
回路パターン検査装置およびその検査方法
【課題】検査準備時間が短く、1ダイの画像検出のみで欠陥判定のできる高速な回路パターン検査方式とその装置を提供する。
【解決手段】設計情報を参照して該当座標と同一のパターンが期待できる座標と位置合わせ用の座標を選定する。位置合わせ座標で検出画像と設計情報の位置合わせを行いずれ量を補正し、同一なパターンが期待できる座標のパターンと比較することにより、1ダイのみの画像検出であってもパターン比較を行うことができる。
【解決手段】設計情報を参照して該当座標と同一のパターンが期待できる座標と位置合わせ用の座標を選定する。位置合わせ座標で検出画像と設計情報の位置合わせを行いずれ量を補正し、同一なパターンが期待できる座標のパターンと比較することにより、1ダイのみの画像検出であってもパターン比較を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は半導体装置や液晶などの回路パターンを有する基板装置を電子線を利用して検査する検査装置およびその検査方法の技術に関する。
【背景技術】
【0002】
電子線式検査装置は、走査電子顕微鏡で試料の画像を取得し、得られた画像に種々の画像処理を行うことにより欠陥の有無を検査する装置である。検査対象であるウェーハ,マスクあるいは液晶基板などに電子線をスキャンし、発生する二次電子あるいは反射電子をステージ移動に同期して検出する。これにより得られるウェーハ上の回路パターンの二次電子画像を異なる位置のパターンと比較し、差が大きい場所を欠陥として判定する。比較により欠陥が検出できるのは、ウェーハ上に形成される回路パターンが周期性を有しているためであり、比較相手のパターンが隣接ダイの同一箇所であればダイ比較,メモリマット領域内の隣接セルであればセル比較と呼ばれる。
【0003】
また、比較相手のパターンを次々変える比較演算手法の他に、比較相手のパターンをある決まったパターンに固定し、このパターンを参照画像として比較演算対象とする欠陥検出手法もある。参照画像は、ウェーハ上に形成される実パターンの撮像画像の他、回路パターンの設計情報から画像情報を生成し、参照画像として用いてもよい。この場合、設計値との差異の大きいパターンを欠陥として検出していることになる。また、検出された欠陥は、ウェーハ上の分布が統計的に解析され、又は検出した欠陥の形状・特性が詳細に解析され、ウェーハの製造プロセスの制御にフィードバックされる。すなわち、その欠陥が発生したウェーハの製造時の問題点を分析するために使用される。
【0004】
特許文献1には、回路パターンの設計情報から生成された濃淡画像と実際に撮像した画像を比較するダイ・データベース検査方式が開示されている。
【0005】
画像と画像の濃淡情報の比較検査だけではなく、回路パターンの輪郭情報を欠陥検査に用いることもできる。特許第3524853号(特許文献2)には、回路パターンの設計情報から回路パターンの境界情報(エッジ情報)を抽出し、同様に撮像した画像に含まれる回路パターンから輪郭線情報を抽出して、両者を比較する方式の検査装置が記載されている。
【0006】
また、特開2009−194051号公報(特許文献3)には、与えられた複数の撮像箇所の画像を取得し、これらの画像に含まれる同一パターンを積算して参照パターンを生成し、この参照パターンから輪郭線を検出することで生成される平均輪郭画像と、取得画像から生成される輪郭画像とを比較する検査方式が記載されている。
【0007】
また、検査装置とは異なるが、特開2009−283917号公報(特許文献4)には、外観検査装置で検出された欠陥の位置情報を読込み、検出欠陥を高倍率で再撮像する欠陥レビューSEMと呼ばれる欠陥観察装置において、参照画像として使用可能な検出欠陥の近傍の位置情報を回路パターンの設計情報を用いて検出する装置の発明が記載されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平5−258703号公報(米国特許第5502306号)
【特許文献2】特許第3524853号公報(米国特許第6868175号)
【特許文献3】特開2009−194051号公報(米国公開特許2009/0202139)
【特許文献4】特開2009−283917号公報(米国公開特許2009/0268959)
【発明の概要】
【発明が解決しようとする課題】
【0009】
電子線式の外観検査装置あるいは欠陥検査機能を備えた欠陥レビュー装置といった、いわゆる電子線式パターン検査装置においては、複数ダイの検査であっても、1ダイの画像のみを用いて欠陥検査を行うこと、又は1ダイの画像を用いて欠陥検査を行うことが要求される場合がある。例えば、半導体プロセスにおけるフォトマスク(レチクルとも呼ばれる)の場合、試作用レチクルでは通常1つのマスクセットに複数の試作チップの回路が載っているため、1ダイの画像を用いて欠陥検出することが必要となる。また、実ウェーハの検査においても、試作ライン、又は多品種少量生産ラインで流れるウェーハでは、1ショット内に複数の異なるダイが搭載される場合があり、従って1ダイの画像を用いた欠陥検査が必要とされる。
【0010】
また、CPU等の多くのロジックが搭載された品種のウェーハではダイ寸法が大きく、1個のレチクルで1個のダイしか搭載されない場合が有る。EUV露光等でレチクル検査が困難である、又はレチクルへの異物付着を防止するペリクルが装着できない場合、又はOPCで生成されるパターンが期待したものであるかどうかの検証などでは一旦レチクルパターンをウェーハ上に露光し、転写されたパターンの検査を行う必要が有る。これらの場合には、転写パターンが設計どおりにできているかを検証、又はモニタする必要があり、隣接するダイとの比較では目的とする欠陥は検出されないし、セル比較ではメモリマット部検査は可能であるが、メモリマットの周辺部分や周辺回路の検査はできない。これらの場合には、1ダイのみの画像を用いた欠陥検出が必要となる。
【0011】
しかしながら、従来方式の場合、検査準備に時間を要しすぎる、又は検査自体が不可能であるという問題がある。
【0012】
例えば、特許文献1や2に記載されるダイ・データベース比較方式の検査の場合、撮像されるSEM(Scanning Electron Microscope)画像と比較するための画像データを準備する必要があるが、レチクル上に形成されている回路パターンは設計情報そのままではなく、OPC等のパターン変形が施されている。よって、レチクル検査の場合は、パターン変形を考慮したマスク形状のシミュレーション、ウェーハ検査の場合には、マスク変形のシミュレーションに加えて、更にマスクの転写シミュレーション(リソグラフィシミュレーション)、および検出される画像を転写パターンから推定するためのシミュレーションが必要となる。上記シミュレーションに伴う演算量は膨大であり、しかも検出したい欠陥のサイズが微細化すればするほど、変形量の推定は困難となる。特許文献2に記載のエッジ情報を用いた検査方式は、濃淡画像を用いた検査方式よりは演算量は少なくてすむが、上記のシミュレーションを行う必要がある点は同様である。
【0013】
特許文献3に記載の発明では、実画像から平均輪郭線を作成するためシミュレーションは不要となるが、平均輪郭線を作成するため同じパターンの画像を事前に複数枚取得する必要がある。よって、検査対象となる回路パターンが頻繁に変わる、又は、開発時で正常なパターンが入手できない、又はダイ全面に近いパターンを検査する必要があるような状況での検査には向いていない。また、特許文献3によれば、このようなパターンは、隣接チップないし違うウェーハの同一箇所の画像を撮像するか、あるいは同じFOV(Field Of View)内に存在する複数の同一パターンの画素同士を積算することにより得られるが、前者の手法は1つのダイの画像を用いた検査には適用できず、後者の手法は、FOV内に同一パターンが存在しなければ、検査自体が不可能である。
【0014】
特許文献4に記載の発明は欠陥観察装置に関する発明であり、設計情報から参照画像の位置を探索するにあたって、欠陥の位置情報を必要とする。
【0015】
このように、いずれの方式も一長一短があり、検査に要する事前の準備時間が短く、かつ1ダイの画像を用いて、高速に欠陥判定を実行可能な回路パターン検査装置ないし検査方法は実現されていない。本発明は、このような検査を実行可能な回路パターン検査装置ないし検査方法は実現することを目的とする。
【課題を解決するための手段】
【0016】
本発明は、設計上同じパターンとなる筈のダイ内の位置情報を、検査対象となるパターンの設計情報を用いて抽出し、抽出された複数の位置情報のうち少なくとも2箇所の画像を取得し、これら取得画像を用いて欠陥検出を行うことにより上記課題を解決する。欠陥検出手法としては、濃淡情報・輪郭情報のいずれを用いても構わない。
【0017】
言い換えると、本発明は、欠陥検出に必要となる画像の撮像位置を予め決めておきこれに従って画像を取得することにより上記課題を解決する。あるいは、欠陥検出のための比較演算のペアを1チップの設計情報から予め決め、それに従って画像を取得することにより、上記課題を解決する。
【発明の効果】
【0018】
シミュレーションが不要となるため、従来のダイ・データベース検査に比べて、格段に検査準備時間が短縮される。これにより、検査準備時間が短く、1ダイの画像検出で欠陥を判定できる高速な電子線式パターン検査装置ないし検査方法が提供できる。
【図面の簡単な説明】
【0019】
【図1】設計情報を用いて欠陥検出のための比較演算に用いる部分画像のペアを決定するためのアルゴリズムの概念説明図。
【図2】第1の実施例に係る検査装置の全体構成図。
【図3】第1の実施例における検査方法のフローチャート。
【図4】設計情報の階層構造と比較演算ペアの関係を示す概念図。
【図5】ダイレイアウトとスワスレイアウトを示す模式図。
【図6】第1の実施例の検査装置の欠陥判定部のハードウェア構成例と機能ブロックの構成例を示す図。
【図7】第4の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【図8】第5の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【図9】第6の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【発明を実施するための形態】
【0020】
以下では、各実施例に共通する検査の原理について、図1を用いて説明する。本説明では、半導体ウェーハないし半導体マスクの検査に限定して説明するが、他の被検査試料、例えば半導体デバイス(半導体装置)あるいは液晶などにも適用できることは言うまでもない。
【0021】
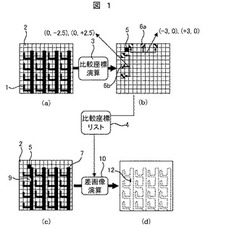
図1は、検査対象の設計情報を用いた検査前準備の手順と、検出画像からの欠陥判定方法を示す概念図である。図1(a)に示されるように、GDS2データやOASISなどの設計情報から求められる設計パターン1を仮想的にメッシュ2で分割し、適当な計算機での比較座標演算3により同一のパターンであるはずの位置の座標を各メッシュ毎に抽出し、比較座標リスト4として作成しておく。メッシュサイズは、画像処理の際の処理の切換単位(演算処理の際に一度に処理する画素数)と画素寸法の積によって定まる。画素寸法は、2nm〜30nm、画像処理の切替単位は、32画素角〜1024画素程度が想定され、メッシュサイズの範囲は64nm〜30μm程度である。例えば、画素寸法を10nm、画像処理での処理の切替単位を128画素角とした場合、1.28μmとなる。また、同一のパターンであるはずの判定に当たっては、メッシュの外側にOPCの影響範囲、又は画像に対して支配的な影響力を持つ隣接するパターンまで含めて判定することで、より正確に判定することができる。
【0022】
図1(b)は、図1(a)に示されるメッシュと比較座標リスト4に含まれる同一パターン位置座標の関係を示す概念図である。例えば、メッシュ6aについては、右側および左側に3メッシュ分ずれた位置が同一パターンの位置であり、メッシュ6bについては、上側ないし下側に2.5メッシュ分ずれた位置が同一パターンの形成位置である。比較座標リスト4は、図1(a)に示される各メッシュのIDと、当該IDのメッシュの比較対象の位置情報および位置合わせ用のメッシュ(図1(b)ではメッシュ5)の位置情報を少なくとも含んで構成される。メッシュに分割された各位置の座標とIDとの対応は事前に定めておく。以降の説明では、位置合わせ用メッシュの位置情報(例えば、メッシュ5の位置情報)とあるメッシュIDに対する比較相手の位置情報(例えば、メッシュ6aであれば、(−3,0)(+3,0)などのメッシュ単位のオフセット情報)を総称して、各々「位置合わせ座標リスト」「同一座標リスト」と称し、これらは比較座標リスト4に含まれる。
【0023】
なお、同一座標リストに格納される比較相手の位置情報の様式としては、メッシュを単位としたオフセット情報とメッシュに対するパターンの位置オフセットの2つのオフセット情報が必要であるが、ディジタル画像上の画素単位の相対オフセット座標,設計パターン上の相対座標など、座標情報を直接格納しても構わない。後の2方式は、実質的には最初の方式のメッシュ単位のオフセットとメッシュ内のオフセットを含んでいることになる。
【0024】
図1(c)は、実際に検出されるSEM画像(検出画像7)を示す。撮像された検出画像7を設計パターン1と同様にメッシュ8に分割する。検出画像7には欠陥9を含んでいるとする。以降の説明では、メッシュ分割された検出画像の各メッシュ部分の画像を「部分画像」と称する。検出画像7のうち位置合わせ用のメッシュ5に対応する部分画像を設計パターン1に対して位置合わせし、これにより、各部分画像の座標が確定され、検出画像7から切り出される部分画像の範囲が確定される。なお、位置合わせ用メッシュは位置合わせ量が大きく変化しない範囲に応じて適切な間隔で配置するものとする。また、位置合わせには、帯電などで発生する可能性のある位置ずれ量の範囲内で別のパターンと一致することのないユニークなパターンが必要となる。ただし、同一パターンの抽出範囲内に条件を満足するユニークパターンが存在しない場合には、適当なパターンで一旦位置合わせを行い、同一パターンであるかの判定範囲を小さくし、この条件を満足するユニークなパターンを設定して、複数段で位置合わせをする構成をとることもできる。これが可能と成るのは、位置合わせのされたパターン間は大きくは外れることはないためである。また、位置合わせ用のメッシュは1個のメッシュのみで構成しても複数個のメッシュの組合わせで構成してもよい。
【0025】
部分画像の切り出し範囲が確定すると、比較座標リストに従って、各メッシュIDとその比較相手に相当する部分画像を検出画像から切り出し、差画像演算10を実行して欠陥有無を判定する。欠陥判定に際しては、切り出した部分画像は少なくとも2回以上比較相手に相当する部分画像と比較し、何れも欠陥と判定された場合には欠陥と判定する処理の他、比較相手に相当する部分画像複数箇所の同一パターンからゴールデンパターン(欠陥の無い参照パターン)を生成し、生成したゴールデンパターンと比較する、又は位置合わせ情報の付加情報として予め取得又は演算しておいたゴールデンを持ち、このゴールデンパターンと比較するなど、各種のアルゴリズムを使用可能である。また、差画像演算による欠陥判定を行わずに、検出画像から演算で求めた輪郭線の差分を用いて欠陥判定を行ってもよく、あるいは差画像と輪郭線の差分を演算する方式とを組合わせて欠陥判定を行ってもよい。図1(d)には、差画像演算により欠陥9が差画像12として検出された様子を示す。
【0026】
以上の説明では、説明の容易化のために、1枚の画像(1つのFOVで撮像された画像)を検出画像とし、設計パターンをメッシュで分割したが、メッシュは均一でなくとも、又は重複、抜けがあってもかまわない。つまり、抜けがあってもかまわないとは、パターンが無い場所、回路動作とは無関係のダミーパターン部分、大きな欠陥が有ってもかまわない部位は欠陥判定する必要が無いことを意味している。
