
噴射装置用アクチュエータキャップ
ディスペンサー用アクチュエータキャップは、第1の端部と第2の端部を有する筐体を有する。第1の端部は、弁棒を有するエアゾール容器に保持される。導管は、容器の弁棒を受け取り、作動位置で弁棒を保持して容器内の弁アセンブリを開く注入口を有する。電磁弁は、導管と放出オリフィスに流体連通している。電磁弁は、制御装置から生成される信号によって閉状態から開状態へ切り替えられて導管と放出オリフィスの間に流路を形成する。制御装置は、リビングヒンジによって筐体上で保持されたトリガーの手動押下げに応答して、信号を生成する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、噴射装置から流体を放出することに係り、より詳細には、加圧エアゾール容器から流体を自動的及び手動的に放出するためのアクチュエータに関する。
【背景技術】
【0002】
一般に、エアゾール容器から加圧流体を自動的に送出するための放出装置にはエアゾール容器のノズルと係合するためのアクチュエータ機構が設けられている。いくつかのアクチュエータ機構は、エアゾール容器のノズルを開口位置で保持し、装置内の分離弁を介して流体の放出を調整する。これらの装置のいくつかにおいて、弁は、エアゾール容器の内容物を送出するために電気的に制御されて流路を開閉するソレノイド(電磁)弁を含む。しかしながら、これらの装置の多数は、タイマーやセンサによって自動的に生成される信号とユーザによるトリガーの手動作動によって生成される信号によって電磁弁が開くことを可能にしないという欠点があった。また、手動スイッチを含む装置が、スタンドアローン(独立)型又はユーザの手動によって使用されることを可能とする装置の筐体上に載置される容易に作動可能なトリガーを含んでいなかった。
【0003】
例えば、このような装置には、底壁に設けられた注入口を有する筐体を含むものがある。注入口は、容器の垂直動作可能なバルブステム(弁棒)を受け取り、押下げ開口位置において弁棒を保持して、容器から流体を放出させるように用いられる。バネによってバイアスされる栓を有する電磁弁は、底壁に隣接して配置される。装置が作動すると、栓は、横移動して、流体が、弁座(Valve seat)の開口、出口流路、出力開口を経て、筐体の外へ放出される経路を提供する。
【0004】
異なる例において、放出装置は、エアゾール容器を保持するように用いられる筐体を含む。電磁弁は、容器の放出端と連通しており、容器の放出弁を開口位置で維持する。制御装置は、電磁弁と電気的に接続されて、筐体の放出オリフィスと位置合わせされる放出出口を介して、流体を周期的に放出させる。また、制御装置に電気的に結合され、電磁弁の手動的な作動を可能とする手動スイッチも提供されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
一つの態様によれば、ディスペンサー用アクチュエータキャップは、第1の端部と第2の端部を有する筐体を含み、第1の端部は弁棒を有するエアゾール容器に保持される。容器内の弁アセンブリを開くために、容器の弁棒を受け取り、作動位置で弁棒を保持する注入口を有する導管が提供されている。電磁弁は、導管と放出オリフィスに流体連通し、制御装置から生成された信号によって閉状態から開状態へ切替えられて導管と放出オリフィスの間に流路を形成する。制御装置は、リビングヒンジによって筐体上に保持されているトリガーの手動押下げに応答して、信号を生成する。
【0006】
異なる態様において、ディスペンサー用オーバーキャップは、下端と上端を有する筐体を含み、下端は、弁棒を有するエアゾール容器上に保持される。第1の端部と第2の端部を有する導管が提供されており、第2の端部を画定する導管の部分は、押下げ開口位置において弁棒を保持し、第2の端部は、弁棒の放出オリフィスと流体連通している。電磁弁は、導管の第1の端部と放出オリフィスと流体連通しており、制御装置から生成される信号によって、閉状態から開状態へ切替えられる。制御装置は、リビングヒンジによって筐体で保持されるフランジの手動押下げに応答して、信号を生成する。
【0007】
他の態様において、ディスペンサー用の保持機構が、弁棒を有するエアゾール容器にブラケットを保持するように用いられる複数の内部延出フランジを有する環状ブラケットを含む。更に、ブラケットは、オーバーキャップと解除可能に係合し、オーバーキャップの内部の作動機構を弁棒と位置合わせする。
【0008】
本発明の他の態様及び利点は、以下の詳細な説明を考察することによってより明確に理解されよう。
【図面の簡単な説明】
【0009】
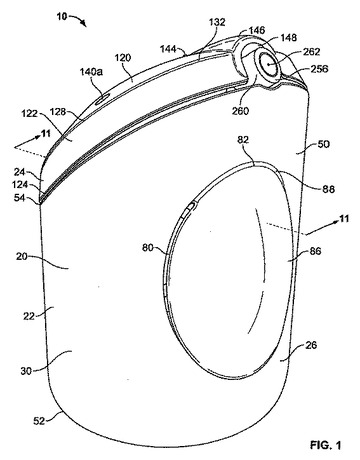
【図1】第1の実施の形態によるオーバーキャップの正面、左側面、及び上面を示す等角図である。
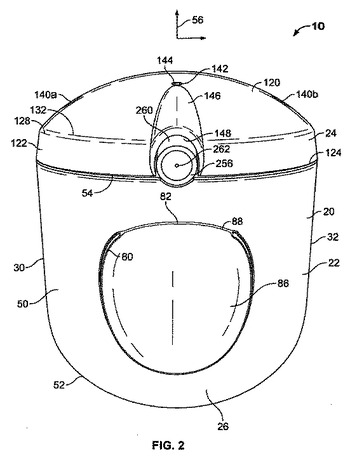
【図2】図1のオーバーキャップを示す正面等角図である。
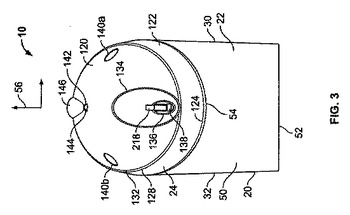
【図3】図1のオーバーキャップを示す背面図である。
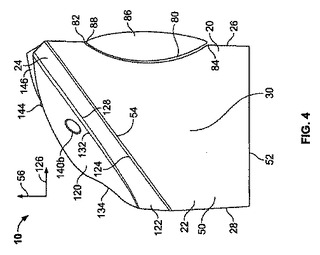
【図4】図1のオーバーキャップを示す左側面図である。
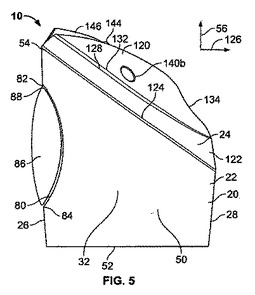
【図5】図1のオーバーキャップを示す右側面図である。
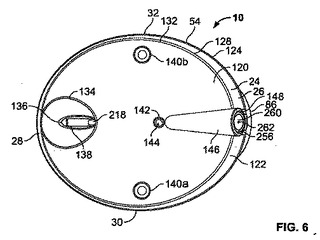
【図6】図1のオーバーキャップを示す平面図である。
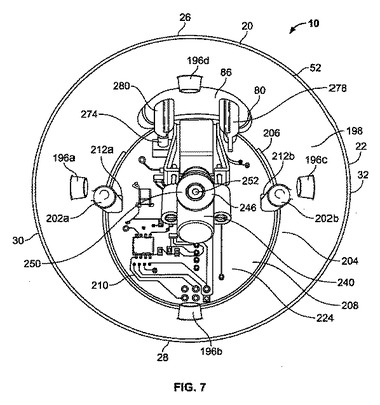
【図7】図1のオーバーキャップを示す底面図である。
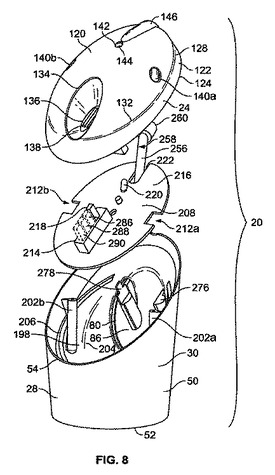
【図8】図1のオーバーキャップの本体、台、及び上端を示す背面分解等角図である。
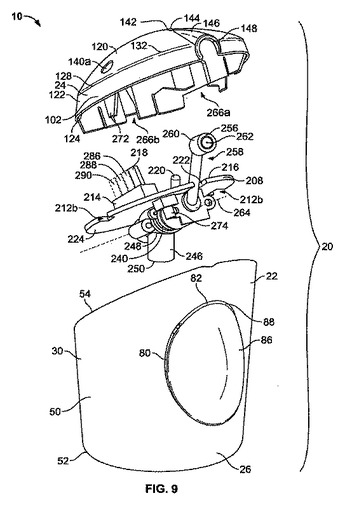
【図9】図1のオーバーキャップの本体、台、及び上端を示す正面分解等角図である。
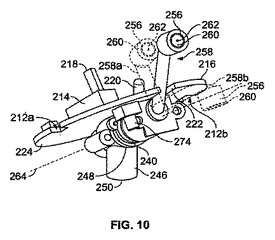
【図10】図8及び図9の台を示す拡大等角図である。
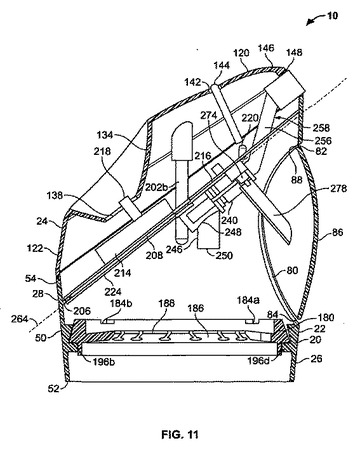
【図11】容器上にオーバーキャップを取付けるための一実施の形態によるブラケットを含む図1のオーバーキャップの線11−11に沿った部分断面図である。
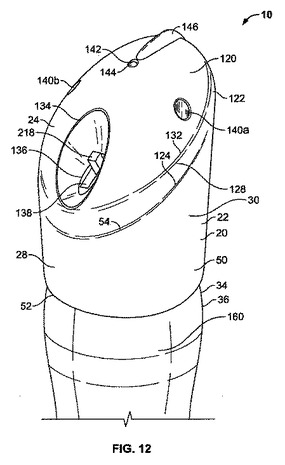
【図12】容器上の図1のオーバーキャップを示す等角図である。
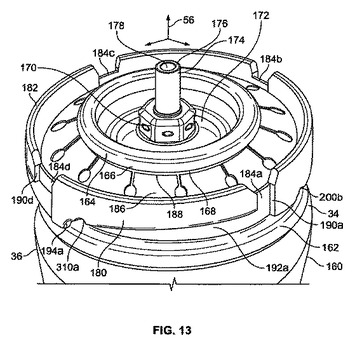
【図13】容器に取付けられた状態の図11のブラケットを示す等角図である。
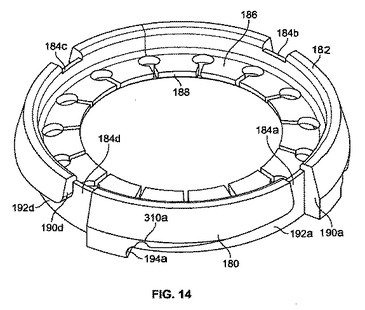
【図14】容器から外された状態の図13のブラケットを示す等角図である。
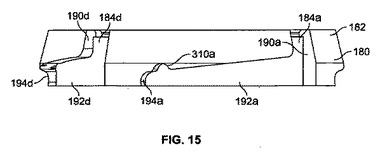
【図15】図14のブラケットを示す正面図である。
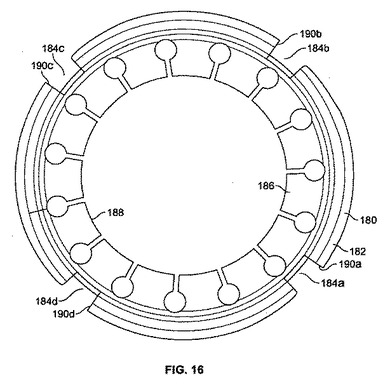
【図16】図14のブラケットを示す上面図である。
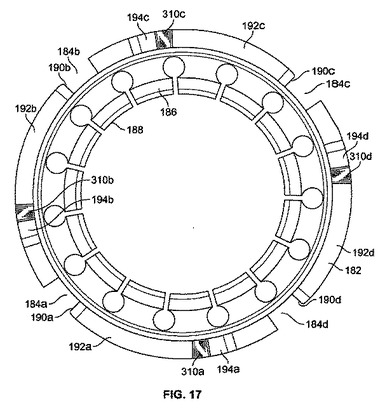
【図17】図14のブラケットを示す底面図である。
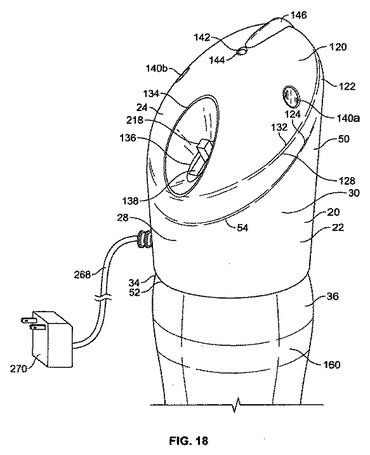
【図18】交流接続子を含む図12に示されたオーバーキャップに類似しているオーバーキャップを示す他の等角図である。
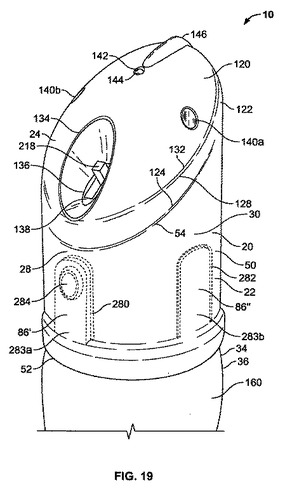
【図19】オーバーキャップの様々な部分上のいくつかのトリガーを示す図1のオーバーキャップの等角図である。
【図20】第1の動作シーケンスによる図1〜図11のオーバーキャップの動作を示す刻時図である。
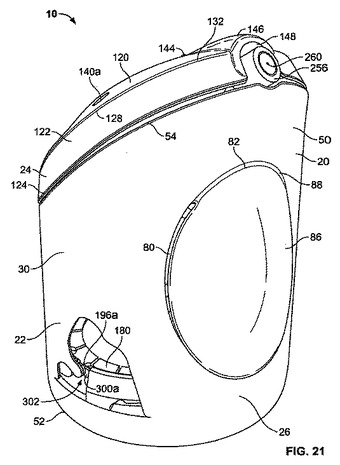
【図21】オーバーキャップの内部上で突起に固定された脆弱タブを示すためにオーバーキャップの一部分が取り除かれている他の実施の形態による図1のオーバーキャップを示す図である。
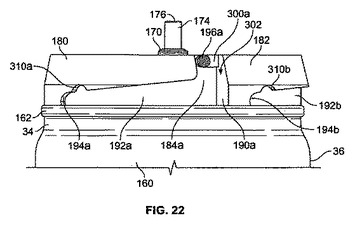
【図22】図21のオーバーキャップの突起に組み合わされた図14のブラケットを示す等角図であって、明確化するためにオーバーキャップが省かれている図である。
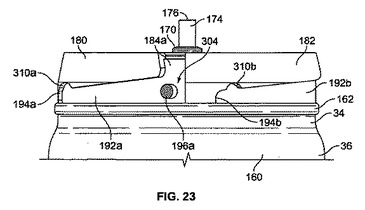
【図23】脆弱タブが破壊された後の第2の位置における突起を示している図22のブラケットの等角図である。
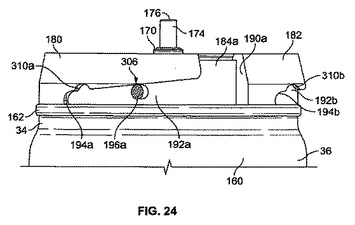
【図24】第3の位置における突起を示している図22のブラケットの等角図である。
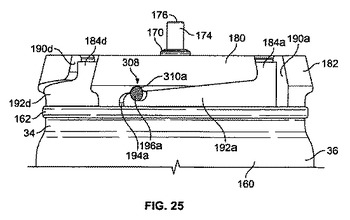
【図25】第4の位置における突起を示している図22のブラケットの等角図である。
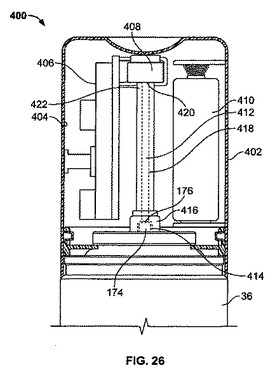
【図26】他の実施の形態によるオーバーキャップを概略的に示す正面部分断面図である。
【発明を実施するための形態】
【0010】
図1〜図11は、筐体20を有するアクチュエータオーバーキャップ10を示している。筐体20は、本体部分22と、その上端部に配置された蓋部24と、を含む。筐体20は、正面26、背面28、対向する左右側面30、32のそれぞれによって略画定されている。オーバーキャップ10は、図12に示されるエアゾール容器36の上端34に保持されるように用いられ、以下により詳細に説明される。オーバーキャップ10により、ユーザは自動的に又は手動的に容器36から流体を送出することができる。オーバーキャップ10は、家庭用、業務用、車両用、屋外用などの多様な環境において使用されるように意図されている。
【0011】
本体部分22は、側壁50を有し、ユーザの手で把持できるように作られている。側壁50は、本体22の下端52からその上端54に沿って延びている。側壁50は、下端52の断面直径が上端54の断面直径よりも小さくなるように、オーバーキャップ10の長手軸56の周囲外方向に先細りにされている。側壁50の正面36は、楕円形の凹部80を含む。凹部80は、側壁50の上端54と下端52のそれぞれに隣接している第1の端部82と第2の端部84(図11参照)を跨ぐ主要直径を含む。凹部80と略同じ範囲で延出するように大きさが決定される楕円形フランジ86が凹部80内に提供されている。フランジ86は、凹部80の第1の端部82に隣接している弾性リビングヒンジ88によって側壁50に接続されている。リビングヒンジ88の厚さは、リビングヒンジ88へ可撓性と弾性を伝達するために、側壁50の他の側面の厚さよりも薄くなっている。
