
四重極型質量分析装置
【課題】所定質量範囲に亘る質量走査を繰り返すスキャン測定において、1回の走査の終了電圧から次の走査の開始電圧に電圧を戻す際にアンダーシュートなどが発生して電圧値が不安定になるため、適宜の待ち時間が必要である。この待ち時間をできるだけ短縮することにより、質量走査の繰り返し周期を短くして時間分解能を向上させる。
【解決手段】繰り返し質量走査における待ち時間は、従来、分析条件に依らず一定とされていた。これに対し、本発明に係る四重極型質量分析装置では、指定された質量範囲により走査終了質量と走査開始質量との質量差ΔMを計算し、この質量差に応じて異なるセトリングタイムを設定する。質量差ΔMが小さく電圧安定化時間が短くて済む場合には、相対的に小さなセトリングタイムが設定される。これにより、質量走査の繰り返し周期が短くなり、時間分解能が向上する。
【解決手段】繰り返し質量走査における待ち時間は、従来、分析条件に依らず一定とされていた。これに対し、本発明に係る四重極型質量分析装置では、指定された質量範囲により走査終了質量と走査開始質量との質量差ΔMを計算し、この質量差に応じて異なるセトリングタイムを設定する。質量差ΔMが小さく電圧安定化時間が短くて済む場合には、相対的に小さなセトリングタイムが設定される。これにより、質量走査の繰り返し周期が短くなり、時間分解能が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、イオンを質量(厳密にはm/z)に応じて分離する質量分析器として四重極質量フィルタを用いた四重極型質量分析装置に関する。
【背景技術】
【0002】
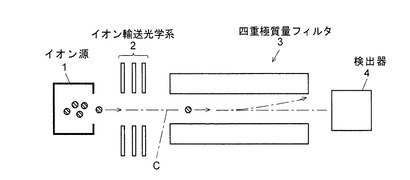
質量分析装置の1つとして、イオンを質量に応じて分離する質量分析器に四重極質量フィルタを用いた四重極型質量分析装置が知られている。図6は一般的な四重極型質量分析装置の概略構成図である。
【0003】
イオン源1において試料分子はイオン化され、発生したイオンはイオンレンズ等のイオン輸送光学系2により収束され(場合によっては加速もされ)、四重極質量フィルタ3の長軸方向の空間に導入される。四重極質量フィルタ3は、イオン光軸Cの周りに平行に配置された4本(図6では2本のみが描かれている)のロッド電極から成る。各ロッド電極には、それぞれ直流電圧±Uと高周波電圧±V・cosωtとが加算された電圧±(U+V・cosωt)が印加され、その印加電圧に応じて特定の質量を有するイオンのみが長軸方向の空間を選択的に通り抜け、それ以外のイオンは途中で発散する。検出器4は四重極質量フィルタ3を通り抜けてきたイオンの量に応じた電気信号を出力する。
【0004】
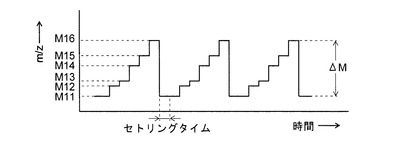
前述のように、四重極質量フィルタ3を通過するイオンの質量はロッド電極への印加電圧に応じて変化するから、この印加電圧を走査することにより、検出器4に到達するイオンの質量を所定質量範囲に亘って走査することができる。これが、四重極型質量分析装置におけるスキャン測定である。例えば、ガスクロマトグラフ質量分析装置(GC/MS)や液体クロマトグラフ質量分析装置(LC/MS)などのように、質量分析装置に導入される試料成分が時間経過に伴って変化する場合には、上記スキャン測定を繰り返すことにより、順次出現する各種成分をほぼ連続的に検出することができる。図7は、スキャン測定を繰り返す際に、検出器4に到達するイオンの質量変化を概略的に示す図である。
【0005】
このようなスキャン測定では、ロッド電極への印加電圧を最小質量M1に対応した電圧から徐々に増加させてゆき、最大質量M2に対応した電圧に到達したならば、電圧を最小質量M1に対応した電圧に速やかに戻す。このように電圧を急激に変化させるとオーバーシュート(アンダーシュート)が発生することが避けられないため、変化の後に電圧が安定するまでの待ち時間(セトリングタイム)が必要である。
【0006】
例えば特許文献1には、選択イオンモニタリング(SIM)測定においてセトリングタイムを設けることが不可避であると記載されているが、これはスキャン測定でも同様である。これにより、図7に示すように、1回の質量走査毎にセトリングタイムが設けられることになる。このセトリングタイムの期間中には、イオン源1に導入される成分の質量分析は実施されない。したがって、セトリングタイムが長いほど質量走査の時間間隔が開いてしまい、つまりは質量走査の周期が長くなり、時間分解能が低下することになる。
【0007】
また、一般に質量分析装置では、ユーザが観測したい質量範囲(図7の例ではM1〜M2)を指定すると、その範囲のマススペクトルが作成されるが、装置の内部動作としては、指定された質量範囲よりも上下に所定幅だけ拡げた質量範囲に亘る質量走査が実行される。即ち、M1〜M2の質量範囲が指定された場合でも、M1−ΔM1を質量走査の開始点、M2+ΔM2を質量走査の終了点として質量走査を実行する。これは、最初の目的イオンが四重極質量フィルタに入射してから出射するまでに時間が掛かるため、それまではその直前に四重極質量フィルタ3内部に残留している不所望のイオンが検出器4に到達してしまい、正確な信号強度を得られないためである。一例を挙げると、観測したい質量範囲がm/z100〜1000である場合、その質量範囲の上下にそれぞれm/z10だけ走査マージンを確保した、m/z90〜1010の質量範囲に亘る走査が実行される。
【0008】
このようにマススペクトル作成に必要な質量範囲の外側に設けられた、測定を安定に行うための走査マージンの期間も、上記セトリングタイムと同様に、実質的な質量分析には寄与しない期間である。したがって、分析の時間分解能を上げるためには、この走査マージン幅もできるだけ短くすることが好ましい。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2000−195464号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は上記課題に鑑みて成されたものであり、その主な目的は、所定質量範囲に亘る質量走査を繰り返す場合や所定の複数の質量を順次設定することを繰り返す場合に、実質的に質量分析に寄与しない時間をできるだけ短縮することにより、繰り返し周期を短縮して時間分解能を向上させることができる四重極型質量分析装置を提供することにある。
