
回転検出システム
【課題】検出対象の数が多くなっても安価に検出対象の回転角度または回転数を検出できる回転検出システムを提供する。
【解決手段】スパイラルインダクタ122が形成されたワッシャ120と、スパイラルインダクタ112が形成されたワッシャ120に対して所定の回転軸を中心に回転するボルト110と、スパイラルインダクタ112が回転することによるスパイラルインダクタ122とスパイラルインダクタ112との間の相互インダクタンスの変化を基に、ボルト110のワッシャ120に対する回転角度または回転数を検出する制御部240と、を備え、スパイラルインダクタ122およびスパイラルインダクタ112はボルト110の回転軸を周回するように形成された渦巻導体を有する。
【解決手段】スパイラルインダクタ122が形成されたワッシャ120と、スパイラルインダクタ112が形成されたワッシャ120に対して所定の回転軸を中心に回転するボルト110と、スパイラルインダクタ112が回転することによるスパイラルインダクタ122とスパイラルインダクタ112との間の相互インダクタンスの変化を基に、ボルト110のワッシャ120に対する回転角度または回転数を検出する制御部240と、を備え、スパイラルインダクタ122およびスパイラルインダクタ112はボルト110の回転軸を周回するように形成された渦巻導体を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転体の回転角度または回転数を検出する回転検出システムに関する。
【背景技術】
【0002】
近代になり、様々な巨大な建造物や機械、また、工場のようなシステムが作られている。このようなシステムには数多くのボルトやモーター、また、回転する駆動部などが存在する。特に、ボルトなどは人間の目が届かない所に数多くあり、その緩みを検出することは困難である。ボルト等が緩み、はずれると、巨大な事故につながりかねない。これらを鑑みると、常に回転角度または回転数を検出してボルト等の緩みを検出し、事故を未然に防ぐシステムが望まれる。回転角度を検出するシステムとして、非特許文献1には、レゾルバを使用した回転角度システムが開示されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Reza Hoseinnezhad, Alireza Bab−Hadiashr, and Peter Harding, “Calibration of Resolver Sensors in Electromechanical Braking Systems: A Modified Recursive Weighted Least−Squares Approach,” IEEE Trans. on Industrial Electronics, vol. 54, NO 2, pp. 1052−1060, April 2007.
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献1に記載のシステムのように、回転角度または回転数の検出対象に複雑な構成の装置を追加するシステムでは、例えば、建造物や機械等に使用される全てのねじの回転角度または回転数を検出しようとした場合など、検出対象の数が多くなるほど膨大な費用がかかるという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、検出対象の数が多くなっても安価に検出対象の回転角度または回転数を検出できる回転検出システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の回転検出システムは、
第1のスパイラルインダクタが形成或いは設置された基体と、
第2のスパイラルインダクタが形成或いは設置され、前記基体に対して所定の回転軸を中心に回転する回転体と、
前記第2のスパイラルインダクタが回転することによる前記第1のスパイラルインダクタと前記第2のスパイラルインダクタとの間の相互インダクタンスの変化を基に、前記回転体の前記基体に対する回転角度または回転数を検出する回転検出手段と、を備え、
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、
前記回転軸を周回するように形成された渦巻導体を有する、
ことを特徴とする。
【0007】
前記回転検出手段は一方のスパイラルインダクタに流れる電流によって、他方のスパイラルインダクタに発生する起電力を測定し、その測定した起電力を基に前記回転体の前記基体に対する回転角度または回転数を検出してもよい。
【0008】
また、前記第1のスパイラルインダクタの前記渦巻導体は、前記第2のスパイラルインダクタと同一形状の前記渦巻導体を反対巻きにした形状をしており、
前記基体と前記回転体は、
前記第1のスパイラルインダクタの形成面と前記第2のスパイラルインダクタの形成面とが対向するように配置され、
前記回転体を回転させたときに、ある回転角度において、前記第1のスパイラルインダクタの前記渦巻導体の形状と前記第2のスパイラルインダクタの前記渦巻導体の形状とが向かい合わせに合致するように配置されてもよい。
【0009】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、
渦の中央もしくは渦の外側にいくに従い導線の間隔が狭くなる渦巻導体を有していてもよい。
【0010】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは略楕円形状の前記渦巻導体を有していてもよい。
【0011】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは曲率が不規則に変化する前記渦巻導体を有していてもよい。
【0012】
また、前記回転体は第1の物体を第2の物体に固定するためのねじであって、ねじ山が形成されたねじ部と前記ねじ部の一端に形成された頭部とを有し、
前記ねじ部は前記第1の物体を貫通し、前記第2の物体に形成されたねじ穴に螺合することによって前記第1の物体を前記第2の物体に固定し、
前記基体は前記第1の物体、前記第2の物体、もしくは、前記第1の物体と前記頭部との間に設置されるワッシャであり、
前記第2のスパイラルインダクタは前記頭部に形成或いは設置されていてもよい。
【発明の効果】
【0013】
本発明によれば、検出対象の数が多くなっても、安価に検出対象の回転角度または回転数を検出することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態にかかる回転検出システムのブロック図である。
【図2】図1に示す締結具に形成された2つのスパイラルインダクタを説明するための図であり、(a)はボルトにスパイラルインダクタを形成した様子を示す図であり、(b)はワッシャにスパイラルインダクタを形成した様子を示す図である。
【図3】2つのスパイラルインダクタを対向させてボルトとワッシャとを配置した様子を示す図である。
【図4】図1に示す電流印加部と電圧計測部の内部の回路の回路図である。
【図5】図1に示す制御部に格納された電圧測定リストを説明するための図である。
【図6】本発明の実施の形態にかかる「回転角度検出処理」を説明するためのフローチャートである。
【図7】右巻きのPrinted Spiral Inductor(PS−Inductor)を示す図であり、(a)はPS−Inductorを上から見た図であり、(b)は図7(a)に示したA−B間の断面図である。
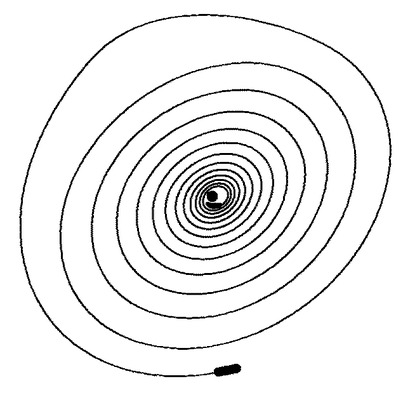
【図8】右巻きのPrinted Quasi Chaos Spiral Inductor(PQCS−Inductor)を示すである。
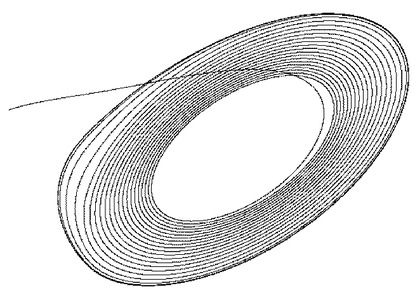
【図9】右巻きのPrinted Chaos Spiral Inductor(PCS−Inductor)を示すである。
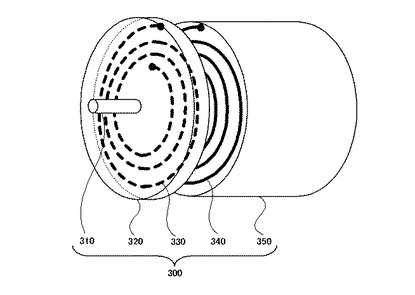
【図10】モーターにスパイラルインダクタを設置した様子を示す図である。
【図11】Chua回路を説明するための図であり、(a)はChua回路のモデル図であり、(b)は図11(a)に示したChua回路に含まれるChua’s diodeの特性を示す図である。
【図12】PQCS−Inductorを説明するための図であり、定常解に至る過程の歪んだアトラクタを示した図である。
【図13】PCS−Inductorを説明するための図であり、PCS−Inductorに適用するカオスアトラクタを示す図である。
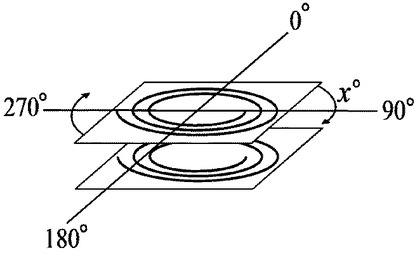
【図14】2枚のスパイラルインダクタの形状が完全に重なった状態を0°とした場合の2枚のスパイラルインダクタの回転方向と回転角度を説明するための図である。
【図15】回転検出システムの回路構成を示す図である。
【図16】PS−Inductorを用いたシステムの周波数特性を示す図である。
【図17】PQCS−Inductorを用いたシステムの周波数特性を示す図である。
【図18】PCS−Inductorを用いたシステムの周波数特性を示す図である。
【図19】PS−Inductorを用いたシステムの増幅率を示す図である。
【図20】PQCS−Inductorを用いたシステムの増幅率を示す図である。
【図21】PCS−Inductorを用いたシステムの周波数を1MHzとした場合の増幅率を示す図である。
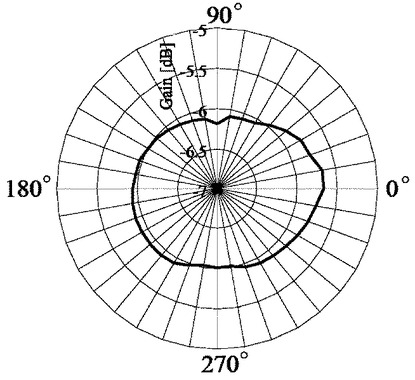
【図22】PCS−Inductorを用いたシステムの周波数を56MHzと67MHzとした場合の増幅率を示す図である。
【発明を実施するための形態】
【0015】
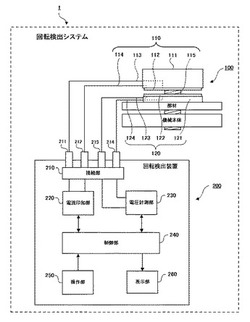
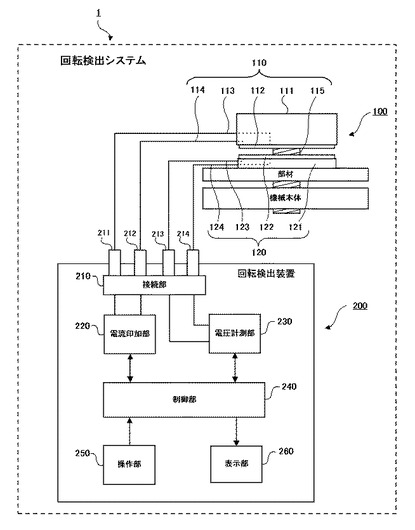
以下、図面を参照して、本実施形態に係る回転検出システムについて説明する。本実施形態にかかる回転検出システム1は、部材に固定されたワッシャに対するボルトの回転角度を検出することでボルトの緩みを検出するシステムである。回転検出システム1は、図1に示すように、締結具100と、回転検出装置200とから構成される。
【0016】
締結具100は配管等の部材を発電機等の機械本体に固定するためのものであり、ボルト110と、ワッシャ120とで構成される。
【0017】
ボルト110は、円柱形の頭部111とねじ山が形成されたねじ部115とで構成される。ボルト110は、ねじ部が部材を貫通し、機械本体に形成されたねじ穴に螺合することで部材を機械本体に固定する。
【0018】
ワッシャ120は、中央に穴のあいた円盤形の座金部121で構成され、ボルト110の頭部111と部材との間に設置される。なお、本実施形態では、ワッシャ120は部材に接着剤等で固定される。これは、ボルト110が回転したときに、ボルト110とワッシャ120とが一緒に回転しないようにすることで、ワッシャ120に対するボルト110の回転角度が分からなくなることを防止するためである。
【0019】
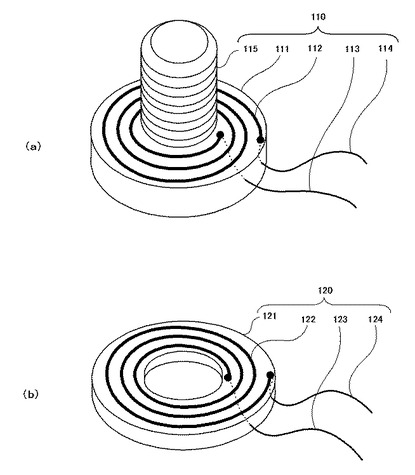
