
回転機械の軸傾き測定方法およびその装置
【課題】回転軸がハウジング等で覆われている場合であっても、回転軸の傾きを非破壊で測定可能とする回転機械の軸傾き測定方法およびその装置を提供する。
【解決手段】鉛直方向に向けられる回転軸11aを備える回転子11、および固定子12がハウジング15内に収容される回転機械の軸傾き測定方法であって、通電コイルに直流電流を与えて、回転軸11aを回転軸11aの周方向において傾斜する方向に拘束する拘束工程S110と、拘束工程S110の後に、直流電流に交流電流を重畳して、回転軸11aを傾斜する方向に振動させる振動工程S120と、振動工程S120時にハウジング15に伝播される回転軸11aの振動状態から、その振動状態に相関する回転軸11aの傾き状態を把握する把握工程S130、S160とを設ける。
【解決手段】鉛直方向に向けられる回転軸11aを備える回転子11、および固定子12がハウジング15内に収容される回転機械の軸傾き測定方法であって、通電コイルに直流電流を与えて、回転軸11aを回転軸11aの周方向において傾斜する方向に拘束する拘束工程S110と、拘束工程S110の後に、直流電流に交流電流を重畳して、回転軸11aを傾斜する方向に振動させる振動工程S120と、振動工程S120時にハウジング15に伝播される回転軸11aの振動状態から、その振動状態に相関する回転軸11aの傾き状態を把握する把握工程S130、S160とを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばモータ等の回転機械の回転軸の傾きを非破壊で測定する傾き測定方法およびその装置に関するものである。
【背景技術】
【0002】
従来の回転軸傾き測定装置として、例えば特許文献1に示されるように、対象となる回転軸の周方向および軸方向の複数箇所の表面近傍に非接触式のレーザ変位センサを設けて、このセンサによって得られる振動量(振れ量)から、回転軸の傾き量および傾き方向を測定するものが知られている。
【特許文献1】特開2001−153757号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1においては、レーザを回転軸に直接当てるようにしているので、回転機械のように回転軸が例えばハウジング等で覆われている場合には、軸の傾きおよび傾き方向を測定することができない。
【0004】
本発明の目的は、上記問題に鑑み、回転軸がハウジング等で覆われている場合であっても、回転軸の傾きを非破壊で測定可能とする回転機械の軸傾き測定方法およびその装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明は上記目的を達成するために、以下の技術的手段を採用する。
【0006】
請求項1に記載の発明では、鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
回転子(11)あるいは固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、回転軸(11a)が回転される回転機械の軸傾き測定方法であって、
通電コイルに直流電流を与えて、回転軸(11a)をこの回転軸(11a)の傾きの生ずる方向に拘束する拘束工程(S110)と、
拘束工程(S110)の後に、直流電流に交流電流を重畳して、回転軸(11a)を傾きの生ずる方向に振動させる振動工程(S120)と、
振動工程(S120)時にハウジング(15)に伝播される回転軸(11a)の振動状態から、その振動状態に相関する回転軸(11a)の傾き状態を把握する把握工程(S130、S160)とを備えることを特徴としている。
【0007】
回転軸(11a)が鉛直方向に向けられる回転機械(10)において、回転軸(11a)は、製造上の各種バラツキによって微小な傾きを持っている。この回転軸(11a)の傾きにより、回転子(11)と固定子(12)との間には、周方向において、本来の隙間よりも狭くなる最小隙間部(a)が形成される形となる。
【0008】
拘束工程(S110)において通常、交流電流を与えるものに対して直流電流を与えることで、回転子(11)は、停止状態となると共に、回転子(11)と固定子(12)との最小隙間部(a)間に最大の吸引力が働き、傾きの生ずる方向に拘束される。
【0009】
そして、振動工程(S120)において、上記の直流電流に交流電流を重畳させることで、電流値を変化させて吸引力を変化させることができるので、回転軸(11a)を傾きの生ずる方向に振動させることができる。
【0010】
更に、把握工程(S130、S160)において、この振動に伴う振動状態をハウジング(15)の表面で検出することで、この振動状態に相関する回転軸(11a)の傾き状態を把握することができる。
【0011】
このように、請求項1に記載の発明は、回転軸(11a)がハウジング(15)によって覆われている場合であっても、回転軸(11a)の傾きを非破壊で測定することができる。
【0012】
請求項2に記載の発明では、振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴としている。
【0013】
これにより、振動状態を具体性および実現性をもって把握することができる。
【0014】
請求項3に記載の発明では、傾き状態は、回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴としている。
【0015】
これにより、傾き状態を具体性および現実性をもって把握することができる。
【0016】
請求項4に記載の発明では、把握工程(S130、S160)において、ハウジング(15)に伝播される回転軸(11a)の振動状態を複数方向に把握し、
複数方向の振動状態からベクトルを合成し、この合成ベクトルから相関する回転軸(11a)の傾き状態を把握することを特徴としている。
【0017】
これにより、より正確な回転軸(11a)の傾き量を把握し、かつ傾き方向を把握することができる。
【0018】
請求項5に記載の発明では、把握工程(S130、S160)の後に、回転軸(11a)を所定角度回転させて、更に、拘束工程(S110)、振動工程(S120)、把握工程(S130、S160)を繰り返すことを特徴としている。
【0019】
これにより、回転軸(11a)、回転子(11)、固定子(12)のできばえのバラツキによる影響を取り除いて、より正確な回転軸(11a)の傾き状態を把握することができる。
【0020】
請求項6に記載の発明では、拘束工程(S110)の前に、通電コイルに交流電流を与えて、回転軸(11a)を通常回転させて、回転軸(11a)の位置を安定化させる安定化工程(S100)を備えることを特徴としている。
【0021】
これにより、拘束する前の回転軸(11a)の位置を安定化させて、拘束工程(S110)、振動工程(S120)を安定化させることができ、把握工程(S130、S160)で得られる傾き状態の信頼性を向上させることができる。
【0022】
請求項7に記載の発明では、振動工程(S120)において重畳する交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つを用いることを特徴としている。
【0023】
これにより、交流電流として使用が容易なものを選択できる。そして、三角波、のこぎり波、矩形波においては、急峻な電流値の変化を伴うため、振動工程(S120)でのより大きな振動振幅が得られ、把握工程(S130、S160)での信頼性を向上させることができる。
【0024】
