
回転子の位置検出方法、電動機の制御方法、電動機制御装置及びプログラム
【課題】ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う。
【解決手段】共通のコネクタC1,C2を介してそれぞれ第1及び第2のケーブル6,8で回転位置検出器2及びサーミスタ4が接続される処理部20において、回転位置検出器2の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程と、品質に関する情報が正常であるか否かを判断する第2の工程と、第2の工程で肯定的結果が得られた場合に当該回転位置に関する情報に基づいて回転位置を演算する第3の工程と、第2の工程で否定的結果が得られた場合に、当該品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程と、第4の工程で否定的結果が得られた場合、第3の工程で演算された回転位置に基づいて、回転位置を補間して求める第5の工程とを実行する。
【解決手段】共通のコネクタC1,C2を介してそれぞれ第1及び第2のケーブル6,8で回転位置検出器2及びサーミスタ4が接続される処理部20において、回転位置検出器2の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程と、品質に関する情報が正常であるか否かを判断する第2の工程と、第2の工程で肯定的結果が得られた場合に当該回転位置に関する情報に基づいて回転位置を演算する第3の工程と、第2の工程で否定的結果が得られた場合に、当該品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程と、第4の工程で否定的結果が得られた場合、第3の工程で演算された回転位置に基づいて、回転位置を補間して求める第5の工程とを実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転子の位置検出方法及びこれを用いた電動機の制御方法並びに電動機制御装置に関するものである。
【背景技術】
【0002】
電動機が備える回転子の回転位置を検出し、検出した回転位置に基づいて当該電動機を制御する技術が実用化されている。回転位置を検出するセンサとしては例えばレゾルバが採用され、下掲の特許文献1等に開示されている。レゾルバは一次側コイル(回転子)と互いに90度離れた2つの二次側コイル(固定子)とを備え、一次側コイルに励磁信号として交流電圧を加えたときに二次側コイルにて発生する電圧を検出する。二次側コイルで検出される電圧の振幅は、回転子の回転角度に応じた正弦波及び余弦波で変調されたアナログ信号である。
【0003】
レゾルバには、二次側コイルで検出したアナログ信号(以下、「レゾルバ信号」とも称する)をデジタル信号に変換する変換器たるR/Dコンバータが取付けられる。そして、当該R/Dコンバータの中に異常検出部と自己診断回路を有する技術が提案されており、下掲の特許文献2等に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−219756号公報
【特許文献2】特開2005−345189号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献2で提案されているようにR/Dコンバータ自身が異常検出部及び自己診断回路を有していれば、レゾルバとR/Dコンバータとの間でケーブルの断線が生じた場合には、R/Dコンバータ自身が、当該ケーブルは断線状態にあると判断できる。これに対してR/Dコンバータ自身が断線状態を判断できない場合(すなわち、R/Dコンバータが異常検出部及び自己診断回路を有していない場合)には、断線状態であれば正常な信号は当然に検出されないので、単に何らかの異常が生じていることは分かるものの、その異常が断線によるものなのか、断線以外のレゾルバ等の異常によるものなのか、又は単にノイズ等の外乱によるものなのかを判別することが困難であり、誤動作の原因となる。
【0006】
本発明は、上記課題に鑑み、ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明に係る回転子の位置検出方法の第1の態様は、第1のセンサ(2)及び第2のセンサ(4)が設けられた電動機(10)を制御する方法であって、前記第1のセンサは前記回転子の回転位置を検出する回転位置検出器であり、前記第1のセンサ及び前記第2のセンサはいずれも共通のコネクタ(C1,C2)を介してそれぞれ第1のケーブル(6)及び第2のケーブル(8)で接続される処理部(20)において、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程(S101)と、前記品質に関する情報が正常であるか否かを判断する第2の工程(S102)と、前記第2の工程で肯定的結果が得られた場合に前記回転位置に関する情報に基づいて前記回転位置を演算する第3の工程(S103)と、前記第2の工程で否定的結果が得られた場合に、前記品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程(S104)と、前記第4の工程で否定的結果が得られた場合に、既に前記第3の工程で演算された前記回転位置に基づいて演算して補間することで、前記回転位置を得る第5の工程(S105)とが実行される、回転子の位置検出方法である。
【0008】
本発明に係る回転子の位置検出方法の第2の態様は、その第1の態様であって、前記第5の工程(S105)は、当該第5の工程よりも前に実行された前記第5の工程で求められた前記回転位置にも基づいて、前記回転位置を補間して求める。
【0009】
本発明に係る回転子の位置検出方法の第3の態様は、その第2の態様であって、前記第3の工程(S103)で演算された前記回転位置及び前記第5の工程(S105)で補間された前記回転位置を保存する第6の工程(S106)を有する。
【0010】
本発明に係る回転子の位置検出方法の第4の態様は、その第1から第3の態様のいずれかであって、前記第4の工程(S104)で肯定的結果が得られた場合に、前記第2のケーブルを介した前記第2のセンサからの第2の出力信号の信号状態が異常か否かを判断する第7の工程(S107)と、前記第7の工程で肯定的結果が得られた場合に、前記第1のケーブル(6)が断線状態か否かを判断する第8の工程(S108)と、前記第7の工程で否定的結果が得られた場合又は前記第8の工程で否定的結果が得られた場合には前記第1のセンサが異常状態にあると判断する。
【0011】
本発明に係る回転子の位置検出方法の第5の態様は、その第1から第4の態様のいずれかであって、前記第3の工程(S103)で演算された前記回転位置か又は、前記第5の工程(S105)で補間された前記回転位置に基づいて、前記電動機(10)の速度を演算する第9の工程(S112)を更に有する。
【0012】
本発明に係る回転子の位置検出方法の第6の態様は、その第1から第5の態様のいずれかであって、前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである。
【0013】
本発明に係る電動機の制御方法の第1の態様は、本発明に係る回転子の制御方法の第1から第6の態様のいずれか一つに記載の全工程と、前記第4の工程(S104)で肯定的結果が得られた場合に、前記電動機(10)の速度演算値を零に固定する第10の工程(S113)を有する、電動機の制御方法である。
【0014】
本発明に係る電動機制御装置の第1の態様は、電動機(10)に設けられる第1のセンサ(2)及び第2のセンサ(4)と、処理部(20)と、前記第1のセンサ及び前記第2のセンサの双方と前記処理部とを共通のコネクタ(C1,C2)を介して接続する第1のケーブル(6)及び第2のケーブル(8)と、前記処理部と前記第1及び第2のケーブルとの間に設けられ、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号に基づいて、前記第1の出力信号の品質に関する情報たる信号品質情報及び前記回転位置に関する情報たる位置情報を得る信号処理部(40)とを備え、前記第1のセンサは前記電動機の回転子の回転位置を検出する回転位置検出部であり、前記処理部は、前記信号品質情報に基づいて前記品質が正常か否かを判断する第1の判断部(22)と、前記位置情報に基づいて前記回転位置を演算する第1の演算部(24)と、前記第1の演算部で演算された前記回転位置を保存する保存部(26)と、前記品質が異常であると判断された場合に前記異常となる頻度が予め定められた規定値以上か否かを判断する第2の判断部(28)と、前記品質が異常であると判断された場合に、その直前の前記位置情報に基づいて演算されて前記保存部に保存されている前記回転位置に基づいて演算して補間することで、前記品質が異常であると判断された場合の前記回転位置を得る補間処理部(30)と、前記第1の判断部で肯定的結果が得られた場合には前記第1の演算部で演算された前記回転位置を選択し、前記第1の判断部で否定的結果が得られた場合には前記補間処理部で演算された前記回転位置を選択する第1の選択部(32)と、前記第1の選択部で選択された前記回転位置に基づいて前記回転子の回転速度を演算して速度演算値を算出する第2の演算部(34)と、前記第2の判断部で肯定的結果が得られた場合には前記第2の演算部が算出した前記速度演算値を選択し、前記第2の判断部で否定的結果が得られた場合には前記速度演算値として零を選択する第2の選択部(36)とを有する、電動機制御装置(100)である。
