
回転センサ
【課題】 加えられる回転変位(角度変位)の大きさに係わらず、回転検出対象の回転状態を確実に検出することができるようにする。
【解決手段】 回転センサは、円環状の環状容器11を有する。この環状容器11は、円環状の液体流路111を形成する。この液体流路111には、液体が封入されている。また、この液体流路111には、梁12が設けられている。この梁12は、環状容器11の回転に伴って生じる液体の流動によって変位させられる。この梁12には、歪みゲージ13が設けられている。この歪みゲージ13は、梁12の変位を検出する。この歪みゲージ12には、角加速度検出部20が接続されている。この角速度検出部20は、歪みゲージ12の検出出力に基づいて、回転検出対象の角加速度を検出する。
【解決手段】 回転センサは、円環状の環状容器11を有する。この環状容器11は、円環状の液体流路111を形成する。この液体流路111には、液体が封入されている。また、この液体流路111には、梁12が設けられている。この梁12は、環状容器11の回転に伴って生じる液体の流動によって変位させられる。この梁12には、歪みゲージ13が設けられている。この歪みゲージ13は、梁12の変位を検出する。この歪みゲージ12には、角加速度検出部20が接続されている。この角速度検出部20は、歪みゲージ12の検出出力に基づいて、回転検出対象の角加速度を検出する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、例えば、回転検出対象の回転状態を検出する回転センサに関する。
【0002】
【従来の技術】一般に、アーム型ロボット等においては、ロボットアーム等の姿勢を制御する姿勢制御装置が必要になる。
【0003】この姿勢制御装置を実現するためには、ロボットアーム等の姿勢を検出する姿勢センサが必要になる。
【0004】この姿勢センサとしては、例えば、ロボットアーム等の回転変位(角度変位)を検出する回転センサや直線変位を検出する直線センサ等がある。
【0005】アーム型ロボット等においては、上記回転センサとして、小型、計量で、角加速度も検出可能な回転センサが望まれている。
【0006】この要望に応えるため、従来、下記の文献に記載されるような姿勢センサ(回転センサ)が開発されている。文献:特開昭60−147611号公報
【0007】この文献に記載された回転センサは、「環状容器内に液体を封入し、その容器内の液体流路における対称位置に、質量及びばね成分を持つ弁構造体を対にして組み入れ、これらの弁構造体に、容器内液体の流動に伴って生じる弁構造体の変位を検出するためのストレンゲージまたは柔軟圧電フィルムを付設したこと」を特徴とするものである。
【0008】すなわち、この回転センサは、液体が封入された環状の液体流路に弁状の障害物を設け、液体の流動によって生じる障害物の変位を検出することにより、回転検出対象の角加速度を検出するようにしたものである。
【0009】このような構成によれば、液体の流動速度が環状容器に加えられる角速度に依存する。これにより、回転検出対象の角加速度を検出することができる。また、環状容器と、弁状の障害物と、歪みゲージによって回転センサの本体を構成することができる。これにより、回転センサを小型、軽量化することができる。
【0010】
【発明が解決しようとする課題】しかしながら、上記構成では、液体の流動によって変位させられる障害物として、弁状の障害物を用いているため、次のような2つの問題が予想される。
【0011】(1)第1の問題は、回転検出対象の回転に伴って回転センサに加えられる回転変位(角度変位)が大きい場合、回転検出対象の回転状態を検出することができないおそれがあるという問題である。ここで、回転状態とは、回転検出対象の回転変位、角度変位、回転速度、角速度、回転加速度、角加速度等をいう。
【0012】すなわち、上記構成では、障害物として、弁状の障害物が用いられる。具体的は、柔軟薄膜や面状弁が用いられる。しかしながら、弁状の障害物として、柔軟薄膜を用いた場合、環状容器に加えられる回転変位が大きいと、障害物の変位も大きくなるおそれがある。その結果、この変位が歪みゲージの計測範囲を超え、回転検出対象の回転状態を検出することができなくなるおそれがある。
【0013】(2)第2の問題は、回転センサに加えられる回転変位が微小な場合、回転状態の検出出力の応答性が低下するおそれがあるという問題である。
【0014】すなわち、上記構成では、障害物として、弁状の障害物が液体流路の2箇所に設けられる。これにより、液体流路が障害物によってほとんど塞がれる。その結果、環状容器に加えられる回転変位が微小な場合、液体の十分な流動が発生しないおそれがある。これにより、回転状態の検出出力の応答性が低下するおそれがある。
【0015】そこで、本発明は、加えられる回転変位の大きさに係わらず、回転検出対象の回転状態を確実に検出することができる回転センサを提供することを目的とする。
【0016】
【課題を解決するための手段】上記課題を解決するために請求項1記載の回転センサは、液体の流動によって変位させられる障害物として、大きな回転変位が加えられた場合でも変位がその計測範囲を超えることがないような剛性を有するとともに、液体の流動を妨げないような大きさを有する障害物を用いるようにしたものである。
【0017】請求項1記載の回転センサは、このような障害物として、梁を用いるようになっている。
【0018】すなわち、請求項1記載の回転センサは、液体流路形成手段と、少なくとも1つの梁と、変位検出手段とを備えたことを特徴とする。
【0019】ここで、液体流路形成手段は、環状の液体流路を形成する手段である。この液体流路形成手段は、回転検出対象に取り付けられる。また、梁は、上記液体流路に設けられる。この梁は、液体流路の中心軸を回転軸とする液体流路形成手段の回転によって生じる液体の流動によって変位させられる。変位検出手段は、梁の変位を検出する手段である。
【0020】この請求項1記載の回転センサでは、回転検出対象が回転すると、液体流路形成手段が回転する。この回転により、液体流路形成手段の液体流路に封入されている液体が流動する。この流動により、梁が液体から圧力を受ける。これにより、梁が変位する。この変位は、変位検出手段により検出される。
【0021】この場合、障害物として、弁ではなく、梁が用いられている。これにより、この障害物として、ある程度の剛性を持った障害物を用いることができる。その結果、液体流路形成手段に加えられる回転変位が大きい場合でも、障害物の変位を変位検出手段の計測範囲内に収めることができる。これにより、回転検出対象の回転状態を検出することができる。
【0022】また、このような構成によれば、障害物として、液体の流動をほとんど妨げないような障害物を用いることができる。これにより、液体流路形成手段に加えられる回転変位が微小な場合でも、液体が迅速に流動することができる。その結果、回転検出対象の回転状態の検出出力の応答性が低下することを防止することができる。
【0023】請求項2記載の回転センサは、請求項1記載のセンサにおいて、さらに、回転状態検出手段を備えたことを特徴とする。ここで、回転状態検出手段は、変位検出手段の検出出力に基づいて、回転検出対象の回転状態を検出する手段である。
【0024】この請求項2記載の回転センサでは、変位検出手段の検出出力に基づいて、回転検出対象の回転状態が検出される。これにより、回転センサの最終出力を得ることができる。
【0025】請求項3記載の回転センサは、請求項1または2記載のセンサにおいて、液体の流動方向に垂直な方向における梁の断面積が、同方向における液体流路の断面積の10%程度に設定されていることを特徴とする。
【0026】この請求項3記載の回転センサでは、液体の通過面積として、液体流路の垂直断面積の90%程度を確保することができる。これにより、梁によって液体の流動がほとんど妨げられることがないようにすることができる。
【0027】請求項4記載の回転センサは、請求項1,2または3記載のセンサにおいて、梁が液体流路の中央部に位置決めされていることを特徴とする。
【0028】この請求項4記載の回転センサでは、梁が、液体の質量が集中している領域に位置決めされる。これにより、梁を、液体流路形成手段に加わった回転変位に応じた液体の流動速度で変位させることができる。その結果、回転検出対象の回転状態を正確に検出することができる。
【0029】請求項5記載の回転センサは、請求項1,2,3または4記載のセンサにおいて、梁が液体の流動方向に垂直に支持されていることを特徴とする。
【0030】この請求項5記載の回転センサでは、液体の圧力が梁に垂直にかかる。これにより、液圧を効率的に受けることができる。その結果、梁を小さくすることができる。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0031】請求項6記載の回転センサは、請求項1,2,3,4または5記載のセンサにおいて、梁が長方形の平板状に形成されていることを特徴とする。
【0032】この請求項6記載の回転センサでは、梁が液圧を平面で受けることができる。これにより、液圧を効率的に受けることができる。その結果、梁を小さくすることができる。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0033】請求項7記載の回転センサは、請求項1,2,3,4,5または6記載のセンサにおいて、梁が片持梁であることを特徴とする。
【0034】この請求項7記載の回転センサでは、梁となる片の一端部を支持することにより、液体の流動によって変位させられる障害物を構成することができる。これにより、この障害物を簡単に構成することができる。
【0035】請求項8記載の回転センサは、請求項1,2,3,4,5,6または7記載のセンサにおいて、変位検出手段が歪みゲージであることを特徴とする。
【0036】この請求項8記載の回転センサでは、変位検出手段を梁に貼り付けることにより、梁の変位を検出することができる。これにより、液体流路形成手段の回転状態に影響されることなく、梁の変位を検出することができる。その結果、梁の変位を安定に検出することができる。
【0037】また、このような構成では、梁の変位とこの変位の検出出力との関係をリニアな特性曲線で表すことができる。これにより、梁の変位を正確に検出することができる。
【0038】請求項9記載の回転センサは、請求項2記載のセンサにおいて、回転状態検出手段が回転検出対象の角加速度を検出するように構成されていることを特徴とする。
