
噴水装置、及び噴水装置におけるノズルの衝突防止方法
【課題】各ノズルの衝突防止及び/又は各ノズルから噴射される水流同士の衝突を回避することで、各ノズルが損傷する不具合や、水流が散乱して美観を損ねる不具合を防止する。
【解決手段】Y軸衝突条件判定部47は、X軸衝突条件判定部45を介して基準角との比較部35から通知される回転角度データθに係わる判断の結果と、左隣ノズル位置判定部43から通知される判定の結果とに基づき、基準となるノズル12と、その左隣のノズル11とが衝突する条件を充足しているかどうか判定する。その判定の結果を例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で、補正量生成部41に通知する。Y軸衝突条件判定部47による上記判定は、例えば所定の算式が満足されるかどうかをチェックすることによって行われる。
【解決手段】Y軸衝突条件判定部47は、X軸衝突条件判定部45を介して基準角との比較部35から通知される回転角度データθに係わる判断の結果と、左隣ノズル位置判定部43から通知される判定の結果とに基づき、基準となるノズル12と、その左隣のノズル11とが衝突する条件を充足しているかどうか判定する。その判定の結果を例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で、補正量生成部41に通知する。Y軸衝突条件判定部47による上記判定は、例えば所定の算式が満足されるかどうかをチェックすることによって行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各々噴射方向が変更可能な複数のノズルが配置された噴水装置に関する。
【背景技術】
【0002】
従来、少ないノズルの数で複雑な噴水形状が得られ、設備費及び人工費が節減でき、優れた経済性が得られることを目的としたノズル仰角可変式自動制御噴水装置が提案されている。
【0003】
該提案に係る噴水装置では、ノズルが制御弁の下流側に可撓管継手を介して接続され、上部に立体十字状仰角可変機構の交叉部開口が緩く挿通される。即ち、一対の湾曲帯板は、略同一半径の上凸半円状の帯板であり、夫々中心線に沿って略半円に亘って延びる長孔を有し、互いに直交的に立体交叉している。第1の湾曲帯板は、サーボモータにより、夫々同一平面上にあるその両下端を結ぶ線分を直径(中心線)として、該中心線を中心に取付板の上方空間を半円弧状に正/逆方向に回転可能である。同様に、第2の湾曲帯板も、上記とは別のサーボモータにより、夫々同一平面上にあるその両下端を結ぶ線分を直径(中心線)(上記中心線同士は直交している)として、該中心線を中心に取付板の上方空間を半円弧上に正/逆方向に回転可能である。上記一対の湾曲帯板は、上述した立体十字状仰角可変機構を構成する。なお、上記両サーボモータは、回転時期等がコンピュータによって制御される(例えば特許文献1参照)。
【0004】
【特許文献1】特開平8-10668号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上述した提案に係る噴水装置では、ノズルが1個しか備えられていないから、該ノズルを、立体十字状仰角可変機構を構成している第1、第2の湾曲帯板に沿って夫々取付板の上方空間を半円弧状に(正/逆方向に)回転させたとしても、他のノズルと衝突して、ノズル同士が損傷をきたす虞は無い。また、該ノズルから噴射される水流が、他のノズルから噴射される水流と衝突することによって、水流が不規則に散乱し、美観を損なう虞も無い。
【0006】
しかし、上記提案に係る噴水装置が備える構成を、そのまま水流の噴射方向を可変自在とした構成のノズルを複数個配置する噴水装置に応用しようとすると、各ノズル同士を上述した態様で接近する方向に回転動作させた場合に、それによって各ノズル同士が衝突したり、或るノズルから噴射される水流と、それとは別のノズルから噴射される水流とが衝突する不具合が生じる虞がある。
【0007】
従って本発明の目的は、各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、各ノズルの衝突防止及び/又は各ノズルから噴射される水流同士の衝突を回避することで、各ノズルが損傷する不具合や、水流が散乱して美観を損ねる不具合を防止できるようにすることにある。
【課題を解決するための手段】
【0008】
本発明の第1の観点に従う噴水装置は、各々噴射方向が変更可能な複数のノズルが配置されたもので、上記各ノズル同士が接近する方向に動作した場合に、上記各ノズル同士が接近する方向に傾斜した角度と上記各ノズル同士の間隔とに基づいて、上記各ノズル同士が衝突するか否か予測する予測手段と、上記予測手段が、上記各ノズル同士が衝突すると予測した場合に、上記各ノズル同士の衝突を回避させるべく上記各ノズルの動作を修正する修正手段と、を備える。
【0009】
本発明の第1の観点に係る好適な実施形態では、上記予測手段が、上記各ノズルからの水流の噴射長さと、上記各ノズルの傾斜角度と、上記各ノズル同士の間隔とに基づいて、上記各ノズルから噴射される水流同士が衝突するか否かを予測するようにしている。
【0010】
上記とは別の実施形態では、上記修正手段が、上記予測手段が上記各ノズルから噴射される水流同士が衝突すると予測した場合に、上記各水流同士の衝突を回避させるべく前記各ノズルの動作を修正するようにした噴水装置。
【0011】
また、上記とは別の実施形態では、上記各ノズルが、同一平面上のX軸方向、及びそのX軸方向と直交するY軸方向に夫々回転可能に構成されており、上記予測手段が、まず上記各ノズルがX軸方向に回転した状態で、上記各ノズル同士及び/又は上記各ノズルから噴射される水流同士が衝突するか否か予測し、次に上記各ノズルがY軸方向に回転した状態で、上記各ノズル同士及び/又は上記各ノズルから噴射される水流同士が衝突するか否か予測するようにしている。
【0012】
更に、上記とは別の実施形態では、上記各ノズルが、同一平面上のX軸方向、及びそのX軸方向と直交するY軸方向に夫々回転可能に構成されており、且つ、上記各ノズルにおけるX軸方向が異なる場合に、上記予測手段が、上記各ノズル同士の間の実効距離を、上記各ノズル同士の間隔として、上記各ノズル同士が衝突するか否か及び/又は上記各ノズルから噴射される水流同士が衝突するか否かを予測するようにしている。
【0013】
本発明の第2の観点に従う噴水装置におけるノズルの衝突防止方法は、上記各ノズル同士が接近する方向に動作した場合に、上記各ノズル同士が接近する方向に傾斜した角度と上記各ノズル同士の間隔とに基づいて、上記各ノズル同士が衝突するか否か予測するステップと、上記予測するステップにおいて、上記各ノズル同士が衝突すると予測した場合に、上記各ノズル同士の衝突を回避させるべく上記各ノズルの動作を修正するステップと、を備える。
【発明の効果】
【0014】
本発明によれば、各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、各ノズルの衝突防止及び/又は各ノズルから噴射される水流同士の衝突を回避することで、各ノズルが損傷する不具合や、水流が散乱して美観を損ねる不具合を防止できるようにすることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態を、図面により詳細に説明する。
【0016】
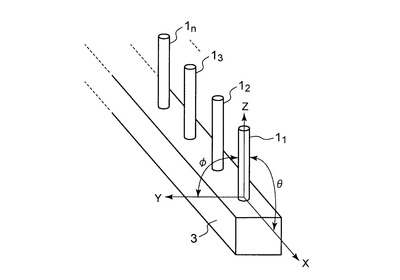
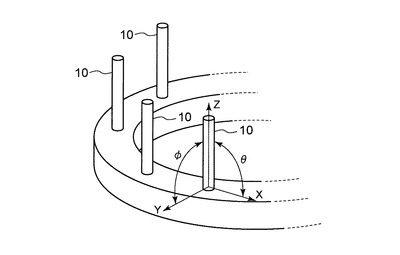
図1は、本発明の一実施形態に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図である。
【0017】
本実施形態に係る噴水装置では、図1に示すように、複数個のノズル11〜1nが、全体として帯状に長く延びた直方体形状を呈するノズル取付部3の上部平面に、所定の間隔を置いて配置されている。各ノズル(11〜1n)は、ノズル取付部3の上部平面から垂直方向(Z軸方向)に延びている。各ノズル11〜1nは、ノズル取付部3の上部平面において、ノズル取付部3の長手方向に沿って延びるX軸を中心として角度φだけ、また、該X軸に直交するY軸(即ち、ノズル取付部3の上部平面における横手方向)を中心として角度θだけ、夫々正/逆方向に回転可能に構成されている。
【0018】
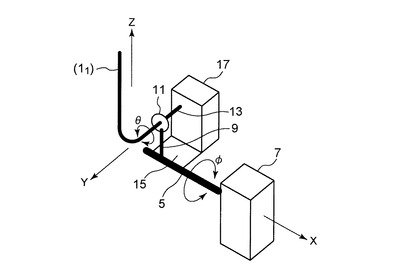
図2は、本発明の一実施形態に係る噴水装置における各ノズル(11〜1n)を回転駆動させるのに必要な構成の要部を示す説明図である。
【0019】
図2において、給水本管5は、給水源(図示しない)からの水を上述した(図1で示した)各ノズル11〜1nに供給するためのもので、図1で示したノズル取付部3のX軸方向(長手方向)に沿って配置されている。給水本管5は、例えば油圧アクチュエータ、或いは電動機等の第1の駆動装置7により、X軸を中心として角度φだけ正/逆方向に回転されるよう構成されている。
【0020】
給水本管5には、例えば符号9で示すような、ノズル取付部3の上部平面に対して垂直方向に(即ち、X軸に対して垂直なZ軸方向に沿って)延びる給水支管が、ノズル(11〜1n)の配置本数と同数、接続されている。給水支管(9)は、その一端側が給水本管5に、その他端側が例えば符号11で示すようなロータリー継ぎ手を介して、各ノズル(11〜1n)毎に設けられた、例えば符号13で示すような出力管に接続されている。
【0021】
各出力管(13)は、各ノズル(11〜1n)に個別に直結しており、何れもノズル取付部3の上部平面において、X軸に直交するY軸方向に延びている。各出力管(13)は、支持部材(15)を介して給水本管5に取付けられている、例えば油圧アクチュエータ、或いは電動機等の第2の駆動装置(17)により、Y軸を中心として角度θだけ正/逆方向に回転されるよう構成されている。各支持部材(15)は、給水本管5における各給水支管(9)が接続されている部位に、給水本管5と共に正/逆方向に回転自在に取付けられている。
【0022】
なお、各ノズル(11〜1n)は、既述のように、ノズル取付部3の上部平面から垂直方向(Z軸方向)に延びているが、各ノズル(11〜1n)と各出力管(13)とは、アールを付けた状態で接続されている。
【0023】
