。
【0016】
目標全換気量(従来から「分時換気量」と呼ばれている)における人工呼吸器に伴う問題は、全換気量が、患者の実際の要求を満たす程度の正確な指標を与えない場合があるということである。そのような指標は、患者が解剖学的及び生理学的な死腔を有するという事実及び死腔が患者間で異なっているという事実を明らかにしない。特に、特定の全換気量において、高い呼吸数及び低い1回換気量は、低い呼吸数及び高い1回換気量よりも低い肺胞換気量を与える。したがって、分時換気量をサーボ制御する装置は、高い呼吸数で不十分な肺胞換気量を与える虞がある。
【発明の概要】
【発明が解決しようとする課題】
【0017】
本発明の目的は、患者の呼吸サイクルと同期して吸気中に高レベルの圧力サポートを行なうとともに呼気中に低レベルの圧力サポートを行なう人工呼吸器を提供することである。
【0018】
本発明の更なる目的は、流量トリガされるが位相循環されるそのような同期人工呼吸器を提供することである。
【0019】
本発明の更に他の目的は、少なくとも目標換気量を維持するとともに、エラーに対してリニアとならず且つゼロエラーに対して対称とならないように換気量のエラーに応答する人工呼吸器を提供することにある。
【0020】
本発明の他の目的は、異なる速度で応答する2つの測定値を使用することにより、圧力サポートの両方のスムーズな変化を可能にするとともに、ゲインがエラーの関数であり、それでも、著しい過小換気に対して急速に応答する人工呼吸器を提供することである。
【0021】
本発明の他の目的は、肺胞換気量をサーボ制御する人工呼吸器を提供することである。
【0022】
本発明の以下の説明を考慮すれば、更なる目的は当業者にとって明らかである。
【課題を解決するための手段】
【0023】
本発明の1つの態様は、患者人工呼吸器同期を伴っている。本発明においては流量が測定される。流量の測定値を用いると、ファジー理論方法により瞬間呼吸位相変数が決定される。その後、人工呼吸器は、測定流量が閾値を越えると、患者の吸気を対象とする換気量サポートのための吸気圧力をトリガする。その後、人工呼吸器は、瞬間位相が例えば50%などの特定の閾値を通過する際に、呼気圧力を供給するように循環する。
【0024】
本発明の他の態様は、サーボ制御された換気サポートを供給して、目標換気量を維持することに関するものである。供給される換気サポートの調整は、目標値と実際の測定値との間のエラーと、目標値からの実際の測定値の隔たりに伴って変化するゲインとに基づいている。あるいは、前記調整は、相対換気量エラー(換気量エラーを目標換気量で割ったものとして規定される)の関数であってもよい。この変化するゲインにより、患者換気量の穏やかな変化において換気サポート応答を抑制することができる一方で、更に激しい変化に対してより活発に応答することができる。簡単な形態において、階段関数は、目標値からの隔たりが閾値よりも小さい場合に低いゲインを与え、そうでない場合に高いゲインを与える。ゲインは、目標値に対して対称的にあるいは非対称的に変化されてもよい。非対称的に変化する実施形態において、ゲインは、患者の換気量が所望の換気量又は目標換気量を上回っているかあるいは下回っているかどうかに応じて異なって変化してもよい。これらの緩和されたあるいは段階的なゲイン調整により、装置は、測定換気量が目標値に近づく場合、すなわち、小さな目標値エラーが存在する場合よりも、測定換気量が目標値から更に遠ざかる場合、すなわち、大きな目標値エラーが存在する場合において、比較的大きなサポート圧増大(すなわち、更に積極的な応答)を行なうことができる。また、装置は、過換気においてはゲインに対してあまり積極的ではない変化をもたらし、過小換気においては更に積極的な変化をもたらすこともできる。
【0025】
本発明の別の態様において、換気量の制御は、肺胞換気量の測定値を制御することにより、更に正確に行なわれる。気道は死腔を有するため、患者によって吸込まれる空気の一部だけがガス交換に関与することができる。本発明においては、目標肺胞換気量の推定値として解剖学的及び/又は生理学的死腔の影響を差し引くことにより、全換気量が補正される。この肺胞換気量は、目標値として利用されるとともに、換気量サポートの供給中に行なわれた測定において同様に計算された実際の測定値と比較される。これらの2つの項の目標値エラーは、その後、人工呼吸器によって与えられる圧力サポートを調整するために適用される。
【0026】
本発明においては、所定期間にわたる呼吸気流量の関数と目標値との間の差分であるエラー信号が計算される。呼吸ガスは、サーボループを使用して、エラー信号の関数である圧力で、現在の呼吸サイクルの位相で、エラー信号の大きさに応じて変化するループゲインで、患者に対して供給される。ループゲインはエラー信号の大きさに伴って増大し、また、ゲインは、換気量目標値を上回るエラー信号においてよりも換気量目標値を下回るエラー信号において大きい。目標値は、患者の生理学的死腔を考慮に入れる肺胞換気量である。
【図面の簡単な説明】
【0027】
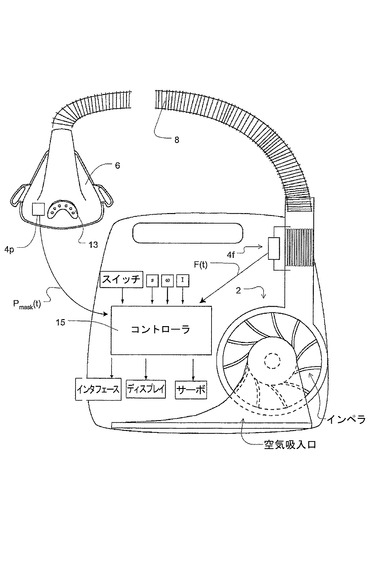
【図1】本発明の方法を実施するための好ましい人工呼吸器装置の構造を描いている。
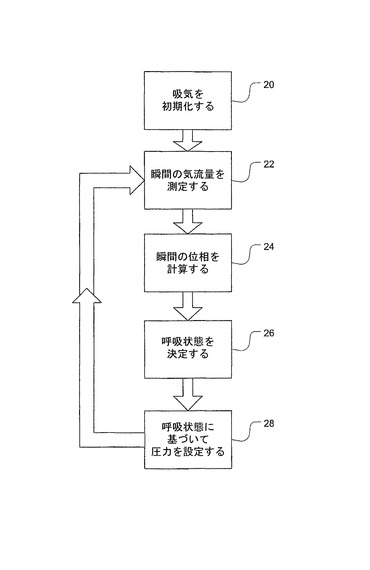
【図2】圧力を同期させて設定する際の一般的なステップのフローチャートである。
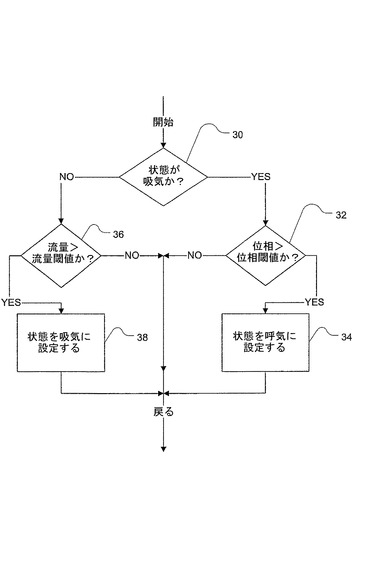
【図3】流量トリガする位相循環される機械同期を達成するためのステップを示すフローチャートである。
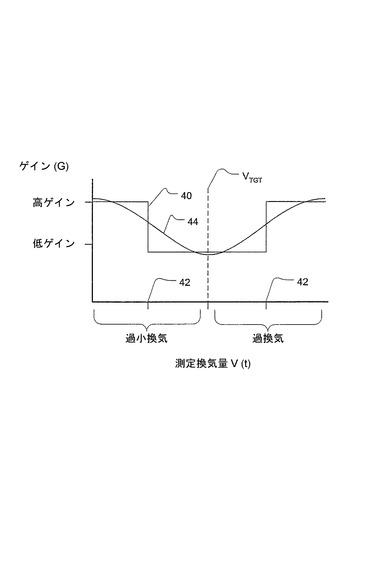
【図4】測定換気量が目標換気量から逸脱する隔たりの関数であるサーボ人工呼吸器ゲインを調整するための対称関数を図示する測定換気量V(t)対ゲインGのグラフである。
【図5】測定換気量が目標換気量から逸脱する隔たりの関数であるサーボ人工呼吸器ゲインを調整するための非対称関数を図示する相対換気量エラー対ゲインのグラフである。
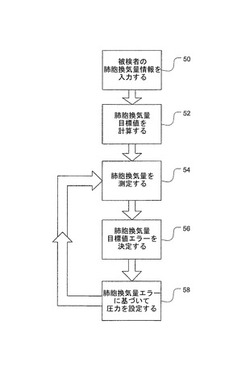
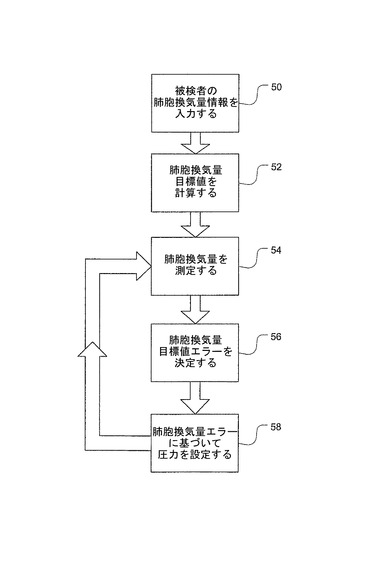
【図6】目標肺胞換気量にしたがった圧力供給におけるステップを示すフローチャートである。
【図7】1回換気量に応じて死腔を決定するための関数のグラフである。
【発明を実施するための形態】
【0028】
図1を参照すると、人工呼吸器は、ブロワ2の動作を管理するためのサーボ制御ループに依存している。装置は、流量センサ4fと、圧力センサ4pと、マスク6と、ブロワ2とマスク6とを接続するための空気供給管8とを含む。排ガスは排気管13を介して放出される。流量信号F(t)を得るために、呼吸気流計及び差圧トランスデューサを使用してマスク流量が測定されてもよい。あるいは、呼吸気流計は、ブロワからの流れと平行に並べられた小型チューブの束に取って代えられてもよい。この場合、チューブ束にわたって圧力差が差圧トランスデューサにより測定される。圧力信号Pmask(t)を得るために、圧力トランスデューサを使用して圧力タップでマスク圧力を測定することが好ましい。当業者であれば流量及び圧力の測定方法を理解しているため、図1には圧力センサ4f及び流量センサ4pだけが象徴的に示されている。圧力要求信号PRequest(t)を得るために、流量信号F(t)及び圧力信号Pmask(t)はコントローラ又はマイクロプロセッサ15へ送られる。本明細書で詳しく説明した制御方法を実施するため、コントローラ又はプロセッサは、集積チップ、メモリ及び/又は他の命令又はデータ記憶媒体を含んでいてもよい。前記制御方法を用いてプログラムされた命令は、装置のメモリ内の集積チップでコード化され、又は、ソフトウェアとしてロードされる。
【0029】
A.圧力供給同期 − トリガ及びサイクル
本発明の1つの態様は、患者人工呼吸器同期を伴っている。好ましい装置において、同期は、2つの異なる呼吸サイクル検出技術の独特の組み合わせによって行なわれ、これらの技術が互いに合わさって優れた同期が得られる。ここで説明するように流量に基づくトリガと合わせて位相に基づくサイクル(循環)を適用することにより制御される人工呼吸器は、機械同期の向上に関して相乗効果を有することが分かった。
【0030】
一般に、人工呼吸器は、患者吸気の検出時に高圧を供給するとともに、呼気の間に低圧を供給する。コントローラによって循環される供給圧力の1つの簡単な形態は以下の通りである。
【数2】
【0031】
上記圧力式により、一般に、2レベルの意味で、患者の呼吸サイクルの吸気部分及び呼気部分の間にわたって高圧及び低圧が得られるが、当業者は、高圧から低圧へあるいは低圧から高圧へのより快適な移行を行なうために圧力変化に傾斜をつけ、それにより、この傾斜がより自然な呼吸気流量サイクルをシミュレートするようにしてもよいことを認識している。
【0032】
高圧へトリガし且つ低圧へ循環させるための方法におけるステップが図2のフローチャートに示されている。ステップ20においては、機械の現在の状態が吸気へ初期化される。ステップ22では、瞬間の気流量が測定される。ステップ24においては、患者の瞬間の位相が計算される。ステップ26では、患者の呼吸状態を決定するために、機械の状態(吸気又は非吸気)の設定が気流量及び瞬間位相の評価に基づいている。ステップ28においては、検出された呼吸状態に基づいて圧力が調整される。これらのステップは、初期化ステップ20を除き、通常の呼吸サイクルに関連して非常に高い頻度で繰り返す。
【0033】
ステップ24及びステップ26に関して、当業者は、吸気の始まりを検出するのに適した適切な閾値及び瞬間流量の測定値を認識し、また、この測定値は、漏れの影響を軽減するために調整される。本発明は、瞬間位相の計算に関与しているため、米国特許出願第09/661,998号又は米国特許第6,532,957号に開示されるような連続位相変数を検討する。瞬間位相変数はファジー理論プロセスで計算される。
【0034】
より具体的には、装置は、呼吸気流量及び好ましくはその変化率を利用する。適切なメンバーシップ関数を使用して、ファジー集合のそれぞれにおける呼吸気流量信号のメンバーシップの度合い、すなわち、0、プラス、大きいプラス、マイナス、大きいマイナスが計算される。同様に、適切なメンバーシップ関数を使用して、ファジー集合のそれぞれにおける呼吸気流量信号の微分のメンバーシップの度合い、すなわち、安定、増加、高速増加、減少、高速減少が計算される。これらの集合におけるメンバーシップの度合いは、一群のファジー理論推論規則において使用される。各ファジー推論規則は呼吸の特定の位相に関連付けられる。多くの変形が可能であるが、好ましい実施形態においては、呼吸気流量に関連する推論規則が以下の通りである。
1.気流量が0で且つ高速増加である場合、位相は0回転。
2.気流量が大きいプラスで且つ安定である場合、位相は0.25回転。
3.気流量が0で且つ高速減少である場合、位相は0.5回転。
4.気流量が大きいマイナスで且つ安定である場合、位相は0.75回転。
5.気流量が0で且つ安定であり、呼吸気流量の5秒間ローパスフィルタ処理された絶対値が大きい場合、位相は0.9回転。
6.気流量がプラスで且つ位相が呼気である場合、位相は0.1回転。
7.気流量がマイナスで且つ位相が吸気である場合、位相は0.6回転。
8.呼吸気流量の5秒間ローパスフィルタ処理された絶対値が小さい場合、呼吸サイクルの位相は、患者の予期される呼吸数に等しい所定の割合で増大している。
9.呼吸気流量の5秒間ローパスフィルタ処理された絶対値が大きい場合、呼吸サイクルの位相は、20秒の時定数をもってローパスフィルタ処理された位相の既存の変化率に等しい安定した割合で増大している。
【0035】
ファジー推論規則を発展させて使用するための一般的な方法が米国特許出願第08/935,785号又は米国特許第6,532,957号に記載されている。一般に、吸気の開始点などの様々な特徴は、気流量−位相のグラフ上で特定され、また、それぞれの位相において、対応するファジー規則が発展される。例えば、「吸気の開始」点に適した規則は、「エフォート信号が小さく、エフォート信号の時間に関する2回微分が大きいプラス」であってもよい。メンバーシップ関数により、その規則は、吸気の開始時又はその近辺で最大限に起動される。好ましくは、最大起動の瞬間における正確な位相が実験的に決定されるべきである。この例において、最大起動は、吸気の開始の実際の瞬間の直後の位相、例えば0.05回転にあり、これは規則に関連する最良の位相である。特定されて規則及び位相が割り当てられる特徴が多ければ多いほど、これに伴う瞬間位相の決定がスムーズになる。無呼吸又は漏れの存在下において予期される呼吸数で位相が回転し続けるように更なる規則が与えられてもよい。サンプル規則8,9はこれらの目的をそれぞれ果たす。
【0036】
標準的なファジー推論方法を使用することにより起動の度合いG(n)を決定するために、ファジー推論規則の組み合わされた組の中のそれぞれの規則が評価される。例えば、規則2に関しては、規則の単位重み付けをとるそのような1つの方法により、(a)メンバーシップ関数「気流量が大きいプラス」における真理の度合いが0.6に評価し、(b)メンバーシップ関数「気流量信号が安定」における真理の度合いが0.4に評価するとともに、ファジー論理「AND」演算子が適用される場合、G(2)における起動の度合いは0.4となる。
【0037】
また、各ファジー推論規則は、特定の規則を特定の位相Φ(n)と関連付ける。例えば、先に示したように、規則2は、Φ(2)=0.25回転と関連付けられる。その後、各Φ(n)における起動の度合いG(n)を使用して、以下の式を使用するデファジー化ステップにおいて、瞬間の呼吸位相Φを表わす信号値が計算される。
Φ=arctan(Σ[G(n)sinΦ(n)],Σ[G(n)cosΦ(n)])
ここで、arctan関数は、その両方の引数が0であることが疑わしい場合に0の位相を与える4象限関数である。好ましい実施形態において、瞬間呼吸位相Φは0回転と1回転との間で連続な変数であり、この変数は、1つの呼吸サイクル(吸気の初めで開始し(0)、呼気の終わりで終了する(1))内の位置を比例的に表わしている。無論、当業者は、異なる数値範囲により瞬間呼吸位相を表わすことができることを認識している。
【0038】
前述したように、供給された圧力は、流量トリガされて位相循環される。機械状態のこの変化はステップ26において達成される。本発明を達成するための1つのアルゴリズムは以下の通りである。
(吸気が真であり)且つ(瞬間位相が瞬間位相閾値よりも大きい)場合には:
吸気を偽に設定し(すなわち、呼気が検出される)、
そうではなく、(吸気が偽であり)且つ(瞬間気流量が流量閾値よりも大きい)場合には:
吸気を真に設定する(吸気が検出される)。
【0039】
このようなアルゴリズムにおけるステップが、図3のフローチャートに図示されている。ステップ30において、機器は現在の呼吸状態を検査する。現在の状態が吸気である場合には、ステップ32において瞬間位相が位相閾値と比較される。好ましい実施形態において、位相閾値は、0.5回転であるが、それが1つの全体の呼吸サイクルに関連付けられたときには瞬間位相の数値範囲に応じて異なってもよい。吸気と呼気との間の切り換え点を表わす範囲の中央の数値が適している。ステップ32において、瞬間位相が閾値よりも大きい場合には、ステップ34が実行され、そうでない場合には、機械の状態の変化は生じない。ステップ34において、機械の状態は呼気に設定される。
【0040】
ステップ30において状態が吸気でない場合、ステップ36は瞬間の測定流量と気流量閾値とを比較する。流量が閾値よりも大きい場合、ステップ38において機械状態の変化が生じ、そうでない場合には変化が生じない。ステップ38においては、機械の状態が吸気に切り換えられる。
【0041】
このプロセスにおいては、機械が呼気レベルの圧力を供給している間に瞬間流量の測定値が流量閾値を超えると、機器が吸気の始まりを効果的に検出したため、機械は吸気圧力をトリガする。また、機械が吸気レベルの圧力を供給している間に、計算された瞬間位相が位相閾値を越えると、機器が呼気の始まりを効果的に検出したためあるいは呼気の始まりへ循環させる必要性を検出したため、機械は呼気圧力へ循環させる。
【0042】
B.換気量エラーと共に変化するコントローラゲイン
様々な呼吸努力及び患者状態の存在下で患者の適切な換気量を保証するため、目標換気量Vtarget及び実際の換気量Vactualに応じて、振幅Aの調整により、吸気中に供給される圧力P(t)が設定される。換気量Vactualのフィードバック測定値を用いて、目標換気量Vtargetを満たすようにサポートがサーボ制御される。供給圧サポート振幅Aの計算は以下の通りである。
【数3】
ここで、Eは、換気量エラーの測定値であり、例えば、以下のような絶対換気量エラー、
E(t)=Vtarget−Vactual(t)
又は、以下によって規定される相対換気量エラー
E(t)={Vtarget−Vactual(t)}/Vtarget
である。
【0043】
それは、明らかに、ある関数Hにおいて以下のようになる場合である。
G(E(t))・E(t)=H(E(t))
【0044】
この積分サーボコントローラにおいては、dA/dtが一般にEと共に増加するがその増加が因数G(E)によって変えられることを指し示すため、上記方程式はHではなくGに関して表わされる。
【0045】
