
回転機振動監視システムおよび監視方法
【課題】異常や劣化の有無の判定基準を個々の回転機用に容易に設定可能な回転機振動監視システムおよび監視方法を提供する。
【解決手段】回転機の振動を検出する振動検出手段(1)と、振動検出手段により検出された振動の振動波形データについて、周波数分析を行うデータ処理手段(4)と、周波数分析が行われた振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の振動波形データの振動値を算出する周波数帯域抽出手段(5、6)と、それぞれの周波数帯域に関し、回転機の状態変化の程度の判定に用いる判定しきい値を、回転機の振動応答特性に基づいて設定する判定しきい値設定手段(9)と、それぞれの周波数帯域の振動値と、それぞれの周波数帯域の判定しきい値とを比較することで、回転機の状態変化の程度を判定する状態判定手段(7)と、状態判定手段により判定された回転機の状態を表示する表示手段(11)を備える。
【解決手段】回転機の振動を検出する振動検出手段(1)と、振動検出手段により検出された振動の振動波形データについて、周波数分析を行うデータ処理手段(4)と、周波数分析が行われた振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の振動波形データの振動値を算出する周波数帯域抽出手段(5、6)と、それぞれの周波数帯域に関し、回転機の状態変化の程度の判定に用いる判定しきい値を、回転機の振動応答特性に基づいて設定する判定しきい値設定手段(9)と、それぞれの周波数帯域の振動値と、それぞれの周波数帯域の判定しきい値とを比較することで、回転機の状態変化の程度を判定する状態判定手段(7)と、状態判定手段により判定された回転機の状態を表示する表示手段(11)を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転機振動監視システムおよび監視方法に関する。
【背景技術】
【0002】
発電所などのプラントでは、回転機の振動やプロセス値を常時または定期的に収録し、振動のレベルの変化や周波数特性の変化から、回転機に生じている異常や劣化の有無を早期に検知している。さらには、収録したデータの傾向を分析し、回転機の分解点検時期の推定が行われている。異常や劣化の有無の判断方法の例としては、ISO(International Organization for Standardization)などの判定基準を利用する方法や、複数回の測定により得られた測定データから基準値を求めて、この基準値をベースとした警報値や停止値を設定する方法などが挙げられる(例えば、特許文献1を参照)。
【0003】
回転機に異常や劣化が発生した場合には、振動レベルが変化すると共に、発生する振動周波数に特徴が見られることが知られている。異常や劣化の発生時には、回転数の整数倍の周波数や、転がり軸受の玉の数などから決まる周波数の振動成分の変化が見られることから、これらの振動成分の変化を監視することで、異常や劣化の有無を判断することが可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−109350号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
回転機の異常や劣化の有無の判断は、例えば、上記のように、ISOなどの既存の判定基準や、複数回のデータ測定を元にして設定された警報値や停止値などの判定基準を利用して行われる。
【0006】
しかしながら、ISOなどの既存の判定基準では、回転機の出力の大きさに応じて基準が設定されており、同じ型式の回転機には、同じ基準が適用される。一方、現実には、同じ型式の回転機においても、振動レベルや振動周波数がばらつく場合がほとんどである。そのため、ISOなどの既存の判定基準を利用する場合には、個々の回転機ごとに判定基準を調整し直す必要がある。
【0007】
また、複数回のデータ測定を元にした判定基準を利用する場合には、数ヶ月間データ採取を行った後に判定基準が設定される。そのため、それまでの間は暫定的な判定基準を用いる必要があり、正式な判定基準の取得後に再度基準を設定し直す必要がある。
【0008】
さらに、回転機の分解組み立てを実施した場合においても、振動レベルや振動周波数の変化が生じることが多い。そのため、分解組み立てを実施するごとに、その回転機用の判定基準を再設定する必要が出てくる。また、回転機の定期点検を実施した場合には、その振動応答特性が変化することから、定期点検ごとにも、その回転機用の判定基準を改めて設定し直す必要がある。
【0009】
同じ型式の回転機においても、個々の回転機ごとに振動レベルや振動周波数が異なる原因としては、回転機の支持構造の違いや、組み立て時や据え付け時の調整状態の違いなどが挙げられる。支持構造や調整状態は、回転機の剛性や減衰特性に影響を与える因子であるため、回転機の振動特性を変化させる。そのため、支持構造や調整状態の違いが、振動レベルや振動周波数の違いを生じさせることとなる。
【0010】
本発明は、個々の回転機の振動特性を考慮することで、異常や劣化の有無の判定基準を個々の回転機用に容易に設定可能な回転機振動監視システムおよび監視方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
本発明の一の態様である回転機振動監視システムは、回転機の振動を検出する振動検出手段と、前記振動検出手段により検出された前記振動の振動波形データについて、周波数分析を行うデータ処理手段と、前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出する周波数帯域抽出手段と、前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定する判定しきい値設定手段と、前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定する状態判定手段と、前記状態判定手段により判定された前記回転機の状態を表示する表示手段とを備える。
【0012】
また、本発明の別の態様である回転機振動監視方法は、回転機の振動を検出し、検出された前記振動の振動波形データについて、周波数分析を行い、前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出し、前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定し、前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定し、判定された前記回転機の状態を表示する。
【発明の効果】
【0013】
本発明によれば、個々の回転機の振動特性を考慮することで、異常や劣化の有無の判定基準を個々の回転機用に容易に設定することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態の回転機振動監視システムの構成例を示すシステム構成図である。
