
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラムに関する。
【背景技術】
【0002】
ハイブリッド自動車は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、減速中は、電動機により回生発電が可能である。回生発電を行う際には、電動機に回生トルクが発生する。この回生トルクは、ハイブリッド自動車の走行におけるフリクションとなりエンジンブレーキと同様に制動力になる(たとえば特許文献1参照)。なお、電動機の回生トルクは、電動機の回生電力に比例する。すなわち電動機の回生電力が多いほど電動機の回生トルクも大きい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−223421号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、ハイブリッド自動車における電動機の回生トルクは、エンジンブレーキと同様に、制動力になる。しかしながら、ハイブリッド自動車の積載貨物の重量、またはハイブリッド自動車が走行中の路面の下り勾配の状態などによって、電動機の回生トルクをハイブリッド自動車の制動力として利用する場合、制動力が不足することがある。このような状態では、運転者が要求する制動力を満足させられない場合があり、運転者は、制動力不足を感じ、ドライバビリティの悪化を招く場合がある。
【0005】
本発明は、このような背景の下に行われたものであって、電動機の回生トルクを制動力として利用する際のドライバビリティを向上させることができる回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1つの観点は、回生制御装置としての観点である。本発明の回生制御装置は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であると共に、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御装置において、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する第一の比較手段と、電動機が最大の回生トルクを発生しているにも係わらず第一の比較手段の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する制御手段と、を有するものである。
【0007】
たとえば、所定のパターンは、上述した状態が所定の時間継続するパターンである。あるいは、所定のパターンは、上述した状態が所定の時間継続する状態が所定回数繰り返されるパターンである。
【0008】
さらに、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する際に、目標減速度とエンジンのエンジンブレーキおよび電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較手段を有し、制御手段は、第二の比較手段の比較結果により実減速度が目標減速度に達しており、このときの電動機の回生トルクが所定値以下であるときには、電動機のみによる走行形態とし、電動機の回生トルクを制動力として利用するように制御することができる。
【0009】
さらに、制御手段は、ハイブリッド自動車の始動時から最初の減速時には、電動機のみによる減速を実施し、電動機の回生発電により生じる回生トルクを制動力として利用することができる。
【0010】
本発明の他の観点は、ハイブリッド自動車としての観点である。本発明のハイブリッド自動車は、本発明の回生制御装置を有するものである。
【0011】
本発明のさらに他の観点は、回生制御方法としての観点である。本発明の回生制御方法は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であると共に、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御方法において、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する第一の比較ステップと、電動機が最大の回生トルクを発生しているにも係わらず第一の比較ステップの比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用するステップと、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する際に、目標減速度とエンジンのエンジンブレーキおよび電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較ステップと、第二の比較ステップの比較結果により実減速度が目標減速度に達しており、このときの電動機の回生トルクが所定値以下であるときには、電動機のみによる走行形態とし、電動機の回生トルクを制動力として利用するステップと、を有するものである。
【0012】
本発明のさらに他の観点は、プログラムとしての観点である。本発明のプログラムは、情報処理装置に、本発明の回生制御装置の機能を実現させるものである。
【発明の効果】
【0013】
本発明によれば、電動機の回生トルクを制動力として利用する際のドライバビリティを向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図2】図1のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図3】バッテリのSOC(State of Charge)と電動機の回生電力の上限値との関係を示す図である。
【図4】図2の回生制御部の処理(その1)を示すフローチャートである。
【図5】図2の回生制御部の処理でキースイッチのON/OFFに係わる処理を示すフローチャートである。
【図6】図2の回生制御部の処理(その2)を示すフローチャートである。
【図7】図2の回生制御部の回生制御における減速度と電動機回転速度との関係を示す図であり、目標減速度に対して実減速度が不足する場合を示す図である。
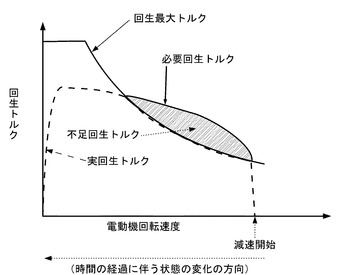
【図8】図2の回生制御部の回生制御における回生トルクと電動機回転速度との関係を示す図であり、回生最大トルクに対して不足回生トルクが生じている場合を示す図である。
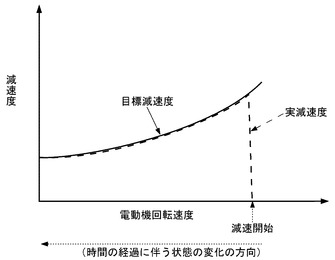
【図9】図2の回生制御部の回生制御における減速度と電動機回転速度との関係を示す図であり、目標減速度に実減速度が追随する場合を示す図である。
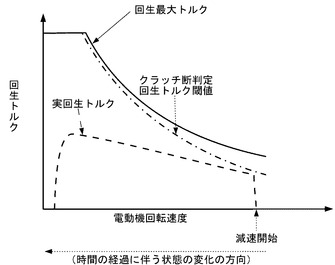
【図10】図2の回生制御部の回生制御における回生トルクと電動機回転速度との関係を示す図であり、実回生トルクがクラッチ断判定回生トルク閾値以下である場合を示す図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態のハイブリッド自動車について、図1〜図10を参照しながら説明する。
【0016】
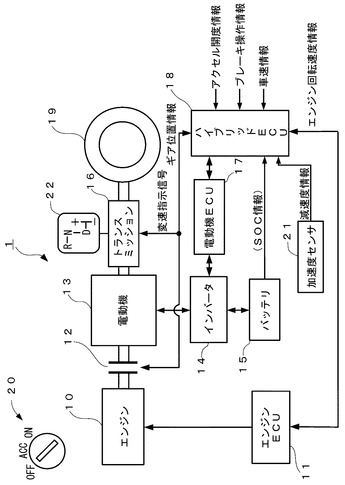
図1は、ハイブリッド自動車1の構成の例を示すブロック図である。ハイブリッド自動車1は、車両の一例である。ハイブリッド自動車1は、半自動トランスミッションの変速機を介したエンジン(内燃機関)10および/または電動機13によって駆動され、減速時には、電動機13の回生トルクによってエンジン10のエンジンブレーキのような制動力を発生させることができる。なお、半自動トランスミッションとは、マニュアルトランスミッションと同じ構成を有しながら変速操作を自動的に行うことができるトランスミッションである。
【0017】
ハイブリッド自動車1は、エンジン10、エンジンECU(Electronic Control Unit)11、クラッチ12、電動機13、インバータ14、バッテリ15、トランスミッション16、電動機ECU17、ハイブリッドECU18、車輪19、キースイッチ20、加速度センサ21、およびシフト部22を有して構成される。なお、トランスミッション16は、上述した半自動トランスミッションを有し、ドライブレンジ(以下では、D(Drive)レンジと記す)を有するシフト部22により操作される。シフト部22がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0018】
エンジン10は、内燃機関の一例であり、エンジンECU11によって制御され、ガソリン、軽油、CNG(Compressed Natural Gas)、LPG(Liquefied Petroleum Gas)、または代替燃料等を内部で燃焼させて、軸を回転させる動力を発生させ、発生した動力をクラッチ12に伝達する。
【0019】
エンジンECU11は、ハイブリッドECU18からの指示に従うことにより、電動機ECU17と連携動作するコンピュータであり、燃料噴射量やバルブタイミングなど、エンジン10を制御する。たとえば、エンジンECU11は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、マイクロプロセッサ(マイクロコンピュータ)、DSP(Digital Signal Processor)などにより構成され、内部に、演算部、メモリ、およびI/O(Input/Output)ポートなどを有する。
【0020】
クラッチ12は、ハイブリッドECU18によって制御され、エンジン10からの軸出力を、電動機13およびトランスミッション16を介して車輪19に伝達する。すなわち、クラッチ12は、ハイブリッドECU18の制御によって、エンジン10の回転軸と電動機13の回転軸とを機械的に接続することにより、エンジン10の軸出力を電動機13に伝達させたり、または、エンジン10の回転軸と電動機13の回転軸との機械的な接続を切断することにより、エンジン10の軸と、電動機13の回転軸とが互いに異なる回転速度で回転できるようにする。
【0021】
たとえば、クラッチ12は、エンジン10の動力によってハイブリッド自動車1が走行し、これにより電動機13に発電させる場合、電動機13の駆動力によってエンジン10がアシストされる場合、および電動機13によってエンジン10を始動させる場合などに、エンジン10の回転軸と電動機13の回転軸とを機械的に接続する。
【0022】
また、たとえば、クラッチ12は、エンジン10が停止またはアイドリング状態にあり、電動機13の駆動力によってハイブリッド自動車1が走行している場合、およびエンジン10が停止またはアイドリング状態にあり、ハイブリッド自動車1が減速中または下り坂を走行中であり、電動機13が発電している(電力回生している)場合、エンジン10の回転軸と電動機13の回転軸との機械的な接続を切断する。
