
回転デバイス用センサ組立体および製作方法
【課題】高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサおよび製作方法を提供する。
【解決手段】センサ組立体40は、ハウジング内の空洞を画定する内面を含んでいるハウジングと、空洞の中に配置された近接センサ42とを含む。近接センサ42は、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
【解決手段】センサ組立体40は、ハウジング内の空洞を画定する内面を含んでいるハウジングと、空洞の中に配置された近接センサ42とを含む。近接センサ42は、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書に開示される内容は、一般に監視システムに関し、より具体的には、デバイスの動作を監視するのに使用されるセンサ組立体に関する。
【背景技術】
【0002】
少なくともいくつかの既知のタービンエンジンシステムは、圧縮機、圧縮機から下流に結合された燃焼器、タービン、および圧縮機とタービンの間に回転可能に結合された回転子組立体を含む。既知のタービンエンジンシステムは、動作中に振動または他の挙動を示す可能性がある。少なくともいくつかの既知のタービンエンジンシステムには、このような挙動を測定して、例えば、タービンエンジンシステムの、回転子組立体で示される振動の量、回転子組立体の回転速度、および/またはその他の適切な動作特性を求める1つまたは複数のセンサを含んでいる監視システムが含まれる。少なくともいくつかの既知の監視システムは、回転子組立体など回転機械の構成要素の異常および/または欠陥を検出するのに、渦電流(EC)センサを使用する。他の既知のEC検査デバイスは、亀裂、ノック音、くぼみ、材料の隆起および/または構成要素の表面上の他の表面欠陥を検出するために、かつ/または構成要素の導電率および/または密度を含む構成要素の材料特性を評価するために使用される。
【0003】
既知のタービンエンジンシステムは、一般に比較的高温で動作する。少なくともいくつかの既知のエンジン構成要素は、既知のECセンサの損傷、信号の劣化、信号強度の低下、および/または信号の信頼性の低下をもたらす可能性がある高温で動作する。そのため、比較的高温で動作するエンジン構成要素の監視にECセンサを使用するのは、制限されるかまたは不可能なことがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7260991号明細書
【発明の概要】
【0005】
本発明の目的は、高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサおよび製作方法を提供することである。
【0006】
一態様では、センサ組立体が提供される。このセンサ組立体は、ハウジング内の空洞を画定する内面を含んでいるハウジング、および空洞の中に配置された近接センサを含む。この近接センサは、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
【0007】
別の態様では、デバイスの動作を監視するためのシステムが提供される。このシステムは、デバイスの状態を監視するためのコンピュータデバイスおよびコンピュータデバイスに結合されたセンサ組立体を含む。このセンサ組立体は、デバイスの構成要素の位置を検知して、検知された位置を示す信号を生成するように構成される。このセンサ組立体は、ハウジング内の空洞を画定する内面を備えるハウジング、および空洞の中に配置された近接センサを含む。この近接センサは、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する実質的な渦巻き形を有する。
【0008】
さらに別の態様では、デバイスの構成要素を監視するのに使用されるセンサ組立体を製作する方法が提供される。この方法は、検知コイルの基板材料の外面にわたってフォトレジスト材料を堆積するステップを含む。第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む近接センサと実質的に類似の形状を有するフォトレジストパターンが、検知コイルの基板材料上に現像される。このセンサ基板材料がエッチングされて、近接センサを形成する。
【図面の簡単な説明】
【0009】
【図1】例示的デバイスの概略図である。
【図2】図1に示されたデバイスとともに使用され得る例示的センサ組立体の断面図である。
【図3】図2に示されたセンサ組立体の、ライン3−3に沿って得られた部分的断面図である。
【図4】図2に示されたセンサ組立体の、ライン4−4に沿って得られた別の部分的断面図である。
【図5】図2に示されたセンサ組立体を製作するのに用いられ得る例示的方法の流れ図である。
【発明を実施するための形態】
【0010】
本明細書で説明される例示的方法およびシステムは、高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサを提供することにより、既知の監視システムの少なくともいくつかの不利益を克服する。そのうえ、本明細書で説明される近接センサは、例えばチタン材料などの耐熱材料または超合金材料を含む基板材料を含んでいる平面状で実質的に渦巻き形の検知コイルを含む。また、平面状の検知コイルを含んでいる近接センサを提供することにより、フォトエッチングまたはレーザー切断を用いて検知コイルを製作することができる。高温構成要素および低温構成要素を監視する近接センサを設けることにより、本明細書で説明される監視システムは、監視され得るエンジン構成要素数の増加を促進する。また、フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、検知コイルの寸法形状を最適化して、最小限の電気抵抗ならびに小さな巻き線間静電容量を維持するようにコイルの電気的特性を改善することができる。そのため、検知コイルの線形範囲および近接性能が改善される。
【0011】
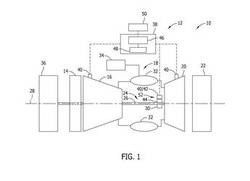
図1は例示的デバイス10の概略図である。図2は、デバイス10とともに使用することができる例示的監視システム12のブロック図である。この例示的実施形態では、デバイス10は、一般に比較的高い動作温度で動作するタービンエンジンである。しかし、本明細書で説明される本発明が、あらゆる適切なデバイスで同様に実施され得て、タービンエンジンでの実施だけに限定されないとことが、本明細書の教示によって導かれた当業者には明らかであろう。例えば、デバイス10は、例えば比較的低温で動作する低温システムなどの冷房装置でよい。したがって、本明細書で説明され、かつ図示されるタービンエンジン10は、説明のためだけのものであり、あらゆる態様において、本明細書で説明される装置および/または方法を限定するようには意図されていない。一実施形態では、タービンエンジン10は、ニューヨーク州スケネクタディのゼネラルエレクトリック社によって提供される9FAタービンまたは類似のデバイスでよい。
【0012】
この例示的実施形態では、タービンエンジン10は、吸気区間14、吸気区間14から下流に結合された圧縮機区間16、圧縮機区間16から下流に結合され燃焼器区間18、燃焼器区間18から下流に結合されたタービン区間20、および排気区間22を含む。回転子組立体24は、タービン区間20および圧縮機区間16に結合され、タービン区間20と圧縮機区間16の間に中心線軸28に沿って延在する駆動軸26を含む。また、回転子組立体24は、駆動軸26を支持するために、少なくとも1つの軸受け30などの少なくとも1つの支持要素も含む。燃焼器区間18は、複数の燃焼器32を含む。燃焼器区間18は、燃焼器32が各圧縮機区間16と流れ連絡するように圧縮機区間16に結合される。
