
噛合チェーン式垂直搬送機
【課題】被搬送物を装置設置面に平行な4方向に搬入出すると同時に昇降テーブルの横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送と省スペース化を実現するとともに、昇降領域の清掃作業や昇降部品の交換作業などの簡便な保守メンテナンス作業を実現する噛合チェーン式垂直搬送機を提供すること。
【解決手段】ワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120とを備えるとともに、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅方向のそれぞれに配置され、ガイドレール150に沿って転動するガイドローラ160がガイドレール150に当接した状態で昇降テーブル111の四隅のそれぞれに配置されている噛合チェーン式垂直搬送機100。
【解決手段】ワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120とを備えるとともに、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅方向のそれぞれに配置され、ガイドレール150に沿って転動するガイドローラ160がガイドレール150に当接した状態で昇降テーブル111の四隅のそれぞれに配置されている噛合チェーン式垂直搬送機100。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種製造分野の製造設備、運輸分野の移送設備などに用いてワークを昇降させる垂直搬送機であって、特に、噛合チェーンを昇降動作の駆動媒体として採用した噛合チェーン式垂直搬送機に関する。
【背景技術】
【0002】
従来、垂直搬送機として、下階から上階まで貫通して設けたフレームの内部に箱型のキャリッジが条体により保持され、モータにより駆動してキャリッジを昇降させるもの(例えば、特許文献1参照。)や、ガイドローラの駆動時に生じる騒音が低減された垂直連続搬送装置における荷受台(例えば、特許文献2参照。)がある。
また、搬送対象である物品の搬送方向を上下方向に切り替えて仕分けする縦仕分装置がある(例えば、特許文献3参照。)。
また、相互に向かい合う2方向にコンベヤから製品を搬送して仕分けする仕分けシステムがある(例えば、特許文献4参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実公平8−3386号公報(特許請求の範囲、図1)
【特許文献2】特表2008−514524号公報(特許請求の範囲、図1)
【特許文献3】特開2007−290804号公報(特許請求の範囲、図1)
【特許文献4】特開2004−051368号公報(特許請求の範囲、図3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1乃至特許文献4のそれぞれに開示された各装置では、被搬送物であるワークの搬送方向または仕分け方向がいずれも2方向であるため、装置の設置面に平行な仮想平面内で相互に異なる4方向にワークを搬入出させて仕分けすることが困難であるという問題点があった。
また、特許文献1に開示された縦仕分装置では、被搬送物であるワークの搬送方向を上下方向に変更する際に上部コンベヤベルトおよび下部コンベヤベルト相互の高さの違いに起因してこれらコンベヤベルト間に生じた段差部を物品が滑り落ちるため、ワークが段差部を滑り落ちる際に衝撃が加わって物品が破損してしまうおそれがあるという問題点があった。
加えて、ワークを搬入出する方向を変換する変換機構を装置内の限られたスペース内に設けた場合、変換機構にワークが接触してワークを破損させてしまうおそれがあるという問題点があった。
また、このような縦仕分装置で段差部を無くそうとするとコンベヤベルト相互間のスロープを小さくするための機構を設ける必要が生じるため、縦仕分装置内においてこれらコンベヤなどを設置する設置スペースが大きくなり装置の大型化を回避することが困難になるという問題点があった。
【0005】
また、特許文献3に開示された垂直搬送機は、キャリッジをワイヤーチェーンなどの条体で吊り下げてモータにより昇降駆動させているため、ワイヤーチェーンなどの条体が過度に伸びる可能性があり、モータの回転数を制御してもキャリッジの停止位置がずれて搬送作業に支障をきたすという問題点があった。
【0006】
そして、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、条体が装置フレーム内で複雑に取り回されており、日常時における昇降領域の清掃作業や長期使用した条体の交換作業が煩雑になるという問題点があるとともに、搬送スペースの他にワイヤーチェーンなどの条体を取り回すスペースなどが必要となり、装置全体の大型化を回避できないという問題点があった。
【0007】
また、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、チェーン潤滑油が搬送時の振動により飛散し、ワークを汚染することがあり、このようなワークの汚染を防止するために汚染防止用カバーなどを付設すると、設置スペースが拡大するばかりでなく、汚染防止用カバーの重量分だけ搬送負荷が増大するという問題点があった。
【0008】
さらに、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、チェーンの噛み外れがワイヤーチェーンなどの条体に対して横揺れと縦揺れを惹起させて、昇降搬送時に搭載したワークが不安定になるという問題点があった。
【0009】
そこで、本発明は、従来の問題点を解決するものであって、すなわち、本発明の目的は、被搬送物であるワークを装置の設置面に平行な4方向に搬入出すると同時に昇降テーブルの横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送と省スペース化を実現するとともに、搬送負荷の増大および装置の大型化を回避すると同時に昇降領域の清掃作業や昇降部品の交換作業などの簡便な保守メンテナンス作業を実現する噛合チェーン式垂直搬送機を提供することである。
【課題を解決するための手段】
【0010】
請求項1に係る本発明は、矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに前記昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、該ワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで前記昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、該一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、該駆動スプロケットに駆動力を供給する駆動モータとを備えた噛合チェーン式垂直搬送機であって、前記ワーク搭載ユニットを誘導案内する複数のガイドレールが前記昇降テーブルの四隅にそれぞれ立設されているとともに、前記ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置されていることにより、前述した課題を解決したものである。
【0011】
請求項2に係る本発明は、請求項1に記載の構成に加えて、前記ガイドローラが、前記昇降テーブルの上下面近傍に複数設けられていることにより、前述した課題を解決したものである。
【0012】
請求項3に係る本発明は、請求項1または請求項2に記載の構成に加えて、前記ガイドレールに当接するガイドローラの設置方向が、前記一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることにより、前述した課題を解決したものである。
【0013】
請求項4に係る本発明は、請求項1乃至請求項3のいずれかに記載の構成に加えて、前記駆動スプロケットが、前記一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることにより、前述した課題を解決したものである。
【0014】
請求項5に係る本発明は、請求項1乃至請求項4のいずれかに記載の構成に加えて、前記駆動スプロケットが、前記一対の噛合チェーンの一方に設けられていることにより、前述した課題を解決したものである。
【0015】
請求項6に係る本発明は、請求項1乃至請求項5のいずれかに記載の構成に加えて、前記駆動モータが、サーボモータであることにより、前述した課題を解決したものである。
【0016】
請求項7に係る本発明は、請求項1乃至請求項6のいずれかに記載の構成に加えて、前記一対の噛合チェーン、駆動スプロケットおよび駆動モータが、前記昇降テーブルの垂直投影面内に配置されていることにより、前述した課題を解決したものである。
【発明の効果】
【0017】
請求項1に係る本発明の噛合チェーン式垂直搬送機によれば、矩形状の平面形状を有する昇降テーブルおよびこの昇降テーブル上に配置されてワークを搭載するとともに昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、このワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、この一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、この駆動スプロケットに駆動力を供給する駆動モータとを備えていることによって、ワーク搭載ユニットの垂直位置における停止位置を変更して昇降テーブルの前後左右いずれであってもワークを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークについて高さ方向の位置を変更して昇降テーブルの前後左右方向、すなわち4方向のそれぞれにワークを搬入出させて仕分けすることができる。
さらに、一対の噛合チェーンが相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニットの最上昇位置を設定するとともに一対の噛合チェーンが相互に噛み外れて分岐する直前位置までワーク搭載ユニットの最下降位置を設定するため、ワーク搭載ユニットの昇降ストロークを最大限に発揮して垂直方向におけるワークの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークの破損を回避することができる。
