
回転体把持装置
【課題】アンバランス計測時には、翼構造部の回転翼を回転駆動した駆動ガスの昇圧を抑制することができ、アンバランス修正のための除去加工時には、翼構造部を把持して回転体が回転しないようにする。
【解決手段】駆動装置23は、把持ユニット19を、翼構造部8に軸方向に対向する対向位置に移動させることで、把持ユニット19が翼構造部8を把持可能となり、排気流路形成体21を前記対向位置に移動させることで、排気流路形成体21に形成した排気流路内に、回転翼7を駆動した駆動ガスが軸方向に流入するようになっている。
【解決手段】駆動装置23は、把持ユニット19を、翼構造部8に軸方向に対向する対向位置に移動させることで、把持ユニット19が翼構造部8を把持可能となり、排気流路形成体21を前記対向位置に移動させることで、排気流路形成体21に形成した排気流路内に、回転翼7を駆動した駆動ガスが軸方向に流入するようになっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置に関する。
【背景技術】
【0002】
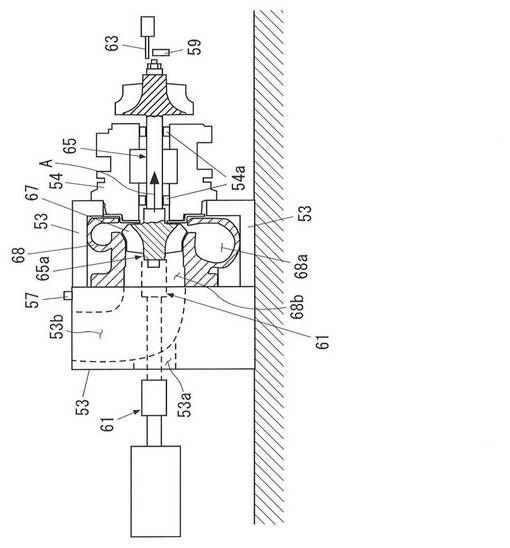
図1は、回転体のアンバランスを計測するとともに、アンバランス修正のために除去加工を行う装置の構成を示す。
当該装置は、支持体53と、加速度センサ57、回転角センサ59、把持装置61、および加工装置63を備える。
支持体53は、回転体65を回転可能に支持する。図1の例では、支持体53には、回転体65を回転可能に支持するラジアル軸受54aが組み込まれた軸受ハウジング54が取り付けられている。これにより、支持体53は、軸受ハウジング54を介して回転体65を回転可能に支持する。
加速度センサ57は、支持体53に取り付けられ、支持体53に発生する加速度(振動)を検出する。
回転角センサ59は、回転体65が初期状態から回転した量を示す回転角を検出する。
加工装置63は、アンバランスが存在する周方向位置において回転体65を部分的に切削することで、アンバランスを取り除く。
【0003】
また、図1において、回転体65は、翼構造部65aを有する。翼構造部65aには、駆動ガスにより回転駆動されるタービン翼67が設けられている。タービン翼67は、タービンハウジング68に収容されている。タービンハウジング68には、駆動ガスをタービン翼67に案内する案内流路68aと、タービン翼67を回転駆動した駆動ガスを外部に排出する排出流路68bが形成されている。
【0004】
アンバランス計測時には、駆動ガスを案内流路68aを通してタービン翼67に供給することで、タービン翼67および回転体65を回転駆動する。この状態で、加速度センサ57が、支持体53に発生する振動を検出しつつ、回転角センサ59が回転体65の回転角を検出する。これら検出した振動と回転角とに基づいて、回転体65に存在するアンバランスの周方向位置と大きさを算出する。
【0005】
除去加工時には、把持装置61が、支持体53に形成された挿入穴53aを通して、図1の破線で示すように翼構造部65a側へ伸張して、回転体65が回転しないように回転体65を把持し、この状態で、計測したアンバランスの周方向位置において、当該アンバランスの大きさに相当する量だけ加工装置63により回転体65を部分的に切削する。これにより、回転体65のアンバランスを取り除く。なお、挿入穴53aは、アンバランス計測時には適宜の手段で閉じられる。
【0006】
上述したアンバランスの計測と修正の方法は、例えば下記の特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−244187号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上述した構成においては、以下の問題点があった。
【0009】
排出流路68bから駆動ガスを受ける排出穴53bが支持体53に形成されている。翼構造部65aに軸方向に対向する位置に把持装置61を配置するため、排出穴53bは、回転翼(タービン翼67)から軸方向後方(図1における左方向)へ延びた後、直ぐに半径方向(図1における上方)に曲って、駆動ガスを当該半径方向に別の排気ダクト(図示せず)へ案内する。このように、排出穴53bが、軸方向から半径方向に急に曲るので、駆動ガスの圧力が高くなり過ぎる。その結果、回転体65の回転速度を規定の速度まで上げることができなくなるとともに、図1の矢印Aの方向にスラスト力が回転体65に作用し回転機械の負荷が過大となる。負荷が過大になると、異常振動が発生し、正確なアンバランス量の計測が困難になるおそれがあった。
【0010】
そこで、本発明の目的は、アンバランス計測時には、翼構造部の回転翼を回転駆動した駆動ガスの昇圧を抑制することができ、除去加工時には、翼構造部を把持して回転体が回転しないようにすることができる装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明によると、回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置であって、
前記回転体は、駆動ガスにより回転駆動される回転翼が設けられた翼構造部を有し、該翼構造部はハウジングに収容されており、該ハウジングには、駆動ガスを前記回転翼に案内する案内流路と、前記回転翼を駆動した駆動ガスを回転体の軸方向に外部へ排出する排出流路とが形成されており、
前記除去加工の時に、翼構造部を把持する把持ユニットと、
回転体のアンバランスを計測するために回転体を回転させている時に、前記排出流路から排出される駆動ガスを流す排気流路を有する排気流路形成体と、
把持ユニットと排気流路形成体を、互いに排他的に、翼構造部に軸方向に対向する対向位置へ移動させる駆動装置と、を備え、
前記駆動装置は、把持ユニットを前記対向位置に移動させることで、把持ユニットが翼構造部を把持可能となり、前記排気流路形成体を前記対向位置に移動させることで、前記排気流路内に、前記排出流路からの駆動ガスが軸方向に流入するようになっている、ことを特徴とする回転体把持装置が提供される。
【0012】
本発明の好ましい実施形態によると、前記駆動装置は、把持装置と排気流路形成体のいずれも前記対向位置以外の位置へ移動させることで、前記対向位置に空間を確保する。
【発明の効果】
【0013】
上述した本発明によると、アンバランス計測時には、排気流路形成体を、翼構造部に軸方向に対向する対向位置へ駆動装置により移動させるので、排出流路からの駆動ガスを、軸方向に排気流路形成体の排気流路に流すことができる。従って、回転翼を回転駆動した駆動ガスを、軸方向に流すことができる範囲を拡大できる。よって、回転翼を回転駆動した駆動ガスの昇圧を抑制することができる。
また、除去加工時には、把持ユニットを、前記対向位置へ駆動装置により移動させるので、把持ユニットにより翼構造体を把持することができる。
【図面の簡単な説明】
【0014】
【図1】回転体のアンバランスの計測と修正を行う装置を示す。
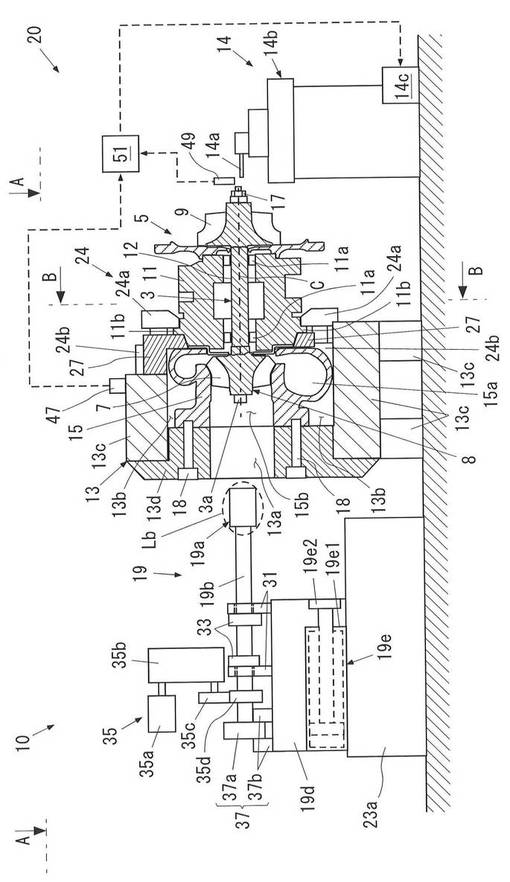
【図2】本発明の実施形態による回転体把持装置をアンバランス計測修正装置に適用した構成を示す。
【図3】図2のA−A矢視簡略図である。
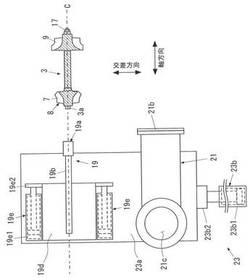
