
回転機軸受診断装置
【課題】回転機の軸受診断を行う場合、外乱振動波形による影響によって正確な診断が困難であった。
【解決手段】モータにより駆動される回転機の機器仕様データベースと、軸受の振動波形を格納する振動波形データベースと、包絡線処理手段と、間引き処理手段と、FFT解析手段と、特徴周波数抽出手段と、波形分布処理手段と、特徴周波数抽出結果並びに波形分布結果から判定基準を算出する判定基準算出手段と、判定基準データベースと、特徴周波数抽出結果に対して判定基準を用いて判定する判定手段とを有する。
【解決手段】モータにより駆動される回転機の機器仕様データベースと、軸受の振動波形を格納する振動波形データベースと、包絡線処理手段と、間引き処理手段と、FFT解析手段と、特徴周波数抽出手段と、波形分布処理手段と、特徴周波数抽出結果並びに波形分布結果から判定基準を算出する判定基準算出手段と、判定基準データベースと、特徴周波数抽出結果に対して判定基準を用いて判定する判定手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータにより駆動されるポンプなどの回転機の軸受診断装置に関する。
【背景技術】
【0002】
一般にポンプなどのモータによって駆動される回転機において、異常が発生する確率が高い箇所としては軸受部分があげられる。このため、定期的に軸受部分の振動を監視し、異常診断装置を使用しで監視対象である軸受の周波数のみを検出する方法が用いられている。また、軸受診断装置において、正常値の実効値及び最大値を基準とした判定基準や波形の尖度や歪度などの統計量による判定方法を利用して異常判定を行っている。
【0003】
しかしながら、ポンプ、モータなどの軸受診断を行う場合には、軸受付近に振動センサを取り付け、振動測定を行いFFT解析を行うことが一般的であるが、軸受にモータや回転機からの振動が伝播し、その周波数がFFT解析の結果として現われる。このため、モータや回転機から発生する理論周波数を考慮し外乱部分を除外してスムーズに軸受診断ができるようになることが課題である。
【0004】
また、特許文献1には、軸受の傷の有無を診断する技術が開示されており、軸受を内輪、外輪、転動体、保持器に分けてそれぞれの基本周波数を算出し、この基本周波数と比較して異常を診断する技術である。しかしながら、この診断技術によっては、軸受の内輪、外輪、転動体、保持器のいずれの部位においてもエンベロープ処理を実施して得られるエンベロープデータを利用して診断を行っており、精度の高い識別診断には困難が伴う。
【0005】
更に、特許文献2には、回転機軸受診断装置に関し、振動信号を用いた簡易診断と精密診断を行うシステムが示されており、簡易診断では、包絡線処理により得られるピーク値により異常の有無を診断し、精密診断では、更にFFT処理により特徴周波数を抽出して診断を行うことが示されている。しかしながら、この診断技術においては、異常分類機能、平均値・標準偏差算出機能、その他、更に改善された各種機能、構成などの開示は認められない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−202276号公報
【特許文献2】特開2001−255241号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記した従来技術の課題を解決するためになされたもので、簡単な構成で精度の高い診断を可能とした回転機軸受診断装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の請求項1に係わる回転機軸受診断装置は、モータにより駆動される回転機の仕様情報を格納する機器仕様データベースと、前記回転機の軸受の振動波形を格納する振動波形データベースと、前記振動波形を包絡線処理する包絡線処理手段と、前記振動波形から指定した点数毎にデータを間引いてサンプリング振動波形を作成する間引き処理手段と、前記振動波形、前記包絡線処理波形並びに前記間引き処理波形を高速フーリエ解析するFFT解析手段と、前記FFT解析手段の解析結果から前記機器仕様に対応した理論周波数の振動成分を抽出する特徴周波数抽出手段と、前記振動波形の分布処理を行う波形分布処理手段と、前記特徴周波数抽出結果並びに前記波形分布結果から判定基準を算出する判定基準算出手段と、この判定基準算出手段にて算出された判定基準を格納する判定基準データベースと、前記特徴周波数抽出結果に対して前記判定基準を用いて判定する判定手段とを具備することを特徴とする。
【0009】
本発明の請求項2に係わる回転機軸受診断装置は、前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記判定基準データベースには回転機異常判定基準、モータ異常判定基準並びに軸受異常判定基準が格納されており、前記判定手段は、間引き処理した振動波形のFFT解析結果を前記回転機異常判定基準と比較して前記回転機の異常を判定する回転機異常判定機能、振動波形のFFT解析結果を前記モータ異常判定基準と比較して前記モータの異常を判定するモータ異常判定機能、包絡線処理した振動波形のFFT解析結果を前記軸受異常判定基準と比較して前記軸受の異常を判定する軸受異常判定機能、前記各異常判定結果から前記回転機、前記モータ並びに前記軸受の異常を分類する異常分類機能、及び前記異常分類機能によって軸受異常に分類された場合に前記軸受の各異常個所の判定を行う軸受異常箇所特定機能とを有することを特徴とする。
【0010】
本発明の請求項3に係わる回転機軸受診断装置は、前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記特徴周波数抽出手段は、間引き処理した振動波形のFFT解析結果から前記回転機仕様の周波数の振幅を抽出する回転機特徴抽出機能、振動波形のFFT解析結果から前記モータ仕様の周波数の振幅を抽出するモータ特徴周波数抽出機能並びに包絡線処理した振動波形のFFT解析結果から前記軸受仕様の周波数の振幅を抽出する軸受特徴周波数抽出機能を有し、前記判定基準算出手段は、抽出した周波数の振幅からFFT解析回数分の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする。
【0011】
本発明の請求項4に係わる回転機軸受診断装置は、前記判定基準算出手段は、複数の特徴周波数抽出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする。
【0012】
