
回転動作を直線動作に変換するための機構を含むアクチュエータ
基準フレームに対してボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスが提案される。この抑制デバイスは、少なくとも一つの方向へのボディの移動に対応する入力信号を提供するセンサーと、ボディのポジションを制御するよう構成されたロータリーモーターと、ボディに対してロータリーモーターを連結する4本バーリンケージとを含む。リンケージは、モーターからの回転動作出力をボディの直線動作へと変換する。コントローラは、基準フレームセンサーからの入力信号に基づいて、基準フレームのポジションに対して少なくとも一つの方向においてボディを位置調整するためにリンケージを介して作用するロータリーモーターに制御信号を提供する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転動作を直線動作に変換するための機構を含むアクチュエータに関する。
【背景技術】
【0002】
アクティブ振動抑制システムが、車両シートの振動を抑制するために採用されている。たとえば、車両振動に対するシートの応答を低減するスプリングおよびダンパーを含むパッシブシステムの代わりに、アクティブ振動抑制システムは、シートの振動を検出し、検出された動作をキャンセルするためにシートのポジションを制御し、これによってシートを車両の振動から切り離す。そうしたアクティブ振動抑制システムは、コントローラによって制御されるリニア・アクチュエータを含むことがある。このリニア・アクチュエータは、車両のフレームに対するシートポジションを制御するためにシートの下に配置される。たとえば、リニア・アクチュエータは、一端においてシートに固定されたアーマチュアを含む、リニア電磁石モーターを含むことがある。このアーマチュアは、コントローラからの制御信号に基づいて、ステータに対して直線的に突出・後退し、これによってシートを位置調整する。
【0003】
制御されたリニア・アクチュエータは、車両シート振動抑制以外のシステムに対する用途を有する。たとえば、制御されたリニア・アクチュエータはまた、車輪サスペンションシステムにおいて、そしてエンジンバルブ制御システムにおいて使用されることも知られている。
【0004】
多くの用途において、物体のポジションを制御するために、そうしたリニア・アクチュエータを使用することに関連する課題は、たとえばアクティブ振動抑制システムにおけるシートと床との間の制限されたスペース内で十分な直線移動距離を実現するリニアモーターを提供することを含む。別な課題は、リニアモーターに関連する公知のコストおよびメンテナンス問題を含む。
【発明の概要】
【課題を解決するための手段】
【0005】
ある態様では、ボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスは、少なくとも一つの方向へのボディの移動に対応する入力信号を提供するよう構成された少なくとも一つのセンサーと、ボディのポジションを制御するよう構成されたロータリーモーターと、ロータリーモーターをボディに連結する少なくとも二つの回動可能に連結されたリンクを備えるリンケージとを含む。このリンケージは、モーターからの回転動作出力をボディの直線動作へと変換するよう構成される。本デバイスはさらに、コントローラであって、少なくとも一つのセンサーからの入力信号に基づいて、少なくとも一つの方向へボディを位置調整するためにリンケージを介して作用するロータリーモーターに制御信号を提供するコントローラを含む。
【0006】
本発明の別な態様では、アクチュエータは、出力シャフトおよびモーターハウジングを含むロータリーモーターと、このロータリーモーターの出力シャフトに接続されたリンケージとを備える。リンケージは、第1の回転軸線を形成するハウジングピボットピンと、出力シャフトに固定された第1のリンクとを有するモーターハウジングを含む。出力シャフトは第2の回転軸線を形成し、かつ、第2の回転軸線は第1の回転軸線と平行でありかつそれから離間させられている。第1のリンクは、第2の回転軸線から離間させられた位置に配置された第1のリンクピボットピンを含み、かつ、第1の回転軸線と平行な第3の回転軸線を画定する。リンケージは、第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクを含む。第2のリンクは、第1の回転軸線と平行な第4の回転軸線を形成する第2のリンクピボットピンを含む。この第2のリンクピボットピンは第2のリンクの第1の端部と第2のリンクの所定のポイントとの間に配置されている。リンケージはさらに、ハウジングピボットピンに対して第1の端部において回動可能に連結され、かつ、第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクを含む。アクチュエータの作動中、出力シャフトの回転は、ハウジングに対する所定ポイントの直線動作を生じる。
【0007】
アクティブ振動抑制デバイスおよびアクチュエータは、以下の特徴の一つ以上を含んでいてもよい。ボディにおいてモーターによって生み出されるトルクは、出力シャフトの100度の角回転にわたって実質的に一定である。リンケージは、ボディの動作が出力シャフトの180度の回転にわたって出力シャフトの角変位に実質的に比例するように、モーターの出力シャフトの回転動作を直線動作へと変換するよう構成される。リンケージは、トルクが少なくとも4インチのボディの変位の範囲にわたって実質的に一定であるように、出力シャフトの回転動作を直線動作へと変換するよう構成される。
【0008】
アクティブ振動抑制デバイスのコントローラは、制御されるボディの姿勢といったボディを位置調整するためにリンケージを介して作用するロータリーモーターに対して出力信号を提供する。アクティブ振動抑制デバイスは第2のリンケージを備え、当該リンケージの一つはモーターの対向する側のそれぞれにおいてモーターの出力シャフトに連結されている。本デバイスはさらに、第2のロータリーモーターと、ボディのポジションを制御するよう構成された第2のリンケージとを備え、第1および第2のロータリーモーターは、その個々のローター軸線が平行であるように配置される。当該デバイスはさらに、第2のロータリーモーターと、ボディのポジションを制御するよう構成された第2のリンケージとを含み、第1および第2のロータリーモーターは、その個々のローター軸線が共直線状であるように配置される。
【0009】
ある実施形態では、ボディは、たとえば車両内に配置された車両シートを含み、車両の床に対して固定されたロータリーモーターは、床とシートとの間に配置される。ボディの直線移動距離は少なくとも4インチである。コントローラは、少なくとも一つのセンサーによって検出される動作に対向しかつ正反対の動作に基づいてボディを位置調整するために、ロータリーモーターに対して制御信号を提供する。
【0010】
アクチュエータは、さらに、以下の特徴の一つ以上を含んでいてもよい。アクチュエータは第2のリンケージを含み、かつ、リンケージの一つは、このモーターの対向する側のそれぞれにおいてモーターの出力シャフトに対して接続される。ハウジングピボットピンならびに第1および第2リンクピボットピンのそれぞれはベアリング上で支持され、かつ、リンクは、ベアリングが実質的に同一平面上にあるように構成される。
【0011】
アクティブ振動抑制デバイスおよびアクチュエータは、有利なことには、ロータリーモーターを利用し、かつ、モーターの回転動作を直線動作へと変換するための機構を含む。アクチュエータは多くの用途を有するが、その一つは、直線経路に沿って物体のポジションを制御することである。アクチュエータ(この中でロータリーモーターが物体を位置調整するために機械式リンケージを介して作用する)は、リニアモーターを使用する公知の位置調整デバイスに対して、いくつかの利点を有する。たとえば、ロータリーモーターは、非常に安価に製造でき、しかもリニアモーターよりも容易に密閉できる。さらに、ロータリーモーターは、機械式リンケージと組み合わせることで、同等あるいはより大きな直線動作の範囲を提供しながら、リニアモーターよりも、よりコンパクトなサイズとすることができる。この特徴は、たとえば車両シートの振動抑制において重要であり、この場所は、シートと床との間のスペース(その中に制御機構が配置される)が制限される。
【0012】
さらに、コントローラと組み合わされた場合、アクチュエータは動作制御デバイスとして使用できる。たとえば、ある実施形態では、コントローラと組み合わされたアクチュエータは、内燃エンジンあるいはコンプレッサーにおいてバルブのアクティブ制御を実現するために使用できる。ある実施形態では、コントローラと組み合わされたアクチュエータは、位置決め源、速度源あるいは力源として機能するよう構成できる。ある実施形態では、コントローラと組み合わされたアクチュエータは、アクティブ振動抑制デバイスにおいて使用できる。たとえば、アクチュエータおよびコントローラは、以下でさらに説明するように、車両シートのポジションおよび/または加速度を制御するために、あるいは車両のバネ上質量(すなわち、パッセンジャーコンパートメントあるいは自動車)のポジションおよび/または加速度を制御するために使用できる。
【0013】
アクチュエータのその上さらなる利点は、機械式リンケージの少なくともいくつかがモーターハウジングおよびローターシャフトに組み込まれ、よりコンパクトで、複雑でなく、そしてより少ない部品しか必要としないアクチュエータが実現されることである。さらに、アクチュエータは、単一の剛体リンクを介して、そして位置調整制御に誤差および/または複雑さを導入する介在ギア、ベルトあるいはその他のデバイスを伴わずに、位置調整されることになる物体に対してローターが連結されるダイレクトドライブデバイスである。
【0014】
本発明のさらなる態様においては、回転動作を直線動作へと変換するための機構は、第1の回転軸線を画定するプレートピボットピンを含むプレートと、シャフトに固定された第1のリンクとを備える。シャフトはプレート上で回転可能に支持され、かつ、第2の回転軸線を画定し、この第2の回転軸線は第1の回転軸線と平行でありかつそれから離間している。第1のリンクは、第2の回転軸線から離れた位置に配置された第1のリンクピボットピンを含み、かつ、第1の回転軸線と平行な第3の回転軸線を画定する。本機構は、第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクを含む。第2のリンクは第1の回転軸線と平行な第4の回転軸線を画定する第2のリンクピボットピンを含み、第2のリンクピボットピンは、第2のリンクの第1の端部と第2のリンク上の所定のポイントとの間に配置される。本機構はさらに、プレートピボットピンに対して第1の端部において回動可能に連結され、かつ、第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクを含む。この機構においては、シャフトの回転によって、プレートに対する所定のポイントの直線動作が生じる。
【0015】
本機構は以下の特徴の一つ以上を含んでいてもよい。所定のポイントはシャフトの約180度回転に関して直線的に動作する。本機構は、第1のリンクピボットピンとシャフトとの間の距離によって規定される第1のバー長さと、シャフトとプレートピボットピンとの間の距離によって規定される第2のバー長さと、プレートピボットピンと第2のリンクピボットピンとの間の距離によって規定される第3のバー長さと、第1のリンクピボットピンと所定のポイントとの間の距離によって規定される第4のバー長さとを含み、第1のバー長さ対第2のバー長さ対第3のバー長さ対第4のバー長さの比率は、1:2:2.5:5である。プレートピボットピン、第1および第2のリンクピボットピンおよびシャフトのそれぞれはベアリング上で支持され、かつ、バーはベアリングが実質的に同一面上に存在するように構成される。プレートはさらに、プレートに対する第1のリンクの回転を制限するよう構成された停止部材を備える。
【図面の簡単な説明】
【0016】
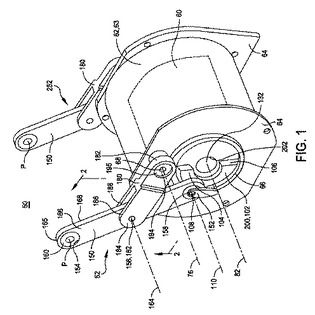
【図1】回転動作を直線動作へと変換するためのアクチュエータの斜視図である。
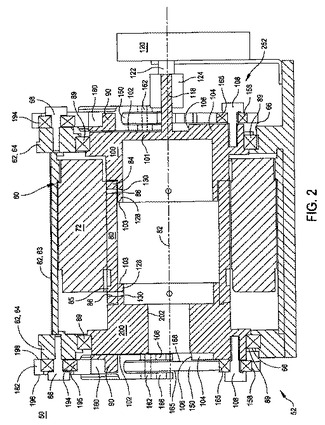
【図2】図1の切断線2−2に沿って見たときのアクチュエータの側断面図である。
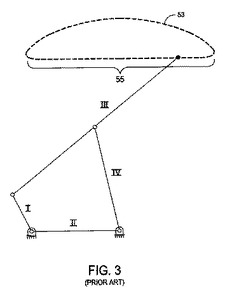
【図3】Hoekenのリンケージの概略図である。
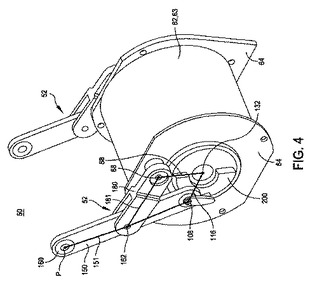
【図4】リンケージの4本のバーを示す図1のアクチュエータの斜視図である。
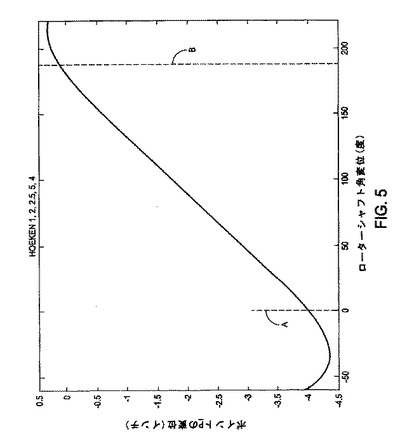
【図5】ローターシャフトの角変位(度)対第1のリンクの所定のポイントの変位(インチ)のグラフである。
【図6】図1のアクチュエータの端面図である。
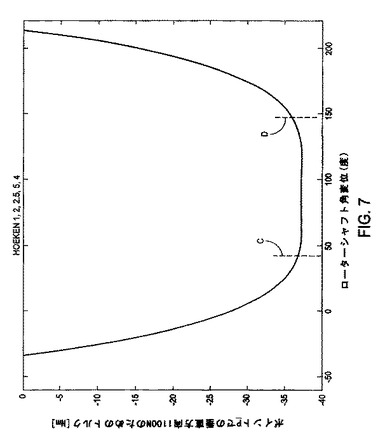
【図7】ローターシャフトの角変位(度)対第1のリンクの所定のポイントにおいて一定な1100N力を提供するために必要なモーターのトルク(Nm)出力のグラフである。
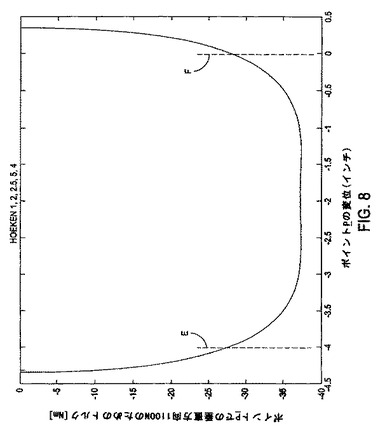
【図8】第1のリンクの第2の端部の変位(インチ)対第1のリンクの所定のポイントにおいて一定な1100N力を提供するために必要なモーターのトルク(Nm)出力のグラフである。
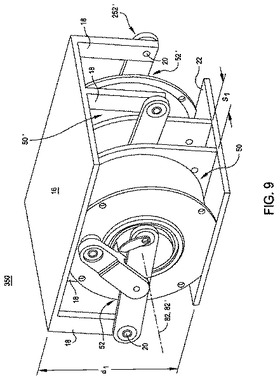
【図9】後退状態で示す二つのアクチュエータを用いるポジション制御デバイスの斜視図である。
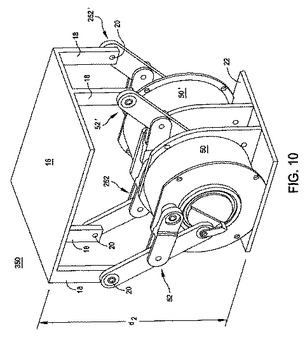
【図10】突出状態で示す図9のポジション制御デバイスの斜視図である。
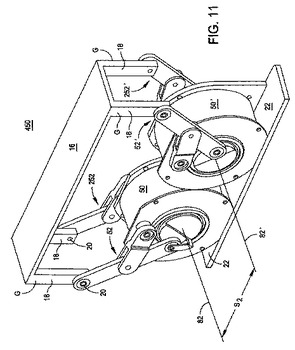
【図11】二つのアクチュエータを用いるポジション制御デバイスの代替実施形態の斜視図である。
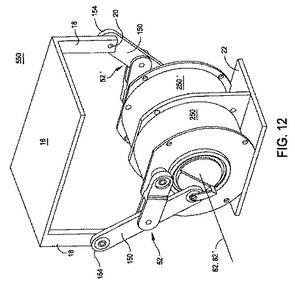
【図12】二つの単一リンケージアクチュエータを用いるポジション制御デバイスの別な代替実施形態の斜視図である。
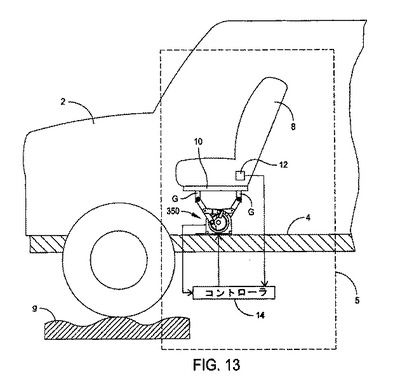
【図13】車両シートのためのアクティブ振動抑制システムの概略図である。
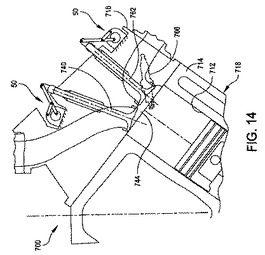
【図14】内燃エンジンのシリンダーバンクの一部の断面図であり、その内部では、図1のアクチュエータがエンジンバルブと直接的に連結されている。
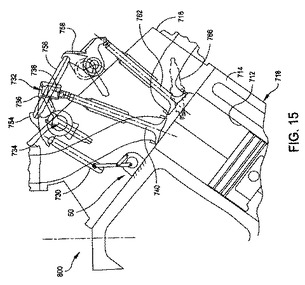
【図15】内燃エンジンのシリンダーバンクの一部の断面図であり、その内部では、図1のアクチュエータがエンジンバルブと間接的に連結されている。
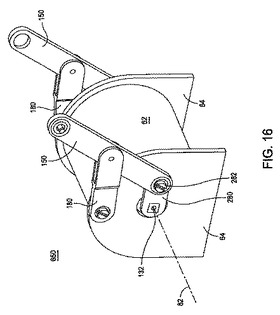
【図16】アクチュエータの代替形態の斜視図である。
【発明を実施するための形態】
【0017】
以下で詳しく説明するように、特定の機械的特性を有するリンケージと組み合わされたロータリードライバーを含むアクチュエータは、移動距離の直線範囲が制限されたスペース内で最大化される用途に好適な様式で、回転動作を直線動作へと変換する。
【0018】
図1、図2、図4、図6は、ロータリーモーターおよび4本バーリンケージの形態で、この所望の特性を有するアクチュエータを示している。このアクチュエータの代替実施形態は図16に示されている。図5、図7および図8は、ロータリーモーターの角変位に対するリンケージ上の所定のポイントの変位の比例関係を含むアクチュエータの機械的特性、両角変位に関する所定ポイントでの一定の力、ならびに、ロータリーモーターの一定トルク出力に関するリンケージ52の動作の直線部分における所定ポイントの変位を示している。位置決めデバイスとして使用された場合の、そうしたアクチュエータのいくつかの実施形態が図9ないし図12に示されている。特に、アクチュエータはプラットフォームに連結され、かつ、その動作を制御する。アクティブ振動抑制デバイスにおいて使用されるアクチュエータの実施形態は図13を参照して説明されている。さらに、エンジンバルブを制御するために使用されるアクチュエータの実施形態は図14および図15を参照して説明されている。