【図4】図2の状態から回転体把持装置と排気流路形成体を移動させ、排気流路形成体を翼構造部に軸方向に対向させた状態を示す。
【図5】図4のA−A矢視簡略図である。
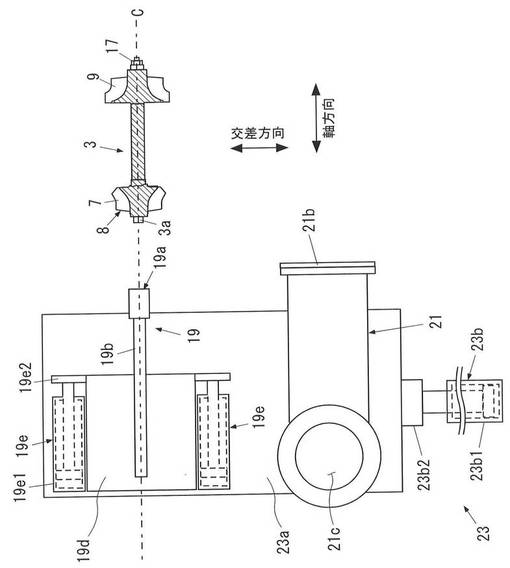
【図6】回転体把持装置と排気流路形成体を、翼構造部に軸方向に対向しない位置へ移動させた状態を示す。
【図7】図2のB−B矢視図である。
【図8】図2の破線Lbで囲んだ部分の拡大図である。
【図9】図2の状態から、把持ユニットの把持部を翼構造部側に前進させた状態を示す。
【発明を実施するための形態】
【0015】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0016】
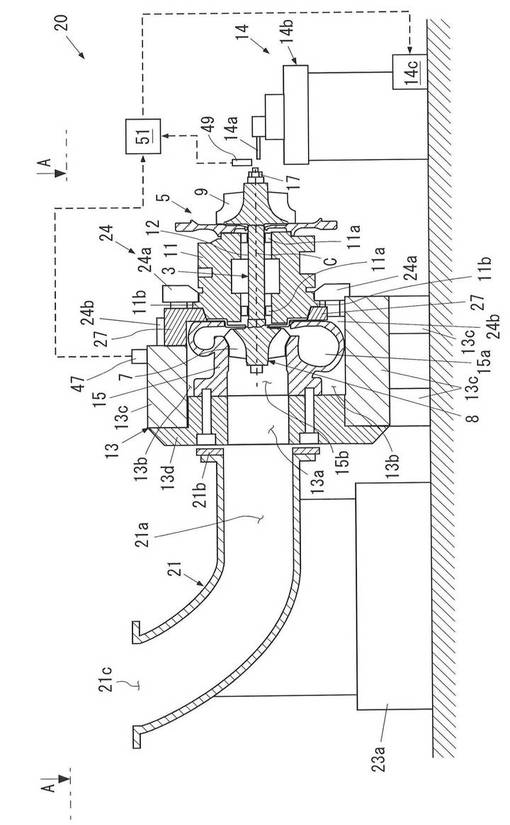
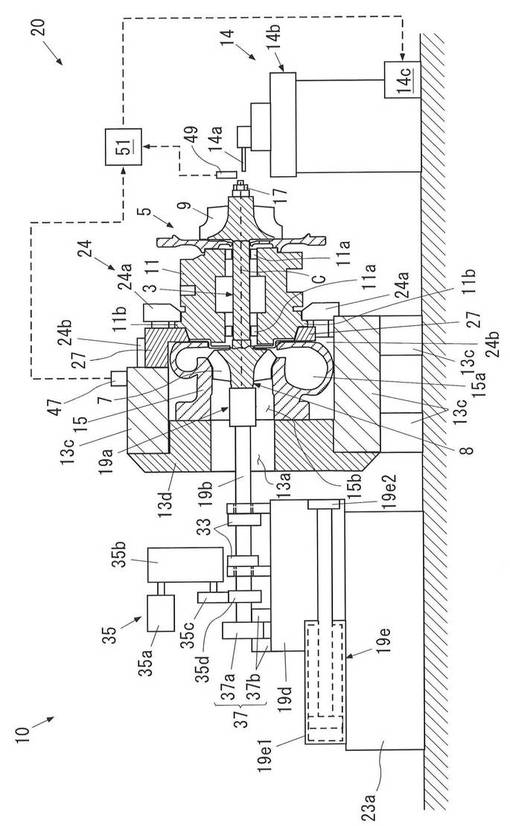
図2は、アンバランス計測修正装置20に、本発明の実施形態による回転体把持装置10を適用した場合を示す。
アンバランス計測修正装置20は、回転体3のアンバランスを計測するとともに、アンバランス修正のために除去加工を行う。
回転体把持装置10は、回転機械5の回転体3に存在するアンバランスを修正するために該回転体3を部分的に除去加工する時に、回転体3が回転しないように回転体3を把持する。
なお、以下において、回転体3の中心軸C周りの方向を単に周方向といい、当該中心軸Cと平行な方向を単に軸方向という。
【0017】
前記回転体3は、駆動ガスにより回転駆動される回転翼7が設けられた翼構造部8を有する。該翼構造部8はハウジング15(この例ではタービンハウジング15)に収容されている。該ハウジング15には、駆動ガスを前記回転翼7に案内する案内流路15aと、前記回転翼7を駆動した駆動ガスを軸方向に外部へ排出する排出流路15bとが形成されている。このハウジング15は、後述の支持体13の内部に取り付けられている。
【0018】
図2では、回転機械5は過給機である。過給機5の回転体3は、図2に示すように、エンジンの排ガスにより回転駆動されるタービン翼7と、タービン翼7と一体的に回転することで圧縮空気をエンジンに供給するコンプレッサ翼9と、一端部にタービン翼7(翼構造部8)が設けられ他端部にコンプレッサ翼9が設けられている回転シャフト12とを有する。
【0019】
また、過給機5は、軸受ハウジング11を有する。軸受ハウジング11の内部には、回転体3を回転可能に支持するラジアル軸受部11aが内部に組み込まれている。なお、過給機5には、コンプレッサ翼9を内部に収容するコンプレッサハウジング(図2では取り外されている)も設けられる。
【0020】
図2において、バランス修正のために、軸受ハウジング11は、支持体13に取り付けられている。これにより、支持体13は、軸受ハウジング11を介して回転体3を回転可能に支持する。
【0021】
支持体13は、タービン翼7を駆動する駆動ガスをタービンハウジング15の案内流路15aへ供給でき、タービン翼7を駆動した当該駆動ガスを、支持体13に形成した排出穴13aを介して支持体13の外部へ排出できるように支持体13が構成されている。
【0022】
回転体3は、回転機械5に設けられ、そのバランス修正のために部分的に除去加工される。そのために、回転体3は、その軸方向端部に、前記除去加工がなされる除去対象部17(図の例ではナット17)を備える。
【0023】
回転体把持装置10は、把持ユニット19、排気流路形成体21、および駆動装置23(図3を参照)を備える。
【0024】
把持ユニット19は、前記除去加工の時に、翼構造部8を把持する。
【0025】
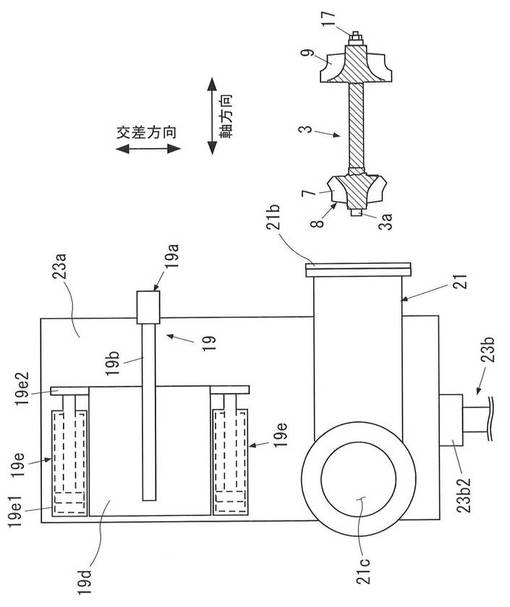
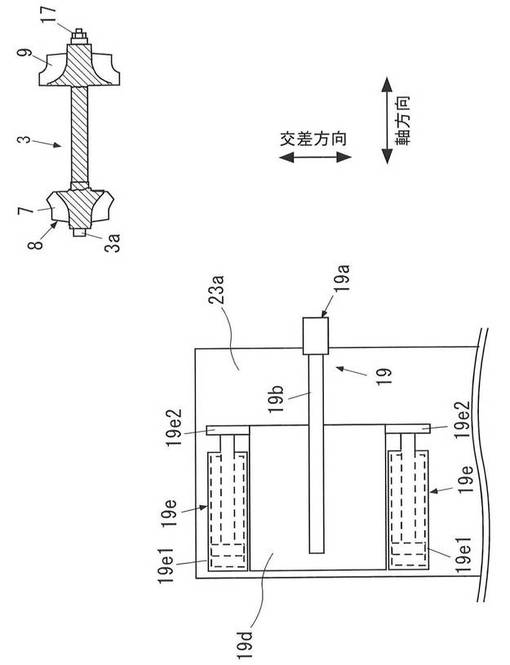
排気流路形成体21には、排気流路21aが形成されている。排気流路21aは、回転体3のアンバランスを計測するために回転体3を回転させている時に、前記排出流路15bから排出される駆動ガスを流す。
【0026】
駆動装置23は、把持ユニット19と排気流路形成体21を、互いに排他的に、翼構造部8に軸方向に対向する対向位置へ移動させる。
図2と図3は、把持ユニット19が、翼構造部8に軸方向に対向する対向位置にある状態を示す。図3は、図2のA−A矢視図であるが、図3において、一部の構成のみを示し他の構成の図示を省略している。図4と図5は、排気流路形成体21が、翼構造部8に軸方向に対向する対向位置にある状態を示す。図5は、図4のA−A矢視図であるが、図5において、一部の構成のみを示し他の構成の図示を省略している。
前記駆動装置23は、把持ユニット19を前記対向位置に移動させることで(図2、図3の状態)、把持ユニット19が翼構造部8を把持可能となり、前記排気流路形成体21を前記対向位置に移動させることで(図4、図5の状態)、前記排気流路21aが、排出流路15bと排出穴13aに軸方向に整合して、排出穴13aを通して、排出流路15bからの駆動ガスを受け入れるようになっている。なお、把持ユニット19は、後述のように、前記対向位置にある時に、排出穴13aと排出流路15bを通して翼構造部8を把持する。
【0027】
駆動装置23は、軸方向と交差する交差方向(図3の例では、軸方向と直交する水平方向)に移動可能な交差方向移動体23aと、交差方向移動体23aを交差方向に移動させる駆動部23bとを有する。駆動部23bは、例えば、前記交差方向に伸縮するエアシリンダ装置と、該エアシリンダ装置に空圧を供給することでエアシリンダ装置を伸縮させる空圧供給装置とからなる。この場合、例えば、図3のように、該エアシリンダ装置のシリンダ23b1は、一定位置に固定され、該エアシリンダ装置のピストン先端23b2は交差方向移動体23aに固定される。
交差方向移動体23aに、把持ユニット19と排気流路形成体21が設置される。交差方向移動体23aにおける把持ユニット19と排気流路形成体21の設置位置は、互いに交差方向にずれている。
【0028】
前記駆動装置23は、図6のように、交差方向移動体23aを交差方向に移動させることで、把持ユニット19と排気流路形成体21のいずれも前記対向位置以外の位置へ移動させることができる。これにより、前記対向位置に空間を確保する。従って、この空間を利用して、後述の閉塞部材13dを支持体13の本体13cから外してタービンハウジング15を他のタービンハウジング15に交換することができる。タービンハウジング15は、支持体13に取り付ける回転体3を別の種類のものに交換する場合に、当該種類の回転体3の翼構造部8の大きさと形状に合わせて交換される。
【0029】
以下、本実施形態について詳細に説明する。
【0030】
支持体13の内部からタービンハウジング15を取り出すための取出穴13bが、前記対向位置の側に前記軸方向に開口するように支持体13に形成されている。支持体13は、取出穴13bを塞ぐ閉塞部材13dを有する。閉塞部材13dは、ボルト(図示せず)などにより支持体13の本体13cに取り外し可能に取り付けられる。図2の例では、この閉塞部材13dに排気口13aが形成される。また、図2の例では、タービンハウジング15は、例えば閉塞部材13dを前記軸方向に貫通するボルト18により、閉塞部材13dに取り付けられ、これにより、閉塞部材13dを介して支持体13に取り付けられる。