【0018】
また、昇降テーブルの底面下部領域内に一対の噛合チェーンや駆動スプロケットや駆動モータが配置されるため、装置サイズが大型化することを回避するとともに昇降テーブルの上面領域内における清掃作業や昇降テーブルの底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避することができる。
また、ワーク搭載ユニットを誘導案内する複数のガイドレールが昇降テーブルの四隅にそれぞれ立設されているとともに、ガイドレールに沿って転動するガイドローラが昇降テーブルの四隅に対向して配置されていることにより、一対の噛合チェーンで昇降するワーク搭載ユニットが複数のガイドレールでそれぞれ誘導案内されるため、ワーク搭載ユニットに生じがちな横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送を実現し、また、ガイドローラがガイドレールに当接した状態でガイドに沿って転動走行するため、ワーク搭載ユニットの横揺れを抑制してワーク搭載ユニットを円滑に昇降させることができる。
【0019】
そして、請求項2に係る噛合チェーン式垂直搬送機によれば、請求項1に記載の噛合チェーン式垂直搬送機が奏する効果に加えて、ガイドローラが、昇降テーブルの上下面近傍に複数設けられていることにより、ワーク搭載ユニットが傾かないようにより確実に垂直方向に案内されるため、ワーク搭載ユニットに生じがちな左右前後の横揺れを完全かつ確実に回避することができる。
【0020】
そして、請求項3に係る噛合チェーン式垂直搬送機によれば、請求項1または請求項2に記載の噛合チェーン式垂直搬送機が奏する効果に加えて、ガイドレールに当接するガイドローラの設置方向が、一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることにより、ガイドレールとガイドローラとの当接状態でワーク搭載ユニットに生じがちな左右前後のいずれか一方の横揺れを回避し、一対の噛合チェーンの噛み合わせでワーク搭載ユニットに生じがちな左右前後の他方の横揺れを回避するため、ワーク搭載ユニットに生じがちな左右前後の横揺れを完全かつ確実に回避することができる。
【0021】
また、請求項4に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項3の何れか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動スプロケットが、一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることにより、剛直化した一対の噛合チェーンに対して駆動スプロケットが噛み合って、所謂、ピニオンラック機構を呈するため、チェーン分岐方向からチェーン噛合方向へ偏向駆動される偏向位置で噛合チェーンを駆動スプロケットに巻き掛けた場合に駆動スプロケットと噛合チェーンとの間で生じる周知のコーダルアクション(多角形運動)の発生が回避され、このコーダルアクションに起因した上下動(脈動)、振動、騒音、速度変動の発生を防止でき、ワークの安定した昇降駆動を実現することができる。
【0022】
請求項5に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項4のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動スプロケットが一対の噛合チェーンの一方に設けられていることにより、一対の噛合チェーンの両方に昇降用スプロケットをそれぞれ設置する噛合チェーン式垂直搬送機と比較して装置全体の部品点数が低減するため、装置構成を簡素化して他構成部材の設計や装置全体の設置場所等に関する高い自由度を確保できるとともに、装置組立および保守メンテナンスに係る作業負担をより低減することができる。
【0023】
また、一対の噛合チェーンの両方に駆動スプロケットをそれぞれ設置した噛合チェーン式垂直搬送機において生じがちな一対の駆動スプロケット間の回転位相ズレに起因した一対の噛合チェーン間の噛合振動の発生を回避するため、ワークの安定した昇降動作を実現することができる。
【0024】
そして、請求項6に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項5のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動モータがサーボモータであることにより、サーボモータの回転数が簡便に制御可能となるため、ワーク搭載ユニットの昇降範囲や停止位置を自由かつ正確に制御して搬送先である他のコンベヤとワーク搭載ユニットとの間に段差が生じることを確実に回避することができる。
【0025】
さらに、請求項7に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項6のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、一対の噛合チェーンと駆動スプロケットと駆動モータが昇降テーブルの垂直投影面内に配置されていることにより、昇降テーブルの底面下部領域内に一対の噛合チェーンや駆動スプロケットや駆動モータを設置することが可能になるため、省スペース化を実現することができる。
【図面の簡単な説明】
【0026】
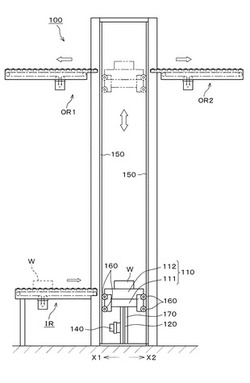
【図1】本発明の一実施例である噛合チェーン式垂直搬送機の正面図。
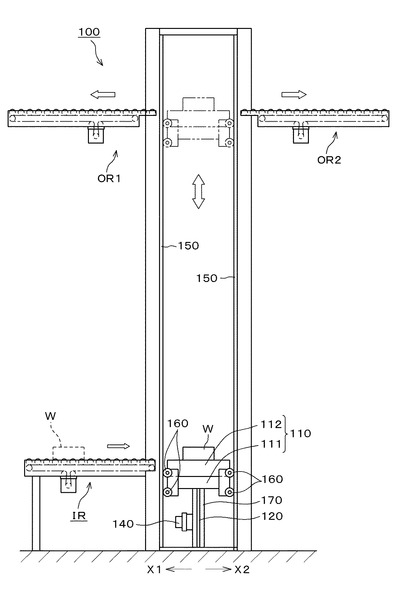
【図2】図1に示す噛合チェーン式垂直搬送機の側面図。
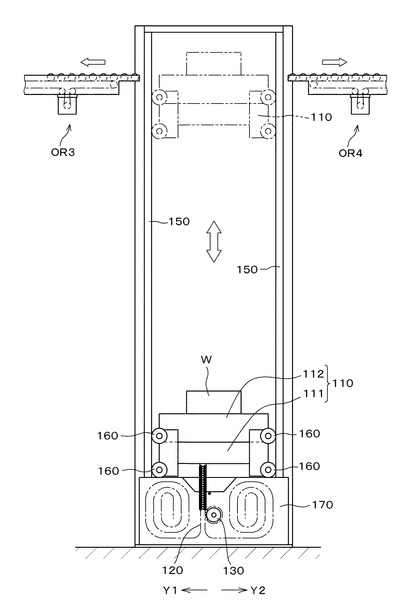
【図3】図1に示す噛合チェーン式垂直搬送機の平面図。
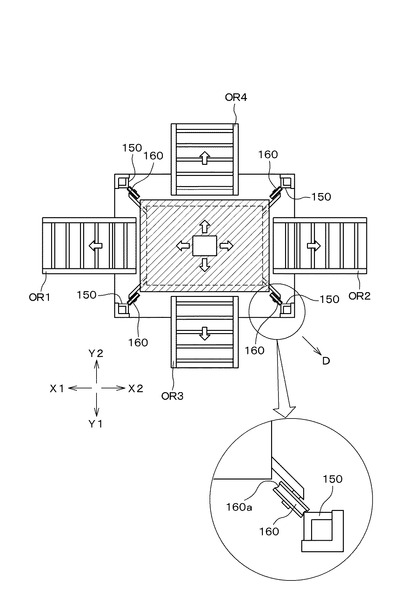
【図4】図1に示す噛合チェーン式垂直搬送機の搬送動作を示した概念図。
【図5】噛合チェーンの分解組み立て状態と噛み外れ状態を示す斜視図。
【図6】駆動スプロケット近傍の斜視図。
【図7】噛合チェーンの噛み外れ状態の概略図。
【図8】ガイドレールに対するガイドローラの当接状態を示す図。
【図9】ワーク搬入出機構を表面からみた概要説明図。
【発明を実施するための形態】
【0027】
本発明の噛合チェーン式垂直搬送機は、矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、このワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、この一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、この駆動スプロケットに駆動力を供給する駆動モータとを備え、ワーク搭載ユニットを誘導案内する複数のガイドレールが昇降テーブルの四隅にそれぞれ立設されているとともに、ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置され、3次元的にみてワークの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークについて高さ方向の位置を変更してワークを前後左右の4方向のそれぞれに搬入出させて仕分けすると同時にワーク搭載ユニットの昇降ストロークを最大限に発揮して垂直方向におけるワークの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークの破損を回避し、装置サイズが大型化することを回避すると同時に昇降テーブルの上面領域内における清掃作業や昇降テーブルの底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避し、ワーク搭載ユニットに生じがちな横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送を実現し、また、ワーク搭載ユニットの横揺れを抑制してワーク搭載ユニットを円滑に昇降させるものであれば、その具体的な実施の態様は、如何なるものであっても何ら構わない。
【0028】
たとえば、本発明の噛合チェーン式垂直搬送機は、ワークを搭載する昇降テーブルを下部位置と上部位置との間で垂直搬送することが可能であれば、如何なる装置レイアウトであっても良く、例えば、下部位置に連接した搬入側コンベヤなどのワーク搬入側から搬入したワークを上昇させて垂直搬送した後に、昇降テーブルの前後左右のそれぞれの側に連接した搬出側コンベヤなどのワーク搬出側へ搬出するもの、もしくは、その逆にワークを下降させて垂直搬送するものなどのいずれであっても適用することができる。
【0029】
そして、本発明の噛合チェーン式垂直搬送機で用いられる一対の噛合チェーンは、一対の駆動スプロケットにより相互に噛み合わせて一体化するとともに一対の駆動スプロケットにより相互に噛み外れて分岐するものであれば、その具体的なチェーン形態は如何なるものであっても良く、例えば、チェーン幅方向に1列の単列であるもの、チェーン幅方向に2列以上の複列であるものなど何れであっても構わないが、チェーン幅方向に2列以上の複列であるものを採用する場合には、一対の噛合チェーンの一方を構成するフック状外歯プレートとフック状内歯プレートが、これに対向する他方の噛合チェーンを構成するフック状外歯プレートとフック状内歯プレートに対してチェーン幅方向の複列に亙ってそれぞれフック状に多重かつ強固に噛み合うため、噛合チェーンのチェーン幅方向に生じがちな座屈を確実に抑制して優れたチェーン耐久性を実現することができるので、より好ましい。
【0030】
また、本発明の噛合チェーン式垂直搬送機で用いられる一対の噛合チェーンは、ローラを有していないもの、すなわち、ブシュのみを有するもの、ローラを有するものなど何れであっても構わないが、ブシュのみを有するものを採用する場合には、チェーン部品点数が低減して、チェーン重量の軽量化を図ることができる。
【0031】
さらに、本発明の噛合チェーン式垂直搬送機で用いられるワーク搬入出機構の具体的な形態については、搬入側コンベヤや搬出側コンベヤとの乗り継ぎ時に支障が少ない矩形の搭載面を備えたものが好ましい。
【実施例】
【0032】
以下、本発明の一実施例である噛合チェーン式垂直搬送機100を図面に基づいて説明する。
