
回転機械状態監視装置、回転機械状態監視方法及び回転機械状態監視プログラム
【課題】回転機械により発生する振動に、インバータのキャリア周波数成分が混在した場合であっても、振動状態を正確に監視する。
【解決手段】インバータにより駆動される回転機械2の振動の計測値を記憶する計測値記憶部323と、計測値を解析することにより、振動波形を求める振動解析部313aと、振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部314bと、フィルタ処理を行った振動波形に基づいて、代表値である振動レベルを判定する振動レベル判定部313cと、を有する。
【解決手段】インバータにより駆動される回転機械2の振動の計測値を記憶する計測値記憶部323と、計測値を解析することにより、振動波形を求める振動解析部313aと、振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部314bと、フィルタ処理を行った振動波形に基づいて、代表値である振動レベルを判定する振動レベル判定部313cと、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、回転機械の振動を監視するための回転機械状態監視装置、回転機械状態監視方法及び回転機械状態監視プログラムに関する。
【背景技術】
【0002】
[インバータ制御について]
ファン、ポンプなど、電動機を駆動源として回転駆動される回転機械は、広く一般に普及している。かかる回転機械においては、電動機をインバータ(Inverter)で駆動するケースが増えてきている。インバータは、直流電力から交流電力を電気的に生成する電源回路を持つ電力変換装置である。このインバータを用いると、商用電源により駆動する場合に比べて、電圧・周波数を変更したり、一定に保つことが容易に実現できる。このため、インバータを回転機械に組み込むことで、必要な回転数への制御が容易となり、高い省エネルギー効果が実現できる。
【0003】
インバータの出力制御の方式としては、たとえば、PAM(Pulse Amplitude Modulation:パルス振幅変調)方式とPWM(Pulse Width Modulation:パルス幅変調)方式がある。PAM方式では、パルス振幅により電圧が決定される。PWM方式では、パルス幅により電圧が決定される。PWM方式は、周波数変化に対する電圧変化の応答遅れが少なく、高応答特性が得られるため、広く用いられている。ただし、PWM方式において、パルス幅を決定するキャリア周波数成分(数kHz〜約20kHz)は、振動の発生原因となる。
【0004】
[振動法による回転機械状態監視について]
[概要]
ところで、近年では、ファン、ポンプなど回転機械の設備の延命化を目的として、振動法による状態監視を行うケースが増えてきている。振動法による状態監視とは、回転機械の本体と、その駆動源である電動機などの振動を計測し、それぞれの機械的異常の有無を、計測により得られた振動データから診断する手法である。
【0005】
より具体的には、たとえば、以下のような現象を監視して、異常の有無を診断することができる。
(1) 機器の異共振による異常振動
(2) 消耗部品(軸受、歯車など)の損傷等について、その固有振動数に応じた周波数成分毎の振動レベルの推移
【0006】
[振動レベル]
振動の大きさ(振動レベル)を評価する物理量には、振動変位、振動速度、振動加速度の3種類がある。これら3種類のパラメータは、概ね以下のような周波数帯域の振動に対応すると考えることができる。
・振動変位 : 0〜 500[Hz]
・振動速度 : 0〜 1000[Hz]
・振動加速度 :1000〜20000[Hz]
このため、振動レベルを評価する値として、一般的には、低周波の場合は変位計や速度計の値、高周波の場合は加速度計の値が用いられている。
【0007】
なお、振動加速度の監視周波数帯域については、従来は、1000〜10000[Hz]であった。しかし、近年では、監視周波数帯域は、1000〜20000[Hz]に広がってきている。これは、機械共振周波数のより高い次数まで検知し、きめ細かい監視を行うためである。
【0008】
振動レベルは、周波数毎のレベルを指す場合と、大まかに定められた帯域すべてを含んだ波形のレベルを指す場合がある。前者は、FFT解析で得られる周波数成分を表現したパワースペクトルレベルを指す。後者は、実効値(RMS値)、オーバーオール値(OA値)などを指す。実効値の演算式の一例を、図14に示す。
【0009】
[振動解析方法]
振動の解析方法としては、たとえば、上述の実効値、OA値を常に監視することにより、機械全体の状態変化を的確に把握する方法がある。また、あらかじめ軸受や歯車の共振周波数を求めておき、その周波数成分のパワースペクトルレベルを常に監視することにより、これら機器の損傷を把握する方法もある。つまり、実効値、OA値、パワースペクトルレベル等は、それぞれ目的が異なるが、回転機械の異常発生の有無を把握するために、重要なパラメータである。
【0010】
[警報値について]
警報値とは、回転機械の監視システムが、機器の損傷程度を判定するために設けられる値である。これは、監視システムが、機器の状態監視間隔、運用停止を決定するための振動レベルを指す。たとえば、監視システムが、オーバーホールなどの調整後に振動計測を行い、これを振動レベルの基準値(警報値)として、あらかじめ設定しておく。その後、運用年数の経過と共に、機械的なバランスの崩れ、消耗部品の損傷など、様々な要因により振動レベル(実効値、OA値)が上昇していく。監視システムは、この振動レベルの実測値と警報値とを比較し、その比較結果に応じて、損傷と判定できる場合には、警報を出力する。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2009−243908号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
ところで、上記のように計測される振動の成分に、機械の損傷以外を起因とする成分が混じっていると、あらかじめ設定された値との比較による判定ができなくなる。たとえば、インバータ駆動の電動機とそれを駆動源とする回転機械においては、インバータ側のキャリア周波数成分が振動信号に混じり込んでしまう場合がある。すると、振動法による状態監視に制約が生じることになる。
【0013】
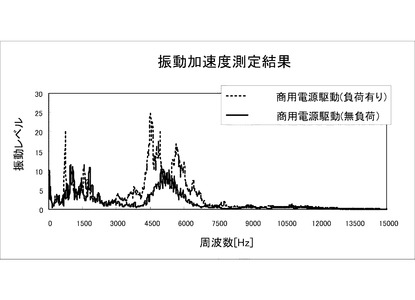
以上のことを、図15〜図18を参照して説明する。すなわち、電動機軸受、歯車などの回転機器の要素部品は、その固有振動数が数kHzに存在する。このため、これら機器が損傷した場合、損傷を示す振動成分は、数kHzの帯域で出現してくる。たとえば、図15に、商用電源で電動機を駆動する場合の周波数と振動レベルとの関係を示す。図中、点線は負荷有りの場合、実線は負荷無しの場合を示している。この図15に示すように、商用電源で電動機を駆動する場合、負荷の有無に応じて、共振成分が4.5〜6[kHz]で出現していることがわかる。振動加速度による状態監視とは、この帯域の変化を監視することである。
【0014】
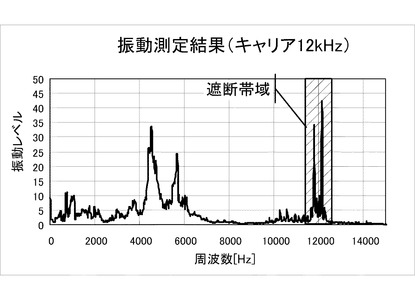
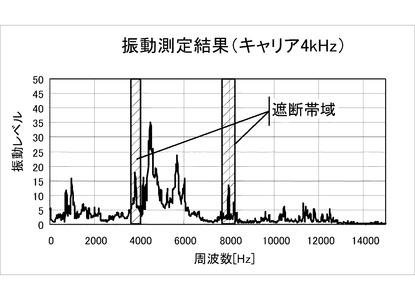
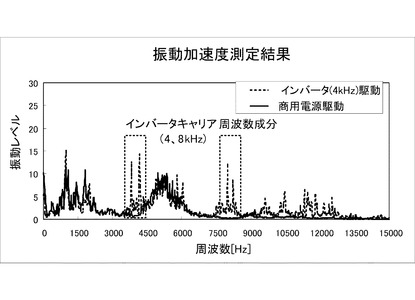
ここで、図15は、商用電源駆動の場合であるため、加速度センサにより検知されるのは、機械的な振動のみである。しかし、インバータ駆動の場合には、図16、図17に示すように、キャリア信号(図中、点線の矩形で囲まれた波形の部分)まで検知してしまう。つまり、インバータ駆動の場合、計測された振動レベルにキャリア成分が含まれるので、機械の振動状態を正確に示しているとはいえなくなってしまう。
【0015】
より具体的には、図16、図17は、商用電源駆動の場合と、インバータ駆動の場合の電動機のハウジング部の振動を、サンプリングレートを50[kHz]で測定した振動レベルの波形を示している。図16は、キャリア周波数が12[kHz]で、電動機を駆動した場合である。図17は、キャリア周波数が4[kHz]で、電動機を駆動した場合である。
【0016】
図16の場合、キャリア周波数が12[kHz]なので、この帯域近くで、キャリア周波数成分が計測されている。図17の場合、キャリア周波数が4[kHz]なので、この帯域近くでキャリア周波数成分が計測されている。特に、図17では、4[kHz]の高調波である8[kHz]の帯域近くの成分も計測されている。
【0017】
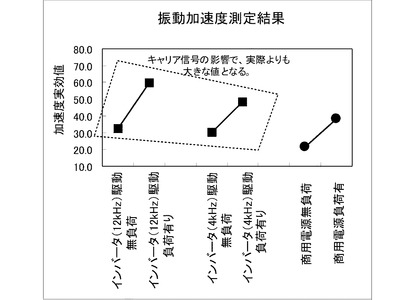
キャリア周波数成分が振動測定帯域内に存在した場合の振動レベルと、商用電源で駆動した場合の振動レベルを、加速度実効値により求めた結果を、図18に示す。インバータ駆動の場合(キャリア周波数12kH、4kH)の振動レベルは、商用電源駆動の場合に比べて、明らかに異なる結果となっている(大きくなっている)。このことから、インバータのキャリア周波数成分を含んだ振動波形に対しては、従来と同じ方法で振動レベルを求めることはできないことがわかる。また、インバータ駆動の場合には、商用電源駆動の場合と同様の警報値を設定することはできないことがわかる。
【0018】
本発明の実施形態は、上記のような従来技術の問題点を解決するために提案されたものであり、その目的は、回転機械により発生する振動に、インバータのキャリア周波数成分が混在した場合であっても、振動状態を正確に監視できる回転機械状態監視装置、回転機械状態監視方法、回転機械状態監視プログラム及び回転機械状態監視システムを提供することにある。
【課題を解決するための手段】
【0019】
上記のような目的を達成するため、実施形態の回転機械状態監視装置は、以下の構成を有することを特徴としている。
(1) インバータにより駆動される回転機械の振動の計測値を記憶する計測値記憶部
(2) 計測値に基づいて、振動波形を求める振動解析部
(3) 振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部
(4) フィルタ処理を行った振動波形に基づいて、振動レベルを判定する振動レベル判定部
【0020】
なお、他の態様として、上記の各部の処理をコンピュータ又は電子回路により実現するための方法及びコンピュータに実行させるプログラムとして捉えることもできる。また、上記回転機械状態監視装置を含むシステムとして捉えることもできる。
【0021】
以上のような態様では、回転機械により発生する振動に、インバータのキャリア周波数成分が混在した場合であっても、振動状態を正確に監視できる。
【図面の簡単な説明】
【0022】
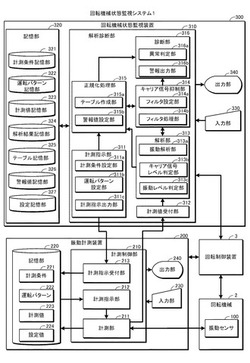
【図1】実施形態の回転機械状態監視システムの一例を示す接続構成図
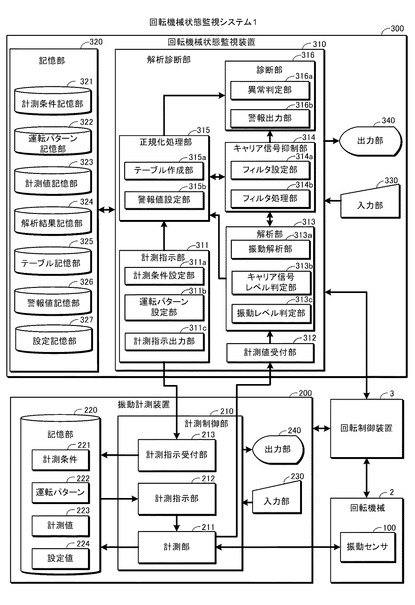
【図2】実施形態の回転機械状態監視システムの一例を示す機能ブロック図
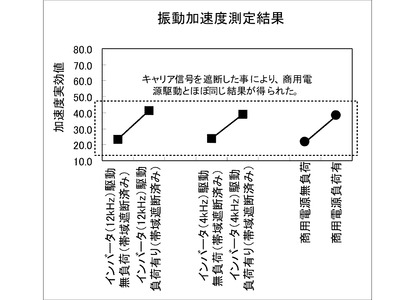