【0039】この請求項9記載の回転センサでは、回転検出対象の回転状態として、角加速度が検出される。このような構成では、回転状態の検出出力を2度積分することにより、回転検出対象の角度変位を検出することができる。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0040】請求項10記載の回転センサは、請求項1,2,3,3,4,5,6,7,8または9記載のセンサにおいて、液体流路形成手段と、梁と、変位検出手段とが互いに直交する3つの軸の各軸ごとに設けられていることを特徴とする。
【0041】この請求項10記載の回転センサでは、並進加速度が加えられた場合、3つのセンサ本体(液体流路形成手段と、梁と、変位検出手段とからなる部分)のうち、2つのセンサ本体の変位検出手段から検出出力が得られる。これに対し、回転加速度が加えられた場合は、1つのセンサ本体の変位検出手段からしか検出出力が得られない。これにより、回転センサに加えられる加速度が並進加速度か角加速度かを識別することができる。その結果、回転センサに加えられる並進運動の影響を除去することができる。
【0042】
【発明の実施の形態】以下、図面を参照しながら、本発明の実施の形態を詳細に説明する。
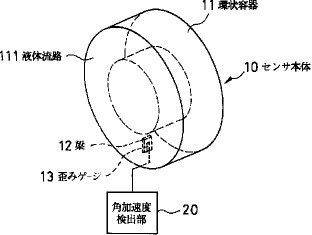
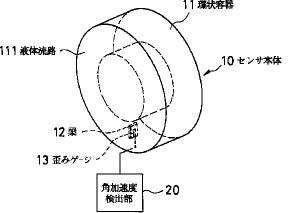
【0043】[1]一実施の形態[1−1]構成図1は、本発明の一実施の形態の構成を示す図である。
【0044】図示の回転センサは、センサ本体10と、角加速度検出部20とを有する。センサ本体10は、図示しない回転検出対象に取り付けられる。角加速度検出部20は、回転検出対象の角加速度を検出する。この角加速度検出部20は、例えば、回転検出対象以外の部分に設けられる。但し、センサ本体10と同様に、回転検出対象に取り付けてもよいことは勿論である。
【0045】上記センサ本体10は、環状容器11と、1つの梁12と、歪みゲージ13とを有する。ここで、環状容器11は、環状の液体流路111を形成する容器である。この環状容器11は、例えば、円環状に形成されている。液体流路111も、例えば、円環状に形成されている。この場合、液体流路111は、環状容器11と同軸的に形成されている。この液体流路111には、液体が封入されている。この場合、液体は、例えば、液体流路111を完全に満たすように封入されている。上記梁12は、液体流路111に設けられている。この梁12は、液体流路111の中心軸を回転軸とする環状容器111の回転によって生じる液体の流動によって変位させられる。上記歪みゲージ13は、梁12の変位(歪み)を検出する機能を有する。この歪みゲージ13は、例えば、梁12に貼り付けられている。
【0046】上記角加速度検出部20は、歪みゲージ13に接続されている。この角加速度検出部20は、歪みゲージ13の検出出力に基づいて、回転検出対象の角加速度を検出する。この角加速度検出部20は、例えば、コンピュータにより構成されている。
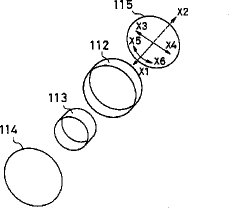
【0047】図2は、環状容器11の構成を示す分解斜視図である。図示のごとく、環状容器11は、例えば、2つの円筒112,113と、2つの円板114,115とを有する。ここで、円筒112,113の長さ(環状容器11の中心軸方向(図示矢印X1−X2)の寸法)は、同じ値に設定され、径は、異なる値に設定されている。また、円板113、114の径は、径の大きな円筒112の径と同じ値に設定されている。
【0048】上記円筒112,113は、同軸的に配設されている。また、上記円板114は、円筒112,113の一端部を塞ぐように、この一端部に取り付けられている。同様に、上記円板115は、円筒112,113の他端部を塞ぐように、この他端部に取り付けられている。これにより、液体の流動方向(図示矢印X5−X6方向)に垂直な方向の断面が四角形の環状容器11が形成される。言い換えれば、この垂直断面が四角形の液体流路111が形成される。
【0049】この液体流路111の幅(環状容器11の中心軸方向(図示矢印X1−X2方向)の寸法)は、円筒112,113の長さによって表される。また、この液体流路111の高さ(環状容器11の径方向(図示矢印X3−X4方向)の寸法)は、円筒112,113の半径の差によって表される。
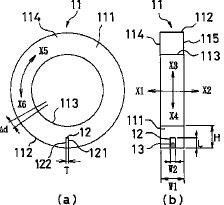
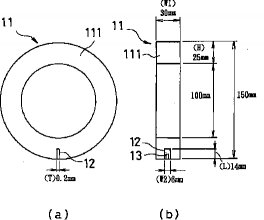
【0050】図3は、環状容器11の内部を示す断面図である。図において、(a)は、環状容器11を、その中心軸に垂直な平面で切断した場合の断面図を示し、(b)は、中心軸を含む平面で切断した場合の断面図を示す。図において、W1は、上述した液体流路111の幅を示し、Hは、同じく高さを示す。
【0051】図示のごとく、梁12は、例えば、長方形の平板状に形成されている。そして、この長方形の平板状の梁12は、一端部にて環状容器11の内壁に支持されている。これにより、本実施の形態では、梁12として、片持梁が用いられている。
【0052】この場合、梁12は、例えば、径の大きな円筒112の内壁に垂直に支持されている。これにより、梁12は、液体の流動方向(図示矢印X5−X6方向)に垂直に支持されている。また、梁12は、側面ではなく、上面121や下面122が液体の流動方向(図示矢印X5−X6方向)を向くように取り付けられている。さらに、梁12は、液体流路111の幅方向(図示矢印X1−X2方向)の中央部に取り付けられている。
【0053】梁12の長さL(環状容器11の径方向(図示矢印X3−X4方向)の寸法)は、例えば、液体流路111の高さHの50%程度に設定されている。また、梁12の幅W2(環状容器11の中心軸方向(図示矢印X1−X2方向)の寸法)は、液体流路111の幅の20%程度に設定されている。これにより、液体の流動方向(図示矢印X5−X6方向)に垂直な方向における梁12の断面積(梁12の上面121や下面122(図3(a)参照)の面積と同じ)は、例えば、同方向における液体流路111の断面積の10%程度に設定されている。
【0054】また、梁12の長さLは、例えば、梁12の幅W2の2〜2.5倍程度に設定されている。さらに、梁12の厚さT(液体の流動方向(図示矢印X5−X6方向)の寸法)は、幅W2の1オーダくらい下に設定されている。
【0055】さらに、梁12は、例えば、アクリルやアルミニウムによって構成されている。
【0056】上記歪みゲージ13としては、例えば、電気抵抗線式の歪みゲージが用いられている。この歪みゲージ13は、梁12の上面121と下面122のいずれか一方に貼り付けられている。これは、歪みゲージ13の性質より、上面121と下面122のいずれか一方に貼り付けることにより、梁12の図示矢印X5方向の変位と図示矢印X6方向の変位のいずれも検出することができるからである。
【0057】また、この歪みゲージ13は、梁12の根元部に貼り付けられている。これは、電気抵抗線式の歪みゲージ13は、金属線が伸びるとその電気抵抗が増加するという性質を利用して、梁12の変位を検出するものであるからである。すなわち、このような構成では、歪みゲージ13を変位が最大となる先端部ではなく、モーメントが最大となる根元部に設ける必要があるからである。
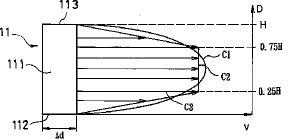
【0058】ここで、図4を参照しながら、梁12の長さLを、液体流路111の高さHの50%程度に設定した理由を説明する。図4は、液体の速度勾配と質量分布を示す特性図である。なお、図4では、環状容器11については、その長さ方向(図示矢印X5−X6方向)の微小区間Δd(図3参照)を拡大して示す。この場合、Δdは、非常に微小であるため、図4では、環状容器11の壁を直線で近似している。
【0059】図において、横軸は、液体の流動速度Vを示し、縦軸は、液体流路111の外縁から環状容器11の径方向に向かう距離Dを示す。また、特性曲線C1は、液体の実際の速度勾配を示し、特性曲線C2は、この速度勾配の近似曲線を示す。さらに、長方形C3で囲まれる領域は、液体の質量が集中している領域を示す。
【0060】図示のごとく、特性曲線C1は、液体流路111の高さH方向の中央部で最大となるような2次関数で表される。これは、液体流路111を流動する液体が、環状容器11の内壁から摩擦力を受けるからである。すなわち、この摩擦力は、液体流路111の周辺部で大きく、中央部で小さくなる。これにより、液体は、液体流路111の周辺部より中央部で多く流れる。その結果、液体の流動速度が、液体流路111の中央部で大きくなる。
【0061】今、この特性曲線C1を、特性曲線C2で近似するものとする。すなわち、台形で近似するものとする。この台形の上底は、2次関数の頂点側に位置決めされている。この上底の長さは、0.5Hに設定されている。
【0062】液体の速度勾配をこのように仮定した場合、液体の質量は、D=0.25H〜0.75Hの領域に集中する。これにより、梁12が液体から圧力を受けるのは、この領域ということになる。また、液体の速度勾配を上記のように仮定した場合、液体の質量は、D=0.25H〜0.75Hの領域で一定となる。これにより、梁12は、この領域で、液体から一定の圧力を受ける。
【0063】以上から、梁12の長さLを0.25H〜0.75Hに設定することにより、本センサの動特性解析(周波数応答解析)から、理論的に梁12の挙動を解析することができる。この場合、最も信頼性のある解析を行うことができるのは、梁12の長さLが0.5Hのときである。そこで、本実施の形態では、梁12の長さLを、上記のごとく、液体流路111の高さHの50%程度に設定している。
【0064】[1−2]動作上記構成において、動作を説明する。
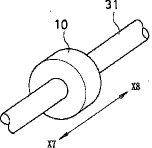
【0065】回転検出対象の角加速度を検出する場合、センサ本体10は、回転検出対象に取り付けられる。図5R>5にこの取付け方の一例を示す。図5には、センサ本体10を、例えば、ロボットアーム31に取り付ける場合を代表として示す。また、図5には、ロボットアーム31の長手方向(図示矢印X7−X8方向)の軸を回転軸とするこのアーム31の回転状態を検出する場合を代表として示す。この場合、センサ本体10は、例えば、環状容器11の中央の穴にロボットアーム31を挿入するようにして、このロボットアーム31に取り付けられる。
【0066】この状態で、回転検出対象(ロボットアーム31)が回転すると、環状容器11がその中心軸を回転軸として回転する。この回転により、環状容器11の液体流路111に封入されている液体がこの液体流路111に沿って流動する。この流動により、梁12が液体から圧力を受ける。これにより、梁12の先端部が変位する。この変位は、歪みゲージ13により検出される。この検出出力は、角加速度検出部20に供給される。これにより、回転検出対象の角加速度が検出される。