上記構成において、給水源(図示しない)から供給される水は、給水本管5、給水支管(9)、ロータリー継ぎ手(11)、及び出力管(13)を通じて対応するノズル(11〜1nのうちの何れか)から外部へ噴射される。
【0024】
給水本管5が、第1の駆動装置7により角度φだけ正/逆方向に回転動作すると、それに伴って各給水支管(9)、各ロータリー継ぎ手(11)、各出力管(13)、各支持部材(15)、第2の駆動装置(17)、及びノズル取付部3の上部平面から垂直方向(Z軸方向)に延びている、対応するノズル(11〜1nのうちの何れか)も、給水本管5(X軸)を中心として角度φだけ正/逆方向に回転動作する。
【0025】
一方、各出力管(13)が、各第2の駆動装置(17)により角度θだけ正/逆方向に回転動作することで、Z軸方向に沿って延びている、対応するノズル(11〜1nのうちの何れか)も、対応する出力管(13)(Y軸)を中心として角度θだけ正/逆方向に回転動作する。
【0026】
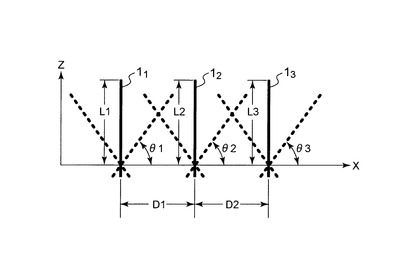
図3は、本発明の一実施形態に係る噴水装置において、各ノズル同士が互いに衝突すること無く回転動作を行うことが可能な各ノズルに対する制御態様を示す説明図である。
【0027】
図3では、上記噴水装置は、図示と説明の都合上、給水本管5に対して3本のノズル(11〜13)が、接続されているものとする。
【0028】
図3から明らかなように、図1、及び図2で夫々示したX軸方向、即ち、給水本管5が布設されている(長手)方向は、図3における横方向であり、図1、及び図2で夫々示したY軸方向、即ち、ノズル取付部3の横手方向は、図3の紙面を垂直に貫通する方向である。本実施形態では、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度φの大きさは、何れも同一である。換言すれば、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることはない。ノズル11の長さはL1、ノズル12の長さはL2、ノズル13の長さはL3で夫々示される。ノズル11とノズル12との間の距離はD1、ノズル12とノズル13との間の距離は、D2で夫々示される。
【0029】
更に、ノズル11におけるY軸方向、即ち、該ノズル11に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ1、ノズル12におけるY軸方向、即ち、該ノズル12に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ2、ノズル13におけるY軸方向、即ち、該ノズル13に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ3で夫々示される。
【0030】
ここで、仮に各ノズル(11、12、13)別に、X軸方向の回転角度(φ)が相違しているとすると、上記角度差が各ノズル(11、12、13)の管径(太さ)に対応する角度以上の大きさであれば、各ノズル(11、12、13)のY軸方向の回転角度(θ)が如何なる値を取ろうとも、各ノズル(11、12、13)同士が衝突することはない。よって、各ノズル(11、12、13)のX軸方向における回転角度(φ)の大きさが、一定角度範囲内、即ち、各ノズル(11、12、13)同士が衝突する可能性のある角度範囲内にあって、夫々の角度が接近した値を示している場合に、各ノズル(11、12、13)のY軸方向における回転角度(θ)を、各ノズル(11、12、13)同士が衝突しないように可変調整するのが、本発明の一実施形態の要諦である。
【0031】
本発明の一実施形態では、3本のノズル(11、12、13)のうちの真中に位置するノズル12に着目し、該ノズル12が左側のノズル11、右側のノズル13に衝突するかどうかを判断する。
【0032】
ノズル12と、ノズル11とが衝突するかどうかは、下記の(1)式、又は(2)式に基づいて判断される。
【0033】
α+β≧D1・・・・・・(1)
α+β<D1・・・・・・(2)
ここで、αとは、ノズル11の基部より、Y軸方向を中心として或る角度(θ)回転したノズル11の先端部から延びる垂線のX軸との交点までの距離を示し、βとは、ノズル12の基部より、Y軸方向を中心として或る角度(θ)回転したノズル12の先端部から延びる垂線のX軸との交点までの距離を示す。なお、D1は、既述の内容から明らかなように、ノズル11の基部とノズル12の基部との距離(ノズル取付ピッチ)を示す。
【0034】
αは、ノズル11の長さL1とノズル11のY軸方向における回転角度θ1の余弦であるcosθ1との積であるL1・cosθ1によって求まる。βは、ノズル12の長さL2とノズル12のY軸方向における回転角度(180−θ2)の余弦であるcos(180−θ2)との積であるL2・cos(180−θ2)によって求まる。よって、上記(1)式は下記の(3)式に、上記(2)式は下記の(4)式に、夫々書き換えることができる。
【0035】
L1・cosθ1+L2・cos(180−θ2)≧D1・・・・・・(3)
L1・cosθ1+L2・cos(180−θ2)<D1・・・・・・(4)
ここで、(1)式(即ち、(3)式)が成立する場合には、ノズル11とノズル12とは衝突し、(2)式(即ち、(4)式)が成立する場合には、ノズル11とノズル12とは衝突しない。
【0036】
上述した(1)〜(4)式は、何れも各ノズル(11、12、13)を、1本の線分と見做して立てられた式であるから、各ノズル(11、12、13)の中心位置のみが考慮されているに過ぎない。現実には、各ノズル(11、12、13)は、一定の大きさの管径を持っているので、管径を無視した上記(1)〜(4)式によっては、各ノズル(11、12、13)同士が実際に衝突するかどうかを正確に判断することは困難である。そこで、各ノズル(11、12、13)の管径等のハードウェアの寸法に安全率を考慮した値であるCを、上記(3)、(4)式の左辺を構成する各項に加えることにより、上記(3)式を下記の(5)式に、上記(4)式を下記の(6)式に、夫々変更する。
【0037】
(L1・cosθ1+C)+(L2・cos(180−θ2)+C)≧D1・・・・・・(5)
(L1・cosθ1+C)+(L2・cos(180−θ2)+C)<D1・・・・・・(6)
既述の内容から明らかなように、上記(5)式は、ノズル(11、12)同士が衝突するときの式であり、上記(6)式は、ノズル(11、12)同士が衝突しないときの式である。
【0038】
よって、ノズル(11、12)同士が衝突しないようにするには、(6)式を満足させることが必要である。上記(6)式から、θ1の値が或る角度範囲内にあるときの、ノズル(11、12)同士が衝突しないようにするためのθ2の角度範囲を算出すると共に、θ2の値が該算出した角度範囲を逸脱しないよう監視することにより、ノズル(11、12)同士の衝突の回避が可能になる。
【0039】
同様に、ノズル12と、ノズル13とが衝突するかどうかについては、上記(6)式と同様の下記の(7)式を満足させることが必要である。
【0040】
(L2・cosθ2+C)+(L3・cos(180−θ3)+C)<D2・・・・・・(7)
ここで、D2は、既述の内容から明らかなように、ノズル12の基部とノズル13の基部との距離(ノズル取付ピッチ)を示す。
【0041】
図3で示した例とは異なり、多数のノズル(11〜1n)がノズル取付部3に配置されている場合、ノズル取付部3の一方の端から他方の端に向かって、まず、一方の端に位置するノズル(例えば符号11で示す)と、該ノズル11に隣接するノズル(例えば符号12で示す)と、該ノズル12に隣接するノズル(例えば符号13で示す)との3本のノズルを1グループとする。そして、該グループの真中に位置するノズル12を基準に、上記(6)式が成立するよう、夫々のノズル(11、12)のY軸方向における回転角度(θ)を可変調整する。同様に、上記真中に位置するノズル(12)と、ノズル(13)との間に、上記(7)式が成立するよう、夫々のノズル(12、13)のY軸方向における回転角度(θ)を可変調整する。
【0042】
次に、上記ノズル(13)に隣接するノズル(例えば符号14で示す)を中心として、該ノズル(14)と、上記ノズル(13)とは反対側のノズル(例えば符号15で示す)の3本のノズルを別の1グループとする。そして、該グループの真中に位置するノズル(14)を基準に、上記(6)式と同様の式が成立するよう、夫々のノズル(13、14)のY軸方向における回転角度(θ)を可変調整する。同様に、上記真中に位置するノズル(14)と、ノズル(15)との間に、上記(7)式と同様の式が成立するよう、夫々のノズル(14、15)のY軸方向における回転角度(θ)を可変調整する。
【0043】
上記態様で、3本のノズルを1グループとして、各グループを構成するノズル同士が衝突しないように、各ノズルのY軸方向における回転角度(θ)の大きさを可変調整しつつ、ノズル取付部3の他方の端に位置するノズルに至る。
【0044】
例えば、ノズル取付部3に6本のノズルが配置されているような場合には、以下のようなグループ分けが行われ、上記と同様の態様で、各ノズルのY軸方向における回転角度(θ)の大きさが可変調整される。
【0045】
まず、ノズル取付部3の一方の端に位置するノズル(例えば符号11で示す)と、該ノズル11に隣接するノズル(例えば符号12で示す)と、該ノズル12に隣接するノズル(例えば符号13で示す)との3本のノズルを1グループとして、該グループの真中に位置するノズル12を基準に、上述した処理を実行する。次に、上記ノズル12、ノズル13と、該ノズル13に隣接するノズル(例えば符号14で示す)とを別の1グループとして、該グループの真中に位置するノズル13を基準に、上述した処理を実行する。次に、上記ノズル13、ノズル14と、該ノズル14に隣接するノズル(例えば符号15で示す)との3本のノズルを1グループとして、該グループの真中に位置するノズル14を基準に、上述した処理を実行する。このようにして、ノズル取付部3の他方の端に位置するノズル(例えば符号16で示す)に到達するまで、上記処理を実行する。
【0046】
上述した各ノズルに係わるグループ分けについては、上記態様以外にも種々のものが想定され得るので、グループ分けの仕方は、必ずしも上記内容のみに限定されない。
【0047】
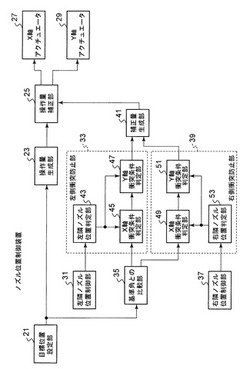
