
回転振動位相検出装置及び方法
【課題】回転振動を検出するセンサから振動信号が出力されるまでの信号位相のずれを補正でき回転基準位置の検出ができるとともに、直流信号レベルを相殺でき所望回転数における振動信号を取得することができる回転振動位相検出装置を提供することである。
【解決手段】 回転機器の回転部の振動変位を検出する振動センサ12と、回転機器の回転部の回転基準信号を検出する回転基準センサ13と、振動センサ12で検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置14とを備える。
【解決手段】 回転機器の回転部の振動変位を検出する振動センサ12と、回転機器の回転部の回転基準信号を検出する回転基準センサ13と、振動センサ12で検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置14とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転機器の回転部に発生する振動を検出し、回転のアンバランス成分を評価するための回転振動位相検出装置及び方法に関するものである。
【背景技術】
【0002】
タービン、発電機、電動機などの回転機器においては、回転部分のアンバランス等により回転軸が大きく振動することがあるため、回転機器の回転振動を検出し、振動による異常を診断している。回転機の軸受診断装置として、複数のファイルの中から振動信号とこれに対応した診断情報を正確に読み出して軸受診断を行うことができるようにしたものがある(例えば、特許文献1参照)。
【0003】
回転機器の回転部のアンバランスを検出するには回転機器の振動変位を検出して行う。測定例としては、回転機器に振動センサと回転基準センサとを取り付け、振動センサで検出された振動信号から振動変位を求め、回転基準検出センサで検出された回転基準信号から振動変位の位相を算出する。
【0004】
振動センサには振動変位を直接検出する変位センサ、振動速度を検出する速度センサ、振動加速度を検出する加速度センサが使用される。速度センサを使用した場合は検出した振動速度信号を1回積分することにより振動変位を得ており、加速度センサを使用した場合は検出した振動加速度信号を2回積分することにより振動変位を得ている。
【0005】
変位センサは渦電流型センサが使用されることが多く、一般的に負電源を使用し、出力される信号も負極性の信号(直流の負電圧に変位振動信号が重畳された状態)が多い。また、加速度センサはアンプ内蔵型の加速度センサが使用されることが多く、このセンサに内蔵されているアンプに電源となる定電流を供給するため、加速度センサの信号出力は常時正極性の信号(直流の正電圧に変位振動信号が重畳された状態)となる。
【0006】
回転基準センサは光電型センサや渦電流型センサが使用される。光電型センサでは回転部の回転基準位置に反射材を取り付けておき、反射材が回転する位置に光電センサを設置して回転基準信号を検出する。渦電流型センサでは変位センサと同じセンサが使用され、回転部の回転基準位置に段差を設け、この位置にセンサを設置して回転基準信号を検出する。
【0007】
そして、振動センサから入力された信号をもとに回転変位振動を算出し、回転基準センサから入力された信号の周期とタイミングを基準として振動位相を算出する。通常は測定対象となる回転機器の定格回転数で測定するが、大型回転機器などでは起動から定格回転数に達する間に機械的な共振を起こす回転数が存在することがあるため、起動から定格回転数に達する間に一定の回転数間隔で測定を行うことがある。例えば定格回転数3600min−1で起動から300min−1毎に測定する場合、600min−1、900min−1、・・・3000min−1、3300min−1、3600min−1というような間隔で測定を行う。そして、得られた振動位相を基にカウンタウェイト等を回転体に取り付け、回転機器のアンバランスを補正している。
【特許文献1】特開2003−149090号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、従来のものにおいては、下記のような課題があった。まず、回転振動位相補正、変位センサ信号バイアス補正、回転振動位相補正についての課題を述べる。回転振動のアンバランスを検出するのに必要な情報としては回転振動の位相が重要であり、特に大型回転機器の起動から定格回転数までに達するまでの低い回転数領域での振動位相を精度良く測定することが求められているが、振動センサに加速度センサや渦電流式変位センサを使用した場合、入力される信号には直流成分が重畳されるため、この成分を取り除く必要があり、直流分をカットするためにハイパスフィルタを使用している。
【0009】
しかし、ハイパスフィルタを用いると、図17に示すように低い回転数領域ではハイパスフィルタを通った後の信号位相がずれてしまうことから、ハイパスフィルタのカットオフ周波数を低めに設定するのが望ましい。一方で回転成分以外の低い振動成分を除去するにはハイパスフィルタのカットオフ周波数を高めに設定するのが望ましく、両者のトレードオフを考慮してハイパスフィルタのカットオフ周波数を決定しているが、いずれにしても低い回転数領域での振動位相の検出値は真値に対して誤差が発生することが免れないという問題点があった。
【0010】
次に、回転基準信号自動検出についての課題を述べる。回転振動位相検出装置には、測定対象に対して常設する固定式と、振動センサや回転基準センサを都度対象機器に設置する可搬式とがある。固定式の回転振動位相検出装置においては、振動センサ及び回転基準センサは多くの場合渦電流式センサが設置されており信号インターフェースもこれに合わせた仕様になっている。可搬式の回転振動位相検出装置においては、多くの場合振動センサは速度センサ及び加速度センサが用いられ、回転基準センサは光電式センサを用いており信号インターフェースもこれに合わせた仕様になっている。
【0011】
しかしながら、実際のフィールドでの測定においては、固定式のセンサが設置された回転機器の振動位相を可搬式の装置で測定したい場合には検出位相の基準を合わせるために、固定式回転基準センサから出力される信号を入力するのが望ましいが信号レベルが異なるためにその信号を活用できないという問題点があった。
【0012】
次に、回転昇速や降速時の測定タイミング予測についての課題を述べる。起動から定格回転数に達する間に一定の回転数間隔で測定する場合においては、一定の測定周期を決めて定期的に測定を行い、所望の測定回転数に近づいた際の測定値を採用している。例えば所望測定回転数が600min−1、許容範囲±100min−1とした場合測定回転数が500min−1〜700min−1の範囲に達した時、その測定値を600min−1時の測定値として採用している。
【0013】