一般に、Eが絶対換気量エラーである場合、積分サーボコントローラのゲインGは、0.1〜0.3cmH2O/(L/min)換気量エラー/秒の範囲の値が適している。しかしながら、目標近くで換気量レベルをサーボ制御する際には、目標を迅速且つ完全に満たすことが常に望ましいとは限らずあるいは常に必要であるとは限らない。例えば、患者が受ける適度な過小換気の特定の短い時期(すなわち、VactualがVtargetを下回る)においては、換気量不足に対する完全且つ迅速な補償応答を行なうことが望ましくない場合がある。より迅速なあるいは積極的な調整は、眠っている患者を目覚めさせる場合があり、さもなければ、機械の患者との同期に思わしくない影響を与える場合がある。そのような変化も患者にとってあまり快適ではない可能性がある。したがって、本発明の好ましい実施形態において、ゲインGは、換気量の測定値の目標値からの逸脱量に応じて変化する。これにより、目標値からの僅かな逸脱に関して供給換気量の変化の必要性が検出される場合に、エラーに対してゆっくりと応答することができる一方で、目標値からの大きな逸脱に関してより急速なエラーへの応答を行なうこともできる。すなわち、ゲインにより、患者は、大きく逸脱していなければ、積極的な応答を伴うことなく、自分の換気量を目標換気量近辺で変えることができる。しかし、換気量が目標から著しく外れている場合には、より積極的な応答がとられてもよい。同様に、患者が過剰換気される際にゲインによって換気量サポートを徐々に引き下げることができるように、ゲインは、患者の換気量が目標を上回っているかあるいは下回っているかどうかに応じて異なってもよい。これは、患者が元の換気量不足状態に陥らされそうになるために今しがた増大したサポートを急に取りやめることが望ましくないからであり、また、漏れが急速に変化し、この変化を漏れ補償システムが実質的に補償しなかったために換気量が目標を上回っていると思われるからである。
【0046】
換気量目標値からの換気量測定値の隔たりに応じてゲインを変えるために様々な方法が利用されてもよい。図4のグラフにおいて左右対称な階段関数40で図示される一実施形態において、ゲインGは閾値(T)42の関数である。閾値を上回る隔たりにおいては、エラー当たり高いゲイン(高ゲイン/エラー)が実施され、また、閾値を下回る隔たりにおいては、エラー当たり低いゲイン(低ゲイン/エラー)が実施される。例えば、以下のアルゴリズムはこの実施形態を達成できる。
d<Tの場合には、
G=低ゲイン/エラー
そうでない場合には、
G=高ゲイン/エラー
ここで、
dは目標値[Vactual−Vtarget]からの隔たりであり、
Tは隔たり閾値である。
【0047】
例えば、高ゲイン/エラーとして、エラー当たり0.3cmH2O/(L/min)の典型的なゲインサーボが利用されてもよく、また、高ゲイン/エラーの特定の一部分が低ゲイン/エラー(例えば0.2cmH2O)に適している。一実施形態においては、換気量測定値及び目標換気量が分時拍出量である場合、閾値は1.0リットル/分エラーである。
【0048】
関数44は、換気量目標値からの換気量測定値の隔たりに応じてゲインが変化する別の例である。この関数も、目標値近辺で左右対称であるが、ゲインの急な変化を示していない。また、先の実施形態で示した対称な応答とは異なり、患者の測定された換気量が換気量目標値を上回っているかあるいは下回っているかどうかに応じて異なるゲイン応答を許容するため、ゲイン調整が非対称に実施されてもよい。これらの原理を図5のグラフに示される好ましい関数によって図示する。当業者は、図5に図示されるように人工呼吸装置を用いて相対換気量エラーのグラフの関数を実施する方法を認識している。
【0049】
図5に示されるように、測定された換気量が目標から離れると、ゲインが次第に変化して、人工呼吸器の換気応答が増大する。しかしながら、目標の上下で異なるゲインを適用される。目標値を上回る呼吸気流量において、ゲインは、目標値を下回る対応する呼吸気流量におけるゲインよりも小さい。したがって、相対換気量エラーが0.5を超える過換気患者の場合、ゲインは、特定の中間ゲイン、例えば0.1cmH2O/(L/min)/秒を越えない。これは、より積極的な応答が重要ではないからである。同様に、患者が過換気状態にあることを明らかにするようにシステムにおける漏れが患者の換気量測定値を変化させるため、積極的な応答が正しくない場合がある。逆に、患者の過小換気量の度合いが著しい場合(例えば−0.3の相対換気量エラー)には、より積極的な応答が好ましいため、例えば0.3cmH2O/(L/min)/秒の高いゲインが利用される。好ましい実施形態において、換気量の測定値は最小量又は最小換気量であり、したがって、ゲイン調整は相対最小換気量エラーの関数である。
【0050】
エラーと共に変化するゲインが使用される場合、使用される換気量の測定値は好ましくは呼吸中に目に見えて変化してはならない。上記方程式で与えられる換気量の測定値、すなわち、呼吸気流量の絶対値の半分を使用すると、呼吸中の圧力サポートの変化は、吸気と呼気との間の移行部におけるゼロの換気量から、吸気及び呼気の流量のピーク時における目標換気量を大きく上回る換気量の値までの換気量範囲にわたるゲインと瞬間エラーとの積の積分である(換気量が目標値にあるときの一般的な呼吸を考える)。これは、一定のゲインと共に申し分なく働く。なぜなら、上記方程式の場合のように、積分の外側でゲインをとることができるからである。しかし、エラーと共に変化するゲインを用いると、呼吸中に実質的に変化する換気量のそのような測定値により、呼吸の一般的な換気量にとって望ましいゲインを与えることができない。その代わり、幅広い範囲の換気量のためのゲインが検討され、特に、呼吸流量がゼロを横切る度に、最大換気量エラーのためのゲインが適用される。そのため、呼吸流量の絶対値の半分をローパスフィルタ処理して、ゲインを決定する前に換気量及び換気量エラーを計算することが必要である。このローパスフィルタリングの欠点は、換気量変化に対する応答の遅れである。
【0051】
多くの時間にわたって十分にフィルタ処理された測定値を使用するが重度の過小換気に対して素早く応答できる1つの方法は、異なる応答速度を持つ換気量の2つの測定値を使用することである。呼吸中に若干変動する急速に応答する換気量の測定値(「高速換気量」)は、それが適度に目標値を下回っていなければ圧力サポートに影響を及ぼさない。この点から、高速換気量が更に減少すると、圧力サポートの計算においては、高速換気量が圧力サポートの唯一の決定子となる1つの点に達するまで、更にゆっくりと応答する測定値(「低速換気量」)が次第に重要でなくなるとともに、高速換気量が次第に重要になってくる。
【0052】
特に、低速及び高速相対換気量エラーEs及びEfをそれぞれ使用する一実施形態は、圧力サポート振幅Aの変化率に関する以下の方程式を使用する。
【数4】
【0053】
適切なゲイン値はGf=0.7及びGs=0.5cmH2O/秒(前述した圧力サポート振幅Aは、dA/dtを積分することにより決定することができる。)である。
【0054】
C.肺胞換気量目標値
本発明の他の態様は、患者の呼吸器系における実際のガス交換に正確に対応する換気量目標値を維持するための人工呼吸器の制御を伴っている。この態様は、肺胞換気量の測定のサーボ制御を含む。これまで説明した装置は、単純な分時拍出量を目標換気量として利用してもよいが、本発明のこの態様では、好ましい目標換気量VTGTが肺胞換気量である。
【0055】
図6は、肺胞換気量を維持するために圧力をサーボ制御する方法のステップを定めている。入力ステップ50において、ユーザは、患者における肺胞排気量目標値の計算を支援するために必要な患者の特定の情報を入力するように促される。ステップ52においては、肺胞換気量目標値が計算される。ステップ54においては、肺胞換気量の測定が行なわれる。ステップ56では、肺胞排気量目標値エラーを得るために測定値と目標値とが比較される。ステップ58では、肺胞排気量目標値エラーに基づいて圧力が調整される。
【0056】
このような換気量測定を装置が制御できるようにするには、患者の生理学的死腔VD(肺胞+解剖学的死腔)の推定値が必要とされる。簡単な実施形態においては、肺胞換気量の制御前に、前述したようにステップ50においてユーザは推定値を装置に入力するように促されてもよい。したがって、ユーザは、患者の前の解析から決定された死腔容積VD及び肺胞容積VAを入力してもよい。VDは、死腔を解析するための任意の既知の方法によって、例えばファウラーの方法又はボーアの方法を使用することによって決定されてもよい。死腔容積を決定するためのファウラー方法及びボーア方法についは、Respiratory Physiology − the essentials 5th ed., Baltimore MD, Williams & Wilkins, 1995においてJohn B. Westにより説明されている。あるいは、VDは、所定の量であってもよく、あるいは、他の情報が入力されないあるいは計算されない場合には既定量、例えば150mlであってもよい。
【0057】
あるいは、装置は、患者のサイズに関する質問へのユーザ応答に基づくテーブルから解剖学的死腔容積を推定してもよい。例えば、使用前、装置は、身長、年齢、性別に関してユーザに入力を促してもよい。この情報を用いて、装置は、このような情報がそのようなユーザのための理想的な体重に関連付けられている1つ又は複数のテーブルにアクセスしてもよい。そのような患者の決定された理想的な体重を用いて、理想的な体重の1kg毎に2mlの解剖学的死腔容積を許容することにより、解剖学的死腔が推定されてもよい。当業者であれば認識しているように、テーブルは、前述した1対1の近似に基づく体重ではなく、年齢、身長、性別に基づく解剖学的死腔を含んでいてもよい。年齢、身長、性別に基づく患者のための理想的な体重は、当分野において既知である。一実施形態において、装置は、実際の体重及び解剖学的死腔容積に関してユーザに入力を促してもよく、あるいは、これらから前述した式に基づいて概算されてもよい。また、この体重は、患者の肥満度に基づいて、例えば肥満度指数(BMI)又は皮膚のひだの厚さの入力によって調整されてもよい。当業者は、テーブル又は他の式又は計算を利用することにより患者のサイズから解剖学的死腔容積を概算するための様々な方法を認識している。一実施形態において、解剖学的死腔の前記体重関連の推定値は、VDとして、又は、肺胞及び解剖学的死腔の両方に関する推定値として見なされてもよい。あるいは、肺胞死腔のための別個の推定がなされてもよく、また、そのような推定が解剖学的死腔と組み合わされてもよい。したがって、装置の更なるプロンプティングは、全死腔容積VD(すなわち、生理学的死腔[VD=VALD+VAND])の推定値として役立つように、解剖学的死腔VANDと組み合わされる肺胞死腔VALDの推定値を与えてもよい。
【0058】
本発明の一実施形態において、死腔VDは、VD=F(VT)のように、治療の準備中に測定される患者の予期される1回換気量又は最近計算された1回換気量の関数であるように解釈されてもよい。そのような実施形態において、関数は、安静時の正常な患者における1回換気量の約0.2〜0.35の範囲の所定のパーセント、又は、大体30%すなわち約1/3であってもよく、安静時に慢性閉塞性肺疾患等の肺病を持っている患者に関してはこれよりも更に高くてもよい。肺病をもっている特定の患者が正常な患者よりも大きい度合いの死腔を有する場合には、一実施形態において、装置は、患者が肺病又はCOPD(例えば気腫又は慢性細気管支炎)を持っているかどうかを決定するためにユーザから入力を促してもよい。所定のパーセントは、そのような患者における範囲の高い方の端の値に設定されてもよく、あるいは、応答が否定的である場合には範囲の下端に設定される。あるいは、VDを得るために1回換気量に基づくアフィン関数が利用されてもよく、また、場合によっては、このアフィン関数は、装置によって促された患者の病状に依存していてもよい。例えば、図7に図示されるように、アフィン関数60は、死腔を決定するために1回換気量の関数として利用されてもよい。場合によっては、患者がCOPD又は任意のそのような特定の病気を患っているかどうかに応じて異なる関数が選択されてもよい。したがって、図7に図示されるように、患者の病気又は肺胞死腔(VALD)に関連付けられた特定の容積オフセット62が、1回換気量の患者の関数に対して適用されてもよい。本発明の更に他の実施形態において、VDは、動脈分圧二酸化炭素PCO2又はマスク内の呼気CO2を測定するために電子的に組み込まれたモニタを使用することにより推定されてもよい。CO2データは、ボーアの方程式にしたがって学習期間中に肺胞換気量目標値を得るために利用され、その後、目標肺胞換気量に等しいサポートをサーボ制御するために使用されてもよい。
【0059】
前述したように、好ましい目標値Vtargetは肺胞分時拍出量である。図6の計算ステップ52中において、装置は、肺胞分時拍出量目標値を計算するように構成されあるいは肺胞分時拍出量目標値を計算するように以下の式をもってプログラムされてもよい。
肺胞分時拍出量(Valveolar−minute)=VA×R
ここで、
VAは、肺胞容積(VA=VT−VD)であり、
VTは、患者の予期される1回換気量であり、
VDは、患者の死腔容積であり、
Rは、患者の予期される呼吸数(呼吸/分)である。
あるいは、目標値は、この計算されたValveolar−minuteの関数として設定されてもよい。例えば、目標値は、この計算されたValveolar−minuteの95%に設定されてもよい。
【0060】
この決定で利用される期待値のため、ステップ50において、装置は、患者の予期される1回換気量VT及び予期される呼吸数Rの入力を促してもよい。しかしながら、そのような患者固有の情報は、アウェイク学習期間(awake learning period)中に装置により測定されてもよく、または、先に特性された情報の一部の入力に基づいて計算されてもよい。例えば、呼吸数は、アウェイク学習期間の少なくとも75%にわたるメジアン呼吸数として解釈されてもよい。場合によっては、目標値計算が呼吸数などのアウェイク学習期間から得られた測定値に基づいている場合には、参照としてその開示内容が本明細書に組み込まれる同一出願人による米国特許第6,644,312号に記載されているように、睡眠に関連付けられた呼吸の違いを考慮するべく目標肺胞分時拍出量の計算が調整されてもよい。
【0061】
学習期間の一部の間にわたる平均肺胞換気量は以下のように計算することができる。各呼吸のそれぞれにおいて1回換気量VTが存在し、また、時間Tにわたって呼吸がN個存在し且つ肺胞1回換気量が関数a(VT)により1回換気量の関数として与えられる場合には、平均肺胞換気量が以下によって与えられる。
【数5】
しかし、異常値及びアーティファクトを拒絶するために望ましいメジアン肺胞換気量が必要とされる場合、呼吸的なメジアンは不適当である。なぜなら、呼吸的メジアンは、長い呼吸に対する重みと同じ重みを短い呼吸(一般的には1回換気量が少ない)に対して与え、そのため、一般的に、例えば平均換気量に対して対称な時間に関する肺胞換気量の分配など、平均換気量と同じ結果を与えなければならない場合にそのような結果を与えないからである。これは望ましくない。時間的なメジアンが更に望ましい。数学的には、各呼吸の時間に対してその呼吸中に肺胞換気量(肺胞容積を呼吸持続時間で割ったもの)を割り当てることにより、区分的に一定の時間の関数が構成され、それにより、この関数のメジアンが計算される。実際には、これに対する近似値は、肺胞換気量のヒストグラムを形成することによって効率的に計算することができる。それぞれの呼吸毎に肺胞換気量が計算され、また、ヒストグラムにおける対応する入力が、呼吸の持続時間に比例する大きさだけインクリメントされる。その後、通常の方法でヒストグラムのメジアンが計算される。
【0062】
ステップ54において患者が体験した実際の供給肺胞換気量Vactualの測定値は、1回換気量VT及び呼吸数が好ましくは患者からの呼吸気流量の測定値から連続的に決定された最近の測定値であるという点を除き、目標値計算と同じ式に基づいている。例えば、呼吸数は、前の1分間にわたって患者がとった最近の平均呼吸数すなわち呼吸の数である。1回換気量は、前の呼吸からの量又は前の1分間にわたってとられた呼吸からの平均の量である。また、1回換気量は、分時換気量の測定値を呼吸頻度で割る(Vmin/fresp)ことによって決定されてもよい。好ましくは、分平均を達成するように時定数が選択された4次ローパスベッセルフィルタを用いて呼吸気流量の絶対値の半分をフィルタ処理することにより、分時換気量を得ることができる。入力される患者の死腔容積VDは、一定に保たれてもよく、あるいは、前述したように1回換気量に応じて変化してもよい。
【0063】
あるいは、実際の供給肺胞換気量Valveolar(又は、期待値に基づく目標値)は、以下の式にしたがって計算されてもよい。
【数6】
ここで、
Vtotalは、用途に適した応答を与えるように選択されたコーナー周波数をもってローパスフィルタ処理された(制御に関しては、振動を避けるためにサーボ制御応答よりも著しく速い;目標値決定に関しては、可能性としてかなり遅い)、呼吸気流量の絶対値の半分などの気流量から得られる換気量である。
VDは、前述した方法のうちの任意の1つによって決定された死腔容積であり、
frespは、前述したように瞬間位相変数の1分当たりの回転数として計算されてもよい呼吸頻度(1分当たりの呼吸)である。
【0064】
肺胞換気量を計算する好ましい方法は以下の通りである。
【0065】
FRC(機能残気量、呼気の最わりの肺容量)を超えて吸い込まれる量Vの関数として供給される肺胞容積がU(V)によって与えられるとする。その後、吸気及び呼気の両方の最中にわたって以下の値がローパスフィルタに対して入力され、ローパスフィルタの出力が肺胞換気量の測定値となる。
【数7】
ここで、Qは時間の関数としての呼吸流量であり、プライム(’)記号は微分を示しており、t0はつい最近の吸気又は呼気の開始時間である。
【0066】
直感的に、呼吸流量の絶対値の半分には、容積に関連して、肺胞容積が増大する比率が掛け合わされる。計算された肺胞換気量から解剖学的死腔VDAのみを排除する特定の場合において、これは、つい最近の吸気又は呼気の開始後に容積を計算することに相当し、また、この容積が死腔よりも小さい場合にはローパスフィルタへの入力をゼロにすることに相当し、また、さもなければ、呼吸流量の絶対値の半分に等しい入力を行なうことに相当する。その理由は、ここでは、本発明者らが以下の式を持っているからである。
【数8】
【0067】