ボルト110の頭部111(座金部121との対向面)には、図2(a)に示すように、スパイラルインダクタ112が形成されている。また、座金部121の片面には、図2(b)に示すように、スパイラルインダクタ122が形成されている。スパイラルインダク112、122は、それぞれ、渦巻状の導体(以下、「渦巻導体」という)が平面状に形成されたインダクタであり、ボルト110の回転軸、すなわち、ねじ部115および座金部121に形成された穴を周回するように形成されている。なお、スパイラルインダクタ112、122の表面は絶縁体の膜でコーティングされている。これは、ボルト110とワッシャ120を使って部材を機械本体に固定したときに、スパイラルインダクタ112、122が互いに接触して導通することを防ぐためである。
【0020】
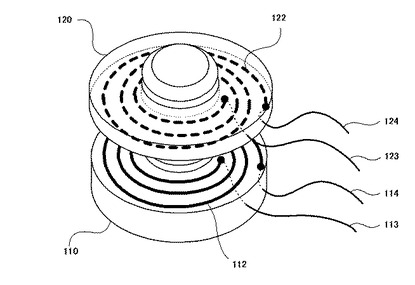
なお、スパイラルインダクタ112、122は、同一形状の渦巻導体をそれぞれ反対巻きにした形状である。すなわち、スパイラルインダクタ112が左巻きのとき、スパイラルインダクタ122は右巻きである。そのため、図3に示すように、2つのスパイラルインダクタが対向するようにボルト110とワッシャ120とを配置し、ボルト110が360°回転する際、ある回転角度において、スパイラルインダクタ112とスパイラルインダクタ122は鏡像関係にある。なお、図3中の太破線は座金部121を透過してスパイラルインダクタ122を見たものである。
【0021】
2つのスパイラルインダクタの形状を反対巻きの同一形状とすることで、2つのスパイラルインダクタが鏡像関係にある回転角度では、2つのスパイラルインダクタを構成する導線は上下に近接し、しかも同一方向を向いた状態となるので、一方のスパイラルインダクタに電流を流して磁束を発生させたときに、他方のスパイラルインダクタはその磁束の影響を強く受けることなる。その結果、他方のスパイラルインダクタは、2つのスパイラルインダクタの形状が一致しないときと比べ、大きな誘導起電力を発生させる。
【0022】
また、頭部111の側面からはリード線113、114が出ている。また、座金部121の側面からはリード線123、124が出ている。これら4本のリード線113、114、123、124は回転検出装置200とスパイラルインダクタ112、122とをそれぞれ接続する。図2に示すように、リード線113、114の一端は、頭部111の内部を通りスパイラルインダクタ112の両端にそれぞれ接続されている。また、リード線123、124の一端は、座金部121の内部を通ってスパイラルインダクタ122の両端の両端に接続されている。
【0023】
回転検出装置200は、スパイラルインダクタ112、122が対向し、一方のスパイラルインダクタが回転したときの相互インダクタンスの変化を利用して、ワッシャ120に対するボルト110の回転角度を検出する装置である。回転検出装置200は、図1に示すように、接続部210と、電流印加部220と、電圧計測部230と、制御部240と、操作部250と、表示部260とで構成される。
【0024】
接続部210は、リード線113、114、123、124の他端が接続される4つの端子211〜214を有する。スパイラルインダクタ112、122と回転検出装置200とは、4本のリード線113、114、123、124を介して接続される。
【0025】
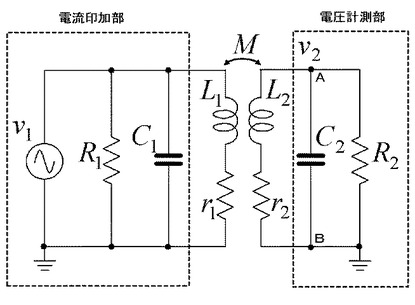
電流印加部220は、一例として図4の電圧印加部に示す回路を内部に有する。リード線113、114が端子211、212に接続されることで、スパイラルインダクタ112と共振回路を構成する。電流印加部220は制御部240から電圧印加命令を受信すると、スパイラルインダクタ112に所定の交流電流を流す。なお、図4の回路において、L1およびL2はそれぞれスパイラルインダクタ112、122のインダクタンス、r1およびr2はスパイラルインダクタ112、122の内部抵抗、R1およびR2は任意の抵抗値を有する抵抗、C1およびC2は任意の容量を有するコンデンサである。また、R1=R2、C1=C2、L1=L2、r1=r2である。
【0026】
電圧計測部230は、一例として図4の電圧計測部に示す回路を内部に有している。リード線123、124が端子213、214に接続され、接続部210を通り電圧計測部230と接続されることで、スパイラルインダクタ122と共振回路を構成する。電圧計測部230は制御部240から電圧計測命令を受信すると、スパイラルインダクタ122に発生した電圧を計測する。具体的には、電圧計測部230の等価回路がC2とR2の並列回路であり、これらは電圧計となっている。ゆえに、図4を用いたシステムにおいては、電圧計の内部抵抗を利用した共振特性を利用している。よって、A−B間の電圧v2を計測することにより、スパイラルインダクタ122に発生した電圧を計測する。電圧を計測すると、電圧計測部230は計測した電圧値を制御部240に送信する。なお、スパイラルインダクタ112、122の接続先は上記と逆であってもよい。すなわち、リード線123、124を端子211、212に接続し、リード線113、114を端子213、214に接続することで、スパイラルインダクタ112を電圧計測部230に接続し、スパイラルインダクタ122を電流印加部220に接続してもよい。
【0027】
制御部240は、例えば、CPU(Central Processing Unit)などのプロセッサ等から構成され、メモリに格納されている制御プログラムに従って動作し、後述の「回転角度検出処理」を含む種々の動作を実行する。
【0028】
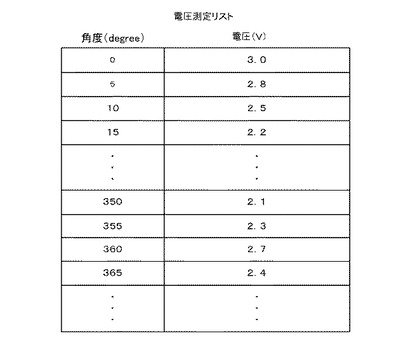
なお、制御部240内部のメモリには、一例として図5に示す「電圧測定リスト」が格納されている。電圧測定リストは、スパイラルインダクタ112に所定の交流電流を流したときに、スパイラルインダクタ122に発生する起電力(誘導起電力や速度起電力等の電磁誘導による起電力)の値(以下、「電圧値」という)を予め測定し、記録したものである。電圧測定リストは、後述の「回転角度検出処理」にて使用される。なお、電圧測定リストに記録されている電圧値は、2つのスパイラルインダクタが鏡像関係にある角度を0°として、スパイラルインダクタ112を5°毎に時計回りに回転させて計測したものである。なお、ボルト110は、回転して緩んでいくにしたがって頭部111と部材(座金部121)との距離が離れていくため、0°のときより360°の時のほうが電圧値は小さくなる。これは、2つのスパイラルインダクタ112、122の形成面が離れていくことによる相互インダクタンスの変化によるものである。
【0029】
操作部250は、ユーザが回転検出装置200を操作するためのユーザインターフェースである。操作部250は回転角度検出処理を開始するための「測定開始ボタン」を備える。ユーザにより測定開始ボタンが押下されると、操作部250は制御部240に測定開始信号を送信する。
【0030】
表示部260は、液晶ディスプレイなどの表示装置で構成され、制御部240からの命令に応じて、制御部240で検出されたボルト110の回転角度を表示出力する。
【0031】
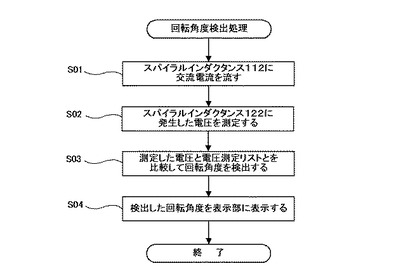
次に、このような構成を有する回転検出システム1の動作について説明する。ユーザが操作部250の測定開始ボタンを押下すると、操作部250は測定開始信号を制御部240に送信する。制御部240は操作部250から測定開始信号を受信すると、図6に示す「回転角度検出処理」を開始する。以下、図6のフローチャートを参照して「回転角度検出処理」について説明する。
【0032】
制御部240は、操作部250から信号を受信すると、電流印加部220に電流印加命令を送信する(ステップS01)。電流印加部220は、電流印加命令を受信すると内部の回路に所定の交流電圧を印加する。
【0033】
電流印加部220が内部の回路に交流電圧を加えると、リード線113、114を通じてスパイラルインダクタ112に電流が流れる。スパイラルインダクタ112に電流が流れると、スパイラルインダクタ112の周囲には磁束が発生する。スパイラルインダクタ112に流れる電流は交流電流であるため、スパイラルインダクタ112が発生させる磁束は常に変化したものになる。そのため、スパイラルインダクタ112に対向して配置されたスパイラルインダクタ122は、この磁束の変化によって内部に誘導起電力を発生させる。
【0034】
制御部240は、電圧計測部230に対して、スパイラルインダクタ122に発生した電圧の計測を命令する(ステップS02)。スパイラルインダクタ122は電圧計測部230内部の回路に接続されており、電圧計測部230は図4に示すA−B間の電圧v2を計測することで、スパイラルインダクタ122に発生した電圧を計測する。なお、電圧v2は所定周期で振幅する交流電圧となっている。そこで、電圧計測部230は電圧v2の振幅を電圧値として計測する。電圧の計測後、電圧計測部230は計測した電圧値を制御部240に送信する。
【0035】
制御部240は、電圧計測部230から電圧値を受信すると、その電圧値と電圧測定リストに記録されている電圧値とを比較して、ボルト110の回転角度を検出する(ステップS03)。具体的には、計測された電圧値に一番近い電圧値を電圧測定リストから特定し、その特定した電圧値と関連付けられる角度をボルト110の回転角度として検出する。例えば、測定された電圧値が2.51Vであり、最初にボルトを設置した角度が5°であるならば、図5に示した電圧測定リストの中で2.51Vに一番近い電圧値は2.5V(10°)であるので、制御部240は「10°」をボルト110の回転角度として検出する。
【0036】
制御部240は、特定したボルト110の回転角度の情報を表示部260に送信する(ステップS04)。表示部260は、制御部240から回転角度の情報を受信すると、受信した回転角度の情報をモニタ等の表示装置に表示する。ユーザは表示部260に表示された回転角度と、ボルト110締結時に上記と同様の方法で測定しておいた回転角度とを比較することで、締結具100の緩みを判断することができる。ボルト110の回転角度の表示が完了したら、制御部240は回転角度検出処理を終了する。
【0037】
本実施形態によれば、スパイラルインダクタを2枚重ねて回転させたときの相互インダクタンスの変化を利用して、ワッシャ120に対するボルト110の回転角度を検出することができる。
【0038】
また、本実施形態の回転検出システム1で使用するスパイラルインダクタは導体を渦巻状にしただけの簡易な構成であるので、これを多くの検出対象に形成したとしても膨大な費用がかかることはない。したがって、本実施形態の回転検出システム1を使用すれば、安価に検出対象の回転角度を検出できる。
【0039】
また、ボルト110およびワッシャ120に形成された2つのスパイラルインダクタは