【0013】
燃料集合体34が各燃焼器32に結合され、燃焼器32に燃料の流れを供給する。タービン区間20は、タービンエンジン10の動作中は電気エネルギーを供給するために、圧縮機区間16および発電機36に対して駆動軸26で回転可能に結合される。発電機36は、例えば電力系統に電力を分配するための電気公益事業の送電網(図示せず)などの電源に結合される。
【0014】
この例示的実施形態では、監視システム12は、複数のセンサ組立体40に結合されるコンピュータデバイス38を含む。各センサ組立体40は、タービンエンジン10の動作および環境条件に関する様々な動作パラメータを検出する。センサ組立体40は、振動センサ、位置センサ、温度センサ、加速度センサ、液圧センサ、電力負荷センサ、および/またはタービンエンジン10の動作に関する様々なパラメータを検知する他のセンサを含み得るが、これら以外のものを含まないように限定されることはない。本明細書で用いられる用語「パラメータ」は、構成要素の相対位置、振動、温度、液圧、電力負荷、回転速度、および定義された位置における流体の流れなど、その値がタービンエンジン10の動作条件および環境条件を定義するのに用いられ得る物理的性質を指す。
【0015】
この例示的実施形態では、監視システム12は、少なくとも1つのセンサ組立体40を近接センサ42の形で含む。例えば圧縮機区間16、タービン区間20、駆動軸26ならびに/あるいは構成要素44が回転するときの同構成要素の振動および/または相対位置を検知するためのベアリング30などといったタービンエンジン10の構成要素44に隣接して、近接センサ42が配置される。近接センサ42は、コンピュータデバイス38に結合され、近接センサ42に対する構成要素44の位置を検知して、検知された位置をコンピュータデバイス38に伝送するように構成される。
【0016】
コンピュータデバイス38は、プロセッサ46およびメモリデバイス48を含む。プロセッサ46は、近接センサ42と通信結合され、1つまたは複数のシステムおよびマイクロコントローラ、マイクロプロセッサ、縮小命令セットコンピュータ(RISC)、特定用途向け集積回路(ASIC)、プログラマブルロジック回路(PLC)、フィールドプログラマブルゲートアレイ(FPGA)、および本明細書で説明される機能を実行することができる他の回路を含み得る任意の適切なプログラマブル回路を含む。本明細書で説明される方法は、限定することなく記憶デバイスおよび/またはメモリデバイスを含む非一時的コンピュータ読取り可能媒体で実施される、実行可能な命令として符号化することができる。このような命令がプロセッサによって実行されると、プロセッサは、本明細書で説明される方法の少なくとも一部分を実行する。上記の実例は単なる例示であり、したがって、用語「プロセッサ」の定義および/または意味を限定するようには少しも意図されていない。この例示的実施形態では、メモリデバイス48は、実行可能な命令および/または他のデータなどの情報を、選択的に記憶し、かつ引き出すことができる1つまたは複数のデバイスである。メモリデバイス48は、限定することなく、ダイナミックランダムアクセスメモリ(DRAM)、スタティックランダムアクセスメモリ(SRAM)、固体ディスク、および/またはハードディスクなどの1つまたは複数のコンピュータ読取り可能媒体を含むことができる。メモリデバイス48は、限定することなく、本明細書で説明される方法とともに用いるのに適切な実行可能命令および/またはその他のタイプのデータを記憶するように構成することができる。
【0017】
コンピュータデバイス38は、ユーザに対する図的表現および/または通知を表示するためのディスプレイ50も含む。ディスプレイ50は、プロセッサ46に結合され、真空蛍光ランプディスプレイ(VFD)および/または1つもしくは複数の発光ダイオード(LED)を含むことができる。それに加えて、またはその代わりに、ディスプレイ50は、限定することなく、液晶ディスプレイ(LCD)、ブラウン管(CRT)、プラズマディスプレイ、ならびに/あるいはユーザに対して画像データおよび/またはテキストを表示することができる任意の適切な視覚的出力デバイスを含むことができる。この例示的実施形態では、構成要素44の振動、構成要素44の位置、および/またはその他の情報が、ユーザに対してディスプレイ50に表示され得る。また、構成要素44の振動および/または位置の図的表現が、ユーザに対してディスプレイ50に表示され得る。
【0018】
動作中、吸気区間14が、空気を圧縮機区間16の方へ導く。圧縮機区間16は、流入空気を、より高い圧力および温度へと圧縮し、圧縮空気を燃焼器区間18の方へ放出する。燃料が、燃料集合体34から各燃焼器32へと導かれ、そこで圧縮空気と混合されて、燃焼器区間18で点火される。燃焼器区間18が、燃焼ガスをタービン区間20へと導き、そこでガス流れの熱エネルギーが機械的回転エネルギーに変換されて、圧縮機区間16および/または発電機36を駆動する。排気ガスは、タービン区間20を出て、排気区間22を通って周囲の大気または熱回復システムなどの利用位置へと流れる。この例示的実施形態では、近接センサ42が、構成要素44の位置および/または振動を示す信号を生成するために渦電流を生成する。より具体的には、近接センサ42は、駆動軸26と近接センサ42の間の間隙または空間などの、回転機械の諸構成要素44の間の間隙52または空間を示す信号を生成するために渦電流を生成する。近接センサ42は、信号を、連続的に、周期的に、もしくは1回だけ、および/またはコンピュータデバイス38による構成要素44の状態監視を可能にするその他の信号タイミングで、伝送することができる。そのうえ、近接センサ42は、アナログ形式またはデジタル形式のいずれかで信号を伝送することができる。コンピュータデバイス38は、近接センサ42から生成された信号を受け取り、受け取った信号に少なくとも部分的に基づいて、構成要素44の振動および/または位置を計算する。また、コンピュータデバイス38は、構成要素44の計算された位置および/または計算された振動の図的表現をディスプレイ50上に表示する。そのうえ、構成要素44の状態が所定の閾値を超えた場合、コンピュータデバイス38は、可聴警報信号または視覚警報信号を生成してよい。
【0019】
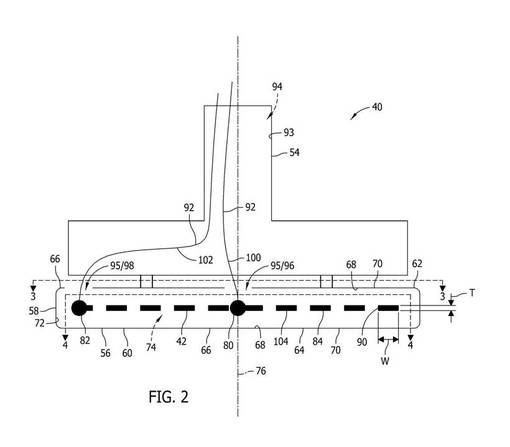
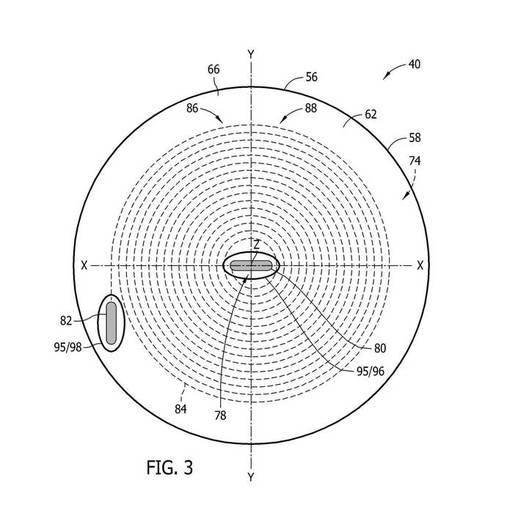
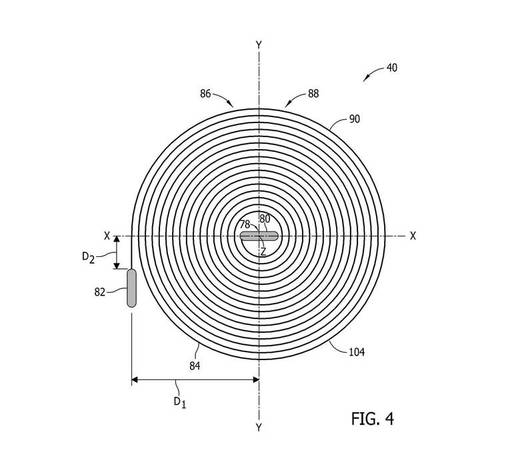
図2は、例示的センサ組立体40の断面図である。図3は、ほぼライン3−3に沿って得られたセンサ組立体40の部分的断面図である。図4は、ほぼライン4−4に沿って得られたセンサ組立体40の部分的断面図である。この例示的実施形態では、センサ組立体40は、プローブケーシング54、ケーシング54に結合されたセンサハウジング56、およびセンサハウジング56の中に配置された近接センサ42を含む。センサハウジング56は、前部の端壁60と反対側の後部の端壁62の間に延在する側壁58を含む。後部の端壁62は、プローブケーシング54に前部の端壁60より接近しており、センサハウジング56がプローブケーシング54から支持されるように配置されている。
【0020】
この例示的実施形態では、センサハウジング56は、実質的に円板の形状を有する外面64も含む。前部の端壁60および後部の端壁62は、それぞれが、内面68と外面70の間に延在する円盤状の本体66を含む。側壁58は、半径方向に内面72を含み、内面72は、実質的に円筒状であって、空洞74を画定する。空洞74は、前部の端壁60と後部の端壁62の間に延在する。内面72は、端壁60と端壁62の間の中心線軸76に沿って軸方向に延在する。空洞74は、近接センサ42を受け取るようにサイズ設定して成形される。代替実施形態では、ハウジング56は、三角形、正方形、長方形、多角形、またはセンサ組立体40が本明細書で説明されるように機能することを可能にする任意の適切な形状でよい。