【0019】
ここで図1および図2を参照すると、回転動作を直線動作へと変換するためのアクチュエータ50は、モーターハウジング62によって支持されかつその中に配置されたロータリーモーター60を含む。アクチュエータは、モーター60の一端に連結され、かつ、それによって駆動される第1のリンケージ52を含む。リンケージ52は、Hoekenのリンケージとして構成されており、そして、直線経路に沿って、リンケージに連結された物体を位置調整するために使用できる。アクチュエータ50は、有利なことには、スペース内で物体を直線的に位置調整するためのコンパクトな解決策を提供する。
【0020】
図示する実施形態においては、物体の位置調整は単一のリンケージ52を用いて実現できるが、アクチュエータ50はさらに、モーター60の第2の端部に連結され、かつ、それによって駆動される第2のリンケージ252を含む。第2のリンケージ252は、第1のリンケージ52の鏡像であり、以下でさらに説明するように、第1のリンケージ52と同期的にかつそれと協働で動作するよう構成されている。両方のリンケージ52,252に共通の要素は同じ参照数字によって示している。したがって、各リンケージの構成は、第1のリンケージ52のみを参照して説明する。
【0021】
ロータリーモーター60は、ハウジング62に固定されたステータ72と、ローター軸線82を中心として回転可能であるようステータ72内に同軸状に配置されたローター80とを含む。ローター80は、ハウジング62上で回転可能に支持された対向する第1および第2端部84,85を有する中空円筒体である。ロータリーモーター60は、Port Washington, NYの、Bayside(登録商標)Motion Groupによって製造されたモデルK127300などの既存のフレームレスキットモーターであってもよい。
【0022】
ハウジング62は、ハウジングエンドプレート64によって各端部において蓋がされた密閉側壁63を含む。各端部プレート64は、ローター軸線8と平行な方向に外側に向かって延在し、ベアリング194を支持し、かつ、リンケージ52の第1の回転軸線76を画定するプレートピボットピン68を含む。図示する実施形態では、プレートピボットピン68は、したがって第1の回転軸線76は、回転軸線82の上に重なり、かつ、それと実質的に垂直に整列させられる。
【0023】
エンドキャップ100はローター80の第1の端部84に固定される。エンドキャップ100は、閉塞された第1の端部101を有する中空円筒体である。エンドキャップ100は、ハウジング60のエンドプレート64に形成された開口66内で回転可能に支持され、この結果、外面102は概してエンドプレート64の平面内に存在する。第1の端部101に隣接して、エンドキャップ100の外周面は、ハウジングエンドプレート64内に設けられたローターベアリング89によって支持されている。ローターベアリング89は、Mechatronics Corporation of Preston, Washingtonによって販売されているSilverthin(商標)モデルSB035アンギュラコンタクトベアリングなどの薄断面ベアリングであってもよい。
【0024】
エンドキャップ100は、外面102から内側に延在し、かつ、開放された第2の端部103において終端をなしている。エンドキャップ100の外径は第2の端部103において縮小しており、ローター80の内面内に圧入されるためのサイズとされた環状突起128を形成している。ローター80に対するエンドキャップ100の相対回転は、ローターに対してエンドキャップ100を固定することによって阻止される。これは、たとえば、ローター80および環状突起128にそれぞれ形成された相互に整列するネジ孔86,130内にネジ(図示せず)を設けることによって達成できる。したがって、エンドキャップ100はローター80と共に回転し、そしてモーター60の出力シャフトとして機能する。エンドキャップ100の回転中心132はローター軸線82と同軸であり、これは、リンケージ52の第2の回転軸線に対応する。
【0025】
エンドキャップ100の外面102は、円の一部の形状のエンドキャップ100の周面に形成された突出段部104を含むが、この一部の側面を画定する弦はエンドキャップ100の直径ではない。段部104を外面102の残部に接合するショルダー106が形成される。エンドキャップピン108が、エンドキャップ100の周面に隣接して段部104に設けられている。エンドキャップ108は段部104から外側に突出し、ベアリング158を支持し、そしてローター軸線82と平行に延在するリンケージ52の第3の回転軸線110を画定する。
【0026】
モーター60は、ローター80の角ポジションを測定するために外部光学エンコーダ120を含む。この実施形態では、エンコーダシャフト118は、ローター軸線82と同軸状に第1の端部101の外面102から突出している。エンコーダシャフト118は、フレキシブルカップリング124を用いて、エンコーダの入力シャフト122に接続されており、ローター80の角ポジションの正確測定を可能とするようになっている。だが、アクチュエータ50は、この形態に限定されるものではない。たとえば、モーター60は内部エンコーダを備えていてもよい。
【0027】
第2のエンドキャップ200はローター80の第2の端部85に対して固定される。第2のエンドキャップ200は、形状および機能に関して、第1のエンドキャップ100のそれと実質的に類似であり、第2のエンドキャップ200の同じ要素は同じ参照数字によって示している。こうした理由で、第1のエンドキャップ100に対する以下の差異、すなわちエンドキャップ200はエンコーダシャフト118を含まないことを指摘することを除いて、第2のエンドキャップ200の詳細な説明は省略する。エンドキャップ200は、ローター軸線82と同軸状に整列させられた貫通孔202を備える。貫通孔202はロータリーモーター60の内部に対するアクセスをもたらすが、これは、アクチュエータ50の組み立ておよび分解の間、有益である。
【0028】
上述したように、リンケージ52はHoekenのリンケージとして構成される。Hoekenのリンケージは、回転動作を概ね直線的な動作へと変換する4本バーリンケージである。図3を参照すると、Hoekenのリンケージは、回転する第1のバーIと、この第1のバーIを第4のバーIVに連結する固定された第2のバーIIと、第1のバーIによって一端において駆動される第3のバーIIIと、この第3のバーIIIの中間部分を支持する第4のバーIVとを含む。第1のバーIの回転によって、第3のバーIIIのポイントPは破線によって示す閉ループ経路53に沿って移動する。図から分かるように、この経路は実質的に直線部分55を含む。
【0029】
図4を参照すると、リンケージ52の4本のバーは以下のように規定される。
【0030】
リンケージ52の第1のバー116はエンドキャップ200によって提供される。さらに詳しく言うと、第1のバー116は、エンドキャップ200の回転中心132とエンドキャップピン108との間で延在するエンドキャップ200の一部を含む。第1のバー116は、エンドキャップ200の外面102に対応する平面内で第2の回転軸線82を中心として、ハウジング62に対して回転する。
【0031】
リンケージ52の第2のバー88はハウジング62によって提供される。さらに詳しく言うと、第2のバー88は、エンドプレート64の一部を含み、かつ、プレートピボットピン68とエンドキャップ200の回転中心132との間で延在する。第2のバー88は、ハウジング62に対する固定バーであり、かつ、リンケージ52によって生み出される直線動作の方向を規定する。
【0032】
リンケージ52の第3のバー151は第1のリンク150によって提供される。第1のリンクは、矩形断面の長尺な剛体バーであり、かつ、第1の端部152と、この第1の端部152とは逆側の第2の端部154とを含む。第1および第2の端部152,154、ならびに第1および第2の端部152,154間の中間ポイント156は、第1のリンク150の対向する主面166,168間で延在する貫通孔165を備える。ベアリング158,160(図示していない中間点ベアリング)は、個々の貫通孔165内に圧入されており、かつ、ピボットピンを受け入れるためのサイズおよび形状となっている。たとえば、第1のリンク150の第1の端部152のベアリング158はエンドキャップピン108を受け入れ、そしてハウジング62およびエンドプレート100に対するエンドキャップピン108(および第3の回転軸線110)を中心とする第1のリンク150の回転を可能とする。中間ポイント156に配置されたベアリングはリンクピン162を支持する。リンクピン162は、第1のリンク150の両主面166,168から外側に突出し、かつ、ローター軸線82と平行に延在するリンケージ52の第4の回転軸線164を画定する。第1のリンク150によって引き伸ばされて、リンケージ52の第3のバー151は、エンドキャップピボットピン108とベアリング160の中心線との間で延在している(これは図4のポイントPと一致する)。
【0033】
リンケージ52の第4のバー181は第2のリンク180によって提供される。第2のリンク180は、矩形断面の長尺な剛体バーであり、かつ、第1の端部82と、この第1の端部82の逆側の第2の端部184とを含む。第1の端部182は、第2のリンク180の対向する主面196,198間で延在する貫通孔195を備える。ベアリング194は、貫通孔195内に圧入されており、かつ、プレートピン68を受け入れるためのサイズおよび形状となっている。したがって、第2のリンク180の第1の端部182は、ハウジング62に対して、プレートピン68(および第1の回転軸線76)を中心として回転する。第2のリンク180の第2の端部184は分岐しており、したがって、第2の端部184における主面196,198間の距離は、第1の端部182におけるそれよりも大きく、かつ、第2の端部184は、第1のリンク150の中間部分にまたがりかつリンクピン162と係合する離間したヨークアーム186,188を含むヨークを形成している。したがって、第2のリンク180の第2の端部184は、ハウジング62および第1のリンク150に対して、リンクピン162(および第4の回転軸線)を中心として回転する。第2のリンク180によって引き伸ばされて、リンケージ52の第4のバー181は、プレートピボットピン68とリンクピン162との間で延在している。
【0034】
ヨークアーム186,188を用いて第2のリンク180を回動させることで、第2のリンク180の第1の端部182は、第1のリンク150と同じ平面内に存在するように配置できる。さらに、段部104によってエンドキャップ100を回動させることによって、そして段部104上にエンドキャップピン108を配置することによって、メインリンク150と、内側ヨークアーム188を収容できるハウジング64との間にスペースが設けられる。協働で、これらの特徴部は、有利なことには、ピボットピンベアリング158,160および194(これは既存のラジアルボールベアリングである)を単一の平面内に配置することを可能とするが、これによってリンクへの捩れ荷重が使用時に回避される。だが、リンケージ52はこの形態に限定されず、ある実施形態では、第2のリンク180はヨークを伴わずに形成されてもよく、そして、代わりに、オフセット部分を有するかあるいは直線形態を有するように形成されてもよい。
【0035】
リンケージ52はローター80の回転動作を、第1のリンク150上の所定のポイントPでの直線動作へと変換するのに使用される。図示する実施形態では、第1のリンク150の第2の端部154におけるベアリング160の中心は、直線動作が生み出される所定のポイントPとして規定される。それぞれの第1ないし第4のバー116,88,150,180の相対長さを調整することによって、ポイントPの動作を規定できる。アクチュエータ50においては、第1のバー長さは、エンドキャップピン108とエンドキャップ200の回転中心132との間の距離によって規定され、第2のバー長さはエンドキャップ200の回転中心132とプレートピン68との間の距離によって規定され、第3のバー長さはエンドキャップピン108とポイントPとの間の距離によって規定され、そして第4のバー長さはエンドキャップピン108とポイントPとの距離によって規定される。図示する実施形態では、バー長さは以下の通りである。第1のバー116は1インチであり、第2のバー88は2インチであり、第3のバー151は5インチであり、そして第4のバー181は2.5インチである。この構成を用いて実現される直線移動の範囲は約4インチである。もちろん、リンケージのバーのサイズを比例的に大きくすることで、増大した直線移動の範囲を実現できる。たとえば、1.25インチ、2.5インチ、6.25インチおよび3.125インチのぞれぞれの第1ないし第4のバー長さに関して、実現される直線移動の範囲は約5インチである。逆に、小さな直線移動の範囲が必要とされる用途に関しては、本機構はスケールダウン可能であり、この結果、さらにコンパクトなデバイスが実現される。
【0036】
リンケージ52に関して、第1のバー長さ対第2のバー長さ対第3のバー長さ対第4のバー長さの比率は、1:2:5:2.5である。こうした比率を用いることで、少なくとも以下のいくつかの利点が実現される。
【0037】
ポイントPの動作の直線部分は、固定された第2のバー88と平行なラインに沿って生じる。図示する実施形態では、固定された第2のバー88は垂直に向けられ、したがって、ポイントPの動作の直線部分はまた垂直動作を伴う。
【0038】
さらに、図5に示すように、ポイントPの動作は実質的に、ローター80の180度回転にわたってエンドキャップピン108の角変位に比例する。すなわち、ポイントPは、概ね180度の範囲に対応する、基準ラインAおよびBによって示すローター80の回転動作の範囲内で、概ね直線的に動作する。
【0039】
アクチュエータ50において、二つの外部リンク150,180が設けられるが、これは、それぞれ、Hoekenの4本バーリンケージの第3のものIIIおよび第4のもIVとして機能する。残る2本のバー(第1および第2のバーI,II)は、モーター60およびモーターハウジング62のコンポーネントによって提供される。さらに詳しく言うと、第1のバー116を包含する第2のエンドキャップ200はHoekenのリンケージの回転する第1のバーIとして機能し、そして第2のバー88を包含するモーターハウジング64はHoekenのリンケージの固定された第2のバーIIとして機能する。この形態(第1および第2のバー116,88が外部リンクとして形成されておらず、その代わりに、モーターアセンブリそれ自体に組み込まれている)は、所望の動作を実現するために必要なコンポーネントの数を低減し、この結果、コンパクトなアクチュエータアセンブリを実現する。
【0040】
ここで図6を参照すると、アクチュエータ50は、第1のリンク150の第2の端部154が、図5のAおよびB間で規定される直線動作範囲内で前後に動作するよう構成されている。ある実施形態では、モーター60に対して接続されたコントローラ14(図3)が、ローター80が、したがってエンドキャップ100が、180度の範囲を超えて回転するのを阻止する。さらに、停止部材90が、外面102のショルダー106と機械的に干渉するように設けられ、これによって直線範囲を超える回転が阻止される。停止部材90はハウジング62に対して固定され、かつ、エンドプレート64の開口66の一部と重なるように半径方向内側に延在する。リンケージが直線範囲の一端に対応する完全突出形態にあるとき(図4に実線で示す)、ショルダー106の第1の部分は停止部材90の第1の停止面96に当接する。このポジションでは、第1のリンク150の第1の端部152は、図を見たとき、ローター軸線82の左側の位置でローター軸線82を通る水平ライン上に配置される。さらに、図を見たとき、ポイントPは、ハウジング62に対して横方向でかつその上面の上方のポジションに置かれている。エンドキャップ100が反時計回りに回転するとき、リンケージ52は下方に動作し、そしてポイントPは直線経路Lに沿って下方に移動する。リンケージ52が直線範囲の逆端に対応する後退ポジションにあるとき(図4において破線で示す)、ショルダー106の第2の部分は停止部材90の第2の停止面98に当接する。このポジションでは、第1のリンク150の第1の端部は180度円弧を経て回転してしまっており、いまや、図を見たときに、ローター軸線82の右側の位置でローター軸線を通る水平ライン状に配置される。さらに、ポイントPは、いまや、ハウジング62の横方向でかつその上面の下方のポジションに置かれている。