【課題を解決するための手段】
【0011】
上記課題を解決するために成された本発明は、特定の質量を持つイオンを選択的に通過させる四重極質量フィルタと、該四重極質量フィルタを通過したイオンを検出する検出器と、を具備し、前記四重極質量フィルタを通過するイオンの質量を所定の質量範囲に亘り走査するサイクルを繰り返すスキャン測定、又は複数の質量を順次設定するサイクルを繰り返す測定、を実行する四重極型質量分析装置において、
a)前記四重極質量フィルタを構成する各電極に所定の電圧を印加する四重極駆動手段と、
b)スキャン測定又は複数の質量を順次設定するサイクルを繰り返す測定に際し、質量に応じて前記四重極質量フィルタを構成する各電極への印加電圧を走査又は変更するべく前記四重極駆動手段を制御するとき、サイクルの開始質量と終了質量との質量差に応じて、1つのサイクルの終了から次のサイクルの開始までの待ち時間を変更する制御手段と、
を備えることを特徴としている。
【0012】
ここで、複数の質量を順次設定するサイクルを繰り返す測定としては、例えば、選択イオンモニタリング(SIM)測定や、より選択性の高い、MS/MS分析によるMRM測定などが挙げられる。
【0013】
従来の四重極型質量分析装置では、スキャン測定の際の質量範囲などの分析条件に拘わらず、1回の質量走査の終了時点から次の質量走査の開始時点までの待ち時間は一定であった。これに対し、本発明に係る四重極型質量分析装置では、制御手段は、スキャン測定において、走査開始質量と走査終了質量との差が小さいほど、待ち時間(セトリングタイム)を短く設定する。
【0014】
走査開始質量と走査終了質量との差が小さければ、四重極質量フィルタを構成する電極への印加電圧を走査開始質量に対応した電圧に戻す際のオーバーシュート(アンダーシュート)が相対的に小さく、電圧が安定するまでの時間が短い。したがって、上記待ち時間を短くしても、電圧が十分に安定した状態から次の質量走査を開始することができる。これによって、質量分析データの収集に寄与しない無駄な待ち時間が短くなり、スキャン測定における質量走査の繰り返し周期を短くすることができる。これは、所定の質量範囲を網羅的に走査するスキャン測定のみならず、1サイクル中で設定する質量の数が遙かに少ないSIM測定やMRM測定でも同様である。
【発明の効果】
【0015】
本発明に係る四重極型質量分析装置によれば、スキャン測定やSIM測定、MRM測定において、隣接するサイクル間で四重極質量フィルタへの印加電圧を変化させる際に、必要な時間以上の無用な待ち時間を短縮することができる。それにより、例えば走査速度が同じであっても、質量走査の繰り返し周期を短くすることができ、質量分析データが得られない、いわゆる不感時間を短くして、時間分解能を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例である四重極型質量分析装置の要部の構成図。
【図2】スキャン測定の際の質量変化の状態を示す図。
【図3】スキャン測定における走査開始質量と走査終了質量との質量差と必要な電圧安定化時間との関係の実測結果を示す図。
【図4】SIM測定の際の質量変化の状態を示す図。
【図5】走査速度及び走査開始質量と走査マージン幅との関係の実測結果を示す図。
【図6】一般的な四重極型質量分析装置のイオン光学系を中心とする概略構成図。
【図7】スキャン測定における質量変化の状態を概略的に示す図。
【発明を実施するための形態】
【0017】
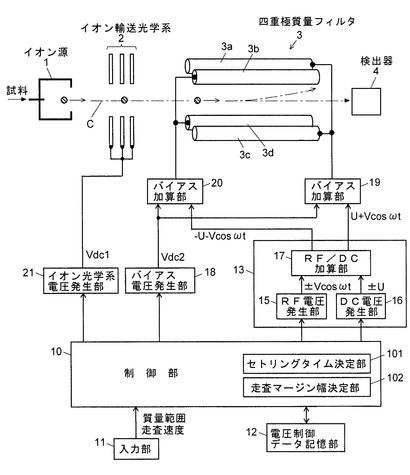
本発明の一実施例である四重極型質量分析装置について、添付図面を参照して説明する。図1は本実施例による四重極型質量分析装置の要部の構成図である。既に説明した図6と同じ構成要素には同じ符号を付している。この実施例による四重極型質量分析装置は、気体状の試料をイオン源1に導入するものであり、質量分析装置の前段にガスクロマトグラフを接続することができる。液体状の試料を分析する構成とする場合には、イオン源1としてエレクトロスプレイイオン源などの大気圧イオン源を用い、このイオン源1を略大気圧雰囲気とし、四重極質量フィルタ3や検出器4を高真空雰囲気中に配置するために多段差動排気系の構成とすればよい。その場合には、質量分析装置の前段に液体クロマトグラフを接続することができる。
【0018】
本実施例の四重極型質量分析装置において、図示しない真空室の内部には、既に述べたように、イオン源1、イオン輸送光学系2、四重極質量フィルタ3、及び検出器4が配設されている。四重極質量フィルタ3は、イオン光軸Cを中心とする所定半径の円筒に内接するように配置された4本のロッド電極3a、3b、3c、3dを備える。この4本のロッド電極3a、3b、3c、3dのうち、イオン光軸Cを挟んで対向する2本のロッド電極、つまりロッド電極3aと3c、ロッド電極3bと3dがそれぞれ接続されている。この4本のロッド電極3a、3b、3c、3dに電圧を印加する手段としての四重極駆動手段が、イオン選択用電圧発生部13、バイアス電圧発生部18、バイアス加算部19、20である。イオン選択用電圧発生部13は、直流(DC)電圧発生部16、高周波(RF)電圧発生部15、高周波/直流(RF/DC)加算部17を含む。
【0019】
イオン光学系電圧発生部21は、四重極質量フィルタ3の前段のイオン輸送光学系2に直流電圧Vdc1を印加する。制御部10は、イオン光学系電圧発生部21、イオン選択用電圧発生部13、バイアス電圧発生部18などの動作を制御するものであり、この制御を行うために電圧制御データ記憶部12が接続されている。また、制御部10にはオペレータが操作する入力部11も接続されている。なお、制御部10は、CPU、メモリなどを含んで構成されるコンピュータを中心にその機能が実現される。
【0020】