しかし、従来の測定方法においては測定周期が一定なため、所望の回転数にできるだけ近い回転数で測定するためには測定周期を短くするか、許容範囲を狭くしなければならないが、処理時間を考えると測定周期を短くするには限界があり、許容範囲を狭くし過ぎると、回転体の昇速率(回転数が上昇する比率)が大きい場合、測定周期の期間内に許容範囲を超えて回転数が上昇してしまい、測定時期を逃す恐れがある。
【0014】
本発明の目的は、回転振動を検出するセンサから振動信号が出力されるまでの信号位相のずれを補正でき回転基準位置の検出ができるとともに、直流信号レベルを相殺でき所望回転数における振動信号を取得することができる回転振動位相検出装置及び方法を提供することである。
【課題を解決するための手段】
【0015】
本発明は、回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出装置において、回転機器の回転部の振動変位を検出する振動センサと、回転機器の回転部の回転基準信号を検出する回転基準センサと、前記振動センサで検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置とを備えたことを特徴とする。
【発明の効果】
【0016】
本発明によれば、回転振動を検出するセンサから振動信号が出力されるまでの信号位相のずれを補正でき、回転基準位置の検出ができるとともに、直流信号レベルを相殺でき、所望回転数における振動信号を取得することができる回転振動位相検出装置を提供できる。
【発明を実施するための最良の形態】
【0017】
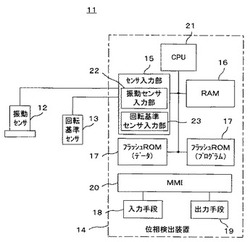
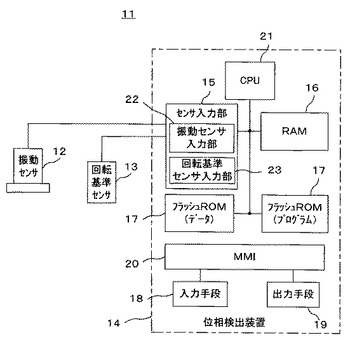
図1は本発明の実施の形態に係わる回転振動位相検出装置に構成図である。図1に示すように、回転振動位相検出装置11は、回転機器の回転部の振動変位を検出する振動センサ12と、回転機器の回転部の回転基準信号を検出する回転基準センサ13と、振動センサ12で検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置14とから構成される。
【0018】
位相検出装置14は、センサ入力部15と、RAM16と、データ及びプログラムを格納するフラッシュROM17と、タッチパネル、キーボード、マウスなどの入力手段18と、LCD表示などの出力手段19と、入力手段18及び出力手段19を制御するマンマシンインターフェース(MMI)20と、位相検出のための処理演算を行うCPU21とで構成される。センサ入力部15は振動センサ入力部22及び回転基準センサ入力部23を有している。
【0019】
振動センサ12の検出信号は、センサ入力部15の振動センサ入力部22に入力され、回転基準センサ13の検出信号はセンサ入力部15の回転基準センサ入力部23に入力される。
【0020】
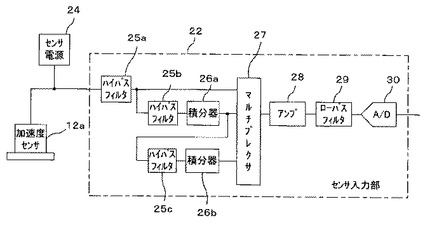
図2は、振動センサ12が加速度センサ12aの場合のセンサ入力部15の振動センサ入力部22の一例の構成図である。加速度センサ12aにはセンサ電源24が接続され、加速度センサ12aからの検出信号はセンサ入力部15の振動センサ入力部22に入力される。振動センサ入力部22は、ハイパスフィルタ25a、25b、25c、積分器26a、26b、マルチプレクサ27、アンプ28、ローパスフィルタ29、アナログ/デジタル変換器30から構成される。
【0021】
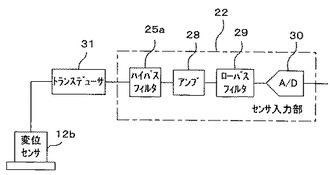
図3は、振動センサ12が変位センサ12bの場合のセンサ入力部15の振動センサ入力部22の一例の構成図である。変位センサ12bはトランスデューサ31を介してセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ハイパスフィルタ25a、アンプ28、ローパスフィルタ29、アナログ/デジタル変換器30から構成される。
【0022】
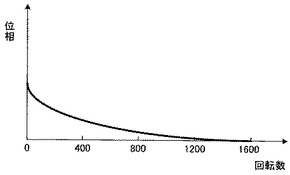
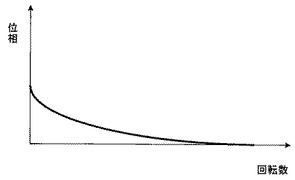
図2の加速度センサ12a及び図3の変位センサ12bのセンサ出力信号はハイパスフィルタ25aに入力され、センサ出力信号の直流分がカットされるが、このときのハイパスフィルタ25aの位相特性は、例えば図4に示すような特性となり、回転数が低くなると位相のずれが大きくなる。この場合の回転数と位相の関係を表1に示す。
【表1】

【0023】
そこで、本発明の実施の形態では、データ格納用フラシュROM17に、表1に示した回転数と位相の関係のデータを回転数・位相データテーブルとして予め格納しておく。
【0024】
そして、振動波形及び回転基準信号をサンプリングし、CPU21は回転基準信号の周期から回転数を算出し、振動センサの信号から回転周期成分を抽出し、回転基準信号との位相を算出する。その後、データ格納用フラシュROM17に格納された回転数・位相データテーブルから、算出された回転数に該当する位相特性を引き出し、回転基準信号と振動センサ信号から算出した位相量から位相特性量を差し引くことにより、ハイパスフィルタ25aによる位相のずれを相殺する。
【0025】
これにより、加速度センサ12aや渦電流式変位センサ12bなどの直流成分が重畳された信号が入力される場合においてハイパスフィルタ25aが構成されていても位相のずれを補正できるので、振動位相の真値により近い値を得ることができ振動位相の測定精度が向上する。
【0026】
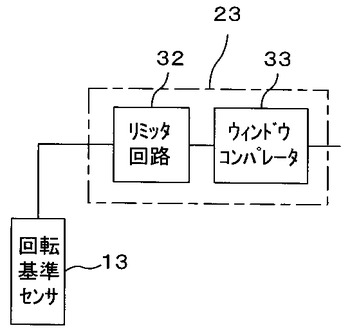
図5は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の一例を示す構成図である。回転基準センサ入力部23はリミッタ回路32及びウィンドウコンパレータ33から構成される。図5においてリミッタ回路32では、入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。ウィンドウコンパレータ33は「上限閾値」と「下限閾値」とが設定され、入力された信号と上下限閾値とを比較し、表2に示す条件で出力する。
【表2】
【0027】
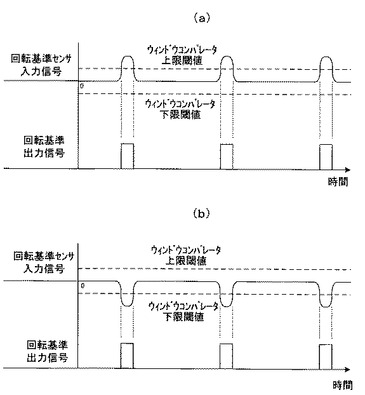
例えば、光電型センサを用いた回転基準センサ13の場合、図6(a)に示すような回転基準センサ入力信号が入力される。回転基準センサ入力信号がHighレベルのとき、ウィンドウコンパレータ33の上限閾値を超えるのでウィンドウコンパレータ33の出力がHighレベルとなる。
【0028】
また、渦電流式変位センサを用いた回転基準センサの場合、図6(b)に示すような、回転基準センサ入力信号が入力される。回転基準センサ入力信号がLowレベルのとき、ウィンドウコンパレータ33の下限閾値を超えるのでウィンドウコンパレータ33の出力がHighレベルとなる。