【図2】図1の判定しきい値設定部の構成例を示すブロック図である。
【図3】低周波領域の振動応答モデルの例を示した斜視図である。
【図4】高周波領域の振動応答モデルの例を示した斜視図である。
【図5】振動値の予測曲線の例を示したグラフである。
【発明を実施するための最良の形態】
【0015】
本発明の実施形態を、図面に基づいて説明する。
【0016】
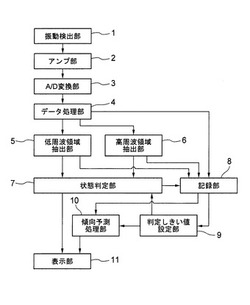
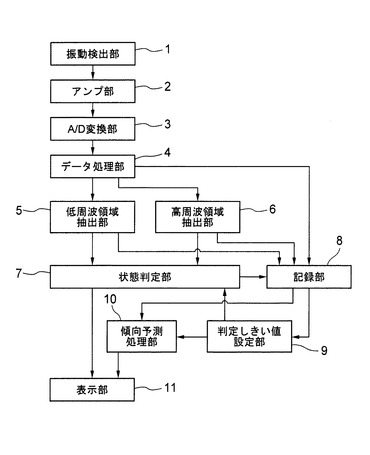
図1は、本発明の実施形態の回転機振動監視システムの構成例を示すシステム構成図である。
【0017】
図1の回転機振動監視システムは、振動検出部1と、アンプ部2と、A/D(Analog to Digital)変換部3と、データ処理部4と、低周波領域抽出部5と、高周波領域抽出部6と、状態判定部7と、記録部8と、判定しきい値設定部9と、傾向予測処理部10と、表示部11とを備える。
【0018】
振動検出部1は、回転機に設置されており、回転機の振動を検出する。振動検出部1は例えば、加速度計や変位計などのセンサである。振動検出部1により検出された振動波形は、アンプ部2により増幅され、A/D変換部3によりアナログ信号からディジタル信号に変換される。
【0019】
A/D変換部3にてディジタル信号に変換された振動波形データは、データ処理部4においてデータ処理される。具体的には、データ処理部4は、振動波形データのフィルタ処理や周波数分析(フーリエ変換)を行う。周波数分析前の振動波形データや、周波数分析後の振動波形データ、即ち、フーリエ変換前の振動波形データや、フーリエ変換後の振動波形データは、記録部8内に記録される。
【0020】
次に、低周波領域抽出部5と高周波領域抽出部6による処理について説明する。
【0021】
データ処理部4にて周波数分析された振動波形データは、低周波領域抽出部5と高周波領域抽出部6によるフィルタ処理により、低周波帯域の振動波形データと、高周波帯域の振動波形データに分離される。
【0022】
そして、低周波領域抽出部5は、低周波帯域の振動波形データの振動レベル(振動値)や特徴周波数(ピーク周波数)を算出する。一方、高周波領域抽出部6は、高周波帯域の振動波形データの振動レベルや特徴周波数を算出する。低周波領域抽出部5と高周波領域抽出部6により算出された振動レベルや特徴周波数は、記録部8内に記録される。低周波領域抽出部5と高周波領域抽出部6は、本発明の周波数帯域抽出手段の例に相当する。
【0023】
低周波領域抽出部5と高周波領域抽出部6は例えば、同じ遮断周波数を有するローパスフィルタとハイパスフィルタである。遮断周波数の値は、例えば1kHz〜10kHzである。なお、両フィルタの遮断周波数は、互いに異なる値であっても構わない。
【0024】
ここで、振動波形データを2つの周波数帯域の振動波形データに分けるのは、後述の処理を振動の特性に応じて行うためである。低周波帯域の振動は、回転機の設置状況、例えば、支持構造の剛性や配管のレイアウトなどによる低い固有振動数に影響を受けやすいと考えられる。一方、高周波帯域の振動は、回転機本体の剛性や締付状況などの影響を受けやすいと考えられる。
【0025】
これらの周波数帯域をまとめて処理する場合には、振動波形の変化が、例えば、転がり軸受の劣化による振動増加に起因するのか、回転機以外の配管などから伝播してくる振動増加に起因するのかの判断が困難である。
【0026】
一方、本実施形態では、振動波形データを周波数帯域ごとに分けて評価するため、発生している事象を分析しやすくなる。
【0027】
なお、回転機の振動波形で問題となる低周波振動の周波数は、0.1kHz〜1kHz程度であると考えられる。一方、回転機の振動波形で問題となる高周波振動の周波数は、20kHz程度であると考えられる。そのため、上記の例では、低周波領域抽出部5と高周波領域抽出部6の遮断周波数の例として、1kHz〜10kHzが挙げられている。
【0028】
次に、低周波領域抽出部5、高周波領域抽出部6に続くブロックによる処理について説明する。
【0029】
判定しきい値設定部9は、低周波帯域と高周波帯域のそれぞれに関し、判定しきい値を設定するブロックである。判定しきい値は、例えば、回転機の異常や劣化の有無など、回転機の状態変化の程度を判定するのに用いられる。なお、判定しきい値設定部9は、後述するように、回転機の振動応答特性に基づいて、判定しきい値を設定する。
【0030】
そして、状態判定部7は、低周波領域抽出部5で算出された振動レベルと、高周波領域抽出部6で算出された振動レベルを、判定しきい値設定部9に記録されているそれぞれの判定しきい値(判定基準値)と比較する。即ち、状態判定部7では、高周波帯域の振動レベルと、高周波帯域用の判定しきい値が比較されると共に、低周波帯域の振動レベルと、低周波帯域用の判定しきい値が比較される。
【0031】
そして、状態判定部7は、これらの比較結果に基づいて、監視対象となっている回転機の異常や劣化の有無を判定する。状態判定部7が、どのような比較結果を異常や劣化と判定するかについては、種々の設定が考えられる。例えば、高周波帯域と低周波帯域のいずれかの振動レベルが判定しきい値以上になった場合に、異常や劣化と判定するという設定が考えられる。判定結果は、前述の振動波形データ、振動レベル、特徴周波数と共に、記録部8内に記録される。
【0032】
なお、低周波領域抽出部5で算出され状態判定部8で使用される振動レベルは、低周波帯域の振動レベルの実効値や最大値や平均絶対値でもよいし、低周波帯域内の特徴周波数における振動レベルの振幅値でもよい。同様に、高周波領域抽出部6で算出され状態判定部8で使用される振動レベルは、高周波帯域の振動レベルの実効値や最大値や平均絶対値でもよいし、高周波帯域内の特徴周波数における振動レベルの振幅値でもよい。
【0033】
図1の回転機振動監視システムは、以上の処理を定期的に実施し、前述の振動波形データ、振動レベル、特徴周波数、判定結果を記録部8内に蓄積していく。
【0034】
そして、傾向予測処理部10は、これらの蓄積データの傾向を分析し、その分析結果に基づいて、監視対象の回転機の今度の状態変化を予測する。例えば、傾向予測処理部10は、蓄積された振動レベルの傾向を分析して、今度の振動レベルや判定結果の変化を予測する。
【0035】
さらに、傾向予測処理部10は、以上のような予測結果から、回転機の異常や劣化が発生する時期や、回転機の分解点検時期も予測する。なお、傾向予測処理部10による傾向予測の詳細については、後述する。
【0036】
表示部11は、状態判定部7による判定結果や、傾向予測処理部10による予測結果を表示するためのディスプレイである。回転機の運転員は、表示部11に判定結果が表示されることで、過去または現在の回転機の状態を知ることができる。回転機の運転員はさらに、表示部11に予測結果が表示されることで、回転機の今後の状態変化の予測結果や、回転機の分解点検時期の予測結果などを知ることができる。
【0037】