同一形状の渦巻導体をそれぞれ反対巻きにした形状となっている。そのため、2つのスパイラルインダクタが鏡像関係にある回転角度では、2つの渦巻導体を形成する導線は同一方向を向いて上下に近接した状態となっているので、一方のスパイラルインダクタに電流を流して磁束を変化させたときに、他方のスパイラルインダクタは効率よく電圧を発生させることができる。一方、スパイラルインダクタが鏡像関係にない回転角度では、2つの渦巻導体を形成する導線は異なった方向を向いた状態もしくは離れた状態となっているので、他方のスパイラルインダクタは効率よく電圧を発生させることができない。そのため、2つのスパイラルインダクタが鏡像関係にある回転角度と鏡像関係にない回転角度とでは、他方のスパイラルインダクタに発生する電圧の差は大きなものになり、その結果、回転検出装置200は、形状が一致しないスパイラルインダクタを使用したときと比べ、精度の高い回転角度検出が可能になる。
【0040】
また、ボルト110は、回転して緩んでいくにしたがって頭部111と部材(座金部121)との距離が離れていくため、頭部111および座金部121にスパイラルインダクタを形成することにより、回転検出装置200は、スパイラルインダクタの回転による相互インダクタンスの変化に加え、スパイラルインダクタが離れていくことによる相互インダクタンスの変化も利用してボルト110回転角度を検出することが可能になる(例えば、ボルト110を一回転させても、電圧値は、2つのスパイラルインダクタの形成面が離れたことにより元の値に戻らないので、回転検出装置200は360°以上の回転角度の検出が可能になる)。
【0041】
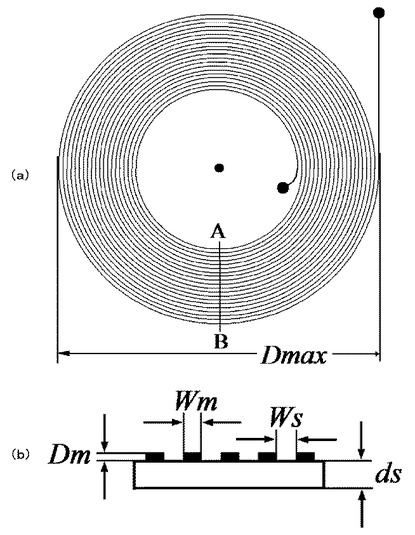
なお、スパイラルインダクタ112、122は、図7(a)に示すように、略円形の渦巻導体を有していてもよい。また、渦の外側にいくほど導線の間隔が狭くなる形状(例えば方物螺旋)の渦巻導体を有していてもよいし、渦の中央にいくほど導線の間隔が狭くなる形状(例えば対数螺旋)の渦巻導体を有していてもよく、曲率がカオティックに変動するような非線形性の比較的高い形状の渦巻導体を有してもよい。異なった間隔の渦巻きのスパイラルインダクタを使用すると、一方のスパイラルインダクタが回転するにしたがって2つの導線の距離は大きくなるため、一方のスパイラルインダクタを360°回転させた際に、他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差が大きくなる。その結果、回転検出装置200による回転角度の検出精度はさらに高まる。
【0042】
また、スパイラルインダクタ112、122は、図8に示すように、略円形の歪んだ形状の渦巻導体を有していてもよいし、図9に示すように、略楕円形状の渦巻導体を有していてもよい。スパイラルインダクタが歪んだ形状や略楕円形状であると、一方のスパイラルインダクタが回転するにしたがって、2つのスパイラルインダクタの形状の違いが大きくなるため、一方のスパイラルインダクタを360°回転させた際に、他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差はさらに大きくなる。その結果、回転検出装置200による回転角度の検出精度はさらに高まる。
【0043】
また、スパイラルインダクタ112、122は、例えば図8や図9に示すように、導体上の各点において曲率が不規則に変化する渦巻導体を有していてもよい(図8や図9の渦巻きは、曲率が不規則に変化するために、導体の一部が円や楕円からはみ出す形で歪んだ形状となっている)。この場合、渦巻胴体はより円に近い(略円形)であるほうが望ましい。スパイラルインダクタの曲率を不規則に変化させることによって、一方のスパイラルインダクタが回転するにしたがって、2つのスパイラルインダクタを形成する導線の距離や方向の違いが大きくなるため、上述と同様に、一方のスパイラルインダクタを360°回転させた際の他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差が大きくなり、回転検出装置200による回転角度の検出精度はさらに高まる。なお、図8や図9に示した渦巻きの形成方法については後述の実施例で述べる。
【0044】
また、スパイラルインダクタ112、122を形成(設置)する方法は、例えば、渦巻導体が形成された基板やシート等をボルト110やワッシャ120等に接着剤等で固定する方法であってもよい。基板やシート等にスパイラルインダクタを形成するのは、ボルト110やワッシャ120等に直接スパイラルインダクタを形成するのと比べて容易であるため、ユーザはさらに安価に回転角度を検出することが可能になる。また、基板やシート等は、ボルトやワッシャ以外にもさまざま物体に設置可能であるため、メーカー等によりあらかじめ検出対象にスパイラルインダクタが形成されていなくても、ユーザは所望の物体にスパイラルインダクタを設置して回転角度の検出をすることが可能になる。
【0045】
スパイラルインダクタを形成する場所は必ずしもボルト110の頭部111や座金部121の表面である必要はない。例えば、頭部111や座金部121の内部に形成してもよいし、ねじ部115を貫通させるために部材等に形成された穴の周囲、もしくは、ねじ部115に螺合させるためのナットにスパイラルインダクタを形成してもよい。
【0046】
回転角度を検出する対象はボルトに限られない。小ねじ、止めねじ、木ねじ等のねじにスパイラルインダクタを形成して回転角度を検出してもよい。ボルトの場合と同様に、ねじの頭部および部材やワッシャ等にそれぞれスパイラルインダクタを形成すれば、2つのスパイラルインダクタの形成面が離れていくことによる相互インダクタンスの変化を利用して、360度以上の回転角度の検出が可能になる。
【0047】
また、回転検出システム1は、モーターの回転軸の回転角度を検出するシステムであってもよい。例えば、図10に示すように、モーター300の回転軸310に円盤状の物体(円盤部320)を固定し、そして、モーター本体350と円盤部320とに、図3と同様に、スパイラルインダクタ330、340を形成することで、モーター本体部330に対する回転軸310の回転角度を検出する。これにより、レゾルバ等の装置を使用する場合と比べて安価に回転角度の検出が可能になる。なお、回転検出装置200はモーター本体部330の中に組み込まれていてもよい。
【0048】
また、回転検出システム1は回転体(モータの回転軸やねじ等)の回転数を検出するシステムであってもよい。例えば、回転検出装置100は、回転体の回転角度が0°の時と180°の時に計測される電圧値を、図5の電圧測定リストと同様に、制御部240内部のメモリにあらかじめ記憶しておいて、制御部240は、0°の時と180°の時の電圧値が電圧計測部230で1回ずつ計測されると、回転体が1回転したと判別して、制御部240内部のメモリに保存してある変数を1カウントアップする。なお、電圧値は、ボルトの例とは違い、回転体が1回転するごとに同じ値が計測されるものとする(すなわち、回転によって2つのスパイラルインダクタの形成面が離れていかないものとする)。制御部240は、所定時間内に変数がいくらカウントアップしたかを検知することによって、所定時間内における回転体の回転数を検出する。これにより、回転検出装置200は回転体の回転数の検出が可能になる。また、回転角度の検出の場合と同様に、同一形状の2つのスパイラルインダクタ、楕円形状のスパイラルインダクタ、および、曲率が不規則に異なるスパイラルインダクタ等を使用することによって、回転検出装置200は精度の高い回転数の検出が可能になる。なおこの場合、回転する円盤部320側のスパイラルインダクタ330の2つの端子と制御部210(図1)との間のリード線(図1におけるリード線113,114に対応)部分に、摺動接点を設け、これを介してスパイラルインダクタ330側に発生する起電力信号を制御部210に送信する構造とされる。
【0049】
なお、本実施の形態ではスパイラルインダクタに発生する起電力を測定する方法を用いて相互インダクタンスの変化を検出したが、相互インダクタンスの変化の検出は起電力の測定による方法に限られない。例えば、スパイラルインダクタを接続した状態の回路(例えば図4等)のインピーダンスを計測したり、また、交流電圧v1の周波数を変化させていくことによって回路の共振周波数を特定したりすることによっても相互インダクタンスの変化を検出することが可能である。もちろん相互インダクタンスを直接測定することによって相互インダクタンスの変化を検出してもよいし、電圧伝送利得の変化を利用して相互インダクタンスの変化を検出してもよい。
【実施例】
【0050】
本実施例では、スパイラルインダクタを形成した2枚のプリント基板を使用し、2枚のプリント基板を対向配置して一方のプリント基板を回転させてその回転角度の検出を行った。最初に本実施例で使用したスパイラルインダクタについて説明する。本実施例では以下の3種類のスパイラルインダクタをプリント基板に形成して用いた。
【0051】
1種類目のスパイラルインダクタは、Printed Spiral Inductor(PS−Inductor)である。これは、図7(a)に示すように、半径が徐々に大きくなる半円を内側から外側に向けて繋げたスパイラルインダクタである。
【0052】
2種類目のスパイラルインダクタは、Printed Quasi Chaos Spiral Inductor(PQCS−Inductor)である。これは、カオス発振する回路(カオス回路)を用い、カオス発振しないパラメータに設定して得られた過渡状態におけるアトラクタを、そのまま導体の形状で現したスパイラルインダクタであって、図8に示すように、導体の一部が円からはみ出す形で歪んだ形状のスパイラルインダクタである。
【0053】
3種類目はPrinted Chaos Spiral Inductor(PCS−Inductor)である。PQCS−Inductorと同じカオス回路を利用し、カオス発振するパラメータに設定して得られたカオスアトラクタを、そのまま導体の形状で現したスパイラルインダクタであって、図9に示すように、略楕円形状のスパイラルインダクタである。
【0054】
以上のスパイラルインダクタは、左右非対称である。本実施例においては、これらのスパイラルインダクタを重ね合わせ、回転させる方式により回転角度を検出する。そのため、導体同士の距離が近いほど相互インダクタンスが大きくなり、回転角度の検出効率も高くなると考えられ、導体面同士を薄い絶縁体を挟み重ねあわせる必要がある。そこで、左右非対称であることを考慮し、サイズおよび各パラメータを同じにした右巻きと左巻きの2つのスパイラルインダクタを、各種類ごとに作成した。以下、本実施例で使用した3種類のスパイラルインダクタのパラメータを示す。
【0055】
(PS−Inductor)
最初にPS−Inductorのパラメータを示す。PS−Inductorのパラメータ値(図7(a)および図7(b)に示した各パラメータの値)は以下のとおりである。
【0056】
Maximum diameter:Dmax=40 mm、
Conductor width:Wm=0.1 mm、
Spacing:WS=0.1 mm、
Number of half−turn:41 half−turn、
Thickness of Conductor :Dm=35 mm、
Thickness of Substrate :ds=1.58 mm、
Material of Substrate :Bakelite.