【0029】
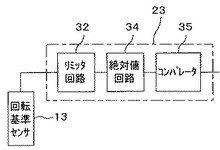
次に、図7は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の他の一例を示す構成図である。回転基準センサ入力部23は、リミッタ回路32、絶対値回路34及びコンパレータ35から構成される。
【0030】
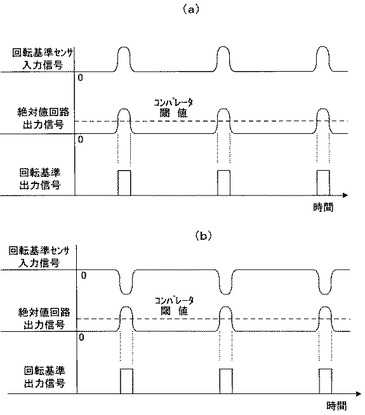
図7において、リミッタ回路32では入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。絶対値回路34では入力された信号の極性(+、−)にかかわらず、信号の絶対値を出力する。コンパレータ35では予め設定された「閾値」とコンパレータに入力された信号とを比較し、表3に示す条件で出力する。
【表3】
【0031】
例えば、光電型センサを用いた回転基準センサ13の場合、図8(a)に示すような回転基準センサ入力信号が入力される。そして絶対値回路34を経た後の信号は入力信号と同じ波形となり、コンパレータで閾値と比較される。回転基準センサ入力信号がHighレベルのとき、コンパレータ35の閾値を超えるのでコンパレータ35の出力がHighレベルとなる。
【0032】
また、渦電流式変位センサを用いた回転基準センサ13の場合、図8(b)に示すような回転基準センサ入力信号が入力される。そして絶対値回路34を経た後の信号は入力信号と極性が反転した波形となり、コンパレータ35で閾値と比較される。回転基準センサ入力信号がLowレベルのとき、コンパレータ35の閾値を超えるのでコンパレータ35の出力がHighレベルとなる。
【0033】
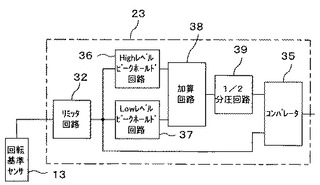
次に、図9は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の別の他の一例を示す構成図である。回転基準センサ入力部23は、リミッタ回路32、Highレベルピークホールド回路36、Lowレベルピークホールド回路37、加算回路38、1/2分圧回路39及びコンパレータ35から構成される。
【0034】
図9において、リミッタ回路32では、入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。Highレベルピークホールド回路36では入力される信号の中で最も高いレベルを保持し、Lowレベルピークホールド回路37では入力される信号の中で最も低いレベルを保持する。加算回路38ではピークホールドされたレベルを加算し、1/2分圧回路39では加算されたレベルを1/2のレベルにする。これにより1/2分圧回路39の出力はHigh側ピークレベルとLow側ピークレベルの中間レベルが得られ、これがコンパレータ35の閾値として入力される。コンパレータ35では、センサ信号と生成された閾値とを比較し、表4に示す条件で出力する。
【表4】
【0035】
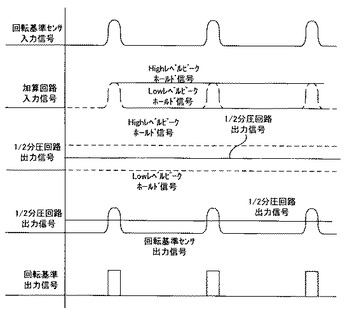
図10において、回転基準センサ入力信号が入力されるとHighレベルピークホールド回路36で入力される信号の中で最も高いレベルが保持され、Lowレベルピークホールド回路37で入力される信号の中で最も低いレベルが保持される。これら2つの信号を加算回路38で加算し、1/2分圧回路39を経て、High側ピークレベルとLow側レベルとの中間レベルの信号を得る。これがコンパレータ35の閾値となる。コンパレータ35では、センサ信号とこれにより生成された閾値とを比較する。
【0036】
これにより、信号レベルの異なる回転振動位相検出装置は測定対象に対して常設する固定式と、振動センサや回転基準センサを都度対象機器に設置する可搬式との区別なく、回転基準センサ13として適用できることから、位相検出装置14の可用性が大きく向上する。
【0037】
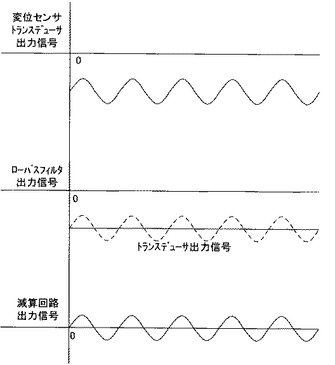
図11は、振動センサ12が変位センサ12bの場合のセンサ入力部15の振動センサ入力部22の他の一例の構成図である。変位センサ12bはトランスデューサ31を介してセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ローパスフィルタ29a、アンプ28、減算回路40、ローパスフィルタ29b、アナログ/デジタル変換器30から構成される。
【0038】
センサ入力部15における振動センサ入力部22のローパスフィルタ29aは、入力された振動信号の振動成分を除去し、重畳されている直流分のみを出力する。減算回路40では振動センサ信号からローパスフィルタ29aにより生成された信号を差し引く。これにより、振動センサの振動成分が得られる。減算回路40により得られた信号は、アンプ28、エイリアジングを除去するローパスフィルタ29bを経てアナログ/デジタル変換器30に入力される。
【0039】
振動センサとして渦電流式変位センサを用いた場合、図12に示すように、−の直流電圧に振動信号成分が重畳された波形となっており、ローパスフィルタ29aにより、重畳されている直流分のみが出力される。そして、減算回路40にて振動センサ信号からローパスフィルタ29aにより生成された信号を差し引かれ、振動センサの振動成分が得られる。
【0040】
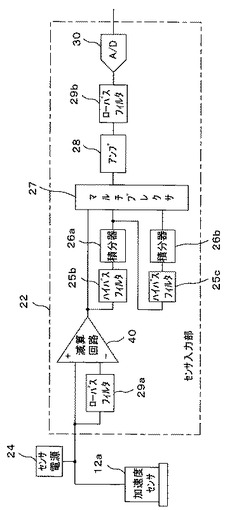
図13は、振動センサ12が加速度センサ12aの場合のセンサ入力部15の振動センサ入力部22の他の一例の構成図である。加速度センサ12aはセンサ電源24に接続されセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ローパスフィルタ29a、減算回路40、ハイパスフィルタ25b、25c、積分器26a、26b、マルチプレクサ27、アンプ28、ローパスフィルタ29b、アナログ/デジタル変換器30から構成される。
【0041】
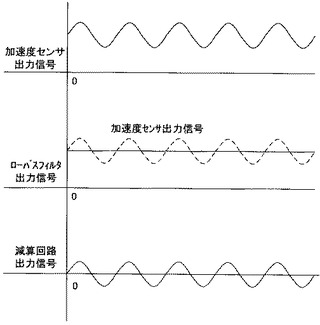
ここで、加速度センサ12aを用いた場合、センサ電源24では加速度センサ12aに電源を供給するために定電流を供給している。そのため、加速度センサ12aの信号出力は、図14に示すように、+の直流電圧に振動信号成分が重畳された波形となっている。従って、ローパスフィルタ29aにより、入力された波形は、図14に示すように、重畳されている直流分のみが出力される。そして、減算回路40にて振動センサ信号からローパスフィルタ29aにより生成された信号が差し引かれ、振動センサの振動成分が得られる。
【0042】
これにより、加速度センサ12aや渦電流式変位センサ12bなどの直流成分が重畳された信号が入力される場合においても、ハイパスフィルタを用いることなく、直流分を除去できることから、低い回転数領域においても振動位相のずれが生じず、振動位相の真値により近い値を得ることができ測定精度が向上する。