なお、本実施形態では、周波数分析された振動波形データを、2つの周波数帯域の振動波形データに分離しているが、3つ以上の周波数帯域に分離しても構わない。この場合、判定しきい値は、これら3つ以上の周波数帯域のそれぞれについて設定される。
【0038】
(1)判定しきい値設定部9の詳細
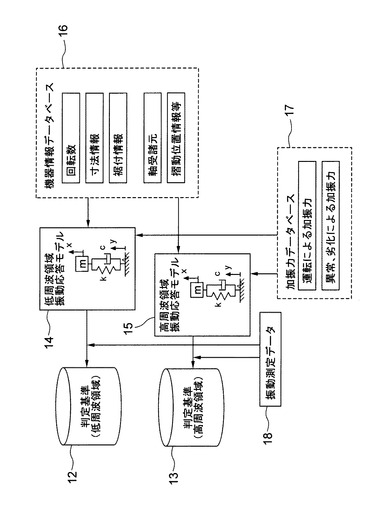
図2は、図1の判定しきい値設定部9の構成例を示すブロック図である。
【0039】
図2に示す構成例では、回転機の振動応答モデルを用いて振動応答特性を評価し、周波数帯域ごとの判定基準を設定する。
【0040】
機器情報データベース16には、監視対象となる回転機の設計情報が格納されている。設計情報の例としては、回転機やその周辺の配管等の寸法、剛性、質量、支持条件等が挙げられる。また、設計情報の別の例としては、回転機の軸受部や軸受箱等、剛性の高い部分の詳細な寸法(例えば、転がり軸受の詳細な寸法)等が挙げられる。
【0041】
判定しきい値設定部9は、回転機やその周辺の配管等の寸法、剛性、質量、支持条件等を機器情報データベース16から取得し、これらの設計情報を元に、低周波領域の振動応答モデル14を構築する。同様に、判定しきい値設定部9は、回転機の剛性の高い部分の詳細な寸法等を機器情報データベース16から取得し、これらの設計情報を元に、高周波領域の振動応答モデル15を構築する。
【0042】
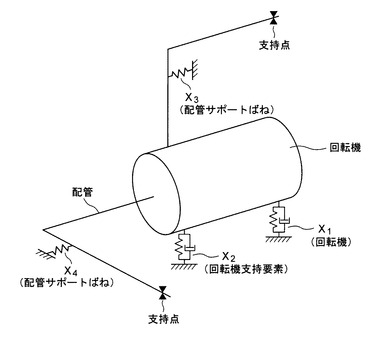
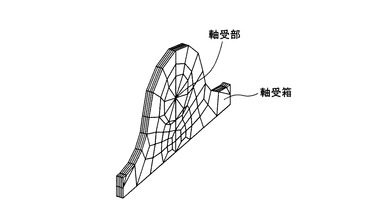
これらの振動応答モデルの例を、図3と図4に示す。図3は、低周波領域の振動応答モデル14の例を示した斜視図であり、図4は、高周波領域の振動応答モデル15の例を示した斜視図である。図3には、回転機と配管とこれらの支持構造を、X1〜X4で示すバネとダッシュポットでモデル化した例が示されている。一方、図4には、回転機の軸受部と軸受箱を有限要素法でモデル化した例が示されている。
【0043】
以下、図2の構成例の説明を続ける。
【0044】
加振力データベース17には、回転機に加わる加振力となる要素のデータが格納されている。加振力の例としては、回転機の運転による加振力や、回転機の異常や劣化による加振力等が挙げられる。
【0045】
判定しきい値設定部9は、低周波領域の振動応答モデル14と、高周波領域の振動応答モデル15と、加振力データベース17から取得したデータを使用して、振動応答解析を行う。振動応答解析では、上記の要素による加振力に対し、回転機がどのような振動応答特性を示すか、即ち、回転機がどのように振動するかが解析される。
【0046】
実際の回転機において異常や劣化が発生した場合には、回転機に対し、回転数の整数倍の加振力が加わる。そこで、上記の振動応答解析では、このような加振力の値を推定して振動応答モデル14、15に入力する。これにより、異常や劣化が発生した場合の振動レベルや振動周波数を推定することが可能となる。
【0047】
このように、判定しきい値設定部9は、振動応答モデル14、15を使用して回転機の振動応答特性を解析し、その解析結果に基づいて、異常や劣化が発生した場合の振動レベルを算出する。
【0048】
そして、判定しきい値設定部9は、振動応答モデル14から算出された振動レベルを、低周波帯域用の判定しきい値に設定し、判定基準データベース12として記憶部8内に記録する。同様に、判定しきい値設定部9は、振動応答モデル15から算出された振動レベルを、高周波帯域用の判定しきい値に設定し、判定基準データベース13として記憶部8内に記録する。
【0049】
このように、本実施形態では、振動応答モデルを導入して判定しきい値を設定することにより、回転機ごとに異なる振動応答特性を考慮した判定処理が可能となる。本実施形態では、回転機ごとに異なる判定しきい値を設定することができるため、精度のよい判定を行うことが可能となる。
【0050】
(2)判定しきい値設定部9の処理の変形例1
次に、再び図2を参照し、判定しきい値設定部9の処理の変形例について説明する。
【0051】
以上の例では、判定しきい値設定部9は、回転機の設計情報から算出された振動応答特性に基づいて、判定しきい値を設定している。一方、判定しきい値設定部9は、図2に示すように、実際の振動測定により得られた測定データ18から振動応答特性を算出し、この振動応答特性に基づいて、判定しきい値を設定してもよい。
【0052】
ここで、実際の回転機の振動応答特性は、プラント内における回転機の据え付け状態により異なる。よって、上記の振動測定は、回転機がプラントに設置された状態で行うことが望ましい。振動測定は例えば、回転機をハンマーで叩くなど、回転機のインパルス試験により行う。そして、このインパルス試験の際に、回転機の固有振動数や減衰係数を測定する。固有振動数や減衰係数の測定値は、振動測定データ18として、判定しきい値設定部9に入力される。
【0053】
この場合、判定しきい値設定部9は、例えば、低周波領域の振動応答モデル14と、高周波領域の振動応答モデル15と、加振力データベース17から取得したデータと、上記の振動測定データ18を使用して、振動応答解析を行う。振動測定データ18は例えば、振動応答モデル14、15の微調整に使用される。このような微調整により、より精度のよい振動レベルや振動周波数の推定が可能となる。
【0054】
なお、上記の測定では、インパルス試験の代わりに、回転機の起動時(電源投入時)の振動波形データの測定を行ってもよい。このような過渡変化状態での測定によっても、回転機の固有振動数は測定可能である。この場合には、振動測定データ18として、この固有振動数の測定値が判定しきい値設定部9に入力される。
【0055】
(3)判定しきい値設定部9の処理の変形例2
図1の回転機振動監視システムは、複数の回転機を監視対象としてもよい。以下、このような場合の判定しきい値設定部9の処理について説明する。
【0056】
ここで、複数の回転機のなかに、判定しきい値がまだ設定されていない回転機と、判定しきい値が既に設定されている回転機が含まれるとする。前者の回転機を、未設定回転機と呼び、後者の回転機を、既設定回転機と呼ぶことにする。
【0057】
この場合、本変形例の判定しきい値設定部9は、未設定回転機の判定しきい値を、既設定回転機の判定しきい値および振動応答特性と、未設定回転機の振動応答特性とに基づいて設定する。例えば、ある加振力による未設定回転機の振動が、同じ加振力による既設定回転機の振動よりも大きい場合には、両者の振動の差または比の大きさに応じて、未設定回転機の判定しきい値を、既設定回転機の判定しきい値よりも大きな値に設定する。このような設定方法によれば、未設定回転機の判定しきい値を容易に設定できるようになる。
【0058】
この場合、既設定回転機の振動応答特性や判定しきい値は、例えば振動測定データ18を使用するなどして、精度をチューニングしておくことが望ましい。これにより、未設定回転機の判定しきい値の精度を向上させることが可能となる。
【0059】