【0041】
さらに有利なことには、図7に示す一実施形態において、4本バーリンケージ52は、ポイントPにおいて一定の1100Nの力を提供するために必要なモーター60のトルク出力は、ポイントPの直線移動範囲と関連付けられたモーターの角変位範囲のほとんどにわたって実質的に一定であるように、ローター80の回転動作を直線動作へと変換するよう構成される。モーター60のトルク出力は、約100度の範囲に対応する、基準ラインCおよびDで示すローター80の回転動作の範囲内で実質的に一定である。
【0042】
さらに、図8に示す一実施形態において、4本バーリンケージ52は、ポイントPにおいて一定の1100Nの力を提供するために必要なモーター60のトルク出力は、ポイントPの動作の直線範囲のほとんどにわたって実質的に一定であるように、ローター80の回転動作を直線動作へと変換するよう構成される。モーター60のトルク出力は、約4インチに対応する、基準ラインEおよびFで示すチップ直線変位の範囲の大部分にわたって実質的に一定である。
【0043】
図9および図10を参照すると、ポジション制御デバイス350はアクチュエータ50の一実施形態であり、このデバイス350は、個々のロータリーモーター60,60'のローター軸線82,82'が実質的に同軸であるように配置された二つのアクチュエータ50,50'を含む。さらに、第1のアクチュエータ50のリンケージ52,52'は、第2のアクチュエータ50'のリンケージ52',252'とは反対の方向に回転するよう構成される。
【0044】
図示する実施形態では、ポジション制御デバイス350は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の下方に延在する脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持される。図9において、ポジション制御デバイス350は、第1の後退した状態で示されているが、ここでは、プラットフォーム16とベース22との間の垂直距離は距離d1である。この実施形態では、プラットフォーム16とハウジング62,62'との間には垂直間隔は実質的に存在せず、この結果、後退した形態は非常にコンパクトである。さらに、プラットフォーム16は実質的にポジション制御デバイス350の上に中心が置かれている。図10において、ポジション制御デバイス350は、第2の突出した状態で示されているが、ここで、プラットフォーム16とベース22との間の垂直距離は距離d2であり、このd2はd1よりも大きい。プラットフォーム16は、後退および突出状態間での移行の間、そして突出状態にある間、ポジション制御デバイス350の上に中心が置かれたままである。図示する実施形態は、軸方向に距離s1だけ離間したアクチュエータ50,50'を示しているが、この形態は限定ではない。たとえば、二つのアクチュエータ50,50'は、s1よりも大きいかあるいは小さな距離だけ離間していてもよい。
【0045】
図11を参照すると、ポジション制御デバイス450はアクチュエータ50の代替実施形態である。先のポジション制御デバイス350と同様、ポジション制御デバイス450は二つのアクチュエータ50,50'を含むが、第2のアクチュエータ50'は第1のアクチュエータ50と同一である。ポジション制御デバイス450において、アクチュエータ50,50'は、それぞれのロータリーモーター60,60'のローター軸線82,82'が平行でかつ離間しているように配置される。さらに、第1のアクチュエータ50のリンケージ52,252は、第2のアクチュエータ50'のリンケージ52',252'とは逆方向に回転するよう構成される。図示する実施形態では、ポジション制御デバイス450は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の下方に延在する脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持されている。図示する実施形態は、距離s2だけ離間したアクチュエータ50,50'の軸線82,82'を示しているが、この形態は限定ではない。たとえば、軸線82,82'は、s2よりも大きいかあるいは小さな距離だけ離間していてもよい。さらに、図示する実施形態は同一面上にあるアクチュエータ50,50'を示しているが、アクチュエータは、これに代えて、平行軸線82,82'を維持しながら、異なる平面内に存在するようオフセットしていてもよい。
【0046】
図12を参照すると、ポジション制御デバイス550はアクチュエータ50の代替実施形態である。ポジション制御デバイス550は二つのシングルリンケージアクチュエータ250,250'を含む。特に、各アクチュエータ250,250'は単一のリンケージ52,52'を備える。ポジション制御デバイス550において、アクチュエータ250,250'は、それぞれのロータリーモーター60,60'のローター軸線82,82'が同軸であるように配置される。さらに、第1のアクチュエータ250のリンケージ52は、第2のアクチュエータ250'のリンケージ52'とは逆方向に回転するよう構成される。図示する実施形態では、ポジション制御デバイス550は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持されている。ポジション制御デバイス550は、ポジション制御デバイス350と同様に機能するが、より簡素であり、より少ないベアリングしか必要とせず、そしてポジション制御デバイス350よりも軸方向によりコンパクトである。図示する実施形態は、軸方向に当接する二つのアクチュエータ250,250'を示しているが、この形態は限定ではなく、アクチュエータ250,250'は軸方向に離間していてもよい。
【0047】
上記ポジション制御デバイス350,450,550のそれぞれに関して、向き合う側に配置されたリンケージ機構を使用することによって、アクチュエータ50が調和して動作する場合、荷重によるベース22におけるそれぞれの反作用トルクは著しく低減される。さらに、単一のロータリーモーター60ではなく、プラットフォーム16を位置調整するために二つのロータリーモーター60,60'を用いることによって、二つのロータリーモーター60,60'のそれぞれはサイズを低減でき、この結果、さらにコンパクトな機構が実現される。さらに、ある実施形態においては、それぞれのリンケージ52,252,52',252'は、プラットフォーム16がロータリーモーター60,60'の一つが故障した場合に水平状態を維持できるように、機械的に互いに結束されてもよい。
【0048】
図13を参照すると、ポジション制御デバイス350は、車両フレーム4の振動に由来する車両シート8の振動を軽減するかあるいは排除するために、車両2において使用されるアクティブ振動抑制デバイスにおいて使用されてもよい。車両シート8は剛体シートベース10に対して固定され、かつ、少なくとも一つのセンサー12を支持する。たとえば、センサー12は、地面gに対するシートの動きを検出するための加速度計を含んでいてもよい。シート8およびベース10は、車両フレーム4の上に載っており、かつ、ポジション制御デバイス350によって、その上で支持される。ポジション制御デバイス350は、補助シートサポート構造体を介して、車両フレームに対して間接的に取り付けられても、あるいはフレームそれ自体に対して直接取り付けられてもよく、これによって、ポジション制御デバイス350は車両フレーム4に対して固定される。ポジション制御デバイス350は、コントローラ14から受け取った制御信号に基づいて、車両フレーム4に対して、ベース10を、したがってシート8を位置調整する役割を果たす。コントローラ14は、センサー12からのシート動作データを含む信号、およびハウジング62,62'に対するローターポジションを指し示すエンコーダ信号を受け取る。こうした信号に基づいて、コントローラ14は、車両シート8のポジションが車両フレームに対して制御されるように、ポジション制御デバイス350のロータリーモーター60,60'に対して制御信号を出力する。図示する実施形態はポジション制御デバイス350を採用するが、これは限定ではない。たとえば、デバイス350の代わりに、開示されたポジション制御デバイス450,550のいずれかを用いることもできる。さらに、単一のアクチュエータ50,250は、アクティブ振動抑制デバイスを形成するために、補助シートサポート構造体と組み合わせて使用することができる。
【0049】
ある実施形態では、個々のロータリーモーター60,60'は、車両の振動から車両シート8を切り離すために、検出されたシート挙動をキャンセルするために、ベース10を、したがってシート8を位置調整するために制御される。ある実施形態では、個々のロータリーモーター60,60'は、協働して動作するように制御される。たとえば、車両フレーム4からの両アクチュエータ50,50'の第1のリンク150の第2の端部154の距離が同一となるように制御される。別な実施形態においては、第1のアクチュエータ50のロータリーモーター60は第2のアクチュエータ50'のロータリーモーター60'とは別個に制御されてもよく、これによって、車両フレーム4に対するシートベース10の姿勢を制御することができる。そうした実施形態においては、リンケージ52,252,52',252'とシートベース10との間に、これらコンポーネント間の相対動作を可能とするために、少なくとも一つの付加的自由度が必要となるであろう。これは、たとえば、位置Gに付加的ピボットポイントを設けることによって実現できる。
【0050】
アクティブ振動抑制デバイス5(これは、ロータリーモーター60,60'からの回転動作出力を直線動作へと変換するためにアクチュエータ50を利用する)は、リニアモーターを使用する制御システムに対して、複数の利点を有する。たとえば、ロータリーモーターは、安価に製造でき、かつ、リニアモーターよりも容易に密閉できる。さらに、ロータリーモーターは、機械式リンケージと組み合わせることで、同等あるいはより大きな直線動作の範囲を提供しながら、リニアモーターよりも、よりコンパクトなサイズとすることができる。この特徴は、たとえば車両シートの振動抑制において重要であり、この場所は、シートと床との間のスペース(その中に制御機構が配置される)が制限される。アクチュエータのその上さらなる利点は、機械式リンケージの少なくともいくつかがモーターハウジングおよびローターシャフトに組み込まれ、よりコンパクトで、複雑でなく、そしてより少ない部品しか必要としないアクチュエータが実現されることである。
【0051】
さらに、ある実施形態では、アクチュエータ50は、ダイレクトドライブデバイスであってもよく、この場合、ローターが単一の剛体リンクを介して、そして介在ギア、ベルト、あるいは位置調整制御に誤差および/または複雑さを導入する、その他のデバイスを伴わずに、位置調整されるべき物体に対して連結される。
【0052】
さらに、アクティブ振動抑制デバイス5においてポジション制御デバイス350を使用することの、さらなる利点は、ロータリーモーターがリニアモーターよりも本質的により効率がよいという事実にある。たとえば、リニアモーターにおいて有用であろう三つの異なるアーマチュア/ステータ関係が存在する。1)磁石が前後に動くとき、アーマチュアは、移動量の少なくともある範囲に関して、ステータ極内に留まるように、アーマチュア磁石の長さを超えてステータのコイルおよび極が延在するアンダーハング関係。この設計は、最大可動域においてアーマチュアが依然としてコイル内に留まるものであってもよく、あるいは、それは、ある時点で、それらを超えて突出し始めよい。2)アーマチュア磁石がステータ極と同じ長さであるイーブンハング設計。この設計では、アーマチュアが動き始めるや否や、いくつかの磁石はステータ極の外側に移動する。3)アーマチュア磁石がステータ極の長さを超えるオーバーハング関係。このオーバーハング設計では、アーマチュアの動作は、少なくともある可動範囲にわたって、ステータ極内に存在する磁石の量を変化させない。この設計では、全可動範囲を、あるいはその一部のみを使用できる。
【0053】
上記関係のいずれかに関して、効率とコストとの間にトレードオフが成り立つ。たとえば、いくつかの磁石がステータ極の外側に動くや否や、力出力に対するその寄与率は急激に低減する。比較的高い磁石の費用のために、常時、磁石を最大限に利用することが望ましい。
【0054】
アクティブシート振動抑制用途に見られるような限定されたスペース状況において使用される場合、そしてたとえばアンダーハング設計を利用する場合、磁石を最大限に利用することが可能である。だが、固定入力電流に関して可動範囲の大部分にわたって生み出される力の大きさは、より多くの磁石が使用された場合よりも小さくなる。したがって、リニアモーターの効率は低減する(ここで、効率は入力電力で割った機械的出力として規定される)。イーブンハング設計は、これらの要素間でのトレードオフである。
【0055】
リニアモーターではなくロータリーモーターを使用する利点は、全ての磁石が全ての回転角度に関してステータの極に面することはロータリー設計において特有である、ということである。これは、効率およびコストのトレードオフに関して最適条件である。こうした理由で、直線的位置調整用途のために、リニア・アクチュエータではなく、ロータリーモーターおよび回転動作を直線動作へと変換するための機構を使用することは有益である。
【0056】
図示する実施形態は、車両シートの振動を積極的に抑制するために使用される、回転動作を直線動作へと変換するためのアクチュエータ50を示しているが、アクチュエータ50はこうした用途に限定されない。たとえば、アクチュエータ50はまた、ホイールサスペンションシステムおよびエンジン振動抑制システムを含む車両振動抑制のその他の態様における使用にも好適である。さらに、アクチュエータ50は振動抑制に限定されず、物体のポジション制御に対する広範な用途を有する。たとえば、アクチュエータはエンジンバルブ動作を制御するために使用でき、これによってエンジン効率を改善できる。
【0057】
ここで、図14を参照すると、アクチュエータ50は、従来のカムシャフト駆動バルブトレーンに代えて、エンジンバルブポジションを制御するために内燃エンジン700において使用されてもよい。エンジン700は、シリンダーバンク714を形成するためにV形状に配置されたシリンダーブロック718内に配置された複数のシリンダー712を有し(一つのシリンダーしか示していない)、シリンダー712の上側端部はシリンダーヘッド716によって閉塞されている。一対の吸気バルブ740(その一方しか図示していない)はシリンダー712およびその関連する燃焼チャンバー744のインナー側において長手方向に整列させられており、そして排気バルブ762がシリンダー712のアウター側に配置されている。スパークプラグ766あるいは類似のデバイスの形態の点火具がまた、各シリンダー712の燃焼チャンバー744内に配置されている。
【0058】
アクチュエータ50は各吸気および排気バルブ740,762に関して設けられ、そして第1のリンク150の所定のポイントPは対応するバルブシステムに対して回動可能に連結される。アクチュエータ50は、コントローラ(図示せず)から受け取った制御信号に基づいて、シリンダーブロック718に対して吸気および排気バルブ740,762を位置調整する役割を果たす。コントローラは、ハウジング62に対するローターポジションを指し示すエンコーダ信号からのバルブ動作データ、およびクランクシャフトデータを含む信号を受け取る。これらの信号に基づいて、コントローラはアクチュエータ50のロータリーモーター60に対して制御信号を出力し、これによって、バルブ740,762のポジションはシリンダーブロック718に対して制御される。