【図3】インバータ駆動の振動波形をフィルタ処理した場合の振動レベルと、商用電源駆動の場合の振動レベルとの比較を示す相関図
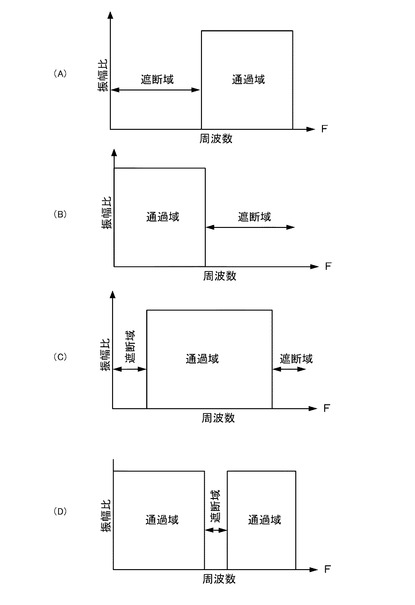
【図4】一般的なフィルタの遮断域と通過域を示す図
【図5】インバータ駆動(キャリア周波数12kHz)の場合の振動波形と遮断帯域を示す図
【図6】インバータ駆動(キャリア周波数4kHz)の場合の振動波形と遮断帯域を示す図
【図7】負荷に応じたキャリア信号レベルの相違を示す図
【図8】負荷に応じた振動レベルの相違を示す図
【図9】回転数を変化させる場合のキャリア周波数を設定した運転パターンを示す図
【図10】任意の回転数におけるキャリア信号レベルと加速度OA値との関係を示す図
【図11】回転数に応じて、振動レベルに許容される変動の範囲を示す図
【図12】実施形態におけるテーブル作成及び警報値設定処理を示すフローチャート
【図13】実施形態における回転機械状態監視処理を示すフローチャート
【図14】実効値の演算式の一例を示す図
【図15】負荷の有無に応じた商用電源駆動の場合の振動波形を示す図
【図16】インバータ駆動(キャリア周波数12kHz)の場合と商用電源駆動の場合の振動波形を示す図
【図17】インバータ駆動(キャリア周波数4kHz)の場合と商用電源駆動の場合の振動波形を示す図
【図18】インバータ駆動の場合と商用電源駆動の場合の振動レベルの相違を示す相関図
【発明を実施するための形態】
【0023】
[A.全体構成]
本実施形態の全体構成を、図1の接続構成図、図2の機能ブロック図を参照して説明する。本実施形態の回転機械状態監視システム1は、回転制御装置3によって制御される回転機械2の振動を診断するシステムである。
【0024】
回転機械2は、駆動源として電動機を備えた機械である。回転機械2の例としては、ファン、ポンプ等であるが、実施形態は、これには限定されない。回転制御装置3は、回転機械2の電動機の回転を制御する装置である。この回転制御装置3は、コンバータ回路、インバータ回路、制御回路等、電動機のインバータ駆動を実現するための基本的な構成(インバータ部)を備えているものとする。また、回転制御装置3は、電動機の運転パターン等、インバータ制御に必要な各種設定を記憶する記憶部を有しているものとする。
【0025】
回転機械状態監視システム1は、振動センサ100、振動計測装置200、回転機械状態監視装置300等を有している。振動センサ100は、電動機の回転による振動を検知するセンサである。振動計測装置200は、振動センサ100からの信号に基づいて、振動を計測する装置である。回転機械状態監視装置300は、振動計測装置200により計測された振動に基づいて、あらかじめ診断に必要なテーブル及び警報値を設定し、計測値の異常の有無を診断する装置である。
【0026】
回転制御装置3、振動計測装置200及び回転機械状態監視装置300は、コンピュータを所定のプログラムで制御することによって実現できる。この場合のプログラムは、コンピュータのハードウェアを物理的に活用することで、以下に述べるような各部の処理を実現するものである。ハードウェアで処理する範囲、プログラムを含むソフトウェアで処理する範囲をどのように設定するかは、特定の態様には限定されない。たとえば、以下に述べる各部のいずれかを、それぞれの処理を実現する回路として構成することも可能である。
【0027】
また、回転制御装置3、振動センサ100、振動計測装置200、回転機械状態監視装置300は、通信ネットワークN及び送受信部(図示せず)を介して、互いに情報を送受信可能に構成されている。
【0028】
なお、図1において、M1は監視モニター、M2a、M2bはクライアントモニターである。これらの監視モニターM1、クライアントモニターM2a、M2bも、通信ネットワークNに接続されたコンピュータである。監視モニターM1、クライアントモニターM2a、M2bは、回転制御装置3、振動センサ100、振動計測装置200、回転機械状態監視装置300からの情報を受信して、それぞれの出力装置に出力することができる。たとえば、ディスプレイに情報を表示させたり、プリンタにより情報をプリントアウトさせたり、スピーカから音声を出力させたりすることにより、オペレータによる状態監視が可能となる。
【0029】
[B.各部の構成]
[1.振動センサ]
振動センサ100としては、たとえば、振動加速度センサを適用可能である。この振動センサ100は、回転機械2における複数の測定ポイントに取り付けられている。この測定ポイントは、たとえば、電動機の軸受のハウジング部若しくはその近傍とすることが考えられる。ただし、測定ポイントの位置は、これには限定されず、回転機械2の容器、取付(設置、固定)具、配管、取付対象等、電動機の回転に起因する振動を検出可能な場所であればよい。測定ポイントの数、これに対応する振動センサ100の数も、特定数には限定されない。
【0030】
[2.振動計測装置]
振動計測装置200は、信号線を介して振動センサ100に接続されている。この振動計測装置200は、計測制御部210、記憶部220、入力部230、出力部240等を有している。
【0031】
計測制御部210は、計測部211、計測指示部212、計測指示受付部213等を有している。計測部211は、振動センサ100からの信号(たとえば、加速度信号)を計測して、その計測値を記憶部220に記憶する処理部である。計測指示部212は、記憶部220に記憶された計測条件221及び運転パターン222に従って、回転制御装置3による回転機械2の運転及び計測部211による振動計測を制御する処理部である。計測指示受付部213は、回転機械状態監視装置300から受信した計測条件221及び運転パターン222を受け付けて、記憶部220に記憶する処理部である。
【0032】
ここで「計測条件221」とは、振動センサ100により振動を計測する際の各種の条件をいう。たとえば、サンプリングレート、測定レンジ等は、計測条件221に含まれるものとする。サンプルレートとは、検出値をデジタルデータとして取り込む1秒当たりの回数を意味する。測定レンジとは、測定できる加速度の最大値のレベルを意味する。
【0033】
「運転パターン222」は、回転機械2の電動機を運転する各種のパターンをいう。たとえば、回転数、負荷パターン等は、運転パターン222に含まれるものとする。振動計測装置200は、上記のような運転パターン222、計測条件221を適宜変更して、振動計測を行うことができる。これにより、後述するテーブル及び適切な警報値の設定が可能となる。
【0034】
記憶部220は、計測条件221、運転パターン222、計測値223、設定値224等の、計測制御部210の処理に必要な情報を記憶する構成部である。なお、計測値223は、振動センサ100からの信号に基づいて計測部211が計測した値である。また、設定値224は、演算式、パラメータ、しきい値等、計測制御部210の処理に必要な各種の設定に関する値である。
【0035】
入力部230は、計測制御部210の処理に必要な情報の入力、処理の選択や指示を入力する構成部である。この入力部230としては、たとえば、キーボード、マウス、タッチパネル(表示装置に構成されたものを含む)、スイッチ等が考えられる。但し、現在又は将来において利用可能なあらゆる入力装置を含む。
【0036】
出力部240は、測定結果、計測条件221、運転パターン222、テーブル、警報値、診断結果、異常発生等を、オペレータ等が認識可能となるように出力する構成部である。この出力部240としては、たとえば、表示装置、プリンタ、スピーカ、ブザー等が考えられる。但し、現在又は将来において利用可能なあらゆる出力装置を含む。
【0037】
なお、振動計測装置200としては、図1に示すように、設置型のものや、携帯型のものも適用可能である。携帯型の振動計測装置200としては、現在又は将来において利用可能な小型の情報端末が利用可能である。たとえば、PDA(Personal Digital Assistant)を、振動計測装置200に適用することができる。また、振動計測装置200による計測の対象となる回転機械2の数、接続される振動センサ100の数は、特定の数には限定されない。
【0038】
たとえば、図1においては、携帯型の振動計測装置200は単一の回転機械2、単一の振動センサ100からの計測値を計測している。また、設置型の振動計測装置200は、複数の回転機械2、複数の振動センサ100からの計測値を、同時又は異なるタイミングで計測できるものとしている。ただし、これは一例に過ぎず、回転機械2の数、振動センサ100の数は、携帯型か設置型かを問わず、振動計測装置200の処理能力等に応じて決定すればよい。
【0039】
[3.回転機械状態監視装置]
回転機械状態監視装置300は、解析診断部310、記憶部320、入力部330、出力部340等を有している。
【0040】
[3−1.解析診断部]
解析診断部310は、(1)計測指示部311、(2)計測値受付部312、(3)解析部313、(4)キャリア信号抑制部314、(3)正規化処理部315、(5)診断部316等を有している。
【0041】
(1)計測指示部
計測指示部311は、計測条件設定部311a、運転パターン設定部311b、計測指示出力部311c等を有している。計測条件設定部311aは、振動計測装置200が計測する際の計測条件221を設定する処理部である。運転パターン設定部311bは、振動計測装置が計測する際の、回転機械2の運転パターン222を設定する処理部である。計測指示出力部311cは、振動計測装置200に対して、設定された計測条件221及び運転パターン222を含む計測指示を出力する処理部である。
【0042】
(2)計測値受付部
計測値受付部312は、振動計測装置200から受信した計測値を受け付け、記憶部320に記憶する処理部である。
【0043】
(3)解析部
解析部313は、振動解析部313a、キャリア信号レベル判定部313b、振動レベル判定部313c等を有している。振動解析部313aは、計測値に基づいて周波数毎のレベルによる振動波形(たとえば、振動加速度波形)を求める処理部である。これは、上記のFET解析によるパワースペクトルレベルとすることができる。
【0044】
キャリア信号レベル判定部313bは、振動解析部313aによる解析結果である振動波形に基づいて、キャリア信号レベルを判定する処理部である。たとえば、運転パターンに設定されたキャリア周波数に対応する付近の成分およびその高調波成分から、キャリア信号成分を判定し、そのピークレベルを判定することができる。
【0045】
振動レベル判定部313cは、振動波形から、後述するフィルタ処理によりキャリア周波数成分を除去することにより、振動レベルを判定する処理部である。たとえば、所定帯域を含むレベルの代表値を求める。この代表値としては、たとえば、実効値とすることが考えられる。以上のような解析部313による解析結果についても、記憶部320に記憶される。
【0046】
ここで、図3に、インバータ駆動の場合(キャリア周波数12kH、4kH)に、フィルタ処理で加工した(帯域遮断済み)振動波形から、振動レベル(実効値)を求めた結果を示す。図中右側は、図18と同様に、商用電源駆動の場合の振動レベルを示している。図3では、インバータ駆動の場合であっても、フィルタ処理を行うことにより、振動レベルが、商用電源駆動の結果とほぼ同じ結果となることがわかる。