イオン選択用電圧発生部13にあって、直流電圧発生部16は、制御部10による制御の下に、互いに極性の異なる±Uなる直流電圧を発生する。高周波電圧発生部15は、同様に制御部10の制御の下に、互いに位相が180°異なる±V・cosωtなる高周波電圧を発生する。高周波/直流加算部17は直流電圧±Uと高周波電圧±V・cosωtとを加算、U+V・cosωt、及び、−(U+V・cosωt)なる2系統の電圧を発生する。これが、通過するイオンの質量(厳密にはm/z)を左右するイオン選択用電圧である。
【0021】
バイアス電圧発生部18は、四重極質量フィルタ3の長軸方向の空間に効率良くイオンが導入されるような直流電場を、四重極質量フィルタ3の手前に形成するために、イオン輸送光学系2に印加される直流電圧Vdc1との間の電圧差が適切になるように各ロッド電極3a〜3dに印加すべき共通の直流バイアス電圧Vdc2を生成する。バイアス加算部19はイオン選択用電圧U+V・cosωtと直流バイアス電圧Vdc2とを加算してVdc2+U+V・cosωtなる電圧をロッド電極3a、3cに印加し、バイアス加算部20はイオン選択用電圧−(U+V・cosωt)と直流バイアス電圧Vdc2とを加算し、Vdc2−(U+V・cosωt)なる電圧をロッド電極3b、3dに印加する。なお、直流バイアス電圧Vdc1、Vdc2は、標準試料などを用いて行われる自動チューニングにより、最適な値が設定されるようにすることができる。
【0022】
本実施例の四重極型質量分析装置は、四重極質量フィルタ3の各ロッド電極3a〜3dに印加する電圧(具体的には直流電圧U及び高周波電圧の振幅V)を走査することで、ユーザにより設定された質量範囲に亘る質量走査を繰り返す、スキャン測定を実行する。そのスキャン測定の際に、特徴的な電圧制御を実行する。この制御動作について、以下に説明する。
【0023】
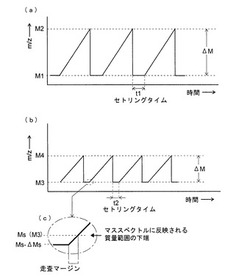
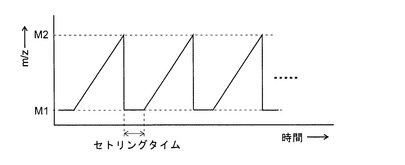
スキャン測定では、図2(a)に示すように、走査開始質量M1に対応した電圧から徐々に印加電圧を増加させてゆき、走査終了質量M2に対応した電圧に到達すると、印加電圧を走査開始質量M1に対応した電圧に速やかに戻す。これが1回の質量走査、つまり1サイクルである。電圧を急激に下げるとアンダーシュートが発生し、電圧値が落ち着くまでに或る程度の時間が必要である。そこで、電圧が安定するまで待って、それから次の質量走査のための電圧走査、つまり次のサイクルを開始する。アンダーシュート量は、その直前の電圧変化量、つまり走査終了電圧と走査開始電圧との電圧差が大きいほど大きくなる。したがって、電圧が安定するまでの時間(電圧安定化時間)は、走査終了質量M2と走査開始質量M1との質量差ΔMが大きいほど長くなる。
【0024】
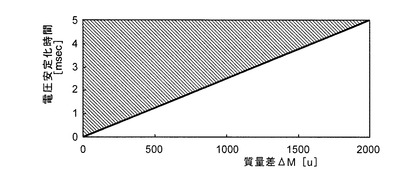
図3は、質量差ΔMと電圧安定化時間との関係を実測により調べた結果のグラフである。この結果によれば、例えば質量差ΔMが2000[u]である場合に5[msec]の電圧安定化時間が必要であるのに対し、質量差ΔMが200[u]である場合には0.5[msec]の電圧安定化時間で十分であることが分かる。従来の四重極型質量分析装置では、この質量差ΔMとは無関係に、最大の電圧安定化時間を考慮して一定のセトリングタイムが設定されていた。そのため、例えば5[msec]のセトリングタイムであれば、質量差ΔMが200[u]である場合に4.5[msec]の時間が無駄に費やされていることになる。図3中に斜線で示した三角形の領域が、従来、無駄に費やされている時間に相当する。ここでいう「無駄に費やされている時間」とは、既に電圧が安定しているにも拘わらず、次の質量走査を開始せずに待機している時間である。
【0025】
本実施例の四重極型質量分析装置では、上述した無駄に費やされている時間をできるだけ少なくするために、質量差ΔMに応じて次の質量走査開始までの待ち時間(つまりセトリングタイム)の長さを変更する。そのために、制御部10に含まれるセトリングタイム決定部101は、質量差ΔMから適切なセトリングタイムを導出するための情報を予め保持している。この情報は、例えば図3に示すような電圧安定化時間と質量差ΔMとの関係を示す直線を表す計算式やテーブルなどである。
【0026】
スキャン測定実施時には、その実施に先立ってユーザが入力部11から質量範囲や走査速度などを含む分析条件を設定する。すると制御部10において、セトリングタイム決定部101が、指定された質量範囲から質量差ΔMを計算し、上記のセトリングタイム導出用情報を用いてその質量差ΔMに対応するセトリングタイムを求める。これにより、質量差ΔMが大きいほど長いセトリングタイムが設定される。制御部10は指定された質量範囲に亘る質量走査を繰り返す際に、1回の質量走査が終了してから次の質量走査を開始するまでの待ち時間を、セトリングタイム決定部101が決定したセトリングタイムに設定する。その結果、図2(b)に示すように、質量差ΔMが小さい場合にはセトリングタイムt2は短くなり、質量走査の周期が実質的に短くなる。このセトリングタイムの期間は質量分析データが取得されない期間であるが、これが短くなることで、時間分解能が向上する。
【0027】
さらに本実施例の四重極型質量分析装置では、セトリングタイムのほか、質量走査の際の走査マージン幅ΔMsも分析条件に応じて変更するようにしている。走査マージン幅ΔMsとは、図2(c)に示すように、指定された走査開始質量Msと実際に質量走査を開始する質量との質量差である。理想的にはこの走査マージン幅ΔMsはゼロであるが、実際には、質量走査開始前に四重極質量フィルタ3内に残留している不要なイオンの影響を除くため、或る程度の走査マージン幅ΔMsを設定する必要がある。この場合、質量走査はMs−ΔMsから開始されるが、質量Msになるまでの間に取得されるデータは信頼性がないため廃棄され、実際にマススペクトルに反映されるのは質量Ms以上のデータである。なお、走査開始質量Ms以下の範囲のみならず、走査終了質量Me以上の範囲でも同様に走査マージンを設定するものとする。