【0012】
蓋部24は、シェル(殻部)120と環状リム122を含む。環状リム122の下端124は、側壁50の上端54に配置され、オーバーキャップ10の横軸126に対して略45°の切頭円錐状になっている。殻部120は、リム122の上端128から延出され、略凸面を形成している。殻部120の凸面は、環状リム122の上端128の円周に沿って延びる楕円形縁部132によって縁取られている。図3〜図6、図8及び図11に示されているように、湾曲空洞134は、オーバーキャップ10の背面28に隣接している殻部120内に配置されている。湾曲空洞134は、矩形スロット138を内部に配置した平らな底部136を含む。二つの穴140a及び140bは、オーバーキャップ10の左右側面30、32のそれぞれに隣接している横軸126の対向側面に配置されている。湾曲空洞134とオーバーキャップ10の正面26の間には、開孔142も提供されている。開孔142内には、光透過性ロッド144が締まり嵌めによって保持されている(図11参照)。開孔142からオーバーキャップ10の正面26に向けて、湾曲畝(リッジ)146が延出している。リッジ146、環状リム122、及びオーバーキャップ10の正面26に隣接している側壁50のそれぞれの部分の内側に、開口148が設けられている。
【0013】
オーバーキャップ10は、特定の条件が発生すると、容器36から流体を放出する。即ち、条件とは、フランジ86によるオーバーキャップ10の手動作動、又はタイマー又はセンサからの信号の応答によるオーバーキャップ10の自動的な作動である。放出される流体は、液体キャリア内で処理される芳香剤又は殺虫剤、脱臭剤などであってよい。流体は、殺菌剤、空気清浄剤、脱臭剤、カビ又は白カビを除去する除黴剤、防虫剤などの他の活性剤、又は、芳香療法(アロマテラピー)特性を有するものを含み得る。或いは、流体は、容器から送出され得る当業者に公知の任意の流体を含む。従って、オーバーキャップ10は、様々な流体配合物をいくらでも送出できるように適合される。
【0014】
図13を見ると、エアゾール容器36は、容器36の上端34の縁を曲げた(クリンプされた)ドーム形の壁部162を有する本体160を含む。開口(図示しない)は、壁部162の上端内に設けられ、壁部162と同様にクリンプされた取付けカップ164によって塞がれている。取付けカップ164は、一般に、円筒形であり、その円周に沿って延出している外壁166を含む。容器36の部分と取付けカップ164のクリンプされた領域の間には、アンダーカット168が設けられている。取付けカップ164の基部172の凹んだ中心部から上方へ弁座170が延出している。容器36の内部に設けられた弁アセンブリ(図示しない)は、弁棒174、弁本体(図示しない)、及び弁バネ(図示しない)を含む。弁棒174は、台座170を介して延出しており、遠位端176は弁座170から離れて上方へ延出しているが、近位端は弁本体内に配置されている。弁アセンブリは、弁棒174を押下げることによって開口され、容器内部と大気の差圧によって、容器36の内容物が、弁棒174のオリフィス178を介して、外へ押出される。本発明の開示は、出願人の発明をエアゾール容器36に関して記載しているが、本発明は、当業者に公知のあらゆるタイプのエアゾール容器に適用できる。また、容器36の内容物は、連続的に又は定量測定によって放出されてもよい。また更に、容器36の内容物の放出はあらゆる方法で実行され得る。例えば、放出には、部分的定量測定による放出又は複数の連続的な放出が含まれる。
【0015】
上述したように、オーバーキャップ10は、容器36の上端34で保持されるように用いられる。図11及び図13〜図17を参照すると、環状ブラケット180を含むこのような保持構造の一つが示されている。ブラケット180は、等距離において離間されたバヨネット式(差込み)スロット184a、184b、184c、184dによって中断される周方向側壁182を含む。ブラケット180は、取付けカップ164に向かって側壁182の内側部から内側径方向に延出する複数の弾性フランジ186を含む。複数のフランジ186の遠位端188は、ブラケット180が容器36の上端34で下向きに押圧された際、取付けカップ164の外壁166周囲で湾曲するように大きさが決定される。十分に下向きに力を掛けることによって、複数のフランジ186の遠位端188がアンダーカット168内へスナップ止めされて、ブラケット180が容器36上で保持される。差込みスロット184a、184b、184c、184dは、側壁182の外面を介して延出する溝190a、190b、190c、190dを含む。また、流路192a、192b、192c、192dは、溝190a、190b、190c、190dのそれぞれから、側壁182の下部の円周に沿って延出している。流路192a〜dの深さは、流路192a〜dが、溝190a〜dから、流路192a、192b、192c、192dの遠位端194a、194b、194c、194dまで、それぞれ、延出するにつれて均等に浅くなる。
【0016】
オーバーキャップ10を容器36に動作可能に配置するために、ユーザは、図7及び図11に示されるラグ(突起)196a、196b、196c、196dを差込みスロット184a、184b、184c、184dに位置合わせする必要がある。突起196a〜dは、本体部分22の内部表面198上で等間隔に離間されており、差込みスロット184a〜dの溝190a〜d内で受け取られるように大きさが決定される。突起196a〜dを溝190a〜d内で受け取ると、ユーザは、オーバーキャップ10を時計回りに回転させて、突起196a〜dを流路192a〜d内へ滑り込ませる。オーバーキャップ10の連続回転動作が、突起196a〜dが流路192a〜dを画定する壁面に衝突させられ、流路192a〜dの深さがだんだん浅くなるにつれて、これらの突起が下方に押下げられる。また、突起196a〜dを押下げることによって、オーバーキャップ10自体が容器36に向けて引き下げられる。その後、以下に詳細に説明されるが、突起196a〜dは流路192a〜dの遠位端194a〜dの適所に解除可能に固定され、オーバーキャップ10を容器36上の動作位置に保持する。
【0017】
ブラケット180が変更可能であることも想定される。例えば、容器の表面と接触させるために、フランジの数をより少なく又はより多く設けてもよい。容器の外部表面の外郭に応じて、ブラケットのフランジは弾性でも剛性でもよい。また、オーバーキャップはブラケットに固定式又は着脱式に動作可能に配置されてよい。更にまた、オーバーキャップは、上記以外の他の方法によって容器上に動作可能に配置され得る。一実施の形態において、オーバーキャップはブラケットに螺合される。異なる実施の形態において、ブラケット又はオーバーキャップの一つ以上の凹部のそれぞれと接触するために一つ以上のタブが設けられる。他の実施の形態において、オーバーキャップの部分がブラケット内へ挿入されて回転され、流路内部又はブラケットの他の固定表面間において、オーバーキャップの部分を固着させる。ブラケットの内部、内側部、又は外部のオーバーキャップを固定する構造において、これらの実施の形態はいずれも変更可能であることが想定される。
【0018】
図7、図8、及び図11は、一対の支柱202aと202bが、側壁50の内部表面198の左側と右側にそれぞれ配置されていることを示している。また、リッジ206は、プラットフォーム(台)208を支持するために用いられる内部表面198の一部周方向に延出している。図7〜図11に示されている本発明の実施の形態の台208は、上に配置された制御回路210を有するプリント回路基板である。他の実施の形態において、制御回路210は、台208から分離した構成部品であり、台208に載置されるか、そうでない場合は、オーバーキャップ10の内部に保持される。台208は、支柱202aと202bのそれぞれに対応している対向側に切欠き212aと212bを設けている。台208がオーバーキャップ10内に固着されている時、台208は、環状リム122に略平行である。ユーザ選択可能スイッチアセンブリ214は、オーバーキャップ10の背面28近傍の台208の上面216上に配置されている。フィンガー218は、スイッチアセンブリ214から上方へ延出されている。また、発光ダイオード(LED)220は、スイッチアセンブリ214と第3の切込み222の間のブラットフォーム208上に配置されている。蓋部24が本体部分22に取付けられる時、オーバーキャップ10内の支柱202aと202bは、殻部120の凸面の穴140a、140bに位置合わせされる。ネジ(図示しない)は、穴140a、140bを通して、支柱202aと202bのそれぞれの中へ延出して、蓋部24を本体部分22へ取付ける。蓋部24が本体部分22へ取付けられると、フィンガー218がスロット136を介して延出されて、ユーザが(以下に詳細に説明される)回路210の様々な動作モードを選択できるようにする。
【0019】
図7及び図9〜11は、上に載置された弁アセンブリ240を含む台208の下面224を示している。本実施の形態の弁アセンブリ240は、ツーウェイ電磁弁を含む。本実施の形態のツーウェイ電磁弁は、インディアナ州、ミシャワカ市のトライテック社(Tri−tech,LLC)製のTri−Tech Miniature Two Way Valve(「トライテックミニチュアツーウェイ弁」)を使用しているが、本発明の範囲を逸脱しない限りにおいて、当業者に公知である他のツーウェイ電磁弁の使用も可能である。ここでは、開示されている実施の形態に関連して、電磁(ソレノイド)弁について説明されているが、当業者に公知である他の機械的及び/又は電気的に制御される弁機構が使用可能であることも想定される。
【0020】
導管246は、第1及び第2の端部248及び250をそれぞれ含み、電磁弁アセンブリ240と流体連通している。第2の端部250は、弁棒174の遠位端176に配置されるように用いられる。より詳細には、上述したように、オーバーキャップ10が容器36に最初に配置される時、突起196a〜dは、差込みスロット184a〜dに位置合わせされる。この位置合わせ手順は、弁棒174の導管246との位置合わせも確実とする。ユーザがオーバーキャップ10を回転させ、突起196a〜dを流路192a〜d内へ押し込むと、オーバーキャップ10が十分な距離だけ引き下げられて、導管246の第2の端部250を弁棒174の遠位端176に衝突させて、容器36の弁アセンブリを開く。弁棒174の遠位端176が導管246の第2の端部250に押圧されると、弁棒174の放出オリフィス178(図13参照)と導管246の流路252(図7)の間に流路ができる。オーバーキャップ10が容器36上に置かれ動作可能な位置へ移動された時の弁棒174の全体的及び/又は部分的な押下げを確実とするために、弁棒174と導管246の間の間隔が調整される。また、弁棒174と導管246の間隔と大きさは、容器36と導管246の間の流体連通を確実にする一方、弁棒174の遠位端176と導管246の第2の端部250の間の接触点における流体の漏洩をほぼ防止できるように、適切に調節される。