【0015】
本発明に係る電動機制御装置の第2の態様は、その第1の態様であって、前記信号処理部(40)はR/Dコンバータである。
【0016】
本発明に係る電動機制御装置の第3の態様は、その第1又は第2の態様であって、前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである。
【0017】
本発明に係るプログラムの第1の態様は、本発明に係る回転子の位置検出方法の第1から第6の態様のいずれかをコンピュータに実行させるプログラムである。
【0018】
本発明に係るプログラムの第1の態様は、本発明に係る電動機の制御方法の第1の態様をコンピュータに実行させるプログラムである。
【発明の効果】
【0019】
本発明に係る回転子の制御方法の第1の態様によれば、回転位置検出器からの第1の出力信号の品質が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、回転位置を補間演算するので、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0020】
本発明に係る回転子の制御方法の第2の態様によれば、補間して求められた回転位置にも基づいて回転位置を補間演算するので、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0021】
本発明に係る回転子の制御方法の第3の態様によれば、第4の工程で否定的結果が得られたときに、それまでの回転位置を保存しているので回転位置を補間することに資する。よって回転子の回転位置に基づく制御を滞りなく行うことに資する。
【0022】
本発明に係る回転子の制御方法の第4の態様によれば、第1のセンサが異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断できる。
【0023】
本発明に係る回転子の制御方法の第5の態様によれば、回転子の適切な制御に資する。
【0024】
一般にサーミスタは抵抗体が採用され、その構造は回転位置検出器よりも簡単である。そのため、第2のセンサ自体が異常状態に陥ることが少ない。本発明に係る回転子の制御方法の第6の態様によれば、第1のセンサが異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断することに資する。
【0025】
本発明に係る電動機の制御方法の第1の態様によれば、第1の出力信号の品質が異常となる頻度が予め定められた規定値以上である場合には当該第1の出力信号に基づいて演算される回転位置は電動機を制御する値として不適当である。このような場合には電動機を停止させることにより、不適当な回転位置に基づいた電動機制御が回避される。
【0026】
本発明に係る電動機制御装置の第1の態様によれば、第1の出力信号の品質が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、当該第1の出力信号に補間処理を実行するので、回転子の回転位置に基づく制御を滞りなく行うことができる。また、第1の出力信号の品質が異常となる頻度が予め定められた規定値以上である場合には、当該第1の出力信号に基づいて演算される回転位置は電動機を制御する値として不適当である。このような場合には電動機を停止させることにより、不適当な回転位置に基づいた電動機制御が回避される。
【0027】
本発明に係る電動機制御装置の第2の態様によれば、第1の態様の実施に資する。
【0028】
一般にサーミスタは抵抗体が採用され、その構造は回転位置検出器よりも簡単である。そのため、サーミスタ自体が異常状態に陥ることが、回転位置検出器自体が異常状態に陥ることよりも少ない。本発明に係る電動機制御装置の第3の態様によれば、回転位置検出器が異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断することに資する。
【0029】
本発明に係るプログラムの第1の態様によれば、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0030】
本発明に係るプログラムの第1の態様によれば、回転子の回転位置に基づく制御を滞りなく行うことができる。
【図面の簡単な説明】
【0031】
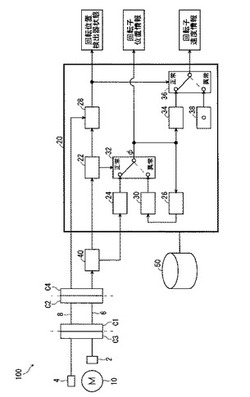
【図1】本発明の実施形態に係る電動機制御装置の構成を例示するブロック図である。
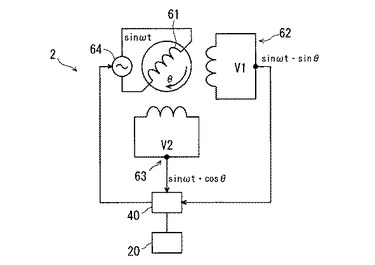
【図2】回転位置検出器を例示する概念図である。
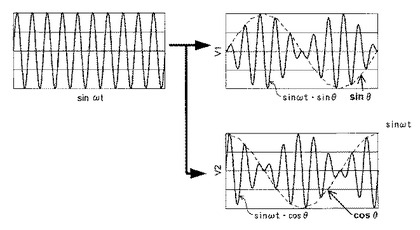
【図3】レゾルバ信号の波形を示す図である。
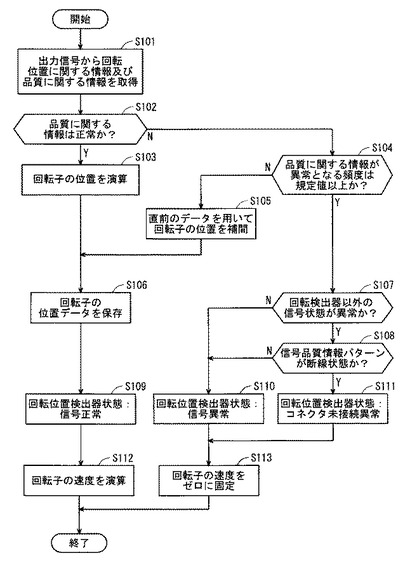
【図4】本発明の実施形態に係る電動機の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0032】
以下、本発明の好適な実施形態について、図面を参照しながら説明する。なお、図1を初めとする以下の図には、本発明に関係する要素のみを示す。
【0033】
〈装置構成の概要〉
図1に示すように、電動機制御装置100は、第1のセンサたる回転位置検出器2と、第2のセンサたるサーミスタ4と、処理部20と、信号処理部40と、プログラム記憶部50とを備えている。回転位置検出器2及びサーミスタ4はいずれも、相互に接続されている共通のコネクタC1,C3を介して第1及び第2のケーブル6,8に接続されている。第1及び第2のケーブル6,8は、相互に接続されている共通のコネクタC2,C4を介して処理部20及び信号処理部40に接続されている。なお、本実施形態では第1のケーブル6が回転位置検出器2が検出するレゾルバ信号(課題を解決するための手段における「第1の出力信号」に相当)を搬送し、第2のケーブル8がサーミスタ4が検出するサーミスタ信号(課題を解決するための手段における「第2の出力信号」)を搬送する態様を示しているが、共通のケーブルをタイムシェアリングして当該ケーブルがレゾルバ信号及びサーミスタ信号を搬送するようにしても良い。つまり、第1及び第2のケーブル6,8のいずれか一方が他方を兼ねるようにしても良い。
【0034】
回転位置検出器2は電動機10が備える回転子(図示省略)の回転位置に関する情報を検出するものであって、例えば次のようにして回転位置に関する情報を検出する。図2に示すように回転位置検出器2は回転子を貫通するシャフト(図示省略)上に設けられる励磁コイル61と、その周囲に設けられる第1及び第2の検出コイル62,63とを有している。ここで、第1及び第2の検出コイル62,63は互いに例えば90度離れて設けられている。図3に示すように、励磁コイル61に対して励磁信号(交流電圧)sinωtを入力すると、第1及び第2の検出コイル62,63では励磁コイル61の回転位置(回転角度)θに応じて、sinθ又はcosθに依存した2つの信号(交流電圧)sinωt・sinθ,sinωt・cosθを出力する。つまり、励磁コイル61を一次側コイルとして、第1及び第2の検出コイル62,63を二次側コイルとして把握できる。これらの信号sinωt・sinθ,sinωt・cosθ(以下、「一組のレゾルバ信号」と称する)が回転子の回転位置に関する情報(具体的には回転子の回転位置に応じた励磁コイル61の回転位置θ)として、コネクタC3,C1及びC2,C4によって接続される第1のケーブル6を介して、信号処理部40に入力される。なお、図2では、回転位置検出器2による励磁コイル61の回転位置θの検出原理の理解を助けるために、信号処理部40を介した処理部20からの指令に応じて交流電源64が励磁コイル61に励磁信号を入力するものとし、信号sinωt・sinθを第1の検出コイル62が検出して信号処理部40へ送出するものとし、信号sinωt・cosθを第2の検出コイル63が検出して信号処理部40へ送出するものとしている。
【0035】
信号処理部40に入力される一組のレゾルバ信号はアナログ信号である。信号処理部40は入力されたアナログ信号をデジタル信号に変換して、回転子の回転位置に関する情報たる位置情報及び当該一組のレゾルバ信号の品質に関する情報たる信号品質情報を処理部20へと入力する。このような信号処理部40としては例えばR/Dコンバータを採用できる。
【0036】
信号処理部40は一組のレゾルバ信号の品質が正常か否かを以下のようにして判断する。ここで、信号の品質が正常である、とは次に示す監視事項1−3のすべてにおいて否定的結果が得られることを意味する。また、信号の品質が異常である、とは監視事項1−3のいずれかにおいて肯定的結果が得られることを意味する。
【0037】