【0023】
なお、クラッチ12は、運転者がクラッチペダルを操作して動作しているクラッチとは異なるものであり、ハイブリッドECU18の制御によって動作する。
【0024】
電動機13は、いわゆる、モータジェネレータであり、インバータ14から供給された電力により、軸を回転させる動力を発生させて、その軸出力をトランスミッション16に供給するか、またはトランスミッション16から供給された軸を回転させる動力によって発電し、その電力をインバータ14に供給する。たとえば、ハイブリッド自動車1が加速しているとき、または定速で走行しているときにおいて、電動機13は、軸を回転させる動力を発生させて、その軸出力をトランスミッション16に供給し、エンジン10と協働してハイブリッド自動車1を走行させる。また、たとえば、電動機13がエンジン10によって駆動されているとき、またはハイブリッド自動車1が減速しているとき、もしくは下り坂を走行しているときなどにおいて、電動機13は、発電機として動作し、この場合、トランスミッション16から供給された軸を回転させる動力によって発電して、電力をインバータ14に供給し、バッテリ15が充電される。前述したように、電動機13が発電している状態は、ハイブリッド自動車1が「バッテリ15への回生」を行っている状態であり、電動機13は、回生電力に応じた大きさの回生トルクを発生する。
【0025】
インバータ14は、電動機ECU17によって制御され、バッテリ15からの直流電圧を交流電圧に変換するか、または電動機13からの交流電圧を直流電圧に変換する。電動機13が動力を発生させる場合、インバータ14は、バッテリ15の直流電圧を交流電圧に変換して、電動機13に電力を供給する。電動機13が発電する場合、インバータ14は、電動機13からの交流電圧を直流電圧に変換する。すなわち、この場合、インバータ14は、バッテリ15に直流電圧を供給するための整流器および電圧調整装置としての役割を果たす。
【0026】
バッテリ15は、充放電可能な二次電池であり、電動機13が動力を発生させるとき、電動機13にインバータ14を介して電力を供給するか、または電動機13が発電しているとき、電動機13が発電する電力によって充電される。バッテリ15には、適切な充電状態(以下では、SOC(State of Charge)と称する)の範囲が決められており、SOCがその範囲を外れないように管理されている。
【0027】
トランスミッション16は、ハイブリッドECU18からの変速指示信号に従って、複数のギア比(変速比)のいずれかを選択する半自動トランスミッション(図示せず)を有し、変速比を切り換えて、変速されたエンジン10の動力および/または電動機13の動力を車輪19に伝達する。また、減速しているとき、もしくは下り坂を走行しているときなど、トランスミッション16は、車輪19からの動力を電動機13に伝達する。なお、半自動トランスミッションは、運転者がシフト部22を操作して手動で任意のギア段にギア位置を変更することもできる。
【0028】
電動機ECU17は、ハイブリッドECU18からの指示に従うことにより、エンジンECU11と連携動作するコンピュータであり、インバータ14を制御することによって電動機13を制御する。たとえば、電動機ECU17は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0029】
ハイブリッドECU18は、コンピュータの一例であり、ハイブリッド走行のために、アクセル開度情報、ブレーキ操作情報、車速情報、トランスミッション16から取得したギア位置情報、エンジンECU11から取得したエンジン回転速度情報、およびバッテリ15から取得したSOC情報に基づいて、クラッチ12を制御すると共に、変速指示信号を供給することでトランスミッション16を制御し、電動機ECU17に対して電動機13およびインバータ14の制御指示を与え、エンジンECU11に対してエンジン10の制御指示を与える。これらの制御指示には、後述する回生制御指示も含まれる。たとえば、ハイブリッドECU18は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0030】
なお、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18の内部の不揮発性のメモリにあらかじめ記憶しておくことで、コンピュータであるハイブリッドECU18にあらかじめインストールしておくことができる。
【0031】
エンジンECU11、電動機ECU17、およびハイブリッドECU18は、CAN(Control Area Network)などの規格に準拠したバスなどにより相互に接続されている。
【0032】
車輪19は、路面に駆動力を伝達する駆動輪である。なお、図1において、1つの車輪19のみが図示されているが、実際には、ハイブリッド自動車1は、複数の車輪19を有する。
【0033】
キースイッチ20は、運転を開始するときにユーザにより、たとえばキーが差し込まれてON/OFFされるスイッチであり、これがON状態になることによってハイブリッド自動車1の各部は起動し、キースイッチ20がOFF状態になることによってハイブリッド自動車1の各部は停止する。
【0034】
加速度センサ21は、ハイブリッド自動車1の加速度を感知してハイブリッドECU18に加速度情報として伝達するものである。しかしながら、本実施の形態では、ハイブリッドECU18は、加速度センサ21によって、ハイブリッド自動車1の減速度情報を取得しているので、図1では、加速度センサ21からハイブリッドECU18に対して、減速度情報が伝達されているとして図示してある。
【0035】
シフト部22は、既に説明したように、トランスミッション16の半自動トランスミッションに運転者からの指示を与えるものであり、シフト部22がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0036】
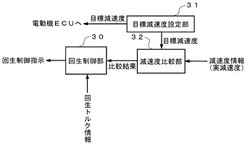
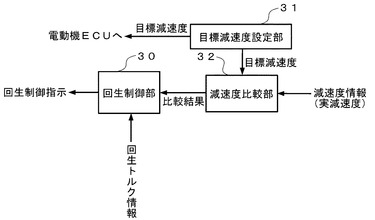
図2は、プログラムを実行するハイブリッドECU18において実現される機能の構成の例を示すブロック図である。すなわち、ハイブリッドECU18がプログラムを実行すると、回生制御部30、目標減速度設定部31、および減速度比較部32の機能が実現される。
【0037】
回生制御部30は、減速度比較部32から出力される目標減速度と実減速度との比較結果および電動機ECU17から伝達される回生トルク情報に基づき、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して回生制御の指示を与える機能である。なお、回生制御部30は、回生トルク情報に代えて回生電力情報を電動機ECU17から取得し、回生電力に比例する回生トルクを計算によって求めてもよい。
【0038】
目標減速度設定部31は、目標減速度を設定する機能である。この目標減速度は、電動機13が回生発電を行う際に、回生トルクによって生じる制動力の目標値を予め決めておくものである。このような目標減速度を設定することにより、ハイブリッドECU18は、電動機13の回生トルクによる制動力とエンジンブレーキとを併用する際のスケジューリングなどを適切に行うことができる。この目標減速度は、電動機ECU17にも伝達され、電動機ECU17は、電動機13の回生トルクによって生じる制動力が目標減速度に近付くように制御を実施する。
【0039】
減速度比較部32は、目標減速度設定部31が設定した目標減速度と、加速度センサ21の減速度情報から取得した実際のハイブリッド自動車1の減速度(これを実減速度と称する)とを比較する機能である。
【0040】
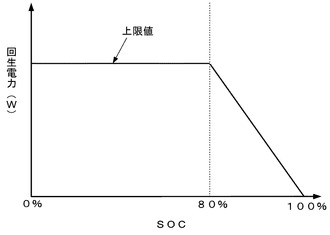
ここで、バッテリ15のSOCと回生電力との関係について、図3を参照して以下に説明する。図3は、バッテリ15のSOCと回生電力の上限値との関係を示す図であり、横軸に、SOCをとり、縦軸に、回生電力をとる。なお、目標減速度は一定値であり、たとえばエンジン10によるエンジンブレーキの制動力の50%〜70%などとして決めておく。このようなSOCに対応する目標減速度の値は、予めマップ情報などにより設定されており、たとえばハイブリッドECU18のメモリに記憶されている。
【0041】
図3に示すように、バッテリ15のSOCが0%〜80%の範囲内では、バッテリ15への回生電力の上限値はほぼ一定であるが、SOCが80%を超えると、バッテリ15の過充電を防止するために、バッテリ15への回生電力の上限値は絞られる。回生制御部30は、SOCが80%以下では、電動機13の回生トルクによって生じる制動力が予め設定されている目標減速度を達成するように制御する。一方、SOCが80%を超えると回生電力が徐々に絞られるので、これに伴って回生トルクも絞られることになる。これにより、目標減速度設定部31が設定する目標減速度に、電動機13の回生最大トルクをもってしても達しない状況が発生する。
【0042】
また、目標減速度設定部31が設定する目標減速度に、電動機13の回生最大トルクをもってしても達しない他の状況は、ハイブリッド自動車1の積載貨物が定積状態であるときに想定の範囲外の急な下り勾配路を走行する場合などに生じる。回生制御部30は、このような状況下において、以下に説明するように、回生最大トルクの不足分を補うように制御する。すなわち、回生制御部30は、電動機13の回生トルクによる減速度が目標減速度に達していない場合、運転者の操作とは無関係に、エンジンブレーキによる減速度を回生トルクによる減速度に加算して目標減速度を満足させるように制御を実施する。たとえばその上で、運転者がさらに減速度を必要とすれば、運転者は、サービスブレーキを踏む、あるいは補助ブレーキ(リターダ、排気ブレーキ、エンジンリターダなど)を動作させる。
【0043】
なお、バッテリ15のSOCが80%以下の通常の走行状態において、電動機13の回生最大トルクをもってしても目標減速度に達することができないような目標減速度を目標減速度設定部31があえて設定することは無いようになっている。ここで通常の走行状態とは、ハイブリッド自動車1の積載貨物が定積状態であり、想定の範囲内の下り勾配路(この程度は車両の性能によって様々である。)を走行している状態である。
【0044】
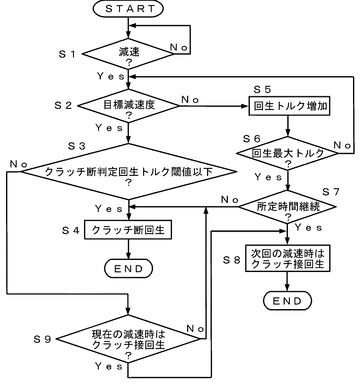