【0057】
交流電圧の周波数を16MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPS−Inductor:17.24 μH
・左巻きのPS−Inductor:17.07 μH
【0058】
(PQCS−Inductor)
次にPQCS−Inductorのパラメータを示す。本実施例では、PQCS−Inductorを生成するためのカオス回路に、図11(a)に示すChua回路を使用した。式1〜式3に、本実施例で使用するChua回路の回路方程式を示す。
【数1】

【数2】
【数3】
【0059】
ただし、vc1、vc2、及びiLはC1両端の電圧、C2両端の電圧、及びLの電流を表す。g(vc1)はChua’s diodeの特性であり、式4のように表せ、図11(b)に示すような特性となる。
【数4】
【0060】
これらの微分方程式を4次のルンゲ・クッタ法を用いてシミュレートし、スパイラルインダクタのためのアトラクタを作成する。なお、PQCS−Inductorを作成するために使用したカオスアトラクタの各パラメータ値(図11(a)および図11(b)に示した各パラメータの値)は以下の通りである。
【0061】
C1=1.0/9.0 F
C2=0.5 F
L=1.0/7.0 H
G=1/R=0.7 S
m0=−0.5 S
m1=−1.0 S
bp=1.2 V
【0062】
なお、このパラメータではカオスアトラクタは見られないが、定常解に至る過程で歪んだ形状がみられる。図8に本実施例で使用する右巻きのPQCS−Inductorを示す。
【0063】
本方式は、2枚のスパイルインダクタを重ねあわせ、回転させて回転角度を検出するため、円の方が磁場を扱う際、適していると考えられる。そのため、図12に示すアトラクタの座標(xk,yk)を、スパイラルインダクタ用の座標(Xk,Yk)に変換する際、座標(Xk,Yk)のX軸上での存在領域の大きさとY軸上での存在領域の大きさが概ね等しくなるようにxk、ykに任意の値を掛ける。これらを式5に示す。ただし、“k”は0から、アトラクタの始点から終点までのすべての座標の合計数までが入る。
【数5】
【0064】
交流電圧の周波数を39MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPQCS−Inductor:13.34μH
・左巻きのPQCS−Inductor:13.74μH
【0065】
(PCS−Inductor)
PCS−Inductorに用いるカオスアトラクタにも、前述のChua回路を利用する。PCS−Inductorを作成するために使用したカオスアトラクタの各パラメータ値(図11(a)および図11(b)に示した各パラメータの値)は以下の通りである。
【0066】
C1=1.0/9.0 F
C2=1.0 F
L=1.0/7.0 H
G=0.65 S
m0=−0.5 S
m1=−0.8 S
bp=1.0 V
【0067】
カオスアトラクタはしばしば、X−Y平面に写像した時、線同士が交差する。もし、インダクタンスをできる限り大きくしなければ、非常に高い周波数を使う必要があり、大きなコストがかかる。すなわち、スパイラルインダクタを構築する上で線が交差しないことが望ましい。そこで、X−Y平面に写像した際、線同士が交差しない範囲でカオスアトラクタを利用する必要がある。ここで、本実施例で適用するカオスアトラクタを図13に示す。また、x軸とy軸の倍率を変え、できる限り円に近い状態にした、右巻きのPCS−Inductorを図9に示す。
【0068】
交流電圧の周波数を60MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPCS−Inductor:4.12 μH
・左巻きのPCS−Inductor:4.32 μH
【0069】
(回転検出システム)
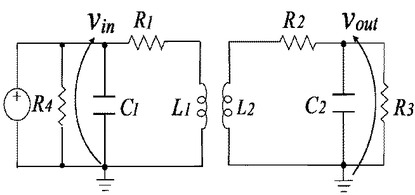
次に本実施例で使用する回転検出システムについて説明する。本実施例における回転検出システムは、重ね合わせたスパイラルインダクタ間の相互インダクタを利用して、回転させた時のGainの変動で回転体の角度を検出するシステムである。計測する際の図を、図14に示す。重ね合わせた2枚のスパイラルインダクタの上側を1次側、下側を2次側として、スパイラルインダクタ間の相互インダクタンスの変動により、Gainを変化させる。図14に示すように、完全に重なった状態を0°とする。実際には、2次側のスパイラルインダクタを固定し、1次側のスパイラルインダクタを回転させて、その際の1次側(入力とする)と2次側(出力とする)の電圧を測定し、Gainを導出する。システムの回路モデルを、図15に示す。2つのインダクタL1、L2と相互インダクタンス、4つの抵抗R1〜R4、そして2つのキャパシタC1、C2を用いて回路を構成する(C1=C2=0.27pF、R3=R4=50kΩであり、R1とR2はスパイラルインダクタの抵抗値である)。
【0070】
(システムの周波数特性)
回転検出システムにおいては、わずかでも1次側が回転し、0°からずれが生じたとき、Gainが大きく変動することが最も望ましい。よって、入力する信号の周波数は、電圧の伝送効率の変化が激しいと考えられる共振周波数より少し低い周波数か、少し高い周波数を用いるべきであると考えられる。そこで、2枚のスパイラルインダクタの中心、巻き方向共に完全に重ね合わさっている状態である0°において、システムの周波数特性を調べ、それよりも少し低い周波数もしくは少し高い周波数を入力電圧の周波数として決定する。
【0071】
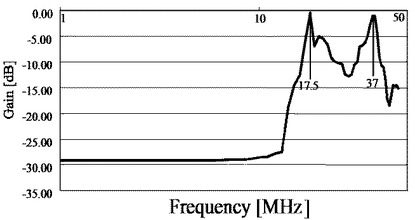
最初にPS−Inductorを使用する場合の周波数を決定する。PS−Inductorを使用した場合のシステムの周波数特性は図16のようになる。ピーク値が約17.5MHzと約37MHzの2つ出ることがわかる。本実施例では、入力電圧の周波数に変動が大きくでると思われる16MHzを使用する。
【0072】
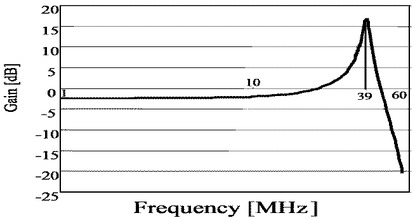
次にPQCS−Inductorを使用する場合の周波数を決定する。PQCS−Inductorを使用した場合のシステムの周波数特性は図17のようになる。共振周波数が39MHz付近にみられるので、本実施例では、入力電圧の周波数に34.5MHzを使用する。
【0073】
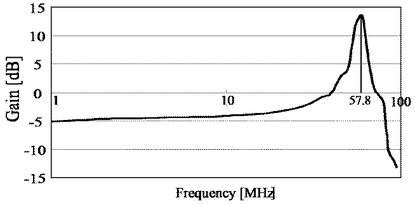
最後にPCS−Inductorを使用する場合の周波数を決定する。PCS−Inductorを使用した場合のシステムの周波数特性は図18のようになる。共振周波数が57.8MHz付近にみられ、特に変動が大きいとみられる、57.8MHz±10MHzの間を利用することが望ましいと考えられるので、本実施例では、入力電圧の周波数に56MHzと67MHzを使用する。また、周波数特性において、Gainの変動が少ない時の、カオスの効果を観察するために、1MHzにおけるPCS−Inductorの回転時のGainの変動も調べる。
【0074】
実測は、以下のように行う。重なり合う二枚のPS−Inductorのうち、1次側のPS−Inductorを0°から360°まで回転させ計測する。その際、入力電圧Vinと出力電圧Voutを5°毎に計測し、入出力に対するGain(=20log10(Vout/Vin))を導出する。ただし、PCS−Inductorを用い、周波数に56MHzと、67MHzを設定した際には、入出力のGainの変動が大きく、回転角度に対して鋭敏であると考えられるため、1°毎に計測を行う。各角度におけるGainをg(θ)とし、計測する最小分析角度をφ[degree]として、分割数をNとする。以下の計算により求めた値を平均変動量avとして各方式による評価を行う。
【数6】
【数7】
【数8】
【0075】
PS−Inductorを使用して入力電圧の周波数を16MHzにした際の結果を、図19に示す。一部で変動が大きく起っていることが解る。平均変動量は、3.61dBである。
【0076】
PQCS-Inductorを使用して入力電圧の周波数を34.5MHzにした際の結果を、図20に示す。PS−Inductorを使用したときより変動が激しく起こっているので、角度検出はPS−Inductorを用いた時より容易である。平均変動量は2.96dBである。
【0077】
PCS−Inductorを使用して入力電圧の周波数を1MHzにした際の結果を、図21に示す。また、PCS−Inductorを使用して入力電圧の周波数を56MHzと67MHzにした際の結果を図22に示す。1MHzの時であっても、PQCS−Inductor や、PS−Inductorを使用したときより変動が大きく、平均変動量は、1.56dBである。さらに、56MHzの際には、明らかな変動がみられ、10.81dBの変動がみられる。また、67MHzでは激しい変動がみられ、平均変動量は24.5dBである。
【0078】
上記のようにして1対のInductorにおける0°から360°までのGainを例えば1°間隔で計測して記録しておき、この1対のInductorをボルト及びワッシャに固定して出力信号を計測し、得られたGainを記録しておいたGainと比較することにより、回転角度が検出される。
【0079】
本実施例では、回転角度によるGainの変動があることを明らかにし、Gainの観測により回転角度が検出できることを示した。特に、PCS−Inductorを利用した回転検出システムにおいて、共振周波数の近くの周波数を用いた場合、他のスパイラルインダクタを用いた場合より、大きな変動を得られることを明らかにし、非線形性の高い形状をしたスパイラルインダクタを用いることが回転角度の検出に有効であることを示した。
【符号の説明】
【0080】
1 回転検出システム
100 締結具
110 ボルト
111 頭部
112 スパイラルインダクタ
113〜114 リード線
115 ねじ部
120 ワッシャ
121 座金部
122 スパイラルインダクタ
123〜124 リード線
200 回転検出装置
210 接続部
211〜214 端子
220 電流印加部
230 電圧計測部
240 制御部
250 操作部
260 表示部
300 モーター
310 回転軸
320 円盤部
330〜340 スパイラルインダクタ
350 モーター本体部
【技術分野】
【0001】
本発明は、回転体の回転角度または回転数を検出する回転検出システムに関する。
【背景技術】
【0002】
近代になり、様々な巨大な建造物や機械、また、工場のようなシステムが作られている。このようなシステムには数多くのボルトやモーター、また、回転する駆動部などが存在する。特に、ボルトなどは人間の目が届かない所に数多くあり、その緩みを検出することは困難である。ボルト等が緩み、はずれると、巨大な事故につながりかねない。これらを鑑みると、常に回転角度または回転数を検出してボルト等の緩みを検出し、事故を未然に防ぐシステムが望まれる。回転角度を検出するシステムとして、非特許文献1には、レゾルバを使用した回転角度システムが開示されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Reza Hoseinnezhad, Alireza Bab−Hadiashr, and Peter Harding, “Calibration of Resolver Sensors in Electromechanical Braking Systems: A Modified Recursive Weighted Least−Squares Approach,” IEEE Trans. on Industrial Electronics, vol. 54, NO 2, pp. 1052−1060, April 2007.
