
回転センサ、及び、撹拌脱泡装置
【課題】自転公転方式の撹拌脱泡装置において、容器の挙動(特に自転数)を正確に把握することを可能にする回転センサを提供する。
【解決手段】回転センサ220は、所定の材料Mが収納された収納容器100を公転させながら自転させることにより、材料を撹拌脱泡する装置(攪拌脱泡装置1)に利用される回転センサであって、収納容器の自転数を直接検出するように構成されている。
【解決手段】回転センサ220は、所定の材料Mが収納された収納容器100を公転させながら自転させることにより、材料を撹拌脱泡する装置(攪拌脱泡装置1)に利用される回転センサであって、収納容器の自転数を直接検出するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転センサ、特に、撹拌脱泡装置に利用される回転センサ、及び、撹拌脱泡装置に関する。
【背景技術】
【0002】
材料が収納された容器を公転させながら自転させることによって、容器内で材料を攪拌脱泡する装置(自転公転方式の攪拌脱泡装置)が知られている(例えば特許文献1参照)。この攪拌脱泡装置では、容器を公転させながら自転させることによって容器内の材料に作用する遠心力を利用して、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させて脱泡することができる。
【0003】
ところで、自転公転方式の撹拌脱泡装置では、材料の処理状況は材料を収納する容器の挙動(回転数:自転数及び公転数)の影響を受ける。そのため、材料を適切に処理するためには、容器の挙動を制御することが重要であるところ、容器の挙動と容器ホルダの挙動とを一致させる技術が開発されている(例えば特許文献2参照)。これらの技術によれば、容器ホルダの挙動を、容器の挙動とみなすことが可能である。このことから、従来、自転公転方式の撹拌脱泡装置では、容器ホルダの挙動を検出し、これを容器の挙動とみなしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-43568号公報
【特許文献2】特開平11-226376号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自転公転方式の撹拌脱泡装置において、容器の挙動(特に自転数)を直接検出することができれば、材料の処理状況をより正確に把握することができる。
【0006】
本発明の一つの態様は、自転公転方式の撹拌脱泡装置において、容器の挙動(特に自転数)を正確に把握することを可能にする回転センサ、及び、撹拌脱泡装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明に係る回転センサは、
所定の材料が収納された収納容器を公転させながら自転させることにより、前記材料を撹拌脱泡する装置に利用される回転センサであって、
前記収納容器の自転数を直接検出するように構成されている。
【0008】
本発明によると、収納容器の自転数を正確に検出することができることから、収納容器の挙動を正確に検知することが可能になる。そのため本発明によると、材料の処理状況を正確に把握することができるとともに、材料の処理履歴を正確に記録することが可能になる。
【0009】
(2)この回転センサにおいて、
前記収納容器が公転しながら自転する際に前記収納容器の自転数に依拠した回転数で相対的に回転する、検出子及び被検出子を有していてもよい。
【0010】
これにより、収納容器の自転数を直接検出することが可能になる。
【0011】
(3)この回転センサにおいて、
前記検出子及び被検出子の一方が、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記検出子及び被検出子の他の一方が、前記収納容器に対して回転可能に保持されて、前記収納容器の公転に伴って作用する遠心力によって、前記収納容器を公転させるための回転体に対して一定の姿勢を維持するように構成されていてもよい。
【0012】
かかる構成によると、収納容器が公転しながら自転する際に、収納容器の自転数に依拠した回転数で、検出子及び被検出子を相対的に回転させることができる。
【0013】
(4)この回転センサにおいて、
前記検出子は、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記被検出子は、前記収納容器の前記自転軸線を囲むように延びる経路に沿って移動可能に保持されており、前記収納容器の公転に伴って作用する遠心力によって、前記経路内を、前記収納容器の公転軸線から最も遠い領域に移動するように構成されていてもよい。
【0014】
かかる構成によると、収納容器が公転しながら自転する際に、収納容器の自転数に依拠した回転数で、検出子及び被検出子を相対的に回転させることができる。
【0015】
(5)この回転センサにおいて、
前記検出子は、発光素子及び受光素子を含み、
前記被検出子が、前記発光素子及び受光素子の間を通過するように構成されていてもよい。
【0016】
(6)この回転センサにおいて、
前記検出子はコイル部を有し、
前記被検出子は磁性体部を有してもよい。
【0017】
(7)この回転センサにおいて、
前記検出子は、一組の電極端子を含む電気回路を有し、
前記被検出子は、前記一組の電極に接触して前記電気回路を閉回路とする導体部を有してもよい。
【0018】
(8)本発明に係る回転センサユニットは、上記いずれかの回転センサを含む。
【0019】
(9)本発明に係る攪拌脱泡装置は、
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
前記収納容器の自転数を直接検出するための回転センサを含む。
【0020】
本発明によると、収納容器の自転数を正確に検出することができることから、収納容器の挙動を正確に検知することが可能になる。そのため本発明によると、材料の処理状況を正確に把握することができるとともに、材料の処理履歴を正確に記録することが可能になる。
【0021】
(10)この撹拌脱泡装置において、
所定の回転軸線を中心に公転しながら自転することが可能に構成された、前記収納容器を保持する容器ホルダと、
前記容器ホルダを駆動させる駆動部と、
前記駆動部の動作を制御する制御部と、
をさらに含み、
前記制御部は、前記回転センサからの情報に基づいて、前記駆動部の動作を制御してもよい。
【0022】
(11)この撹拌脱泡装置において、
前記制御部は、前記情報に基づいて、前記駆動部の動作を停止させてもよい。
【図面の簡単な説明】
【0023】
【図1】攪拌脱泡装置の構成を説明するための図。
【図2】攪拌脱泡装置の構成を説明するための図。
【図3】攪拌脱泡装置に適用可能な収納容器を説明するための図。
【図4】回転センサ(センサユニット)の構成を説明するための図。
【図5】回転センサ(センサユニット)の構成を説明するための図。
【図6】回転センサ(センサユニット)の動作を説明するための図。
【図7】自転数検出部について説明するための図。
【図8】攪拌脱泡方法を説明するための図。
【図9】変形例に係る回転センサ(センサユニット)の構成を説明するための図。
【図10】変形例に係る回転センサ(センサユニット)の動作を説明するための図。
【図11】変形例に係る回転センサ(センサユニット)の構成を説明するための図。
【発明を実施するための形態】
【0024】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0025】
(1)攪拌脱泡装置1の構成
はじめに、本実施の形態に係る攪拌脱泡装置1の構成について、図1及び図2を参照しながら説明する。
【0026】
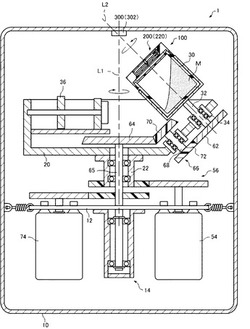
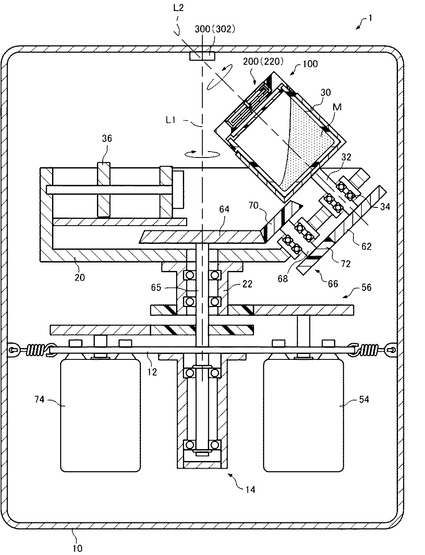
攪拌脱泡装置1は、図1に示すように、筐体10を有する。筐体10内部には、後述する種々の機構を支持するための支持基板12が、防振ばねを介して取り付けられている。筐体10は、図示しない開閉可能に構成されたドアを有し、当該ドアを開けると容器ホルダ30が露出して、容器ホルダ30に収納容器100を着脱することが可能になる。
【0027】
攪拌脱泡装置1は、図1に示すように、回転体20を含む。回転体20は、支持基板12(筐体10)に対して回転可能に構成されている。具体的には、攪拌脱泡装置1では、回転体20には回転筒22が固定されており、回転筒22が、ベアリングを介して、後述する回転軸65に保持された構成となっている。これにより、回転体20を、支持基板12に対して回転可能とすることができる。なお、攪拌脱泡装置1では、回転体20の回転軸線L1と、回転筒22及び回転軸65の延伸方向とは一致することになる。
【0028】
攪拌脱泡装置1は、図1に示すように、容器ホルダ30を含む。容器ホルダ30は、後述する収納容器100を保持する役割を果たす。容器ホルダ30は、回転体20の、回転軸線L1から所定間隔離れた位置に保持されている。これにより、容器ホルダ30は、回転体20の回転に伴って、回転軸線L1を中心に公転することとなる。
【0029】
容器ホルダ30は、回転体20に対して自転(回転)可能に保持される。具体的には、攪拌脱泡装置1では、容器ホルダ30には自転軸32が固定されており、自転軸32が、ベアリング34を介して回転体20に保持された構成となっている。これにより、容器ホルダ30が、回転体20に対して自転可能となる。
【0030】
なお、本実施の形態では、容器ホルダ30は、その自転軸線L2が、回転軸線L1(公転軸線)と斜めに交差するように構成されている。具体的には、攪拌脱泡装置1は、自転軸線L2が回転軸線L1と45度の角度で交差するように構成されている。ただし、変形例として、容器ホルダ30は、自転軸線L2が回転軸線L1と平行になるように、回転体20に取り付けることも可能である(図示せず)。
【0031】
本実施の形態では、回転体20には、バランス錘36が取り付けられている。バランス錘36は、回転軸線L1からの距離を変更することが可能に構成することができ、バランス錘36によって、攪拌脱泡装置1を安定して動作させることができる。ただし変形例として、攪拌脱泡装置を、一つの回転体20に、複数の容器ホルダが取り付けられた構成とすることも可能である(図示せず)。この場合、複数の容器ホルダは、回転軸線L1を中心とする点対称の配置となるように取り付けることができる。
【0032】
攪拌脱泡装置1は、容器ホルダ30を公転させながら自転させる回転駆動機構(容器ホルダ30を駆動させるための駆動機構)を含む。以下、回転駆動機構の構成について説明する。
【0033】
回転駆動機構は、公転駆動機構を有する。公転駆動機構は、回転体20を回転させることによって、容器ホルダ30を、回転軸線L1を中心に公転させる。本実施の形態では、公転駆動機構は、モータ54と、モータ54の動力を回転筒22に伝達する動力伝達機構56によって実現されている。なお、モータ54は、インダクションモータやサーボモータ、あるいはPMモータなど、既に公知となっているいずれかのモータを利用することが可能である。また、動力伝達機構56は、ギアや、プーリ及びベルト等、既に公知となっているいずれかの動力伝達要素により実現することができる。
【0034】