次に、図4および図5のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる、回生制御の処理(その1)を説明する。なお、図4のステップS1〜S9までのフローは1周期分の処理であり、キースイッチ20がON状態である限り処理は繰り返し実行されるものとする。また、図4に示すステップS1〜S9までのフローの処理と共に、図5に示すステップS20〜S23のフローの処理が実行されているものとする。
【0045】
図4の「START」では、キースイッチ20がON状態であり、ハイブリッドECU18がプログラムを実行し、ハイブリッドECU18に回生制御部30、目標減速度設定部31、および減速度比較部32の機能が実現されている状態であり、手続きはステップS1に進む。また、「START」時点では、後述するステップS4、ステップS8、ステップS23(図5)の手続きのいずれかが実行されているものとする。このときハイブリッド自動車1は、クラッチ断回生を実施する状態である。ただし、「START」の時点で、ステップS8の手続きが行われている場合は、「START」直後のステップS1の手続きにおいて、減速が行われていると判定されると、ハイブリッド自動車1は、クラッチ断回生からクラッチ接回生に移行する。
【0046】
ステップS1において、減速度比較部32は、加速度センサ21の減速度情報により、ハイブリッド自動車1が減速しているか否かを判定する。ステップS1において、ハイブリッド自動車1が減速していると判定されると、手続きはステップS2に進む。一方、ステップS1において、ハイブリッド自動車1が減速していないと判定されると、手続きはステップS1を繰り返す。
【0047】
ステップ2において、減速度比較部32は、目標減速度設定部31が設定した目標減速度と、加速度センサ21から取得した減速度情報に基づくハイブリッド自動車1の実減速度とを比較し、実減速度が目標減速度に達しているか否かを判定する。ステップS2において、実減速度が目標減速度に達していると判定されると、手続きはステップS3に進む。一方、ステップS2において、実減速度が目標減速度に未達であると判定されると、手続きはステップS5に進む。
【0048】
ステップS3において、回生制御部30は、電動機ECU17から伝達される回生トルク情報により、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値(請求項でいう所定値)」以下であるか否かを判定する。なお、「クラッチ断判定回生トルク閾値」については詳しく後述するが、回生最大トルクの10%〜20%ほど低い値の閾値である。ステップS3において、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値」以下であると判定されると、手続きはステップS4に進む。一方、ステップS3において、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値」を超えていると判定されると、手続きはステップS11に進む。
【0049】
ステップS4において、回生制御部30は、クラッチ12を断状態として回生を行う「クラッチ断回生」を、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して指示して1周期分の処理を終了する(END)。
【0050】
ステップS5において、回生制御部30は、インバータ14および電動機ECU17に対して回生トルクを増加させるように指示してステップS6の手続きに進む。
【0051】
ステップS6において、回生制御部30は、ステップS5で回生トルクを増加させた結果、回生トルクが回生最大トルクに達したか否かを判定する。なお、回生最大トルクとは、バッテリ15の現在のSOCに対して設定された回生電力の上限値にほぼ相当する回生電力で電動機13が回生を行った結果発生する回生トルクである。ステップS6において、回生最大トルクに達したと判定されると、手続きはステップS7に進む。一方、ステップS6において、未だ回生最大トルクに達していないと判定されると、手続きはステップS2に戻る。
【0052】
ステップS7において、回生制御部30は、ステップS6でYesとなった回生最大トルクの状態が所定時間継続したか否かを判定する。ここで所定時間とは、たとえば十数秒間(たとえば15秒間)である。ステップS7において、所定時間継続したと判定されると、手続きはステップS8に進む。一方、ステップS7において、所定時間継続していないと判定されると、手続きはステップS4に戻る。
【0053】
ステップS8において、回生制御部30は、次回の減速時にクラッチ12を接状態として回生を行う「クラッチ接回生」を、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して指示して1周期分の処理を終了する(END)。すなわち、回生制御部30は、現在の減速中に「クラッチ断回生」を実施している場合は、現在の減速中はそのまま「クラッチ断回生」を継続させ、次回の減速時に「クラッチ接回生」を実施するように制御する。
【0054】
ステップS9において、回生制御部30は、現在の減速時はクラッチ接回生であるか否かを判定する。なお、回生制御部30は、現在の減速時の状態(クラッチ接回生か否か)をハイブリッドECU18のメモリ領域の一部に記憶しているものとする。ステップS9において、現在の減速時はクラッチ接回生であると判定されると、手続きはステップS8に戻る。一方、ステップS9において、現在の減速時はクラッチ接回生でないと判定されると、手続きはステップS4に戻る。
【0055】
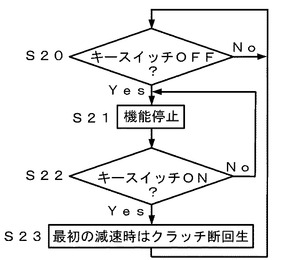
また、図5に示すように、ステップS20において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がOFF状態になったか否かを判定する。ステップS20において、キースイッチ20がOFF状態になったと判定されると、手続きはステップS21に進む。一方、ステップS20において、キースイッチ20がOFF状態になっていないと判定されると、手続きはステップS20を繰り返す。
【0056】
ステップS21において、回生制御部30は、機能を停止してステップS22の手続きに進む。
【0057】
ステップS22において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がON状態になったか否かを判定する。ステップS22において、キースイッチ20がON状態になったと判定されると、手続きはステップS23に進む。一方、ステップS22において、キースイッチ20がON状態になっていないと判定されると、手続きはステップS21に戻る。
【0058】
ステップS23において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がON状態になり、ハイブリッド自動車1が運行を開始した最初の減速時はクラッチ断回生を実施して手続きは、ステップS20に戻る。
【0059】
なお、図4のステップS7の手続きでは、ステップS6でYesとなった回生最大トルクが所定時間継続するか否かを判定することにより、ハイブリッド自動車1が、たとえば長い下り勾配路を走行中であるか否かを判定している。すなわち、ステップS6でYesとなった状態が、たとえば15秒間継続するのであれば、それはハイブリッド自動車1が長い下り勾配路を走行中であると判定できる。これにより短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。
【0060】
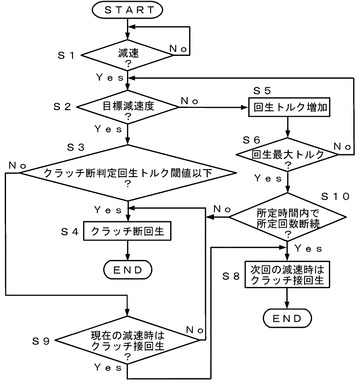
次に、図6のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる、回生制御の処理(その2)を説明する。なお、図6のフローチャートは、図4のフローチャートにおけるステップS7がステップS10に置き換わったものである。したがって、ステップS10の手続きについて説明を行い、ステップS1〜S6、S8、S9の手続きについては説明を省略する。なお、図6のフローの処理と共に、図5のフローの処理も実行されている。
【0061】
ステップS10において、回生制御部30は、ステップS6でYesとなった回生最大トルクの状態が所定時間内で所定回数断続したか否かを判定する。ここで所定時間内とは、たとえば数十秒間(たとえば30秒間)である。また、所定回数とは、例えば数回(たとえば3回)である。ステップS10において、所定時間内で所定回数断続したと判定されると、手続きはステップS8に進む。一方、ステップS10において、所定時間内に所定回数段続していないと判定されると、手続きはステップS4に戻る。
【0062】
なお、図6のステップS10の手続きでは、ステップS6でYesとなった回生最大トルクが所定時間内に所定回数断続するか否かを判定することにより、ハイブリッド自動車1が、たとえば長い下り勾配路を走行中であるか否かを判定している。すなわち、ステップS6でYesとなった状態が、たとえば30秒以内に、3回断続するのであれば、それはハイブリッド自動車1が長い下り勾配路を走行中であると判定できる。なお、ステップS6でYesとなった状態が断続する原因としては、たとえばハイブリッド自動車1が制動力不足により加速するので、運転者がサービスブレーキまたは補助ブレーキを使用し、これによりハイブリッド自動車1はいったん減速するが、運転者がサービスブレーキまたは補助ブレーキの使用をやめると再びハイブリッド自動車1は加速する、といった状態が繰り返されることが考えられる。これにより短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。
【0063】
(効果について)
本実施の形態の効果を説明するに当り、図7を参照して目標減速度に対して実減速度が不足する場合、図8を参照して回生最大トルクに対して不足回生トルクが生じている場合、図9を参照して目標減速度に実減速度が追随する場合、図10を参照して実回生トルクがクラッチ断判定回生トルク閾値以下である場合、をそれぞれ説明する。
【0064】
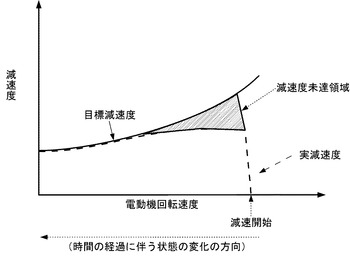
図7および図9は、横軸に、電動機回転速度をとり、縦軸に、減速度をとる。また、図8および図10は、横軸に、電動機回転速度をとり、縦軸に、回生トルクをとる。図7〜図10の状態は、ハイブリッド自動車1が減速中の状態である。したがって、図7〜図10の横軸の電動機回転速度は、時間の経過にしたがって、右(高い方)から左(低い方)へと推移する。
【0065】