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献1に記載のシステムのように、回転角度または回転数の検出対象に複雑な構成の装置を追加するシステムでは、例えば、建造物や機械等に使用される全てのねじの回転角度または回転数を検出しようとした場合など、検出対象の数が多くなるほど膨大な費用がかかるという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、検出対象の数が多くなっても安価に検出対象の回転角度または回転数を検出できる回転検出システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の回転検出システムは、
第1のスパイラルインダクタが形成或いは設置された基体と、
第2のスパイラルインダクタが形成或いは設置され、前記基体に対して所定の回転軸を中心に回転する回転体と、
前記第2のスパイラルインダクタが回転することによる前記第1のスパイラルインダクタと前記第2のスパイラルインダクタとの間の相互インダクタンスの変化を基に、前記回転体の前記基体に対する回転角度または回転数を検出する回転検出手段と、を備え、
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、
前記回転軸を周回するように形成された渦巻導体を有する、
ことを特徴とする。
【0007】
前記回転検出手段は一方のスパイラルインダクタに流れる電流によって、他方のスパイラルインダクタに発生する起電力を測定し、その測定した起電力を基に前記回転体の前記基体に対する回転角度または回転数を検出してもよい。
【0008】
また、前記第1のスパイラルインダクタの前記渦巻導体は、前記第2のスパイラルインダクタと同一形状の前記渦巻導体を反対巻きにした形状をしており、
前記基体と前記回転体は、
前記第1のスパイラルインダクタの形成面と前記第2のスパイラルインダクタの形成面とが対向するように配置され、
前記回転体を回転させたときに、ある回転角度において、前記第1のスパイラルインダクタの前記渦巻導体の形状と前記第2のスパイラルインダクタの前記渦巻導体の形状とが向かい合わせに合致するように配置されてもよい。
【0009】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、
渦の中央もしくは渦の外側にいくに従い導線の間隔が狭くなる渦巻導体を有していてもよい。
【0010】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは略楕円形状の前記渦巻導体を有していてもよい。
【0011】
また、前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは曲率が不規則に変化する前記渦巻導体を有していてもよい。
【0012】
また、前記回転体は第1の物体を第2の物体に固定するためのねじであって、ねじ山が形成されたねじ部と前記ねじ部の一端に形成された頭部とを有し、
前記ねじ部は前記第1の物体を貫通し、前記第2の物体に形成されたねじ穴に螺合することによって前記第1の物体を前記第2の物体に固定し、
前記基体は前記第1の物体、前記第2の物体、もしくは、前記第1の物体と前記頭部との間に設置されるワッシャであり、
前記第2のスパイラルインダクタは前記頭部に形成或いは設置されていてもよい。
【発明の効果】
【0013】
本発明によれば、検出対象の数が多くなっても、安価に検出対象の回転角度または回転数を検出することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態にかかる回転検出システムのブロック図である。
【図2】図1に示す締結具に形成された2つのスパイラルインダクタを説明するための図であり、(a)はボルトにスパイラルインダクタを形成した様子を示す図であり、(b)はワッシャにスパイラルインダクタを形成した様子を示す図である。
【図3】2つのスパイラルインダクタを対向させてボルトとワッシャとを配置した様子を示す図である。
【図4】図1に示す電流印加部と電圧計測部の内部の回路の回路図である。
【図5】図1に示す制御部に格納された電圧測定リストを説明するための図である。
【図6】本発明の実施の形態にかかる「回転角度検出処理」を説明するためのフローチャートである。
【図7】右巻きのPrinted Spiral Inductor(PS−Inductor)を示す図であり、(a)はPS−Inductorを上から見た図であり、(b)は図7(a)に示したA−B間の断面図である。
【図8】右巻きのPrinted Quasi Chaos Spiral Inductor(PQCS−Inductor)を示すである。
【図9】右巻きのPrinted Chaos Spiral Inductor(PCS−Inductor)を示すである。
【図10】モーターにスパイラルインダクタを設置した様子を示す図である。
【図11】Chua回路を説明するための図であり、(a)はChua回路のモデル図であり、(b)は図11(a)に示したChua回路に含まれるChua’s diodeの特性を示す図である。
【図12】PQCS−Inductorを説明するための図であり、定常解に至る過程の歪んだアトラクタを示した図である。
【図13】PCS−Inductorを説明するための図であり、PCS−Inductorに適用するカオスアトラクタを示す図である。
【図14】2枚のスパイラルインダクタの形状が完全に重なった状態を0°とした場合の2枚のスパイラルインダクタの回転方向と回転角度を説明するための図である。
【図15】回転検出システムの回路構成を示す図である。
【図16】PS−Inductorを用いたシステムの周波数特性を示す図である。
【図17】PQCS−Inductorを用いたシステムの周波数特性を示す図である。
【図18】PCS−Inductorを用いたシステムの周波数特性を示す図である。
【図19】PS−Inductorを用いたシステムの増幅率を示す図である。
【図20】PQCS−Inductorを用いたシステムの増幅率を示す図である。
【図21】PCS−Inductorを用いたシステムの周波数を1MHzとした場合の増幅率を示す図である。
【図22】PCS−Inductorを用いたシステムの周波数を56MHzと67MHzとした場合の増幅率を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して、本実施形態に係る回転検出システムについて説明する。本実施形態にかかる回転検出システム1は、部材に固定されたワッシャに対するボルトの回転角度を検出することでボルトの緩みを検出するシステムである。回転検出システム1は、図1に示すように、締結具100と、回転検出装置200とから構成される。
【0016】
締結具100は配管等の部材を発電機等の機械本体に固定するためのものであり、ボルト110と、ワッシャ120とで構成される。
【0017】
ボルト110は、円柱形の頭部111とねじ山が形成されたねじ部115とで構成される。ボルト110は、ねじ部が部材を貫通し、機械本体に形成されたねじ穴に螺合することで部材を機械本体に固定する。
【0018】
ワッシャ120は、中央に穴のあいた円盤形の座金部121で構成され、ボルト110の頭部111と部材との間に設置される。なお、本実施形態では、ワッシャ120は部材に接着剤等で固定される。これは、ボルト110が回転したときに、ボルト110とワッシャ120とが一緒に回転しないようにすることで、ワッシャ120に対するボルト110の回転角度が分からなくなることを防止するためである。
【0019】
ボルト110の頭部111(座金部121との対向面)には、図2(a)に示すように、スパイラルインダクタ112が形成されている。また、座金部121の片面には、図2(b)に示すように、スパイラルインダクタ122が形成されている。スパイラルインダク112、122は、それぞれ、渦巻状の導体(以下、「渦巻導体」という)が平面状に形成されたインダクタであり、ボルト110の回転軸、すなわち、ねじ部115および座金部121に形成された穴を周回するように形成されている。なお、スパイラルインダクタ112、122の表面は絶縁体の膜でコーティングされている。これは、ボルト110とワッシャ120を使って部材を機械本体に固定したときに、スパイラルインダクタ112、122が互いに接触して導通することを防ぐためである。
【0020】
なお、スパイラルインダクタ112、122は、同一形状の渦巻導体をそれぞれ反対巻きにした形状である。すなわち、スパイラルインダクタ112が左巻きのとき、スパイラルインダクタ122は右巻きである。そのため、図3に示すように、2つのスパイラルインダクタが対向するようにボルト110とワッシャ120とを配置し、ボルト110が360°回転する際、ある回転角度において、スパイラルインダクタ112とスパイラルインダクタ122は鏡像関係にある。なお、図3中の太破線は座金部121を透過してスパイラルインダクタ122を見たものである。
【0021】
2つのスパイラルインダクタの形状を反対巻きの同一形状とすることで、2つのスパイラルインダクタが鏡像関係にある回転角度では、2つのスパイラルインダクタを構成する導線は上下に近接し、しかも同一方向を向いた状態となるので、一方のスパイラルインダクタに電流を流して磁束を発生させたときに、他方のスパイラルインダクタはその磁束の影響を強く受けることなる。その結果、他方のスパイラルインダクタは、2つのスパイラルインダクタの形状が一致しないときと比べ、大きな誘導起電力を発生させる。
【0022】
また、頭部111の側面からはリード線113、114が出ている。また、座金部121の側面からはリード線123、124が出ている。これら4本のリード線113、114、123、124は回転検出装置200とスパイラルインダクタ112、122とをそれぞれ接続する。図2に示すように、リード線113、114の一端は、頭部111の内部を通りスパイラルインダクタ112の両端にそれぞれ接続されている。また、リード線123、124の一端は、座金部121の内部を通ってスパイラルインダクタ122の両端の両端に接続されている。
【0023】
回転検出装置200は、スパイラルインダクタ112、122が対向し、一方のスパイラルインダクタが回転したときの相互インダクタンスの変化を利用して、ワッシャ120に対するボルト110の回転角度を検出する装置である。回転検出装置200は、図1に示すように、接続部210と、電流印加部220と、電圧計測部230と、制御部240と、操作部250と、表示部260とで構成される。
【0024】
接続部210は、リード線113、114、123、124の他端が接続される4つの端子211〜214を有する。スパイラルインダクタ112、122と回転検出装置200とは、4本のリード線113、114、123、124を介して接続される。
【0025】
電流印加部220は、一例として図4の電圧印加部に示す回路を内部に有する。リード線113、114が端子211、212に接続されることで、スパイラルインダクタ112と共振回路を構成する。電流印加部220は制御部240から電圧印加命令を受信すると、スパイラルインダクタ112に所定の交流電流を流す。なお、図4の回路において、L1およびL2はそれぞれスパイラルインダクタ112、122のインダクタンス、r1およびr2はスパイラルインダクタ112、122の内部抵抗、R1およびR2は任意の抵抗値を有する抵抗、C1およびC2は任意の容量を有するコンデンサである。また、R1=R2、C1=C2、L1=L2、r1=r2である。
【0026】