【0021】
図3および図4を参照すると、この例示的実施形態では、3つの直交する軸X、Y、およびZが近接センサ42を通って延在し、近接センサ42に対して3次元デカルト座標系を定義する。より具体的には、この例示的実施形態では、Z軸は、近接センサ42の中心点78と実質的に共軸であり、X軸とY軸が交差してXY基準面を形成する。この例示的実施形態では、近接センサ42は、第1のコネクタ80、第2のコネクタ82、および第1のコネクタ80と第2のコネクタ82の間に延在する検知コイル84を含む。
【0022】
検知コイル84は、実質的に平面状であり、XY基準面に実質的に含まれている実質的な渦巻き形86を有する。検知コイル84は、第2のコネクタ82が第1のコネクタ80から半径方向の外側に配置されるように、第1のコネクタ80から外側に延在する複数の巻き88を含む。代替実施形態では、検知コイル84は、三角形、正方形、長方形、多角形、または近接センサが本明細書で説明されるように機能することを可能にする任意の適切な形状を含むことができる。
【0023】
この例示的実施形態では、第1のコネクタ80が中心点78に対して配向され、検知コイル84が第1のコネクタ80から外側に延在し、第2のコネクタ82は、X軸に沿って第1のコネクタ80から第1の距離D1に配置され、Y軸に沿って第1のコネクタ80から第2の距離D2に配置される。この例示的実施形態では、第2のコネクタ82がY軸に対して実質的に平行に配向され、第1のコネクタ80がX軸に対して実質的に平行に配向されて、第2のコネクタ82は、XY基準面内で第1のコネクタ80に対して実質的に垂直に配向される。代替実施形態では、第2のコネクタ82が第1のコネクタ80に対して斜めに配向されてよく、あるいは、第2のコネクタ82が第1のコネクタ80に対して実質的に平行に配向されてよい。一実施形態では、検知コイル84は、第1のコネクタ80が中心線軸76に対して配向されるように、ハウジングの空洞74の中に配置される。あるいは、検知コイル84は、第1のコネクタ80が、中心線軸76から、ある距離だけオフセットされるように、ハウジング56の中に配置されてもよい。
【0024】
検知コイル84は、実質的に平坦な棒90を含み、棒90は、長方形の断面形状を有し、X−Y基準面に沿って測定された半径方向の幅W(図2に示されている)およびZ軸に沿って測定された厚さTを含む。代替実施形態では、検知コイル84は、センサ組立体40が本明細書で説明されるように機能することを可能にする任意の適切な断面形状を有することができる。この例示的実施形態では、半径方向の幅Wが厚さTより大きい。あるいは、半径方向の幅Wが厚さT以下でもよい。
【0025】
この例示的実施形態では、センサ組立体40には、検知コイル84とコンピュータデバイス38の間に延在して、検知コイル84をコンピュータデバイス38(図1に示されている)に対して電気的に結合する1つまたは複数の接続ケーブル92が含まれる。各接続ケーブル92が、1つまたは複数の電線(図示せず)を含むことができる。プローブケーシング54は、コンピュータデバイス38からプローブケーシング54を通って検知コイル84まで延在する接続ケーブル92を受け取るようにサイズ設定されている空洞94を画定する内面93を含む。ハウジング56は、そこに画定された1つまたは複数の開口95を含み、開口95のそれぞれが、コンピュータデバイス38に対する検知コイル84の電気的結合を容易にするために、そこを通る1つまたは複数の接続ケーブル92を受け取るようにサイズ設定して成形される。この例示的実施形態では、後部の端壁62は、第1のコネクタ80に対して配向された第1の開口96、および第2の開口98に対して配向された第2の開口98を含む。第1の接続ケーブル100は、第1の開口96を通って延在して第1のコネクタ80に結合される。第2の接続ケーブル102は、第2の開口98を通って延在して第2のコネクタ82に結合される。
【0026】
この例示的実施形態では、センサ組立体40は、約−200℃から約1000℃の範囲内の動作温度の環境で稼働することができる。この例示的実施形態では、ハウジング56およびプローブケーシング54のそれぞれが、少なくとも部分的にセラミック材料から製作される。一実施形態では、ハウジング56およびプローブケーシング54のそれぞれが、アルミナ(例えば92%のアルミナ)、窒化アルミニウム、ホウ珪酸ガラス、水晶、サイアロン、低温で同時焼成されたセラミック、窒化シリコン、アルミナ、炭化シリコン、サファイア、ジルコニア、またはその他の適切な工業用セラミック材料のうち少なくとも1つを含む材料から製作される。この例示的実施形態では、検知コイル84は、チタン材料を含んでいる基板材料104を含む。代替実施形態では、基板材料104は、例えばInconel(登録商標)またはIncoloy(登録商標)などの超合金を含む。あるいは、基板材料104は、ステンレス鋼または例えばニッケルコバルトなどのニッケル合金を含む。この例示的実施形態では、検知コイル84は、実質的に平坦な板から、フォトエッチングまたはレーザー切断を用いて製作される。
【0027】
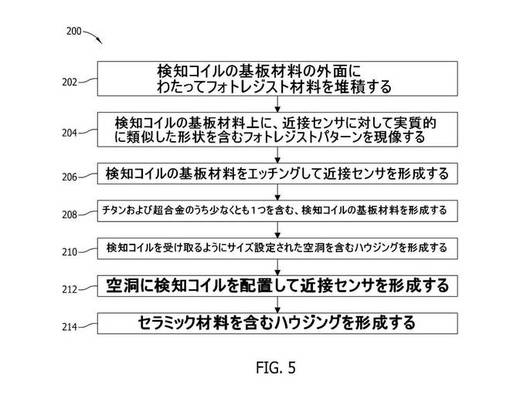
図5は、センサ組立体40を製作するのに実行され得る例示的方法200の流れ図である。この例示的実施形態では、方法200は、検知コイルの基板材料104の外面にわたってフォトレジスト材料を堆積するステップ202を含む。204で、検知コイルの基板材料104にわたって現像されたフォトレジストパターンは、第1のコネクタ80、第2のコネクタ82、および検知コイル84を含んでいる近接センサ42に対して実質的に類似した形状を有し、検知コイル84は、一般に渦巻き形に成形される。検知コイルの基板材料104は、次いで、206でエッチングされて近接センサ42を形成する。この例示的実施形態では、方法200は、チタン材料および超合金材料のうち少なくとも1つを含んでいる材料から検知コイルの基板材料104を形成するステップ208を含む。また、方法200は、空洞74を含むハウジング56を形成するステップ210、および空洞74に検知コイル84を挿入して近接センサ42を形成するステップ212も含む。そのうえ、方法200は、少なくとも1つのセラミック材料からハウジング56を形成するステップ214を含むことができる。一実施形態では、方法200は、アルミナ(例えば92%のアルミナ)、窒化アルミニウム、ホウ珪酸ガラス、水晶、サイアロン、低温で同時焼成されたセラミック、窒化シリコン、アルミナ、炭化シリコン、サファイア、およびジルコニアのうち少なくとも1つを含んでいる材料からハウジング56およびプローブケーシング54を形成するステップ214を含む。
【0028】
一実施形態では、基板材料104の第1の面および反対側の第2の面にわたってフォトレジスト材料が堆積される。次いで、検知コイル84の画像が、例えばマイラーシートなどの複数の膜シート上にプリントされる。プリントされた各シートは、基板材料104の各面に取り付けられ、基板材料104の各面が検知コイル84の実質的に同一の画像を含むように配向される。プリントされたシートは、検知コイル84の形状に対応する部分のフォトレジスト材料が露出したまま残るように、フォトレジストコーティングされた基板材料104に結合される。次いで、基板材料104の各面を、所定の期間にわたってUV光に露光して、露出したフォトレジスト材料を硬化させる。硬化されないフォトレジスト材料を、基板材料104から除去して、裸の材料を露出させる。次いで、基板材料104から素材をエッチングして除去するのを促進するために、基板材料104がエッチング液でコーティングされる。次いで、残りのフォトレジスト材料を基板材料から除去して、検知コイル84を形成する。