回転駆動機構は、また、自転力付与機構を有する。本実施の形態では、自転力付与機構は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与するように構成されている。
【0035】
自転力付与機構は、自転ギア62を有する。自転ギア62は容器ホルダ30に固定されており、容器ホルダ30と一体的に挙動する。また、自転力付与機構は自転力付与ギア64を有する。自転力付与ギア64は、ベアリングユニット14に保持された回転軸65に固定されており、これにより、自転力付与ギア64は、支持基板12に対して回転可能となる。なお、先述したように、回転筒22は、ベアリングを介して回転軸65に保持されている。そのため、自転力付与ギア64と回転筒22とは、同心に、かつ、独立した回転数で回転することが可能になる。そして、自転力付与機構は、自転ギア62と自転力付与ギア64との間で動力を伝達する自転動力伝達機構66を有する。本実施の形態では、自転動力伝達機構66は、回転体20に回転可能に取り付けられた回転軸68と、回転軸68に固定された第1補助ギア70及び第2補助ギア72とを含んで構成されている。
【0036】
そして、自転力付与機構は、自転力付与ギア64の回転数を調整するためのブレーキ74を有する。ブレーキ74は、例えばパウダブレーキやディスクブレーキ、油圧ブレーキ等、既に公知となっているいずれかのブレーキ装置を適用することができる。自転力付与機構によると、自転動力伝達機構66によって、自転ギア62の回転数と自転力付与ギア64の回転数とが関連付けられる。そのため、自転ギア62を公転させながら(回転体20を回転させながら)自転力付与ギア64の回転数を規制することにより、自転ギア62を自転させることができる。例えば、自転力付与ギア64を自転ギア62の公転数と同じ回転数で回転させると、自転ギア62は自転することなく公転のみすることになる。そして、自転力付与ギア64を自転ギア62の公転数と異なる回転数で回転させると、自転ギア62は公転しながら自転することになる。このことから、ブレーキ74で自転力付与ギア64の回転数を調整することによって、自転ギア62の自転数を調節することが可能になる。なお、本実施の形態の変形例として、ブレーキ74にかえてモータを利用して自転力付与ギア64の回転数を調整するように、攪拌脱泡装置を構成することも可能である(図示せず)。
【0037】
攪拌脱泡装置1は、回転センサ95(図2参照)をさらに備えた構成とすることが可能である。回転センサ95は、回転体20の回転数(容器ホルダ30の公転数)を検出することが可能に構成されている。回転センサ95を、容器ホルダ30の公転数及び自転数を検出する構成とすることも可能であり、容器ホルダ30の公転数のみを検出する構成とすることも可能である。
【0038】
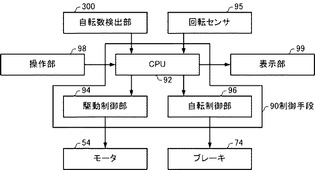
攪拌脱泡装置1は、図2に示す制御手段90を含む。制御手段90は、攪拌脱泡装置1の動作を統括制御する役割を果たす。以下、制御手段90について説明する。図2は、制御手段90について説明するための図である。
【0039】
制御手段90は、マイクロプロセッサ(CPU92)と、公転駆動機構(モータ54)を制御する駆動制御部94と、自転力付与機構(ブレーキ74)の動作を制御する自転制御部96とを含む。そして、CPU92は、運転データ(例えば、材料Mの処理条件に合わせてユーザが入力したデータ)に基づいて駆動制御部94及び自転制御部96に各種の信号を出力することにより、攪拌脱泡装置1(容器ホルダ30を駆動させるための回転駆動機構)の動作を制御する。
【0040】
先述したように、攪拌脱泡装置1では、容器ホルダ30は回転体20の回転に伴って公転することから、モータ54の出力を制御することによって、容器ホルダ30の公転数が制御される。すなわち、モータ54の出力を制御することにより、容器ホルダ30を所望の公転数で公転させることが可能になる。
【0041】
例えばモータ54としてインダクションモータを採用する場合には、駆動制御部94は、インバータの動作を制御し、モータ54に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ54としてサーボモータを採用する場合には、駆動制御部94は、専用のドライバ及びハードウェアによって実現され、モータ54を所望の回転数で動作させるための各種処理を行う。また、駆動制御部94を、回転センサ95で検出された容器ホルダ30の回転数情報を取得し(例えばCPU92を介して取得し)、当該回転数情報に基づいて、回転体20の回転数を調整するための種々の処理を行うように構成することも可能である。
【0042】
また、攪拌脱泡装置1では、ブレーキ74の出力を制御することによって、容器ホルダ30の自転数が制御される。すなわち、ブレーキ74の出力を制御することにより、容器ホルダ30を所望の自転数で自転させることが可能になる。
【0043】
自転制御部96は、ブレーキ74のブレーキ力を調整する専用のドライバ及びハードウェアによって実現することができる。例えばブレーキ74としてパウダブレーキやディスクブレーキを利用する場合、自転制御部96は、ブレーキ74に印加される電圧を制御する電圧制御手段によって実現することができる。あるいは、ブレーキ74として油圧ブレーキを採用する場合には、自転制御部96は、油圧ブレーキに供給される油の流れを制御する流量制御手段によって実現することができる。また、自転制御部96を、後述する自転数検出部300で検出された収納容器100の自転数情報を取得し(例えばCPU92を介して取得し)、当該自転数情報に基づいて、容器ホルダ30の回転数を調整するための種々の処理を行うように構成することも可能である。
【0044】
そして、CPU92は、所定のタイミングで、駆動制御部94及び自転制御部96に各種の信号(容器ホルダ30の目標回転数データ等)を送信する処理を行う。これにより、容器ホルダ30を所望の回転数で回転させることができる。なお、CPU92は、自転数検出部300を介して収納容器100の自転数情報を取得し、回転センサ95を介して回転体20(容器ホルダ30)の回転数情報を取得して、これらの情報を駆動制御部94及び自転制御部96に送信する処理を行うことも可能である。具体的には、CPU92を、収納容器100の自転数情報及び容器ホルダ30の自転数情報に基づいて収納容器100の自転数と容器ホルダ30の自転数とを比較し、その差が所定値よりも大きくなったことを検出したときに、駆動制御部94及び自転制御部96の少なくとも一方に信号を送信し、容器ホルダ30の回転数を変化させる(例えば自転数を小さくする、公転数を大きくする等)ように構成することも可能である。
【0045】
また、CPU92は、自転数検出部300を介して取得した収納容器100の自転数情報、及び、回転センサ95を介して取得した回転体20の回転数情報(容器ホルダ30の回転数情報)を、経過時間と関連付けて図示しない記憶部に格納する処理を行うことも可能である。
【0046】
さらに、CPU92は、操作部98から入力された動作データを受け付けて、図示しない記憶部に格納する処理や、表示部99に各種情報(操作部98から入力された動作データや、攪拌脱泡装置1の運転状況等)を表示させるための処理を行う。
【0047】
(2)収納容器100
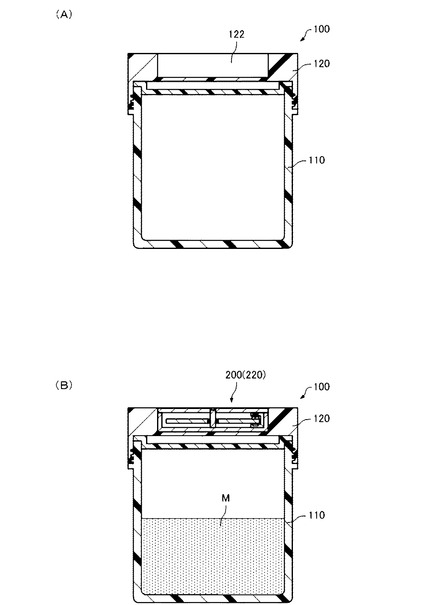
次に、本実施の形態に適用可能な収納容器100について、図3(A)及び図3(B)を参照して説明する。収納容器100は、材料(被攪拌脱泡材料)Mが収納される容器である。収納容器100は、図3(A)に示すように、例えば有底円筒状の本体110と、本体110に着脱可能な蓋体120とを含む構成とすることができる。そして、図3(B)に示すように、収納容器(本体110)の内部空間に、材料Mが収納される。収納容器100は、容器ホルダ30に着脱可能に構成されている。そして、収納容器100は、容器ホルダ30に保持されて容器ホルダ30の自転に伴って自転し、容器ホルダ30の公転に伴って公転する。なお、収納容器100は、容器ホルダ30に対する空回りを防止するための、空回り防止機構を備えた構成とすることも可能である(図示せず)。また、収納容器100の構成材料は特に限定されるものではなく、樹脂や金属など、既に公知となっているいずれかの材料によって構成された容器を利用することができる。
【0048】
本実施の形態では、収納容器100は、センサユニット200を保持することが可能に構成されている。具体的には、収納容器100では、蓋体120の上面側に凹部122が構成され、凹部122で、センサユニット200を保持するように構成されている(図3(B)参照)。
【0049】
(3)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤等の種々の材料を適用することができる。また、材料Mとして、液状の材料と粒状(粉状)の材料との混合材料を適用することも可能である。このとき、収納容器100には、材料Mとともに、粒状(粉状)材料を粉砕するための粉砕用メディア(例えばジルコニアボール)を収納することも可能である。
【0050】
(4)センサユニット200
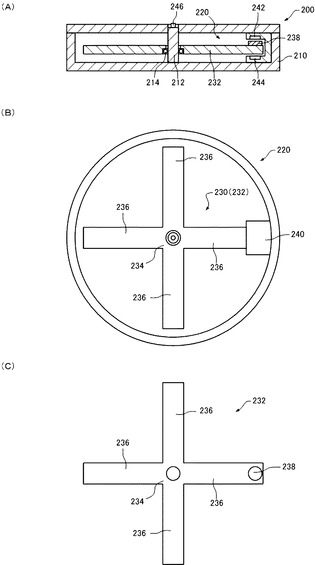
次に、本実施の形態に適用可能なセンサユニット200について、図4(A)〜図6(D)を参照して説明する。なお、センサユニット200は、筐体210と、筐体210に収納された回転センサ220とを有し、先述した収納容器100(蓋体120に形成された凹部122)に保持されて、収納容器100と一体的に挙動する部材である。
【0051】
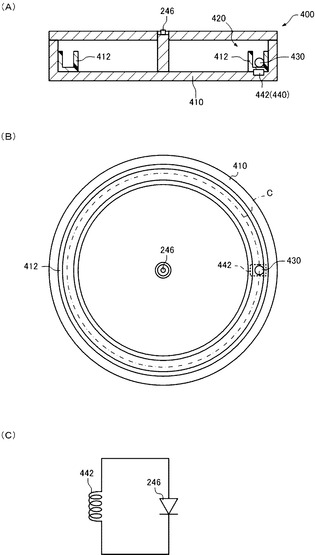
(4−1)被検出子230
センサユニット200は、被検出子230を含む。被検出子230は、図4(A)〜図4(C)に示すように、回転部材232を有する。回転部材232は、図4(A)に示すように、筐体210に固定された中心軸212に、ベアリング214を介して取り付けられている。これにより、回転部材232(被検出子230)は、筐体210に対して回転可能となる。回転部材232は、中央部234と、中央部234から延びる四個の延設部236とを含む(図4(B)及び図4(C)参照)。ただし回転部材232の外形はこれに限られるものではなく、検出子240の性質に合致した形状とすることができる。回転部材232は、また、後述する検出子240が検出可能ないずれかの材料で構成される。本実施の形態では、回転部材232は、発光素子242(後述)が発した光を遮断することが可能な材料、例えばアルミニウムなどの金属で構成することができる。ただし、本発明はこれに限られるものではなく、検出子240の構造に合致した材料で、回転部材232を構成することができる。
【0052】
被検出子230は、その重心が中央部234(中心軸212/自転軸線L2)からずれた位置に配置されるように構成される。本実施の形態では、図4(A)及び図4(C)に示すように、回転部材232には錘238が取り付けられている。具体的には、本実施の形態では、一つの錘238が、一つの延設部236の先端に取り付けられており、これによって、被検出子230の重心位置が、中心軸212からずれた位置となる。すなわち、錘238は、被検出子230を偏心させる役割を果たし、偏心錘と称することも可能である。
【0053】
(4−2)検出子240