請求項8〜請求項14に記載の発明は、回転機械の軸傾き測定装置に関するものであり、その技術的意義は、上記請求項1〜請求項7に記載の回転機械の軸傾き測定方法と本質的に同じである。
【0025】
尚、上記各手段の括弧内の符号は、後述する実施形態記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0026】
(第1実施形態)
本発明の第1実施形態における軸傾き測定装置100について、以下、図1〜図11を用いて説明する。まず、図1〜図3を用いて、電動圧縮機10、および軸傾き測定装置100の構成について説明する。尚、図1は電動圧縮機10を示す断面図、図2は軸傾き測定装置100を示す全体構成図、図3は電動圧縮機10のハウジング15に設けられる加速度ピックアップ41、42を示す平面図である。
【0027】
まず、本軸傾き測定装置100による軸傾きの測定対象となる電動圧縮機10について説明する。
【0028】
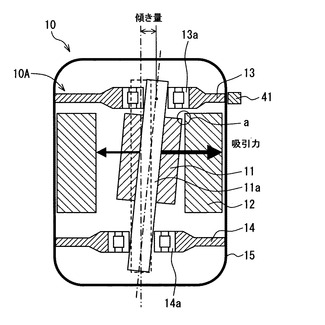
図1に示すように、電動圧縮機10は、例えば密閉型の回転機械であり、ハウジング15内にモータ部10Aと、モータ部10Aの回転軸11aのいずれか一方の先端部に接続されて、このモータ部10Aの駆動力によって作動される図示しない圧縮機部とが収容されて形成されている。
【0029】
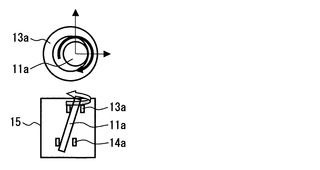
モータ部10Aは、例えば三相交流モータであり、永久磁石から成る筒状体に、回転軸11aが中心軸線に沿って挿通固定されたロータ(回転子)11を有している。ロータ11は、円筒状のハウジング15内に収容されて、回転軸11aの長手方向が鉛直方向となるように配設されている。ハウジング15の内周面には、中心部に軸受け13a、14aが設けられたホルダ13、14が回転軸11aの長手方向に離間して固定されている。そして、ロータ11は、回転軸11aの長手方向の両端部側が軸受け13a、14aに挿通されることで回転可能に支持されている。回転軸11aは、ロータ11としてハウジング15内に収容されることから、外部に露出される回転部位がまったく無いものとなっている。
【0030】
また、ハウジング15内において、ロータ11(筒状体)の外周側には、リング状の鉄心に通電コイル(図示省略)が設けられたステータ(固定子)12が配設されており、このステータ12はハウジング15の内周面に固定されている。通電コイルには、U相、V相、W相の3つのコイルが形成されている。尚、通電コイルは、ステータ12を永久磁石として、鉄心を備えるロータ11に設けられるものとしても良い。
【0031】
モータ部10Aにおいては、軸受け13a、14aの中心位置は、設計上、同心位置となるように設定されているが、実際には製造上の各種バラツキによって、位置ズレが生じている。また、回転軸11aと軸受け13a、14aとの間にはクリアランスが存在し、上記位置ズレとクリアランスとによって、回転軸11aは、この回転軸11aの周方向のいずれかの方向(以下、傾き方向と呼ぶ)に、径方向への微小な傾き量をもって、傾いた状態で回転することになる。そして、この傾きによって、ロータ11とステータ12との間においては、両者11、12間の隙間が最小となる最小隙間部aが存在することになる。
【0032】
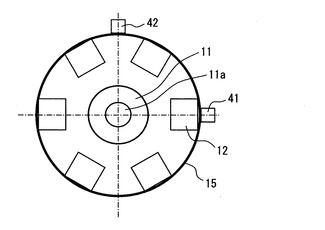
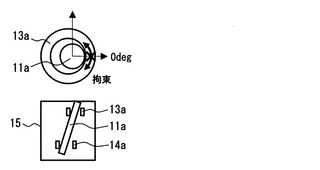
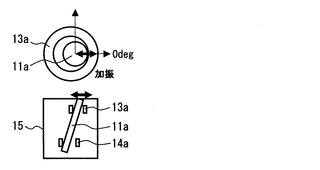
上記回転軸11aの傾き方向は、例えば図3で示した電動圧縮機10の平面図において、水平方向に引いた中心線のハウジング15右側の方向を0度として、反時計回りに、垂直方向に引いた中心線のハウジング15上側の方向を90度、水平方向に引いた中心線のハウジング15左側の方向を180度、垂直方向に引いた中心線のハウジング15下側の方向を270度というように、回転軸11aの周方向の角度によって表すことができる。また、傾き量は、例えば軸受け13a、14a間における回転軸11aの径方向における中心位置のズレ量として表すことができる。
【0033】
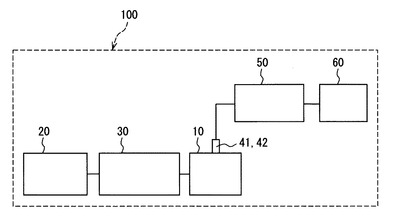
図2に示すように、軸傾き測定装置100は、上記電動圧縮機10の回転軸11aの傾き状態(傾き方向、傾き量)を測定する装置であり、電力供給部20、モータ制御部30、加速度ピックアップ41、42、信号増幅部50、信号処理部60を備えている。
【0034】
電力供給部20は、モータ部10Aの通電コイルへの交流電流、あるいは直流電流を供給する機器であり、後述するモータ制御部30に接続されている。ここでは、交流電流は通常の正弦波を用いている。
【0035】
モータ制御部30は、電力供給部20からの交流電流、あるいは直流電流を、電動圧縮機10のモータ部10A(通電コイル)に対して異なるタイミングで供給可能とする電流制御部である。
【0036】
加速度ピックアップ41、42は、モータ部10Aの作動時に回転軸11aの傾きに伴って発生し、ハウジング15表面に伝播される振動状態(ここでは振動の加速度としている)を検出する検出部であり、ハウジング15のホルダ13が設けられた外周部で、図3に示すように、ハウジング15の周方向に90度離れた位置に固定されている。
【0037】
図3において、加速度ピックアップ41は、この加速度ピックアップ41とハウジング15の中心とを通る方向(図3中の水平方向であり、以下、X方向とする)の発生振動加速度Gxを検出するようになっており、また、加速度ピックアップ42は、X方向に対して直交しハウジング15の中心を通る方向(図3中の垂直方向であり、以下、Y方向とする)の発生振動加速度Gyを検出するようになっている。
【0038】
信号増幅部50は、上記加速度ピックアップ41、42によって検出された加速度信号(Gx、Gy)を増幅するものであり、増幅した信号を後述する信号処理部60に出力する。
【0039】
信号処理部60は、増幅された加速度信号(振動状態)を用いて回転軸11aの傾き方向および傾き量(傾き状態)を算出する算出部である。傾き方向および傾き量算出の詳細は後述する。
【0040】
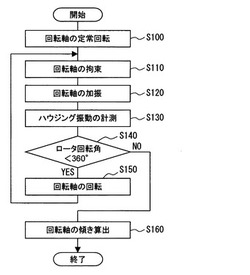
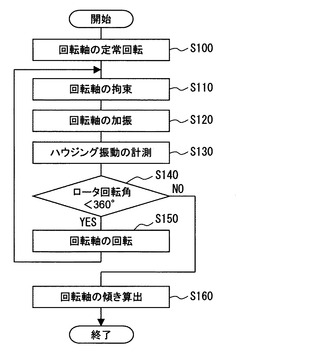
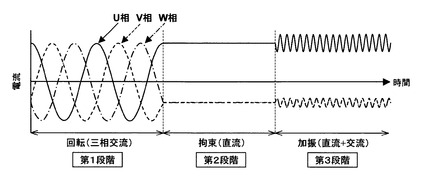
次に、軸傾き測定装置100による回転軸11aの傾き方向および傾き量の測定方法について、図4〜図11を用いて説明する。尚、図4は回転軸11aの傾き状態を測定する際の要領を示すフローチャート、図5はモータ部10Aに通電する際の電流特性を示すタイムチャート、図6〜図9は回転軸11aの傾き状態を測定している際の回転軸11aを示す模式図、図10は振動加速度のベクトル合成によって振動の方向を求める要領を示すグラフ、図11は通電する交流電流に対するハウジング15の振動加速度と変位とを示すタイムチャート、図12は振動加速度に対する傾き量を示すマップである。
【0041】
図4に示すように、まず、ステップS100で、モータ制御部30によって、電源供給部20からモータ部10Aに本来の交流電流を第1所定時間だけ通電して(図5の時間軸の第1段階)、モータ部10Aを作動させる。この時、通電コイルには図5の時間軸における第1段階に示すように、電流が各相(U相、V相、W相)に流れ、図6に示すように、回転軸11aは傾きの生ずる方向に安定しながら回転作動する。このステップS100は、本発明における安定化工程に対応する。
