
回転制御装置、回転制御方法及び回転制御用プログラム
【課題】記録トラック等が何ら存在しない光ディスクのレーベル面等に対する情報の記録を行う際に、より高精度に当該光ディスクの回転を制御することが可能な回転制御装置を提供する。
【解決手段】光ディスクDKの回転を制御する回転制御装置SRにおいて、スピンドルモータ1に直結されたパルス生成部2と、パルス生成部2からのパルス信号Sfgにおける各パルスに基づいて回転エラーを示す速度エラー信号Serd及び第1位相エラー信号Ser1を生成する速度/位相比較部5と、各パルスのうち、光ディスクDKの一回転が終了するタイミングに夫々相当する当該パルスに基づいて回転エラーを示す第2位相エラー信号Ser2を生成する位相比較部8と、生成された速度エラー信号Serd、第1位相エラー信号Ser1及び第2エラー信号Ser2に基づいて、光ディスクDKの回転を制御するドライバ10と、を備える。
【解決手段】光ディスクDKの回転を制御する回転制御装置SRにおいて、スピンドルモータ1に直結されたパルス生成部2と、パルス生成部2からのパルス信号Sfgにおける各パルスに基づいて回転エラーを示す速度エラー信号Serd及び第1位相エラー信号Ser1を生成する速度/位相比較部5と、各パルスのうち、光ディスクDKの一回転が終了するタイミングに夫々相当する当該パルスに基づいて回転エラーを示す第2位相エラー信号Ser2を生成する位相比較部8と、生成された速度エラー信号Serd、第1位相エラー信号Ser1及び第2エラー信号Ser2に基づいて、光ディスクDKの回転を制御するドライバ10と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、回転制御装置、回転制御方法及び回転制御用プログラムの技術分野に属し、より詳細には、例えば光ディスク等の円盤の回転を制御する回転制御装置及び回転制御方法並びに当該回転制御に用いられるプログラムの技術分野に属する。
【背景技術】
【0002】
光ビームを用いて光学的に情報が記録又は再生される光ディスクの分野において、近年、当該光ディスクにおいて当該情報記録再生用の光ビームが照射される面(以下、当該面を情報記録面と称する)とは反対の面(以下、当該面をレーベル面と称する)に、上記光ビームを用いて視認可能な文字や図形等を描画する技術が開発されている。
【0003】
この技術においては、当該レーベル面における同一の半径位置一周分に対して照射する光ビームの強度を、当該レーベル面に描画すべき当該図形等の形に応じて変えることで、その位置における可視光の反射率を変え、これにより上記文字や図形等を階調変化により視認可能に描画する。これに加えて更に、当該強度変更の制御を上記一周分に対して複数回(複数周回分)行うことで、上記図形等としてのより高いコントラストを実現することが可能となっている。
【0004】
一方、上記情報記録面に対して情報を光学的に記録する場合、従来では、元々当該情報記録面に形成されている記録トラックに対して当該情報記録用の光ビームを照射し、その反射光に含まれているアドレス情報やいわゆるウォブリング情報に基づいて当該情報の記録位置を制御したり光ディスク自体の回転速度又は回転数を制御する構成となっていた。
【0005】
しかしながら、上記レーベル面については、言うまでも無く上記記録トラックは形成されていないため、特に上記回転速度又は回転数の制御に当たっては、その回転対象である光ディスクから得られる情報を用いることなく行わざるを得ない状況となる。
【0006】
この点、従来では、当該光ディスクを回転させるいわゆるスピンドルモータから得られるパルス信号における各パルスのタイミングを基準として当該光ディスクの回転を制御する構成とされている。そして、このような構成において、その回転制御の精度を上げるための構成としては、例えば下記特許文献1に例示されるものがある。
【特許文献1】特開2005−317150
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に記載されている技術では、上記スピンドルモータからその回転に対して高精度で同期した信号が出力されてくることが前提となっているが、当該同期した信号の精度は、部品コスト等の観点から余り高くない場合が一般的であり、上記特許文献1記載の技術は、実際には現実的であるとは言い難い。
【0008】
このような事情から、記録トラック等が何ら存在しない光ディスクを回転させるスピンドルモータの回転に対して高精度で同期した信号が得られなくとも、当該光ディスクの回転を高精度で制御しうる回転制御装置が求められている。
【0009】
そこで、本願は、上記の事情に鑑みて為されたもので、その課題の一例は、記録トラック等が何ら存在しない光ディスクのレーベル面等に対する情報の記録を行う際に、当該光ディスクを回転させるスピンドルモータの回転に対して高精度で同期した信号が得られなくとも、より高精度に当該光ディスクの回転を制御することが可能な回転制御装置及び回転制御方法並びに当該回転制御に用いられるプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、光ディスク等の円盤の回転を制御する回転制御装置において、前記回転の状況に対応したパルス信号を生成するパルス生成部等のパルス生成手段と、前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する速度/位相比較部等の第1エラー信号生成手段と、各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する位相比較部等の第2エラー信号生成手段と、前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御するドライバ等の制御手段と、を備える。
【0011】
上記の課題を解決するために、請求項7に記載の発明は、光ディスク等の円盤の回転を制御する回転制御方法において、前記回転の状況に対応したパルス信号を生成するパルス生成工程と、前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成工程と、各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成工程と、前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御工程と、を含んで構成される。
【0012】
上記の課題を解決するために、請求項8に記載の発明は、請求項1から6のいずれか一項に記載の回転制御装置であって前記パルス生成手段を備える回転制御装置に含まれるコンピュータを、前記第1エラー生成手段、前記第2エラー生成手段、及び、前記制御手段、として機能させる。
【発明を実施するための最良の形態】
【0013】
次に、本願を実施するための最良の形態について、図面に基づいて説明する。なお、以下に説明する実施形態は、円盤としての光ディスクを回転させ、当該光ディスクの上記レーベル面に対して視認可能な図形を描画する描画装置に含まれ、当該光ディスクの回転状態を制御する回転制御装置に対して本願を適用した場合の実施の形態である。
【0014】
(I)第1実施形態
始めに、本願に係る第1実施形態について、図1乃至図3を用いて説明する。
【0015】
なお、図1は第1実施形態に係る回転制御装置の概要構成を示すブロック図であり、図2は当該回転制御装置の動作を示すタイミングチャートであり、図3は当該回転制御装置の動作を示すフローチャートである。このとき、図1は、上記描画装置の内、第1実施形態に係る回転制御装置として機能する部分のみを抽出して示すブロック図である。
【0016】
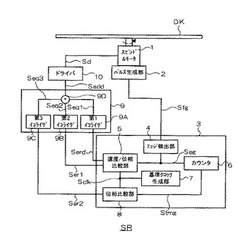
図1に示すように、第1実施形態に係る回転制御装置SRは、光ディスクDKが固定されているスピンドルモータ1と、当該スピンドルモータ1に内蔵されている図示しない複数のホール素子の出力信号が入力されるように構成されているパルス生成手段としてのパルス生成部2と、エラー信号生成部3と、波形調整部9と、制御手段としてのドライバ10と、により構成されている。
【0017】
また、上記エラー信号生成部3は、エッジ検出部4と、第1エラー信号生成手段としての速度/位相比較部5と、カウンタ6と、基準クロック生成部7と、第2エラー信号生成手段としての位相比較部8と、により構成されている。
【0018】
更に、振幅調整部9は、第1イコライザ9Aと、第2イコライザ9Bと、第3イコライザ9Cと、加算器9Dと、により構成されている。
【0019】
この構成において、スピンドルモータ1は、ドライバ10からの駆動信号Sdに基づき、予め設定された回転数で光ディスクDKを回転させる。
【0020】
そして、パルス生成部2は、いわゆるFG(Frequency Generator)として機能するものであり、上記複数のホール素子夫々からの上記出力信号に基づいて当該光ディスクの回転速度に相当する周波数を有するパルスを生成し、パルス信号Sfgとしてエラー信号生成部3に出力する。ここで、当該パルス信号Sfgは、具体的には例えば、光ディスクDK一回転につき三つのパルスを含むパルス信号Sfgである。
【0021】