【0067】この検出は、例えば、テーブルを用いて行われる。このテーブルには、梁12の各変位Y(t)ごとに、回転検出対象の角加速度A(t)が記述されている。角加速度検出部14は、歪みゲージ13の検出出力に基づいて、テーブルを検索することにより、回転検出対象の角加速度A(t)を検出する。
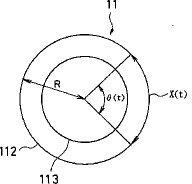
【0068】上記テーブルは、環状容器11に回転変位X(t)を加えたときの梁12の変位Y(t)を検出することにより作成される。これは、環状容器11の回転変位X(t)から回転検出対象の角加速度A(t)を求めることができるからである。これを、図6を参照しながら説明する。図6は、環状容器11に加えられる回転変位X(t)と角度変位θ(t)とを示す図である。
【0069】今、環状容器11に加えられる回転変位X(t)が、次式(1)で表されるものとする。
X(t)=X0sinωt …(1)
但し、X0は、回転変位X(t)の最大値を示す。また、ωは、角速度を示す。
【0070】この場合、環状容器11の角度変位θ(t)は、次式(2)で表される。
θ(t)=(X0/R)sinωt …(2)
但し、Rは、環状容器11の半径を示す。
【0071】これにより、環状容器11の角速度θ’(t)は、次式(3)で表される。
θ’(t)=(X0/R)ωcosωt …(3)
【0072】その結果、環状容器11の角加速度θ”(t)は、次式(4)で表される。
θ”(t)=−(X0/R)ω2sinωt …(4)
【0073】図5のように、回転検出対象(ロボットアーム31)と環状容器11の回転軸が同じ場合、この角加速度θ”(t)が回転検出対象の角加速度A(t)となる。これに対し、2つの回転軸が異なる場合は、環状容器11の角加速度θ”(t)に対して、所定の変換処理を施すことにより、回転検出対象の角加速度A(t)が求められる。
【0074】このようにして求められた回転検出対象の角加速度A(t)と、そのときの梁12の変位Y(t)とをテーブルに記述することにより、両者の対応関係を示すテーブルが作成される。
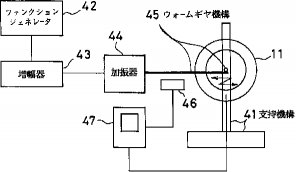
【0075】図7は、テーブル作成システム構成の構成の一例を示す図である。図示のテーブル作成システムは、支持機構41と、ファンクションジェネレータ42と、増幅器43と、加振器44と、ウォームギア機構45と、レーザ変位計46と、高速フーリエ変換アナライザ47とを有する。
【0076】ここで、支持機構41は、環状容器11をその中心軸の周りに回転自在に支持する機能を有する。ジェネレータ42は、正弦波信号を出力する機能を有する。増幅器33は、この正弦波信号を増幅する機能を有する。加振器43は、増幅された正弦波信号を直線振動に変換する機能を有する。ウォームギア機構45は、この直線振動を環状容器11の回転振動に変換する機能を有する。レーザ変位計46は、上記直線振動による直線変位を検出する機能を有する。アナライザ47は、レーザ変位計46の検出出力と歪みゲージ13の検出出力とに基づいて、上記テーブルを作成する機能を有する。
【0077】上記構成においては、ジェネレータ42から出力される正弦波信号は、増幅器43で増幅された後、加振器44に供給される。これにより、電気的な正弦波信号が機械的な直線振動に変換される。この直線振動は、ウォームギヤ機構45により、環状容器11の回転振動に変換される。この変換により、環状容器11が回転振動させられる。この回転振動により、液体流路111に封入されている液体が流動する。この流動により、梁12の先端部が歪む。この歪みは、歪みゲージ13により検出される。この検出出力は、アナライザ47に供給される。
【0078】また、これと並行して、レーザ変位計46により、直線振動の変位が検出される。この検出出力は、アナライザ47に供給される。これにより、環状容器11の回転変位X0(t)(式(1)参照)が算出される。この算出は、ウォームギヤ機構45の変換係数を用いて行われる。この算出出力は、環状容器11の角加速度θ”(t)に変換される。この角加速度θ”(t)は、回転検出対象の角加速度A(t)に変換される。そして、角加速度A(t)と歪みゲージ13により検出された梁12の変位Y(t)とがテーブルに記述される。これにより、角加速度A(t)と変位Y(t)との関係を示すテーブルが作成される。
【0079】[1−3]効果以上詳述した本実施の形態によれば、次のような効果を得ることができる。
【0080】(1)まず、本実施の形態によれば、液体の流動によって変位させられる障害物として、弁ではなく、梁12が用いられる。これにより、障害物として、ある程度の剛性を持った障害物を用いることができる。その結果、環状容器11に大きな回転変位X(t)が加わった場合でも、障害物(梁11)の変位Y(t)が歪みゲージ13の計測範囲から外れることがない。これにより、このような場合でも、回転検出対象の角加速度A(t)を検出することができる。
【0081】これを、一実施例を使って説明する。なお、本実施例では、回転センサとして、1mmオーダの微小な回転センサを用いた。このような回転センサは、例えば、運動生理学の観点から、人間の姿勢を検出する場合に用いられる。この場合、回転センサとしては、小型のものが要求される。これは、人間が回転センサを身に付けた場合、この回転センサが人間にとって邪魔にならないようにするためである。
【0082】但し、実際の実験では、1mmオーダの微小な回転センサではなく、拡大モデルを使った。図8は、この拡大モデルのサイズを示す断面図である。この図8は、センサ本体10を図3と同じようにして示した断面図である。
【0083】図示の拡大モデルでは、外側の円筒112の直径は、150mmに設定され、内側の円筒113の直径は、100mmに設定されている。これにより、流体流路111の高さHは、25mmに設定されている。また、円筒112,113の長さは、30mmに設定されている。これにより、流体流路111の幅W1は、30mmに設定されている。さらに、梁12の長さLは、14mmに設定され、幅W2は、6mmに設定され、厚さTは、0.2mmに設定されている。この梁12としては、アクリル製の梁を用いた。
【0084】また、この拡大モデルでは、液体流路111に封入される液体として、1万cStのシリコンオイルを用いた。これは、回転センサとして、1mmオーダの微小なセンサを用いる場合、液体として粘性の低い水を用いたとしても、梁12に働く力は、慣性力より液体の粘性力によって支配されるからである。すなわち、液体として、水を用いたとしても、梁12は、水飴のような粘性の高い液体の中にあるような挙動を示すからである。
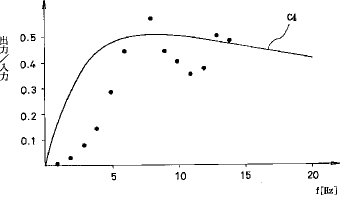
【0085】このような拡大モデルで、梁12の挙動を求める実験をした。この実験は、図7に示すようなシステムを用いて行った。この場合、梁12の挙動としては、梁12の変位Y(t)(出力)の周波数応答ではなく、これを環状容器11の回転変位X(t)で割ったもの、すなわち、Y(t)/X(t)(出力/入力)の周波数応答を求めた。この演算は、アナライザ37により行われる。
【0086】図9は、この実験結果を示す図である。図9において、横軸は、回転変位X(t)の周波数f(=ω/2π)を示し、縦軸は、出力/入力を示す。また、特性曲線C4は、計算により求められた周波数応答の理論値を示す。
【0087】この実験の結果、本実施例では、環状容器11の回転変位X(t)の周波数fが小さい場合、すなわち、この回転変位X(t)が大きい場合でも、梁12の変位Y(t)が歪みゲージ13の計測範囲に収まることが確かめられた。これにより、本実施例では、環状容器11の回転変位X(t)が大きい場合でも、回転検出対象の角加速度A(t)を検出することができる。
【0088】(2)また、本実施の形態によれば、液体の流動によって変位させられる障害物として、弁ではなく、梁12が用いられる。これにより、障害物として、液体の流動をほとんど妨げることがないような障害物を用いることができる。その結果、環状容器11に加わる回転変位X(t)が小さい場合でも、液体の流動が可能となる。これにより、このような場合でも、回転状態の検出出力の応答性が低下することを防止することができる。
【0089】(3)さらに、本実施の形態によれば、梁12の垂直断面の面積が液体流路111の垂直断面の面積の10%程度に設定されている。これにより、液体の通過面積として、液体流路111の垂直断面の面積の90%程度を確保することができる。その結果、梁12によって液体の流動が妨げられることがないようにすることができる。
【0090】(4)さらにまた、本実施の形態によれば、梁12が液体流路111の幅W1方向の中央部に設けられている。また、梁12の長さLが液体流路111の高さHの50%程度に設定されている。これらにより、本実施の形態では、梁12の先端部を液体流路111の中央部に設けることができる。その結果、梁12の先端部を液体の質量が集中している領域に位置決めすることができる。これにより、梁12を、環状容器11に加えられた回転変位X(t)に応じた圧力で変位させることができる。その結果、回転検出対象の回転状態を正確に検出することができる。
【0091】(5)また、本実施の形態によれば、梁12が液体の流動方向に垂直に支持されている。これにより、梁12に液体の圧力を垂直にかけることができる。その結果、梁12に液圧を効率的にかけることができる。これにより、梁12を小さくすることができる。その結果、梁12によって液体の流動を妨げない効果を高めることができる。
【0092】(6)さらに、本実施の形態によれば、梁12が長方形の平板状に形成されている。これにより、液圧を平面で受けることができる。その結果、梁12に液圧を効率的にかけることができる。これにより、梁12を小さくすることができる。その結果、梁12によって液体の流動を妨げない効果を高めることができる。
【0093】(7)さらにまた、本実施の形態によれば、梁12の長さLが幅W2の2〜2.5倍程度に設定されている。また、本実施の形態によれば、梁12の厚さTが幅W2の1オーダくらい下に設定されている。これらにより、変位Y(t)が歪みゲージ13の計測範囲を超えることがないような剛性を有する梁12を構成することができる。
【0094】(8)また、本実施の形態によれば、梁12として、片持梁が用いられる。これにより、長方形の平板の一端部を支持するだけで、目的の障害物を構成することができる。その結果、この障害物を簡単に構成することができる。また、梁12の材料として、固定梁を用いる場合より、弾性の高い材料を用いることができる。これにより、この場合より、変位が計測範囲を超えないようにするための寸法等の設定が容易となる。さらに、単純梁を用いる場合に比べ、確実に歪みゲージ13の出力を得ることができる。