【0028】
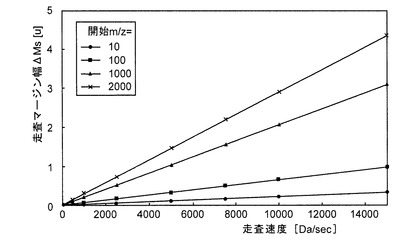
図5は、走査速度及び走査開始質量と走査マージン幅ΔMsとの関係を実測により調べた結果のグラフである。これは、異なる走査速度を設定した状態で、走査開始質量と走査マージン幅とをそれぞれ変化させながら信号強度の変化を観察し、信頼性のある信号強度が得られる走査マージン幅を調べたものである。走査速度が例えば1000[Da/sec]と遅い場合には、走査マージン幅ΔMsをかなり小さくしてもよいことが分かる。これに対し、走査速度が例えば15000[Da/sec]と速い場合には、走査マージン幅ΔMsも大きくする必要がある。これは、走査速度が速いほど、同じ走査マージン幅ΔMsであっても相当する時間が短くなるためである。また、走査開始質量が大きいと、走査マージン幅ΔMsを大きくする必要がある。これは、イオンの質量が大きいほど四重極質量フィルタ3を通り抜けるに要する時間が長くなるためである。一例として、走査速度15000[Da/sec]、走査開始質量1048[u]の場合、走査マージン幅ΔMsを3[u]とする必要がある。つまり、マススペクトルの下端質量は1048でも、実際にはm/z1045から質量走査を開始する必要がある。
【0029】
図5は、イオンの加速電圧、つまり四重極質量フィルタ3に印加される直流バイアス電圧Vdc2とイオン輸送光学系2に印加される直流バイアス電圧Vdc1との電圧差が一定であるという条件の下での結果であるが、必要な走査マージン幅ΔMsはイオン加速電圧にも依存することが実験から確認できる。即ち、走査マージン幅ΔMsは次式で求まる。
ΔMs=k×[走査速度]×[m/z値]1/2
ここで、kはイオンの加速電圧により決まる定数であり、加速電圧が大きいほど定数kは小さくなる。なお、定数kは四重極質量フィルタ3のロッド電極3a〜3dの長さにも依存するが、この長さはユーザにより設定される分析条件ではないため重要でない。
【0030】
従来の四重極型質量分析装置では、走査マージン幅ΔMsも上記セトリングタイムと同様に、最悪条件を考慮した固定の値に設定されている。そのため、走査速度が遅い場合や走査開始質量が小さい場合などにおいては、走査マージン幅は大きすぎ、この質量範囲を走査する時間の一部は上記の「無駄に費やされている時間」であると言える。これに対し、本実施例の四重極型質量分析装置では、走査速度、走査開始質量、及びイオン加速電圧に応じて走査マージン幅ΔMsを変更する。そのために、制御部10に含まれる走査マージン幅決定部102は、走査速度、走査開始質量、及びイオン加速電圧から適切な走査マージン幅ΔMsを導出するための情報を予め保持している。この情報は、例えば図5に示すような走査速度及び走査開始質量と走査マージン幅との関係を示す直線を表す計算式やテーブルなどである。さらに、イオンの加速電圧を決める直流バイアス電圧毎に異なる計算式やテーブルが用意される。
【0031】
スキャン測定実施時には、ユーザが質量範囲や走査速度などを含む分析条件を設定すると、制御部10において走査マージン幅決定部102は、上記の走査マージン幅導出用情報を用いて、指定された走査速度と、走査開始質量と、直流バイアス電圧Vdc1、Vdc2から決まる加速電圧と、に対応する走査マージン幅ΔMsを求める。直流バイアス電圧Vdc1、Vdc2は、ユーザにより設定される分析条件に依存するのではなく、通常、イオン強度を最大にするように自動的に実行されるチューニングの結果として決まるものである。
【0032】
これにより、走査速度が大きいほど、また走査開始質量が大きいほど、長い走査マージン幅が設定される。制御部10は指定された例えばM3〜M4の質量範囲に亘る質量走査を繰り返す際に、走査マージン幅決定部102が決定した走査マージン幅ΔMsに基づき、実際の質量走査範囲をM3−ΔMs〜M4+ΔMsと決める。走査速度が小さい(遅い)場合や走査開始質量が小さい場合には走査マージン幅は相対的に小さくなるから、質量走査の繰り返し周期が実質的に短くなる。この走査マージン幅の期間は有効な質量分析データが取得されない期間であるが、これが短くなることで時間分解能が向上する。
【0033】
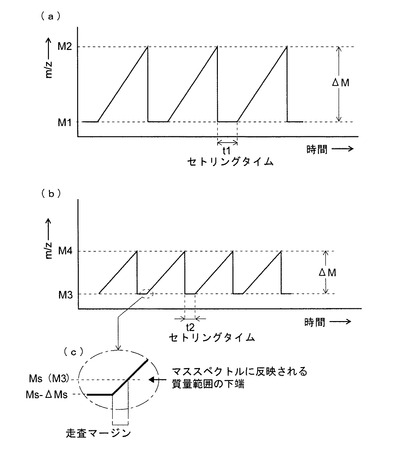
なお、上記説明ではスキャン測定を実行する場合について述べたが、図4に示すように、予め指定された複数の質量に対する質量分析を順番に実行するSIM測定を繰り返し実行する場合や、MS/MS分析でMRM測定を繰り返し実行する場合でも、上述したように、質量差ΔMに応じてセトリングタイムの長さを変更することが有効であることは当然である。
【0034】
また上記実施例では、質量走査に対し低質量から高質量の方向に走査を行うことを前提としており、これが一般的ではあるものの、逆に高質量から低質量の方向に走査を行うことも可能である。この場合にも上述した技術をそのまま利用することができる。
【0035】
また、上記実施例は本発明の一例であり、本発明の趣旨の範囲で適宜に変形、追加、修正を行っても本願請求の範囲に包含されることは明らかである。
【符号の説明】
【0036】
1…イオン源
2…イオン輸送光学系
3…四重極質量フィルタ
3a、3b、3c、3d…ロッド電極
4…検出器
10…制御部
101…セトリングタイム決定部
102…走査マージン幅決定部
11…入力部
12…電圧制御データ記憶部
13…イオン選択用電圧発生部
15…高周波電圧発生部
16…直流電圧発生部
17…高周波/直流加算部
18…バイアス電圧発生部
19、20…バイアス加算部
21…イオン光学系電圧発生部
【技術分野】
【0001】
本発明は、イオンを質量(厳密にはm/z)に応じて分離する質量分析器として四重極質量フィルタを用いた四重極型質量分析装置に関する。
【背景技術】
【0002】
質量分析装置の1つとして、イオンを質量に応じて分離する質量分析器に四重極質量フィルタを用いた四重極型質量分析装置が知られている。図6は一般的な四重極型質量分析装置の概略構成図である。
【0003】