センサユニット200は、検出子240を含む。検出子240は、筐体210に固定され、筐体210と一体的に挙動する。なお、検出子240は、筐体210の周縁部に(中心軸212からずれた位置に)配置される。これにより、検出子240は、筐体210(収納容器100)の自転に伴って、自転軸線L2を中心に回転(公転)することになる。検出子240は、図4(A)に示すように、発光素子242及び受光素子244を有する。発光素子242及び受光素子244は、所定の間隔をあけて対向するように配置されており、発光素子242が発した光を受光素子244が受光するように構成されている。そして、検出子240は、被検出子230(延設部236)が、発光素子242及び受光素子244の間を通過するように配置される。
【0054】
(4−3)その他の構成
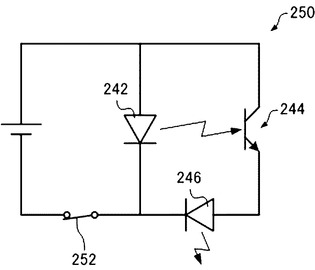
センサユニット200は、発光部246を有する。発光部246は、例えば赤外線LEDによって実現することができる。本実施の形態では、発光部246は、中心軸212の上端に、光軸が自転軸線L2に沿って延びるように配置される(図1参照)。これにより、発光部246が、公転軌道上のいずれの位置にある場合でも、自転数検出部300の受光素子302(後述)が、発光部246からの光を受光することが可能になる。
【0055】
また、図5は、本実施の形態に係るセンサユニット200を実現することが可能な電気回路250を示す。図5に示す通り、センサユニット200では、スイッチ252をONにすると発光素子242及び発光部246が発光する。そして、延設部236が発光素子242及び受光素子244の間を通過し、発光素子242及び受光素子244の間で光が遮られるたびに、発光部246が消灯することになる。
【0056】
(4−4)センサユニット200の動作
次に、本実施の形態に係る攪拌脱泡装置1を動作させたときの、センサユニット200(回転センサ220)の動作について、図6(A)〜図6(D)を参照して説明する。
【0057】
攪拌脱泡装置1を動作させる準備として、材料Mが収納された収納容器100(センサユニット200が固定されたもの)を用意し、これを容器ホルダ30に保持させる(図1及び図3(B)参照)。そして、攪拌脱泡装置1を動作させて、容器ホルダ30を公転させながら自転させる。これにより、材料Mが撹拌脱泡処理される。
【0058】
ところで、本実施の形態では、センサユニット200は、収納容器100に固定される。そのため、収納容器100が公転しながら自転すると、センサユニット200(回転センサ220)も公転しながら自転することになる。
【0059】
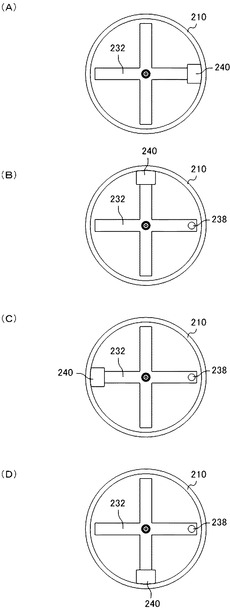
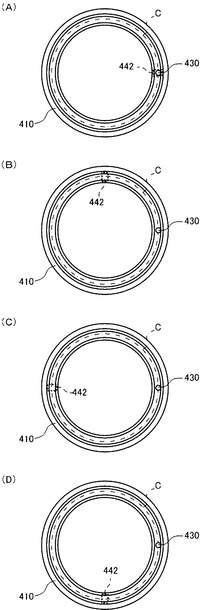
ここで、センサユニット200(回転センサ220)が公転しながら自転すると、その公転及び自転の作用を受けて、回転センサ220の被検出子230及び検出子240が、自転数に依拠した回転数で相対的に回転することになる。以下、この作用について、図6(A)〜図6(D)を参照して詳述する。なお、図6(A)〜図6(D)は、センサユニット200が公転しながら自転する様子を模式的に示す図である。図6(A)〜図6(D)では、センサユニット200が一回自転するプロセスを四分割し、簡単のために、公転による遠心力が常に紙面右方向を向くように表現してある。
【0060】
先述したように、センサユニット200では、被検出子230の回転部材232には、錘238が取り付けられている。そのため、センサユニット200が公転すると、公転による遠心力の作用により、被検出子230には、錘238を回転軸線L1から最も遠い位置に向かって移動させようとする力が作用する。また、被検出子230(回転部材232)は、中心軸212を中心に回転可能に構成されている。このことから、センサユニット200が公転しながら自転すると、被検出子230(回転部材232)は、筐体210内で、図6(A)〜図6(D)に示すように、錘238が回転軸線L1から最も遠い位置に向かうように回転し、常に、回転体20に対して一定の姿勢を維持することになる。
【0061】
これに対して、センサユニット200では、検出子240は筐体210に固定される。そのため、センサユニット200が公転しながら自転すると、検出子240は、センサユニット200の自転に伴って、自転軸線L2を中心に、回転体20に対して回転(公転)する。
【0062】
以上のことから、本実施の形態では、センサユニット200が公転しながら自転すると、被検出子230と検出子240とが相対的に回転し、その相対回転数は、センサユニット200の自転数(回転体20に対する自転数)に等しくなる。
【0063】
そして、センサユニット200では、延設部236が発光素子242及び受光素子244の間を通過するたびに、発光部246が消灯することから、発光部246は、回転センサ220(すなわち収納容器100)の自転数に依拠したタイミングで発光・消灯を繰り返すことになる。
【0064】
(4−5)変形例
なお、センサユニット200の変形例として、被検出子を筐体210に固定し、検出子を筐体210に対して回転可能に構成することも可能である(図示せず)。
【0065】
(5)自転数検出部300
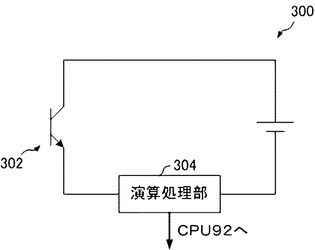
本実施の形態では、攪拌脱泡装置1には、自転数検出部300が取り付けられる(図1及び図2参照)。自転数検出部300は、攪拌脱泡装置1の動作時におけるセンサユニット200の自転数(すなわち収納容器100の自転数)を検出する役割を果たす。
【0066】
本実施の形態では、自転数検出部300は、図7に示すように、受光素子302と、演算処理部304とを含む。ここで、自転数検出部300は、受光素子302が光を受光しているときにのみ、演算処理部304に電流が流れるように構成されている。また、受光素子302は、発光部246からの光を受光するように配置される。かかる構成により、自転数検出部300の演算処理部304で、演算処理部304に流れる電流のON/OFFに基づいて(例えば、電流のON/OFFの回数データと、被検出子230の形状に関するデータ(延設部236の個数データ)及び時間データに基づいて)、収納容器100の自転数を示す自転数データを演算し、出力することが可能になる。
【0067】
なお、本実施の形態では、自転数検出部300(受光素子302)は、自転軸線L1と自転軸線L2の交点に配置されている(図1参照)。ただし、受光素子302の位置はこれに限られるものではなく、発光部246から出力された光を検出することが可能ないずれかの位置に配置することができる。また、自転数検出部300は、攪拌脱泡装置1の筐体10に対して着脱可能な構成とすることも可能である。また、本実施の形態では、攪拌脱泡装置1は、自転数検出部300から出力された自転数データは、CPU92に入力されるように構成されている(図2参照)。これにより、収納容器100の自転数データに基づいて、攪拌脱泡装置1の動作を統括制御することが可能になる。また、変形例として、演算処理部304の機能を、CPU92で実現することも可能である。そして、本実施の形態では、攪拌脱泡装置1と、回転センサ220(センサユニット200)、自転数検出部300をあわせて、攪拌脱泡装置と称することも可能である。
【0068】
(6)撹拌脱泡方法
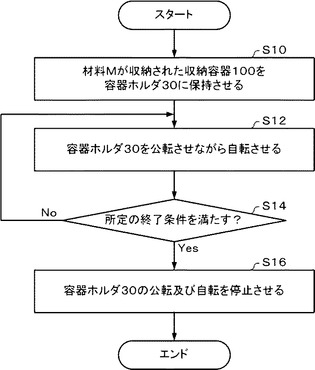
次に、本実施の形態に係る材料Mの攪拌脱泡方法について、図8を参照して説明する。ここで、図8は、攪拌脱泡方法を説明するためのフローチャートである。
【0069】
本実施の形態に係る攪拌脱泡方法は、図8に示すように、材料Mが収納された収納容器100を容器ホルダ30に保持させる工程(ステップS10)と、攪拌脱泡装置1を運転して容器ホルダ30(収納容器100及び回転センサ220(センサユニット200))を公転させながら自転させる工程(ステップS12)とを含む。これにより、収納容器100内で、材料Mを攪拌脱泡することができる。そして、所定の終了条件を満たしたか否かを判断し(ステップS14)、満たしたと判断した時に(ステップS14におけるYesのときに)、容器ホルダ30の公転及び自転を停止させる処理(ステップS16)を行う。なお、終了条件は、材料Mの性質や処理条件に合わせて設定することができる。例えば終了条件として、収納容器100の自転回数の積算量を採用することができる。あるいは、終了条件として、収納容器100の自転数が所定値(例えば1000rpm)を越えた状態における、収納容器100の自転回数の積算量を採用することができる。ただし本発明はこれに限られるものではなく、終了条件として、容器ホルダ30の回転時間を採用することも可能である。
【0070】
(7)作用効果
次に、本実施の形態が奏する作用効果について説明する。
本実施の形態によると、回転体20や容器ホルダ30の回転数に関するデータを利用することなく、センサユニット200によって、収納容器100の挙動(自転数)を直接検出することが可能になる。そのため、収納容器100内の材料Mの処理状況を正確に把握することができる。このことから、攪拌脱泡装置1によると、材料Mを所望の状態に撹拌脱泡処理することが可能になるとともに、材料Mの処理履歴を正確に記録することが可能になる。
【0071】
(8)変形例
以下、本実施の形態の変形例について説明する。
【0072】
(8−1)第1の変形例
本変形例では、攪拌脱泡装置1は、図9(A)〜図9(C)に示す、センサユニット400を有する。センサユニット400は、筐体410と、筐体410に収納された回転センサ420とを有する。本実施の形態では、回転センサ420は、被検出子430及び検出子440を含んで構成されている。以下、センサユニット400の構成について説明する。
【0073】
(8−1−1)被検出子430
センサユニット400は、被検出子430を有する。被検出子430は、図9(B)に示すように、筐体410の中央部(自転軸線L2)を囲むように延びるループ状の移動経路Cに沿って移動可能に保持されている。本実施の形態では、図9(A)及び図9(B)に示すように、筐体410はガイド412を有し、ガイド412によって移動経路Cが区画される。なお、センサユニット400では、ガイド412は、移動経路Cが、筐体410の中心部(容器ホルダ30の自転軸線L2)を中心とする円周形状となるように構成される。ただし本発明はこれに限られるものではなく、ガイド412を、移動経路Cが多角形となるように構成することも可能である(図示せず)。あるいは、筐体410(その内壁面)を利用することにより、特別なガイド412を設けることなく、センサユニットを実現することも可能である(図示せず)。また、被検出子430は、磁性体(強磁性体)で構成される。本実施の形態では、被検出子430は、球状の磁性体によって実現することができる。
【0074】
(8−1−2)検出子440
センサユニット400は、検出子440を有する。検出子440は、筐体410に固定され、筐体410と一体的に挙動する。検出子440は、コイル体442を有する。コイル体442は、筐体410に固定される。詳しくは、コイル体442は、筐体410の中心から所定の間隔をあけた位置に固定される。コイル体442は、図9(C)に示すように、発光部246と電気的に接続されている。なお、検出子440は、図9(C)に示すように、発光部246を発光させるための特別な電源を有さずに構成されている。