ここで、図1は、本発明の一実施例である噛合チェーン式垂直搬送機の正面図であり、図2は、図1に示す噛合チェーン式垂直搬送機の側面図であり、図3は、図1に示す噛合チェーン式垂直搬送機の平面図であり、図4は、図1に示す噛合チェーン式垂直搬送機の搬送動作を示した概念図であり、図5は、噛合チェーンの分解組み立て状態と噛み外れ状態を示す斜視図であり、図6は、駆動スプロケット近傍の斜視図であり、図7は、噛合チェーンの噛み外れ状態の概略図であり、図8は、ガイドレールに対するガイドローラの当接状態を示す図であり、図9は、ワーク搬入出機構を表面からみた概要説明図である。
【0033】
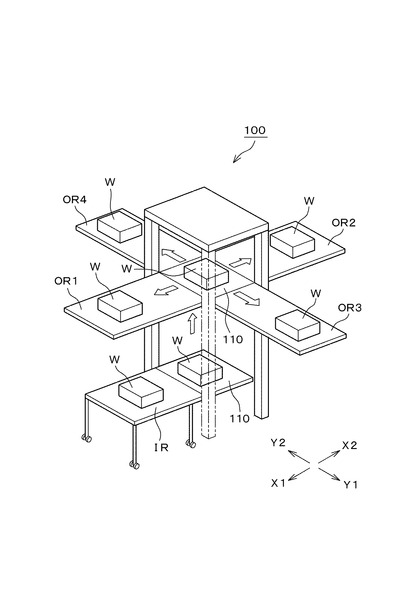
本発明の一実施例である噛合チェーン式垂直搬送機100は、各種製造分野の製造設備、運輸分野の移送設備などに用いるものであって、図1乃至図4に示すように、下部位置の搬入側ロールコンベヤIRから搬入された重量物などのワークWをワーク搭載ユニット110に搭載し、このワーク搭載ユニット110を作業エリアの設置面に対して昇降させて垂直搬送し、ワーク搭載ユニット110に搭載したワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれかへ搬出させるものである。
なお、図1乃至図3には、下降時のワーク搭載ユニット110を実線で示し、上昇時のワーク搭載ユニット110を仮想線で示す。また、図1乃至図3の太い矢印は、本実施例におけるワークWの搬送方向を示す。
【0034】
そして、本実施例の噛合チェーン式垂直搬送機100は、図1乃至図3に示すように、前述したワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110の下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブル111の底面中央部を支持してワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120と、この一対の噛合チェーン120を昇降自在に駆動する駆動スプロケット130と、この駆動スプロケット130に駆動力を供給する駆動モータ140とを備えている。
ワーク搭載ユニット110は、矩形状の平面形状を有する昇降テーブル111およびこの昇降テーブル111上に配置されてワークWを搭載するとともに昇降テーブル111の前後左右のそれぞれの方向にワークWを搬入出するワーク搬入出機構112を有している。
これにより、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の垂直位置における停止位置を変更して昇降テーブル111の前後左右方向のそれぞれにワークWを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークWの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークWについて高さ方向の位置を変更して4方向、すなわち図中X1、X2、Y1およびY2方向のそれぞれにワークWを搬入出させて仕分けするようになっている。
【0035】
さらに、噛合チェーン式垂直搬送機100は、一対の噛合チェーン120が相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニット110の最上昇位置を設定するとともに一対の噛合チェーン120が相互に噛み外れて分岐する直前位置までワーク搭載ユニット110の最下降位置を設定するため、ワーク搭載ユニット110の昇降ストロークを最大限に発揮して垂直方向におけるワークWの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークWの破損を回避することができる。
また、噛合チェーン式垂直搬送機100は、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140が配置されるため、装置サイズが大型化することを回避するとともに昇降テーブル111の上面領域内における清掃作業や昇降テーブル111の底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避するようになっている。
【0036】
また、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅にそれぞれ立設されているとともに、ガイドレール150に沿って転動するガイドローラ160が昇降テーブル111の四隅に対向して配置されていることにより、一対の噛合チェーン120で昇降するワーク搭載ユニット110が複数のガイドレール150でそれぞれ誘導案内されるため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110に生じがちな横揺れと縦揺れを防止して確実かつ安定したワークWの垂直搬送を実現するようになっている。
また、ガイドローラ160がガイドレール150に当接した状態でガイドレール150に沿って転動走行するため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の横揺れを抑制してワーク搭載ユニット110を円滑に昇降させるようになっている。
【0037】
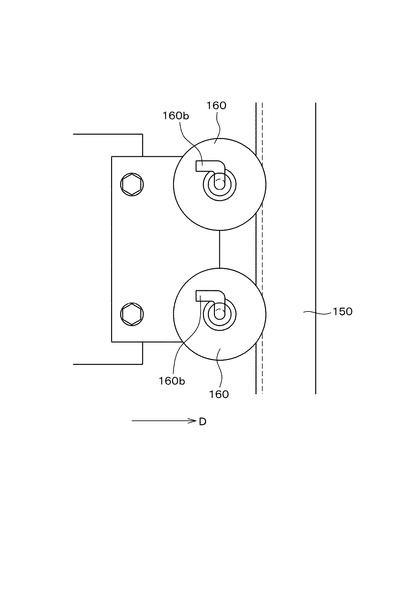
図1、図2および図8に示すように、噛合チェーン式垂直搬送機100では、ガイドローラ160が、昇降テーブル111の上下面近傍に複数設けられていることにより、ワーク搭載ユニット110が傾かないようにより確実に垂直方向に案内されるため、噛合チェーン式垂直搬送機100が、ワーク搭載ユニット110に生じがちな左右前後の横揺れを完全かつ確実に回避するようになっている。
また、図3に示すように、噛合チェーン式垂直搬送機100では、ガイドレール150に当接するガイドローラ160の設置方向Dが、一対の噛合チェーン120を相互に噛み外して分岐自在にする噛合平面の向き、より具体的には、図中Y1方向およびY2方向に対して交差していることにより、ガイドレール150とガイドローラ160との当接状態でワーク搭載ユニット110に生じがちな左右前後のいずれか一方の横揺れを回避し、一対の噛合チェーン120の噛み合わせでワーク搭載ユニット110に生じがちな左右前後の他方の横揺れを回避するため、噛合チェーン式垂直搬送機100が、ワーク搭載ユニット110に生じがちな左右前後の横揺れを完全かつ確実に回避するようになっている。
また、図1乃至図3に示すように、噛合チェーン式垂直搬送機100では、一対の噛合チェーン120と駆動スプロケット130と駆動モータ140が昇降テーブル111の垂直投影面内に配置されていることにより、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140を設置されるため、噛合チェーン式垂直搬送機100が、その内部において省スペース化を実現するようになっている。
【0038】
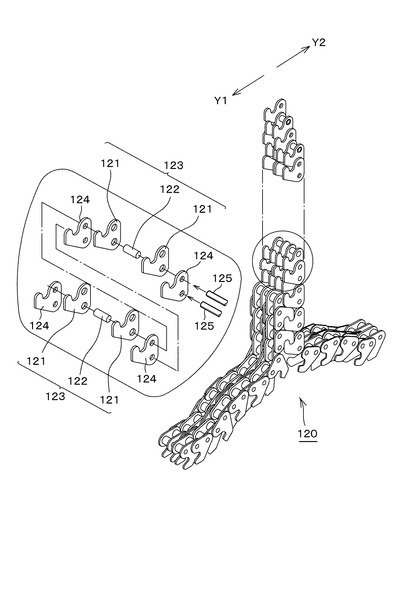
次に、図5乃至図7を参照しながら、一対の噛合チェーン120およびその周辺近傍の構成を詳細に説明する。
図5に示すように、前述した一対の噛合チェーン120は、左右一対で離間配置されるフック状内歯プレート121に前後一対のブシュ122を圧入嵌合してなる内リンクユニット123がチェーン幅方向の最も外側に配置されたフック状外歯プレート124の前後一対のピン孔に圧入嵌合する前後一対の連結ピン125によりチェーン長手方向に多数連結されている。
このようにして、一対の噛合チェーン120は、水平方向から垂直方向へ偏向しながら相互に対向するフック状内歯プレート121同士およびフック状外歯プレート124同士をそれぞれ噛み合せて一体に自立状態で上昇するようになっており、また、垂直方向から水平方向へ偏向しながらフック状内歯プレート121同士およびフック状外歯プレート124同士をそれぞれ噛み外して分岐するようになっている。
【0039】
したがって、前述した一対の噛合チェーン120は、図7に示すように、相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となるように構成されているため、一対の噛合チェーン120が相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニット110の最上昇位置を設定するとともに一対の噛合チェーン120が相互に噛み外れて分岐する直前位置までワーク搭載ユニット110の最下降位置を設定するようになっている。
【0040】
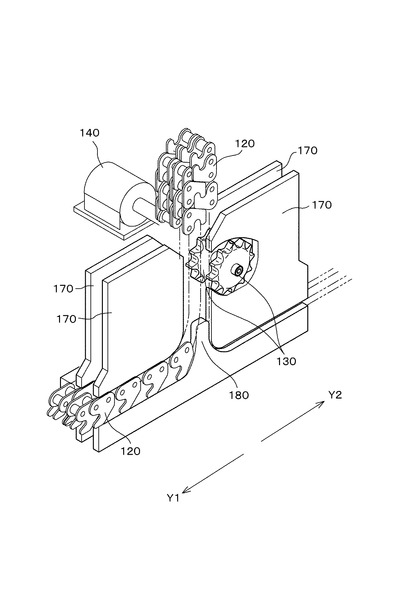
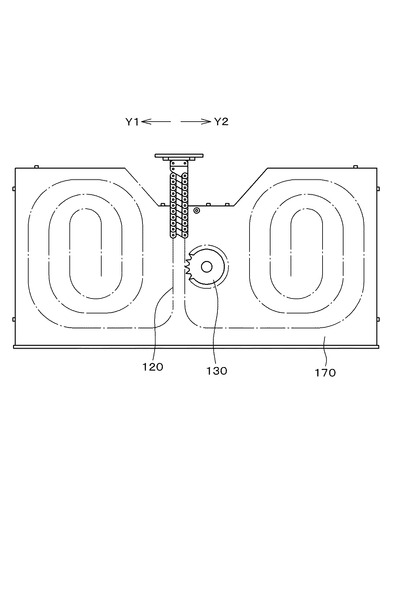
また、図6および図7に示す符号170は、一対の噛合チェーン120が相互に噛み外れて分岐した噛合チェーンをそれぞれ収納する巻き取り型のチェーン収納ボックスからなるチェーン収納手段であり、このチェーン収納手段170は、駆動モータ140と同様に、ワーク搭載ユニット110の最下降位置の周辺域、すなわち、ワーク搭載ユニット110の投影傘下に離間配置されている。
【0041】
なお、図6に示す符号180は、一対の噛合チェーン120の偏向位置の股間領域に設けて一対の噛合チェーン120を誘導移動するチェーン誘導プレートであり、このチェーン誘導プレート180が、上昇駆動時に一対の噛合チェーン120を相互に噛み合わせて一体に自立状態で上昇させるとともに、一対の噛合チェーン120を相互に噛み外して分岐させるようになっている。
【0042】
そして、前述した駆動スプロケット130は、図6および図7に示すように、一対の噛合チェーン120を一体に噛み合せた剛直位置に設けられている。
これにより、剛直化した一対の噛合チェーン120に対して駆動スプロケット130が噛み合って、所謂、ピニオンラック機構を呈するため、チェーン分岐方向からチェーン噛合方向へ偏向駆動される偏向位置で噛合チェーン120を駆動スプロケット130に巻き掛けた場合に駆動スプロケット130と噛合チェーン120との間で生じる周知のコーダルアクション(多角形運動)の発生が回避され、このコーダルアクションに起因した上下動(脈動)、振動、騒音、速度変動の発生を防止し、ワークWの安定した昇降駆動を実現している。
【0043】
さらに、前述した駆動スプロケット130は、図6および図7に示すように、一対の噛合チェーン120の一方に設けられている。