電圧計測部230は、一例として図4の電圧計測部に示す回路を内部に有している。リード線123、124が端子213、214に接続され、接続部210を通り電圧計測部230と接続されることで、スパイラルインダクタ122と共振回路を構成する。電圧計測部230は制御部240から電圧計測命令を受信すると、スパイラルインダクタ122に発生した電圧を計測する。具体的には、電圧計測部230の等価回路がC2とR2の並列回路であり、これらは電圧計となっている。ゆえに、図4を用いたシステムにおいては、電圧計の内部抵抗を利用した共振特性を利用している。よって、A−B間の電圧v2を計測することにより、スパイラルインダクタ122に発生した電圧を計測する。電圧を計測すると、電圧計測部230は計測した電圧値を制御部240に送信する。なお、スパイラルインダクタ112、122の接続先は上記と逆であってもよい。すなわち、リード線123、124を端子211、212に接続し、リード線113、114を端子213、214に接続することで、スパイラルインダクタ112を電圧計測部230に接続し、スパイラルインダクタ122を電流印加部220に接続してもよい。
【0027】
制御部240は、例えば、CPU(Central Processing Unit)などのプロセッサ等から構成され、メモリに格納されている制御プログラムに従って動作し、後述の「回転角度検出処理」を含む種々の動作を実行する。
【0028】
なお、制御部240内部のメモリには、一例として図5に示す「電圧測定リスト」が格納されている。電圧測定リストは、スパイラルインダクタ112に所定の交流電流を流したときに、スパイラルインダクタ122に発生する起電力(誘導起電力や速度起電力等の電磁誘導による起電力)の値(以下、「電圧値」という)を予め測定し、記録したものである。電圧測定リストは、後述の「回転角度検出処理」にて使用される。なお、電圧測定リストに記録されている電圧値は、2つのスパイラルインダクタが鏡像関係にある角度を0°として、スパイラルインダクタ112を5°毎に時計回りに回転させて計測したものである。なお、ボルト110は、回転して緩んでいくにしたがって頭部111と部材(座金部121)との距離が離れていくため、0°のときより360°の時のほうが電圧値は小さくなる。これは、2つのスパイラルインダクタ112、122の形成面が離れていくことによる相互インダクタンスの変化によるものである。
【0029】
操作部250は、ユーザが回転検出装置200を操作するためのユーザインターフェースである。操作部250は回転角度検出処理を開始するための「測定開始ボタン」を備える。ユーザにより測定開始ボタンが押下されると、操作部250は制御部240に測定開始信号を送信する。
【0030】
表示部260は、液晶ディスプレイなどの表示装置で構成され、制御部240からの命令に応じて、制御部240で検出されたボルト110の回転角度を表示出力する。
【0031】
次に、このような構成を有する回転検出システム1の動作について説明する。ユーザが操作部250の測定開始ボタンを押下すると、操作部250は測定開始信号を制御部240に送信する。制御部240は操作部250から測定開始信号を受信すると、図6に示す「回転角度検出処理」を開始する。以下、図6のフローチャートを参照して「回転角度検出処理」について説明する。
【0032】
制御部240は、操作部250から信号を受信すると、電流印加部220に電流印加命令を送信する(ステップS01)。電流印加部220は、電流印加命令を受信すると内部の回路に所定の交流電圧を印加する。
【0033】
電流印加部220が内部の回路に交流電圧を加えると、リード線113、114を通じてスパイラルインダクタ112に電流が流れる。スパイラルインダクタ112に電流が流れると、スパイラルインダクタ112の周囲には磁束が発生する。スパイラルインダクタ112に流れる電流は交流電流であるため、スパイラルインダクタ112が発生させる磁束は常に変化したものになる。そのため、スパイラルインダクタ112に対向して配置されたスパイラルインダクタ122は、この磁束の変化によって内部に誘導起電力を発生させる。
【0034】
制御部240は、電圧計測部230に対して、スパイラルインダクタ122に発生した電圧の計測を命令する(ステップS02)。スパイラルインダクタ122は電圧計測部230内部の回路に接続されており、電圧計測部230は図4に示すA−B間の電圧v2を計測することで、スパイラルインダクタ122に発生した電圧を計測する。なお、電圧v2は所定周期で振幅する交流電圧となっている。そこで、電圧計測部230は電圧v2の振幅を電圧値として計測する。電圧の計測後、電圧計測部230は計測した電圧値を制御部240に送信する。
【0035】
制御部240は、電圧計測部230から電圧値を受信すると、その電圧値と電圧測定リストに記録されている電圧値とを比較して、ボルト110の回転角度を検出する(ステップS03)。具体的には、計測された電圧値に一番近い電圧値を電圧測定リストから特定し、その特定した電圧値と関連付けられる角度をボルト110の回転角度として検出する。例えば、測定された電圧値が2.51Vであり、最初にボルトを設置した角度が5°であるならば、図5に示した電圧測定リストの中で2.51Vに一番近い電圧値は2.5V(10°)であるので、制御部240は「10°」をボルト110の回転角度として検出する。
【0036】
制御部240は、特定したボルト110の回転角度の情報を表示部260に送信する(ステップS04)。表示部260は、制御部240から回転角度の情報を受信すると、受信した回転角度の情報をモニタ等の表示装置に表示する。ユーザは表示部260に表示された回転角度と、ボルト110締結時に上記と同様の方法で測定しておいた回転角度とを比較することで、締結具100の緩みを判断することができる。ボルト110の回転角度の表示が完了したら、制御部240は回転角度検出処理を終了する。
【0037】
本実施形態によれば、スパイラルインダクタを2枚重ねて回転させたときの相互インダクタンスの変化を利用して、ワッシャ120に対するボルト110の回転角度を検出することができる。
【0038】
また、本実施形態の回転検出システム1で使用するスパイラルインダクタは導体を渦巻状にしただけの簡易な構成であるので、これを多くの検出対象に形成したとしても膨大な費用がかかることはない。したがって、本実施形態の回転検出システム1を使用すれば、安価に検出対象の回転角度を検出できる。
【0039】
また、ボルト110およびワッシャ120に形成された2つのスパイラルインダクタは
同一形状の渦巻導体をそれぞれ反対巻きにした形状となっている。そのため、2つのスパイラルインダクタが鏡像関係にある回転角度では、2つの渦巻導体を形成する導線は同一方向を向いて上下に近接した状態となっているので、一方のスパイラルインダクタに電流を流して磁束を変化させたときに、他方のスパイラルインダクタは効率よく電圧を発生させることができる。一方、スパイラルインダクタが鏡像関係にない回転角度では、2つの渦巻導体を形成する導線は異なった方向を向いた状態もしくは離れた状態となっているので、他方のスパイラルインダクタは効率よく電圧を発生させることができない。そのため、2つのスパイラルインダクタが鏡像関係にある回転角度と鏡像関係にない回転角度とでは、他方のスパイラルインダクタに発生する電圧の差は大きなものになり、その結果、回転検出装置200は、形状が一致しないスパイラルインダクタを使用したときと比べ、精度の高い回転角度検出が可能になる。
【0040】
また、ボルト110は、回転して緩んでいくにしたがって頭部111と部材(座金部121)との距離が離れていくため、頭部111および座金部121にスパイラルインダクタを形成することにより、回転検出装置200は、スパイラルインダクタの回転による相互インダクタンスの変化に加え、スパイラルインダクタが離れていくことによる相互インダクタンスの変化も利用してボルト110回転角度を検出することが可能になる(例えば、ボルト110を一回転させても、電圧値は、2つのスパイラルインダクタの形成面が離れたことにより元の値に戻らないので、回転検出装置200は360°以上の回転角度の検出が可能になる)。
【0041】
なお、スパイラルインダクタ112、122は、図7(a)に示すように、略円形の渦巻導体を有していてもよい。また、渦の外側にいくほど導線の間隔が狭くなる形状(例えば方物螺旋)の渦巻導体を有していてもよいし、渦の中央にいくほど導線の間隔が狭くなる形状(例えば対数螺旋)の渦巻導体を有していてもよく、曲率がカオティックに変動するような非線形性の比較的高い形状の渦巻導体を有してもよい。異なった間隔の渦巻きのスパイラルインダクタを使用すると、一方のスパイラルインダクタが回転するにしたがって2つの導線の距離は大きくなるため、一方のスパイラルインダクタを360°回転させた際に、他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差が大きくなる。その結果、回転検出装置200による回転角度の検出精度はさらに高まる。
【0042】
また、スパイラルインダクタ112、122は、図8に示すように、略円形の歪んだ形状の渦巻導体を有していてもよいし、図9に示すように、略楕円形状の渦巻導体を有していてもよい。スパイラルインダクタが歪んだ形状や略楕円形状であると、一方のスパイラルインダクタが回転するにしたがって、2つのスパイラルインダクタの形状の違いが大きくなるため、一方のスパイラルインダクタを360°回転させた際に、他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差はさらに大きくなる。その結果、回転検出装置200による回転角度の検出精度はさらに高まる。
【0043】
また、スパイラルインダクタ112、122は、例えば図8や図9に示すように、導体上の各点において曲率が不規則に変化する渦巻導体を有していてもよい(図8や図9の渦巻きは、曲率が不規則に変化するために、導体の一部が円や楕円からはみ出す形で歪んだ形状となっている)。この場合、渦巻胴体はより円に近い(略円形)であるほうが望ましい。スパイラルインダクタの曲率を不規則に変化させることによって、一方のスパイラルインダクタが回転するにしたがって、2つのスパイラルインダクタを形成する導線の距離や方向の違いが大きくなるため、上述と同様に、一方のスパイラルインダクタを360°回転させた際の他方のスパイラルインダクタが発生させる電圧の最大値と最小値の差が大きくなり、回転検出装置200による回転角度の検出精度はさらに高まる。なお、図8や図9に示した渦巻きの形成方法については後述の実施例で述べる。
【0044】
また、スパイラルインダクタ112、122を形成(設置)する方法は、例えば、渦巻導体が形成された基板やシート等をボルト110やワッシャ120等に接着剤等で固定する方法であってもよい。基板やシート等にスパイラルインダクタを形成するのは、ボルト110やワッシャ120等に直接スパイラルインダクタを形成するのと比べて容易であるため、ユーザはさらに安価に回転角度を検出することが可能になる。また、基板やシート等は、ボルトやワッシャ以外にもさまざま物体に設置可能であるため、メーカー等によりあらかじめ検出対象にスパイラルインダクタが形成されていなくても、ユーザは所望の物体にスパイラルインダクタを設置して回転角度の検出をすることが可能になる。
【0045】
スパイラルインダクタを形成する場所は必ずしもボルト110の頭部111や座金部121の表面である必要はない。例えば、頭部111や座金部121の内部に形成してもよいし、ねじ部115を貫通させるために部材等に形成された穴の周囲、もしくは、ねじ部115に螺合させるためのナットにスパイラルインダクタを形成してもよい。
【0046】