【0031】
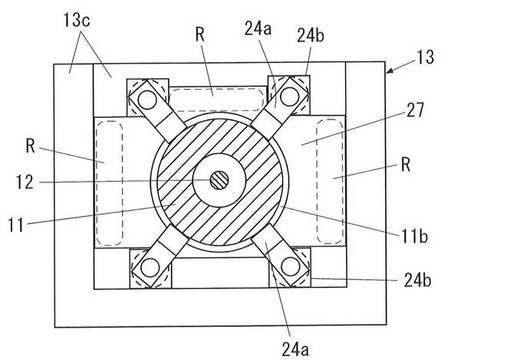
支持体13は、補強部材27を介して軸受ハウジング11を支持する。補強部材27には、翼構造部8を通すための貫通穴(図示せず)が、その中央において図2の左右方向に貫通している。また、支持体13には、図2の右側から支持体13の内部に、翼構造部8を挿入するための挿入穴(図示せず)が、その中央において図2の右方向に開口している。また、補強部材27は、ボルトなどにより支持体13に結合されてもよいし、支持体13と一体成型されてもよい。図2の例では、押圧手段24により、軸受ハウジング11の被押付部11bを補強部材27に押し付ける。押圧手段24は、例えば油圧クランプであり、この場合、油圧クランプ24のクランプロッド24a(例えばスイング式クランプロッド)が、軸受ハウジング11の被押付部11bを補強部材27に前記軸方向に押し付けることで、軸受ハウジング11が補強部材27を介して支持体13に支持される。油圧室を内部に有する油圧クランプ24の本体24bは、支持体13に固定されてよい。このような、油圧クランプ24を、周方向に間隔をおいて複数設けてよい。図7は、図2のB−B矢視図であり、図7の破線で囲まれた範囲Rにおいて、補強部材27は、支持体13に前記軸方向に接触または結合している。
【0032】
把持ユニット19は、回転体3の一端部3aを把持する把持部19aと、該把持部19aが先端に結合された把持シャフト19bとを有する。
【0033】
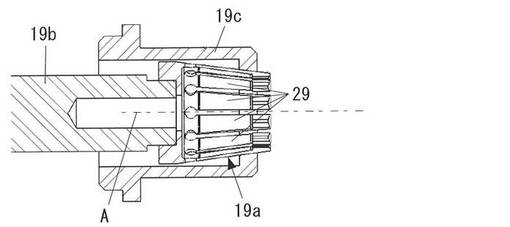
把持部19aは、この例では、コレットチャック19aである。図8は、図2の破線Lbで囲んだ部分の拡大図であり、コレットチャック19aを示す。コレットチャック19aは、その周方向に隙間をおいて配置された複数のコレット爪29を有する。各コレット爪29は、軸方向(図8の左右方向)から傾いて配置されて、各コレット爪29は、先端部(図8の右端部)のほうが後端部(図8の左端部)よりもコレットチャック19aの中心軸Aに近接している。また、複数のコレット爪29は、後端部において一体的に結合されている。コレットチャック19aの後端部は把持シャフト19bの先端部(図8の右端部)に取り付けられ、これによりコレットチャック19aが把持シャフト19bに支持される。把持ユニット19は、円筒形の部材であるクランプ部材19cをさらに有する。クランプ部材19cは、コレットチャック19aおよび把持シャフト19bに嵌合している。また、クランプ部材19cは、軸方向に移動可能となっている。クランプ部材19cを、適宜の手段により、軸方向後方側(図8の左方向)に移動させることで、クランプ部材19cの内面が各コレット爪29をクランプ部材19cの半径方向内側に押圧する。これにより、各コレット爪29が前記半径方向内側に撓み、コレットチャック19aの内部空間に挿入されている回転体3の一端部3aを強固に把持する。
【0034】
把持ユニット19は、さらに、軸方向移動体19dと駆動部19eを備える。
【0035】
軸方向移動体19dは、交差方向移動体23aに設けられ交差方向移動体23aに対し軸方向に移動可能である。軸方向移動体19dは、把持ユニット19が前記対向位置にある状態(図2、図3の状態)で、回転体3の一端部3aを把持ユニット19が把持する前進位置(図9の状態)と、該前進位置から後退した後退位置(図2の状態)との間で前記軸方向に移動可能である。即ち、把持ユニット19が前記対向位置にある状態で、前記後退位置から軸方向移動体19dが前記前進位置まで前記軸方向に移動することで、図9のように、把持部19aが、排気口13aと排出流路15bを通して回転体3の一端部3aを把持する前記前進位置まで移動する。
【0036】
軸方向移動体19dは、駆動部19eに駆動されることで前記軸方向に往復動する。駆動部19eは、例えば、前記軸方向に伸縮するエアシリンダ装置と、該エアシリンダ装置に空圧を供給することでエアシリンダ装置を伸縮させる空圧供給装置とからなる。この場合、例えば、図2のように、該エアシリンダ装置のシリンダ19e1は、交差方向移動体23aに固定され、エアシリンダ装置のピストン先端19e2は軸方向移動体19dに固定される。
【0037】
軸方向移動体19dに関連して、把持ユニット19は、支持部材31、被押圧部材33、回転角調節装置35、および回転阻止機構37をさらに有する。
【0038】
2つの支持部材31が、図2のように、前記軸方向に間隔をおいて軸方向移動体19dに固定される。各支持部材31は、把持シャフト19bが回転できるように把持シャフト19bを支持する。そのために、例えば、各支持部材31には、把持シャフト19bが遊びをもって貫通する貫通孔が形成されている。
【0039】
2つの被押圧部材33は、把持シャフト19bに固定される。一方の被押圧部材33は、前記軸方向の一方側から一方の支持部材31に接触し、他方の被押圧部材33は、前記軸方向の他方側から他方の支持部材31に接触する。この構成で、軸方向移動体19dが前記軸方向に移動すると、軸方向移動体19dが支持部材31を介して被押圧部材33を前記軸方向に押圧することで、把持シャフト19bが軸方向移動体19dと共に前記軸方向に移動する。
【0040】
回転角調節装置35は、把持シャフト19bの回転角を調節する。回転角調節装置35は、軸方向移動体19dに設置され、軸方向移動体19dと共に前記軸方向に移動する。また、回転角調節装置35は、把持部19aが回転体3の一端部3aを把持した状態で、把持シャフト19bを回転させ、これにより、回転体3を回転させ、回転体3の回転角を調節する。図2の例では、回転角調節装置35は、サーボモータ35aと、サーボモータ35aの回転を減速してサーボモータ35aの回転駆動力を出力する減速機35bと、減速機35bの出力軸に固定されたギヤ35cと、このギヤ35cと噛み合い把持シャフト19bに固定された位置調整ギヤ35dと、を有する。
【0041】
回転阻止機構37は、加工具14aが回転体3の除去対象部17を除去加工している時に回転体3を把持した把持部19aが回転してしまわないように、把持シャフト19bをその周方向に固定する。例えば、回転阻止機構37は、把持シャフト19bに固定され把持シャフト19bから把持シャフト19bの半径方向に突出したフランジ部37aと、このフランジ部37aを軸方向に強固に挟み込むクランプ装置37bとを有するものであってよい。このクランプ装置37bは軸方向移動体19dに固定されるが、その固定位置が適宜の手段によって調節可能になっている。
【0042】
アンバランス計測修正装置20は、回転体3のアンバランス計測を行う。そのために、アンバランス計測修正装置20は、加速度センサ47、回転角センサ49、および演算器51を備える。
【0043】
加速度センサ47は、支持体13に取り付けられる。加速度センサ47は、回転体3が回転している状態で、支持体13の加速度(即ち、振動)を検出する。回転体3の回転は、上述したように、支持体13の外部からタービンハウジング15の案内流路15aに駆動ガスを供給することで行う。これにより、当該駆動ガスによりタービン翼7が回転駆動されて回転体3が回転する。