図7に示すように、ハイブリッド自動車1の減速が開始されると、電動機13の回生トルクによる実減速度(破線)が目標減速度(実線)に近付くように制御が行われる。図7の例では、実減速度が目標減速度よりも低く、ハッチングで示すように、減速度未達領域が生じる。これによれば運転者は、減速度が不足している感覚を覚えることになる。また、このとき、図8に示すように、必要な回生トルクに対し、実回生トルクが不足する不足回生トルク(ハッチング部分)の領域が生じる。
【0066】
これに対し、回生制御部30は、図9に示すように、次回のハイブリッド自動車1の減速時には、電動機13の回生トルクによる減速度にエンジン10のエンジンブレーキによる減速度を併用し、実減速度(破線)が目標減速度(実線)に近付くように制御を行う。これによれば運転者は、減速度が不足している感覚を覚えることはなく、良好なドライバビリティを得ることができる。
【0067】
また、このとき、図10に示すように、電動機13の回生トルクによる制動力は、エンジン10のエンジンブレーキによる制動力に加えられており、電動機13の実回生トルクが「クラッチ断判定回生トルク閾値(一点鎖線)」以下である。これによれば図4、図6のフローチャートのステップS3のYesのように、クラッチ断回生が可能な状態である。なお、「クラッチ断判定回生トルク閾値」は、回生最大トルクよりも10%〜20%ほど低い値に設定されている。仮に、「クラッチ断判定回生トルク閾値」を、回生最大トルクと同じにすると、クラッチ接回生とクラッチ断回生とが頻繁に切り換えられる状態(これをモードハンチングと称する)が生じる可能性があるが、「クラッチ断判定回生トルク閾値」を、回生最大トルクよりも10%〜20%ほど低い値に設定することにより、このようなモードハンチングの発生を抑えることができる。クラッチ断回生からクラッチ接回生へと切り換えられる際には、エンジン10と電動機13との間で回転速度の同期が行われ、エンジン10がアイドル状態よりも高い回転速度になり燃料が消費されるので、燃費向上の観点からみてモードハンチングの発生は好ましくない。
【0068】
さらに、回生制御部30は、クラッチ12を接状態にするタイミングが減速途中にならないように制御する(ステップS8)ので、運転者は、クラッチ12が接続されることによる急制動のショックを感じることがない。
【0069】
また、図4のフローチャートのステップS7および図6のフローチャートのステップS10の手続きによれば、既に説明したように、短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。これによってもクラッチ12が接続される回数を減らし、ハイブリッド自動車1の燃料消費量を低く抑えて燃費を向上させることができる。
【0070】
また、図5のフローチャートのステップS20〜S23の手続きによれば、ハイブリッド自動車1の運行開始時から初回の減速時には、必ず電動機13のみによる減速を行い、クラッチ12を断状態として回生トルクによる減速を実施する。これにより、減速時には、なるべくクラッチ12を接続する機会を減らすように制御できるため、ハイブリッド自動車1の燃料消費量を低く抑えて燃費を向上させることができる。
【0071】
また、エンジン10が補機(冷凍機のコンプレッサなど)の動力源である場合、長い下り勾配路でクラッチ12を接続すれば、エンジン10の燃料噴射を遮断し、燃料を節約しつつ安定した補機の動力源を得ることができる。この場合も、短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わるような状態であると、補機の動力源としてはエンジン10の回転速度が不安定になり不適当である。このような不適当な状態を回避するためにも図4のフローチャートのステップS7および図6のフローチャートのステップS10の手続きは有効である。
【0072】
(その他の実施の形態)
図4、図6のフローチャートにおけるステップS4は、ステップS3でYesになると直ちに「クラッチ断回生」を実施するようになっている。これに対し、ステップS4を、「次回からクラッチ断回生」とし、ステップS3でYesになってからハイブリッド自動車1が次回の減速時にクラッチ断回生を実施するように制御してもよい。これによれば、クラッチ12がハイブリッド自動車1の減速途中に断状態とならないため、運転者がショックを感じることを無くすことができる。なお、減速途中にクラッチ12が断状態になっても電動機13の回生トルクによる制動力は充分足りており、運転者が感じるショックは、ごく小さいものである。よって、通常は、ステップS4を、「次回からクラッチ断回生」とする必要性は低い。
【0073】
また、図4、図6のフローチャートの説明において、「以下」は、「未満」とし、「超える」は、「以上」とするなど、判定の境界値については様々に変更してもよい。
【0074】
エンジン10は、内燃機関であると説明したが、外燃機関を含む熱機関であってもよい。
【0075】
また、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18にあらかじめインストールされると説明したが、プログラムが記録されている(プログラムを記憶している)リムーバブルメディアを図示せぬドライブなどに装着し、リムーバブルメディアから読み出したプログラムをハイブリッドECU18の内部の不揮発性のメモリに記憶することにより、または、有線または無線の伝送媒体を介して送信されてきたプログラムを、図示せぬ通信部で受信し、ハイブリッドECU18の内部の不揮発性のメモリに記憶することで、コンピュータであるハイブリッドECU18にインストールすることができる。
【0076】
また、各ECUは、これらを1つにまとめたECUにより実現してもよいし、あるいは、各ECUの機能をさらに細分化したECUを新たに設けてもよい。
【0077】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであってもよいし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであってもよい。
【0078】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0079】
1…ハイブリッド自動車、10…エンジン、11…エンジンECU、12…クラッチ、13…電動機、14…インバータ、15…バッテリ、16…トランスミッション、17…電動機ECU、18…ハイブリッドECU、19…車輪、20…キースイッチ、21…加速度センサ、30…回生制御部(制御手段)、31…目標減速度設定部(制御手段の一部)、32…減速度比較部(第一の比較手段、第二の比較手段)
【技術分野】
【0001】
本発明は、回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラムに関する。
【背景技術】
【0002】
ハイブリッド自動車は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、減速中は、電動機により回生発電が可能である。回生発電を行う際には、電動機に回生トルクが発生する。この回生トルクは、ハイブリッド自動車の走行におけるフリクションとなりエンジンブレーキと同様に制動力になる(たとえば特許文献1参照)。なお、電動機の回生トルクは、電動機の回生電力に比例する。すなわち電動機の回生電力が多いほど電動機の回生トルクも大きい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−223421号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、ハイブリッド自動車における電動機の回生トルクは、エンジンブレーキと同様に、制動力になる。しかしながら、ハイブリッド自動車の積載貨物の重量、またはハイブリッド自動車が走行中の路面の下り勾配の状態などによって、電動機の回生トルクをハイブリッド自動車の制動力として利用する場合、制動力が不足することがある。このような状態では、運転者が要求する制動力を満足させられない場合があり、運転者は、制動力不足を感じ、ドライバビリティの悪化を招く場合がある。
【0005】
本発明は、このような背景の下に行われたものであって、電動機の回生トルクを制動力として利用する際のドライバビリティを向上させることができる回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の1つの観点は、回生制御装置としての観点である。本発明の回生制御装置は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であると共に、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御装置において、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する第一の比較手段と、電動機が最大の回生トルクを発生しているにも係わらず第一の比較手段の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する制御手段と、を有するものである。
【0007】
たとえば、所定のパターンは、上述した状態が所定の時間継続するパターンである。あるいは、所定のパターンは、上述した状態が所定の時間継続する状態が所定回数繰り返されるパターンである。
【0008】
さらに、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する際に、目標減速度とエンジンのエンジンブレーキおよび電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較手段を有し、制御手段は、第二の比較手段の比較結果により実減速度が目標減速度に達しており、このときの電動機の回生トルクが所定値以下であるときには、電動機のみによる走行形態とし、電動機の回生トルクを制動力として利用するように制御することができる。
【0009】
さらに、制御手段は、ハイブリッド自動車の始動時から最初の減速時には、電動機のみによる減速を実施し、電動機の回生発電により生じる回生トルクを制動力として利用することができる。
【0010】
本発明の他の観点は、ハイブリッド自動車としての観点である。本発明のハイブリッド自動車は、本発明の回生制御装置を有するものである。
【0011】