【0043】
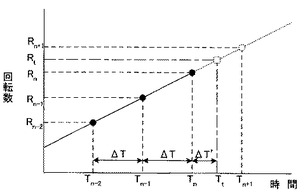
次に、回転昇速降速時の測定タイミング予測について説明する。図15は、本発明の実施の形態における回転機器が起動して定格回転数まで昇速する際の時間・回転数推移の一例の特性図である。
【0044】
図15のように、時間の経過と共に回転数が上昇する状況を想定する。図15では一定時間間隔ΔTで振動信号及び回転基準信号のサンプリングが行われ、回転基準信号の間隔より回転数が算出されている。n回目のサンプリング時刻Tnにおける回転数をRnとし、目標回転数をRt、目標回転数Rtに到達する時刻をTtとする。サンプリング間隔をΔTとするとサンプリング時刻は下記関係式となる。
【0045】
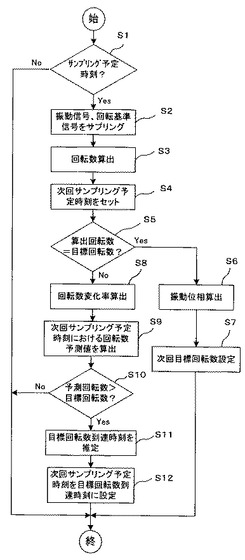
Tn−Tn−1=ΔT
図16は振動信号の取り込み動作の手順を示すフローチャートである。時刻Tn−1におけるサンプリングが終了し、次回サンプリング時刻Tnが設定されると、当該時刻になるまでサンプリング待ちの状態となる。この状態ではサンプリング予定時刻になったか否かが判定される(S1)。
【0046】
サンプリング予定時刻の時刻Tnに達したときは、振動信号、回転基準信号をサンプリングし(S2)、回転基準信号から回転数を算出する(S3)。
【0047】
そして、次回サンプリング予定時刻Tn+1を設定し(S4)、予め設定された目標回転数Rtと算出された回転数Rnを比較する(S5)。一致もしくは予め設定された許容差以内であった場合には回転基準信号と振動信号から振動位相を算出し(S6)、次の目標回転数を設定し(S7)、次回サンプリング予定時刻Tn+1に到達するのを待つ。
【0048】
一方、ステップS5の判定で、目標回転数Rtと算出された回転数Rnとが不一致もしくは予め設定された許容差を越えた場合には、今回サンプリングされた時刻Tnに算出された回転数Rtと過去にサンプリングされた時刻Tn−kにおける回転数Rt−kから回転数変化率ΔR/ΔTを下記式により算出する(S8)。
【0049】
ΔR/ΔT=(Rn−Rn−k)/(Tn−Tn−k)
ただし、kは1以上の整数値
そして、回転数変化率ΔR/ΔTと今回のサンプリング時刻から次回サンプリング予定時刻Tn+1における回転数を下記式により予測する(S9)。
【0050】
Rn+1=Rn+(ΔR/ΔT)
こうして得られた予測値Rn+1と目標回転数Rtとを比較し(S10)、予測値Rn+1が目標回転数Rtを越える場合は、目標回転数Rtに到達するまでの時間間隔ΔT’を下記式により推定する。
【0051】
ΔT’=(Rt−Rn)/(ΔR/ΔT)
そして、下記式により目標回転数到達時刻Ttを推定する(S11)。
【0052】
Tt=Tn+ΔT’
そして、推定された時刻を次回サンプリング予定時刻に設定し(S12)、次回サンプリング予定時刻に到達するのを待つ。予測値Rn+1が目標回転数Rtを越えない場合は、そのまま次回サンプリング予定時刻Tn+1に到達するのを待つ。
【0053】
これにより、起動から定格回転数に達する間に一定の回転数間隔で測定する場合において、測定周期の短縮が困難であっても、測定時期を逃すことなく所望の回転数測定することができるという優れた効果を奏する。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態に係わる回転振動位相検出装置に構成図。
【図2】本発明の実施の形態における振動センサが加速度センサの場合のセンサ入力部の振動センサ入力部の一例の構成図。
【図3】本発明の実施の形態における振動センサが変位センサの場合のセンサ入力部の振動センサ入力部の一例の構成図。
【図4】本発明の実施の形態における振動センサ入力部のハイパスフィルタによる回転数−位相特性の特性図。
【図5】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の一例を示す構成図。
【図6】図5に示した回転基準センサ入力部の動作波形図。
【図7】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の他の一例を示す構成図。
【図8】図7に示した回転基準センサ入力部の動作波形図。
【図9】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の別の他の一例を示す構成図。
【図10】図9に示した回転基準センサ入力部の動作波形図。
【図11】本発明の実施の形態におけるセンサ入力部の振動センサ入力部の他の一例の構成図。
【図12】図11に示した振動センサ入力部の動作波形図。
【図13】本発明の実施の形態におけるセンサ入力部の振動センサ入力部の別の他の一例の構成図。
【図14】図11に示した振動センサ入力部の動作波形図。
【図15】本発明の実施の形態における回転機器が起動して定格回転数まで昇速する際の時間・回転数推移の一例の特性図。
【図16】本発明の実施の形態での振動信号の取り込み動作の手順を示すフローチャート
【図17】従来のハイパスフィルタによる回転数−位相特性の特性図。
【符号の説明】
【0055】
11…回転振動位相検出装置、12…振動センサ、12a…加速度センサ、12b…変位センサ、13…回転基準センサ、14…位相検出装置、15…センサ入力部、16…RAM、17…フラッシュROM、18…入力手段、19…LCD表示などの出力手段、20…マンマシンインターフェース、21…CPU、22…振動センサ入力部、23…、24…、25…ハイパスフィルタ、26…積分器、27…マルチプレクサ、28…アンプ、29…ローパスフィルタ、30…アナログ/デジタル変換器、31…トランスデューサ、32…リミッタ回路、33…ウィンドウコンパレータ、34…絶対値回路、35…コンパレータ、36…Highレベルピークホールド回路、37…Lowレベルピークホールド回路、38…加算回路、39…1/2分圧回路、40…減算回路
【技術分野】
【0001】
本発明は、回転機器の回転部に発生する振動を検出し、回転のアンバランス成分を評価するための回転振動位相検出装置及び方法に関するものである。
【背景技術】
【0002】
タービン、発電機、電動機などの回転機器においては、回転部分のアンバランス等により回転軸が大きく振動することがあるため、回転機器の回転振動を検出し、振動による異常を診断している。回転機の軸受診断装置として、複数のファイルの中から振動信号とこれに対応した診断情報を正確に読み出して軸受診断を行うことができるようにしたものがある(例えば、特許文献1参照)。
【0003】
回転機器の回転部のアンバランスを検出するには回転機器の振動変位を検出して行う。測定例としては、回転機器に振動センサと回転基準センサとを取り付け、振動センサで検出された振動信号から振動変位を求め、回転基準検出センサで検出された回転基準信号から振動変位の位相を算出する。