【0027】
また、メッシュに跨る箇所に重要な部位が来ないように重複があってもかまわない。更に、検出画像は同一の画素寸法で均質に取得する必要は無く、メッシュ毎に検出画素寸法を指定しておき、動的に画素寸法を変えながら画像取得してもかまわない。更に、画像取得はステージを連続移動しながら動的に画素寸法を変更しながら重要な設計部位の画像を取得する、あるいは検査したい複数のメッシュ,位置合わせメッシュと対応する比較対象のメッシュ部分のみの画像を取得するようにステージをステップアンドリピート方式で画像取得してもかまわない。
【実施例1】
【0028】
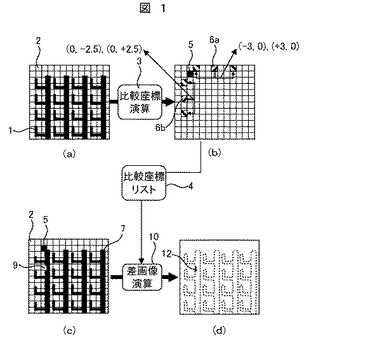
以下、本発明による検査方法、及び検査装置の第1の実施例について、図面を参照しながら詳細に説明する。図2は、本実施例の検査装置の構成を示す縦断面図である。
【0029】
本実施例の検査装置は、走査型電子顕微鏡を応用したものであり、主要部は真空容器内に収納されている。これは、半導体ウェーハなどの基板に一次荷電粒子線を照射するためである。本実施例の検査装置は、電子源31で発生した一次荷電粒子線32を試料台39に載置されたウェーハ36に照射し、発生する二次電子または反射電子などの二次荷電粒子40を検出器43で検出して二次荷電粒子信号として信号出力する荷電粒子カラム、上記試料台39をXY面内に移動させるXYステージ37、カラムから出力された二次荷電粒子信号を画像化し、参照画像と比較して信号量に差がある画素を欠陥候補として抽出する欠陥判定部47,上述の荷電粒子カラム,XYステージ37,欠陥判定部47を統括的に制御する全体制御部48などにより構成される。全体制御部48には二次記憶装置204が接続されており、全体制御部48で実行されるソフトウェアや各種の制御情報などが格納されている。XYステージ37や試料台39は、真空試料室内に保持される。
【0030】
ウェーハ36上に一次荷電粒子線32のエネルギーを収束させるために、対物レンズ34で一次荷電粒子線32を細く絞るので、一次荷電粒子線32の直径はウェーハ36上では非常に小さい。一次荷電粒子線32は、偏向器33によりウェーハ36上の所定領域を偏向され、ウェーハ36上を走査される。走査による移動位置と検出器43による二次荷電粒子40の検出タイミングとを同期させることで、二次元の画像を形成することができる。
【0031】
ウェーハ36の表面には様々な材料で構成された各種の回路パターンが形成されており、欠陥を検出しやすくするためにウェーハ36の表面に適当な帯電を形成したい場合がある。本実施例では、ウェーハ36の手前に帯電制御電極35を設け、帯電制御電極35に印加する電位の大きさと極性によりウェーハ36に所望の帯電を形成するようにしている。
【0032】
ウェーハ36の検査の前に、標準試料片51に一次荷電粒子線32を照射して画像化し、一次荷電粒子線照射位置の座標の校正と、焦点の校正を行う。前述のように、一次荷電粒子線32の直径は非常に小さく、また偏向器33による走査幅もウェーハ36の大きさと較べて非常に小さいため、一次荷電粒子線32の走査により一度に取得できる画像の視野は非常に小さい。したがって、検査の前に、ウェーハ36をXYステージ37へ載置したら、光学顕微鏡50による比較的低い拡大倍率の画像でウェーハ36上に設けられた座標校正用のアライメントマークを検出し、XYステージ37を移動させて該アライメントマークが一次荷電粒子線32の下に位置付けるようにして、座標の校正を行う。
【0033】
焦点の校正は、ウェーハ36の高さを計測するZセンサ38により標準試料片51の高さを計測し、次に、ウェーハ36に設けられたアライメントマークの高さを計測し、この計測値を用いて、対物レンズ34で絞られた一次荷電粒子線32の焦点範囲がアライメントマークを含むように、対物レンズ34の励磁強度を調整する。
【0034】
ウェーハ36で発生した二次荷電粒子40をできるだけ多く検出する目的で、ExB偏向器42で反射板41に二次荷電粒子40が多く当るようにし、反射板41で発生した第二の二次電子を検出器43で検出する。
【0035】
全体制御部48は、前述の座標の校正動作,焦点校正動作などを制御する。また、偏向器33に対して制御信号aを送信し、対物レンズに対して励磁電流強度の制御信号bを送信する。また、Zセンサ38から送信されるウェーハ36の高さの計測値cを受信し、XYステージ37を制御する制御信号dをXYステージ37に対して送信する。
【0036】
検出器43から出力された二次荷電粒子信号は、AD変換器45でディジタル信号44に変換される。
【0037】
欠陥判定部47は、ディジタル信号44から画像を生成し、参照画像と比較し、明るさの値に差のある複数の画素を欠陥候補として抽出し、その画像信号と対応するウェーハ36上の座標とを含む欠陥情報信号eを、全体制御部48へ送信する。上記の欠陥情報信号eは信号伝送線205を介して全体制御部48に送信され、また全体制御部48あるいは後述する比較座標リスト演算プロセッサ52で生成された各種の情報も信号伝送線205により欠陥判定部47に伝送される。欠陥候補の判定に際しては、前述の通り各種のアルゴリズムを使用可能であり、輪郭線情報を用いた欠陥判定も可能である。
【0038】
本実施例の検査装置は、コンソール49を備える。コンソール49は、全体制御部48に接続されており、欠陥の画像がコンソール49のスクリーンへ表示されるとともに、全体制御部48は、コンソール49で入力された検査条件fに基づいて、偏向器33の制御信号a,対物レンズの強度の制御信号b,XYステージ37を制御する制御信号dを演算する。また、コンソール49は、上記検査条件を入力するためのキーボードやポインティングデバイス(マウスなど)が備えられており、装置ユーザは、上記スクリーンに表示されるGUI画面に対して、上記キーボード,ポインティングデバイスを操作して、上記の検査条件を入力する。
【0039】
また、本実施例の検査装置は、比較座標リスト演算プロセッサ52を持ち、オペレータがコンソール49から入力した指示に従って、同一のパターンの座標リストである同一座標リスト6と位置合わせ座標リスト5を含む比較座標リスト4を、ウェーハ36に形成されたパターンの設計情報に基づき生成する機能を有している。比較座標リスト演算プロセッサ52は、検査動作とは独立に、検査動作中であっても並列に動作することができる。また、比較座標リスト演算プロセッサ52にも二次記憶装置203が接続されており、比較座標リスト演算プロセッサ52で実行されるソフトウェアや各種の制御情報などが格納されている。
【0040】
検査に先立って、コンソール49からの指示に応じて比較座標リスト演算プロセッサ52で設計情報からパターンの比較座標リスト4の作成を行う。パターンの設計データはCADサーバ201に格納されており、LANなどの通信ネットワーク202を介して全体制御部48に接続されている。
【0041】
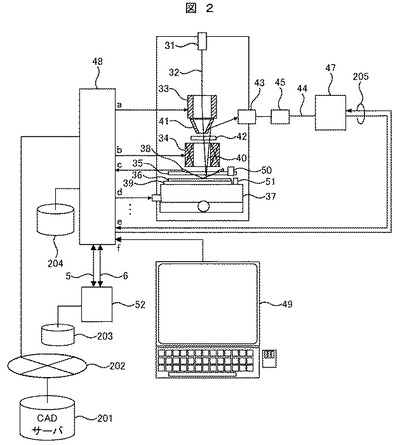
検査に先立っては、検査条件と検査手順を決めるレシピ作成を行う。図3(a)(b)(c)には、夫々、比較座標リスト演算を示すフローチャートと、レシピ作成を示すフローチャートと、設定されたレシピに沿って実行される本検査の手順を示すフローチャートを示す。
【0042】
図3(a)において、コンソール49からの指示に応じて、検査対象となるデバイスの配線パターンあるいはマスクパターンの設計情報が読込まれる。半導体デバイスは、通常多数のレイヤの配線パターンが積層されて構成されているため、設計情報読出しの際には、ウェーハIDやプロセスIDなど、製品品種や製造工程(レイヤの識別情報)が参照される。設計情報は、二次記憶装置203ないし204にCADサーバ201から事前に取り込まれているか、あるいは図3(a)のフローを実行する都度CADサーバ201から読出される。
【0043】
比較座標リスト演算プロセッサ52は、読込んだ設計データを比較座標リスト4に変換し(ステップ71)、品種・工程毎に二次記憶装置203に格納する(ステップ72)。
【0044】
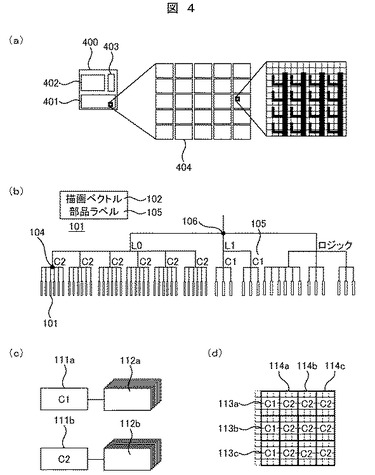
次に、図3(a)に示した比較座標リスト情報作成ステップ71について図4を用いて説明する。図4(a)に被検査対象であるダイの模式図を、図4(b)には、図4(a)に示したダイレイアウトに対応する設計情報の論理構成例を、図4(c)には、設計情報上同一のパターンを有する領域のラベル情報と同一パターン形成領域の位置情報との対応を示す概念図を、図4(d)には、同一パターン情報の配列を示す同一パターン配列例を、それぞれ示す。
【0045】
半導体ウェーハ上に形成される回路パターンは、基本的には同じパターンが周期配列されて形成されている。図4(a)の左図に示したダイ400内のレイアウトは、例えばメモリ領域401,ロジック領域402,周辺回路領域403といった複数の領域に分割され、これらの各領域は更に小さな領域に分類される。例えば、メモリ領域401は、図4(a)の中央図に示した複数のメモリマット404というより細かな構成単位に分割することができ、最終的には、図4(a)の右図に示すように、メモリセルを構成するトランジスタのゲート電極や配線といった回路パターンを構成する最小構成単位(リソグラフィ時にウェーハに焼き付けられる描画パターンの一つ一つ)まで分割される。
【0046】
一方、形成されるパターンの周期性から、回路パターンの設計情報は論理的には図4(b)に示すような階層構造で表現することができる。最下位の階層に描画データ101が位置し、複数の描画データ101が纏まってより上位の回路パターンの構成単位を形成する。従って、階層構造の分岐は、下位の構造単位が複数まとまった上位の構成単位に相当する。以降の説明では、階層構造のある分岐より下の枝葉に相当する構成単位を当該構成単位に対する「部品」と称する。描画データは、階層構造の別の場所と同一のデータを共有していることもある。
【0047】
最下層の描画データ101には、ウェーハに形成されるパターンを記述する描画ベクトル102と部品ラベル105が付随している。最下層の描画データから1つ上位の階層の部品104には、C1,C2といった部品名を記述する部品ラベル105と部品を構成するために必要な複数の描画データ101が含まれる。また、部品104の1つ上位の階層の部品には、L0,L1,ロジックといった部品名を記述する部品ラベルおよびこれらを構成する下位の部品ラベルの情報が含まれている。これら複数の階層が積み重ねられて最終的に検査対象の工程に関連する描画ベクトルとして1個の設計情報106が形成されている。
【0048】
以上説明した描画データおよび当該描画データあるいは各階層に付与された部品ラベルの情報は、設計情報の一部としてCADサーバ201に格納されており、前述の通り二次記憶装置203または204に事前に格納されるか、あるいは図3(a)に示した比較座標リスト情報作成ステップ71の実行の都度、CADサーバ201からダウンロードされる。
【0049】
さて、比較座標リスト演算プロセッサ52は、図3(a)のステップ71にて、上述の描画ベクトル、部品ラベルの情報を設計データから読取り、パターンを計算機上で描画し、描画結果に基づき同一パターンの存在する位置情報を求める。同一パターン情報は部品ラベル111a,111b毎にパターンを含む位置座標と寸法を含む領域情報112a,112bを有している。同一の部品ラベルを持つ描画領域は同一のパターンを有しているので、部品ラベル111a,111b毎に対応する描画ベクトル102の描画される領域を演算して、領域情報112a,112bを演算する。求めた同一パターンの位置情報は部品ラベル毎にまとめられ、二次記憶装置203に格納される。
【0050】
図4(c)には、部品ラベルC1,C2に対して、設計データ上同一パターンが存在する領域の領域情報112a,112bが対応付けられて格納される様子を模式的に示した。
【0051】
部品ラベル111a,111bにはレイアウト情報の下位階層近くの小さな領域を含む場合と上位階層近くの大きな領域を含む場合がある。下位階層の場合には、同一ラベルであっても、描画データが異なる場合が有るので、同一パターン情報にするときに別のラベルとして扱うようにする。
【0052】
図4(d)には、図4(c)に示した部品ラベルと領域情報112a,112bのウェーハ上での平面配置関係を表す模式図を示す。ラベルC1の領域113a,113b,113cが縦一列に並び、ラベルC2の領域114a,114b,114cが二次元的に配列している事が判る。また、一般に画像を検出する場合に、設計パターンからずれて検出される。設計情報に基づいて処理をする場合には、位置合わせが必要となる。予想される最大のずれ量内に同一のラベルを持たない、又は同一形状の無い部品ラベルの領域で位置合わせをする必要がある。
【0053】
描画データの展開される領域をメッシュで分割して、メッシュで分割した領域が位置合わせに適した領域であれば、該当するメッシュが位置合わせ用のパターンであるとして、メッシュ座標と、位置合わせ用の描画ベクトル102を合せた位置合わせ座標リスト5とする。また、メッシュで分割した領域と同一のラベルがあるメッシュ位置を少なくとも2個以上登録した同一座標リスト6とする。また、これら同一座標リスト6と位置合わせ座標リスト5を纏めて比較座標リスト4とする。
【0054】
なお、当初想定した同一パターンの抽出範囲内には比較演算ペアが存在しない場合も考えられる。そのような場合には、全体、又は部分的にメッシュサイズを小さくして再度メッシュ分割をやり直す。メッシュサイズが十分小さければ、メッシュ内に存在できるパターンが単純化され、複雑なパターンであっても同一パターンが存在するようになる。もし、メッシュサイズを十分小さくしても同一パターンが存在しないようであれば、そのような領域は検査不可能領域として比較座標リスト4に登録する。又は正常なパターンを予め取得した画像、又は設計情報から擬似的な画像を生成して検査を行う。このような擬似的な画像を用いる場合、生成誤差を配慮する必要があるため、欠陥検出条件(欠陥検出のしきい値など)を低感度に設定する。
【0055】
図3(b)には、本実施例の検査方法におけるレシピ設定手順を示すフローチャートを示した。図3(b)において、はじめに、全体制御部48が予め作成され記憶されている標準レシピを読込む。同時に、検査対象であるウェーハ36が検査装置へロードされ、同時に比較座標リスト4を読込む(ステップ73)。全体制御部48は、標準レシピの読込み処理と、ウェーハ36のロードとを、オペレータがコンソール49により入力する指令を契機として開始する。ロードされたウェーハ36は、試料台39に搭載される。次に、全体制御部48は、読込んだ標準レシピに基づいて、電子源31へ印加される電圧、対物レンズ34の励磁強度,帯電制御電極35へ印加される電圧,偏向器33へ印加される電流などの光学系条件を設定し、標準試料片51の画像に基づき、ウェーハ36のアライメントマークを基準とした座標と検査装置のXYステージ37の座標との間の補正を求めるアライメント条件を設定し、ウェーハ36の中の検査対象とする領域を示す検査領域情報を設定し、画像の光量を調整するための画像を取得する座標と検出器43の初期ゲインを登録するキャリブレーション条件を設定する。次に、検査感度を設定し(ステップ74)、比較座標設定(ステップ75)を行う。
【0056】
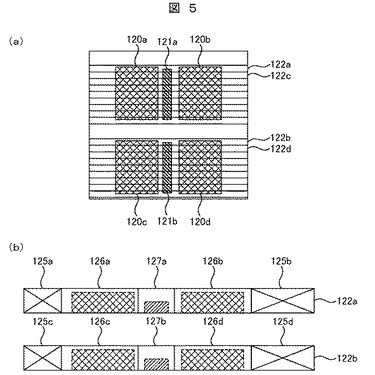
ここで、読込んだ同一座標リスト6では、同一階層で1箇所の座標につき複数箇所の比較候補が有る。また、ある階層のある検査座標に対する比較候補パターンが、異なる階層(上位または下位の階層)に存在する場合が有る。以下では、どの比較候補と比較するかを図5を用いて説明する。
【0057】