【0075】
本実施の形態では、センサユニット400は、被検出子430が移動経路Cの所定の領域を通過する際に、コイル体442に、発光部246を発光させるに足る誘導電流が発生するように設計される。このとき、センサユニット400の自転数が所定の値(例えば100rpm)を越えた場合にのみ、発光部246が発光するように、センサユニット400を設計することも可能である。具体的な設計は、コイル体442の巻き数及び移動経路C(被検出子430)からの距離、並びに、コイル体442と被検出子430の素材の組み合わせを調整することによって実現することができる。なお、センサユニット400は、コイル体442を一つのみ有するように構成することも可能であり、これを複数有するように構成することも可能である。また、コイル体442を複数有するように構成する場合、すべてのコイル体442の感度を同じとしてもよく、感度に差をつけてもよい。なお、コイル体442の感度は、コイル体442の巻き数や移動経路Cとの間隔、コイル体442の構成材料によって調整することができる。
【0076】
(8−1−3)センサユニット400の動作
次に、撹拌脱泡装置を動作させたときの、センサユニット400の動作について、図10(A)〜図10(D)を参照して説明する。
【0077】
先述したように、センサユニット400では、被検出子430は、移動経路Cに沿って移動可能に保持されている。また、センサユニット400が公転すると、公転による遠心力の作用により、被検出子430は、回転軸線L1から最も遠い位置に向かう力が作用する。このことから、センサユニット400が公転しながら自転すると、被検出子430は、移動経路Cに沿って、常に、回転軸線L1から最も遠い位置に移動することになる。そのため、センサユニット400が公転しながら自転すると、被検出子430は、常に、回転体20に対して(ほぼ)一定の位置に配置されることになる。
【0078】
これに対して、センサユニット400では、検出子440(コイル体442)は筐体410に固定される。そのため、センサユニット400が公転しながら自転すると、検出子440は、センサユニット400の自転に伴って、回転体20に対して回転する。
【0079】
このことから、センサユニット400が公転しながら自転すると、被検出子430と検出子440とが相対的に回転し、その相対回転数は、センサユニット400の自転数に等しくなる(図10(A)〜図10(D)参照)。
【0080】
そして、センサユニット400によると、被検出子430が移動経路Cの所定領域を通過するたびに(被検出子430がコイル体442に近接又は離間するたびに)、コイル体442が誘導電流を発生し、これによって発光部246が発光する。すなわち、発光部246は、センサユニット400の自転数(すなわち収納容器100の自転数)に依拠したタイミングで発光・消灯を繰り返すことになる。
【0081】
このことから、センサユニット400を利用した場合でも、自転数検出部300によって、撹拌脱泡装置の動作時におけるセンサユニット400の自転数(すなわち収納容器100の自転数)を検出することが可能になる。特に、センサユニット400によると、発光部246を発光させるための電源が不要になるため、その構成を単純化することが可能になる。
【0082】
(8−2)第2の変形例
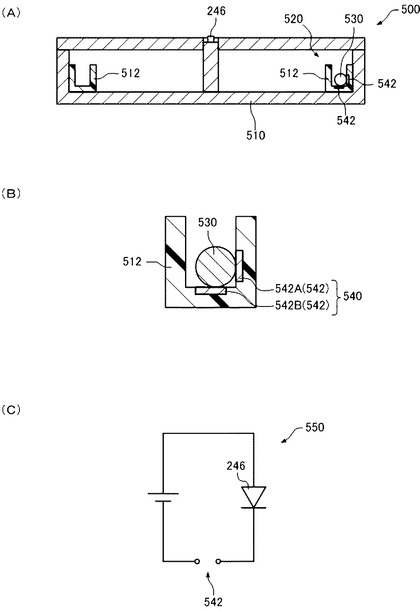
本変形例では、攪拌脱泡装置1は、図11(A)〜図11(C)に示す、センサユニット500を有する。センサユニット500は、筐体510と、筐体510に収納された回転センサ520とを有する。本実施の形態では、回転センサ520は、被検出子530及び検出子540を含んで構成されている。以下、センサユニット500の構成について説明する。
【0083】
(8−2−1)被検出子530
センサユニット500の被検出子530は、筐体510の中央部(自転軸線L2)を囲むように延びる移動経路に沿って移動可能に保持されている。なお、移動経路は、ガイド512によって区画される領域である。そして、被検出子530は、後述する一組の(対となる)電極端子542を電気的に接続するための導電部を有する。なお、本実施の形態では、被検出子530は、その全体が導電体によって構成される。
【0084】
(8−2−2)検出子540
センサユニット500の検出子540は、一組の電極端子542(542A及び542B)を有する。そして、電極端子542は、図11(A)及び図11(B)に示すように、移動経路の所定の領域に配置され、被検出子530が移動経路の特定の領域に存在しているときに(特定の領域を通過するときに)、被検出子530が電極端子542A及び542Bに接触し、両者が電気的に接続される。
【0085】
なお、電極端子542A及び542Bは、被検出子530と接触することが可能ないずれかの位置に配置することができる。例えば図11(B)に示すように、電極端子542Aをガイド512の内側面(内側面のうち筐体510の中央側を向く面)に配置し、電極端子542Bをガイド512の底面に配置することが可能である。あるいは電極端子542A及び542Bを、筐体510の内壁面に配置することも可能である(図示せず)。
【0086】
また、センサユニット500は、電極端子542(542A及び542B)を一組のみ有している。ただし、本実施の形態はこれに限られず、センサユニット500を、複数組の電極端子542を有するように構成することも可能である(図示せず)。
【0087】
センサユニット500は、電気回路550を有する。図11(C)は、電気回路550について説明するための図である。電気回路550は、先述した一組の(対となる)電極端子542を有する。ここで、電極端子542(542A及び542B)が間隔をあけて配置されることから、電気回路550は開回路(すなわち、電流経路が開いており電流が流れない状態の回路)となる。なお、電気回路550では、電極端子542と発光部246とが電気的に接続されている。ただし電気回路550が開回路となっていることから、定常時において、発光部246は消灯状態となる。そして、電気回路550では、被検出子530と電極端子542A及び542Bとが接触しているときに、両端子が電気的に接続されて電気回路550が閉回路となり、発光部246が発光することになる。
【0088】
(8−2−3)センサユニット500の動作
次に、撹拌脱泡装置を動作させたときの、センサユニット500の動作について説明する。
【0089】
センサユニット500では、センサユニット400と同様に、センサユニット500が公転しながら自転すると、被検出子530と検出子540(電極端子542)とが相対的に回転し、その相対回転数は、センサユニット500の自転数に等しくなる。
【0090】
そして、センサユニット500によると、被検出子530が移動経路の特定の領域に存在しているときに(電極端子542A及び542Bに接触しているときに)、発光部246が発光する。すなわち、発光部246は、センサユニット500の自転数(すなわち収納容器100の自転数)に依拠したタイミングで発光・消灯を繰り返すことになる。
【0091】
このことから、センサユニット500を利用した場合でも、自転数検出部300によって、撹拌脱泡装置の動作時におけるセンサユニット500の自転数(すなわち収納容器100の自転数)を検出することが可能になる。
【符号の説明】
【0092】
1…攪拌脱泡装置、 10…筐体、 12…支持基板、 14…ベアリングユニット、
20…回転体、 22…回転筒、 30…容器ホルダ、 32…自転軸、 34…ベアリング、 54…モータ、 56…動力伝達機構、 62…自転ギア、 64…自転力付与ギア、 65…回転軸、 66…自転動力伝達機構、 68…回転軸、 70…第1補助ギア、 72…第2補助ギア、 74…ブレーキ、 90…制御手段、 92…CPU、 94…駆動制御部、 95…回転センサ、 96…自転制御部、 98…操作部、 99…表示部、 100…収納容器、 110…本体、 120…蓋体、 122…凹部、 200…センサユニット、 210…筐体、 212…中心軸、 214…ベアリング、 220…回転センサ、 230…被検出子、 232…回転部材、 234…中央部、 236…延設部、 240…検出子、 242…発光素子、 244…受光素子、 246…発光部、 250…電気回路、 252…スイッチ、 300…自転数検出部、 302…受光素子、 304…演算処理部、 400…センサユニット、 410…筐体、 412…ガイド、 420…回転センサ、 430…被検出子、 440…検出子、 442…コイル体、 500…センサユニット、 510…筐体、 520…回転センサ、 530…被検出子、 540…検出子、 542…電極端子、 550…電気回路、 L1…回転軸線、 L2…自転軸線、 M…材料
【技術分野】
【0001】
本発明は、回転センサ、特に、撹拌脱泡装置に利用される回転センサ、及び、撹拌脱泡装置に関する。
【背景技術】
【0002】
材料が収納された容器を公転させながら自転させることによって、容器内で材料を攪拌脱泡する装置(自転公転方式の攪拌脱泡装置)が知られている(例えば特許文献1参照)。この攪拌脱泡装置では、容器を公転させながら自転させることによって容器内の材料に作用する遠心力を利用して、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させて脱泡することができる。
【0003】
ところで、自転公転方式の撹拌脱泡装置では、材料の処理状況は材料を収納する容器の挙動(回転数:自転数及び公転数)の影響を受ける。そのため、材料を適切に処理するためには、容器の挙動を制御することが重要であるところ、容器の挙動と容器ホルダの挙動とを一致させる技術が開発されている(例えば特許文献2参照)。これらの技術によれば、容器ホルダの挙動を、容器の挙動とみなすことが可能である。このことから、従来、自転公転方式の撹拌脱泡装置では、容器ホルダの挙動を検出し、これを容器の挙動とみなしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-43568号公報
【特許文献2】特開平11-226376号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自転公転方式の撹拌脱泡装置において、容器の挙動(特に自転数)を直接検出することができれば、材料の処理状況をより正確に把握することができる。
【0006】
本発明の一つの態様は、自転公転方式の撹拌脱泡装置において、容器の挙動(特に自転数)を正確に把握することを可能にする回転センサ、及び、撹拌脱泡装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明に係る回転センサは、
所定の材料が収納された収納容器を公転させながら自転させることにより、前記材料を撹拌脱泡する装置に利用される回転センサであって、
前記収納容器の自転数を直接検出するように構成されている。
【0008】
本発明によると、収納容器の自転数を正確に検出することができることから、収納容器の挙動を正確に検知することが可能になる。そのため本発明によると、材料の処理状況を正確に把握することができるとともに、材料の処理履歴を正確に記録することが可能になる。