【0095】(9)さらに、本実施の形態によれば、変位検出手段として、歪みゲージ13が用いられる。これにより、変位検出手段を梁12に貼り付けるだけで、梁12の変位Y(t)を検出することができる。その結果、環状容器11の回転状態に影響されることなく、梁12の変位Y(t)を検出することができる。これにより、梁12の変位Y(t)を安定に検出することができる。また、このような構成によれば、梁12の変位Y(t)とこの変位Y(t)の検出出力との関係をリニアな特性曲線で表すことができる。これにより、梁12の変位Y(t)を正確に検出することができる。
【0096】(10)さらにまた、本実施の形態によれば、回転検出対象の回転状態として、角加速度A(t)が検出される。このような構成では、回転状態の検出出力を2度積分することにより、回転検出対象の角度変位を検出することができる。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0097】[1−4]その他の実施の形態以上、本発明の一実施の形態を詳細に説明した。しかしながら、本発明は、先の実施の形態に限定されるものではない。
【0098】(1)例えば、先の実施の形態では、梁12を外側の円筒112の内壁に固定する場合を説明した。しかしながら、本発明は、例えば、内側の円筒113の外壁、または、円板114,115の内壁に固定するようにしてもよい。
【0099】(2)また、先の実施の形態では、梁12として、長方形の平板を用いる場合を説明した。しかしながら、本発明は、例えば、円柱状の梁を用いるようにしてもよい。
【0100】(3)さらに、先の実施の形態では、梁12として、片持梁を用いる場合を説明した。しかしながら、本発明は、単純梁(両端支点梁)、固定梁、連続梁等を用いるようにしてもよい。
【0101】(4)さらにまた、先の実施の形態では、梁12を1つ設ける場合を説明した。しかしながら、本発明では、これを複数設けるようにしてもよい。この場合、梁12を、環状容器11の回転軸を中心とする点対称位置に2つ設けるようにすれば、環状容器11の並進運動の影響を除去することができる。
【0102】(5)また、先の実施の形態では、液体流路として、終端のない液体流路111を用いる場合を説明した。しかしながら、本発明は、液体の流動に影響を与えなければ、終端のある液体流路11を用いるようにしてもよい。
【0103】(6)さらに、先の実施の形態では、液体流路として、円環状の液体流路111を用いる場合を説明した。しかしながら、本発明は、液体の流動に影響を与えない環状の液体流路でれば、円環状以外の液体流路を用いるようにしてもよい。例えば、多角形状や楕円状の液体流路を用いるようにしてもよい。
【0104】(7)さらにまた、先の実施の形態では、液体流路形成手段として、環状容器11を用いる場合を説明した。しかしながら、本発明は、環状の液体流路を形成することができるものであれば、環状容器11以外の容器または容器以外の物を用いるようにしてもよい。例えば、環状の液体流路を有する平板状の容器を用いるようにしてもよい。
【0105】(8)また、先の実施の形態では、液体流路として、垂直断面が四角形の液体流路111を用いる場合を説明した。しかしながら、本発明は、四角形以外の形状の液体流路を用いるようにしてもよい。例えば、多角形または円形の液体流路を用いるようにしてもよい。
【0106】(9)さらに、先の実施の形態では、回転検出対象の回転状態として、角加速度A(t)を検出する場合を説明した。しかしながら、本発明は、回転変位、角度変位、回転速度、角速度、回転加速度等を検出するようにしてもよい。
【0107】(10)さらにまた、先の実施の形態では、センサ本体10を1つの軸にのみ設ける場合を説明した。言い換えれば、回転センサとして、1軸角加速度センサを構成する場合を説明した。しかしながら、本発明は、センサ本体10を互いに直交する複数の軸の各軸ごとに設けるようにしてもよい。言い換えれば、複数軸角加速度センサを構成するようにしてもよい。この場合、互いに直交する3つの軸の各軸ごとにセンサ本体10を設けるようにすれば、回転センサに加えられる並進運動の影響を除去することができる。
【0108】すなわち、このような構成によれば、回転センサに並進加速度が加えられた場合、3つのセンサ本体10のうち、2つのセンサ本体10の歪みゲージ13から検出出力が得られる。これに対し、回転加速度が加えられた場合は、1つのセンサ本体10の歪みゲージ13からしか検出出力が得られない。これにより、回転センサに加えられる加速度が並進加速度か角加速度かを識別することができる。その結果、回転センサに加えられる並進運動の影響を除去することができる。
【0109】これを具体的に説明する。今、3つの直交する軸をx、y、zとし、このうち、例えば、x軸方向に並進加速度が加えられたとする。この場合、y軸用とz軸用のセンサ本体10の梁12が液体の流動により変位させられる。これは、この場合は、これら2つのセンサ本体10の梁12の向きが液体の流動方向に垂直になるからである。これに対し、x軸周りの角加速度が加えられると、x軸用のセンサ本体10の梁12が液体の流動により変位させられる。これは、この場合は、このセンサ本体10の梁12の向きが液体の流動方向に垂直になるからである。
【0110】以上により、3つのセンサ本体10の歪みゲージ13の検出出力を観察することにより、加えられた加速度がx軸方向の並進加速度かx軸周りの角加速度かを識別することができる。これにより、x軸方向の並進運動の影響を除去することができる。なお、これは、詳細な説明は省略するが、y軸方向やz軸方向の並進運動についても同様である。
【0111】(11)このほかにも本発明はその要旨を逸脱しない範囲で種々様々変形実施可能なことは勿論である。
【0112】
【発明の効果】以上詳述したように請求項1記載の回転センサによれば、液体の流動によって変位させられる障害物として梁が用いられる。これにより、加えられる回転変位の大きさに係わらず、回転検出対象の回転状態を確実に検出することができる。
【0113】また、請求項2記載の回転センサによれば、請求項1記載のセンサにおいて、さらに、回転状態検出手段が設けられる。これにより、回転センサの最終出力を得ることができる。
【0114】さらに、請求項3記載の回転センサによれば、請求項1または2記載のセンサにおいて、液体の流動方向に垂直な方向における梁の断面積が、同方向における液体流路の断面積の10%程度に設定されている。これにより、梁によって液体の流動がほとんど妨げられることがないようにすることができる。
【0115】さらにまた、請求項4記載の回転センサによれば、請求項1,2または3記載のセンサにおいて、梁が液体流路の中央部に位置決めされている。これにより、回転検出対象の回転状態を正確に検出することができる。
【0116】また、請求項5記載の回転センサによれば、請求項1,2,3,4または5記載のセンサにおいて、梁が液体の流動方向に垂直に支持されている。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0117】さらに、請求項6記載の回転センサによれば、請求項1,2,3,4または5記載のセンサにおいて、梁が長方形の平板状に形成されている。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0118】さらにまた、請求項7記載の回転センサによれば、請求項1,2,3,4,5または6記載のセンサにおいて、梁として、片持梁が用いられる。これにより、障害物を簡単に構成することができる。
【0119】また、請求項8記載の回転センサによれば、請求項1,2,3,4,5,6または7記載のセンサにおいて、変位検出手段として、歪みゲージが用いられる。これにより、梁の変位を安定にかつ正確に検出することができる。
【0120】さらに、請求項9記載の回転センサによれば、請求項2記載のセンサにおいて、回転検出対象の回転状態として、角加速度が検出される。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0121】さらにまた、請求項10記載の回転センサによれば、請求項1,2,3,4,5,6,7,8または9記載のセンサにおいて、液体流路形成手段と、梁と、変位検出手段とが互いに直交する3つの軸の各軸ごとに設けられる。これにより、梁が各液体流路形成手段ごとに1しか設けられない場合であっても、並進運動の影響を除去することができる。
【図面の簡単な説明】
【図1】本発明の一実施の形態の構成を示す図である。
【図2】本発明の一実施の形態における環状容器の構成を示す分解斜視図である。
【図3】本発明の一実施の形態におけるセンサ本体の構成を示す断面図である。
【図4】本発明の一実施の形態における液体の流動速度と質量分布を示す図である。
【図5】本発明の一実施の形態のセンサ本体の取付け方の一例を示す斜視図である。
【図6】本発明の一実施の形態において環状容器に加えられる回転変位と角度変位を示す図である。
【図7】本発明の一実施の形態において角加速度の検出に使用されるテーブルの作成システムの構成を示す図である。
【図8】本発明の一実施例における各部の寸法を示す断面図である。
【図9】本発明の一実施例における出力/入力の周波数応答特性を示す特性図である。
【符号の説明】
10…センサ本体、20…角加速度検出部、11…環状容器、111…液体流路、112,113…円筒、114,115…円板、12…梁、13…歪みゲージ、20…角速度検出部、31…支持機構、32…ファンクションジェネレータ、33…増幅器、34…加振器、35…ウォームギヤ機構、36…レーザ変位計、37…高速フーリエ変換アナライザ。
【0001】
【発明の属する技術分野】本発明は、例えば、回転検出対象の回転状態を検出する回転センサに関する。
【0002】
【従来の技術】一般に、アーム型ロボット等においては、ロボットアーム等の姿勢を制御する姿勢制御装置が必要になる。
【0003】この姿勢制御装置を実現するためには、ロボットアーム等の姿勢を検出する姿勢センサが必要になる。
【0004】この姿勢センサとしては、例えば、ロボットアーム等の回転変位(角度変位)を検出する回転センサや直線変位を検出する直線センサ等がある。
【0005】アーム型ロボット等においては、上記回転センサとして、小型、計量で、角加速度も検出可能な回転センサが望まれている。
【0006】この要望に応えるため、従来、下記の文献に記載されるような姿勢センサ(回転センサ)が開発されている。文献:特開昭60−147611号公報