これにより、噛合チェーン式垂直搬送機100は、一対の噛合チェーン120の両方に駆動スプロケットをそれぞれ設置する噛合チェーン式垂直搬送機と比較して、装置全体の部品点数を低減し、装置構成を簡素化して他構成部材の設計や装置全体の設置場所等に関する高い自由度を確保するとともに、装置組立および保守メンテナンスに係る作業負担をより低減するようになっている。
加えて、一対の噛合チェーンの両方に駆動スプロケットをそれぞれ設置した噛合チェーン式垂直搬送機において生じがちな一対の駆動スプロケット間の回転位相ズレに起因した一対の噛合チェーン間の噛合振動の発生が回避されるため、噛合チェーン式垂直搬送機100は、ワークWの安定した昇降動作を実現するようになっている。
【0044】
また、前述した駆動モータ140には、サーボモータを採用している。
これにより、サーボモータの回転数が簡便に制御可能となるため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の昇降範囲や停止位置が自由かつ正確に制御されるようになっている。
【0045】
そして、上述したように、一対の噛合チェーン120と駆動スプロケット130と駆動モータ140とは、昇降テーブル111の垂直投影面内に配置されるため、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140が配置されることになり、噛合チェーン式垂直搬送機100は、その設置面における省スペース化を実現するようになっている。
【0046】
つぎに、本実施例の噛合チェーン式垂直搬送機100が最も特徴とする昇降テーブル111と噛合チェーン120とガイドレール150との相互の配置形態について、以下に詳細に説明する。
まず、図1乃至図3、および図8に示すように、ガイドレール150に当接した状態でガイドレール150に沿って転動する鼓型ローラからなるガイドローラ160が、昇降テーブル111の四隅に対向して配置されている。
これにより、ガイドローラ160の円弧状湾曲ローラ面160aが、ガイドレール150に当接した状態でガイドレール150に沿って円滑に転動走行するようになっている。
なお、前述したガイドローラ160は、図8に示すように、垂直方向に沿って配置されたガイドローラ160同士を一体に組みつけるためのブラケットに設けたL字状穴160bに装着されており、ガイドレール150に対するズレなどを抑制してガイドレール150に確実に当接するようになっている。
【0047】
そして、本実施例の噛合チェーン式垂直搬送機100では、前述したガイドレール150に対向する一対のガイドローラ160の配置方向Dが、一対の噛合チェーン120を相互に噛み合わせた噛合方向Y1およびY2に交差している。
これにより、ガイドレール150とガイドローラ160の円弧状湾曲ローラ面160aとの当接状態でワーク搭載ユニット110に生じがちな左右前後のいずれか一方の横揺れを防止し、一対の噛合チェーン120の噛み合わせでワーク搭載ユニット110に生じがちな左右前後の他方の横揺れを防止している。
【0048】
ここで、本実施例の噛合チェーン式垂直搬送機100の搬送動作について、図1乃至図4、および図9に基づいて、以下に詳細に説明する。
まず、作業エリアの下部位置の搬入側ロールコンベヤIRから搬入されたワークWをワーク搭載ユニット110に搭載し、このワーク搭載ユニット110をガイドレール150で上方へ誘導案内しながら一対の噛合チェーン120により上昇させて垂直搬送した後、ワーク搭載ユニット110に搭載したワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれか一つへ搬出させる。
【0049】
次いで、ワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれか一つへ搬出させた後のワーク搭載ユニット110は、ガイドレール150により下方へ誘導案内されて一対の噛合チェーン120により作業エリアの下部位置まで下降され、搬入側ロールコンベヤIRから搬入されるワークWを待ち受ける。
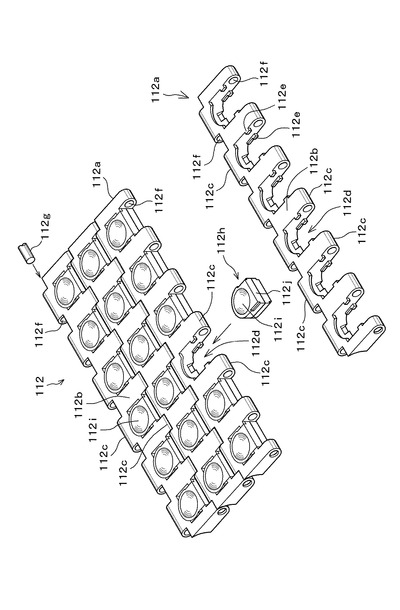
ワーク搬入出機構112は、多数のチェーンリンク112aがヒンジ部112cに設けられたピン孔112fにヒンジピン112gを挿通することにより、すなわち、ヒンジピン112gを介してチェーン長手方向に相互に多数連結されており、チェーンリンク112aに形成されたユニット装着領域112dにフリーボール112iがボールユニット112hの形で装着され、すなわち、フリーボール112iがチェーンリンク112aに保持されて平坦な底面を備えた箱状、板状等のワークWをフリーボール112i上に載荷して昇降テーブル111の前後左右にワークWを搬入出するように構成したコンベヤチェーンである。
ここで、チェーンリンク112aは、図9に示すように、前方端縁と後方端縁から千鳥状に突出する複数のヒンジ部112cと、一方の縁端のヒンジ部112c,112c間のワーク載荷側112bに設けられたU字状ユニット装着領域112dと、U字状ユニット装着領域112dに設けられ、装着されたボールユニット112hを係止する上下一対の係止用突起部112e,112eと、ワーク搬入出機構112の裏面側に設けられ、駆動側スプロケットなどと噛み合って搬送動力を伝達する噛み合い部とがエンジニアリングプラスチックのような合成樹脂によって一体成形されている。
フリーボール112iは、ワーク搬送及びワークの搬送方向転換機能及び倍速機能を奏するものであって、ボール保持部となる上下一対のリテーナ112j,112jにより回転自在に保持されてボールユニット112hを構成しており、フリーボール112iは、ポリアミドで形成され、上下一対のリテーナ112j,112jは、ポリアセタールで形成されている。
なお、ワーク搬入出機構112は、ワークWを昇降テーブル111の前後左右に搬入出可能な機構を有していれば如何なる機構を有していてもよく、コンベヤチェーンに限定されるものではない。
【0050】
したがって、本実施例の噛合チェーン式垂直搬送機100は、上述したような動作を繰り返してワーク搭載ユニット110を昇降させることにより、ワークWを順次垂直搬送するようになっている。
【0051】
このようにして得られた本実施例の噛合チェーン式垂直搬送機100は、ワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110の下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブル111の底面中央部を支持してワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120と、この一対の噛合チェーン120を昇降自在に駆動する駆動スプロケット130と、この駆動スプロケット130に駆動力を供給する駆動モータ140とを備え、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅にそれぞれ立設されているとともに、ガイドレール150に沿って転動するガイドローラ160が昇降テーブル111の四隅に対向して配置されていることにより、ワーク搭載ユニット110の垂直位置における停止位置を変更して昇降テーブル111の前後左右向のそれぞれにワークWを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークWの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークWについて高さ方向の位置を変更して4方向、すなわち図中X1、X2、Y1およびY2方向のそれぞれに搬入出させて仕分けすることができるなど、その効果は甚大である。
【符号の説明】
【0052】
100 ・・・ 噛合チェーン式垂直搬送機
110 ・・・ ワーク搭載ユニット
111 ・・・ 昇降テーブル
112 ・・・ ワーク搬入出機構
112a ・・・ チェーンリンク
112b ・・・ ワーク載荷側
112c ・・・ ヒンジ部
112d ・・・ ユニット装着領域
112e ・・・ 係止用突起部
112f ・・・ ピン孔
112g ・・・ ヒンジピン
112h ・・・ ボールユニット
112i ・・・ フリーボール
112j ・・・ リテーナ
120 ・・・ 一対の噛合チェーン
121 ・・・ フック状内歯プレート
122 ・・・ ブシュ
123 ・・・ 内リンクユニット
124 ・・・ フック状外歯プレート
125 ・・・ 連結ピン
130 ・・・ 駆動スプロケット
140 ・・・ 駆動モータ
150 ・・・ ガイドレール
160 ・・・ ガイドローラ
160a ・・・ 円弧状湾曲ローラ面
160b ・・・ L字状穴
170 ・・・ チェーン収納手段
180 ・・・ チェーン誘導プレート
D ・・・設置方向
IR ・・・ 搬入側ロールコンベヤ
OR1、OR2、OR3、OR4 ・・・ 搬出側ロールコンベヤ
X1、X2、Y1、Y2 ・・・ ワーク搬入出方向
W ・・・ ワーク
【技術分野】
【0001】
本発明は、各種製造分野の製造設備、運輸分野の移送設備などに用いてワークを昇降させる垂直搬送機であって、特に、噛合チェーンを昇降動作の駆動媒体として採用した噛合チェーン式垂直搬送機に関する。
【背景技術】
【0002】
従来、垂直搬送機として、下階から上階まで貫通して設けたフレームの内部に箱型のキャリッジが条体により保持され、モータにより駆動してキャリッジを昇降させるもの(例えば、特許文献1参照。)や、ガイドローラの駆動時に生じる騒音が低減された垂直連続搬送装置における荷受台(例えば、特許文献2参照。)がある。
また、搬送対象である物品の搬送方向を上下方向に切り替えて仕分けする縦仕分装置がある(例えば、特許文献3参照。)。
また、相互に向かい合う2方向にコンベヤから製品を搬送して仕分けする仕分けシステムがある(例えば、特許文献4参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実公平8−3386号公報(特許請求の範囲、図1)
【特許文献2】特表2008−514524号公報(特許請求の範囲、図1)
【特許文献3】特開2007−290804号公報(特許請求の範囲、図1)
【特許文献4】特開2004−051368号公報(特許請求の範囲、図3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1乃至特許文献4のそれぞれに開示された各装置では、被搬送物であるワークの搬送方向または仕分け方向がいずれも2方向であるため、装置の設置面に平行な仮想平面内で相互に異なる4方向にワークを搬入出させて仕分けすることが困難であるという問題点があった。