【0004】
振動センサには振動変位を直接検出する変位センサ、振動速度を検出する速度センサ、振動加速度を検出する加速度センサが使用される。速度センサを使用した場合は検出した振動速度信号を1回積分することにより振動変位を得ており、加速度センサを使用した場合は検出した振動加速度信号を2回積分することにより振動変位を得ている。
【0005】
変位センサは渦電流型センサが使用されることが多く、一般的に負電源を使用し、出力される信号も負極性の信号(直流の負電圧に変位振動信号が重畳された状態)が多い。また、加速度センサはアンプ内蔵型の加速度センサが使用されることが多く、このセンサに内蔵されているアンプに電源となる定電流を供給するため、加速度センサの信号出力は常時正極性の信号(直流の正電圧に変位振動信号が重畳された状態)となる。
【0006】
回転基準センサは光電型センサや渦電流型センサが使用される。光電型センサでは回転部の回転基準位置に反射材を取り付けておき、反射材が回転する位置に光電センサを設置して回転基準信号を検出する。渦電流型センサでは変位センサと同じセンサが使用され、回転部の回転基準位置に段差を設け、この位置にセンサを設置して回転基準信号を検出する。
【0007】
そして、振動センサから入力された信号をもとに回転変位振動を算出し、回転基準センサから入力された信号の周期とタイミングを基準として振動位相を算出する。通常は測定対象となる回転機器の定格回転数で測定するが、大型回転機器などでは起動から定格回転数に達する間に機械的な共振を起こす回転数が存在することがあるため、起動から定格回転数に達する間に一定の回転数間隔で測定を行うことがある。例えば定格回転数3600min−1で起動から300min−1毎に測定する場合、600min−1、900min−1、・・・3000min−1、3300min−1、3600min−1というような間隔で測定を行う。そして、得られた振動位相を基にカウンタウェイト等を回転体に取り付け、回転機器のアンバランスを補正している。
【特許文献1】特開2003−149090号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、従来のものにおいては、下記のような課題があった。まず、回転振動位相補正、変位センサ信号バイアス補正、回転振動位相補正についての課題を述べる。回転振動のアンバランスを検出するのに必要な情報としては回転振動の位相が重要であり、特に大型回転機器の起動から定格回転数までに達するまでの低い回転数領域での振動位相を精度良く測定することが求められているが、振動センサに加速度センサや渦電流式変位センサを使用した場合、入力される信号には直流成分が重畳されるため、この成分を取り除く必要があり、直流分をカットするためにハイパスフィルタを使用している。
【0009】
しかし、ハイパスフィルタを用いると、図17に示すように低い回転数領域ではハイパスフィルタを通った後の信号位相がずれてしまうことから、ハイパスフィルタのカットオフ周波数を低めに設定するのが望ましい。一方で回転成分以外の低い振動成分を除去するにはハイパスフィルタのカットオフ周波数を高めに設定するのが望ましく、両者のトレードオフを考慮してハイパスフィルタのカットオフ周波数を決定しているが、いずれにしても低い回転数領域での振動位相の検出値は真値に対して誤差が発生することが免れないという問題点があった。
【0010】
次に、回転基準信号自動検出についての課題を述べる。回転振動位相検出装置には、測定対象に対して常設する固定式と、振動センサや回転基準センサを都度対象機器に設置する可搬式とがある。固定式の回転振動位相検出装置においては、振動センサ及び回転基準センサは多くの場合渦電流式センサが設置されており信号インターフェースもこれに合わせた仕様になっている。可搬式の回転振動位相検出装置においては、多くの場合振動センサは速度センサ及び加速度センサが用いられ、回転基準センサは光電式センサを用いており信号インターフェースもこれに合わせた仕様になっている。
【0011】
しかしながら、実際のフィールドでの測定においては、固定式のセンサが設置された回転機器の振動位相を可搬式の装置で測定したい場合には検出位相の基準を合わせるために、固定式回転基準センサから出力される信号を入力するのが望ましいが信号レベルが異なるためにその信号を活用できないという問題点があった。
【0012】
次に、回転昇速や降速時の測定タイミング予測についての課題を述べる。起動から定格回転数に達する間に一定の回転数間隔で測定する場合においては、一定の測定周期を決めて定期的に測定を行い、所望の測定回転数に近づいた際の測定値を採用している。例えば所望測定回転数が600min−1、許容範囲±100min−1とした場合測定回転数が500min−1〜700min−1の範囲に達した時、その測定値を600min−1時の測定値として採用している。
【0013】
しかし、従来の測定方法においては測定周期が一定なため、所望の回転数にできるだけ近い回転数で測定するためには測定周期を短くするか、許容範囲を狭くしなければならないが、処理時間を考えると測定周期を短くするには限界があり、許容範囲を狭くし過ぎると、回転体の昇速率(回転数が上昇する比率)が大きい場合、測定周期の期間内に許容範囲を超えて回転数が上昇してしまい、測定時期を逃す恐れがある。
【0014】
本発明の目的は、回転振動を検出するセンサから振動信号が出力されるまでの信号位相のずれを補正でき回転基準位置の検出ができるとともに、直流信号レベルを相殺でき所望回転数における振動信号を取得することができる回転振動位相検出装置及び方法を提供することである。
【課題を解決するための手段】
【0015】
本発明は、回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出装置において、回転機器の回転部の振動変位を検出する振動センサと、回転機器の回転部の回転基準信号を検出する回転基準センサと、前記振動センサで検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置とを備えたことを特徴とする。
【発明の効果】
【0016】
本発明によれば、回転振動を検出するセンサから振動信号が出力されるまでの信号位相のずれを補正でき、回転基準位置の検出ができるとともに、直流信号レベルを相殺でき、所望回転数における振動信号を取得することができる回転振動位相検出装置を提供できる。
【発明を実施するための最良の形態】
【0017】
図1は本発明の実施の形態に係わる回転振動位相検出装置に構成図である。図1に示すように、回転振動位相検出装置11は、回転機器の回転部の振動変位を検出する振動センサ12と、回転機器の回転部の回転基準信号を検出する回転基準センサ13と、振動センサ12で検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置14とから構成される。