次に、エラー信号生成部3は、当該パルス信号Sfgに基づき、当該パルス信号Sfgに含まれる全パルスを夫々用いて光ディスクDKの回転状態に対応する速度エラー信号Serd及び位相エラー信号(以下、当該位相エラー信号を第1位相エラー信号Ser1とする)を従来と同様の方法により生成して振幅調整部9に出力する。これに加えてエラー信号生成部3は、当該全パルスのうち、光ディスクDKの一回転が終了するたびに出力されてくるパルスのみを用いて、当該回転状態に対応する他の位相エラー信号(以下、当該他の位相エラー信号を第2位相エラー信号Ser2とする)を生成して振幅調整部9に出力する。
【0022】
これらにより、振幅調整部9内の第1イコライザ9Aは、上記速度エラー信号Serdの振幅のみを、予め設定された値に調整して第1イコライザ信号Seq1を生成し、加算器9Dに出力する。また、振幅調整部9内の第2イコライザ9Bは、上記第1位相エラー信号Ser1の振幅のみを、予め設定された値に調整して第2イコライザ信号Seq2を生成し、加算器9Dに出力する。更に、振幅調整部9内の第3イコライザ9Cは、上記第2位相エラー信号Ser2の振幅のみを、予め設定された値に調整して第3イコライザ信号Seq3を生成し、加算器9Dに出力する。
【0023】
ここで、当該各イコライザにおける振幅の調整は、例えば、速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2夫々に対して、予め実験的に設定された値を乗算することにより実行される。このとき、速度エラー信号Serdに対する乗算値をAとし、第1位相エラー信号Ser1に対する乗算値をBとし、第2位相エラー信号Ser2に対する乗算値をCとしたとき、夫々の乗算値間の関係としては、例えば、A>C>B(例えばA:C:B=32:10:1)となるように設定することが好ましい。
【0024】
次に、加算器9Dは、上記第1イコライザ信号Seq1、第2イコライザ信号Seq2及び第3イコライザ信号Seq3について、同じタイミングの当該各イコライザ信号同士を加算し、加算信号Saddを生成してドライバ10に出力する。
【0025】
これにより、ドライバ10は、当該加算信号Saddにより示される回転エラー(回転速度の誤差や回転ムラ等)を補償するようにいわゆる帰還制御を実行しつつ、スピンドルモータ1を回転させるための上記駆動信号Sdを生成して当該スピンドルモータ1に出力する。
【0026】
次に、上記エラー信号生成部3における動作に詳細について、図1及び図2を用いて説明する。なお、以下の説明では、光ディスクDK一回転(換言すれば、スピンドルモータ一回転)につき、上記パルス生成部2から三つのパルスを含む上記パルス信号Sfgが出力される回転速度が、当該光ディスクDKとしての正規の(換言すればその値に回転制御されるべき)回転速度であるものとする。
【0027】
上述したように、エラー信号生成部3は、エッジ検出部4、速度/位相比較部5、カウンタ6、基準クロック生成部7及び位相比較部8により構成されているが、このうち、エッジ検出部4は、パルス信号Sfgに含まれている各パルスにおける立ち上がりエッジ又は立下りエッジのいずれか一方のみのタイミングを、エッジ信号Segに含まれる全てのパルスにおける当該いずれか一方のエッジ毎に検出し、エッジ信号Segとしてカウンタ6及び速度/位相比較部5に出力する。
【0028】
ここで、以下の説明では、パルス信号Sfgに含まれている各パルスにおける立ち上がりエッジのみのタイミングを当該エッジ毎に検出したものをエッジ信号Segとして出力するものとする。
【0029】
一方、基準クロック生成部7は、スピンドルモータ1が回転すべき本来の回転速度として予め設定されている回転速度に相当する周波数を有するクロック信号Sclkを生成し、速度/位相比較部5及び位相比較部8に出力する。
【0030】
これらにより、速度/位相比較部5は、従来におけるパルス信号Sfgを用いた回転制御の場合と同様に、上記クロック信号Sclkにより示されるタイミングと、エッジ信号Segにより示されるパルス毎のタイミングとを比較し、その誤差を上記速度エラー信号Serd及び第1位相エラー信号Ser1として振幅調整部9に出力する。
【0031】
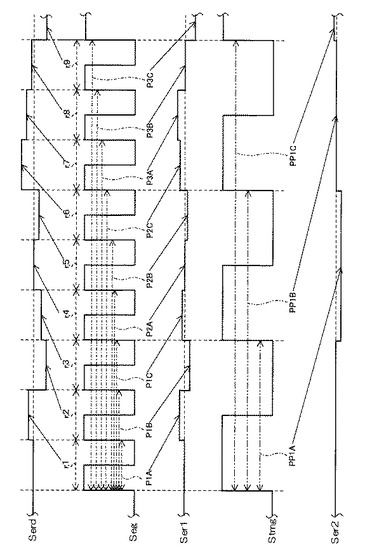
より具体的には、図2最上段及び上から二段目に例示するように、上記エッジ信号Segにおける各立ち上がりエッジの間隔を夫々r1、r2、r3、r4、…、として連続的に検出し、当該検出された夫々の間隔と、上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、エッジ信号Segの一波長分遅れたタイミングにおける速度エラー信号Serdの振幅に相当するように当該速度エラー信号Serdを生成して、上記振幅調整部9に出力する。
【0032】
これと並行して、速度/位相比較部5は、図2上から二段目及び三段目に例示するように、上記エッジ信号Segにおける各立ち上がりエッジの間隔を、当該エッジ信号Segの一波長分以上複数波長分に渡ってP1A、P1B、P1C、P2A、P2B、P2C、…、として夫々別個に且つ連続的に検出することを光ディスクDKの複数回転について行い、、当該検出された夫々の間隔P1A、P1B、P1C、…、と、夫々の間隔に対応して上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、当該各間隔毎に当該誤差が検出されるタイミングに対応したタイミングにおける第1位相エラー信号Ser1の振幅に相当するように当該第1位相エラー信号Ser1を生成して、上記振幅調整部9に出力する。
【0033】
他方、本願に係るカウンタ6は、上記エッジ信号Segにおける光ディスクDK一回転の長さ相当する波長を有するタイミング信号Stmg(図2下から二段目参照)を生成し、位相比較部8に出力する。
【0034】
これにより、本願に係る位相比較部8は、上記クロック信号Sclkにより示されるタイミングと、タイミング信号Stmgにより示されるタイミングとを比較し、その誤差を上記第2位相エラー信号Ser2として振幅調整部9に出力する。
【0035】
より具体的には、図2上から最下段及び下から二段目に例示するように、上記タイミング信号Stmgにおける各立ち上がりエッジの間隔を、当該タイミング信号Stmgの一波長分、二波長分、三波長分、…(換言すれば、光ディスクDKの一回転分、二回転分、三回転分、…)について、PP1A、PP1B、PP1C、…、として夫々別個に且つ連続的に検出し、当該検出された夫々の間隔と、夫々の間隔に対応して上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、当該各間隔毎に当該誤差が検出されるタイミングに対応したタイミングにおける第2位相エラー信号Ser2の振幅に相当するように当該第2位相エラー信号Ser2を生成して、上記振幅調整部9に出力する。
【0036】
次に、上述した構成を備える回転制御装置SRにおける回転制御動作につき、全体を通して図3を用いて説明する。
【0037】
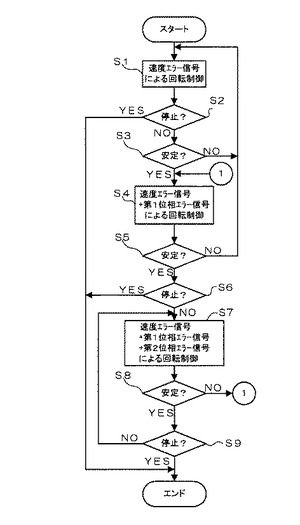
図3に示すように、第1実施形態に係る回転制御動作では、通常は上記速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみをドライバ10に出力することで、スピンドルモータ1の回転制御を行う(ステップS1)。より具体的には、通常は、上記第1位相エラー信号Ser1及び第2位相エラー信号Ser2の出力は速度エラー信号Serdと共に継続してはいるものの、上記第2イコライザ信号Seq2及び上記第3イコライザ信号Seq3については、夫々第2イコライザ9B及び第3イコライザ9Cからの出力が停止(ミュート)されている。
【0038】
そして、当該速度エラー信号Serdを用いた回転制御中においては、光ディスクDKの回転を停止させるか否かを確認し(ステップS2)、停止させるときは(ステップS2;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0039】
他方、ステップS2の判定において、光ディスクDKの回転制御を継続するときは(ステップS2;NO)、次に、何らかの原因によりその回転速度又は回転数が不安定になったか否か(より具体的には、例えば光ディスクDKのレーベル面に対する描画精度が維持できなくなったか否か)を監視し(ステップS3)、当該不安定になったときは(ステップS3;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御によりその不安定化の回復に努める。
【0040】
一方、ステップS3の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS3;YES)、更なる安定化及び精度の向上を図るべく、第2イコライザ9Bから上記第2イコライザ信号Seq2の出力を開始し、速度エラー信号Serdに基づく上記第1イコライザ信号Seq1と共に光ディスクDKの回転制御に供させる(ステップS4)。
【0041】
次に、当該速度エラー信号Serd及び第1位相エラー信号Ser1を共に用いた回転制御中においては、上記ステップS2の処理と同様に何らかの原因によりその回転速度又は回転数が不安定になったか否かを監視し(ステップS5)、当該不安定になったときは(ステップS5;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御から再開してその不安定化の回復に努める。