【0059】
図15を参照すると、別な実施形態では、アクチュエータ50はそれぞれの吸気および排気バルブ740,762に対して間接的に連結されてもよい。たとえば、第1のリンク150の所定のポイントPは吸入プッシュロッド730に連結できる。プッシュロッド730は、ピボット軸734上で揺動する吸気ロッカーアーム732を動作させる。ロッカーアーム732は一対の作動アーム736を含むが、そのそれぞれは、好ましくは、油圧ラッシュアジャスター738を支持する。ラッシュアジャスター738は一対の吸気バルブ740と係合する。この図ではアクチュエータ50および吸気プッシュロッド730bによって隠れているが、別なアクチュエータ50が一次ロッカーアーム754を作動させるために排気プッシュロッドに連結されており、これは、吸気ロッカーアーム732と同じピボット軸734上で回動可能である。一次ロッカーアーム754は、今度は、二次ロッカーアーム758と係合する二次プッシュロッド756と係合する。ロッカーアーム758の作動アームは、直接、排気バルブ762と係合する。先の実施形態と同様、アクチュエータ50は、コントローラ(図示せず)から受け取った制御信号に基づいて、シリンダーブロック718に対して吸気および排気バルブ740,762を位置調整する役割を果たす。コントローラは、ハウジング62に対するローターポジションを指し示すエンコーダ信号からのバルブ動作データ、およびクランクシャフトデータを含む信号を受け取る。これらの信号に基づいて、コントローラはアクチュエータ50のロータリーモーター60に対して制御信号を出力し、これによって、バルブ740,762のポジションはシリンダーブロック718に対して制御される。
【0060】
ここに示すエンジンバルブポジション制御機構は、シリンダー712の各エンジンバルブ740,762のためにアクチュエータ50を備えるが、これは限定ではない。たとえば、単一のアクチュエータ50を複数のバルブを制御するために使用できる。たとえば、単一のアクチュエータは、単一の燃焼チャンバーに組み合わされた複数の吸気バルブを同時に作動させることができる。
【0061】
バルブ動作を制御するためにアクチュエータ50を使用することは、有利なことには、バルブの動作をエンジンクランクシャフトの回転から切り離すことを可能とする。さらに、完全に制御可能なバルブは、エンジン速度の全範囲にわたって、タイミングおよびリフトの完全な制御を可能とする。これは、全運転条件にわたってバルブ動作を最適化することを可能とする。それはまた、運転の変更を可能とし、エンジン効率モードにおける、あるいは最大パワー供給モードにおける運転を可能とする。それはエンジンシリンダーの非作動化を容易にし、そして、より複雑な非作動化スキームを可能とする。たとえば、現在の手法のように全シリンダーバンクを非作動化するのではなく、シリンダーバンクの一部あるいは別個のシリンダーを非作動化することができる。さらに、バルブ動作を制御するためのアクチュエータ50の使用は、クランクシャフトを回転させるための別個のスターターを要さずに、エンジンのセルフスタートを可能とする。
【0062】
アクチュエータ50を含む、ここで説明したエンジンバルブ制御システムの使用は、移動量の直線範囲が制限されたスペース内で最大化される、この用途に好適な様式で、回転動作の直線動作への変換を実現する。たとえば、バルブシャフトと整列状態で配置されかつバルブステムから上方に突出する必要があるリニア・アクチュエータとは異なり、アクチュエータ50は、バルブの一方側に対する位置から、随意に、バルブリフトプロファイルを制御でき、したがって、バルブトレーンに対して高さを付加しない。バルブの側方に対するアクチュエータ50の位置は、レバーあるいはロッカーアームを要さずに、バルブの直線変位を提供でき、これは、バルブガイドの摩擦損失および磨耗を著しく低減できる。
【0063】
この特徴は、アクチュエータ50のコンパクトなサイズと組み合わされて、シリンダー当たり複数のバルブが採用された場合に、各バルブの完全な制御を実現しながら、複数のアクチュエータをシリンダーの周囲に設置するか、あるいはシリンダーの周面の回りに離間して配置することができるように、アクチュエータのパッケージングを可能とする。
【0064】
アクチュエータ50は、バルブポジションを制御するためにリンケージを介して作用するロータリーモーター60を利用するので、アクチュエータ50はシリンダーヘッド716から離れて配置できる。これは有利である。なぜなら、これは、アクチュエータ50およびセンサーがシリンダー排気バルブおよびマニホールドに関連する高温を回避することを可能とするからである。これは、熱消磁温度に達する前にアクチュエータのコイル内で消散できる電力量を増大する。さらに、アクチュエータモーターはバルブ自体から離れて配置されるので、冷却デバイスの設計は簡素化される。たとえば、他の構造体と干渉することなく、アクチュエータモーターの全てを取り囲む冷却ジャケットを設けることができる。
【0065】
アクチュエータ50において、ローターエンコーダ120がポジションを検出するために使用される。このセンサーは、バルブの位置から離れて、ロータリーモーター60と共に配置される。ロータリーエンコーダ120は、リニアポジション・速度センサーよりも、安価であり、かつ、信頼性が高い。それはまた、低温であると思われるポジションに配置することができる。アクチュエータ50はロータリーモーター60を利用するので、バルブポジションおよび速度を検出するための信頼性の高いセンサーの設計および製造は相対的に簡単である。
【0066】
アクチュエータ50はロータリーモーターを利用するので、当該デバイスはエンジン700でに使用に好適である。なぜなら、高いエンジン速度では、シリンダークラッキング圧力に打ち勝つと共に排気バルブを開くために、かなりのピークパワーが必要となるからである。この要求はシステムのパワーエレクトロニクスに極度の要求を課し、そしてさらに、アクチュエータにおける最大効率に関する必要性を生じさせる。上述した理由から、ロータリーモーターは、たとえばリニアモーターを利用するアクチュエータよりも、本質的により効率がよい。ロータリーモーターの相対効率はモーターそれ自体をことによるとダウンサイズするために、あるいは電力要求を低減するために、あるいは両方のために利用できる。
【0067】
パッケージングの観点から、ロータリーモーター60およびリンケージ52を含むアクチュエータ50は、リニアモーターよりも小さな断面を有し、そしてモーターとバルブとに間のリンケージ接続によって、アクチュエータは、ロータリーモーターがバルブの上に直に載らないように、バルブトレーンと一体化できる。たとえば、アクチュエータ50はV型エンジンのシリンダーバンク間に配置できる。さらに、別体リンケージ(必要ならば)が、リンケージ52のポイントPをバルブに対して接続できる。アクチュエータのロータリーモーターをバルブから離れて配置することによって、シリンダーシステム当たりの積極的に制御される複数のバルブをパッケージするのが、一層容易なものとなる。
【0068】
バルブシートとのバルブの衝突が生じるのを避けるために正確な制御が必要とされる。トルクとアクチュエータ50によって得られるポジションとの間の特定の関係は、エンジンバルブの制御を簡素化する。
【0069】
図16を参照すると、アクチュエータ650はアクチュエータ50の代替実施形態である。アクチュエータ650は実質的にアクチュエータ50と類似しているが、アクチュエータ50のエンドキャップ100,200は組み立ての容易性を改善するために改変されている点で相違する。特に、改変されたエンドキャップ(図示せず)は低減された外径を有するように形成されており、かつ、エンドキャップ100,200を支持する大径ローターベアリング89は、より小さな直径の類似のベアリングによって置き換えられている。改変されたエンドキャップの低減された直径によって、4本バーリンケージの第1のバー116に対応すると共に相応の寸法とされた第3のリンク280が提供される。
【0070】
図示する実施形態は特定のモーターおよびベアリングを使用するものとして説明されているが、本発明はこうしたコンポーネントに限定されるものではなく、モーターおよびベアリングは、特定の用途の要求に基づいて選択されることは明らかである。
【0071】
回転動作を直線動作へと変換するための機構の選択された例証的実施形態を詳しく説明した。だが、ここでは、本発明を明確にするために必要と考えられる一つの構造を説明したに過ぎないことに留意されたい。その他の既存の構造、およびシステムの付属的かつ補助的コンポーネントのそれは、当業者には公知でありかつ理解されると考えられる。さらに、本発明の役立つ実例を説明してきたが、本発明は上述した役立つ実例には限定されず、さまざまな設計変更を特許請求の範囲に記載した本発明から逸脱することなく実施可能である。
【符号の説明】
【0072】
50 アクチュエータ
52 第1のリンケージ
60 ロータリーモーター
62 モーターハウジング
63 密閉側壁
64 ハウジングエンドプレート
66 開口
68 プレートピボットピン
72 ステータ
76 第1の回転軸線
80 ローター
82 第2の回転軸線
84 第1の端部
85 第2の端部
86 ネジ孔
88 第2のバー
89 ローターベアリング
90 停止部材
100 エンドキャップ
101 第1の端部
102 外面
103 第2の端部
104 突出段部
106 ショルダー
108 エンドキャップピン
110 第3の回転軸線
116 第1のバー
118 エンコーダシャフト
120 外部光学エンコーダ
122 入力シャフト
124 フレキシブルカップリング
128 環状突起
130 ネジ孔
132 回転中心
150 第1のリンク
151 第3のバー
152 第1の端部
154 第2の端部
156 中間ポイント
158,160 ベアリング
162 リンクピン
164 第4の回転軸線
165 貫通孔
166,168 主面
180 第2のリンク
181 第4のバー
182 第1の端部
184 第2の端部
186,188 ヨークアーム
194 ベアリング
195 貫通孔
196,198 主面
200 第2のエンドキャップ
202 貫通孔
252 第2のリンケージ
【技術分野】
【0001】
本発明は、回転動作を直線動作に変換するための機構を含むアクチュエータに関する。
【背景技術】
【0002】
アクティブ振動抑制システムが、車両シートの振動を抑制するために採用されている。たとえば、車両振動に対するシートの応答を低減するスプリングおよびダンパーを含むパッシブシステムの代わりに、アクティブ振動抑制システムは、シートの振動を検出し、検出された動作をキャンセルするためにシートのポジションを制御し、これによってシートを車両の振動から切り離す。そうしたアクティブ振動抑制システムは、コントローラによって制御されるリニア・アクチュエータを含むことがある。このリニア・アクチュエータは、車両のフレームに対するシートポジションを制御するためにシートの下に配置される。たとえば、リニア・アクチュエータは、一端においてシートに固定されたアーマチュアを含む、リニア電磁石モーターを含むことがある。このアーマチュアは、コントローラからの制御信号に基づいて、ステータに対して直線的に突出・後退し、これによってシートを位置調整する。
【0003】
制御されたリニア・アクチュエータは、車両シート振動抑制以外のシステムに対する用途を有する。たとえば、制御されたリニア・アクチュエータはまた、車輪サスペンションシステムにおいて、そしてエンジンバルブ制御システムにおいて使用されることも知られている。
【0004】
多くの用途において、物体のポジションを制御するために、そうしたリニア・アクチュエータを使用することに関連する課題は、たとえばアクティブ振動抑制システムにおけるシートと床との間の制限されたスペース内で十分な直線移動距離を実現するリニアモーターを提供することを含む。別な課題は、リニアモーターに関連する公知のコストおよびメンテナンス問題を含む。
【発明の概要】
【課題を解決するための手段】
【0005】
ある態様では、ボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスは、少なくとも一つの方向へのボディの移動に対応する入力信号を提供するよう構成された少なくとも一つのセンサーと、ボディのポジションを制御するよう構成されたロータリーモーターと、ロータリーモーターをボディに連結する少なくとも二つの回動可能に連結されたリンクを備えるリンケージとを含む。このリンケージは、モーターからの回転動作出力をボディの直線動作へと変換するよう構成される。本デバイスはさらに、コントローラであって、少なくとも一つのセンサーからの入力信号に基づいて、少なくとも一つの方向へボディを位置調整するためにリンケージを介して作用するロータリーモーターに制御信号を提供するコントローラを含む。
【0006】
本発明の別な態様では、アクチュエータは、出力シャフトおよびモーターハウジングを含むロータリーモーターと、このロータリーモーターの出力シャフトに接続されたリンケージとを備える。リンケージは、第1の回転軸線を形成するハウジングピボットピンと、出力シャフトに固定された第1のリンクとを有するモーターハウジングを含む。出力シャフトは第2の回転軸線を形成し、かつ、第2の回転軸線は第1の回転軸線と平行でありかつそれから離間させられている。第1のリンクは、第2の回転軸線から離間させられた位置に配置された第1のリンクピボットピンを含み、かつ、第1の回転軸線と平行な第3の回転軸線を画定する。リンケージは、第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクを含む。第2のリンクは、第1の回転軸線と平行な第4の回転軸線を形成する第2のリンクピボットピンを含む。この第2のリンクピボットピンは第2のリンクの第1の端部と第2のリンクの所定のポイントとの間に配置されている。リンケージはさらに、ハウジングピボットピンに対して第1の端部において回動可能に連結され、かつ、第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクを含む。アクチュエータの作動中、出力シャフトの回転は、ハウジングに対する所定ポイントの直線動作を生じる。
【0007】
アクティブ振動抑制デバイスおよびアクチュエータは、以下の特徴の一つ以上を含んでいてもよい。ボディにおいてモーターによって生み出されるトルクは、出力シャフトの100度の角回転にわたって実質的に一定である。リンケージは、ボディの動作が出力シャフトの180度の回転にわたって出力シャフトの角変位に実質的に比例するように、モーターの出力シャフトの回転動作を直線動作へと変換するよう構成される。リンケージは、トルクが少なくとも4インチのボディの変位の範囲にわたって実質的に一定であるように、出力シャフトの回転動作を直線動作へと変換するよう構成される。
【0008】
アクティブ振動抑制デバイスのコントローラは、制御されるボディの姿勢といったボディを位置調整するためにリンケージを介して作用するロータリーモーターに対して出力信号を提供する。アクティブ振動抑制デバイスは第2のリンケージを備え、当該リンケージの一つはモーターの対向する側のそれぞれにおいてモーターの出力シャフトに連結されている。本デバイスはさらに、第2のロータリーモーターと、ボディのポジションを制御するよう構成された第2のリンケージとを備え、第1および第2のロータリーモーターは、その個々のローター軸線が平行であるように配置される。当該デバイスはさらに、第2のロータリーモーターと、ボディのポジションを制御するよう構成された第2のリンケージとを含み、第1および第2のロータリーモーターは、その個々のローター軸線が共直線状であるように配置される。
【0009】
ある実施形態では、ボディは、たとえば車両内に配置された車両シートを含み、車両の床に対して固定されたロータリーモーターは、床とシートとの間に配置される。ボディの直線移動距離は少なくとも4インチである。コントローラは、少なくとも一つのセンサーによって検出される動作に対向しかつ正反対の動作に基づいてボディを位置調整するために、ロータリーモーターに対して制御信号を提供する。