【0007】この文献に記載された回転センサは、「環状容器内に液体を封入し、その容器内の液体流路における対称位置に、質量及びばね成分を持つ弁構造体を対にして組み入れ、これらの弁構造体に、容器内液体の流動に伴って生じる弁構造体の変位を検出するためのストレンゲージまたは柔軟圧電フィルムを付設したこと」を特徴とするものである。
【0008】すなわち、この回転センサは、液体が封入された環状の液体流路に弁状の障害物を設け、液体の流動によって生じる障害物の変位を検出することにより、回転検出対象の角加速度を検出するようにしたものである。
【0009】このような構成によれば、液体の流動速度が環状容器に加えられる角速度に依存する。これにより、回転検出対象の角加速度を検出することができる。また、環状容器と、弁状の障害物と、歪みゲージによって回転センサの本体を構成することができる。これにより、回転センサを小型、軽量化することができる。
【0010】
【発明が解決しようとする課題】しかしながら、上記構成では、液体の流動によって変位させられる障害物として、弁状の障害物を用いているため、次のような2つの問題が予想される。
【0011】(1)第1の問題は、回転検出対象の回転に伴って回転センサに加えられる回転変位(角度変位)が大きい場合、回転検出対象の回転状態を検出することができないおそれがあるという問題である。ここで、回転状態とは、回転検出対象の回転変位、角度変位、回転速度、角速度、回転加速度、角加速度等をいう。
【0012】すなわち、上記構成では、障害物として、弁状の障害物が用いられる。具体的は、柔軟薄膜や面状弁が用いられる。しかしながら、弁状の障害物として、柔軟薄膜を用いた場合、環状容器に加えられる回転変位が大きいと、障害物の変位も大きくなるおそれがある。その結果、この変位が歪みゲージの計測範囲を超え、回転検出対象の回転状態を検出することができなくなるおそれがある。
【0013】(2)第2の問題は、回転センサに加えられる回転変位が微小な場合、回転状態の検出出力の応答性が低下するおそれがあるという問題である。
【0014】すなわち、上記構成では、障害物として、弁状の障害物が液体流路の2箇所に設けられる。これにより、液体流路が障害物によってほとんど塞がれる。その結果、環状容器に加えられる回転変位が微小な場合、液体の十分な流動が発生しないおそれがある。これにより、回転状態の検出出力の応答性が低下するおそれがある。
【0015】そこで、本発明は、加えられる回転変位の大きさに係わらず、回転検出対象の回転状態を確実に検出することができる回転センサを提供することを目的とする。
【0016】
【課題を解決するための手段】上記課題を解決するために請求項1記載の回転センサは、液体の流動によって変位させられる障害物として、大きな回転変位が加えられた場合でも変位がその計測範囲を超えることがないような剛性を有するとともに、液体の流動を妨げないような大きさを有する障害物を用いるようにしたものである。
【0017】請求項1記載の回転センサは、このような障害物として、梁を用いるようになっている。
【0018】すなわち、請求項1記載の回転センサは、液体流路形成手段と、少なくとも1つの梁と、変位検出手段とを備えたことを特徴とする。
【0019】ここで、液体流路形成手段は、環状の液体流路を形成する手段である。この液体流路形成手段は、回転検出対象に取り付けられる。また、梁は、上記液体流路に設けられる。この梁は、液体流路の中心軸を回転軸とする液体流路形成手段の回転によって生じる液体の流動によって変位させられる。変位検出手段は、梁の変位を検出する手段である。
【0020】この請求項1記載の回転センサでは、回転検出対象が回転すると、液体流路形成手段が回転する。この回転により、液体流路形成手段の液体流路に封入されている液体が流動する。この流動により、梁が液体から圧力を受ける。これにより、梁が変位する。この変位は、変位検出手段により検出される。
【0021】この場合、障害物として、弁ではなく、梁が用いられている。これにより、この障害物として、ある程度の剛性を持った障害物を用いることができる。その結果、液体流路形成手段に加えられる回転変位が大きい場合でも、障害物の変位を変位検出手段の計測範囲内に収めることができる。これにより、回転検出対象の回転状態を検出することができる。
【0022】また、このような構成によれば、障害物として、液体の流動をほとんど妨げないような障害物を用いることができる。これにより、液体流路形成手段に加えられる回転変位が微小な場合でも、液体が迅速に流動することができる。その結果、回転検出対象の回転状態の検出出力の応答性が低下することを防止することができる。
【0023】請求項2記載の回転センサは、請求項1記載のセンサにおいて、さらに、回転状態検出手段を備えたことを特徴とする。ここで、回転状態検出手段は、変位検出手段の検出出力に基づいて、回転検出対象の回転状態を検出する手段である。
【0024】この請求項2記載の回転センサでは、変位検出手段の検出出力に基づいて、回転検出対象の回転状態が検出される。これにより、回転センサの最終出力を得ることができる。
【0025】請求項3記載の回転センサは、請求項1または2記載のセンサにおいて、液体の流動方向に垂直な方向における梁の断面積が、同方向における液体流路の断面積の10%程度に設定されていることを特徴とする。
【0026】この請求項3記載の回転センサでは、液体の通過面積として、液体流路の垂直断面積の90%程度を確保することができる。これにより、梁によって液体の流動がほとんど妨げられることがないようにすることができる。
【0027】請求項4記載の回転センサは、請求項1,2または3記載のセンサにおいて、梁が液体流路の中央部に位置決めされていることを特徴とする。
【0028】この請求項4記載の回転センサでは、梁が、液体の質量が集中している領域に位置決めされる。これにより、梁を、液体流路形成手段に加わった回転変位に応じた液体の流動速度で変位させることができる。その結果、回転検出対象の回転状態を正確に検出することができる。
【0029】請求項5記載の回転センサは、請求項1,2,3または4記載のセンサにおいて、梁が液体の流動方向に垂直に支持されていることを特徴とする。
【0030】この請求項5記載の回転センサでは、液体の圧力が梁に垂直にかかる。これにより、液圧を効率的に受けることができる。その結果、梁を小さくすることができる。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0031】請求項6記載の回転センサは、請求項1,2,3,4または5記載のセンサにおいて、梁が長方形の平板状に形成されていることを特徴とする。
【0032】この請求項6記載の回転センサでは、梁が液圧を平面で受けることができる。これにより、液圧を効率的に受けることができる。その結果、梁を小さくすることができる。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0033】請求項7記載の回転センサは、請求項1,2,3,4,5または6記載のセンサにおいて、梁が片持梁であることを特徴とする。
【0034】この請求項7記載の回転センサでは、梁となる片の一端部を支持することにより、液体の流動によって変位させられる障害物を構成することができる。これにより、この障害物を簡単に構成することができる。
【0035】請求項8記載の回転センサは、請求項1,2,3,4,5,6または7記載のセンサにおいて、変位検出手段が歪みゲージであることを特徴とする。
【0036】この請求項8記載の回転センサでは、変位検出手段を梁に貼り付けることにより、梁の変位を検出することができる。これにより、液体流路形成手段の回転状態に影響されることなく、梁の変位を検出することができる。その結果、梁の変位を安定に検出することができる。
【0037】また、このような構成では、梁の変位とこの変位の検出出力との関係をリニアな特性曲線で表すことができる。これにより、梁の変位を正確に検出することができる。
【0038】請求項9記載の回転センサは、請求項2記載のセンサにおいて、回転状態検出手段が回転検出対象の角加速度を検出するように構成されていることを特徴とする。
【0039】この請求項9記載の回転センサでは、回転検出対象の回転状態として、角加速度が検出される。このような構成では、回転状態の検出出力を2度積分することにより、回転検出対象の角度変位を検出することができる。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0040】請求項10記載の回転センサは、請求項1,2,3,3,4,5,6,7,8または9記載のセンサにおいて、液体流路形成手段と、梁と、変位検出手段とが互いに直交する3つの軸の各軸ごとに設けられていることを特徴とする。
【0041】この請求項10記載の回転センサでは、並進加速度が加えられた場合、3つのセンサ本体(液体流路形成手段と、梁と、変位検出手段とからなる部分)のうち、2つのセンサ本体の変位検出手段から検出出力が得られる。これに対し、回転加速度が加えられた場合は、1つのセンサ本体の変位検出手段からしか検出出力が得られない。これにより、回転センサに加えられる加速度が並進加速度か角加速度かを識別することができる。その結果、回転センサに加えられる並進運動の影響を除去することができる。
【0042】
【発明の実施の形態】以下、図面を参照しながら、本発明の実施の形態を詳細に説明する。
【0043】[1]一実施の形態[1−1]構成図1は、本発明の一実施の形態の構成を示す図である。
【0044】図示の回転センサは、センサ本体10と、角加速度検出部20とを有する。センサ本体10は、図示しない回転検出対象に取り付けられる。角加速度検出部20は、回転検出対象の角加速度を検出する。この角加速度検出部20は、例えば、回転検出対象以外の部分に設けられる。但し、センサ本体10と同様に、回転検出対象に取り付けてもよいことは勿論である。
【0045】上記センサ本体10は、環状容器11と、1つの梁12と、歪みゲージ13とを有する。ここで、環状容器11は、環状の液体流路111を形成する容器である。この環状容器11は、例えば、円環状に形成されている。液体流路111も、例えば、円環状に形成されている。この場合、液体流路111は、環状容器11と同軸的に形成されている。この液体流路111には、液体が封入されている。この場合、液体は、例えば、液体流路111を完全に満たすように封入されている。上記梁12は、液体流路111に設けられている。この梁12は、液体流路111の中心軸を回転軸とする環状容器111の回転によって生じる液体の流動によって変位させられる。上記歪みゲージ13は、梁12の変位(歪み)を検出する機能を有する。この歪みゲージ13は、例えば、梁12に貼り付けられている。