【0029】
検知コイル84のサイズおよび形状は、センサ組立体40が、約−200℃から約1000℃の範囲内の温度で動作しているガスタービン構成要素の振動および/または位置を検知することを可能にするように選択される。そのうえ、検知コイル84のサイズおよび形状は、検知コイル84が、フォトエッチングおよび/またはレーザー切断を用いて製作され得て、例えばチタンまたは超合金などの高耐熱性材料を含む基板材料104を含み得るように選択される。本明細書で説明された監視システムは、高温構成要素および低温構成要素を監視する近接センサを設けることにより、既知の監視システムを使用して監視され得る構成要素と比較して、監視され得るエンジン構成要素の数を増加することを容易にする。また、フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、検知コイルの寸法形状を最適化して、最小限の電気抵抗ならびに小さな巻き線間静電容量を維持するようにコイルの電気的特性を改善することができる。そのため、検知コイルの線形範囲および近接性能が、既知の検知コイルと比較して改善される。
【0030】
前述の方法およびシステムは、高温環境および/または低温環境で動作するデバイス構成要素を監視することができる近接センサを設けることにより、既知の監視システムの少なくともいくつかの不利益を克服する。そのうえ、本明細書で説明された近接センサは、例えばチタン材料または超合金材料などの耐熱材料を含んでいる基板材料を含む。また、本明細書で説明されたセンサ組立体は、フォトエッチングまたはレーザー切断を用いて検知コイルを製作することを容易にする実質的に渦巻き形の平面状検知コイルを含む。フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、既知の監視システムに対して監視システムの製造コストが低減される。
【0031】
デバイスの動作を監視するのに使用するセンサ組立体および同センサ組立体を製作する方法の例示的実施形態が、上記で詳細に説明されている。このシステムおよび方法は、本明細書で説明された特定の実施形態に限定されることなく、むしろ、同システムの構成要素および/または同方法のステップは、本明細書で説明された他の構成要素および/またはステップから独立して別個に利用され得る。例えば、これらの方法は、他の監視システムと組み合わせて用いることもでき、本明細書で説明されたシステムだけとともに実施することに限定されない。むしろ、例示的実施形態は、他の多くの監視システム用途に関連して実施し、かつ利用することができる。
【0032】
本発明の様々な実施形態の特定の特徴が、いくつかの図面で示されて他の図面では示されないこともあるが、これは便宜上の理由のみによるものである。本発明の原理によれば、図面のあらゆる特徴が、その他の図面のあらゆる特徴と組み合わせて参照され、かつ/または特許請求され得る。
【0033】
この書かれた説明は、最善の様式を含めて本発明を開示するために、また、あらゆる当業者が、あらゆるデバイスまたはシステムを製作し使用することならびにあらゆる具体化された方法を実行することを含めて本発明を実施することも可能にするために、実例を用いている。本発明が特許権を受けられる範囲は、特許請求の範囲によって規定され、当業者に想起される他の実例を含み得る。そのような他の実例は、それらが特許請求の範囲の文字どおりの言葉と異ならない構造要素を有する場合、またはそれらが特許請求の範囲の文字どおりの言葉との実質のない相違点を有する同等な構造要素を含む場合には、特許請求の範囲に入るように意図されている。
【符号の説明】
【0034】
10 デバイス
12 監視システム
14 吸気区間
16 圧縮機区間
18 燃焼器区間
20 タービン区間
22 排気区間
24 回転子組立体
26 駆動軸
28 中心線軸
30 軸受け
32 燃焼器
34 燃料集合体
36 発電機
38 コンピュータデバイス
40 センサ組立体
42 近接センサ
44 構成要素
46 プロセッサ
48 メモリデバイス
50 ディスプレイ
52 間隙
54 プローブケーシング
56 センサハウジング
58 側壁
60 前部の端壁
62 後部の端壁
64 外面
66 円盤状の本体
68 内面
70 外面
72 半径方向の内面
74 空洞
76 中心線軸
78 中心点
80 第1のコネクタ
82 第2のコネクタ
84 検知コイル
86 渦巻き形
88 巻き
90 平坦な棒
92 接続ケーブル
93 内面
94 空洞
95 開口
96 第1の開口
98 第2の開口
100 第1の接続ケーブル
102 第2の接続ケーブル
104 基板材料
200 方法
202 フォトレジスト材料を堆積する
204 フォトレジストパターンを現像する
206 検知コイルの基板材料をエッチングする
208 検知コイルの基板材料を形成する
210 ハウジングを形成する
212 検知コイルを挿入する
214 ハウジングを形成する
【技術分野】
【0001】
本明細書に開示される内容は、一般に監視システムに関し、より具体的には、デバイスの動作を監視するのに使用されるセンサ組立体に関する。
【背景技術】
【0002】
少なくともいくつかの既知のタービンエンジンシステムは、圧縮機、圧縮機から下流に結合された燃焼器、タービン、および圧縮機とタービンの間に回転可能に結合された回転子組立体を含む。既知のタービンエンジンシステムは、動作中に振動または他の挙動を示す可能性がある。少なくともいくつかの既知のタービンエンジンシステムには、このような挙動を測定して、例えば、タービンエンジンシステムの、回転子組立体で示される振動の量、回転子組立体の回転速度、および/またはその他の適切な動作特性を求める1つまたは複数のセンサを含んでいる監視システムが含まれる。少なくともいくつかの既知の監視システムは、回転子組立体など回転機械の構成要素の異常および/または欠陥を検出するのに、渦電流(EC)センサを使用する。他の既知のEC検査デバイスは、亀裂、ノック音、くぼみ、材料の隆起および/または構成要素の表面上の他の表面欠陥を検出するために、かつ/または構成要素の導電率および/または密度を含む構成要素の材料特性を評価するために使用される。
【0003】
既知のタービンエンジンシステムは、一般に比較的高温で動作する。少なくともいくつかの既知のエンジン構成要素は、既知のECセンサの損傷、信号の劣化、信号強度の低下、および/または信号の信頼性の低下をもたらす可能性がある高温で動作する。そのため、比較的高温で動作するエンジン構成要素の監視にECセンサを使用するのは、制限されるかまたは不可能なことがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7260991号明細書
【発明の概要】
【0005】
本発明の目的は、高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサおよび製作方法を提供することである。
【0006】
一態様では、センサ組立体が提供される。このセンサ組立体は、ハウジング内の空洞を画定する内面を含んでいるハウジング、および空洞の中に配置された近接センサを含む。この近接センサは、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する。
【0007】
別の態様では、デバイスの動作を監視するためのシステムが提供される。このシステムは、デバイスの状態を監視するためのコンピュータデバイスおよびコンピュータデバイスに結合されたセンサ組立体を含む。このセンサ組立体は、デバイスの構成要素の位置を検知して、検知された位置を示す信号を生成するように構成される。このセンサ組立体は、ハウジング内の空洞を画定する内面を備えるハウジング、および空洞の中に配置された近接センサを含む。この近接センサは、第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む。検知コイルは、第2のコネクタが第1のコネクタから半径方向の外側になるように、第1のコネクタから外側に延在する実質的な渦巻き形を有する。