換気量の計算において、吸気流量又は呼気流量のいずれか1つだけを使用するのではなく、吸気流量及び呼気流量の両方を使用する利点としては、流量のベースラインエラーに対する感度の低下、よりスムーズなフィルタ出力を挙げることができる。
【0068】
実際の肺胞換気量及び目標肺胞換気量が決定されると、例えば以下のようにエラーに基づいて供給圧サポート振幅Aを調整することができる。
【数9】
【0069】
その後、前述した振幅Aにしたがって供給圧が設定される。
【0070】
D.漏れが急速に変化する際の圧力サポート調整の減少
漏れの急速な変化により、呼吸流量ベースラインが一時的に不正確となり、それにより、殆どの場合、計算された換気量が実際の換気量よりも高くなるという影響を受け、その結果、圧力サポートは、不適切に減少し、あるいは、通常の速度よりもゆっくりと増大する。
【0071】
前述したBerthon−Jonesによる特許第6,532,957号は、「ジャミング」と呼ばれるファジー量を使用することによりこの影響を低減する1つの方法について記載している。
【0072】
本発明においては、この影響を減らすため、漏れが急速に変化している程度の異なるファジー指標R(0≦R≦1)を使用して、先に計算された圧力サポート振幅の調整の割合dA/dtに(1−R)を掛け合わせることにより、圧力サポート調整の割合を減らしている。Rを計算するため、ピーク保持傾向を有するローパスフィルタを用いて推定呼吸流量が処理され、それにより、典型的に漏れ推定値が応答するよりも急速に応答することから漏れ推定値が正しくないことを警告する残留漏れ(補償されない漏れとして規定される)の推定値Lが生成されるが、この推定値は、それ単独で急速に変動するため、呼吸流量の計算のために漏れ推定値として直接に役に立たない。Lの絶対値が小さい(例えば、目標換気量よりも小さい)と、Rは0となり、また、Lの絶対値が大きい(例えば、目標換気量の2倍)と、Rは1となり、これらの間でRが直線的に補間される。
【0073】
Lを生成するフィルタの実施は以下の通りである。第1の段階は、3.2/60Hzのコーナー周波数を有する4極ベッセルローパスフィルタである。第2の段階は、瞬時立ち上がりの可変時定数1次ローパス立下りフィルタである。この場合、「立ち上がり」とは、前回の出力のゼロから離れる方向での増大を意味しており、そのため、例えば、出力の前の値がマイナスであった場合、「立ち上がり」は、更にマイナスになることを意味している。「立下り」とは、ゼロへ向かう移動を意味している。時定数は、流量がゼロから遠くなると長くなる。目標換気量(同じ流量単位において両方)に対してフィルタ処理された呼吸流量(第1の段階の出力)が以下によって与えられるとする。
QR=Qrespiratory, filtered/Vtarget
【0074】
このとき、毎秒1の単位の立下り速度定数(立下り時定数の逆数)は、以下によって与えられる。
1/0.5 QR≦0.75のとき
1/5 QR≧2のとき
α/5+(1−α)/0.5 上記以外のとき
ここで、α=(QR−0.75)/1.25
【0075】
第2の段階の目的は、ゼロから更に離れる第1の段階の出力の値の近くに第2の段階の出力を維持させることである(典型的に、第1の段階の出力は、一見して正弦波+ゆっくりと変化する「DC」値のようである)。
【0076】
残留漏れを補償するこの方法は、通常よりも十分に長いはっきりとした吸気期間又は呼気期間を生じる(一般に、これらの長い期間を生じさせるためには、例えば漏れが突然に増大する場合に呼気の全体にわたってあるいは殆どの呼気中に推定呼吸流量をプラスにするのに十分大きいベースラインシフトが必要である)ほど十分に大きくない残留漏れを検出できるという点で、Berthon−Jones特許第6,532,957号に記載された「ジャミング」を超える利点を有する。
【0077】
この全開示内容に記載された様々な実施形態を参照して本発明を説明してきたが、これらの実施形態が本発明の様々な原理の適用の単なる例示であることは言うまでもない。本明細書で説明した本発明の例示的な実施形態に加えて、多数の変更がなされてもよく、また、本発明の思想及び範囲から逸脱することなく他の構成が考え出されてもよい。
【0078】
[関連出願]
本出願は、2003年11月26日に出願された米国仮出願第60/525,219号の利益を主張する。
【技術分野】
【0001】
本発明は、患者の呼吸サイクルと同期し且つ呼吸不全の存在下で最小限の十分なレベルのサポートを行なうように制御される、換気支援を行なうための方法及び装置に関する。
【背景技術】
【0002】
呼吸不全は、ガス交換に悪影響を及ぼして酸素の動脈分圧を低下させるとともに二酸化炭素の動脈分圧を高める呼吸器系の異常である。呼吸不全は、正常な肺、肺異常、又は、これらの組み合わせの存在下での換気量の減少に起因している。
【0003】
呼吸不全は、一般に、呼吸器の働きの低下や体位因子を含む様々な理由により、睡眠中におけるガス交換の悪化をもたらす。REM睡眠段階中における随意筋機能の低下により、特定の患者における呼吸の副筋の重要性に応じて、この睡眠段階中に呼吸機能が著しく悪化する場合がある。
【0004】
睡眠は、閉塞型睡眠時無呼吸症候群(OSA)と称される様々な度合いの上気道閉塞に関連付けられる場合がある。
【0005】
睡眠呼吸障害(SDB)は、一般に、睡眠中に生じるある種の呼吸中断のことである。睡眠呼吸障害の最も一般的な形態が閉塞型睡眠時無呼吸症候群(OSA)である。大きい断続的ないびき、無呼吸、呼吸低下はOSAを特徴付ける。
【0006】
呼吸不全及びOSAは、胸壁、神経筋、筋萎縮性側索硬化症(ALS)、あるいは、慢性閉塞性肺疾患(COPD)などの肺病を持つ患者が直面する状態と関連して発現する。睡眠時無呼吸の症状は先駆物質の結果として現れるため、SDBは、睡眠中に無呼吸及び/又は呼吸低下を呈する任意の病的状態を説明するために使用される一般的な用語になってきた。無呼吸及び呼吸低下は、ガス交換や断片睡眠を妨げ、しばしば酸素脱飽和を引き起こす。重症の場合、患者は、、毎晩何百回もこれらの酸素脱飽和に直面して睡眠から目覚める場合がある。
【0007】
OSAの最も一般的な治療は、持続的気道陽圧法(CPAP)を行なうことである。CPAPは、Sullivanによって発明され、米国特許第4,944,310号において教示されている。簡単に述べると、CPAP治療は、通常4〜20cmH2Oの範囲で陽圧を与えることにより気道の空気スプリント(pneumatic splint)としての機能を果たす。空気(エアー)はモータ駆動のブロワによって気道へ供給され、ブロワの出口は、空気供給ホースにより、患者の顔に密着する鼻(鼻及び/又は口)マスクに対して結合されている。マスクに近い供給チューブには排気ポートが設けられている。
【0008】
換気支援は、2レベル(bi−level)人工呼吸器、比例支援(proportional assist)人工呼吸器、サーボ制御人工呼吸器によって行なわれてもよい。各タイプの人工呼吸器は、患者の呼吸を支援するための異なる方法を利用して、異なる目的を達成する。
【0009】
そのような人工呼吸装置は、患者の変化する状態に対して適切な応答を行なう。例えば、人工呼吸装置は、吸気及び呼気サポートに関連付けられた様々な圧力レベルをトリガして循環させるべき時期を決定し、それにより、患者の呼吸サイクルと同期する。トリガは、患者の吸気を対象とする圧力レベルの開始に関連付けられる事象である。循環は、患者の呼気を対象とする圧力レベルへの切り換えに関連付けられる事象である。また、装置は、過小換気又は過換気のそれぞれの期間中に換気量を増大させあるいは減少させるための何らかの方法を提供してもよい。これらの部分の一方又は両方において機械性能を最大にすると、患者の快適さが高まり、呼吸不全の治療が良好になる。
【0010】
単純な2レベル人工呼吸器は、患者の呼吸サイクルの吸気部分いわゆるIPAPの間にわたって高圧を供給するとともに、患者の呼吸サイクルの呼気部分いわゆるEPAPの間にわたって低圧を供給する。伝統的には、切り換えは、呼吸流量又は圧力を監視するとともに閾値レベルを規定することにより行なうことができる。測定値が閾値を越えると、装置はIPAP圧力をトリガする。測定値が閾値を下回ると、装置はEPAP圧力へ循環させる。そのような切り換えに代わる他の方法は、呼吸速度の記録、吸気又は呼気のいずれかの開始からの経過時間の監視を伴っている。機械は、呼吸サイクルの前の部分における期待時間に達した後、呼吸サイクルの後の部分、すなわち、吸気又は呼気のいずれかに切り換わってもよい。
【0011】
ResMed社によって開発された異なるサーボ人工呼吸装置は、計算された瞬間位相に基づいてスムーズな循環圧変化を与えることにより同期を行なう。装置の実施形態は、同一出願人による米国特許出願第09/661,998号及び米国特許第6,532,957号,第6,532,959号の主題であり、その開示内容は参照として本明細書に組み込まれる。一般に、装置は、以下のように、患者の気道抵抗Rの一部分(この一部分は、ゼロから実質的な値までの範囲にわたっているが、1未満である)、呼吸気流量f(t)、振幅A、圧力波形テンプレートΠ(Φ)に適用される患者の瞬間呼吸位相Φの推定値に基づいて、瞬間マスク圧力P(t)を供給する。
【数1】
【0012】
この種の人工呼吸器において、V(t)は、例えば、呼吸気流量f(t)の絶対値の半分であってもよい。換気量目標値VTGTは、気流量の測定量のパーセンテージ、例えば平均分時拍出量の95%又は予め設定された所定の分時拍出量であってもよい。Gは、積分サーボコントローラのゲインであり、0.1〜0.3cmH2O/(L/min)換気量エラー/秒の範囲の値が適している。AMIN及びAMAXは、快適及び安全のためにサポートAの度合いに関して設定された限界値である。一般的には、0.0及び20.0cmH2Oの限界値がそれぞれ適している。
【0013】
患者の呼吸位相を検出する際、装置は、呼吸の特定の位相に関連付けられたファジー理論規則の組のための入力データとして、呼吸気流量信号及びその微分を使用する。規則の評価結果を使用することにより、1つの連続的な位相変数が得られ、この位相変数は瞬間呼吸位相として使用される。圧力波形テンプレートに適用されるこの位相値は、その後、現実的で快適な呼吸サイクルを生成する態様で、供給された圧力を比例的に変化させる。同時に、目標換気量VTGTに基づくAの計算により、所望レベルの換気量が保証される。
【0014】
同期の問題に関しては、患者の呼吸サイクルを検出する際に連続的な瞬間位相を決定することが有益であるが、簡単な関数Π(Φ)を使用せずに患者に対して供給される圧力を決定する方法を使用して、前記方程式のAに掛け合わされる数を決定することが望ましい場合もある。また、吸気圧の開始をトリガするための代替の方法を利用することが有益である可能性がある。
【0015】
変化する患者呼吸要求に対する圧力応答の制御に関しては、前記方程式において、圧力サポートの変化率が、目標換気量と実際の換気量との間の差に単純に比例する。小さいエラーにおいては応答が穏やかになり、特に著しい過小換気においては応答が更に活発になることが望ましい可能性がある。これは、結果として著しい低酸素症を招く可能性が高いからである。これに対し、測定換気量が目標を大きく上回っている場合には、特に非侵襲的換気システムで突然に漏れの変化が生じた際に漏れ評価システムが漏れの変化を実質的に補償するまで測定換気量がほぼ必ず実際の換気量よりも多くなることを考えると、換気サポートレベルを活発に減少させる必要はなくあるいはそのようにすることが望ましくない。
【0016】
目標全換気量(従来から「分時換気量」と呼ばれている)における人工呼吸器に伴う問題は、全換気量が、患者の実際の要求を満たす程度の正確な指標を与えない場合があるということである。そのような指標は、患者が解剖学的及び生理学的な死腔を有するという事実及び死腔が患者間で異なっているという事実を明らかにしない。特に、特定の全換気量において、高い呼吸数及び低い1回換気量は、低い呼吸数及び高い1回換気量よりも低い肺胞換気量を与える。したがって、分時換気量をサーボ制御する装置は、高い呼吸数で不十分な肺胞換気量を与える虞がある。
【発明の概要】
【発明が解決しようとする課題】
【0017】
本発明の目的は、患者の呼吸サイクルと同期して吸気中に高レベルの圧力サポートを行なうとともに呼気中に低レベルの圧力サポートを行なう人工呼吸器を提供することである。
【0018】
本発明の更なる目的は、流量トリガされるが位相循環されるそのような同期人工呼吸器を提供することである。
【0019】
本発明の更に他の目的は、少なくとも目標換気量を維持するとともに、エラーに対してリニアとならず且つゼロエラーに対して対称とならないように換気量のエラーに応答する人工呼吸器を提供することにある。
【0020】
本発明の他の目的は、異なる速度で応答する2つの測定値を使用することにより、圧力サポートの両方のスムーズな変化を可能にするとともに、ゲインがエラーの関数であり、それでも、著しい過小換気に対して急速に応答する人工呼吸器を提供することである。
【0021】
本発明の他の目的は、肺胞換気量をサーボ制御する人工呼吸器を提供することである。
【0022】
本発明の以下の説明を考慮すれば、更なる目的は当業者にとって明らかである。
【課題を解決するための手段】
【0023】
本発明の1つの態様は、患者人工呼吸器同期を伴っている。本発明においては流量が測定される。流量の測定値を用いると、ファジー理論方法により瞬間呼吸位相変数が決定される。その後、人工呼吸器は、測定流量が閾値を越えると、患者の吸気を対象とする換気量サポートのための吸気圧力をトリガする。その後、人工呼吸器は、瞬間位相が例えば50%などの特定の閾値を通過する際に、呼気圧力を供給するように循環する。
【0024】
本発明の他の態様は、サーボ制御された換気サポートを供給して、目標換気量を維持することに関するものである。供給される換気サポートの調整は、目標値と実際の測定値との間のエラーと、目標値からの実際の測定値の隔たりに伴って変化するゲインとに基づいている。あるいは、前記調整は、相対換気量エラー(換気量エラーを目標換気量で割ったものとして規定される)の関数であってもよい。この変化するゲインにより、患者換気量の穏やかな変化において換気サポート応答を抑制することができる一方で、更に激しい変化に対してより活発に応答することができる。簡単な形態において、階段関数は、目標値からの隔たりが閾値よりも小さい場合に低いゲインを与え、そうでない場合に高いゲインを与える。ゲインは、目標値に対して対称的にあるいは非対称的に変化されてもよい。非対称的に変化する実施形態において、ゲインは、患者の換気量が所望の換気量又は目標換気量を上回っているかあるいは下回っているかどうかに応じて異なって変化してもよい。これらの緩和されたあるいは段階的なゲイン調整により、装置は、測定換気量が目標値に近づく場合、すなわち、小さな目標値エラーが存在する場合よりも、測定換気量が目標値から更に遠ざかる場合、すなわち、大きな目標値エラーが存在する場合において、比較的大きなサポート圧増大(すなわち、更に積極的な応答)を行なうことができる。また、装置は、過換気においてはゲインに対してあまり積極的ではない変化をもたらし、過小換気においては更に積極的な変化をもたらすこともできる。
【0025】
本発明の別の態様において、換気量の制御は、肺胞換気量の測定値を制御することにより、更に正確に行なわれる。気道は死腔を有するため、患者によって吸込まれる空気の一部だけがガス交換に関与することができる。本発明においては、目標肺胞換気量の推定値として解剖学的及び/又は生理学的死腔の影響を差し引くことにより、全換気量が補正される。この肺胞換気量は、目標値として利用されるとともに、換気量サポートの供給中に行なわれた測定において同様に計算された実際の測定値と比較される。これらの2つの項の目標値エラーは、その後、人工呼吸器によって与えられる圧力サポートを調整するために適用される。
【0026】
本発明においては、所定期間にわたる呼吸気流量の関数と目標値との間の差分であるエラー信号が計算される。呼吸ガスは、サーボループを使用して、エラー信号の関数である圧力で、現在の呼吸サイクルの位相で、エラー信号の大きさに応じて変化するループゲインで、患者に対して供給される。ループゲインはエラー信号の大きさに伴って増大し、また、ゲインは、換気量目標値を上回るエラー信号においてよりも換気量目標値を下回るエラー信号において大きい。目標値は、患者の生理学的死腔を考慮に入れる肺胞換気量である。
【図面の簡単な説明】
【0027】
【図1】本発明の方法を実施するための好ましい人工呼吸器装置の構造を描いている。
【図2】圧力を同期させて設定する際の一般的なステップのフローチャートである。
【図3】流量トリガする位相循環される機械同期を達成するためのステップを示すフローチャートである。
【図4】測定換気量が目標換気量から逸脱する隔たりの関数であるサーボ人工呼吸器ゲインを調整するための対称関数を図示する測定換気量V(t)対ゲインGのグラフである。
【図5】測定換気量が目標換気量から逸脱する隔たりの関数であるサーボ人工呼吸器ゲインを調整するための非対称関数を図示する相対換気量エラー対ゲインのグラフである。
【図6】目標肺胞換気量にしたがった圧力供給におけるステップを示すフローチャートである。
【図7】1回換気量に応じて死腔を決定するための関数のグラフである。
【発明を実施するための形態】
【0028】