【0044】
この時、駆動部23bにより、排気流路形成体21は、前記対向位置に移動させられているので、タービン翼7を回転駆動した駆動ガスは、排出流路15bから排出穴13aを通して排気流路21aへ流入する。排気流路21aへ流入した駆動ガスは、排気流路21aの出口である開口部21cに接続されたダクト(図示せず)内に流入してよい。
また、排気流路形成体21が前記対向位置にある時に、排気流路形成体21と支持体13との間に隙間が存在するようになっている。これにより、排気流路形成体21が支持体13に接触しないようになっているので、加速度センサ47で支持体13の振動を計測する時に、排気流路形成体21が当該振動計測に影響を与えることがない。
なお、図4のように、排気流路形成体21における支持体13側の端面には、支持体13の構成材料(鉄等の金属)より柔らかいテフロン(登録商標)などの樹脂材料で形成された被膜21bを取り付けておくのがよい。これにより、排気流路形成体21を交差方向に移動させる時に、万一、被膜21bが支持体13に接触しても、支持体13が損傷しない。また、前記対向位置にある時に、排気流路形成体21が被膜21bを介して支持体13に接触するようにした場合に、被膜21bが柔らかいので、被膜21bにより、この接触による振動計測への影響を抑制しつつ、駆動ガスをシールすることができる。
【0045】
回転角センサ49は、回転体3の回転角を検出する。この回転角は、回転体3が1回転することでゼロ度〜360度まで変化する。回転角センサ49は、回転体3のコンプレッサ翼9側端部付近に設けられるが、不使用時には、図示しない装置により、後述の加工具14aと干渉しない位置に移動させられる。
【0046】
演算器51は、加速度センサ47が検出した前記加速度と回転角センサ49が検出した前記回転角との関係を表す振動データを生成し、さらに、この振動データから、影響係数を用いて回転体3のアンバランスデータを算出する。アンバランスデータは、回転体3においてアンバランスが存在する周方向位置と、当該アンバランスの大きさとからなる。なお、影響係数は、予め取得しておく。影響係数は、例えば、回転体3に試し錘を取り付けること等により回転体3にバランス変化を与え、このバランス変化による振動データ(前記と同様の振動データ)の変化に基づいて算出される。
【0047】
アンバランス計測修正装置20は、回転体3の除去加工を行う切削装置14を備える。切削装置14は、回転体3の他端部(この例では、コンプレッサ翼9側の端部)にある除去対象部17の一部を除去加工する加工具14a(例えば、エンドミル)と、該加工具14aが取り付けられる可動部14bと、該可動部14bを移動させる切削制御部14cと、を有する。この切削制御部14cは、サーボモータを用いて、例えば可動部14bを軸方向、2軸方向(軸方向、および該軸方向と直交する水平方向)または3軸方向(軸方向、軸方向に直交する水平方向、および鉛直方向)に移動させる制御装置である。
【0048】
切削制御部14cは、アンバランスデータに基づいて加工具14aを移動させる。即ち、切削制御部14cは、回転体3においてアンバランスが存在する周方向位置において、当該アンバランスの大きさ(=r×m、ここでrは回転体3の中心軸Cからの距離であり、mは質量である)だけ加工具14aが回転体3を切削するように可動部14bを軸方向に移動させる制御を行う。
【0049】
上述のアンバランス計測修正装置20による除去加工の手順について説明する。まず、上述のように、把持ユニット19が前記対向位置にある状態で、軸方向移動体19dを、把持ユニット19が回転体3の一端部3aを把持する前記前進位置に移動させる。次いで、把持ユニット19の把持部19aが回転体3の一端部3aを把持する。その後、回転阻止機構37により、上述のように、把持シャフト19bを回転しないように固定する。次に、上述のアンバランスデータに基づいて、切削制御部14cが、加工具14を、回転体3においてアンバランスが存在する周方向位置に位置決めし、この状態で、加工具14を、除去対象部17に向けて軸方向に移動させ、これにより、当該アンバランスの大きさ(=r×m、ここでrは回転体3の軸心からの距離であり、mは質量である)だけ除去対象部17を切削する。なお、切削する直前に、回転角調節装置35により、上述のように把持シャフト19bを回転させ、回転体3の回転角を調節してよい。
【0050】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変形例1〜3を、任意に組み合わせて、または単独で採用してもよい。この場合、以下で説明しない点は、上述と同じであってもよいし、適宜変更してもよい。
【0051】
(変形例1)
回転機械5は、過給機でなくてもよく、翼構造部8を有する回転体3を備えるものであればよい。
【0052】
(変形例2)
本発明では、回転体3のアンバランスを除去するために、除去加工により回転体3の一部を除去するが、除去加工は、切削以外の他の加工(例えばレーザ加工)であってもよい。レーザ加工では、回転体3の一部を溶融して除去する。
【0053】
(変形例3)
上述では、除去加工は、軸方向に行われたが、半径方向に除去加工してもよい。
【符号の説明】
【0054】
3 回転体、3a 一端部、5 回転機械、7 回転翼(タービン翼)、8 翼構造部、9 コンプレッサ翼、10 回転体把持装置、11 軸受ハウジング、11a ラジアル軸受部、11b 被押付部,12 回転シャフト、13 支持体、13a 排出穴、13b 取出穴、13c 支持体の本体、13d 閉塞部材、14 切削装置、14a 加工具、14b 可動部、14c 切削制御部、15 タービンハウジング、15a 案内流路、15b 排出流路、16 ボルト、17 除去対象部、18 ボルト、19 把持ユニット、19a 把持部(コレットチャック)、19b 把持シャフト、19c クランプ部材、19d 軸方向移動体、19e 駆動部、19e1 シリンダ、19e2 ピストン先端、20 アンバランス計測修正装置、21 排気流路形成体、21a 排気流路、21b 被膜、21c 開口部、23 駆動装置、23a 交差方向移動体、23b 駆動部、23b1 シリンダ、23b2 ピストン先端、24 押圧手段、24a クランプロッド、24b 油圧クランプの本体、27 補強部材、29 コレット爪、31 支持部材、33 被押圧部材、35 回転角調節装置、37 回転阻止機構、37a フランジ部、37b クランプ装置、47 加速度センサ、49 回転角センサ、51 演算器
【技術分野】
【0001】
本発明は、回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置に関する。
【背景技術】
【0002】
図1は、回転体のアンバランスを計測するとともに、アンバランス修正のために除去加工を行う装置の構成を示す。
当該装置は、支持体53と、加速度センサ57、回転角センサ59、把持装置61、および加工装置63を備える。
支持体53は、回転体65を回転可能に支持する。図1の例では、支持体53には、回転体65を回転可能に支持するラジアル軸受54aが組み込まれた軸受ハウジング54が取り付けられている。これにより、支持体53は、軸受ハウジング54を介して回転体65を回転可能に支持する。