図5(a)はダイ内のレイアウト全体を、図5(b)は図5(a)に示したスワス122aおよび122bのレイアウトを拡大して示している。ここで、“スワス”とは、ステージ連続移動方式の検査装置で取得される画像を意味し、ステージを連続で移動させながら当該ステージの移動方向と交差する方向に電子ビームを偏向して二次荷電粒子信号を検出することにより取得される。よって、全体制御部48はXYステージ37に対し、X方向又はY方向をステージの移動方向の入力情報として与える。例えば移動方向をX方向とした場合、1回のステージスキャンで取得されるのはスワス122a〜122dとなる。そこで、ステージ移動方向に垂直なY方向に同一の座標を有している比較候補を優先して比較候補を選定する。120a,120bは同一の部品ラベル105を持つ領域であるので、これらが比較対象に選定される。
【0058】
領域121aは同一なラベルを有する領域が同一スワス内に無く、121bと比較することになる。従って、スワスレイアウト上では、左から順にパターンが無く検査の不要な非検査領域125a,比較対象が同一スワス内に有る同一スワス内比較領域126a,別のスワスと比較する別スワス比較領域127a、以下同様な領域が配置される。
【0059】
次にスワスを設計情報と同一のメッシュに分割し、分割した各メッシュ毎に、比較座標リスト6と、場合によっては位置合わせ座標リスト5を纏めて比較座標リスト4とし、レシピの内部に保持するデータとして欠陥判定部47を制御する欠陥判定制御部600の二次記憶装置に記憶しておく。また、スワス間を跨る比較では後で説明するが、一旦検出した画像を退避しておいて比較対象の画像を検出したときに退避した画像と比較することになるので、スワスの走査順は退避量が最小となるようにスケジューリングすることが望ましい。
【0060】
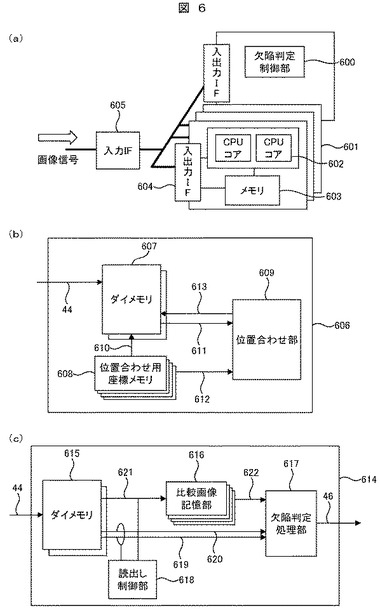
次に、試し検査(ステップ76)について図6を用いて説明する。図6(a)は、図2に示した欠陥判定部47のハードウェア構成図、図6(b)は欠陥判定部47で実行される位置合わせ処理の詳細を示すブロック図、図6(c)は欠陥判定部47で実行される欠陥判定処理の詳細を示すブロック図を示す。
【0061】
欠陥判定部47は、ハードウェア上は、複数のCPUコアからなるプロセッサユニット602,画像メモリ603および入出力インタフェース604を備えた1Uの画像処理基板601および全体を制御する欠陥判定制御部600が実装された情報処理基板が、それぞれバックプレーンに挿入された構成を有する。欠陥判定部47に入力される画像信号は、バックプレーン側に設けられた入力インタフェース605を介して上記複数の画像処理基板に分配される。バックプレーンはSRIO等の高速バスの場合、又はインフィニバンド、10GLANで代表される高速ネットワーク構成の場合がある。画像処理基板601上に実装されたメモリ603のメモリ空間上には二次記憶装置203に格納されたプログラムが展開されており、これをプロセッサユニット602が実行することにより、図6(b)に示される位置合わせ用機能ブロック606あるいは図6(c)に示される欠陥判定用機能ブロック614が実現される。なお、図6(a)では、欠陥判定部600は、専用の処理チップを設ける実装形態を示しているが、欠陥判定部600の機能をソフトウェアにより実現してもよい。この場合、バックプレーンに挿入された複数の情報処理基板のいずれか一つのメモリに欠陥判定部600の機能を実現するプログラムが格納されることになる。
【0062】
次に、図6(b)を用いて位置合わせ処理について説明する。
【0063】
まず、図3(b)のステップ76の実行前に、全体を制御する欠陥判定制御部600に格納された同一座標リスト6、及び位置合わせの座標と対応する描画ベクトルより展開した画素単位のエッジ画像情報より成る位置合わせ座標リスト5が読込まれる。
【0064】
次に、全体制御部48よりの指令でXYステージ37を駆動し、駆動したXYステージ37の駆動に同期して、偏向器33を走査することで、一次荷電粒子線32をラスタスキャンの要領でウェーハ36を走査,発生する二次電子を検出器43で検出、AD変換器45でディジタル信号44に変換し欠陥判定部47に送る。欠陥判定部47では入力IF605経由で画像信号を受信し、ディジタル信号44として、ダイメモリ607に格納する。実際のハードウェアでは、ダイメモリ607は複数枚の画像処理基板601上のメモリ602で構成されている。1回のステージ走査で取得する画像を画像処理基板601の枚数で分割し、分割した画像を各画像処理基板601のメモリ602に順番に格納する。予め、又は画像の格納と同時に、欠陥判定制御部600に格納してある比較座標リスト4中の位置合わせ座標リスト5を対応する画像処理基板601に分配し、メモリ603に合わせて格納する。
【0065】
以上の制御により、ステップ76の実行時には、AD変換器45から出力されるディジタル信号44のうち検査すべき領域の信号(図5の126a〜d、及び127a,b)が複数枚で構成されたダイメモリ607に記憶される。
【0066】
試し検査の際に行われる位置合わせ処理は以下の手順で行う。
(1)欠陥判定制御部600よりの指令で、位置合わせ座標リスト5の座標データを参照して、ダイメモリ607より切り出したメッシュの部分画像611、及び位置合わせ座標リスト5のエッジ画像612を位置合わせ部609に送信する。位置合わせ部609は実際のハードウェアではプロセッサユニット602で構成されているので、画像処理基板601の制御部(図には示していない)が、位置合わせ座標リスト5の座標データを参照して、メモリ603より部分画像611読出し、位置合わせ座標リスト5と共に、プロセッサユニット602のCPUコアに送信することになる。CPUコアは、部分画像611より抽出したエッジ情報と位置合わせ座標リスト5中のエッジ画像612を位置合わせして、位置合わせ結果及び位置合わせ座標リスト5中の座標データのペアである位置合わせ結果613を欠陥判定制御部600に送信する。
(2)欠陥判定制御部600では送信された位置合わせ結果613に基づき、スワス全体のずれ量分布を決定し、ダイメモリ607に座標の補正量として格納する。ダイメモリ607のハードウェアはメモリ603であるので、対応する画像処理基板601に分割して格納することになる。
【0067】
これらの動作により、設計情報のメッシュに対応する画像の座標が確定する。因みに、ずれ量分布を欠陥判定制御部600で演算する構成で説明したが、画像処理基板601に分配された領域内のみでずれ量分布を演算する構成でもかまわない。また、位置合わせは、2段階で行うこともできる。即ち、ずれ量は可能性のあるずれ範囲内で一意に位置合わせができる必要がある。しかし、パターンに該当する場所が無い場合には、一意に決まる点でずれ量分布を求めた後、その中間地点ではほぼ線形で補間したずれ量に近いずれ量になることが予想されることを利用して、狭い範囲でずれ量を計測することで、正確な分布を不利なパターンであっても求めるものである。
【0068】
次に、図6(c)を用いて欠陥判定処理について説明する。
【0069】
欠陥判定部614の論理構成はダイメモリ615、及びダイメモリ615の読出しを制御する読出し制御部618、及び同一のスワスに比較すべき画像が無い場合に、ダイメモリ615の画像621を保持しておく比較画像記憶部616、及びダイメモリ615より読出した検出画像619と参照画像620又は一旦比較画像記憶部616に記憶された以前のスワスの記憶参照画像622と検出画像619を比較して差がある部分を欠陥候補46として判定する欠陥判定処理部617で構成される。ハードウェアは、以下の対応となる。ダイメモリ615はメモリ603、読出し制御部618は画像処理基板制御部(非表示)、比較画像記憶部はメモリ603、欠陥判定処理部617はプロセッシングユニット602である。
【0070】
位置合わせが終了すると、欠陥判定制御部600よりの指示で、同一座標リスト6を参照して、読出し制御部618にメッシュで分割されたダイメモリ内の画像毎に、比較画像記憶部616に記憶する、検出画像とする、又は参照画像とすることを決める。また、同一座標リスト6を参照して、欠陥判定処理部617は検出画像619を記憶参照画像622、又は参照画像620の何れと比較するかを決定し、いずれかと比較して差がある部分を欠陥候補46として判定し、欠陥判定制御部600に送信する。欠陥候補46には検出画像の座標,参照又は記憶参照画像の座標,欠陥の特徴量の情報が含まれている。
【0071】
少なくとも1箇所のメッシュに分割された画像に対しては2箇所の参照画像、又は1箇所の参照画像と別メッシュの検出画像からの参照指定、又は2箇所の別メッシュの検出画像よりの参照画像としての指定が同一座標リスト6に指定しておく。これにより、検出画像であるか、参照画像であるか、記憶参照画像であるかは別にして少なくとも2回比較が行われることになる。無論、ダイメモリ615は複数の画像処理基板601のダイメモリ603で構成されているので、同一の画像処理基板のメモリに参照画像が無い場合もあるので、バックプレーンを介して該当する画像を取得することになる。
【0072】
欠陥判定制御部600では欠陥候補46の検出画像の座標、及び参照又は記憶参照画像の座標の2個を欠陥候補の座標として集計し、同一の座標点が2回以上表れた場合、真の欠陥として判定する。
【0073】
次に検査条件確認(ステップ77)の動作を説明する。検出された欠陥部の画像を再度高解像度で検出した、又は欠陥判定に用いた画像で本来の欠陥であるかどうかを確認し、問題なければ正しい条件が設定されたとし、問題が有る場合には検査感度条件から設定をし直す物である。正しい条件出しができた場合にはレシピを保存し、ウェーハをアンロードして終了する。
【0074】
次に、図3(c)に示す本検査の手順について説明する。比較座標リストを含むレシピを読込み、ウェーハをロード、光学条件などを設定し、アライメントマークに対して位置合わせ、信号量を最適とするキャリブレーションを行う。キャリブレーションの実行後、図3(b)と同じ要領で比較座標を設定(ステップ75)し、指定された順でスワスの画像を検出する。更に、図3(b)のステップ77で説明した試し検査と同一の手順で欠陥判定する(ステップ78)。検査結果の欠陥情報を結果保存し、ウェーハをアンロードして終了する。
【0075】
以上のように、本実施例の欠陥検査装置は設計情報のパターン情報を位置合わせのみに用い、欠陥判定には用いていないので、検出パターンを推定するシミュレーションやパターン変形などの処理が不要であり、前処理時間が短くてすむ。また、シミュレーションやパターン変形などの計算処理に起因するパターン推定誤差が無く、よって高感度な欠陥検出が可能である。また、図5に示すように、取得したスワス画像のうち、無パターン部分やダミーパターンといった検査が不要な領域を設計情報に基づき非検査領域に設定し、その部分に関する比較演算処理は行わないため、本質的な欠陥のみを抽出できる。更にまた、設計情報を参照して同一である領域のパターン同士の濃淡画像を比較しているため、比較的大きな画素寸法であっても画素寸法と同等以下の微細な欠陥を高感度に欠陥判定ができる特徴がある。
【0076】
以上、本実施例の欠陥検査装置により、検査準備時間が短く、1ダイの画像検出で欠陥を判定できる高速な電子線式パターン検査装置ないし検査方法を提供することが可能となる。なお、以上の説明では、ステージ連続移動方式の検査装置を例として説明を行ったが、本実施例の構成がステップアンドリピート方式の検査装置に対しても適用できることは言うまでも無い。
【実施例2】
【0077】
本実施例では、ステージ移動を一次荷電粒子線の偏向速度とは非同期で実行する検査装置について説明する。装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0078】
図5で説明したように、検査対象となる試料には、無パターン部分やダミーパターンといった検査が不要な領域(例えば、領域125a〜125dなど)が存在する。このような検査の不要な非検査領域125は検査が不要であるのみならず、画像検出も不要である。ところがステージ連続移動方式の検査装置の場合、検査不要領域に対してビーム照射を行わないだけでは、検査スループットは向上しない。
【0079】
理論的には、1ラインの画像取得に要する時間はクロック,ライン当たりの画素数を変えなければ、一定である。ステージを移動しながら、ダイ全面の画像を取得するのに要するライン数をD本とし、これに要する時間をT秒とする。画像取得をするライン数が100%の場合にはT秒、10%の場合、0.1T秒の時間で済むように動作させることができるはずである。しかし、ステージ移動速度を100%と同一とした場合には、画像取得は10%であってもT秒かかってしまう。
【0080】
ステージ連続移動方式の検査装置の場合、単位時間あたりの撮像面積はステージの送り速度と一次荷電粒子線の偏向速度(偏向周波数)により定まる。ブランキングなどのビーム遮蔽手段により、検査不要領域へのビーム照射をオフしたとしても、その間、検出器からは画像信号は出力されず、スワスに画像の空白領域が形成されるだけである。つまり、単純に検査不要領域へのビーム照射をやめるだけでは検査スループットは向上せず、検査要領域がビーム照射位置あるいは荷電粒子カラムのFOV内に移動してくるまでの待ち時間をいかに低減できるかが検査高速化のカギとなる。従って、XYステージの送り速度を高速化することにより、検査スループットを向上できる。
【0081】
従来、ステージ連続移動方式の検査装置の場合、XYステージの送り速度は、スワス画像を構成する走査ライン1本を一次荷電粒子線が走査する時間の間に(XYステージが)走査ラインと交差する方向に1画素分だけ移動する速度(以下、同期速度と称する)に設定されており、ステージの高速化は困難であった。
【0082】
そこで、ステージ移動速度を一次荷電粒子線の偏向速度と非同期に、つまり、走査ライン1本のビーム偏向時間の間に移動するステージの距離が1画素分以上となるようにXYステージを制御条件を設定することにより、従来よりも単位時間あたりの撮像面積(検査不要領域を含む)を増大できる。
【0083】
非同期制御の場合、何もしなければ、一次荷電粒子線の走査ラインは本来走査すべき位置からステージの進行方向側にシフトしていくことになる。そこで、ステージ移動に対するビーム偏向位置の遅れをステージ移動方向と同じ方向へのビーム偏向により補正する。これにより、XYステージを非同期で動作させても正しい撮像位置の画像検出が可能となる。
【0084】
走査ラインのずれを補正するためのビーム偏向量は、図5(b)に示されるスワスレイアウト内の検査要領域と検査不要領域の位置情報と、XYステージ37の設定速度に基づき全体制御部48が設定し、偏向器33を制御する。同時に、XYステージ37を管理コンソール49を介して装置ユーザにより設定される移動速度(高速な非同期速度)で高速に移動させる。画像を検出した後は、実施例1と同じ要領で欠陥判定を行えばよい。
【0085】
なお、荷電粒子光学カラムのビーム偏向距離には物理的な限界があり、XYステージの送り速度は、ビームが走査ライン1本を走査する時間にビームの最大偏向幅分だけ移動する速度以上には大きくできない(さもないと走査ラインの位置がビーム偏向により補正できる範囲を超えてしまう)。
【0086】
以上のような制約はあるものの、本実施例の非同期制御手法によれば、ステージ移動速度が高速化されることにより検査不要領域を高速にスキップできるため、従来よりも検査速度が大幅に向上する。
【0087】
具体的な例でいえば、単純なケースとして100ライン分が検査要領域で、隣接する900ラインが検査不要領域で、次の隣接する100ライン分が検査要領域、次の隣接する900ラインが検査不要領域、これが繰り返される場合を想定してみる。ステージ速度を100%の領域が検査要領域である場合の10倍の速度に設定してステージを移動させる。1ラインの画像を取得する時間でステージは10ライン分進むので、9ライン分ビーム走査位置を後ろにずらす。以下同様に、100ライン分繰り返すと、100ライン進む間に900ライン分ビーム走査位置は後ろにずれる。101ライン目は900ライン先であるので、このラインを検出するときにはビーム走査位置は元に戻り、これを繰り返すことで破綻することなく、全ての検査要領域の画像を10倍高速に取得することができることになる。
【0088】