【0010】
アクチュエータは、さらに、以下の特徴の一つ以上を含んでいてもよい。アクチュエータは第2のリンケージを含み、かつ、リンケージの一つは、このモーターの対向する側のそれぞれにおいてモーターの出力シャフトに対して接続される。ハウジングピボットピンならびに第1および第2リンクピボットピンのそれぞれはベアリング上で支持され、かつ、リンクは、ベアリングが実質的に同一平面上にあるように構成される。
【0011】
アクティブ振動抑制デバイスおよびアクチュエータは、有利なことには、ロータリーモーターを利用し、かつ、モーターの回転動作を直線動作へと変換するための機構を含む。アクチュエータは多くの用途を有するが、その一つは、直線経路に沿って物体のポジションを制御することである。アクチュエータ(この中でロータリーモーターが物体を位置調整するために機械式リンケージを介して作用する)は、リニアモーターを使用する公知の位置調整デバイスに対して、いくつかの利点を有する。たとえば、ロータリーモーターは、非常に安価に製造でき、しかもリニアモーターよりも容易に密閉できる。さらに、ロータリーモーターは、機械式リンケージと組み合わせることで、同等あるいはより大きな直線動作の範囲を提供しながら、リニアモーターよりも、よりコンパクトなサイズとすることができる。この特徴は、たとえば車両シートの振動抑制において重要であり、この場所は、シートと床との間のスペース(その中に制御機構が配置される)が制限される。
【0012】
さらに、コントローラと組み合わされた場合、アクチュエータは動作制御デバイスとして使用できる。たとえば、ある実施形態では、コントローラと組み合わされたアクチュエータは、内燃エンジンあるいはコンプレッサーにおいてバルブのアクティブ制御を実現するために使用できる。ある実施形態では、コントローラと組み合わされたアクチュエータは、位置決め源、速度源あるいは力源として機能するよう構成できる。ある実施形態では、コントローラと組み合わされたアクチュエータは、アクティブ振動抑制デバイスにおいて使用できる。たとえば、アクチュエータおよびコントローラは、以下でさらに説明するように、車両シートのポジションおよび/または加速度を制御するために、あるいは車両のバネ上質量(すなわち、パッセンジャーコンパートメントあるいは自動車)のポジションおよび/または加速度を制御するために使用できる。
【0013】
アクチュエータのその上さらなる利点は、機械式リンケージの少なくともいくつかがモーターハウジングおよびローターシャフトに組み込まれ、よりコンパクトで、複雑でなく、そしてより少ない部品しか必要としないアクチュエータが実現されることである。さらに、アクチュエータは、単一の剛体リンクを介して、そして位置調整制御に誤差および/または複雑さを導入する介在ギア、ベルトあるいはその他のデバイスを伴わずに、位置調整されることになる物体に対してローターが連結されるダイレクトドライブデバイスである。
【0014】
本発明のさらなる態様においては、回転動作を直線動作へと変換するための機構は、第1の回転軸線を画定するプレートピボットピンを含むプレートと、シャフトに固定された第1のリンクとを備える。シャフトはプレート上で回転可能に支持され、かつ、第2の回転軸線を画定し、この第2の回転軸線は第1の回転軸線と平行でありかつそれから離間している。第1のリンクは、第2の回転軸線から離れた位置に配置された第1のリンクピボットピンを含み、かつ、第1の回転軸線と平行な第3の回転軸線を画定する。本機構は、第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクを含む。第2のリンクは第1の回転軸線と平行な第4の回転軸線を画定する第2のリンクピボットピンを含み、第2のリンクピボットピンは、第2のリンクの第1の端部と第2のリンク上の所定のポイントとの間に配置される。本機構はさらに、プレートピボットピンに対して第1の端部において回動可能に連結され、かつ、第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクを含む。この機構においては、シャフトの回転によって、プレートに対する所定のポイントの直線動作が生じる。
【0015】
本機構は以下の特徴の一つ以上を含んでいてもよい。所定のポイントはシャフトの約180度回転に関して直線的に動作する。本機構は、第1のリンクピボットピンとシャフトとの間の距離によって規定される第1のバー長さと、シャフトとプレートピボットピンとの間の距離によって規定される第2のバー長さと、プレートピボットピンと第2のリンクピボットピンとの間の距離によって規定される第3のバー長さと、第1のリンクピボットピンと所定のポイントとの間の距離によって規定される第4のバー長さとを含み、第1のバー長さ対第2のバー長さ対第3のバー長さ対第4のバー長さの比率は、1:2:2.5:5である。プレートピボットピン、第1および第2のリンクピボットピンおよびシャフトのそれぞれはベアリング上で支持され、かつ、バーはベアリングが実質的に同一面上に存在するように構成される。プレートはさらに、プレートに対する第1のリンクの回転を制限するよう構成された停止部材を備える。
【図面の簡単な説明】
【0016】
【図1】回転動作を直線動作へと変換するためのアクチュエータの斜視図である。
【図2】図1の切断線2−2に沿って見たときのアクチュエータの側断面図である。
【図3】Hoekenのリンケージの概略図である。
【図4】リンケージの4本のバーを示す図1のアクチュエータの斜視図である。
【図5】ローターシャフトの角変位(度)対第1のリンクの所定のポイントの変位(インチ)のグラフである。
【図6】図1のアクチュエータの端面図である。
【図7】ローターシャフトの角変位(度)対第1のリンクの所定のポイントにおいて一定な1100N力を提供するために必要なモーターのトルク(Nm)出力のグラフである。
【図8】第1のリンクの第2の端部の変位(インチ)対第1のリンクの所定のポイントにおいて一定な1100N力を提供するために必要なモーターのトルク(Nm)出力のグラフである。
【図9】後退状態で示す二つのアクチュエータを用いるポジション制御デバイスの斜視図である。
【図10】突出状態で示す図9のポジション制御デバイスの斜視図である。
【図11】二つのアクチュエータを用いるポジション制御デバイスの代替実施形態の斜視図である。
【図12】二つの単一リンケージアクチュエータを用いるポジション制御デバイスの別な代替実施形態の斜視図である。
【図13】車両シートのためのアクティブ振動抑制システムの概略図である。
【図14】内燃エンジンのシリンダーバンクの一部の断面図であり、その内部では、図1のアクチュエータがエンジンバルブと直接的に連結されている。
【図15】内燃エンジンのシリンダーバンクの一部の断面図であり、その内部では、図1のアクチュエータがエンジンバルブと間接的に連結されている。
【図16】アクチュエータの代替形態の斜視図である。
【発明を実施するための形態】
【0017】
以下で詳しく説明するように、特定の機械的特性を有するリンケージと組み合わされたロータリードライバーを含むアクチュエータは、移動距離の直線範囲が制限されたスペース内で最大化される用途に好適な様式で、回転動作を直線動作へと変換する。
【0018】
図1、図2、図4、図6は、ロータリーモーターおよび4本バーリンケージの形態で、この所望の特性を有するアクチュエータを示している。このアクチュエータの代替実施形態は図16に示されている。図5、図7および図8は、ロータリーモーターの角変位に対するリンケージ上の所定のポイントの変位の比例関係を含むアクチュエータの機械的特性、両角変位に関する所定ポイントでの一定の力、ならびに、ロータリーモーターの一定トルク出力に関するリンケージ52の動作の直線部分における所定ポイントの変位を示している。位置決めデバイスとして使用された場合の、そうしたアクチュエータのいくつかの実施形態が図9ないし図12に示されている。特に、アクチュエータはプラットフォームに連結され、かつ、その動作を制御する。アクティブ振動抑制デバイスにおいて使用されるアクチュエータの実施形態は図13を参照して説明されている。さらに、エンジンバルブを制御するために使用されるアクチュエータの実施形態は図14および図15を参照して説明されている。
【0019】
ここで図1および図2を参照すると、回転動作を直線動作へと変換するためのアクチュエータ50は、モーターハウジング62によって支持されかつその中に配置されたロータリーモーター60を含む。アクチュエータは、モーター60の一端に連結され、かつ、それによって駆動される第1のリンケージ52を含む。リンケージ52は、Hoekenのリンケージとして構成されており、そして、直線経路に沿って、リンケージに連結された物体を位置調整するために使用できる。アクチュエータ50は、有利なことには、スペース内で物体を直線的に位置調整するためのコンパクトな解決策を提供する。
【0020】
図示する実施形態においては、物体の位置調整は単一のリンケージ52を用いて実現できるが、アクチュエータ50はさらに、モーター60の第2の端部に連結され、かつ、それによって駆動される第2のリンケージ252を含む。第2のリンケージ252は、第1のリンケージ52の鏡像であり、以下でさらに説明するように、第1のリンケージ52と同期的にかつそれと協働で動作するよう構成されている。両方のリンケージ52,252に共通の要素は同じ参照数字によって示している。したがって、各リンケージの構成は、第1のリンケージ52のみを参照して説明する。
【0021】
ロータリーモーター60は、ハウジング62に固定されたステータ72と、ローター軸線82を中心として回転可能であるようステータ72内に同軸状に配置されたローター80とを含む。ローター80は、ハウジング62上で回転可能に支持された対向する第1および第2端部84,85を有する中空円筒体である。ロータリーモーター60は、Port Washington, NYの、Bayside(登録商標)Motion Groupによって製造されたモデルK127300などの既存のフレームレスキットモーターであってもよい。
【0022】
ハウジング62は、ハウジングエンドプレート64によって各端部において蓋がされた密閉側壁63を含む。各端部プレート64は、ローター軸線8と平行な方向に外側に向かって延在し、ベアリング194を支持し、かつ、リンケージ52の第1の回転軸線76を画定するプレートピボットピン68を含む。図示する実施形態では、プレートピボットピン68は、したがって第1の回転軸線76は、回転軸線82の上に重なり、かつ、それと実質的に垂直に整列させられる。
【0023】
エンドキャップ100はローター80の第1の端部84に固定される。エンドキャップ100は、閉塞された第1の端部101を有する中空円筒体である。エンドキャップ100は、ハウジング60のエンドプレート64に形成された開口66内で回転可能に支持され、この結果、外面102は概してエンドプレート64の平面内に存在する。第1の端部101に隣接して、エンドキャップ100の外周面は、ハウジングエンドプレート64内に設けられたローターベアリング89によって支持されている。ローターベアリング89は、Mechatronics Corporation of Preston, Washingtonによって販売されているSilverthin(商標)モデルSB035アンギュラコンタクトベアリングなどの薄断面ベアリングであってもよい。
【0024】
エンドキャップ100は、外面102から内側に延在し、かつ、開放された第2の端部103において終端をなしている。エンドキャップ100の外径は第2の端部103において縮小しており、ローター80の内面内に圧入されるためのサイズとされた環状突起128を形成している。ローター80に対するエンドキャップ100の相対回転は、ローターに対してエンドキャップ100を固定することによって阻止される。これは、たとえば、ローター80および環状突起128にそれぞれ形成された相互に整列するネジ孔86,130内にネジ(図示せず)を設けることによって達成できる。したがって、エンドキャップ100はローター80と共に回転し、そしてモーター60の出力シャフトとして機能する。エンドキャップ100の回転中心132はローター軸線82と同軸であり、これは、リンケージ52の第2の回転軸線に対応する。
【0025】
エンドキャップ100の外面102は、円の一部の形状のエンドキャップ100の周面に形成された突出段部104を含むが、この一部の側面を画定する弦はエンドキャップ100の直径ではない。段部104を外面102の残部に接合するショルダー106が形成される。エンドキャップピン108が、エンドキャップ100の周面に隣接して段部104に設けられている。エンドキャップ108は段部104から外側に突出し、ベアリング158を支持し、そしてローター軸線82と平行に延在するリンケージ52の第3の回転軸線110を画定する。
【0026】
モーター60は、ローター80の角ポジションを測定するために外部光学エンコーダ120を含む。この実施形態では、エンコーダシャフト118は、ローター軸線82と同軸状に第1の端部101の外面102から突出している。エンコーダシャフト118は、フレキシブルカップリング124を用いて、エンコーダの入力シャフト122に接続されており、ローター80の角ポジションの正確測定を可能とするようになっている。だが、アクチュエータ50は、この形態に限定されるものではない。たとえば、モーター60は内部エンコーダを備えていてもよい。
【0027】
第2のエンドキャップ200はローター80の第2の端部85に対して固定される。第2のエンドキャップ200は、形状および機能に関して、第1のエンドキャップ100のそれと実質的に類似であり、第2のエンドキャップ200の同じ要素は同じ参照数字によって示している。こうした理由で、第1のエンドキャップ100に対する以下の差異、すなわちエンドキャップ200はエンコーダシャフト118を含まないことを指摘することを除いて、第2のエンドキャップ200の詳細な説明は省略する。エンドキャップ200は、ローター軸線82と同軸状に整列させられた貫通孔202を備える。貫通孔202はロータリーモーター60の内部に対するアクセスをもたらすが、これは、アクチュエータ50の組み立ておよび分解の間、有益である。
【0028】
上述したように、リンケージ52はHoekenのリンケージとして構成される。Hoekenのリンケージは、回転動作を概ね直線的な動作へと変換する4本バーリンケージである。図3を参照すると、Hoekenのリンケージは、回転する第1のバーIと、この第1のバーIを第4のバーIVに連結する固定された第2のバーIIと、第1のバーIによって一端において駆動される第3のバーIIIと、この第3のバーIIIの中間部分を支持する第4のバーIVとを含む。第1のバーIの回転によって、第3のバーIIIのポイントPは破線によって示す閉ループ経路53に沿って移動する。図から分かるように、この経路は実質的に直線部分55を含む。
【0029】
図4を参照すると、リンケージ52の4本のバーは以下のように規定される。
【0030】
リンケージ52の第1のバー116はエンドキャップ200によって提供される。さらに詳しく言うと、第1のバー116は、エンドキャップ200の回転中心132とエンドキャップピン108との間で延在するエンドキャップ200の一部を含む。第1のバー116は、エンドキャップ200の外面102に対応する平面内で第2の回転軸線82を中心として、ハウジング62に対して回転する。
【0031】
リンケージ52の第2のバー88はハウジング62によって提供される。さらに詳しく言うと、第2のバー88は、エンドプレート64の一部を含み、かつ、プレートピボットピン68とエンドキャップ200の回転中心132との間で延在する。第2のバー88は、ハウジング62に対する固定バーであり、かつ、リンケージ52によって生み出される直線動作の方向を規定する。
【0032】