【0042】
一方、ステップS5の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS5;YES)、次に光ディスクDKの回転を停止させるか否かを確認し(ステップS6)、停止させるときは(ステップS6;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0043】
他方、ステップS6の判定において、光ディスクDKの回転制御を継続するときは(ステップS6;NO)、更なる安定化及び精度の向上を図るべく、第3イコライザ9Cから上記第3イコライザ信号Seq3の出力を開始し、第1位相エラー信号Ser1に基づく上記第2イコライザ信号Seq2及び速度エラー信号Serdに基づく上記第1イコライザ信号Ser1と共に光ディスクDKの回転制御に供させる(ステップS7)。
【0044】
最後に、当該速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2を全て用いた回転制御中においては、上記ステップS2又はS5の処理と同様に何らかの原因により更に回転速度又は回転数が不安定になったか否かを監視し(ステップS8)、当該不安定になったときは(ステップS8;NO)、上記ステップS4に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1及び第1位相エラー信号Ser1から生成された第2イコライザ信号Seq2を用いた回転制御から再開してその不安定化の回復に努める。
【0045】
一方、ステップS8の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS8;YES)、次に光ディスクDKの回転を停止させるか否かを確認し(ステップS9)、停止させるときは(ステップS9;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0046】
他方、ステップS9の判定において、光ディスクDKの回転制御を継続するときは(ステップS9;NO)、現状の安定度及び回転精度を維持すべく上記ステップS7に戻り、速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2を全て用いた回転制御を継続する。
【0047】
以上説明したように、第1実施形態に係る回転制御装置SRの動作によれば、光ディスクDKの回転に応じて生成されるパルス信号Sfgにおける各パルスに対応する速度エラー信号Serd及び第1位相エラー信号Ser1と、一回の回転に夫々相当するパルスに対応する第2位相エラー信号Ser2と、を共に用いて光ディスクDKの回転を制御するので、速度エラー信号Serd及び第1位相エラー信号Ser1のみに基づいて当該回転を制御する場合に比してより長い間隔のパルスに基づく精度の高い第2位相エラー信号Ser2を用いることで、より正確に当該回転における回転速度又は回転数を制御することができる。
【0048】
また、一つのパルスに相当するタイミングから起算して一又は複数回転が終了するタイミングに夫々相当する第2位相エラー信号Ser2が回転制御に用いられるので、光ディスクDKの回転が繰り返されることにより累積される回転エラーをも考慮して正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0049】
更に、速度エラー信号Serd及び第1位相エラー信号Ser1と、第2位相エラー信号Ser2と、を共に回転制御に用いるので、速度エラー信号Serd及び二種類の位相エラー信号Serを用いてより正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0050】
更にまた、信服調整部9により、第2位相エラー信号Ser2の振幅を第1位相エラー信号Ser1の振幅よりも大きくなるように変換して双方を加算し、回転の制御に用いるので、回転ムラの影響を受け易い第1位相エラー信号Ser1の影響を低減しつつ正確に光ディスクDKの回転を制御することができる。
【0051】
また、速度エラー信号Serdが常時回転の制御に用いられると共に、第1位相エラー信号Ser1及び第2位相エラー信号Ser2については当該第1位相エラー信号Ser1を回転の制御に用い始めるタイミングを第2位相エラー信号Ser2のそれよりも早めて当該回転の制御を行うので、回転制御の正確性を維持することができる。
【0052】
なお、図3に示すステップS8の判定において、回転速度又は回転数が不安定になったとき(ステップS8;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御から再開してその不安定化の回復に努めるように構成することもできる。
【0053】
(II)第2実施形態
次に、本願に係る他の実施形態である第2実施形態について、図4及び図5を用いて説明する。
【0054】
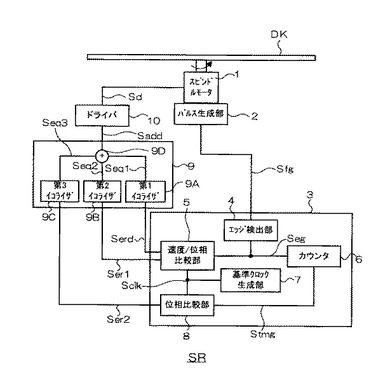
なお、図4は第2実施形態に係る回転制御装置の概要構成を示すブロック図であり、図5は当該回転制御装置の動作を示すタイミングチャートである。また、図4及び図5において、上記第1実施形態における図1及び図2と同様の構成部材については、同一の部材番号又は符号を付して細部の説明は省略する。
【0055】
上述した第1実施形態においては、その図2において例示したように、パルス信号Sfgに含まれる全パルスのうち、光ディスクDK一回転分内の三つのパルスのいずれか一つのタイミングを起算点として第2位相エラー信号Ser2を生成する場合について説明したが、以下に説明する第2実施形態では、パルス信号Sfgに含まれる全パルスのうち、光ディスクDK一回転分内の三つのパルス全てのタイミングを夫々に起算点として、第2位相エラー信号(以下、第2実施形態に係る第2位相エラー信号を、第2位相エラー信号Sr2とする)を生成して光ディスクDKの回転制御に用いる。
【0056】
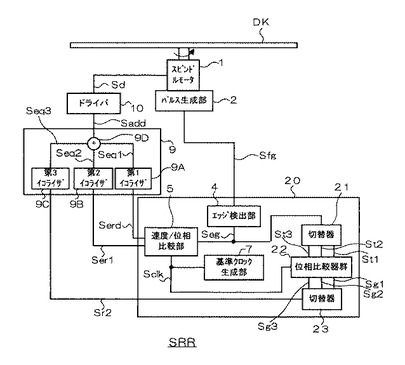
図4に示すように、第2実施形態に係る回転制御装置SRRは、第1実施形態に係る回転制御SRを構成するものと同様の構成及び機能を備えるスピンドルモータ1、パルス生成部2、波形調整部9及びドライバ10に加えて、第2実施形態としての独自の構成を備えるエラー信号生成部20により構成されている。
【0057】
そして、当該エラー信号生成部20は、第1実施形態に係るエラー信号生成部3を構成するものと同様の構成及び機能を備えるエッジ検出部4、速度/位相比較部5及び基準クロック生成部7に加えて、切替器21及び23と、位相比較器群22と、により構成されている。
【0058】
そして更に、位相比較器群22は、光ディスクDK一回転の相当する上記パルス信号Sfgのパルス数(第1及び第2実施形態の場合において三つ)と同数の位相比較器を備えている。
【0059】
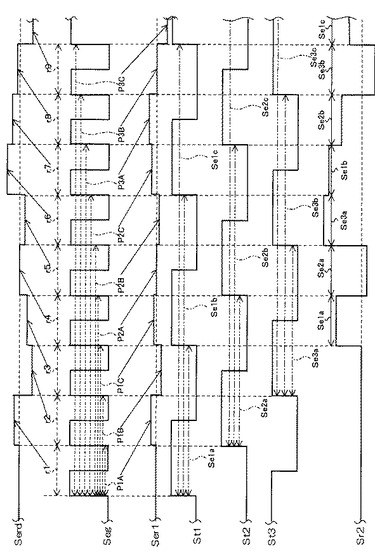
この構成において、切替器21は、エッジ信号Segに含まれる全パルスのうち、光ディスクDK一回転に必要な時間に相当する三つのパルス夫々の立ち上がりタイミングを夫々の立ち上がりタイミングとし且つ当該一回転と等しい波長を有するタイミング信号St1乃至St3(図5上から四段目乃至下から二段目参照)を生成し、夫々別個に位相比較器群22内の各位相比較器に出力する。
【0060】
これにより、当該各位相比較器は、上記クロック信号Sclkにより示されるタイミングと、各タイミング信号St1乃至St3により示されるタイミングとを夫々別個に比較し、その誤差を夫々誤差信号Sg1乃至Sg3として切替器23に出力する。
【0061】
そして、切替器23は、各誤差信号Sg1乃至Sg3夫々により示されているタイミング誤差を振幅とする第2位相エラー信号Sr2を生成し、上記信服調整部9内の第3イコライザ9Cに出力する。
【0062】
より具体的には、先ず上から図5二段目並びに四段目乃至六段目に例示するように、上記エッジ信号Segにおいて光ディスクDK一回転に相当する三つのパルスの立ち上がりタイミングを夫々の立ち上がりタイミングとし且つ光ディスクDK一回転の長さを夫々の一波長の長さとする上記三つのタイミング信号St1乃至St3が切替器21において生成され、夫々別個に位相比較器群22内の各位相比較器に出力される。
【0063】
そして、図5上から四段目及び最下段に例示するように、当該位相比較器群内の図示しない第1位相比較器及び切替器23は、タイミング信号St1における一波長分、二波長分及び三波長分(換言すれば、光ディスクDKの一回転分、二回転分及び三回転分)の時間を夫々Se1a、Se1b及びSe1cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St1において上記時間Se1a、Se1b及びSe1cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0064】