以上、本実施例の検査装置は、実施例1の作用効果に加え、検査スループットを大幅に向上させるという作用効果を実現できる。
【実施例3】
【0089】
本実施例では、検査領域に応じて画素寸法を可変にして検査を行う検査装置について説明する。装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0090】
図4(a)に示されるように、検査対象となるダイの内部には、メモリ領域401,ロジック領域402,周辺回路領域403あるいはダミーパターン領域やパターンの存在しない領域など、パターン密度が異なる複数の領域が存在している。
【0091】
ここで、パターン密度が異なれば、検出したい欠陥サイズも異なる。例えば、パターン密度が高い領域ではパターンとパターンの間隔が平均的に狭いので微細な欠陥でも致命的な欠陥になる。一方、パターン密度が低い領域はパターンとパターンの間隔が平均的に広く、微細な欠陥では特性には影響しない。パターンの存在しない領域やダミーパターンの領域は多少の欠陥があっても致命的ではなく、寧ろ、回路特性に影響を与えない異常が多く存在する可能性すらある。このように、検出すべき欠陥サイズと検査感度は検査対象領域のパターン密度やパターン特性に応じて異なっている。
【0092】
検出欠陥のサイズや検査感度を領域に応じて変えるには、撮像時の画素寸法を領域に応じて変えればよい。このような制御を行うため、本実施例の検査装置の全体制御部48は、上記領域の位置情報と画素寸法との対応関係を記述する管理情報を備えており、二次記憶装置204内に格納されている。また、この管理情報は、装置ユーザが管理コンソール49に表示されるGUI上で画素寸法を指定することにより全体制御部48に入力される。例えば、図4(a)に示されるダイレイアウトをGUI上に表示させ、例えば、メモリ領域401,ロジック領域402,周辺回路領域403あるいはダミーパターン領域や無パターン領域といった領域に対し、検査画素寸法を設定することにより入力を行う。
【0093】
さて、試し検査(ステップ76)の画像検出時あるいは本検査の画像検出時(ステップ78)には、全体制御部48は、ステージ位置と一次荷電粒子線の偏向制御情報から一次荷電粒子線の照射位置の位置情報を把握する。把握したビーム照射位置情報を用いて上記の管理情報を参照し、次にビームを走査あるいは照射すべき位置の画素寸法の情報を取得し、これに基づき算出される偏向速度あるいはサンプリングクロックとなるよう偏向器33あるいはAD変換器45を制御する。画像を検出した後は、実施例1と同じ要領で欠陥判定処理を実行する。
【0094】
本実施例により、設計情報を参照して最適な画素寸法で画像取得するので、パターン毎に必要な欠陥を検出しつつ、高速に画像取得可能な検査装置が実現される。
【0095】
すなわち、本実施例の検査装置は、実施例1の作用効果に加え、検査スループットを大幅に向上させるという作用効果を実現できる。
【実施例4】
【0096】
本実施例では、濃淡画像ではなくパターンの輪郭線を抽出して検査を行う検査装置について説明する。実施例2,3と同様、装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0097】
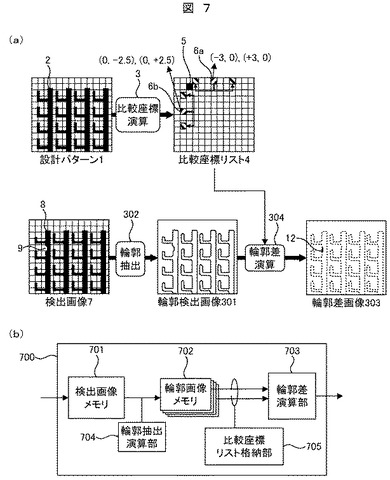
図7(a)には、本実施例の検査の概念図を、図7(b)には、本実施例の検査装置の欠陥判定部47に形成される欠陥検出用機能ブロックを示す。なお、欠陥判定部47のハードウェア構成は図6(a)と同様である。
【0098】
図7(a)において、設計パターン1をメッシュ分割することにより比較座標リスト4生成する処理は図1(a)〜(b)で説明した処理と同様であるので、説明は省略する。
【0099】
検出画像7は、検出画像メモリ701に格納され、輪郭抽出演算部704にて部分画像に切り出される。同時に、輪郭抽出演算部704は部分画像に対して輪郭抽出演算302を施しパターンの輪郭線を抽出して、輪郭画像メモリ702に格納する。輪郭画像メモリは、図4(d)に示されるC1,C2といった検査領域のラベルに応じて複数の部分画像に対応する輪郭情報を格納している。一方、比較座標リスト格納部705には、実施例1と同様の比較座標リストが格納されており、輪郭差演算部703は輪郭画像メモリ702に格納された部分画像の輪郭情報を読出し、比較座標リスト格納部705に格納された比較座標リストを参照して、所定の輪郭画像同士を用いて輪郭差演算304を実行する。輪郭画像に有意な差が存在する場所が欠陥位置と判定される。なお、実施例1と同様、図7(b)に示される欠陥検出用機能ブロックは、メモリ603に格納されたプログラムをプロセッサユニット602が実行することにより実現される。
【0100】
本実施例によると、比較的小さい画素で画像を検出した場合により正確に欠陥検出できる特徴が有る。
【0101】
また、実施例3で説明した検査領域あるいは欠陥の重要度に応じて画素寸法を切り替える欠陥検出手法と組合わせ、画素寸法に応じて濃淡比較と輪郭差比較を切り替えてもよい。このような組合わせ手法によれば、例えば、最も重要な箇所は高感度に、次に重要な箇所は微細画素の濃淡比較,大きな欠陥が問題な場所は大きな画素寸法で検出し、濃淡比較することもできる。本手法においては、欠陥の重要度に応じて画素寸法と欠陥検出アルゴリズムまで変えるため、設定した各重要度の欠陥あるいは検査領域ごとの欠陥検出感度が向上する。また、欠陥検出アルゴリズムに適した画素寸法あるいは画素寸法に応じた欠陥検出アルゴリズムが選択可能となるため、従来法よりも検出可能な欠陥の種類が増大する。
【実施例5】
【0102】
本実施例では、実施例1の変形例として、ゴールデンパターンを用いた検査手法について図8を用いて説明する。以上までの実施例と同様、装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0103】
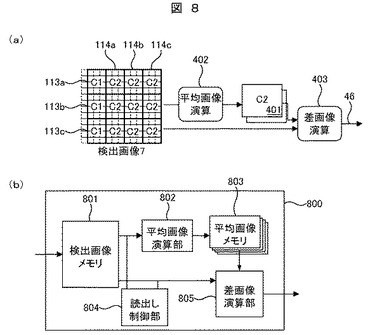
図8(a)は本実施例の検査の概念図を示し、図8(b)は、本実施例の検査装置の欠陥判定部47に形成される欠陥検出用機能ブロックを示す。実施例1あるいは実施例4で説明した比較座標リストの生成処理を設計情報を用いて行い、試し検査あるいは本検査時に図8(a)に示す検出画像7が検出されたものとする。先述の通り、同一のパターンが形成されたはずの座標は複数箇所存在するので、複数箇所の平均画像401に対して平均画像演算処理402を行い、平均画像401と検出画像7の該当部分の画像差について差画像演算処理403を行うことで欠陥46を判定する。
【0104】
図8(b)に示す欠陥検出用機能ブロック800において、検出画像7は、検出画像メモリ701に格納され、読出し制御部804には比較座標リストが格納されている。読出し制御部804は、比較座標リストを参照して検出画像7を部分画像に切り出し、平均画像演算部802および差画像演算部805に出力する。平均画像演算部802は、入力された複数の部分画像を加算平均し、欠陥判定のためのゴールデンパターンとして使用される平均画像を作成する。作成された平均画像は差画像演算部805に出力され、差画像演算部805は、読出し制御部804により読出された部分画像と平均画像に対して差画像演算処理403を施し、欠陥位置を検出する。
【0105】
本実施例によると、部分画像と平均画像とを比較しているので、差が有る部分は欠陥と判定でき、よってリアルゴースト判定が不要である特徴が有る。また、抽出輪郭画像に対して平均処理を実施することもできる。
【実施例6】
【0106】
実施例1の更に変形例を説明する。以上までの実施例と同様、装置の全体構成は実施例1と同様であり、必要に応じて実施例1の図面を引用する。
【0107】
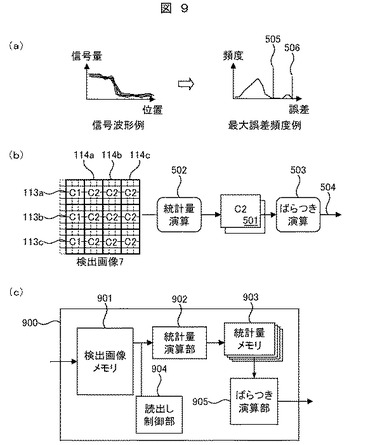
本実施例では、差画像演算に変わって、同一パターン形成領域のパターンのばらつきから欠陥位置を推定する。複数箇所の統計量501を統計量演算502で演算し、統計量501からパターン法線方向に沿ったエッジ位置ばらつき、濃淡ばらつき等のエッジ位置と画像濃淡値のばらつきをばらつき演算部503で演算し、ばらつきの大きいパターンを欠陥パターン504と判定する。例えば、濃淡平均値からの差分として各画像の誤差分布を演算しその最大値を最大誤差とし、最大誤差の頻度分布を演算、予め決めたしきい値505より大きい誤差を持つパターンを欠陥パターンとし、その最大値506をそのパターンのばらつきとし、最大ばらつきの頻度することでばらつきの大きいパターンを欠陥パターン504を判定するものである。本変形によると、各パターン毎の統計的な性質を知ることができるので、ばらつきの大きいパターンを抽出することができる。また、同一の設計パターンでは有るが、パターンを形成する場合に設定するOPCの異なるもの毎に平均値を演算し、平均値の差分を演算することでOPC影響を評価することもできる特徴が有る。
【0108】
以上本実施例によると検査準備時間が短く、1ダイの画像検出のみで欠陥判定のできる高速な回路パターン検査方式とその装置を提供できる。
【符号の説明】
【0109】
1 設計パターン
2,8 メッシュ
3 比較座標演算
4,55 比較座標リスト
5 位置合わせ座標メッシュ
6,53 同一座標リスト
7,619 検出画像
9 欠陥
10,808 差画像演算
11,12 差画像
31 電子銃
32 一次荷電粒子線
33 偏向器
34 対物レンズ
35 帯電制御電極
36 ウェーハ
37 XYステージ
38 Zセンサ
39 試料台
40 二次荷電粒子
41 反射板
42 ExB偏向器
43 検出器
44 ディジタル信号
46 欠陥候補
47 欠陥判定部
48 全体制御部
49 コンソール
50 光学顕微鏡
51 標準試料片
52 比較座標リスト演算プロセッサ
54 同一座標リスト情報
71 同一座標リスト情報作成ステップ
72 同一座標リスト格納ステップ
73 同一座標リスト読込みステップ
74 検査感度設定ステップ
75 比較座標設定ステップ
76 試し検査ステップ
77 検査条件確認ステップ
78 画像検出・欠陥判定ステップ
101 描画データ
102 描画ベクトル
104 上位階層の部品
105 部品ラベル
106 設計情報
111 工程ラベル
112 領域情報
113 ラベルC1の領域
114 ラベルC2の領域
120a,b,c,d,121a,b 同一のラベルを持つパターン
122a,b,c,d スワス
125a,b,c,d 非検査領域
126a,b,c,d 同一スワス内比較領域
127a,b 別スワス比較領域
231 ダイメモリ
301 輪郭検出画像
302 輪郭抽出演算
303 輪郭差画像
304 輪郭差演算
501 統計量
502 統計量演算
503 ばらつき演算部
504 欠陥パターン
505 しきい値
506 最大値
608 位置合わせ座標メモリ
609 位置合わせ部
610 位置合わせ座標
611 部分画像
612 エッジ画像
613 ずれ量分布
616 比較画像記憶部
617 欠陥判定処理部
620 参照画像
621 記憶画像
622 記憶参照画像
806 平均画像
807 平均画像演算
【技術分野】
【0001】
本発明は半導体装置や液晶などの回路パターンを有する基板装置を電子線を利用して検査する検査装置およびその検査方法の技術に関する。
【背景技術】
【0002】
電子線式検査装置は、走査電子顕微鏡で試料の画像を取得し、得られた画像に種々の画像処理を行うことにより欠陥の有無を検査する装置である。検査対象であるウェーハ,マスクあるいは液晶基板などに電子線をスキャンし、発生する二次電子あるいは反射電子をステージ移動に同期して検出する。これにより得られるウェーハ上の回路パターンの二次電子画像を異なる位置のパターンと比較し、差が大きい場所を欠陥として判定する。比較により欠陥が検出できるのは、ウェーハ上に形成される回路パターンが周期性を有しているためであり、比較相手のパターンが隣接ダイの同一箇所であればダイ比較,メモリマット領域内の隣接セルであればセル比較と呼ばれる。
【0003】
また、比較相手のパターンを次々変える比較演算手法の他に、比較相手のパターンをある決まったパターンに固定し、このパターンを参照画像として比較演算対象とする欠陥検出手法もある。参照画像は、ウェーハ上に形成される実パターンの撮像画像の他、回路パターンの設計情報から画像情報を生成し、参照画像として用いてもよい。この場合、設計値との差異の大きいパターンを欠陥として検出していることになる。また、検出された欠陥は、ウェーハ上の分布が統計的に解析され、又は検出した欠陥の形状・特性が詳細に解析され、ウェーハの製造プロセスの制御にフィードバックされる。すなわち、その欠陥が発生したウェーハの製造時の問題点を分析するために使用される。
【0004】
特許文献1には、回路パターンの設計情報から生成された濃淡画像と実際に撮像した画像を比較するダイ・データベース検査方式が開示されている。
【0005】
画像と画像の濃淡情報の比較検査だけではなく、回路パターンの輪郭情報を欠陥検査に用いることもできる。特許第3524853号(特許文献2)には、回路パターンの設計情報から回路パターンの境界情報(エッジ情報)を抽出し、同様に撮像した画像に含まれる回路パターンから輪郭線情報を抽出して、両者を比較する方式の検査装置が記載されている。
【0006】
また、特開2009−194051号公報(特許文献3)には、与えられた複数の撮像箇所の画像を取得し、これらの画像に含まれる同一パターンを積算して参照パターンを生成し、この参照パターンから輪郭線を検出することで生成される平均輪郭画像と、取得画像から生成される輪郭画像とを比較する検査方式が記載されている。
【0007】
また、検査装置とは異なるが、特開2009−283917号公報(特許文献4)には、外観検査装置で検出された欠陥の位置情報を読込み、検出欠陥を高倍率で再撮像する欠陥レビューSEMと呼ばれる欠陥観察装置において、参照画像として使用可能な検出欠陥の近傍の位置情報を回路パターンの設計情報を用いて検出する装置の発明が記載されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平5−258703号公報(米国特許第5502306号)
【特許文献2】特許第3524853号公報(米国特許第6868175号)
【特許文献3】特開2009−194051号公報(米国公開特許2009/0202139)
【特許文献4】特開2009−283917号公報(米国公開特許2009/0268959)
【発明の概要】
【発明が解決しようとする課題】
【0009】
電子線式の外観検査装置あるいは欠陥検査機能を備えた欠陥レビュー装置といった、いわゆる電子線式パターン検査装置においては、複数ダイの検査であっても、1ダイの画像のみを用いて欠陥検査を行うこと、又は1ダイの画像を用いて欠陥検査を行うことが要求される場合がある。例えば、半導体プロセスにおけるフォトマスク(レチクルとも呼ばれる)の場合、試作用レチクルでは通常1つのマスクセットに複数の試作チップの回路が載っているため、1ダイの画像を用いて欠陥検出することが必要となる。また、実ウェーハの検査においても、試作ライン、又は多品種少量生産ラインで流れるウェーハでは、1ショット内に複数の異なるダイが搭載される場合があり、従って1ダイの画像を用いた欠陥検査が必要とされる。
【0010】
また、CPU等の多くのロジックが搭載された品種のウェーハではダイ寸法が大きく、1個のレチクルで1個のダイしか搭載されない場合が有る。EUV露光等でレチクル検査が困難である、又はレチクルへの異物付着を防止するペリクルが装着できない場合、又はOPCで生成されるパターンが期待したものであるかどうかの検証などでは一旦レチクルパターンをウェーハ上に露光し、転写されたパターンの検査を行う必要が有る。これらの場合には、転写パターンが設計どおりにできているかを検証、又はモニタする必要があり、隣接するダイとの比較では目的とする欠陥は検出されないし、セル比較ではメモリマット部検査は可能であるが、メモリマットの周辺部分や周辺回路の検査はできない。これらの場合には、1ダイのみの画像を用いた欠陥検出が必要となる。