加速度センサ57は、支持体53に取り付けられ、支持体53に発生する加速度(振動)を検出する。
回転角センサ59は、回転体65が初期状態から回転した量を示す回転角を検出する。
加工装置63は、アンバランスが存在する周方向位置において回転体65を部分的に切削することで、アンバランスを取り除く。
【0003】
また、図1において、回転体65は、翼構造部65aを有する。翼構造部65aには、駆動ガスにより回転駆動されるタービン翼67が設けられている。タービン翼67は、タービンハウジング68に収容されている。タービンハウジング68には、駆動ガスをタービン翼67に案内する案内流路68aと、タービン翼67を回転駆動した駆動ガスを外部に排出する排出流路68bが形成されている。
【0004】
アンバランス計測時には、駆動ガスを案内流路68aを通してタービン翼67に供給することで、タービン翼67および回転体65を回転駆動する。この状態で、加速度センサ57が、支持体53に発生する振動を検出しつつ、回転角センサ59が回転体65の回転角を検出する。これら検出した振動と回転角とに基づいて、回転体65に存在するアンバランスの周方向位置と大きさを算出する。
【0005】
除去加工時には、把持装置61が、支持体53に形成された挿入穴53aを通して、図1の破線で示すように翼構造部65a側へ伸張して、回転体65が回転しないように回転体65を把持し、この状態で、計測したアンバランスの周方向位置において、当該アンバランスの大きさに相当する量だけ加工装置63により回転体65を部分的に切削する。これにより、回転体65のアンバランスを取り除く。なお、挿入穴53aは、アンバランス計測時には適宜の手段で閉じられる。
【0006】
上述したアンバランスの計測と修正の方法は、例えば下記の特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−244187号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上述した構成においては、以下の問題点があった。
【0009】
排出流路68bから駆動ガスを受ける排出穴53bが支持体53に形成されている。翼構造部65aに軸方向に対向する位置に把持装置61を配置するため、排出穴53bは、回転翼(タービン翼67)から軸方向後方(図1における左方向)へ延びた後、直ぐに半径方向(図1における上方)に曲って、駆動ガスを当該半径方向に別の排気ダクト(図示せず)へ案内する。このように、排出穴53bが、軸方向から半径方向に急に曲るので、駆動ガスの圧力が高くなり過ぎる。その結果、回転体65の回転速度を規定の速度まで上げることができなくなるとともに、図1の矢印Aの方向にスラスト力が回転体65に作用し回転機械の負荷が過大となる。負荷が過大になると、異常振動が発生し、正確なアンバランス量の計測が困難になるおそれがあった。
【0010】
そこで、本発明の目的は、アンバランス計測時には、翼構造部の回転翼を回転駆動した駆動ガスの昇圧を抑制することができ、除去加工時には、翼構造部を把持して回転体が回転しないようにすることができる装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明によると、回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置であって、
前記回転体は、駆動ガスにより回転駆動される回転翼が設けられた翼構造部を有し、該翼構造部はハウジングに収容されており、該ハウジングには、駆動ガスを前記回転翼に案内する案内流路と、前記回転翼を駆動した駆動ガスを回転体の軸方向に外部へ排出する排出流路とが形成されており、
前記除去加工の時に、翼構造部を把持する把持ユニットと、
回転体のアンバランスを計測するために回転体を回転させている時に、前記排出流路から排出される駆動ガスを流す排気流路を有する排気流路形成体と、
把持ユニットと排気流路形成体を、互いに排他的に、翼構造部に軸方向に対向する対向位置へ移動させる駆動装置と、を備え、
前記駆動装置は、把持ユニットを前記対向位置に移動させることで、把持ユニットが翼構造部を把持可能となり、前記排気流路形成体を前記対向位置に移動させることで、前記排気流路内に、前記排出流路からの駆動ガスが軸方向に流入するようになっている、ことを特徴とする回転体把持装置が提供される。
【0012】
本発明の好ましい実施形態によると、前記駆動装置は、把持装置と排気流路形成体のいずれも前記対向位置以外の位置へ移動させることで、前記対向位置に空間を確保する。
【発明の効果】
【0013】
上述した本発明によると、アンバランス計測時には、排気流路形成体を、翼構造部に軸方向に対向する対向位置へ駆動装置により移動させるので、排出流路からの駆動ガスを、軸方向に排気流路形成体の排気流路に流すことができる。従って、回転翼を回転駆動した駆動ガスを、軸方向に流すことができる範囲を拡大できる。よって、回転翼を回転駆動した駆動ガスの昇圧を抑制することができる。
また、除去加工時には、把持ユニットを、前記対向位置へ駆動装置により移動させるので、把持ユニットにより翼構造体を把持することができる。
【図面の簡単な説明】
【0014】
【図1】回転体のアンバランスの計測と修正を行う装置を示す。
【図2】本発明の実施形態による回転体把持装置をアンバランス計測修正装置に適用した構成を示す。
【図3】図2のA−A矢視簡略図である。
【図4】図2の状態から回転体把持装置と排気流路形成体を移動させ、排気流路形成体を翼構造部に軸方向に対向させた状態を示す。
【図5】図4のA−A矢視簡略図である。
【図6】回転体把持装置と排気流路形成体を、翼構造部に軸方向に対向しない位置へ移動させた状態を示す。
【図7】図2のB−B矢視図である。
【図8】図2の破線Lbで囲んだ部分の拡大図である。
【図9】図2の状態から、把持ユニットの把持部を翼構造部側に前進させた状態を示す。
【発明を実施するための形態】
【0015】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0016】
図2は、アンバランス計測修正装置20に、本発明の実施形態による回転体把持装置10を適用した場合を示す。
アンバランス計測修正装置20は、回転体3のアンバランスを計測するとともに、アンバランス修正のために除去加工を行う。
回転体把持装置10は、回転機械5の回転体3に存在するアンバランスを修正するために該回転体3を部分的に除去加工する時に、回転体3が回転しないように回転体3を把持する。
なお、以下において、回転体3の中心軸C周りの方向を単に周方向といい、当該中心軸Cと平行な方向を単に軸方向という。
【0017】
前記回転体3は、駆動ガスにより回転駆動される回転翼7が設けられた翼構造部8を有する。該翼構造部8はハウジング15(この例ではタービンハウジング15)に収容されている。該ハウジング15には、駆動ガスを前記回転翼7に案内する案内流路15aと、前記回転翼7を駆動した駆動ガスを軸方向に外部へ排出する排出流路15bとが形成されている。このハウジング15は、後述の支持体13の内部に取り付けられている。
【0018】