【0009】
(2)この回転センサにおいて、
前記収納容器が公転しながら自転する際に前記収納容器の自転数に依拠した回転数で相対的に回転する、検出子及び被検出子を有していてもよい。
【0010】
これにより、収納容器の自転数を直接検出することが可能になる。
【0011】
(3)この回転センサにおいて、
前記検出子及び被検出子の一方が、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記検出子及び被検出子の他の一方が、前記収納容器に対して回転可能に保持されて、前記収納容器の公転に伴って作用する遠心力によって、前記収納容器を公転させるための回転体に対して一定の姿勢を維持するように構成されていてもよい。
【0012】
かかる構成によると、収納容器が公転しながら自転する際に、収納容器の自転数に依拠した回転数で、検出子及び被検出子を相対的に回転させることができる。
【0013】
(4)この回転センサにおいて、
前記検出子は、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記被検出子は、前記収納容器の前記自転軸線を囲むように延びる経路に沿って移動可能に保持されており、前記収納容器の公転に伴って作用する遠心力によって、前記経路内を、前記収納容器の公転軸線から最も遠い領域に移動するように構成されていてもよい。
【0014】
かかる構成によると、収納容器が公転しながら自転する際に、収納容器の自転数に依拠した回転数で、検出子及び被検出子を相対的に回転させることができる。
【0015】
(5)この回転センサにおいて、
前記検出子は、発光素子及び受光素子を含み、
前記被検出子が、前記発光素子及び受光素子の間を通過するように構成されていてもよい。
【0016】
(6)この回転センサにおいて、
前記検出子はコイル部を有し、
前記被検出子は磁性体部を有してもよい。
【0017】
(7)この回転センサにおいて、
前記検出子は、一組の電極端子を含む電気回路を有し、
前記被検出子は、前記一組の電極に接触して前記電気回路を閉回路とする導体部を有してもよい。
【0018】
(8)本発明に係る回転センサユニットは、上記いずれかの回転センサを含む。
【0019】
(9)本発明に係る攪拌脱泡装置は、
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
前記収納容器の自転数を直接検出するための回転センサを含む。
【0020】
本発明によると、収納容器の自転数を正確に検出することができることから、収納容器の挙動を正確に検知することが可能になる。そのため本発明によると、材料の処理状況を正確に把握することができるとともに、材料の処理履歴を正確に記録することが可能になる。
【0021】
(10)この撹拌脱泡装置において、
所定の回転軸線を中心に公転しながら自転することが可能に構成された、前記収納容器を保持する容器ホルダと、
前記容器ホルダを駆動させる駆動部と、
前記駆動部の動作を制御する制御部と、
をさらに含み、
前記制御部は、前記回転センサからの情報に基づいて、前記駆動部の動作を制御してもよい。
【0022】
(11)この撹拌脱泡装置において、
前記制御部は、前記情報に基づいて、前記駆動部の動作を停止させてもよい。
【図面の簡単な説明】
【0023】
【図1】攪拌脱泡装置の構成を説明するための図。
【図2】攪拌脱泡装置の構成を説明するための図。
【図3】攪拌脱泡装置に適用可能な収納容器を説明するための図。
【図4】回転センサ(センサユニット)の構成を説明するための図。
【図5】回転センサ(センサユニット)の構成を説明するための図。
【図6】回転センサ(センサユニット)の動作を説明するための図。
【図7】自転数検出部について説明するための図。
【図8】攪拌脱泡方法を説明するための図。
【図9】変形例に係る回転センサ(センサユニット)の構成を説明するための図。
【図10】変形例に係る回転センサ(センサユニット)の動作を説明するための図。
【図11】変形例に係る回転センサ(センサユニット)の構成を説明するための図。
【発明を実施するための形態】
【0024】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0025】
(1)攪拌脱泡装置1の構成
はじめに、本実施の形態に係る攪拌脱泡装置1の構成について、図1及び図2を参照しながら説明する。
【0026】
攪拌脱泡装置1は、図1に示すように、筐体10を有する。筐体10内部には、後述する種々の機構を支持するための支持基板12が、防振ばねを介して取り付けられている。筐体10は、図示しない開閉可能に構成されたドアを有し、当該ドアを開けると容器ホルダ30が露出して、容器ホルダ30に収納容器100を着脱することが可能になる。
【0027】
攪拌脱泡装置1は、図1に示すように、回転体20を含む。回転体20は、支持基板12(筐体10)に対して回転可能に構成されている。具体的には、攪拌脱泡装置1では、回転体20には回転筒22が固定されており、回転筒22が、ベアリングを介して、後述する回転軸65に保持された構成となっている。これにより、回転体20を、支持基板12に対して回転可能とすることができる。なお、攪拌脱泡装置1では、回転体20の回転軸線L1と、回転筒22及び回転軸65の延伸方向とは一致することになる。
【0028】
攪拌脱泡装置1は、図1に示すように、容器ホルダ30を含む。容器ホルダ30は、後述する収納容器100を保持する役割を果たす。容器ホルダ30は、回転体20の、回転軸線L1から所定間隔離れた位置に保持されている。これにより、容器ホルダ30は、回転体20の回転に伴って、回転軸線L1を中心に公転することとなる。
【0029】
容器ホルダ30は、回転体20に対して自転(回転)可能に保持される。具体的には、攪拌脱泡装置1では、容器ホルダ30には自転軸32が固定されており、自転軸32が、ベアリング34を介して回転体20に保持された構成となっている。これにより、容器ホルダ30が、回転体20に対して自転可能となる。
【0030】
なお、本実施の形態では、容器ホルダ30は、その自転軸線L2が、回転軸線L1(公転軸線)と斜めに交差するように構成されている。具体的には、攪拌脱泡装置1は、自転軸線L2が回転軸線L1と45度の角度で交差するように構成されている。ただし、変形例として、容器ホルダ30は、自転軸線L2が回転軸線L1と平行になるように、回転体20に取り付けることも可能である(図示せず)。
【0031】
本実施の形態では、回転体20には、バランス錘36が取り付けられている。バランス錘36は、回転軸線L1からの距離を変更することが可能に構成することができ、バランス錘36によって、攪拌脱泡装置1を安定して動作させることができる。ただし変形例として、攪拌脱泡装置を、一つの回転体20に、複数の容器ホルダが取り付けられた構成とすることも可能である(図示せず)。この場合、複数の容器ホルダは、回転軸線L1を中心とする点対称の配置となるように取り付けることができる。
【0032】
攪拌脱泡装置1は、容器ホルダ30を公転させながら自転させる回転駆動機構(容器ホルダ30を駆動させるための駆動機構)を含む。以下、回転駆動機構の構成について説明する。
【0033】
回転駆動機構は、公転駆動機構を有する。公転駆動機構は、回転体20を回転させることによって、容器ホルダ30を、回転軸線L1を中心に公転させる。本実施の形態では、公転駆動機構は、モータ54と、モータ54の動力を回転筒22に伝達する動力伝達機構56によって実現されている。なお、モータ54は、インダクションモータやサーボモータ、あるいはPMモータなど、既に公知となっているいずれかのモータを利用することが可能である。また、動力伝達機構56は、ギアや、プーリ及びベルト等、既に公知となっているいずれかの動力伝達要素により実現することができる。
【0034】
回転駆動機構は、また、自転力付与機構を有する。本実施の形態では、自転力付与機構は、容器ホルダ30の公転に伴って(回転体20の回転に伴って)、容器ホルダ30に自転力を付与するように構成されている。
【0035】
自転力付与機構は、自転ギア62を有する。自転ギア62は容器ホルダ30に固定されており、容器ホルダ30と一体的に挙動する。また、自転力付与機構は自転力付与ギア64を有する。自転力付与ギア64は、ベアリングユニット14に保持された回転軸65に固定されており、これにより、自転力付与ギア64は、支持基板12に対して回転可能となる。なお、先述したように、回転筒22は、ベアリングを介して回転軸65に保持されている。そのため、自転力付与ギア64と回転筒22とは、同心に、かつ、独立した回転数で回転することが可能になる。そして、自転力付与機構は、自転ギア62と自転力付与ギア64との間で動力を伝達する自転動力伝達機構66を有する。本実施の形態では、自転動力伝達機構66は、回転体20に回転可能に取り付けられた回転軸68と、回転軸68に固定された第1補助ギア70及び第2補助ギア72とを含んで構成されている。
【0036】
そして、自転力付与機構は、自転力付与ギア64の回転数を調整するためのブレーキ74を有する。ブレーキ74は、例えばパウダブレーキやディスクブレーキ、油圧ブレーキ等、既に公知となっているいずれかのブレーキ装置を適用することができる。自転力付与機構によると、自転動力伝達機構66によって、自転ギア62の回転数と自転力付与ギア64の回転数とが関連付けられる。そのため、自転ギア62を公転させながら(回転体20を回転させながら)自転力付与ギア64の回転数を規制することにより、自転ギア62を自転させることができる。例えば、自転力付与ギア64を自転ギア62の公転数と同じ回転数で回転させると、自転ギア62は自転することなく公転のみすることになる。そして、自転力付与ギア64を自転ギア62の公転数と異なる回転数で回転させると、自転ギア62は公転しながら自転することになる。このことから、ブレーキ74で自転力付与ギア64の回転数を調整することによって、自転ギア62の自転数を調節することが可能になる。なお、本実施の形態の変形例として、ブレーキ74にかえてモータを利用して自転力付与ギア64の回転数を調整するように、攪拌脱泡装置を構成することも可能である(図示せず)。
【0037】
攪拌脱泡装置1は、回転センサ95(図2参照)をさらに備えた構成とすることが可能である。回転センサ95は、回転体20の回転数(容器ホルダ30の公転数)を検出することが可能に構成されている。回転センサ95を、容器ホルダ30の公転数及び自転数を検出する構成とすることも可能であり、容器ホルダ30の公転数のみを検出する構成とすることも可能である。
【0038】
攪拌脱泡装置1は、図2に示す制御手段90を含む。制御手段90は、攪拌脱泡装置1の動作を統括制御する役割を果たす。以下、制御手段90について説明する。図2は、制御手段90について説明するための図である。
【0039】
制御手段90は、マイクロプロセッサ(CPU92)と、公転駆動機構(モータ54)を制御する駆動制御部94と、自転力付与機構(ブレーキ74)の動作を制御する自転制御部96とを含む。そして、CPU92は、運転データ(例えば、材料Mの処理条件に合わせてユーザが入力したデータ)に基づいて駆動制御部94及び自転制御部96に各種の信号を出力することにより、攪拌脱泡装置1(容器ホルダ30を駆動させるための回転駆動機構)の動作を制御する。