図1を参照すると、人工呼吸器は、ブロワ2の動作を管理するためのサーボ制御ループに依存している。装置は、流量センサ4fと、圧力センサ4pと、マスク6と、ブロワ2とマスク6とを接続するための空気供給管8とを含む。排ガスは排気管13を介して放出される。流量信号F(t)を得るために、呼吸気流計及び差圧トランスデューサを使用してマスク流量が測定されてもよい。あるいは、呼吸気流計は、ブロワからの流れと平行に並べられた小型チューブの束に取って代えられてもよい。この場合、チューブ束にわたって圧力差が差圧トランスデューサにより測定される。圧力信号Pmask(t)を得るために、圧力トランスデューサを使用して圧力タップでマスク圧力を測定することが好ましい。当業者であれば流量及び圧力の測定方法を理解しているため、図1には圧力センサ4f及び流量センサ4pだけが象徴的に示されている。圧力要求信号PRequest(t)を得るために、流量信号F(t)及び圧力信号Pmask(t)はコントローラ又はマイクロプロセッサ15へ送られる。本明細書で詳しく説明した制御方法を実施するため、コントローラ又はプロセッサは、集積チップ、メモリ及び/又は他の命令又はデータ記憶媒体を含んでいてもよい。前記制御方法を用いてプログラムされた命令は、装置のメモリ内の集積チップでコード化され、又は、ソフトウェアとしてロードされる。
【0029】
A.圧力供給同期 − トリガ及びサイクル
本発明の1つの態様は、患者人工呼吸器同期を伴っている。好ましい装置において、同期は、2つの異なる呼吸サイクル検出技術の独特の組み合わせによって行なわれ、これらの技術が互いに合わさって優れた同期が得られる。ここで説明するように流量に基づくトリガと合わせて位相に基づくサイクル(循環)を適用することにより制御される人工呼吸器は、機械同期の向上に関して相乗効果を有することが分かった。
【0030】
一般に、人工呼吸器は、患者吸気の検出時に高圧を供給するとともに、呼気の間に低圧を供給する。コントローラによって循環される供給圧力の1つの簡単な形態は以下の通りである。
【数2】
【0031】
上記圧力式により、一般に、2レベルの意味で、患者の呼吸サイクルの吸気部分及び呼気部分の間にわたって高圧及び低圧が得られるが、当業者は、高圧から低圧へあるいは低圧から高圧へのより快適な移行を行なうために圧力変化に傾斜をつけ、それにより、この傾斜がより自然な呼吸気流量サイクルをシミュレートするようにしてもよいことを認識している。
【0032】
高圧へトリガし且つ低圧へ循環させるための方法におけるステップが図2のフローチャートに示されている。ステップ20においては、機械の現在の状態が吸気へ初期化される。ステップ22では、瞬間の気流量が測定される。ステップ24においては、患者の瞬間の位相が計算される。ステップ26では、患者の呼吸状態を決定するために、機械の状態(吸気又は非吸気)の設定が気流量及び瞬間位相の評価に基づいている。ステップ28においては、検出された呼吸状態に基づいて圧力が調整される。これらのステップは、初期化ステップ20を除き、通常の呼吸サイクルに関連して非常に高い頻度で繰り返す。
【0033】
ステップ24及びステップ26に関して、当業者は、吸気の始まりを検出するのに適した適切な閾値及び瞬間流量の測定値を認識し、また、この測定値は、漏れの影響を軽減するために調整される。本発明は、瞬間位相の計算に関与しているため、米国特許出願第09/661,998号又は米国特許第6,532,957号に開示されるような連続位相変数を検討する。瞬間位相変数はファジー理論プロセスで計算される。
【0034】
より具体的には、装置は、呼吸気流量及び好ましくはその変化率を利用する。適切なメンバーシップ関数を使用して、ファジー集合のそれぞれにおける呼吸気流量信号のメンバーシップの度合い、すなわち、0、プラス、大きいプラス、マイナス、大きいマイナスが計算される。同様に、適切なメンバーシップ関数を使用して、ファジー集合のそれぞれにおける呼吸気流量信号の微分のメンバーシップの度合い、すなわち、安定、増加、高速増加、減少、高速減少が計算される。これらの集合におけるメンバーシップの度合いは、一群のファジー理論推論規則において使用される。各ファジー推論規則は呼吸の特定の位相に関連付けられる。多くの変形が可能であるが、好ましい実施形態においては、呼吸気流量に関連する推論規則が以下の通りである。
1.気流量が0で且つ高速増加である場合、位相は0回転。
2.気流量が大きいプラスで且つ安定である場合、位相は0.25回転。
3.気流量が0で且つ高速減少である場合、位相は0.5回転。
4.気流量が大きいマイナスで且つ安定である場合、位相は0.75回転。
5.気流量が0で且つ安定であり、呼吸気流量の5秒間ローパスフィルタ処理された絶対値が大きい場合、位相は0.9回転。
6.気流量がプラスで且つ位相が呼気である場合、位相は0.1回転。
7.気流量がマイナスで且つ位相が吸気である場合、位相は0.6回転。
8.呼吸気流量の5秒間ローパスフィルタ処理された絶対値が小さい場合、呼吸サイクルの位相は、患者の予期される呼吸数に等しい所定の割合で増大している。
9.呼吸気流量の5秒間ローパスフィルタ処理された絶対値が大きい場合、呼吸サイクルの位相は、20秒の時定数をもってローパスフィルタ処理された位相の既存の変化率に等しい安定した割合で増大している。
【0035】
ファジー推論規則を発展させて使用するための一般的な方法が米国特許出願第08/935,785号又は米国特許第6,532,957号に記載されている。一般に、吸気の開始点などの様々な特徴は、気流量−位相のグラフ上で特定され、また、それぞれの位相において、対応するファジー規則が発展される。例えば、「吸気の開始」点に適した規則は、「エフォート信号が小さく、エフォート信号の時間に関する2回微分が大きいプラス」であってもよい。メンバーシップ関数により、その規則は、吸気の開始時又はその近辺で最大限に起動される。好ましくは、最大起動の瞬間における正確な位相が実験的に決定されるべきである。この例において、最大起動は、吸気の開始の実際の瞬間の直後の位相、例えば0.05回転にあり、これは規則に関連する最良の位相である。特定されて規則及び位相が割り当てられる特徴が多ければ多いほど、これに伴う瞬間位相の決定がスムーズになる。無呼吸又は漏れの存在下において予期される呼吸数で位相が回転し続けるように更なる規則が与えられてもよい。サンプル規則8,9はこれらの目的をそれぞれ果たす。
【0036】
標準的なファジー推論方法を使用することにより起動の度合いG(n)を決定するために、ファジー推論規則の組み合わされた組の中のそれぞれの規則が評価される。例えば、規則2に関しては、規則の単位重み付けをとるそのような1つの方法により、(a)メンバーシップ関数「気流量が大きいプラス」における真理の度合いが0.6に評価し、(b)メンバーシップ関数「気流量信号が安定」における真理の度合いが0.4に評価するとともに、ファジー論理「AND」演算子が適用される場合、G(2)における起動の度合いは0.4となる。
【0037】
また、各ファジー推論規則は、特定の規則を特定の位相Φ(n)と関連付ける。例えば、先に示したように、規則2は、Φ(2)=0.25回転と関連付けられる。その後、各Φ(n)における起動の度合いG(n)を使用して、以下の式を使用するデファジー化ステップにおいて、瞬間の呼吸位相Φを表わす信号値が計算される。
Φ=arctan(Σ[G(n)sinΦ(n)],Σ[G(n)cosΦ(n)])
ここで、arctan関数は、その両方の引数が0であることが疑わしい場合に0の位相を与える4象限関数である。好ましい実施形態において、瞬間呼吸位相Φは0回転と1回転との間で連続な変数であり、この変数は、1つの呼吸サイクル(吸気の初めで開始し(0)、呼気の終わりで終了する(1))内の位置を比例的に表わしている。無論、当業者は、異なる数値範囲により瞬間呼吸位相を表わすことができることを認識している。
【0038】
前述したように、供給された圧力は、流量トリガされて位相循環される。機械状態のこの変化はステップ26において達成される。本発明を達成するための1つのアルゴリズムは以下の通りである。
(吸気が真であり)且つ(瞬間位相が瞬間位相閾値よりも大きい)場合には:
吸気を偽に設定し(すなわち、呼気が検出される)、
そうではなく、(吸気が偽であり)且つ(瞬間気流量が流量閾値よりも大きい)場合には:
吸気を真に設定する(吸気が検出される)。
【0039】
このようなアルゴリズムにおけるステップが、図3のフローチャートに図示されている。ステップ30において、機器は現在の呼吸状態を検査する。現在の状態が吸気である場合には、ステップ32において瞬間位相が位相閾値と比較される。好ましい実施形態において、位相閾値は、0.5回転であるが、それが1つの全体の呼吸サイクルに関連付けられたときには瞬間位相の数値範囲に応じて異なってもよい。吸気と呼気との間の切り換え点を表わす範囲の中央の数値が適している。ステップ32において、瞬間位相が閾値よりも大きい場合には、ステップ34が実行され、そうでない場合には、機械の状態の変化は生じない。ステップ34において、機械の状態は呼気に設定される。
【0040】
ステップ30において状態が吸気でない場合、ステップ36は瞬間の測定流量と気流量閾値とを比較する。流量が閾値よりも大きい場合、ステップ38において機械状態の変化が生じ、そうでない場合には変化が生じない。ステップ38においては、機械の状態が吸気に切り換えられる。
【0041】
このプロセスにおいては、機械が呼気レベルの圧力を供給している間に瞬間流量の測定値が流量閾値を超えると、機器が吸気の始まりを効果的に検出したため、機械は吸気圧力をトリガする。また、機械が吸気レベルの圧力を供給している間に、計算された瞬間位相が位相閾値を越えると、機器が呼気の始まりを効果的に検出したためあるいは呼気の始まりへ循環させる必要性を検出したため、機械は呼気圧力へ循環させる。
【0042】
B.換気量エラーと共に変化するコントローラゲイン
様々な呼吸努力及び患者状態の存在下で患者の適切な換気量を保証するため、目標換気量Vtarget及び実際の換気量Vactualに応じて、振幅Aの調整により、吸気中に供給される圧力P(t)が設定される。換気量Vactualのフィードバック測定値を用いて、目標換気量Vtargetを満たすようにサポートがサーボ制御される。供給圧サポート振幅Aの計算は以下の通りである。
【数3】
ここで、Eは、換気量エラーの測定値であり、例えば、以下のような絶対換気量エラー、
E(t)=Vtarget−Vactual(t)
又は、以下によって規定される相対換気量エラー
E(t)={Vtarget−Vactual(t)}/Vtarget
である。
【0043】
それは、明らかに、ある関数Hにおいて以下のようになる場合である。
G(E(t))・E(t)=H(E(t))
【0044】
この積分サーボコントローラにおいては、dA/dtが一般にEと共に増加するがその増加が因数G(E)によって変えられることを指し示すため、上記方程式はHではなくGに関して表わされる。
【0045】
一般に、Eが絶対換気量エラーである場合、積分サーボコントローラのゲインGは、0.1〜0.3cmH2O/(L/min)換気量エラー/秒の範囲の値が適している。しかしながら、目標近くで換気量レベルをサーボ制御する際には、目標を迅速且つ完全に満たすことが常に望ましいとは限らずあるいは常に必要であるとは限らない。例えば、患者が受ける適度な過小換気の特定の短い時期(すなわち、VactualがVtargetを下回る)においては、換気量不足に対する完全且つ迅速な補償応答を行なうことが望ましくない場合がある。より迅速なあるいは積極的な調整は、眠っている患者を目覚めさせる場合があり、さもなければ、機械の患者との同期に思わしくない影響を与える場合がある。そのような変化も患者にとってあまり快適ではない可能性がある。したがって、本発明の好ましい実施形態において、ゲインGは、換気量の測定値の目標値からの逸脱量に応じて変化する。これにより、目標値からの僅かな逸脱に関して供給換気量の変化の必要性が検出される場合に、エラーに対してゆっくりと応答することができる一方で、目標値からの大きな逸脱に関してより急速なエラーへの応答を行なうこともできる。すなわち、ゲインにより、患者は、大きく逸脱していなければ、積極的な応答を伴うことなく、自分の換気量を目標換気量近辺で変えることができる。しかし、換気量が目標から著しく外れている場合には、より積極的な応答がとられてもよい。同様に、患者が過剰換気される際にゲインによって換気量サポートを徐々に引き下げることができるように、ゲインは、患者の換気量が目標を上回っているかあるいは下回っているかどうかに応じて異なってもよい。これは、患者が元の換気量不足状態に陥らされそうになるために今しがた増大したサポートを急に取りやめることが望ましくないからであり、また、漏れが急速に変化し、この変化を漏れ補償システムが実質的に補償しなかったために換気量が目標を上回っていると思われるからである。
【0046】
換気量目標値からの換気量測定値の隔たりに応じてゲインを変えるために様々な方法が利用されてもよい。図4のグラフにおいて左右対称な階段関数40で図示される一実施形態において、ゲインGは閾値(T)42の関数である。閾値を上回る隔たりにおいては、エラー当たり高いゲイン(高ゲイン/エラー)が実施され、また、閾値を下回る隔たりにおいては、エラー当たり低いゲイン(低ゲイン/エラー)が実施される。例えば、以下のアルゴリズムはこの実施形態を達成できる。
d<Tの場合には、
G=低ゲイン/エラー
そうでない場合には、
G=高ゲイン/エラー
ここで、
dは目標値[Vactual−Vtarget]からの隔たりであり、
Tは隔たり閾値である。
【0047】
例えば、高ゲイン/エラーとして、エラー当たり0.3cmH2O/(L/min)の典型的なゲインサーボが利用されてもよく、また、高ゲイン/エラーの特定の一部分が低ゲイン/エラー(例えば0.2cmH2O)に適している。一実施形態においては、換気量測定値及び目標換気量が分時拍出量である場合、閾値は1.0リットル/分エラーである。
【0048】
関数44は、換気量目標値からの換気量測定値の隔たりに応じてゲインが変化する別の例である。この関数も、目標値近辺で左右対称であるが、ゲインの急な変化を示していない。また、先の実施形態で示した対称な応答とは異なり、患者の測定された換気量が換気量目標値を上回っているかあるいは下回っているかどうかに応じて異なるゲイン応答を許容するため、ゲイン調整が非対称に実施されてもよい。これらの原理を図5のグラフに示される好ましい関数によって図示する。当業者は、図5に図示されるように人工呼吸装置を用いて相対換気量エラーのグラフの関数を実施する方法を認識している。
【0049】
図5に示されるように、測定された換気量が目標から離れると、ゲインが次第に変化して、人工呼吸器の換気応答が増大する。しかしながら、目標の上下で異なるゲインを適用される。目標値を上回る呼吸気流量において、ゲインは、目標値を下回る対応する呼吸気流量におけるゲインよりも小さい。したがって、相対換気量エラーが0.5を超える過換気患者の場合、ゲインは、特定の中間ゲイン、例えば0.1cmH2O/(L/min)/秒を越えない。これは、より積極的な応答が重要ではないからである。同様に、患者が過換気状態にあることを明らかにするようにシステムにおける漏れが患者の換気量測定値を変化させるため、積極的な応答が正しくない場合がある。逆に、患者の過小換気量の度合いが著しい場合(例えば−0.3の相対換気量エラー)には、より積極的な応答が好ましいため、例えば0.3cmH2O/(L/min)/秒の高いゲインが利用される。好ましい実施形態において、換気量の測定値は最小量又は最小換気量であり、したがって、ゲイン調整は相対最小換気量エラーの関数である。
【0050】
エラーと共に変化するゲインが使用される場合、使用される換気量の測定値は好ましくは呼吸中に目に見えて変化してはならない。上記方程式で与えられる換気量の測定値、すなわち、呼吸気流量の絶対値の半分を使用すると、呼吸中の圧力サポートの変化は、吸気と呼気との間の移行部におけるゼロの換気量から、吸気及び呼気の流量のピーク時における目標換気量を大きく上回る換気量の値までの換気量範囲にわたるゲインと瞬間エラーとの積の積分である(換気量が目標値にあるときの一般的な呼吸を考える)。これは、一定のゲインと共に申し分なく働く。なぜなら、上記方程式の場合のように、積分の外側でゲインをとることができるからである。しかし、エラーと共に変化するゲインを用いると、呼吸中に実質的に変化する換気量のそのような測定値により、呼吸の一般的な換気量にとって望ましいゲインを与えることができない。その代わり、幅広い範囲の換気量のためのゲインが検討され、特に、呼吸流量がゼロを横切る度に、最大換気量エラーのためのゲインが適用される。そのため、呼吸流量の絶対値の半分をローパスフィルタ処理して、ゲインを決定する前に換気量及び換気量エラーを計算することが必要である。このローパスフィルタリングの欠点は、換気量変化に対する応答の遅れである。
【0051】
多くの時間にわたって十分にフィルタ処理された測定値を使用するが重度の過小換気に対して素早く応答できる1つの方法は、異なる応答速度を持つ換気量の2つの測定値を使用することである。呼吸中に若干変動する急速に応答する換気量の測定値(「高速換気量」)は、それが適度に目標値を下回っていなければ圧力サポートに影響を及ぼさない。この点から、高速換気量が更に減少すると、圧力サポートの計算においては、高速換気量が圧力サポートの唯一の決定子となる1つの点に達するまで、更にゆっくりと応答する測定値(「低速換気量」)が次第に重要でなくなるとともに、高速換気量が次第に重要になってくる。
【0052】
特に、低速及び高速相対換気量エラーEs及びEfをそれぞれ使用する一実施形態は、圧力サポート振幅Aの変化率に関する以下の方程式を使用する。
【数4】
【0053】
適切なゲイン値はGf=0.7及びGs=0.5cmH2O/秒(前述した圧力サポート振幅Aは、dA/dtを積分することにより決定することができる。)である。
【0054】
C.肺胞換気量目標値
本発明の他の態様は、患者の呼吸器系における実際のガス交換に正確に対応する換気量目標値を維持するための人工呼吸器の制御を伴っている。この態様は、肺胞換気量の測定のサーボ制御を含む。これまで説明した装置は、単純な分時拍出量を目標換気量として利用してもよいが、本発明のこの態様では、好ましい目標換気量VTGTが肺胞換気量である。
【0055】