図2では、回転機械5は過給機である。過給機5の回転体3は、図2に示すように、エンジンの排ガスにより回転駆動されるタービン翼7と、タービン翼7と一体的に回転することで圧縮空気をエンジンに供給するコンプレッサ翼9と、一端部にタービン翼7(翼構造部8)が設けられ他端部にコンプレッサ翼9が設けられている回転シャフト12とを有する。
【0019】
また、過給機5は、軸受ハウジング11を有する。軸受ハウジング11の内部には、回転体3を回転可能に支持するラジアル軸受部11aが内部に組み込まれている。なお、過給機5には、コンプレッサ翼9を内部に収容するコンプレッサハウジング(図2では取り外されている)も設けられる。
【0020】
図2において、バランス修正のために、軸受ハウジング11は、支持体13に取り付けられている。これにより、支持体13は、軸受ハウジング11を介して回転体3を回転可能に支持する。
【0021】
支持体13は、タービン翼7を駆動する駆動ガスをタービンハウジング15の案内流路15aへ供給でき、タービン翼7を駆動した当該駆動ガスを、支持体13に形成した排出穴13aを介して支持体13の外部へ排出できるように支持体13が構成されている。
【0022】
回転体3は、回転機械5に設けられ、そのバランス修正のために部分的に除去加工される。そのために、回転体3は、その軸方向端部に、前記除去加工がなされる除去対象部17(図の例ではナット17)を備える。
【0023】
回転体把持装置10は、把持ユニット19、排気流路形成体21、および駆動装置23(図3を参照)を備える。
【0024】
把持ユニット19は、前記除去加工の時に、翼構造部8を把持する。
【0025】
排気流路形成体21には、排気流路21aが形成されている。排気流路21aは、回転体3のアンバランスを計測するために回転体3を回転させている時に、前記排出流路15bから排出される駆動ガスを流す。
【0026】
駆動装置23は、把持ユニット19と排気流路形成体21を、互いに排他的に、翼構造部8に軸方向に対向する対向位置へ移動させる。
図2と図3は、把持ユニット19が、翼構造部8に軸方向に対向する対向位置にある状態を示す。図3は、図2のA−A矢視図であるが、図3において、一部の構成のみを示し他の構成の図示を省略している。図4と図5は、排気流路形成体21が、翼構造部8に軸方向に対向する対向位置にある状態を示す。図5は、図4のA−A矢視図であるが、図5において、一部の構成のみを示し他の構成の図示を省略している。
前記駆動装置23は、把持ユニット19を前記対向位置に移動させることで(図2、図3の状態)、把持ユニット19が翼構造部8を把持可能となり、前記排気流路形成体21を前記対向位置に移動させることで(図4、図5の状態)、前記排気流路21aが、排出流路15bと排出穴13aに軸方向に整合して、排出穴13aを通して、排出流路15bからの駆動ガスを受け入れるようになっている。なお、把持ユニット19は、後述のように、前記対向位置にある時に、排出穴13aと排出流路15bを通して翼構造部8を把持する。
【0027】
駆動装置23は、軸方向と交差する交差方向(図3の例では、軸方向と直交する水平方向)に移動可能な交差方向移動体23aと、交差方向移動体23aを交差方向に移動させる駆動部23bとを有する。駆動部23bは、例えば、前記交差方向に伸縮するエアシリンダ装置と、該エアシリンダ装置に空圧を供給することでエアシリンダ装置を伸縮させる空圧供給装置とからなる。この場合、例えば、図3のように、該エアシリンダ装置のシリンダ23b1は、一定位置に固定され、該エアシリンダ装置のピストン先端23b2は交差方向移動体23aに固定される。
交差方向移動体23aに、把持ユニット19と排気流路形成体21が設置される。交差方向移動体23aにおける把持ユニット19と排気流路形成体21の設置位置は、互いに交差方向にずれている。
【0028】
前記駆動装置23は、図6のように、交差方向移動体23aを交差方向に移動させることで、把持ユニット19と排気流路形成体21のいずれも前記対向位置以外の位置へ移動させることができる。これにより、前記対向位置に空間を確保する。従って、この空間を利用して、後述の閉塞部材13dを支持体13の本体13cから外してタービンハウジング15を他のタービンハウジング15に交換することができる。タービンハウジング15は、支持体13に取り付ける回転体3を別の種類のものに交換する場合に、当該種類の回転体3の翼構造部8の大きさと形状に合わせて交換される。
【0029】
以下、本実施形態について詳細に説明する。
【0030】
支持体13の内部からタービンハウジング15を取り出すための取出穴13bが、前記対向位置の側に前記軸方向に開口するように支持体13に形成されている。支持体13は、取出穴13bを塞ぐ閉塞部材13dを有する。閉塞部材13dは、ボルト(図示せず)などにより支持体13の本体13cに取り外し可能に取り付けられる。図2の例では、この閉塞部材13dに排気口13aが形成される。また、図2の例では、タービンハウジング15は、例えば閉塞部材13dを前記軸方向に貫通するボルト18により、閉塞部材13dに取り付けられ、これにより、閉塞部材13dを介して支持体13に取り付けられる。
【0031】
支持体13は、補強部材27を介して軸受ハウジング11を支持する。補強部材27には、翼構造部8を通すための貫通穴(図示せず)が、その中央において図2の左右方向に貫通している。また、支持体13には、図2の右側から支持体13の内部に、翼構造部8を挿入するための挿入穴(図示せず)が、その中央において図2の右方向に開口している。また、補強部材27は、ボルトなどにより支持体13に結合されてもよいし、支持体13と一体成型されてもよい。図2の例では、押圧手段24により、軸受ハウジング11の被押付部11bを補強部材27に押し付ける。押圧手段24は、例えば油圧クランプであり、この場合、油圧クランプ24のクランプロッド24a(例えばスイング式クランプロッド)が、軸受ハウジング11の被押付部11bを補強部材27に前記軸方向に押し付けることで、軸受ハウジング11が補強部材27を介して支持体13に支持される。油圧室を内部に有する油圧クランプ24の本体24bは、支持体13に固定されてよい。このような、油圧クランプ24を、周方向に間隔をおいて複数設けてよい。図7は、図2のB−B矢視図であり、図7の破線で囲まれた範囲Rにおいて、補強部材27は、支持体13に前記軸方向に接触または結合している。
【0032】
把持ユニット19は、回転体3の一端部3aを把持する把持部19aと、該把持部19aが先端に結合された把持シャフト19bとを有する。
【0033】
把持部19aは、この例では、コレットチャック19aである。図8は、図2の破線Lbで囲んだ部分の拡大図であり、コレットチャック19aを示す。コレットチャック19aは、その周方向に隙間をおいて配置された複数のコレット爪29を有する。各コレット爪29は、軸方向(図8の左右方向)から傾いて配置されて、各コレット爪29は、先端部(図8の右端部)のほうが後端部(図8の左端部)よりもコレットチャック19aの中心軸Aに近接している。また、複数のコレット爪29は、後端部において一体的に結合されている。コレットチャック19aの後端部は把持シャフト19bの先端部(図8の右端部)に取り付けられ、これによりコレットチャック19aが把持シャフト19bに支持される。把持ユニット19は、円筒形の部材であるクランプ部材19cをさらに有する。クランプ部材19cは、コレットチャック19aおよび把持シャフト19bに嵌合している。また、クランプ部材19cは、軸方向に移動可能となっている。クランプ部材19cを、適宜の手段により、軸方向後方側(図8の左方向)に移動させることで、クランプ部材19cの内面が各コレット爪29をクランプ部材19cの半径方向内側に押圧する。これにより、各コレット爪29が前記半径方向内側に撓み、コレットチャック19aの内部空間に挿入されている回転体3の一端部3aを強固に把持する。