これと並行して、当該位相比較器群内の図示しない第2位相比較器及び切替器23は、図5上から五段目及び最下段に例示するように、タイミング信号St2における一波長分、二波長分及び三波長分の時間を夫々Se2a、Se2b及びSe2cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St2において上記時間Se2a、Se2b及びSe2cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0065】
更に、当該位相比較器群内の図示しない第3位相比較器及び切替器23は、図5上から六段目及び最下段に例示するように、タイミング信号St3における一波長分、二波長分及び三波長分の時間を夫々Se3a、Se3b及びSe3cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St3において上記時間Se3a、Se3b及びSe3cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0066】
その後は、第1実施形態に係る回転制御装置SRのものと同様の速度エラー信号Serd及び第1位相エラー信号Ser1に加えて上記第2位相エラー信号Sr2を用いて、第1実施形態において図3を用いて説明した場合と同様の動作を行って第2実施形態に係る回転制御動作を実行する。
【0067】
以上説明したように、第2実施形態に係る回転制御装置SRRの動作によれば、光ディスクDKの回転に応じて生成されるパルス信号Sfgにおける各パルスに対応する速度エラー信号Serd及び第1位相エラー信号Ser1と、一回の回転に夫々相当するパルスに対応する第2位相エラー信号Sr2と、を共に用いて光ディスクDKの回転を制御するので、速度エラー信号Serd及び第1位相エラー信号Ser1のみに基づいて当該回転を制御する場合に比してより長い間隔のパルスに基づく第2位相エラー信号Sr2を用いることで、より正確に当該回転における回転速度又は回転数を制御することができる。
【0068】
また、光ディスクDKの一回転中に生成される全てのパルスに相当する各タイミングから夫々起算して一又は複数の回転が夫々終了する各タイミングに夫々相当する第2エラー信号Sr2が回転制御に用いられるので、光ディスクDKの回転が繰り返されることにより累積される回転エラーをも考慮して正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0069】
更に、速度エラー信号Serd及び第1位相エラー信号Ser1と、第2位相エラー信号Sr2と、を共に回転制御に用いるので、速度エラー信号Serd及び二種類の位相エラー信号を用いてより正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0070】
更にまた、信服調整部9により、第2位相エラー信号Sr2の振幅を第1位相エラー信号Ser1の振幅よりも大きくなるように変換して双方を加算し、回転の制御に用いるので、回転ムラの影響を受け易い第1位相エラー信号Ser1の影響を低減しつつ正確に光ディスクDKの回転を制御することができる。
【0071】
また、速度エラー信号Serdが常時回転の制御に用いられると共に、第1位相エラー信号Ser1及び第2位相エラー信号Sr2については当該第1位相エラー信号Ser1を回転の制御に用い始めるタイミングを第2位相エラー信号Sr2のそれよりも早めて当該回転の制御を行うので、回転制御の正確性を維持することができる。
【0072】
なお、上述した第2実施形態においては、パルス信号Sfgのパルスのうち、光ディスクDK一回転に相当する三つのパルスを全て起算点として用いたが、当該一回転に相当するパルス数が多数に上る場合は、その一部(例えば半数や三分の一の数)のパルス夫々を起算点として上記第2位相エラー信号Sr2を生成するように構成することもできる。この場合、当該第2位相エラー信号Sr2としての均質性を考慮するならば、当該起算点とするパルスを当該一回転に相当するパルスの中から等間隔に選ぶのが好ましい。
【0073】
また、上述した各実施形態では、各エラー信号の活用順序としては、図3に示す如く、
速度エラー信号Serd→速度エラー信号Serd+第1位相エラー信号Ser1→速度エラー信号Serd+第1位相エラー信号Ser1+第2位相エラー信号Ser2(Sr2)
と言う態様を用いたが、これ以外に、上記第1位相エラー信号Ser1を用いずに、速度エラー信号Serdと第2位相エラー信号Ser2(Sr2)のみを、
速度エラー信号Serd→速度エラー信号Serd+第2位相エラー信号Ser2(Sr2)
と言う態様で活用してもよい。
【0074】
更に、上述した各実施形態は、光ディスクDKのレーベル面に対して視認可能な画像を描画する描画装置における当該光ディスクDKの回転制御に対して本願を適用した場合について説明したが、これ以外に、光ディスクDKから何ら情報を得られず且つ上記パルス信号Sfgの如きスピンドルモータ1の回転に対して高精度で同期した信号が得られない場合でも高精度で円盤の回転を制御しなければならない場合に、本願を広く適用することが可能である。
【0075】
更にまた、図2及び図3又は図5に示すフローチャート及びタイミングチャートに対応するプログラムを、フレキシブルディスク又はハードディスク等の情報記録媒体に記録しておき、又はインターネット等を介して取得して記録しておき、これらを汎用のコンピュータで読み出して実行することにより、当該コンピュータを各実施形態に係る回転制御装置SR又はSRRとして活用することも可能である。
【図面の簡単な説明】
【0076】
【図1】第1実施形態に係る回転制御装置の概要構成を示すブロック図である。
【図2】第1実施形態に係る回転制御装置の動作を示すタイミングチャートである。
【図3】第1実施形態に係る回転制御装置の動作を示すフローチャートである。
【図4】第2実施形態に係る回転制御装置の概要構成を示すブロック図である。
【図5】第2実施形態に係る回転制御装置の動作を示すタイミングチャートである。
【符号の説明】
【0077】
1 スピンドルモータ
2 パルス生成部
3、20 エラー信号生成部
4 エッジ検出部
5 速度/位相比較部
6 カウンタ
7 基準クロック生成部
8 位相比較部
9 波形調整部
9A 第1イコライザ
9B 第2イコライザ
9C 第3イコライザ
9D 加算器
10 ドライバ
21、23 切替器
22 位相比較器群
DK 光ディスク
SR、SRR 回転制御装置
【技術分野】
【0001】
本願は、回転制御装置、回転制御方法及び回転制御用プログラムの技術分野に属し、より詳細には、例えば光ディスク等の円盤の回転を制御する回転制御装置及び回転制御方法並びに当該回転制御に用いられるプログラムの技術分野に属する。
【背景技術】
【0002】
光ビームを用いて光学的に情報が記録又は再生される光ディスクの分野において、近年、当該光ディスクにおいて当該情報記録再生用の光ビームが照射される面(以下、当該面を情報記録面と称する)とは反対の面(以下、当該面をレーベル面と称する)に、上記光ビームを用いて視認可能な文字や図形等を描画する技術が開発されている。
【0003】
この技術においては、当該レーベル面における同一の半径位置一周分に対して照射する光ビームの強度を、当該レーベル面に描画すべき当該図形等の形に応じて変えることで、その位置における可視光の反射率を変え、これにより上記文字や図形等を階調変化により視認可能に描画する。これに加えて更に、当該強度変更の制御を上記一周分に対して複数回(複数周回分)行うことで、上記図形等としてのより高いコントラストを実現することが可能となっている。
【0004】
一方、上記情報記録面に対して情報を光学的に記録する場合、従来では、元々当該情報記録面に形成されている記録トラックに対して当該情報記録用の光ビームを照射し、その反射光に含まれているアドレス情報やいわゆるウォブリング情報に基づいて当該情報の記録位置を制御したり光ディスク自体の回転速度又は回転数を制御する構成となっていた。
【0005】
しかしながら、上記レーベル面については、言うまでも無く上記記録トラックは形成されていないため、特に上記回転速度又は回転数の制御に当たっては、その回転対象である光ディスクから得られる情報を用いることなく行わざるを得ない状況となる。
【0006】
この点、従来では、当該光ディスクを回転させるいわゆるスピンドルモータから得られるパルス信号における各パルスのタイミングを基準として当該光ディスクの回転を制御する構成とされている。そして、このような構成において、その回転制御の精度を上げるための構成としては、例えば下記特許文献1に例示されるものがある。
【特許文献1】特開2005−317150
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に記載されている技術では、上記スピンドルモータからその回転に対して高精度で同期した信号が出力されてくることが前提となっているが、当該同期した信号の精度は、部品コスト等の観点から余り高くない場合が一般的であり、上記特許文献1記載の技術は、実際には現実的であるとは言い難い。
【0008】
このような事情から、記録トラック等が何ら存在しない光ディスクを回転させるスピンドルモータの回転に対して高精度で同期した信号が得られなくとも、当該光ディスクの回転を高精度で制御しうる回転制御装置が求められている。