【0042】
次に、ステップS110で、モータ制御部30によって、電源供給部20からモータ部10Aに直流電流を第2所定時間だけ通電して(図5の時間軸の第2段階)、回転軸11aをその傾く方向に拘束させる。つまり、通電コイルに直流電流を流すことによって、回転が停止されると共に、回転軸11aの傾き方向(図1で説明した最小隙間部aのできる方向)に最大の吸引力(図1)が発生して、図7に示すように、ロータ11はステータ12(ハウジング15)に対して拘束されることになる。ここで、ロータ11が拘束されるステータ12側の位置を基準とした時に、ロータ11の回転時の周方向の角度をロータ回転角と定義する。この段階では、ロータ回転角は0度の位置となる。このステップS110は、本発明の拘束工程に対応する。
【0043】
次に、ステップS120で、モータ制御部30によって、電源供給部20からモータ部10Aに上記の直流電流を第3所定時間だけ流しつつ、この直流電流に交流電流を重畳させて(図5の時間軸の第3段階)、回転軸11aをその傾く方向に振動させる。つまり、通電コイルに対して直流電流に重畳させた交流電流を流すことによって、直流電流と言いつつもその電流値が変化し、吸引力を変化させることができるため、図8に示すように、回転軸11aは回転軸11aの傾き方向に振動することになる。このステップS120は、本発明の振動工程に対応する。
【0044】
次に、ステップS130で、加速度ピックアップ41、42によって、上記の回転軸11aの振動に伴うハウジング15の発生振動加速度Gx、Gyを検出する。加速度ピックアップ41、42は、回転軸11aの振動が例えば軸受け13a、ホルダ13を介してハウジング15に伝播することによって発生するハウジング15表面の加速度、つまりX方向の発生振動加速度Gx、およびY方向の発生振動加速度Gyを検出する。加速度ピックアップ41、42によって検出された発生振動加速度Gx、Gyの信号は、信号増幅器50に出力される。
【0045】
次に、ステップ140で、モータ制御部30によって、ロータ回転角が360度より小さいか否かを判定し、360度より小さいと判定するとステップS150に進む。
【0046】
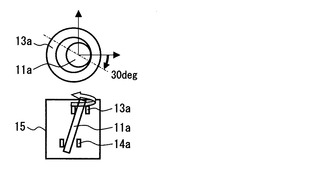
ステップS150では、ロータ11(回転軸11a)をモータ制御部30によって、図9に示すように、所定角度(ここでは30度としている)時計回りに回転させる(ずらす)。
【0047】
そして、ステップS110〜ステップS150を繰り返す。つまり、ロータ回転角を前の状態に対して所定角度だけずらした状態で、ロータ11を拘束、振動させて発生振動加速度Gx、Gyを検出し、ロータ11を1回転させるまで(ロータ回転角が360度となるまで)、その測定を繰り返す訳である。
【0048】
上記繰り返し測定の中で、ステップS140で、モータ制御部30によって、ロータ回転角が360度になったと判定すると、ステップS160に進み、信号処理部60によって回転軸11aの傾き方向、傾き量を算出する。
【0049】
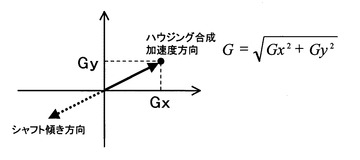
この算出に当たっては、まず図5の時間軸の第3段階において最大の吸引力が発生する瞬間、つまり電流最大時の二方向の発生振動加速度Gx、Gyを、図10に示すように、ベクトル合成し、ハウジング15表面における発生振動加速度Gを算出する。つまり、発生振動加速度Gを、以下の数式1によって算出する。
【0050】
【数1】

【0051】
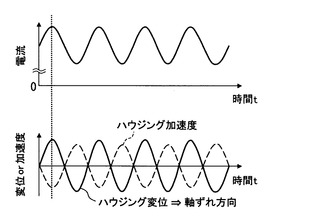
ここで、ハウジング15表面における発生振動加速度Gは、図11に示すように、通電する交流電流およびハウジング15表面に発生する変位に対して位相が180度ずれることから、数式1によって得られた発生振動加速度Gのベクトル方向に対して、180度反転した方向を振動による変位方向、即ち回転軸11aの傾き方向として算出する。
【0052】
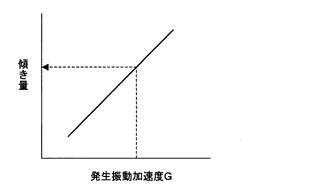
そして、回転軸11aの傾き量については、予め信号処理部60に記憶させたマップから算出する。マップは、図12に示すように、既知の傾き量に対する発生振動加速度Gの大きさを予め調べて関係付けたグラフであり、上記数式1によって得られた発生振動加速度Gに対応する値を傾き量として算出する。上記ステップS130、S160は、本発明の把握工程に対応する。
【0053】
以上のように、本軸傾き測定装置100によれば、モータ部10Aに対して通常、交流電流を与えるものに対して直流電流を与えることで、ロータ11を停止状態とさせると共に、ロータ11とステータ12との最小隙間部a間に最大の吸引力を働かせて、回転軸11aの傾き方向にロータ11を拘束することができる。
【0054】
そして、上記の直流電流に交流電流を重畳させることで、電流値を変化させて吸引力を変化させることができ、回転軸11aを傾き方向に振動させることができる。
【0055】
更に、回転軸11aの振動に伴う振動状態(発生振動加速度Gx、Gy)をハウジング15の表面で検出し、この振動状態に相関する回転軸11aの傾き状態(傾き方向、傾き量)を把握することができる。
【0056】
よって、回転軸11aがハウジング15によって覆われている場合であっても、回転軸11aの傾き状態を非破壊で測定することができる。
【0057】
また、ハウジング15表面において複数方向の振動状態を検出して、得られた振動状態のベクトルを合成し、この合成ベクトルから相関する回転軸11aの傾き状態を把握するようにしているので、より正確な回転軸11aの傾き状態を把握することができる。
【0058】
また、ハウジング15表面の振動状態を把握した後に、ロータ11の位置を所定角度ずつ回転させて、同様の測定を繰り返すようにしているので、回転軸11a、ロータ11、ステータ12のできばえのバラツキによる影響を取り除いて、回転軸11aの傾き状態を把握することができる。
【0059】
また、回転軸11aを拘束させる前に、通常の回転作動をさせるようにしているので、拘束する前の回転軸11aの位置を安定化させて、更に、回転軸11aの拘束、振動を安定化させることができ、算出される回転軸11aの傾き状態の信頼性を向上させることができる。
【0060】
(その他の実施形態)
上記第1実施形態では、検出部としてハウジング15表面における発生振動加速度を検出する加速度ピックアップ41、42を使用したが、これに限らず、ハウジング15表面における振動の変位を検出する変位ピックアップ、あるいは振動の速度を検出する速度ピックアップを用いるようにしても良い。
【0061】
変位ピックアップ、速度ピックアップを用いる場合は、通電される交流電流に対して、振動の変位、振動の速度は同位相となることから、振動の方向、即ち回転軸11aの傾き方向は、数式1によって算出されるベクトルの方向と同一の方向として算出できる。
【0062】
そして、回転軸11aの傾き量の算出に当たっては、図12で説明したマップに対して、予め、振動の変位、あるいは振動の速度に対する傾き量の関係をマップとして準備し、信号処理部60に記憶させておくことで算出対応可能となる。
【0063】
また、検出部としての加速度ピックアップ41、42(2つ)をハウジング15表面の外周部で周方向に90度離れた位置に設けるようにしたが、一つで複数方向の加速度を検出できるピックアップを用いても良い。更に、ピックアップの数を増やして(例えば、3つ、4つ等)設定するようにしても良く、これにより、算出される傾き状態の信頼性を向上させることができる。