また、特許文献1に開示された縦仕分装置では、被搬送物であるワークの搬送方向を上下方向に変更する際に上部コンベヤベルトおよび下部コンベヤベルト相互の高さの違いに起因してこれらコンベヤベルト間に生じた段差部を物品が滑り落ちるため、ワークが段差部を滑り落ちる際に衝撃が加わって物品が破損してしまうおそれがあるという問題点があった。
加えて、ワークを搬入出する方向を変換する変換機構を装置内の限られたスペース内に設けた場合、変換機構にワークが接触してワークを破損させてしまうおそれがあるという問題点があった。
また、このような縦仕分装置で段差部を無くそうとするとコンベヤベルト相互間のスロープを小さくするための機構を設ける必要が生じるため、縦仕分装置内においてこれらコンベヤなどを設置する設置スペースが大きくなり装置の大型化を回避することが困難になるという問題点があった。
【0005】
また、特許文献3に開示された垂直搬送機は、キャリッジをワイヤーチェーンなどの条体で吊り下げてモータにより昇降駆動させているため、ワイヤーチェーンなどの条体が過度に伸びる可能性があり、モータの回転数を制御してもキャリッジの停止位置がずれて搬送作業に支障をきたすという問題点があった。
【0006】
そして、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、条体が装置フレーム内で複雑に取り回されており、日常時における昇降領域の清掃作業や長期使用した条体の交換作業が煩雑になるという問題点があるとともに、搬送スペースの他にワイヤーチェーンなどの条体を取り回すスペースなどが必要となり、装置全体の大型化を回避できないという問題点があった。
【0007】
また、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、チェーン潤滑油が搬送時の振動により飛散し、ワークを汚染することがあり、このようなワークの汚染を防止するために汚染防止用カバーなどを付設すると、設置スペースが拡大するばかりでなく、汚染防止用カバーの重量分だけ搬送負荷が増大するという問題点があった。
【0008】
さらに、キャリッジをワイヤーチェーンなどの条体で吊り下げて昇降駆動させるため、チェーンの噛み外れがワイヤーチェーンなどの条体に対して横揺れと縦揺れを惹起させて、昇降搬送時に搭載したワークが不安定になるという問題点があった。
【0009】
そこで、本発明は、従来の問題点を解決するものであって、すなわち、本発明の目的は、被搬送物であるワークを装置の設置面に平行な4方向に搬入出すると同時に昇降テーブルの横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送と省スペース化を実現するとともに、搬送負荷の増大および装置の大型化を回避すると同時に昇降領域の清掃作業や昇降部品の交換作業などの簡便な保守メンテナンス作業を実現する噛合チェーン式垂直搬送機を提供することである。
【課題を解決するための手段】
【0010】
請求項1に係る本発明は、矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに前記昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、該ワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで前記昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、該一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、該駆動スプロケットに駆動力を供給する駆動モータとを備えた噛合チェーン式垂直搬送機であって、前記ワーク搭載ユニットを誘導案内する複数のガイドレールが前記昇降テーブルの四隅にそれぞれ立設されているとともに、前記ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置されていることにより、前述した課題を解決したものである。
【0011】
請求項2に係る本発明は、請求項1に記載の構成に加えて、前記ガイドローラが、前記昇降テーブルの上下面近傍に複数設けられていることにより、前述した課題を解決したものである。
【0012】
請求項3に係る本発明は、請求項1または請求項2に記載の構成に加えて、前記ガイドレールに当接するガイドローラの設置方向が、前記一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることにより、前述した課題を解決したものである。
【0013】
請求項4に係る本発明は、請求項1乃至請求項3のいずれかに記載の構成に加えて、前記駆動スプロケットが、前記一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることにより、前述した課題を解決したものである。
【0014】
請求項5に係る本発明は、請求項1乃至請求項4のいずれかに記載の構成に加えて、前記駆動スプロケットが、前記一対の噛合チェーンの一方に設けられていることにより、前述した課題を解決したものである。
【0015】
請求項6に係る本発明は、請求項1乃至請求項5のいずれかに記載の構成に加えて、前記駆動モータが、サーボモータであることにより、前述した課題を解決したものである。
【0016】
請求項7に係る本発明は、請求項1乃至請求項6のいずれかに記載の構成に加えて、前記一対の噛合チェーン、駆動スプロケットおよび駆動モータが、前記昇降テーブルの垂直投影面内に配置されていることにより、前述した課題を解決したものである。
【発明の効果】
【0017】
請求項1に係る本発明の噛合チェーン式垂直搬送機によれば、矩形状の平面形状を有する昇降テーブルおよびこの昇降テーブル上に配置されてワークを搭載するとともに昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、このワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、この一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、この駆動スプロケットに駆動力を供給する駆動モータとを備えていることによって、ワーク搭載ユニットの垂直位置における停止位置を変更して昇降テーブルの前後左右いずれであってもワークを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークについて高さ方向の位置を変更して昇降テーブルの前後左右方向、すなわち4方向のそれぞれにワークを搬入出させて仕分けすることができる。
さらに、一対の噛合チェーンが相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニットの最上昇位置を設定するとともに一対の噛合チェーンが相互に噛み外れて分岐する直前位置までワーク搭載ユニットの最下降位置を設定するため、ワーク搭載ユニットの昇降ストロークを最大限に発揮して垂直方向におけるワークの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークの破損を回避することができる。
【0018】
また、昇降テーブルの底面下部領域内に一対の噛合チェーンや駆動スプロケットや駆動モータが配置されるため、装置サイズが大型化することを回避するとともに昇降テーブルの上面領域内における清掃作業や昇降テーブルの底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避することができる。
また、ワーク搭載ユニットを誘導案内する複数のガイドレールが昇降テーブルの四隅にそれぞれ立設されているとともに、ガイドレールに沿って転動するガイドローラが昇降テーブルの四隅に対向して配置されていることにより、一対の噛合チェーンで昇降するワーク搭載ユニットが複数のガイドレールでそれぞれ誘導案内されるため、ワーク搭載ユニットに生じがちな横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送を実現し、また、ガイドローラがガイドレールに当接した状態でガイドに沿って転動走行するため、ワーク搭載ユニットの横揺れを抑制してワーク搭載ユニットを円滑に昇降させることができる。
【0019】
そして、請求項2に係る噛合チェーン式垂直搬送機によれば、請求項1に記載の噛合チェーン式垂直搬送機が奏する効果に加えて、ガイドローラが、昇降テーブルの上下面近傍に複数設けられていることにより、ワーク搭載ユニットが傾かないようにより確実に垂直方向に案内されるため、ワーク搭載ユニットに生じがちな左右前後の横揺れを完全かつ確実に回避することができる。
【0020】
そして、請求項3に係る噛合チェーン式垂直搬送機によれば、請求項1または請求項2に記載の噛合チェーン式垂直搬送機が奏する効果に加えて、ガイドレールに当接するガイドローラの設置方向が、一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることにより、ガイドレールとガイドローラとの当接状態でワーク搭載ユニットに生じがちな左右前後のいずれか一方の横揺れを回避し、一対の噛合チェーンの噛み合わせでワーク搭載ユニットに生じがちな左右前後の他方の横揺れを回避するため、ワーク搭載ユニットに生じがちな左右前後の横揺れを完全かつ確実に回避することができる。
【0021】
また、請求項4に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項3の何れか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動スプロケットが、一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることにより、剛直化した一対の噛合チェーンに対して駆動スプロケットが噛み合って、所謂、ピニオンラック機構を呈するため、チェーン分岐方向からチェーン噛合方向へ偏向駆動される偏向位置で噛合チェーンを駆動スプロケットに巻き掛けた場合に駆動スプロケットと噛合チェーンとの間で生じる周知のコーダルアクション(多角形運動)の発生が回避され、このコーダルアクションに起因した上下動(脈動)、振動、騒音、速度変動の発生を防止でき、ワークの安定した昇降駆動を実現することができる。