なお、図1の回転機振動監視システムにおいて、振動検出部1は例えば、回転機に設置された加速度計や変位計などのセンサであり、その他のブロック2〜11は例えば、パソコンや携帯情報端末等のコンピュータ内のブロックである。このコンピュータは、回転機にケーブルやネットワークで常時接続されていてもよいし、回転機の運転員が検査時に回転機に接続するようにしてもよい。これは、図1の回転機振動監視システムが、1台の回転機を監視対象とする場合も、複数の回転機を監視対象とする場合も同様である。
【0060】
(4)傾向予測処理部10の詳細
次に、傾向予測処理部10の処理の具体例について説明する。
【0061】
上述のように、図1の回転機振動監視システムは、低周波帯域と高周波帯域のそれぞれについて算出された振動レベル、特徴周波数、判定結果を、定期的に記録部8内に蓄積していく。そして、傾向予測処理部10は、蓄積された振動レベルの傾向を分析し、その分析結果に基づいて、監視対象の回転機の今度の振動レベルや判定結果の変化を予測する。この様子を、図5を参照して説明する。
【0062】
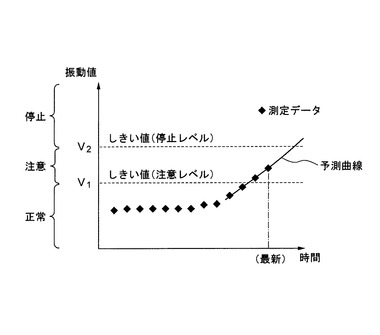
図5は、振動値(振動レベル)の予測曲線の例を示したグラフである。
【0063】
図5のグラフは、記録部8に蓄積された低周波帯域または高周波帯域の振動値を、時系列順にプロットしたものである。図5にはさらに、低周波帯域または高周波帯域用の判定しきい値として、注意判定用の判定しきい値V1と、停止判定用の判定しきい値V2が示されている。
【0064】
傾向予測処理部10は、図5に示すように、最新の振動値を含む複数の振動値を利用して、今後の振動値の変化を表す予測曲線を導出する。予測曲線は例えば、複数の振動値を元に導出されたフィッティングカーブである。そして、傾向予測処理部10は、この予測曲線を利用して、現在よりも後の時点の振動値を予測する。
【0065】
さらに、傾向予測処理部10は、回転機の異常や劣化が発生する時期や、回転機の分解点検時期も予測する。これらの時期は例えば、予測曲線が所定の値に到達する時点を算出することで予測可能である。
【0066】
表示部11には、例えば、状態判定部7による判定結果と、傾向予測処理部10による予測結果が表示される。判定結果としては、例えば、過去および現在における回転機の異常や劣化の有無が、時系列順に表示される。また、予測結果としては、例えば、今後における回転機の異常や劣化の有無が、時系列順に表示される。
【0067】
なお、現在(最新)の振動値が、注意判定用の判定しきい値V1に達している場合、表示部11に、運転者に注意を促す表示を行うようにしてもよい。また、現在の振動値が、停止判定用の判定しきい値V2に達している場合には、表示部11に、運転者に回転機の停止を促す表示を行うようにしてもよい。
【0068】
一方、傾向予測処理部10は、予測曲線が、判定しきい値V1に達する時間や、判定しきい値V2に達する時間を算出してもよい。この場合には、表示部11に、前者の時間を注意を促す時間として表示し、後者の時間を回転機の停止を促す時間として表示するようにしてもよい。また、本実施形態では、前者の時間を、回転機の異常や劣化が発生する時期として取り扱い、後者の時間を、回転機の分解点検時期として取り扱ってもよい。
【0069】
なお、記録部5に振動値等を定期的に蓄積する処理は、例えば、常に一定周期で行ってもよいし、周期を変動させながら行ってもよい。本実施形態では、この蓄積処理を、例えば1ヶ月に1回の周期で行う。この場合、回転機に異常や劣化が見られる場合には、蓄積処理を1日1回の周期に切り替えるなど、周期を変動させるようにしてもよい。
【0070】
(5)本実施形態の効果
最後に、本実施形態の効果について説明する。
【0071】
以上のように、本実施形態では、振動波形データを複数の周波数帯域の振動波形データに分離し、分離された振動波形データを用いて、回転機の異常や劣化の有無を判定する。これにより、本実施形態では、異常や劣化の原因を適切に分析することが可能となる。
【0072】
また、本実施形態の回転機振動監視システムは、回転機の異常や劣化の有無の判定用の判定しきい値を、設計情報や測定データから算出して設定する判定しきい値設定部9を備えている。これにより、本実施形態では、周波数帯域や回転機ごとに異なる判定しきい値を設定することが可能となり、精度のよい判定を行うことが可能となる。
【0073】
また、本実施形態の回転機振動監視システムは、周波数帯域ごとの振動値の算出結果を用いて、回転機の今後の異常や劣化の有無を予測する傾向予測処理部10を備えている。これにより、本実施形態では、状態判定部7による判定と同様に、周波数帯域や回転機の違いを考慮した精度のよい予測を行うことが可能となる。
【0074】
以上、本発明の具体的な態様の例を、本発明の実施形態により説明したが、本発明は、当該実施形態に限定されるものではない。
【符号の説明】
【0075】
1:振動検出部、2:アンプ部、3:A/D変換部、4:データ処理部、
5:低周波領域抽出部、6:高周波領域抽出部、7:状態判定部、8:記録部、
9:判定しきい値設定部、10:傾向予測処理部、11:表示部、
12:低周波領域用の判定基準データベース、
13:高周波領域用の判定基準データベース、
14:低周波領域の振動応答モデル、
15:高周波領域の振動応答モデル、
16:機器情報データベース、17:加振力データベース、18:振動測定データ
【技術分野】
【0001】
本発明は、回転機振動監視システムおよび監視方法に関する。
【背景技術】
【0002】
発電所などのプラントでは、回転機の振動やプロセス値を常時または定期的に収録し、振動のレベルの変化や周波数特性の変化から、回転機に生じている異常や劣化の有無を早期に検知している。さらには、収録したデータの傾向を分析し、回転機の分解点検時期の推定が行われている。異常や劣化の有無の判断方法の例としては、ISO(International Organization for Standardization)などの判定基準を利用する方法や、複数回の測定により得られた測定データから基準値を求めて、この基準値をベースとした警報値や停止値を設定する方法などが挙げられる(例えば、特許文献1を参照)。
【0003】
回転機に異常や劣化が発生した場合には、振動レベルが変化すると共に、発生する振動周波数に特徴が見られることが知られている。異常や劣化の発生時には、回転数の整数倍の周波数や、転がり軸受の玉の数などから決まる周波数の振動成分の変化が見られることから、これらの振動成分の変化を監視することで、異常や劣化の有無を判断することが可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−109350号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
回転機の異常や劣化の有無の判断は、例えば、上記のように、ISOなどの既存の判定基準や、複数回のデータ測定を元にして設定された警報値や停止値などの判定基準を利用して行われる。
【0006】