【0046】上記角加速度検出部20は、歪みゲージ13に接続されている。この角加速度検出部20は、歪みゲージ13の検出出力に基づいて、回転検出対象の角加速度を検出する。この角加速度検出部20は、例えば、コンピュータにより構成されている。
【0047】図2は、環状容器11の構成を示す分解斜視図である。図示のごとく、環状容器11は、例えば、2つの円筒112,113と、2つの円板114,115とを有する。ここで、円筒112,113の長さ(環状容器11の中心軸方向(図示矢印X1−X2)の寸法)は、同じ値に設定され、径は、異なる値に設定されている。また、円板113、114の径は、径の大きな円筒112の径と同じ値に設定されている。
【0048】上記円筒112,113は、同軸的に配設されている。また、上記円板114は、円筒112,113の一端部を塞ぐように、この一端部に取り付けられている。同様に、上記円板115は、円筒112,113の他端部を塞ぐように、この他端部に取り付けられている。これにより、液体の流動方向(図示矢印X5−X6方向)に垂直な方向の断面が四角形の環状容器11が形成される。言い換えれば、この垂直断面が四角形の液体流路111が形成される。
【0049】この液体流路111の幅(環状容器11の中心軸方向(図示矢印X1−X2方向)の寸法)は、円筒112,113の長さによって表される。また、この液体流路111の高さ(環状容器11の径方向(図示矢印X3−X4方向)の寸法)は、円筒112,113の半径の差によって表される。
【0050】図3は、環状容器11の内部を示す断面図である。図において、(a)は、環状容器11を、その中心軸に垂直な平面で切断した場合の断面図を示し、(b)は、中心軸を含む平面で切断した場合の断面図を示す。図において、W1は、上述した液体流路111の幅を示し、Hは、同じく高さを示す。
【0051】図示のごとく、梁12は、例えば、長方形の平板状に形成されている。そして、この長方形の平板状の梁12は、一端部にて環状容器11の内壁に支持されている。これにより、本実施の形態では、梁12として、片持梁が用いられている。
【0052】この場合、梁12は、例えば、径の大きな円筒112の内壁に垂直に支持されている。これにより、梁12は、液体の流動方向(図示矢印X5−X6方向)に垂直に支持されている。また、梁12は、側面ではなく、上面121や下面122が液体の流動方向(図示矢印X5−X6方向)を向くように取り付けられている。さらに、梁12は、液体流路111の幅方向(図示矢印X1−X2方向)の中央部に取り付けられている。
【0053】梁12の長さL(環状容器11の径方向(図示矢印X3−X4方向)の寸法)は、例えば、液体流路111の高さHの50%程度に設定されている。また、梁12の幅W2(環状容器11の中心軸方向(図示矢印X1−X2方向)の寸法)は、液体流路111の幅の20%程度に設定されている。これにより、液体の流動方向(図示矢印X5−X6方向)に垂直な方向における梁12の断面積(梁12の上面121や下面122(図3(a)参照)の面積と同じ)は、例えば、同方向における液体流路111の断面積の10%程度に設定されている。
【0054】また、梁12の長さLは、例えば、梁12の幅W2の2〜2.5倍程度に設定されている。さらに、梁12の厚さT(液体の流動方向(図示矢印X5−X6方向)の寸法)は、幅W2の1オーダくらい下に設定されている。
【0055】さらに、梁12は、例えば、アクリルやアルミニウムによって構成されている。
【0056】上記歪みゲージ13としては、例えば、電気抵抗線式の歪みゲージが用いられている。この歪みゲージ13は、梁12の上面121と下面122のいずれか一方に貼り付けられている。これは、歪みゲージ13の性質より、上面121と下面122のいずれか一方に貼り付けることにより、梁12の図示矢印X5方向の変位と図示矢印X6方向の変位のいずれも検出することができるからである。
【0057】また、この歪みゲージ13は、梁12の根元部に貼り付けられている。これは、電気抵抗線式の歪みゲージ13は、金属線が伸びるとその電気抵抗が増加するという性質を利用して、梁12の変位を検出するものであるからである。すなわち、このような構成では、歪みゲージ13を変位が最大となる先端部ではなく、モーメントが最大となる根元部に設ける必要があるからである。
【0058】ここで、図4を参照しながら、梁12の長さLを、液体流路111の高さHの50%程度に設定した理由を説明する。図4は、液体の速度勾配と質量分布を示す特性図である。なお、図4では、環状容器11については、その長さ方向(図示矢印X5−X6方向)の微小区間Δd(図3参照)を拡大して示す。この場合、Δdは、非常に微小であるため、図4では、環状容器11の壁を直線で近似している。
【0059】図において、横軸は、液体の流動速度Vを示し、縦軸は、液体流路111の外縁から環状容器11の径方向に向かう距離Dを示す。また、特性曲線C1は、液体の実際の速度勾配を示し、特性曲線C2は、この速度勾配の近似曲線を示す。さらに、長方形C3で囲まれる領域は、液体の質量が集中している領域を示す。
【0060】図示のごとく、特性曲線C1は、液体流路111の高さH方向の中央部で最大となるような2次関数で表される。これは、液体流路111を流動する液体が、環状容器11の内壁から摩擦力を受けるからである。すなわち、この摩擦力は、液体流路111の周辺部で大きく、中央部で小さくなる。これにより、液体は、液体流路111の周辺部より中央部で多く流れる。その結果、液体の流動速度が、液体流路111の中央部で大きくなる。
【0061】今、この特性曲線C1を、特性曲線C2で近似するものとする。すなわち、台形で近似するものとする。この台形の上底は、2次関数の頂点側に位置決めされている。この上底の長さは、0.5Hに設定されている。
【0062】液体の速度勾配をこのように仮定した場合、液体の質量は、D=0.25H〜0.75Hの領域に集中する。これにより、梁12が液体から圧力を受けるのは、この領域ということになる。また、液体の速度勾配を上記のように仮定した場合、液体の質量は、D=0.25H〜0.75Hの領域で一定となる。これにより、梁12は、この領域で、液体から一定の圧力を受ける。
【0063】以上から、梁12の長さLを0.25H〜0.75Hに設定することにより、本センサの動特性解析(周波数応答解析)から、理論的に梁12の挙動を解析することができる。この場合、最も信頼性のある解析を行うことができるのは、梁12の長さLが0.5Hのときである。そこで、本実施の形態では、梁12の長さLを、上記のごとく、液体流路111の高さHの50%程度に設定している。
【0064】[1−2]動作上記構成において、動作を説明する。
【0065】回転検出対象の角加速度を検出する場合、センサ本体10は、回転検出対象に取り付けられる。図5R>5にこの取付け方の一例を示す。図5には、センサ本体10を、例えば、ロボットアーム31に取り付ける場合を代表として示す。また、図5には、ロボットアーム31の長手方向(図示矢印X7−X8方向)の軸を回転軸とするこのアーム31の回転状態を検出する場合を代表として示す。この場合、センサ本体10は、例えば、環状容器11の中央の穴にロボットアーム31を挿入するようにして、このロボットアーム31に取り付けられる。
【0066】この状態で、回転検出対象(ロボットアーム31)が回転すると、環状容器11がその中心軸を回転軸として回転する。この回転により、環状容器11の液体流路111に封入されている液体がこの液体流路111に沿って流動する。この流動により、梁12が液体から圧力を受ける。これにより、梁12の先端部が変位する。この変位は、歪みゲージ13により検出される。この検出出力は、角加速度検出部20に供給される。これにより、回転検出対象の角加速度が検出される。
【0067】この検出は、例えば、テーブルを用いて行われる。このテーブルには、梁12の各変位Y(t)ごとに、回転検出対象の角加速度A(t)が記述されている。角加速度検出部14は、歪みゲージ13の検出出力に基づいて、テーブルを検索することにより、回転検出対象の角加速度A(t)を検出する。
【0068】上記テーブルは、環状容器11に回転変位X(t)を加えたときの梁12の変位Y(t)を検出することにより作成される。これは、環状容器11の回転変位X(t)から回転検出対象の角加速度A(t)を求めることができるからである。これを、図6を参照しながら説明する。図6は、環状容器11に加えられる回転変位X(t)と角度変位θ(t)とを示す図である。
【0069】今、環状容器11に加えられる回転変位X(t)が、次式(1)で表されるものとする。
X(t)=X0sinωt …(1)
但し、X0は、回転変位X(t)の最大値を示す。また、ωは、角速度を示す。
【0070】この場合、環状容器11の角度変位θ(t)は、次式(2)で表される。
θ(t)=(X0/R)sinωt …(2)
但し、Rは、環状容器11の半径を示す。
【0071】これにより、環状容器11の角速度θ’(t)は、次式(3)で表される。
θ’(t)=(X0/R)ωcosωt …(3)
【0072】その結果、環状容器11の角加速度θ”(t)は、次式(4)で表される。
θ”(t)=−(X0/R)ω2sinωt …(4)
【0073】図5のように、回転検出対象(ロボットアーム31)と環状容器11の回転軸が同じ場合、この角加速度θ”(t)が回転検出対象の角加速度A(t)となる。これに対し、2つの回転軸が異なる場合は、環状容器11の角加速度θ”(t)に対して、所定の変換処理を施すことにより、回転検出対象の角加速度A(t)が求められる。
【0074】このようにして求められた回転検出対象の角加速度A(t)と、そのときの梁12の変位Y(t)とをテーブルに記述することにより、両者の対応関係を示すテーブルが作成される。
【0075】図7は、テーブル作成システム構成の構成の一例を示す図である。図示のテーブル作成システムは、支持機構41と、ファンクションジェネレータ42と、増幅器43と、加振器44と、ウォームギア機構45と、レーザ変位計46と、高速フーリエ変換アナライザ47とを有する。
【0076】ここで、支持機構41は、環状容器11をその中心軸の周りに回転自在に支持する機能を有する。ジェネレータ42は、正弦波信号を出力する機能を有する。増幅器33は、この正弦波信号を増幅する機能を有する。加振器43は、増幅された正弦波信号を直線振動に変換する機能を有する。ウォームギア機構45は、この直線振動を環状容器11の回転振動に変換する機能を有する。レーザ変位計46は、上記直線振動による直線変位を検出する機能を有する。アナライザ47は、レーザ変位計46の検出出力と歪みゲージ13の検出出力とに基づいて、上記テーブルを作成する機能を有する。