【0008】
さらに別の態様では、デバイスの構成要素を監視するのに使用されるセンサ組立体を製作する方法が提供される。この方法は、検知コイルの基板材料の外面にわたってフォトレジスト材料を堆積するステップを含む。第1のコネクタ、第2のコネクタ、および第1のコネクタと第2のコネクタの間に延在する実質的に平面状の検知コイルを含む近接センサと実質的に類似の形状を有するフォトレジストパターンが、検知コイルの基板材料上に現像される。このセンサ基板材料がエッチングされて、近接センサを形成する。
【図面の簡単な説明】
【0009】
【図1】例示的デバイスの概略図である。
【図2】図1に示されたデバイスとともに使用され得る例示的センサ組立体の断面図である。
【図3】図2に示されたセンサ組立体の、ライン3−3に沿って得られた部分的断面図である。
【図4】図2に示されたセンサ組立体の、ライン4−4に沿って得られた別の部分的断面図である。
【図5】図2に示されたセンサ組立体を製作するのに用いられ得る例示的方法の流れ図である。
【発明を実施するための形態】
【0010】
本明細書で説明される例示的方法およびシステムは、高温環境および/または低温環境で動作するデバイスの構成要素を監視する近接センサを提供することにより、既知の監視システムの少なくともいくつかの不利益を克服する。そのうえ、本明細書で説明される近接センサは、例えばチタン材料などの耐熱材料または超合金材料を含む基板材料を含んでいる平面状で実質的に渦巻き形の検知コイルを含む。また、平面状の検知コイルを含んでいる近接センサを提供することにより、フォトエッチングまたはレーザー切断を用いて検知コイルを製作することができる。高温構成要素および低温構成要素を監視する近接センサを設けることにより、本明細書で説明される監視システムは、監視され得るエンジン構成要素数の増加を促進する。また、フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、検知コイルの寸法形状を最適化して、最小限の電気抵抗ならびに小さな巻き線間静電容量を維持するようにコイルの電気的特性を改善することができる。そのため、検知コイルの線形範囲および近接性能が改善される。
【0011】
図1は例示的デバイス10の概略図である。図2は、デバイス10とともに使用することができる例示的監視システム12のブロック図である。この例示的実施形態では、デバイス10は、一般に比較的高い動作温度で動作するタービンエンジンである。しかし、本明細書で説明される本発明が、あらゆる適切なデバイスで同様に実施され得て、タービンエンジンでの実施だけに限定されないとことが、本明細書の教示によって導かれた当業者には明らかであろう。例えば、デバイス10は、例えば比較的低温で動作する低温システムなどの冷房装置でよい。したがって、本明細書で説明され、かつ図示されるタービンエンジン10は、説明のためだけのものであり、あらゆる態様において、本明細書で説明される装置および/または方法を限定するようには意図されていない。一実施形態では、タービンエンジン10は、ニューヨーク州スケネクタディのゼネラルエレクトリック社によって提供される9FAタービンまたは類似のデバイスでよい。
【0012】
この例示的実施形態では、タービンエンジン10は、吸気区間14、吸気区間14から下流に結合された圧縮機区間16、圧縮機区間16から下流に結合され燃焼器区間18、燃焼器区間18から下流に結合されたタービン区間20、および排気区間22を含む。回転子組立体24は、タービン区間20および圧縮機区間16に結合され、タービン区間20と圧縮機区間16の間に中心線軸28に沿って延在する駆動軸26を含む。また、回転子組立体24は、駆動軸26を支持するために、少なくとも1つの軸受け30などの少なくとも1つの支持要素も含む。燃焼器区間18は、複数の燃焼器32を含む。燃焼器区間18は、燃焼器32が各圧縮機区間16と流れ連絡するように圧縮機区間16に結合される。
【0013】
燃料集合体34が各燃焼器32に結合され、燃焼器32に燃料の流れを供給する。タービン区間20は、タービンエンジン10の動作中は電気エネルギーを供給するために、圧縮機区間16および発電機36に対して駆動軸26で回転可能に結合される。発電機36は、例えば電力系統に電力を分配するための電気公益事業の送電網(図示せず)などの電源に結合される。
【0014】
この例示的実施形態では、監視システム12は、複数のセンサ組立体40に結合されるコンピュータデバイス38を含む。各センサ組立体40は、タービンエンジン10の動作および環境条件に関する様々な動作パラメータを検出する。センサ組立体40は、振動センサ、位置センサ、温度センサ、加速度センサ、液圧センサ、電力負荷センサ、および/またはタービンエンジン10の動作に関する様々なパラメータを検知する他のセンサを含み得るが、これら以外のものを含まないように限定されることはない。本明細書で用いられる用語「パラメータ」は、構成要素の相対位置、振動、温度、液圧、電力負荷、回転速度、および定義された位置における流体の流れなど、その値がタービンエンジン10の動作条件および環境条件を定義するのに用いられ得る物理的性質を指す。
【0015】
この例示的実施形態では、監視システム12は、少なくとも1つのセンサ組立体40を近接センサ42の形で含む。例えば圧縮機区間16、タービン区間20、駆動軸26ならびに/あるいは構成要素44が回転するときの同構成要素の振動および/または相対位置を検知するためのベアリング30などといったタービンエンジン10の構成要素44に隣接して、近接センサ42が配置される。近接センサ42は、コンピュータデバイス38に結合され、近接センサ42に対する構成要素44の位置を検知して、検知された位置をコンピュータデバイス38に伝送するように構成される。
【0016】
コンピュータデバイス38は、プロセッサ46およびメモリデバイス48を含む。プロセッサ46は、近接センサ42と通信結合され、1つまたは複数のシステムおよびマイクロコントローラ、マイクロプロセッサ、縮小命令セットコンピュータ(RISC)、特定用途向け集積回路(ASIC)、プログラマブルロジック回路(PLC)、フィールドプログラマブルゲートアレイ(FPGA)、および本明細書で説明される機能を実行することができる他の回路を含み得る任意の適切なプログラマブル回路を含む。本明細書で説明される方法は、限定することなく記憶デバイスおよび/またはメモリデバイスを含む非一時的コンピュータ読取り可能媒体で実施される、実行可能な命令として符号化することができる。このような命令がプロセッサによって実行されると、プロセッサは、本明細書で説明される方法の少なくとも一部分を実行する。上記の実例は単なる例示であり、したがって、用語「プロセッサ」の定義および/または意味を限定するようには少しも意図されていない。この例示的実施形態では、メモリデバイス48は、実行可能な命令および/または他のデータなどの情報を、選択的に記憶し、かつ引き出すことができる1つまたは複数のデバイスである。メモリデバイス48は、限定することなく、ダイナミックランダムアクセスメモリ(DRAM)、スタティックランダムアクセスメモリ(SRAM)、固体ディスク、および/またはハードディスクなどの1つまたは複数のコンピュータ読取り可能媒体を含むことができる。メモリデバイス48は、限定することなく、本明細書で説明される方法とともに用いるのに適切な実行可能命令および/またはその他のタイプのデータを記憶するように構成することができる。
【0017】