【0018】
位相検出装置14は、センサ入力部15と、RAM16と、データ及びプログラムを格納するフラッシュROM17と、タッチパネル、キーボード、マウスなどの入力手段18と、LCD表示などの出力手段19と、入力手段18及び出力手段19を制御するマンマシンインターフェース(MMI)20と、位相検出のための処理演算を行うCPU21とで構成される。センサ入力部15は振動センサ入力部22及び回転基準センサ入力部23を有している。
【0019】
振動センサ12の検出信号は、センサ入力部15の振動センサ入力部22に入力され、回転基準センサ13の検出信号はセンサ入力部15の回転基準センサ入力部23に入力される。
【0020】
図2は、振動センサ12が加速度センサ12aの場合のセンサ入力部15の振動センサ入力部22の一例の構成図である。加速度センサ12aにはセンサ電源24が接続され、加速度センサ12aからの検出信号はセンサ入力部15の振動センサ入力部22に入力される。振動センサ入力部22は、ハイパスフィルタ25a、25b、25c、積分器26a、26b、マルチプレクサ27、アンプ28、ローパスフィルタ29、アナログ/デジタル変換器30から構成される。
【0021】
図3は、振動センサ12が変位センサ12bの場合のセンサ入力部15の振動センサ入力部22の一例の構成図である。変位センサ12bはトランスデューサ31を介してセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ハイパスフィルタ25a、アンプ28、ローパスフィルタ29、アナログ/デジタル変換器30から構成される。
【0022】
図2の加速度センサ12a及び図3の変位センサ12bのセンサ出力信号はハイパスフィルタ25aに入力され、センサ出力信号の直流分がカットされるが、このときのハイパスフィルタ25aの位相特性は、例えば図4に示すような特性となり、回転数が低くなると位相のずれが大きくなる。この場合の回転数と位相の関係を表1に示す。
【表1】
【0023】
そこで、本発明の実施の形態では、データ格納用フラシュROM17に、表1に示した回転数と位相の関係のデータを回転数・位相データテーブルとして予め格納しておく。
【0024】
そして、振動波形及び回転基準信号をサンプリングし、CPU21は回転基準信号の周期から回転数を算出し、振動センサの信号から回転周期成分を抽出し、回転基準信号との位相を算出する。その後、データ格納用フラシュROM17に格納された回転数・位相データテーブルから、算出された回転数に該当する位相特性を引き出し、回転基準信号と振動センサ信号から算出した位相量から位相特性量を差し引くことにより、ハイパスフィルタ25aによる位相のずれを相殺する。
【0025】
これにより、加速度センサ12aや渦電流式変位センサ12bなどの直流成分が重畳された信号が入力される場合においてハイパスフィルタ25aが構成されていても位相のずれを補正できるので、振動位相の真値により近い値を得ることができ振動位相の測定精度が向上する。
【0026】
図5は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の一例を示す構成図である。回転基準センサ入力部23はリミッタ回路32及びウィンドウコンパレータ33から構成される。図5においてリミッタ回路32では、入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。ウィンドウコンパレータ33は「上限閾値」と「下限閾値」とが設定され、入力された信号と上下限閾値とを比較し、表2に示す条件で出力する。
【表2】
【0027】
例えば、光電型センサを用いた回転基準センサ13の場合、図6(a)に示すような回転基準センサ入力信号が入力される。回転基準センサ入力信号がHighレベルのとき、ウィンドウコンパレータ33の上限閾値を超えるのでウィンドウコンパレータ33の出力がHighレベルとなる。
【0028】
また、渦電流式変位センサを用いた回転基準センサの場合、図6(b)に示すような、回転基準センサ入力信号が入力される。回転基準センサ入力信号がLowレベルのとき、ウィンドウコンパレータ33の下限閾値を超えるのでウィンドウコンパレータ33の出力がHighレベルとなる。
【0029】
次に、図7は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の他の一例を示す構成図である。回転基準センサ入力部23は、リミッタ回路32、絶対値回路34及びコンパレータ35から構成される。
【0030】
図7において、リミッタ回路32では入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。絶対値回路34では入力された信号の極性(+、−)にかかわらず、信号の絶対値を出力する。コンパレータ35では予め設定された「閾値」とコンパレータに入力された信号とを比較し、表3に示す条件で出力する。
【表3】
【0031】
例えば、光電型センサを用いた回転基準センサ13の場合、図8(a)に示すような回転基準センサ入力信号が入力される。そして絶対値回路34を経た後の信号は入力信号と同じ波形となり、コンパレータで閾値と比較される。回転基準センサ入力信号がHighレベルのとき、コンパレータ35の閾値を超えるのでコンパレータ35の出力がHighレベルとなる。
【0032】
また、渦電流式変位センサを用いた回転基準センサ13の場合、図8(b)に示すような回転基準センサ入力信号が入力される。そして絶対値回路34を経た後の信号は入力信号と極性が反転した波形となり、コンパレータ35で閾値と比較される。回転基準センサ入力信号がLowレベルのとき、コンパレータ35の閾値を超えるのでコンパレータ35の出力がHighレベルとなる。
【0033】
次に、図9は本発明の実施の形態におけるセンサ入力部15の回転基準センサ入力部23の別の他の一例を示す構成図である。回転基準センサ入力部23は、リミッタ回路32、Highレベルピークホールド回路36、Lowレベルピークホールド回路37、加算回路38、1/2分圧回路39及びコンパレータ35から構成される。
【0034】
図9において、リミッタ回路32では、入力されるセンサ信号の振幅を回路保護のためにある一定幅に制限する。Highレベルピークホールド回路36では入力される信号の中で最も高いレベルを保持し、Lowレベルピークホールド回路37では入力される信号の中で最も低いレベルを保持する。加算回路38ではピークホールドされたレベルを加算し、1/2分圧回路39では加算されたレベルを1/2のレベルにする。これにより1/2分圧回路39の出力はHigh側ピークレベルとLow側ピークレベルの中間レベルが得られ、これがコンパレータ35の閾値として入力される。コンパレータ35では、センサ信号と生成された閾値とを比較し、表4に示す条件で出力する。
【表4】