【0009】
そこで、本願は、上記の事情に鑑みて為されたもので、その課題の一例は、記録トラック等が何ら存在しない光ディスクのレーベル面等に対する情報の記録を行う際に、当該光ディスクを回転させるスピンドルモータの回転に対して高精度で同期した信号が得られなくとも、より高精度に当該光ディスクの回転を制御することが可能な回転制御装置及び回転制御方法並びに当該回転制御に用いられるプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、光ディスク等の円盤の回転を制御する回転制御装置において、前記回転の状況に対応したパルス信号を生成するパルス生成部等のパルス生成手段と、前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する速度/位相比較部等の第1エラー信号生成手段と、各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する位相比較部等の第2エラー信号生成手段と、前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御するドライバ等の制御手段と、を備える。
【0011】
上記の課題を解決するために、請求項7に記載の発明は、光ディスク等の円盤の回転を制御する回転制御方法において、前記回転の状況に対応したパルス信号を生成するパルス生成工程と、前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成工程と、各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成工程と、前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御工程と、を含んで構成される。
【0012】
上記の課題を解決するために、請求項8に記載の発明は、請求項1から6のいずれか一項に記載の回転制御装置であって前記パルス生成手段を備える回転制御装置に含まれるコンピュータを、前記第1エラー生成手段、前記第2エラー生成手段、及び、前記制御手段、として機能させる。
【発明を実施するための最良の形態】
【0013】
次に、本願を実施するための最良の形態について、図面に基づいて説明する。なお、以下に説明する実施形態は、円盤としての光ディスクを回転させ、当該光ディスクの上記レーベル面に対して視認可能な図形を描画する描画装置に含まれ、当該光ディスクの回転状態を制御する回転制御装置に対して本願を適用した場合の実施の形態である。
【0014】
(I)第1実施形態
始めに、本願に係る第1実施形態について、図1乃至図3を用いて説明する。
【0015】
なお、図1は第1実施形態に係る回転制御装置の概要構成を示すブロック図であり、図2は当該回転制御装置の動作を示すタイミングチャートであり、図3は当該回転制御装置の動作を示すフローチャートである。このとき、図1は、上記描画装置の内、第1実施形態に係る回転制御装置として機能する部分のみを抽出して示すブロック図である。
【0016】
図1に示すように、第1実施形態に係る回転制御装置SRは、光ディスクDKが固定されているスピンドルモータ1と、当該スピンドルモータ1に内蔵されている図示しない複数のホール素子の出力信号が入力されるように構成されているパルス生成手段としてのパルス生成部2と、エラー信号生成部3と、波形調整部9と、制御手段としてのドライバ10と、により構成されている。
【0017】
また、上記エラー信号生成部3は、エッジ検出部4と、第1エラー信号生成手段としての速度/位相比較部5と、カウンタ6と、基準クロック生成部7と、第2エラー信号生成手段としての位相比較部8と、により構成されている。
【0018】
更に、振幅調整部9は、第1イコライザ9Aと、第2イコライザ9Bと、第3イコライザ9Cと、加算器9Dと、により構成されている。
【0019】
この構成において、スピンドルモータ1は、ドライバ10からの駆動信号Sdに基づき、予め設定された回転数で光ディスクDKを回転させる。
【0020】
そして、パルス生成部2は、いわゆるFG(Frequency Generator)として機能するものであり、上記複数のホール素子夫々からの上記出力信号に基づいて当該光ディスクの回転速度に相当する周波数を有するパルスを生成し、パルス信号Sfgとしてエラー信号生成部3に出力する。ここで、当該パルス信号Sfgは、具体的には例えば、光ディスクDK一回転につき三つのパルスを含むパルス信号Sfgである。
【0021】
次に、エラー信号生成部3は、当該パルス信号Sfgに基づき、当該パルス信号Sfgに含まれる全パルスを夫々用いて光ディスクDKの回転状態に対応する速度エラー信号Serd及び位相エラー信号(以下、当該位相エラー信号を第1位相エラー信号Ser1とする)を従来と同様の方法により生成して振幅調整部9に出力する。これに加えてエラー信号生成部3は、当該全パルスのうち、光ディスクDKの一回転が終了するたびに出力されてくるパルスのみを用いて、当該回転状態に対応する他の位相エラー信号(以下、当該他の位相エラー信号を第2位相エラー信号Ser2とする)を生成して振幅調整部9に出力する。
【0022】
これらにより、振幅調整部9内の第1イコライザ9Aは、上記速度エラー信号Serdの振幅のみを、予め設定された値に調整して第1イコライザ信号Seq1を生成し、加算器9Dに出力する。また、振幅調整部9内の第2イコライザ9Bは、上記第1位相エラー信号Ser1の振幅のみを、予め設定された値に調整して第2イコライザ信号Seq2を生成し、加算器9Dに出力する。更に、振幅調整部9内の第3イコライザ9Cは、上記第2位相エラー信号Ser2の振幅のみを、予め設定された値に調整して第3イコライザ信号Seq3を生成し、加算器9Dに出力する。
【0023】
ここで、当該各イコライザにおける振幅の調整は、例えば、速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2夫々に対して、予め実験的に設定された値を乗算することにより実行される。このとき、速度エラー信号Serdに対する乗算値をAとし、第1位相エラー信号Ser1に対する乗算値をBとし、第2位相エラー信号Ser2に対する乗算値をCとしたとき、夫々の乗算値間の関係としては、例えば、A>C>B(例えばA:C:B=32:10:1)となるように設定することが好ましい。
【0024】
次に、加算器9Dは、上記第1イコライザ信号Seq1、第2イコライザ信号Seq2及び第3イコライザ信号Seq3について、同じタイミングの当該各イコライザ信号同士を加算し、加算信号Saddを生成してドライバ10に出力する。
【0025】
これにより、ドライバ10は、当該加算信号Saddにより示される回転エラー(回転速度の誤差や回転ムラ等)を補償するようにいわゆる帰還制御を実行しつつ、スピンドルモータ1を回転させるための上記駆動信号Sdを生成して当該スピンドルモータ1に出力する。
【0026】
次に、上記エラー信号生成部3における動作に詳細について、図1及び図2を用いて説明する。なお、以下の説明では、光ディスクDK一回転(換言すれば、スピンドルモータ一回転)につき、上記パルス生成部2から三つのパルスを含む上記パルス信号Sfgが出力される回転速度が、当該光ディスクDKとしての正規の(換言すればその値に回転制御されるべき)回転速度であるものとする。
【0027】
上述したように、エラー信号生成部3は、エッジ検出部4、速度/位相比較部5、カウンタ6、基準クロック生成部7及び位相比較部8により構成されているが、このうち、エッジ検出部4は、パルス信号Sfgに含まれている各パルスにおける立ち上がりエッジ又は立下りエッジのいずれか一方のみのタイミングを、エッジ信号Segに含まれる全てのパルスにおける当該いずれか一方のエッジ毎に検出し、エッジ信号Segとしてカウンタ6及び速度/位相比較部5に出力する。
【0028】
ここで、以下の説明では、パルス信号Sfgに含まれている各パルスにおける立ち上がりエッジのみのタイミングを当該エッジ毎に検出したものをエッジ信号Segとして出力するものとする。
【0029】
一方、基準クロック生成部7は、スピンドルモータ1が回転すべき本来の回転速度として予め設定されている回転速度に相当する周波数を有するクロック信号Sclkを生成し、速度/位相比較部5及び位相比較部8に出力する。
【0030】
これらにより、速度/位相比較部5は、従来におけるパルス信号Sfgを用いた回転制御の場合と同様に、上記クロック信号Sclkにより示されるタイミングと、エッジ信号Segにより示されるパルス毎のタイミングとを比較し、その誤差を上記速度エラー信号Serd及び第1位相エラー信号Ser1として振幅調整部9に出力する。
【0031】
より具体的には、図2最上段及び上から二段目に例示するように、上記エッジ信号Segにおける各立ち上がりエッジの間隔を夫々r1、r2、r3、r4、…、として連続的に検出し、当該検出された夫々の間隔と、上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、エッジ信号Segの一波長分遅れたタイミングにおける速度エラー信号Serdの振幅に相当するように当該速度エラー信号Serdを生成して、上記振幅調整部9に出力する。
【0032】