リンケージ52の第3のバー151は第1のリンク150によって提供される。第1のリンクは、矩形断面の長尺な剛体バーであり、かつ、第1の端部152と、この第1の端部152とは逆側の第2の端部154とを含む。第1および第2の端部152,154、ならびに第1および第2の端部152,154間の中間ポイント156は、第1のリンク150の対向する主面166,168間で延在する貫通孔165を備える。ベアリング158,160(図示していない中間点ベアリング)は、個々の貫通孔165内に圧入されており、かつ、ピボットピンを受け入れるためのサイズおよび形状となっている。たとえば、第1のリンク150の第1の端部152のベアリング158はエンドキャップピン108を受け入れ、そしてハウジング62およびエンドプレート100に対するエンドキャップピン108(および第3の回転軸線110)を中心とする第1のリンク150の回転を可能とする。中間ポイント156に配置されたベアリングはリンクピン162を支持する。リンクピン162は、第1のリンク150の両主面166,168から外側に突出し、かつ、ローター軸線82と平行に延在するリンケージ52の第4の回転軸線164を画定する。第1のリンク150によって引き伸ばされて、リンケージ52の第3のバー151は、エンドキャップピボットピン108とベアリング160の中心線との間で延在している(これは図4のポイントPと一致する)。
【0033】
リンケージ52の第4のバー181は第2のリンク180によって提供される。第2のリンク180は、矩形断面の長尺な剛体バーであり、かつ、第1の端部82と、この第1の端部82の逆側の第2の端部184とを含む。第1の端部182は、第2のリンク180の対向する主面196,198間で延在する貫通孔195を備える。ベアリング194は、貫通孔195内に圧入されており、かつ、プレートピン68を受け入れるためのサイズおよび形状となっている。したがって、第2のリンク180の第1の端部182は、ハウジング62に対して、プレートピン68(および第1の回転軸線76)を中心として回転する。第2のリンク180の第2の端部184は分岐しており、したがって、第2の端部184における主面196,198間の距離は、第1の端部182におけるそれよりも大きく、かつ、第2の端部184は、第1のリンク150の中間部分にまたがりかつリンクピン162と係合する離間したヨークアーム186,188を含むヨークを形成している。したがって、第2のリンク180の第2の端部184は、ハウジング62および第1のリンク150に対して、リンクピン162(および第4の回転軸線)を中心として回転する。第2のリンク180によって引き伸ばされて、リンケージ52の第4のバー181は、プレートピボットピン68とリンクピン162との間で延在している。
【0034】
ヨークアーム186,188を用いて第2のリンク180を回動させることで、第2のリンク180の第1の端部182は、第1のリンク150と同じ平面内に存在するように配置できる。さらに、段部104によってエンドキャップ100を回動させることによって、そして段部104上にエンドキャップピン108を配置することによって、メインリンク150と、内側ヨークアーム188を収容できるハウジング64との間にスペースが設けられる。協働で、これらの特徴部は、有利なことには、ピボットピンベアリング158,160および194(これは既存のラジアルボールベアリングである)を単一の平面内に配置することを可能とするが、これによってリンクへの捩れ荷重が使用時に回避される。だが、リンケージ52はこの形態に限定されず、ある実施形態では、第2のリンク180はヨークを伴わずに形成されてもよく、そして、代わりに、オフセット部分を有するかあるいは直線形態を有するように形成されてもよい。
【0035】
リンケージ52はローター80の回転動作を、第1のリンク150上の所定のポイントPでの直線動作へと変換するのに使用される。図示する実施形態では、第1のリンク150の第2の端部154におけるベアリング160の中心は、直線動作が生み出される所定のポイントPとして規定される。それぞれの第1ないし第4のバー116,88,150,180の相対長さを調整することによって、ポイントPの動作を規定できる。アクチュエータ50においては、第1のバー長さは、エンドキャップピン108とエンドキャップ200の回転中心132との間の距離によって規定され、第2のバー長さはエンドキャップ200の回転中心132とプレートピン68との間の距離によって規定され、第3のバー長さはエンドキャップピン108とポイントPとの間の距離によって規定され、そして第4のバー長さはエンドキャップピン108とポイントPとの距離によって規定される。図示する実施形態では、バー長さは以下の通りである。第1のバー116は1インチであり、第2のバー88は2インチであり、第3のバー151は5インチであり、そして第4のバー181は2.5インチである。この構成を用いて実現される直線移動の範囲は約4インチである。もちろん、リンケージのバーのサイズを比例的に大きくすることで、増大した直線移動の範囲を実現できる。たとえば、1.25インチ、2.5インチ、6.25インチおよび3.125インチのぞれぞれの第1ないし第4のバー長さに関して、実現される直線移動の範囲は約5インチである。逆に、小さな直線移動の範囲が必要とされる用途に関しては、本機構はスケールダウン可能であり、この結果、さらにコンパクトなデバイスが実現される。
【0036】
リンケージ52に関して、第1のバー長さ対第2のバー長さ対第3のバー長さ対第4のバー長さの比率は、1:2:5:2.5である。こうした比率を用いることで、少なくとも以下のいくつかの利点が実現される。
【0037】
ポイントPの動作の直線部分は、固定された第2のバー88と平行なラインに沿って生じる。図示する実施形態では、固定された第2のバー88は垂直に向けられ、したがって、ポイントPの動作の直線部分はまた垂直動作を伴う。
【0038】
さらに、図5に示すように、ポイントPの動作は実質的に、ローター80の180度回転にわたってエンドキャップピン108の角変位に比例する。すなわち、ポイントPは、概ね180度の範囲に対応する、基準ラインAおよびBによって示すローター80の回転動作の範囲内で、概ね直線的に動作する。
【0039】
アクチュエータ50において、二つの外部リンク150,180が設けられるが、これは、それぞれ、Hoekenの4本バーリンケージの第3のものIIIおよび第4のもIVとして機能する。残る2本のバー(第1および第2のバーI,II)は、モーター60およびモーターハウジング62のコンポーネントによって提供される。さらに詳しく言うと、第1のバー116を包含する第2のエンドキャップ200はHoekenのリンケージの回転する第1のバーIとして機能し、そして第2のバー88を包含するモーターハウジング64はHoekenのリンケージの固定された第2のバーIIとして機能する。この形態(第1および第2のバー116,88が外部リンクとして形成されておらず、その代わりに、モーターアセンブリそれ自体に組み込まれている)は、所望の動作を実現するために必要なコンポーネントの数を低減し、この結果、コンパクトなアクチュエータアセンブリを実現する。
【0040】
ここで図6を参照すると、アクチュエータ50は、第1のリンク150の第2の端部154が、図5のAおよびB間で規定される直線動作範囲内で前後に動作するよう構成されている。ある実施形態では、モーター60に対して接続されたコントローラ14(図3)が、ローター80が、したがってエンドキャップ100が、180度の範囲を超えて回転するのを阻止する。さらに、停止部材90が、外面102のショルダー106と機械的に干渉するように設けられ、これによって直線範囲を超える回転が阻止される。停止部材90はハウジング62に対して固定され、かつ、エンドプレート64の開口66の一部と重なるように半径方向内側に延在する。リンケージが直線範囲の一端に対応する完全突出形態にあるとき(図4に実線で示す)、ショルダー106の第1の部分は停止部材90の第1の停止面96に当接する。このポジションでは、第1のリンク150の第1の端部152は、図を見たとき、ローター軸線82の左側の位置でローター軸線82を通る水平ライン上に配置される。さらに、図を見たとき、ポイントPは、ハウジング62に対して横方向でかつその上面の上方のポジションに置かれている。エンドキャップ100が反時計回りに回転するとき、リンケージ52は下方に動作し、そしてポイントPは直線経路Lに沿って下方に移動する。リンケージ52が直線範囲の逆端に対応する後退ポジションにあるとき(図4において破線で示す)、ショルダー106の第2の部分は停止部材90の第2の停止面98に当接する。このポジションでは、第1のリンク150の第1の端部は180度円弧を経て回転してしまっており、いまや、図を見たときに、ローター軸線82の右側の位置でローター軸線を通る水平ライン状に配置される。さらに、ポイントPは、いまや、ハウジング62の横方向でかつその上面の下方のポジションに置かれている。
【0041】
さらに有利なことには、図7に示す一実施形態において、4本バーリンケージ52は、ポイントPにおいて一定の1100Nの力を提供するために必要なモーター60のトルク出力は、ポイントPの直線移動範囲と関連付けられたモーターの角変位範囲のほとんどにわたって実質的に一定であるように、ローター80の回転動作を直線動作へと変換するよう構成される。モーター60のトルク出力は、約100度の範囲に対応する、基準ラインCおよびDで示すローター80の回転動作の範囲内で実質的に一定である。
【0042】
さらに、図8に示す一実施形態において、4本バーリンケージ52は、ポイントPにおいて一定の1100Nの力を提供するために必要なモーター60のトルク出力は、ポイントPの動作の直線範囲のほとんどにわたって実質的に一定であるように、ローター80の回転動作を直線動作へと変換するよう構成される。モーター60のトルク出力は、約4インチに対応する、基準ラインEおよびFで示すチップ直線変位の範囲の大部分にわたって実質的に一定である。
【0043】
図9および図10を参照すると、ポジション制御デバイス350はアクチュエータ50の一実施形態であり、このデバイス350は、個々のロータリーモーター60,60'のローター軸線82,82'が実質的に同軸であるように配置された二つのアクチュエータ50,50'を含む。さらに、第1のアクチュエータ50のリンケージ52,52'は、第2のアクチュエータ50'のリンケージ52',252'とは反対の方向に回転するよう構成される。
【0044】
図示する実施形態では、ポジション制御デバイス350は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の下方に延在する脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持される。図9において、ポジション制御デバイス350は、第1の後退した状態で示されているが、ここでは、プラットフォーム16とベース22との間の垂直距離は距離d1である。この実施形態では、プラットフォーム16とハウジング62,62'との間には垂直間隔は実質的に存在せず、この結果、後退した形態は非常にコンパクトである。さらに、プラットフォーム16は実質的にポジション制御デバイス350の上に中心が置かれている。図10において、ポジション制御デバイス350は、第2の突出した状態で示されているが、ここで、プラットフォーム16とベース22との間の垂直距離は距離d2であり、このd2はd1よりも大きい。プラットフォーム16は、後退および突出状態間での移行の間、そして突出状態にある間、ポジション制御デバイス350の上に中心が置かれたままである。図示する実施形態は、軸方向に距離s1だけ離間したアクチュエータ50,50'を示しているが、この形態は限定ではない。たとえば、二つのアクチュエータ50,50'は、s1よりも大きいかあるいは小さな距離だけ離間していてもよい。
【0045】
図11を参照すると、ポジション制御デバイス450はアクチュエータ50の代替実施形態である。先のポジション制御デバイス350と同様、ポジション制御デバイス450は二つのアクチュエータ50,50'を含むが、第2のアクチュエータ50'は第1のアクチュエータ50と同一である。ポジション制御デバイス450において、アクチュエータ50,50'は、それぞれのロータリーモーター60,60'のローター軸線82,82'が平行でかつ離間しているように配置される。さらに、第1のアクチュエータ50のリンケージ52,252は、第2のアクチュエータ50'のリンケージ52',252'とは逆方向に回転するよう構成される。図示する実施形態では、ポジション制御デバイス450は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の下方に延在する脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持されている。図示する実施形態は、距離s2だけ離間したアクチュエータ50,50'の軸線82,82'を示しているが、この形態は限定ではない。たとえば、軸線82,82'は、s2よりも大きいかあるいは小さな距離だけ離間していてもよい。さらに、図示する実施形態は同一面上にあるアクチュエータ50,50'を示しているが、アクチュエータは、これに代えて、平行軸線82,82'を維持しながら、異なる平面内に存在するようオフセットしていてもよい。
【0046】
図12を参照すると、ポジション制御デバイス550はアクチュエータ50の代替実施形態である。ポジション制御デバイス550は二つのシングルリンケージアクチュエータ250,250'を含む。特に、各アクチュエータ250,250'は単一のリンケージ52,52'を備える。ポジション制御デバイス550において、アクチュエータ250,250'は、それぞれのロータリーモーター60,60'のローター軸線82,82'が同軸であるように配置される。さらに、第1のアクチュエータ250のリンケージ52は、第2のアクチュエータ250'のリンケージ52'とは逆方向に回転するよう構成される。図示する実施形態では、ポジション制御デバイス550は、ベース22に対するプラットフォーム16の垂直ポジションを制御するために使用され、そして複数の脚18を介してプラットフォーム16に連結される。特に、各脚18はピボットピン20を含むが、これは、各リンケージ52,52',250,250'のそれぞれの第1のリンク150の第2の端部154、ポイントPに対応する位置において、ベアリング160によって回転可能に支持されている。ポジション制御デバイス550は、ポジション制御デバイス350と同様に機能するが、より簡素であり、より少ないベアリングしか必要とせず、そしてポジション制御デバイス350よりも軸方向によりコンパクトである。図示する実施形態は、軸方向に当接する二つのアクチュエータ250,250'を示しているが、この形態は限定ではなく、アクチュエータ250,250'は軸方向に離間していてもよい。
【0047】
上記ポジション制御デバイス350,450,550のそれぞれに関して、向き合う側に配置されたリンケージ機構を使用することによって、アクチュエータ50が調和して動作する場合、荷重によるベース22におけるそれぞれの反作用トルクは著しく低減される。さらに、単一のロータリーモーター60ではなく、プラットフォーム16を位置調整するために二つのロータリーモーター60,60'を用いることによって、二つのロータリーモーター60,60'のそれぞれはサイズを低減でき、この結果、さらにコンパクトな機構が実現される。さらに、ある実施形態においては、それぞれのリンケージ52,252,52',252'は、プラットフォーム16がロータリーモーター60,60'の一つが故障した場合に水平状態を維持できるように、機械的に互いに結束されてもよい。
【0048】