【0021】
再び、図7及び図9〜図11を参照すると、電磁弁アセンブリ240は、導管246の第1の端部248と流体連通している。上記のように、オーバーキャップ10が容器36上に配置された時、容器36の弁アセンブリは、開いた状態で保持される。従って、流体は、弁棒174を介して導管246内へ放出される。電磁弁アセンブリ240は、導管246から流体を受け取り、制御回路210によって導管246からの流体の放出を規制する。電磁弁アセンブリ240が、経過タイマー、センサ入力、又は、フランジ86などのトリガーの手動作動の一つ以上からの信号を受信すると、電磁弁アセンブリ240が、所定時間、開かれる。電磁弁アセンブリ240から放出される流体は、ノズル256を通って放出される。本発明の実施の形態において、ノズル256は、容器36の長手軸56に対して角度付けされた第1の位置258(図9〜図11)に配置される。また、ノズル256の放出端部260は、オーバーキャップ10から送出される流体を大気中で方向付けるために提供されている。本発明の実施の形態において、放出端部260は、放出オリフィス262を含み、オーバーキャップ10の正面側36の開口148内部で保持される。また、本発明の実施の形態において、ノズル256の放出端260は、電磁弁アセンブリ240の長手軸264に略平行である。ノズル256及び/又は放出端260は、オーバーキャップ10や電磁弁アセンブリ240の長手軸56、横軸126、長手軸264、又は任意の他の軸に対して角度付けられ配向され得ることが想定される。例えば、図10には、第1の位置258、第2の位置258a、及び第3の位置258bの三つの例が示されている。
【0022】
図9に戻って参照すると、第1と第2の室(コンパートメント)266a及び266bは、蓋部24の内部表面に提供されている。室266a及び266bは共に正と負の電池端末を含む(図示しない)。また、室266a及び266bの各々は、二本の単三電池を嵌合受容するように用いられる。図18に示すように、他の実施の形態において、当業者に公知であるように、単三電池に代えて、適切な電力変圧器と交流/直流変換器270を有する交流電力アダプタ268が使用されてもよい。異なる実施の形態において、電池パックを交流電力引出口に接続するために、単三電池に代えて、電気的リード線を有する充電式ニッケル−カドミウム電池パックが使用されてもよい。また、ここに記載されているオーバーキャップは、電力なしで付勢される、即ち、フランジ86の内部が、フランジ86がユーザによって押下げられると、流体を連続的又は断続的に送出するために、電磁弁アセンブリを物理的に開くように用いられることが想定される。図9は、蓋部24が、環状リム122の下端124を越えて垂れ下がっている複数の弾性部材272を含むことを更に示している。複数の弾性部材272は、側壁50の上端54の内部表面にロック式に係合するように用いられる。
【0023】
図7及び図9〜図11は、手動スイッチ274も台208の下部表面224に設けられることを示している。スイッチ274(図7参照)は、フランジ86の内部表面から延出している作動アーム276に位置合わせされて配置されている。フランジ86がユーザによって押下げられると、作動アーム276がリビングヒンジ88の周りを旋回し、スイッチ274にぶつかる。ユーザがフランジ86を解除すると、作動アーム276は、フランジ86に沿って回転し、アーム276がスイッチ274をもはや触圧しない、又は、オーバーキャップ10を付勢するほどスイッチ274を触圧しない元の動作位置に戻る。第2のアーム278もフランジ86の内部表面に設けられ、押下げ位置又は動作位置にある場合にフランジ86を安定させるために用いられる。リビングヒンジの利用は、オーバーキャップ10を手動的に作動させる簡単な手段をユーザに提供する。
【0024】
リビングヒンジを含むボタン又はトリガーなどのフランジ86に機能的に類似している本実施の形態による他のボタン及び/又はトリガーも使用され得ることが想定される。図19は、オーバーキャップ10がいかにして様々な形状及び/又は配向を有する種々のボタン及び/又はトリガーを含むように変形され得るかを示している。本発明の実施の形態において、段付き環状部分が本体部分22の下端52に隣接して設けられている。一般的に矩形のトリガー86’の例は、本体部分22の背面28の凹部280に隣接している段付き部分から上方に延出される。他の例において、一般的に矩形のボタン86”は、本体部分22と共に延出するように、オーバーキャップ10の左側30の凹部282内を上方に延出する。本実施の形態のトリガー86’とボタン86”は、下端283aと283bのそれぞれの周りで収縮するように用いられ、可撓性を補助するための弱体化又は薄肉化部分を設けている場合もあれば、設けていない場合もある。トリガー86’とボタン86”は、トリガーとボタンが有し得る種々の形状及び位置を一例として示している。実際、ボタン又はアクチュエータは、オーバーキャップ10の周辺のどこに配置されてもよい。また、ボタン又はトリガーは、ボタン又はトリガーの指定された領域にユーザが指を置き易い面を含み、ボタン又はトリガーの作動を補助する。例えば、トリガー86’は、ユーザの指を受け取るように用いられる凹みを有する外方延出部284を含む。全ての実施の形態において、トリガー86’又はボタン86”の内部表面(図示しない)は、オーバーキャップ10の手動動作のためにスイッチ(図示しない)を触圧して作動させるように用いられる。スイッチの作動は、直接的に、又は、上述の作動アーム276に類似し得る作動アーム(図示しない)などの他の手段を介して、行われる。リビングヒンジを有するトリガー又はボタンを使用する利点は、一般的に従来のボタンによる場合に比較してより大きな表面積に対して作動力を付与できることである。また、本発明の実施の形態の筐体は、ユーザに本体部分22を把持させ、ユーザの指の一本以上がボタン又はトリガーに隣接して配置させるように作成され得る。また更に、トリガー又はボタンは、心地よい外観を呈するように幾通りにでも形状化又は寸法決定され得る。
【0025】
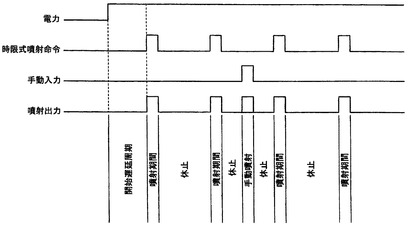
図20は、使用されている状態のオーバーキャップ10の動作を示す刻時図である。まず、オーバーキャップ10は、スイッチアセンブリ214のフィンガー218を「オフ(切)」位置から三つの動作モード286、288、及び290(図8及び図9参照)のいずれか一つへ移動させることによって付勢され、この時点で、オーバーキャップ10は、開始遅延期間に入る。三つの動作モード286、288、及び290の各々は、連続する噴射期間の合間の所定の休止期間間隔に対応している。例えば、第一の動作モード286は、5分の休止期間、第二の動作モード288は、15分の休止期間、及び第三の動作モード290は、30分の休止期間に、それぞれ、対応し得る。本発明の実施例としては、第1の動作モード286が選択されていると仮定する。開始遅延期間が終了すると、電磁弁アセンブリ240が、第1の噴射期間にオーバーキャップ10から流体を放出するように方向付けられる。開始遅延期間は、好ましくは、約3秒間であり、噴射期間は、一般に、約170ミリ秒間である。第1の噴射期間が完了すると、オーバーキャップ10は、5分間継続する第1の休止期間に入る。第1の休止期間が終了すると、電磁弁アセンブリ240が、第2の噴射期間において流体を放出するように作動される。その後、オーバーキャップ10は、5分間継続する第2の休止期間に入る。本発明の実施例において、第2の休止期間は、オーバーキャップ10の手動作動によって中断されるとすぐ、流体は第三の噴射期間において送出される。その後、自動動作は、休止期間と噴射期間を交互に連続的に行われる。休止期間の任意の時間において、ユーザは、フランジ86を押下げることによって、任意の又は一定の期間にわたって、オーバーキャップ10を手動的に作動させることができる。手動的な噴射動作を終了すると、オーバーキャップ10は残りの休止期間を終了し、その後、噴射動作が行われる。他の実施の形態においては、手動的噴射動作の終了に応答して、新しい休止期間が開始される。
【0026】
他の実施の形態において、スイッチアセンブリ214に代えて、光電センサが使用されても補足されてもよい。光電センサは、光源レベルにおける変化を検出するために使用されるが、センサ経路を介して対象物の動作を検出するために使用される場合もある。使用中は、光電センサは、周囲光を集光して、回路によって光度変化を検出させる。光電出力のフィルタリングは、制御回路210によって行われる。制御回路210が、光条件が閾値に達している、例えば、所定レベルの光度変化に達していると判断した場合、回路210は、電磁弁アセンブリ240を作動させるために信号を生成する。例えば、オーバーキャップ10が点灯された浴室に置かれた場合、センサを横切る人が、十分な周囲光量がセンサに達することによって制御回路210が電磁弁アセンブリ240を作動させて流体を放出させることを阻止することもある。当業者に公知である他の動作検出器、例えば、受動赤外線又はパイロ電気動作センサ、赤外線反射動作センサ、超音波動作センサ、又は、レーダやマイクロ波無線動作センサが使用されてもよい。
【0027】
スイッチアセンブリ214に代えて、振動センサ、臭気センサ、熱センサ、又は、当業者に公知の任意の他のセンサが使用されても補足され得ることも想定される。或いは、一つ以上のセンサがスイッチアセンブリ214に代えて又はスイッチアセンブリ214と組み合わされてオーバーキャップ10内に提供され得る。当業者は、ユーザのニーズに応じて、任意のタイプのセンサを単独で、又は、スイッチアセンブリ214及び/又は他のセンサと組み合わせることによって、提供することもできる。特定の実施の形態において、スイッチアセンブリ214とセンサは、同一のオーバーキャップ内に設けられる。このような実施の形態において、ユーザは、オーバーキャップ10の電磁弁アセンブリ240を自動的に作動するためにタイマーベースのスイッチアセンブリ214の使用を選択してもよいし、又は、ユーザは、オーバーキャップ10を作動させる前に任意のイベントを検出するためにセンサの使用を選択することもできる。或いは、オーバーキャップ10は、タイマー及びセンサベースの動作モードを同時に行うこともできる。
【0028】
LED220は、オーバーキャップ10が動作状態にある時に光透過性ロッド144を照らす。LED220は、休止期間において15秒ごとに一回、断続的に点滅する。選択された動作モードに応じて、噴射期間が差し迫るにつれてLED220の点滅回数が増加する。LED220のより頻繁な照射は、オーバーキャップ10が流体の内容物を大気中に放出しつつあることの視覚的表示として作用する。