イオン源1において試料分子はイオン化され、発生したイオンはイオンレンズ等のイオン輸送光学系2により収束され(場合によっては加速もされ)、四重極質量フィルタ3の長軸方向の空間に導入される。四重極質量フィルタ3は、イオン光軸Cの周りに平行に配置された4本(図6では2本のみが描かれている)のロッド電極から成る。各ロッド電極には、それぞれ直流電圧±Uと高周波電圧±V・cosωtとが加算された電圧±(U+V・cosωt)が印加され、その印加電圧に応じて特定の質量を有するイオンのみが長軸方向の空間を選択的に通り抜け、それ以外のイオンは途中で発散する。検出器4は四重極質量フィルタ3を通り抜けてきたイオンの量に応じた電気信号を出力する。
【0004】
前述のように、四重極質量フィルタ3を通過するイオンの質量はロッド電極への印加電圧に応じて変化するから、この印加電圧を走査することにより、検出器4に到達するイオンの質量を所定質量範囲に亘って走査することができる。これが、四重極型質量分析装置におけるスキャン測定である。例えば、ガスクロマトグラフ質量分析装置(GC/MS)や液体クロマトグラフ質量分析装置(LC/MS)などのように、質量分析装置に導入される試料成分が時間経過に伴って変化する場合には、上記スキャン測定を繰り返すことにより、順次出現する各種成分をほぼ連続的に検出することができる。図7は、スキャン測定を繰り返す際に、検出器4に到達するイオンの質量変化を概略的に示す図である。
【0005】
このようなスキャン測定では、ロッド電極への印加電圧を最小質量M1に対応した電圧から徐々に増加させてゆき、最大質量M2に対応した電圧に到達したならば、電圧を最小質量M1に対応した電圧に速やかに戻す。このように電圧を急激に変化させるとオーバーシュート(アンダーシュート)が発生することが避けられないため、変化の後に電圧が安定するまでの待ち時間(セトリングタイム)が必要である。
【0006】
例えば特許文献1には、選択イオンモニタリング(SIM)測定においてセトリングタイムを設けることが不可避であると記載されているが、これはスキャン測定でも同様である。これにより、図7に示すように、1回の質量走査毎にセトリングタイムが設けられることになる。このセトリングタイムの期間中には、イオン源1に導入される成分の質量分析は実施されない。したがって、セトリングタイムが長いほど質量走査の時間間隔が開いてしまい、つまりは質量走査の周期が長くなり、時間分解能が低下することになる。
【0007】
また、一般に質量分析装置では、ユーザが観測したい質量範囲(図7の例ではM1〜M2)を指定すると、その範囲のマススペクトルが作成されるが、装置の内部動作としては、指定された質量範囲よりも上下に所定幅だけ拡げた質量範囲に亘る質量走査が実行される。即ち、M1〜M2の質量範囲が指定された場合でも、M1−ΔM1を質量走査の開始点、M2+ΔM2を質量走査の終了点として質量走査を実行する。これは、最初の目的イオンが四重極質量フィルタに入射してから出射するまでに時間が掛かるため、それまではその直前に四重極質量フィルタ3内部に残留している不所望のイオンが検出器4に到達してしまい、正確な信号強度を得られないためである。一例を挙げると、観測したい質量範囲がm/z100〜1000である場合、その質量範囲の上下にそれぞれm/z10だけ走査マージンを確保した、m/z90〜1010の質量範囲に亘る走査が実行される。
【0008】
このようにマススペクトル作成に必要な質量範囲の外側に設けられた、測定を安定に行うための走査マージンの期間も、上記セトリングタイムと同様に、実質的な質量分析には寄与しない期間である。したがって、分析の時間分解能を上げるためには、この走査マージン幅もできるだけ短くすることが好ましい。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2000−195464号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は上記課題に鑑みて成されたものであり、その主な目的は、所定質量範囲に亘る質量走査を繰り返す場合や所定の複数の質量を順次設定することを繰り返す場合に、実質的に質量分析に寄与しない時間をできるだけ短縮することにより、繰り返し周期を短縮して時間分解能を向上させることができる四重極型質量分析装置を提供することにある。
【課題を解決するための手段】
【0011】
上記課題を解決するために成された本発明は、特定の質量を持つイオンを選択的に通過させる四重極質量フィルタと、該四重極質量フィルタを通過したイオンを検出する検出器と、を具備し、前記四重極質量フィルタを通過するイオンの質量を所定の質量範囲に亘り走査するサイクルを繰り返すスキャン測定、又は複数の質量を順次設定するサイクルを繰り返す測定、を実行する四重極型質量分析装置において、
a)前記四重極質量フィルタを構成する各電極に所定の電圧を印加する四重極駆動手段と、
b)スキャン測定又は複数の質量を順次設定するサイクルを繰り返す測定に際し、質量に応じて前記四重極質量フィルタを構成する各電極への印加電圧を走査又は変更するべく前記四重極駆動手段を制御するとき、サイクルの開始質量と終了質量との質量差に応じて、1つのサイクルの終了から次のサイクルの開始までの待ち時間を変更する制御手段と、
を備えることを特徴としている。
【0012】
ここで、複数の質量を順次設定するサイクルを繰り返す測定としては、例えば、選択イオンモニタリング(SIM)測定や、より選択性の高い、MS/MS分析によるMRM測定などが挙げられる。
【0013】
従来の四重極型質量分析装置では、スキャン測定の際の質量範囲などの分析条件に拘わらず、1回の質量走査の終了時点から次の質量走査の開始時点までの待ち時間は一定であった。これに対し、本発明に係る四重極型質量分析装置では、制御手段は、スキャン測定において、走査開始質量と走査終了質量との差が小さいほど、待ち時間(セトリングタイム)を短く設定する。
【0014】