コンピュータデバイス38は、ユーザに対する図的表現および/または通知を表示するためのディスプレイ50も含む。ディスプレイ50は、プロセッサ46に結合され、真空蛍光ランプディスプレイ(VFD)および/または1つもしくは複数の発光ダイオード(LED)を含むことができる。それに加えて、またはその代わりに、ディスプレイ50は、限定することなく、液晶ディスプレイ(LCD)、ブラウン管(CRT)、プラズマディスプレイ、ならびに/あるいはユーザに対して画像データおよび/またはテキストを表示することができる任意の適切な視覚的出力デバイスを含むことができる。この例示的実施形態では、構成要素44の振動、構成要素44の位置、および/またはその他の情報が、ユーザに対してディスプレイ50に表示され得る。また、構成要素44の振動および/または位置の図的表現が、ユーザに対してディスプレイ50に表示され得る。
【0018】
動作中、吸気区間14が、空気を圧縮機区間16の方へ導く。圧縮機区間16は、流入空気を、より高い圧力および温度へと圧縮し、圧縮空気を燃焼器区間18の方へ放出する。燃料が、燃料集合体34から各燃焼器32へと導かれ、そこで圧縮空気と混合されて、燃焼器区間18で点火される。燃焼器区間18が、燃焼ガスをタービン区間20へと導き、そこでガス流れの熱エネルギーが機械的回転エネルギーに変換されて、圧縮機区間16および/または発電機36を駆動する。排気ガスは、タービン区間20を出て、排気区間22を通って周囲の大気または熱回復システムなどの利用位置へと流れる。この例示的実施形態では、近接センサ42が、構成要素44の位置および/または振動を示す信号を生成するために渦電流を生成する。より具体的には、近接センサ42は、駆動軸26と近接センサ42の間の間隙または空間などの、回転機械の諸構成要素44の間の間隙52または空間を示す信号を生成するために渦電流を生成する。近接センサ42は、信号を、連続的に、周期的に、もしくは1回だけ、および/またはコンピュータデバイス38による構成要素44の状態監視を可能にするその他の信号タイミングで、伝送することができる。そのうえ、近接センサ42は、アナログ形式またはデジタル形式のいずれかで信号を伝送することができる。コンピュータデバイス38は、近接センサ42から生成された信号を受け取り、受け取った信号に少なくとも部分的に基づいて、構成要素44の振動および/または位置を計算する。また、コンピュータデバイス38は、構成要素44の計算された位置および/または計算された振動の図的表現をディスプレイ50上に表示する。そのうえ、構成要素44の状態が所定の閾値を超えた場合、コンピュータデバイス38は、可聴警報信号または視覚警報信号を生成してよい。
【0019】
図2は、例示的センサ組立体40の断面図である。図3は、ほぼライン3−3に沿って得られたセンサ組立体40の部分的断面図である。図4は、ほぼライン4−4に沿って得られたセンサ組立体40の部分的断面図である。この例示的実施形態では、センサ組立体40は、プローブケーシング54、ケーシング54に結合されたセンサハウジング56、およびセンサハウジング56の中に配置された近接センサ42を含む。センサハウジング56は、前部の端壁60と反対側の後部の端壁62の間に延在する側壁58を含む。後部の端壁62は、プローブケーシング54に前部の端壁60より接近しており、センサハウジング56がプローブケーシング54から支持されるように配置されている。
【0020】
この例示的実施形態では、センサハウジング56は、実質的に円板の形状を有する外面64も含む。前部の端壁60および後部の端壁62は、それぞれが、内面68と外面70の間に延在する円盤状の本体66を含む。側壁58は、半径方向に内面72を含み、内面72は、実質的に円筒状であって、空洞74を画定する。空洞74は、前部の端壁60と後部の端壁62の間に延在する。内面72は、端壁60と端壁62の間の中心線軸76に沿って軸方向に延在する。空洞74は、近接センサ42を受け取るようにサイズ設定して成形される。代替実施形態では、ハウジング56は、三角形、正方形、長方形、多角形、またはセンサ組立体40が本明細書で説明されるように機能することを可能にする任意の適切な形状でよい。
【0021】
図3および図4を参照すると、この例示的実施形態では、3つの直交する軸X、Y、およびZが近接センサ42を通って延在し、近接センサ42に対して3次元デカルト座標系を定義する。より具体的には、この例示的実施形態では、Z軸は、近接センサ42の中心点78と実質的に共軸であり、X軸とY軸が交差してXY基準面を形成する。この例示的実施形態では、近接センサ42は、第1のコネクタ80、第2のコネクタ82、および第1のコネクタ80と第2のコネクタ82の間に延在する検知コイル84を含む。
【0022】
検知コイル84は、実質的に平面状であり、XY基準面に実質的に含まれている実質的な渦巻き形86を有する。検知コイル84は、第2のコネクタ82が第1のコネクタ80から半径方向の外側に配置されるように、第1のコネクタ80から外側に延在する複数の巻き88を含む。代替実施形態では、検知コイル84は、三角形、正方形、長方形、多角形、または近接センサが本明細書で説明されるように機能することを可能にする任意の適切な形状を含むことができる。
【0023】
この例示的実施形態では、第1のコネクタ80が中心点78に対して配向され、検知コイル84が第1のコネクタ80から外側に延在し、第2のコネクタ82は、X軸に沿って第1のコネクタ80から第1の距離D1に配置され、Y軸に沿って第1のコネクタ80から第2の距離D2に配置される。この例示的実施形態では、第2のコネクタ82がY軸に対して実質的に平行に配向され、第1のコネクタ80がX軸に対して実質的に平行に配向されて、第2のコネクタ82は、XY基準面内で第1のコネクタ80に対して実質的に垂直に配向される。代替実施形態では、第2のコネクタ82が第1のコネクタ80に対して斜めに配向されてよく、あるいは、第2のコネクタ82が第1のコネクタ80に対して実質的に平行に配向されてよい。一実施形態では、検知コイル84は、第1のコネクタ80が中心線軸76に対して配向されるように、ハウジングの空洞74の中に配置される。あるいは、検知コイル84は、第1のコネクタ80が、中心線軸76から、ある距離だけオフセットされるように、ハウジング56の中に配置されてもよい。
【0024】
検知コイル84は、実質的に平坦な棒90を含み、棒90は、長方形の断面形状を有し、X−Y基準面に沿って測定された半径方向の幅W(図2に示されている)およびZ軸に沿って測定された厚さTを含む。代替実施形態では、検知コイル84は、センサ組立体40が本明細書で説明されるように機能することを可能にする任意の適切な断面形状を有することができる。この例示的実施形態では、半径方向の幅Wが厚さTより大きい。あるいは、半径方向の幅Wが厚さT以下でもよい。
【0025】
この例示的実施形態では、センサ組立体40には、検知コイル84とコンピュータデバイス38の間に延在して、検知コイル84をコンピュータデバイス38(図1に示されている)に対して電気的に結合する1つまたは複数の接続ケーブル92が含まれる。各接続ケーブル92が、1つまたは複数の電線(図示せず)を含むことができる。プローブケーシング54は、コンピュータデバイス38からプローブケーシング54を通って検知コイル84まで延在する接続ケーブル92を受け取るようにサイズ設定されている空洞94を画定する内面93を含む。ハウジング56は、そこに画定された1つまたは複数の開口95を含み、開口95のそれぞれが、コンピュータデバイス38に対する検知コイル84の電気的結合を容易にするために、そこを通る1つまたは複数の接続ケーブル92を受け取るようにサイズ設定して成形される。この例示的実施形態では、後部の端壁62は、第1のコネクタ80に対して配向された第1の開口96、および第2の開口98に対して配向された第2の開口98を含む。第1の接続ケーブル100は、第1の開口96を通って延在して第1のコネクタ80に結合される。第2の接続ケーブル102は、第2の開口98を通って延在して第2のコネクタ82に結合される。