【0035】
図10において、回転基準センサ入力信号が入力されるとHighレベルピークホールド回路36で入力される信号の中で最も高いレベルが保持され、Lowレベルピークホールド回路37で入力される信号の中で最も低いレベルが保持される。これら2つの信号を加算回路38で加算し、1/2分圧回路39を経て、High側ピークレベルとLow側レベルとの中間レベルの信号を得る。これがコンパレータ35の閾値となる。コンパレータ35では、センサ信号とこれにより生成された閾値とを比較する。
【0036】
これにより、信号レベルの異なる回転振動位相検出装置は測定対象に対して常設する固定式と、振動センサや回転基準センサを都度対象機器に設置する可搬式との区別なく、回転基準センサ13として適用できることから、位相検出装置14の可用性が大きく向上する。
【0037】
図11は、振動センサ12が変位センサ12bの場合のセンサ入力部15の振動センサ入力部22の他の一例の構成図である。変位センサ12bはトランスデューサ31を介してセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ローパスフィルタ29a、アンプ28、減算回路40、ローパスフィルタ29b、アナログ/デジタル変換器30から構成される。
【0038】
センサ入力部15における振動センサ入力部22のローパスフィルタ29aは、入力された振動信号の振動成分を除去し、重畳されている直流分のみを出力する。減算回路40では振動センサ信号からローパスフィルタ29aにより生成された信号を差し引く。これにより、振動センサの振動成分が得られる。減算回路40により得られた信号は、アンプ28、エイリアジングを除去するローパスフィルタ29bを経てアナログ/デジタル変換器30に入力される。
【0039】
振動センサとして渦電流式変位センサを用いた場合、図12に示すように、−の直流電圧に振動信号成分が重畳された波形となっており、ローパスフィルタ29aにより、重畳されている直流分のみが出力される。そして、減算回路40にて振動センサ信号からローパスフィルタ29aにより生成された信号を差し引かれ、振動センサの振動成分が得られる。
【0040】
図13は、振動センサ12が加速度センサ12aの場合のセンサ入力部15の振動センサ入力部22の他の一例の構成図である。加速度センサ12aはセンサ電源24に接続されセンサ入力部15の振動センサ入力部22に接続される。振動センサ入力部22は、ローパスフィルタ29a、減算回路40、ハイパスフィルタ25b、25c、積分器26a、26b、マルチプレクサ27、アンプ28、ローパスフィルタ29b、アナログ/デジタル変換器30から構成される。
【0041】
ここで、加速度センサ12aを用いた場合、センサ電源24では加速度センサ12aに電源を供給するために定電流を供給している。そのため、加速度センサ12aの信号出力は、図14に示すように、+の直流電圧に振動信号成分が重畳された波形となっている。従って、ローパスフィルタ29aにより、入力された波形は、図14に示すように、重畳されている直流分のみが出力される。そして、減算回路40にて振動センサ信号からローパスフィルタ29aにより生成された信号が差し引かれ、振動センサの振動成分が得られる。
【0042】
これにより、加速度センサ12aや渦電流式変位センサ12bなどの直流成分が重畳された信号が入力される場合においても、ハイパスフィルタを用いることなく、直流分を除去できることから、低い回転数領域においても振動位相のずれが生じず、振動位相の真値により近い値を得ることができ測定精度が向上する。
【0043】
次に、回転昇速降速時の測定タイミング予測について説明する。図15は、本発明の実施の形態における回転機器が起動して定格回転数まで昇速する際の時間・回転数推移の一例の特性図である。
【0044】
図15のように、時間の経過と共に回転数が上昇する状況を想定する。図15では一定時間間隔ΔTで振動信号及び回転基準信号のサンプリングが行われ、回転基準信号の間隔より回転数が算出されている。n回目のサンプリング時刻Tnにおける回転数をRnとし、目標回転数をRt、目標回転数Rtに到達する時刻をTtとする。サンプリング間隔をΔTとするとサンプリング時刻は下記関係式となる。
【0045】
Tn−Tn−1=ΔT
図16は振動信号の取り込み動作の手順を示すフローチャートである。時刻Tn−1におけるサンプリングが終了し、次回サンプリング時刻Tnが設定されると、当該時刻になるまでサンプリング待ちの状態となる。この状態ではサンプリング予定時刻になったか否かが判定される(S1)。
【0046】
サンプリング予定時刻の時刻Tnに達したときは、振動信号、回転基準信号をサンプリングし(S2)、回転基準信号から回転数を算出する(S3)。
【0047】
そして、次回サンプリング予定時刻Tn+1を設定し(S4)、予め設定された目標回転数Rtと算出された回転数Rnを比較する(S5)。一致もしくは予め設定された許容差以内であった場合には回転基準信号と振動信号から振動位相を算出し(S6)、次の目標回転数を設定し(S7)、次回サンプリング予定時刻Tn+1に到達するのを待つ。
【0048】
一方、ステップS5の判定で、目標回転数Rtと算出された回転数Rnとが不一致もしくは予め設定された許容差を越えた場合には、今回サンプリングされた時刻Tnに算出された回転数Rtと過去にサンプリングされた時刻Tn−kにおける回転数Rt−kから回転数変化率ΔR/ΔTを下記式により算出する(S8)。
【0049】
ΔR/ΔT=(Rn−Rn−k)/(Tn−Tn−k)
ただし、kは1以上の整数値
そして、回転数変化率ΔR/ΔTと今回のサンプリング時刻から次回サンプリング予定時刻Tn+1における回転数を下記式により予測する(S9)。
【0050】
Rn+1=Rn+(ΔR/ΔT)
こうして得られた予測値Rn+1と目標回転数Rtとを比較し(S10)、予測値Rn+1が目標回転数Rtを越える場合は、目標回転数Rtに到達するまでの時間間隔ΔT’を下記式により推定する。
【0051】
ΔT’=(Rt−Rn)/(ΔR/ΔT)
そして、下記式により目標回転数到達時刻Ttを推定する(S11)。
【0052】
Tt=Tn+ΔT’
そして、推定された時刻を次回サンプリング予定時刻に設定し(S12)、次回サンプリング予定時刻に到達するのを待つ。予測値Rn+1が目標回転数Rtを越えない場合は、そのまま次回サンプリング予定時刻Tn+1に到達するのを待つ。
【0053】
これにより、起動から定格回転数に達する間に一定の回転数間隔で測定する場合において、測定周期の短縮が困難であっても、測定時期を逃すことなく所望の回転数測定することができるという優れた効果を奏する。
【図面の簡単な説明】
【0054】
【図1】本発明の実施の形態に係わる回転振動位相検出装置に構成図。
【図2】本発明の実施の形態における振動センサが加速度センサの場合のセンサ入力部の振動センサ入力部の一例の構成図。