走査開始質量と走査終了質量との差が小さければ、四重極質量フィルタを構成する電極への印加電圧を走査開始質量に対応した電圧に戻す際のオーバーシュート(アンダーシュート)が相対的に小さく、電圧が安定するまでの時間が短い。したがって、上記待ち時間を短くしても、電圧が十分に安定した状態から次の質量走査を開始することができる。これによって、質量分析データの収集に寄与しない無駄な待ち時間が短くなり、スキャン測定における質量走査の繰り返し周期を短くすることができる。これは、所定の質量範囲を網羅的に走査するスキャン測定のみならず、1サイクル中で設定する質量の数が遙かに少ないSIM測定やMRM測定でも同様である。
【発明の効果】
【0015】
本発明に係る四重極型質量分析装置によれば、スキャン測定やSIM測定、MRM測定において、隣接するサイクル間で四重極質量フィルタへの印加電圧を変化させる際に、必要な時間以上の無用な待ち時間を短縮することができる。それにより、例えば走査速度が同じであっても、質量走査の繰り返し周期を短くすることができ、質量分析データが得られない、いわゆる不感時間を短くして、時間分解能を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例である四重極型質量分析装置の要部の構成図。
【図2】スキャン測定の際の質量変化の状態を示す図。
【図3】スキャン測定における走査開始質量と走査終了質量との質量差と必要な電圧安定化時間との関係の実測結果を示す図。
【図4】SIM測定の際の質量変化の状態を示す図。
【図5】走査速度及び走査開始質量と走査マージン幅との関係の実測結果を示す図。
【図6】一般的な四重極型質量分析装置のイオン光学系を中心とする概略構成図。
【図7】スキャン測定における質量変化の状態を概略的に示す図。
【発明を実施するための形態】
【0017】
本発明の一実施例である四重極型質量分析装置について、添付図面を参照して説明する。図1は本実施例による四重極型質量分析装置の要部の構成図である。既に説明した図6と同じ構成要素には同じ符号を付している。この実施例による四重極型質量分析装置は、気体状の試料をイオン源1に導入するものであり、質量分析装置の前段にガスクロマトグラフを接続することができる。液体状の試料を分析する構成とする場合には、イオン源1としてエレクトロスプレイイオン源などの大気圧イオン源を用い、このイオン源1を略大気圧雰囲気とし、四重極質量フィルタ3や検出器4を高真空雰囲気中に配置するために多段差動排気系の構成とすればよい。その場合には、質量分析装置の前段に液体クロマトグラフを接続することができる。
【0018】
本実施例の四重極型質量分析装置において、図示しない真空室の内部には、既に述べたように、イオン源1、イオン輸送光学系2、四重極質量フィルタ3、及び検出器4が配設されている。四重極質量フィルタ3は、イオン光軸Cを中心とする所定半径の円筒に内接するように配置された4本のロッド電極3a、3b、3c、3dを備える。この4本のロッド電極3a、3b、3c、3dのうち、イオン光軸Cを挟んで対向する2本のロッド電極、つまりロッド電極3aと3c、ロッド電極3bと3dがそれぞれ接続されている。この4本のロッド電極3a、3b、3c、3dに電圧を印加する手段としての四重極駆動手段が、イオン選択用電圧発生部13、バイアス電圧発生部18、バイアス加算部19、20である。イオン選択用電圧発生部13は、直流(DC)電圧発生部16、高周波(RF)電圧発生部15、高周波/直流(RF/DC)加算部17を含む。
【0019】
イオン光学系電圧発生部21は、四重極質量フィルタ3の前段のイオン輸送光学系2に直流電圧Vdc1を印加する。制御部10は、イオン光学系電圧発生部21、イオン選択用電圧発生部13、バイアス電圧発生部18などの動作を制御するものであり、この制御を行うために電圧制御データ記憶部12が接続されている。また、制御部10にはオペレータが操作する入力部11も接続されている。なお、制御部10は、CPU、メモリなどを含んで構成されるコンピュータを中心にその機能が実現される。
【0020】
イオン選択用電圧発生部13にあって、直流電圧発生部16は、制御部10による制御の下に、互いに極性の異なる±Uなる直流電圧を発生する。高周波電圧発生部15は、同様に制御部10の制御の下に、互いに位相が180°異なる±V・cosωtなる高周波電圧を発生する。高周波/直流加算部17は直流電圧±Uと高周波電圧±V・cosωtとを加算、U+V・cosωt、及び、−(U+V・cosωt)なる2系統の電圧を発生する。これが、通過するイオンの質量(厳密にはm/z)を左右するイオン選択用電圧である。
【0021】
バイアス電圧発生部18は、四重極質量フィルタ3の長軸方向の空間に効率良くイオンが導入されるような直流電場を、四重極質量フィルタ3の手前に形成するために、イオン輸送光学系2に印加される直流電圧Vdc1との間の電圧差が適切になるように各ロッド電極3a〜3dに印加すべき共通の直流バイアス電圧Vdc2を生成する。バイアス加算部19はイオン選択用電圧U+V・cosωtと直流バイアス電圧Vdc2とを加算してVdc2+U+V・cosωtなる電圧をロッド電極3a、3cに印加し、バイアス加算部20はイオン選択用電圧−(U+V・cosωt)と直流バイアス電圧Vdc2とを加算し、Vdc2−(U+V・cosωt)なる電圧をロッド電極3b、3dに印加する。なお、直流バイアス電圧Vdc1、Vdc2は、標準試料などを用いて行われる自動チューニングにより、最適な値が設定されるようにすることができる。
【0022】
本実施例の四重極型質量分析装置は、四重極質量フィルタ3の各ロッド電極3a〜3dに印加する電圧(具体的には直流電圧U及び高周波電圧の振幅V)を走査することで、ユーザにより設定された質量範囲に亘る質量走査を繰り返す、スキャン測定を実行する。そのスキャン測定の際に、特徴的な電圧制御を実行する。この制御動作について、以下に説明する。
【0023】
スキャン測定では、図2(a)に示すように、走査開始質量M1に対応した電圧から徐々に印加電圧を増加させてゆき、走査終了質量M2に対応した電圧に到達すると、印加電圧を走査開始質量M1に対応した電圧に速やかに戻す。これが1回の質量走査、つまり1サイクルである。電圧を急激に下げるとアンダーシュートが発生し、電圧値が落ち着くまでに或る程度の時間が必要である。そこで、電圧が安定するまで待って、それから次の質量走査のための電圧走査、つまり次のサイクルを開始する。アンダーシュート量は、その直前の電圧変化量、つまり走査終了電圧と走査開始電圧との電圧差が大きいほど大きくなる。したがって、電圧が安定するまでの時間(電圧安定化時間)は、走査終了質量M2と走査開始質量M1との質量差ΔMが大きいほど長くなる。