本発明のさらに他の観点は、回生制御方法としての観点である。本発明の回生制御方法は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であると共に、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御方法において、電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する第一の比較ステップと、電動機が最大の回生トルクを発生しているにも係わらず第一の比較ステップの比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用するステップと、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する際に、目標減速度とエンジンのエンジンブレーキおよび電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較ステップと、第二の比較ステップの比較結果により実減速度が目標減速度に達しており、このときの電動機の回生トルクが所定値以下であるときには、電動機のみによる走行形態とし、電動機の回生トルクを制動力として利用するステップと、を有するものである。
【0012】
本発明のさらに他の観点は、プログラムとしての観点である。本発明のプログラムは、情報処理装置に、本発明の回生制御装置の機能を実現させるものである。
【発明の効果】
【0013】
本発明によれば、電動機の回生トルクを制動力として利用する際のドライバビリティを向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図2】図1のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図3】バッテリのSOC(State of Charge)と電動機の回生電力の上限値との関係を示す図である。
【図4】図2の回生制御部の処理(その1)を示すフローチャートである。
【図5】図2の回生制御部の処理でキースイッチのON/OFFに係わる処理を示すフローチャートである。
【図6】図2の回生制御部の処理(その2)を示すフローチャートである。
【図7】図2の回生制御部の回生制御における減速度と電動機回転速度との関係を示す図であり、目標減速度に対して実減速度が不足する場合を示す図である。
【図8】図2の回生制御部の回生制御における回生トルクと電動機回転速度との関係を示す図であり、回生最大トルクに対して不足回生トルクが生じている場合を示す図である。
【図9】図2の回生制御部の回生制御における減速度と電動機回転速度との関係を示す図であり、目標減速度に実減速度が追随する場合を示す図である。
【図10】図2の回生制御部の回生制御における回生トルクと電動機回転速度との関係を示す図であり、実回生トルクがクラッチ断判定回生トルク閾値以下である場合を示す図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態のハイブリッド自動車について、図1〜図10を参照しながら説明する。
【0016】
図1は、ハイブリッド自動車1の構成の例を示すブロック図である。ハイブリッド自動車1は、車両の一例である。ハイブリッド自動車1は、半自動トランスミッションの変速機を介したエンジン(内燃機関)10および/または電動機13によって駆動され、減速時には、電動機13の回生トルクによってエンジン10のエンジンブレーキのような制動力を発生させることができる。なお、半自動トランスミッションとは、マニュアルトランスミッションと同じ構成を有しながら変速操作を自動的に行うことができるトランスミッションである。
【0017】
ハイブリッド自動車1は、エンジン10、エンジンECU(Electronic Control Unit)11、クラッチ12、電動機13、インバータ14、バッテリ15、トランスミッション16、電動機ECU17、ハイブリッドECU18、車輪19、キースイッチ20、加速度センサ21、およびシフト部22を有して構成される。なお、トランスミッション16は、上述した半自動トランスミッションを有し、ドライブレンジ(以下では、D(Drive)レンジと記す)を有するシフト部22により操作される。シフト部22がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0018】
エンジン10は、内燃機関の一例であり、エンジンECU11によって制御され、ガソリン、軽油、CNG(Compressed Natural Gas)、LPG(Liquefied Petroleum Gas)、または代替燃料等を内部で燃焼させて、軸を回転させる動力を発生させ、発生した動力をクラッチ12に伝達する。
【0019】
エンジンECU11は、ハイブリッドECU18からの指示に従うことにより、電動機ECU17と連携動作するコンピュータであり、燃料噴射量やバルブタイミングなど、エンジン10を制御する。たとえば、エンジンECU11は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、マイクロプロセッサ(マイクロコンピュータ)、DSP(Digital Signal Processor)などにより構成され、内部に、演算部、メモリ、およびI/O(Input/Output)ポートなどを有する。
【0020】
クラッチ12は、ハイブリッドECU18によって制御され、エンジン10からの軸出力を、電動機13およびトランスミッション16を介して車輪19に伝達する。すなわち、クラッチ12は、ハイブリッドECU18の制御によって、エンジン10の回転軸と電動機13の回転軸とを機械的に接続することにより、エンジン10の軸出力を電動機13に伝達させたり、または、エンジン10の回転軸と電動機13の回転軸との機械的な接続を切断することにより、エンジン10の軸と、電動機13の回転軸とが互いに異なる回転速度で回転できるようにする。
【0021】
たとえば、クラッチ12は、エンジン10の動力によってハイブリッド自動車1が走行し、これにより電動機13に発電させる場合、電動機13の駆動力によってエンジン10がアシストされる場合、および電動機13によってエンジン10を始動させる場合などに、エンジン10の回転軸と電動機13の回転軸とを機械的に接続する。
【0022】
また、たとえば、クラッチ12は、エンジン10が停止またはアイドリング状態にあり、電動機13の駆動力によってハイブリッド自動車1が走行している場合、およびエンジン10が停止またはアイドリング状態にあり、ハイブリッド自動車1が減速中または下り坂を走行中であり、電動機13が発電している(電力回生している)場合、エンジン10の回転軸と電動機13の回転軸との機械的な接続を切断する。
【0023】
なお、クラッチ12は、運転者がクラッチペダルを操作して動作しているクラッチとは異なるものであり、ハイブリッドECU18の制御によって動作する。
【0024】
電動機13は、いわゆる、モータジェネレータであり、インバータ14から供給された電力により、軸を回転させる動力を発生させて、その軸出力をトランスミッション16に供給するか、またはトランスミッション16から供給された軸を回転させる動力によって発電し、その電力をインバータ14に供給する。たとえば、ハイブリッド自動車1が加速しているとき、または定速で走行しているときにおいて、電動機13は、軸を回転させる動力を発生させて、その軸出力をトランスミッション16に供給し、エンジン10と協働してハイブリッド自動車1を走行させる。また、たとえば、電動機13がエンジン10によって駆動されているとき、またはハイブリッド自動車1が減速しているとき、もしくは下り坂を走行しているときなどにおいて、電動機13は、発電機として動作し、この場合、トランスミッション16から供給された軸を回転させる動力によって発電して、電力をインバータ14に供給し、バッテリ15が充電される。前述したように、電動機13が発電している状態は、ハイブリッド自動車1が「バッテリ15への回生」を行っている状態であり、電動機13は、回生電力に応じた大きさの回生トルクを発生する。
【0025】
インバータ14は、電動機ECU17によって制御され、バッテリ15からの直流電圧を交流電圧に変換するか、または電動機13からの交流電圧を直流電圧に変換する。電動機13が動力を発生させる場合、インバータ14は、バッテリ15の直流電圧を交流電圧に変換して、電動機13に電力を供給する。電動機13が発電する場合、インバータ14は、電動機13からの交流電圧を直流電圧に変換する。すなわち、この場合、インバータ14は、バッテリ15に直流電圧を供給するための整流器および電圧調整装置としての役割を果たす。
【0026】
バッテリ15は、充放電可能な二次電池であり、電動機13が動力を発生させるとき、電動機13にインバータ14を介して電力を供給するか、または電動機13が発電しているとき、電動機13が発電する電力によって充電される。バッテリ15には、適切な充電状態(以下では、SOC(State of Charge)と称する)の範囲が決められており、SOCがその範囲を外れないように管理されている。
【0027】
トランスミッション16は、ハイブリッドECU18からの変速指示信号に従って、複数のギア比(変速比)のいずれかを選択する半自動トランスミッション(図示せず)を有し、変速比を切り換えて、変速されたエンジン10の動力および/または電動機13の動力を車輪19に伝達する。また、減速しているとき、もしくは下り坂を走行しているときなど、トランスミッション16は、車輪19からの動力を電動機13に伝達する。なお、半自動トランスミッションは、運転者がシフト部22を操作して手動で任意のギア段にギア位置を変更することもできる。
【0028】
電動機ECU17は、ハイブリッドECU18からの指示に従うことにより、エンジンECU11と連携動作するコンピュータであり、インバータ14を制御することによって電動機13を制御する。たとえば、電動機ECU17は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0029】
ハイブリッドECU18は、コンピュータの一例であり、ハイブリッド走行のために、アクセル開度情報、ブレーキ操作情報、車速情報、トランスミッション16から取得したギア位置情報、エンジンECU11から取得したエンジン回転速度情報、およびバッテリ15から取得したSOC情報に基づいて、クラッチ12を制御すると共に、変速指示信号を供給することでトランスミッション16を制御し、電動機ECU17に対して電動機13およびインバータ14の制御指示を与え、エンジンECU11に対してエンジン10の制御指示を与える。これらの制御指示には、後述する回生制御指示も含まれる。たとえば、ハイブリッドECU18は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0030】
なお、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18の内部の不揮発性のメモリにあらかじめ記憶しておくことで、コンピュータであるハイブリッドECU18にあらかじめインストールしておくことができる。