【0011】
しかしながら、従来方式の場合、検査準備に時間を要しすぎる、又は検査自体が不可能であるという問題がある。
【0012】
例えば、特許文献1や2に記載されるダイ・データベース比較方式の検査の場合、撮像されるSEM(Scanning Electron Microscope)画像と比較するための画像データを準備する必要があるが、レチクル上に形成されている回路パターンは設計情報そのままではなく、OPC等のパターン変形が施されている。よって、レチクル検査の場合は、パターン変形を考慮したマスク形状のシミュレーション、ウェーハ検査の場合には、マスク変形のシミュレーションに加えて、更にマスクの転写シミュレーション(リソグラフィシミュレーション)、および検出される画像を転写パターンから推定するためのシミュレーションが必要となる。上記シミュレーションに伴う演算量は膨大であり、しかも検出したい欠陥のサイズが微細化すればするほど、変形量の推定は困難となる。特許文献2に記載のエッジ情報を用いた検査方式は、濃淡画像を用いた検査方式よりは演算量は少なくてすむが、上記のシミュレーションを行う必要がある点は同様である。
【0013】
特許文献3に記載の発明では、実画像から平均輪郭線を作成するためシミュレーションは不要となるが、平均輪郭線を作成するため同じパターンの画像を事前に複数枚取得する必要がある。よって、検査対象となる回路パターンが頻繁に変わる、又は、開発時で正常なパターンが入手できない、又はダイ全面に近いパターンを検査する必要があるような状況での検査には向いていない。また、特許文献3によれば、このようなパターンは、隣接チップないし違うウェーハの同一箇所の画像を撮像するか、あるいは同じFOV(Field Of View)内に存在する複数の同一パターンの画素同士を積算することにより得られるが、前者の手法は1つのダイの画像を用いた検査には適用できず、後者の手法は、FOV内に同一パターンが存在しなければ、検査自体が不可能である。
【0014】
特許文献4に記載の発明は欠陥観察装置に関する発明であり、設計情報から参照画像の位置を探索するにあたって、欠陥の位置情報を必要とする。
【0015】
このように、いずれの方式も一長一短があり、検査に要する事前の準備時間が短く、かつ1ダイの画像を用いて、高速に欠陥判定を実行可能な回路パターン検査装置ないし検査方法は実現されていない。本発明は、このような検査を実行可能な回路パターン検査装置ないし検査方法は実現することを目的とする。
【課題を解決するための手段】
【0016】
本発明は、設計上同じパターンとなる筈のダイ内の位置情報を、検査対象となるパターンの設計情報を用いて抽出し、抽出された複数の位置情報のうち少なくとも2箇所の画像を取得し、これら取得画像を用いて欠陥検出を行うことにより上記課題を解決する。欠陥検出手法としては、濃淡情報・輪郭情報のいずれを用いても構わない。
【0017】
言い換えると、本発明は、欠陥検出に必要となる画像の撮像位置を予め決めておきこれに従って画像を取得することにより上記課題を解決する。あるいは、欠陥検出のための比較演算のペアを1チップの設計情報から予め決め、それに従って画像を取得することにより、上記課題を解決する。
【発明の効果】
【0018】
シミュレーションが不要となるため、従来のダイ・データベース検査に比べて、格段に検査準備時間が短縮される。これにより、検査準備時間が短く、1ダイの画像検出で欠陥を判定できる高速な電子線式パターン検査装置ないし検査方法が提供できる。
【図面の簡単な説明】
【0019】
【図1】設計情報を用いて欠陥検出のための比較演算に用いる部分画像のペアを決定するためのアルゴリズムの概念説明図。
【図2】第1の実施例に係る検査装置の全体構成図。
【図3】第1の実施例における検査方法のフローチャート。
【図4】設計情報の階層構造と比較演算ペアの関係を示す概念図。
【図5】ダイレイアウトとスワスレイアウトを示す模式図。
【図6】第1の実施例の検査装置の欠陥判定部のハードウェア構成例と機能ブロックの構成例を示す図。
【図7】第4の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【図8】第5の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【図9】第6の実施例の検査装置に係る欠陥判定方法および欠陥判定処理の機能ブロックを示す図。
【発明を実施するための形態】
【0020】
以下では、各実施例に共通する検査の原理について、図1を用いて説明する。本説明では、半導体ウェーハないし半導体マスクの検査に限定して説明するが、他の被検査試料、例えば半導体デバイス(半導体装置)あるいは液晶などにも適用できることは言うまでもない。
【0021】
図1は、検査対象の設計情報を用いた検査前準備の手順と、検出画像からの欠陥判定方法を示す概念図である。図1(a)に示されるように、GDS2データやOASISなどの設計情報から求められる設計パターン1を仮想的にメッシュ2で分割し、適当な計算機での比較座標演算3により同一のパターンであるはずの位置の座標を各メッシュ毎に抽出し、比較座標リスト4として作成しておく。メッシュサイズは、画像処理の際の処理の切換単位(演算処理の際に一度に処理する画素数)と画素寸法の積によって定まる。画素寸法は、2nm〜30nm、画像処理の切替単位は、32画素角〜1024画素程度が想定され、メッシュサイズの範囲は64nm〜30μm程度である。例えば、画素寸法を10nm、画像処理での処理の切替単位を128画素角とした場合、1.28μmとなる。また、同一のパターンであるはずの判定に当たっては、メッシュの外側にOPCの影響範囲、又は画像に対して支配的な影響力を持つ隣接するパターンまで含めて判定することで、より正確に判定することができる。
【0022】
図1(b)は、図1(a)に示されるメッシュと比較座標リスト4に含まれる同一パターン位置座標の関係を示す概念図である。例えば、メッシュ6aについては、右側および左側に3メッシュ分ずれた位置が同一パターンの位置であり、メッシュ6bについては、上側ないし下側に2.5メッシュ分ずれた位置が同一パターンの形成位置である。比較座標リスト4は、図1(a)に示される各メッシュのIDと、当該IDのメッシュの比較対象の位置情報および位置合わせ用のメッシュ(図1(b)ではメッシュ5)の位置情報を少なくとも含んで構成される。メッシュに分割された各位置の座標とIDとの対応は事前に定めておく。以降の説明では、位置合わせ用メッシュの位置情報(例えば、メッシュ5の位置情報)とあるメッシュIDに対する比較相手の位置情報(例えば、メッシュ6aであれば、(−3,0)(+3,0)などのメッシュ単位のオフセット情報)を総称して、各々「位置合わせ座標リスト」「同一座標リスト」と称し、これらは比較座標リスト4に含まれる。
【0023】
なお、同一座標リストに格納される比較相手の位置情報の様式としては、メッシュを単位としたオフセット情報とメッシュに対するパターンの位置オフセットの2つのオフセット情報が必要であるが、ディジタル画像上の画素単位の相対オフセット座標,設計パターン上の相対座標など、座標情報を直接格納しても構わない。後の2方式は、実質的には最初の方式のメッシュ単位のオフセットとメッシュ内のオフセットを含んでいることになる。
【0024】
図1(c)は、実際に検出されるSEM画像(検出画像7)を示す。撮像された検出画像7を設計パターン1と同様にメッシュ8に分割する。検出画像7には欠陥9を含んでいるとする。以降の説明では、メッシュ分割された検出画像の各メッシュ部分の画像を「部分画像」と称する。検出画像7のうち位置合わせ用のメッシュ5に対応する部分画像を設計パターン1に対して位置合わせし、これにより、各部分画像の座標が確定され、検出画像7から切り出される部分画像の範囲が確定される。なお、位置合わせ用メッシュは位置合わせ量が大きく変化しない範囲に応じて適切な間隔で配置するものとする。また、位置合わせには、帯電などで発生する可能性のある位置ずれ量の範囲内で別のパターンと一致することのないユニークなパターンが必要となる。ただし、同一パターンの抽出範囲内に条件を満足するユニークパターンが存在しない場合には、適当なパターンで一旦位置合わせを行い、同一パターンであるかの判定範囲を小さくし、この条件を満足するユニークなパターンを設定して、複数段で位置合わせをする構成をとることもできる。これが可能と成るのは、位置合わせのされたパターン間は大きくは外れることはないためである。また、位置合わせ用のメッシュは1個のメッシュのみで構成しても複数個のメッシュの組合わせで構成してもよい。
【0025】
部分画像の切り出し範囲が確定すると、比較座標リストに従って、各メッシュIDとその比較相手に相当する部分画像を検出画像から切り出し、差画像演算10を実行して欠陥有無を判定する。欠陥判定に際しては、切り出した部分画像は少なくとも2回以上比較相手に相当する部分画像と比較し、何れも欠陥と判定された場合には欠陥と判定する処理の他、比較相手に相当する部分画像複数箇所の同一パターンからゴールデンパターン(欠陥の無い参照パターン)を生成し、生成したゴールデンパターンと比較する、又は位置合わせ情報の付加情報として予め取得又は演算しておいたゴールデンを持ち、このゴールデンパターンと比較するなど、各種のアルゴリズムを使用可能である。また、差画像演算による欠陥判定を行わずに、検出画像から演算で求めた輪郭線の差分を用いて欠陥判定を行ってもよく、あるいは差画像と輪郭線の差分を演算する方式とを組合わせて欠陥判定を行ってもよい。図1(d)には、差画像演算により欠陥9が差画像12として検出された様子を示す。
【0026】
以上の説明では、説明の容易化のために、1枚の画像(1つのFOVで撮像された画像)を検出画像とし、設計パターンをメッシュで分割したが、メッシュは均一でなくとも、又は重複、抜けがあってもかまわない。つまり、抜けがあってもかまわないとは、パターンが無い場所、回路動作とは無関係のダミーパターン部分、大きな欠陥が有ってもかまわない部位は欠陥判定する必要が無いことを意味している。
【0027】
また、メッシュに跨る箇所に重要な部位が来ないように重複があってもかまわない。更に、検出画像は同一の画素寸法で均質に取得する必要は無く、メッシュ毎に検出画素寸法を指定しておき、動的に画素寸法を変えながら画像取得してもかまわない。更に、画像取得はステージを連続移動しながら動的に画素寸法を変更しながら重要な設計部位の画像を取得する、あるいは検査したい複数のメッシュ,位置合わせメッシュと対応する比較対象のメッシュ部分のみの画像を取得するようにステージをステップアンドリピート方式で画像取得してもかまわない。
【実施例1】
【0028】
以下、本発明による検査方法、及び検査装置の第1の実施例について、図面を参照しながら詳細に説明する。図2は、本実施例の検査装置の構成を示す縦断面図である。
【0029】
本実施例の検査装置は、走査型電子顕微鏡を応用したものであり、主要部は真空容器内に収納されている。これは、半導体ウェーハなどの基板に一次荷電粒子線を照射するためである。本実施例の検査装置は、電子源31で発生した一次荷電粒子線32を試料台39に載置されたウェーハ36に照射し、発生する二次電子または反射電子などの二次荷電粒子40を検出器43で検出して二次荷電粒子信号として信号出力する荷電粒子カラム、上記試料台39をXY面内に移動させるXYステージ37、カラムから出力された二次荷電粒子信号を画像化し、参照画像と比較して信号量に差がある画素を欠陥候補として抽出する欠陥判定部47,上述の荷電粒子カラム,XYステージ37,欠陥判定部47を統括的に制御する全体制御部48などにより構成される。全体制御部48には二次記憶装置204が接続されており、全体制御部48で実行されるソフトウェアや各種の制御情報などが格納されている。XYステージ37や試料台39は、真空試料室内に保持される。
【0030】
ウェーハ36上に一次荷電粒子線32のエネルギーを収束させるために、対物レンズ34で一次荷電粒子線32を細く絞るので、一次荷電粒子線32の直径はウェーハ36上では非常に小さい。一次荷電粒子線32は、偏向器33によりウェーハ36上の所定領域を偏向され、ウェーハ36上を走査される。走査による移動位置と検出器43による二次荷電粒子40の検出タイミングとを同期させることで、二次元の画像を形成することができる。
【0031】
ウェーハ36の表面には様々な材料で構成された各種の回路パターンが形成されており、欠陥を検出しやすくするためにウェーハ36の表面に適当な帯電を形成したい場合がある。本実施例では、ウェーハ36の手前に帯電制御電極35を設け、帯電制御電極35に印加する電位の大きさと極性によりウェーハ36に所望の帯電を形成するようにしている。
【0032】
ウェーハ36の検査の前に、標準試料片51に一次荷電粒子線32を照射して画像化し、一次荷電粒子線照射位置の座標の校正と、焦点の校正を行う。前述のように、一次荷電粒子線32の直径は非常に小さく、また偏向器33による走査幅もウェーハ36の大きさと較べて非常に小さいため、一次荷電粒子線32の走査により一度に取得できる画像の視野は非常に小さい。したがって、検査の前に、ウェーハ36をXYステージ37へ載置したら、光学顕微鏡50による比較的低い拡大倍率の画像でウェーハ36上に設けられた座標校正用のアライメントマークを検出し、XYステージ37を移動させて該アライメントマークが一次荷電粒子線32の下に位置付けるようにして、座標の校正を行う。
【0033】
焦点の校正は、ウェーハ36の高さを計測するZセンサ38により標準試料片51の高さを計測し、次に、ウェーハ36に設けられたアライメントマークの高さを計測し、この計測値を用いて、対物レンズ34で絞られた一次荷電粒子線32の焦点範囲がアライメントマークを含むように、対物レンズ34の励磁強度を調整する。
【0034】
ウェーハ36で発生した二次荷電粒子40をできるだけ多く検出する目的で、ExB偏向器42で反射板41に二次荷電粒子40が多く当るようにし、反射板41で発生した第二の二次電子を検出器43で検出する。
【0035】
全体制御部48は、前述の座標の校正動作,焦点校正動作などを制御する。また、偏向器33に対して制御信号aを送信し、対物レンズに対して励磁電流強度の制御信号bを送信する。また、Zセンサ38から送信されるウェーハ36の高さの計測値cを受信し、XYステージ37を制御する制御信号dをXYステージ37に対して送信する。
【0036】
検出器43から出力された二次荷電粒子信号は、AD変換器45でディジタル信号44に変換される。
【0037】
欠陥判定部47は、ディジタル信号44から画像を生成し、参照画像と比較し、明るさの値に差のある複数の画素を欠陥候補として抽出し、その画像信号と対応するウェーハ36上の座標とを含む欠陥情報信号eを、全体制御部48へ送信する。上記の欠陥情報信号eは信号伝送線205を介して全体制御部48に送信され、また全体制御部48あるいは後述する比較座標リスト演算プロセッサ52で生成された各種の情報も信号伝送線205により欠陥判定部47に伝送される。欠陥候補の判定に際しては、前述の通り各種のアルゴリズムを使用可能であり、輪郭線情報を用いた欠陥判定も可能である。
【0038】
本実施例の検査装置は、コンソール49を備える。コンソール49は、全体制御部48に接続されており、欠陥の画像がコンソール49のスクリーンへ表示されるとともに、全体制御部48は、コンソール49で入力された検査条件fに基づいて、偏向器33の制御信号a,対物レンズの強度の制御信号b,XYステージ37を制御する制御信号dを演算する。また、コンソール49は、上記検査条件を入力するためのキーボードやポインティングデバイス(マウスなど)が備えられており、装置ユーザは、上記スクリーンに表示されるGUI画面に対して、上記キーボード,ポインティングデバイスを操作して、上記の検査条件を入力する。
【0039】