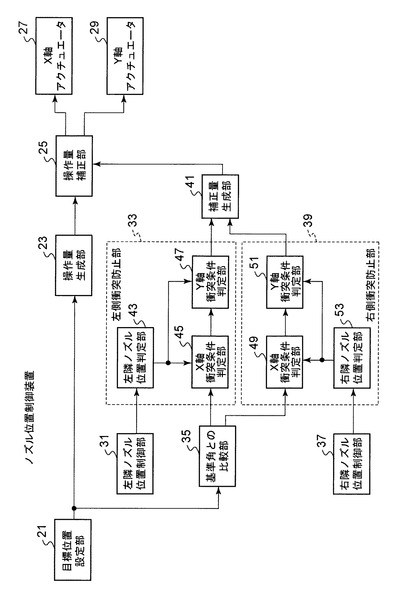
図4は、本発明の一実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図である。
【0048】
このノズル位置制御装置は、図4に示すように、目標位置設定部21と、操作量生成部23と、操作量補正部25と、X軸アクチュエータ27と、Y軸アクチュエータ29と、左隣ノズル位置制御部31と、左側衝突防止部33と、基準角との比較部35と、右隣ノズル位置制御部37と、右側衝突防止部39と、補正量生成部41と、を含む。左側衝突防止部33は、左隣ノズル位置判定部43と、X軸衝突条件判定部45と、Y軸衝突条件判定部47と、を含み、右側衝突防止部39は、X軸衝突条件判定部49と、Y軸衝突条件判定部51と、右隣ノズル位置判定部53と、を含む。
【0049】
目標位置設定部21は、基準となるノズル(例えばノズル11〜13の3本を1グル−プとした場合、その真中に位置するノズル12)におけるX軸方向の回転角度(φ)、及びY軸方向の回転角度(θ)を、夫々設定する。目標位置設定部21により設定された上記X軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値は、操作量生成部23、及び基準角との比較部35に夫々出力される。
【0050】
操作量生成部23は、目標位置設定部21から与えられる上記基準となるノズル(12)のX軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値に基づき、該ノズル(12)の(X軸アクチュエータ、Y軸アクチュエータ)操作量を求めると共に、該求めた操作量を操作量補正部25に出力する。
【0051】
基準角との比較部35は、目標位置設定部21から出力されるノズル(12)のX軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値と、基準角の値、即ち、90°(垂直)とを比較する。そして、該比較結果に基づき、対象となるノズル、即ち、ノズル12がその左隣のノズルであるノズル11側に傾斜しているのか、それとも、その右隣のノズルであるノズル13側に傾斜しているのかを判断する。基準角との比較部35は、上記判断した結果を、(左側衝突防止部33の)X軸衝突条件判定部45、又は(右側衝突防止部39の)X軸衝突条件判定部49に択一的に通知する。即ち、基準となるノズル(12)が、左側に傾いていれば(左側衝突防止部33の)X軸衝突条件判定部45に、右側に傾いていれば(右側衝突防止部39の)X軸衝突条件判定部49に、上記判断した結果が通知される。
【0052】
左側衝突防止部33において、左隣ノズル位置判定部43は、上記左側のノズルであるノズル11の位置制御を行う左隣ノズル位置制御部31から、X軸方向を中心とした回転角度(φ)データ、及びY軸方向を中心とした回転角度(θ)データを入力する。上記各回転角度データ(φ、θ)は、例えばポテンショメータのような回転角度センサからの出力信号を入力することによっても、取得することができる。左隣ノズル位置判定部43は、上記各回転角度データ(φ、θ)に基づいて、上記基準となるノズル(12)の左隣のノズル(11)の位置を判定する。そして、該判定した結果を、X軸衝突条件判定部45、及びY軸衝突条件判定部47に夫々通知する。
【0053】
X軸衝突条件判定部45は、基準角との比較部35から通知される上述した(回転角度データ(φ)に係わる)判断の結果と、左隣ノズル位置判定部43から通知される上述した判定の結果とに基づき、上記基準となるノズル(12)と、その左隣のノズル(11)とが衝突する条件を充足しているかどうか判定する。そして、その判定の結果を(例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で)、(左側衝突防止部33の)Y軸衝突条件判定部47に通知する。
【0054】
但し、本実施形態では、既述のように、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度(φ)の大きさは、何れも同一であり、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることは無いから、上記基準となるノズル(12)の左隣のノズルであるノズル(11)のX軸方向における衝突条件を判定する必要は無い。従って、基準角との比較部35からの上述した(回転角度データ(θ)に係わる)判断の結果は、X軸衝突条件判定部45を介して直接Y軸衝突条件判定部47に通知されることになる。
【0055】
Y軸衝突条件判定部47は、X軸衝突条件判定部45を介して基準角との比較部35から通知される上述した(回転角度データ(θ)に係わる)判断の結果と、左隣ノズル位置判定部43から通知される上述した判定の結果とに基づき、上記基準となるノズル(12)と、その左隣のノズル(11)とが衝突する条件を充足しているかどうか判定する。そして、その判定の結果を(例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で)、補正量生成部41に通知する。Y軸衝突条件判定部47による上記判定は、例えば既述の(6)式が満足されるかどうかをチェックすることによって行われる。
【0056】
既述の(6)式が満足されていれば、上記基準となるノズル(12)が、その左隣のノズル(11)と衝突しないことを示しているので、Y軸衝突条件判定部47は、補正量が『0』である旨を、補正量生成部41に通知する。逆に、(6)式が満足されていなければ、つまり、上記基準となるノズル(12)とその左隣のノズル(11)とが衝突することを示していれば、Y軸衝突条件判定部47は、ノズル(11、12)同士が衝突する旨を、補正量生成部41に通知する。
【0057】
補正量生成部41は、Y軸衝突条件判定部47から、補正量が『0』である旨の通知を受けた場合には、補正量が『0』である旨を、ノズル(11、12)同士が衝突する旨の通知を受けた場合には、例えば既述の(6)式に基づいて、ノズル(11、12)同士の衝突を回避するための補正量(回転角度θの大きさ)を求め、該求めた補正量のデータを、操作量補正部25へ出力する。
【0058】
操作量補正部25は、補正量生成部41から上記補正量のデータが出力されると、操作量生成部23からのノズル(12)の操作量を、上記補正量により補正する(Y軸方向の回転角度(θ)を小さく設定し直す)と共に、該補正後の操作量で、ノズル(12)のY軸アクチュエータ29を駆動する。なお、Y軸方向の回転角度を0に設定することも可能であるが、その場合には、Y軸アクチュエータ29の駆動を停止させる(即ち、Y軸方向の回転を停止させる)ことになる。
【0059】
本実施形態では、既述のように、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度(φ)の大きさは、何れも同一であり、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることは無いから、操作量補正部25は、X軸アクチュエータ27を駆動しない。
【0060】
右隣ノズル位置制御部37の構成、及び機能は、既に詳述した左隣ノズル位置制御部31の構成、及び機能と実質的に同一である。
【0061】
また、右側衝突防止部39の構成、及び機能についても、上述した左側衝突防止部33の構成、及び機能と実質的に同一である。即ち、右側衝突防止部39におけるX軸衝突条件判定部49は、左側衝突防止部33のX軸衝突条件判定部45に、また、右側衝突防止部39におけるY軸衝突条件判定部51は、左側衝突防止部33のY軸衝突条件判定部47に、更に、右側衝突防止部39における右隣ノズル位置判定部53は、左側衝突防止部33の左隣ノズル位置判定部43に、夫々対応する。
【0062】
既述の内容から明らかなように、上記基準となるノズル(12)が、その左隣のノズル(11)側に傾いているのか、それともその右隣のノズル(13)側に傾いているのかを、夫々左側衝突防止部33、右側衝突防止部39によってチェックする。よって、基準角との比較部35からの上記通知、及び左隣ノズル位置制御部31からの回転角度データに基づいて左側衝突防止部33が駆動しているときには、右側衝突防止部39は駆動停止状態に置かれる。これとは逆に、基準角との比較部35からの上記通知、及び右隣ノズル位置制御部37からの回転角度データに基づいて右側衝突防止部39が駆動しているときには、左側衝突防止部33は駆動停止状態に置かれる。換言すれば、左側衝突防止部33と右側衝突防止部39とは、択一的に駆動する。
【0063】
図5は、本発明の一実施形態の変形例に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図である。
【0064】
図5に示した例では、ノズル取付部155が円弧状に形成されており、複数個のノズル(11〜1n)がノズル取付部155の上部平面に、夫々所定の間隔を置いて配置されている。各ノズル(11〜1n)は、円弧状を呈するノズル取付部155の接線方向にX軸が、法線方向にY軸が、夫々設定されていて、X軸を中心として角度φだけ、また、Y軸を中心として角度θだけ、夫々正/逆方向に回転可能に構成されている。
【0065】
図5に示した例のように、各ノズル(11〜1n)のX軸の方向が同一でない場合には、図4において、左側衝突防止部33のX軸衝突条件判定部45は、基準角との比較部35から通知される判断結果と、左側ノズル位置判定部43から通知される判定結果とに基づき、既述のY軸衝突条件判定部47において行われたと同様な処理動作により、基準となるノズル(12)がその左隣のノズル(11)と衝突するかどうか判定する。X軸衝突条件判定部45が衝突しないと判定した場合には、Y軸衝突条件判定部45において上記ノズル(11、12)が衝突するかどうかの判定は行わず、補正量生成部41も、ノズル(11、12)同士の衝突を回避するための補正量(回転角度(φ、θ)の大きさ)を求める処理動作を行わない。右側衝突防止部39のX軸衝突条件判定部49、及びY軸衝突条件判定部51においても、上記と同様である。
【0066】