しかしながら、ISOなどの既存の判定基準では、回転機の出力の大きさに応じて基準が設定されており、同じ型式の回転機には、同じ基準が適用される。一方、現実には、同じ型式の回転機においても、振動レベルや振動周波数がばらつく場合がほとんどである。そのため、ISOなどの既存の判定基準を利用する場合には、個々の回転機ごとに判定基準を調整し直す必要がある。
【0007】
また、複数回のデータ測定を元にした判定基準を利用する場合には、数ヶ月間データ採取を行った後に判定基準が設定される。そのため、それまでの間は暫定的な判定基準を用いる必要があり、正式な判定基準の取得後に再度基準を設定し直す必要がある。
【0008】
さらに、回転機の分解組み立てを実施した場合においても、振動レベルや振動周波数の変化が生じることが多い。そのため、分解組み立てを実施するごとに、その回転機用の判定基準を再設定する必要が出てくる。また、回転機の定期点検を実施した場合には、その振動応答特性が変化することから、定期点検ごとにも、その回転機用の判定基準を改めて設定し直す必要がある。
【0009】
同じ型式の回転機においても、個々の回転機ごとに振動レベルや振動周波数が異なる原因としては、回転機の支持構造の違いや、組み立て時や据え付け時の調整状態の違いなどが挙げられる。支持構造や調整状態は、回転機の剛性や減衰特性に影響を与える因子であるため、回転機の振動特性を変化させる。そのため、支持構造や調整状態の違いが、振動レベルや振動周波数の違いを生じさせることとなる。
【0010】
本発明は、個々の回転機の振動特性を考慮することで、異常や劣化の有無の判定基準を個々の回転機用に容易に設定可能な回転機振動監視システムおよび監視方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
本発明の一の態様である回転機振動監視システムは、回転機の振動を検出する振動検出手段と、前記振動検出手段により検出された前記振動の振動波形データについて、周波数分析を行うデータ処理手段と、前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出する周波数帯域抽出手段と、前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定する判定しきい値設定手段と、前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定する状態判定手段と、前記状態判定手段により判定された前記回転機の状態を表示する表示手段とを備える。
【0012】
また、本発明の別の態様である回転機振動監視方法は、回転機の振動を検出し、検出された前記振動の振動波形データについて、周波数分析を行い、前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出し、前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定し、前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定し、判定された前記回転機の状態を表示する。
【発明の効果】
【0013】
本発明によれば、個々の回転機の振動特性を考慮することで、異常や劣化の有無の判定基準を個々の回転機用に容易に設定することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態の回転機振動監視システムの構成例を示すシステム構成図である。
【図2】図1の判定しきい値設定部の構成例を示すブロック図である。
【図3】低周波領域の振動応答モデルの例を示した斜視図である。
【図4】高周波領域の振動応答モデルの例を示した斜視図である。
【図5】振動値の予測曲線の例を示したグラフである。
【発明を実施するための最良の形態】
【0015】
本発明の実施形態を、図面に基づいて説明する。
【0016】
図1は、本発明の実施形態の回転機振動監視システムの構成例を示すシステム構成図である。
【0017】
図1の回転機振動監視システムは、振動検出部1と、アンプ部2と、A/D(Analog to Digital)変換部3と、データ処理部4と、低周波領域抽出部5と、高周波領域抽出部6と、状態判定部7と、記録部8と、判定しきい値設定部9と、傾向予測処理部10と、表示部11とを備える。
【0018】
振動検出部1は、回転機に設置されており、回転機の振動を検出する。振動検出部1は例えば、加速度計や変位計などのセンサである。振動検出部1により検出された振動波形は、アンプ部2により増幅され、A/D変換部3によりアナログ信号からディジタル信号に変換される。
【0019】
A/D変換部3にてディジタル信号に変換された振動波形データは、データ処理部4においてデータ処理される。具体的には、データ処理部4は、振動波形データのフィルタ処理や周波数分析(フーリエ変換)を行う。周波数分析前の振動波形データや、周波数分析後の振動波形データ、即ち、フーリエ変換前の振動波形データや、フーリエ変換後の振動波形データは、記録部8内に記録される。
【0020】
次に、低周波領域抽出部5と高周波領域抽出部6による処理について説明する。
【0021】
データ処理部4にて周波数分析された振動波形データは、低周波領域抽出部5と高周波領域抽出部6によるフィルタ処理により、低周波帯域の振動波形データと、高周波帯域の振動波形データに分離される。
【0022】
そして、低周波領域抽出部5は、低周波帯域の振動波形データの振動レベル(振動値)や特徴周波数(ピーク周波数)を算出する。一方、高周波領域抽出部6は、高周波帯域の振動波形データの振動レベルや特徴周波数を算出する。低周波領域抽出部5と高周波領域抽出部6により算出された振動レベルや特徴周波数は、記録部8内に記録される。低周波領域抽出部5と高周波領域抽出部6は、本発明の周波数帯域抽出手段の例に相当する。
【0023】
低周波領域抽出部5と高周波領域抽出部6は例えば、同じ遮断周波数を有するローパスフィルタとハイパスフィルタである。遮断周波数の値は、例えば1kHz〜10kHzである。なお、両フィルタの遮断周波数は、互いに異なる値であっても構わない。
【0024】
ここで、振動波形データを2つの周波数帯域の振動波形データに分けるのは、後述の処理を振動の特性に応じて行うためである。低周波帯域の振動は、回転機の設置状況、例えば、支持構造の剛性や配管のレイアウトなどによる低い固有振動数に影響を受けやすいと考えられる。一方、高周波帯域の振動は、回転機本体の剛性や締付状況などの影響を受けやすいと考えられる。
【0025】
これらの周波数帯域をまとめて処理する場合には、振動波形の変化が、例えば、転がり軸受の劣化による振動増加に起因するのか、回転機以外の配管などから伝播してくる振動増加に起因するのかの判断が困難である。
【0026】
一方、本実施形態では、振動波形データを周波数帯域ごとに分けて評価するため、発生している事象を分析しやすくなる。
【0027】