具体的には、次の3点を監視することによって、一組のレゾルバ信号の品質が正常か否かを判断する。まず一つは、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの振幅レベルが、予め定められた第1の閾値以下か否か(監視事項1)を監視する。もう一つは、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの振幅レベルが、予め定められた第2の閾値以上か否か(監視事項2)を監視する。もう一つは、一組のレゾルバ信号によって得られる出力角度(回転子の回転位置)φと励磁コイル61の回転位置θとの差が予め定められた第3の閾値以上(監視事項3)か否かを監視する。
【0038】
監視事項1を監視することにより、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθが減衰又は喪失しているか否かを判断できる。また、監視事項2を監視することにより、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの出力レベルが異常か否かを判断できる。また、監視事項3を監視することにより、回転位置φの精度が十分か否かを判断できる。
【0039】
回転位置φは一組のレゾルバ信号に基づいて、信号処理部40が次のようにして演算する。すなわち、まず一組のレゾルバ信号からtanθを得、その逆正接をとることで励磁コイル61の回転位置θを算出できる。ここで、逆正接関数が有する±90度での不連続点については、トラッキング処理を施して回転位置θを算出する。この励磁コイル61の回転位置θに基づいて、第1の演算部24が回転子の回転位置φ(図1参照)を算出する。
【0040】
つまり、一組のレゾルバ信号は、回転子の回転位置φに関する情報たる位置情報であるといえる。また、上述のとおり一組のレゾルバ信号を解析することによって、それ自身の品質が正常か否かを判断できるため、当該一組のレゾルバ信号は、それ自身の品質に関する情報たる信号品質情報であるともいえる。
【0041】
サーミスタ4は電動機10の温度を検出する。具体的には、サーミスタ4は温度に応じて電気抵抗値が比較的大きく変化する抵抗体であって、当該抵抗体を電動機10の近傍に設けることによって電動機10の温度を検出する。
【0042】
処理部20は、例えばマイコンが採用され、その機能ブロックとして、第1の判断部22、第1の演算部24、保存部26、第2の判断部28、補間処理部30、第1の選択部32、第2の演算部34、第2の選択部36及び、零出力部38を有している(図1参照)。なお、処理部20は必ずしもマイコンである必要はなく、CPUやメモリを含むコンピュータ(いずれも図示省略)であっても良い。
【0043】
信号品質情報を第1の判断部22が正常と判断した場合には、位置情報に基づいて第1の演算部24が演算した回転位置φを保存部26に保存する。具体的には、第1の判断部22の判断結果を受けて第1の選択部32が正常を選択し、保存部26が回転位置φを記憶する。
【0044】
第1の判断部22が、信号品質情報を正常ではないと判断した(すなわち、監視事項1,2,3のうち少なくとも一つが肯定的結果となり、品質が異常であると判断した)場合には、第2の判断部28が当該異常の頻度を検出しつつ、当該頻度が予め定められた規定値以上か否かを判断する。
【0045】
信号品質情報が異常となる頻度が予め定められた規定値未満の場合には、補間処理部30が、当該異常の直前の位置情報に基づいて演算されて保存部26に保存されている回転位置φに基づいて演算して補間することで、当該品質が異常であると判断された場合の回転位置φを得る。具体的には、第1の判断部22の判断結果を受けて第1の選択部32が異常を選択し、既に演算されて保存部26に記憶されている回転位置φに基づいて、当該品質が異常であると判断された場合の回転位置φを演算して補間する。このように、第1の演算部24によって回転位置φが演算されたか又は補間処理部30によって回転位置φが得られた場合には、回転位置検出器2の信号状態が正常(図4にいう「信号正常」)であると判断する。つまり、第1の選択部32の選択結果によって回転子の位置に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0046】
このように、信号品質情報が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、回転位置φに補間処理を実行するので、回転子の回転位置φに基づく制御を滞りなく行うことができる。
【0047】
第1の判断部22が信号品質情報を正常と判断した場合には、第1の判断部22は第2の判断部28に対して、信号品質情報は異常ではないという旨を送出する。また、信号品質情報を異常と判断した場合には、第1の判断部22は第2の判断部28に対して、信号品質情報が異常であるという旨を送出する。
【0048】
第2の判断部28は、回転位置検出器2以外の信号状態が異常か否かを判断する。具体的には例えば、サーミスタ4が検出するサーミスタ信号を受信して、当該サーミスタ信号の信号状態の異常の有無を判断する。より具体的には、電動機10の温度として想定される範囲に対応するサーミスタ信号の範囲から逸脱するサーミスタ信号を検出しているか否かを判断し、検出しているサーミスタ信号が当該範囲から逸脱していれば、回転位置検出器2以外の信号状態が異常であると判断し、そうでなければ、回転位置検出器2の信号状態が異常(図4にいう「信号異常」)であって回転位置検出器2以外の信号状態は正常であると判断する。
【0049】
第2の判断部28はまた、回転位置検出器2以外の信号状態が異常である場合に、信号品質情報の異常に対して、当該異常が、監視事項2で肯定的結果が得られたことによる異常か否かを判断する。当該異常が監視事項2で肯定的結果が得られたことによる異常であると判断された場合には、回転位置検出器2の状態として、コネクタC1,C2が未接続であるか又は、第1及び第2のケーブル6,8が断線している(図4にいう「コネクタ未接続異常」)と判断できる。一方、当該異常が監視事項2で肯定的結果が得られたことによる異常ではない、すなわち、監視事項1,3の少なくともいずれかで肯定的結果が得られたことによる異常であると判断された場合には、回転位置検出器2の信号状態が異常(同「信号異常」)であると判断する。
【0050】
このように、信号品質情報とともにサーミスタ4が検出するサーミスタ信号も監視することによって、回転位置検出器2の信号状態が異常なのかそれとも、第1及び第2のケーブル6,8の断線あるいはコネクタC1,C2の結線ミスであるかを判断できる。特に、サーミスタ4はその構造が回転位置検出器2の構造よりも簡単であるから、サーミスタ4自体が異常状態に何らかの異常状態に陥ることが少ない。よって、回転位置検出器2の信号状態が異常なのかそれとも、第1及び第2のケーブル6,8の断線あるいはコネクタC1,C2の結線ミスであるかを判断することに資する。
【0051】
第2の判断部28は、信号品質情報は異常ではないという旨を第1の判断部22から受信した場合、あるいは信号品質情報が異常である旨を受信しても、その発生頻度が予め定められた規定値未満であると判断された場合には回転位置検出器2が正常である旨を、第2の選択部36に送出する。また、第2の判断部28は、信号品質情報が異常である旨を受信したとしてもその発生頻度が予め定められた規定値以上であると判断された場合には回転位置検出器2が異常である旨を第2の選択部36に送出する。つまり、第1及び第2の判断部22,28での判断によって回転位置検出器2の状態に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0052】
第2の演算部34は、第1の選択部32に選択された回転位置φに基づいて回転子の速度を演算する。このように速度を演算すれば、電動機10の適切な制御に資する。
【0053】
第2の演算部34が算出した速度演算値は第2の選択部36に送出される。第2の選択部36にはまた、零出力部38が出力する零信号も送出される。
【0054】
回転位置検出器2の信号状態が異常ではない(すなわち、信号品質情報が正常であるか又は異常であったとしても、その発生頻度が予め定められた規定値未満である)場合には、第2の選択部36は第2の演算部34が演算した回転子の速度を採用してこれを送出する。一方、信号品質情報が異常となる頻度が当該規定値以上である場合、すなわち、第2の判断部28が回転位置検出器2の信号状態を異常であると判断した場合には、第2の選択部36は零出力部38の出力する零信号を採用して回転子の速度演算値を零に固定する。つまり、第2の選択部36の選択結果によって回転子の速度に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0055】
このように、信号品質情報が異常となる頻度が予め定められた規定値以上である場合には、位置情報に基づいて演算される回転位置φ及び回転位置φから算出される速度演算値は電動機10を制御する値として不適当である。このような場合には電動機10を停止させることにより、不適当な回転位置φに基づいた電動機制御が回避される。
【0056】
〈装置の動作〉