図6は、肺胞換気量を維持するために圧力をサーボ制御する方法のステップを定めている。入力ステップ50において、ユーザは、患者における肺胞排気量目標値の計算を支援するために必要な患者の特定の情報を入力するように促される。ステップ52においては、肺胞換気量目標値が計算される。ステップ54においては、肺胞換気量の測定が行なわれる。ステップ56では、肺胞排気量目標値エラーを得るために測定値と目標値とが比較される。ステップ58では、肺胞排気量目標値エラーに基づいて圧力が調整される。
【0056】
このような換気量測定を装置が制御できるようにするには、患者の生理学的死腔VD(肺胞+解剖学的死腔)の推定値が必要とされる。簡単な実施形態においては、肺胞換気量の制御前に、前述したようにステップ50においてユーザは推定値を装置に入力するように促されてもよい。したがって、ユーザは、患者の前の解析から決定された死腔容積VD及び肺胞容積VAを入力してもよい。VDは、死腔を解析するための任意の既知の方法によって、例えばファウラーの方法又はボーアの方法を使用することによって決定されてもよい。死腔容積を決定するためのファウラー方法及びボーア方法についは、Respiratory Physiology − the essentials 5th ed., Baltimore MD, Williams & Wilkins, 1995においてJohn B. Westにより説明されている。あるいは、VDは、所定の量であってもよく、あるいは、他の情報が入力されないあるいは計算されない場合には既定量、例えば150mlであってもよい。
【0057】
あるいは、装置は、患者のサイズに関する質問へのユーザ応答に基づくテーブルから解剖学的死腔容積を推定してもよい。例えば、使用前、装置は、身長、年齢、性別に関してユーザに入力を促してもよい。この情報を用いて、装置は、このような情報がそのようなユーザのための理想的な体重に関連付けられている1つ又は複数のテーブルにアクセスしてもよい。そのような患者の決定された理想的な体重を用いて、理想的な体重の1kg毎に2mlの解剖学的死腔容積を許容することにより、解剖学的死腔が推定されてもよい。当業者であれば認識しているように、テーブルは、前述した1対1の近似に基づく体重ではなく、年齢、身長、性別に基づく解剖学的死腔を含んでいてもよい。年齢、身長、性別に基づく患者のための理想的な体重は、当分野において既知である。一実施形態において、装置は、実際の体重及び解剖学的死腔容積に関してユーザに入力を促してもよく、あるいは、これらから前述した式に基づいて概算されてもよい。また、この体重は、患者の肥満度に基づいて、例えば肥満度指数(BMI)又は皮膚のひだの厚さの入力によって調整されてもよい。当業者は、テーブル又は他の式又は計算を利用することにより患者のサイズから解剖学的死腔容積を概算するための様々な方法を認識している。一実施形態において、解剖学的死腔の前記体重関連の推定値は、VDとして、又は、肺胞及び解剖学的死腔の両方に関する推定値として見なされてもよい。あるいは、肺胞死腔のための別個の推定がなされてもよく、また、そのような推定が解剖学的死腔と組み合わされてもよい。したがって、装置の更なるプロンプティングは、全死腔容積VD(すなわち、生理学的死腔[VD=VALD+VAND])の推定値として役立つように、解剖学的死腔VANDと組み合わされる肺胞死腔VALDの推定値を与えてもよい。
【0058】
本発明の一実施形態において、死腔VDは、VD=F(VT)のように、治療の準備中に測定される患者の予期される1回換気量又は最近計算された1回換気量の関数であるように解釈されてもよい。そのような実施形態において、関数は、安静時の正常な患者における1回換気量の約0.2〜0.35の範囲の所定のパーセント、又は、大体30%すなわち約1/3であってもよく、安静時に慢性閉塞性肺疾患等の肺病を持っている患者に関してはこれよりも更に高くてもよい。肺病をもっている特定の患者が正常な患者よりも大きい度合いの死腔を有する場合には、一実施形態において、装置は、患者が肺病又はCOPD(例えば気腫又は慢性細気管支炎)を持っているかどうかを決定するためにユーザから入力を促してもよい。所定のパーセントは、そのような患者における範囲の高い方の端の値に設定されてもよく、あるいは、応答が否定的である場合には範囲の下端に設定される。あるいは、VDを得るために1回換気量に基づくアフィン関数が利用されてもよく、また、場合によっては、このアフィン関数は、装置によって促された患者の病状に依存していてもよい。例えば、図7に図示されるように、アフィン関数60は、死腔を決定するために1回換気量の関数として利用されてもよい。場合によっては、患者がCOPD又は任意のそのような特定の病気を患っているかどうかに応じて異なる関数が選択されてもよい。したがって、図7に図示されるように、患者の病気又は肺胞死腔(VALD)に関連付けられた特定の容積オフセット62が、1回換気量の患者の関数に対して適用されてもよい。本発明の更に他の実施形態において、VDは、動脈分圧二酸化炭素PCO2又はマスク内の呼気CO2を測定するために電子的に組み込まれたモニタを使用することにより推定されてもよい。CO2データは、ボーアの方程式にしたがって学習期間中に肺胞換気量目標値を得るために利用され、その後、目標肺胞換気量に等しいサポートをサーボ制御するために使用されてもよい。
【0059】
前述したように、好ましい目標値Vtargetは肺胞分時拍出量である。図6の計算ステップ52中において、装置は、肺胞分時拍出量目標値を計算するように構成されあるいは肺胞分時拍出量目標値を計算するように以下の式をもってプログラムされてもよい。
肺胞分時拍出量(Valveolar−minute)=VA×R
ここで、
VAは、肺胞容積(VA=VT−VD)であり、
VTは、患者の予期される1回換気量であり、
VDは、患者の死腔容積であり、
Rは、患者の予期される呼吸数(呼吸/分)である。
あるいは、目標値は、この計算されたValveolar−minuteの関数として設定されてもよい。例えば、目標値は、この計算されたValveolar−minuteの95%に設定されてもよい。
【0060】
この決定で利用される期待値のため、ステップ50において、装置は、患者の予期される1回換気量VT及び予期される呼吸数Rの入力を促してもよい。しかしながら、そのような患者固有の情報は、アウェイク学習期間(awake learning period)中に装置により測定されてもよく、または、先に特性された情報の一部の入力に基づいて計算されてもよい。例えば、呼吸数は、アウェイク学習期間の少なくとも75%にわたるメジアン呼吸数として解釈されてもよい。場合によっては、目標値計算が呼吸数などのアウェイク学習期間から得られた測定値に基づいている場合には、参照としてその開示内容が本明細書に組み込まれる同一出願人による米国特許第6,644,312号に記載されているように、睡眠に関連付けられた呼吸の違いを考慮するべく目標肺胞分時拍出量の計算が調整されてもよい。
【0061】
学習期間の一部の間にわたる平均肺胞換気量は以下のように計算することができる。各呼吸のそれぞれにおいて1回換気量VTが存在し、また、時間Tにわたって呼吸がN個存在し且つ肺胞1回換気量が関数a(VT)により1回換気量の関数として与えられる場合には、平均肺胞換気量が以下によって与えられる。
【数5】
しかし、異常値及びアーティファクトを拒絶するために望ましいメジアン肺胞換気量が必要とされる場合、呼吸的なメジアンは不適当である。なぜなら、呼吸的メジアンは、長い呼吸に対する重みと同じ重みを短い呼吸(一般的には1回換気量が少ない)に対して与え、そのため、一般的に、例えば平均換気量に対して対称な時間に関する肺胞換気量の分配など、平均換気量と同じ結果を与えなければならない場合にそのような結果を与えないからである。これは望ましくない。時間的なメジアンが更に望ましい。数学的には、各呼吸の時間に対してその呼吸中に肺胞換気量(肺胞容積を呼吸持続時間で割ったもの)を割り当てることにより、区分的に一定の時間の関数が構成され、それにより、この関数のメジアンが計算される。実際には、これに対する近似値は、肺胞換気量のヒストグラムを形成することによって効率的に計算することができる。それぞれの呼吸毎に肺胞換気量が計算され、また、ヒストグラムにおける対応する入力が、呼吸の持続時間に比例する大きさだけインクリメントされる。その後、通常の方法でヒストグラムのメジアンが計算される。
【0062】
ステップ54において患者が体験した実際の供給肺胞換気量Vactualの測定値は、1回換気量VT及び呼吸数が好ましくは患者からの呼吸気流量の測定値から連続的に決定された最近の測定値であるという点を除き、目標値計算と同じ式に基づいている。例えば、呼吸数は、前の1分間にわたって患者がとった最近の平均呼吸数すなわち呼吸の数である。1回換気量は、前の呼吸からの量又は前の1分間にわたってとられた呼吸からの平均の量である。また、1回換気量は、分時換気量の測定値を呼吸頻度で割る(Vmin/fresp)ことによって決定されてもよい。好ましくは、分平均を達成するように時定数が選択された4次ローパスベッセルフィルタを用いて呼吸気流量の絶対値の半分をフィルタ処理することにより、分時換気量を得ることができる。入力される患者の死腔容積VDは、一定に保たれてもよく、あるいは、前述したように1回換気量に応じて変化してもよい。
【0063】
あるいは、実際の供給肺胞換気量Valveolar(又は、期待値に基づく目標値)は、以下の式にしたがって計算されてもよい。
【数6】
ここで、
Vtotalは、用途に適した応答を与えるように選択されたコーナー周波数をもってローパスフィルタ処理された(制御に関しては、振動を避けるためにサーボ制御応答よりも著しく速い;目標値決定に関しては、可能性としてかなり遅い)、呼吸気流量の絶対値の半分などの気流量から得られる換気量である。
VDは、前述した方法のうちの任意の1つによって決定された死腔容積であり、
frespは、前述したように瞬間位相変数の1分当たりの回転数として計算されてもよい呼吸頻度(1分当たりの呼吸)である。
【0064】
肺胞換気量を計算する好ましい方法は以下の通りである。
【0065】
FRC(機能残気量、呼気の最わりの肺容量)を超えて吸い込まれる量Vの関数として供給される肺胞容積がU(V)によって与えられるとする。その後、吸気及び呼気の両方の最中にわたって以下の値がローパスフィルタに対して入力され、ローパスフィルタの出力が肺胞換気量の測定値となる。
【数7】
ここで、Qは時間の関数としての呼吸流量であり、プライム(’)記号は微分を示しており、t0はつい最近の吸気又は呼気の開始時間である。
【0066】
直感的に、呼吸流量の絶対値の半分には、容積に関連して、肺胞容積が増大する比率が掛け合わされる。計算された肺胞換気量から解剖学的死腔VDAのみを排除する特定の場合において、これは、つい最近の吸気又は呼気の開始後に容積を計算することに相当し、また、この容積が死腔よりも小さい場合にはローパスフィルタへの入力をゼロにすることに相当し、また、さもなければ、呼吸流量の絶対値の半分に等しい入力を行なうことに相当する。その理由は、ここでは、本発明者らが以下の式を持っているからである。
【数8】
【0067】
換気量の計算において、吸気流量又は呼気流量のいずれか1つだけを使用するのではなく、吸気流量及び呼気流量の両方を使用する利点としては、流量のベースラインエラーに対する感度の低下、よりスムーズなフィルタ出力を挙げることができる。
【0068】
実際の肺胞換気量及び目標肺胞換気量が決定されると、例えば以下のようにエラーに基づいて供給圧サポート振幅Aを調整することができる。
【数9】
【0069】
その後、前述した振幅Aにしたがって供給圧が設定される。
【0070】
D.漏れが急速に変化する際の圧力サポート調整の減少
漏れの急速な変化により、呼吸流量ベースラインが一時的に不正確となり、それにより、殆どの場合、計算された換気量が実際の換気量よりも高くなるという影響を受け、その結果、圧力サポートは、不適切に減少し、あるいは、通常の速度よりもゆっくりと増大する。
【0071】
前述したBerthon−Jonesによる特許第6,532,957号は、「ジャミング」と呼ばれるファジー量を使用することによりこの影響を低減する1つの方法について記載している。
【0072】
本発明においては、この影響を減らすため、漏れが急速に変化している程度の異なるファジー指標R(0≦R≦1)を使用して、先に計算された圧力サポート振幅の調整の割合dA/dtに(1−R)を掛け合わせることにより、圧力サポート調整の割合を減らしている。Rを計算するため、ピーク保持傾向を有するローパスフィルタを用いて推定呼吸流量が処理され、それにより、典型的に漏れ推定値が応答するよりも急速に応答することから漏れ推定値が正しくないことを警告する残留漏れ(補償されない漏れとして規定される)の推定値Lが生成されるが、この推定値は、それ単独で急速に変動するため、呼吸流量の計算のために漏れ推定値として直接に役に立たない。Lの絶対値が小さい(例えば、目標換気量よりも小さい)と、Rは0となり、また、Lの絶対値が大きい(例えば、目標換気量の2倍)と、Rは1となり、これらの間でRが直線的に補間される。
【0073】
Lを生成するフィルタの実施は以下の通りである。第1の段階は、3.2/60Hzのコーナー周波数を有する4極ベッセルローパスフィルタである。第2の段階は、瞬時立ち上がりの可変時定数1次ローパス立下りフィルタである。この場合、「立ち上がり」とは、前回の出力のゼロから離れる方向での増大を意味しており、そのため、例えば、出力の前の値がマイナスであった場合、「立ち上がり」は、更にマイナスになることを意味している。「立下り」とは、ゼロへ向かう移動を意味している。時定数は、流量がゼロから遠くなると長くなる。目標換気量(同じ流量単位において両方)に対してフィルタ処理された呼吸流量(第1の段階の出力)が以下によって与えられるとする。
QR=Qrespiratory, filtered/Vtarget
【0074】
このとき、毎秒1の単位の立下り速度定数(立下り時定数の逆数)は、以下によって与えられる。
1/0.5 QR≦0.75のとき
1/5 QR≧2のとき
α/5+(1−α)/0.5 上記以外のとき
ここで、α=(QR−0.75)/1.25
【0075】
第2の段階の目的は、ゼロから更に離れる第1の段階の出力の値の近くに第2の段階の出力を維持させることである(典型的に、第1の段階の出力は、一見して正弦波+ゆっくりと変化する「DC」値のようである)。
【0076】
残留漏れを補償するこの方法は、通常よりも十分に長いはっきりとした吸気期間又は呼気期間を生じる(一般に、これらの長い期間を生じさせるためには、例えば漏れが突然に増大する場合に呼気の全体にわたってあるいは殆どの呼気中に推定呼吸流量をプラスにするのに十分大きいベースラインシフトが必要である)ほど十分に大きくない残留漏れを検出できるという点で、Berthon−Jones特許第6,532,957号に記載された「ジャミング」を超える利点を有する。
【0077】
この全開示内容に記載された様々な実施形態を参照して本発明を説明してきたが、これらの実施形態が本発明の様々な原理の適用の単なる例示であることは言うまでもない。本明細書で説明した本発明の例示的な実施形態に加えて、多数の変更がなされてもよく、また、本発明の思想及び範囲から逸脱することなく他の構成が考え出されてもよい。
【0078】
[関連出願]
本出願は、2003年11月26日に出願された米国仮出願第60/525,219号の利益を主張する。
【特許請求の範囲】
【請求項1】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
現在の呼吸サイクルの位相を決定するステップと、
(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅と、(c)前記差分測定値の大きさに応じて変化するゲイン係数との積の関数である圧力で、患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項2】
前記ゲイン係数が前記差分測定値の大きさと共に増大する、請求項1に記載の換気支援を行なうための方法。
【請求項3】
前記目標値の上下で差分測定値が等しい場合、ゲイン係数が、前記目標値を下回る差分測定値において大きい、請求項2に記載の換気支援を行なうための方法。
【請求項4】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項3に記載の換気支援を行なうための方法。
【請求項5】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項1に記載の換気支援を行なうための方法。
【請求項6】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項5に記載の換気支援を行なうための方法。
【請求項7】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項1に記載の換気支援を行なうための方法。
【請求項8】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項1に記載の換気支援を行なうための方法。
【請求項9】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項10】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項9に記載の換気支援を行なうための方法。
【請求項11】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項9に記載の換気支援を行なうための方法。
【請求項12】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項9に記載の換気支援を行なうための方法。
【請求項13】
自発呼吸する患者に対する換気支援を行なうための方法において、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量と目標値との間の差分を決定するステップと、