これと並行して、速度/位相比較部5は、図2上から二段目及び三段目に例示するように、上記エッジ信号Segにおける各立ち上がりエッジの間隔を、当該エッジ信号Segの一波長分以上複数波長分に渡ってP1A、P1B、P1C、P2A、P2B、P2C、…、として夫々別個に且つ連続的に検出することを光ディスクDKの複数回転について行い、、当該検出された夫々の間隔P1A、P1B、P1C、…、と、夫々の間隔に対応して上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、当該各間隔毎に当該誤差が検出されるタイミングに対応したタイミングにおける第1位相エラー信号Ser1の振幅に相当するように当該第1位相エラー信号Ser1を生成して、上記振幅調整部9に出力する。
【0033】
他方、本願に係るカウンタ6は、上記エッジ信号Segにおける光ディスクDK一回転の長さ相当する波長を有するタイミング信号Stmg(図2下から二段目参照)を生成し、位相比較部8に出力する。
【0034】
これにより、本願に係る位相比較部8は、上記クロック信号Sclkにより示されるタイミングと、タイミング信号Stmgにより示されるタイミングとを比較し、その誤差を上記第2位相エラー信号Ser2として振幅調整部9に出力する。
【0035】
より具体的には、図2上から最下段及び下から二段目に例示するように、上記タイミング信号Stmgにおける各立ち上がりエッジの間隔を、当該タイミング信号Stmgの一波長分、二波長分、三波長分、…(換言すれば、光ディスクDKの一回転分、二回転分、三回転分、…)について、PP1A、PP1B、PP1C、…、として夫々別個に且つ連続的に検出し、当該検出された夫々の間隔と、夫々の間隔に対応して上記クロック信号Sclkにより示される正規の当該立ち上がりエッジの間隔と、の誤差が、当該各間隔毎に当該誤差が検出されるタイミングに対応したタイミングにおける第2位相エラー信号Ser2の振幅に相当するように当該第2位相エラー信号Ser2を生成して、上記振幅調整部9に出力する。
【0036】
次に、上述した構成を備える回転制御装置SRにおける回転制御動作につき、全体を通して図3を用いて説明する。
【0037】
図3に示すように、第1実施形態に係る回転制御動作では、通常は上記速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみをドライバ10に出力することで、スピンドルモータ1の回転制御を行う(ステップS1)。より具体的には、通常は、上記第1位相エラー信号Ser1及び第2位相エラー信号Ser2の出力は速度エラー信号Serdと共に継続してはいるものの、上記第2イコライザ信号Seq2及び上記第3イコライザ信号Seq3については、夫々第2イコライザ9B及び第3イコライザ9Cからの出力が停止(ミュート)されている。
【0038】
そして、当該速度エラー信号Serdを用いた回転制御中においては、光ディスクDKの回転を停止させるか否かを確認し(ステップS2)、停止させるときは(ステップS2;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0039】
他方、ステップS2の判定において、光ディスクDKの回転制御を継続するときは(ステップS2;NO)、次に、何らかの原因によりその回転速度又は回転数が不安定になったか否か(より具体的には、例えば光ディスクDKのレーベル面に対する描画精度が維持できなくなったか否か)を監視し(ステップS3)、当該不安定になったときは(ステップS3;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御によりその不安定化の回復に努める。
【0040】
一方、ステップS3の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS3;YES)、更なる安定化及び精度の向上を図るべく、第2イコライザ9Bから上記第2イコライザ信号Seq2の出力を開始し、速度エラー信号Serdに基づく上記第1イコライザ信号Seq1と共に光ディスクDKの回転制御に供させる(ステップS4)。
【0041】
次に、当該速度エラー信号Serd及び第1位相エラー信号Ser1を共に用いた回転制御中においては、上記ステップS2の処理と同様に何らかの原因によりその回転速度又は回転数が不安定になったか否かを監視し(ステップS5)、当該不安定になったときは(ステップS5;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御から再開してその不安定化の回復に努める。
【0042】
一方、ステップS5の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS5;YES)、次に光ディスクDKの回転を停止させるか否かを確認し(ステップS6)、停止させるときは(ステップS6;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0043】
他方、ステップS6の判定において、光ディスクDKの回転制御を継続するときは(ステップS6;NO)、更なる安定化及び精度の向上を図るべく、第3イコライザ9Cから上記第3イコライザ信号Seq3の出力を開始し、第1位相エラー信号Ser1に基づく上記第2イコライザ信号Seq2及び速度エラー信号Serdに基づく上記第1イコライザ信号Ser1と共に光ディスクDKの回転制御に供させる(ステップS7)。
【0044】
最後に、当該速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2を全て用いた回転制御中においては、上記ステップS2又はS5の処理と同様に何らかの原因により更に回転速度又は回転数が不安定になったか否かを監視し(ステップS8)、当該不安定になったときは(ステップS8;NO)、上記ステップS4に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1及び第1位相エラー信号Ser1から生成された第2イコライザ信号Seq2を用いた回転制御から再開してその不安定化の回復に努める。
【0045】
一方、ステップS8の判定において、当該回転速度又は回転数が不安定になっていないときは(ステップS8;YES)、次に光ディスクDKの回転を停止させるか否かを確認し(ステップS9)、停止させるときは(ステップS9;YES)、そのまま第1実施形態に係る回転制御動作を終了する。
【0046】
他方、ステップS9の判定において、光ディスクDKの回転制御を継続するときは(ステップS9;NO)、現状の安定度及び回転精度を維持すべく上記ステップS7に戻り、速度エラー信号Serd、第1位相エラー信号Ser1及び第2位相エラー信号Ser2を全て用いた回転制御を継続する。
【0047】
以上説明したように、第1実施形態に係る回転制御装置SRの動作によれば、光ディスクDKの回転に応じて生成されるパルス信号Sfgにおける各パルスに対応する速度エラー信号Serd及び第1位相エラー信号Ser1と、一回の回転に夫々相当するパルスに対応する第2位相エラー信号Ser2と、を共に用いて光ディスクDKの回転を制御するので、速度エラー信号Serd及び第1位相エラー信号Ser1のみに基づいて当該回転を制御する場合に比してより長い間隔のパルスに基づく精度の高い第2位相エラー信号Ser2を用いることで、より正確に当該回転における回転速度又は回転数を制御することができる。
【0048】
また、一つのパルスに相当するタイミングから起算して一又は複数回転が終了するタイミングに夫々相当する第2位相エラー信号Ser2が回転制御に用いられるので、光ディスクDKの回転が繰り返されることにより累積される回転エラーをも考慮して正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0049】
更に、速度エラー信号Serd及び第1位相エラー信号Ser1と、第2位相エラー信号Ser2と、を共に回転制御に用いるので、速度エラー信号Serd及び二種類の位相エラー信号Serを用いてより正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0050】
更にまた、信服調整部9により、第2位相エラー信号Ser2の振幅を第1位相エラー信号Ser1の振幅よりも大きくなるように変換して双方を加算し、回転の制御に用いるので、回転ムラの影響を受け易い第1位相エラー信号Ser1の影響を低減しつつ正確に光ディスクDKの回転を制御することができる。
【0051】
また、速度エラー信号Serdが常時回転の制御に用いられると共に、第1位相エラー信号Ser1及び第2位相エラー信号Ser2については当該第1位相エラー信号Ser1を回転の制御に用い始めるタイミングを第2位相エラー信号Ser2のそれよりも早めて当該回転の制御を行うので、回転制御の正確性を維持することができる。
【0052】
なお、図3に示すステップS8の判定において、回転速度又は回転数が不安定になったとき(ステップS8;NO)、上記ステップS1に戻って速度エラー信号Serdから生成された上記第1イコライザ信号Seq1のみを用いた回転制御から再開してその不安定化の回復に努めるように構成することもできる。
【0053】
(II)第2実施形態