【0029】
図21〜図25は、オーバーキャップ10が容器36上に動作可能に配置されている第2の方法を示している。本発明の実施の形態において、突起196a〜dは、対応する脆弱(あえて壊れるように作られた)タブによって差込みスロット184a〜d内に保持される。いかにしてオーバーキャップ10が動作位置に配置されるかを図示するために、突起196aを例にとって、突起196aが動作前の位置から動作後位置へ移行するかを参照されたい。図21は、突起196aが、いかにして、本体部分22の内部表面198から内側へ延出し、いかにして、第1の位置又は動作前位置302で脆弱タブ300aによってブラケット180に接続されるかを示している。図22は、オーバーキャップ10の部分を省略することで、動作前位置302にある突起196aの配置をより明確に示している。ユーザがオーバーキャップ10を動作位置に設定したい場合、ユーザは、長手軸56周りでオーバーキャップ10を容器36に向かって下へ押し下げる。オーバーキャップ10を下へ押し下げることによって、脆弱タブ300aが破壊され、突起196aが溝190a内で下へ押下げられ、図23に示されるように、第2の位置304へ押込まれる。その後、ユーザはオーバーキャップ10を時計方向に回転させ、突起196aを押して、流路192aを通過させる。図24は、流路192a内の第3の位置306に配置されて、流路192aを画定する下方傾斜壁面と接触している突起196aを示している。連続回転動作により、突起196aが、オーバーキャップ10を、容器36へ向かって下に押し下げ、図25に示されている動作位置308へ押込む。突起196aは、突起196aを切欠き310aへ入れて保持させることによって動作位置308に置かれる。突起196aは、弁アセンブリの弁バネによって付与される力によって切欠き310a内で保持される。即ち、オーバーキャップ10が容器36に向かって下に押下げられると、弁棒174の遠位端176は、抵抗しながら、導管246の第2の端部250に接触し、容器36からオーバーキャップ10を押し離そうとする。したがって、図23及び図24に示されるように、下方及び回転動作中にこれまで抑制されていた力が、今度は、突起196aを流路192a内で上へ押し上げ、切欠き310a内へ押し込み、突起196aを切欠き310a内で保持し、オーバーキャップ10を動作位置308で保持する。同様に、突起196b、196c、及び196dが動作位置に置かれ、対応する脆弱部分及び切欠き310b、310c、及び310dをそれぞれ含む(図17参照)。本実施の形態は、流体の予期できない送出を防止しながら、オーバーキャップ10を容器36に組み合わせた状態で包装及び/又は運搬することを望む場合に特に有利である。
【0030】
本明細書に記載されている実施の形態のいずれにおいても、ブラケット180は、ユーザが受け取る前に容器に固定されていてもよい。或いは、ユーザがブラケット180を容器に配置してもよい。また、ブラケット180は、脆弱部分によって、オーバーキャップに固定されてもよいし、固定されなくてもよい。ブラケットをオーバーキャップと組み合わせて使用することによって、交換容器があれば、オーバーキャップを再利用でき、及び/又は、ある特定のオーバーキャップでは作動しない容器を不注意に使用することを防ぐに有利となる。このような組み合わせは、施錠機構(ロックアンドキーメカニズム)と呼ばれ、当業者に知られている数多くの利点を有している。例えば、オーバーキャップ10を任意の容器と共に不用意に使用することによって、オーバーキャップ10や容器そのものにダメージを与えるので、ユーザは、容器及びオーバーキャップ10の一つ以上を交換することが必要となる。本明細書に記載されているブラケット180の様々な実施の形態は、垂直又は傾斜作動式の弁棒を含む他のオーバーキャップと組み合わせて使用することも想定される。また、本明細書に記載されているブラケット180の様々な実施の形態は、連続開口状態又は部分開口状態で保持される垂直作動弁棒に組み合わされた弁アセンブリとは異なる作動機構を有する他のオーバーキャップと接続されて使用されてよいことも予想される。例えば、作動機構は、垂直又は傾斜作動弁棒を作動するために用いられる電磁(ソレノイド)、バイメタリック・アクチュエータ、ピエゾ線形モータ、又は電子応答配線を含む駆動装置であってもよい。例えば、ブラケット180は、「Actuator Cap for a Spray Device(噴射装置用アクチュエータキャップ)」と題された米国特許出願(事件整理番号:J−4462、出願日:2007年5月10日)に記載されているいずれのオーバーキャップと組み合わされてもよいことが想定される。なお、当該米国特許文献の全体は、参照することによって本明細書に組み込まれる。
【0031】
図26は、他の実施の形態によるオーバーキャップ400を示している。本実施の形態は、内部表面404を有する円筒形側壁402を含む。制御回路406は、内部表面404に取付けられ、ツーウェイ電磁弁アセンブリ408と電気的に連通している。また、電磁弁アセンブリ408と制御回路406は、二本の単三電池410に電気的に連通しており、単三電池410も同様に、オーバーキャップ400の内部表面404上に保持される。本実施の形態において、管状要素を含む送出部材412は、制御回路406と電池410の間のオーバーキャップ400の内部に提供される。オーバーキャップ400が容器36上に置かれた時、弁棒174の遠位端176は、送出部材412の底端416に隣接して円形開口414内に着座する。ボア(内径)418は、開口414から、送出部材412の上端422内の放出オリフィス420を介して延在する。電磁弁アセンブリ408は、送出部材412の上端422と流体連通される。オーバーキャップ400が容器36に固着された時、送出部材412は、弁棒174と接触して開口位置において弁棒174を保持する。その後、オーバーキャップ400からの流体の放出は、上記同様、制御回路406と電磁弁アセンブリ408によって調節される。
【0032】
本明細書に記載されている実施の形態は、エアゾール容器の弁棒が開口状態で保持され、流体をツーウェイの電磁弁アセンブリへ供給するための様々な方法を例示している。本明細書に記載されている実施の形態の様々な態様、例えば、ノズル256又は送出部材412の大きさや配向が変更され得ることが理解されよう。例えば、オーバーキャップ400における送出部材412は、オーバーキャップ10と容器36の長手軸56にほぼ平行であるが、軸のいずれかと異なる角度を成して延出するように容易に変更され得る。異なる実施例において、ノズル256及び/又は放出端部260は、非円筒形であるか、及び/又は、その全体的又は部分的な長さに沿って変化する断面積を含んでいてもよい。また、異なる例において、放出オリフィス262及び/又は該オリフィスまで延出する導管又は内径は、全体的に又は部分的に非円形であってよい。
[産業上の利用可能性]
【0033】
以上述べた説明を考えると、本発明に対して、数多くの変形が可能であることが当業者にとって明確に理解されよう。従って、この説明は、例示目的ためのみになされ、当業者が本発明を応用し実行するための最良の形態を教示できるように提示されている。添付請求項の範囲を逸脱しない限りにおいて、あらゆる変更が可能であることが理解されよう。
【技術分野】
【0001】
本発明は、一般に、噴射装置から流体を放出することに係り、より詳細には、加圧エアゾール容器から流体を自動的及び手動的に放出するためのアクチュエータに関する。
【背景技術】
【0002】
一般に、エアゾール容器から加圧流体を自動的に送出するための放出装置にはエアゾール容器のノズルと係合するためのアクチュエータ機構が設けられている。いくつかのアクチュエータ機構は、エアゾール容器のノズルを開口位置で保持し、装置内の分離弁を介して流体の放出を調整する。これらの装置のいくつかにおいて、弁は、エアゾール容器の内容物を送出するために電気的に制御されて流路を開閉するソレノイド(電磁)弁を含む。しかしながら、これらの装置の多数は、タイマーやセンサによって自動的に生成される信号とユーザによるトリガーの手動作動によって生成される信号によって電磁弁が開くことを可能にしないという欠点があった。また、手動スイッチを含む装置が、スタンドアローン(独立)型又はユーザの手動によって使用されることを可能とする装置の筐体上に載置される容易に作動可能なトリガーを含んでいなかった。
【0003】
例えば、このような装置には、底壁に設けられた注入口を有する筐体を含むものがある。注入口は、容器の垂直動作可能なバルブステム(弁棒)を受け取り、押下げ開口位置において弁棒を保持して、容器から流体を放出させるように用いられる。バネによってバイアスされる栓を有する電磁弁は、底壁に隣接して配置される。装置が作動すると、栓は、横移動して、流体が、弁座(Valve seat)の開口、出口流路、出力開口を経て、筐体の外へ放出される経路を提供する。
【0004】
異なる例において、放出装置は、エアゾール容器を保持するように用いられる筐体を含む。電磁弁は、容器の放出端と連通しており、容器の放出弁を開口位置で維持する。制御装置は、電磁弁と電気的に接続されて、筐体の放出オリフィスと位置合わせされる放出出口を介して、流体を周期的に放出させる。また、制御装置に電気的に結合され、電磁弁の手動的な作動を可能とする手動スイッチも提供されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
一つの態様によれば、ディスペンサー用アクチュエータキャップは、第1の端部と第2の端部を有する筐体を含み、第1の端部は弁棒を有するエアゾール容器に保持される。容器内の弁アセンブリを開くために、容器の弁棒を受け取り、作動位置で弁棒を保持する注入口を有する導管が提供されている。電磁弁は、導管と放出オリフィスに流体連通し、制御装置から生成された信号によって閉状態から開状態へ切替えられて導管と放出オリフィスの間に流路を形成する。制御装置は、リビングヒンジによって筐体上に保持されているトリガーの手動押下げに応答して、信号を生成する。
【0006】
異なる態様において、ディスペンサー用オーバーキャップは、下端と上端を有する筐体を含み、下端は、弁棒を有するエアゾール容器上に保持される。第1の端部と第2の端部を有する導管が提供されており、第2の端部を画定する導管の部分は、押下げ開口位置において弁棒を保持し、第2の端部は、弁棒の放出オリフィスと流体連通している。電磁弁は、導管の第1の端部と放出オリフィスと流体連通しており、制御装置から生成される信号によって、閉状態から開状態へ切替えられる。制御装置は、リビングヒンジによって筐体で保持されるフランジの手動押下げに応答して、信号を生成する。
【0007】