なお、回転機の振動波形で問題となる低周波振動の周波数は、0.1kHz〜1kHz程度であると考えられる。一方、回転機の振動波形で問題となる高周波振動の周波数は、20kHz程度であると考えられる。そのため、上記の例では、低周波領域抽出部5と高周波領域抽出部6の遮断周波数の例として、1kHz〜10kHzが挙げられている。
【0028】
次に、低周波領域抽出部5、高周波領域抽出部6に続くブロックによる処理について説明する。
【0029】
判定しきい値設定部9は、低周波帯域と高周波帯域のそれぞれに関し、判定しきい値を設定するブロックである。判定しきい値は、例えば、回転機の異常や劣化の有無など、回転機の状態変化の程度を判定するのに用いられる。なお、判定しきい値設定部9は、後述するように、回転機の振動応答特性に基づいて、判定しきい値を設定する。
【0030】
そして、状態判定部7は、低周波領域抽出部5で算出された振動レベルと、高周波領域抽出部6で算出された振動レベルを、判定しきい値設定部9に記録されているそれぞれの判定しきい値(判定基準値)と比較する。即ち、状態判定部7では、高周波帯域の振動レベルと、高周波帯域用の判定しきい値が比較されると共に、低周波帯域の振動レベルと、低周波帯域用の判定しきい値が比較される。
【0031】
そして、状態判定部7は、これらの比較結果に基づいて、監視対象となっている回転機の異常や劣化の有無を判定する。状態判定部7が、どのような比較結果を異常や劣化と判定するかについては、種々の設定が考えられる。例えば、高周波帯域と低周波帯域のいずれかの振動レベルが判定しきい値以上になった場合に、異常や劣化と判定するという設定が考えられる。判定結果は、前述の振動波形データ、振動レベル、特徴周波数と共に、記録部8内に記録される。
【0032】
なお、低周波領域抽出部5で算出され状態判定部8で使用される振動レベルは、低周波帯域の振動レベルの実効値や最大値や平均絶対値でもよいし、低周波帯域内の特徴周波数における振動レベルの振幅値でもよい。同様に、高周波領域抽出部6で算出され状態判定部8で使用される振動レベルは、高周波帯域の振動レベルの実効値や最大値や平均絶対値でもよいし、高周波帯域内の特徴周波数における振動レベルの振幅値でもよい。
【0033】
図1の回転機振動監視システムは、以上の処理を定期的に実施し、前述の振動波形データ、振動レベル、特徴周波数、判定結果を記録部8内に蓄積していく。
【0034】
そして、傾向予測処理部10は、これらの蓄積データの傾向を分析し、その分析結果に基づいて、監視対象の回転機の今度の状態変化を予測する。例えば、傾向予測処理部10は、蓄積された振動レベルの傾向を分析して、今度の振動レベルや判定結果の変化を予測する。
【0035】
さらに、傾向予測処理部10は、以上のような予測結果から、回転機の異常や劣化が発生する時期や、回転機の分解点検時期も予測する。なお、傾向予測処理部10による傾向予測の詳細については、後述する。
【0036】
表示部11は、状態判定部7による判定結果や、傾向予測処理部10による予測結果を表示するためのディスプレイである。回転機の運転員は、表示部11に判定結果が表示されることで、過去または現在の回転機の状態を知ることができる。回転機の運転員はさらに、表示部11に予測結果が表示されることで、回転機の今後の状態変化の予測結果や、回転機の分解点検時期の予測結果などを知ることができる。
【0037】
なお、本実施形態では、周波数分析された振動波形データを、2つの周波数帯域の振動波形データに分離しているが、3つ以上の周波数帯域に分離しても構わない。この場合、判定しきい値は、これら3つ以上の周波数帯域のそれぞれについて設定される。
【0038】
(1)判定しきい値設定部9の詳細
図2は、図1の判定しきい値設定部9の構成例を示すブロック図である。
【0039】
図2に示す構成例では、回転機の振動応答モデルを用いて振動応答特性を評価し、周波数帯域ごとの判定基準を設定する。
【0040】
機器情報データベース16には、監視対象となる回転機の設計情報が格納されている。設計情報の例としては、回転機やその周辺の配管等の寸法、剛性、質量、支持条件等が挙げられる。また、設計情報の別の例としては、回転機の軸受部や軸受箱等、剛性の高い部分の詳細な寸法(例えば、転がり軸受の詳細な寸法)等が挙げられる。
【0041】
判定しきい値設定部9は、回転機やその周辺の配管等の寸法、剛性、質量、支持条件等を機器情報データベース16から取得し、これらの設計情報を元に、低周波領域の振動応答モデル14を構築する。同様に、判定しきい値設定部9は、回転機の剛性の高い部分の詳細な寸法等を機器情報データベース16から取得し、これらの設計情報を元に、高周波領域の振動応答モデル15を構築する。
【0042】
これらの振動応答モデルの例を、図3と図4に示す。図3は、低周波領域の振動応答モデル14の例を示した斜視図であり、図4は、高周波領域の振動応答モデル15の例を示した斜視図である。図3には、回転機と配管とこれらの支持構造を、X1〜X4で示すバネとダッシュポットでモデル化した例が示されている。一方、図4には、回転機の軸受部と軸受箱を有限要素法でモデル化した例が示されている。
【0043】
以下、図2の構成例の説明を続ける。
【0044】
加振力データベース17には、回転機に加わる加振力となる要素のデータが格納されている。加振力の例としては、回転機の運転による加振力や、回転機の異常や劣化による加振力等が挙げられる。
【0045】
判定しきい値設定部9は、低周波領域の振動応答モデル14と、高周波領域の振動応答モデル15と、加振力データベース17から取得したデータを使用して、振動応答解析を行う。振動応答解析では、上記の要素による加振力に対し、回転機がどのような振動応答特性を示すか、即ち、回転機がどのように振動するかが解析される。
【0046】
実際の回転機において異常や劣化が発生した場合には、回転機に対し、回転数の整数倍の加振力が加わる。そこで、上記の振動応答解析では、このような加振力の値を推定して振動応答モデル14、15に入力する。これにより、異常や劣化が発生した場合の振動レベルや振動周波数を推定することが可能となる。
【0047】
このように、判定しきい値設定部9は、振動応答モデル14、15を使用して回転機の振動応答特性を解析し、その解析結果に基づいて、異常や劣化が発生した場合の振動レベルを算出する。
【0048】
そして、判定しきい値設定部9は、振動応答モデル14から算出された振動レベルを、低周波帯域用の判定しきい値に設定し、判定基準データベース12として記憶部8内に記録する。同様に、判定しきい値設定部9は、振動応答モデル15から算出された振動レベルを、高周波帯域用の判定しきい値に設定し、判定基準データベース13として記憶部8内に記録する。
【0049】
このように、本実施形態では、振動応答モデルを導入して判定しきい値を設定することにより、回転機ごとに異なる振動応答特性を考慮した判定処理が可能となる。本実施形態では、回転機ごとに異なる判定しきい値を設定することができるため、精度のよい判定を行うことが可能となる。
【0050】
(2)判定しきい値設定部9の処理の変形例1
次に、再び図2を参照し、判定しきい値設定部9の処理の変形例について説明する。