ここで、各ノズル(11〜1n)において、隣り合うノズルのX軸方向の回転角度(φ)の差分値が、互いに衝突することがない大きさ以上であれば、該隣り合うノズルのY軸方向の回転角度(θ)がどのような値であっても、該隣り合うノズル同士が衝突することは無い。よって、X軸衝突条件判定部(45、49)において、衝突しないと判定された隣り合うノズル同士については、Y軸衝突条件判定部(47、51)では判定を行わず、補正量生成部41においても、(補正量が『0』であるので)補正量を求めるための処理動作を行わない。
【0067】
なお、X軸衝突条件判定部(45/49)において、基準となるノズル(12)と隣り合うノズル(11/13)とが衝突すると判定された場合には、Y軸衝突条件判定部(47、51)において上記基準となるノズル(12)と隣り合うノズル(11/13)とが衝突するかどうか判定される。そして、補正量生成部41において、該判定結果に基づき、上記ノズル同士(12、11/13)の衝突を回避するためのX軸方向の回転角度(φ)、Y軸方向の回転角度(θ)の補正量が求められ、該求められた補正量が、補正量生成部41から操作量補正部25に出力される。操作量補正部25では、上記補正量によって補正した操作量に基づいて、X軸アクチュエータ27、及び/又はY軸アクチュエータ29の駆動を制御する。
【0068】
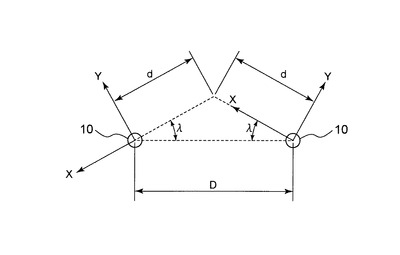
図6は、図5に記載の噴水装置において、隣り合うノズル(11、12/12、13)同士の衝突を回避するための演算処理の原理を示した図である。
【0069】
既述のように、各ノズル(11〜1n)は、円弧状を呈するノズル取付部155の接線方向に夫々X軸が、法線方向に夫々Y軸が設定されているので、各ノズル(11〜1n)のX軸方向は、夫々異なっている。ここで、隣り合うノズル(11、12/12、13)同士の間の距離をDとし、各ノズル(11〜1n)の長さをdとし、隣り合うノズル(11、12/12、13)同士の取付位置を結ぶ直線とノズル(11、12/12、13)とのなす角をλとすれば、下記の(8)式が成立する場合に、隣り合うノズル(11、12/12、13)同士が衝突することになる。
【0070】
2d=D/cosλ・・・・・・・(8)
よって、図5に記載の態様で、円弧状のノズル取付部155に配置されている複数個のノズル(11〜1n)同士が衝突するか否かの判定を行う場合には、図4で示したノズル位置制御装置のY軸衝突条件判定部(47/51)に上記(8)式を代入して所定の処理動作を実行することになる。
【0071】
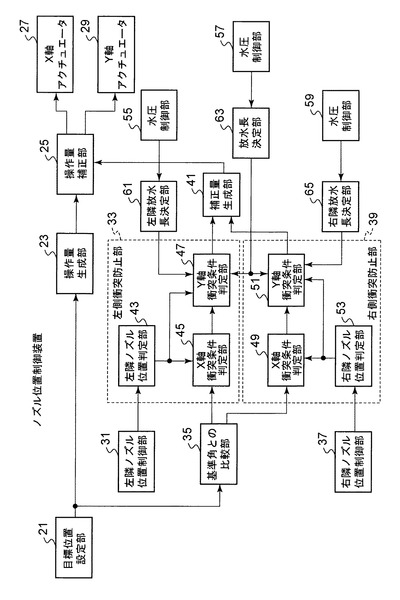
図7は、本発明の他の実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図である。
【0072】
本実施形態に係るノズル位置制御装置では、隣り合うノズル同士(11、12/12、13)の衝突の防止に加えて、隣り合うノズル同士(11、12/12、13)から噴射される噴水同士の衝突をも防止することが可能なように構成されている。
【0073】
本実施形態に係るノズル位置制御装置では、図5で示した各部に加えて、更に、水圧制御部55、57、59と、左隣放水長決定部61と、放水長決定部63と、右隣放水長決定部65と、を備える点で、図5で示したノズル位置制御装置と相違する。なお、図7において、図5で示した物と同一物には同一符号を付して、それらの詳細な説明を省略する。
【0074】
水圧制御部57は、基準となるノズル(12)の左隣に位置するノズル(11)に対し、また、水圧制御部59は、上記基準となるノズル(12)に対し、更に、水圧制御部61は、上記基準となるノズル(12)の右隣に位置するノズル(13)に対し、夫々給水源(図示しない)から供給される水流の圧力を所定の値に制御する。
【0075】
左隣放水長決定部61は、水圧制御部55によって制御される水圧の大きさに基づき、上記左隣のノズル(11)から噴射される水流の放水長を求め、該求めた放水長データを、(左側衝突防止部33の)Y軸衝突条件判定部47へ通知する。また、放水長決定部63も、水圧制御部57によって制御される水圧の大きさに基づき、上記基準となるノズル(12)から噴射される水流の放水長を求め、該求めた放水長データを、(左側衝突防止部33の)Y軸衝突条件判定部47、及び(右側衝突防止部39の)Y軸衝突条件判定部51へ通知する。更に、右隣放水長決定部65も、水圧制御部59によって制御される水圧の大きさに基づき、上記右隣のノズル(13)から噴射される水流の放水長を求め、該求めた放水長データを、(右側衝突防止部39の)Y軸衝突条件判定部51へ通知する。
【0076】
(左側衝突防止部33の)Y軸衝突条件判定部47は、左隣放水長決定部61からの放水長データと、放水長決定部63からの放水長データとに基づき、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突するかどうか判定する。該判定の結果、双方の放水が衝突すると判定すれば、その旨を補正量生成部41へ通知する。この場合、上記基準となるノズル(12)からの放水と、上記右隣のノズル(13)からの放水とが衝突する虞は無いので、以下に説明する(右側衝突防止部39の)Y軸衝突条件判定部51での衝突するかどうかの判定は行われない。
【0077】
一方、(右側衝突防止部39の)Y軸衝突条件判定部51は、右隣放水長決定部65からの放水長データと、放水長決定部63からの放水長データとに基づき、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突するかどうか判定する。該判定の結果、双方の放水が衝突すると判定すれば、その旨を補正量生成部41へ通知する。この場合も上記と同様に、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突する虞は無いので、(右側衝突防止部39の)Y軸衝突条件判定部51で衝突するかどうかの判定が行われた場合には、(左側衝突防止部33の)Y軸衝突条件判定部47での上述した衝突するかどうかの判定は行われない。
【0078】
補正量生成部41では、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水との衝突/上記基準となるノズル(12)からの放水と、上記右隣のノズル(13)からの放水との衝突、を回避することが可能な補正量(回転角度θの大きさ)を求め、該求めた補正量のデータを、操作量補正部25へ出力する。
【0079】
上述した内容から明らかなように、本実施形態では、各ノズル(11、12、13)のノズル長が、各ノズル(11、12、13)から噴射される水流の放水長に置き換えられた点で、上述した一実施形態と相違する。
【0080】
図7で示した構成のノズル位置制御装置を用いることによって、隣り合うノズル(11、12/12、13)から噴射される水流同士が衝突するのを回避することができる。
【0081】
以上、本発明の好適な実施形態を説明したが、これらは本発明の説明のための例示であって、本発明の範囲をこれらの実施形態にのみ限定する趣旨ではない。本発明は、他の種々の形態でも実施することが可能である。
【図面の簡単な説明】
【0082】
【図1】本発明の一実施形態に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図。
【図2】本発明の一実施形態に係る噴水装置における各ノズル(11〜1n)を回転駆動させるのに必要な構成の要部を示す説明図。
【図3】本発明の一実施形態に係る噴水装置において、各ノズル同士が互いに衝突すること無く回転動作を行うことが可能な各ノズルに対する制御態様を示す説明図。
【図4】本発明の一実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図。
【図5】本発明の一実施形態の変形例に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図。
【図6】図5に記載の噴水装置において、隣り合うノズル同士の衝突を回避するための演算処理の原理を示した図。
【図7】本発明の他の実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図。
【符号の説明】
【0083】
11〜1n ノズル
3 ノズル取付部
5 給水本管
7 第1の駆動装置
9 給水支管
11 ロータリー継ぎ手
13 出力管
15 支持部材
17 第2の駆動装置
21 目標位置設定部
23 操作量生成部
25 操作量補正部
27 X軸アクチュエータ
29 Y軸アクチュエータ
31 左隣ノズル位置制御部
33 左側衝突防止部
35 基準角との比較部
37 右隣ノズル位置制御部
39 右隣衝突防止部
41 補正量生成部
43 左隣ノズル位置決定部
45、49 X軸衝突条件判定部
47、51 Y軸衝突条件判定部
53 右隣ノズル位置決定部
【技術分野】
【0001】
本発明は、各々噴射方向が変更可能な複数のノズルが配置された噴水装置に関する。
【背景技術】
【0002】
従来、少ないノズルの数で複雑な噴水形状が得られ、設備費及び人工費が節減でき、優れた経済性が得られることを目的としたノズル仰角可変式自動制御噴水装置が提案されている。
【0003】
該提案に係る噴水装置では、ノズルが制御弁の下流側に可撓管継手を介して接続され、上部に立体十字状仰角可変機構の交叉部開口が緩く挿通される。即ち、一対の湾曲帯板は、略同一半径の上凸半円状の帯板であり、夫々中心線に沿って略半円に亘って延びる長孔を有し、互いに直交的に立体交叉している。第1の湾曲帯板は、サーボモータにより、夫々同一平面上にあるその両下端を結ぶ線分を直径(中心線)として、該中心線を中心に取付板の上方空間を半円弧状に正/逆方向に回転可能である。同様に、第2の湾曲帯板も、上記とは別のサーボモータにより、夫々同一平面上にあるその両下端を結ぶ線分を直径(中心線)(上記中心線同士は直交している)として、該中心線を中心に取付板の上方空間を半円弧上に正/逆方向に回転可能である。上記一対の湾曲帯板は、上述した立体十字状仰角可変機構を構成する。なお、上記両サーボモータは、回転時期等がコンピュータによって制御される(例えば特許文献1参照)。
【0004】
【特許文献1】特開平8-10668号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上述した提案に係る噴水装置では、ノズルが1個しか備えられていないから、該ノズルを、立体十字状仰角可変機構を構成している第1、第2の湾曲帯板に沿って夫々取付板の上方空間を半円弧状に(正/逆方向に)回転させたとしても、他のノズルと衝突して、ノズル同士が損傷をきたす虞は無い。また、該ノズルから噴射される水流が、他のノズルから噴射される水流と衝突することによって、水流が不規則に散乱し、美観を損なう虞も無い。