【0024】
図3は、質量差ΔMと電圧安定化時間との関係を実測により調べた結果のグラフである。この結果によれば、例えば質量差ΔMが2000[u]である場合に5[msec]の電圧安定化時間が必要であるのに対し、質量差ΔMが200[u]である場合には0.5[msec]の電圧安定化時間で十分であることが分かる。従来の四重極型質量分析装置では、この質量差ΔMとは無関係に、最大の電圧安定化時間を考慮して一定のセトリングタイムが設定されていた。そのため、例えば5[msec]のセトリングタイムであれば、質量差ΔMが200[u]である場合に4.5[msec]の時間が無駄に費やされていることになる。図3中に斜線で示した三角形の領域が、従来、無駄に費やされている時間に相当する。ここでいう「無駄に費やされている時間」とは、既に電圧が安定しているにも拘わらず、次の質量走査を開始せずに待機している時間である。
【0025】
本実施例の四重極型質量分析装置では、上述した無駄に費やされている時間をできるだけ少なくするために、質量差ΔMに応じて次の質量走査開始までの待ち時間(つまりセトリングタイム)の長さを変更する。そのために、制御部10に含まれるセトリングタイム決定部101は、質量差ΔMから適切なセトリングタイムを導出するための情報を予め保持している。この情報は、例えば図3に示すような電圧安定化時間と質量差ΔMとの関係を示す直線を表す計算式やテーブルなどである。
【0026】
スキャン測定実施時には、その実施に先立ってユーザが入力部11から質量範囲や走査速度などを含む分析条件を設定する。すると制御部10において、セトリングタイム決定部101が、指定された質量範囲から質量差ΔMを計算し、上記のセトリングタイム導出用情報を用いてその質量差ΔMに対応するセトリングタイムを求める。これにより、質量差ΔMが大きいほど長いセトリングタイムが設定される。制御部10は指定された質量範囲に亘る質量走査を繰り返す際に、1回の質量走査が終了してから次の質量走査を開始するまでの待ち時間を、セトリングタイム決定部101が決定したセトリングタイムに設定する。その結果、図2(b)に示すように、質量差ΔMが小さい場合にはセトリングタイムt2は短くなり、質量走査の周期が実質的に短くなる。このセトリングタイムの期間は質量分析データが取得されない期間であるが、これが短くなることで、時間分解能が向上する。
【0027】
さらに本実施例の四重極型質量分析装置では、セトリングタイムのほか、質量走査の際の走査マージン幅ΔMsも分析条件に応じて変更するようにしている。走査マージン幅ΔMsとは、図2(c)に示すように、指定された走査開始質量Msと実際に質量走査を開始する質量との質量差である。理想的にはこの走査マージン幅ΔMsはゼロであるが、実際には、質量走査開始前に四重極質量フィルタ3内に残留している不要なイオンの影響を除くため、或る程度の走査マージン幅ΔMsを設定する必要がある。この場合、質量走査はMs−ΔMsから開始されるが、質量Msになるまでの間に取得されるデータは信頼性がないため廃棄され、実際にマススペクトルに反映されるのは質量Ms以上のデータである。なお、走査開始質量Ms以下の範囲のみならず、走査終了質量Me以上の範囲でも同様に走査マージンを設定するものとする。
【0028】
図5は、走査速度及び走査開始質量と走査マージン幅ΔMsとの関係を実測により調べた結果のグラフである。これは、異なる走査速度を設定した状態で、走査開始質量と走査マージン幅とをそれぞれ変化させながら信号強度の変化を観察し、信頼性のある信号強度が得られる走査マージン幅を調べたものである。走査速度が例えば1000[Da/sec]と遅い場合には、走査マージン幅ΔMsをかなり小さくしてもよいことが分かる。これに対し、走査速度が例えば15000[Da/sec]と速い場合には、走査マージン幅ΔMsも大きくする必要がある。これは、走査速度が速いほど、同じ走査マージン幅ΔMsであっても相当する時間が短くなるためである。また、走査開始質量が大きいと、走査マージン幅ΔMsを大きくする必要がある。これは、イオンの質量が大きいほど四重極質量フィルタ3を通り抜けるに要する時間が長くなるためである。一例として、走査速度15000[Da/sec]、走査開始質量1048[u]の場合、走査マージン幅ΔMsを3[u]とする必要がある。つまり、マススペクトルの下端質量は1048でも、実際にはm/z1045から質量走査を開始する必要がある。
【0029】
図5は、イオンの加速電圧、つまり四重極質量フィルタ3に印加される直流バイアス電圧Vdc2とイオン輸送光学系2に印加される直流バイアス電圧Vdc1との電圧差が一定であるという条件の下での結果であるが、必要な走査マージン幅ΔMsはイオン加速電圧にも依存することが実験から確認できる。即ち、走査マージン幅ΔMsは次式で求まる。
ΔMs=k×[走査速度]×[m/z値]1/2
ここで、kはイオンの加速電圧により決まる定数であり、加速電圧が大きいほど定数kは小さくなる。なお、定数kは四重極質量フィルタ3のロッド電極3a〜3dの長さにも依存するが、この長さはユーザにより設定される分析条件ではないため重要でない。
【0030】
従来の四重極型質量分析装置では、走査マージン幅ΔMsも上記セトリングタイムと同様に、最悪条件を考慮した固定の値に設定されている。そのため、走査速度が遅い場合や走査開始質量が小さい場合などにおいては、走査マージン幅は大きすぎ、この質量範囲を走査する時間の一部は上記の「無駄に費やされている時間」であると言える。これに対し、本実施例の四重極型質量分析装置では、走査速度、走査開始質量、及びイオン加速電圧に応じて走査マージン幅ΔMsを変更する。そのために、制御部10に含まれる走査マージン幅決定部102は、走査速度、走査開始質量、及びイオン加速電圧から適切な走査マージン幅ΔMsを導出するための情報を予め保持している。この情報は、例えば図5に示すような走査速度及び走査開始質量と走査マージン幅との関係を示す直線を表す計算式やテーブルなどである。さらに、イオンの加速電圧を決める直流バイアス電圧毎に異なる計算式やテーブルが用意される。