【0077】上記構成においては、ジェネレータ42から出力される正弦波信号は、増幅器43で増幅された後、加振器44に供給される。これにより、電気的な正弦波信号が機械的な直線振動に変換される。この直線振動は、ウォームギヤ機構45により、環状容器11の回転振動に変換される。この変換により、環状容器11が回転振動させられる。この回転振動により、液体流路111に封入されている液体が流動する。この流動により、梁12の先端部が歪む。この歪みは、歪みゲージ13により検出される。この検出出力は、アナライザ47に供給される。
【0078】また、これと並行して、レーザ変位計46により、直線振動の変位が検出される。この検出出力は、アナライザ47に供給される。これにより、環状容器11の回転変位X0(t)(式(1)参照)が算出される。この算出は、ウォームギヤ機構45の変換係数を用いて行われる。この算出出力は、環状容器11の角加速度θ”(t)に変換される。この角加速度θ”(t)は、回転検出対象の角加速度A(t)に変換される。そして、角加速度A(t)と歪みゲージ13により検出された梁12の変位Y(t)とがテーブルに記述される。これにより、角加速度A(t)と変位Y(t)との関係を示すテーブルが作成される。
【0079】[1−3]効果以上詳述した本実施の形態によれば、次のような効果を得ることができる。
【0080】(1)まず、本実施の形態によれば、液体の流動によって変位させられる障害物として、弁ではなく、梁12が用いられる。これにより、障害物として、ある程度の剛性を持った障害物を用いることができる。その結果、環状容器11に大きな回転変位X(t)が加わった場合でも、障害物(梁11)の変位Y(t)が歪みゲージ13の計測範囲から外れることがない。これにより、このような場合でも、回転検出対象の角加速度A(t)を検出することができる。
【0081】これを、一実施例を使って説明する。なお、本実施例では、回転センサとして、1mmオーダの微小な回転センサを用いた。このような回転センサは、例えば、運動生理学の観点から、人間の姿勢を検出する場合に用いられる。この場合、回転センサとしては、小型のものが要求される。これは、人間が回転センサを身に付けた場合、この回転センサが人間にとって邪魔にならないようにするためである。
【0082】但し、実際の実験では、1mmオーダの微小な回転センサではなく、拡大モデルを使った。図8は、この拡大モデルのサイズを示す断面図である。この図8は、センサ本体10を図3と同じようにして示した断面図である。
【0083】図示の拡大モデルでは、外側の円筒112の直径は、150mmに設定され、内側の円筒113の直径は、100mmに設定されている。これにより、流体流路111の高さHは、25mmに設定されている。また、円筒112,113の長さは、30mmに設定されている。これにより、流体流路111の幅W1は、30mmに設定されている。さらに、梁12の長さLは、14mmに設定され、幅W2は、6mmに設定され、厚さTは、0.2mmに設定されている。この梁12としては、アクリル製の梁を用いた。
【0084】また、この拡大モデルでは、液体流路111に封入される液体として、1万cStのシリコンオイルを用いた。これは、回転センサとして、1mmオーダの微小なセンサを用いる場合、液体として粘性の低い水を用いたとしても、梁12に働く力は、慣性力より液体の粘性力によって支配されるからである。すなわち、液体として、水を用いたとしても、梁12は、水飴のような粘性の高い液体の中にあるような挙動を示すからである。
【0085】このような拡大モデルで、梁12の挙動を求める実験をした。この実験は、図7に示すようなシステムを用いて行った。この場合、梁12の挙動としては、梁12の変位Y(t)(出力)の周波数応答ではなく、これを環状容器11の回転変位X(t)で割ったもの、すなわち、Y(t)/X(t)(出力/入力)の周波数応答を求めた。この演算は、アナライザ37により行われる。
【0086】図9は、この実験結果を示す図である。図9において、横軸は、回転変位X(t)の周波数f(=ω/2π)を示し、縦軸は、出力/入力を示す。また、特性曲線C4は、計算により求められた周波数応答の理論値を示す。
【0087】この実験の結果、本実施例では、環状容器11の回転変位X(t)の周波数fが小さい場合、すなわち、この回転変位X(t)が大きい場合でも、梁12の変位Y(t)が歪みゲージ13の計測範囲に収まることが確かめられた。これにより、本実施例では、環状容器11の回転変位X(t)が大きい場合でも、回転検出対象の角加速度A(t)を検出することができる。
【0088】(2)また、本実施の形態によれば、液体の流動によって変位させられる障害物として、弁ではなく、梁12が用いられる。これにより、障害物として、液体の流動をほとんど妨げることがないような障害物を用いることができる。その結果、環状容器11に加わる回転変位X(t)が小さい場合でも、液体の流動が可能となる。これにより、このような場合でも、回転状態の検出出力の応答性が低下することを防止することができる。
【0089】(3)さらに、本実施の形態によれば、梁12の垂直断面の面積が液体流路111の垂直断面の面積の10%程度に設定されている。これにより、液体の通過面積として、液体流路111の垂直断面の面積の90%程度を確保することができる。その結果、梁12によって液体の流動が妨げられることがないようにすることができる。
【0090】(4)さらにまた、本実施の形態によれば、梁12が液体流路111の幅W1方向の中央部に設けられている。また、梁12の長さLが液体流路111の高さHの50%程度に設定されている。これらにより、本実施の形態では、梁12の先端部を液体流路111の中央部に設けることができる。その結果、梁12の先端部を液体の質量が集中している領域に位置決めすることができる。これにより、梁12を、環状容器11に加えられた回転変位X(t)に応じた圧力で変位させることができる。その結果、回転検出対象の回転状態を正確に検出することができる。
【0091】(5)また、本実施の形態によれば、梁12が液体の流動方向に垂直に支持されている。これにより、梁12に液体の圧力を垂直にかけることができる。その結果、梁12に液圧を効率的にかけることができる。これにより、梁12を小さくすることができる。その結果、梁12によって液体の流動を妨げない効果を高めることができる。
【0092】(6)さらに、本実施の形態によれば、梁12が長方形の平板状に形成されている。これにより、液圧を平面で受けることができる。その結果、梁12に液圧を効率的にかけることができる。これにより、梁12を小さくすることができる。その結果、梁12によって液体の流動を妨げない効果を高めることができる。
【0093】(7)さらにまた、本実施の形態によれば、梁12の長さLが幅W2の2〜2.5倍程度に設定されている。また、本実施の形態によれば、梁12の厚さTが幅W2の1オーダくらい下に設定されている。これらにより、変位Y(t)が歪みゲージ13の計測範囲を超えることがないような剛性を有する梁12を構成することができる。
【0094】(8)また、本実施の形態によれば、梁12として、片持梁が用いられる。これにより、長方形の平板の一端部を支持するだけで、目的の障害物を構成することができる。その結果、この障害物を簡単に構成することができる。また、梁12の材料として、固定梁を用いる場合より、弾性の高い材料を用いることができる。これにより、この場合より、変位が計測範囲を超えないようにするための寸法等の設定が容易となる。さらに、単純梁を用いる場合に比べ、確実に歪みゲージ13の出力を得ることができる。
【0095】(9)さらに、本実施の形態によれば、変位検出手段として、歪みゲージ13が用いられる。これにより、変位検出手段を梁12に貼り付けるだけで、梁12の変位Y(t)を検出することができる。その結果、環状容器11の回転状態に影響されることなく、梁12の変位Y(t)を検出することができる。これにより、梁12の変位Y(t)を安定に検出することができる。また、このような構成によれば、梁12の変位Y(t)とこの変位Y(t)の検出出力との関係をリニアな特性曲線で表すことができる。これにより、梁12の変位Y(t)を正確に検出することができる。
【0096】(10)さらにまた、本実施の形態によれば、回転検出対象の回転状態として、角加速度A(t)が検出される。このような構成では、回転状態の検出出力を2度積分することにより、回転検出対象の角度変位を検出することができる。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0097】[1−4]その他の実施の形態以上、本発明の一実施の形態を詳細に説明した。しかしながら、本発明は、先の実施の形態に限定されるものではない。
【0098】(1)例えば、先の実施の形態では、梁12を外側の円筒112の内壁に固定する場合を説明した。しかしながら、本発明は、例えば、内側の円筒113の外壁、または、円板114,115の内壁に固定するようにしてもよい。
【0099】(2)また、先の実施の形態では、梁12として、長方形の平板を用いる場合を説明した。しかしながら、本発明は、例えば、円柱状の梁を用いるようにしてもよい。
【0100】(3)さらに、先の実施の形態では、梁12として、片持梁を用いる場合を説明した。しかしながら、本発明は、単純梁(両端支点梁)、固定梁、連続梁等を用いるようにしてもよい。
【0101】(4)さらにまた、先の実施の形態では、梁12を1つ設ける場合を説明した。しかしながら、本発明では、これを複数設けるようにしてもよい。この場合、梁12を、環状容器11の回転軸を中心とする点対称位置に2つ設けるようにすれば、環状容器11の並進運動の影響を除去することができる。
【0102】(5)また、先の実施の形態では、液体流路として、終端のない液体流路111を用いる場合を説明した。しかしながら、本発明は、液体の流動に影響を与えなければ、終端のある液体流路11を用いるようにしてもよい。
【0103】(6)さらに、先の実施の形態では、液体流路として、円環状の液体流路111を用いる場合を説明した。しかしながら、本発明は、液体の流動に影響を与えない環状の液体流路でれば、円環状以外の液体流路を用いるようにしてもよい。例えば、多角形状や楕円状の液体流路を用いるようにしてもよい。
【0104】(7)さらにまた、先の実施の形態では、液体流路形成手段として、環状容器11を用いる場合を説明した。しかしながら、本発明は、環状の液体流路を形成することができるものであれば、環状容器11以外の容器または容器以外の物を用いるようにしてもよい。例えば、環状の液体流路を有する平板状の容器を用いるようにしてもよい。
【0105】(8)また、先の実施の形態では、液体流路として、垂直断面が四角形の液体流路111を用いる場合を説明した。しかしながら、本発明は、四角形以外の形状の液体流路を用いるようにしてもよい。例えば、多角形または円形の液体流路を用いるようにしてもよい。