【0006】
しかし、上記提案に係る噴水装置が備える構成を、そのまま水流の噴射方向を可変自在とした構成のノズルを複数個配置する噴水装置に応用しようとすると、各ノズル同士を上述した態様で接近する方向に回転動作させた場合に、それによって各ノズル同士が衝突したり、或るノズルから噴射される水流と、それとは別のノズルから噴射される水流とが衝突する不具合が生じる虞がある。
【0007】
従って本発明の目的は、各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、各ノズルの衝突防止及び/又は各ノズルから噴射される水流同士の衝突を回避することで、各ノズルが損傷する不具合や、水流が散乱して美観を損ねる不具合を防止できるようにすることにある。
【課題を解決するための手段】
【0008】
本発明の第1の観点に従う噴水装置は、各々噴射方向が変更可能な複数のノズルが配置されたもので、上記各ノズル同士が接近する方向に動作した場合に、上記各ノズル同士が接近する方向に傾斜した角度と上記各ノズル同士の間隔とに基づいて、上記各ノズル同士が衝突するか否か予測する予測手段と、上記予測手段が、上記各ノズル同士が衝突すると予測した場合に、上記各ノズル同士の衝突を回避させるべく上記各ノズルの動作を修正する修正手段と、を備える。
【0009】
本発明の第1の観点に係る好適な実施形態では、上記予測手段が、上記各ノズルからの水流の噴射長さと、上記各ノズルの傾斜角度と、上記各ノズル同士の間隔とに基づいて、上記各ノズルから噴射される水流同士が衝突するか否かを予測するようにしている。
【0010】
上記とは別の実施形態では、上記修正手段が、上記予測手段が上記各ノズルから噴射される水流同士が衝突すると予測した場合に、上記各水流同士の衝突を回避させるべく前記各ノズルの動作を修正するようにした噴水装置。
【0011】
また、上記とは別の実施形態では、上記各ノズルが、同一平面上のX軸方向、及びそのX軸方向と直交するY軸方向に夫々回転可能に構成されており、上記予測手段が、まず上記各ノズルがX軸方向に回転した状態で、上記各ノズル同士及び/又は上記各ノズルから噴射される水流同士が衝突するか否か予測し、次に上記各ノズルがY軸方向に回転した状態で、上記各ノズル同士及び/又は上記各ノズルから噴射される水流同士が衝突するか否か予測するようにしている。
【0012】
更に、上記とは別の実施形態では、上記各ノズルが、同一平面上のX軸方向、及びそのX軸方向と直交するY軸方向に夫々回転可能に構成されており、且つ、上記各ノズルにおけるX軸方向が異なる場合に、上記予測手段が、上記各ノズル同士の間の実効距離を、上記各ノズル同士の間隔として、上記各ノズル同士が衝突するか否か及び/又は上記各ノズルから噴射される水流同士が衝突するか否かを予測するようにしている。
【0013】
本発明の第2の観点に従う噴水装置におけるノズルの衝突防止方法は、上記各ノズル同士が接近する方向に動作した場合に、上記各ノズル同士が接近する方向に傾斜した角度と上記各ノズル同士の間隔とに基づいて、上記各ノズル同士が衝突するか否か予測するステップと、上記予測するステップにおいて、上記各ノズル同士が衝突すると予測した場合に、上記各ノズル同士の衝突を回避させるべく上記各ノズルの動作を修正するステップと、を備える。
【発明の効果】
【0014】
本発明によれば、各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、各ノズルの衝突防止及び/又は各ノズルから噴射される水流同士の衝突を回避することで、各ノズルが損傷する不具合や、水流が散乱して美観を損ねる不具合を防止できるようにすることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態を、図面により詳細に説明する。
【0016】
図1は、本発明の一実施形態に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図である。
【0017】
本実施形態に係る噴水装置では、図1に示すように、複数個のノズル11〜1nが、全体として帯状に長く延びた直方体形状を呈するノズル取付部3の上部平面に、所定の間隔を置いて配置されている。各ノズル(11〜1n)は、ノズル取付部3の上部平面から垂直方向(Z軸方向)に延びている。各ノズル11〜1nは、ノズル取付部3の上部平面において、ノズル取付部3の長手方向に沿って延びるX軸を中心として角度φだけ、また、該X軸に直交するY軸(即ち、ノズル取付部3の上部平面における横手方向)を中心として角度θだけ、夫々正/逆方向に回転可能に構成されている。
【0018】
図2は、本発明の一実施形態に係る噴水装置における各ノズル(11〜1n)を回転駆動させるのに必要な構成の要部を示す説明図である。
【0019】
図2において、給水本管5は、給水源(図示しない)からの水を上述した(図1で示した)各ノズル11〜1nに供給するためのもので、図1で示したノズル取付部3のX軸方向(長手方向)に沿って配置されている。給水本管5は、例えば油圧アクチュエータ、或いは電動機等の第1の駆動装置7により、X軸を中心として角度φだけ正/逆方向に回転されるよう構成されている。
【0020】
給水本管5には、例えば符号9で示すような、ノズル取付部3の上部平面に対して垂直方向に(即ち、X軸に対して垂直なZ軸方向に沿って)延びる給水支管が、ノズル(11〜1n)の配置本数と同数、接続されている。給水支管(9)は、その一端側が給水本管5に、その他端側が例えば符号11で示すようなロータリー継ぎ手を介して、各ノズル(11〜1n)毎に設けられた、例えば符号13で示すような出力管に接続されている。
【0021】
各出力管(13)は、各ノズル(11〜1n)に個別に直結しており、何れもノズル取付部3の上部平面において、X軸に直交するY軸方向に延びている。各出力管(13)は、支持部材(15)を介して給水本管5に取付けられている、例えば油圧アクチュエータ、或いは電動機等の第2の駆動装置(17)により、Y軸を中心として角度θだけ正/逆方向に回転されるよう構成されている。各支持部材(15)は、給水本管5における各給水支管(9)が接続されている部位に、給水本管5と共に正/逆方向に回転自在に取付けられている。
【0022】
なお、各ノズル(11〜1n)は、既述のように、ノズル取付部3の上部平面から垂直方向(Z軸方向)に延びているが、各ノズル(11〜1n)と各出力管(13)とは、アールを付けた状態で接続されている。
【0023】
上記構成において、給水源(図示しない)から供給される水は、給水本管5、給水支管(9)、ロータリー継ぎ手(11)、及び出力管(13)を通じて対応するノズル(11〜1nのうちの何れか)から外部へ噴射される。
【0024】
給水本管5が、第1の駆動装置7により角度φだけ正/逆方向に回転動作すると、それに伴って各給水支管(9)、各ロータリー継ぎ手(11)、各出力管(13)、各支持部材(15)、第2の駆動装置(17)、及びノズル取付部3の上部平面から垂直方向(Z軸方向)に延びている、対応するノズル(11〜1nのうちの何れか)も、給水本管5(X軸)を中心として角度φだけ正/逆方向に回転動作する。
【0025】
一方、各出力管(13)が、各第2の駆動装置(17)により角度θだけ正/逆方向に回転動作することで、Z軸方向に沿って延びている、対応するノズル(11〜1nのうちの何れか)も、対応する出力管(13)(Y軸)を中心として角度θだけ正/逆方向に回転動作する。
【0026】
図3は、本発明の一実施形態に係る噴水装置において、各ノズル同士が互いに衝突すること無く回転動作を行うことが可能な各ノズルに対する制御態様を示す説明図である。
【0027】
図3では、上記噴水装置は、図示と説明の都合上、給水本管5に対して3本のノズル(11〜13)が、接続されているものとする。
【0028】
図3から明らかなように、図1、及び図2で夫々示したX軸方向、即ち、給水本管5が布設されている(長手)方向は、図3における横方向であり、図1、及び図2で夫々示したY軸方向、即ち、ノズル取付部3の横手方向は、図3の紙面を垂直に貫通する方向である。本実施形態では、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度φの大きさは、何れも同一である。換言すれば、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることはない。ノズル11の長さはL1、ノズル12の長さはL2、ノズル13の長さはL3で夫々示される。ノズル11とノズル12との間の距離はD1、ノズル12とノズル13との間の距離は、D2で夫々示される。
【0029】
更に、ノズル11におけるY軸方向、即ち、該ノズル11に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ1、ノズル12におけるY軸方向、即ち、該ノズル12に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ2、ノズル13におけるY軸方向、即ち、該ノズル13に接続している出力管(13)の延びている方向を中心とする回転角度の大きさはθ3で夫々示される。
【0030】
ここで、仮に各ノズル(11、12、13)別に、X軸方向の回転角度(φ)が相違しているとすると、上記角度差が各ノズル(11、12、13)の管径(太さ)に対応する角度以上の大きさであれば、各ノズル(11、12、13)のY軸方向の回転角度(θ)が如何なる値を取ろうとも、各ノズル(11、12、13)同士が衝突することはない。よって、各ノズル(11、12、13)のX軸方向における回転角度(φ)の大きさが、一定角度範囲内、即ち、各ノズル(11、12、13)同士が衝突する可能性のある角度範囲内にあって、夫々の角度が接近した値を示している場合に、各ノズル(11、12、13)のY軸方向における回転角度(θ)を、各ノズル(11、12、13)同士が衝突しないように可変調整するのが、本発明の一実施形態の要諦である。
【0031】