【0047】
(4)キャリア信号抑制部
キャリア信号抑制部314は、フィルタ設定部314a、フィルタ処理部314b等を有している。フィルタ設定部314aは、振動波形から、キャリア信号成分を取り除くためのフィルタを設定する処理部である。フィルタ処理部314bは、設定されたフィルタにより、キャリア信号に対応する帯域の成分を、振動波形から除去する処理部である。フィルタ処理部314bにおけるフィルタの遮断特性は、キャリア周波数に応じて、あらかじめ複数用意しておき、フィルタ設定部314aにより、適宜選択されるようにすることができる。
【0048】
ここで、図4に、一般的なフィルタの構成を示す。フィルタには、(A)高域通過フィルタ、(B)低域通過フィルタ、(C)帯域遮断フィルタ、(D)帯域通過フィルタの4種類がある。本実施形態では、たとえば、帯域遮断フィルタを使用する。図5に、振動波形から、帯域遮断フィルタで取り除かれるキャリア周波数12[kHz]の信号を示す。また、図6に、振動波形から帯域遮断フィルタで取り除かれる4[kHz]及び8[kHz]の信号を示す。
【0049】
なお、上記のフィルタ処理は、帯域遮断フィルタではなく、高域通過、低域通過フィルタを組み合わせても、同様の効果を得ることができる。フィルタは、アナログフィルタ、デジタルフィルタいずれでも同じ結果が得られるので、どちらを使用しても構わない。
【0050】
(5)正規化処理部
正規化処理部315は、テーブル作成部315a、警報値設定部315b等を有している。テーブル作成部315aは、各種の運転パターンで運転して得られた振動レベルと、その際のキャリア信号レベルとを関連付けたテーブルを作成する処理部である。警報値設定部315bは、キャリア信号レベルで振動レベルを正規化して、このレベルで警報値を設定する処理部である。このようなテーブル作成部315a及び警報値設定部315bによる処理を、より具体的に詳説する。
【0051】
(負荷とキャリア信号レベルとの関係)
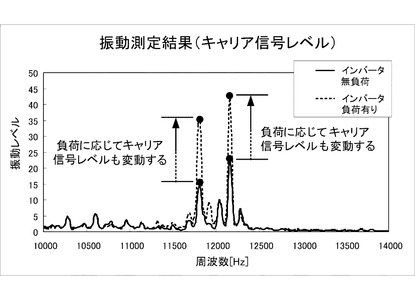
まず、図7に、回転機械2が有する電動機を、回転制御装置3に含まれるインバータ部により、負荷条件を変えて駆動した場合の振動加速度について、振動解析部313aが解析した振動波形の一例を示す。図7において、横軸は周波数(10kH〜14kH)、縦軸は振動レベルであり、無負荷の場合を実線、負荷有りの場合を点線で示している。無負荷の場合と負荷有りの場合とを比較すると、それぞれのピークに対応するキャリア信号の周波数帯域については、変化はない。しかし、キャリア信号レベル判定部313bが判定するキャリア信号のピークレベルは、負荷条件(負荷の有無)で大きく異なっていることがわかる。これは電動機側の負荷電流とインバータキャリア信号レベルが関係している。負荷増に応じて、キャリア信号レベルを上げて駆動する必要があるからである。
【0052】
(負荷と振動レベルとの関係)
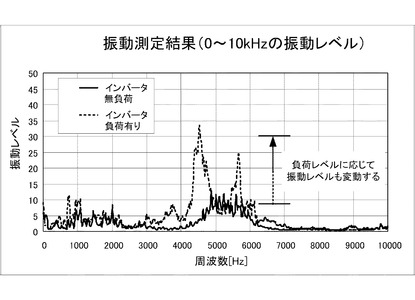
そして、電動機の場合、負荷増によりシャフトにかかる力が増えるため、それを支える軸受側の振動レベルも上がることは、容易に推察できる。図8に、負荷の有無に応じた共振部分の周波数レベルについて、振動解析部313aにより解析した結果の一例を示す。図8において、横軸は周波数(0kH〜10kH)、縦軸は振動レベルであり、無負荷の場合を実線、負荷有りの場合を点線で示している。図8から明らかなように、負荷増に応じて共振成分が増え、振動レベルは変動(増加)している。ここで、上記のように、負荷増に応じて、キャリア信号レベルは増大している。このため、図7に示したように、負荷増に応じて、振動解析部313aが解析する振動波形において、キャリア周波数成分のピークレベルも増大する。したがって、キャリア信号レベル判定部313bがキャリア周波数成分のピークレベルを判定することにより、振動レベルの中の負荷の変動分を推定するすることができる。
【0053】
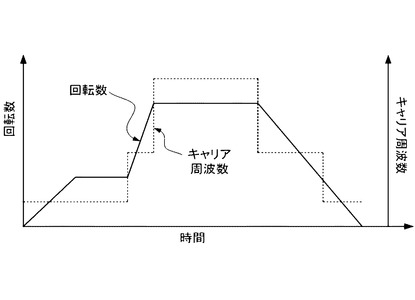
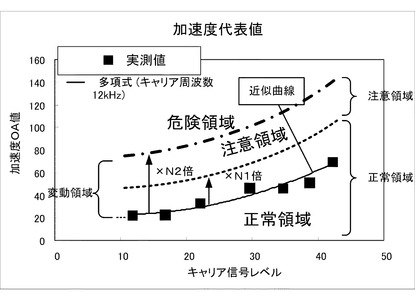
(テーブル作成処理)
回転制御装置3のインバータ部が、回転機械2の電動機の回転数を変化させて運転する場合のキャリア周波数を設定した運転パターン222の一例を、図9に示す。図9において、横軸が時間、縦軸が回転数及びキャリア周波数であり、実線が回転数、点線がキャリア周波数を示している。インバータ本来の機能から、キャリア周波数の昇降に応じて、回転数も昇降する。キャリア周波数を変化させた場合、回転数は徐々に上昇若しくは下降する。一定のキャリア周波数を維持することにより、回転数を一定の値に安定させることができる。ただし、後述のように、同じ回転数でも、負荷パターンは変動する。また、任意の回転数で電動機を駆動し、負荷を変動させた場合に作成される振動レベルとキャリア信号レベルとの関係を模式的に示した一例を、図10に示す。図10は、横軸が、キャリア信号レベル判定部313bが判定したキャリア信号レベルであり、縦軸が、振動レベル判定部313cが判定した加速度OA値(振動レベル)である。この加速度OA値は、フィルタ処理部314bが、キャリア周波数成分を削除した値である。図10には、このようなキャリア信号レベルと加速度OA値から求めた近似曲線を実線で示している。近似曲線は、線形、対数、指数、累乗、多項式などより近似し易い曲線を用いればよい。
【0054】
本実施形態においては、テーブル作成部315aが、上記のように振動レベルとキャリア信号レベルとの関係を、近似曲線により求め、これを回転数毎にテーブル化する。たとえば、ファン、ポンプでは、同じ回転数でも、しばしば負荷パターンが変動する。上記のように、負荷の変動に応じて、振動レベルは変化するため、同じ回転数による運転において、種々の負荷パターンによる種々の振動レベルを得ることができる。テーブル作成部315aは、この振動レベルとキャリア信号レベルとを関連づけてテーブル化するので、回転数毎に、異なる負荷パターンに対する振動レベルを、あらかじめ求めておくことができる。
【0055】
(警報値設定の問題)
警報値は、回転数毎の振動レベルを基準として設定することが一般的である。しかしながら、この場合、運転負荷条件の変動によるばらつきが発生するため、設定された警報値が必ずしも適切ではない場合が生じていた。たとえば、警報値が変動の下側で設定されると、早くから警報を発生させてしまうことになる。また、警報値が変動の上側で設定されると、警報タイミングが遅れることになる。つまり警報値の設定において、負荷条件の変動を考慮できないということになる。
【0056】
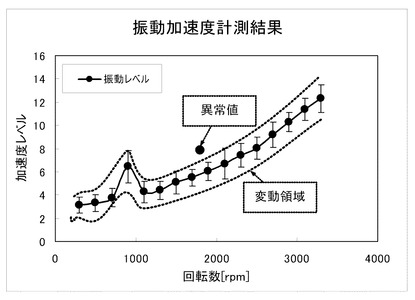
(警報値設定処理)
本実施形態においては、警報値設定部315bが、図10に示したような近似曲線から、負荷変動に応じた振動レベルの変動を考慮した警報値を設定する。たとえば、図10では、近似曲線の値をN1倍した値を注意領域とし、更にN2倍(N1<N2)した値を危険領域の警報値とする。注意領域未満の領域は正常領域であり、正常領域以上、危険領域未満の領域が、警報が不要な変動領域となる。本実施形態では、上記のような警報値の設定により、警報が不要な振動レベルの変動幅を考慮して、回転数毎にキャリア信号レベルで振動レベルを正規化している。このため、たとえば、図11の振動レベル(加速度レベル)の変動領域に示すように、回転数[rpm]毎に、負荷変動により生じる振動レベルの変動分を考慮して、警報値を設定することができる。上記のテーブル及び警報値は、記憶部320に記憶される。以上のように、警報値の設定処理を回転機械の初期条件として登録することにより、より正確な状態監視が可能になる。
【0057】
[診断部]
診断部316は、異常判定部316a、警報出力部316b等を有している。異常判定部316aは、設定された警報値に基づいて、計測された振動レベルから、回転機械2の異常を判定する処理部である。たとえば、図11における変動領域から外れる値が検出された場合を、異常と判断することができる。なお、警報値は、上記のように、負荷条件の変動に起因する振動レベルの変動幅を考慮して設定されている。このため、異常判定部316aは、振動レベルが変動領域に収まっている場合、負荷条件の変動に起因する振動と判定することができる。また、振動レベルが変動領域から外れている場合、機械的変化(劣化、摩耗等)によるものと判定することができる。警報出力部316bは、異常と判定された場合に、警報を出力する処理部である。たとえば、異常を知らせる情報(たとえば、文字、画像、音声等)を、後述する出力部340若しくは通信ネットワークNに出力することができる。
【0058】
[記憶部]
記憶部320は、回転機械状態監視装置300において必要な情報を記憶する構成部である。この記憶部320は、計測条件記憶部321、運転パターン記憶部322、計測値記憶部323、解析結果記憶部324、テーブル記憶部325、警報値記憶部326、設定記憶部327等を有している。
【0059】
計測条件記憶部321は、計測指示部311における計測条件設定部311aが設定する計測条件221を、あらかじめ記憶する記憶部である。運転パターン記憶部322は、運転パターン設定部311bが設定する運転パターン222を、あらかじめ記憶する記憶部である。
【0060】
計測値記憶部323は、計測値受付部312が受け付けた計測値223を記憶する記憶部である。解析結果記憶部324は、解析部313による解析結果を記憶する記憶部である。解析結果には、振動解析部313aにより解析された振動波形、キャリア信号レベル判定部313bにより判定されたキャリア信号レベル、振動レベル判定部313cにより判定された振動レベル等が含まれる。テーブル記憶部325は、テーブル作成部315aにより作成されたテーブルを記憶する記憶部である。警報値記憶部326は、警報値設定部315bにより設定された警報値を記憶する記憶部である。
【0061】
設定記憶部327は、解析診断部310の処理に必要な演算式、パラメータ、しきい値等、各種の設定を記憶する処理部である。上記のような記憶部320に記憶される情報は、あらかじめ後述する入力部330から入力されたもの、通信ネットワークNを介して入力されたものを用いることができる。
【0062】
[入力部]
入力部330は、回転機械状態監視装置300の処理に必要な情報の入力、処理の選択や指示を入力する構成部である。この入力部330としては、現在又は将来において利用可能なあらゆる入力装置を含むことは、入力部230と同様である。
【0063】
[出力部]
出力部340は、測定結果、計測条件221、運転パターン222、テーブル、警報値、診断結果、異常発生等を、オペレータ等が認識可能となるように出力する構成部である。この出力部340としては、現在又は将来において利用可能なあらゆる出力装置を含むことは、出力部240と同様である。なお、上記のような情報を画面上に表示させる他、メールとして生成して送信する機能を持たせてもよい。たとえば、出力部が、異常発生をメールで配信してもよい。
【0064】
[C.作用]