本発明の請求項5に係わる回転機軸受診断装置は、前記波形分布処理手段は、波形の標準偏差を算出する波形分布標準偏差算出手段、波形の尖度を算出する波形分布尖度算出手段、波形の歪度を算出する波形歪度算出手段を有し、前記判定基準算出手段は、複数の振動波形の標準偏差、尖度、歪度算出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出した判定基準を前記判定基準データベースに格納することを特徴とする。
【発明の効果】
【0013】
回転機の転がり軸受の診断が監視対象から採取したデータから保守員の熟練度に関係なく、異常発生の有無を自動的に得ることができる。このため、異常検知後の対応を迅速に行うことが可能となり、機器の安定運転をサポートするとともに保守費用を削減しプラントのランニングコストの低下に貢献できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態における監視対象の概要を示した図。
【図2】本発明の実施形態のシステム概要を示した図。
【図3】本発明の実施形態の動作を説明するための図。
【図4】本発明の実施形態における正常な転がり軸受の包絡線処理後の波形を示した図。
【図5】図4の波形をFFT解析した出力波形を示す図。
【図6】本発明の実施形態における外輪に傷をつけた転がり軸受の包絡線処理後の波形を示した図。
【図7】図6の波形をFFT解析した出力波形を示す図。
【図8】本発明の実施形態のおける正常な転がり軸受のオリジナル振動波形を示す図。
【図9】図8の波形をFFT解析した出力波形を示す図。
【図10】本発明の実施形態における外輪に傷をつけた転がり軸受のオリジナル振動波形を示す図。
【図11】図10の波形をFFT解析した出力波形を示す図。
【図12】本発明の実施形態における正常な転がり軸受の間引き処理後の出力波形を示す図。
【図13】図12の波形をFFT解析した出力波形を示す図。
【図14】本発明の実施形態における外輪に傷をつけた転がり軸受の間引き処理後の出力波形を示す図。
【図15】図14の波形をFFT解析した出力波形を示す図。
【図16】本発明の実施形態における正常軸受の波形分布を示す図。
【図17】本発明の実施形態における外輪に傷をつけた転がり軸受の波形分布を示す図。
【図18】本発明の実施形態における異常判定機能を説明するための図。
【図19】本発明の実施形態におけるデータベース構成を示す図。
【図20】本発明の実施形態における統計量判定基準を形成する方法を説明するための図。
【図21】本発明の実施形態における変化量による判定基準を形成する方法を説明するための図。
【図22】本発明の実施形態における波形分布による判定基準を形成する方法を説明するための図。
【図23】本発明の実施形態における機器仕様データベースの一部項目の計算式を示す図。
【図24】本発明の実施形態における機器仕様データベースのデータ編集を行う画面例を示す図。
【図25】本発明の実施形態における判定基準データベースのデータ編集を行う画面例を示す図。
【図26】本発明の実施形態における正常な診断結果一覧画面を示す図。
【図27】本発明の実施形態における異常な診断結果一覧画面を示す図。
【図28】本発明の実施形態のシステムフローを示す図。
【発明を実施するための形態】
【0015】
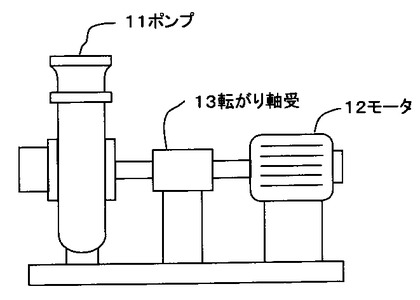
以下に本発明に係る実施形態を図を参照して説明する。図1に以下に説明する具体的な診断対象の機器構成例を示したが、回転機であるポンプ11は駆動源であるモータ12に接続され、転がり軸受13によって回転体が支持されている。このような機器構成にあっては、上述もしたが、異常が発生する確率の高い箇所として転がり軸受13が挙げられる。
【0016】
そこで、この転がり軸受13に図示しない振動計を取付けて、転がり軸受13の異常を監視することになるが、振動計からの出力波形データにはポンプ11、モータ12からの振動も混在して採取されることになる。本発明は、このような機器構成にて各種の振動波形データが混在して採取されても、各構成機器・部品の正常・異常を精度よく検出することを可能としたものである。
【0017】
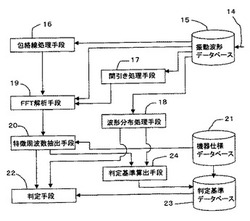
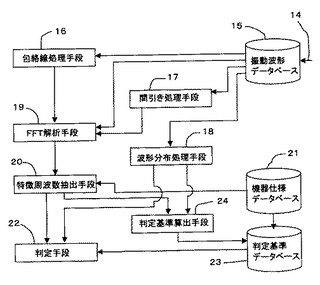
図2は、本発明の実施形態のシステム概要を示したものである。すなわち、矢印で示した転がり軸受13から採取されたオリジナル振動波形データ14は振動波形データベース15に格納される。振動波形データベース15に格納されたオリジナル振動波形データ14は、包絡線処理手段16、間引き処理手段17、波形分布処理手段18並びに高速フーリエ解析するFFT解析手段19へ入力される。
【0018】
FFT解析手段19には、包絡線処理手段16、間引き処理手段17からの出カデータも入力される。FFT解析手段19にて解析された出カデータは特徴周波数抽出手段20に入力される。また、特徴周波数抽出手段20には、機器仕様データベース21が接続されており、このデータベース21に格納されている機器仕様データ、すなわち、ポンプ11、モータ12、転がり軸受13などの機器仕様データが格納されている。
【0019】
特徴周波数抽出手段20並びに波形分布処理手段18からの出カデータは判定手段22に入力され、判定基準データベース23に格納されている判定基準データと比較され各機器の異常の有無が判定される。判定基準データベース23に格納されている判定基準データは、判定基準算出手段24にて算出されるが、判定基準算出にあたっては、波形分布処理手段18並びに特徴周波数抽出手段20からの出カデータが利用される。また、判定基準データベース23には機器仕様データベース21から機器仕様データも入力される。
【0020】
このような図2の構成において、振動波形データベース15に格納された振動波形データは、包絡線処理手段16により包絡線処理された振動波形データと、間引き処理手段17により予め指定された点数ごとに間引きが行われた振動波形データと、採取された状態のオリジナル振動波形データ14の3種類の波形に加工され、FFT解析手段19により各振動波形データがFFT解析される。
【0021】
FFT解析されたデータは、特徴周波数抽出手段20に送られ、機器仕様データベース21に格納されている機器仕様から算出される発生すべき周波数部分の振幅を抽出する。一方、振動波形データベース15の振動波形データは波形分布処理手段18により波形分布の統計処理が行われる。
【0022】