【0034】
把持ユニット19は、さらに、軸方向移動体19dと駆動部19eを備える。
【0035】
軸方向移動体19dは、交差方向移動体23aに設けられ交差方向移動体23aに対し軸方向に移動可能である。軸方向移動体19dは、把持ユニット19が前記対向位置にある状態(図2、図3の状態)で、回転体3の一端部3aを把持ユニット19が把持する前進位置(図9の状態)と、該前進位置から後退した後退位置(図2の状態)との間で前記軸方向に移動可能である。即ち、把持ユニット19が前記対向位置にある状態で、前記後退位置から軸方向移動体19dが前記前進位置まで前記軸方向に移動することで、図9のように、把持部19aが、排気口13aと排出流路15bを通して回転体3の一端部3aを把持する前記前進位置まで移動する。
【0036】
軸方向移動体19dは、駆動部19eに駆動されることで前記軸方向に往復動する。駆動部19eは、例えば、前記軸方向に伸縮するエアシリンダ装置と、該エアシリンダ装置に空圧を供給することでエアシリンダ装置を伸縮させる空圧供給装置とからなる。この場合、例えば、図2のように、該エアシリンダ装置のシリンダ19e1は、交差方向移動体23aに固定され、エアシリンダ装置のピストン先端19e2は軸方向移動体19dに固定される。
【0037】
軸方向移動体19dに関連して、把持ユニット19は、支持部材31、被押圧部材33、回転角調節装置35、および回転阻止機構37をさらに有する。
【0038】
2つの支持部材31が、図2のように、前記軸方向に間隔をおいて軸方向移動体19dに固定される。各支持部材31は、把持シャフト19bが回転できるように把持シャフト19bを支持する。そのために、例えば、各支持部材31には、把持シャフト19bが遊びをもって貫通する貫通孔が形成されている。
【0039】
2つの被押圧部材33は、把持シャフト19bに固定される。一方の被押圧部材33は、前記軸方向の一方側から一方の支持部材31に接触し、他方の被押圧部材33は、前記軸方向の他方側から他方の支持部材31に接触する。この構成で、軸方向移動体19dが前記軸方向に移動すると、軸方向移動体19dが支持部材31を介して被押圧部材33を前記軸方向に押圧することで、把持シャフト19bが軸方向移動体19dと共に前記軸方向に移動する。
【0040】
回転角調節装置35は、把持シャフト19bの回転角を調節する。回転角調節装置35は、軸方向移動体19dに設置され、軸方向移動体19dと共に前記軸方向に移動する。また、回転角調節装置35は、把持部19aが回転体3の一端部3aを把持した状態で、把持シャフト19bを回転させ、これにより、回転体3を回転させ、回転体3の回転角を調節する。図2の例では、回転角調節装置35は、サーボモータ35aと、サーボモータ35aの回転を減速してサーボモータ35aの回転駆動力を出力する減速機35bと、減速機35bの出力軸に固定されたギヤ35cと、このギヤ35cと噛み合い把持シャフト19bに固定された位置調整ギヤ35dと、を有する。
【0041】
回転阻止機構37は、加工具14aが回転体3の除去対象部17を除去加工している時に回転体3を把持した把持部19aが回転してしまわないように、把持シャフト19bをその周方向に固定する。例えば、回転阻止機構37は、把持シャフト19bに固定され把持シャフト19bから把持シャフト19bの半径方向に突出したフランジ部37aと、このフランジ部37aを軸方向に強固に挟み込むクランプ装置37bとを有するものであってよい。このクランプ装置37bは軸方向移動体19dに固定されるが、その固定位置が適宜の手段によって調節可能になっている。
【0042】
アンバランス計測修正装置20は、回転体3のアンバランス計測を行う。そのために、アンバランス計測修正装置20は、加速度センサ47、回転角センサ49、および演算器51を備える。
【0043】
加速度センサ47は、支持体13に取り付けられる。加速度センサ47は、回転体3が回転している状態で、支持体13の加速度(即ち、振動)を検出する。回転体3の回転は、上述したように、支持体13の外部からタービンハウジング15の案内流路15aに駆動ガスを供給することで行う。これにより、当該駆動ガスによりタービン翼7が回転駆動されて回転体3が回転する。
【0044】
この時、駆動部23bにより、排気流路形成体21は、前記対向位置に移動させられているので、タービン翼7を回転駆動した駆動ガスは、排出流路15bから排出穴13aを通して排気流路21aへ流入する。排気流路21aへ流入した駆動ガスは、排気流路21aの出口である開口部21cに接続されたダクト(図示せず)内に流入してよい。
また、排気流路形成体21が前記対向位置にある時に、排気流路形成体21と支持体13との間に隙間が存在するようになっている。これにより、排気流路形成体21が支持体13に接触しないようになっているので、加速度センサ47で支持体13の振動を計測する時に、排気流路形成体21が当該振動計測に影響を与えることがない。
なお、図4のように、排気流路形成体21における支持体13側の端面には、支持体13の構成材料(鉄等の金属)より柔らかいテフロン(登録商標)などの樹脂材料で形成された被膜21bを取り付けておくのがよい。これにより、排気流路形成体21を交差方向に移動させる時に、万一、被膜21bが支持体13に接触しても、支持体13が損傷しない。また、前記対向位置にある時に、排気流路形成体21が被膜21bを介して支持体13に接触するようにした場合に、被膜21bが柔らかいので、被膜21bにより、この接触による振動計測への影響を抑制しつつ、駆動ガスをシールすることができる。
【0045】
回転角センサ49は、回転体3の回転角を検出する。この回転角は、回転体3が1回転することでゼロ度〜360度まで変化する。回転角センサ49は、回転体3のコンプレッサ翼9側端部付近に設けられるが、不使用時には、図示しない装置により、後述の加工具14aと干渉しない位置に移動させられる。
【0046】
演算器51は、加速度センサ47が検出した前記加速度と回転角センサ49が検出した前記回転角との関係を表す振動データを生成し、さらに、この振動データから、影響係数を用いて回転体3のアンバランスデータを算出する。アンバランスデータは、回転体3においてアンバランスが存在する周方向位置と、当該アンバランスの大きさとからなる。なお、影響係数は、予め取得しておく。影響係数は、例えば、回転体3に試し錘を取り付けること等により回転体3にバランス変化を与え、このバランス変化による振動データ(前記と同様の振動データ)の変化に基づいて算出される。
【0047】