以上のような本実施形態の作用を説明する。なお、以下に述べる各部の処理を、コンピュータ若しくは電子回路により実行する方法、各部の処理をコンピュータに実行させるプログラム及びプログラムを記録した記録媒体も、実施形態の一態様である。
【0065】
[テーブルの作成と警報値の設定]
まず、テーブルの作成と警報値の設定について、図12のフローチャートを参照して説明する。計測条件設定部311aは、計測条件記憶部321に記憶された計測条件221に基づいて、計測条件221を設定する(ステップS01)。運転パターン設定部311bは、あらかじめ運転パターン記憶部322に記憶された運転パターン222に基づいて、初期の運転パターン222を設定する(ステップS02)。なお、入力部330からの入力に応じて、計測条件設定部311a及び運転パターン設定部311bが、計測条件221及び運転条件を設定してもよい。そして、計測指示出力部311cは、設定された計測条件221及び運転パターン222を含む計測指示を、振動計測装置200に出力する(ステップS03)。
【0066】
計測制御部210の計測指示受付部213は、上記の計測指示を受け付けて、その計測指示を記憶部220に記憶する。回転制御装置3は、計測制御部210が受け付けた運転パターン222に従って、回転機械2の回転を制御する。なお、運転パターン222は、回転機械状態監視装置300から回転制御装置3に送信されて読み込まれる態様であっても、あらかじめ回転制御装置3の記憶部に記憶されたものを用いる態様であってもよい。
【0067】
計測指示部212は、受け付けた計測条件221に従って、計測部211による計測を指示する。計測部211は、振動センサ100から、運転中の回転機械2の振動信号を検出する。検出された振動信号は、計測値として記憶部220に記憶されるとともに、回転機械状態監視装置300に出力される。
【0068】
計測値受付部312は、入力された計測値を受け付けて、計測値記憶部323に記憶する(ステップS04)。振動解析部313aは、この計測値に基づいて、振動信号の波形を求める(ステップS05)。キャリア信号レベル判定部313bは、振動解析部313aにより求めた振動波形に基づいて、キャリア信号のレベルを判定する(ステップS06)。
【0069】
また、フィルタ設定部314aは、キャリア成分の除去に必要なフィルタを設定する(ステップS07)。フィルタ処理部314bは、設定されたフィルタによるフィルタ処理を行う(ステップS08)。振動レベル判定部313cは、フィルタ処理された信号に基づいて、振動レベルを判定する(ステップS09)。このような解析部313による解析結果は、解析結果記憶部324に記憶される(ステップS10)。
【0070】
運転パターン設定部311bは、次の運転パターン222がある場合には(ステップS11のYES)、新たな運転パターン222を設定し(ステップS02)、上記の処理を繰り返す(ステップS03〜S10)。すべての運転パターン222による運転がなされた場合(ステップS11のNO)、テーブル作成部315aは、解析結果記憶部324に記憶された解析結果に基づいて、テーブルを作成する(ステップS12)。テーブル記憶部325は、作成されたテーブルを記憶する(ステップS13)。警報値設定部315bは、作成されたテーブルに基づいて、警報値を設定する(ステップS14)。警報値記憶部326は、設定された警報値を記憶する(ステップS15)。
【0071】
[異常判定]
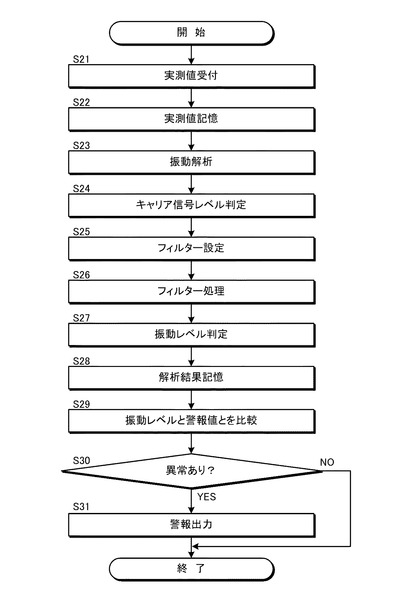
次に、回転機械2の運転中における異常判定について、図13のフローチャートを参照して説明する。まず、回転制御装置3により、回転機械2が運転されると、振動センサ100により検知された振動信号が、計測部211により、計測値が計測される。ここで、テーブル及び警報値の設定のためではなく、実際の運用のための運転における計測値を、実測値とする。この実測値は、計測部211により、回転機械状態監視装置300に出力される。
【0072】
計測値受付部312は、実測値を受け付けて(ステップS21)、計測値記憶部323に記憶する(ステップS22)。振動解析部313aは、実測値に基づいて、振動波形を求める(ステップS23)。キャリア信号レベル判定部313bは、振動波形からキャリア成分のレベルを判定する(ステップS24)。
【0073】
フィルタ設定部314aは、キャリア成分を除去するのに必要なフィルタを設定する(ステップS25)。フィルタ処理部314bは、設定されたフィルタによるフィルタ処理を行う(ステップS26)。振動レベル判定部313cは、フィルタ処理された信号に基づいて、振動レベルを判定する(ステップS27)。このような解析部313による解析結果を、解析結果記憶部324が記憶する(ステップS28)。
【0074】
診断部316の異常判定部316aは、実測値から得られた振動レベルと、警報値記憶部326に記憶された警報値とを比較して、異常の有無を判定する(ステップS29)。異常判定部316aにより、異常ありと判定された場合には(ステップS30のYES)、警報出力部316bが警報を出力する(ステップS31)。異常がなければ(ステップS30のNO)、警報の出力はなされない。
【0075】
[D.効果]
以上のような本実施形態の効果は、以下の通りである。
振動波形に対して、フィルタ処理を用意することにより、キャリア信号が混在した振動波形であっても、その影響を抑制し、商用電源駆動時と同様の振動レベルによる診断を行うことができる。
【0076】
運転パターンを種々変更し、それぞれの振動レベルとキャリア信号レベルを正規化したテーブルを作成するので、負荷変動による振動レベルの変動によるばらつきを考慮した警報値を設定することができる。このため、実測値から求めた振動レベルの変動が、負荷変動による変動か、機械の損傷による変動かを、正確に判断することができる。これは、特に、回転数・負荷が絶えず変動する、ファン・ポンプなどに加え、電車などの車両、エレベータ、エスカレータ、輸送機器全般の振動状態監視に有効である。
【0077】
以上により、回転機械の状態監視の合理的な運用が可能になり、回転機械の異常の有無の監視が容易となる。また、回転機械損傷事故の未然防止につながる。これに加えて、警報設定を自動化するので、監視員の負担軽減を図ることができる。
【0078】
[E.他の実施形態]
本実施形態は上記の態様には限定されない。
(1)フィルタ設定部により選択されるフィルタ処理部として、テーブルにおけるキャリア信号レベル毎に、フィルタを用意してもよい。また、フィルタ設定部により設定するフィルタの遮断帯域については、フィルタ設定部が、キャリア周波数成分をその都度判定して決定してもよい。
(2)代表値としては、実効値の中央値又は平均値、オーバーオール値、ピーク値、絶対値平均値、その他の振動レベルを代表する値でも構わない。また、代表値として、たとえば、歪度、波形率、波高率などの兆候パラメータを用いてもよい。
(3)上記の態様では、テーブル及び警報値の設定にあたり、運転パターン、特に、回転数を変えた運転を行ったが、他の運転パターンを種々変更して運転を行ってもよい。また、計測条件を、種々変更して運転を行ってもよい。
【0079】
(4)上記の各処理部、記憶部等は、共通のコンピュータにおいて実現してもよいし、通信ネットワークで接続された複数のコンピュータによって実現してもよい。各装置における記憶部を共通化してもよいし、分散配置してもよい。
【0080】
(5)上記の各記憶部は、典型的には、内蔵された若しくは外部接続された各種メモリ、ハードディスク、光ディスク等により構成できるが、現在又は将来において利用可能なあらゆる記憶媒体を利用可能である。演算に用いるレジスタ等も、記憶部として捉えることができる。すでに情報が記憶された記憶媒体を、読み取り装置に装着することにより、記憶内容を各種の処理に利用可能となる態様でもよい。記憶の態様も、長時間記憶が保持される態様のみならず、処理のために一時的に記憶され、短時間で消去若しくは更新される態様も含まれる。
【0081】
(6)通信ネットワークは、情報の送受信が可能な伝送路を広く含む。伝送路としては、有線若しくは無線のあらゆる伝送媒体を適用可能であり、どのようなLANやWANを経由するかは問わない。通信プロトコルについても、現在又は将来において利用可能なあらゆるものを適用可能である。
【0082】
(7)実施形態に用いられる情報の具体的な内容、値は自由であり、特定の内容、数値には限定されない。実施形態において、値(たとえば、警報値)に対する計測値の大小判断、一致不一致の判断等において、以上、以下として値を含めるように判断するか、より大きい、より小さい、未満として値を含めないように判断するかも自由である。したがって、たとえば、値の設定によっては、「以上」を「より大きい」、「以下」を「より小さい」「未満」と読み替えても、実質的には同じである。
【0083】
(8)本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0084】
1…回転機械状態監視システム
2…回転機械
3…回転制御装置
100…振動センサ
210…計測制御部
211…計測部
212…計測指示部
213…計測指示受付部
230…入力部
240…出力部
300…回転機械状態監視装置
310…解析診断部
311…計測指示部
311a…計測条件設定部
311b…運転パターン設定部
311c…計測指示出力部
312…計測値受付部
313…解析部
313a…振動解析部
313b…キャリア信号レベル判定部
313c…振動レベル判定部
314…キャリア信号抑制部
314a…フィルタ設定部
314b…フィルタ処理部
315…正規化処理部
315a…テーブル作成部
315b…警報値設定部
316…診断部
316a…異常判定部
316a…警報出力部
321…計測条件記憶部
322…運転パターン記憶部
323…計測値記憶部
324…解析結果記憶部
325…テーブル記憶部
326…警報値記憶部
327…設定記憶部
230,330…入力部
240,340…出力部
【技術分野】
【0001】
本発明の実施形態は、回転機械の振動を監視するための回転機械状態監視装置、回転機械状態監視方法及び回転機械状態監視プログラムに関する。
【背景技術】
【0002】
[インバータ制御について]
ファン、ポンプなど、電動機を駆動源として回転駆動される回転機械は、広く一般に普及している。かかる回転機械においては、電動機をインバータ(Inverter)で駆動するケースが増えてきている。インバータは、直流電力から交流電力を電気的に生成する電源回路を持つ電力変換装置である。このインバータを用いると、商用電源により駆動する場合に比べて、電圧・周波数を変更したり、一定に保つことが容易に実現できる。このため、インバータを回転機械に組み込むことで、必要な回転数への制御が容易となり、高い省エネルギー効果が実現できる。
【0003】
インバータの出力制御の方式としては、たとえば、PAM(Pulse Amplitude Modulation:パルス振幅変調)方式とPWM(Pulse Width Modulation:パルス幅変調)方式がある。PAM方式では、パルス振幅により電圧が決定される。PWM方式では、パルス幅により電圧が決定される。PWM方式は、周波数変化に対する電圧変化の応答遅れが少なく、高応答特性が得られるため、広く用いられている。ただし、PWM方式において、パルス幅を決定するキャリア周波数成分(数kHz〜約20kHz)は、振動の発生原因となる。