波形分布処理結果は、特徴周波数抽出手段20による処理結果とともに判定基準算出手段24に送られ、判定基準の計算を行い、計算結果が判定基準データベース23に格納される。特徴周波数抽出手段20と波形分布処理手段18の処理結果は判定手段22で判定基準データベース23の判定基準と比較され、転がり軸受の診断が行われる。
【0023】
このような構成によれば、特徴周波数抽出手段20及び波形分布
処理手段18により振動の特徴の数値化を可能とし、判定基準との比較により異常判定が可能となるだけでなく、同一の振動波形データを包絡線処理、間引き処理、波形分布の処理を施すことにより異常事象を分類し転がり軸受以外の異常を区別することが可能となる。
【0024】
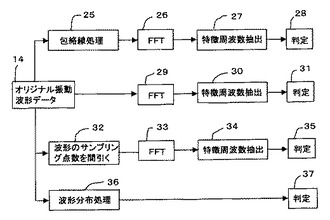
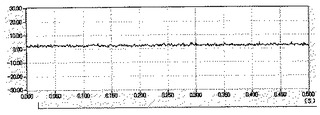
次に、図3を参照して図2に示した処理内容を更に詳細に説明する。すなわち、オリジナル振動波形データ14を包絡線処理25し、FFT解析26を行って特徴周波数抽出処理27を行い判定28に至る。この処理方法によると、転がり軸受仕様の周波数が抽出できる。
【0025】
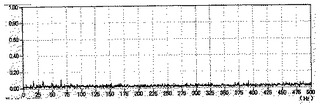
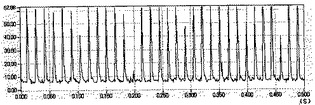
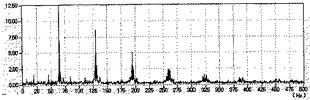
図4には正常な転がり軸受の包絡線処理後の波形を示しており、図5にこの図4の包絡線処理済波形をFFT解析した出力波形を示してある。さて、図6には外輪に傷がある転がり軸受の包絡線処理後の波形を示しており、図7にこの図6の包絡線処理済波形をFFT解析した出力波形を示してある。
【0026】
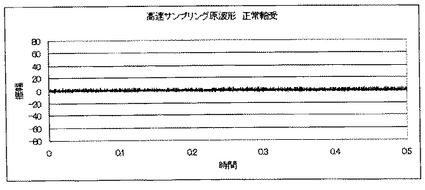
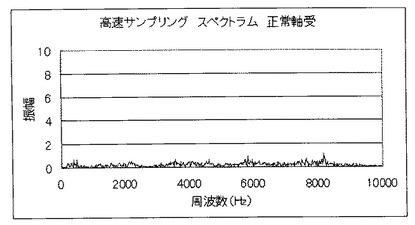
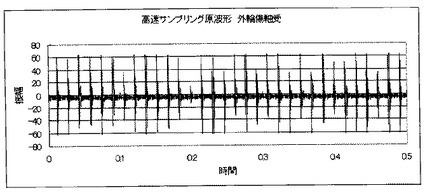
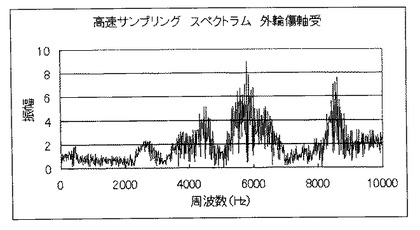
次に、図3のオリジナル振動波形データ14を直接FFT解析29し、特徴周波数抽出30、判定31に至る処理である。この処理方式は、高速サンプリング方式といい、周波数帯域を広げ周波数のメッシュを粗くする方式で、モータの振動診断に好適である。
【0027】
図8は、この高速サンプリング方式にて正常な転がり軸受のオリジナル振動波形データを示すもので、図9は、これをFFT解析した出力波形を示してある。これに対して、図10は、高速サンプリング方式にて外輪に傷がある転がり軸受のオリジナル振動波形データを示すもので、図11には、これをFFT解析した出力波形を示してある。
【0028】
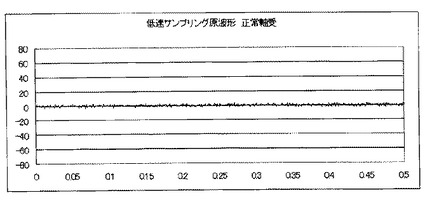
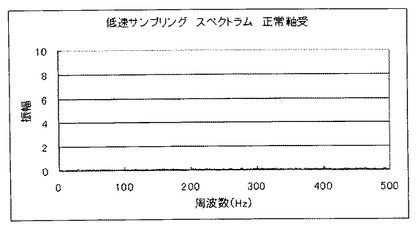
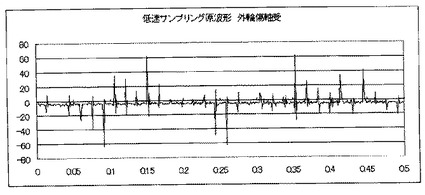
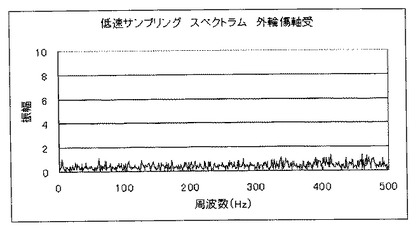
次に、図3のオリジナル振動波形データ14の波形のサンプリング点数を間引く間引き処理32を行った後にFFT解析33を経て特徴周波数抽出34、判定35に至る処理である。この処理方式は低速サンプリング方式といい、周波数帯域を狭くし周波数のメッシュを細かくする方式で回転機の振動診断に好適である。
【0029】
図12はこの低速サンプリング方式にて正常な転がり軸受の間引き処理後の出力波形を示すもので、図13は、これをFFT解析した出力波形を示すものである。図14には、低速サンプリング方式にて外輪に傷がある転がり軸受の間引き処理後の出力波形を示すもので、これに対して図15は、これをFFT解析した出力波形を示すものである。
【0030】
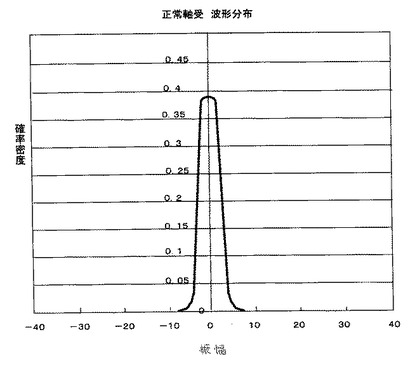
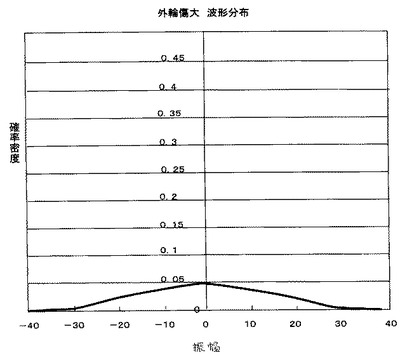
次に、図3にて波形分布処理36の出力結果をもって判定37を行う方式を説明する。この波形分布処理方式は、図3にて上述した包絡線処理25後にFFT解析26を行う方式、オリジナル振動波形データをFFT解析29する方式、波形間引き後にFFT解析を行う方式のいずれにおいても判定結果が異常と出たときに、波形分布処理方式による判定が異常の場合には、モータ並びに回転機は正常で転がり軸受が異常であることを識別するための方式である。図16には、正常軸受の波形分布を示してあり、図17には、外輪に傷がある転がり軸受の波形分布を示してある。いずれも横軸には振幅を縦軸には確率密度を表してある。
【0031】
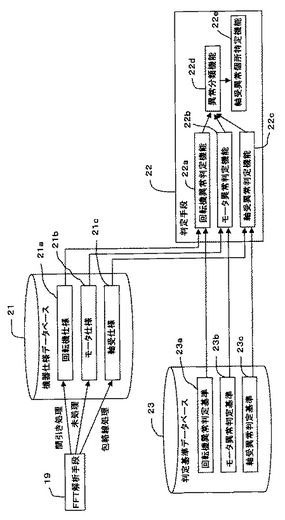
図18には上述した判定に係るデータベースの関係を示す図である。すなわち、FFT解析手段19からは間引き処理、未処理、包絡線処理のそれぞれの出力結果が抽出されるが、これらの出力結果と機器仕様データベース21に格納されている各種仕様データにより得られた出力が判定手段22に入力される。判定手段22では判定基準データベース23に格納されている判定基準と比較して異常
判定がなされる。
【0032】
図18の機器仕様データベース21の回転機仕様21aは間引き処理後のFFT解析結果に反映され、モータ仕様21bは未処理データのFFT解析結果に反映され、軸受仕様21cは包絡線処理データのFFT解析結果にそれぞれ反映されている。そして、図18に示すように、判定基準データベース23の回転機異常判定基準23a、モータ異常判定基準23b、軸受異常判定基準23cに基づいて、判定が行われる。判定手段22には回転機異常判定機能22a、モータ異常判定機能22b、軸受異常判定機能22cが設けられており、これらの機能に基づいて異常分類機能22dが働く。判定手段22には、更に軸受異常個所特定機能22eが設けられている。
【0033】
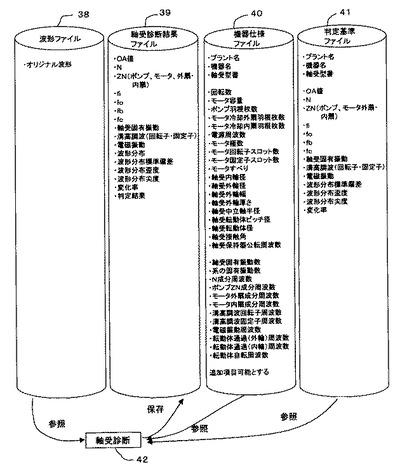
図19には上述した各種データベースなどのファイル構成例を示したものである。すなわち、波形ファイル38は、図1に示した振動波形データベース15を構成するファイルを示したものである。軸受診断結果ファイル39は、診断結果を構成するファイルを示したものである。機器仕様ファイル40は、図1の機器仕様データベース21内のファイル構成を示したものである。判定基準ファイル41は、図1の判定基準データベース23内のファイル構成を示したものである。
【0034】