アンバランス計測修正装置20は、回転体3の除去加工を行う切削装置14を備える。切削装置14は、回転体3の他端部(この例では、コンプレッサ翼9側の端部)にある除去対象部17の一部を除去加工する加工具14a(例えば、エンドミル)と、該加工具14aが取り付けられる可動部14bと、該可動部14bを移動させる切削制御部14cと、を有する。この切削制御部14cは、サーボモータを用いて、例えば可動部14bを軸方向、2軸方向(軸方向、および該軸方向と直交する水平方向)または3軸方向(軸方向、軸方向に直交する水平方向、および鉛直方向)に移動させる制御装置である。
【0048】
切削制御部14cは、アンバランスデータに基づいて加工具14aを移動させる。即ち、切削制御部14cは、回転体3においてアンバランスが存在する周方向位置において、当該アンバランスの大きさ(=r×m、ここでrは回転体3の中心軸Cからの距離であり、mは質量である)だけ加工具14aが回転体3を切削するように可動部14bを軸方向に移動させる制御を行う。
【0049】
上述のアンバランス計測修正装置20による除去加工の手順について説明する。まず、上述のように、把持ユニット19が前記対向位置にある状態で、軸方向移動体19dを、把持ユニット19が回転体3の一端部3aを把持する前記前進位置に移動させる。次いで、把持ユニット19の把持部19aが回転体3の一端部3aを把持する。その後、回転阻止機構37により、上述のように、把持シャフト19bを回転しないように固定する。次に、上述のアンバランスデータに基づいて、切削制御部14cが、加工具14を、回転体3においてアンバランスが存在する周方向位置に位置決めし、この状態で、加工具14を、除去対象部17に向けて軸方向に移動させ、これにより、当該アンバランスの大きさ(=r×m、ここでrは回転体3の軸心からの距離であり、mは質量である)だけ除去対象部17を切削する。なお、切削する直前に、回転角調節装置35により、上述のように把持シャフト19bを回転させ、回転体3の回転角を調節してよい。
【0050】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変形例1〜3を、任意に組み合わせて、または単独で採用してもよい。この場合、以下で説明しない点は、上述と同じであってもよいし、適宜変更してもよい。
【0051】
(変形例1)
回転機械5は、過給機でなくてもよく、翼構造部8を有する回転体3を備えるものであればよい。
【0052】
(変形例2)
本発明では、回転体3のアンバランスを除去するために、除去加工により回転体3の一部を除去するが、除去加工は、切削以外の他の加工(例えばレーザ加工)であってもよい。レーザ加工では、回転体3の一部を溶融して除去する。
【0053】
(変形例3)
上述では、除去加工は、軸方向に行われたが、半径方向に除去加工してもよい。
【符号の説明】
【0054】
3 回転体、3a 一端部、5 回転機械、7 回転翼(タービン翼)、8 翼構造部、9 コンプレッサ翼、10 回転体把持装置、11 軸受ハウジング、11a ラジアル軸受部、11b 被押付部,12 回転シャフト、13 支持体、13a 排出穴、13b 取出穴、13c 支持体の本体、13d 閉塞部材、14 切削装置、14a 加工具、14b 可動部、14c 切削制御部、15 タービンハウジング、15a 案内流路、15b 排出流路、16 ボルト、17 除去対象部、18 ボルト、19 把持ユニット、19a 把持部(コレットチャック)、19b 把持シャフト、19c クランプ部材、19d 軸方向移動体、19e 駆動部、19e1 シリンダ、19e2 ピストン先端、20 アンバランス計測修正装置、21 排気流路形成体、21a 排気流路、21b 被膜、21c 開口部、23 駆動装置、23a 交差方向移動体、23b 駆動部、23b1 シリンダ、23b2 ピストン先端、24 押圧手段、24a クランプロッド、24b 油圧クランプの本体、27 補強部材、29 コレット爪、31 支持部材、33 被押圧部材、35 回転角調節装置、37 回転阻止機構、37a フランジ部、37b クランプ装置、47 加速度センサ、49 回転角センサ、51 演算器
【特許請求の範囲】
【請求項1】
回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置であって、
前記回転体は、駆動ガスにより回転駆動される回転翼が設けられた翼構造部を有し、該翼構造部はハウジングに収容されており、該ハウジングには、駆動ガスを前記回転翼に案内する案内流路と、前記回転翼を駆動した駆動ガスを回転体の軸方向に外部へ排出する排出流路とが形成されており、
前記除去加工の時に、翼構造部を把持する把持ユニットと、
回転体のアンバランスを計測するために回転体を回転させている時に、前記排出流路から排出される駆動ガスを流す排気流路を有する排気流路形成体と、
把持ユニットと排気流路形成体を、互いに排他的に、翼構造部に軸方向に対向する対向位置へ移動させる駆動装置と、を備え、
前記駆動装置は、把持ユニットを前記対向位置に移動させることで、把持ユニットが翼構造部を把持可能となり、前記排気流路形成体を前記対向位置に移動させることで、前記排気流路内に、前記排出流路からの駆動ガスが軸方向に流入するようになっている、ことを特徴とする回転体把持装置。
【請求項2】
前記駆動装置は、把持装置と排気流路形成体のいずれも前記対向位置以外の位置へ移動させることで、前記対向位置に空間を確保する、ことを特徴とする請求項1に記載の回転体把持装置。
【請求項1】
回転機械の回転体に存在するアンバランスを修正するために該回転体を部分的に除去加工する時に、回転体が回転しないように回転体を把持する回転体把持装置であって、
前記回転体は、駆動ガスにより回転駆動される回転翼が設けられた翼構造部を有し、該翼構造部はハウジングに収容されており、該ハウジングには、駆動ガスを前記回転翼に案内する案内流路と、前記回転翼を駆動した駆動ガスを回転体の軸方向に外部へ排出する排出流路とが形成されており、
前記除去加工の時に、翼構造部を把持する把持ユニットと、
回転体のアンバランスを計測するために回転体を回転させている時に、前記排出流路から排出される駆動ガスを流す排気流路を有する排気流路形成体と、
把持ユニットと排気流路形成体を、互いに排他的に、翼構造部に軸方向に対向する対向位置へ移動させる駆動装置と、を備え、
前記駆動装置は、把持ユニットを前記対向位置に移動させることで、把持ユニットが翼構造部を把持可能となり、前記排気流路形成体を前記対向位置に移動させることで、前記排気流路内に、前記排出流路からの駆動ガスが軸方向に流入するようになっている、ことを特徴とする回転体把持装置。
【請求項2】
前記駆動装置は、把持装置と排気流路形成体のいずれも前記対向位置以外の位置へ移動させることで、前記対向位置に空間を確保する、ことを特徴とする請求項1に記載の回転体把持装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−13597(P2012−13597A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−151689(P2010−151689)
【出願日】平成22年7月2日(2010.7.2)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年7月2日(2010.7.2)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]