【0064】
また、回転軸11aの傾き状態として、傾き方向と傾き量を算出するものとして説明したが、必要に応じて、いずれか一方を算出するものとしても良い。
【0065】
また、図4で説明した、ステップS140の判定の後に、ロータ回転角を所定角度ずつずらして、ステップS110〜ステップS150を繰り返すようにしたが、ステップS140、S150を廃止して、ステップS110〜ステップS130を1回ずつのみ行うものとしても良い。
【0066】
また、ステップS100によるモータ部10Aの安定化作動は、必要に応じて廃止しても良い。
【0067】
また、ステータ12の通電コイルに通電する交流電流として、正弦波を用いたが、その他、三角波、のこぎり波、矩形波等を用いるようにしても良い。三角波、のこぎり波、矩形波においては急峻な電流値の変化を伴うため、回転軸11aを振動させる際により大きな振動振幅が得られ、回転軸11aの傾き状態を算出する際の信頼性を向上させることができる。
【図面の簡単な説明】
【0068】
【図1】電動圧縮機を示す断面図である。
【図2】軸傾き測定装置を示す全体構成図である。
【図3】電動圧縮機のハウジングに設けられる加速度ピックアップを示す平面図である。
【図4】回転軸の傾き状態を測定する際の要領を示すフローチャートである。
【図5】モータ部に通電する際の電流特性を示すタイムチャートである。
【図6】回転軸の傾き状態を測定している際の回転軸を示す第1模式図である。
【図7】回転軸の傾き状態を測定している際の回転軸を示す第2模式図である。
【図8】回転軸の傾き状態を測定している際の回転軸を示す第3模式図である。
【図9】回転軸の傾き状態を測定している際の回転軸を示す第4模式図である。
【図10】振動加速度のベクトル合成によって振動の方向を求める要領を示すグラフである。
【図11】通電する交流電流に対するハウジングの振動加速度と変位とを示すタイムチャートである。
【図12】振動加速度に対する傾き量を示すマップである。
【符号の説明】
【0069】
11 ロータ(回転子)
11a 回転軸
12 ステータ(固定子)
15 ハウジング
30 モータ制御部(電流制御部)
41、42 加速度ピックアップ(検出部)
60 信号処理部(算出部)
【技術分野】
【0001】
本発明は、例えばモータ等の回転機械の回転軸の傾きを非破壊で測定する傾き測定方法およびその装置に関するものである。
【背景技術】
【0002】
従来の回転軸傾き測定装置として、例えば特許文献1に示されるように、対象となる回転軸の周方向および軸方向の複数箇所の表面近傍に非接触式のレーザ変位センサを設けて、このセンサによって得られる振動量(振れ量)から、回転軸の傾き量および傾き方向を測定するものが知られている。
【特許文献1】特開2001−153757号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1においては、レーザを回転軸に直接当てるようにしているので、回転機械のように回転軸が例えばハウジング等で覆われている場合には、軸の傾きおよび傾き方向を測定することができない。
【0004】
本発明の目的は、上記問題に鑑み、回転軸がハウジング等で覆われている場合であっても、回転軸の傾きを非破壊で測定可能とする回転機械の軸傾き測定方法およびその装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明は上記目的を達成するために、以下の技術的手段を採用する。
【0006】
請求項1に記載の発明では、鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
回転子(11)あるいは固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、回転軸(11a)が回転される回転機械の軸傾き測定方法であって、
通電コイルに直流電流を与えて、回転軸(11a)をこの回転軸(11a)の傾きの生ずる方向に拘束する拘束工程(S110)と、
拘束工程(S110)の後に、直流電流に交流電流を重畳して、回転軸(11a)を傾きの生ずる方向に振動させる振動工程(S120)と、
振動工程(S120)時にハウジング(15)に伝播される回転軸(11a)の振動状態から、その振動状態に相関する回転軸(11a)の傾き状態を把握する把握工程(S130、S160)とを備えることを特徴としている。
【0007】
回転軸(11a)が鉛直方向に向けられる回転機械(10)において、回転軸(11a)は、製造上の各種バラツキによって微小な傾きを持っている。この回転軸(11a)の傾きにより、回転子(11)と固定子(12)との間には、周方向において、本来の隙間よりも狭くなる最小隙間部(a)が形成される形となる。
【0008】
拘束工程(S110)において通常、交流電流を与えるものに対して直流電流を与えることで、回転子(11)は、停止状態となると共に、回転子(11)と固定子(12)との最小隙間部(a)間に最大の吸引力が働き、傾きの生ずる方向に拘束される。
【0009】
そして、振動工程(S120)において、上記の直流電流に交流電流を重畳させることで、電流値を変化させて吸引力を変化させることができるので、回転軸(11a)を傾きの生ずる方向に振動させることができる。
【0010】
更に、把握工程(S130、S160)において、この振動に伴う振動状態をハウジング(15)の表面で検出することで、この振動状態に相関する回転軸(11a)の傾き状態を把握することができる。
【0011】
このように、請求項1に記載の発明は、回転軸(11a)がハウジング(15)によって覆われている場合であっても、回転軸(11a)の傾きを非破壊で測定することができる。
【0012】
請求項2に記載の発明では、振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴としている。
【0013】
これにより、振動状態を具体性および実現性をもって把握することができる。
【0014】
請求項3に記載の発明では、傾き状態は、回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴としている。
【0015】
これにより、傾き状態を具体性および現実性をもって把握することができる。
【0016】
請求項4に記載の発明では、把握工程(S130、S160)において、ハウジング(15)に伝播される回転軸(11a)の振動状態を複数方向に把握し、
複数方向の振動状態からベクトルを合成し、この合成ベクトルから相関する回転軸(11a)の傾き状態を把握することを特徴としている。
【0017】
これにより、より正確な回転軸(11a)の傾き量を把握し、かつ傾き方向を把握することができる。
【0018】
請求項5に記載の発明では、把握工程(S130、S160)の後に、回転軸(11a)を所定角度回転させて、更に、拘束工程(S110)、振動工程(S120)、把握工程(S130、S160)を繰り返すことを特徴としている。
【0019】
これにより、回転軸(11a)、回転子(11)、固定子(12)のできばえのバラツキによる影響を取り除いて、より正確な回転軸(11a)の傾き状態を把握することができる。
【0020】
請求項6に記載の発明では、拘束工程(S110)の前に、通電コイルに交流電流を与えて、回転軸(11a)を通常回転させて、回転軸(11a)の位置を安定化させる安定化工程(S100)を備えることを特徴としている。