回転角度を検出する対象はボルトに限られない。小ねじ、止めねじ、木ねじ等のねじにスパイラルインダクタを形成して回転角度を検出してもよい。ボルトの場合と同様に、ねじの頭部および部材やワッシャ等にそれぞれスパイラルインダクタを形成すれば、2つのスパイラルインダクタの形成面が離れていくことによる相互インダクタンスの変化を利用して、360度以上の回転角度の検出が可能になる。
【0047】
また、回転検出システム1は、モーターの回転軸の回転角度を検出するシステムであってもよい。例えば、図10に示すように、モーター300の回転軸310に円盤状の物体(円盤部320)を固定し、そして、モーター本体350と円盤部320とに、図3と同様に、スパイラルインダクタ330、340を形成することで、モーター本体部330に対する回転軸310の回転角度を検出する。これにより、レゾルバ等の装置を使用する場合と比べて安価に回転角度の検出が可能になる。なお、回転検出装置200はモーター本体部330の中に組み込まれていてもよい。
【0048】
また、回転検出システム1は回転体(モータの回転軸やねじ等)の回転数を検出するシステムであってもよい。例えば、回転検出装置100は、回転体の回転角度が0°の時と180°の時に計測される電圧値を、図5の電圧測定リストと同様に、制御部240内部のメモリにあらかじめ記憶しておいて、制御部240は、0°の時と180°の時の電圧値が電圧計測部230で1回ずつ計測されると、回転体が1回転したと判別して、制御部240内部のメモリに保存してある変数を1カウントアップする。なお、電圧値は、ボルトの例とは違い、回転体が1回転するごとに同じ値が計測されるものとする(すなわち、回転によって2つのスパイラルインダクタの形成面が離れていかないものとする)。制御部240は、所定時間内に変数がいくらカウントアップしたかを検知することによって、所定時間内における回転体の回転数を検出する。これにより、回転検出装置200は回転体の回転数の検出が可能になる。また、回転角度の検出の場合と同様に、同一形状の2つのスパイラルインダクタ、楕円形状のスパイラルインダクタ、および、曲率が不規則に異なるスパイラルインダクタ等を使用することによって、回転検出装置200は精度の高い回転数の検出が可能になる。なおこの場合、回転する円盤部320側のスパイラルインダクタ330の2つの端子と制御部210(図1)との間のリード線(図1におけるリード線113,114に対応)部分に、摺動接点を設け、これを介してスパイラルインダクタ330側に発生する起電力信号を制御部210に送信する構造とされる。
【0049】
なお、本実施の形態ではスパイラルインダクタに発生する起電力を測定する方法を用いて相互インダクタンスの変化を検出したが、相互インダクタンスの変化の検出は起電力の測定による方法に限られない。例えば、スパイラルインダクタを接続した状態の回路(例えば図4等)のインピーダンスを計測したり、また、交流電圧v1の周波数を変化させていくことによって回路の共振周波数を特定したりすることによっても相互インダクタンスの変化を検出することが可能である。もちろん相互インダクタンスを直接測定することによって相互インダクタンスの変化を検出してもよいし、電圧伝送利得の変化を利用して相互インダクタンスの変化を検出してもよい。
【実施例】
【0050】
本実施例では、スパイラルインダクタを形成した2枚のプリント基板を使用し、2枚のプリント基板を対向配置して一方のプリント基板を回転させてその回転角度の検出を行った。最初に本実施例で使用したスパイラルインダクタについて説明する。本実施例では以下の3種類のスパイラルインダクタをプリント基板に形成して用いた。
【0051】
1種類目のスパイラルインダクタは、Printed Spiral Inductor(PS−Inductor)である。これは、図7(a)に示すように、半径が徐々に大きくなる半円を内側から外側に向けて繋げたスパイラルインダクタである。
【0052】
2種類目のスパイラルインダクタは、Printed Quasi Chaos Spiral Inductor(PQCS−Inductor)である。これは、カオス発振する回路(カオス回路)を用い、カオス発振しないパラメータに設定して得られた過渡状態におけるアトラクタを、そのまま導体の形状で現したスパイラルインダクタであって、図8に示すように、導体の一部が円からはみ出す形で歪んだ形状のスパイラルインダクタである。
【0053】
3種類目はPrinted Chaos Spiral Inductor(PCS−Inductor)である。PQCS−Inductorと同じカオス回路を利用し、カオス発振するパラメータに設定して得られたカオスアトラクタを、そのまま導体の形状で現したスパイラルインダクタであって、図9に示すように、略楕円形状のスパイラルインダクタである。
【0054】
以上のスパイラルインダクタは、左右非対称である。本実施例においては、これらのスパイラルインダクタを重ね合わせ、回転させる方式により回転角度を検出する。そのため、導体同士の距離が近いほど相互インダクタンスが大きくなり、回転角度の検出効率も高くなると考えられ、導体面同士を薄い絶縁体を挟み重ねあわせる必要がある。そこで、左右非対称であることを考慮し、サイズおよび各パラメータを同じにした右巻きと左巻きの2つのスパイラルインダクタを、各種類ごとに作成した。以下、本実施例で使用した3種類のスパイラルインダクタのパラメータを示す。
【0055】
(PS−Inductor)
最初にPS−Inductorのパラメータを示す。PS−Inductorのパラメータ値(図7(a)および図7(b)に示した各パラメータの値)は以下のとおりである。
【0056】
Maximum diameter:Dmax=40 mm、
Conductor width:Wm=0.1 mm、
Spacing:WS=0.1 mm、
Number of half−turn:41 half−turn、
Thickness of Conductor :Dm=35 mm、
Thickness of Substrate :ds=1.58 mm、
Material of Substrate :Bakelite.
【0057】
交流電圧の周波数を16MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPS−Inductor:17.24 μH
・左巻きのPS−Inductor:17.07 μH
【0058】
(PQCS−Inductor)
次にPQCS−Inductorのパラメータを示す。本実施例では、PQCS−Inductorを生成するためのカオス回路に、図11(a)に示すChua回路を使用した。式1〜式3に、本実施例で使用するChua回路の回路方程式を示す。
【数1】
【数2】
【数3】
【0059】
ただし、vc1、vc2、及びiLはC1両端の電圧、C2両端の電圧、及びLの電流を表す。g(vc1)はChua’s diodeの特性であり、式4のように表せ、図11(b)に示すような特性となる。
【数4】
【0060】
これらの微分方程式を4次のルンゲ・クッタ法を用いてシミュレートし、スパイラルインダクタのためのアトラクタを作成する。なお、PQCS−Inductorを作成するために使用したカオスアトラクタの各パラメータ値(図11(a)および図11(b)に示した各パラメータの値)は以下の通りである。
【0061】
C1=1.0/9.0 F
C2=0.5 F
L=1.0/7.0 H
G=1/R=0.7 S
m0=−0.5 S
m1=−1.0 S
bp=1.2 V
【0062】
なお、このパラメータではカオスアトラクタは見られないが、定常解に至る過程で歪んだ形状がみられる。図8に本実施例で使用する右巻きのPQCS−Inductorを示す。
【0063】
本方式は、2枚のスパイルインダクタを重ねあわせ、回転させて回転角度を検出するため、円の方が磁場を扱う際、適していると考えられる。そのため、図12に示すアトラクタの座標(xk,yk)を、スパイラルインダクタ用の座標(Xk,Yk)に変換する際、座標(Xk,Yk)のX軸上での存在領域の大きさとY軸上での存在領域の大きさが概ね等しくなるようにxk、ykに任意の値を掛ける。これらを式5に示す。ただし、“k”は0から、アトラクタの始点から終点までのすべての座標の合計数までが入る。
【数5】
【0064】
交流電圧の周波数を39MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPQCS−Inductor:13.34μH
・左巻きのPQCS−Inductor:13.74μH
【0065】
(PCS−Inductor)
PCS−Inductorに用いるカオスアトラクタにも、前述のChua回路を利用する。PCS−Inductorを作成するために使用したカオスアトラクタの各パラメータ値(図11(a)および図11(b)に示した各パラメータの値)は以下の通りである。
【0066】
C1=1.0/9.0 F
C2=1.0 F
L=1.0/7.0 H
G=0.65 S
m0=−0.5 S
m1=−0.8 S
bp=1.0 V
【0067】
カオスアトラクタはしばしば、X−Y平面に写像した時、線同士が交差する。もし、インダクタンスをできる限り大きくしなければ、非常に高い周波数を使う必要があり、大きなコストがかかる。すなわち、スパイラルインダクタを構築する上で線が交差しないことが望ましい。そこで、X−Y平面に写像した際、線同士が交差しない範囲でカオスアトラクタを利用する必要がある。ここで、本実施例で適用するカオスアトラクタを図13に示す。また、x軸とy軸の倍率を変え、できる限り円に近い状態にした、右巻きのPCS−Inductorを図9に示す。
【0068】
交流電圧の周波数を60MHzとして、右巻きと左巻きそれぞれのインダクタンスを測定した。測定結果は以下のとおりである。
・右巻きのPCS−Inductor:4.12 μH
・左巻きのPCS−Inductor:4.32 μH
【0069】
(回転検出システム)
次に本実施例で使用する回転検出システムについて説明する。本実施例における回転検出システムは、重ね合わせたスパイラルインダクタ間の相互インダクタを利用して、回転させた時のGainの変動で回転体の角度を検出するシステムである。計測する際の図を、図14に示す。重ね合わせた2枚のスパイラルインダクタの上側を1次側、下側を2次側として、スパイラルインダクタ間の相互インダクタンスの変動により、Gainを変化させる。図14に示すように、完全に重なった状態を0°とする。実際には、2次側のスパイラルインダクタを固定し、1次側のスパイラルインダクタを回転させて、その際の1次側(入力とする)と2次側(出力とする)の電圧を測定し、Gainを導出する。システムの回路モデルを、図15に示す。2つのインダクタL1、L2と相互インダクタンス、4つの抵抗R1〜R4、そして2つのキャパシタC1、C2を用いて回路を構成する(C1=C2=0.27pF、R3=R4=50kΩであり、R1とR2はスパイラルインダクタの抵抗値である)。
【0070】
(システムの周波数特性)
回転検出システムにおいては、わずかでも1次側が回転し、0°からずれが生じたとき、Gainが大きく変動することが最も望ましい。よって、入力する信号の周波数は、電圧の伝送効率の変化が激しいと考えられる共振周波数より少し低い周波数か、少し高い周波数を用いるべきであると考えられる。そこで、2枚のスパイラルインダクタの中心、巻き方向共に完全に重ね合わさっている状態である0°において、システムの周波数特性を調べ、それよりも少し低い周波数もしくは少し高い周波数を入力電圧の周波数として決定する。
【0071】
最初にPS−Inductorを使用する場合の周波数を決定する。PS−Inductorを使用した場合のシステムの周波数特性は図16のようになる。ピーク値が約17.5MHzと約37MHzの2つ出ることがわかる。本実施例では、入力電圧の周波数に変動が大きくでると思われる16MHzを使用する。
【0072】