【0031】
エンジンECU11、電動機ECU17、およびハイブリッドECU18は、CAN(Control Area Network)などの規格に準拠したバスなどにより相互に接続されている。
【0032】
車輪19は、路面に駆動力を伝達する駆動輪である。なお、図1において、1つの車輪19のみが図示されているが、実際には、ハイブリッド自動車1は、複数の車輪19を有する。
【0033】
キースイッチ20は、運転を開始するときにユーザにより、たとえばキーが差し込まれてON/OFFされるスイッチであり、これがON状態になることによってハイブリッド自動車1の各部は起動し、キースイッチ20がOFF状態になることによってハイブリッド自動車1の各部は停止する。
【0034】
加速度センサ21は、ハイブリッド自動車1の加速度を感知してハイブリッドECU18に加速度情報として伝達するものである。しかしながら、本実施の形態では、ハイブリッドECU18は、加速度センサ21によって、ハイブリッド自動車1の減速度情報を取得しているので、図1では、加速度センサ21からハイブリッドECU18に対して、減速度情報が伝達されているとして図示してある。
【0035】
シフト部22は、既に説明したように、トランスミッション16の半自動トランスミッションに運転者からの指示を与えるものであり、シフト部22がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0036】
図2は、プログラムを実行するハイブリッドECU18において実現される機能の構成の例を示すブロック図である。すなわち、ハイブリッドECU18がプログラムを実行すると、回生制御部30、目標減速度設定部31、および減速度比較部32の機能が実現される。
【0037】
回生制御部30は、減速度比較部32から出力される目標減速度と実減速度との比較結果および電動機ECU17から伝達される回生トルク情報に基づき、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して回生制御の指示を与える機能である。なお、回生制御部30は、回生トルク情報に代えて回生電力情報を電動機ECU17から取得し、回生電力に比例する回生トルクを計算によって求めてもよい。
【0038】
目標減速度設定部31は、目標減速度を設定する機能である。この目標減速度は、電動機13が回生発電を行う際に、回生トルクによって生じる制動力の目標値を予め決めておくものである。このような目標減速度を設定することにより、ハイブリッドECU18は、電動機13の回生トルクによる制動力とエンジンブレーキとを併用する際のスケジューリングなどを適切に行うことができる。この目標減速度は、電動機ECU17にも伝達され、電動機ECU17は、電動機13の回生トルクによって生じる制動力が目標減速度に近付くように制御を実施する。
【0039】
減速度比較部32は、目標減速度設定部31が設定した目標減速度と、加速度センサ21の減速度情報から取得した実際のハイブリッド自動車1の減速度(これを実減速度と称する)とを比較する機能である。
【0040】
ここで、バッテリ15のSOCと回生電力との関係について、図3を参照して以下に説明する。図3は、バッテリ15のSOCと回生電力の上限値との関係を示す図であり、横軸に、SOCをとり、縦軸に、回生電力をとる。なお、目標減速度は一定値であり、たとえばエンジン10によるエンジンブレーキの制動力の50%〜70%などとして決めておく。このようなSOCに対応する目標減速度の値は、予めマップ情報などにより設定されており、たとえばハイブリッドECU18のメモリに記憶されている。
【0041】
図3に示すように、バッテリ15のSOCが0%〜80%の範囲内では、バッテリ15への回生電力の上限値はほぼ一定であるが、SOCが80%を超えると、バッテリ15の過充電を防止するために、バッテリ15への回生電力の上限値は絞られる。回生制御部30は、SOCが80%以下では、電動機13の回生トルクによって生じる制動力が予め設定されている目標減速度を達成するように制御する。一方、SOCが80%を超えると回生電力が徐々に絞られるので、これに伴って回生トルクも絞られることになる。これにより、目標減速度設定部31が設定する目標減速度に、電動機13の回生最大トルクをもってしても達しない状況が発生する。
【0042】
また、目標減速度設定部31が設定する目標減速度に、電動機13の回生最大トルクをもってしても達しない他の状況は、ハイブリッド自動車1の積載貨物が定積状態であるときに想定の範囲外の急な下り勾配路を走行する場合などに生じる。回生制御部30は、このような状況下において、以下に説明するように、回生最大トルクの不足分を補うように制御する。すなわち、回生制御部30は、電動機13の回生トルクによる減速度が目標減速度に達していない場合、運転者の操作とは無関係に、エンジンブレーキによる減速度を回生トルクによる減速度に加算して目標減速度を満足させるように制御を実施する。たとえばその上で、運転者がさらに減速度を必要とすれば、運転者は、サービスブレーキを踏む、あるいは補助ブレーキ(リターダ、排気ブレーキ、エンジンリターダなど)を動作させる。
【0043】
なお、バッテリ15のSOCが80%以下の通常の走行状態において、電動機13の回生最大トルクをもってしても目標減速度に達することができないような目標減速度を目標減速度設定部31があえて設定することは無いようになっている。ここで通常の走行状態とは、ハイブリッド自動車1の積載貨物が定積状態であり、想定の範囲内の下り勾配路(この程度は車両の性能によって様々である。)を走行している状態である。
【0044】
次に、図4および図5のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる、回生制御の処理(その1)を説明する。なお、図4のステップS1〜S9までのフローは1周期分の処理であり、キースイッチ20がON状態である限り処理は繰り返し実行されるものとする。また、図4に示すステップS1〜S9までのフローの処理と共に、図5に示すステップS20〜S23のフローの処理が実行されているものとする。
【0045】
図4の「START」では、キースイッチ20がON状態であり、ハイブリッドECU18がプログラムを実行し、ハイブリッドECU18に回生制御部30、目標減速度設定部31、および減速度比較部32の機能が実現されている状態であり、手続きはステップS1に進む。また、「START」時点では、後述するステップS4、ステップS8、ステップS23(図5)の手続きのいずれかが実行されているものとする。このときハイブリッド自動車1は、クラッチ断回生を実施する状態である。ただし、「START」の時点で、ステップS8の手続きが行われている場合は、「START」直後のステップS1の手続きにおいて、減速が行われていると判定されると、ハイブリッド自動車1は、クラッチ断回生からクラッチ接回生に移行する。
【0046】
ステップS1において、減速度比較部32は、加速度センサ21の減速度情報により、ハイブリッド自動車1が減速しているか否かを判定する。ステップS1において、ハイブリッド自動車1が減速していると判定されると、手続きはステップS2に進む。一方、ステップS1において、ハイブリッド自動車1が減速していないと判定されると、手続きはステップS1を繰り返す。
【0047】
ステップ2において、減速度比較部32は、目標減速度設定部31が設定した目標減速度と、加速度センサ21から取得した減速度情報に基づくハイブリッド自動車1の実減速度とを比較し、実減速度が目標減速度に達しているか否かを判定する。ステップS2において、実減速度が目標減速度に達していると判定されると、手続きはステップS3に進む。一方、ステップS2において、実減速度が目標減速度に未達であると判定されると、手続きはステップS5に進む。
【0048】
ステップS3において、回生制御部30は、電動機ECU17から伝達される回生トルク情報により、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値(請求項でいう所定値)」以下であるか否かを判定する。なお、「クラッチ断判定回生トルク閾値」については詳しく後述するが、回生最大トルクの10%〜20%ほど低い値の閾値である。ステップS3において、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値」以下であると判定されると、手続きはステップS4に進む。一方、ステップS3において、現在の電動機13の回生トルクが「クラッチ断判定回生トルク閾値」を超えていると判定されると、手続きはステップS11に進む。
【0049】
ステップS4において、回生制御部30は、クラッチ12を断状態として回生を行う「クラッチ断回生」を、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して指示して1周期分の処理を終了する(END)。
【0050】
ステップS5において、回生制御部30は、インバータ14および電動機ECU17に対して回生トルクを増加させるように指示してステップS6の手続きに進む。
【0051】
ステップS6において、回生制御部30は、ステップS5で回生トルクを増加させた結果、回生トルクが回生最大トルクに達したか否かを判定する。なお、回生最大トルクとは、バッテリ15の現在のSOCに対して設定された回生電力の上限値にほぼ相当する回生電力で電動機13が回生を行った結果発生する回生トルクである。ステップS6において、回生最大トルクに達したと判定されると、手続きはステップS7に進む。一方、ステップS6において、未だ回生最大トルクに達していないと判定されると、手続きはステップS2に戻る。
【0052】
ステップS7において、回生制御部30は、ステップS6でYesとなった回生最大トルクの状態が所定時間継続したか否かを判定する。ここで所定時間とは、たとえば十数秒間(たとえば15秒間)である。ステップS7において、所定時間継続したと判定されると、手続きはステップS8に進む。一方、ステップS7において、所定時間継続していないと判定されると、手続きはステップS4に戻る。
【0053】
ステップS8において、回生制御部30は、次回の減速時にクラッチ12を接状態として回生を行う「クラッチ接回生」を、エンジンECU11、クラッチ12、インバータ14、および電動機ECU17に対して指示して1周期分の処理を終了する(END)。すなわち、回生制御部30は、現在の減速中に「クラッチ断回生」を実施している場合は、現在の減速中はそのまま「クラッチ断回生」を継続させ、次回の減速時に「クラッチ接回生」を実施するように制御する。