そして、図19の下方に示してあるように、波形ファイル38のデータに対して機器仕様ファイル40、判定基準ファイル41を参照して軸受診断42を行った結果を軸受診断結果ファイル39に保存されることになる。
【0035】
さて、上述したように軸受の診断を行うにあたっては、判定基準が必要である。以下にこの判定基準の形成方法並びに構成などについて図を参照して説明する。
【0036】
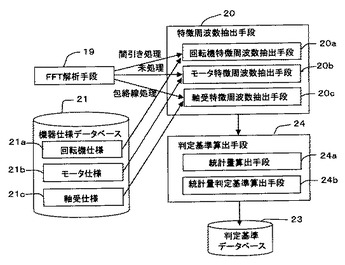
図20は正常データを選択して統計量判定基準を形成する方法を説明するためのブロック図である。FFT解析手段19からのFFT解析結果は、特徴周波数抽出手段20に送られ、間引き処理後のFFT解析結果から機器仕様データベース21に格納されている回転機仕様21aの周波数が抽出され(20a)、直接のFFT解析結果はモータ仕様21bの周波数が抽出され(20b)、包絡線処理後のFFT解析結果から軸受仕様21cの周波数が抽出される(20c)。
【0037】
各機器仕様の周波数が抽出された結果は、判定基準算出手段24に送られ、統計量算出手段24aで複数の特徴値の平均値と標準偏差が算出され、統計量判定基準算出手段24bで平均値+標準偏差×係数の判定基準が算出され、判定基準データベース23に格納される。この判定基準によれば、過去の正常状態のデータによりその機器の特徴に合った判定基準を算出し、転がり軸受の異常を自動で精度よく判定することができる。
【0038】
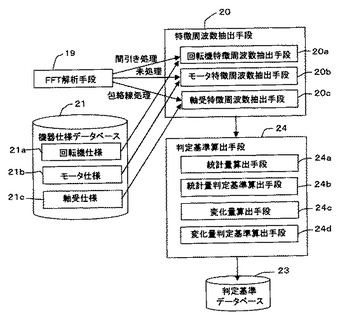
図21は変化量による判定基準を形成する方法を説明するためのブロック図である。FFT解析手段19からのFFT解析結果は、特徴周波数抽出手段20に送られ、間引き処理後のFFT解析結果から機器使用データベース21に格納されている回転機仕様21aの周波数が抽出され(20a)、直接のFFT解析結果はモータ仕様21bの周波数が抽出され(20b)、包絡線処理後のFFT解析結果から軸受仕様21cの周波数が抽出される(20c)。
【0039】
各機器仕様の周波数が抽出された結果は、判定基準算出手段24に送られ、統計量算出手段24aで複数の特徴値の平均値と標準偏差が算出され、統計量判定基準算出手段24bで平均値+標準偏差×係数の判定基準が算出され、変化量算出手段24cで複数データを選択した場合の平均値と標準偏差の時系列の傾きを算出し、変化量判定値算出手段24dで時系列の傾き×係数の変化量判定基準が算出され、判定基準データベース23に格納される。この判定基準によれば、過去の複数のデータによりその機器の特徴と異常の進展速度を数値化することで、機器の特性と異常進展速度に合った転がり軸受の異常を自動で精度よく判定することができる。
【0040】
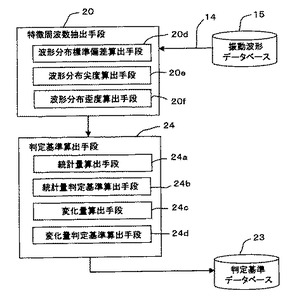
図22は波形分布による判定基準を形成する方法を説明するためのブロック図である。振動波形データベース15からのオリジナル振動波形データ14を特徴周波数抽出手段20の波形分布標準偏差算出手段20dにより波形分布標準偏差を算出し、波形分布尖度算出手段20eにより波形分布尖度を算出し、波形分布歪度算出手段20fにより波形分布歪度を算出する。
【0041】
これらの波形分布データを判定基準算出手段24の統計量算出手段24aにて統計量を算出し、統計量判定基準算出手段24bにより基準値を算出する。また、変化量算出手段24cにより変化量を算出し、変化量判定基準算出手段24dにより基準値を算出して統計量判定基準値とともに判定基準データベース23に格納する。この判定基準によれば、振動波形データの波形分布の判定基準を数値化することができることから、機器仕様から判定できる転がり軸受の異常のほかに例えばグリース切れなど、非定常な軸受異常に対しても異常判定が可能となる。
【0042】
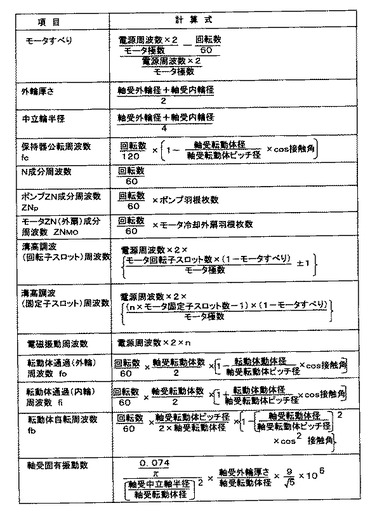
次に機器仕様データベース21の一部項目の計算式を図23に示す。項目としては、モータすべり、外輪厚さ、中立輪半径、保持器公転周波数fc、N成分周波数、ポンプZN成分周波数ZNp、モータZN(外扇)成分ZNMO、溝高調波(回転子スロット)周波数、溝高調波(固定子)周波数など一例を示した。
【0043】
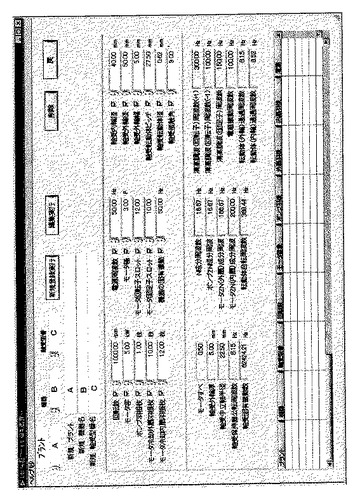
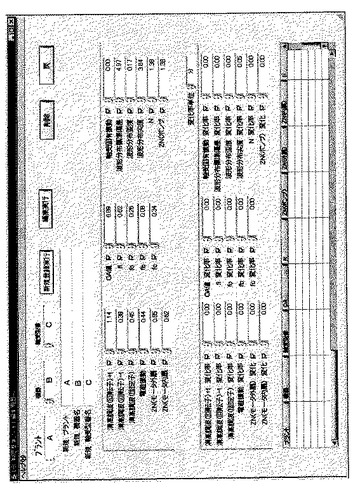
図24は、機器仕様データベース21のデータの編集を行う画面例である。編集するデータベースを選択し、選択する項目は回転数などの機器仕様をプルダウンメニューから選択する。編集を行う項目にレ印を付与すると入力可能となり、機器仕様の追加、削除、変更を行うことができる。同様にして図25は、判定基準データベース23の編集を行う画面例で、図24と同様に判定基準の追加、削除、変更を行うことができる。
【0044】
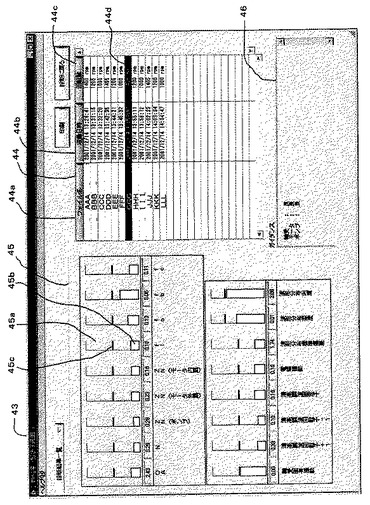
上述したように診断を行った結果を診断結果一覧画面表示43として図26に示すが、この図26は診断結果が正常な例である。すなわち、画面43の右欄上部に収録ファイル一覧44が表示され、ここには診断を行った結果をファイル名44a、収録日時44b、回転数44cが表示される。これらのファイルの内で、診断結果の詳細は表示希望のファイルを選択する。
【0045】
図で黒白反転表示してある黒白反転ファイル44dが選択された項目である。選択された黒白反転ファイル44dの診断結果は、画面左欄に診断結果一覧45として表示される。ここでは、各項目ごとの表示欄45aに棒グラフ45b表示され、図の白抜き表示は画面では緑色表示される。各項目ごとの表示欄には正常/異常の境界ライン45cが全項目の表示欄に表示されている。
【0046】
各項目の棒グラフ45bがこの境界ライン45cに達していない場合には、その項目は正常であることを表しており、棒グラフ45bが境界ライン45cを超えている場合にはその項目は異常であることを表している。図26の例ではいずれも正常であることが分かるが、異常な項目の棒グラフは画面表示では赤色表示がなされる。また、画面の右下にはガイダンス欄46が設けられており、この欄には診断対象の診断結果が簡潔に表示されるようになっている。図の例では、軸受、モータ、ポンプのいずれも「良」であることを表している。
【0047】
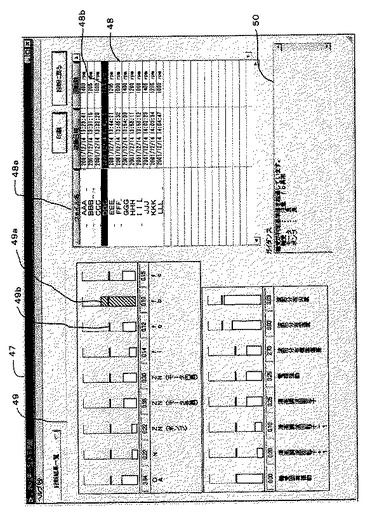