次に、本願に係る他の実施形態である第2実施形態について、図4及び図5を用いて説明する。
【0054】
なお、図4は第2実施形態に係る回転制御装置の概要構成を示すブロック図であり、図5は当該回転制御装置の動作を示すタイミングチャートである。また、図4及び図5において、上記第1実施形態における図1及び図2と同様の構成部材については、同一の部材番号又は符号を付して細部の説明は省略する。
【0055】
上述した第1実施形態においては、その図2において例示したように、パルス信号Sfgに含まれる全パルスのうち、光ディスクDK一回転分内の三つのパルスのいずれか一つのタイミングを起算点として第2位相エラー信号Ser2を生成する場合について説明したが、以下に説明する第2実施形態では、パルス信号Sfgに含まれる全パルスのうち、光ディスクDK一回転分内の三つのパルス全てのタイミングを夫々に起算点として、第2位相エラー信号(以下、第2実施形態に係る第2位相エラー信号を、第2位相エラー信号Sr2とする)を生成して光ディスクDKの回転制御に用いる。
【0056】
図4に示すように、第2実施形態に係る回転制御装置SRRは、第1実施形態に係る回転制御SRを構成するものと同様の構成及び機能を備えるスピンドルモータ1、パルス生成部2、波形調整部9及びドライバ10に加えて、第2実施形態としての独自の構成を備えるエラー信号生成部20により構成されている。
【0057】
そして、当該エラー信号生成部20は、第1実施形態に係るエラー信号生成部3を構成するものと同様の構成及び機能を備えるエッジ検出部4、速度/位相比較部5及び基準クロック生成部7に加えて、切替器21及び23と、位相比較器群22と、により構成されている。
【0058】
そして更に、位相比較器群22は、光ディスクDK一回転の相当する上記パルス信号Sfgのパルス数(第1及び第2実施形態の場合において三つ)と同数の位相比較器を備えている。
【0059】
この構成において、切替器21は、エッジ信号Segに含まれる全パルスのうち、光ディスクDK一回転に必要な時間に相当する三つのパルス夫々の立ち上がりタイミングを夫々の立ち上がりタイミングとし且つ当該一回転と等しい波長を有するタイミング信号St1乃至St3(図5上から四段目乃至下から二段目参照)を生成し、夫々別個に位相比較器群22内の各位相比較器に出力する。
【0060】
これにより、当該各位相比較器は、上記クロック信号Sclkにより示されるタイミングと、各タイミング信号St1乃至St3により示されるタイミングとを夫々別個に比較し、その誤差を夫々誤差信号Sg1乃至Sg3として切替器23に出力する。
【0061】
そして、切替器23は、各誤差信号Sg1乃至Sg3夫々により示されているタイミング誤差を振幅とする第2位相エラー信号Sr2を生成し、上記信服調整部9内の第3イコライザ9Cに出力する。
【0062】
より具体的には、先ず上から図5二段目並びに四段目乃至六段目に例示するように、上記エッジ信号Segにおいて光ディスクDK一回転に相当する三つのパルスの立ち上がりタイミングを夫々の立ち上がりタイミングとし且つ光ディスクDK一回転の長さを夫々の一波長の長さとする上記三つのタイミング信号St1乃至St3が切替器21において生成され、夫々別個に位相比較器群22内の各位相比較器に出力される。
【0063】
そして、図5上から四段目及び最下段に例示するように、当該位相比較器群内の図示しない第1位相比較器及び切替器23は、タイミング信号St1における一波長分、二波長分及び三波長分(換言すれば、光ディスクDKの一回転分、二回転分及び三回転分)の時間を夫々Se1a、Se1b及びSe1cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St1において上記時間Se1a、Se1b及びSe1cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0064】
これと並行して、当該位相比較器群内の図示しない第2位相比較器及び切替器23は、図5上から五段目及び最下段に例示するように、タイミング信号St2における一波長分、二波長分及び三波長分の時間を夫々Se2a、Se2b及びSe2cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St2において上記時間Se2a、Se2b及びSe2cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0065】
更に、当該位相比較器群内の図示しない第3位相比較器及び切替器23は、図5上から六段目及び最下段に例示するように、タイミング信号St3における一波長分、二波長分及び三波長分の時間を夫々Se3a、Se3b及びSe3cとして夫々別個に且つ連続的に検出し、当該検出された夫々の時間と、上記クロック信号Sclkにおける光ディスクDKの一回転分、二回転分及び三回転分に相当する立ち上がりエッジの間隔と、の誤差が、タイミング信号St3において上記時間Se3a、Se3b及びSe3cが夫々経過した直後のタイミングにおける第2位相エラー信号Sr2の振幅に相当するように当該第2位相エラー信号Sr2を生成して、上記振幅調整部9に出力する。
【0066】
その後は、第1実施形態に係る回転制御装置SRのものと同様の速度エラー信号Serd及び第1位相エラー信号Ser1に加えて上記第2位相エラー信号Sr2を用いて、第1実施形態において図3を用いて説明した場合と同様の動作を行って第2実施形態に係る回転制御動作を実行する。
【0067】
以上説明したように、第2実施形態に係る回転制御装置SRRの動作によれば、光ディスクDKの回転に応じて生成されるパルス信号Sfgにおける各パルスに対応する速度エラー信号Serd及び第1位相エラー信号Ser1と、一回の回転に夫々相当するパルスに対応する第2位相エラー信号Sr2と、を共に用いて光ディスクDKの回転を制御するので、速度エラー信号Serd及び第1位相エラー信号Ser1のみに基づいて当該回転を制御する場合に比してより長い間隔のパルスに基づく第2位相エラー信号Sr2を用いることで、より正確に当該回転における回転速度又は回転数を制御することができる。
【0068】
また、光ディスクDKの一回転中に生成される全てのパルスに相当する各タイミングから夫々起算して一又は複数の回転が夫々終了する各タイミングに夫々相当する第2エラー信号Sr2が回転制御に用いられるので、光ディスクDKの回転が繰り返されることにより累積される回転エラーをも考慮して正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0069】
更に、速度エラー信号Serd及び第1位相エラー信号Ser1と、第2位相エラー信号Sr2と、を共に回転制御に用いるので、速度エラー信号Serd及び二種類の位相エラー信号を用いてより正確に光ディスクDKの回転速度又は回転数を制御することができる。
【0070】
更にまた、信服調整部9により、第2位相エラー信号Sr2の振幅を第1位相エラー信号Ser1の振幅よりも大きくなるように変換して双方を加算し、回転の制御に用いるので、回転ムラの影響を受け易い第1位相エラー信号Ser1の影響を低減しつつ正確に光ディスクDKの回転を制御することができる。
【0071】
また、速度エラー信号Serdが常時回転の制御に用いられると共に、第1位相エラー信号Ser1及び第2位相エラー信号Sr2については当該第1位相エラー信号Ser1を回転の制御に用い始めるタイミングを第2位相エラー信号Sr2のそれよりも早めて当該回転の制御を行うので、回転制御の正確性を維持することができる。
【0072】
なお、上述した第2実施形態においては、パルス信号Sfgのパルスのうち、光ディスクDK一回転に相当する三つのパルスを全て起算点として用いたが、当該一回転に相当するパルス数が多数に上る場合は、その一部(例えば半数や三分の一の数)のパルス夫々を起算点として上記第2位相エラー信号Sr2を生成するように構成することもできる。この場合、当該第2位相エラー信号Sr2としての均質性を考慮するならば、当該起算点とするパルスを当該一回転に相当するパルスの中から等間隔に選ぶのが好ましい。
【0073】
また、上述した各実施形態では、各エラー信号の活用順序としては、図3に示す如く、
速度エラー信号Serd→速度エラー信号Serd+第1位相エラー信号Ser1→速度エラー信号Serd+第1位相エラー信号Ser1+第2位相エラー信号Ser2(Sr2)
と言う態様を用いたが、これ以外に、上記第1位相エラー信号Ser1を用いずに、速度エラー信号Serdと第2位相エラー信号Ser2(Sr2)のみを、
速度エラー信号Serd→速度エラー信号Serd+第2位相エラー信号Ser2(Sr2)
と言う態様で活用してもよい。
【0074】
更に、上述した各実施形態は、光ディスクDKのレーベル面に対して視認可能な画像を描画する描画装置における当該光ディスクDKの回転制御に対して本願を適用した場合について説明したが、これ以外に、光ディスクDKから何ら情報を得られず且つ上記パルス信号Sfgの如きスピンドルモータ1の回転に対して高精度で同期した信号が得られない場合でも高精度で円盤の回転を制御しなければならない場合に、本願を広く適用することが可能である。
【0075】