患者に対してエアーを供給することにより前記差分に応答するサーボ制御ループでブロワを使用するステップであって、前記サーボ制御ループが前記差分の大きさと共に増大するゲインを有するステップと、
を備える方法。
【請求項14】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項13に記載の換気支援を行なうための方法。
【請求項15】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項13に記載の換気支援を行なうための方法。
【請求項16】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分のいずれかの極性において、供給されるエアーの圧力が、前記差分を減らす傾向にあるそれぞれの方向で変えられる、請求項13に記載の換気支援を行なうための方法。
【請求項17】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するステップと、
現在の呼吸サイクルの位相を決定するステップと、
(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅との積の関数である圧力で、患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項18】
エアーが、前記差分測定値に応答するサーボ制御ループでブロワを使用することにより前記患者に対して供給され、前記サーボ制御ループが前記差分測定値の大きさと共に増大するゲインを有する、請求項17に記載の換気支援を行なうための方法。
【請求項19】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項18に記載の換気支援を行なうための方法。
【請求項20】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項17に記載の換気支援を行なうための方法。
【請求項21】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項20に記載の換気支援を行なうための方法。
【請求項22】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項17に記載の換気支援を行なうための方法。
【請求項23】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
を備える方法。
【請求項24】
前記サーボ制御ループが、前記差分の大きさと共に増大するゲインを有する、請求項23に記載の換気支援を行なうための方法。
【請求項25】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項24に記載の換気支援を行なうための方法。
【請求項26】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項23に記載の換気支援を行なうための方法。
【請求項27】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
エラー信号を得るために、呼吸気流量の関数と目標値との間の差分を積分するステップと、
現在の呼吸サイクルの位相を決定するステップと、
患者に対して供給されるエアーの圧力をサーボ制御するためにエラー信号を使用するステップと、
通常の呼吸サイクルに適した振幅−位相テンプレートを使用し、更に、現在の呼吸サイクルの決定された位相におけるテンプレート振幅にしたがって、患者に対して供給されるエアーの圧力を制御するステップと、
前記エラー信号の大きさにしたがってサーボ制御のゲインを調整するステップと、
を備える方法。
【請求項28】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項27に記載の換気支援を行なうための方法。
【請求項29】
前記目標値の上下でエラー信号が等しい場合、ゲインが、前記目標値を下回るエラー信号において大きい、請求項28に記載の換気支援を行なうための方法。
【請求項30】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項29に記載の換気支援を行なうための方法。
【請求項31】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項27に記載の換気支援を行なうための方法。
【請求項32】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項31に記載の換気支援を行なうための方法。
【請求項33】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項27に記載の換気支援を行なうための方法。
【請求項34】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項27に記載の換気支援を行なうための方法。
【請求項35】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
エラー信号を得るために、呼吸気流量の関数と目標値との間の差分を積分するステップと、
患者に対して供給されるエアーの圧力をサーボ制御するためにエラー信号を使用するステップと、
前記エラー信号の大きさにしたがってサーボ制御のゲインを調整するステップと、
を備える方法。
【請求項36】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項35に記載の換気支援を行なうための方法。
【請求項37】
前記目標値の上下でエラー信号が等しい場合、ゲインが、前記目標値を下回るエラー信号において大きい、請求項36に記載の換気支援を行なうための方法。
【請求項38】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項37に記載の換気支援を行なうための方法。
【請求項39】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項35に記載の換気支援を行なうための方法。
【請求項40】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項35に記載の換気支援を行なうための方法。
【請求項41】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、
前記差分測定値の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、また、前記差分測定値の大きさに応じて変化するゲイン係数で、ブロワにより患者に対してエアーを供給させる制御機構と、
を備える装置。
【請求項42】
前記ゲイン係数が前記差分測定値の大きさと共に増大する、請求項41に記載の換気支援を行なうための装置。
【請求項43】
前記目標値の上下で差分測定値が等しい場合、ゲイン係数が、前記目標値を下回る差分測定値において大きい、請求項42に記載の換気支援を行なうための装置。
【請求項44】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項43に記載の換気支援を行なうための装置。
【請求項45】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項41に記載の換気支援を行なうための装置。
【請求項46】
前記処理手段がファジー理論規則の組を利用する、請求項45に記載の換気支援を行なうための装置。
【請求項47】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性においては、前記制御機構により、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項41に記載の換気支援を行なうための装置。
【請求項48】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項41に記載の換気支援を行なうための装置。
【請求項49】
自発呼吸する患者に対する換気支援を行なうための装置において、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための処理手段と、
前記差分測定値の関数である圧力でブロワにより患者に対してエアーを供給させる制御機構であって、そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用する制御機構と、
を備える装置。
【請求項50】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいゲインを使用する、請求項49に記載の換気支援を行なうための装置。
【請求項51】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項49に記載の換気支援を行なうための装置。
【請求項52】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性においては、前記制御機構により、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項49に記載の換気支援を行なうための装置。
【請求項53】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、
前記差分測定値の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、ブロワにより患者に対してエアーを供給させるための制御機構と、
を備える装置。
【請求項54】
前記制御機構が、前記差分測定値に応答するサーボ制御ループでブロワを使用することにより前記患者に対してエアーを供給させ、前記サーボ制御ループが前記差分測定値の大きさと共に増大するゲインを有する、請求項53に記載の換気支援を行なうための装置。
【請求項55】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいループゲインを使用する、請求項54に記載の換気支援を行なうための装置。
【請求項56】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項53に記載の換気支援を行なうための装置。
【請求項57】
前記処理手段がファジー理論規則の組を適用する、請求項53に記載の換気支援を行なうための方法。
【請求項58】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、前記ブロワが、前記差分測定値を減らす傾向にあるそれぞれの方向で変化する圧力でエアーを供給する、請求項53に記載の換気支援を行なうための装置。
【請求項59】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するための処理手段と、
前記差分測定値の関数である圧力でブロワにより患者に対してエアーを供給させるための制御機構と、
を備える装置。
【請求項60】
前記制御機構が、そのゲインが前記差分測定値の大きさと共に増大するサーボ制御ループを作動させる、請求項59に記載の換気支援を行なうための装置。
【請求項61】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいループゲインを使用する、請求項60に記載の換気支援を行なうための装置。
【請求項62】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、前記ブロワが、前記差分測定値を減らす傾向にあるそれぞれの方向で変化する圧力でエアーを供給する、請求項59に記載の換気支援を行なうための装置。
【請求項63】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値であるエラー信号を得るとともに、現在の呼吸サイクルの位相を決定するための処理手段と、
前記エラー信号の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、ブロワにより患者に対してエアーを供給させるためのサーボ制御機構と、
を備え、
前記サーボ制御機構が、前記エラー信号の大きさにしたがってそのゲインを調整する装置。
【請求項64】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項63に記載の換気支援を行なうための装置。
【請求項65】
前記目標値の上下でエラー信号が等しい場合、前記ゲインが、前記目標値を下回るエラー信号において大きい、請求項64に記載の換気支援を行なうための装置。
【請求項66】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項65に記載の換気支援を行なうための装置。
【請求項67】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項63に記載の換気支援を行なうための装置。
【請求項68】
前記処理手段がファジー理論規則の組を適用する、請求項67に記載の換気支援を行なうための装置。
【請求項69】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項63に記載の換気支援を行なうための装置。
【請求項70】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項63に記載の換気支援を行なうための装置。
【請求項71】
自発呼吸する患者に対する換気支援を行なうための装置であって、
エラー信号を得るために呼吸気流量の関数と目標値との間の差分を積分するための手段と、
前記エラー信号に応答して、患者に対して供給されるエアーの圧力を制御するためのサーボ手段と、
を備え、
前記サーボ手段が、前記エラー信号の大きさにしたがってそのゲインを調整する装置。
【請求項72】
前記サーボ手段が、前記エラー信号の大きに伴ってそのゲインを増大する、請求項71に記載の換気支援を行なうための装置。
【請求項73】
前記目標値の上下でエラー信号が等しい場合、前記サーボ手段が、前記目標値を上回るエラー信号においてよりも前記目標値を下回るエラー信号において大きいゲインを使用する、請求項72に記載の換気支援を行なうための装置。
【請求項74】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項71に記載の換気支援を行なうための装置。
【請求項75】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項71に記載の換気支援を行なうための装置。
【請求項76】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項71に記載の換気支援を行なうための装置。
【請求項77】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
過換気の状態においてよりも過小換気の状態において積極的にゲインを変化させるステップと、
を連続的に繰り返すことを備える方法。
【請求項78】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項77に記載の換気支援を行なうための方法。
【請求項79】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項77に記載の換気支援を行なうための方法。
【請求項80】
前記差分測定値が、実際の換気量と目標換気量との間の差を目標換気量で割ったものに比例する相対換気量エラーの関数である、請求項77に記載の換気支援を行なうための方法。
【請求項81】
前記圧力が流量トリガされて位相循環される、請求項77に記載の換気支援を行なうための方法。
【請求項82】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
患者が過小換気されている場合よりも患者が過換気されている場合において換気量サポートを緩やかに引き下げることができるようにゲインを変化させるステップと、
を連続的に繰り返すことを備える方法。
【請求項83】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項82に記載の換気支援を行なうための方法。
【請求項84】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項82に記載の換気支援を行なうための方法。
【請求項85】
前記圧力が流量トリガされて位相循環される、請求項82に記載の換気支援を行なうための方法。
【請求項86】
自発呼吸する患者に対する換気支援を行なうための方法であって、
一方が高速で他方が低速である異なる応答速度で2つの患者換気量測定値を決定するステップと、
目標値と2つの患者換気量測定値のうちの対応するそれぞれの測定値との関数である2つのエラー信号を得るステップと、
2つのエラー信号に対応する2つの制御応答を得るステップと、
前記エラー信号のうちの対応するエラー信号の大きさ及び符号にしたがって前記各制御応答を調整することにより、高速換気量におけるエラーに対する制御応答が低速換気量測定値におけるエラーに対する制御応答よりも積極的となるようにするステップと、
高速応答換気量測定値が目標値よりも益々小さくなるにつれて、低速換気量測定値に対する制御応答よりも高速換気量測定値に対する制御応答に益々有利に働くように、両方の制御応答を組み合わせて全制御応答を生成するステップと、
前記全制御応答を使用して、患者に対して供給されるエアーの圧力を制御するステップと、
を連続的に繰り返すことを備える方法。
【請求項87】
制御の度合いが、前記エラー信号の大きさに伴って増大する、請求項86に記載の換気支援を行なうための方法。
【請求項88】