【0054】
ステップS9において、回生制御部30は、現在の減速時はクラッチ接回生であるか否かを判定する。なお、回生制御部30は、現在の減速時の状態(クラッチ接回生か否か)をハイブリッドECU18のメモリ領域の一部に記憶しているものとする。ステップS9において、現在の減速時はクラッチ接回生であると判定されると、手続きはステップS8に戻る。一方、ステップS9において、現在の減速時はクラッチ接回生でないと判定されると、手続きはステップS4に戻る。
【0055】
また、図5に示すように、ステップS20において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がOFF状態になったか否かを判定する。ステップS20において、キースイッチ20がOFF状態になったと判定されると、手続きはステップS21に進む。一方、ステップS20において、キースイッチ20がOFF状態になっていないと判定されると、手続きはステップS20を繰り返す。
【0056】
ステップS21において、回生制御部30は、機能を停止してステップS22の手続きに進む。
【0057】
ステップS22において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がON状態になったか否かを判定する。ステップS22において、キースイッチ20がON状態になったと判定されると、手続きはステップS23に進む。一方、ステップS22において、キースイッチ20がON状態になっていないと判定されると、手続きはステップS21に戻る。
【0058】
ステップS23において、回生制御部30は、ハイブリッド自動車1のキースイッチ20がON状態になり、ハイブリッド自動車1が運行を開始した最初の減速時はクラッチ断回生を実施して手続きは、ステップS20に戻る。
【0059】
なお、図4のステップS7の手続きでは、ステップS6でYesとなった回生最大トルクが所定時間継続するか否かを判定することにより、ハイブリッド自動車1が、たとえば長い下り勾配路を走行中であるか否かを判定している。すなわち、ステップS6でYesとなった状態が、たとえば15秒間継続するのであれば、それはハイブリッド自動車1が長い下り勾配路を走行中であると判定できる。これにより短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。
【0060】
次に、図6のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる、回生制御の処理(その2)を説明する。なお、図6のフローチャートは、図4のフローチャートにおけるステップS7がステップS10に置き換わったものである。したがって、ステップS10の手続きについて説明を行い、ステップS1〜S6、S8、S9の手続きについては説明を省略する。なお、図6のフローの処理と共に、図5のフローの処理も実行されている。
【0061】
ステップS10において、回生制御部30は、ステップS6でYesとなった回生最大トルクの状態が所定時間内で所定回数断続したか否かを判定する。ここで所定時間内とは、たとえば数十秒間(たとえば30秒間)である。また、所定回数とは、例えば数回(たとえば3回)である。ステップS10において、所定時間内で所定回数断続したと判定されると、手続きはステップS8に進む。一方、ステップS10において、所定時間内に所定回数段続していないと判定されると、手続きはステップS4に戻る。
【0062】
なお、図6のステップS10の手続きでは、ステップS6でYesとなった回生最大トルクが所定時間内に所定回数断続するか否かを判定することにより、ハイブリッド自動車1が、たとえば長い下り勾配路を走行中であるか否かを判定している。すなわち、ステップS6でYesとなった状態が、たとえば30秒以内に、3回断続するのであれば、それはハイブリッド自動車1が長い下り勾配路を走行中であると判定できる。なお、ステップS6でYesとなった状態が断続する原因としては、たとえばハイブリッド自動車1が制動力不足により加速するので、運転者がサービスブレーキまたは補助ブレーキを使用し、これによりハイブリッド自動車1はいったん減速するが、運転者がサービスブレーキまたは補助ブレーキの使用をやめると再びハイブリッド自動車1は加速する、といった状態が繰り返されることが考えられる。これにより短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。
【0063】
(効果について)
本実施の形態の効果を説明するに当り、図7を参照して目標減速度に対して実減速度が不足する場合、図8を参照して回生最大トルクに対して不足回生トルクが生じている場合、図9を参照して目標減速度に実減速度が追随する場合、図10を参照して実回生トルクがクラッチ断判定回生トルク閾値以下である場合、をそれぞれ説明する。
【0064】
図7および図9は、横軸に、電動機回転速度をとり、縦軸に、減速度をとる。また、図8および図10は、横軸に、電動機回転速度をとり、縦軸に、回生トルクをとる。図7〜図10の状態は、ハイブリッド自動車1が減速中の状態である。したがって、図7〜図10の横軸の電動機回転速度は、時間の経過にしたがって、右(高い方)から左(低い方)へと推移する。
【0065】
図7に示すように、ハイブリッド自動車1の減速が開始されると、電動機13の回生トルクによる実減速度(破線)が目標減速度(実線)に近付くように制御が行われる。図7の例では、実減速度が目標減速度よりも低く、ハッチングで示すように、減速度未達領域が生じる。これによれば運転者は、減速度が不足している感覚を覚えることになる。また、このとき、図8に示すように、必要な回生トルクに対し、実回生トルクが不足する不足回生トルク(ハッチング部分)の領域が生じる。
【0066】
これに対し、回生制御部30は、図9に示すように、次回のハイブリッド自動車1の減速時には、電動機13の回生トルクによる減速度にエンジン10のエンジンブレーキによる減速度を併用し、実減速度(破線)が目標減速度(実線)に近付くように制御を行う。これによれば運転者は、減速度が不足している感覚を覚えることはなく、良好なドライバビリティを得ることができる。
【0067】
また、このとき、図10に示すように、電動機13の回生トルクによる制動力は、エンジン10のエンジンブレーキによる制動力に加えられており、電動機13の実回生トルクが「クラッチ断判定回生トルク閾値(一点鎖線)」以下である。これによれば図4、図6のフローチャートのステップS3のYesのように、クラッチ断回生が可能な状態である。なお、「クラッチ断判定回生トルク閾値」は、回生最大トルクよりも10%〜20%ほど低い値に設定されている。仮に、「クラッチ断判定回生トルク閾値」を、回生最大トルクと同じにすると、クラッチ接回生とクラッチ断回生とが頻繁に切り換えられる状態(これをモードハンチングと称する)が生じる可能性があるが、「クラッチ断判定回生トルク閾値」を、回生最大トルクよりも10%〜20%ほど低い値に設定することにより、このようなモードハンチングの発生を抑えることができる。クラッチ断回生からクラッチ接回生へと切り換えられる際には、エンジン10と電動機13との間で回転速度の同期が行われ、エンジン10がアイドル状態よりも高い回転速度になり燃料が消費されるので、燃費向上の観点からみてモードハンチングの発生は好ましくない。
【0068】
さらに、回生制御部30は、クラッチ12を接状態にするタイミングが減速途中にならないように制御する(ステップS8)ので、運転者は、クラッチ12が接続されることによる急制動のショックを感じることがない。
【0069】
また、図4のフローチャートのステップS7および図6のフローチャートのステップS10の手続きによれば、既に説明したように、短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わることを回避できる。これによってもクラッチ12が接続される回数を減らし、ハイブリッド自動車1の燃料消費量を低く抑えて燃費を向上させることができる。
【0070】
また、図5のフローチャートのステップS20〜S23の手続きによれば、ハイブリッド自動車1の運行開始時から初回の減速時には、必ず電動機13のみによる減速を行い、クラッチ12を断状態として回生トルクによる減速を実施する。これにより、減速時には、なるべくクラッチ12を接続する機会を減らすように制御できるため、ハイブリッド自動車1の燃料消費量を低く抑えて燃費を向上させることができる。
【0071】
また、エンジン10が補機(冷凍機のコンプレッサなど)の動力源である場合、長い下り勾配路でクラッチ12を接続すれば、エンジン10の燃料噴射を遮断し、燃料を節約しつつ安定した補機の動力源を得ることができる。この場合も、短い下り勾配路が断続するような路面環境において、クラッチ断回生とクラッチ接回生とが頻繁に切り換わるような状態であると、補機の動力源としてはエンジン10の回転速度が不安定になり不適当である。このような不適当な状態を回避するためにも図4のフローチャートのステップS7および図6のフローチャートのステップS10の手続きは有効である。
【0072】
(その他の実施の形態)
図4、図6のフローチャートにおけるステップS4は、ステップS3でYesになると直ちに「クラッチ断回生」を実施するようになっている。これに対し、ステップS4を、「次回からクラッチ断回生」とし、ステップS3でYesになってからハイブリッド自動車1が次回の減速時にクラッチ断回生を実施するように制御してもよい。これによれば、クラッチ12がハイブリッド自動車1の減速途中に断状態とならないため、運転者がショックを感じることを無くすことができる。なお、減速途中にクラッチ12が断状態になっても電動機13の回生トルクによる制動力は充分足りており、運転者が感じるショックは、ごく小さいものである。よって、通常は、ステップS4を、「次回からクラッチ断回生」とする必要性は低い。
【0073】
また、図4、図6のフローチャートの説明において、「以下」は、「未満」とし、「超える」は、「以上」とするなど、判定の境界値については様々に変更してもよい。
【0074】
エンジン10は、内燃機関であると説明したが、外燃機関を含む熱機関であってもよい。
【0075】
また、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18にあらかじめインストールされると説明したが、プログラムが記録されている(プログラムを記憶している)リムーバブルメディアを図示せぬドライブなどに装着し、リムーバブルメディアから読み出したプログラムをハイブリッドECU18の内部の不揮発性のメモリに記憶することにより、または、有線または無線の伝送媒体を介して送信されてきたプログラムを、図示せぬ通信部で受信し、ハイブリッドECU18の内部の不揮発性のメモリに記憶することで、コンピュータであるハイブリッドECU18にインストールすることができる。