【0031】
スキャン測定実施時には、ユーザが質量範囲や走査速度などを含む分析条件を設定すると、制御部10において走査マージン幅決定部102は、上記の走査マージン幅導出用情報を用いて、指定された走査速度と、走査開始質量と、直流バイアス電圧Vdc1、Vdc2から決まる加速電圧と、に対応する走査マージン幅ΔMsを求める。直流バイアス電圧Vdc1、Vdc2は、ユーザにより設定される分析条件に依存するのではなく、通常、イオン強度を最大にするように自動的に実行されるチューニングの結果として決まるものである。
【0032】
これにより、走査速度が大きいほど、また走査開始質量が大きいほど、長い走査マージン幅が設定される。制御部10は指定された例えばM3〜M4の質量範囲に亘る質量走査を繰り返す際に、走査マージン幅決定部102が決定した走査マージン幅ΔMsに基づき、実際の質量走査範囲をM3−ΔMs〜M4+ΔMsと決める。走査速度が小さい(遅い)場合や走査開始質量が小さい場合には走査マージン幅は相対的に小さくなるから、質量走査の繰り返し周期が実質的に短くなる。この走査マージン幅の期間は有効な質量分析データが取得されない期間であるが、これが短くなることで時間分解能が向上する。
【0033】
なお、上記説明ではスキャン測定を実行する場合について述べたが、図4に示すように、予め指定された複数の質量に対する質量分析を順番に実行するSIM測定を繰り返し実行する場合や、MS/MS分析でMRM測定を繰り返し実行する場合でも、上述したように、質量差ΔMに応じてセトリングタイムの長さを変更することが有効であることは当然である。
【0034】
また上記実施例では、質量走査に対し低質量から高質量の方向に走査を行うことを前提としており、これが一般的ではあるものの、逆に高質量から低質量の方向に走査を行うことも可能である。この場合にも上述した技術をそのまま利用することができる。
【0035】
また、上記実施例は本発明の一例であり、本発明の趣旨の範囲で適宜に変形、追加、修正を行っても本願請求の範囲に包含されることは明らかである。
【符号の説明】
【0036】
1…イオン源
2…イオン輸送光学系
3…四重極質量フィルタ
3a、3b、3c、3d…ロッド電極
4…検出器
10…制御部
101…セトリングタイム決定部
102…走査マージン幅決定部
11…入力部
12…電圧制御データ記憶部
13…イオン選択用電圧発生部
15…高周波電圧発生部
16…直流電圧発生部
17…高周波/直流加算部
18…バイアス電圧発生部
19、20…バイアス加算部
21…イオン光学系電圧発生部
【特許請求の範囲】
【請求項1】
特定の質量を持つイオンを選択的に通過させる四重極質量フィルタと、該四重極質量フィルタを通過したイオンを検出する検出器と、を具備し、前記四重極質量フィルタを通過するイオンの質量を所定の質量範囲に亘り走査するサイクルを繰り返すスキャン測定、又は複数の質量を順次設定するサイクルを繰り返す測定を実行する四重極型質量分析装置において、
a)前記四重極質量フィルタを構成する各電極に所定の電圧を印加する四重極駆動手段と、
b)スキャン測定又は複数の質量を順次設定するサイクルを繰り返す測定に際し、質量に応じて前記四重極質量フィルタを構成する各電極への印加電圧を走査又は変更するべく前記四重極駆動手段を制御するとき、サイクルの開始質量と終了質量との質量差に応じて、1つのサイクルの終了から次のサイクルの開始までの待ち時間を変更する制御手段と、
を備えることを特徴とする四重極型質量分析装置。
【請求項2】
請求項1に記載の四重極型質量分析装置であって、
前記制御手段は、サイクルの開始質量と終了質量との質量差が小さいほど、前記待ち時間を短くすることを特徴とする四重極型質量分析装置。
【請求項1】
特定の質量を持つイオンを選択的に通過させる四重極質量フィルタと、該四重極質量フィルタを通過したイオンを検出する検出器と、を具備し、前記四重極質量フィルタを通過するイオンの質量を所定の質量範囲に亘り走査するサイクルを繰り返すスキャン測定、又は複数の質量を順次設定するサイクルを繰り返す測定を実行する四重極型質量分析装置において、
a)前記四重極質量フィルタを構成する各電極に所定の電圧を印加する四重極駆動手段と、
b)スキャン測定又は複数の質量を順次設定するサイクルを繰り返す測定に際し、質量に応じて前記四重極質量フィルタを構成する各電極への印加電圧を走査又は変更するべく前記四重極駆動手段を制御するとき、サイクルの開始質量と終了質量との質量差に応じて、1つのサイクルの終了から次のサイクルの開始までの待ち時間を変更する制御手段と、
を備えることを特徴とする四重極型質量分析装置。
【請求項2】
請求項1に記載の四重極型質量分析装置であって、
前記制御手段は、サイクルの開始質量と終了質量との質量差が小さいほど、前記待ち時間を短くすることを特徴とする四重極型質量分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−219066(P2010−219066A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2010−141741(P2010−141741)
【出願日】平成22年6月22日(2010.6.22)
【分割の表示】特願2010−514262(P2010−514262)の分割
【原出願日】平成20年5月26日(2008.5.26)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成22年6月22日(2010.6.22)
【分割の表示】特願2010−514262(P2010−514262)の分割
【原出願日】平成20年5月26日(2008.5.26)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]