【0022】
請求項5に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項4のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動スプロケットが一対の噛合チェーンの一方に設けられていることにより、一対の噛合チェーンの両方に昇降用スプロケットをそれぞれ設置する噛合チェーン式垂直搬送機と比較して装置全体の部品点数が低減するため、装置構成を簡素化して他構成部材の設計や装置全体の設置場所等に関する高い自由度を確保できるとともに、装置組立および保守メンテナンスに係る作業負担をより低減することができる。
【0023】
また、一対の噛合チェーンの両方に駆動スプロケットをそれぞれ設置した噛合チェーン式垂直搬送機において生じがちな一対の駆動スプロケット間の回転位相ズレに起因した一対の噛合チェーン間の噛合振動の発生を回避するため、ワークの安定した昇降動作を実現することができる。
【0024】
そして、請求項6に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項5のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、駆動モータがサーボモータであることにより、サーボモータの回転数が簡便に制御可能となるため、ワーク搭載ユニットの昇降範囲や停止位置を自由かつ正確に制御して搬送先である他のコンベヤとワーク搭載ユニットとの間に段差が生じることを確実に回避することができる。
【0025】
さらに、請求項7に係る噛合チェーン式垂直搬送機によれば、請求項1乃至請求項6のいずれか1つに記載の噛合チェーン式垂直搬送機が奏する効果に加えて、一対の噛合チェーンと駆動スプロケットと駆動モータが昇降テーブルの垂直投影面内に配置されていることにより、昇降テーブルの底面下部領域内に一対の噛合チェーンや駆動スプロケットや駆動モータを設置することが可能になるため、省スペース化を実現することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施例である噛合チェーン式垂直搬送機の正面図。
【図2】図1に示す噛合チェーン式垂直搬送機の側面図。
【図3】図1に示す噛合チェーン式垂直搬送機の平面図。
【図4】図1に示す噛合チェーン式垂直搬送機の搬送動作を示した概念図。
【図5】噛合チェーンの分解組み立て状態と噛み外れ状態を示す斜視図。
【図6】駆動スプロケット近傍の斜視図。
【図7】噛合チェーンの噛み外れ状態の概略図。
【図8】ガイドレールに対するガイドローラの当接状態を示す図。
【図9】ワーク搬入出機構を表面からみた概要説明図。
【発明を実施するための形態】
【0027】
本発明の噛合チェーン式垂直搬送機は、矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、このワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、この一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、この駆動スプロケットに駆動力を供給する駆動モータとを備え、ワーク搭載ユニットを誘導案内する複数のガイドレールが昇降テーブルの四隅にそれぞれ立設されているとともに、ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置され、3次元的にみてワークの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークについて高さ方向の位置を変更してワークを前後左右の4方向のそれぞれに搬入出させて仕分けすると同時にワーク搭載ユニットの昇降ストロークを最大限に発揮して垂直方向におけるワークの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークの破損を回避し、装置サイズが大型化することを回避すると同時に昇降テーブルの上面領域内における清掃作業や昇降テーブルの底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避し、ワーク搭載ユニットに生じがちな横揺れと縦揺れを防止して確実かつ安定したワークの垂直搬送を実現し、また、ワーク搭載ユニットの横揺れを抑制してワーク搭載ユニットを円滑に昇降させるものであれば、その具体的な実施の態様は、如何なるものであっても何ら構わない。
【0028】
たとえば、本発明の噛合チェーン式垂直搬送機は、ワークを搭載する昇降テーブルを下部位置と上部位置との間で垂直搬送することが可能であれば、如何なる装置レイアウトであっても良く、例えば、下部位置に連接した搬入側コンベヤなどのワーク搬入側から搬入したワークを上昇させて垂直搬送した後に、昇降テーブルの前後左右のそれぞれの側に連接した搬出側コンベヤなどのワーク搬出側へ搬出するもの、もしくは、その逆にワークを下降させて垂直搬送するものなどのいずれであっても適用することができる。
【0029】
そして、本発明の噛合チェーン式垂直搬送機で用いられる一対の噛合チェーンは、一対の駆動スプロケットにより相互に噛み合わせて一体化するとともに一対の駆動スプロケットにより相互に噛み外れて分岐するものであれば、その具体的なチェーン形態は如何なるものであっても良く、例えば、チェーン幅方向に1列の単列であるもの、チェーン幅方向に2列以上の複列であるものなど何れであっても構わないが、チェーン幅方向に2列以上の複列であるものを採用する場合には、一対の噛合チェーンの一方を構成するフック状外歯プレートとフック状内歯プレートが、これに対向する他方の噛合チェーンを構成するフック状外歯プレートとフック状内歯プレートに対してチェーン幅方向の複列に亙ってそれぞれフック状に多重かつ強固に噛み合うため、噛合チェーンのチェーン幅方向に生じがちな座屈を確実に抑制して優れたチェーン耐久性を実現することができるので、より好ましい。
【0030】
また、本発明の噛合チェーン式垂直搬送機で用いられる一対の噛合チェーンは、ローラを有していないもの、すなわち、ブシュのみを有するもの、ローラを有するものなど何れであっても構わないが、ブシュのみを有するものを採用する場合には、チェーン部品点数が低減して、チェーン重量の軽量化を図ることができる。
【0031】
さらに、本発明の噛合チェーン式垂直搬送機で用いられるワーク搬入出機構の具体的な形態については、搬入側コンベヤや搬出側コンベヤとの乗り継ぎ時に支障が少ない矩形の搭載面を備えたものが好ましい。
【実施例】
【0032】
以下、本発明の一実施例である噛合チェーン式垂直搬送機100を図面に基づいて説明する。
ここで、図1は、本発明の一実施例である噛合チェーン式垂直搬送機の正面図であり、図2は、図1に示す噛合チェーン式垂直搬送機の側面図であり、図3は、図1に示す噛合チェーン式垂直搬送機の平面図であり、図4は、図1に示す噛合チェーン式垂直搬送機の搬送動作を示した概念図であり、図5は、噛合チェーンの分解組み立て状態と噛み外れ状態を示す斜視図であり、図6は、駆動スプロケット近傍の斜視図であり、図7は、噛合チェーンの噛み外れ状態の概略図であり、図8は、ガイドレールに対するガイドローラの当接状態を示す図であり、図9は、ワーク搬入出機構を表面からみた概要説明図である。
【0033】
本発明の一実施例である噛合チェーン式垂直搬送機100は、各種製造分野の製造設備、運輸分野の移送設備などに用いるものであって、図1乃至図4に示すように、下部位置の搬入側ロールコンベヤIRから搬入された重量物などのワークWをワーク搭載ユニット110に搭載し、このワーク搭載ユニット110を作業エリアの設置面に対して昇降させて垂直搬送し、ワーク搭載ユニット110に搭載したワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれかへ搬出させるものである。
なお、図1乃至図3には、下降時のワーク搭載ユニット110を実線で示し、上昇時のワーク搭載ユニット110を仮想線で示す。また、図1乃至図3の太い矢印は、本実施例におけるワークWの搬送方向を示す。
【0034】
そして、本実施例の噛合チェーン式垂直搬送機100は、図1乃至図3に示すように、前述したワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110の下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブル111の底面中央部を支持してワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120と、この一対の噛合チェーン120を昇降自在に駆動する駆動スプロケット130と、この駆動スプロケット130に駆動力を供給する駆動モータ140とを備えている。
ワーク搭載ユニット110は、矩形状の平面形状を有する昇降テーブル111およびこの昇降テーブル111上に配置されてワークWを搭載するとともに昇降テーブル111の前後左右のそれぞれの方向にワークWを搬入出するワーク搬入出機構112を有している。
これにより、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の垂直位置における停止位置を変更して昇降テーブル111の前後左右方向のそれぞれにワークWを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークWの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークWについて高さ方向の位置を変更して4方向、すなわち図中X1、X2、Y1およびY2方向のそれぞれにワークWを搬入出させて仕分けするようになっている。
【0035】
さらに、噛合チェーン式垂直搬送機100は、一対の噛合チェーン120が相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニット110の最上昇位置を設定するとともに一対の噛合チェーン120が相互に噛み外れて分岐する直前位置までワーク搭載ユニット110の最下降位置を設定するため、ワーク搭載ユニット110の昇降ストロークを最大限に発揮して垂直方向におけるワークWの搬入出位置の自由度の向上および位置決め精度を高めて搬送時に生じうるワークWの破損を回避することができる。