【0026】
この例示的実施形態では、センサ組立体40は、約−200℃から約1000℃の範囲内の動作温度の環境で稼働することができる。この例示的実施形態では、ハウジング56およびプローブケーシング54のそれぞれが、少なくとも部分的にセラミック材料から製作される。一実施形態では、ハウジング56およびプローブケーシング54のそれぞれが、アルミナ(例えば92%のアルミナ)、窒化アルミニウム、ホウ珪酸ガラス、水晶、サイアロン、低温で同時焼成されたセラミック、窒化シリコン、アルミナ、炭化シリコン、サファイア、ジルコニア、またはその他の適切な工業用セラミック材料のうち少なくとも1つを含む材料から製作される。この例示的実施形態では、検知コイル84は、チタン材料を含んでいる基板材料104を含む。代替実施形態では、基板材料104は、例えばInconel(登録商標)またはIncoloy(登録商標)などの超合金を含む。あるいは、基板材料104は、ステンレス鋼または例えばニッケルコバルトなどのニッケル合金を含む。この例示的実施形態では、検知コイル84は、実質的に平坦な板から、フォトエッチングまたはレーザー切断を用いて製作される。
【0027】
図5は、センサ組立体40を製作するのに実行され得る例示的方法200の流れ図である。この例示的実施形態では、方法200は、検知コイルの基板材料104の外面にわたってフォトレジスト材料を堆積するステップ202を含む。204で、検知コイルの基板材料104にわたって現像されたフォトレジストパターンは、第1のコネクタ80、第2のコネクタ82、および検知コイル84を含んでいる近接センサ42に対して実質的に類似した形状を有し、検知コイル84は、一般に渦巻き形に成形される。検知コイルの基板材料104は、次いで、206でエッチングされて近接センサ42を形成する。この例示的実施形態では、方法200は、チタン材料および超合金材料のうち少なくとも1つを含んでいる材料から検知コイルの基板材料104を形成するステップ208を含む。また、方法200は、空洞74を含むハウジング56を形成するステップ210、および空洞74に検知コイル84を挿入して近接センサ42を形成するステップ212も含む。そのうえ、方法200は、少なくとも1つのセラミック材料からハウジング56を形成するステップ214を含むことができる。一実施形態では、方法200は、アルミナ(例えば92%のアルミナ)、窒化アルミニウム、ホウ珪酸ガラス、水晶、サイアロン、低温で同時焼成されたセラミック、窒化シリコン、アルミナ、炭化シリコン、サファイア、およびジルコニアのうち少なくとも1つを含んでいる材料からハウジング56およびプローブケーシング54を形成するステップ214を含む。
【0028】
一実施形態では、基板材料104の第1の面および反対側の第2の面にわたってフォトレジスト材料が堆積される。次いで、検知コイル84の画像が、例えばマイラーシートなどの複数の膜シート上にプリントされる。プリントされた各シートは、基板材料104の各面に取り付けられ、基板材料104の各面が検知コイル84の実質的に同一の画像を含むように配向される。プリントされたシートは、検知コイル84の形状に対応する部分のフォトレジスト材料が露出したまま残るように、フォトレジストコーティングされた基板材料104に結合される。次いで、基板材料104の各面を、所定の期間にわたってUV光に露光して、露出したフォトレジスト材料を硬化させる。硬化されないフォトレジスト材料を、基板材料104から除去して、裸の材料を露出させる。次いで、基板材料104から素材をエッチングして除去するのを促進するために、基板材料104がエッチング液でコーティングされる。次いで、残りのフォトレジスト材料を基板材料から除去して、検知コイル84を形成する。
【0029】
検知コイル84のサイズおよび形状は、センサ組立体40が、約−200℃から約1000℃の範囲内の温度で動作しているガスタービン構成要素の振動および/または位置を検知することを可能にするように選択される。そのうえ、検知コイル84のサイズおよび形状は、検知コイル84が、フォトエッチングおよび/またはレーザー切断を用いて製作され得て、例えばチタンまたは超合金などの高耐熱性材料を含む基板材料104を含み得るように選択される。本明細書で説明された監視システムは、高温構成要素および低温構成要素を監視する近接センサを設けることにより、既知の監視システムを使用して監視され得る構成要素と比較して、監視され得るエンジン構成要素の数を増加することを容易にする。また、フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、検知コイルの寸法形状を最適化して、最小限の電気抵抗ならびに小さな巻き線間静電容量を維持するようにコイルの電気的特性を改善することができる。そのため、検知コイルの線形範囲および近接性能が、既知の検知コイルと比較して改善される。
【0030】
前述の方法およびシステムは、高温環境および/または低温環境で動作するデバイス構成要素を監視することができる近接センサを設けることにより、既知の監視システムの少なくともいくつかの不利益を克服する。そのうえ、本明細書で説明された近接センサは、例えばチタン材料または超合金材料などの耐熱材料を含んでいる基板材料を含む。また、本明細書で説明されたセンサ組立体は、フォトエッチングまたはレーザー切断を用いて検知コイルを製作することを容易にする実質的に渦巻き形の平面状検知コイルを含む。フォトエッチングおよび/またはレーザー切断を用いて製作され得る平面状の検知コイルを用意することにより、既知の監視システムに対して監視システムの製造コストが低減される。
【0031】
デバイスの動作を監視するのに使用するセンサ組立体および同センサ組立体を製作する方法の例示的実施形態が、上記で詳細に説明されている。このシステムおよび方法は、本明細書で説明された特定の実施形態に限定されることなく、むしろ、同システムの構成要素および/または同方法のステップは、本明細書で説明された他の構成要素および/またはステップから独立して別個に利用され得る。例えば、これらの方法は、他の監視システムと組み合わせて用いることもでき、本明細書で説明されたシステムだけとともに実施することに限定されない。むしろ、例示的実施形態は、他の多くの監視システム用途に関連して実施し、かつ利用することができる。
【0032】
本発明の様々な実施形態の特定の特徴が、いくつかの図面で示されて他の図面では示されないこともあるが、これは便宜上の理由のみによるものである。本発明の原理によれば、図面のあらゆる特徴が、その他の図面のあらゆる特徴と組み合わせて参照され、かつ/または特許請求され得る。
【0033】
この書かれた説明は、最善の様式を含めて本発明を開示するために、また、あらゆる当業者が、あらゆるデバイスまたはシステムを製作し使用することならびにあらゆる具体化された方法を実行することを含めて本発明を実施することも可能にするために、実例を用いている。本発明が特許権を受けられる範囲は、特許請求の範囲によって規定され、当業者に想起される他の実例を含み得る。そのような他の実例は、それらが特許請求の範囲の文字どおりの言葉と異ならない構造要素を有する場合、またはそれらが特許請求の範囲の文字どおりの言葉との実質のない相違点を有する同等な構造要素を含む場合には、特許請求の範囲に入るように意図されている。
【符号の説明】
【0034】
10 デバイス
12 監視システム
14 吸気区間
16 圧縮機区間
18 燃焼器区間
20 タービン区間
22 排気区間
24 回転子組立体
26 駆動軸
28 中心線軸
30 軸受け
32 燃焼器
34 燃料集合体
36 発電機
38 コンピュータデバイス
40 センサ組立体
42 近接センサ