次にPQCS−Inductorを使用する場合の周波数を決定する。PQCS−Inductorを使用した場合のシステムの周波数特性は図17のようになる。共振周波数が39MHz付近にみられるので、本実施例では、入力電圧の周波数に34.5MHzを使用する。
【0073】
最後にPCS−Inductorを使用する場合の周波数を決定する。PCS−Inductorを使用した場合のシステムの周波数特性は図18のようになる。共振周波数が57.8MHz付近にみられ、特に変動が大きいとみられる、57.8MHz±10MHzの間を利用することが望ましいと考えられるので、本実施例では、入力電圧の周波数に56MHzと67MHzを使用する。また、周波数特性において、Gainの変動が少ない時の、カオスの効果を観察するために、1MHzにおけるPCS−Inductorの回転時のGainの変動も調べる。
【0074】
実測は、以下のように行う。重なり合う二枚のPS−Inductorのうち、1次側のPS−Inductorを0°から360°まで回転させ計測する。その際、入力電圧Vinと出力電圧Voutを5°毎に計測し、入出力に対するGain(=20log10(Vout/Vin))を導出する。ただし、PCS−Inductorを用い、周波数に56MHzと、67MHzを設定した際には、入出力のGainの変動が大きく、回転角度に対して鋭敏であると考えられるため、1°毎に計測を行う。各角度におけるGainをg(θ)とし、計測する最小分析角度をφ[degree]として、分割数をNとする。以下の計算により求めた値を平均変動量avとして各方式による評価を行う。
【数6】
【数7】
【数8】
【0075】
PS−Inductorを使用して入力電圧の周波数を16MHzにした際の結果を、図19に示す。一部で変動が大きく起っていることが解る。平均変動量は、3.61dBである。
【0076】
PQCS-Inductorを使用して入力電圧の周波数を34.5MHzにした際の結果を、図20に示す。PS−Inductorを使用したときより変動が激しく起こっているので、角度検出はPS−Inductorを用いた時より容易である。平均変動量は2.96dBである。
【0077】
PCS−Inductorを使用して入力電圧の周波数を1MHzにした際の結果を、図21に示す。また、PCS−Inductorを使用して入力電圧の周波数を56MHzと67MHzにした際の結果を図22に示す。1MHzの時であっても、PQCS−Inductor や、PS−Inductorを使用したときより変動が大きく、平均変動量は、1.56dBである。さらに、56MHzの際には、明らかな変動がみられ、10.81dBの変動がみられる。また、67MHzでは激しい変動がみられ、平均変動量は24.5dBである。
【0078】
上記のようにして1対のInductorにおける0°から360°までのGainを例えば1°間隔で計測して記録しておき、この1対のInductorをボルト及びワッシャに固定して出力信号を計測し、得られたGainを記録しておいたGainと比較することにより、回転角度が検出される。
【0079】
本実施例では、回転角度によるGainの変動があることを明らかにし、Gainの観測により回転角度が検出できることを示した。特に、PCS−Inductorを利用した回転検出システムにおいて、共振周波数の近くの周波数を用いた場合、他のスパイラルインダクタを用いた場合より、大きな変動を得られることを明らかにし、非線形性の高い形状をしたスパイラルインダクタを用いることが回転角度の検出に有効であることを示した。
【符号の説明】
【0080】
1 回転検出システム
100 締結具
110 ボルト
111 頭部
112 スパイラルインダクタ
113〜114 リード線
115 ねじ部
120 ワッシャ
121 座金部
122 スパイラルインダクタ
123〜124 リード線
200 回転検出装置
210 接続部
211〜214 端子
220 電流印加部
230 電圧計測部
240 制御部
250 操作部
260 表示部
300 モーター
310 回転軸
320 円盤部
330〜340 スパイラルインダクタ
350 モーター本体部
【特許請求の範囲】
【請求項1】
第1のスパイラルインダクタが形成或いは設置された基体と、
第2のスパイラルインダクタが形成或いは設置され、前記基体に対して所定の回転軸を中心に回転する回転体と、
前記第2のスパイラルインダクタが回転することによる前記第1のスパイラルインダクタと前記第2のスパイラルインダクタとの間の相互インダクタンスの変化を基に、前記回転体の前記基体に対する回転角度または回転数を検出する回転検出手段と、を備え、
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、前記回転軸を周回するように形成された渦巻導体を有する、
ことを特徴とする回転検出システム。
【請求項2】
前記回転検出手段は一方のスパイラルインダクタに流れる電流によって、他方のスパイラルインダクタに発生する起電力を測定し、その測定した起電力を基に前記回転体の前記基体に対する回転角度または回転数を検出する、
ことを特徴とする請求項1に記載の回転検出システム。
【請求項3】
前記第1のスパイラルインダクタの前記渦巻導体は、前記第2のスパイラルインダクタと同一形状の前記渦巻導体を反対巻きにした形状をしており、
前記基体と前記回転体は、前記第1のスパイラルインダクタの形成面と前記第2のスパイラルインダクタの形成面とが対向するように配置され、
前記回転体を回転させたときに、ある回転角度において、前記第1のスパイラルインダクタの前記渦巻導体の形状と前記第2のスパイラルインダクタの前記渦巻導体の形状とが向かい合わせに合致するように配置される、
ことを特徴とする請求項1または2に記載の回転検出システム。
【請求項4】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは渦の中央もしくは渦の外側にいくに従い導線の間隔が狭くなる渦巻導体を有する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の回転検出システム。
【請求項5】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは略楕円形状の前記渦巻導体を有する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の回転検出システム。
【請求項6】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは曲率が不規則に変化する前記渦巻導体を有する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の回転検出システム。
【請求項7】
前記回転体は第1の物体を第2の物体に固定するためのねじであって、ねじ山が形成されたねじ部と前記ねじ部の一端に形成された頭部とを有し、
前記ねじ部は前記第1の物体を貫通し、前記第2の物体に形成されたねじ穴に螺合することによって前記第1の物体を前記第2の物体に固定し、
前記基体は前記第1の物体、前記第2の物体、もしくは、前記第1の物体と前記頭部との間に設置されるワッシャであり、
前記第2のスパイラルインダクタは前記頭部に形成或いは設置される、
ことを特徴とする請求項1乃至6のいずれか1項に記載の回転検出システム。
【請求項1】
第1のスパイラルインダクタが形成或いは設置された基体と、
第2のスパイラルインダクタが形成或いは設置され、前記基体に対して所定の回転軸を中心に回転する回転体と、
前記第2のスパイラルインダクタが回転することによる前記第1のスパイラルインダクタと前記第2のスパイラルインダクタとの間の相互インダクタンスの変化を基に、前記回転体の前記基体に対する回転角度または回転数を検出する回転検出手段と、を備え、
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは、前記回転軸を周回するように形成された渦巻導体を有する、
ことを特徴とする回転検出システム。
【請求項2】
前記回転検出手段は一方のスパイラルインダクタに流れる電流によって、他方のスパイラルインダクタに発生する起電力を測定し、その測定した起電力を基に前記回転体の前記基体に対する回転角度または回転数を検出する、
ことを特徴とする請求項1に記載の回転検出システム。
【請求項3】
前記第1のスパイラルインダクタの前記渦巻導体は、前記第2のスパイラルインダクタと同一形状の前記渦巻導体を反対巻きにした形状をしており、
前記基体と前記回転体は、前記第1のスパイラルインダクタの形成面と前記第2のスパイラルインダクタの形成面とが対向するように配置され、
前記回転体を回転させたときに、ある回転角度において、前記第1のスパイラルインダクタの前記渦巻導体の形状と前記第2のスパイラルインダクタの前記渦巻導体の形状とが向かい合わせに合致するように配置される、
ことを特徴とする請求項1または2に記載の回転検出システム。
【請求項4】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは渦の中央もしくは渦の外側にいくに従い導線の間隔が狭くなる渦巻導体を有する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の回転検出システム。
【請求項5】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは略楕円形状の前記渦巻導体を有する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の回転検出システム。
【請求項6】
前記第1のスパイラルインダクタおよび前記第2のスパイラルインダクタは曲率が不規則に変化する前記渦巻導体を有する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の回転検出システム。
【請求項7】
前記回転体は第1の物体を第2の物体に固定するためのねじであって、ねじ山が形成されたねじ部と前記ねじ部の一端に形成された頭部とを有し、
前記ねじ部は前記第1の物体を貫通し、前記第2の物体に形成されたねじ穴に螺合することによって前記第1の物体を前記第2の物体に固定し、
前記基体は前記第1の物体、前記第2の物体、もしくは、前記第1の物体と前記頭部との間に設置されるワッシャであり、
前記第2のスパイラルインダクタは前記頭部に形成或いは設置される、
ことを特徴とする請求項1乃至6のいずれか1項に記載の回転検出システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図19】

【図20】

【図21】
【図22】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−52854(P2012−52854A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−194144(P2010−194144)
【出願日】平成22年8月31日(2010.8.31)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人 電子情報通信学会、 電子情報通信学会技術研究報告 信学技報 Vol.110 No.122、 平成22年7月5日
【出願人】(595115592)学校法人鶴学園 (39)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人 電子情報通信学会、 電子情報通信学会技術研究報告 信学技報 Vol.110 No.122、 平成22年7月5日
【出願人】(595115592)学校法人鶴学園 (39)
【Fターム(参考)】
[ Back to top ]