【0021】
これにより、拘束する前の回転軸(11a)の位置を安定化させて、拘束工程(S110)、振動工程(S120)を安定化させることができ、把握工程(S130、S160)で得られる傾き状態の信頼性を向上させることができる。
【0022】
請求項7に記載の発明では、振動工程(S120)において重畳する交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つを用いることを特徴としている。
【0023】
これにより、交流電流として使用が容易なものを選択できる。そして、三角波、のこぎり波、矩形波においては、急峻な電流値の変化を伴うため、振動工程(S120)でのより大きな振動振幅が得られ、把握工程(S130、S160)での信頼性を向上させることができる。
【0024】
請求項8〜請求項14に記載の発明は、回転機械の軸傾き測定装置に関するものであり、その技術的意義は、上記請求項1〜請求項7に記載の回転機械の軸傾き測定方法と本質的に同じである。
【0025】
尚、上記各手段の括弧内の符号は、後述する実施形態記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0026】
(第1実施形態)
本発明の第1実施形態における軸傾き測定装置100について、以下、図1〜図11を用いて説明する。まず、図1〜図3を用いて、電動圧縮機10、および軸傾き測定装置100の構成について説明する。尚、図1は電動圧縮機10を示す断面図、図2は軸傾き測定装置100を示す全体構成図、図3は電動圧縮機10のハウジング15に設けられる加速度ピックアップ41、42を示す平面図である。
【0027】
まず、本軸傾き測定装置100による軸傾きの測定対象となる電動圧縮機10について説明する。
【0028】
図1に示すように、電動圧縮機10は、例えば密閉型の回転機械であり、ハウジング15内にモータ部10Aと、モータ部10Aの回転軸11aのいずれか一方の先端部に接続されて、このモータ部10Aの駆動力によって作動される図示しない圧縮機部とが収容されて形成されている。
【0029】
モータ部10Aは、例えば三相交流モータであり、永久磁石から成る筒状体に、回転軸11aが中心軸線に沿って挿通固定されたロータ(回転子)11を有している。ロータ11は、円筒状のハウジング15内に収容されて、回転軸11aの長手方向が鉛直方向となるように配設されている。ハウジング15の内周面には、中心部に軸受け13a、14aが設けられたホルダ13、14が回転軸11aの長手方向に離間して固定されている。そして、ロータ11は、回転軸11aの長手方向の両端部側が軸受け13a、14aに挿通されることで回転可能に支持されている。回転軸11aは、ロータ11としてハウジング15内に収容されることから、外部に露出される回転部位がまったく無いものとなっている。
【0030】
また、ハウジング15内において、ロータ11(筒状体)の外周側には、リング状の鉄心に通電コイル(図示省略)が設けられたステータ(固定子)12が配設されており、このステータ12はハウジング15の内周面に固定されている。通電コイルには、U相、V相、W相の3つのコイルが形成されている。尚、通電コイルは、ステータ12を永久磁石として、鉄心を備えるロータ11に設けられるものとしても良い。
【0031】
モータ部10Aにおいては、軸受け13a、14aの中心位置は、設計上、同心位置となるように設定されているが、実際には製造上の各種バラツキによって、位置ズレが生じている。また、回転軸11aと軸受け13a、14aとの間にはクリアランスが存在し、上記位置ズレとクリアランスとによって、回転軸11aは、この回転軸11aの周方向のいずれかの方向(以下、傾き方向と呼ぶ)に、径方向への微小な傾き量をもって、傾いた状態で回転することになる。そして、この傾きによって、ロータ11とステータ12との間においては、両者11、12間の隙間が最小となる最小隙間部aが存在することになる。
【0032】
上記回転軸11aの傾き方向は、例えば図3で示した電動圧縮機10の平面図において、水平方向に引いた中心線のハウジング15右側の方向を0度として、反時計回りに、垂直方向に引いた中心線のハウジング15上側の方向を90度、水平方向に引いた中心線のハウジング15左側の方向を180度、垂直方向に引いた中心線のハウジング15下側の方向を270度というように、回転軸11aの周方向の角度によって表すことができる。また、傾き量は、例えば軸受け13a、14a間における回転軸11aの径方向における中心位置のズレ量として表すことができる。
【0033】
図2に示すように、軸傾き測定装置100は、上記電動圧縮機10の回転軸11aの傾き状態(傾き方向、傾き量)を測定する装置であり、電力供給部20、モータ制御部30、加速度ピックアップ41、42、信号増幅部50、信号処理部60を備えている。
【0034】
電力供給部20は、モータ部10Aの通電コイルへの交流電流、あるいは直流電流を供給する機器であり、後述するモータ制御部30に接続されている。ここでは、交流電流は通常の正弦波を用いている。
【0035】
モータ制御部30は、電力供給部20からの交流電流、あるいは直流電流を、電動圧縮機10のモータ部10A(通電コイル)に対して異なるタイミングで供給可能とする電流制御部である。
【0036】
加速度ピックアップ41、42は、モータ部10Aの作動時に回転軸11aの傾きに伴って発生し、ハウジング15表面に伝播される振動状態(ここでは振動の加速度としている)を検出する検出部であり、ハウジング15のホルダ13が設けられた外周部で、図3に示すように、ハウジング15の周方向に90度離れた位置に固定されている。
【0037】
図3において、加速度ピックアップ41は、この加速度ピックアップ41とハウジング15の中心とを通る方向(図3中の水平方向であり、以下、X方向とする)の発生振動加速度Gxを検出するようになっており、また、加速度ピックアップ42は、X方向に対して直交しハウジング15の中心を通る方向(図3中の垂直方向であり、以下、Y方向とする)の発生振動加速度Gyを検出するようになっている。
【0038】
信号増幅部50は、上記加速度ピックアップ41、42によって検出された加速度信号(Gx、Gy)を増幅するものであり、増幅した信号を後述する信号処理部60に出力する。
【0039】
信号処理部60は、増幅された加速度信号(振動状態)を用いて回転軸11aの傾き方向および傾き量(傾き状態)を算出する算出部である。傾き方向および傾き量算出の詳細は後述する。
【0040】
次に、軸傾き測定装置100による回転軸11aの傾き方向および傾き量の測定方法について、図4〜図11を用いて説明する。尚、図4は回転軸11aの傾き状態を測定する際の要領を示すフローチャート、図5はモータ部10Aに通電する際の電流特性を示すタイムチャート、図6〜図9は回転軸11aの傾き状態を測定している際の回転軸11aを示す模式図、図10は振動加速度のベクトル合成によって振動の方向を求める要領を示すグラフ、図11は通電する交流電流に対するハウジング15の振動加速度と変位とを示すタイムチャート、図12は振動加速度に対する傾き量を示すマップである。
【0041】
図4に示すように、まず、ステップS100で、モータ制御部30によって、電源供給部20からモータ部10Aに本来の交流電流を第1所定時間だけ通電して(図5の時間軸の第1段階)、モータ部10Aを作動させる。この時、通電コイルには図5の時間軸における第1段階に示すように、電流が各相(U相、V相、W相)に流れ、図6に示すように、回転軸11aは傾きの生ずる方向に安定しながら回転作動する。このステップS100は、本発明における安定化工程に対応する。