更にまた、図2及び図3又は図5に示すフローチャート及びタイミングチャートに対応するプログラムを、フレキシブルディスク又はハードディスク等の情報記録媒体に記録しておき、又はインターネット等を介して取得して記録しておき、これらを汎用のコンピュータで読み出して実行することにより、当該コンピュータを各実施形態に係る回転制御装置SR又はSRRとして活用することも可能である。
【図面の簡単な説明】
【0076】
【図1】第1実施形態に係る回転制御装置の概要構成を示すブロック図である。
【図2】第1実施形態に係る回転制御装置の動作を示すタイミングチャートである。
【図3】第1実施形態に係る回転制御装置の動作を示すフローチャートである。
【図4】第2実施形態に係る回転制御装置の概要構成を示すブロック図である。
【図5】第2実施形態に係る回転制御装置の動作を示すタイミングチャートである。
【符号の説明】
【0077】
1 スピンドルモータ
2 パルス生成部
3、20 エラー信号生成部
4 エッジ検出部
5 速度/位相比較部
6 カウンタ
7 基準クロック生成部
8 位相比較部
9 波形調整部
9A 第1イコライザ
9B 第2イコライザ
9C 第3イコライザ
9D 加算器
10 ドライバ
21、23 切替器
22 位相比較器群
DK 光ディスク
SR、SRR 回転制御装置
【特許請求の範囲】
【請求項1】
円盤の回転を制御する回転制御装置において、
前記回転の状況に対応したパルス信号を生成するパルス生成手段と、
前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成手段と、
各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成手段と、
前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御手段と、
を備えることを特徴とする回転制御装置。
【請求項2】
請求項1に記載の回転制御装置において、
前記第2エラー信号生成手段は、予め設定された一つの前記パルスに相当するタイミングから起算して一又は複数の前記回転が終了するタイミングに夫々相当する前記第2エラー信号を生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項3】
請求項1に記載の回転制御装置において、
前記第2エラー信号生成手段は、一回の前記回転中に生成される複数の前記パルスに相当する各タイミングから夫々起算して一又は複数の前記回転が夫々終了する各タイミングに夫々相当する前記第2エラー信号を夫々生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項4】
請求項1から3のいずれか一項に記載の回転制御装置において、
前記第1エラー信号生成手段は、各前記パルスに基づいて前記回転における速度エラーを示す速度エラー信号と、当該各パルスに基づいて前記回転における位相エラーを示す第1位相エラー信号と、を夫々生成して前記制御手段に共に出力すると共に、
前記第2エラー信号生成手段は、一回の前記回転が終了するタイミングに夫々相当する各前記パルスに基づいて前記回転における位相エラー又は速度エラーの少なくともいずれか一方を示す前記第2エラー信号を生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項5】
請求項4に記載の回転制御装置において、
前記制御手段は、前記第2位相エラー信号の振幅が前記第1位相エラー信号の振幅よりも大きくなるようにして当該第2位相エラー信号を当該第1位相エラー信号に加算して前記回転の制御に用いることを特徴とする回転制御装置。
【請求項6】
請求項4又は5に記載の回転制御装置において、
前記制御手段は、前記速度エラー信号を常時前記回転の制御に用いると共に、
前記第1位相エラー信号及び前記第2位相エラー信号を、各々間欠的且つ当該第1位相エラー信号を前記回転の制御に用い始めるタイミングを当該第2位相エラー信号を前記回転の制御に用い始めるタイミングよりも早めて、前記回転の制御に用いることを特徴とする回転制御装置。
【請求項7】
円盤の回転を制御する回転制御方法において、
前記回転の状況に対応したパルス信号を生成するパルス生成工程と、
前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成工程と、
各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成工程と、
前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御工程と、
を含むことを特徴とする回転制御方法。
【請求項8】
請求項1から6のいずれか一項に記載の回転制御装置であって前記パルス生成手段を備える回転制御装置に含まれるコンピュータを、
前記第1エラー生成手段、
前記第2エラー生成手段、及び、
前記制御手段、
として機能させることを特徴とする回転制御用プログラム。
【請求項1】
円盤の回転を制御する回転制御装置において、
前記回転の状況に対応したパルス信号を生成するパルス生成手段と、
前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成手段と、
各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成手段と、
前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御手段と、
を備えることを特徴とする回転制御装置。
【請求項2】
請求項1に記載の回転制御装置において、
前記第2エラー信号生成手段は、予め設定された一つの前記パルスに相当するタイミングから起算して一又は複数の前記回転が終了するタイミングに夫々相当する前記第2エラー信号を生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項3】
請求項1に記載の回転制御装置において、
前記第2エラー信号生成手段は、一回の前記回転中に生成される複数の前記パルスに相当する各タイミングから夫々起算して一又は複数の前記回転が夫々終了する各タイミングに夫々相当する前記第2エラー信号を夫々生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項4】
請求項1から3のいずれか一項に記載の回転制御装置において、
前記第1エラー信号生成手段は、各前記パルスに基づいて前記回転における速度エラーを示す速度エラー信号と、当該各パルスに基づいて前記回転における位相エラーを示す第1位相エラー信号と、を夫々生成して前記制御手段に共に出力すると共に、
前記第2エラー信号生成手段は、一回の前記回転が終了するタイミングに夫々相当する各前記パルスに基づいて前記回転における位相エラー又は速度エラーの少なくともいずれか一方を示す前記第2エラー信号を生成して前記制御手段に出力することを特徴とする回転制御装置。
【請求項5】
請求項4に記載の回転制御装置において、
前記制御手段は、前記第2位相エラー信号の振幅が前記第1位相エラー信号の振幅よりも大きくなるようにして当該第2位相エラー信号を当該第1位相エラー信号に加算して前記回転の制御に用いることを特徴とする回転制御装置。
【請求項6】
請求項4又は5に記載の回転制御装置において、
前記制御手段は、前記速度エラー信号を常時前記回転の制御に用いると共に、
前記第1位相エラー信号及び前記第2位相エラー信号を、各々間欠的且つ当該第1位相エラー信号を前記回転の制御に用い始めるタイミングを当該第2位相エラー信号を前記回転の制御に用い始めるタイミングよりも早めて、前記回転の制御に用いることを特徴とする回転制御装置。
【請求項7】
円盤の回転を制御する回転制御方法において、
前記回転の状況に対応したパルス信号を生成するパルス生成工程と、
前記生成されたパルス信号における各パルスに基づいて前記回転における回転エラーを示す第1エラー信号を生成する第1エラー信号生成工程と、
各前記パルスのうち、一回の前記回転が終了するタイミングに夫々相当する当該パルスに基づいて前記回転における回転エラーを示す第2エラー信号を生成する第2エラー信号生成工程と、
前記夫々生成された第1エラー信号及び第2エラー信号に基づいて、前記回転を制御する制御工程と、
を含むことを特徴とする回転制御方法。
【請求項8】
請求項1から6のいずれか一項に記載の回転制御装置であって前記パルス生成手段を備える回転制御装置に含まれるコンピュータを、
前記第1エラー生成手段、
前記第2エラー生成手段、及び、
前記制御手段、
として機能させることを特徴とする回転制御用プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−93683(P2009−93683A)
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2006−15706(P2006−15706)
【出願日】平成18年1月24日(2006.1.24)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成18年1月24日(2006.1.24)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]