本発明の一実施形態では、3本のノズル(11、12、13)のうちの真中に位置するノズル12に着目し、該ノズル12が左側のノズル11、右側のノズル13に衝突するかどうかを判断する。
【0032】
ノズル12と、ノズル11とが衝突するかどうかは、下記の(1)式、又は(2)式に基づいて判断される。
【0033】
α+β≧D1・・・・・・(1)
α+β<D1・・・・・・(2)
ここで、αとは、ノズル11の基部より、Y軸方向を中心として或る角度(θ)回転したノズル11の先端部から延びる垂線のX軸との交点までの距離を示し、βとは、ノズル12の基部より、Y軸方向を中心として或る角度(θ)回転したノズル12の先端部から延びる垂線のX軸との交点までの距離を示す。なお、D1は、既述の内容から明らかなように、ノズル11の基部とノズル12の基部との距離(ノズル取付ピッチ)を示す。
【0034】
αは、ノズル11の長さL1とノズル11のY軸方向における回転角度θ1の余弦であるcosθ1との積であるL1・cosθ1によって求まる。βは、ノズル12の長さL2とノズル12のY軸方向における回転角度(180−θ2)の余弦であるcos(180−θ2)との積であるL2・cos(180−θ2)によって求まる。よって、上記(1)式は下記の(3)式に、上記(2)式は下記の(4)式に、夫々書き換えることができる。
【0035】
L1・cosθ1+L2・cos(180−θ2)≧D1・・・・・・(3)
L1・cosθ1+L2・cos(180−θ2)<D1・・・・・・(4)
ここで、(1)式(即ち、(3)式)が成立する場合には、ノズル11とノズル12とは衝突し、(2)式(即ち、(4)式)が成立する場合には、ノズル11とノズル12とは衝突しない。
【0036】
上述した(1)〜(4)式は、何れも各ノズル(11、12、13)を、1本の線分と見做して立てられた式であるから、各ノズル(11、12、13)の中心位置のみが考慮されているに過ぎない。現実には、各ノズル(11、12、13)は、一定の大きさの管径を持っているので、管径を無視した上記(1)〜(4)式によっては、各ノズル(11、12、13)同士が実際に衝突するかどうかを正確に判断することは困難である。そこで、各ノズル(11、12、13)の管径等のハードウェアの寸法に安全率を考慮した値であるCを、上記(3)、(4)式の左辺を構成する各項に加えることにより、上記(3)式を下記の(5)式に、上記(4)式を下記の(6)式に、夫々変更する。
【0037】
(L1・cosθ1+C)+(L2・cos(180−θ2)+C)≧D1・・・・・・(5)
(L1・cosθ1+C)+(L2・cos(180−θ2)+C)<D1・・・・・・(6)
既述の内容から明らかなように、上記(5)式は、ノズル(11、12)同士が衝突するときの式であり、上記(6)式は、ノズル(11、12)同士が衝突しないときの式である。
【0038】
よって、ノズル(11、12)同士が衝突しないようにするには、(6)式を満足させることが必要である。上記(6)式から、θ1の値が或る角度範囲内にあるときの、ノズル(11、12)同士が衝突しないようにするためのθ2の角度範囲を算出すると共に、θ2の値が該算出した角度範囲を逸脱しないよう監視することにより、ノズル(11、12)同士の衝突の回避が可能になる。
【0039】
同様に、ノズル12と、ノズル13とが衝突するかどうかについては、上記(6)式と同様の下記の(7)式を満足させることが必要である。
【0040】
(L2・cosθ2+C)+(L3・cos(180−θ3)+C)<D2・・・・・・(7)
ここで、D2は、既述の内容から明らかなように、ノズル12の基部とノズル13の基部との距離(ノズル取付ピッチ)を示す。
【0041】
図3で示した例とは異なり、多数のノズル(11〜1n)がノズル取付部3に配置されている場合、ノズル取付部3の一方の端から他方の端に向かって、まず、一方の端に位置するノズル(例えば符号11で示す)と、該ノズル11に隣接するノズル(例えば符号12で示す)と、該ノズル12に隣接するノズル(例えば符号13で示す)との3本のノズルを1グループとする。そして、該グループの真中に位置するノズル12を基準に、上記(6)式が成立するよう、夫々のノズル(11、12)のY軸方向における回転角度(θ)を可変調整する。同様に、上記真中に位置するノズル(12)と、ノズル(13)との間に、上記(7)式が成立するよう、夫々のノズル(12、13)のY軸方向における回転角度(θ)を可変調整する。
【0042】
次に、上記ノズル(13)に隣接するノズル(例えば符号14で示す)を中心として、該ノズル(14)と、上記ノズル(13)とは反対側のノズル(例えば符号15で示す)の3本のノズルを別の1グループとする。そして、該グループの真中に位置するノズル(14)を基準に、上記(6)式と同様の式が成立するよう、夫々のノズル(13、14)のY軸方向における回転角度(θ)を可変調整する。同様に、上記真中に位置するノズル(14)と、ノズル(15)との間に、上記(7)式と同様の式が成立するよう、夫々のノズル(14、15)のY軸方向における回転角度(θ)を可変調整する。
【0043】
上記態様で、3本のノズルを1グループとして、各グループを構成するノズル同士が衝突しないように、各ノズルのY軸方向における回転角度(θ)の大きさを可変調整しつつ、ノズル取付部3の他方の端に位置するノズルに至る。
【0044】
例えば、ノズル取付部3に6本のノズルが配置されているような場合には、以下のようなグループ分けが行われ、上記と同様の態様で、各ノズルのY軸方向における回転角度(θ)の大きさが可変調整される。
【0045】
まず、ノズル取付部3の一方の端に位置するノズル(例えば符号11で示す)と、該ノズル11に隣接するノズル(例えば符号12で示す)と、該ノズル12に隣接するノズル(例えば符号13で示す)との3本のノズルを1グループとして、該グループの真中に位置するノズル12を基準に、上述した処理を実行する。次に、上記ノズル12、ノズル13と、該ノズル13に隣接するノズル(例えば符号14で示す)とを別の1グループとして、該グループの真中に位置するノズル13を基準に、上述した処理を実行する。次に、上記ノズル13、ノズル14と、該ノズル14に隣接するノズル(例えば符号15で示す)との3本のノズルを1グループとして、該グループの真中に位置するノズル14を基準に、上述した処理を実行する。このようにして、ノズル取付部3の他方の端に位置するノズル(例えば符号16で示す)に到達するまで、上記処理を実行する。
【0046】
上述した各ノズルに係わるグループ分けについては、上記態様以外にも種々のものが想定され得るので、グループ分けの仕方は、必ずしも上記内容のみに限定されない。
【0047】
図4は、本発明の一実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図である。
【0048】
このノズル位置制御装置は、図4に示すように、目標位置設定部21と、操作量生成部23と、操作量補正部25と、X軸アクチュエータ27と、Y軸アクチュエータ29と、左隣ノズル位置制御部31と、左側衝突防止部33と、基準角との比較部35と、右隣ノズル位置制御部37と、右側衝突防止部39と、補正量生成部41と、を含む。左側衝突防止部33は、左隣ノズル位置判定部43と、X軸衝突条件判定部45と、Y軸衝突条件判定部47と、を含み、右側衝突防止部39は、X軸衝突条件判定部49と、Y軸衝突条件判定部51と、右隣ノズル位置判定部53と、を含む。
【0049】
目標位置設定部21は、基準となるノズル(例えばノズル11〜13の3本を1グル−プとした場合、その真中に位置するノズル12)におけるX軸方向の回転角度(φ)、及びY軸方向の回転角度(θ)を、夫々設定する。目標位置設定部21により設定された上記X軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値は、操作量生成部23、及び基準角との比較部35に夫々出力される。
【0050】
操作量生成部23は、目標位置設定部21から与えられる上記基準となるノズル(12)のX軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値に基づき、該ノズル(12)の(X軸アクチュエータ、Y軸アクチュエータ)操作量を求めると共に、該求めた操作量を操作量補正部25に出力する。
【0051】
基準角との比較部35は、目標位置設定部21から出力されるノズル(12)のX軸方向の回転角度(φ)の値、及びY軸方向の回転角度(θ)の値と、基準角の値、即ち、90°(垂直)とを比較する。そして、該比較結果に基づき、対象となるノズル、即ち、ノズル12がその左隣のノズルであるノズル11側に傾斜しているのか、それとも、その右隣のノズルであるノズル13側に傾斜しているのかを判断する。基準角との比較部35は、上記判断した結果を、(左側衝突防止部33の)X軸衝突条件判定部45、又は(右側衝突防止部39の)X軸衝突条件判定部49に択一的に通知する。即ち、基準となるノズル(12)が、左側に傾いていれば(左側衝突防止部33の)X軸衝突条件判定部45に、右側に傾いていれば(右側衝突防止部39の)X軸衝突条件判定部49に、上記判断した結果が通知される。
【0052】
左側衝突防止部33において、左隣ノズル位置判定部43は、上記左側のノズルであるノズル11の位置制御を行う左隣ノズル位置制御部31から、X軸方向を中心とした回転角度(φ)データ、及びY軸方向を中心とした回転角度(θ)データを入力する。上記各回転角度データ(φ、θ)は、例えばポテンショメータのような回転角度センサからの出力信号を入力することによっても、取得することができる。左隣ノズル位置判定部43は、上記各回転角度データ(φ、θ)に基づいて、上記基準となるノズル(12)の左隣のノズル(11)の位置を判定する。そして、該判定した結果を、X軸衝突条件判定部45、及びY軸衝突条件判定部47に夫々通知する。
【0053】
X軸衝突条件判定部45は、基準角との比較部35から通知される上述した(回転角度データ(φ)に係わる)判断の結果と、左隣ノズル位置判定部43から通知される上述した判定の結果とに基づき、上記基準となるノズル(12)と、その左隣のノズル(11)とが衝突する条件を充足しているかどうか判定する。そして、その判定の結果を(例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で)、(左側衝突防止部33の)Y軸衝突条件判定部47に通知する。