他の態様において、ディスペンサー用の保持機構が、弁棒を有するエアゾール容器にブラケットを保持するように用いられる複数の内部延出フランジを有する環状ブラケットを含む。更に、ブラケットは、オーバーキャップと解除可能に係合し、オーバーキャップの内部の作動機構を弁棒と位置合わせする。
【0008】
本発明の他の態様及び利点は、以下の詳細な説明を考察することによってより明確に理解されよう。
【図面の簡単な説明】
【0009】
【図1】第1の実施の形態によるオーバーキャップの正面、左側面、及び上面を示す等角図である。
【図2】図1のオーバーキャップを示す正面等角図である。
【図3】図1のオーバーキャップを示す背面図である。
【図4】図1のオーバーキャップを示す左側面図である。
【図5】図1のオーバーキャップを示す右側面図である。
【図6】図1のオーバーキャップを示す平面図である。
【図7】図1のオーバーキャップを示す底面図である。
【図8】図1のオーバーキャップの本体、台、及び上端を示す背面分解等角図である。
【図9】図1のオーバーキャップの本体、台、及び上端を示す正面分解等角図である。
【図10】図8及び図9の台を示す拡大等角図である。
【図11】容器上にオーバーキャップを取付けるための一実施の形態によるブラケットを含む図1のオーバーキャップの線11−11に沿った部分断面図である。
【図12】容器上の図1のオーバーキャップを示す等角図である。
【図13】容器に取付けられた状態の図11のブラケットを示す等角図である。
【図14】容器から外された状態の図13のブラケットを示す等角図である。
【図15】図14のブラケットを示す正面図である。
【図16】図14のブラケットを示す上面図である。
【図17】図14のブラケットを示す底面図である。
【図18】交流接続子を含む図12に示されたオーバーキャップに類似しているオーバーキャップを示す他の等角図である。
【図19】オーバーキャップの様々な部分上のいくつかのトリガーを示す図1のオーバーキャップの等角図である。
【図20】第1の動作シーケンスによる図1〜図11のオーバーキャップの動作を示す刻時図である。
【図21】オーバーキャップの内部上で突起に固定された脆弱タブを示すためにオーバーキャップの一部分が取り除かれている他の実施の形態による図1のオーバーキャップを示す図である。
【図22】図21のオーバーキャップの突起に組み合わされた図14のブラケットを示す等角図であって、明確化するためにオーバーキャップが省かれている図である。
【図23】脆弱タブが破壊された後の第2の位置における突起を示している図22のブラケットの等角図である。
【図24】第3の位置における突起を示している図22のブラケットの等角図である。
【図25】第4の位置における突起を示している図22のブラケットの等角図である。
【図26】他の実施の形態によるオーバーキャップを概略的に示す正面部分断面図である。
【発明を実施するための形態】
【0010】
図1〜図11は、筐体20を有するアクチュエータオーバーキャップ10を示している。筐体20は、本体部分22と、その上端部に配置された蓋部24と、を含む。筐体20は、正面26、背面28、対向する左右側面30、32のそれぞれによって略画定されている。オーバーキャップ10は、図12に示されるエアゾール容器36の上端34に保持されるように用いられ、以下により詳細に説明される。オーバーキャップ10により、ユーザは自動的に又は手動的に容器36から流体を送出することができる。オーバーキャップ10は、家庭用、業務用、車両用、屋外用などの多様な環境において使用されるように意図されている。
【0011】
本体部分22は、側壁50を有し、ユーザの手で把持できるように作られている。側壁50は、本体22の下端52からその上端54に沿って延びている。側壁50は、下端52の断面直径が上端54の断面直径よりも小さくなるように、オーバーキャップ10の長手軸56の周囲外方向に先細りにされている。側壁50の正面36は、楕円形の凹部80を含む。凹部80は、側壁50の上端54と下端52のそれぞれに隣接している第1の端部82と第2の端部84(図11参照)を跨ぐ主要直径を含む。凹部80と略同じ範囲で延出するように大きさが決定される楕円形フランジ86が凹部80内に提供されている。フランジ86は、凹部80の第1の端部82に隣接している弾性リビングヒンジ88によって側壁50に接続されている。リビングヒンジ88の厚さは、リビングヒンジ88へ可撓性と弾性を伝達するために、側壁50の他の側面の厚さよりも薄くなっている。
【0012】
蓋部24は、シェル(殻部)120と環状リム122を含む。環状リム122の下端124は、側壁50の上端54に配置され、オーバーキャップ10の横軸126に対して略45°の切頭円錐状になっている。殻部120は、リム122の上端128から延出され、略凸面を形成している。殻部120の凸面は、環状リム122の上端128の円周に沿って延びる楕円形縁部132によって縁取られている。図3〜図6、図8及び図11に示されているように、湾曲空洞134は、オーバーキャップ10の背面28に隣接している殻部120内に配置されている。湾曲空洞134は、矩形スロット138を内部に配置した平らな底部136を含む。二つの穴140a及び140bは、オーバーキャップ10の左右側面30、32のそれぞれに隣接している横軸126の対向側面に配置されている。湾曲空洞134とオーバーキャップ10の正面26の間には、開孔142も提供されている。開孔142内には、光透過性ロッド144が締まり嵌めによって保持されている(図11参照)。開孔142からオーバーキャップ10の正面26に向けて、湾曲畝(リッジ)146が延出している。リッジ146、環状リム122、及びオーバーキャップ10の正面26に隣接している側壁50のそれぞれの部分の内側に、開口148が設けられている。
【0013】
オーバーキャップ10は、特定の条件が発生すると、容器36から流体を放出する。即ち、条件とは、フランジ86によるオーバーキャップ10の手動作動、又はタイマー又はセンサからの信号の応答によるオーバーキャップ10の自動的な作動である。放出される流体は、液体キャリア内で処理される芳香剤又は殺虫剤、脱臭剤などであってよい。流体は、殺菌剤、空気清浄剤、脱臭剤、カビ又は白カビを除去する除黴剤、防虫剤などの他の活性剤、又は、芳香療法(アロマテラピー)特性を有するものを含み得る。或いは、流体は、容器から送出され得る当業者に公知の任意の流体を含む。従って、オーバーキャップ10は、様々な流体配合物をいくらでも送出できるように適合される。
【0014】
図13を見ると、エアゾール容器36は、容器36の上端34の縁を曲げた(クリンプされた)ドーム形の壁部162を有する本体160を含む。開口(図示しない)は、壁部162の上端内に設けられ、壁部162と同様にクリンプされた取付けカップ164によって塞がれている。取付けカップ164は、一般に、円筒形であり、その円周に沿って延出している外壁166を含む。容器36の部分と取付けカップ164のクリンプされた領域の間には、アンダーカット168が設けられている。取付けカップ164の基部172の凹んだ中心部から上方へ弁座170が延出している。容器36の内部に設けられた弁アセンブリ(図示しない)は、弁棒174、弁本体(図示しない)、及び弁バネ(図示しない)を含む。弁棒174は、台座170を介して延出しており、遠位端176は弁座170から離れて上方へ延出しているが、近位端は弁本体内に配置されている。弁アセンブリは、弁棒174を押下げることによって開口され、容器内部と大気の差圧によって、容器36の内容物が、弁棒174のオリフィス178を介して、外へ押出される。本発明の開示は、出願人の発明をエアゾール容器36に関して記載しているが、本発明は、当業者に公知のあらゆるタイプのエアゾール容器に適用できる。また、容器36の内容物は、連続的に又は定量測定によって放出されてもよい。また更に、容器36の内容物の放出はあらゆる方法で実行され得る。例えば、放出には、部分的定量測定による放出又は複数の連続的な放出が含まれる。
【0015】
上述したように、オーバーキャップ10は、容器36の上端34で保持されるように用いられる。図11及び図13〜図17を参照すると、環状ブラケット180を含むこのような保持構造の一つが示されている。ブラケット180は、等距離において離間されたバヨネット式(差込み)スロット184a、184b、184c、184dによって中断される周方向側壁182を含む。ブラケット180は、取付けカップ164に向かって側壁182の内側部から内側径方向に延出する複数の弾性フランジ186を含む。複数のフランジ186の遠位端188は、ブラケット180が容器36の上端34で下向きに押圧された際、取付けカップ164の外壁166周囲で湾曲するように大きさが決定される。十分に下向きに力を掛けることによって、複数のフランジ186の遠位端188がアンダーカット168内へスナップ止めされて、ブラケット180が容器36上で保持される。差込みスロット184a、184b、184c、184dは、側壁182の外面を介して延出する溝190a、190b、190c、190dを含む。また、流路192a、192b、192c、192dは、溝190a、190b、190c、190dのそれぞれから、側壁182の下部の円周に沿って延出している。流路192a〜dの深さは、流路192a〜dが、溝190a〜dから、流路192a、192b、192c、192dの遠位端194a、194b、194c、194dまで、それぞれ、延出するにつれて均等に浅くなる。
【0016】
オーバーキャップ10を容器36に動作可能に配置するために、ユーザは、図7及び図11に示されるラグ(突起)196a、196b、196c、196dを差込みスロット184a、184b、184c、184dに位置合わせする必要がある。突起196a〜dは、本体部分22の内部表面198上で等間隔に離間されており、差込みスロット184a〜dの溝190a〜d内で受け取られるように大きさが決定される。突起196a〜dを溝190a〜d内で受け取ると、ユーザは、オーバーキャップ10を時計回りに回転させて、突起196a〜dを流路192a〜d内へ滑り込ませる。オーバーキャップ10の連続回転動作が、突起196a〜dが流路192a〜dを画定する壁面に衝突させられ、流路192a〜dの深さがだんだん浅くなるにつれて、これらの突起が下方に押下げられる。また、突起196a〜dを押下げることによって、オーバーキャップ10自体が容器36に向けて引き下げられる。その後、以下に詳細に説明されるが、突起196a〜dは流路192a〜dの遠位端194a〜dの適所に解除可能に固定され、オーバーキャップ10を容器36上の動作位置に保持する。
【0017】