前記目標値の上下でエラー信号が等しい場合、制御の度合いが、前記目標値を下回るエラー信号において大きい、請求項87に記載の換気支援を行なうための方法。
【請求項89】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項86に記載の換気支援を行なうための方法。
【請求項90】
自発呼吸する患者に対する換気支援を行なうための装置であって、呼吸器流量を決定するとともに、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための制御機構と、前記差分測定値の関数である圧力で患者に対してエアーを供給するためのサーボ制御ブロワとを備え、前記圧力が前記差分測定値の大きさによって決まり、前記ブロワが、過換気の状態においてよりも過小換気の状態において積極的に圧力を変化させる装置。
【請求項91】
前記目標値を上回る呼吸気流量において、圧力が、前記目標値を下回る対応する呼吸気流量における場合よりも積極的に変化しない、請求項90に記載の換気支援を行なうための装置。
【請求項92】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項90に記載の換気支援を行なうための装置。
【請求項93】
前記差分測定値が、実際の換気量と目標換気量との間の差を目標換気量で割ったものに比例する相対換気量エラーの関数である、請求項90に記載の換気支援を行なうための装置。
【請求項94】
前記圧力が流量トリガされて位相循環される、請求項90に記載の換気支援を行なうための装置。
【請求項95】
自発呼吸する患者に対する換気支援を行なうための装置であって、呼吸器流量を決定するとともに、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための制御機構と、前記差分測定値の関数である圧力で患者に対してエアーを供給するためのサーボ制御ブロワとを備え、前記圧力が前記差分測定値の大きさによって決まり、前記ブロワが、患者が過小換気されている場合よりも患者が過換気されている場合において換気量サポートを緩やかに引き下げることができる装置。
【請求項96】
前記目標値を上回る呼吸気流量において、ブロワが、前記目標値を下回る対応する呼吸気流量において行なうよりもゆっくりと圧力変化を行なう、請求項95に記載の換気支援を行なうための装置。
【請求項97】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項95に記載の換気支援を行なうための装置。
【請求項98】
自発呼吸する患者に対する換気支援を行なうための装置であって、一方が高速で他方が低速である異なる応答速度で2つの患者換気量測定値を決定し、目標値と2つの患者換気量測定値のうちの対応するそれぞれの測定値との関数である2つのエラー信号を取得し、2つのエラー信号に対応する2つの制御応答を取得し、前記エラー信号のうちの対応するエラー信号の大きさ及び符号にしたがって前記各制御応答を調整することにより、高速換気量測定値におけるエラーに対する制御応答が低速換気量測定値におけるエラーに対する制御応答よりも積極的となるようにし、また、高速応答換気量測定値が目標値よりも益々小さくなるにつれて、低速換気量測定値に対する制御応答よりも高速換気量測定値に対する制御応答に益々有利に働くように、両方の制御応答を組み合わせて全制御応答を生成する制御機構と、前記全制御応答に応答して、患者に対して供給されるエアーの圧力を制御するブロワとを備える装置。
【請求項99】
前記ブロワによって行なわれる制御の度合いが、前記エラー信号の大きさに伴って増大する、請求項98に記載の換気支援を行なうための装置。
【請求項100】
前記目標値の上下でエラー信号が等しい場合、前記ブロワによって行なわれる制御の度合いが、前記目標値を下回るエラー信号において大きい、請求項98に記載の換気支援を行なうための装置。
【請求項101】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項98に記載の換気支援を行なうための装置。
【請求項102】
自発呼吸する患者に対する換気支援を行なうための方法であって
患者の換気量を決定するステップと、
決定された換気量から、目標値と比べた絶対又は相対換気量エラーのいずれかを計算するステップと、
換気量エラーと換気量エラーに伴って増大するゲインとの積の関数である圧力サポート振幅を得るステップと、
前記圧力サポート振幅の関数である圧力で患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項103】
前記目標値を上回る患者換気量において、ゲインが、前記目標値を下回る対応する患者換気量におけるゲインよりも小さい、請求項102に記載の換気支援を行なうための方法。
【請求項104】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項102に記載の換気支援を行なうための方法。
【請求項105】
前記圧力サポート振幅が変化する速度が、換気量エラーの大きさ及び符号の両方の関数である、請求項102に記載の換気支援を行なうための方法。
【請求項106】
前記圧力サポート振幅が変化する速度が、前記目標値を上回る換気量エラーにおけるよりも前記目標値を下回る換気量エラーにおいて高速となるように制御される、請求項102に記載の換気支援を行なうための方法。
【請求項107】
自発呼吸する患者に対する換気支援を行なうための装置であって、患者の換気量を決定し、決定された換気量から、目標値と比べた絶対又は相対換気量エラーのいずれかを計算するとともに、換気量エラーと換気量エラーに伴って増大するゲインとの積の関数である圧力サポート振幅を取得するためのコントローラと、 前記圧力サポート振幅の関数である圧力で患者に対してエアーを供給するためのブロワとを備える装置。
【請求項108】
前記目標値を上回る患者換気量において、ゲインが、前記目標値を下回る対応する患者換気量におけるゲインよりも小さい、請求項107に記載の換気支援を行なうための装置。
【請求項109】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項107に記載の換気支援を行なうための装置。
【請求項110】
前記圧力サポート振幅が変化する速度が、換気量エラーの大きさ及び符号の両方の関数である、請求項107に記載の換気支援を行なうための装置。
【請求項111】
前記圧力サポート振幅が変化する速度が、前記目標値を上回る換気量エラーにおけるよりも前記目標値を下回る換気量エラーにおいて高速となるように制御される、請求項107に記載の換気支援を行なうための装置。
【請求項1】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
現在の呼吸サイクルの位相を決定するステップと、
(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅と、(c)前記差分測定値の大きさに応じて変化するゲイン係数との積の関数である圧力で、患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項2】
前記ゲイン係数が前記差分測定値の大きさと共に増大する、請求項1に記載の換気支援を行なうための方法。
【請求項3】
前記目標値の上下で差分測定値が等しい場合、ゲイン係数が、前記目標値を下回る差分測定値において大きい、請求項2に記載の換気支援を行なうための方法。
【請求項4】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項3に記載の換気支援を行なうための方法。
【請求項5】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項1に記載の換気支援を行なうための方法。
【請求項6】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項5に記載の換気支援を行なうための方法。
【請求項7】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項1に記載の換気支援を行なうための方法。
【請求項8】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項1に記載の換気支援を行なうための方法。
【請求項9】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項10】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項9に記載の換気支援を行なうための方法。
【請求項11】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項9に記載の換気支援を行なうための方法。
【請求項12】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項9に記載の換気支援を行なうための方法。
【請求項13】
自発呼吸する患者に対する換気支援を行なうための方法において、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量と目標値との間の差分を決定するステップと、
患者に対してエアーを供給することにより前記差分に応答するサーボ制御ループでブロワを使用するステップであって、前記サーボ制御ループが前記差分の大きさと共に増大するゲインを有するステップと、
を備える方法。
【請求項14】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項13に記載の換気支援を行なうための方法。
【請求項15】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項13に記載の換気支援を行なうための方法。
【請求項16】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分のいずれかの極性において、供給されるエアーの圧力が、前記差分を減らす傾向にあるそれぞれの方向で変えられる、請求項13に記載の換気支援を行なうための方法。
【請求項17】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するステップと、
現在の呼吸サイクルの位相を決定するステップと、
(a)前記差分測定値と、(b)通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅との積の関数である圧力で、患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項18】
エアーが、前記差分測定値に応答するサーボ制御ループでブロワを使用することにより前記患者に対して供給され、前記サーボ制御ループが前記差分測定値の大きさと共に増大するゲインを有する、請求項17に記載の換気支援を行なうための方法。
【請求項19】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項18に記載の換気支援を行なうための方法。
【請求項20】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項17に記載の換気支援を行なうための方法。
【請求項21】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項20に記載の換気支援を行なうための方法。
【請求項22】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項17に記載の換気支援を行なうための方法。
【請求項23】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
を備える方法。
【請求項24】
前記サーボ制御ループが、前記差分の大きさと共に増大するゲインを有する、請求項23に記載の換気支援を行なうための方法。
【請求項25】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項24に記載の換気支援を行なうための方法。
【請求項26】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項23に記載の換気支援を行なうための方法。
【請求項27】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
エラー信号を得るために、呼吸気流量の関数と目標値との間の差分を積分するステップと、
現在の呼吸サイクルの位相を決定するステップと、
患者に対して供給されるエアーの圧力をサーボ制御するためにエラー信号を使用するステップと、
通常の呼吸サイクルに適した振幅−位相テンプレートを使用し、更に、現在の呼吸サイクルの決定された位相におけるテンプレート振幅にしたがって、患者に対して供給されるエアーの圧力を制御するステップと、
前記エラー信号の大きさにしたがってサーボ制御のゲインを調整するステップと、
を備える方法。
【請求項28】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項27に記載の換気支援を行なうための方法。
【請求項29】
前記目標値の上下でエラー信号が等しい場合、ゲインが、前記目標値を下回るエラー信号において大きい、請求項28に記載の換気支援を行なうための方法。
【請求項30】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項29に記載の換気支援を行なうための方法。
【請求項31】
現在の呼吸サイクルの位相が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けるステップにより決定される、請求項27に記載の換気支援を行なうための方法。
【請求項32】
前記関連付けるステップが、ファジー理論規則の組の適用を含む、請求項31に記載の換気支援を行なうための方法。
【請求項33】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項27に記載の換気支援を行なうための方法。
【請求項34】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項27に記載の換気支援を行なうための方法。
【請求項35】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
エラー信号を得るために、呼吸気流量の関数と目標値との間の差分を積分するステップと、
患者に対して供給されるエアーの圧力をサーボ制御するためにエラー信号を使用するステップと、
前記エラー信号の大きさにしたがってサーボ制御のゲインを調整するステップと、
を備える方法。
【請求項36】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項35に記載の換気支援を行なうための方法。
【請求項37】
前記目標値の上下でエラー信号が等しい場合、ゲインが、前記目標値を下回るエラー信号において大きい、請求項36に記載の換気支援を行なうための方法。
【請求項38】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項37に記載の換気支援を行なうための方法。
【請求項39】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項35に記載の換気支援を行なうための方法。
【請求項40】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項35に記載の換気支援を行なうための方法。
【請求項41】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、
前記差分測定値の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、また、前記差分測定値の大きさに応じて変化するゲイン係数で、ブロワにより患者に対してエアーを供給させる制御機構と、
を備える装置。
【請求項42】
前記ゲイン係数が前記差分測定値の大きさと共に増大する、請求項41に記載の換気支援を行なうための装置。
【請求項43】
前記目標値の上下で差分測定値が等しい場合、ゲイン係数が、前記目標値を下回る差分測定値において大きい、請求項42に記載の換気支援を行なうための装置。
【請求項44】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項43に記載の換気支援を行なうための装置。
【請求項45】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項41に記載の換気支援を行なうための装置。
【請求項46】
前記処理手段がファジー理論規則の組を利用する、請求項45に記載の換気支援を行なうための装置。
【請求項47】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性においては、前記制御機構により、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項41に記載の換気支援を行なうための装置。
【請求項48】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項41に記載の換気支援を行なうための装置。
【請求項49】
自発呼吸する患者に対する換気支援を行なうための装置において、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための処理手段と、
前記差分測定値の関数である圧力でブロワにより患者に対してエアーを供給させる制御機構であって、そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用する制御機構と、