【0054】
但し、本実施形態では、既述のように、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度(φ)の大きさは、何れも同一であり、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることは無いから、上記基準となるノズル(12)の左隣のノズルであるノズル(11)のX軸方向における衝突条件を判定する必要は無い。従って、基準角との比較部35からの上述した(回転角度データ(θ)に係わる)判断の結果は、X軸衝突条件判定部45を介して直接Y軸衝突条件判定部47に通知されることになる。
【0055】
Y軸衝突条件判定部47は、X軸衝突条件判定部45を介して基準角との比較部35から通知される上述した(回転角度データ(θ)に係わる)判断の結果と、左隣ノズル位置判定部43から通知される上述した判定の結果とに基づき、上記基準となるノズル(12)と、その左隣のノズル(11)とが衝突する条件を充足しているかどうか判定する。そして、その判定の結果を(例えば衝突すると判定した場合には論理レベル「1」、衝突しないと判定した場合には論理レベル「0」の2値化信号で)、補正量生成部41に通知する。Y軸衝突条件判定部47による上記判定は、例えば既述の(6)式が満足されるかどうかをチェックすることによって行われる。
【0056】
既述の(6)式が満足されていれば、上記基準となるノズル(12)が、その左隣のノズル(11)と衝突しないことを示しているので、Y軸衝突条件判定部47は、補正量が『0』である旨を、補正量生成部41に通知する。逆に、(6)式が満足されていなければ、つまり、上記基準となるノズル(12)とその左隣のノズル(11)とが衝突することを示していれば、Y軸衝突条件判定部47は、ノズル(11、12)同士が衝突する旨を、補正量生成部41に通知する。
【0057】
補正量生成部41は、Y軸衝突条件判定部47から、補正量が『0』である旨の通知を受けた場合には、補正量が『0』である旨を、ノズル(11、12)同士が衝突する旨の通知を受けた場合には、例えば既述の(6)式に基づいて、ノズル(11、12)同士の衝突を回避するための補正量(回転角度θの大きさ)を求め、該求めた補正量のデータを、操作量補正部25へ出力する。
【0058】
操作量補正部25は、補正量生成部41から上記補正量のデータが出力されると、操作量生成部23からのノズル(12)の操作量を、上記補正量により補正する(Y軸方向の回転角度(θ)を小さく設定し直す)と共に、該補正後の操作量で、ノズル(12)のY軸アクチュエータ29を駆動する。なお、Y軸方向の回転角度を0に設定することも可能であるが、その場合には、Y軸アクチュエータ29の駆動を停止させる(即ち、Y軸方向の回転を停止させる)ことになる。
【0059】
本実施形態では、既述のように、X軸、即ち、給水本管5を中心とする各ノズル11、12、及び13の回転角度(φ)の大きさは、何れも同一であり、各ノズル(11、12、13)別にX軸方向の回転角度(φ)が異なることは無いから、操作量補正部25は、X軸アクチュエータ27を駆動しない。
【0060】
右隣ノズル位置制御部37の構成、及び機能は、既に詳述した左隣ノズル位置制御部31の構成、及び機能と実質的に同一である。
【0061】
また、右側衝突防止部39の構成、及び機能についても、上述した左側衝突防止部33の構成、及び機能と実質的に同一である。即ち、右側衝突防止部39におけるX軸衝突条件判定部49は、左側衝突防止部33のX軸衝突条件判定部45に、また、右側衝突防止部39におけるY軸衝突条件判定部51は、左側衝突防止部33のY軸衝突条件判定部47に、更に、右側衝突防止部39における右隣ノズル位置判定部53は、左側衝突防止部33の左隣ノズル位置判定部43に、夫々対応する。
【0062】
既述の内容から明らかなように、上記基準となるノズル(12)が、その左隣のノズル(11)側に傾いているのか、それともその右隣のノズル(13)側に傾いているのかを、夫々左側衝突防止部33、右側衝突防止部39によってチェックする。よって、基準角との比較部35からの上記通知、及び左隣ノズル位置制御部31からの回転角度データに基づいて左側衝突防止部33が駆動しているときには、右側衝突防止部39は駆動停止状態に置かれる。これとは逆に、基準角との比較部35からの上記通知、及び右隣ノズル位置制御部37からの回転角度データに基づいて右側衝突防止部39が駆動しているときには、左側衝突防止部33は駆動停止状態に置かれる。換言すれば、左側衝突防止部33と右側衝突防止部39とは、択一的に駆動する。
【0063】
図5は、本発明の一実施形態の変形例に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図である。
【0064】
図5に示した例では、ノズル取付部155が円弧状に形成されており、複数個のノズル(11〜1n)がノズル取付部155の上部平面に、夫々所定の間隔を置いて配置されている。各ノズル(11〜1n)は、円弧状を呈するノズル取付部155の接線方向にX軸が、法線方向にY軸が、夫々設定されていて、X軸を中心として角度φだけ、また、Y軸を中心として角度θだけ、夫々正/逆方向に回転可能に構成されている。
【0065】
図5に示した例のように、各ノズル(11〜1n)のX軸の方向が同一でない場合には、図4において、左側衝突防止部33のX軸衝突条件判定部45は、基準角との比較部35から通知される判断結果と、左側ノズル位置判定部43から通知される判定結果とに基づき、既述のY軸衝突条件判定部47において行われたと同様な処理動作により、基準となるノズル(12)がその左隣のノズル(11)と衝突するかどうか判定する。X軸衝突条件判定部45が衝突しないと判定した場合には、Y軸衝突条件判定部45において上記ノズル(11、12)が衝突するかどうかの判定は行わず、補正量生成部41も、ノズル(11、12)同士の衝突を回避するための補正量(回転角度(φ、θ)の大きさ)を求める処理動作を行わない。右側衝突防止部39のX軸衝突条件判定部49、及びY軸衝突条件判定部51においても、上記と同様である。
【0066】
ここで、各ノズル(11〜1n)において、隣り合うノズルのX軸方向の回転角度(φ)の差分値が、互いに衝突することがない大きさ以上であれば、該隣り合うノズルのY軸方向の回転角度(θ)がどのような値であっても、該隣り合うノズル同士が衝突することは無い。よって、X軸衝突条件判定部(45、49)において、衝突しないと判定された隣り合うノズル同士については、Y軸衝突条件判定部(47、51)では判定を行わず、補正量生成部41においても、(補正量が『0』であるので)補正量を求めるための処理動作を行わない。
【0067】
なお、X軸衝突条件判定部(45/49)において、基準となるノズル(12)と隣り合うノズル(11/13)とが衝突すると判定された場合には、Y軸衝突条件判定部(47、51)において上記基準となるノズル(12)と隣り合うノズル(11/13)とが衝突するかどうか判定される。そして、補正量生成部41において、該判定結果に基づき、上記ノズル同士(12、11/13)の衝突を回避するためのX軸方向の回転角度(φ)、Y軸方向の回転角度(θ)の補正量が求められ、該求められた補正量が、補正量生成部41から操作量補正部25に出力される。操作量補正部25では、上記補正量によって補正した操作量に基づいて、X軸アクチュエータ27、及び/又はY軸アクチュエータ29の駆動を制御する。
【0068】
図6は、図5に記載の噴水装置において、隣り合うノズル(11、12/12、13)同士の衝突を回避するための演算処理の原理を示した図である。
【0069】
既述のように、各ノズル(11〜1n)は、円弧状を呈するノズル取付部155の接線方向に夫々X軸が、法線方向に夫々Y軸が設定されているので、各ノズル(11〜1n)のX軸方向は、夫々異なっている。ここで、隣り合うノズル(11、12/12、13)同士の間の距離をDとし、各ノズル(11〜1n)の長さをdとし、隣り合うノズル(11、12/12、13)同士の取付位置を結ぶ直線とノズル(11、12/12、13)とのなす角をλとすれば、下記の(8)式が成立する場合に、隣り合うノズル(11、12/12、13)同士が衝突することになる。
【0070】
2d=D/cosλ・・・・・・・(8)
よって、図5に記載の態様で、円弧状のノズル取付部155に配置されている複数個のノズル(11〜1n)同士が衝突するか否かの判定を行う場合には、図4で示したノズル位置制御装置のY軸衝突条件判定部(47/51)に上記(8)式を代入して所定の処理動作を実行することになる。
【0071】
図7は、本発明の他の実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図である。
【0072】
本実施形態に係るノズル位置制御装置では、隣り合うノズル同士(11、12/12、13)の衝突の防止に加えて、隣り合うノズル同士(11、12/12、13)から噴射される噴水同士の衝突をも防止することが可能なように構成されている。
【0073】
本実施形態に係るノズル位置制御装置では、図5で示した各部に加えて、更に、水圧制御部55、57、59と、左隣放水長決定部61と、放水長決定部63と、右隣放水長決定部65と、を備える点で、図5で示したノズル位置制御装置と相違する。なお、図7において、図5で示した物と同一物には同一符号を付して、それらの詳細な説明を省略する。
【0074】
水圧制御部57は、基準となるノズル(12)の左隣に位置するノズル(11)に対し、また、水圧制御部59は、上記基準となるノズル(12)に対し、更に、水圧制御部61は、上記基準となるノズル(12)の右隣に位置するノズル(13)に対し、夫々給水源(図示しない)から供給される水流の圧力を所定の値に制御する。
【0075】
左隣放水長決定部61は、水圧制御部55によって制御される水圧の大きさに基づき、上記左隣のノズル(11)から噴射される水流の放水長を求め、該求めた放水長データを、(左側衝突防止部33の)Y軸衝突条件判定部47へ通知する。また、放水長決定部63も、水圧制御部57によって制御される水圧の大きさに基づき、上記基準となるノズル(12)から噴射される水流の放水長を求め、該求めた放水長データを、(左側衝突防止部33の)Y軸衝突条件判定部47、及び(右側衝突防止部39の)Y軸衝突条件判定部51へ通知する。更に、右隣放水長決定部65も、水圧制御部59によって制御される水圧の大きさに基づき、上記右隣のノズル(13)から噴射される水流の放水長を求め、該求めた放水長データを、(右側衝突防止部39の)Y軸衝突条件判定部51へ通知する。