【0106】(9)さらに、先の実施の形態では、回転検出対象の回転状態として、角加速度A(t)を検出する場合を説明した。しかしながら、本発明は、回転変位、角度変位、回転速度、角速度、回転加速度等を検出するようにしてもよい。
【0107】(10)さらにまた、先の実施の形態では、センサ本体10を1つの軸にのみ設ける場合を説明した。言い換えれば、回転センサとして、1軸角加速度センサを構成する場合を説明した。しかしながら、本発明は、センサ本体10を互いに直交する複数の軸の各軸ごとに設けるようにしてもよい。言い換えれば、複数軸角加速度センサを構成するようにしてもよい。この場合、互いに直交する3つの軸の各軸ごとにセンサ本体10を設けるようにすれば、回転センサに加えられる並進運動の影響を除去することができる。
【0108】すなわち、このような構成によれば、回転センサに並進加速度が加えられた場合、3つのセンサ本体10のうち、2つのセンサ本体10の歪みゲージ13から検出出力が得られる。これに対し、回転加速度が加えられた場合は、1つのセンサ本体10の歪みゲージ13からしか検出出力が得られない。これにより、回転センサに加えられる加速度が並進加速度か角加速度かを識別することができる。その結果、回転センサに加えられる並進運動の影響を除去することができる。
【0109】これを具体的に説明する。今、3つの直交する軸をx、y、zとし、このうち、例えば、x軸方向に並進加速度が加えられたとする。この場合、y軸用とz軸用のセンサ本体10の梁12が液体の流動により変位させられる。これは、この場合は、これら2つのセンサ本体10の梁12の向きが液体の流動方向に垂直になるからである。これに対し、x軸周りの角加速度が加えられると、x軸用のセンサ本体10の梁12が液体の流動により変位させられる。これは、この場合は、このセンサ本体10の梁12の向きが液体の流動方向に垂直になるからである。
【0110】以上により、3つのセンサ本体10の歪みゲージ13の検出出力を観察することにより、加えられた加速度がx軸方向の並進加速度かx軸周りの角加速度かを識別することができる。これにより、x軸方向の並進運動の影響を除去することができる。なお、これは、詳細な説明は省略するが、y軸方向やz軸方向の並進運動についても同様である。
【0111】(11)このほかにも本発明はその要旨を逸脱しない範囲で種々様々変形実施可能なことは勿論である。
【0112】
【発明の効果】以上詳述したように請求項1記載の回転センサによれば、液体の流動によって変位させられる障害物として梁が用いられる。これにより、加えられる回転変位の大きさに係わらず、回転検出対象の回転状態を確実に検出することができる。
【0113】また、請求項2記載の回転センサによれば、請求項1記載のセンサにおいて、さらに、回転状態検出手段が設けられる。これにより、回転センサの最終出力を得ることができる。
【0114】さらに、請求項3記載の回転センサによれば、請求項1または2記載のセンサにおいて、液体の流動方向に垂直な方向における梁の断面積が、同方向における液体流路の断面積の10%程度に設定されている。これにより、梁によって液体の流動がほとんど妨げられることがないようにすることができる。
【0115】さらにまた、請求項4記載の回転センサによれば、請求項1,2または3記載のセンサにおいて、梁が液体流路の中央部に位置決めされている。これにより、回転検出対象の回転状態を正確に検出することができる。
【0116】また、請求項5記載の回転センサによれば、請求項1,2,3,4または5記載のセンサにおいて、梁が液体の流動方向に垂直に支持されている。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0117】さらに、請求項6記載の回転センサによれば、請求項1,2,3,4または5記載のセンサにおいて、梁が長方形の平板状に形成されている。これにより、梁によって液体の流動を妨げない効果を高めることができる。
【0118】さらにまた、請求項7記載の回転センサによれば、請求項1,2,3,4,5または6記載のセンサにおいて、梁として、片持梁が用いられる。これにより、障害物を簡単に構成することができる。
【0119】また、請求項8記載の回転センサによれば、請求項1,2,3,4,5,6または7記載のセンサにおいて、変位検出手段として、歪みゲージが用いられる。これにより、梁の変位を安定にかつ正確に検出することができる。
【0120】さらに、請求項9記載の回転センサによれば、請求項2記載のセンサにおいて、回転検出対象の回転状態として、角加速度が検出される。これにより、姿勢センサとして有用な回転センサを提供することができる。
【0121】さらにまた、請求項10記載の回転センサによれば、請求項1,2,3,4,5,6,7,8または9記載のセンサにおいて、液体流路形成手段と、梁と、変位検出手段とが互いに直交する3つの軸の各軸ごとに設けられる。これにより、梁が各液体流路形成手段ごとに1しか設けられない場合であっても、並進運動の影響を除去することができる。
【図面の簡単な説明】
【図1】本発明の一実施の形態の構成を示す図である。
【図2】本発明の一実施の形態における環状容器の構成を示す分解斜視図である。
【図3】本発明の一実施の形態におけるセンサ本体の構成を示す断面図である。
【図4】本発明の一実施の形態における液体の流動速度と質量分布を示す図である。
【図5】本発明の一実施の形態のセンサ本体の取付け方の一例を示す斜視図である。
【図6】本発明の一実施の形態において環状容器に加えられる回転変位と角度変位を示す図である。
【図7】本発明の一実施の形態において角加速度の検出に使用されるテーブルの作成システムの構成を示す図である。
【図8】本発明の一実施例における各部の寸法を示す断面図である。
【図9】本発明の一実施例における出力/入力の周波数応答特性を示す特性図である。
【符号の説明】
10…センサ本体、20…角加速度検出部、11…環状容器、111…液体流路、112,113…円筒、114,115…円板、12…梁、13…歪みゲージ、20…角速度検出部、31…支持機構、32…ファンクションジェネレータ、33…増幅器、34…加振器、35…ウォームギヤ機構、36…レーザ変位計、37…高速フーリエ変換アナライザ。
【特許請求の範囲】
【請求項1】 環状の液体流路を形成するものであって、回転検出対象に取り付けられる液体流路形成手段と、前記液体流路に設けられ、この液体流路の中心軸を回転軸とする前記液体流路形成手段の回転に伴う前記液体の流動によって変位させられる少なくとも1つの梁と、この梁の変位を検出する変位検出手段とを備えたことを特徴とする回転センサ。
【請求項2】 前記変位検出手段の検出出力に基づいて、前記回転検出対象の回転状態を検出する回転状態検出手段をさらに備えたことを特徴とする請求項1記載の回転センサ。
【請求項3】 前記液体の流動方向に垂直な方向における前記梁の断面積が、同方向における前記液体流路の断面積の10%程度に設定されていることを特徴とする請求項1または2記載の回転センサ。
【請求項4】 前記梁が前記液体流路の中央部に位置決めされていることを特徴とする請求項1,2または3記載の回転センサ。
【請求項5】 前記梁が前記液体の流動方向に垂直となるように支持されていることを特徴とする請求項1,2,3または4記載の回転センサ。
【請求項6】 前記梁が長方形の平板状に形成されていることを特徴とする請求項1,2,3,4または5記載の回転センサ。
【請求項7】 前記梁が片持梁であることを特徴とする請求項1,2,3,4,5または6記載の回転センサ。
【請求項8】 前記変位検出手段が歪みゲージであることを特徴とする請求項1,2,3,4,5,6または7記載の回転センサ。
【請求項9】 前記回転状態検出手段が前記回転検出対象の角加速度を検出するように構成されていることを特徴とする請求項2記載の回転センサ。
【請求項10】 前記液体流路形成手段と、前記梁と、前記変位検出手段とが、互いに直交する3つの軸の各軸ごとに設けられていることを特徴とする請求項1,2,3,4,5,6,7,8または9記載の回転センサ。
【請求項1】 環状の液体流路を形成するものであって、回転検出対象に取り付けられる液体流路形成手段と、前記液体流路に設けられ、この液体流路の中心軸を回転軸とする前記液体流路形成手段の回転に伴う前記液体の流動によって変位させられる少なくとも1つの梁と、この梁の変位を検出する変位検出手段とを備えたことを特徴とする回転センサ。
【請求項2】 前記変位検出手段の検出出力に基づいて、前記回転検出対象の回転状態を検出する回転状態検出手段をさらに備えたことを特徴とする請求項1記載の回転センサ。
【請求項3】 前記液体の流動方向に垂直な方向における前記梁の断面積が、同方向における前記液体流路の断面積の10%程度に設定されていることを特徴とする請求項1または2記載の回転センサ。
【請求項4】 前記梁が前記液体流路の中央部に位置決めされていることを特徴とする請求項1,2または3記載の回転センサ。
【請求項5】 前記梁が前記液体の流動方向に垂直となるように支持されていることを特徴とする請求項1,2,3または4記載の回転センサ。
【請求項6】 前記梁が長方形の平板状に形成されていることを特徴とする請求項1,2,3,4または5記載の回転センサ。
【請求項7】 前記梁が片持梁であることを特徴とする請求項1,2,3,4,5または6記載の回転センサ。
【請求項8】 前記変位検出手段が歪みゲージであることを特徴とする請求項1,2,3,4,5,6または7記載の回転センサ。
【請求項9】 前記回転状態検出手段が前記回転検出対象の角加速度を検出するように構成されていることを特徴とする請求項2記載の回転センサ。
【請求項10】 前記液体流路形成手段と、前記梁と、前記変位検出手段とが、互いに直交する3つの軸の各軸ごとに設けられていることを特徴とする請求項1,2,3,4,5,6,7,8または9記載の回転センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2000−97679(P2000−97679A)
【公開日】平成12年4月7日(2000.4.7)
【国際特許分類】
【出願番号】特願平10−264506
【出願日】平成10年9月18日(1998.9.18)
【出願人】(000113263)ホーヤ株式会社 (3,820)
【Fターム(参考)】
【公開日】平成12年4月7日(2000.4.7)
【国際特許分類】
【出願日】平成10年9月18日(1998.9.18)
【出願人】(000113263)ホーヤ株式会社 (3,820)
【Fターム(参考)】
[ Back to top ]