図13を参照すると、ポジション制御デバイス350は、車両フレーム4の振動に由来する車両シート8の振動を軽減するかあるいは排除するために、車両2において使用されるアクティブ振動抑制デバイスにおいて使用されてもよい。車両シート8は剛体シートベース10に対して固定され、かつ、少なくとも一つのセンサー12を支持する。たとえば、センサー12は、地面gに対するシートの動きを検出するための加速度計を含んでいてもよい。シート8およびベース10は、車両フレーム4の上に載っており、かつ、ポジション制御デバイス350によって、その上で支持される。ポジション制御デバイス350は、補助シートサポート構造体を介して、車両フレームに対して間接的に取り付けられても、あるいはフレームそれ自体に対して直接取り付けられてもよく、これによって、ポジション制御デバイス350は車両フレーム4に対して固定される。ポジション制御デバイス350は、コントローラ14から受け取った制御信号に基づいて、車両フレーム4に対して、ベース10を、したがってシート8を位置調整する役割を果たす。コントローラ14は、センサー12からのシート動作データを含む信号、およびハウジング62,62'に対するローターポジションを指し示すエンコーダ信号を受け取る。こうした信号に基づいて、コントローラ14は、車両シート8のポジションが車両フレームに対して制御されるように、ポジション制御デバイス350のロータリーモーター60,60'に対して制御信号を出力する。図示する実施形態はポジション制御デバイス350を採用するが、これは限定ではない。たとえば、デバイス350の代わりに、開示されたポジション制御デバイス450,550のいずれかを用いることもできる。さらに、単一のアクチュエータ50,250は、アクティブ振動抑制デバイスを形成するために、補助シートサポート構造体と組み合わせて使用することができる。
【0049】
ある実施形態では、個々のロータリーモーター60,60'は、車両の振動から車両シート8を切り離すために、検出されたシート挙動をキャンセルするために、ベース10を、したがってシート8を位置調整するために制御される。ある実施形態では、個々のロータリーモーター60,60'は、協働して動作するように制御される。たとえば、車両フレーム4からの両アクチュエータ50,50'の第1のリンク150の第2の端部154の距離が同一となるように制御される。別な実施形態においては、第1のアクチュエータ50のロータリーモーター60は第2のアクチュエータ50'のロータリーモーター60'とは別個に制御されてもよく、これによって、車両フレーム4に対するシートベース10の姿勢を制御することができる。そうした実施形態においては、リンケージ52,252,52',252'とシートベース10との間に、これらコンポーネント間の相対動作を可能とするために、少なくとも一つの付加的自由度が必要となるであろう。これは、たとえば、位置Gに付加的ピボットポイントを設けることによって実現できる。
【0050】
アクティブ振動抑制デバイス5(これは、ロータリーモーター60,60'からの回転動作出力を直線動作へと変換するためにアクチュエータ50を利用する)は、リニアモーターを使用する制御システムに対して、複数の利点を有する。たとえば、ロータリーモーターは、安価に製造でき、かつ、リニアモーターよりも容易に密閉できる。さらに、ロータリーモーターは、機械式リンケージと組み合わせることで、同等あるいはより大きな直線動作の範囲を提供しながら、リニアモーターよりも、よりコンパクトなサイズとすることができる。この特徴は、たとえば車両シートの振動抑制において重要であり、この場所は、シートと床との間のスペース(その中に制御機構が配置される)が制限される。アクチュエータのその上さらなる利点は、機械式リンケージの少なくともいくつかがモーターハウジングおよびローターシャフトに組み込まれ、よりコンパクトで、複雑でなく、そしてより少ない部品しか必要としないアクチュエータが実現されることである。
【0051】
さらに、ある実施形態では、アクチュエータ50は、ダイレクトドライブデバイスであってもよく、この場合、ローターが単一の剛体リンクを介して、そして介在ギア、ベルト、あるいは位置調整制御に誤差および/または複雑さを導入する、その他のデバイスを伴わずに、位置調整されるべき物体に対して連結される。
【0052】
さらに、アクティブ振動抑制デバイス5においてポジション制御デバイス350を使用することの、さらなる利点は、ロータリーモーターがリニアモーターよりも本質的により効率がよいという事実にある。たとえば、リニアモーターにおいて有用であろう三つの異なるアーマチュア/ステータ関係が存在する。1)磁石が前後に動くとき、アーマチュアは、移動量の少なくともある範囲に関して、ステータ極内に留まるように、アーマチュア磁石の長さを超えてステータのコイルおよび極が延在するアンダーハング関係。この設計は、最大可動域においてアーマチュアが依然としてコイル内に留まるものであってもよく、あるいは、それは、ある時点で、それらを超えて突出し始めよい。2)アーマチュア磁石がステータ極と同じ長さであるイーブンハング設計。この設計では、アーマチュアが動き始めるや否や、いくつかの磁石はステータ極の外側に移動する。3)アーマチュア磁石がステータ極の長さを超えるオーバーハング関係。このオーバーハング設計では、アーマチュアの動作は、少なくともある可動範囲にわたって、ステータ極内に存在する磁石の量を変化させない。この設計では、全可動範囲を、あるいはその一部のみを使用できる。
【0053】
上記関係のいずれかに関して、効率とコストとの間にトレードオフが成り立つ。たとえば、いくつかの磁石がステータ極の外側に動くや否や、力出力に対するその寄与率は急激に低減する。比較的高い磁石の費用のために、常時、磁石を最大限に利用することが望ましい。
【0054】
アクティブシート振動抑制用途に見られるような限定されたスペース状況において使用される場合、そしてたとえばアンダーハング設計を利用する場合、磁石を最大限に利用することが可能である。だが、固定入力電流に関して可動範囲の大部分にわたって生み出される力の大きさは、より多くの磁石が使用された場合よりも小さくなる。したがって、リニアモーターの効率は低減する(ここで、効率は入力電力で割った機械的出力として規定される)。イーブンハング設計は、これらの要素間でのトレードオフである。
【0055】
リニアモーターではなくロータリーモーターを使用する利点は、全ての磁石が全ての回転角度に関してステータの極に面することはロータリー設計において特有である、ということである。これは、効率およびコストのトレードオフに関して最適条件である。こうした理由で、直線的位置調整用途のために、リニア・アクチュエータではなく、ロータリーモーターおよび回転動作を直線動作へと変換するための機構を使用することは有益である。
【0056】
図示する実施形態は、車両シートの振動を積極的に抑制するために使用される、回転動作を直線動作へと変換するためのアクチュエータ50を示しているが、アクチュエータ50はこうした用途に限定されない。たとえば、アクチュエータ50はまた、ホイールサスペンションシステムおよびエンジン振動抑制システムを含む車両振動抑制のその他の態様における使用にも好適である。さらに、アクチュエータ50は振動抑制に限定されず、物体のポジション制御に対する広範な用途を有する。たとえば、アクチュエータはエンジンバルブ動作を制御するために使用でき、これによってエンジン効率を改善できる。
【0057】
ここで、図14を参照すると、アクチュエータ50は、従来のカムシャフト駆動バルブトレーンに代えて、エンジンバルブポジションを制御するために内燃エンジン700において使用されてもよい。エンジン700は、シリンダーバンク714を形成するためにV形状に配置されたシリンダーブロック718内に配置された複数のシリンダー712を有し(一つのシリンダーしか示していない)、シリンダー712の上側端部はシリンダーヘッド716によって閉塞されている。一対の吸気バルブ740(その一方しか図示していない)はシリンダー712およびその関連する燃焼チャンバー744のインナー側において長手方向に整列させられており、そして排気バルブ762がシリンダー712のアウター側に配置されている。スパークプラグ766あるいは類似のデバイスの形態の点火具がまた、各シリンダー712の燃焼チャンバー744内に配置されている。
【0058】
アクチュエータ50は各吸気および排気バルブ740,762に関して設けられ、そして第1のリンク150の所定のポイントPは対応するバルブシステムに対して回動可能に連結される。アクチュエータ50は、コントローラ(図示せず)から受け取った制御信号に基づいて、シリンダーブロック718に対して吸気および排気バルブ740,762を位置調整する役割を果たす。コントローラは、ハウジング62に対するローターポジションを指し示すエンコーダ信号からのバルブ動作データ、およびクランクシャフトデータを含む信号を受け取る。これらの信号に基づいて、コントローラはアクチュエータ50のロータリーモーター60に対して制御信号を出力し、これによって、バルブ740,762のポジションはシリンダーブロック718に対して制御される。
【0059】
図15を参照すると、別な実施形態では、アクチュエータ50はそれぞれの吸気および排気バルブ740,762に対して間接的に連結されてもよい。たとえば、第1のリンク150の所定のポイントPは吸入プッシュロッド730に連結できる。プッシュロッド730は、ピボット軸734上で揺動する吸気ロッカーアーム732を動作させる。ロッカーアーム732は一対の作動アーム736を含むが、そのそれぞれは、好ましくは、油圧ラッシュアジャスター738を支持する。ラッシュアジャスター738は一対の吸気バルブ740と係合する。この図ではアクチュエータ50および吸気プッシュロッド730bによって隠れているが、別なアクチュエータ50が一次ロッカーアーム754を作動させるために排気プッシュロッドに連結されており、これは、吸気ロッカーアーム732と同じピボット軸734上で回動可能である。一次ロッカーアーム754は、今度は、二次ロッカーアーム758と係合する二次プッシュロッド756と係合する。ロッカーアーム758の作動アームは、直接、排気バルブ762と係合する。先の実施形態と同様、アクチュエータ50は、コントローラ(図示せず)から受け取った制御信号に基づいて、シリンダーブロック718に対して吸気および排気バルブ740,762を位置調整する役割を果たす。コントローラは、ハウジング62に対するローターポジションを指し示すエンコーダ信号からのバルブ動作データ、およびクランクシャフトデータを含む信号を受け取る。これらの信号に基づいて、コントローラはアクチュエータ50のロータリーモーター60に対して制御信号を出力し、これによって、バルブ740,762のポジションはシリンダーブロック718に対して制御される。
【0060】
ここに示すエンジンバルブポジション制御機構は、シリンダー712の各エンジンバルブ740,762のためにアクチュエータ50を備えるが、これは限定ではない。たとえば、単一のアクチュエータ50を複数のバルブを制御するために使用できる。たとえば、単一のアクチュエータは、単一の燃焼チャンバーに組み合わされた複数の吸気バルブを同時に作動させることができる。
【0061】
バルブ動作を制御するためにアクチュエータ50を使用することは、有利なことには、バルブの動作をエンジンクランクシャフトの回転から切り離すことを可能とする。さらに、完全に制御可能なバルブは、エンジン速度の全範囲にわたって、タイミングおよびリフトの完全な制御を可能とする。これは、全運転条件にわたってバルブ動作を最適化することを可能とする。それはまた、運転の変更を可能とし、エンジン効率モードにおける、あるいは最大パワー供給モードにおける運転を可能とする。それはエンジンシリンダーの非作動化を容易にし、そして、より複雑な非作動化スキームを可能とする。たとえば、現在の手法のように全シリンダーバンクを非作動化するのではなく、シリンダーバンクの一部あるいは別個のシリンダーを非作動化することができる。さらに、バルブ動作を制御するためのアクチュエータ50の使用は、クランクシャフトを回転させるための別個のスターターを要さずに、エンジンのセルフスタートを可能とする。
【0062】
アクチュエータ50を含む、ここで説明したエンジンバルブ制御システムの使用は、移動量の直線範囲が制限されたスペース内で最大化される、この用途に好適な様式で、回転動作の直線動作への変換を実現する。たとえば、バルブシャフトと整列状態で配置されかつバルブステムから上方に突出する必要があるリニア・アクチュエータとは異なり、アクチュエータ50は、バルブの一方側に対する位置から、随意に、バルブリフトプロファイルを制御でき、したがって、バルブトレーンに対して高さを付加しない。バルブの側方に対するアクチュエータ50の位置は、レバーあるいはロッカーアームを要さずに、バルブの直線変位を提供でき、これは、バルブガイドの摩擦損失および磨耗を著しく低減できる。
【0063】
この特徴は、アクチュエータ50のコンパクトなサイズと組み合わされて、シリンダー当たり複数のバルブが採用された場合に、各バルブの完全な制御を実現しながら、複数のアクチュエータをシリンダーの周囲に設置するか、あるいはシリンダーの周面の回りに離間して配置することができるように、アクチュエータのパッケージングを可能とする。
【0064】
アクチュエータ50は、バルブポジションを制御するためにリンケージを介して作用するロータリーモーター60を利用するので、アクチュエータ50はシリンダーヘッド716から離れて配置できる。これは有利である。なぜなら、これは、アクチュエータ50およびセンサーがシリンダー排気バルブおよびマニホールドに関連する高温を回避することを可能とするからである。これは、熱消磁温度に達する前にアクチュエータのコイル内で消散できる電力量を増大する。さらに、アクチュエータモーターはバルブ自体から離れて配置されるので、冷却デバイスの設計は簡素化される。たとえば、他の構造体と干渉することなく、アクチュエータモーターの全てを取り囲む冷却ジャケットを設けることができる。
【0065】
アクチュエータ50において、ローターエンコーダ120がポジションを検出するために使用される。このセンサーは、バルブの位置から離れて、ロータリーモーター60と共に配置される。ロータリーエンコーダ120は、リニアポジション・速度センサーよりも、安価であり、かつ、信頼性が高い。それはまた、低温であると思われるポジションに配置することができる。アクチュエータ50はロータリーモーター60を利用するので、バルブポジションおよび速度を検出するための信頼性の高いセンサーの設計および製造は相対的に簡単である。
【0066】
アクチュエータ50はロータリーモーターを利用するので、当該デバイスはエンジン700でに使用に好適である。なぜなら、高いエンジン速度では、シリンダークラッキング圧力に打ち勝つと共に排気バルブを開くために、かなりのピークパワーが必要となるからである。この要求はシステムのパワーエレクトロニクスに極度の要求を課し、そしてさらに、アクチュエータにおける最大効率に関する必要性を生じさせる。上述した理由から、ロータリーモーターは、たとえばリニアモーターを利用するアクチュエータよりも、本質的により効率がよい。ロータリーモーターの相対効率はモーターそれ自体をことによるとダウンサイズするために、あるいは電力要求を低減するために、あるいは両方のために利用できる。
【0067】
パッケージングの観点から、ロータリーモーター60およびリンケージ52を含むアクチュエータ50は、リニアモーターよりも小さな断面を有し、そしてモーターとバルブとに間のリンケージ接続によって、アクチュエータは、ロータリーモーターがバルブの上に直に載らないように、バルブトレーンと一体化できる。たとえば、アクチュエータ50はV型エンジンのシリンダーバンク間に配置できる。さらに、別体リンケージ(必要ならば)が、リンケージ52のポイントPをバルブに対して接続できる。アクチュエータのロータリーモーターをバルブから離れて配置することによって、シリンダーシステム当たりの積極的に制御される複数のバルブをパッケージするのが、一層容易なものとなる。
【0068】
バルブシートとのバルブの衝突が生じるのを避けるために正確な制御が必要とされる。トルクとアクチュエータ50によって得られるポジションとの間の特定の関係は、エンジンバルブの制御を簡素化する。
【0069】
図16を参照すると、アクチュエータ650はアクチュエータ50の代替実施形態である。アクチュエータ650は実質的にアクチュエータ50と類似しているが、アクチュエータ50のエンドキャップ100,200は組み立ての容易性を改善するために改変されている点で相違する。特に、改変されたエンドキャップ(図示せず)は低減された外径を有するように形成されており、かつ、エンドキャップ100,200を支持する大径ローターベアリング89は、より小さな直径の類似のベアリングによって置き換えられている。改変されたエンドキャップの低減された直径によって、4本バーリンケージの第1のバー116に対応すると共に相応の寸法とされた第3のリンク280が提供される。