図27には他の診断結果一覧表示画面47を示してある。この例では、診断結果が異常であることを表示しており、収録ファイル一覧48のファイル名48aの中から黒白反転ファイル48bを選択する。このファイル48bは、転動体に傷がある軸受に関する診断データが格納されている。ファイルを選択することによって、診断結果一覧49には診断対象の各機器並びに要素部品ごとの診断結果が棒グラフ表示されている。
【0048】
この表示は図26と同一の表示ルールになっており、白抜きの棒グラフは正常であることを表してある。しかしながら、診断結果一覧49のfbの棒グラフ49aはハッチングで表示してあるが、これは画面では赤色表示になっている。そして、この赤色の棒グラフ49aは正常/異常の境界ライン49bを超えていて、この項目fbは異常であることを表している。項目fbは、図23に示してあるが、転がり軸受の転動体自転周波数を示しており、この棒グラフ49aが赤色表示ということは、項目fbが異常であることを示していることが分かる。
【0049】
また、図27の診断結果一覧表示画面47の右下に設けられているガイダンス欄50には、「軸受が判定基準値を超過しています。」との記述があり、更に、モータ、ポンプについては正常であるが、転がり軸受については注意を要し、特に項目fb、すなわち転動体には異常があることを示している。
【0050】
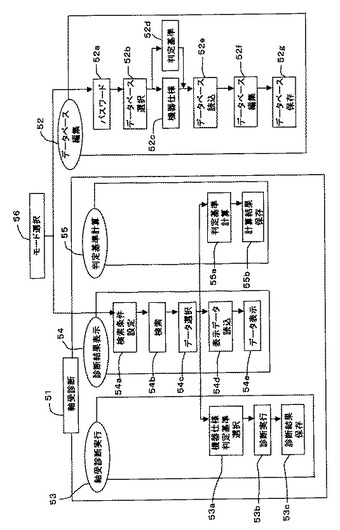
次に本発明に係るシステムフローを図28を参照して説明する。すなわち、システムは、大別して軸受診断フロー51とデータベース編集フロー52から構成されている。軸受診断フロー51は更に軸受診断実行フロー53、診断結果表示フロー54、判定基準計算フロー55から構成されている。軸受診断実行フロー53は、機器仕様判定基準選択ステップ53a、診断実行ステップ53b、診断結果保存ステップ53cから構成されている。診断は、回転機、ポンプ、転がり軸受ごとの機器仕様によって決定される判定基準に基づき実行される。
【0051】
診断結果表示フロー54は、条件設定ステップ54a、検索ステップ54b、データ選択ステップ54c、表示データ読込ステップ54d、データ表示ステップ54eから構成されている。診断結果表示に際しては、図26、図27で説明したように上述の各ステップによってなされる。判定基準計算フロー55は、判定基準計算ステップ55a、計算結果保存ステップ55bから構成されている。
【0052】
データベース編集フロー52は、パスワード設定ステップ52a、データベース選択ステップ52b、機器仕様設定ステップ52c、判定基準設定ステップ52d、データベース読込ステップ52e、データベース編集ステップ52f、データベース保存ステップ52gから構成されている。そして、診断結果表示フロー54、データベース編集フロー52はモード選択56にて選択する方式となっている。
【符号の説明】
【0053】
11…ポンプ、12…モータ、13…軸受、14…オリジナル振動波形データ、15…振動波形データベース、16…包絡線処理手段、17…間引き処理手段、18…波形分布処理手段、19…FFT解析手段、20…特徴周波数抽出手段、21…機器仕様データベース、22…判定手段、23…判定基準データベース、24…判定基準算出手段、25…包絡線処理、26、29、33…FFT解析、27、30、34…特徴周波数抽出処理、28、31、35、37…判定、32…間引き処理、36…波形分布処理、38…波形ファイル、39…軸受診断結果ファイル、40…機器仕様ファイル、41…判定基準ファイル、42…軸受診断、43、47…診断結果一覧画面表示、44、48…収録ファイル一覧、45、49…診断結果一覧、46、50…ガイダンス欄、51…軸受診断フロー、52…データベース編集フロー、53…軸受診断実行フロー、54…診断結果表示フロー、55…判定基準計算フロー。
【技術分野】
【0001】
本発明は、モータにより駆動されるポンプなどの回転機の軸受診断装置に関する。
【背景技術】
【0002】
一般にポンプなどのモータによって駆動される回転機において、異常が発生する確率が高い箇所としては軸受部分があげられる。このため、定期的に軸受部分の振動を監視し、異常診断装置を使用しで監視対象である軸受の周波数のみを検出する方法が用いられている。また、軸受診断装置において、正常値の実効値及び最大値を基準とした判定基準や波形の尖度や歪度などの統計量による判定方法を利用して異常判定を行っている。
【0003】
しかしながら、ポンプ、モータなどの軸受診断を行う場合には、軸受付近に振動センサを取り付け、振動測定を行いFFT解析を行うことが一般的であるが、軸受にモータや回転機からの振動が伝播し、その周波数がFFT解析の結果として現われる。このため、モータや回転機から発生する理論周波数を考慮し外乱部分を除外してスムーズに軸受診断ができるようになることが課題である。
【0004】
また、特許文献1には、軸受の傷の有無を診断する技術が開示されており、軸受を内輪、外輪、転動体、保持器に分けてそれぞれの基本周波数を算出し、この基本周波数と比較して異常を診断する技術である。しかしながら、この診断技術によっては、軸受の内輪、外輪、転動体、保持器のいずれの部位においてもエンベロープ処理を実施して得られるエンベロープデータを利用して診断を行っており、精度の高い識別診断には困難が伴う。
【0005】
更に、特許文献2には、回転機軸受診断装置に関し、振動信号を用いた簡易診断と精密診断を行うシステムが示されており、簡易診断では、包絡線処理により得られるピーク値により異常の有無を診断し、精密診断では、更にFFT処理により特徴周波数を抽出して診断を行うことが示されている。しかしながら、この診断技術においては、異常分類機能、平均値・標準偏差算出機能、その他、更に改善された各種機能、構成などの開示は認められない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−202276号公報
【特許文献2】特開2001−255241号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記した従来技術の課題を解決するためになされたもので、簡単な構成で精度の高い診断を可能とした回転機軸受診断装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の請求項1に係わる回転機軸受診断装置は、モータにより駆動される回転機の仕様情報を格納する機器仕様データベースと、前記回転機の軸受の振動波形を格納する振動波形データベースと、前記振動波形を包絡線処理する包絡線処理手段と、前記振動波形から指定した点数毎にデータを間引いてサンプリング振動波形を作成する間引き処理手段と、前記振動波形、前記包絡線処理波形並びに前記間引き処理波形を高速フーリエ解析するFFT解析手段と、前記FFT解析手段の解析結果から前記機器仕様に対応した理論周波数の振動成分を抽出する特徴周波数抽出手段と、前記振動波形の分布処理を行う波形分布処理手段と、前記特徴周波数抽出結果並びに前記波形分布結果から判定基準を算出する判定基準算出手段と、この判定基準算出手段にて算出された判定基準を格納する判定基準データベースと、前記特徴周波数抽出結果に対して前記判定基準を用いて判定する判定手段とを具備することを特徴とする。