電動機制御装置100は、上述のような構成を備えることにより、図4に示すようなフローチャートに沿った動作を行う。なお、本フローチャートでは、電動機制御装置100が電動機10を制御するための動作、具体的には、回転位置検出器2の状態、回転子の回転位置φに関する情報及び回転子の速度に関する情報を取得するための動作のみを示し、その他の処理動作については図示及び説明を省略している。また、特に記載のない場合は、電動機制御装置100における一連の処理動作は、プログラム記憶部50に記憶されているプログラムに従って処理部20の制御下で自動的に行われる。
【0057】
まず、第1のケーブル6を介した回転位置検出器2からの回転子の回転位置φに関する位置情報を第1の演算部24が取得し、信号品質情報を第1の判断部22が取得する(ステップS101)。そして、第1の判断部22が、信号品質情報が正常か否かを判断する(ステップS102)。
【0058】
ステップS102において肯定的結果が得られた場合には、位置情報に基づいて第1の演算部24が回転子の回転位置φを演算する(ステップS103)。一方、ステップS102において否定的結果が得られた場合には、第2の判断部28が、品質が異常となる頻度が予め定められた規定値以上か否かを判断する(ステップS104)。
【0059】
ステップS104において否定的結果が得られた場合には、補間処理部30が、既に演算されて保存部26に記憶されている回転位置φに基づいて、当該頻度が当該規定値未満である場合の回転位置φを補間する(ステップS105)。
【0060】
ステップS103で第1の演算部24によって演算された回転位置φ及び、ステップS105で補間処理部30によって補間された回転位置φはいずれも、回転子の位置データとして保存部26に保存される(ステップS106)。保存された位置データは、以降の補間処理部30での補間演算に供される。つまり、ステップS105は当該ステップS105よりも前に実行されたステップS106で保存された回転位置φにも基づいて、回転位置φを補間して求める。このように、回転位置φを保存しているので、回転位置φを補間することに資する。また、補間して求められた回転位置φにも基づいて回転位置φを補間演算するので、回転子の回転位置φに基づく制御を滞りなく行うことができる。
【0061】
ステップS104において肯定的結果が得られた場合には、第2の判断部28が、回転位置検出器2以外の信号状態が異常か否かを判断する(ステップS107)。また、第2の判断部28が、ステップS107において肯定的結果が得られた場合に、信号品質情報の異常に対して、当該異常が監視事項2で肯定的結果が得られたことによる異常か否かを判断する(ステップS108)。
【0062】
ステップS108で肯定的結果が得られた場合には、回転位置検出器2の状態がコネクタ未接続異常であると判断する(ステップS111)。一方、ステップS108で否定的結果が得られた場合か又は、ステップS107で否定的結果が得られた場合には、回転位置検出器2の状態が信号異常であると判断する(ステップS110)。また、第1の演算部24によって回転位置φが演算されたか又は補間処理部30によって回転位置φが補間された場合には、回転位置検出器2の状態が信号正常であると判断する(ステップS109)。
【0063】
ステップS109において、回転位置検出器2の状態が信号正常であると判断された場合には、そのときの回転位置φに基づいて第2の演算部34が回転子の速度指令値を演算して第2の選択部36が当該速度演算値を選択する(ステップS112)。また、ステップS111において回転位置検出器2の状態がコネクタ未接続異常であると判断されたか又は、ステップS110において回転位置検出器2の状態が信号異常であると判断された場合には、零出力部38が零信号を出力して第2の選択部36が速度演算値を零に固定する(ステップS113)。
【0064】
〈変形例〉
以上、本発明の好適な態様について説明したが、本発明はこれに限定されるものではない。例えば、上記実施形態においては保存部26に保存されている直前の位置データにのみ基づいて補間するようにしているが、回転子の速度に基づいて位置データを予測し、これと直前の位置データとに基づいて補間するようにしても良い。このようにすれば、補間された回転位置φの精度を高めることに資する。
【符号の説明】
【0065】
C1,C2 コネクタ
S101−S110 工程
2 回転位置検出器(第1のセンサ)
4 サーミスタ(第2のセンサ)
6 第1のケーブル
8 第2のケーブル
10 電動機
20 処理部
22 第1の判断部
24 第1の演算部
26 保存部
28 第2の判断部
30 補間処理部
32 第1の選択部
34 第2の演算部
36 第2の選択部
38 零出力部
100 電動機制御装置
【技術分野】
【0001】
本発明は、回転子の位置検出方法及びこれを用いた電動機の制御方法並びに電動機制御装置に関するものである。
【背景技術】
【0002】
電動機が備える回転子の回転位置を検出し、検出した回転位置に基づいて当該電動機を制御する技術が実用化されている。回転位置を検出するセンサとしては例えばレゾルバが採用され、下掲の特許文献1等に開示されている。レゾルバは一次側コイル(回転子)と互いに90度離れた2つの二次側コイル(固定子)とを備え、一次側コイルに励磁信号として交流電圧を加えたときに二次側コイルにて発生する電圧を検出する。二次側コイルで検出される電圧の振幅は、回転子の回転角度に応じた正弦波及び余弦波で変調されたアナログ信号である。
【0003】
レゾルバには、二次側コイルで検出したアナログ信号(以下、「レゾルバ信号」とも称する)をデジタル信号に変換する変換器たるR/Dコンバータが取付けられる。そして、当該R/Dコンバータの中に異常検出部と自己診断回路を有する技術が提案されており、下掲の特許文献2等に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−219756号公報
【特許文献2】特開2005−345189号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献2で提案されているようにR/Dコンバータ自身が異常検出部及び自己診断回路を有していれば、レゾルバとR/Dコンバータとの間でケーブルの断線が生じた場合には、R/Dコンバータ自身が、当該ケーブルは断線状態にあると判断できる。これに対してR/Dコンバータ自身が断線状態を判断できない場合(すなわち、R/Dコンバータが異常検出部及び自己診断回路を有していない場合)には、断線状態であれば正常な信号は当然に検出されないので、単に何らかの異常が生じていることは分かるものの、その異常が断線によるものなのか、断線以外のレゾルバ等の異常によるものなのか、又は単にノイズ等の外乱によるものなのかを判別することが困難であり、誤動作の原因となる。
【0006】
本発明は、上記課題に鑑み、ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明に係る回転子の位置検出方法の第1の態様は、第1のセンサ(2)及び第2のセンサ(4)が設けられた電動機(10)を制御する方法であって、前記第1のセンサは前記回転子の回転位置を検出する回転位置検出器であり、前記第1のセンサ及び前記第2のセンサはいずれも共通のコネクタ(C1,C2)を介してそれぞれ第1のケーブル(6)及び第2のケーブル(8)で接続される処理部(20)において、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程(S101)と、前記品質に関する情報が正常であるか否かを判断する第2の工程(S102)と、前記第2の工程で肯定的結果が得られた場合に前記回転位置に関する情報に基づいて前記回転位置を演算する第3の工程(S103)と、前記第2の工程で否定的結果が得られた場合に、前記品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程(S104)と、前記第4の工程で否定的結果が得られた場合に、既に前記第3の工程で演算された前記回転位置に基づいて演算して補間することで、前記回転位置を得る第5の工程(S105)とが実行される、回転子の位置検出方法である。
【0008】
本発明に係る回転子の位置検出方法の第2の態様は、その第1の態様であって、前記第5の工程(S105)は、当該第5の工程よりも前に実行された前記第5の工程で求められた前記回転位置にも基づいて、前記回転位置を補間して求める。
【0009】
本発明に係る回転子の位置検出方法の第3の態様は、その第2の態様であって、前記第3の工程(S103)で演算された前記回転位置及び前記第5の工程(S105)で補間された前記回転位置を保存する第6の工程(S106)を有する。
【0010】
本発明に係る回転子の位置検出方法の第4の態様は、その第1から第3の態様のいずれかであって、前記第4の工程(S104)で肯定的結果が得られた場合に、前記第2のケーブルを介した前記第2のセンサからの第2の出力信号の信号状態が異常か否かを判断する第7の工程(S107)と、前記第7の工程で肯定的結果が得られた場合に、前記第1のケーブル(6)が断線状態か否かを判断する第8の工程(S108)と、前記第7の工程で否定的結果が得られた場合又は前記第8の工程で否定的結果が得られた場合には前記第1のセンサが異常状態にあると判断する。
【0011】
本発明に係る回転子の位置検出方法の第5の態様は、その第1から第4の態様のいずれかであって、前記第3の工程(S103)で演算された前記回転位置か又は、前記第5の工程(S105)で補間された前記回転位置に基づいて、前記電動機(10)の速度を演算する第9の工程(S112)を更に有する。