【0042】
次に、ステップS110で、モータ制御部30によって、電源供給部20からモータ部10Aに直流電流を第2所定時間だけ通電して(図5の時間軸の第2段階)、回転軸11aをその傾く方向に拘束させる。つまり、通電コイルに直流電流を流すことによって、回転が停止されると共に、回転軸11aの傾き方向(図1で説明した最小隙間部aのできる方向)に最大の吸引力(図1)が発生して、図7に示すように、ロータ11はステータ12(ハウジング15)に対して拘束されることになる。ここで、ロータ11が拘束されるステータ12側の位置を基準とした時に、ロータ11の回転時の周方向の角度をロータ回転角と定義する。この段階では、ロータ回転角は0度の位置となる。このステップS110は、本発明の拘束工程に対応する。
【0043】
次に、ステップS120で、モータ制御部30によって、電源供給部20からモータ部10Aに上記の直流電流を第3所定時間だけ流しつつ、この直流電流に交流電流を重畳させて(図5の時間軸の第3段階)、回転軸11aをその傾く方向に振動させる。つまり、通電コイルに対して直流電流に重畳させた交流電流を流すことによって、直流電流と言いつつもその電流値が変化し、吸引力を変化させることができるため、図8に示すように、回転軸11aは回転軸11aの傾き方向に振動することになる。このステップS120は、本発明の振動工程に対応する。
【0044】
次に、ステップS130で、加速度ピックアップ41、42によって、上記の回転軸11aの振動に伴うハウジング15の発生振動加速度Gx、Gyを検出する。加速度ピックアップ41、42は、回転軸11aの振動が例えば軸受け13a、ホルダ13を介してハウジング15に伝播することによって発生するハウジング15表面の加速度、つまりX方向の発生振動加速度Gx、およびY方向の発生振動加速度Gyを検出する。加速度ピックアップ41、42によって検出された発生振動加速度Gx、Gyの信号は、信号増幅器50に出力される。
【0045】
次に、ステップ140で、モータ制御部30によって、ロータ回転角が360度より小さいか否かを判定し、360度より小さいと判定するとステップS150に進む。
【0046】
ステップS150では、ロータ11(回転軸11a)をモータ制御部30によって、図9に示すように、所定角度(ここでは30度としている)時計回りに回転させる(ずらす)。
【0047】
そして、ステップS110〜ステップS150を繰り返す。つまり、ロータ回転角を前の状態に対して所定角度だけずらした状態で、ロータ11を拘束、振動させて発生振動加速度Gx、Gyを検出し、ロータ11を1回転させるまで(ロータ回転角が360度となるまで)、その測定を繰り返す訳である。
【0048】
上記繰り返し測定の中で、ステップS140で、モータ制御部30によって、ロータ回転角が360度になったと判定すると、ステップS160に進み、信号処理部60によって回転軸11aの傾き方向、傾き量を算出する。
【0049】
この算出に当たっては、まず図5の時間軸の第3段階において最大の吸引力が発生する瞬間、つまり電流最大時の二方向の発生振動加速度Gx、Gyを、図10に示すように、ベクトル合成し、ハウジング15表面における発生振動加速度Gを算出する。つまり、発生振動加速度Gを、以下の数式1によって算出する。
【0050】
【数1】
【0051】
ここで、ハウジング15表面における発生振動加速度Gは、図11に示すように、通電する交流電流およびハウジング15表面に発生する変位に対して位相が180度ずれることから、数式1によって得られた発生振動加速度Gのベクトル方向に対して、180度反転した方向を振動による変位方向、即ち回転軸11aの傾き方向として算出する。
【0052】
そして、回転軸11aの傾き量については、予め信号処理部60に記憶させたマップから算出する。マップは、図12に示すように、既知の傾き量に対する発生振動加速度Gの大きさを予め調べて関係付けたグラフであり、上記数式1によって得られた発生振動加速度Gに対応する値を傾き量として算出する。上記ステップS130、S160は、本発明の把握工程に対応する。
【0053】
以上のように、本軸傾き測定装置100によれば、モータ部10Aに対して通常、交流電流を与えるものに対して直流電流を与えることで、ロータ11を停止状態とさせると共に、ロータ11とステータ12との最小隙間部a間に最大の吸引力を働かせて、回転軸11aの傾き方向にロータ11を拘束することができる。
【0054】
そして、上記の直流電流に交流電流を重畳させることで、電流値を変化させて吸引力を変化させることができ、回転軸11aを傾き方向に振動させることができる。
【0055】
更に、回転軸11aの振動に伴う振動状態(発生振動加速度Gx、Gy)をハウジング15の表面で検出し、この振動状態に相関する回転軸11aの傾き状態(傾き方向、傾き量)を把握することができる。
【0056】
よって、回転軸11aがハウジング15によって覆われている場合であっても、回転軸11aの傾き状態を非破壊で測定することができる。
【0057】
また、ハウジング15表面において複数方向の振動状態を検出して、得られた振動状態のベクトルを合成し、この合成ベクトルから相関する回転軸11aの傾き状態を把握するようにしているので、より正確な回転軸11aの傾き状態を把握することができる。
【0058】
また、ハウジング15表面の振動状態を把握した後に、ロータ11の位置を所定角度ずつ回転させて、同様の測定を繰り返すようにしているので、回転軸11a、ロータ11、ステータ12のできばえのバラツキによる影響を取り除いて、回転軸11aの傾き状態を把握することができる。
【0059】
また、回転軸11aを拘束させる前に、通常の回転作動をさせるようにしているので、拘束する前の回転軸11aの位置を安定化させて、更に、回転軸11aの拘束、振動を安定化させることができ、算出される回転軸11aの傾き状態の信頼性を向上させることができる。
【0060】
(その他の実施形態)
上記第1実施形態では、検出部としてハウジング15表面における発生振動加速度を検出する加速度ピックアップ41、42を使用したが、これに限らず、ハウジング15表面における振動の変位を検出する変位ピックアップ、あるいは振動の速度を検出する速度ピックアップを用いるようにしても良い。
【0061】
変位ピックアップ、速度ピックアップを用いる場合は、通電される交流電流に対して、振動の変位、振動の速度は同位相となることから、振動の方向、即ち回転軸11aの傾き方向は、数式1によって算出されるベクトルの方向と同一の方向として算出できる。
【0062】
そして、回転軸11aの傾き量の算出に当たっては、図12で説明したマップに対して、予め、振動の変位、あるいは振動の速度に対する傾き量の関係をマップとして準備し、信号処理部60に記憶させておくことで算出対応可能となる。
【0063】
また、検出部としての加速度ピックアップ41、42(2つ)をハウジング15表面の外周部で周方向に90度離れた位置に設けるようにしたが、一つで複数方向の加速度を検出できるピックアップを用いても良い。更に、ピックアップの数を増やして(例えば、3つ、4つ等)設定するようにしても良く、これにより、算出される傾き状態の信頼性を向上させることができる。
【0064】
また、回転軸11aの傾き状態として、傾き方向と傾き量を算出するものとして説明したが、必要に応じて、いずれか一方を算出するものとしても良い。
【0065】