【0009】
本発明の請求項2に係わる回転機軸受診断装置は、前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記判定基準データベースには回転機異常判定基準、モータ異常判定基準並びに軸受異常判定基準が格納されており、前記判定手段は、間引き処理した振動波形のFFT解析結果を前記回転機異常判定基準と比較して前記回転機の異常を判定する回転機異常判定機能、振動波形のFFT解析結果を前記モータ異常判定基準と比較して前記モータの異常を判定するモータ異常判定機能、包絡線処理した振動波形のFFT解析結果を前記軸受異常判定基準と比較して前記軸受の異常を判定する軸受異常判定機能、前記各異常判定結果から前記回転機、前記モータ並びに前記軸受の異常を分類する異常分類機能、及び前記異常分類機能によって軸受異常に分類された場合に前記軸受の各異常個所の判定を行う軸受異常箇所特定機能とを有することを特徴とする。
【0010】
本発明の請求項3に係わる回転機軸受診断装置は、前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記特徴周波数抽出手段は、間引き処理した振動波形のFFT解析結果から前記回転機仕様の周波数の振幅を抽出する回転機特徴抽出機能、振動波形のFFT解析結果から前記モータ仕様の周波数の振幅を抽出するモータ特徴周波数抽出機能並びに包絡線処理した振動波形のFFT解析結果から前記軸受仕様の周波数の振幅を抽出する軸受特徴周波数抽出機能を有し、前記判定基準算出手段は、抽出した周波数の振幅からFFT解析回数分の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする。
【0011】
本発明の請求項4に係わる回転機軸受診断装置は、前記判定基準算出手段は、複数の特徴周波数抽出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする。
【0012】
本発明の請求項5に係わる回転機軸受診断装置は、前記波形分布処理手段は、波形の標準偏差を算出する波形分布標準偏差算出手段、波形の尖度を算出する波形分布尖度算出手段、波形の歪度を算出する波形歪度算出手段を有し、前記判定基準算出手段は、複数の振動波形の標準偏差、尖度、歪度算出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出した判定基準を前記判定基準データベースに格納することを特徴とする。
【発明の効果】
【0013】
回転機の転がり軸受の診断が監視対象から採取したデータから保守員の熟練度に関係なく、異常発生の有無を自動的に得ることができる。このため、異常検知後の対応を迅速に行うことが可能となり、機器の安定運転をサポートするとともに保守費用を削減しプラントのランニングコストの低下に貢献できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態における監視対象の概要を示した図。
【図2】本発明の実施形態のシステム概要を示した図。
【図3】本発明の実施形態の動作を説明するための図。
【図4】本発明の実施形態における正常な転がり軸受の包絡線処理後の波形を示した図。
【図5】図4の波形をFFT解析した出力波形を示す図。
【図6】本発明の実施形態における外輪に傷をつけた転がり軸受の包絡線処理後の波形を示した図。
【図7】図6の波形をFFT解析した出力波形を示す図。
【図8】本発明の実施形態のおける正常な転がり軸受のオリジナル振動波形を示す図。
【図9】図8の波形をFFT解析した出力波形を示す図。
【図10】本発明の実施形態における外輪に傷をつけた転がり軸受のオリジナル振動波形を示す図。
【図11】図10の波形をFFT解析した出力波形を示す図。
【図12】本発明の実施形態における正常な転がり軸受の間引き処理後の出力波形を示す図。
【図13】図12の波形をFFT解析した出力波形を示す図。
【図14】本発明の実施形態における外輪に傷をつけた転がり軸受の間引き処理後の出力波形を示す図。
【図15】図14の波形をFFT解析した出力波形を示す図。
【図16】本発明の実施形態における正常軸受の波形分布を示す図。
【図17】本発明の実施形態における外輪に傷をつけた転がり軸受の波形分布を示す図。
【図18】本発明の実施形態における異常判定機能を説明するための図。
【図19】本発明の実施形態におけるデータベース構成を示す図。
【図20】本発明の実施形態における統計量判定基準を形成する方法を説明するための図。
【図21】本発明の実施形態における変化量による判定基準を形成する方法を説明するための図。
【図22】本発明の実施形態における波形分布による判定基準を形成する方法を説明するための図。
【図23】本発明の実施形態における機器仕様データベースの一部項目の計算式を示す図。
【図24】本発明の実施形態における機器仕様データベースのデータ編集を行う画面例を示す図。
【図25】本発明の実施形態における判定基準データベースのデータ編集を行う画面例を示す図。
【図26】本発明の実施形態における正常な診断結果一覧画面を示す図。
【図27】本発明の実施形態における異常な診断結果一覧画面を示す図。
【図28】本発明の実施形態のシステムフローを示す図。
【発明を実施するための形態】
【0015】
以下に本発明に係る実施形態を図を参照して説明する。図1に以下に説明する具体的な診断対象の機器構成例を示したが、回転機であるポンプ11は駆動源であるモータ12に接続され、転がり軸受13によって回転体が支持されている。このような機器構成にあっては、上述もしたが、異常が発生する確率の高い箇所として転がり軸受13が挙げられる。
【0016】
そこで、この転がり軸受13に図示しない振動計を取付けて、転がり軸受13の異常を監視することになるが、振動計からの出力波形データにはポンプ11、モータ12からの振動も混在して採取されることになる。本発明は、このような機器構成にて各種の振動波形データが混在して採取されても、各構成機器・部品の正常・異常を精度よく検出することを可能としたものである。