ブラケット180が変更可能であることも想定される。例えば、容器の表面と接触させるために、フランジの数をより少なく又はより多く設けてもよい。容器の外部表面の外郭に応じて、ブラケットのフランジは弾性でも剛性でもよい。また、オーバーキャップはブラケットに固定式又は着脱式に動作可能に配置されてよい。更にまた、オーバーキャップは、上記以外の他の方法によって容器上に動作可能に配置され得る。一実施の形態において、オーバーキャップはブラケットに螺合される。異なる実施の形態において、ブラケット又はオーバーキャップの一つ以上の凹部のそれぞれと接触するために一つ以上のタブが設けられる。他の実施の形態において、オーバーキャップの部分がブラケット内へ挿入されて回転され、流路内部又はブラケットの他の固定表面間において、オーバーキャップの部分を固着させる。ブラケットの内部、内側部、又は外部のオーバーキャップを固定する構造において、これらの実施の形態はいずれも変更可能であることが想定される。
【0018】
図7、図8、及び図11は、一対の支柱202aと202bが、側壁50の内部表面198の左側と右側にそれぞれ配置されていることを示している。また、リッジ206は、プラットフォーム(台)208を支持するために用いられる内部表面198の一部周方向に延出している。図7〜図11に示されている本発明の実施の形態の台208は、上に配置された制御回路210を有するプリント回路基板である。他の実施の形態において、制御回路210は、台208から分離した構成部品であり、台208に載置されるか、そうでない場合は、オーバーキャップ10の内部に保持される。台208は、支柱202aと202bのそれぞれに対応している対向側に切欠き212aと212bを設けている。台208がオーバーキャップ10内に固着されている時、台208は、環状リム122に略平行である。ユーザ選択可能スイッチアセンブリ214は、オーバーキャップ10の背面28近傍の台208の上面216上に配置されている。フィンガー218は、スイッチアセンブリ214から上方へ延出されている。また、発光ダイオード(LED)220は、スイッチアセンブリ214と第3の切込み222の間のブラットフォーム208上に配置されている。蓋部24が本体部分22に取付けられる時、オーバーキャップ10内の支柱202aと202bは、殻部120の凸面の穴140a、140bに位置合わせされる。ネジ(図示しない)は、穴140a、140bを通して、支柱202aと202bのそれぞれの中へ延出して、蓋部24を本体部分22へ取付ける。蓋部24が本体部分22へ取付けられると、フィンガー218がスロット136を介して延出されて、ユーザが(以下に詳細に説明される)回路210の様々な動作モードを選択できるようにする。
【0019】
図7及び図9〜11は、上に載置された弁アセンブリ240を含む台208の下面224を示している。本実施の形態の弁アセンブリ240は、ツーウェイ電磁弁を含む。本実施の形態のツーウェイ電磁弁は、インディアナ州、ミシャワカ市のトライテック社(Tri−tech,LLC)製のTri−Tech Miniature Two Way Valve(「トライテックミニチュアツーウェイ弁」)を使用しているが、本発明の範囲を逸脱しない限りにおいて、当業者に公知である他のツーウェイ電磁弁の使用も可能である。ここでは、開示されている実施の形態に関連して、電磁(ソレノイド)弁について説明されているが、当業者に公知である他の機械的及び/又は電気的に制御される弁機構が使用可能であることも想定される。
【0020】
導管246は、第1及び第2の端部248及び250をそれぞれ含み、電磁弁アセンブリ240と流体連通している。第2の端部250は、弁棒174の遠位端176に配置されるように用いられる。より詳細には、上述したように、オーバーキャップ10が容器36に最初に配置される時、突起196a〜dは、差込みスロット184a〜dに位置合わせされる。この位置合わせ手順は、弁棒174の導管246との位置合わせも確実とする。ユーザがオーバーキャップ10を回転させ、突起196a〜dを流路192a〜d内へ押し込むと、オーバーキャップ10が十分な距離だけ引き下げられて、導管246の第2の端部250を弁棒174の遠位端176に衝突させて、容器36の弁アセンブリを開く。弁棒174の遠位端176が導管246の第2の端部250に押圧されると、弁棒174の放出オリフィス178(図13参照)と導管246の流路252(図7)の間に流路ができる。オーバーキャップ10が容器36上に置かれ動作可能な位置へ移動された時の弁棒174の全体的及び/又は部分的な押下げを確実とするために、弁棒174と導管246の間の間隔が調整される。また、弁棒174と導管246の間隔と大きさは、容器36と導管246の間の流体連通を確実にする一方、弁棒174の遠位端176と導管246の第2の端部250の間の接触点における流体の漏洩をほぼ防止できるように、適切に調節される。
【0021】
再び、図7及び図9〜図11を参照すると、電磁弁アセンブリ240は、導管246の第1の端部248と流体連通している。上記のように、オーバーキャップ10が容器36上に配置された時、容器36の弁アセンブリは、開いた状態で保持される。従って、流体は、弁棒174を介して導管246内へ放出される。電磁弁アセンブリ240は、導管246から流体を受け取り、制御回路210によって導管246からの流体の放出を規制する。電磁弁アセンブリ240が、経過タイマー、センサ入力、又は、フランジ86などのトリガーの手動作動の一つ以上からの信号を受信すると、電磁弁アセンブリ240が、所定時間、開かれる。電磁弁アセンブリ240から放出される流体は、ノズル256を通って放出される。本発明の実施の形態において、ノズル256は、容器36の長手軸56に対して角度付けされた第1の位置258(図9〜図11)に配置される。また、ノズル256の放出端部260は、オーバーキャップ10から送出される流体を大気中で方向付けるために提供されている。本発明の実施の形態において、放出端部260は、放出オリフィス262を含み、オーバーキャップ10の正面側36の開口148内部で保持される。また、本発明の実施の形態において、ノズル256の放出端260は、電磁弁アセンブリ240の長手軸264に略平行である。ノズル256及び/又は放出端260は、オーバーキャップ10や電磁弁アセンブリ240の長手軸56、横軸126、長手軸264、又は任意の他の軸に対して角度付けられ配向され得ることが想定される。例えば、図10には、第1の位置258、第2の位置258a、及び第3の位置258bの三つの例が示されている。
【0022】
図9に戻って参照すると、第1と第2の室(コンパートメント)266a及び266bは、蓋部24の内部表面に提供されている。室266a及び266bは共に正と負の電池端末を含む(図示しない)。また、室266a及び266bの各々は、二本の単三電池を嵌合受容するように用いられる。図18に示すように、他の実施の形態において、当業者に公知であるように、単三電池に代えて、適切な電力変圧器と交流/直流変換器270を有する交流電力アダプタ268が使用されてもよい。異なる実施の形態において、電池パックを交流電力引出口に接続するために、単三電池に代えて、電気的リード線を有する充電式ニッケル−カドミウム電池パックが使用されてもよい。また、ここに記載されているオーバーキャップは、電力なしで付勢される、即ち、フランジ86の内部が、フランジ86がユーザによって押下げられると、流体を連続的又は断続的に送出するために、電磁弁アセンブリを物理的に開くように用いられることが想定される。図9は、蓋部24が、環状リム122の下端124を越えて垂れ下がっている複数の弾性部材272を含むことを更に示している。複数の弾性部材272は、側壁50の上端54の内部表面にロック式に係合するように用いられる。
【0023】
図7及び図9〜図11は、手動スイッチ274も台208の下部表面224に設けられることを示している。スイッチ274(図7参照)は、フランジ86の内部表面から延出している作動アーム276に位置合わせされて配置されている。フランジ86がユーザによって押下げられると、作動アーム276がリビングヒンジ88の周りを旋回し、スイッチ274にぶつかる。ユーザがフランジ86を解除すると、作動アーム276は、フランジ86に沿って回転し、アーム276がスイッチ274をもはや触圧しない、又は、オーバーキャップ10を付勢するほどスイッチ274を触圧しない元の動作位置に戻る。第2のアーム278もフランジ86の内部表面に設けられ、押下げ位置又は動作位置にある場合にフランジ86を安定させるために用いられる。リビングヒンジの利用は、オーバーキャップ10を手動的に作動させる簡単な手段をユーザに提供する。
【0024】
リビングヒンジを含むボタン又はトリガーなどのフランジ86に機能的に類似している本実施の形態による他のボタン及び/又はトリガーも使用され得ることが想定される。図19は、オーバーキャップ10がいかにして様々な形状及び/又は配向を有する種々のボタン及び/又はトリガーを含むように変形され得るかを示している。本発明の実施の形態において、段付き環状部分が本体部分22の下端52に隣接して設けられている。一般的に矩形のトリガー86’の例は、本体部分22の背面28の凹部280に隣接している段付き部分から上方に延出される。他の例において、一般的に矩形のボタン86”は、本体部分22と共に延出するように、オーバーキャップ10の左側30の凹部282内を上方に延出する。本実施の形態のトリガー86’とボタン86”は、下端283aと283bのそれぞれの周りで収縮するように用いられ、可撓性を補助するための弱体化又は薄肉化部分を設けている場合もあれば、設けていない場合もある。トリガー86’とボタン86”は、トリガーとボタンが有し得る種々の形状及び位置を一例として示している。実際、ボタン又はアクチュエータは、オーバーキャップ10の周辺のどこに配置されてもよい。また、ボタン又はトリガーは、ボタン又はトリガーの指定された領域にユーザが指を置き易い面を含み、ボタン又はトリガーの作動を補助する。例えば、トリガー86’は、ユーザの指を受け取るように用いられる凹みを有する外方延出部284を含む。全ての実施の形態において、トリガー86’又はボタン86”の内部表面(図示しない)は、オーバーキャップ10の手動動作のためにスイッチ(図示しない)を触圧して作動させるように用いられる。スイッチの作動は、直接的に、又は、上述の作動アーム276に類似し得る作動アーム(図示しない)などの他の手段を介して、行われる。リビングヒンジを有するトリガー又はボタンを使用する利点は、一般的に従来のボタンによる場合に比較してより大きな表面積に対して作動力を付与できることである。また、本発明の実施の形態の筐体は、ユーザに本体部分22を把持させ、ユーザの指の一本以上がボタン又はトリガーに隣接して配置させるように作成され得る。また更に、トリガー又はボタンは、心地よい外観を呈するように幾通りにでも形状化又は寸法決定され得る。
【0025】