【0012】
本発明に係る回転子の位置検出方法の第6の態様は、その第1から第5の態様のいずれかであって、前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである。
【0013】
本発明に係る電動機の制御方法の第1の態様は、本発明に係る回転子の制御方法の第1から第6の態様のいずれか一つに記載の全工程と、前記第4の工程(S104)で肯定的結果が得られた場合に、前記電動機(10)の速度演算値を零に固定する第10の工程(S113)を有する、電動機の制御方法である。
【0014】
本発明に係る電動機制御装置の第1の態様は、電動機(10)に設けられる第1のセンサ(2)及び第2のセンサ(4)と、処理部(20)と、前記第1のセンサ及び前記第2のセンサの双方と前記処理部とを共通のコネクタ(C1,C2)を介して接続する第1のケーブル(6)及び第2のケーブル(8)と、前記処理部と前記第1及び第2のケーブルとの間に設けられ、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号に基づいて、前記第1の出力信号の品質に関する情報たる信号品質情報及び前記回転位置に関する情報たる位置情報を得る信号処理部(40)とを備え、前記第1のセンサは前記電動機の回転子の回転位置を検出する回転位置検出部であり、前記処理部は、前記信号品質情報に基づいて前記品質が正常か否かを判断する第1の判断部(22)と、前記位置情報に基づいて前記回転位置を演算する第1の演算部(24)と、前記第1の演算部で演算された前記回転位置を保存する保存部(26)と、前記品質が異常であると判断された場合に前記異常となる頻度が予め定められた規定値以上か否かを判断する第2の判断部(28)と、前記品質が異常であると判断された場合に、その直前の前記位置情報に基づいて演算されて前記保存部に保存されている前記回転位置に基づいて演算して補間することで、前記品質が異常であると判断された場合の前記回転位置を得る補間処理部(30)と、前記第1の判断部で肯定的結果が得られた場合には前記第1の演算部で演算された前記回転位置を選択し、前記第1の判断部で否定的結果が得られた場合には前記補間処理部で演算された前記回転位置を選択する第1の選択部(32)と、前記第1の選択部で選択された前記回転位置に基づいて前記回転子の回転速度を演算して速度演算値を算出する第2の演算部(34)と、前記第2の判断部で肯定的結果が得られた場合には前記第2の演算部が算出した前記速度演算値を選択し、前記第2の判断部で否定的結果が得られた場合には前記速度演算値として零を選択する第2の選択部(36)とを有する、電動機制御装置(100)である。
【0015】
本発明に係る電動機制御装置の第2の態様は、その第1の態様であって、前記信号処理部(40)はR/Dコンバータである。
【0016】
本発明に係る電動機制御装置の第3の態様は、その第1又は第2の態様であって、前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである。
【0017】
本発明に係るプログラムの第1の態様は、本発明に係る回転子の位置検出方法の第1から第6の態様のいずれかをコンピュータに実行させるプログラムである。
【0018】
本発明に係るプログラムの第1の態様は、本発明に係る電動機の制御方法の第1の態様をコンピュータに実行させるプログラムである。
【発明の効果】
【0019】
本発明に係る回転子の制御方法の第1の態様によれば、回転位置検出器からの第1の出力信号の品質が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、回転位置を補間演算するので、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0020】
本発明に係る回転子の制御方法の第2の態様によれば、補間して求められた回転位置にも基づいて回転位置を補間演算するので、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0021】
本発明に係る回転子の制御方法の第3の態様によれば、第4の工程で否定的結果が得られたときに、それまでの回転位置を保存しているので回転位置を補間することに資する。よって回転子の回転位置に基づく制御を滞りなく行うことに資する。
【0022】
本発明に係る回転子の制御方法の第4の態様によれば、第1のセンサが異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断できる。
【0023】
本発明に係る回転子の制御方法の第5の態様によれば、回転子の適切な制御に資する。
【0024】
一般にサーミスタは抵抗体が採用され、その構造は回転位置検出器よりも簡単である。そのため、第2のセンサ自体が異常状態に陥ることが少ない。本発明に係る回転子の制御方法の第6の態様によれば、第1のセンサが異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断することに資する。
【0025】
本発明に係る電動機の制御方法の第1の態様によれば、第1の出力信号の品質が異常となる頻度が予め定められた規定値以上である場合には当該第1の出力信号に基づいて演算される回転位置は電動機を制御する値として不適当である。このような場合には電動機を停止させることにより、不適当な回転位置に基づいた電動機制御が回避される。
【0026】
本発明に係る電動機制御装置の第1の態様によれば、第1の出力信号の品質が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、当該第1の出力信号に補間処理を実行するので、回転子の回転位置に基づく制御を滞りなく行うことができる。また、第1の出力信号の品質が異常となる頻度が予め定められた規定値以上である場合には、当該第1の出力信号に基づいて演算される回転位置は電動機を制御する値として不適当である。このような場合には電動機を停止させることにより、不適当な回転位置に基づいた電動機制御が回避される。
【0027】
本発明に係る電動機制御装置の第2の態様によれば、第1の態様の実施に資する。
【0028】
一般にサーミスタは抵抗体が採用され、その構造は回転位置検出器よりも簡単である。そのため、サーミスタ自体が異常状態に陥ることが、回転位置検出器自体が異常状態に陥ることよりも少ない。本発明に係る電動機制御装置の第3の態様によれば、回転位置検出器が異常状態にあるのかそれとも、ケーブルの断線あるいはコネクタの結線ミスであるかを判断することに資する。
【0029】
本発明に係るプログラムの第1の態様によれば、回転子の回転位置に基づく制御を滞りなく行うことができる。
【0030】
本発明に係るプログラムの第1の態様によれば、回転子の回転位置に基づく制御を滞りなく行うことができる。
【図面の簡単な説明】
【0031】
【図1】本発明の実施形態に係る電動機制御装置の構成を例示するブロック図である。
【図2】回転位置検出器を例示する概念図である。
【図3】レゾルバ信号の波形を示す図である。
【図4】本発明の実施形態に係る電動機の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0032】
以下、本発明の好適な実施形態について、図面を参照しながら説明する。なお、図1を初めとする以下の図には、本発明に関係する要素のみを示す。
【0033】
〈装置構成の概要〉
図1に示すように、電動機制御装置100は、第1のセンサたる回転位置検出器2と、第2のセンサたるサーミスタ4と、処理部20と、信号処理部40と、プログラム記憶部50とを備えている。回転位置検出器2及びサーミスタ4はいずれも、相互に接続されている共通のコネクタC1,C3を介して第1及び第2のケーブル6,8に接続されている。第1及び第2のケーブル6,8は、相互に接続されている共通のコネクタC2,C4を介して処理部20及び信号処理部40に接続されている。なお、本実施形態では第1のケーブル6が回転位置検出器2が検出するレゾルバ信号(課題を解決するための手段における「第1の出力信号」に相当)を搬送し、第2のケーブル8がサーミスタ4が検出するサーミスタ信号(課題を解決するための手段における「第2の出力信号」)を搬送する態様を示しているが、共通のケーブルをタイムシェアリングして当該ケーブルがレゾルバ信号及びサーミスタ信号を搬送するようにしても良い。つまり、第1及び第2のケーブル6,8のいずれか一方が他方を兼ねるようにしても良い。
【0034】