また、噛合チェーン式垂直搬送機100は、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140が配置されるため、装置サイズが大型化することを回避するとともに昇降テーブル111の上面領域内における清掃作業や昇降テーブル111の底面下部領域内における昇降部品の交換作業などの簡便な保守メンテナンス作業を実現するとともに搬送負荷の増大を回避するようになっている。
【0036】
また、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅にそれぞれ立設されているとともに、ガイドレール150に沿って転動するガイドローラ160が昇降テーブル111の四隅に対向して配置されていることにより、一対の噛合チェーン120で昇降するワーク搭載ユニット110が複数のガイドレール150でそれぞれ誘導案内されるため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110に生じがちな横揺れと縦揺れを防止して確実かつ安定したワークWの垂直搬送を実現するようになっている。
また、ガイドローラ160がガイドレール150に当接した状態でガイドレール150に沿って転動走行するため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の横揺れを抑制してワーク搭載ユニット110を円滑に昇降させるようになっている。
【0037】
図1、図2および図8に示すように、噛合チェーン式垂直搬送機100では、ガイドローラ160が、昇降テーブル111の上下面近傍に複数設けられていることにより、ワーク搭載ユニット110が傾かないようにより確実に垂直方向に案内されるため、噛合チェーン式垂直搬送機100が、ワーク搭載ユニット110に生じがちな左右前後の横揺れを完全かつ確実に回避するようになっている。
また、図3に示すように、噛合チェーン式垂直搬送機100では、ガイドレール150に当接するガイドローラ160の設置方向Dが、一対の噛合チェーン120を相互に噛み外して分岐自在にする噛合平面の向き、より具体的には、図中Y1方向およびY2方向に対して交差していることにより、ガイドレール150とガイドローラ160との当接状態でワーク搭載ユニット110に生じがちな左右前後のいずれか一方の横揺れを回避し、一対の噛合チェーン120の噛み合わせでワーク搭載ユニット110に生じがちな左右前後の他方の横揺れを回避するため、噛合チェーン式垂直搬送機100が、ワーク搭載ユニット110に生じがちな左右前後の横揺れを完全かつ確実に回避するようになっている。
また、図1乃至図3に示すように、噛合チェーン式垂直搬送機100では、一対の噛合チェーン120と駆動スプロケット130と駆動モータ140が昇降テーブル111の垂直投影面内に配置されていることにより、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140を設置されるため、噛合チェーン式垂直搬送機100が、その内部において省スペース化を実現するようになっている。
【0038】
次に、図5乃至図7を参照しながら、一対の噛合チェーン120およびその周辺近傍の構成を詳細に説明する。
図5に示すように、前述した一対の噛合チェーン120は、左右一対で離間配置されるフック状内歯プレート121に前後一対のブシュ122を圧入嵌合してなる内リンクユニット123がチェーン幅方向の最も外側に配置されたフック状外歯プレート124の前後一対のピン孔に圧入嵌合する前後一対の連結ピン125によりチェーン長手方向に多数連結されている。
このようにして、一対の噛合チェーン120は、水平方向から垂直方向へ偏向しながら相互に対向するフック状内歯プレート121同士およびフック状外歯プレート124同士をそれぞれ噛み合せて一体に自立状態で上昇するようになっており、また、垂直方向から水平方向へ偏向しながらフック状内歯プレート121同士およびフック状外歯プレート124同士をそれぞれ噛み外して分岐するようになっている。
【0039】
したがって、前述した一対の噛合チェーン120は、図7に示すように、相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となるように構成されているため、一対の噛合チェーン120が相互に噛み合って対向配置した状態で一体に剛直化する上昇位置までワーク搭載ユニット110の最上昇位置を設定するとともに一対の噛合チェーン120が相互に噛み外れて分岐する直前位置までワーク搭載ユニット110の最下降位置を設定するようになっている。
【0040】
また、図6および図7に示す符号170は、一対の噛合チェーン120が相互に噛み外れて分岐した噛合チェーンをそれぞれ収納する巻き取り型のチェーン収納ボックスからなるチェーン収納手段であり、このチェーン収納手段170は、駆動モータ140と同様に、ワーク搭載ユニット110の最下降位置の周辺域、すなわち、ワーク搭載ユニット110の投影傘下に離間配置されている。
【0041】
なお、図6に示す符号180は、一対の噛合チェーン120の偏向位置の股間領域に設けて一対の噛合チェーン120を誘導移動するチェーン誘導プレートであり、このチェーン誘導プレート180が、上昇駆動時に一対の噛合チェーン120を相互に噛み合わせて一体に自立状態で上昇させるとともに、一対の噛合チェーン120を相互に噛み外して分岐させるようになっている。
【0042】
そして、前述した駆動スプロケット130は、図6および図7に示すように、一対の噛合チェーン120を一体に噛み合せた剛直位置に設けられている。
これにより、剛直化した一対の噛合チェーン120に対して駆動スプロケット130が噛み合って、所謂、ピニオンラック機構を呈するため、チェーン分岐方向からチェーン噛合方向へ偏向駆動される偏向位置で噛合チェーン120を駆動スプロケット130に巻き掛けた場合に駆動スプロケット130と噛合チェーン120との間で生じる周知のコーダルアクション(多角形運動)の発生が回避され、このコーダルアクションに起因した上下動(脈動)、振動、騒音、速度変動の発生を防止し、ワークWの安定した昇降駆動を実現している。
【0043】
さらに、前述した駆動スプロケット130は、図6および図7に示すように、一対の噛合チェーン120の一方に設けられている。
これにより、噛合チェーン式垂直搬送機100は、一対の噛合チェーン120の両方に駆動スプロケットをそれぞれ設置する噛合チェーン式垂直搬送機と比較して、装置全体の部品点数を低減し、装置構成を簡素化して他構成部材の設計や装置全体の設置場所等に関する高い自由度を確保するとともに、装置組立および保守メンテナンスに係る作業負担をより低減するようになっている。
加えて、一対の噛合チェーンの両方に駆動スプロケットをそれぞれ設置した噛合チェーン式垂直搬送機において生じがちな一対の駆動スプロケット間の回転位相ズレに起因した一対の噛合チェーン間の噛合振動の発生が回避されるため、噛合チェーン式垂直搬送機100は、ワークWの安定した昇降動作を実現するようになっている。
【0044】
また、前述した駆動モータ140には、サーボモータを採用している。
これにより、サーボモータの回転数が簡便に制御可能となるため、噛合チェーン式垂直搬送機100は、ワーク搭載ユニット110の昇降範囲や停止位置が自由かつ正確に制御されるようになっている。
【0045】
そして、上述したように、一対の噛合チェーン120と駆動スプロケット130と駆動モータ140とは、昇降テーブル111の垂直投影面内に配置されるため、昇降テーブル111の底面下部領域内に一対の噛合チェーン120や駆動スプロケット130や駆動モータ140が配置されることになり、噛合チェーン式垂直搬送機100は、その設置面における省スペース化を実現するようになっている。
【0046】
つぎに、本実施例の噛合チェーン式垂直搬送機100が最も特徴とする昇降テーブル111と噛合チェーン120とガイドレール150との相互の配置形態について、以下に詳細に説明する。
まず、図1乃至図3、および図8に示すように、ガイドレール150に当接した状態でガイドレール150に沿って転動する鼓型ローラからなるガイドローラ160が、昇降テーブル111の四隅に対向して配置されている。
これにより、ガイドローラ160の円弧状湾曲ローラ面160aが、ガイドレール150に当接した状態でガイドレール150に沿って円滑に転動走行するようになっている。
なお、前述したガイドローラ160は、図8に示すように、垂直方向に沿って配置されたガイドローラ160同士を一体に組みつけるためのブラケットに設けたL字状穴160bに装着されており、ガイドレール150に対するズレなどを抑制してガイドレール150に確実に当接するようになっている。
【0047】
そして、本実施例の噛合チェーン式垂直搬送機100では、前述したガイドレール150に対向する一対のガイドローラ160の配置方向Dが、一対の噛合チェーン120を相互に噛み合わせた噛合方向Y1およびY2に交差している。
これにより、ガイドレール150とガイドローラ160の円弧状湾曲ローラ面160aとの当接状態でワーク搭載ユニット110に生じがちな左右前後のいずれか一方の横揺れを防止し、一対の噛合チェーン120の噛み合わせでワーク搭載ユニット110に生じがちな左右前後の他方の横揺れを防止している。
【0048】
ここで、本実施例の噛合チェーン式垂直搬送機100の搬送動作について、図1乃至図4、および図9に基づいて、以下に詳細に説明する。
まず、作業エリアの下部位置の搬入側ロールコンベヤIRから搬入されたワークWをワーク搭載ユニット110に搭載し、このワーク搭載ユニット110をガイドレール150で上方へ誘導案内しながら一対の噛合チェーン120により上昇させて垂直搬送した後、ワーク搭載ユニット110に搭載したワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれか一つへ搬出させる。
【0049】
次いで、ワークWを上部位置の搬出側ロールコンベヤOR1、OR2、OR3およびOR4のいずれか一つへ搬出させた後のワーク搭載ユニット110は、ガイドレール150により下方へ誘導案内されて一対の噛合チェーン120により作業エリアの下部位置まで下降され、搬入側ロールコンベヤIRから搬入されるワークWを待ち受ける。