また、図4で説明した、ステップS140の判定の後に、ロータ回転角を所定角度ずつずらして、ステップS110〜ステップS150を繰り返すようにしたが、ステップS140、S150を廃止して、ステップS110〜ステップS130を1回ずつのみ行うものとしても良い。
【0066】
また、ステップS100によるモータ部10Aの安定化作動は、必要に応じて廃止しても良い。
【0067】
また、ステータ12の通電コイルに通電する交流電流として、正弦波を用いたが、その他、三角波、のこぎり波、矩形波等を用いるようにしても良い。三角波、のこぎり波、矩形波においては急峻な電流値の変化を伴うため、回転軸11aを振動させる際により大きな振動振幅が得られ、回転軸11aの傾き状態を算出する際の信頼性を向上させることができる。
【図面の簡単な説明】
【0068】
【図1】電動圧縮機を示す断面図である。
【図2】軸傾き測定装置を示す全体構成図である。
【図3】電動圧縮機のハウジングに設けられる加速度ピックアップを示す平面図である。
【図4】回転軸の傾き状態を測定する際の要領を示すフローチャートである。
【図5】モータ部に通電する際の電流特性を示すタイムチャートである。
【図6】回転軸の傾き状態を測定している際の回転軸を示す第1模式図である。
【図7】回転軸の傾き状態を測定している際の回転軸を示す第2模式図である。
【図8】回転軸の傾き状態を測定している際の回転軸を示す第3模式図である。
【図9】回転軸の傾き状態を測定している際の回転軸を示す第4模式図である。
【図10】振動加速度のベクトル合成によって振動の方向を求める要領を示すグラフである。
【図11】通電する交流電流に対するハウジングの振動加速度と変位とを示すタイムチャートである。
【図12】振動加速度に対する傾き量を示すマップである。
【符号の説明】
【0069】
11 ロータ(回転子)
11a 回転軸
12 ステータ(固定子)
15 ハウジング
30 モータ制御部(電流制御部)
41、42 加速度ピックアップ(検出部)
60 信号処理部(算出部)
【特許請求の範囲】
【請求項1】
鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および前記回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
前記回転子(11)あるいは前記固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、前記回転軸(11a)が回転される回転機械の軸傾き測定方法であって、
前記通電コイルに直流電流を与えて、前記回転軸(11a)を前記回転軸(11a)の傾きの生ずる方向に拘束する拘束工程(S110)と、
前記拘束工程(S110)の後に、前記直流電流に交流電流を重畳して、前記回転軸(11a)を前記傾きの生ずる方向に振動させる振動工程(S120)と、
前記振動工程(S120)時に前記ハウジング(15)に伝播される前記回転軸(11a)の振動状態から、その振動状態に相関する前記回転軸(11a)の傾き状態を把握する把握工程(S130、S160)とを備えることを特徴とする回転機械の軸傾き測定方法。
【請求項2】
前記振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴とする請求項1に記載の回転機械の軸傾き測定方法。
【請求項3】
前記傾き状態は、前記回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴とする請求項1または請求項2に記載の回転機械の軸傾き測定方法。
【請求項4】
前記把握工程(S130、S160)において、前記ハウジング(15)に伝播される前記回転軸(11a)の前記振動状態を複数方向に把握し、
複数方向の前記振動状態からベクトルを合成し、この合成ベクトルから相関する前記回転軸(11a)の傾き状態を把握することを特徴とする請求項1〜請求項3のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項5】
前記把握工程(S130、S160)の後に、前記回転軸(11a)を所定角度回転させて、更に、前記拘束工程(S110)、前記振動工程(S120)、前記把握工程(S130、S160)を繰り返すことを特徴とする請求項1〜請求項4のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項6】
前記拘束工程(S110)の前に、前記通電コイルに交流電流を与えて、前記回転軸(11a)を通常回転させて、前記回転軸(11a)の位置を安定化させる安定化工程(S100)を備えることを特徴とする請求項1〜請求項5のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項7】
前記振動工程(S120)において重畳する前記交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つを用いることを特徴とする請求項1〜請求項6のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項8】
鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および前記回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
前記回転子(11)あるいは前記固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、前記回転軸(11a)が回転される回転機械の軸傾き測定装置であって、
前記通電コイルに直流電流を与えて、前記回転軸(11a)を前記回転軸(11a)の傾きの生ずる方向に拘束すると共に、前記直流電流に交流電流を重畳して、前記回転軸(11a)を前記傾きの生ずる方向に振動させる電流制御部(30)と、
前記ハウジング(15)表面の所定部位に設けられて、前記電流制御部(30)によって振動される前記回転軸(11a)から前記ハウジング(15)へ伝播される振動状態を検出する検出部(41、42)と、
前記検出部(41、42)によって得られた前記振動状態から、その振動状態に相関する前記回転軸(11a)の傾き状態を算出する算出手段(60)とを備えることを特徴とする回転機械の軸傾き測定装置。
【請求項9】
前記振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴とする請求項8に記載の回転機械の軸傾き測定装置。
【請求項10】
前記傾き状態は、前記回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴とする請求項8または請求項9に記載の回転機械の軸傾き測定装置。
【請求項11】
前記検出部(41、42)は、前記ハウジング(15)に伝播される前記回転軸(11a)の前記振動状態を複数方向に把握し、
前記算出部(60)は、複数方向の前記振動状態からベクトルを合成し、この合成ベクトルから相関する前記回転軸(11a)の傾き状態を算出することを特徴とする請求項8〜請求項10のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項12】
前記検出部(41、42)は、前記電流制御部(30)によって所定角度ずつ回転される前記回転軸(11a)の複数の回転方向位置における前記振動状態を検出し、
前記算出部(60)は、前記検出部(41、42)によって得られた複数方向の前記振動状態から、前記傾き状態を算出することを特徴とする請求項8〜請求項11のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項13】