回転位置検出器2は電動機10が備える回転子(図示省略)の回転位置に関する情報を検出するものであって、例えば次のようにして回転位置に関する情報を検出する。図2に示すように回転位置検出器2は回転子を貫通するシャフト(図示省略)上に設けられる励磁コイル61と、その周囲に設けられる第1及び第2の検出コイル62,63とを有している。ここで、第1及び第2の検出コイル62,63は互いに例えば90度離れて設けられている。図3に示すように、励磁コイル61に対して励磁信号(交流電圧)sinωtを入力すると、第1及び第2の検出コイル62,63では励磁コイル61の回転位置(回転角度)θに応じて、sinθ又はcosθに依存した2つの信号(交流電圧)sinωt・sinθ,sinωt・cosθを出力する。つまり、励磁コイル61を一次側コイルとして、第1及び第2の検出コイル62,63を二次側コイルとして把握できる。これらの信号sinωt・sinθ,sinωt・cosθ(以下、「一組のレゾルバ信号」と称する)が回転子の回転位置に関する情報(具体的には回転子の回転位置に応じた励磁コイル61の回転位置θ)として、コネクタC3,C1及びC2,C4によって接続される第1のケーブル6を介して、信号処理部40に入力される。なお、図2では、回転位置検出器2による励磁コイル61の回転位置θの検出原理の理解を助けるために、信号処理部40を介した処理部20からの指令に応じて交流電源64が励磁コイル61に励磁信号を入力するものとし、信号sinωt・sinθを第1の検出コイル62が検出して信号処理部40へ送出するものとし、信号sinωt・cosθを第2の検出コイル63が検出して信号処理部40へ送出するものとしている。
【0035】
信号処理部40に入力される一組のレゾルバ信号はアナログ信号である。信号処理部40は入力されたアナログ信号をデジタル信号に変換して、回転子の回転位置に関する情報たる位置情報及び当該一組のレゾルバ信号の品質に関する情報たる信号品質情報を処理部20へと入力する。このような信号処理部40としては例えばR/Dコンバータを採用できる。
【0036】
信号処理部40は一組のレゾルバ信号の品質が正常か否かを以下のようにして判断する。ここで、信号の品質が正常である、とは次に示す監視事項1−3のすべてにおいて否定的結果が得られることを意味する。また、信号の品質が異常である、とは監視事項1−3のいずれかにおいて肯定的結果が得られることを意味する。
【0037】
具体的には、次の3点を監視することによって、一組のレゾルバ信号の品質が正常か否かを判断する。まず一つは、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの振幅レベルが、予め定められた第1の閾値以下か否か(監視事項1)を監視する。もう一つは、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの振幅レベルが、予め定められた第2の閾値以上か否か(監視事項2)を監視する。もう一つは、一組のレゾルバ信号によって得られる出力角度(回転子の回転位置)φと励磁コイル61の回転位置θとの差が予め定められた第3の閾値以上(監視事項3)か否かを監視する。
【0038】
監視事項1を監視することにより、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθが減衰又は喪失しているか否かを判断できる。また、監視事項2を監視することにより、それぞれのレゾルバ信号sinωt・sinθ,sinωt・cosθの出力レベルが異常か否かを判断できる。また、監視事項3を監視することにより、回転位置φの精度が十分か否かを判断できる。
【0039】
回転位置φは一組のレゾルバ信号に基づいて、信号処理部40が次のようにして演算する。すなわち、まず一組のレゾルバ信号からtanθを得、その逆正接をとることで励磁コイル61の回転位置θを算出できる。ここで、逆正接関数が有する±90度での不連続点については、トラッキング処理を施して回転位置θを算出する。この励磁コイル61の回転位置θに基づいて、第1の演算部24が回転子の回転位置φ(図1参照)を算出する。
【0040】
つまり、一組のレゾルバ信号は、回転子の回転位置φに関する情報たる位置情報であるといえる。また、上述のとおり一組のレゾルバ信号を解析することによって、それ自身の品質が正常か否かを判断できるため、当該一組のレゾルバ信号は、それ自身の品質に関する情報たる信号品質情報であるともいえる。
【0041】
サーミスタ4は電動機10の温度を検出する。具体的には、サーミスタ4は温度に応じて電気抵抗値が比較的大きく変化する抵抗体であって、当該抵抗体を電動機10の近傍に設けることによって電動機10の温度を検出する。
【0042】
処理部20は、例えばマイコンが採用され、その機能ブロックとして、第1の判断部22、第1の演算部24、保存部26、第2の判断部28、補間処理部30、第1の選択部32、第2の演算部34、第2の選択部36及び、零出力部38を有している(図1参照)。なお、処理部20は必ずしもマイコンである必要はなく、CPUやメモリを含むコンピュータ(いずれも図示省略)であっても良い。
【0043】
信号品質情報を第1の判断部22が正常と判断した場合には、位置情報に基づいて第1の演算部24が演算した回転位置φを保存部26に保存する。具体的には、第1の判断部22の判断結果を受けて第1の選択部32が正常を選択し、保存部26が回転位置φを記憶する。
【0044】
第1の判断部22が、信号品質情報を正常ではないと判断した(すなわち、監視事項1,2,3のうち少なくとも一つが肯定的結果となり、品質が異常であると判断した)場合には、第2の判断部28が当該異常の頻度を検出しつつ、当該頻度が予め定められた規定値以上か否かを判断する。
【0045】
信号品質情報が異常となる頻度が予め定められた規定値未満の場合には、補間処理部30が、当該異常の直前の位置情報に基づいて演算されて保存部26に保存されている回転位置φに基づいて演算して補間することで、当該品質が異常であると判断された場合の回転位置φを得る。具体的には、第1の判断部22の判断結果を受けて第1の選択部32が異常を選択し、既に演算されて保存部26に記憶されている回転位置φに基づいて、当該品質が異常であると判断された場合の回転位置φを演算して補間する。このように、第1の演算部24によって回転位置φが演算されたか又は補間処理部30によって回転位置φが得られた場合には、回転位置検出器2の信号状態が正常(図4にいう「信号正常」)であると判断する。つまり、第1の選択部32の選択結果によって回転子の位置に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0046】
このように、信号品質情報が異常であると判断されてもその発生頻度が予め定められた規定値未満であると判断されれば、回転位置φに補間処理を実行するので、回転子の回転位置φに基づく制御を滞りなく行うことができる。
【0047】
第1の判断部22が信号品質情報を正常と判断した場合には、第1の判断部22は第2の判断部28に対して、信号品質情報は異常ではないという旨を送出する。また、信号品質情報を異常と判断した場合には、第1の判断部22は第2の判断部28に対して、信号品質情報が異常であるという旨を送出する。
【0048】
第2の判断部28は、回転位置検出器2以外の信号状態が異常か否かを判断する。具体的には例えば、サーミスタ4が検出するサーミスタ信号を受信して、当該サーミスタ信号の信号状態の異常の有無を判断する。より具体的には、電動機10の温度として想定される範囲に対応するサーミスタ信号の範囲から逸脱するサーミスタ信号を検出しているか否かを判断し、検出しているサーミスタ信号が当該範囲から逸脱していれば、回転位置検出器2以外の信号状態が異常であると判断し、そうでなければ、回転位置検出器2の信号状態が異常(図4にいう「信号異常」)であって回転位置検出器2以外の信号状態は正常であると判断する。
【0049】
第2の判断部28はまた、回転位置検出器2以外の信号状態が異常である場合に、信号品質情報の異常に対して、当該異常が、監視事項2で肯定的結果が得られたことによる異常か否かを判断する。当該異常が監視事項2で肯定的結果が得られたことによる異常であると判断された場合には、回転位置検出器2の状態として、コネクタC1,C2が未接続であるか又は、第1及び第2のケーブル6,8が断線している(図4にいう「コネクタ未接続異常」)と判断できる。一方、当該異常が監視事項2で肯定的結果が得られたことによる異常ではない、すなわち、監視事項1,3の少なくともいずれかで肯定的結果が得られたことによる異常であると判断された場合には、回転位置検出器2の信号状態が異常(同「信号異常」)であると判断する。
【0050】
このように、信号品質情報とともにサーミスタ4が検出するサーミスタ信号も監視することによって、回転位置検出器2の信号状態が異常なのかそれとも、第1及び第2のケーブル6,8の断線あるいはコネクタC1,C2の結線ミスであるかを判断できる。特に、サーミスタ4はその構造が回転位置検出器2の構造よりも簡単であるから、サーミスタ4自体が異常状態に何らかの異常状態に陥ることが少ない。よって、回転位置検出器2の信号状態が異常なのかそれとも、第1及び第2のケーブル6,8の断線あるいはコネクタC1,C2の結線ミスであるかを判断することに資する。
【0051】
第2の判断部28は、信号品質情報は異常ではないという旨を第1の判断部22から受信した場合、あるいは信号品質情報が異常である旨を受信しても、その発生頻度が予め定められた規定値未満であると判断された場合には回転位置検出器2が正常である旨を、第2の選択部36に送出する。また、第2の判断部28は、信号品質情報が異常である旨を受信したとしてもその発生頻度が予め定められた規定値以上であると判断された場合には回転位置検出器2が異常である旨を第2の選択部36に送出する。つまり、第1及び第2の判断部22,28での判断によって回転位置検出器2の状態に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0052】