【0017】
図2は、本発明の実施形態のシステム概要を示したものである。すなわち、矢印で示した転がり軸受13から採取されたオリジナル振動波形データ14は振動波形データベース15に格納される。振動波形データベース15に格納されたオリジナル振動波形データ14は、包絡線処理手段16、間引き処理手段17、波形分布処理手段18並びに高速フーリエ解析するFFT解析手段19へ入力される。
【0018】
FFT解析手段19には、包絡線処理手段16、間引き処理手段17からの出カデータも入力される。FFT解析手段19にて解析された出カデータは特徴周波数抽出手段20に入力される。また、特徴周波数抽出手段20には、機器仕様データベース21が接続されており、このデータベース21に格納されている機器仕様データ、すなわち、ポンプ11、モータ12、転がり軸受13などの機器仕様データが格納されている。
【0019】
特徴周波数抽出手段20並びに波形分布処理手段18からの出カデータは判定手段22に入力され、判定基準データベース23に格納されている判定基準データと比較され各機器の異常の有無が判定される。判定基準データベース23に格納されている判定基準データは、判定基準算出手段24にて算出されるが、判定基準算出にあたっては、波形分布処理手段18並びに特徴周波数抽出手段20からの出カデータが利用される。また、判定基準データベース23には機器仕様データベース21から機器仕様データも入力される。
【0020】
このような図2の構成において、振動波形データベース15に格納された振動波形データは、包絡線処理手段16により包絡線処理された振動波形データと、間引き処理手段17により予め指定された点数ごとに間引きが行われた振動波形データと、採取された状態のオリジナル振動波形データ14の3種類の波形に加工され、FFT解析手段19により各振動波形データがFFT解析される。
【0021】
FFT解析されたデータは、特徴周波数抽出手段20に送られ、機器仕様データベース21に格納されている機器仕様から算出される発生すべき周波数部分の振幅を抽出する。一方、振動波形データベース15の振動波形データは波形分布処理手段18により波形分布の統計処理が行われる。
【0022】
波形分布処理結果は、特徴周波数抽出手段20による処理結果とともに判定基準算出手段24に送られ、判定基準の計算を行い、計算結果が判定基準データベース23に格納される。特徴周波数抽出手段20と波形分布処理手段18の処理結果は判定手段22で判定基準データベース23の判定基準と比較され、転がり軸受の診断が行われる。
【0023】
このような構成によれば、特徴周波数抽出手段20及び波形分布
処理手段18により振動の特徴の数値化を可能とし、判定基準との比較により異常判定が可能となるだけでなく、同一の振動波形データを包絡線処理、間引き処理、波形分布の処理を施すことにより異常事象を分類し転がり軸受以外の異常を区別することが可能となる。
【0024】
次に、図3を参照して図2に示した処理内容を更に詳細に説明する。すなわち、オリジナル振動波形データ14を包絡線処理25し、FFT解析26を行って特徴周波数抽出処理27を行い判定28に至る。この処理方法によると、転がり軸受仕様の周波数が抽出できる。
【0025】
図4には正常な転がり軸受の包絡線処理後の波形を示しており、図5にこの図4の包絡線処理済波形をFFT解析した出力波形を示してある。さて、図6には外輪に傷がある転がり軸受の包絡線処理後の波形を示しており、図7にこの図6の包絡線処理済波形をFFT解析した出力波形を示してある。
【0026】
次に、図3のオリジナル振動波形データ14を直接FFT解析29し、特徴周波数抽出30、判定31に至る処理である。この処理方式は、高速サンプリング方式といい、周波数帯域を広げ周波数のメッシュを粗くする方式で、モータの振動診断に好適である。
【0027】
図8は、この高速サンプリング方式にて正常な転がり軸受のオリジナル振動波形データを示すもので、図9は、これをFFT解析した出力波形を示してある。これに対して、図10は、高速サンプリング方式にて外輪に傷がある転がり軸受のオリジナル振動波形データを示すもので、図11には、これをFFT解析した出力波形を示してある。
【0028】
次に、図3のオリジナル振動波形データ14の波形のサンプリング点数を間引く間引き処理32を行った後にFFT解析33を経て特徴周波数抽出34、判定35に至る処理である。この処理方式は低速サンプリング方式といい、周波数帯域を狭くし周波数のメッシュを細かくする方式で回転機の振動診断に好適である。
【0029】
図12はこの低速サンプリング方式にて正常な転がり軸受の間引き処理後の出力波形を示すもので、図13は、これをFFT解析した出力波形を示すものである。図14には、低速サンプリング方式にて外輪に傷がある転がり軸受の間引き処理後の出力波形を示すもので、これに対して図15は、これをFFT解析した出力波形を示すものである。
【0030】
次に、図3にて波形分布処理36の出力結果をもって判定37を行う方式を説明する。この波形分布処理方式は、図3にて上述した包絡線処理25後にFFT解析26を行う方式、オリジナル振動波形データをFFT解析29する方式、波形間引き後にFFT解析を行う方式のいずれにおいても判定結果が異常と出たときに、波形分布処理方式による判定が異常の場合には、モータ並びに回転機は正常で転がり軸受が異常であることを識別するための方式である。図16には、正常軸受の波形分布を示してあり、図17には、外輪に傷がある転がり軸受の波形分布を示してある。いずれも横軸には振幅を縦軸には確率密度を表してある。
【0031】
図18には上述した判定に係るデータベースの関係を示す図である。すなわち、FFT解析手段19からは間引き処理、未処理、包絡線処理のそれぞれの出力結果が抽出されるが、これらの出力結果と機器仕様データベース21に格納されている各種仕様データにより得られた出力が判定手段22に入力される。判定手段22では判定基準データベース23に格納されている判定基準と比較して異常
判定がなされる。
【0032】
図18の機器仕様データベース21の回転機仕様21aは間引き処理後のFFT解析結果に反映され、モータ仕様21bは未処理データのFFT解析結果に反映され、軸受仕様21cは包絡線処理データのFFT解析結果にそれぞれ反映されている。そして、図18に示すように、判定基準データベース23の回転機異常判定基準23a、モータ異常判定基準23b、軸受異常判定基準23cに基づいて、判定が行われる。判定手段22には回転機異常判定機能22a、モータ異常判定機能22b、軸受異常判定機能22cが設けられており、これらの機能に基づいて異常分類機能22dが働く。判定手段22には、更に軸受異常個所特定機能22eが設けられている。