【0040】
先述したように、攪拌脱泡装置1では、容器ホルダ30は回転体20の回転に伴って公転することから、モータ54の出力を制御することによって、容器ホルダ30の公転数が制御される。すなわち、モータ54の出力を制御することにより、容器ホルダ30を所望の公転数で公転させることが可能になる。
【0041】
例えばモータ54としてインダクションモータを採用する場合には、駆動制御部94は、インバータの動作を制御し、モータ54に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ54としてサーボモータを採用する場合には、駆動制御部94は、専用のドライバ及びハードウェアによって実現され、モータ54を所望の回転数で動作させるための各種処理を行う。また、駆動制御部94を、回転センサ95で検出された容器ホルダ30の回転数情報を取得し(例えばCPU92を介して取得し)、当該回転数情報に基づいて、回転体20の回転数を調整するための種々の処理を行うように構成することも可能である。
【0042】
また、攪拌脱泡装置1では、ブレーキ74の出力を制御することによって、容器ホルダ30の自転数が制御される。すなわち、ブレーキ74の出力を制御することにより、容器ホルダ30を所望の自転数で自転させることが可能になる。
【0043】
自転制御部96は、ブレーキ74のブレーキ力を調整する専用のドライバ及びハードウェアによって実現することができる。例えばブレーキ74としてパウダブレーキやディスクブレーキを利用する場合、自転制御部96は、ブレーキ74に印加される電圧を制御する電圧制御手段によって実現することができる。あるいは、ブレーキ74として油圧ブレーキを採用する場合には、自転制御部96は、油圧ブレーキに供給される油の流れを制御する流量制御手段によって実現することができる。また、自転制御部96を、後述する自転数検出部300で検出された収納容器100の自転数情報を取得し(例えばCPU92を介して取得し)、当該自転数情報に基づいて、容器ホルダ30の回転数を調整するための種々の処理を行うように構成することも可能である。
【0044】
そして、CPU92は、所定のタイミングで、駆動制御部94及び自転制御部96に各種の信号(容器ホルダ30の目標回転数データ等)を送信する処理を行う。これにより、容器ホルダ30を所望の回転数で回転させることができる。なお、CPU92は、自転数検出部300を介して収納容器100の自転数情報を取得し、回転センサ95を介して回転体20(容器ホルダ30)の回転数情報を取得して、これらの情報を駆動制御部94及び自転制御部96に送信する処理を行うことも可能である。具体的には、CPU92を、収納容器100の自転数情報及び容器ホルダ30の自転数情報に基づいて収納容器100の自転数と容器ホルダ30の自転数とを比較し、その差が所定値よりも大きくなったことを検出したときに、駆動制御部94及び自転制御部96の少なくとも一方に信号を送信し、容器ホルダ30の回転数を変化させる(例えば自転数を小さくする、公転数を大きくする等)ように構成することも可能である。
【0045】
また、CPU92は、自転数検出部300を介して取得した収納容器100の自転数情報、及び、回転センサ95を介して取得した回転体20の回転数情報(容器ホルダ30の回転数情報)を、経過時間と関連付けて図示しない記憶部に格納する処理を行うことも可能である。
【0046】
さらに、CPU92は、操作部98から入力された動作データを受け付けて、図示しない記憶部に格納する処理や、表示部99に各種情報(操作部98から入力された動作データや、攪拌脱泡装置1の運転状況等)を表示させるための処理を行う。
【0047】
(2)収納容器100
次に、本実施の形態に適用可能な収納容器100について、図3(A)及び図3(B)を参照して説明する。収納容器100は、材料(被攪拌脱泡材料)Mが収納される容器である。収納容器100は、図3(A)に示すように、例えば有底円筒状の本体110と、本体110に着脱可能な蓋体120とを含む構成とすることができる。そして、図3(B)に示すように、収納容器(本体110)の内部空間に、材料Mが収納される。収納容器100は、容器ホルダ30に着脱可能に構成されている。そして、収納容器100は、容器ホルダ30に保持されて容器ホルダ30の自転に伴って自転し、容器ホルダ30の公転に伴って公転する。なお、収納容器100は、容器ホルダ30に対する空回りを防止するための、空回り防止機構を備えた構成とすることも可能である(図示せず)。また、収納容器100の構成材料は特に限定されるものではなく、樹脂や金属など、既に公知となっているいずれかの材料によって構成された容器を利用することができる。
【0048】
本実施の形態では、収納容器100は、センサユニット200を保持することが可能に構成されている。具体的には、収納容器100では、蓋体120の上面側に凹部122が構成され、凹部122で、センサユニット200を保持するように構成されている(図3(B)参照)。
【0049】
(3)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤等の種々の材料を適用することができる。また、材料Mとして、液状の材料と粒状(粉状)の材料との混合材料を適用することも可能である。このとき、収納容器100には、材料Mとともに、粒状(粉状)材料を粉砕するための粉砕用メディア(例えばジルコニアボール)を収納することも可能である。
【0050】
(4)センサユニット200
次に、本実施の形態に適用可能なセンサユニット200について、図4(A)〜図6(D)を参照して説明する。なお、センサユニット200は、筐体210と、筐体210に収納された回転センサ220とを有し、先述した収納容器100(蓋体120に形成された凹部122)に保持されて、収納容器100と一体的に挙動する部材である。
【0051】
(4−1)被検出子230
センサユニット200は、被検出子230を含む。被検出子230は、図4(A)〜図4(C)に示すように、回転部材232を有する。回転部材232は、図4(A)に示すように、筐体210に固定された中心軸212に、ベアリング214を介して取り付けられている。これにより、回転部材232(被検出子230)は、筐体210に対して回転可能となる。回転部材232は、中央部234と、中央部234から延びる四個の延設部236とを含む(図4(B)及び図4(C)参照)。ただし回転部材232の外形はこれに限られるものではなく、検出子240の性質に合致した形状とすることができる。回転部材232は、また、後述する検出子240が検出可能ないずれかの材料で構成される。本実施の形態では、回転部材232は、発光素子242(後述)が発した光を遮断することが可能な材料、例えばアルミニウムなどの金属で構成することができる。ただし、本発明はこれに限られるものではなく、検出子240の構造に合致した材料で、回転部材232を構成することができる。
【0052】
被検出子230は、その重心が中央部234(中心軸212/自転軸線L2)からずれた位置に配置されるように構成される。本実施の形態では、図4(A)及び図4(C)に示すように、回転部材232には錘238が取り付けられている。具体的には、本実施の形態では、一つの錘238が、一つの延設部236の先端に取り付けられており、これによって、被検出子230の重心位置が、中心軸212からずれた位置となる。すなわち、錘238は、被検出子230を偏心させる役割を果たし、偏心錘と称することも可能である。
【0053】
(4−2)検出子240
センサユニット200は、検出子240を含む。検出子240は、筐体210に固定され、筐体210と一体的に挙動する。なお、検出子240は、筐体210の周縁部に(中心軸212からずれた位置に)配置される。これにより、検出子240は、筐体210(収納容器100)の自転に伴って、自転軸線L2を中心に回転(公転)することになる。検出子240は、図4(A)に示すように、発光素子242及び受光素子244を有する。発光素子242及び受光素子244は、所定の間隔をあけて対向するように配置されており、発光素子242が発した光を受光素子244が受光するように構成されている。そして、検出子240は、被検出子230(延設部236)が、発光素子242及び受光素子244の間を通過するように配置される。
【0054】
(4−3)その他の構成
センサユニット200は、発光部246を有する。発光部246は、例えば赤外線LEDによって実現することができる。本実施の形態では、発光部246は、中心軸212の上端に、光軸が自転軸線L2に沿って延びるように配置される(図1参照)。これにより、発光部246が、公転軌道上のいずれの位置にある場合でも、自転数検出部300の受光素子302(後述)が、発光部246からの光を受光することが可能になる。
【0055】
また、図5は、本実施の形態に係るセンサユニット200を実現することが可能な電気回路250を示す。図5に示す通り、センサユニット200では、スイッチ252をONにすると発光素子242及び発光部246が発光する。そして、延設部236が発光素子242及び受光素子244の間を通過し、発光素子242及び受光素子244の間で光が遮られるたびに、発光部246が消灯することになる。
【0056】
(4−4)センサユニット200の動作
次に、本実施の形態に係る攪拌脱泡装置1を動作させたときの、センサユニット200(回転センサ220)の動作について、図6(A)〜図6(D)を参照して説明する。
【0057】
攪拌脱泡装置1を動作させる準備として、材料Mが収納された収納容器100(センサユニット200が固定されたもの)を用意し、これを容器ホルダ30に保持させる(図1及び図3(B)参照)。そして、攪拌脱泡装置1を動作させて、容器ホルダ30を公転させながら自転させる。これにより、材料Mが撹拌脱泡処理される。
【0058】
ところで、本実施の形態では、センサユニット200は、収納容器100に固定される。そのため、収納容器100が公転しながら自転すると、センサユニット200(回転センサ220)も公転しながら自転することになる。
【0059】
ここで、センサユニット200(回転センサ220)が公転しながら自転すると、その公転及び自転の作用を受けて、回転センサ220の被検出子230及び検出子240が、自転数に依拠した回転数で相対的に回転することになる。以下、この作用について、図6(A)〜図6(D)を参照して詳述する。なお、図6(A)〜図6(D)は、センサユニット200が公転しながら自転する様子を模式的に示す図である。図6(A)〜図6(D)では、センサユニット200が一回自転するプロセスを四分割し、簡単のために、公転による遠心力が常に紙面右方向を向くように表現してある。
【0060】
先述したように、センサユニット200では、被検出子230の回転部材232には、錘238が取り付けられている。そのため、センサユニット200が公転すると、公転による遠心力の作用により、被検出子230には、錘238を回転軸線L1から最も遠い位置に向かって移動させようとする力が作用する。また、被検出子230(回転部材232)は、中心軸212を中心に回転可能に構成されている。このことから、センサユニット200が公転しながら自転すると、被検出子230(回転部材232)は、筐体210内で、図6(A)〜図6(D)に示すように、錘238が回転軸線L1から最も遠い位置に向かうように回転し、常に、回転体20に対して一定の姿勢を維持することになる。