第2の演算部34は、第1の選択部32に選択された回転位置φに基づいて回転子の速度を演算する。このように速度を演算すれば、電動機10の適切な制御に資する。
【0053】
第2の演算部34が算出した速度演算値は第2の選択部36に送出される。第2の選択部36にはまた、零出力部38が出力する零信号も送出される。
【0054】
回転位置検出器2の信号状態が異常ではない(すなわち、信号品質情報が正常であるか又は異常であったとしても、その発生頻度が予め定められた規定値未満である)場合には、第2の選択部36は第2の演算部34が演算した回転子の速度を採用してこれを送出する。一方、信号品質情報が異常となる頻度が当該規定値以上である場合、すなわち、第2の判断部28が回転位置検出器2の信号状態を異常であると判断した場合には、第2の選択部36は零出力部38の出力する零信号を採用して回転子の速度演算値を零に固定する。つまり、第2の選択部36の選択結果によって回転子の速度に関する情報を得ることができる。これにより、電動機10を制御することに資する。
【0055】
このように、信号品質情報が異常となる頻度が予め定められた規定値以上である場合には、位置情報に基づいて演算される回転位置φ及び回転位置φから算出される速度演算値は電動機10を制御する値として不適当である。このような場合には電動機10を停止させることにより、不適当な回転位置φに基づいた電動機制御が回避される。
【0056】
〈装置の動作〉
電動機制御装置100は、上述のような構成を備えることにより、図4に示すようなフローチャートに沿った動作を行う。なお、本フローチャートでは、電動機制御装置100が電動機10を制御するための動作、具体的には、回転位置検出器2の状態、回転子の回転位置φに関する情報及び回転子の速度に関する情報を取得するための動作のみを示し、その他の処理動作については図示及び説明を省略している。また、特に記載のない場合は、電動機制御装置100における一連の処理動作は、プログラム記憶部50に記憶されているプログラムに従って処理部20の制御下で自動的に行われる。
【0057】
まず、第1のケーブル6を介した回転位置検出器2からの回転子の回転位置φに関する位置情報を第1の演算部24が取得し、信号品質情報を第1の判断部22が取得する(ステップS101)。そして、第1の判断部22が、信号品質情報が正常か否かを判断する(ステップS102)。
【0058】
ステップS102において肯定的結果が得られた場合には、位置情報に基づいて第1の演算部24が回転子の回転位置φを演算する(ステップS103)。一方、ステップS102において否定的結果が得られた場合には、第2の判断部28が、品質が異常となる頻度が予め定められた規定値以上か否かを判断する(ステップS104)。
【0059】
ステップS104において否定的結果が得られた場合には、補間処理部30が、既に演算されて保存部26に記憶されている回転位置φに基づいて、当該頻度が当該規定値未満である場合の回転位置φを補間する(ステップS105)。
【0060】
ステップS103で第1の演算部24によって演算された回転位置φ及び、ステップS105で補間処理部30によって補間された回転位置φはいずれも、回転子の位置データとして保存部26に保存される(ステップS106)。保存された位置データは、以降の補間処理部30での補間演算に供される。つまり、ステップS105は当該ステップS105よりも前に実行されたステップS106で保存された回転位置φにも基づいて、回転位置φを補間して求める。このように、回転位置φを保存しているので、回転位置φを補間することに資する。また、補間して求められた回転位置φにも基づいて回転位置φを補間演算するので、回転子の回転位置φに基づく制御を滞りなく行うことができる。
【0061】
ステップS104において肯定的結果が得られた場合には、第2の判断部28が、回転位置検出器2以外の信号状態が異常か否かを判断する(ステップS107)。また、第2の判断部28が、ステップS107において肯定的結果が得られた場合に、信号品質情報の異常に対して、当該異常が監視事項2で肯定的結果が得られたことによる異常か否かを判断する(ステップS108)。
【0062】
ステップS108で肯定的結果が得られた場合には、回転位置検出器2の状態がコネクタ未接続異常であると判断する(ステップS111)。一方、ステップS108で否定的結果が得られた場合か又は、ステップS107で否定的結果が得られた場合には、回転位置検出器2の状態が信号異常であると判断する(ステップS110)。また、第1の演算部24によって回転位置φが演算されたか又は補間処理部30によって回転位置φが補間された場合には、回転位置検出器2の状態が信号正常であると判断する(ステップS109)。
【0063】
ステップS109において、回転位置検出器2の状態が信号正常であると判断された場合には、そのときの回転位置φに基づいて第2の演算部34が回転子の速度指令値を演算して第2の選択部36が当該速度演算値を選択する(ステップS112)。また、ステップS111において回転位置検出器2の状態がコネクタ未接続異常であると判断されたか又は、ステップS110において回転位置検出器2の状態が信号異常であると判断された場合には、零出力部38が零信号を出力して第2の選択部36が速度演算値を零に固定する(ステップS113)。
【0064】
〈変形例〉
以上、本発明の好適な態様について説明したが、本発明はこれに限定されるものではない。例えば、上記実施形態においては保存部26に保存されている直前の位置データにのみ基づいて補間するようにしているが、回転子の速度に基づいて位置データを予測し、これと直前の位置データとに基づいて補間するようにしても良い。このようにすれば、補間された回転位置φの精度を高めることに資する。
【符号の説明】
【0065】
C1,C2 コネクタ
S101−S110 工程
2 回転位置検出器(第1のセンサ)
4 サーミスタ(第2のセンサ)
6 第1のケーブル
8 第2のケーブル
10 電動機
20 処理部
22 第1の判断部
24 第1の演算部
26 保存部
28 第2の判断部
30 補間処理部
32 第1の選択部
34 第2の演算部
36 第2の選択部
38 零出力部
100 電動機制御装置
【特許請求の範囲】
【請求項1】
第1のセンサ(2)及び第2のセンサ(4)が設けられた電動機(10)を制御する方法であって、
前記第1のセンサは前記回転子の回転位置を検出する回転位置検出器であり、
前記第1のセンサ及び前記第2のセンサはいずれも共通のコネクタ(C1,C2)を介してそれぞれ第1のケーブル(6)及び第2のケーブル(8)で接続される処理部(20)において、
前記第1のケーブルを介した前記第1のセンサからの第1の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程(S101)と、
前記品質に関する情報が正常であるか否かを判断する第2の工程(S102)と、
前記第2の工程で肯定的結果が得られた場合に前記回転位置に関する情報に基づいて前記回転位置を演算する第3の工程(S103)と、
前記第2の工程で否定的結果が得られた場合に、前記品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程(S104)と、
前記第4の工程で否定的結果が得られた場合に、既に前記第3の工程で演算された前記回転位置に基づいて演算して補間することで、前記回転位置を得る第5の工程(S105)と
が実行される、回転子の位置検出方法。
【請求項2】
前記第5の工程(S105)は、
当該第5の工程よりも前に実行された前記第5の工程で求められた前記回転位置にも基づいて、前記回転位置を補間して求める、
請求項1記載の回転子の位置検出方法。
【請求項3】
前記第3の工程(S103)で演算された前記回転位置及び前記第5の工程(S105)で補間された前記回転位置を保存する第6の工程(S106)を有する、
請求項2記載の回転子の位置検出方法。
【請求項4】
前記第4の工程(S104)で肯定的結果が得られた場合に、前記第2のケーブルを介した前記第2のセンサからの第2の出力信号の信号状態が異常か否かを判断する第7の工程(S107)と、
前記第7の工程で肯定的結果が得られた場合に、前記第1のケーブル(6)が断線状態か否かを判断する第8の工程(S108)と、
前記第7の工程で否定的結果が得られた場合又は前記第8の工程で否定的結果が得られた場合には前記第1のセンサが異常状態にあると判断する、
請求項1から請求項3のいずれか記載の回転子の位置検出方法。
【請求項5】
前記第3の工程(S103)で演算された前記回転位置か又は、前記第5の工程(S105)で補間された前記回転位置に基づいて、前記電動機(10)の速度を演算する第9の工程(S112)を更に有する、
請求項1から請求項4のいずれか記載の回転子の位置検出方法。
【請求項6】
前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである、
請求項1から請求項5のいずれか記載の回転子の位置検出方法。