44 構成要素
46 プロセッサ
48 メモリデバイス
50 ディスプレイ
52 間隙
54 プローブケーシング
56 センサハウジング
58 側壁
60 前部の端壁
62 後部の端壁
64 外面
66 円盤状の本体
68 内面
70 外面
72 半径方向の内面
74 空洞
76 中心線軸
78 中心点
80 第1のコネクタ
82 第2のコネクタ
84 検知コイル
86 渦巻き形
88 巻き
90 平坦な棒
92 接続ケーブル
93 内面
94 空洞
95 開口
96 第1の開口
98 第2の開口
100 第1の接続ケーブル
102 第2の接続ケーブル
104 基板材料
200 方法
202 フォトレジスト材料を堆積する
204 フォトレジストパターンを現像する
206 検知コイルの基板材料をエッチングする
208 検知コイルの基板材料を形成する
210 ハウジングを形成する
212 検知コイルを挿入する
214 ハウジングを形成する
【特許請求の範囲】
【請求項1】
ハウジング(56)であって、前記ハウジング内に空洞(74)を画定する面(72)を備えるハウジング(56)と、
前記空洞内に配置された近接センサ(42)であって、第1のコネクタ(80)、第2のコネクタ(82)、および、前記第1のコネクタと前記第2のコネクタの間に延在する実質的に平面状の検知コイル(84)であって、前記第1のコネクタから外側に、前記第2のコネクタが前記第1のコネクタから半径方向の外側になるように延在する検知コイルを備える検知コイル(84)を備える近接センサとを備えるセンサ組立体(40)。
【請求項2】
前記検知コイル(84)が、実質的に矩形の断面形状を有する実質的に平坦な棒(90)を備える請求項1記載のセンサ組立体(40)。
【請求項3】
前記センサ組立体が、約−200℃から約1000℃の範囲内の動作温度を含む環境で動作するように構成される請求項1記載のセンサ組立体(40)。
【請求項4】
前記検知コイル(84)が、チタンおよび超合金のうち少なくとも1つを含んでいる基板材料(104)を含む請求項1記載のセンサ組立体(40)。
【請求項5】
前記ハウジング(56)がセラミック材料を備える請求項1記載のセンサ組立体(40)。
【請求項6】
前記検知コイル(84)が、前記第1のコネクタ(80)から前記第2のコネクタ(82)まで外側に延在する実質的な渦巻き形を備える請求項1記載のセンサ組立体(40)。
【請求項7】
前記ハウジング(56)が、前記ハウジングを通って延在する少なくとも1つの開口(95)を備え、前記少なくとも1つの開口が、前記近接センサ(84)のコンピュータデバイス(38)への電気的結合を可能にするために、接続ケーブル(92)を受け取るようにサイズ設定される請求項1記載のセンサ組立体(40)。
【請求項8】
前記センサ組立体が、前記デバイス(10)の構成要素(44)と前記センサ組立体の間の間隙(52)を示す信号を生成するために渦電流を生成する請求項1記載のセンサ組立体(40)。
【請求項9】
デバイス(10)の動作を監視するためのシステム(12)であって、
前記デバイスの状態を監視するためのコンピュータデバイス(38)と、
前記コンピュータデバイスに結合されたセンサ組立体(40)であって、前記センサ組立体が、前記デバイスの構成要素の位置を検知して、検知された位置を示す信号を生成するように構成され、前記センサ組立体が、
内部に空洞(74)を画定する内面(72)を備えるハウジング(56)と、
前記空洞内に配置された近接センサ(42)であって、第1のコネクタ(80)、第2のコネクタ(82)、および、前記第1のコネクタと前記第2のコネクタの間に延在する実質的に平面状の検知コイル(84)であって、前記第1のコネクタから外側に、前記第2のコネクタが前記第1のコネクタから半径方向の外側になるように延在する検知コイルを備える近接センサとを備えるセンサ組立体とを備えるシステム(12)。
【請求項10】
前記検知コイル(84)が、実質的に長方形の断面形状を有する実質的に平坦な棒(90)を備える請求項9記載のシステム(12)。
【請求項1】
ハウジング(56)であって、前記ハウジング内に空洞(74)を画定する面(72)を備えるハウジング(56)と、
前記空洞内に配置された近接センサ(42)であって、第1のコネクタ(80)、第2のコネクタ(82)、および、前記第1のコネクタと前記第2のコネクタの間に延在する実質的に平面状の検知コイル(84)であって、前記第1のコネクタから外側に、前記第2のコネクタが前記第1のコネクタから半径方向の外側になるように延在する検知コイルを備える検知コイル(84)を備える近接センサとを備えるセンサ組立体(40)。
【請求項2】
前記検知コイル(84)が、実質的に矩形の断面形状を有する実質的に平坦な棒(90)を備える請求項1記載のセンサ組立体(40)。
【請求項3】
前記センサ組立体が、約−200℃から約1000℃の範囲内の動作温度を含む環境で動作するように構成される請求項1記載のセンサ組立体(40)。
【請求項4】
前記検知コイル(84)が、チタンおよび超合金のうち少なくとも1つを含んでいる基板材料(104)を含む請求項1記載のセンサ組立体(40)。
【請求項5】
前記ハウジング(56)がセラミック材料を備える請求項1記載のセンサ組立体(40)。
【請求項6】
前記検知コイル(84)が、前記第1のコネクタ(80)から前記第2のコネクタ(82)まで外側に延在する実質的な渦巻き形を備える請求項1記載のセンサ組立体(40)。
【請求項7】
前記ハウジング(56)が、前記ハウジングを通って延在する少なくとも1つの開口(95)を備え、前記少なくとも1つの開口が、前記近接センサ(84)のコンピュータデバイス(38)への電気的結合を可能にするために、接続ケーブル(92)を受け取るようにサイズ設定される請求項1記載のセンサ組立体(40)。
【請求項8】
前記センサ組立体が、前記デバイス(10)の構成要素(44)と前記センサ組立体の間の間隙(52)を示す信号を生成するために渦電流を生成する請求項1記載のセンサ組立体(40)。
【請求項9】
デバイス(10)の動作を監視するためのシステム(12)であって、
前記デバイスの状態を監視するためのコンピュータデバイス(38)と、
前記コンピュータデバイスに結合されたセンサ組立体(40)であって、前記センサ組立体が、前記デバイスの構成要素の位置を検知して、検知された位置を示す信号を生成するように構成され、前記センサ組立体が、
内部に空洞(74)を画定する内面(72)を備えるハウジング(56)と、
前記空洞内に配置された近接センサ(42)であって、第1のコネクタ(80)、第2のコネクタ(82)、および、前記第1のコネクタと前記第2のコネクタの間に延在する実質的に平面状の検知コイル(84)であって、前記第1のコネクタから外側に、前記第2のコネクタが前記第1のコネクタから半径方向の外側になるように延在する検知コイルを備える近接センサとを備えるセンサ組立体とを備えるシステム(12)。
【請求項10】
前記検知コイル(84)が、実質的に長方形の断面形状を有する実質的に平坦な棒(90)を備える請求項9記載のシステム(12)。
【図1】



【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−40931(P2013−40931A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−173565(P2012−173565)
【出願日】平成24年8月6日(2012.8.6)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−173565(P2012−173565)
【出願日】平成24年8月6日(2012.8.6)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]