ワーク搬入出機構112は、多数のチェーンリンク112aがヒンジ部112cに設けられたピン孔112fにヒンジピン112gを挿通することにより、すなわち、ヒンジピン112gを介してチェーン長手方向に相互に多数連結されており、チェーンリンク112aに形成されたユニット装着領域112dにフリーボール112iがボールユニット112hの形で装着され、すなわち、フリーボール112iがチェーンリンク112aに保持されて平坦な底面を備えた箱状、板状等のワークWをフリーボール112i上に載荷して昇降テーブル111の前後左右にワークWを搬入出するように構成したコンベヤチェーンである。
ここで、チェーンリンク112aは、図9に示すように、前方端縁と後方端縁から千鳥状に突出する複数のヒンジ部112cと、一方の縁端のヒンジ部112c,112c間のワーク載荷側112bに設けられたU字状ユニット装着領域112dと、U字状ユニット装着領域112dに設けられ、装着されたボールユニット112hを係止する上下一対の係止用突起部112e,112eと、ワーク搬入出機構112の裏面側に設けられ、駆動側スプロケットなどと噛み合って搬送動力を伝達する噛み合い部とがエンジニアリングプラスチックのような合成樹脂によって一体成形されている。
フリーボール112iは、ワーク搬送及びワークの搬送方向転換機能及び倍速機能を奏するものであって、ボール保持部となる上下一対のリテーナ112j,112jにより回転自在に保持されてボールユニット112hを構成しており、フリーボール112iは、ポリアミドで形成され、上下一対のリテーナ112j,112jは、ポリアセタールで形成されている。
なお、ワーク搬入出機構112は、ワークWを昇降テーブル111の前後左右に搬入出可能な機構を有していれば如何なる機構を有していてもよく、コンベヤチェーンに限定されるものではない。
【0050】
したがって、本実施例の噛合チェーン式垂直搬送機100は、上述したような動作を繰り返してワーク搭載ユニット110を昇降させることにより、ワークWを順次垂直搬送するようになっている。
【0051】
このようにして得られた本実施例の噛合チェーン式垂直搬送機100は、ワークWを搭載する矩形状の搭載面を有するワーク搭載ユニット110と、このワーク搭載ユニット110の下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで昇降テーブル111の底面中央部を支持してワーク搭載ユニット110を昇降自在に駆動する一対の噛合チェーン120と、この一対の噛合チェーン120を昇降自在に駆動する駆動スプロケット130と、この駆動スプロケット130に駆動力を供給する駆動モータ140とを備え、ワーク搭載ユニット110を誘導案内する複数のガイドレール150が昇降テーブル111の四隅にそれぞれ立設されているとともに、ガイドレール150に沿って転動するガイドローラ160が昇降テーブル111の四隅に対向して配置されていることにより、ワーク搭載ユニット110の垂直位置における停止位置を変更して昇降テーブル111の前後左右向のそれぞれにワークWを装置外部から搬入するとともに装置外部に搬出するため、3次元的にみてワークWの搬入出経路を変更する自由度を従来の装置に比べて向上させ、ワークWについて高さ方向の位置を変更して4方向、すなわち図中X1、X2、Y1およびY2方向のそれぞれに搬入出させて仕分けすることができるなど、その効果は甚大である。
【符号の説明】
【0052】
100 ・・・ 噛合チェーン式垂直搬送機
110 ・・・ ワーク搭載ユニット
111 ・・・ 昇降テーブル
112 ・・・ ワーク搬入出機構
112a ・・・ チェーンリンク
112b ・・・ ワーク載荷側
112c ・・・ ヒンジ部
112d ・・・ ユニット装着領域
112e ・・・ 係止用突起部
112f ・・・ ピン孔
112g ・・・ ヒンジピン
112h ・・・ ボールユニット
112i ・・・ フリーボール
112j ・・・ リテーナ
120 ・・・ 一対の噛合チェーン
121 ・・・ フック状内歯プレート
122 ・・・ ブシュ
123 ・・・ 内リンクユニット
124 ・・・ フック状外歯プレート
125 ・・・ 連結ピン
130 ・・・ 駆動スプロケット
140 ・・・ 駆動モータ
150 ・・・ ガイドレール
160 ・・・ ガイドローラ
160a ・・・ 円弧状湾曲ローラ面
160b ・・・ L字状穴
170 ・・・ チェーン収納手段
180 ・・・ チェーン誘導プレート
D ・・・設置方向
IR ・・・ 搬入側ロールコンベヤ
OR1、OR2、OR3、OR4 ・・・ 搬出側ロールコンベヤ
X1、X2、Y1、Y2 ・・・ ワーク搬入出方向
W ・・・ ワーク
【特許請求の範囲】
【請求項1】
矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに前記昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、該ワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで前記昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、該一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、該駆動スプロケットに駆動力を供給する駆動モータとを備えた噛合チェーン式垂直搬送機であって、
前記ワーク搭載ユニットを誘導案内する複数のガイドレールが前記昇降テーブルの四隅にそれぞれ立設されているとともに、
前記ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置されていることを特徴とする噛合チェーン式垂直搬送機。
【請求項2】
前記ガイドローラが、前記昇降テーブルの上下面近傍に複数設けられていることを特徴とする請求項1記載の噛合チェーン式垂直搬送機。
【請求項3】
前記ガイドレールに当接するガイドローラの設置方向が、前記一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることを特徴とする請求項1または請求項2に記載の噛合チェーン式垂直搬送機。
【請求項4】
前記駆動スプロケットが、前記一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることを特徴とする請求項1乃至請求項3のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項5】
前記駆動スプロケットが、前記一対の噛合チェーンの一方に設けられていることを特徴とする請求項1乃至請求項4のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項6】
前記駆動モータが、サーボモータであることを特徴とする請求項1乃至請求項5のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項7】
前記一対の噛合チェーン、駆動スプロケットおよび駆動モータが、前記昇降テーブルの垂直投影面内に配置されていることを特徴とする請求項1乃至請求項6のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項1】
矩形状の平面形状を有する昇降テーブルおよび該昇降テーブル上に配置されてワークを搭載するとともに前記昇降テーブルの前後左右いずれであってもワークを搬入出するワーク搬入出機構を有するワーク搭載ユニットと、該ワーク搭載ユニットの下側で相互に噛み合って対向配置した状態で一体に剛直化するとともに相互に噛み外れて分岐自在となることで前記昇降テーブルの底面中央部を支持してワーク搭載ユニットを昇降自在に駆動する一対の噛合チェーンと、該一対の噛合チェーンを昇降自在に駆動する駆動スプロケットと、該駆動スプロケットに駆動力を供給する駆動モータとを備えた噛合チェーン式垂直搬送機であって、
前記ワーク搭載ユニットを誘導案内する複数のガイドレールが前記昇降テーブルの四隅にそれぞれ立設されているとともに、
前記ガイドレールに沿って転動するガイドローラが前記昇降テーブルの四隅に対向して配置されていることを特徴とする噛合チェーン式垂直搬送機。
【請求項2】
前記ガイドローラが、前記昇降テーブルの上下面近傍に複数設けられていることを特徴とする請求項1記載の噛合チェーン式垂直搬送機。
【請求項3】
前記ガイドレールに当接するガイドローラの設置方向が、前記一対の噛合チェーンを相互に噛み外して分岐自在にする噛合平面の向きと交差していることを特徴とする請求項1または請求項2に記載の噛合チェーン式垂直搬送機。
【請求項4】
前記駆動スプロケットが、前記一対の噛合チェーンを一体に噛み合せた剛直位置に設けられていることを特徴とする請求項1乃至請求項3のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項5】
前記駆動スプロケットが、前記一対の噛合チェーンの一方に設けられていることを特徴とする請求項1乃至請求項4のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項6】
前記駆動モータが、サーボモータであることを特徴とする請求項1乃至請求項5のいずれか1つに記載の噛合チェーン式垂直搬送機。
【請求項7】
前記一対の噛合チェーン、駆動スプロケットおよび駆動モータが、前記昇降テーブルの垂直投影面内に配置されていることを特徴とする請求項1乃至請求項6のいずれか1つに記載の噛合チェーン式垂直搬送機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−241082(P2011−241082A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−116574(P2010−116574)
【出願日】平成22年5月20日(2010.5.20)
【出願人】(000003355)株式会社椿本チエイン (861)
【出願人】(000180298)四国化工機株式会社 (44)
【出願人】(393028612)協栄システム株式会社 (3)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月20日(2010.5.20)
【出願人】(000003355)株式会社椿本チエイン (861)
【出願人】(000180298)四国化工機株式会社 (44)
【出願人】(393028612)協栄システム株式会社 (3)
【Fターム(参考)】
[ Back to top ]