【0061】
これに対して、センサユニット200では、検出子240は筐体210に固定される。そのため、センサユニット200が公転しながら自転すると、検出子240は、センサユニット200の自転に伴って、自転軸線L2を中心に、回転体20に対して回転(公転)する。
【0062】
以上のことから、本実施の形態では、センサユニット200が公転しながら自転すると、被検出子230と検出子240とが相対的に回転し、その相対回転数は、センサユニット200の自転数(回転体20に対する自転数)に等しくなる。
【0063】
そして、センサユニット200では、延設部236が発光素子242及び受光素子244の間を通過するたびに、発光部246が消灯することから、発光部246は、回転センサ220(すなわち収納容器100)の自転数に依拠したタイミングで発光・消灯を繰り返すことになる。
【0064】
(4−5)変形例
なお、センサユニット200の変形例として、被検出子を筐体210に固定し、検出子を筐体210に対して回転可能に構成することも可能である(図示せず)。
【0065】
(5)自転数検出部300
本実施の形態では、攪拌脱泡装置1には、自転数検出部300が取り付けられる(図1及び図2参照)。自転数検出部300は、攪拌脱泡装置1の動作時におけるセンサユニット200の自転数(すなわち収納容器100の自転数)を検出する役割を果たす。
【0066】
本実施の形態では、自転数検出部300は、図7に示すように、受光素子302と、演算処理部304とを含む。ここで、自転数検出部300は、受光素子302が光を受光しているときにのみ、演算処理部304に電流が流れるように構成されている。また、受光素子302は、発光部246からの光を受光するように配置される。かかる構成により、自転数検出部300の演算処理部304で、演算処理部304に流れる電流のON/OFFに基づいて(例えば、電流のON/OFFの回数データと、被検出子230の形状に関するデータ(延設部236の個数データ)及び時間データに基づいて)、収納容器100の自転数を示す自転数データを演算し、出力することが可能になる。
【0067】
なお、本実施の形態では、自転数検出部300(受光素子302)は、自転軸線L1と自転軸線L2の交点に配置されている(図1参照)。ただし、受光素子302の位置はこれに限られるものではなく、発光部246から出力された光を検出することが可能ないずれかの位置に配置することができる。また、自転数検出部300は、攪拌脱泡装置1の筐体10に対して着脱可能な構成とすることも可能である。また、本実施の形態では、攪拌脱泡装置1は、自転数検出部300から出力された自転数データは、CPU92に入力されるように構成されている(図2参照)。これにより、収納容器100の自転数データに基づいて、攪拌脱泡装置1の動作を統括制御することが可能になる。また、変形例として、演算処理部304の機能を、CPU92で実現することも可能である。そして、本実施の形態では、攪拌脱泡装置1と、回転センサ220(センサユニット200)、自転数検出部300をあわせて、攪拌脱泡装置と称することも可能である。
【0068】
(6)撹拌脱泡方法
次に、本実施の形態に係る材料Mの攪拌脱泡方法について、図8を参照して説明する。ここで、図8は、攪拌脱泡方法を説明するためのフローチャートである。
【0069】
本実施の形態に係る攪拌脱泡方法は、図8に示すように、材料Mが収納された収納容器100を容器ホルダ30に保持させる工程(ステップS10)と、攪拌脱泡装置1を運転して容器ホルダ30(収納容器100及び回転センサ220(センサユニット200))を公転させながら自転させる工程(ステップS12)とを含む。これにより、収納容器100内で、材料Mを攪拌脱泡することができる。そして、所定の終了条件を満たしたか否かを判断し(ステップS14)、満たしたと判断した時に(ステップS14におけるYesのときに)、容器ホルダ30の公転及び自転を停止させる処理(ステップS16)を行う。なお、終了条件は、材料Mの性質や処理条件に合わせて設定することができる。例えば終了条件として、収納容器100の自転回数の積算量を採用することができる。あるいは、終了条件として、収納容器100の自転数が所定値(例えば1000rpm)を越えた状態における、収納容器100の自転回数の積算量を採用することができる。ただし本発明はこれに限られるものではなく、終了条件として、容器ホルダ30の回転時間を採用することも可能である。
【0070】
(7)作用効果
次に、本実施の形態が奏する作用効果について説明する。
本実施の形態によると、回転体20や容器ホルダ30の回転数に関するデータを利用することなく、センサユニット200によって、収納容器100の挙動(自転数)を直接検出することが可能になる。そのため、収納容器100内の材料Mの処理状況を正確に把握することができる。このことから、攪拌脱泡装置1によると、材料Mを所望の状態に撹拌脱泡処理することが可能になるとともに、材料Mの処理履歴を正確に記録することが可能になる。
【0071】
(8)変形例
以下、本実施の形態の変形例について説明する。
【0072】
(8−1)第1の変形例
本変形例では、攪拌脱泡装置1は、図9(A)〜図9(C)に示す、センサユニット400を有する。センサユニット400は、筐体410と、筐体410に収納された回転センサ420とを有する。本実施の形態では、回転センサ420は、被検出子430及び検出子440を含んで構成されている。以下、センサユニット400の構成について説明する。
【0073】
(8−1−1)被検出子430
センサユニット400は、被検出子430を有する。被検出子430は、図9(B)に示すように、筐体410の中央部(自転軸線L2)を囲むように延びるループ状の移動経路Cに沿って移動可能に保持されている。本実施の形態では、図9(A)及び図9(B)に示すように、筐体410はガイド412を有し、ガイド412によって移動経路Cが区画される。なお、センサユニット400では、ガイド412は、移動経路Cが、筐体410の中心部(容器ホルダ30の自転軸線L2)を中心とする円周形状となるように構成される。ただし本発明はこれに限られるものではなく、ガイド412を、移動経路Cが多角形となるように構成することも可能である(図示せず)。あるいは、筐体410(その内壁面)を利用することにより、特別なガイド412を設けることなく、センサユニットを実現することも可能である(図示せず)。また、被検出子430は、磁性体(強磁性体)で構成される。本実施の形態では、被検出子430は、球状の磁性体によって実現することができる。
【0074】
(8−1−2)検出子440
センサユニット400は、検出子440を有する。検出子440は、筐体410に固定され、筐体410と一体的に挙動する。検出子440は、コイル体442を有する。コイル体442は、筐体410に固定される。詳しくは、コイル体442は、筐体410の中心から所定の間隔をあけた位置に固定される。コイル体442は、図9(C)に示すように、発光部246と電気的に接続されている。なお、検出子440は、図9(C)に示すように、発光部246を発光させるための特別な電源を有さずに構成されている。
【0075】
本実施の形態では、センサユニット400は、被検出子430が移動経路Cの所定の領域を通過する際に、コイル体442に、発光部246を発光させるに足る誘導電流が発生するように設計される。このとき、センサユニット400の自転数が所定の値(例えば100rpm)を越えた場合にのみ、発光部246が発光するように、センサユニット400を設計することも可能である。具体的な設計は、コイル体442の巻き数及び移動経路C(被検出子430)からの距離、並びに、コイル体442と被検出子430の素材の組み合わせを調整することによって実現することができる。なお、センサユニット400は、コイル体442を一つのみ有するように構成することも可能であり、これを複数有するように構成することも可能である。また、コイル体442を複数有するように構成する場合、すべてのコイル体442の感度を同じとしてもよく、感度に差をつけてもよい。なお、コイル体442の感度は、コイル体442の巻き数や移動経路Cとの間隔、コイル体442の構成材料によって調整することができる。
【0076】
(8−1−3)センサユニット400の動作
次に、撹拌脱泡装置を動作させたときの、センサユニット400の動作について、図10(A)〜図10(D)を参照して説明する。
【0077】
先述したように、センサユニット400では、被検出子430は、移動経路Cに沿って移動可能に保持されている。また、センサユニット400が公転すると、公転による遠心力の作用により、被検出子430は、回転軸線L1から最も遠い位置に向かう力が作用する。このことから、センサユニット400が公転しながら自転すると、被検出子430は、移動経路Cに沿って、常に、回転軸線L1から最も遠い位置に移動することになる。そのため、センサユニット400が公転しながら自転すると、被検出子430は、常に、回転体20に対して(ほぼ)一定の位置に配置されることになる。
【0078】
これに対して、センサユニット400では、検出子440(コイル体442)は筐体410に固定される。そのため、センサユニット400が公転しながら自転すると、検出子440は、センサユニット400の自転に伴って、回転体20に対して回転する。
【0079】
このことから、センサユニット400が公転しながら自転すると、被検出子430と検出子440とが相対的に回転し、その相対回転数は、センサユニット400の自転数に等しくなる(図10(A)〜図10(D)参照)。
【0080】
そして、センサユニット400によると、被検出子430が移動経路Cの所定領域を通過するたびに(被検出子430がコイル体442に近接又は離間するたびに)、コイル体442が誘導電流を発生し、これによって発光部246が発光する。すなわち、発光部246は、センサユニット400の自転数(すなわち収納容器100の自転数)に依拠したタイミングで発光・消灯を繰り返すことになる。
【0081】
このことから、センサユニット400を利用した場合でも、自転数検出部300によって、撹拌脱泡装置の動作時におけるセンサユニット400の自転数(すなわち収納容器100の自転数)を検出することが可能になる。特に、センサユニット400によると、発光部246を発光させるための電源が不要になるため、その構成を単純化することが可能になる。
【0082】
(8−2)第2の変形例
本変形例では、攪拌脱泡装置1は、図11(A)〜図11(C)に示す、センサユニット500を有する。センサユニット500は、筐体510と、筐体510に収納された回転センサ520とを有する。本実施の形態では、回転センサ520は、被検出子530及び検出子540を含んで構成されている。以下、センサユニット500の構成について説明する。
【0083】
(8−2−1)被検出子530
センサユニット500の被検出子530は、筐体510の中央部(自転軸線L2)を囲むように延びる移動経路に沿って移動可能に保持されている。なお、移動経路は、ガイド512によって区画される領域である。そして、被検出子530は、後述する一組の(対となる)電極端子542を電気的に接続するための導電部を有する。なお、本実施の形態では、被検出子530は、その全体が導電体によって構成される。