【0070】
図示する実施形態は特定のモーターおよびベアリングを使用するものとして説明されているが、本発明はこうしたコンポーネントに限定されるものではなく、モーターおよびベアリングは、特定の用途の要求に基づいて選択されることは明らかである。
【0071】
回転動作を直線動作へと変換するための機構の選択された例証的実施形態を詳しく説明した。だが、ここでは、本発明を明確にするために必要と考えられる一つの構造を説明したに過ぎないことに留意されたい。その他の既存の構造、およびシステムの付属的かつ補助的コンポーネントのそれは、当業者には公知でありかつ理解されると考えられる。さらに、本発明の役立つ実例を説明してきたが、本発明は上述した役立つ実例には限定されず、さまざまな設計変更を特許請求の範囲に記載した本発明から逸脱することなく実施可能である。
【符号の説明】
【0072】
50 アクチュエータ
52 第1のリンケージ
60 ロータリーモーター
62 モーターハウジング
63 密閉側壁
64 ハウジングエンドプレート
66 開口
68 プレートピボットピン
72 ステータ
76 第1の回転軸線
80 ローター
82 第2の回転軸線
84 第1の端部
85 第2の端部
86 ネジ孔
88 第2のバー
89 ローターベアリング
90 停止部材
100 エンドキャップ
101 第1の端部
102 外面
103 第2の端部
104 突出段部
106 ショルダー
108 エンドキャップピン
110 第3の回転軸線
116 第1のバー
118 エンコーダシャフト
120 外部光学エンコーダ
122 入力シャフト
124 フレキシブルカップリング
128 環状突起
130 ネジ孔
132 回転中心
150 第1のリンク
151 第3のバー
152 第1の端部
154 第2の端部
156 中間ポイント
158,160 ベアリング
162 リンクピン
164 第4の回転軸線
165 貫通孔
166,168 主面
180 第2のリンク
181 第4のバー
182 第1の端部
184 第2の端部
186,188 ヨークアーム
194 ベアリング
195 貫通孔
196,198 主面
200 第2のエンドキャップ
202 貫通孔
252 第2のリンケージ
【特許請求の範囲】
【請求項1】
ボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスであって、
少なくとも一つの方向への前記ボディの移動に対応する入力信号を提供するよう構成された少なくとも一つのセンサーと、
前記ボディのポジションを制御するよう構成されたロータリーモーターと、
前記ロータリーモーターを前記ボディに連結する少なくとも二つの回動可能に連結されたリンクを備えるリンケージであって、前記モーターからの回転動作出力を前記ボディの直線動作へと変換するよう構成されたリンケージと、
コントローラであって、前記少なくとも一つのセンサーからの前記入力信号に基づいて、前記少なくとも一つの方向において前記ボディを位置調整するために前記リンケージを介して作用する前記ロータリーモーターに制御信号を提供するコントローラと、
を具備することを特徴とするアクティブ振動抑制デバイス。
【請求項2】
前記ボディに一定の力を提供するために前記モーターによって要求されるトルクは、実質的に、前記ロータリーモーターの出力シャフトの100度の角回転にわたって一定であることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項3】
前記リンケージは、前記ボディの動作が前記出力シャフトの180度の回転にわたって前記出力シャフトの角変位に実質的に比例するように、前記モーターの出力シャフトの回転動作を直線動作へと変換するよう構成されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項4】
前記リンケージは、前記ボディにおいて一定の力を生み出すために前記モーターによって要求されるトルクが、少なくとも4インチの前記ボディの変位の範囲にわたって実質的に一定であるように、前記モーターの出力シャフトの回転動作を直線動作へと変換するよう構成されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項5】
前記リンケージは前記モーターの一方側において前記モーターの出力シャフトに接続されており、かつ、前記デバイスは、さらに、前記一方側と対向する前記モーターの側において、前記モーターの前記出力シャフトに接続された第2のリンケージを備えることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項6】
第2のロータリーモーターと、前記ボディのポジションを制御するよう構成された第2のリンケージと、をさらに具備してなり、前記第1および第2のロータリーモーターは、その個々のローター軸線が平行であるように配置されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項7】
第2のロータリーモーターと、前記ボディのポジションを制御するよう構成された第2のリンケージと、をさらに具備してなり、前記第1および第2のロータリーモーターは、その個々のローター軸線が共直線状であるように配置されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項8】
前記ボディは車両シートからなることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項9】
前記シートは車両内に配置されており、かつ、前記車両の床に対して固定された前記モーターは、前記床と前記シートとの間に配置されていることを特徴とする請求項8に記載のアクティブ振動抑制デバイス。
【請求項10】
前記シートの直線移動距離は少なくとも4インチであることを特徴とする請求項8に記載のアクティブ振動抑制デバイス。
【請求項11】
前記コントローラは、前記少なくとも一つのセンサーによって送信される加速度を最小化するように前記ロータリーモーターに対して制御信号を提供することを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項12】
アクチュエータであって、
出力シャフトを含むロータリーモーターと、
前記出力シャフトに接続されたリンケージとを、備え、前記リンケージは、
第1の回転軸線を形成するハウジングピボットピンを備えたモーターハウジングと、
前記出力シャフトに固定された第1のリンクであって、前記出力シャフトは第2の回転軸線を形成し、前記第2の回転軸線は前記第1の回転軸線と平行でありかつそれから離間させられており、前記第1のリンクは、前記第2の回転軸線から離間させられた位置に配置されかつ前記第1の回転軸線と平行な第3の回転軸線を形成する第1のリンクピボットピンを備える第1のリンクと、
前記第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクであって、この第2のリンクは前記第1の回転軸線と平行な第4の回転軸線を形成する第2のリンクピボットピンを備え、この第2のリンクピボットピンは前記第2のリンクの前記第1の端部と前記第2のリンクの所定のポイントとの間に配置されている第2のリンクと、
前記ハウジングピボットピンに対して第1の端部において回動可能に連結され、かつ、前記第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクと、を具備してなり、
前記出力シャフトの回転は、前記ハウジングに対する前記所定のポイントの直線動作を生じるようになっていることを特徴とするアクチュエータ。
【請求項13】
前記所定のポイントにおいて前記モーターによって生み出されるトルクは、前記所定のポイントにおいて加えられる一定の力のために、前記出力シャフトの100度の角回転にわたって、実質的に一定であることを特徴とする請求項12に記載のアクチュエータ。
【請求項14】
前記リンケージは前記モーターの一方側で前記モーターの出力シャフトに接続されており、かつ、前記デバイスはさらに、前記一方側と対向する前記モーターの側において前記モーターの前記出力シャフトに対して接続された第2のリンケージを含むことを特徴とする請求項12に記載のアクチュエータ。
【請求項15】
前記ハウジングピボットピンおよび前記第1および第2のリンクピボットピンのそれぞれはベアリング上で支持されており、かつ、前記リンクは、前記ベアリングが実質的に同一平面上にあるように構成されていることを特徴とする請求項12に記載のアクチュエータ。
【請求項1】
ボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスであって、
少なくとも一つの方向への前記ボディの移動に対応する入力信号を提供するよう構成された少なくとも一つのセンサーと、
前記ボディのポジションを制御するよう構成されたロータリーモーターと、
前記ロータリーモーターを前記ボディに連結する少なくとも二つの回動可能に連結されたリンクを備えるリンケージであって、前記モーターからの回転動作出力を前記ボディの直線動作へと変換するよう構成されたリンケージと、
コントローラであって、前記少なくとも一つのセンサーからの前記入力信号に基づいて、前記少なくとも一つの方向において前記ボディを位置調整するために前記リンケージを介して作用する前記ロータリーモーターに制御信号を提供するコントローラと、
を具備することを特徴とするアクティブ振動抑制デバイス。
【請求項2】
前記ボディに一定の力を提供するために前記モーターによって要求されるトルクは、実質的に、前記ロータリーモーターの出力シャフトの100度の角回転にわたって一定であることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項3】
前記リンケージは、前記ボディの動作が前記出力シャフトの180度の回転にわたって前記出力シャフトの角変位に実質的に比例するように、前記モーターの出力シャフトの回転動作を直線動作へと変換するよう構成されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項4】
前記リンケージは、前記ボディにおいて一定の力を生み出すために前記モーターによって要求されるトルクが、少なくとも4インチの前記ボディの変位の範囲にわたって実質的に一定であるように、前記モーターの出力シャフトの回転動作を直線動作へと変換するよう構成されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項5】
前記リンケージは前記モーターの一方側において前記モーターの出力シャフトに接続されており、かつ、前記デバイスは、さらに、前記一方側と対向する前記モーターの側において、前記モーターの前記出力シャフトに接続された第2のリンケージを備えることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項6】
第2のロータリーモーターと、前記ボディのポジションを制御するよう構成された第2のリンケージと、をさらに具備してなり、前記第1および第2のロータリーモーターは、その個々のローター軸線が平行であるように配置されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項7】
第2のロータリーモーターと、前記ボディのポジションを制御するよう構成された第2のリンケージと、をさらに具備してなり、前記第1および第2のロータリーモーターは、その個々のローター軸線が共直線状であるように配置されていることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項8】
前記ボディは車両シートからなることを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項9】
前記シートは車両内に配置されており、かつ、前記車両の床に対して固定された前記モーターは、前記床と前記シートとの間に配置されていることを特徴とする請求項8に記載のアクティブ振動抑制デバイス。
【請求項10】
前記シートの直線移動距離は少なくとも4インチであることを特徴とする請求項8に記載のアクティブ振動抑制デバイス。
【請求項11】
前記コントローラは、前記少なくとも一つのセンサーによって送信される加速度を最小化するように前記ロータリーモーターに対して制御信号を提供することを特徴とする請求項1に記載のアクティブ振動抑制デバイス。
【請求項12】
アクチュエータであって、
出力シャフトを含むロータリーモーターと、
前記出力シャフトに接続されたリンケージとを、備え、前記リンケージは、
第1の回転軸線を形成するハウジングピボットピンを備えたモーターハウジングと、
前記出力シャフトに固定された第1のリンクであって、前記出力シャフトは第2の回転軸線を形成し、前記第2の回転軸線は前記第1の回転軸線と平行でありかつそれから離間させられており、前記第1のリンクは、前記第2の回転軸線から離間させられた位置に配置されかつ前記第1の回転軸線と平行な第3の回転軸線を形成する第1のリンクピボットピンを備える第1のリンクと、
前記第1のリンクピボットピンに対して第1の端部において回動可能に連結された第2のリンクであって、この第2のリンクは前記第1の回転軸線と平行な第4の回転軸線を形成する第2のリンクピボットピンを備え、この第2のリンクピボットピンは前記第2のリンクの前記第1の端部と前記第2のリンクの所定のポイントとの間に配置されている第2のリンクと、
前記ハウジングピボットピンに対して第1の端部において回動可能に連結され、かつ、前記第2のリンクピボットピンに対して第2の端部において回動可能に連結された第3のリンクと、を具備してなり、
前記出力シャフトの回転は、前記ハウジングに対する前記所定のポイントの直線動作を生じるようになっていることを特徴とするアクチュエータ。
【請求項13】
前記所定のポイントにおいて前記モーターによって生み出されるトルクは、前記所定のポイントにおいて加えられる一定の力のために、前記出力シャフトの100度の角回転にわたって、実質的に一定であることを特徴とする請求項12に記載のアクチュエータ。
【請求項14】
前記リンケージは前記モーターの一方側で前記モーターの出力シャフトに接続されており、かつ、前記デバイスはさらに、前記一方側と対向する前記モーターの側において前記モーターの前記出力シャフトに対して接続された第2のリンケージを含むことを特徴とする請求項12に記載のアクチュエータ。
【請求項15】
前記ハウジングピボットピンおよび前記第1および第2のリンクピボットピンのそれぞれはベアリング上で支持されており、かつ、前記リンクは、前記ベアリングが実質的に同一平面上にあるように構成されていることを特徴とする請求項12に記載のアクチュエータ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公表番号】特表2013−521443(P2013−521443A)
【公表日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2012−555214(P2012−555214)
【出願日】平成23年3月15日(2011.3.15)
【国際出願番号】PCT/US2011/028451
【国際公開番号】WO2011/119365
【国際公開日】平成23年9月29日(2011.9.29)
【出願人】(591009509)ボーズ・コーポレーション (121)
【氏名又は名称原語表記】BOSE CORPORATION
【Fターム(参考)】
【公表日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年3月15日(2011.3.15)
【国際出願番号】PCT/US2011/028451
【国際公開番号】WO2011/119365
【国際公開日】平成23年9月29日(2011.9.29)
【出願人】(591009509)ボーズ・コーポレーション (121)
【氏名又は名称原語表記】BOSE CORPORATION
【Fターム(参考)】
[ Back to top ]