【図3】本発明の実施の形態における振動センサが変位センサの場合のセンサ入力部の振動センサ入力部の一例の構成図。
【図4】本発明の実施の形態における振動センサ入力部のハイパスフィルタによる回転数−位相特性の特性図。
【図5】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の一例を示す構成図。
【図6】図5に示した回転基準センサ入力部の動作波形図。
【図7】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の他の一例を示す構成図。
【図8】図7に示した回転基準センサ入力部の動作波形図。
【図9】本発明の実施の形態におけるセンサ入力部の回転基準センサ入力部の別の他の一例を示す構成図。
【図10】図9に示した回転基準センサ入力部の動作波形図。
【図11】本発明の実施の形態におけるセンサ入力部の振動センサ入力部の他の一例の構成図。
【図12】図11に示した振動センサ入力部の動作波形図。
【図13】本発明の実施の形態におけるセンサ入力部の振動センサ入力部の別の他の一例の構成図。
【図14】図11に示した振動センサ入力部の動作波形図。
【図15】本発明の実施の形態における回転機器が起動して定格回転数まで昇速する際の時間・回転数推移の一例の特性図。
【図16】本発明の実施の形態での振動信号の取り込み動作の手順を示すフローチャート
【図17】従来のハイパスフィルタによる回転数−位相特性の特性図。
【符号の説明】
【0055】
11…回転振動位相検出装置、12…振動センサ、12a…加速度センサ、12b…変位センサ、13…回転基準センサ、14…位相検出装置、15…センサ入力部、16…RAM、17…フラッシュROM、18…入力手段、19…LCD表示などの出力手段、20…マンマシンインターフェース、21…CPU、22…振動センサ入力部、23…、24…、25…ハイパスフィルタ、26…積分器、27…マルチプレクサ、28…アンプ、29…ローパスフィルタ、30…アナログ/デジタル変換器、31…トランスデューサ、32…リミッタ回路、33…ウィンドウコンパレータ、34…絶対値回路、35…コンパレータ、36…Highレベルピークホールド回路、37…Lowレベルピークホールド回路、38…加算回路、39…1/2分圧回路、40…減算回路
【特許請求の範囲】
【請求項1】
回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出装置において、回転機器の回転部の振動変位を検出する振動センサと、回転機器の回転部の回転基準信号を検出する回転基準センサと、前記振動センサで検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置とを備えたことを特徴とする回転振動位相検出装置。
【請求項2】
前記位相検出装置は、前記回転基準センサで検出された回転基準信号の極性やレベルを識別し、回転基準位置を検出することを特徴とする請求項1記載の回転振動位相検出装置。
【請求項3】
前記位相検出装置は、前記振動センサで検出された振動変位に直流信号レベルが重畳されているときは直流信号レベルを相殺した振動信号を出力することを特徴とする回転振動位相検出装置。
【請求項4】
前記位相検出装置は、前記振動センサが加速度センサであり、加速度センサで検出された振動加速度信号に直流信号レベルが重畳されているときは直流信号レベルを相殺した振動信号を出力することを特徴とする回転振動位相検出装置。
【請求項5】
前記位相検出装置は、過去に取得した回転数の履歴から所望する回転数に達するタイミングを予測し、所望回転数における振動信号を取得することを特徴とする請求項1乃至4のいずれか1項記載の回転振動位相検出装置。
【請求項6】
回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出方法において、回転機器の回転部の回転基準信号を検出し、回転機器の回転部の振動変位を検出し、検出された振動変位の信号処理過程で発生した信号位相のずれを補正して振動信号を出力することを特徴とする回転振動位相検出方法。
【請求項1】
回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出装置において、回転機器の回転部の振動変位を検出する振動センサと、回転機器の回転部の回転基準信号を検出する回転基準センサと、前記振動センサで検出された振動変位の信号処理過程で発生した信号位相のずれを補正し振動信号を出力する位相検出装置とを備えたことを特徴とする回転振動位相検出装置。
【請求項2】
前記位相検出装置は、前記回転基準センサで検出された回転基準信号の極性やレベルを識別し、回転基準位置を検出することを特徴とする請求項1記載の回転振動位相検出装置。
【請求項3】
前記位相検出装置は、前記振動センサで検出された振動変位に直流信号レベルが重畳されているときは直流信号レベルを相殺した振動信号を出力することを特徴とする回転振動位相検出装置。
【請求項4】
前記位相検出装置は、前記振動センサが加速度センサであり、加速度センサで検出された振動加速度信号に直流信号レベルが重畳されているときは直流信号レベルを相殺した振動信号を出力することを特徴とする回転振動位相検出装置。
【請求項5】
前記位相検出装置は、過去に取得した回転数の履歴から所望する回転数に達するタイミングを予測し、所望回転数における振動信号を取得することを特徴とする請求項1乃至4のいずれか1項記載の回転振動位相検出装置。
【請求項6】
回転機器の回転振動を検出し、前記回転機器の回転部のアンバランスを検出する回転振動位相検出方法において、回転機器の回転部の回転基準信号を検出し、回転機器の回転部の振動変位を検出し、検出された振動変位の信号処理過程で発生した信号位相のずれを補正して振動信号を出力することを特徴とする回転振動位相検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2008−292222(P2008−292222A)
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願番号】特願2007−136230(P2007−136230)
【出願日】平成19年5月23日(2007.5.23)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(395009938)東芝アイテック株式会社 (82)
【Fターム(参考)】
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願日】平成19年5月23日(2007.5.23)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(395009938)東芝アイテック株式会社 (82)
【Fターム(参考)】
[ Back to top ]