【0084】
(8−2−2)検出子540
センサユニット500の検出子540は、一組の電極端子542(542A及び542B)を有する。そして、電極端子542は、図11(A)及び図11(B)に示すように、移動経路の所定の領域に配置され、被検出子530が移動経路の特定の領域に存在しているときに(特定の領域を通過するときに)、被検出子530が電極端子542A及び542Bに接触し、両者が電気的に接続される。
【0085】
なお、電極端子542A及び542Bは、被検出子530と接触することが可能ないずれかの位置に配置することができる。例えば図11(B)に示すように、電極端子542Aをガイド512の内側面(内側面のうち筐体510の中央側を向く面)に配置し、電極端子542Bをガイド512の底面に配置することが可能である。あるいは電極端子542A及び542Bを、筐体510の内壁面に配置することも可能である(図示せず)。
【0086】
また、センサユニット500は、電極端子542(542A及び542B)を一組のみ有している。ただし、本実施の形態はこれに限られず、センサユニット500を、複数組の電極端子542を有するように構成することも可能である(図示せず)。
【0087】
センサユニット500は、電気回路550を有する。図11(C)は、電気回路550について説明するための図である。電気回路550は、先述した一組の(対となる)電極端子542を有する。ここで、電極端子542(542A及び542B)が間隔をあけて配置されることから、電気回路550は開回路(すなわち、電流経路が開いており電流が流れない状態の回路)となる。なお、電気回路550では、電極端子542と発光部246とが電気的に接続されている。ただし電気回路550が開回路となっていることから、定常時において、発光部246は消灯状態となる。そして、電気回路550では、被検出子530と電極端子542A及び542Bとが接触しているときに、両端子が電気的に接続されて電気回路550が閉回路となり、発光部246が発光することになる。
【0088】
(8−2−3)センサユニット500の動作
次に、撹拌脱泡装置を動作させたときの、センサユニット500の動作について説明する。
【0089】
センサユニット500では、センサユニット400と同様に、センサユニット500が公転しながら自転すると、被検出子530と検出子540(電極端子542)とが相対的に回転し、その相対回転数は、センサユニット500の自転数に等しくなる。
【0090】
そして、センサユニット500によると、被検出子530が移動経路の特定の領域に存在しているときに(電極端子542A及び542Bに接触しているときに)、発光部246が発光する。すなわち、発光部246は、センサユニット500の自転数(すなわち収納容器100の自転数)に依拠したタイミングで発光・消灯を繰り返すことになる。
【0091】
このことから、センサユニット500を利用した場合でも、自転数検出部300によって、撹拌脱泡装置の動作時におけるセンサユニット500の自転数(すなわち収納容器100の自転数)を検出することが可能になる。
【符号の説明】
【0092】
1…攪拌脱泡装置、 10…筐体、 12…支持基板、 14…ベアリングユニット、
20…回転体、 22…回転筒、 30…容器ホルダ、 32…自転軸、 34…ベアリング、 54…モータ、 56…動力伝達機構、 62…自転ギア、 64…自転力付与ギア、 65…回転軸、 66…自転動力伝達機構、 68…回転軸、 70…第1補助ギア、 72…第2補助ギア、 74…ブレーキ、 90…制御手段、 92…CPU、 94…駆動制御部、 95…回転センサ、 96…自転制御部、 98…操作部、 99…表示部、 100…収納容器、 110…本体、 120…蓋体、 122…凹部、 200…センサユニット、 210…筐体、 212…中心軸、 214…ベアリング、 220…回転センサ、 230…被検出子、 232…回転部材、 234…中央部、 236…延設部、 240…検出子、 242…発光素子、 244…受光素子、 246…発光部、 250…電気回路、 252…スイッチ、 300…自転数検出部、 302…受光素子、 304…演算処理部、 400…センサユニット、 410…筐体、 412…ガイド、 420…回転センサ、 430…被検出子、 440…検出子、 442…コイル体、 500…センサユニット、 510…筐体、 520…回転センサ、 530…被検出子、 540…検出子、 542…電極端子、 550…電気回路、 L1…回転軸線、 L2…自転軸線、 M…材料
【特許請求の範囲】
【請求項1】
所定の材料が収納された収納容器を公転させながら自転させることにより、前記材料を撹拌脱泡する装置に利用される回転センサであって、
前記収納容器の自転数を直接検出するように構成されている回転センサ。
【請求項2】
請求項1に記載の回転センサにおいて、
前記収納容器が公転しながら自転する際に前記収納容器の自転数に依拠した回転数で相対的に回転する、検出子及び被検出子を有する回転センサ。
【請求項3】
請求項2に記載の回転センサにおいて、
前記検出子及び被検出子の一方が、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記検出子及び被検出子の他の一方が、前記収納容器に対して回転可能に保持されて、前記収納容器の公転に伴って作用する遠心力によって、前記収納容器を公転させるための回転体に対して一定の姿勢を維持するように構成されている回転センサ。
【請求項4】
請求項2に記載の回転センサにおいて、
前記検出子は、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記被検出子は、前記収納容器の前記自転軸線を囲むように延びる経路に沿って移動可能に保持されており、前記収納容器の公転に伴って作用する遠心力によって、前記経路内を、前記収納容器の公転軸線から最も遠い領域に移動するように構成されている回転センサ。
【請求項5】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子は、発光素子及び受光素子を含み、
前記被検出子が、前記発光素子及び受光素子の間を通過するように構成されている回転センサ。
【請求項6】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子はコイル部を有し、
前記被検出子は磁性体部を有する回転センサ。
【請求項7】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子は、一組の電極端子を含む電気回路を有し、
前記被検出子は、前記一組の電極に接触して前記電気回路を閉回路とする導体部を有する回転センサ。
【請求項8】
請求項1から請求項7のいずれかに記載の回転センサを含む回転センサユニット。
【請求項9】
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
前記収納容器の自転数を直接検出するための回転センサを含む撹拌脱泡装置。
【請求項10】
請求項9に記載の撹拌脱泡装置において、
所定の回転軸線を中心に公転しながら自転することが可能に構成された、前記収納容器を保持する容器ホルダと、
前記容器ホルダを駆動させる駆動部と、
前記駆動部の動作を制御する制御部と、
をさらに含み、
前記制御部は、前記回転センサからの情報に基づいて、前記駆動部の動作を制御する撹拌脱泡装置。
【請求項11】
請求項10に記載の撹拌脱泡装置において、
前記制御部は、前記情報に基づいて、前記駆動部の動作を停止させる撹拌脱泡装置。
【請求項1】
所定の材料が収納された収納容器を公転させながら自転させることにより、前記材料を撹拌脱泡する装置に利用される回転センサであって、
前記収納容器の自転数を直接検出するように構成されている回転センサ。
【請求項2】
請求項1に記載の回転センサにおいて、
前記収納容器が公転しながら自転する際に前記収納容器の自転数に依拠した回転数で相対的に回転する、検出子及び被検出子を有する回転センサ。
【請求項3】
請求項2に記載の回転センサにおいて、
前記検出子及び被検出子の一方が、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記検出子及び被検出子の他の一方が、前記収納容器に対して回転可能に保持されて、前記収納容器の公転に伴って作用する遠心力によって、前記収納容器を公転させるための回転体に対して一定の姿勢を維持するように構成されている回転センサ。
【請求項4】
請求項2に記載の回転センサにおいて、
前記検出子は、前記収納容器に固定されて、前記収納容器の自転に伴って前記収納容器の自転軸線を中心に回転するように構成され、かつ、
前記被検出子は、前記収納容器の前記自転軸線を囲むように延びる経路に沿って移動可能に保持されており、前記収納容器の公転に伴って作用する遠心力によって、前記経路内を、前記収納容器の公転軸線から最も遠い領域に移動するように構成されている回転センサ。
【請求項5】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子は、発光素子及び受光素子を含み、
前記被検出子が、前記発光素子及び受光素子の間を通過するように構成されている回転センサ。
【請求項6】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子はコイル部を有し、
前記被検出子は磁性体部を有する回転センサ。
【請求項7】
請求項2から請求項4のいずれかに記載の回転センサにおいて、
前記検出子は、一組の電極端子を含む電気回路を有し、
前記被検出子は、前記一組の電極に接触して前記電気回路を閉回路とする導体部を有する回転センサ。
【請求項8】
請求項1から請求項7のいずれかに記載の回転センサを含む回転センサユニット。
【請求項9】
材料が収納された収納容器を公転させながら自転させることによって前記材料を攪拌脱泡する攪拌脱泡装置であって、
前記収納容器の自転数を直接検出するための回転センサを含む撹拌脱泡装置。
【請求項10】
請求項9に記載の撹拌脱泡装置において、
所定の回転軸線を中心に公転しながら自転することが可能に構成された、前記収納容器を保持する容器ホルダと、
前記容器ホルダを駆動させる駆動部と、
前記駆動部の動作を制御する制御部と、
をさらに含み、
前記制御部は、前記回転センサからの情報に基づいて、前記駆動部の動作を制御する撹拌脱泡装置。
【請求項11】
請求項10に記載の撹拌脱泡装置において、
前記制御部は、前記情報に基づいて、前記駆動部の動作を停止させる撹拌脱泡装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−185693(P2011−185693A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−50172(P2010−50172)
【出願日】平成22年3月8日(2010.3.8)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月8日(2010.3.8)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
[ Back to top ]