【0076】
(左側衝突防止部33の)Y軸衝突条件判定部47は、左隣放水長決定部61からの放水長データと、放水長決定部63からの放水長データとに基づき、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突するかどうか判定する。該判定の結果、双方の放水が衝突すると判定すれば、その旨を補正量生成部41へ通知する。この場合、上記基準となるノズル(12)からの放水と、上記右隣のノズル(13)からの放水とが衝突する虞は無いので、以下に説明する(右側衝突防止部39の)Y軸衝突条件判定部51での衝突するかどうかの判定は行われない。
【0077】
一方、(右側衝突防止部39の)Y軸衝突条件判定部51は、右隣放水長決定部65からの放水長データと、放水長決定部63からの放水長データとに基づき、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突するかどうか判定する。該判定の結果、双方の放水が衝突すると判定すれば、その旨を補正量生成部41へ通知する。この場合も上記と同様に、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水とが衝突する虞は無いので、(右側衝突防止部39の)Y軸衝突条件判定部51で衝突するかどうかの判定が行われた場合には、(左側衝突防止部33の)Y軸衝突条件判定部47での上述した衝突するかどうかの判定は行われない。
【0078】
補正量生成部41では、上記基準となるノズル(12)からの放水と、上記左隣のノズル(11)からの放水との衝突/上記基準となるノズル(12)からの放水と、上記右隣のノズル(13)からの放水との衝突、を回避することが可能な補正量(回転角度θの大きさ)を求め、該求めた補正量のデータを、操作量補正部25へ出力する。
【0079】
上述した内容から明らかなように、本実施形態では、各ノズル(11、12、13)のノズル長が、各ノズル(11、12、13)から噴射される水流の放水長に置き換えられた点で、上述した一実施形態と相違する。
【0080】
図7で示した構成のノズル位置制御装置を用いることによって、隣り合うノズル(11、12/12、13)から噴射される水流同士が衝突するのを回避することができる。
【0081】
以上、本発明の好適な実施形態を説明したが、これらは本発明の説明のための例示であって、本発明の範囲をこれらの実施形態にのみ限定する趣旨ではない。本発明は、他の種々の形態でも実施することが可能である。
【図面の簡単な説明】
【0082】
【図1】本発明の一実施形態に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図。
【図2】本発明の一実施形態に係る噴水装置における各ノズル(11〜1n)を回転駆動させるのに必要な構成の要部を示す説明図。
【図3】本発明の一実施形態に係る噴水装置において、各ノズル同士が互いに衝突すること無く回転動作を行うことが可能な各ノズルに対する制御態様を示す説明図。
【図4】本発明の一実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図。
【図5】本発明の一実施形態の変形例に係る噴水装置における複数個のノズルの配置態様の一例を示す部分斜視図。
【図6】図5に記載の噴水装置において、隣り合うノズル同士の衝突を回避するための演算処理の原理を示した図。
【図7】本発明の他の実施形態に係る噴水装置が備えるノズル位置制御装置の構成を示すブロック図。
【符号の説明】
【0083】
11〜1n ノズル
3 ノズル取付部
5 給水本管
7 第1の駆動装置
9 給水支管
11 ロータリー継ぎ手
13 出力管
15 支持部材
17 第2の駆動装置
21 目標位置設定部
23 操作量生成部
25 操作量補正部
27 X軸アクチュエータ
29 Y軸アクチュエータ
31 左隣ノズル位置制御部
33 左側衝突防止部
35 基準角との比較部
37 右隣ノズル位置制御部
39 右隣衝突防止部
41 補正量生成部
43 左隣ノズル位置決定部
45、49 X軸衝突条件判定部
47、51 Y軸衝突条件判定部
53 右隣ノズル位置決定部
【特許請求の範囲】
【請求項1】
各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、
前記各ノズル同士が接近する方向に動作した場合に、前記各ノズル同士が接近する方向に傾斜した角度と前記各ノズル同士の間隔とに基づいて、前記各ノズル同士が衝突するか否か予測する予測手段と、
前記予測手段が、前記各ノズル同士が衝突すると予測した場合に、前記各ノズル同士の衝突を回避させるべく前記各ノズルの動作を修正する修正手段と、
を備える噴水装置。
【請求項2】
請求項1記載の噴水装置において、
前記予測手段が、前記各ノズルからの水流の噴射長さと、前記各ノズルの傾斜角度と、前記各ノズル同士の間隔とに基づいて、前記各ノズルから噴射される水流同士が衝突するか否かを予測するようにした噴水装置。
【請求項3】
請求項2記載の噴水装置において、
前記修正手段が、前記予測手段が前記各ノズルから噴射される水流同士が衝突すると予測した場合に、前記各水流同士の衝突を回避させるべく前記各ノズルの動作を修正するようにした噴水装置。
【請求項4】
請求項1記載の噴水装置において、
前記各ノズルが、同一平面上のX軸方向、及び該X軸方向と直交するY軸方向に夫々回転可能に構成されており、
前記予測手段が、まず前記各ノズルがX軸方向に回転した状態で、前記各ノズル同士及び/又は前記各ノズルから噴射される水流同士が衝突するか否か予測し、次に前記各ノズルがY軸方向に回転した状態で、前記各ノズル同士及び/又は前記各ノズルから噴射される水流同士が衝突するか否か予測するようにした噴水装置。
【請求項5】
請求項1記載の噴水装置において、
前記各ノズルが、同一平面上のX軸方向、及び該X軸方向と直交するY軸方向に夫々回転可能に構成されており、且つ、前記各ノズルにおけるX軸方向が異なる場合に、前記予測手段が、前記各ノズル同士の間の実効距離を、前記各ノズル同士の間隔として、前記各ノズル同士が衝突するか否か及び/又は前記各ノズルから噴射される水流同士が衝突するか否かを予測するようにした噴水装置。
【請求項6】
各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、
前記各ノズル同士が接近する方向に動作した場合に、前記各ノズル同士が接近する方向に傾斜した角度と前記各ノズル同士の間隔とに基づいて、前記各ノズル同士が衝突するか否か予測するステップと、
前記予測するステップにおいて、前記各ノズル同士が衝突すると予測した場合に、前記各ノズル同士の衝突を回避させるべく前記各ノズルの動作を修正するステップと、
を備える噴水装置におけるノズルの衝突防止方法。
【請求項1】
各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、
前記各ノズル同士が接近する方向に動作した場合に、前記各ノズル同士が接近する方向に傾斜した角度と前記各ノズル同士の間隔とに基づいて、前記各ノズル同士が衝突するか否か予測する予測手段と、
前記予測手段が、前記各ノズル同士が衝突すると予測した場合に、前記各ノズル同士の衝突を回避させるべく前記各ノズルの動作を修正する修正手段と、
を備える噴水装置。
【請求項2】
請求項1記載の噴水装置において、
前記予測手段が、前記各ノズルからの水流の噴射長さと、前記各ノズルの傾斜角度と、前記各ノズル同士の間隔とに基づいて、前記各ノズルから噴射される水流同士が衝突するか否かを予測するようにした噴水装置。
【請求項3】
請求項2記載の噴水装置において、
前記修正手段が、前記予測手段が前記各ノズルから噴射される水流同士が衝突すると予測した場合に、前記各水流同士の衝突を回避させるべく前記各ノズルの動作を修正するようにした噴水装置。
【請求項4】
請求項1記載の噴水装置において、
前記各ノズルが、同一平面上のX軸方向、及び該X軸方向と直交するY軸方向に夫々回転可能に構成されており、
前記予測手段が、まず前記各ノズルがX軸方向に回転した状態で、前記各ノズル同士及び/又は前記各ノズルから噴射される水流同士が衝突するか否か予測し、次に前記各ノズルがY軸方向に回転した状態で、前記各ノズル同士及び/又は前記各ノズルから噴射される水流同士が衝突するか否か予測するようにした噴水装置。
【請求項5】
請求項1記載の噴水装置において、
前記各ノズルが、同一平面上のX軸方向、及び該X軸方向と直交するY軸方向に夫々回転可能に構成されており、且つ、前記各ノズルにおけるX軸方向が異なる場合に、前記予測手段が、前記各ノズル同士の間の実効距離を、前記各ノズル同士の間隔として、前記各ノズル同士が衝突するか否か及び/又は前記各ノズルから噴射される水流同士が衝突するか否かを予測するようにした噴水装置。
【請求項6】
各々噴射方向が変更可能な複数のノズルが配置された噴水装置において、
前記各ノズル同士が接近する方向に動作した場合に、前記各ノズル同士が接近する方向に傾斜した角度と前記各ノズル同士の間隔とに基づいて、前記各ノズル同士が衝突するか否か予測するステップと、
前記予測するステップにおいて、前記各ノズル同士が衝突すると予測した場合に、前記各ノズル同士の衝突を回避させるべく前記各ノズルの動作を修正するステップと、
を備える噴水装置におけるノズルの衝突防止方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−93580(P2008−93580A)
【公開日】平成20年4月24日(2008.4.24)
【国際特許分類】
【出願番号】特願2006−279071(P2006−279071)
【出願日】平成18年10月12日(2006.10.12)
【出願人】(598084666)株式会社第一テクノ (8)
【Fターム(参考)】
【公開日】平成20年4月24日(2008.4.24)
【国際特許分類】
【出願日】平成18年10月12日(2006.10.12)
【出願人】(598084666)株式会社第一テクノ (8)
【Fターム(参考)】
[ Back to top ]