図20は、使用されている状態のオーバーキャップ10の動作を示す刻時図である。まず、オーバーキャップ10は、スイッチアセンブリ214のフィンガー218を「オフ(切)」位置から三つの動作モード286、288、及び290(図8及び図9参照)のいずれか一つへ移動させることによって付勢され、この時点で、オーバーキャップ10は、開始遅延期間に入る。三つの動作モード286、288、及び290の各々は、連続する噴射期間の合間の所定の休止期間間隔に対応している。例えば、第一の動作モード286は、5分の休止期間、第二の動作モード288は、15分の休止期間、及び第三の動作モード290は、30分の休止期間に、それぞれ、対応し得る。本発明の実施例としては、第1の動作モード286が選択されていると仮定する。開始遅延期間が終了すると、電磁弁アセンブリ240が、第1の噴射期間にオーバーキャップ10から流体を放出するように方向付けられる。開始遅延期間は、好ましくは、約3秒間であり、噴射期間は、一般に、約170ミリ秒間である。第1の噴射期間が完了すると、オーバーキャップ10は、5分間継続する第1の休止期間に入る。第1の休止期間が終了すると、電磁弁アセンブリ240が、第2の噴射期間において流体を放出するように作動される。その後、オーバーキャップ10は、5分間継続する第2の休止期間に入る。本発明の実施例において、第2の休止期間は、オーバーキャップ10の手動作動によって中断されるとすぐ、流体は第三の噴射期間において送出される。その後、自動動作は、休止期間と噴射期間を交互に連続的に行われる。休止期間の任意の時間において、ユーザは、フランジ86を押下げることによって、任意の又は一定の期間にわたって、オーバーキャップ10を手動的に作動させることができる。手動的な噴射動作を終了すると、オーバーキャップ10は残りの休止期間を終了し、その後、噴射動作が行われる。他の実施の形態においては、手動的噴射動作の終了に応答して、新しい休止期間が開始される。
【0026】
他の実施の形態において、スイッチアセンブリ214に代えて、光電センサが使用されても補足されてもよい。光電センサは、光源レベルにおける変化を検出するために使用されるが、センサ経路を介して対象物の動作を検出するために使用される場合もある。使用中は、光電センサは、周囲光を集光して、回路によって光度変化を検出させる。光電出力のフィルタリングは、制御回路210によって行われる。制御回路210が、光条件が閾値に達している、例えば、所定レベルの光度変化に達していると判断した場合、回路210は、電磁弁アセンブリ240を作動させるために信号を生成する。例えば、オーバーキャップ10が点灯された浴室に置かれた場合、センサを横切る人が、十分な周囲光量がセンサに達することによって制御回路210が電磁弁アセンブリ240を作動させて流体を放出させることを阻止することもある。当業者に公知である他の動作検出器、例えば、受動赤外線又はパイロ電気動作センサ、赤外線反射動作センサ、超音波動作センサ、又は、レーダやマイクロ波無線動作センサが使用されてもよい。
【0027】
スイッチアセンブリ214に代えて、振動センサ、臭気センサ、熱センサ、又は、当業者に公知の任意の他のセンサが使用されても補足され得ることも想定される。或いは、一つ以上のセンサがスイッチアセンブリ214に代えて又はスイッチアセンブリ214と組み合わされてオーバーキャップ10内に提供され得る。当業者は、ユーザのニーズに応じて、任意のタイプのセンサを単独で、又は、スイッチアセンブリ214及び/又は他のセンサと組み合わせることによって、提供することもできる。特定の実施の形態において、スイッチアセンブリ214とセンサは、同一のオーバーキャップ内に設けられる。このような実施の形態において、ユーザは、オーバーキャップ10の電磁弁アセンブリ240を自動的に作動するためにタイマーベースのスイッチアセンブリ214の使用を選択してもよいし、又は、ユーザは、オーバーキャップ10を作動させる前に任意のイベントを検出するためにセンサの使用を選択することもできる。或いは、オーバーキャップ10は、タイマー及びセンサベースの動作モードを同時に行うこともできる。
【0028】
LED220は、オーバーキャップ10が動作状態にある時に光透過性ロッド144を照らす。LED220は、休止期間において15秒ごとに一回、断続的に点滅する。選択された動作モードに応じて、噴射期間が差し迫るにつれてLED220の点滅回数が増加する。LED220のより頻繁な照射は、オーバーキャップ10が流体の内容物を大気中に放出しつつあることの視覚的表示として作用する。
【0029】
図21〜図25は、オーバーキャップ10が容器36上に動作可能に配置されている第2の方法を示している。本発明の実施の形態において、突起196a〜dは、対応する脆弱(あえて壊れるように作られた)タブによって差込みスロット184a〜d内に保持される。いかにしてオーバーキャップ10が動作位置に配置されるかを図示するために、突起196aを例にとって、突起196aが動作前の位置から動作後位置へ移行するかを参照されたい。図21は、突起196aが、いかにして、本体部分22の内部表面198から内側へ延出し、いかにして、第1の位置又は動作前位置302で脆弱タブ300aによってブラケット180に接続されるかを示している。図22は、オーバーキャップ10の部分を省略することで、動作前位置302にある突起196aの配置をより明確に示している。ユーザがオーバーキャップ10を動作位置に設定したい場合、ユーザは、長手軸56周りでオーバーキャップ10を容器36に向かって下へ押し下げる。オーバーキャップ10を下へ押し下げることによって、脆弱タブ300aが破壊され、突起196aが溝190a内で下へ押下げられ、図23に示されるように、第2の位置304へ押込まれる。その後、ユーザはオーバーキャップ10を時計方向に回転させ、突起196aを押して、流路192aを通過させる。図24は、流路192a内の第3の位置306に配置されて、流路192aを画定する下方傾斜壁面と接触している突起196aを示している。連続回転動作により、突起196aが、オーバーキャップ10を、容器36へ向かって下に押し下げ、図25に示されている動作位置308へ押込む。突起196aは、突起196aを切欠き310aへ入れて保持させることによって動作位置308に置かれる。突起196aは、弁アセンブリの弁バネによって付与される力によって切欠き310a内で保持される。即ち、オーバーキャップ10が容器36に向かって下に押下げられると、弁棒174の遠位端176は、抵抗しながら、導管246の第2の端部250に接触し、容器36からオーバーキャップ10を押し離そうとする。したがって、図23及び図24に示されるように、下方及び回転動作中にこれまで抑制されていた力が、今度は、突起196aを流路192a内で上へ押し上げ、切欠き310a内へ押し込み、突起196aを切欠き310a内で保持し、オーバーキャップ10を動作位置308で保持する。同様に、突起196b、196c、及び196dが動作位置に置かれ、対応する脆弱部分及び切欠き310b、310c、及び310dをそれぞれ含む(図17参照)。本実施の形態は、流体の予期できない送出を防止しながら、オーバーキャップ10を容器36に組み合わせた状態で包装及び/又は運搬することを望む場合に特に有利である。
【0030】
本明細書に記載されている実施の形態のいずれにおいても、ブラケット180は、ユーザが受け取る前に容器に固定されていてもよい。或いは、ユーザがブラケット180を容器に配置してもよい。また、ブラケット180は、脆弱部分によって、オーバーキャップに固定されてもよいし、固定されなくてもよい。ブラケットをオーバーキャップと組み合わせて使用することによって、交換容器があれば、オーバーキャップを再利用でき、及び/又は、ある特定のオーバーキャップでは作動しない容器を不注意に使用することを防ぐに有利となる。このような組み合わせは、施錠機構(ロックアンドキーメカニズム)と呼ばれ、当業者に知られている数多くの利点を有している。例えば、オーバーキャップ10を任意の容器と共に不用意に使用することによって、オーバーキャップ10や容器そのものにダメージを与えるので、ユーザは、容器及びオーバーキャップ10の一つ以上を交換することが必要となる。本明細書に記載されているブラケット180の様々な実施の形態は、垂直又は傾斜作動式の弁棒を含む他のオーバーキャップと組み合わせて使用することも想定される。また、本明細書に記載されているブラケット180の様々な実施の形態は、連続開口状態又は部分開口状態で保持される垂直作動弁棒に組み合わされた弁アセンブリとは異なる作動機構を有する他のオーバーキャップと接続されて使用されてよいことも予想される。例えば、作動機構は、垂直又は傾斜作動弁棒を作動するために用いられる電磁(ソレノイド)、バイメタリック・アクチュエータ、ピエゾ線形モータ、又は電子応答配線を含む駆動装置であってもよい。例えば、ブラケット180は、「Actuator Cap for a Spray Device(噴射装置用アクチュエータキャップ)」と題された米国特許出願(事件整理番号:J−4462、出願日:2007年5月10日)に記載されているいずれのオーバーキャップと組み合わされてもよいことが想定される。なお、当該米国特許文献の全体は、参照することによって本明細書に組み込まれる。
【0031】
図26は、他の実施の形態によるオーバーキャップ400を示している。本実施の形態は、内部表面404を有する円筒形側壁402を含む。制御回路406は、内部表面404に取付けられ、ツーウェイ電磁弁アセンブリ408と電気的に連通している。また、電磁弁アセンブリ408と制御回路406は、二本の単三電池410に電気的に連通しており、単三電池410も同様に、オーバーキャップ400の内部表面404上に保持される。本実施の形態において、管状要素を含む送出部材412は、制御回路406と電池410の間のオーバーキャップ400の内部に提供される。オーバーキャップ400が容器36上に置かれた時、弁棒174の遠位端176は、送出部材412の底端416に隣接して円形開口414内に着座する。ボア(内径)418は、開口414から、送出部材412の上端422内の放出オリフィス420を介して延在する。電磁弁アセンブリ408は、送出部材412の上端422と流体連通される。オーバーキャップ400が容器36に固着された時、送出部材412は、弁棒174と接触して開口位置において弁棒174を保持する。その後、オーバーキャップ400からの流体の放出は、上記同様、制御回路406と電磁弁アセンブリ408によって調節される。
【0032】
本明細書に記載されている実施の形態は、エアゾール容器の弁棒が開口状態で保持され、流体をツーウェイの電磁弁アセンブリへ供給するための様々な方法を例示している。本明細書に記載されている実施の形態の様々な態様、例えば、ノズル256又は送出部材412の大きさや配向が変更され得ることが理解されよう。例えば、オーバーキャップ400における送出部材412は、オーバーキャップ10と容器36の長手軸56にほぼ平行であるが、軸のいずれかと異なる角度を成して延出するように容易に変更され得る。異なる実施例において、ノズル256及び/又は放出端部260は、非円筒形であるか、及び/又は、その全体的又は部分的な長さに沿って変化する断面積を含んでいてもよい。また、異なる例において、放出オリフィス262及び/又は該オリフィスまで延出する導管又は内径は、全体的に又は部分的に非円形であってよい。