また、本実施例の検査装置は、比較座標リスト演算プロセッサ52を持ち、オペレータがコンソール49から入力した指示に従って、同一のパターンの座標リストである同一座標リスト6と位置合わせ座標リスト5を含む比較座標リスト4を、ウェーハ36に形成されたパターンの設計情報に基づき生成する機能を有している。比較座標リスト演算プロセッサ52は、検査動作とは独立に、検査動作中であっても並列に動作することができる。また、比較座標リスト演算プロセッサ52にも二次記憶装置203が接続されており、比較座標リスト演算プロセッサ52で実行されるソフトウェアや各種の制御情報などが格納されている。
【0040】
検査に先立って、コンソール49からの指示に応じて比較座標リスト演算プロセッサ52で設計情報からパターンの比較座標リスト4の作成を行う。パターンの設計データはCADサーバ201に格納されており、LANなどの通信ネットワーク202を介して全体制御部48に接続されている。
【0041】
検査に先立っては、検査条件と検査手順を決めるレシピ作成を行う。図3(a)(b)(c)には、夫々、比較座標リスト演算を示すフローチャートと、レシピ作成を示すフローチャートと、設定されたレシピに沿って実行される本検査の手順を示すフローチャートを示す。
【0042】
図3(a)において、コンソール49からの指示に応じて、検査対象となるデバイスの配線パターンあるいはマスクパターンの設計情報が読込まれる。半導体デバイスは、通常多数のレイヤの配線パターンが積層されて構成されているため、設計情報読出しの際には、ウェーハIDやプロセスIDなど、製品品種や製造工程(レイヤの識別情報)が参照される。設計情報は、二次記憶装置203ないし204にCADサーバ201から事前に取り込まれているか、あるいは図3(a)のフローを実行する都度CADサーバ201から読出される。
【0043】
比較座標リスト演算プロセッサ52は、読込んだ設計データを比較座標リスト4に変換し(ステップ71)、品種・工程毎に二次記憶装置203に格納する(ステップ72)。
【0044】
次に、図3(a)に示した比較座標リスト情報作成ステップ71について図4を用いて説明する。図4(a)に被検査対象であるダイの模式図を、図4(b)には、図4(a)に示したダイレイアウトに対応する設計情報の論理構成例を、図4(c)には、設計情報上同一のパターンを有する領域のラベル情報と同一パターン形成領域の位置情報との対応を示す概念図を、図4(d)には、同一パターン情報の配列を示す同一パターン配列例を、それぞれ示す。
【0045】
半導体ウェーハ上に形成される回路パターンは、基本的には同じパターンが周期配列されて形成されている。図4(a)の左図に示したダイ400内のレイアウトは、例えばメモリ領域401,ロジック領域402,周辺回路領域403といった複数の領域に分割され、これらの各領域は更に小さな領域に分類される。例えば、メモリ領域401は、図4(a)の中央図に示した複数のメモリマット404というより細かな構成単位に分割することができ、最終的には、図4(a)の右図に示すように、メモリセルを構成するトランジスタのゲート電極や配線といった回路パターンを構成する最小構成単位(リソグラフィ時にウェーハに焼き付けられる描画パターンの一つ一つ)まで分割される。
【0046】
一方、形成されるパターンの周期性から、回路パターンの設計情報は論理的には図4(b)に示すような階層構造で表現することができる。最下位の階層に描画データ101が位置し、複数の描画データ101が纏まってより上位の回路パターンの構成単位を形成する。従って、階層構造の分岐は、下位の構造単位が複数まとまった上位の構成単位に相当する。以降の説明では、階層構造のある分岐より下の枝葉に相当する構成単位を当該構成単位に対する「部品」と称する。描画データは、階層構造の別の場所と同一のデータを共有していることもある。
【0047】
最下層の描画データ101には、ウェーハに形成されるパターンを記述する描画ベクトル102と部品ラベル105が付随している。最下層の描画データから1つ上位の階層の部品104には、C1,C2といった部品名を記述する部品ラベル105と部品を構成するために必要な複数の描画データ101が含まれる。また、部品104の1つ上位の階層の部品には、L0,L1,ロジックといった部品名を記述する部品ラベルおよびこれらを構成する下位の部品ラベルの情報が含まれている。これら複数の階層が積み重ねられて最終的に検査対象の工程に関連する描画ベクトルとして1個の設計情報106が形成されている。
【0048】
以上説明した描画データおよび当該描画データあるいは各階層に付与された部品ラベルの情報は、設計情報の一部としてCADサーバ201に格納されており、前述の通り二次記憶装置203または204に事前に格納されるか、あるいは図3(a)に示した比較座標リスト情報作成ステップ71の実行の都度、CADサーバ201からダウンロードされる。
【0049】
さて、比較座標リスト演算プロセッサ52は、図3(a)のステップ71にて、上述の描画ベクトル、部品ラベルの情報を設計データから読取り、パターンを計算機上で描画し、描画結果に基づき同一パターンの存在する位置情報を求める。同一パターン情報は部品ラベル111a,111b毎にパターンを含む位置座標と寸法を含む領域情報112a,112bを有している。同一の部品ラベルを持つ描画領域は同一のパターンを有しているので、部品ラベル111a,111b毎に対応する描画ベクトル102の描画される領域を演算して、領域情報112a,112bを演算する。求めた同一パターンの位置情報は部品ラベル毎にまとめられ、二次記憶装置203に格納される。
【0050】
図4(c)には、部品ラベルC1,C2に対して、設計データ上同一パターンが存在する領域の領域情報112a,112bが対応付けられて格納される様子を模式的に示した。
【0051】
部品ラベル111a,111bにはレイアウト情報の下位階層近くの小さな領域を含む場合と上位階層近くの大きな領域を含む場合がある。下位階層の場合には、同一ラベルであっても、描画データが異なる場合が有るので、同一パターン情報にするときに別のラベルとして扱うようにする。
【0052】
図4(d)には、図4(c)に示した部品ラベルと領域情報112a,112bのウェーハ上での平面配置関係を表す模式図を示す。ラベルC1の領域113a,113b,113cが縦一列に並び、ラベルC2の領域114a,114b,114cが二次元的に配列している事が判る。また、一般に画像を検出する場合に、設計パターンからずれて検出される。設計情報に基づいて処理をする場合には、位置合わせが必要となる。予想される最大のずれ量内に同一のラベルを持たない、又は同一形状の無い部品ラベルの領域で位置合わせをする必要がある。
【0053】
描画データの展開される領域をメッシュで分割して、メッシュで分割した領域が位置合わせに適した領域であれば、該当するメッシュが位置合わせ用のパターンであるとして、メッシュ座標と、位置合わせ用の描画ベクトル102を合せた位置合わせ座標リスト5とする。また、メッシュで分割した領域と同一のラベルがあるメッシュ位置を少なくとも2個以上登録した同一座標リスト6とする。また、これら同一座標リスト6と位置合わせ座標リスト5を纏めて比較座標リスト4とする。
【0054】
なお、当初想定した同一パターンの抽出範囲内には比較演算ペアが存在しない場合も考えられる。そのような場合には、全体、又は部分的にメッシュサイズを小さくして再度メッシュ分割をやり直す。メッシュサイズが十分小さければ、メッシュ内に存在できるパターンが単純化され、複雑なパターンであっても同一パターンが存在するようになる。もし、メッシュサイズを十分小さくしても同一パターンが存在しないようであれば、そのような領域は検査不可能領域として比較座標リスト4に登録する。又は正常なパターンを予め取得した画像、又は設計情報から擬似的な画像を生成して検査を行う。このような擬似的な画像を用いる場合、生成誤差を配慮する必要があるため、欠陥検出条件(欠陥検出のしきい値など)を低感度に設定する。
【0055】
図3(b)には、本実施例の検査方法におけるレシピ設定手順を示すフローチャートを示した。図3(b)において、はじめに、全体制御部48が予め作成され記憶されている標準レシピを読込む。同時に、検査対象であるウェーハ36が検査装置へロードされ、同時に比較座標リスト4を読込む(ステップ73)。全体制御部48は、標準レシピの読込み処理と、ウェーハ36のロードとを、オペレータがコンソール49により入力する指令を契機として開始する。ロードされたウェーハ36は、試料台39に搭載される。次に、全体制御部48は、読込んだ標準レシピに基づいて、電子源31へ印加される電圧、対物レンズ34の励磁強度,帯電制御電極35へ印加される電圧,偏向器33へ印加される電流などの光学系条件を設定し、標準試料片51の画像に基づき、ウェーハ36のアライメントマークを基準とした座標と検査装置のXYステージ37の座標との間の補正を求めるアライメント条件を設定し、ウェーハ36の中の検査対象とする領域を示す検査領域情報を設定し、画像の光量を調整するための画像を取得する座標と検出器43の初期ゲインを登録するキャリブレーション条件を設定する。次に、検査感度を設定し(ステップ74)、比較座標設定(ステップ75)を行う。
【0056】
ここで、読込んだ同一座標リスト6では、同一階層で1箇所の座標につき複数箇所の比較候補が有る。また、ある階層のある検査座標に対する比較候補パターンが、異なる階層(上位または下位の階層)に存在する場合が有る。以下では、どの比較候補と比較するかを図5を用いて説明する。
【0057】
図5(a)はダイ内のレイアウト全体を、図5(b)は図5(a)に示したスワス122aおよび122bのレイアウトを拡大して示している。ここで、“スワス”とは、ステージ連続移動方式の検査装置で取得される画像を意味し、ステージを連続で移動させながら当該ステージの移動方向と交差する方向に電子ビームを偏向して二次荷電粒子信号を検出することにより取得される。よって、全体制御部48はXYステージ37に対し、X方向又はY方向をステージの移動方向の入力情報として与える。例えば移動方向をX方向とした場合、1回のステージスキャンで取得されるのはスワス122a〜122dとなる。そこで、ステージ移動方向に垂直なY方向に同一の座標を有している比較候補を優先して比較候補を選定する。120a,120bは同一の部品ラベル105を持つ領域であるので、これらが比較対象に選定される。
【0058】
領域121aは同一なラベルを有する領域が同一スワス内に無く、121bと比較することになる。従って、スワスレイアウト上では、左から順にパターンが無く検査の不要な非検査領域125a,比較対象が同一スワス内に有る同一スワス内比較領域126a,別のスワスと比較する別スワス比較領域127a、以下同様な領域が配置される。
【0059】
次にスワスを設計情報と同一のメッシュに分割し、分割した各メッシュ毎に、比較座標リスト6と、場合によっては位置合わせ座標リスト5を纏めて比較座標リスト4とし、レシピの内部に保持するデータとして欠陥判定部47を制御する欠陥判定制御部600の二次記憶装置に記憶しておく。また、スワス間を跨る比較では後で説明するが、一旦検出した画像を退避しておいて比較対象の画像を検出したときに退避した画像と比較することになるので、スワスの走査順は退避量が最小となるようにスケジューリングすることが望ましい。
【0060】
次に、試し検査(ステップ76)について図6を用いて説明する。図6(a)は、図2に示した欠陥判定部47のハードウェア構成図、図6(b)は欠陥判定部47で実行される位置合わせ処理の詳細を示すブロック図、図6(c)は欠陥判定部47で実行される欠陥判定処理の詳細を示すブロック図を示す。
【0061】
欠陥判定部47は、ハードウェア上は、複数のCPUコアからなるプロセッサユニット602,画像メモリ603および入出力インタフェース604を備えた1Uの画像処理基板601および全体を制御する欠陥判定制御部600が実装された情報処理基板が、それぞれバックプレーンに挿入された構成を有する。欠陥判定部47に入力される画像信号は、バックプレーン側に設けられた入力インタフェース605を介して上記複数の画像処理基板に分配される。バックプレーンはSRIO等の高速バスの場合、又はインフィニバンド、10GLANで代表される高速ネットワーク構成の場合がある。画像処理基板601上に実装されたメモリ603のメモリ空間上には二次記憶装置203に格納されたプログラムが展開されており、これをプロセッサユニット602が実行することにより、図6(b)に示される位置合わせ用機能ブロック606あるいは図6(c)に示される欠陥判定用機能ブロック614が実現される。なお、図6(a)では、欠陥判定部600は、専用の処理チップを設ける実装形態を示しているが、欠陥判定部600の機能をソフトウェアにより実現してもよい。この場合、バックプレーンに挿入された複数の情報処理基板のいずれか一つのメモリに欠陥判定部600の機能を実現するプログラムが格納されることになる。
【0062】
次に、図6(b)を用いて位置合わせ処理について説明する。
【0063】
まず、図3(b)のステップ76の実行前に、全体を制御する欠陥判定制御部600に格納された同一座標リスト6、及び位置合わせの座標と対応する描画ベクトルより展開した画素単位のエッジ画像情報より成る位置合わせ座標リスト5が読込まれる。
【0064】
次に、全体制御部48よりの指令でXYステージ37を駆動し、駆動したXYステージ37の駆動に同期して、偏向器33を走査することで、一次荷電粒子線32をラスタスキャンの要領でウェーハ36を走査,発生する二次電子を検出器43で検出、AD変換器45でディジタル信号44に変換し欠陥判定部47に送る。欠陥判定部47では入力IF605経由で画像信号を受信し、ディジタル信号44として、ダイメモリ607に格納する。実際のハードウェアでは、ダイメモリ607は複数枚の画像処理基板601上のメモリ602で構成されている。1回のステージ走査で取得する画像を画像処理基板601の枚数で分割し、分割した画像を各画像処理基板601のメモリ602に順番に格納する。予め、又は画像の格納と同時に、欠陥判定制御部600に格納してある比較座標リスト4中の位置合わせ座標リスト5を対応する画像処理基板601に分配し、メモリ603に合わせて格納する。
【0065】
以上の制御により、ステップ76の実行時には、AD変換器45から出力されるディジタル信号44のうち検査すべき領域の信号(図5の126a〜d、及び127a,b)が複数枚で構成されたダイメモリ607に記憶される。
【0066】
試し検査の際に行われる位置合わせ処理は以下の手順で行う。
(1)欠陥判定制御部600よりの指令で、位置合わせ座標リスト5の座標データを参照して、ダイメモリ607より切り出したメッシュの部分画像611、及び位置合わせ座標リスト5のエッジ画像612を位置合わせ部609に送信する。位置合わせ部609は実際のハードウェアではプロセッサユニット602で構成されているので、画像処理基板601の制御部(図には示していない)が、位置合わせ座標リスト5の座標データを参照して、メモリ603より部分画像611読出し、位置合わせ座標リスト5と共に、プロセッサユニット602のCPUコアに送信することになる。CPUコアは、部分画像611より抽出したエッジ情報と位置合わせ座標リスト5中のエッジ画像612を位置合わせして、位置合わせ結果及び位置合わせ座標リスト5中の座標データのペアである位置合わせ結果613を欠陥判定制御部600に送信する。
(2)欠陥判定制御部600では送信された位置合わせ結果613に基づき、スワス全体のずれ量分布を決定し、ダイメモリ607に座標の補正量として格納する。ダイメモリ607のハードウェアはメモリ603であるので、対応する画像処理基板601に分割して格納することになる。
【0067】
これらの動作により、設計情報のメッシュに対応する画像の座標が確定する。因みに、ずれ量分布を欠陥判定制御部600で演算する構成で説明したが、画像処理基板601に分配された領域内のみでずれ量分布を演算する構成でもかまわない。また、位置合わせは、2段階で行うこともできる。即ち、ずれ量は可能性のあるずれ範囲内で一意に位置合わせができる必要がある。しかし、パターンに該当する場所が無い場合には、一意に決まる点でずれ量分布を求めた後、その中間地点ではほぼ線形で補間したずれ量に近いずれ量になることが予想されることを利用して、狭い範囲でずれ量を計測することで、正確な分布を不利なパターンであっても求めるものである。