を備える装置。
【請求項50】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいゲインを使用する、請求項49に記載の換気支援を行なうための装置。
【請求項51】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項49に記載の換気支援を行なうための装置。
【請求項52】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性においては、前記制御機構により、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項49に記載の換気支援を行なうための装置。
【請求項53】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するとともに、現在の呼吸サイクルの位相を決定する処理手段と、
前記差分測定値の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、ブロワにより患者に対してエアーを供給させるための制御機構と、
を備える装置。
【請求項54】
前記制御機構が、前記差分測定値に応答するサーボ制御ループでブロワを使用することにより前記患者に対してエアーを供給させ、前記サーボ制御ループが前記差分測定値の大きさと共に増大するゲインを有する、請求項53に記載の換気支援を行なうための装置。
【請求項55】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいループゲインを使用する、請求項54に記載の換気支援を行なうための装置。
【請求項56】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項53に記載の換気支援を行なうための装置。
【請求項57】
前記処理手段がファジー理論規則の組を適用する、請求項53に記載の換気支援を行なうための方法。
【請求項58】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、前記ブロワが、前記差分測定値を減らす傾向にあるそれぞれの方向で変化する圧力でエアーを供給する、請求項53に記載の換気支援を行なうための装置。
【請求項59】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と、患者の生理学的死腔を考慮に入れる肺胞換気量である目標値との間の差分の測定値を計算するための処理手段と、
前記差分測定値の関数である圧力でブロワにより患者に対してエアーを供給させるための制御機構と、
を備える装置。
【請求項60】
前記制御機構が、そのゲインが前記差分測定値の大きさと共に増大するサーボ制御ループを作動させる、請求項59に記載の換気支援を行なうための装置。
【請求項61】
前記目標値を上回る呼吸気流量において、前記制御機構が、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さいループゲインを使用する、請求項60に記載の換気支援を行なうための装置。
【請求項62】
前記差分測定値が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、前記ブロワが、前記差分測定値を減らす傾向にあるそれぞれの方向で変化する圧力でエアーを供給する、請求項59に記載の換気支援を行なうための装置。
【請求項63】
自発呼吸する患者に対する換気支援を行なうための装置であって、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値であるエラー信号を得るとともに、現在の呼吸サイクルの位相を決定するための処理手段と、
前記エラー信号の関数である圧力で、通常の呼吸サイクルに適した振幅−位相テンプレートの現在の呼吸サイクルの決定された位相における振幅で、ブロワにより患者に対してエアーを供給させるためのサーボ制御機構と、
を備え、
前記サーボ制御機構が、前記エラー信号の大きさにしたがってそのゲインを調整する装置。
【請求項64】
前記ゲインが前記エラー信号の大きさと共に増大する、請求項63に記載の換気支援を行なうための装置。
【請求項65】
前記目標値の上下でエラー信号が等しい場合、前記ゲインが、前記目標値を下回るエラー信号において大きい、請求項64に記載の換気支援を行なうための装置。
【請求項66】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項65に記載の換気支援を行なうための装置。
【請求項67】
前記処理手段が、呼吸気流量及びその変化率を通常の呼吸サイクルの異なる位相に対して関連付けることにより、現在の呼吸サイクルの位相を決定する、請求項63に記載の換気支援を行なうための装置。
【請求項68】
前記処理手段がファジー理論規則の組を適用する、請求項67に記載の換気支援を行なうための装置。
【請求項69】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記差分測定値のいずれかの極性において、供給されるエアーの圧力が、前記差分測定値を減らす傾向にあるそれぞれの方向で変えられる、請求項63に記載の換気支援を行なうための装置。
【請求項70】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項63に記載の換気支援を行なうための装置。
【請求項71】
自発呼吸する患者に対する換気支援を行なうための装置であって、
エラー信号を得るために呼吸気流量の関数と目標値との間の差分を積分するための手段と、
前記エラー信号に応答して、患者に対して供給されるエアーの圧力を制御するためのサーボ手段と、
を備え、
前記サーボ手段が、前記エラー信号の大きさにしたがってそのゲインを調整する装置。
【請求項72】
前記サーボ手段が、前記エラー信号の大きに伴ってそのゲインを増大する、請求項71に記載の換気支援を行なうための装置。
【請求項73】
前記目標値の上下でエラー信号が等しい場合、前記サーボ手段が、前記目標値を上回るエラー信号においてよりも前記目標値を下回るエラー信号において大きいゲインを使用する、請求項72に記載の換気支援を行なうための装置。
【請求項74】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項71に記載の換気支援を行なうための装置。
【請求項75】
前記エラー信号が、呼吸気流量引く前記目標値のクリップされた積分であり、前記エラー信号のいずれかの極性において、供給されるエアーの圧力が、前記エラー信号を減らす傾向にあるそれぞれの方向で変えられる、請求項71に記載の換気支援を行なうための装置。
【請求項76】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項71に記載の換気支援を行なうための装置。
【請求項77】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
過換気の状態においてよりも過小換気の状態において積極的にゲインを変化させるステップと、
を連続的に繰り返すことを備える方法。
【請求項78】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項77に記載の換気支援を行なうための方法。
【請求項79】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項77に記載の換気支援を行なうための方法。
【請求項80】
前記差分測定値が、実際の換気量と目標換気量との間の差を目標換気量で割ったものに比例する相対換気量エラーの関数である、請求項77に記載の換気支援を行なうための方法。
【請求項81】
前記圧力が流量トリガされて位相循環される、請求項77に記載の換気支援を行なうための方法。
【請求項82】
自発呼吸する患者に対する換気支援を行なうための方法であって、
呼吸気流量を決定するステップと、
所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するステップと、
そのゲインが前記差分測定値の大きさに応じて変化するサーボ制御ループでブロワを使用することにより、前記差分測定値の関数である圧力で患者に対してエアーを供給するステップと、
患者が過小換気されている場合よりも患者が過換気されている場合において換気量サポートを緩やかに引き下げることができるようにゲインを変化させるステップと、
を連続的に繰り返すことを備える方法。
【請求項83】
前記目標値を上回る呼吸気流量において、ゲインが、前記目標値を下回る対応する呼吸気流量におけるゲインよりも小さい、請求項82に記載の換気支援を行なうための方法。
【請求項84】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項82に記載の換気支援を行なうための方法。
【請求項85】
前記圧力が流量トリガされて位相循環される、請求項82に記載の換気支援を行なうための方法。
【請求項86】
自発呼吸する患者に対する換気支援を行なうための方法であって、
一方が高速で他方が低速である異なる応答速度で2つの患者換気量測定値を決定するステップと、
目標値と2つの患者換気量測定値のうちの対応するそれぞれの測定値との関数である2つのエラー信号を得るステップと、
2つのエラー信号に対応する2つの制御応答を得るステップと、
前記エラー信号のうちの対応するエラー信号の大きさ及び符号にしたがって前記各制御応答を調整することにより、高速換気量におけるエラーに対する制御応答が低速換気量測定値におけるエラーに対する制御応答よりも積極的となるようにするステップと、
高速応答換気量測定値が目標値よりも益々小さくなるにつれて、低速換気量測定値に対する制御応答よりも高速換気量測定値に対する制御応答に益々有利に働くように、両方の制御応答を組み合わせて全制御応答を生成するステップと、
前記全制御応答を使用して、患者に対して供給されるエアーの圧力を制御するステップと、
を連続的に繰り返すことを備える方法。
【請求項87】
制御の度合いが、前記エラー信号の大きさに伴って増大する、請求項86に記載の換気支援を行なうための方法。
【請求項88】
前記目標値の上下でエラー信号が等しい場合、制御の度合いが、前記目標値を下回るエラー信号において大きい、請求項87に記載の換気支援を行なうための方法。
【請求項89】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項86に記載の換気支援を行なうための方法。
【請求項90】
自発呼吸する患者に対する換気支援を行なうための装置であって、呼吸器流量を決定するとともに、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための制御機構と、前記差分測定値の関数である圧力で患者に対してエアーを供給するためのサーボ制御ブロワとを備え、前記圧力が前記差分測定値の大きさによって決まり、前記ブロワが、過換気の状態においてよりも過小換気の状態において積極的に圧力を変化させる装置。
【請求項91】
前記目標値を上回る呼吸気流量において、圧力が、前記目標値を下回る対応する呼吸気流量における場合よりも積極的に変化しない、請求項90に記載の換気支援を行なうための装置。
【請求項92】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項90に記載の換気支援を行なうための装置。
【請求項93】
前記差分測定値が、実際の換気量と目標換気量との間の差を目標換気量で割ったものに比例する相対換気量エラーの関数である、請求項90に記載の換気支援を行なうための装置。
【請求項94】
前記圧力が流量トリガされて位相循環される、請求項90に記載の換気支援を行なうための装置。
【請求項95】
自発呼吸する患者に対する換気支援を行なうための装置であって、呼吸器流量を決定するとともに、所定の時間にわたる呼吸気流量の関数と目標値との間の差分の測定値を計算するための制御機構と、前記差分測定値の関数である圧力で患者に対してエアーを供給するためのサーボ制御ブロワとを備え、前記圧力が前記差分測定値の大きさによって決まり、前記ブロワが、患者が過小換気されている場合よりも患者が過換気されている場合において換気量サポートを緩やかに引き下げることができる装置。
【請求項96】
前記目標値を上回る呼吸気流量において、ブロワが、前記目標値を下回る対応する呼吸気流量において行なうよりもゆっくりと圧力変化を行なう、請求項95に記載の換気支援を行なうための装置。
【請求項97】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項95に記載の換気支援を行なうための装置。
【請求項98】
自発呼吸する患者に対する換気支援を行なうための装置であって、一方が高速で他方が低速である異なる応答速度で2つの患者換気量測定値を決定し、目標値と2つの患者換気量測定値のうちの対応するそれぞれの測定値との関数である2つのエラー信号を取得し、2つのエラー信号に対応する2つの制御応答を取得し、前記エラー信号のうちの対応するエラー信号の大きさ及び符号にしたがって前記各制御応答を調整することにより、高速換気量測定値におけるエラーに対する制御応答が低速換気量測定値におけるエラーに対する制御応答よりも積極的となるようにし、また、高速応答換気量測定値が目標値よりも益々小さくなるにつれて、低速換気量測定値に対する制御応答よりも高速換気量測定値に対する制御応答に益々有利に働くように、両方の制御応答を組み合わせて全制御応答を生成する制御機構と、前記全制御応答に応答して、患者に対して供給されるエアーの圧力を制御するブロワとを備える装置。
【請求項99】
前記ブロワによって行なわれる制御の度合いが、前記エラー信号の大きさに伴って増大する、請求項98に記載の換気支援を行なうための装置。
【請求項100】
前記目標値の上下でエラー信号が等しい場合、前記ブロワによって行なわれる制御の度合いが、前記目標値を下回るエラー信号において大きい、請求項98に記載の換気支援を行なうための装置。
【請求項101】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項98に記載の換気支援を行なうための装置。
【請求項102】
自発呼吸する患者に対する換気支援を行なうための方法であって
患者の換気量を決定するステップと、
決定された換気量から、目標値と比べた絶対又は相対換気量エラーのいずれかを計算するステップと、
換気量エラーと換気量エラーに伴って増大するゲインとの積の関数である圧力サポート振幅を得るステップと、
前記圧力サポート振幅の関数である圧力で患者に対してエアーを供給するステップと、
を連続的に繰り返すことを備える方法。
【請求項103】
前記目標値を上回る患者換気量において、ゲインが、前記目標値を下回る対応する患者換気量におけるゲインよりも小さい、請求項102に記載の換気支援を行なうための方法。
【請求項104】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項102に記載の換気支援を行なうための方法。
【請求項105】
前記圧力サポート振幅が変化する速度が、換気量エラーの大きさ及び符号の両方の関数である、請求項102に記載の換気支援を行なうための方法。
【請求項106】
前記圧力サポート振幅が変化する速度が、前記目標値を上回る換気量エラーにおけるよりも前記目標値を下回る換気量エラーにおいて高速となるように制御される、請求項102に記載の換気支援を行なうための方法。
【請求項107】
自発呼吸する患者に対する換気支援を行なうための装置であって、患者の換気量を決定し、決定された換気量から、目標値と比べた絶対又は相対換気量エラーのいずれかを計算するとともに、換気量エラーと換気量エラーに伴って増大するゲインとの積の関数である圧力サポート振幅を取得するためのコントローラと、 前記圧力サポート振幅の関数である圧力で患者に対してエアーを供給するためのブロワとを備える装置。
【請求項108】
前記目標値を上回る患者換気量において、ゲインが、前記目標値を下回る対応する患者換気量におけるゲインよりも小さい、請求項107に記載の換気支援を行なうための装置。
【請求項109】
前記目標値が、患者の生理学的死腔を考慮に入れる肺胞換気量である、請求項107に記載の換気支援を行なうための装置。
【請求項110】
前記圧力サポート振幅が変化する速度が、換気量エラーの大きさ及び符号の両方の関数である、請求項107に記載の換気支援を行なうための装置。
【請求項111】
前記圧力サポート振幅が変化する速度が、前記目標値を上回る換気量エラーにおけるよりも前記目標値を下回る換気量エラーにおいて高速となるように制御される、請求項107に記載の換気支援を行なうための装置。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−87966(P2011−87966A)
【公開日】平成23年5月6日(2011.5.6)
【国際特許分類】
【出願番号】特願2011−259(P2011−259)
【出願日】平成23年1月4日(2011.1.4)
【分割の表示】特願2006−540092(P2006−540092)の分割
【原出願日】平成16年11月25日(2004.11.25)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
【公開日】平成23年5月6日(2011.5.6)
【国際特許分類】
【出願日】平成23年1月4日(2011.1.4)
【分割の表示】特願2006−540092(P2006−540092)の分割
【原出願日】平成16年11月25日(2004.11.25)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
[ Back to top ]