【0051】
以上の例では、判定しきい値設定部9は、回転機の設計情報から算出された振動応答特性に基づいて、判定しきい値を設定している。一方、判定しきい値設定部9は、図2に示すように、実際の振動測定により得られた測定データ18から振動応答特性を算出し、この振動応答特性に基づいて、判定しきい値を設定してもよい。
【0052】
ここで、実際の回転機の振動応答特性は、プラント内における回転機の据え付け状態により異なる。よって、上記の振動測定は、回転機がプラントに設置された状態で行うことが望ましい。振動測定は例えば、回転機をハンマーで叩くなど、回転機のインパルス試験により行う。そして、このインパルス試験の際に、回転機の固有振動数や減衰係数を測定する。固有振動数や減衰係数の測定値は、振動測定データ18として、判定しきい値設定部9に入力される。
【0053】
この場合、判定しきい値設定部9は、例えば、低周波領域の振動応答モデル14と、高周波領域の振動応答モデル15と、加振力データベース17から取得したデータと、上記の振動測定データ18を使用して、振動応答解析を行う。振動測定データ18は例えば、振動応答モデル14、15の微調整に使用される。このような微調整により、より精度のよい振動レベルや振動周波数の推定が可能となる。
【0054】
なお、上記の測定では、インパルス試験の代わりに、回転機の起動時(電源投入時)の振動波形データの測定を行ってもよい。このような過渡変化状態での測定によっても、回転機の固有振動数は測定可能である。この場合には、振動測定データ18として、この固有振動数の測定値が判定しきい値設定部9に入力される。
【0055】
(3)判定しきい値設定部9の処理の変形例2
図1の回転機振動監視システムは、複数の回転機を監視対象としてもよい。以下、このような場合の判定しきい値設定部9の処理について説明する。
【0056】
ここで、複数の回転機のなかに、判定しきい値がまだ設定されていない回転機と、判定しきい値が既に設定されている回転機が含まれるとする。前者の回転機を、未設定回転機と呼び、後者の回転機を、既設定回転機と呼ぶことにする。
【0057】
この場合、本変形例の判定しきい値設定部9は、未設定回転機の判定しきい値を、既設定回転機の判定しきい値および振動応答特性と、未設定回転機の振動応答特性とに基づいて設定する。例えば、ある加振力による未設定回転機の振動が、同じ加振力による既設定回転機の振動よりも大きい場合には、両者の振動の差または比の大きさに応じて、未設定回転機の判定しきい値を、既設定回転機の判定しきい値よりも大きな値に設定する。このような設定方法によれば、未設定回転機の判定しきい値を容易に設定できるようになる。
【0058】
この場合、既設定回転機の振動応答特性や判定しきい値は、例えば振動測定データ18を使用するなどして、精度をチューニングしておくことが望ましい。これにより、未設定回転機の判定しきい値の精度を向上させることが可能となる。
【0059】
なお、図1の回転機振動監視システムにおいて、振動検出部1は例えば、回転機に設置された加速度計や変位計などのセンサであり、その他のブロック2〜11は例えば、パソコンや携帯情報端末等のコンピュータ内のブロックである。このコンピュータは、回転機にケーブルやネットワークで常時接続されていてもよいし、回転機の運転員が検査時に回転機に接続するようにしてもよい。これは、図1の回転機振動監視システムが、1台の回転機を監視対象とする場合も、複数の回転機を監視対象とする場合も同様である。
【0060】
(4)傾向予測処理部10の詳細
次に、傾向予測処理部10の処理の具体例について説明する。
【0061】
上述のように、図1の回転機振動監視システムは、低周波帯域と高周波帯域のそれぞれについて算出された振動レベル、特徴周波数、判定結果を、定期的に記録部8内に蓄積していく。そして、傾向予測処理部10は、蓄積された振動レベルの傾向を分析し、その分析結果に基づいて、監視対象の回転機の今度の振動レベルや判定結果の変化を予測する。この様子を、図5を参照して説明する。
【0062】
図5は、振動値(振動レベル)の予測曲線の例を示したグラフである。
【0063】
図5のグラフは、記録部8に蓄積された低周波帯域または高周波帯域の振動値を、時系列順にプロットしたものである。図5にはさらに、低周波帯域または高周波帯域用の判定しきい値として、注意判定用の判定しきい値V1と、停止判定用の判定しきい値V2が示されている。
【0064】
傾向予測処理部10は、図5に示すように、最新の振動値を含む複数の振動値を利用して、今後の振動値の変化を表す予測曲線を導出する。予測曲線は例えば、複数の振動値を元に導出されたフィッティングカーブである。そして、傾向予測処理部10は、この予測曲線を利用して、現在よりも後の時点の振動値を予測する。
【0065】
さらに、傾向予測処理部10は、回転機の異常や劣化が発生する時期や、回転機の分解点検時期も予測する。これらの時期は例えば、予測曲線が所定の値に到達する時点を算出することで予測可能である。
【0066】
表示部11には、例えば、状態判定部7による判定結果と、傾向予測処理部10による予測結果が表示される。判定結果としては、例えば、過去および現在における回転機の異常や劣化の有無が、時系列順に表示される。また、予測結果としては、例えば、今後における回転機の異常や劣化の有無が、時系列順に表示される。
【0067】
なお、現在(最新)の振動値が、注意判定用の判定しきい値V1に達している場合、表示部11に、運転者に注意を促す表示を行うようにしてもよい。また、現在の振動値が、停止判定用の判定しきい値V2に達している場合には、表示部11に、運転者に回転機の停止を促す表示を行うようにしてもよい。
【0068】
一方、傾向予測処理部10は、予測曲線が、判定しきい値V1に達する時間や、判定しきい値V2に達する時間を算出してもよい。この場合には、表示部11に、前者の時間を注意を促す時間として表示し、後者の時間を回転機の停止を促す時間として表示するようにしてもよい。また、本実施形態では、前者の時間を、回転機の異常や劣化が発生する時期として取り扱い、後者の時間を、回転機の分解点検時期として取り扱ってもよい。
【0069】
なお、記録部5に振動値等を定期的に蓄積する処理は、例えば、常に一定周期で行ってもよいし、周期を変動させながら行ってもよい。本実施形態では、この蓄積処理を、例えば1ヶ月に1回の周期で行う。この場合、回転機に異常や劣化が見られる場合には、蓄積処理を1日1回の周期に切り替えるなど、周期を変動させるようにしてもよい。
【0070】
(5)本実施形態の効果
最後に、本実施形態の効果について説明する。
【0071】
以上のように、本実施形態では、振動波形データを複数の周波数帯域の振動波形データに分離し、分離された振動波形データを用いて、回転機の異常や劣化の有無を判定する。これにより、本実施形態では、異常や劣化の原因を適切に分析することが可能となる。
【0072】