【0076】
また、各ECUは、これらを1つにまとめたECUにより実現してもよいし、あるいは、各ECUの機能をさらに細分化したECUを新たに設けてもよい。
【0077】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであってもよいし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであってもよい。
【0078】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0079】
1…ハイブリッド自動車、10…エンジン、11…エンジンECU、12…クラッチ、13…電動機、14…インバータ、15…バッテリ、16…トランスミッション、17…電動機ECU、18…ハイブリッドECU、19…車輪、20…キースイッチ、21…加速度センサ、30…回生制御部(制御手段)、31…目標減速度設定部(制御手段の一部)、32…減速度比較部(第一の比較手段、第二の比較手段)
【特許請求の範囲】
【請求項1】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であると共に、前記電動機のみによる走行中に前記電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御装置において、
前記電動機のみによる走行中の減速時に前記電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と前記回生発電により生じる回生トルクによる実減速度とを比較する第一の比較手段と、
前記電動機が最大の回生トルクを発生しているにも係わらず前記第一の比較手段の比較結果により前記実減速度が前記目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、前記エンジンと前記電動機とが協働する走行形態とし、前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する制御手段と、
を有する、
ことを特徴とする回生制御装置。
【請求項2】
請求項1記載の回生制御装置であって、
前記所定のパターンは、前記状態が所定の時間継続するパターンである、
ことを特徴とする回生制御装置。
【請求項3】
請求項1記載の回生制御装置であって、
前記所定のパターンは、前記状態が所定の時間継続する状態が所定回数繰り返されるパターンである、
ことを特徴とする回生制御装置。
【請求項4】
請求項1から3のいずれか1項記載の回生制御装置であって、
前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する際に、前記目標減速度と前記エンジンのエンジンブレーキおよび前記電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較手段を有し、
前記制御手段は、前記第二の比較手段の比較結果により実減速度が目標減速度に達しており、このときの前記電動機の回生トルクが所定値以下であるときには、前記電動機のみによる走行形態とし、前記電動機の回生トルクを制動力として利用する、
ことを特徴とする回生制御装置。
【請求項5】
請求項1から4のいずれか1項記載の回生制御装置であって、
前記制御手段は、前記ハイブリッド自動車の始動時から最初の減速時には、前記電動機のみによる減速を実施し、前記電動機の回生発電により生じる回生トルクを制動力として利用する、
ことを特徴とする回生制御装置。
【請求項6】
請求項1から5のいずれか1項記載の回生制御装置を有することを特徴とするハイブリッド自動車。
【請求項7】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であると共に、前記電動機のみによる走行中に前記電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御方法において、
前記電動機のみによる走行中の減速時に前記電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と前記回生発電により生じる回生トルクによる実減速度とを比較する第一の比較ステップと、
前記電動機が最大の回生トルクを発生しているにも係わらず前記第一の比較ステップの比較結果により前記実減速度が前記目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、前記エンジンと前記電動機とが協働する走行形態とし、前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用するステップと、
前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する際に、前記目標減速度と前記エンジンのエンジンブレーキおよび前記電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較ステップと、
前記第二の比較ステップの比較結果により実減速度が目標減速度に達しており、このときの前記電動機の回生トルクが所定値以下であるときには、前記電動機のみによる走行形態とし、前記電動機の回生トルクを制動力として利用するステップと、
を有する、
ことを特徴とする回生制御方法。
【請求項8】
情報処理装置に、請求項1から6のいずれか1項記載の回生制御装置の機能を実現させることを特徴とするプログラム。
【請求項1】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であると共に、前記電動機のみによる走行中に前記電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御装置において、
前記電動機のみによる走行中の減速時に前記電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と前記回生発電により生じる回生トルクによる実減速度とを比較する第一の比較手段と、
前記電動機が最大の回生トルクを発生しているにも係わらず前記第一の比較手段の比較結果により前記実減速度が前記目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、前記エンジンと前記電動機とが協働する走行形態とし、前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する制御手段と、
を有する、
ことを特徴とする回生制御装置。
【請求項2】
請求項1記載の回生制御装置であって、
前記所定のパターンは、前記状態が所定の時間継続するパターンである、
ことを特徴とする回生制御装置。
【請求項3】
請求項1記載の回生制御装置であって、
前記所定のパターンは、前記状態が所定の時間継続する状態が所定回数繰り返されるパターンである、
ことを特徴とする回生制御装置。
【請求項4】
請求項1から3のいずれか1項記載の回生制御装置であって、
前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する際に、前記目標減速度と前記エンジンのエンジンブレーキおよび前記電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較手段を有し、
前記制御手段は、前記第二の比較手段の比較結果により実減速度が目標減速度に達しており、このときの前記電動機の回生トルクが所定値以下であるときには、前記電動機のみによる走行形態とし、前記電動機の回生トルクを制動力として利用する、
ことを特徴とする回生制御装置。
【請求項5】
請求項1から4のいずれか1項記載の回生制御装置であって、
前記制御手段は、前記ハイブリッド自動車の始動時から最初の減速時には、前記電動機のみによる減速を実施し、前記電動機の回生発電により生じる回生トルクを制動力として利用する、
ことを特徴とする回生制御装置。
【請求項6】
請求項1から5のいずれか1項記載の回生制御装置を有することを特徴とするハイブリッド自動車。
【請求項7】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であると共に、前記電動機のみによる走行中に前記電動機の回生発電により生じる回生トルクを制動力として利用可能なハイブリッド自動車の回生制御方法において、
前記電動機のみによる走行中の減速時に前記電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と前記回生発電により生じる回生トルクによる実減速度とを比較する第一の比較ステップと、
前記電動機が最大の回生トルクを発生しているにも係わらず前記第一の比較ステップの比較結果により前記実減速度が前記目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、前記エンジンと前記電動機とが協働する走行形態とし、前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用するステップと、
前記エンジンのエンジンブレーキと前記電動機の回生トルクとを共に制動力として利用する際に、前記目標減速度と前記エンジンのエンジンブレーキおよび前記電動機の回生トルクを共に制動力として利用することによる実減速度とを比較する第二の比較ステップと、
前記第二の比較ステップの比較結果により実減速度が目標減速度に達しており、このときの前記電動機の回生トルクが所定値以下であるときには、前記電動機のみによる走行形態とし、前記電動機の回生トルクを制動力として利用するステップと、
を有する、
ことを特徴とする回生制御方法。
【請求項8】
情報処理装置に、請求項1から6のいずれか1項記載の回生制御装置の機能を実現させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−144195(P2012−144195A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−5287(P2011−5287)
【出願日】平成23年1月13日(2011.1.13)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月13日(2011.1.13)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
[ Back to top ]