【0004】
[振動法による回転機械状態監視について]
[概要]
ところで、近年では、ファン、ポンプなど回転機械の設備の延命化を目的として、振動法による状態監視を行うケースが増えてきている。振動法による状態監視とは、回転機械の本体と、その駆動源である電動機などの振動を計測し、それぞれの機械的異常の有無を、計測により得られた振動データから診断する手法である。
【0005】
より具体的には、たとえば、以下のような現象を監視して、異常の有無を診断することができる。
(1) 機器の異共振による異常振動
(2) 消耗部品(軸受、歯車など)の損傷等について、その固有振動数に応じた周波数成分毎の振動レベルの推移
【0006】
[振動レベル]
振動の大きさ(振動レベル)を評価する物理量には、振動変位、振動速度、振動加速度の3種類がある。これら3種類のパラメータは、概ね以下のような周波数帯域の振動に対応すると考えることができる。
・振動変位 : 0〜 500[Hz]
・振動速度 : 0〜 1000[Hz]
・振動加速度 :1000〜20000[Hz]
このため、振動レベルを評価する値として、一般的には、低周波の場合は変位計や速度計の値、高周波の場合は加速度計の値が用いられている。
【0007】
なお、振動加速度の監視周波数帯域については、従来は、1000〜10000[Hz]であった。しかし、近年では、監視周波数帯域は、1000〜20000[Hz]に広がってきている。これは、機械共振周波数のより高い次数まで検知し、きめ細かい監視を行うためである。
【0008】
振動レベルは、周波数毎のレベルを指す場合と、大まかに定められた帯域すべてを含んだ波形のレベルを指す場合がある。前者は、FFT解析で得られる周波数成分を表現したパワースペクトルレベルを指す。後者は、実効値(RMS値)、オーバーオール値(OA値)などを指す。実効値の演算式の一例を、図14に示す。
【0009】
[振動解析方法]
振動の解析方法としては、たとえば、上述の実効値、OA値を常に監視することにより、機械全体の状態変化を的確に把握する方法がある。また、あらかじめ軸受や歯車の共振周波数を求めておき、その周波数成分のパワースペクトルレベルを常に監視することにより、これら機器の損傷を把握する方法もある。つまり、実効値、OA値、パワースペクトルレベル等は、それぞれ目的が異なるが、回転機械の異常発生の有無を把握するために、重要なパラメータである。
【0010】
[警報値について]
警報値とは、回転機械の監視システムが、機器の損傷程度を判定するために設けられる値である。これは、監視システムが、機器の状態監視間隔、運用停止を決定するための振動レベルを指す。たとえば、監視システムが、オーバーホールなどの調整後に振動計測を行い、これを振動レベルの基準値(警報値)として、あらかじめ設定しておく。その後、運用年数の経過と共に、機械的なバランスの崩れ、消耗部品の損傷など、様々な要因により振動レベル(実効値、OA値)が上昇していく。監視システムは、この振動レベルの実測値と警報値とを比較し、その比較結果に応じて、損傷と判定できる場合には、警報を出力する。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2009−243908号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
ところで、上記のように計測される振動の成分に、機械の損傷以外を起因とする成分が混じっていると、あらかじめ設定された値との比較による判定ができなくなる。たとえば、インバータ駆動の電動機とそれを駆動源とする回転機械においては、インバータ側のキャリア周波数成分が振動信号に混じり込んでしまう場合がある。すると、振動法による状態監視に制約が生じることになる。
【0013】
以上のことを、図15〜図18を参照して説明する。すなわち、電動機軸受、歯車などの回転機器の要素部品は、その固有振動数が数kHzに存在する。このため、これら機器が損傷した場合、損傷を示す振動成分は、数kHzの帯域で出現してくる。たとえば、図15に、商用電源で電動機を駆動する場合の周波数と振動レベルとの関係を示す。図中、点線は負荷有りの場合、実線は負荷無しの場合を示している。この図15に示すように、商用電源で電動機を駆動する場合、負荷の有無に応じて、共振成分が4.5〜6[kHz]で出現していることがわかる。振動加速度による状態監視とは、この帯域の変化を監視することである。
【0014】
ここで、図15は、商用電源駆動の場合であるため、加速度センサにより検知されるのは、機械的な振動のみである。しかし、インバータ駆動の場合には、図16、図17に示すように、キャリア信号(図中、点線の矩形で囲まれた波形の部分)まで検知してしまう。つまり、インバータ駆動の場合、計測された振動レベルにキャリア成分が含まれるので、機械の振動状態を正確に示しているとはいえなくなってしまう。
【0015】
より具体的には、図16、図17は、商用電源駆動の場合と、インバータ駆動の場合の電動機のハウジング部の振動を、サンプリングレートを50[kHz]で測定した振動レベルの波形を示している。図16は、キャリア周波数が12[kHz]で、電動機を駆動した場合である。図17は、キャリア周波数が4[kHz]で、電動機を駆動した場合である。
【0016】
図16の場合、キャリア周波数が12[kHz]なので、この帯域近くで、キャリア周波数成分が計測されている。図17の場合、キャリア周波数が4[kHz]なので、この帯域近くでキャリア周波数成分が計測されている。特に、図17では、4[kHz]の高調波である8[kHz]の帯域近くの成分も計測されている。
【0017】
キャリア周波数成分が振動測定帯域内に存在した場合の振動レベルと、商用電源で駆動した場合の振動レベルを、加速度実効値により求めた結果を、図18に示す。インバータ駆動の場合(キャリア周波数12kH、4kH)の振動レベルは、商用電源駆動の場合に比べて、明らかに異なる結果となっている(大きくなっている)。このことから、インバータのキャリア周波数成分を含んだ振動波形に対しては、従来と同じ方法で振動レベルを求めることはできないことがわかる。また、インバータ駆動の場合には、商用電源駆動の場合と同様の警報値を設定することはできないことがわかる。
【0018】
本発明の実施形態は、上記のような従来技術の問題点を解決するために提案されたものであり、その目的は、回転機械により発生する振動に、インバータのキャリア周波数成分が混在した場合であっても、振動状態を正確に監視できる回転機械状態監視装置、回転機械状態監視方法、回転機械状態監視プログラム及び回転機械状態監視システムを提供することにある。
【課題を解決するための手段】
【0019】
上記のような目的を達成するため、実施形態の回転機械状態監視装置は、以下の構成を有することを特徴としている。
(1) インバータにより駆動される回転機械の振動の計測値を記憶する計測値記憶部
(2) 計測値に基づいて、振動波形を求める振動解析部
(3) 振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部
(4) フィルタ処理を行った振動波形に基づいて、振動レベルを判定する振動レベル判定部
【0020】
なお、他の態様として、上記の各部の処理をコンピュータ又は電子回路により実現するための方法及びコンピュータに実行させるプログラムとして捉えることもできる。また、上記回転機械状態監視装置を含むシステムとして捉えることもできる。
【0021】
以上のような態様では、回転機械により発生する振動に、インバータのキャリア周波数成分が混在した場合であっても、振動状態を正確に監視できる。
【図面の簡単な説明】
【0022】
【図1】実施形態の回転機械状態監視システムの一例を示す接続構成図
【図2】実施形態の回転機械状態監視システムの一例を示す機能ブロック図
【図3】インバータ駆動の振動波形をフィルタ処理した場合の振動レベルと、商用電源駆動の場合の振動レベルとの比較を示す相関図
【図4】一般的なフィルタの遮断域と通過域を示す図
【図5】インバータ駆動(キャリア周波数12kHz)の場合の振動波形と遮断帯域を示す図
【図6】インバータ駆動(キャリア周波数4kHz)の場合の振動波形と遮断帯域を示す図
【図7】負荷に応じたキャリア信号レベルの相違を示す図
【図8】負荷に応じた振動レベルの相違を示す図
【図9】回転数を変化させる場合のキャリア周波数を設定した運転パターンを示す図
【図10】任意の回転数におけるキャリア信号レベルと加速度OA値との関係を示す図
【図11】回転数に応じて、振動レベルに許容される変動の範囲を示す図
【図12】実施形態におけるテーブル作成及び警報値設定処理を示すフローチャート
【図13】実施形態における回転機械状態監視処理を示すフローチャート
【図14】実効値の演算式の一例を示す図
【図15】負荷の有無に応じた商用電源駆動の場合の振動波形を示す図
【図16】インバータ駆動(キャリア周波数12kHz)の場合と商用電源駆動の場合の振動波形を示す図
【図17】インバータ駆動(キャリア周波数4kHz)の場合と商用電源駆動の場合の振動波形を示す図
【図18】インバータ駆動の場合と商用電源駆動の場合の振動レベルの相違を示す相関図
【発明を実施するための形態】
【0023】
[A.全体構成]
本実施形態の全体構成を、図1の接続構成図、図2の機能ブロック図を参照して説明する。本実施形態の回転機械状態監視システム1は、回転制御装置3によって制御される回転機械2の振動を診断するシステムである。
【0024】
回転機械2は、駆動源として電動機を備えた機械である。回転機械2の例としては、ファン、ポンプ等であるが、実施形態は、これには限定されない。回転制御装置3は、回転機械2の電動機の回転を制御する装置である。この回転制御装置3は、コンバータ回路、インバータ回路、制御回路等、電動機のインバータ駆動を実現するための基本的な構成(インバータ部)を備えているものとする。また、回転制御装置3は、電動機の運転パターン等、インバータ制御に必要な各種設定を記憶する記憶部を有しているものとする。
【0025】
回転機械状態監視システム1は、振動センサ100、振動計測装置200、回転機械状態監視装置300等を有している。振動センサ100は、電動機の回転による振動を検知するセンサである。振動計測装置200は、振動センサ100からの信号に基づいて、振動を計測する装置である。回転機械状態監視装置300は、振動計測装置200により計測された振動に基づいて、あらかじめ診断に必要なテーブル及び警報値を設定し、計測値の異常の有無を診断する装置である。
【0026】
回転制御装置3、振動計測装置200及び回転機械状態監視装置300は、コンピュータを所定のプログラムで制御することによって実現できる。この場合のプログラムは、コンピュータのハードウェアを物理的に活用することで、以下に述べるような各部の処理を実現するものである。ハードウェアで処理する範囲、プログラムを含むソフトウェアで処理する範囲をどのように設定するかは、特定の態様には限定されない。たとえば、以下に述べる各部のいずれかを、それぞれの処理を実現する回路として構成することも可能である。