【請求項7】
請求項1から請求項6のいずれか一つに記載の回転子の制御方法の全工程と、
前記第4の工程(S104)で肯定的結果が得られた場合に、前記電動機(10)の速度演算値を零に固定する第10の工程(S113)を有する、
電動機の制御方法。
【請求項8】
電動機(10)に設けられる第1のセンサ(2)及び第2のセンサ(4)と、
処理部(20)と、
前記第1のセンサ及び前記第2のセンサの双方と前記処理部とを共通のコネクタ(C1,C2)を介して接続する第1のケーブル(6)及び第2のケーブル(8)と、
前記処理部と前記第1及び第2のケーブルとの間に設けられ、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号に基づいて、前記第1の出力信号の品質に関する情報たる信号品質情報及び前記回転位置に関する情報たる位置情報を得る信号処理部(40)と
を備え、
前記第1のセンサは前記電動機の回転子の回転位置を検出する回転位置検出部であり、
前記処理部は、
前記信号品質情報に基づいて前記品質が正常か否かを判断する第1の判断部(22)と、
前記位置情報に基づいて前記回転位置を演算する第1の演算部(24)と、
前記第1の演算部で演算された前記回転位置を保存する保存部(26)と、
前記品質が異常であると判断された場合に前記異常となる頻度が予め定められた規定値以上か否かを判断する第2の判断部(28)と、
前記品質が異常であると判断された場合に、その直前の前記位置情報に基づいて演算されて前記保存部に保存されている前記回転位置に基づいて演算して補間することで、前記品質が異常であると判断された場合の前記回転位置を得る補間処理部(30)と、
前記第1の判断部で肯定的結果が得られた場合には前記第1の演算部で演算された前記回転位置を選択し、前記第1の判断部で否定的結果が得られた場合には前記補間処理部で演算された前記回転位置を選択する第1の選択部(32)と、
前記第1の選択部で選択された前記回転位置に基づいて前記回転子の回転速度を演算して速度演算値を算出する第2の演算部(34)と、
前記第2の判断部で肯定的結果が得られた場合には前記第2の演算部が算出した前記速度演算値を選択し、前記第2の判断部で否定的結果が得られた場合には前記速度演算値として零を選択する第2の選択部(36)と
を有する、電動機制御装置(100)。
【請求項9】
前記信号処理部(40)はR/Dコンバータである、
請求項8記載の電動機制御装置(100)。
【請求項10】
前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである、
請求項8又は請求項9記載の電動機制御装置(100)。
【請求項11】
請求項1から請求項6のいずれか記載の回転子の位置検出方法をコンピュータに実行させるプログラム。
【請求項12】
請求項7記載の電動機の制御方法をコンピュータに実行させるプログラム。
【請求項1】
第1のセンサ(2)及び第2のセンサ(4)が設けられた電動機(10)を制御する方法であって、
前記第1のセンサは前記回転子の回転位置を検出する回転位置検出器であり、
前記第1のセンサ及び前記第2のセンサはいずれも共通のコネクタ(C1,C2)を介してそれぞれ第1のケーブル(6)及び第2のケーブル(8)で接続される処理部(20)において、
前記第1のケーブルを介した前記第1のセンサからの第1の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程(S101)と、
前記品質に関する情報が正常であるか否かを判断する第2の工程(S102)と、
前記第2の工程で肯定的結果が得られた場合に前記回転位置に関する情報に基づいて前記回転位置を演算する第3の工程(S103)と、
前記第2の工程で否定的結果が得られた場合に、前記品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程(S104)と、
前記第4の工程で否定的結果が得られた場合に、既に前記第3の工程で演算された前記回転位置に基づいて演算して補間することで、前記回転位置を得る第5の工程(S105)と
が実行される、回転子の位置検出方法。
【請求項2】
前記第5の工程(S105)は、
当該第5の工程よりも前に実行された前記第5の工程で求められた前記回転位置にも基づいて、前記回転位置を補間して求める、
請求項1記載の回転子の位置検出方法。
【請求項3】
前記第3の工程(S103)で演算された前記回転位置及び前記第5の工程(S105)で補間された前記回転位置を保存する第6の工程(S106)を有する、
請求項2記載の回転子の位置検出方法。
【請求項4】
前記第4の工程(S104)で肯定的結果が得られた場合に、前記第2のケーブルを介した前記第2のセンサからの第2の出力信号の信号状態が異常か否かを判断する第7の工程(S107)と、
前記第7の工程で肯定的結果が得られた場合に、前記第1のケーブル(6)が断線状態か否かを判断する第8の工程(S108)と、
前記第7の工程で否定的結果が得られた場合又は前記第8の工程で否定的結果が得られた場合には前記第1のセンサが異常状態にあると判断する、
請求項1から請求項3のいずれか記載の回転子の位置検出方法。
【請求項5】
前記第3の工程(S103)で演算された前記回転位置か又は、前記第5の工程(S105)で補間された前記回転位置に基づいて、前記電動機(10)の速度を演算する第9の工程(S112)を更に有する、
請求項1から請求項4のいずれか記載の回転子の位置検出方法。
【請求項6】
前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである、
請求項1から請求項5のいずれか記載の回転子の位置検出方法。
【請求項7】
請求項1から請求項6のいずれか一つに記載の回転子の制御方法の全工程と、
前記第4の工程(S104)で肯定的結果が得られた場合に、前記電動機(10)の速度演算値を零に固定する第10の工程(S113)を有する、
電動機の制御方法。
【請求項8】
電動機(10)に設けられる第1のセンサ(2)及び第2のセンサ(4)と、
処理部(20)と、
前記第1のセンサ及び前記第2のセンサの双方と前記処理部とを共通のコネクタ(C1,C2)を介して接続する第1のケーブル(6)及び第2のケーブル(8)と、
前記処理部と前記第1及び第2のケーブルとの間に設けられ、前記第1のケーブルを介した前記第1のセンサからの第1の出力信号に基づいて、前記第1の出力信号の品質に関する情報たる信号品質情報及び前記回転位置に関する情報たる位置情報を得る信号処理部(40)と
を備え、
前記第1のセンサは前記電動機の回転子の回転位置を検出する回転位置検出部であり、
前記処理部は、
前記信号品質情報に基づいて前記品質が正常か否かを判断する第1の判断部(22)と、
前記位置情報に基づいて前記回転位置を演算する第1の演算部(24)と、
前記第1の演算部で演算された前記回転位置を保存する保存部(26)と、
前記品質が異常であると判断された場合に前記異常となる頻度が予め定められた規定値以上か否かを判断する第2の判断部(28)と、
前記品質が異常であると判断された場合に、その直前の前記位置情報に基づいて演算されて前記保存部に保存されている前記回転位置に基づいて演算して補間することで、前記品質が異常であると判断された場合の前記回転位置を得る補間処理部(30)と、
前記第1の判断部で肯定的結果が得られた場合には前記第1の演算部で演算された前記回転位置を選択し、前記第1の判断部で否定的結果が得られた場合には前記補間処理部で演算された前記回転位置を選択する第1の選択部(32)と、
前記第1の選択部で選択された前記回転位置に基づいて前記回転子の回転速度を演算して速度演算値を算出する第2の演算部(34)と、
前記第2の判断部で肯定的結果が得られた場合には前記第2の演算部が算出した前記速度演算値を選択し、前記第2の判断部で否定的結果が得られた場合には前記速度演算値として零を選択する第2の選択部(36)と
を有する、電動機制御装置(100)。
【請求項9】
前記信号処理部(40)はR/Dコンバータである、
請求項8記載の電動機制御装置(100)。
【請求項10】
前記第2のセンサ(4)は前記電動機(10)の温度を検出するサーミスタである、
請求項8又は請求項9記載の電動機制御装置(100)。
【請求項11】
請求項1から請求項6のいずれか記載の回転子の位置検出方法をコンピュータに実行させるプログラム。
【請求項12】
請求項7記載の電動機の制御方法をコンピュータに実行させるプログラム。
【図1】



【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−95490(P2012−95490A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−242229(P2010−242229)
【出願日】平成22年10月28日(2010.10.28)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月28日(2010.10.28)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
[ Back to top ]