また、本実施形態の回転機振動監視システムは、回転機の異常や劣化の有無の判定用の判定しきい値を、設計情報や測定データから算出して設定する判定しきい値設定部9を備えている。これにより、本実施形態では、周波数帯域や回転機ごとに異なる判定しきい値を設定することが可能となり、精度のよい判定を行うことが可能となる。
【0073】
また、本実施形態の回転機振動監視システムは、周波数帯域ごとの振動値の算出結果を用いて、回転機の今後の異常や劣化の有無を予測する傾向予測処理部10を備えている。これにより、本実施形態では、状態判定部7による判定と同様に、周波数帯域や回転機の違いを考慮した精度のよい予測を行うことが可能となる。
【0074】
以上、本発明の具体的な態様の例を、本発明の実施形態により説明したが、本発明は、当該実施形態に限定されるものではない。
【符号の説明】
【0075】
1:振動検出部、2:アンプ部、3:A/D変換部、4:データ処理部、
5:低周波領域抽出部、6:高周波領域抽出部、7:状態判定部、8:記録部、
9:判定しきい値設定部、10:傾向予測処理部、11:表示部、
12:低周波領域用の判定基準データベース、
13:高周波領域用の判定基準データベース、
14:低周波領域の振動応答モデル、
15:高周波領域の振動応答モデル、
16:機器情報データベース、17:加振力データベース、18:振動測定データ
【特許請求の範囲】
【請求項1】
回転機の振動を検出する振動検出手段と、
前記振動検出手段により検出された前記振動の振動波形データについて、周波数分析を行うデータ処理手段と、
前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出する周波数帯域抽出手段と、
前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定する判定しきい値設定手段と、
前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定する状態判定手段と、
前記状態判定手段により判定された前記回転機の状態を表示する表示手段と、
を備える回転機振動監視システム。
【請求項2】
前記判定しきい値設定手段は、前記判定しきい値が設定されていない回転機である未設定回転機の前記判定しきい値を、前記判定しきい値が設定されている回転機である既設定回転機の前記判定しきい値および前記振動応答特性と、前記未設定回転機の前記振動応答特性とに基づいて設定する請求項1に記載の回転機振動監視システム。
【請求項3】
前記判定しきい値設定手段は、前記回転機の設計情報から算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項4】
前記判定しきい値設定手段は、前記回転機の固有振動数の測定値から算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項5】
前記判定しきい値設定手段は、前記回転機の過渡変化状態での前記振動波形データから算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項6】
前記それぞれの周波数帯域の前記振動値を定期的に記録する記録手段と、
定期的に記録された前記振動値の傾向から、前記回転機の今後の状態変化を予測する傾向予測処理手段と、
をさらに備える請求項1から5のいずれか1項に記載の回転機振動監視システム。
【請求項7】
回転機の振動を検出し、
検出された前記振動の振動波形データについて、周波数分析を行い、
前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出し、
前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定し、
前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定し、
判定された前記回転機の状態を表示する、
回転機振動監視方法。
【請求項1】
回転機の振動を検出する振動検出手段と、
前記振動検出手段により検出された前記振動の振動波形データについて、周波数分析を行うデータ処理手段と、
前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出する周波数帯域抽出手段と、
前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定する判定しきい値設定手段と、
前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定する状態判定手段と、
前記状態判定手段により判定された前記回転機の状態を表示する表示手段と、
を備える回転機振動監視システム。
【請求項2】
前記判定しきい値設定手段は、前記判定しきい値が設定されていない回転機である未設定回転機の前記判定しきい値を、前記判定しきい値が設定されている回転機である既設定回転機の前記判定しきい値および前記振動応答特性と、前記未設定回転機の前記振動応答特性とに基づいて設定する請求項1に記載の回転機振動監視システム。
【請求項3】
前記判定しきい値設定手段は、前記回転機の設計情報から算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項4】
前記判定しきい値設定手段は、前記回転機の固有振動数の測定値から算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項5】
前記判定しきい値設定手段は、前記回転機の過渡変化状態での前記振動波形データから算出された前記振動応答特性に基づいて、前記判定しきい値を設定する請求項1または2に記載の回転機振動監視システム。
【請求項6】
前記それぞれの周波数帯域の前記振動値を定期的に記録する記録手段と、
定期的に記録された前記振動値の傾向から、前記回転機の今後の状態変化を予測する傾向予測処理手段と、
をさらに備える請求項1から5のいずれか1項に記載の回転機振動監視システム。
【請求項7】
回転機の振動を検出し、
検出された前記振動の振動波形データについて、周波数分析を行い、
前記周波数分析が行われた前記振動波形データを、複数の周波数帯域の振動波形データに分離し、それぞれの周波数帯域の前記振動波形データの振動値を算出し、
前記それぞれの周波数帯域に関し、前記回転機の状態変化の程度の判定に用いる判定しきい値を、前記回転機の振動応答特性に基づいて設定し、
前記それぞれの周波数帯域の前記振動値と、前記それぞれの周波数帯域の前記判定しきい値とを比較することで、前記回転機の状態変化の程度を判定し、
判定された前記回転機の状態を表示する、
回転機振動監視方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−163439(P2012−163439A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−24080(P2011−24080)
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]