【0068】
次に、図6(c)を用いて欠陥判定処理について説明する。
【0069】
欠陥判定部614の論理構成はダイメモリ615、及びダイメモリ615の読出しを制御する読出し制御部618、及び同一のスワスに比較すべき画像が無い場合に、ダイメモリ615の画像621を保持しておく比較画像記憶部616、及びダイメモリ615より読出した検出画像619と参照画像620又は一旦比較画像記憶部616に記憶された以前のスワスの記憶参照画像622と検出画像619を比較して差がある部分を欠陥候補46として判定する欠陥判定処理部617で構成される。ハードウェアは、以下の対応となる。ダイメモリ615はメモリ603、読出し制御部618は画像処理基板制御部(非表示)、比較画像記憶部はメモリ603、欠陥判定処理部617はプロセッシングユニット602である。
【0070】
位置合わせが終了すると、欠陥判定制御部600よりの指示で、同一座標リスト6を参照して、読出し制御部618にメッシュで分割されたダイメモリ内の画像毎に、比較画像記憶部616に記憶する、検出画像とする、又は参照画像とすることを決める。また、同一座標リスト6を参照して、欠陥判定処理部617は検出画像619を記憶参照画像622、又は参照画像620の何れと比較するかを決定し、いずれかと比較して差がある部分を欠陥候補46として判定し、欠陥判定制御部600に送信する。欠陥候補46には検出画像の座標,参照又は記憶参照画像の座標,欠陥の特徴量の情報が含まれている。
【0071】
少なくとも1箇所のメッシュに分割された画像に対しては2箇所の参照画像、又は1箇所の参照画像と別メッシュの検出画像からの参照指定、又は2箇所の別メッシュの検出画像よりの参照画像としての指定が同一座標リスト6に指定しておく。これにより、検出画像であるか、参照画像であるか、記憶参照画像であるかは別にして少なくとも2回比較が行われることになる。無論、ダイメモリ615は複数の画像処理基板601のダイメモリ603で構成されているので、同一の画像処理基板のメモリに参照画像が無い場合もあるので、バックプレーンを介して該当する画像を取得することになる。
【0072】
欠陥判定制御部600では欠陥候補46の検出画像の座標、及び参照又は記憶参照画像の座標の2個を欠陥候補の座標として集計し、同一の座標点が2回以上表れた場合、真の欠陥として判定する。
【0073】
次に検査条件確認(ステップ77)の動作を説明する。検出された欠陥部の画像を再度高解像度で検出した、又は欠陥判定に用いた画像で本来の欠陥であるかどうかを確認し、問題なければ正しい条件が設定されたとし、問題が有る場合には検査感度条件から設定をし直す物である。正しい条件出しができた場合にはレシピを保存し、ウェーハをアンロードして終了する。
【0074】
次に、図3(c)に示す本検査の手順について説明する。比較座標リストを含むレシピを読込み、ウェーハをロード、光学条件などを設定し、アライメントマークに対して位置合わせ、信号量を最適とするキャリブレーションを行う。キャリブレーションの実行後、図3(b)と同じ要領で比較座標を設定(ステップ75)し、指定された順でスワスの画像を検出する。更に、図3(b)のステップ77で説明した試し検査と同一の手順で欠陥判定する(ステップ78)。検査結果の欠陥情報を結果保存し、ウェーハをアンロードして終了する。
【0075】
以上のように、本実施例の欠陥検査装置は設計情報のパターン情報を位置合わせのみに用い、欠陥判定には用いていないので、検出パターンを推定するシミュレーションやパターン変形などの処理が不要であり、前処理時間が短くてすむ。また、シミュレーションやパターン変形などの計算処理に起因するパターン推定誤差が無く、よって高感度な欠陥検出が可能である。また、図5に示すように、取得したスワス画像のうち、無パターン部分やダミーパターンといった検査が不要な領域を設計情報に基づき非検査領域に設定し、その部分に関する比較演算処理は行わないため、本質的な欠陥のみを抽出できる。更にまた、設計情報を参照して同一である領域のパターン同士の濃淡画像を比較しているため、比較的大きな画素寸法であっても画素寸法と同等以下の微細な欠陥を高感度に欠陥判定ができる特徴がある。
【0076】
以上、本実施例の欠陥検査装置により、検査準備時間が短く、1ダイの画像検出で欠陥を判定できる高速な電子線式パターン検査装置ないし検査方法を提供することが可能となる。なお、以上の説明では、ステージ連続移動方式の検査装置を例として説明を行ったが、本実施例の構成がステップアンドリピート方式の検査装置に対しても適用できることは言うまでも無い。
【実施例2】
【0077】
本実施例では、ステージ移動を一次荷電粒子線の偏向速度とは非同期で実行する検査装置について説明する。装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0078】
図5で説明したように、検査対象となる試料には、無パターン部分やダミーパターンといった検査が不要な領域(例えば、領域125a〜125dなど)が存在する。このような検査の不要な非検査領域125は検査が不要であるのみならず、画像検出も不要である。ところがステージ連続移動方式の検査装置の場合、検査不要領域に対してビーム照射を行わないだけでは、検査スループットは向上しない。
【0079】
理論的には、1ラインの画像取得に要する時間はクロック,ライン当たりの画素数を変えなければ、一定である。ステージを移動しながら、ダイ全面の画像を取得するのに要するライン数をD本とし、これに要する時間をT秒とする。画像取得をするライン数が100%の場合にはT秒、10%の場合、0.1T秒の時間で済むように動作させることができるはずである。しかし、ステージ移動速度を100%と同一とした場合には、画像取得は10%であってもT秒かかってしまう。
【0080】
ステージ連続移動方式の検査装置の場合、単位時間あたりの撮像面積はステージの送り速度と一次荷電粒子線の偏向速度(偏向周波数)により定まる。ブランキングなどのビーム遮蔽手段により、検査不要領域へのビーム照射をオフしたとしても、その間、検出器からは画像信号は出力されず、スワスに画像の空白領域が形成されるだけである。つまり、単純に検査不要領域へのビーム照射をやめるだけでは検査スループットは向上せず、検査要領域がビーム照射位置あるいは荷電粒子カラムのFOV内に移動してくるまでの待ち時間をいかに低減できるかが検査高速化のカギとなる。従って、XYステージの送り速度を高速化することにより、検査スループットを向上できる。
【0081】
従来、ステージ連続移動方式の検査装置の場合、XYステージの送り速度は、スワス画像を構成する走査ライン1本を一次荷電粒子線が走査する時間の間に(XYステージが)走査ラインと交差する方向に1画素分だけ移動する速度(以下、同期速度と称する)に設定されており、ステージの高速化は困難であった。
【0082】
そこで、ステージ移動速度を一次荷電粒子線の偏向速度と非同期に、つまり、走査ライン1本のビーム偏向時間の間に移動するステージの距離が1画素分以上となるようにXYステージを制御条件を設定することにより、従来よりも単位時間あたりの撮像面積(検査不要領域を含む)を増大できる。
【0083】
非同期制御の場合、何もしなければ、一次荷電粒子線の走査ラインは本来走査すべき位置からステージの進行方向側にシフトしていくことになる。そこで、ステージ移動に対するビーム偏向位置の遅れをステージ移動方向と同じ方向へのビーム偏向により補正する。これにより、XYステージを非同期で動作させても正しい撮像位置の画像検出が可能となる。
【0084】
走査ラインのずれを補正するためのビーム偏向量は、図5(b)に示されるスワスレイアウト内の検査要領域と検査不要領域の位置情報と、XYステージ37の設定速度に基づき全体制御部48が設定し、偏向器33を制御する。同時に、XYステージ37を管理コンソール49を介して装置ユーザにより設定される移動速度(高速な非同期速度)で高速に移動させる。画像を検出した後は、実施例1と同じ要領で欠陥判定を行えばよい。
【0085】
なお、荷電粒子光学カラムのビーム偏向距離には物理的な限界があり、XYステージの送り速度は、ビームが走査ライン1本を走査する時間にビームの最大偏向幅分だけ移動する速度以上には大きくできない(さもないと走査ラインの位置がビーム偏向により補正できる範囲を超えてしまう)。
【0086】
以上のような制約はあるものの、本実施例の非同期制御手法によれば、ステージ移動速度が高速化されることにより検査不要領域を高速にスキップできるため、従来よりも検査速度が大幅に向上する。
【0087】
具体的な例でいえば、単純なケースとして100ライン分が検査要領域で、隣接する900ラインが検査不要領域で、次の隣接する100ライン分が検査要領域、次の隣接する900ラインが検査不要領域、これが繰り返される場合を想定してみる。ステージ速度を100%の領域が検査要領域である場合の10倍の速度に設定してステージを移動させる。1ラインの画像を取得する時間でステージは10ライン分進むので、9ライン分ビーム走査位置を後ろにずらす。以下同様に、100ライン分繰り返すと、100ライン進む間に900ライン分ビーム走査位置は後ろにずれる。101ライン目は900ライン先であるので、このラインを検出するときにはビーム走査位置は元に戻り、これを繰り返すことで破綻することなく、全ての検査要領域の画像を10倍高速に取得することができることになる。
【0088】
以上、本実施例の検査装置は、実施例1の作用効果に加え、検査スループットを大幅に向上させるという作用効果を実現できる。
【実施例3】
【0089】
本実施例では、検査領域に応じて画素寸法を可変にして検査を行う検査装置について説明する。装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0090】
図4(a)に示されるように、検査対象となるダイの内部には、メモリ領域401,ロジック領域402,周辺回路領域403あるいはダミーパターン領域やパターンの存在しない領域など、パターン密度が異なる複数の領域が存在している。
【0091】
ここで、パターン密度が異なれば、検出したい欠陥サイズも異なる。例えば、パターン密度が高い領域ではパターンとパターンの間隔が平均的に狭いので微細な欠陥でも致命的な欠陥になる。一方、パターン密度が低い領域はパターンとパターンの間隔が平均的に広く、微細な欠陥では特性には影響しない。パターンの存在しない領域やダミーパターンの領域は多少の欠陥があっても致命的ではなく、寧ろ、回路特性に影響を与えない異常が多く存在する可能性すらある。このように、検出すべき欠陥サイズと検査感度は検査対象領域のパターン密度やパターン特性に応じて異なっている。
【0092】
検出欠陥のサイズや検査感度を領域に応じて変えるには、撮像時の画素寸法を領域に応じて変えればよい。このような制御を行うため、本実施例の検査装置の全体制御部48は、上記領域の位置情報と画素寸法との対応関係を記述する管理情報を備えており、二次記憶装置204内に格納されている。また、この管理情報は、装置ユーザが管理コンソール49に表示されるGUI上で画素寸法を指定することにより全体制御部48に入力される。例えば、図4(a)に示されるダイレイアウトをGUI上に表示させ、例えば、メモリ領域401,ロジック領域402,周辺回路領域403あるいはダミーパターン領域や無パターン領域といった領域に対し、検査画素寸法を設定することにより入力を行う。
【0093】
さて、試し検査(ステップ76)の画像検出時あるいは本検査の画像検出時(ステップ78)には、全体制御部48は、ステージ位置と一次荷電粒子線の偏向制御情報から一次荷電粒子線の照射位置の位置情報を把握する。把握したビーム照射位置情報を用いて上記の管理情報を参照し、次にビームを走査あるいは照射すべき位置の画素寸法の情報を取得し、これに基づき算出される偏向速度あるいはサンプリングクロックとなるよう偏向器33あるいはAD変換器45を制御する。画像を検出した後は、実施例1と同じ要領で欠陥判定処理を実行する。
【0094】
本実施例により、設計情報を参照して最適な画素寸法で画像取得するので、パターン毎に必要な欠陥を検出しつつ、高速に画像取得可能な検査装置が実現される。
【0095】
すなわち、本実施例の検査装置は、実施例1の作用効果に加え、検査スループットを大幅に向上させるという作用効果を実現できる。
【実施例4】
【0096】
本実施例では、濃淡画像ではなくパターンの輪郭線を抽出して検査を行う検査装置について説明する。実施例2,3と同様、装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0097】
図7(a)には、本実施例の検査の概念図を、図7(b)には、本実施例の検査装置の欠陥判定部47に形成される欠陥検出用機能ブロックを示す。なお、欠陥判定部47のハードウェア構成は図6(a)と同様である。
【0098】
図7(a)において、設計パターン1をメッシュ分割することにより比較座標リスト4生成する処理は図1(a)〜(b)で説明した処理と同様であるので、説明は省略する。
【0099】
検出画像7は、検出画像メモリ701に格納され、輪郭抽出演算部704にて部分画像に切り出される。同時に、輪郭抽出演算部704は部分画像に対して輪郭抽出演算302を施しパターンの輪郭線を抽出して、輪郭画像メモリ702に格納する。輪郭画像メモリは、図4(d)に示されるC1,C2といった検査領域のラベルに応じて複数の部分画像に対応する輪郭情報を格納している。一方、比較座標リスト格納部705には、実施例1と同様の比較座標リストが格納されており、輪郭差演算部703は輪郭画像メモリ702に格納された部分画像の輪郭情報を読出し、比較座標リスト格納部705に格納された比較座標リストを参照して、所定の輪郭画像同士を用いて輪郭差演算304を実行する。輪郭画像に有意な差が存在する場所が欠陥位置と判定される。なお、実施例1と同様、図7(b)に示される欠陥検出用機能ブロックは、メモリ603に格納されたプログラムをプロセッサユニット602が実行することにより実現される。
【0100】
本実施例によると、比較的小さい画素で画像を検出した場合により正確に欠陥検出できる特徴が有る。
【0101】
また、実施例3で説明した検査領域あるいは欠陥の重要度に応じて画素寸法を切り替える欠陥検出手法と組合わせ、画素寸法に応じて濃淡比較と輪郭差比較を切り替えてもよい。このような組合わせ手法によれば、例えば、最も重要な箇所は高感度に、次に重要な箇所は微細画素の濃淡比較,大きな欠陥が問題な場所は大きな画素寸法で検出し、濃淡比較することもできる。本手法においては、欠陥の重要度に応じて画素寸法と欠陥検出アルゴリズムまで変えるため、設定した各重要度の欠陥あるいは検査領域ごとの欠陥検出感度が向上する。また、欠陥検出アルゴリズムに適した画素寸法あるいは画素寸法に応じた欠陥検出アルゴリズムが選択可能となるため、従来法よりも検出可能な欠陥の種類が増大する。
【実施例5】
【0102】
本実施例では、実施例1の変形例として、ゴールデンパターンを用いた検査手法について図8を用いて説明する。以上までの実施例と同様、装置の全体構成は実施例1と同様であるので、必要に応じて実施例1の図面を引用する。
【0103】
図8(a)は本実施例の検査の概念図を示し、図8(b)は、本実施例の検査装置の欠陥判定部47に形成される欠陥検出用機能ブロックを示す。実施例1あるいは実施例4で説明した比較座標リストの生成処理を設計情報を用いて行い、試し検査あるいは本検査時に図8(a)に示す検出画像7が検出されたものとする。先述の通り、同一のパターンが形成されたはずの座標は複数箇所存在するので、複数箇所の平均画像401に対して平均画像演算処理402を行い、平均画像401と検出画像7の該当部分の画像差について差画像演算処理403を行うことで欠陥46を判定する。
【0104】