【0027】
また、回転制御装置3、振動センサ100、振動計測装置200、回転機械状態監視装置300は、通信ネットワークN及び送受信部(図示せず)を介して、互いに情報を送受信可能に構成されている。
【0028】
なお、図1において、M1は監視モニター、M2a、M2bはクライアントモニターである。これらの監視モニターM1、クライアントモニターM2a、M2bも、通信ネットワークNに接続されたコンピュータである。監視モニターM1、クライアントモニターM2a、M2bは、回転制御装置3、振動センサ100、振動計測装置200、回転機械状態監視装置300からの情報を受信して、それぞれの出力装置に出力することができる。たとえば、ディスプレイに情報を表示させたり、プリンタにより情報をプリントアウトさせたり、スピーカから音声を出力させたりすることにより、オペレータによる状態監視が可能となる。
【0029】
[B.各部の構成]
[1.振動センサ]
振動センサ100としては、たとえば、振動加速度センサを適用可能である。この振動センサ100は、回転機械2における複数の測定ポイントに取り付けられている。この測定ポイントは、たとえば、電動機の軸受のハウジング部若しくはその近傍とすることが考えられる。ただし、測定ポイントの位置は、これには限定されず、回転機械2の容器、取付(設置、固定)具、配管、取付対象等、電動機の回転に起因する振動を検出可能な場所であればよい。測定ポイントの数、これに対応する振動センサ100の数も、特定数には限定されない。
【0030】
[2.振動計測装置]
振動計測装置200は、信号線を介して振動センサ100に接続されている。この振動計測装置200は、計測制御部210、記憶部220、入力部230、出力部240等を有している。
【0031】
計測制御部210は、計測部211、計測指示部212、計測指示受付部213等を有している。計測部211は、振動センサ100からの信号(たとえば、加速度信号)を計測して、その計測値を記憶部220に記憶する処理部である。計測指示部212は、記憶部220に記憶された計測条件221及び運転パターン222に従って、回転制御装置3による回転機械2の運転及び計測部211による振動計測を制御する処理部である。計測指示受付部213は、回転機械状態監視装置300から受信した計測条件221及び運転パターン222を受け付けて、記憶部220に記憶する処理部である。
【0032】
ここで「計測条件221」とは、振動センサ100により振動を計測する際の各種の条件をいう。たとえば、サンプリングレート、測定レンジ等は、計測条件221に含まれるものとする。サンプルレートとは、検出値をデジタルデータとして取り込む1秒当たりの回数を意味する。測定レンジとは、測定できる加速度の最大値のレベルを意味する。
【0033】
「運転パターン222」は、回転機械2の電動機を運転する各種のパターンをいう。たとえば、回転数、負荷パターン等は、運転パターン222に含まれるものとする。振動計測装置200は、上記のような運転パターン222、計測条件221を適宜変更して、振動計測を行うことができる。これにより、後述するテーブル及び適切な警報値の設定が可能となる。
【0034】
記憶部220は、計測条件221、運転パターン222、計測値223、設定値224等の、計測制御部210の処理に必要な情報を記憶する構成部である。なお、計測値223は、振動センサ100からの信号に基づいて計測部211が計測した値である。また、設定値224は、演算式、パラメータ、しきい値等、計測制御部210の処理に必要な各種の設定に関する値である。
【0035】
入力部230は、計測制御部210の処理に必要な情報の入力、処理の選択や指示を入力する構成部である。この入力部230としては、たとえば、キーボード、マウス、タッチパネル(表示装置に構成されたものを含む)、スイッチ等が考えられる。但し、現在又は将来において利用可能なあらゆる入力装置を含む。
【0036】
出力部240は、測定結果、計測条件221、運転パターン222、テーブル、警報値、診断結果、異常発生等を、オペレータ等が認識可能となるように出力する構成部である。この出力部240としては、たとえば、表示装置、プリンタ、スピーカ、ブザー等が考えられる。但し、現在又は将来において利用可能なあらゆる出力装置を含む。
【0037】
なお、振動計測装置200としては、図1に示すように、設置型のものや、携帯型のものも適用可能である。携帯型の振動計測装置200としては、現在又は将来において利用可能な小型の情報端末が利用可能である。たとえば、PDA(Personal Digital Assistant)を、振動計測装置200に適用することができる。また、振動計測装置200による計測の対象となる回転機械2の数、接続される振動センサ100の数は、特定の数には限定されない。
【0038】
たとえば、図1においては、携帯型の振動計測装置200は単一の回転機械2、単一の振動センサ100からの計測値を計測している。また、設置型の振動計測装置200は、複数の回転機械2、複数の振動センサ100からの計測値を、同時又は異なるタイミングで計測できるものとしている。ただし、これは一例に過ぎず、回転機械2の数、振動センサ100の数は、携帯型か設置型かを問わず、振動計測装置200の処理能力等に応じて決定すればよい。
【0039】
[3.回転機械状態監視装置]
回転機械状態監視装置300は、解析診断部310、記憶部320、入力部330、出力部340等を有している。
【0040】
[3−1.解析診断部]
解析診断部310は、(1)計測指示部311、(2)計測値受付部312、(3)解析部313、(4)キャリア信号抑制部314、(3)正規化処理部315、(5)診断部316等を有している。
【0041】
(1)計測指示部
計測指示部311は、計測条件設定部311a、運転パターン設定部311b、計測指示出力部311c等を有している。計測条件設定部311aは、振動計測装置200が計測する際の計測条件221を設定する処理部である。運転パターン設定部311bは、振動計測装置が計測する際の、回転機械2の運転パターン222を設定する処理部である。計測指示出力部311cは、振動計測装置200に対して、設定された計測条件221及び運転パターン222を含む計測指示を出力する処理部である。
【0042】
(2)計測値受付部
計測値受付部312は、振動計測装置200から受信した計測値を受け付け、記憶部320に記憶する処理部である。
【0043】
(3)解析部
解析部313は、振動解析部313a、キャリア信号レベル判定部313b、振動レベル判定部313c等を有している。振動解析部313aは、計測値に基づいて周波数毎のレベルによる振動波形(たとえば、振動加速度波形)を求める処理部である。これは、上記のFET解析によるパワースペクトルレベルとすることができる。
【0044】
キャリア信号レベル判定部313bは、振動解析部313aによる解析結果である振動波形に基づいて、キャリア信号レベルを判定する処理部である。たとえば、運転パターンに設定されたキャリア周波数に対応する付近の成分およびその高調波成分から、キャリア信号成分を判定し、そのピークレベルを判定することができる。
【0045】
振動レベル判定部313cは、振動波形から、後述するフィルタ処理によりキャリア周波数成分を除去することにより、振動レベルを判定する処理部である。たとえば、所定帯域を含むレベルの代表値を求める。この代表値としては、たとえば、実効値とすることが考えられる。以上のような解析部313による解析結果についても、記憶部320に記憶される。
【0046】
ここで、図3に、インバータ駆動の場合(キャリア周波数12kH、4kH)に、フィルタ処理で加工した(帯域遮断済み)振動波形から、振動レベル(実効値)を求めた結果を示す。図中右側は、図18と同様に、商用電源駆動の場合の振動レベルを示している。図3では、インバータ駆動の場合であっても、フィルタ処理を行うことにより、振動レベルが、商用電源駆動の結果とほぼ同じ結果となることがわかる。
【0047】
(4)キャリア信号抑制部
キャリア信号抑制部314は、フィルタ設定部314a、フィルタ処理部314b等を有している。フィルタ設定部314aは、振動波形から、キャリア信号成分を取り除くためのフィルタを設定する処理部である。フィルタ処理部314bは、設定されたフィルタにより、キャリア信号に対応する帯域の成分を、振動波形から除去する処理部である。フィルタ処理部314bにおけるフィルタの遮断特性は、キャリア周波数に応じて、あらかじめ複数用意しておき、フィルタ設定部314aにより、適宜選択されるようにすることができる。
【0048】
ここで、図4に、一般的なフィルタの構成を示す。フィルタには、(A)高域通過フィルタ、(B)低域通過フィルタ、(C)帯域遮断フィルタ、(D)帯域通過フィルタの4種類がある。本実施形態では、たとえば、帯域遮断フィルタを使用する。図5に、振動波形から、帯域遮断フィルタで取り除かれるキャリア周波数12[kHz]の信号を示す。また、図6に、振動波形から帯域遮断フィルタで取り除かれる4[kHz]及び8[kHz]の信号を示す。
【0049】
なお、上記のフィルタ処理は、帯域遮断フィルタではなく、高域通過、低域通過フィルタを組み合わせても、同様の効果を得ることができる。フィルタは、アナログフィルタ、デジタルフィルタいずれでも同じ結果が得られるので、どちらを使用しても構わない。
【0050】
(5)正規化処理部
正規化処理部315は、テーブル作成部315a、警報値設定部315b等を有している。テーブル作成部315aは、各種の運転パターンで運転して得られた振動レベルと、その際のキャリア信号レベルとを関連付けたテーブルを作成する処理部である。警報値設定部315bは、キャリア信号レベルで振動レベルを正規化して、このレベルで警報値を設定する処理部である。このようなテーブル作成部315a及び警報値設定部315bによる処理を、より具体的に詳説する。
【0051】
(負荷とキャリア信号レベルとの関係)
まず、図7に、回転機械2が有する電動機を、回転制御装置3に含まれるインバータ部により、負荷条件を変えて駆動した場合の振動加速度について、振動解析部313aが解析した振動波形の一例を示す。図7において、横軸は周波数(10kH〜14kH)、縦軸は振動レベルであり、無負荷の場合を実線、負荷有りの場合を点線で示している。無負荷の場合と負荷有りの場合とを比較すると、それぞれのピークに対応するキャリア信号の周波数帯域については、変化はない。しかし、キャリア信号レベル判定部313bが判定するキャリア信号のピークレベルは、負荷条件(負荷の有無)で大きく異なっていることがわかる。これは電動機側の負荷電流とインバータキャリア信号レベルが関係している。負荷増に応じて、キャリア信号レベルを上げて駆動する必要があるからである。
【0052】
(負荷と振動レベルとの関係)