[産業上の利用可能性]
【0033】
以上述べた説明を考えると、本発明に対して、数多くの変形が可能であることが当業者にとって明確に理解されよう。従って、この説明は、例示目的ためのみになされ、当業者が本発明を応用し実行するための最良の形態を教示できるように提示されている。添付請求項の範囲を逸脱しない限りにおいて、あらゆる変更が可能であることが理解されよう。
【特許請求の範囲】
【請求項1】
ディスペンサー用アクチュエータキャップであって、
第1の端部と第2の端部を有する筐体であって、前記第1の端部が弁棒を有するエアゾール容器に保持される、前記筐体と、
前記容器の前記弁棒を受け取り、作動位置で前記弁棒を保持して前記容器内の弁アセンブリを開く注入口を有する導管と、
前記導管と放出オリフィスに流体連通している電磁弁であって、制御装置から生成される信号によって閉状態から開状態へ切り替えられ、前記導管と前記放出オリフィスの間に流路を提供する、前記電磁弁と、
を含み、
前記制御装置が、リビングヒンジによって前記筐体に保持されたトリガーの手動押下げに応答して、前記信号を生成する、
アクチュエータキャップ。
【請求項2】
前記筐体が容器に着脱可能に取付けられる、請求項1に記載のアクチュエータキャップ。
【請求項3】
前記制御装置が更にタイマーに応答して信号を生成する、請求項1に記載のアクチュエータキャップ。
【請求項4】
前記制御装置が更にセンサに応答して信号を生成する、請求項1に記載のアクチュエータキャップ。
【請求項5】
前記センサが光電センサである、請求項4に記載のアクチュエータキャップ。
【請求項6】
前記トリガーがアクチュエータアームを含む、請求項1に記載のアクチュエータキャップ。
【請求項7】
前記アクチュエータアームが、動作位置でスイッチと接触して前記信号を生成する、請求項6に記載のアクチュエータキャップ。
【請求項8】
ディスペンサー用オーバーキャップであって、
下端と上端を有する筐体であって、前記下端が弁棒を有するエアゾール容器に保持されている、前記筐体と、
第1の端部と第2の端部を有する導管であって、前記第2の端部を画定する前記導管の部分が押下げ開口位置において前記弁棒を保持し、前記第2の端部が前記弁棒の放出オリフィスと流体連通している、前記導管と、
前記導管の第1の端部と放出オリフィスに流体連通している電磁弁であって、制御装置から生成される信号によって閉状態から開状態へ切り替えられる、前記電磁弁と、
を含み、
前記制御装置が、リビングヒンジによって前記筐体に保持されたフランジの手動押下げに応答して、前記信号を生成する、
オーバーキャップ。
【請求項9】
前記導管が、完全開口位置において前記弁棒を保持する、請求項8に記載のオーバーキャップ。
【請求項10】
前記導管が、部分開口位置において前記弁棒を保持する、請求項8に記載のオーバーキャップ。
【請求項11】
前記弁棒が、前記容器の長手軸に対して垂直に作動可能である、請求項8に記載のオーバーキャップ。
【請求項12】
前記制御装置が、更に、タイマーに応答して信号を生成する、請求項8に記載のアクチュエータキャップ。
【請求項13】
前記制御装置が、更に、センサに応答して信号を生成する、請求項8に記載のアクチュエータキャップ。
【請求項14】
前記センサが光電センサである、請求項13に記載のアクチュエータキャップ。
【請求項15】
複数の内部延出フランジを有する環状ブラケットであって、前記内部延出フランジが弁棒を有するエアゾール容器に前記ブラケットを保持する、前記環状ブラケットを含み、
前記ブラケットが、更に、オーバーキャップと解除可能に係合し、前記オーバーキャップの内部の作動機構を前記弁棒と位置合わせする、
ディスペンサー用の保持機構。
【請求項16】
前記オーバーキャップは、弁棒を受け取って作動位置で前記弁棒を保持する注入口を有する導管を含み、前記オーバーキャップが前記環状ブラケットと係合した時及び前記環状ブラケットが前記容器に配置された時に容器内部の弁アセンブリを開く、
請求項15に記載の保持機構。
【請求項17】
前記オーバーキャップの前記作動機構が前記導管と放出オリフィスと流体連通している電磁弁であって、前記電磁弁が、制御装置から生成される信号によって閉状態から開状態へ切り替えられて前記導管と前記放出オリフィスの間に流路を形成する、請求項16に記載の保持機構。
【請求項18】
前記ブラケットが前記オーバーキャップと解除可能に係合する手段を含む、請求項15に記載の保持機構。
【請求項19】
少なくとも一つの突起が、前記ブラケット内の少なくとも一つの差込みスロットと連通している前記オーバーキャップの内壁に設けられている、請求項15に記載の保持機構。
【請求項20】
前記少なくとも一つの突起が、脆弱部によって前記差込みスロット内に保持されている、請求項19に記載の保持機構。
【請求項1】
ディスペンサー用アクチュエータキャップであって、
第1の端部と第2の端部を有する筐体であって、前記第1の端部が弁棒を有するエアゾール容器に保持される、前記筐体と、
前記容器の前記弁棒を受け取り、作動位置で前記弁棒を保持して前記容器内の弁アセンブリを開く注入口を有する導管と、
前記導管と放出オリフィスに流体連通している電磁弁であって、制御装置から生成される信号によって閉状態から開状態へ切り替えられ、前記導管と前記放出オリフィスの間に流路を提供する、前記電磁弁と、
を含み、
前記制御装置が、リビングヒンジによって前記筐体に保持されたトリガーの手動押下げに応答して、前記信号を生成する、
アクチュエータキャップ。
【請求項2】
前記筐体が容器に着脱可能に取付けられる、請求項1に記載のアクチュエータキャップ。
【請求項3】
前記制御装置が更にタイマーに応答して信号を生成する、請求項1に記載のアクチュエータキャップ。
【請求項4】
前記制御装置が更にセンサに応答して信号を生成する、請求項1に記載のアクチュエータキャップ。
【請求項5】
前記センサが光電センサである、請求項4に記載のアクチュエータキャップ。
【請求項6】
前記トリガーがアクチュエータアームを含む、請求項1に記載のアクチュエータキャップ。
【請求項7】
前記アクチュエータアームが、動作位置でスイッチと接触して前記信号を生成する、請求項6に記載のアクチュエータキャップ。
【請求項8】
ディスペンサー用オーバーキャップであって、
下端と上端を有する筐体であって、前記下端が弁棒を有するエアゾール容器に保持されている、前記筐体と、
第1の端部と第2の端部を有する導管であって、前記第2の端部を画定する前記導管の部分が押下げ開口位置において前記弁棒を保持し、前記第2の端部が前記弁棒の放出オリフィスと流体連通している、前記導管と、
前記導管の第1の端部と放出オリフィスに流体連通している電磁弁であって、制御装置から生成される信号によって閉状態から開状態へ切り替えられる、前記電磁弁と、
を含み、
前記制御装置が、リビングヒンジによって前記筐体に保持されたフランジの手動押下げに応答して、前記信号を生成する、
オーバーキャップ。
【請求項9】
前記導管が、完全開口位置において前記弁棒を保持する、請求項8に記載のオーバーキャップ。
【請求項10】
前記導管が、部分開口位置において前記弁棒を保持する、請求項8に記載のオーバーキャップ。
【請求項11】
前記弁棒が、前記容器の長手軸に対して垂直に作動可能である、請求項8に記載のオーバーキャップ。
【請求項12】
前記制御装置が、更に、タイマーに応答して信号を生成する、請求項8に記載のアクチュエータキャップ。
【請求項13】
前記制御装置が、更に、センサに応答して信号を生成する、請求項8に記載のアクチュエータキャップ。
【請求項14】
前記センサが光電センサである、請求項13に記載のアクチュエータキャップ。
【請求項15】
複数の内部延出フランジを有する環状ブラケットであって、前記内部延出フランジが弁棒を有するエアゾール容器に前記ブラケットを保持する、前記環状ブラケットを含み、
前記ブラケットが、更に、オーバーキャップと解除可能に係合し、前記オーバーキャップの内部の作動機構を前記弁棒と位置合わせする、
ディスペンサー用の保持機構。
【請求項16】
前記オーバーキャップは、弁棒を受け取って作動位置で前記弁棒を保持する注入口を有する導管を含み、前記オーバーキャップが前記環状ブラケットと係合した時及び前記環状ブラケットが前記容器に配置された時に容器内部の弁アセンブリを開く、
請求項15に記載の保持機構。
【請求項17】
前記オーバーキャップの前記作動機構が前記導管と放出オリフィスと流体連通している電磁弁であって、前記電磁弁が、制御装置から生成される信号によって閉状態から開状態へ切り替えられて前記導管と前記放出オリフィスの間に流路を形成する、請求項16に記載の保持機構。
【請求項18】
前記ブラケットが前記オーバーキャップと解除可能に係合する手段を含む、請求項15に記載の保持機構。
【請求項19】
少なくとも一つの突起が、前記ブラケット内の少なくとも一つの差込みスロットと連通している前記オーバーキャップの内壁に設けられている、請求項15に記載の保持機構。
【請求項20】
前記少なくとも一つの突起が、脆弱部によって前記差込みスロット内に保持されている、請求項19に記載の保持機構。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公表番号】特表2010−531275(P2010−531275A)
【公表日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2010−510290(P2010−510290)
【出願日】平成20年5月19日(2008.5.19)
【国際出願番号】PCT/US2008/006395
【国際公開番号】WO2008/153678
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(500106743)エス.シー. ジョンソン アンド サン、インコーポレイテッド (168)
【Fターム(参考)】
【公表日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成20年5月19日(2008.5.19)
【国際出願番号】PCT/US2008/006395
【国際公開番号】WO2008/153678
【国際公開日】平成20年12月18日(2008.12.18)
【出願人】(500106743)エス.シー. ジョンソン アンド サン、インコーポレイテッド (168)
【Fターム(参考)】
[ Back to top ]