前記電流制御部(30)は、前記回転軸(11a)を拘束する前に、前記通電コイルに交流電流を与えて、前記回転軸(11a)を通常回転させて、前記回転軸(11a)の位置を安定化させることを特徴とする請求項8〜請求項12のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項14】
前記電流制御部(30)によって前記直流電流に重畳される前記交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つであることを特徴とする請求項8〜請求項13のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項1】
鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および前記回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
前記回転子(11)あるいは前記固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、前記回転軸(11a)が回転される回転機械の軸傾き測定方法であって、
前記通電コイルに直流電流を与えて、前記回転軸(11a)を前記回転軸(11a)の傾きの生ずる方向に拘束する拘束工程(S110)と、
前記拘束工程(S110)の後に、前記直流電流に交流電流を重畳して、前記回転軸(11a)を前記傾きの生ずる方向に振動させる振動工程(S120)と、
前記振動工程(S120)時に前記ハウジング(15)に伝播される前記回転軸(11a)の振動状態から、その振動状態に相関する前記回転軸(11a)の傾き状態を把握する把握工程(S130、S160)とを備えることを特徴とする回転機械の軸傾き測定方法。
【請求項2】
前記振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴とする請求項1に記載の回転機械の軸傾き測定方法。
【請求項3】
前記傾き状態は、前記回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴とする請求項1または請求項2に記載の回転機械の軸傾き測定方法。
【請求項4】
前記把握工程(S130、S160)において、前記ハウジング(15)に伝播される前記回転軸(11a)の前記振動状態を複数方向に把握し、
複数方向の前記振動状態からベクトルを合成し、この合成ベクトルから相関する前記回転軸(11a)の傾き状態を把握することを特徴とする請求項1〜請求項3のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項5】
前記把握工程(S130、S160)の後に、前記回転軸(11a)を所定角度回転させて、更に、前記拘束工程(S110)、前記振動工程(S120)、前記把握工程(S130、S160)を繰り返すことを特徴とする請求項1〜請求項4のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項6】
前記拘束工程(S110)の前に、前記通電コイルに交流電流を与えて、前記回転軸(11a)を通常回転させて、前記回転軸(11a)の位置を安定化させる安定化工程(S100)を備えることを特徴とする請求項1〜請求項5のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項7】
前記振動工程(S120)において重畳する前記交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つを用いることを特徴とする請求項1〜請求項6のいずれか1つに記載の回転機械の軸傾き測定方法。
【請求項8】
鉛直方向に向けられる回転軸(11a)を備える回転子(11)、および前記回転子(11)の外周側に設けられる固定子(12)がハウジング(15)内に収容されて、
前記回転子(11)あるいは前記固定子(12)のいずれかに設けられた交流用の通電コイルに通電されることで、前記回転軸(11a)が回転される回転機械の軸傾き測定装置であって、
前記通電コイルに直流電流を与えて、前記回転軸(11a)を前記回転軸(11a)の傾きの生ずる方向に拘束すると共に、前記直流電流に交流電流を重畳して、前記回転軸(11a)を前記傾きの生ずる方向に振動させる電流制御部(30)と、
前記ハウジング(15)表面の所定部位に設けられて、前記電流制御部(30)によって振動される前記回転軸(11a)から前記ハウジング(15)へ伝播される振動状態を検出する検出部(41、42)と、
前記検出部(41、42)によって得られた前記振動状態から、その振動状態に相関する前記回転軸(11a)の傾き状態を算出する算出手段(60)とを備えることを特徴とする回転機械の軸傾き測定装置。
【請求項9】
前記振動状態を表す状態量は、振動の変位、振動の速度、振動の加速度のいずれか1つであることを特徴とする請求項8に記載の回転機械の軸傾き測定装置。
【請求項10】
前記傾き状態は、前記回転軸(11a)の傾き量、傾き方向の少なくとも1つであることを特徴とする請求項8または請求項9に記載の回転機械の軸傾き測定装置。
【請求項11】
前記検出部(41、42)は、前記ハウジング(15)に伝播される前記回転軸(11a)の前記振動状態を複数方向に把握し、
前記算出部(60)は、複数方向の前記振動状態からベクトルを合成し、この合成ベクトルから相関する前記回転軸(11a)の傾き状態を算出することを特徴とする請求項8〜請求項10のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項12】
前記検出部(41、42)は、前記電流制御部(30)によって所定角度ずつ回転される前記回転軸(11a)の複数の回転方向位置における前記振動状態を検出し、
前記算出部(60)は、前記検出部(41、42)によって得られた複数方向の前記振動状態から、前記傾き状態を算出することを特徴とする請求項8〜請求項11のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項13】
前記電流制御部(30)は、前記回転軸(11a)を拘束する前に、前記通電コイルに交流電流を与えて、前記回転軸(11a)を通常回転させて、前記回転軸(11a)の位置を安定化させることを特徴とする請求項8〜請求項12のいずれか1つに記載の回転機械の軸傾き測定装置。
【請求項14】
前記電流制御部(30)によって前記直流電流に重畳される前記交流電流は、正弦波、三角波、のこぎり波、矩形波のいずれか1つであることを特徴とする請求項8〜請求項13のいずれか1つに記載の回転機械の軸傾き測定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−103527(P2009−103527A)
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2007−274293(P2007−274293)
【出願日】平成19年10月22日(2007.10.22)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成19年10月22日(2007.10.22)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]