そして、電動機の場合、負荷増によりシャフトにかかる力が増えるため、それを支える軸受側の振動レベルも上がることは、容易に推察できる。図8に、負荷の有無に応じた共振部分の周波数レベルについて、振動解析部313aにより解析した結果の一例を示す。図8において、横軸は周波数(0kH〜10kH)、縦軸は振動レベルであり、無負荷の場合を実線、負荷有りの場合を点線で示している。図8から明らかなように、負荷増に応じて共振成分が増え、振動レベルは変動(増加)している。ここで、上記のように、負荷増に応じて、キャリア信号レベルは増大している。このため、図7に示したように、負荷増に応じて、振動解析部313aが解析する振動波形において、キャリア周波数成分のピークレベルも増大する。したがって、キャリア信号レベル判定部313bがキャリア周波数成分のピークレベルを判定することにより、振動レベルの中の負荷の変動分を推定するすることができる。
【0053】
(テーブル作成処理)
回転制御装置3のインバータ部が、回転機械2の電動機の回転数を変化させて運転する場合のキャリア周波数を設定した運転パターン222の一例を、図9に示す。図9において、横軸が時間、縦軸が回転数及びキャリア周波数であり、実線が回転数、点線がキャリア周波数を示している。インバータ本来の機能から、キャリア周波数の昇降に応じて、回転数も昇降する。キャリア周波数を変化させた場合、回転数は徐々に上昇若しくは下降する。一定のキャリア周波数を維持することにより、回転数を一定の値に安定させることができる。ただし、後述のように、同じ回転数でも、負荷パターンは変動する。また、任意の回転数で電動機を駆動し、負荷を変動させた場合に作成される振動レベルとキャリア信号レベルとの関係を模式的に示した一例を、図10に示す。図10は、横軸が、キャリア信号レベル判定部313bが判定したキャリア信号レベルであり、縦軸が、振動レベル判定部313cが判定した加速度OA値(振動レベル)である。この加速度OA値は、フィルタ処理部314bが、キャリア周波数成分を削除した値である。図10には、このようなキャリア信号レベルと加速度OA値から求めた近似曲線を実線で示している。近似曲線は、線形、対数、指数、累乗、多項式などより近似し易い曲線を用いればよい。
【0054】
本実施形態においては、テーブル作成部315aが、上記のように振動レベルとキャリア信号レベルとの関係を、近似曲線により求め、これを回転数毎にテーブル化する。たとえば、ファン、ポンプでは、同じ回転数でも、しばしば負荷パターンが変動する。上記のように、負荷の変動に応じて、振動レベルは変化するため、同じ回転数による運転において、種々の負荷パターンによる種々の振動レベルを得ることができる。テーブル作成部315aは、この振動レベルとキャリア信号レベルとを関連づけてテーブル化するので、回転数毎に、異なる負荷パターンに対する振動レベルを、あらかじめ求めておくことができる。
【0055】
(警報値設定の問題)
警報値は、回転数毎の振動レベルを基準として設定することが一般的である。しかしながら、この場合、運転負荷条件の変動によるばらつきが発生するため、設定された警報値が必ずしも適切ではない場合が生じていた。たとえば、警報値が変動の下側で設定されると、早くから警報を発生させてしまうことになる。また、警報値が変動の上側で設定されると、警報タイミングが遅れることになる。つまり警報値の設定において、負荷条件の変動を考慮できないということになる。
【0056】
(警報値設定処理)
本実施形態においては、警報値設定部315bが、図10に示したような近似曲線から、負荷変動に応じた振動レベルの変動を考慮した警報値を設定する。たとえば、図10では、近似曲線の値をN1倍した値を注意領域とし、更にN2倍(N1<N2)した値を危険領域の警報値とする。注意領域未満の領域は正常領域であり、正常領域以上、危険領域未満の領域が、警報が不要な変動領域となる。本実施形態では、上記のような警報値の設定により、警報が不要な振動レベルの変動幅を考慮して、回転数毎にキャリア信号レベルで振動レベルを正規化している。このため、たとえば、図11の振動レベル(加速度レベル)の変動領域に示すように、回転数[rpm]毎に、負荷変動により生じる振動レベルの変動分を考慮して、警報値を設定することができる。上記のテーブル及び警報値は、記憶部320に記憶される。以上のように、警報値の設定処理を回転機械の初期条件として登録することにより、より正確な状態監視が可能になる。
【0057】
[診断部]
診断部316は、異常判定部316a、警報出力部316b等を有している。異常判定部316aは、設定された警報値に基づいて、計測された振動レベルから、回転機械2の異常を判定する処理部である。たとえば、図11における変動領域から外れる値が検出された場合を、異常と判断することができる。なお、警報値は、上記のように、負荷条件の変動に起因する振動レベルの変動幅を考慮して設定されている。このため、異常判定部316aは、振動レベルが変動領域に収まっている場合、負荷条件の変動に起因する振動と判定することができる。また、振動レベルが変動領域から外れている場合、機械的変化(劣化、摩耗等)によるものと判定することができる。警報出力部316bは、異常と判定された場合に、警報を出力する処理部である。たとえば、異常を知らせる情報(たとえば、文字、画像、音声等)を、後述する出力部340若しくは通信ネットワークNに出力することができる。
【0058】
[記憶部]
記憶部320は、回転機械状態監視装置300において必要な情報を記憶する構成部である。この記憶部320は、計測条件記憶部321、運転パターン記憶部322、計測値記憶部323、解析結果記憶部324、テーブル記憶部325、警報値記憶部326、設定記憶部327等を有している。
【0059】
計測条件記憶部321は、計測指示部311における計測条件設定部311aが設定する計測条件221を、あらかじめ記憶する記憶部である。運転パターン記憶部322は、運転パターン設定部311bが設定する運転パターン222を、あらかじめ記憶する記憶部である。
【0060】
計測値記憶部323は、計測値受付部312が受け付けた計測値223を記憶する記憶部である。解析結果記憶部324は、解析部313による解析結果を記憶する記憶部である。解析結果には、振動解析部313aにより解析された振動波形、キャリア信号レベル判定部313bにより判定されたキャリア信号レベル、振動レベル判定部313cにより判定された振動レベル等が含まれる。テーブル記憶部325は、テーブル作成部315aにより作成されたテーブルを記憶する記憶部である。警報値記憶部326は、警報値設定部315bにより設定された警報値を記憶する記憶部である。
【0061】
設定記憶部327は、解析診断部310の処理に必要な演算式、パラメータ、しきい値等、各種の設定を記憶する処理部である。上記のような記憶部320に記憶される情報は、あらかじめ後述する入力部330から入力されたもの、通信ネットワークNを介して入力されたものを用いることができる。
【0062】
[入力部]
入力部330は、回転機械状態監視装置300の処理に必要な情報の入力、処理の選択や指示を入力する構成部である。この入力部330としては、現在又は将来において利用可能なあらゆる入力装置を含むことは、入力部230と同様である。
【0063】
[出力部]
出力部340は、測定結果、計測条件221、運転パターン222、テーブル、警報値、診断結果、異常発生等を、オペレータ等が認識可能となるように出力する構成部である。この出力部340としては、現在又は将来において利用可能なあらゆる出力装置を含むことは、出力部240と同様である。なお、上記のような情報を画面上に表示させる他、メールとして生成して送信する機能を持たせてもよい。たとえば、出力部が、異常発生をメールで配信してもよい。
【0064】
[C.作用]
以上のような本実施形態の作用を説明する。なお、以下に述べる各部の処理を、コンピュータ若しくは電子回路により実行する方法、各部の処理をコンピュータに実行させるプログラム及びプログラムを記録した記録媒体も、実施形態の一態様である。
【0065】
[テーブルの作成と警報値の設定]
まず、テーブルの作成と警報値の設定について、図12のフローチャートを参照して説明する。計測条件設定部311aは、計測条件記憶部321に記憶された計測条件221に基づいて、計測条件221を設定する(ステップS01)。運転パターン設定部311bは、あらかじめ運転パターン記憶部322に記憶された運転パターン222に基づいて、初期の運転パターン222を設定する(ステップS02)。なお、入力部330からの入力に応じて、計測条件設定部311a及び運転パターン設定部311bが、計測条件221及び運転条件を設定してもよい。そして、計測指示出力部311cは、設定された計測条件221及び運転パターン222を含む計測指示を、振動計測装置200に出力する(ステップS03)。
【0066】
計測制御部210の計測指示受付部213は、上記の計測指示を受け付けて、その計測指示を記憶部220に記憶する。回転制御装置3は、計測制御部210が受け付けた運転パターン222に従って、回転機械2の回転を制御する。なお、運転パターン222は、回転機械状態監視装置300から回転制御装置3に送信されて読み込まれる態様であっても、あらかじめ回転制御装置3の記憶部に記憶されたものを用いる態様であってもよい。
【0067】
計測指示部212は、受け付けた計測条件221に従って、計測部211による計測を指示する。計測部211は、振動センサ100から、運転中の回転機械2の振動信号を検出する。検出された振動信号は、計測値として記憶部220に記憶されるとともに、回転機械状態監視装置300に出力される。
【0068】
計測値受付部312は、入力された計測値を受け付けて、計測値記憶部323に記憶する(ステップS04)。振動解析部313aは、この計測値に基づいて、振動信号の波形を求める(ステップS05)。キャリア信号レベル判定部313bは、振動解析部313aにより求めた振動波形に基づいて、キャリア信号のレベルを判定する(ステップS06)。
【0069】
また、フィルタ設定部314aは、キャリア成分の除去に必要なフィルタを設定する(ステップS07)。フィルタ処理部314bは、設定されたフィルタによるフィルタ処理を行う(ステップS08)。振動レベル判定部313cは、フィルタ処理された信号に基づいて、振動レベルを判定する(ステップS09)。このような解析部313による解析結果は、解析結果記憶部324に記憶される(ステップS10)。
【0070】
運転パターン設定部311bは、次の運転パターン222がある場合には(ステップS11のYES)、新たな運転パターン222を設定し(ステップS02)、上記の処理を繰り返す(ステップS03〜S10)。すべての運転パターン222による運転がなされた場合(ステップS11のNO)、テーブル作成部315aは、解析結果記憶部324に記憶された解析結果に基づいて、テーブルを作成する(ステップS12)。テーブル記憶部325は、作成されたテーブルを記憶する(ステップS13)。警報値設定部315bは、作成されたテーブルに基づいて、警報値を設定する(ステップS14)。警報値記憶部326は、設定された警報値を記憶する(ステップS15)。
【0071】
[異常判定]