図8(b)に示す欠陥検出用機能ブロック800において、検出画像7は、検出画像メモリ701に格納され、読出し制御部804には比較座標リストが格納されている。読出し制御部804は、比較座標リストを参照して検出画像7を部分画像に切り出し、平均画像演算部802および差画像演算部805に出力する。平均画像演算部802は、入力された複数の部分画像を加算平均し、欠陥判定のためのゴールデンパターンとして使用される平均画像を作成する。作成された平均画像は差画像演算部805に出力され、差画像演算部805は、読出し制御部804により読出された部分画像と平均画像に対して差画像演算処理403を施し、欠陥位置を検出する。
【0105】
本実施例によると、部分画像と平均画像とを比較しているので、差が有る部分は欠陥と判定でき、よってリアルゴースト判定が不要である特徴が有る。また、抽出輪郭画像に対して平均処理を実施することもできる。
【実施例6】
【0106】
実施例1の更に変形例を説明する。以上までの実施例と同様、装置の全体構成は実施例1と同様であり、必要に応じて実施例1の図面を引用する。
【0107】
本実施例では、差画像演算に変わって、同一パターン形成領域のパターンのばらつきから欠陥位置を推定する。複数箇所の統計量501を統計量演算502で演算し、統計量501からパターン法線方向に沿ったエッジ位置ばらつき、濃淡ばらつき等のエッジ位置と画像濃淡値のばらつきをばらつき演算部503で演算し、ばらつきの大きいパターンを欠陥パターン504と判定する。例えば、濃淡平均値からの差分として各画像の誤差分布を演算しその最大値を最大誤差とし、最大誤差の頻度分布を演算、予め決めたしきい値505より大きい誤差を持つパターンを欠陥パターンとし、その最大値506をそのパターンのばらつきとし、最大ばらつきの頻度することでばらつきの大きいパターンを欠陥パターン504を判定するものである。本変形によると、各パターン毎の統計的な性質を知ることができるので、ばらつきの大きいパターンを抽出することができる。また、同一の設計パターンでは有るが、パターンを形成する場合に設定するOPCの異なるもの毎に平均値を演算し、平均値の差分を演算することでOPC影響を評価することもできる特徴が有る。
【0108】
以上本実施例によると検査準備時間が短く、1ダイの画像検出のみで欠陥判定のできる高速な回路パターン検査方式とその装置を提供できる。
【符号の説明】
【0109】
1 設計パターン
2,8 メッシュ
3 比較座標演算
4,55 比較座標リスト
5 位置合わせ座標メッシュ
6,53 同一座標リスト
7,619 検出画像
9 欠陥
10,808 差画像演算
11,12 差画像
31 電子銃
32 一次荷電粒子線
33 偏向器
34 対物レンズ
35 帯電制御電極
36 ウェーハ
37 XYステージ
38 Zセンサ
39 試料台
40 二次荷電粒子
41 反射板
42 ExB偏向器
43 検出器
44 ディジタル信号
46 欠陥候補
47 欠陥判定部
48 全体制御部
49 コンソール
50 光学顕微鏡
51 標準試料片
52 比較座標リスト演算プロセッサ
54 同一座標リスト情報
71 同一座標リスト情報作成ステップ
72 同一座標リスト格納ステップ
73 同一座標リスト読込みステップ
74 検査感度設定ステップ
75 比較座標設定ステップ
76 試し検査ステップ
77 検査条件確認ステップ
78 画像検出・欠陥判定ステップ
101 描画データ
102 描画ベクトル
104 上位階層の部品
105 部品ラベル
106 設計情報
111 工程ラベル
112 領域情報
113 ラベルC1の領域
114 ラベルC2の領域
120a,b,c,d,121a,b 同一のラベルを持つパターン
122a,b,c,d スワス
125a,b,c,d 非検査領域
126a,b,c,d 同一スワス内比較領域
127a,b 別スワス比較領域
231 ダイメモリ
301 輪郭検出画像
302 輪郭抽出演算
303 輪郭差画像
304 輪郭差演算
501 統計量
502 統計量演算
503 ばらつき演算部
504 欠陥パターン
505 しきい値
506 最大値
608 位置合わせ座標メモリ
609 位置合わせ部
610 位置合わせ座標
611 部分画像
612 エッジ画像
613 ずれ量分布
616 比較画像記憶部
617 欠陥判定処理部
620 参照画像
621 記憶画像
622 記憶参照画像
806 平均画像
807 平均画像演算
【特許請求の範囲】
【請求項1】
複数のダイが形成された半導体ウェーハについて、当該ダイ中に形成された少なくとも2つの回路パターンの画像を比較演算することにより欠陥を検査する検査装置において、
前記被検査試料に一次荷電粒子線を照射し、得られる二次電子または反射電子に基づく検出信号を出力する荷電粒子光学カラムと、
前記ダイの設計情報を用いて、当該ダイ中に形成された回路パターンのうち形状が同一な部分の位置情報を複数抽出し、前記比較演算に使用する画像の撮像領域を決定する演算プロセッサとを備え、
前記演算プロセッサにより決定された取得領域の画像を撮像し、当該画像を用いて前記欠陥の検査を行うことを特徴とする検査装置。
【請求項2】
請求項1に記載の検査装置において、
前記形状が同一な部分の位置情報を1つのダイ内に形成された回路パターンから抽出し、
当該1のダイの画像のみを使用して前記欠陥の検査を行うことを特徴とする検査装置。
【請求項3】
所定パターンが形成された被検査試料の欠陥を検査する検査装置において、
前記被検査試料に一次荷電粒子線を照射し、得られる二次電子または反射電子に基づく検出信号を出力する荷電粒子光学カラムと、
前記検出信号から生成される画像信号を用いて前記欠陥の有無を判定する欠陥判定部と、
前記所定パターンの設計情報を用いて、前記パターンのうち形状が同一な部分の位置情報を複数抽出する演算プロセッサとを備え、
前記欠陥判定部は、
前記画像信号から前記複数の位置情報に対応する複数の部分画像を取得し、
当該複数の部分画像のうち任意の2つの画像を比較することにより欠陥の有無を判定することを特徴とする検査装置。
【請求項4】
請求項3に記載の検査装置において、
前記欠陥判定部は、
与えられた基準位置に対する前記設計情報から生成される前記パターンの画像と、当該基準位置の画像とを比較することにより、前記部分画像を前記パターンから切り出す基準位置の補正量を計算し、
当該補正量により前記基準位置を補正して前記部分画像を取得することを特徴とする検査装置。
【請求項5】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に対してパターンの輪郭線抽出を行い、
当該生成された複数の輪郭線画像のうち任意の2つの輪郭線画像を比較して欠陥検査を行うことを特徴とする検査装置。
【請求項6】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像を加算平均して参照画像を生成し、
当該参照画像と前記複数の部分画像のうちの1の部分画像との差画像を形成して欠陥検査を行うことを特徴とする検査装置。
【請求項7】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に対し、パターンのエッジ位置のばらつき,コントラストのばらつき、または輝度のばらつきのいずれかを計算し、
前記ばらつきの平均値からの乖離が大きなパターンを欠陥と判定することを特徴とする検査装置。
【請求項8】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に含まれる第1の部分画像と第2の部分画像とを比較し、
更に前記第1の部分画像と、前記第2の部分画像とは異なる第3の部分画像とを比較し、
前記2つの比較結果を用いて、前記第1の部分画像に欠陥が存在するか否かを判定することを特徴とする検査装置。
【請求項9】
請求項3に記載の検査装置において、
前記荷電粒子光学カラムの画像取得条件を制御する制御ユニットを備え、
当該制御ユニットは、
与えられた領域情報に基づき、前記被検査試料上の所定領域毎に画素寸法を変えて画像を取得するよう荷電粒子光学カラムを制御することを特徴とする検査装置。
【請求項10】
請求項9に記載の検査装置において、
前記欠陥判定部は、
画像比較による検査と輪郭線画像の比較による検査を、前記所定領域または前記画素寸法に応じて切替えることを特徴とする検査装置。
【請求項11】
請求項9に記載の検査装置において、
前記欠陥判定部は、
前記所定領域または前記画素寸法に応じて、検査感度を変えることを特徴とする検査装置。
【請求項12】
請求項3に記載の検査装置において、
前記演算プロセッサは、
予め与えられた検査の非実行領域の情報を用い、当該検査の非実行領域を避けて前記形状が同一な部分の位置情報を抽出することを特徴とする検査装置。
【請求項13】
請求項12に記載の検査装置において、
前記検査の非実行領域は、前記被検査試料上におけるパターンの無い領域,ダミーパターン領域,欠陥があっても品質に影響の無い領域のいずれかであることを特徴とする検査装置。
【請求項14】
請求項3に記載の検査装置において、
前記演算プロセッサは、
前記設計情報から生成されるパターンの画像をメッシュ分割し、当該メッシュ毎に前記形状が同一な部分を規定することを特徴とする検査装置。
【請求項15】
請求項3に記載の検査装置において、
前記被検査試料を所定方向に移動させる試料ステージと、
前記被検査試料上で、前記一次荷電粒子線が前記試料ステージの移動方向とは交差する方向に走査させることで、前記画像信号としてスワスの画像信号を出力するよう前記荷電粒子光学カラムを制御する荷電粒子光学カラム制御部とを備え、
前記欠陥判定部は、前記スワスの画像信号から前記複数の部分画像を取得して欠陥の有無を判定することを特徴とする検査装置。
【請求項16】
請求項15に記載の検査装置において、
前記スワスの画像信号を記憶するメモリを備え、
前記形状が同一な部分が同一のスワスに存在しない場合には、前記メモリに格納されたスワスの画像信号から比較演算の相手となる部分画像を検索することを特徴とする検査装置。
【請求項1】
複数のダイが形成された半導体ウェーハについて、当該ダイ中に形成された少なくとも2つの回路パターンの画像を比較演算することにより欠陥を検査する検査装置において、
前記被検査試料に一次荷電粒子線を照射し、得られる二次電子または反射電子に基づく検出信号を出力する荷電粒子光学カラムと、
前記ダイの設計情報を用いて、当該ダイ中に形成された回路パターンのうち形状が同一な部分の位置情報を複数抽出し、前記比較演算に使用する画像の撮像領域を決定する演算プロセッサとを備え、
前記演算プロセッサにより決定された取得領域の画像を撮像し、当該画像を用いて前記欠陥の検査を行うことを特徴とする検査装置。
【請求項2】
請求項1に記載の検査装置において、
前記形状が同一な部分の位置情報を1つのダイ内に形成された回路パターンから抽出し、
当該1のダイの画像のみを使用して前記欠陥の検査を行うことを特徴とする検査装置。
【請求項3】
所定パターンが形成された被検査試料の欠陥を検査する検査装置において、
前記被検査試料に一次荷電粒子線を照射し、得られる二次電子または反射電子に基づく検出信号を出力する荷電粒子光学カラムと、
前記検出信号から生成される画像信号を用いて前記欠陥の有無を判定する欠陥判定部と、
前記所定パターンの設計情報を用いて、前記パターンのうち形状が同一な部分の位置情報を複数抽出する演算プロセッサとを備え、
前記欠陥判定部は、
前記画像信号から前記複数の位置情報に対応する複数の部分画像を取得し、
当該複数の部分画像のうち任意の2つの画像を比較することにより欠陥の有無を判定することを特徴とする検査装置。
【請求項4】
請求項3に記載の検査装置において、
前記欠陥判定部は、
与えられた基準位置に対する前記設計情報から生成される前記パターンの画像と、当該基準位置の画像とを比較することにより、前記部分画像を前記パターンから切り出す基準位置の補正量を計算し、
当該補正量により前記基準位置を補正して前記部分画像を取得することを特徴とする検査装置。
【請求項5】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に対してパターンの輪郭線抽出を行い、
当該生成された複数の輪郭線画像のうち任意の2つの輪郭線画像を比較して欠陥検査を行うことを特徴とする検査装置。
【請求項6】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像を加算平均して参照画像を生成し、
当該参照画像と前記複数の部分画像のうちの1の部分画像との差画像を形成して欠陥検査を行うことを特徴とする検査装置。
【請求項7】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に対し、パターンのエッジ位置のばらつき,コントラストのばらつき、または輝度のばらつきのいずれかを計算し、
前記ばらつきの平均値からの乖離が大きなパターンを欠陥と判定することを特徴とする検査装置。
【請求項8】
請求項3に記載の検査装置において、
前記欠陥判定部は、
前記複数の部分画像に含まれる第1の部分画像と第2の部分画像とを比較し、
更に前記第1の部分画像と、前記第2の部分画像とは異なる第3の部分画像とを比較し、
前記2つの比較結果を用いて、前記第1の部分画像に欠陥が存在するか否かを判定することを特徴とする検査装置。
【請求項9】
請求項3に記載の検査装置において、
前記荷電粒子光学カラムの画像取得条件を制御する制御ユニットを備え、
当該制御ユニットは、
与えられた領域情報に基づき、前記被検査試料上の所定領域毎に画素寸法を変えて画像を取得するよう荷電粒子光学カラムを制御することを特徴とする検査装置。
【請求項10】
請求項9に記載の検査装置において、
前記欠陥判定部は、
画像比較による検査と輪郭線画像の比較による検査を、前記所定領域または前記画素寸法に応じて切替えることを特徴とする検査装置。
【請求項11】
請求項9に記載の検査装置において、
前記欠陥判定部は、
前記所定領域または前記画素寸法に応じて、検査感度を変えることを特徴とする検査装置。
【請求項12】
請求項3に記載の検査装置において、
前記演算プロセッサは、
予め与えられた検査の非実行領域の情報を用い、当該検査の非実行領域を避けて前記形状が同一な部分の位置情報を抽出することを特徴とする検査装置。
【請求項13】
請求項12に記載の検査装置において、
前記検査の非実行領域は、前記被検査試料上におけるパターンの無い領域,ダミーパターン領域,欠陥があっても品質に影響の無い領域のいずれかであることを特徴とする検査装置。
【請求項14】
請求項3に記載の検査装置において、
前記演算プロセッサは、
前記設計情報から生成されるパターンの画像をメッシュ分割し、当該メッシュ毎に前記形状が同一な部分を規定することを特徴とする検査装置。
【請求項15】
請求項3に記載の検査装置において、
前記被検査試料を所定方向に移動させる試料ステージと、
前記被検査試料上で、前記一次荷電粒子線が前記試料ステージの移動方向とは交差する方向に走査させることで、前記画像信号としてスワスの画像信号を出力するよう前記荷電粒子光学カラムを制御する荷電粒子光学カラム制御部とを備え、
前記欠陥判定部は、前記スワスの画像信号から前記複数の部分画像を取得して欠陥の有無を判定することを特徴とする検査装置。
【請求項16】
請求項15に記載の検査装置において、
前記スワスの画像信号を記憶するメモリを備え、
前記形状が同一な部分が同一のスワスに存在しない場合には、前記メモリに格納されたスワスの画像信号から比較演算の相手となる部分画像を検索することを特徴とする検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−150065(P2012−150065A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−10355(P2011−10355)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]