次に、回転機械2の運転中における異常判定について、図13のフローチャートを参照して説明する。まず、回転制御装置3により、回転機械2が運転されると、振動センサ100により検知された振動信号が、計測部211により、計測値が計測される。ここで、テーブル及び警報値の設定のためではなく、実際の運用のための運転における計測値を、実測値とする。この実測値は、計測部211により、回転機械状態監視装置300に出力される。
【0072】
計測値受付部312は、実測値を受け付けて(ステップS21)、計測値記憶部323に記憶する(ステップS22)。振動解析部313aは、実測値に基づいて、振動波形を求める(ステップS23)。キャリア信号レベル判定部313bは、振動波形からキャリア成分のレベルを判定する(ステップS24)。
【0073】
フィルタ設定部314aは、キャリア成分を除去するのに必要なフィルタを設定する(ステップS25)。フィルタ処理部314bは、設定されたフィルタによるフィルタ処理を行う(ステップS26)。振動レベル判定部313cは、フィルタ処理された信号に基づいて、振動レベルを判定する(ステップS27)。このような解析部313による解析結果を、解析結果記憶部324が記憶する(ステップS28)。
【0074】
診断部316の異常判定部316aは、実測値から得られた振動レベルと、警報値記憶部326に記憶された警報値とを比較して、異常の有無を判定する(ステップS29)。異常判定部316aにより、異常ありと判定された場合には(ステップS30のYES)、警報出力部316bが警報を出力する(ステップS31)。異常がなければ(ステップS30のNO)、警報の出力はなされない。
【0075】
[D.効果]
以上のような本実施形態の効果は、以下の通りである。
振動波形に対して、フィルタ処理を用意することにより、キャリア信号が混在した振動波形であっても、その影響を抑制し、商用電源駆動時と同様の振動レベルによる診断を行うことができる。
【0076】
運転パターンを種々変更し、それぞれの振動レベルとキャリア信号レベルを正規化したテーブルを作成するので、負荷変動による振動レベルの変動によるばらつきを考慮した警報値を設定することができる。このため、実測値から求めた振動レベルの変動が、負荷変動による変動か、機械の損傷による変動かを、正確に判断することができる。これは、特に、回転数・負荷が絶えず変動する、ファン・ポンプなどに加え、電車などの車両、エレベータ、エスカレータ、輸送機器全般の振動状態監視に有効である。
【0077】
以上により、回転機械の状態監視の合理的な運用が可能になり、回転機械の異常の有無の監視が容易となる。また、回転機械損傷事故の未然防止につながる。これに加えて、警報設定を自動化するので、監視員の負担軽減を図ることができる。
【0078】
[E.他の実施形態]
本実施形態は上記の態様には限定されない。
(1)フィルタ設定部により選択されるフィルタ処理部として、テーブルにおけるキャリア信号レベル毎に、フィルタを用意してもよい。また、フィルタ設定部により設定するフィルタの遮断帯域については、フィルタ設定部が、キャリア周波数成分をその都度判定して決定してもよい。
(2)代表値としては、実効値の中央値又は平均値、オーバーオール値、ピーク値、絶対値平均値、その他の振動レベルを代表する値でも構わない。また、代表値として、たとえば、歪度、波形率、波高率などの兆候パラメータを用いてもよい。
(3)上記の態様では、テーブル及び警報値の設定にあたり、運転パターン、特に、回転数を変えた運転を行ったが、他の運転パターンを種々変更して運転を行ってもよい。また、計測条件を、種々変更して運転を行ってもよい。
【0079】
(4)上記の各処理部、記憶部等は、共通のコンピュータにおいて実現してもよいし、通信ネットワークで接続された複数のコンピュータによって実現してもよい。各装置における記憶部を共通化してもよいし、分散配置してもよい。
【0080】
(5)上記の各記憶部は、典型的には、内蔵された若しくは外部接続された各種メモリ、ハードディスク、光ディスク等により構成できるが、現在又は将来において利用可能なあらゆる記憶媒体を利用可能である。演算に用いるレジスタ等も、記憶部として捉えることができる。すでに情報が記憶された記憶媒体を、読み取り装置に装着することにより、記憶内容を各種の処理に利用可能となる態様でもよい。記憶の態様も、長時間記憶が保持される態様のみならず、処理のために一時的に記憶され、短時間で消去若しくは更新される態様も含まれる。
【0081】
(6)通信ネットワークは、情報の送受信が可能な伝送路を広く含む。伝送路としては、有線若しくは無線のあらゆる伝送媒体を適用可能であり、どのようなLANやWANを経由するかは問わない。通信プロトコルについても、現在又は将来において利用可能なあらゆるものを適用可能である。
【0082】
(7)実施形態に用いられる情報の具体的な内容、値は自由であり、特定の内容、数値には限定されない。実施形態において、値(たとえば、警報値)に対する計測値の大小判断、一致不一致の判断等において、以上、以下として値を含めるように判断するか、より大きい、より小さい、未満として値を含めないように判断するかも自由である。したがって、たとえば、値の設定によっては、「以上」を「より大きい」、「以下」を「より小さい」「未満」と読み替えても、実質的には同じである。
【0083】
(8)本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0084】
1…回転機械状態監視システム
2…回転機械
3…回転制御装置
100…振動センサ
210…計測制御部
211…計測部
212…計測指示部
213…計測指示受付部
230…入力部
240…出力部
300…回転機械状態監視装置
310…解析診断部
311…計測指示部
311a…計測条件設定部
311b…運転パターン設定部
311c…計測指示出力部
312…計測値受付部
313…解析部
313a…振動解析部
313b…キャリア信号レベル判定部
313c…振動レベル判定部
314…キャリア信号抑制部
314a…フィルタ設定部
314b…フィルタ処理部
315…正規化処理部
315a…テーブル作成部
315b…警報値設定部
316…診断部
316a…異常判定部
316a…警報出力部
321…計測条件記憶部
322…運転パターン記憶部
323…計測値記憶部
324…解析結果記憶部
325…テーブル記憶部
326…警報値記憶部
327…設定記憶部
230,330…入力部
240,340…出力部
【特許請求の範囲】
【請求項1】
インバータにより駆動される回転機械の振動の計測値を記憶する計測値記憶部と、
前記計測値に基づいて、振動波形を求める振動解析部と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する振動レベル判定部と、
を有することを特徴とする回転機械状態監視装置。
【請求項2】
前記振動波形に基づいて、前記キャリア信号のレベルを判定するキャリア信号レベル判定部と、
前記回転機械を複数の運転パターンで運転した場合において、前記キャリア信号レベルと前記振動レベルとを関連づけたテーブルを作成するテーブル作成部を有することを特徴とする請求項1記載の回転機械状態監視装置。
【請求項3】
前記テーブルにおける振動レベルに基づいて、前記回転機械の振動の異常を判定するための警報値を設定する警報値設定部を有することを特徴とする請求項2記載の回転機械状態監視装置。
【請求項4】
前記警報値に基づいて、前記振動レベル判定部により判定された振動レベルが異常か否かを判定する異常判定部を有することを特徴する請求項3記載の回転機械状態監視装置。
【請求項5】
コンピュータ又は電子回路が、
インバータにより駆動される回転機械の振動の計測値を記憶する処理と、
前記計測値に基づいて、振動波形を求める処理と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する処理と、
を行うことを特徴とする回転機械状態監視方法。
【請求項6】
コンピュータに、
インバータにより駆動される回転機械の振動の計測値を記憶する処理と、
前記計測値に基づいて、振動波形を求める処理と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する処理と、
を実行させることを特徴とする回転機械状態監視プログラム。
【請求項7】
請求項1〜4のいずれか1項に記載の前記回転機械状態監視装置と、
前記回転機械状態監視装置に接続されるとともに、前記回転機械の振動を検知するセンサに接続された振動計測装置と、
を有することを特徴とする回転機械状態監視システム。
【請求項1】
インバータにより駆動される回転機械の振動の計測値を記憶する計測値記憶部と、
前記計測値に基づいて、振動波形を求める振動解析部と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理を行うフィルタ処理部と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する振動レベル判定部と、
を有することを特徴とする回転機械状態監視装置。
【請求項2】
前記振動波形に基づいて、前記キャリア信号のレベルを判定するキャリア信号レベル判定部と、
前記回転機械を複数の運転パターンで運転した場合において、前記キャリア信号レベルと前記振動レベルとを関連づけたテーブルを作成するテーブル作成部を有することを特徴とする請求項1記載の回転機械状態監視装置。
【請求項3】
前記テーブルにおける振動レベルに基づいて、前記回転機械の振動の異常を判定するための警報値を設定する警報値設定部を有することを特徴とする請求項2記載の回転機械状態監視装置。
【請求項4】
前記警報値に基づいて、前記振動レベル判定部により判定された振動レベルが異常か否かを判定する異常判定部を有することを特徴する請求項3記載の回転機械状態監視装置。
【請求項5】
コンピュータ又は電子回路が、
インバータにより駆動される回転機械の振動の計測値を記憶する処理と、
前記計測値に基づいて、振動波形を求める処理と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する処理と、
を行うことを特徴とする回転機械状態監視方法。
【請求項6】
コンピュータに、
インバータにより駆動される回転機械の振動の計測値を記憶する処理と、
前記計測値に基づいて、振動波形を求める処理と、
前記振動波形から、インバータのキャリア信号の周波数成分を除去するフィルタ処理と、
前記フィルタ処理を行った振動波形に基づいて、振動レベルを判定する処理と、
を実行させることを特徴とする回転機械状態監視プログラム。
【請求項7】
請求項1〜4のいずれか1項に記載の前記回転機械状態監視装置と、
前記回転機械状態監視装置に接続されるとともに、前記回転機械の振動を検知するセンサに接続された振動計測装置と、
を有することを特徴とする回転機械状態監視システム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−29484(P2013−29484A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−167705(P2011−167705)
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]