【0033】
図19には上述した各種データベースなどのファイル構成例を示したものである。すなわち、波形ファイル38は、図1に示した振動波形データベース15を構成するファイルを示したものである。軸受診断結果ファイル39は、診断結果を構成するファイルを示したものである。機器仕様ファイル40は、図1の機器仕様データベース21内のファイル構成を示したものである。判定基準ファイル41は、図1の判定基準データベース23内のファイル構成を示したものである。
【0034】
そして、図19の下方に示してあるように、波形ファイル38のデータに対して機器仕様ファイル40、判定基準ファイル41を参照して軸受診断42を行った結果を軸受診断結果ファイル39に保存されることになる。
【0035】
さて、上述したように軸受の診断を行うにあたっては、判定基準が必要である。以下にこの判定基準の形成方法並びに構成などについて図を参照して説明する。
【0036】
図20は正常データを選択して統計量判定基準を形成する方法を説明するためのブロック図である。FFT解析手段19からのFFT解析結果は、特徴周波数抽出手段20に送られ、間引き処理後のFFT解析結果から機器仕様データベース21に格納されている回転機仕様21aの周波数が抽出され(20a)、直接のFFT解析結果はモータ仕様21bの周波数が抽出され(20b)、包絡線処理後のFFT解析結果から軸受仕様21cの周波数が抽出される(20c)。
【0037】
各機器仕様の周波数が抽出された結果は、判定基準算出手段24に送られ、統計量算出手段24aで複数の特徴値の平均値と標準偏差が算出され、統計量判定基準算出手段24bで平均値+標準偏差×係数の判定基準が算出され、判定基準データベース23に格納される。この判定基準によれば、過去の正常状態のデータによりその機器の特徴に合った判定基準を算出し、転がり軸受の異常を自動で精度よく判定することができる。
【0038】
図21は変化量による判定基準を形成する方法を説明するためのブロック図である。FFT解析手段19からのFFT解析結果は、特徴周波数抽出手段20に送られ、間引き処理後のFFT解析結果から機器使用データベース21に格納されている回転機仕様21aの周波数が抽出され(20a)、直接のFFT解析結果はモータ仕様21bの周波数が抽出され(20b)、包絡線処理後のFFT解析結果から軸受仕様21cの周波数が抽出される(20c)。
【0039】
各機器仕様の周波数が抽出された結果は、判定基準算出手段24に送られ、統計量算出手段24aで複数の特徴値の平均値と標準偏差が算出され、統計量判定基準算出手段24bで平均値+標準偏差×係数の判定基準が算出され、変化量算出手段24cで複数データを選択した場合の平均値と標準偏差の時系列の傾きを算出し、変化量判定値算出手段24dで時系列の傾き×係数の変化量判定基準が算出され、判定基準データベース23に格納される。この判定基準によれば、過去の複数のデータによりその機器の特徴と異常の進展速度を数値化することで、機器の特性と異常進展速度に合った転がり軸受の異常を自動で精度よく判定することができる。
【0040】
図22は波形分布による判定基準を形成する方法を説明するためのブロック図である。振動波形データベース15からのオリジナル振動波形データ14を特徴周波数抽出手段20の波形分布標準偏差算出手段20dにより波形分布標準偏差を算出し、波形分布尖度算出手段20eにより波形分布尖度を算出し、波形分布歪度算出手段20fにより波形分布歪度を算出する。
【0041】
これらの波形分布データを判定基準算出手段24の統計量算出手段24aにて統計量を算出し、統計量判定基準算出手段24bにより基準値を算出する。また、変化量算出手段24cにより変化量を算出し、変化量判定基準算出手段24dにより基準値を算出して統計量判定基準値とともに判定基準データベース23に格納する。この判定基準によれば、振動波形データの波形分布の判定基準を数値化することができることから、機器仕様から判定できる転がり軸受の異常のほかに例えばグリース切れなど、非定常な軸受異常に対しても異常判定が可能となる。
【0042】
次に機器仕様データベース21の一部項目の計算式を図23に示す。項目としては、モータすべり、外輪厚さ、中立輪半径、保持器公転周波数fc、N成分周波数、ポンプZN成分周波数ZNp、モータZN(外扇)成分ZNMO、溝高調波(回転子スロット)周波数、溝高調波(固定子)周波数など一例を示した。
【0043】
図24は、機器仕様データベース21のデータの編集を行う画面例である。編集するデータベースを選択し、選択する項目は回転数などの機器仕様をプルダウンメニューから選択する。編集を行う項目にレ印を付与すると入力可能となり、機器仕様の追加、削除、変更を行うことができる。同様にして図25は、判定基準データベース23の編集を行う画面例で、図24と同様に判定基準の追加、削除、変更を行うことができる。
【0044】
上述したように診断を行った結果を診断結果一覧画面表示43として図26に示すが、この図26は診断結果が正常な例である。すなわち、画面43の右欄上部に収録ファイル一覧44が表示され、ここには診断を行った結果をファイル名44a、収録日時44b、回転数44cが表示される。これらのファイルの内で、診断結果の詳細は表示希望のファイルを選択する。
【0045】
図で黒白反転表示してある黒白反転ファイル44dが選択された項目である。選択された黒白反転ファイル44dの診断結果は、画面左欄に診断結果一覧45として表示される。ここでは、各項目ごとの表示欄45aに棒グラフ45b表示され、図の白抜き表示は画面では緑色表示される。各項目ごとの表示欄には正常/異常の境界ライン45cが全項目の表示欄に表示されている。
【0046】
各項目の棒グラフ45bがこの境界ライン45cに達していない場合には、その項目は正常であることを表しており、棒グラフ45bが境界ライン45cを超えている場合にはその項目は異常であることを表している。図26の例ではいずれも正常であることが分かるが、異常な項目の棒グラフは画面表示では赤色表示がなされる。また、画面の右下にはガイダンス欄46が設けられており、この欄には診断対象の診断結果が簡潔に表示されるようになっている。図の例では、軸受、モータ、ポンプのいずれも「良」であることを表している。
【0047】
図27には他の診断結果一覧表示画面47を示してある。この例では、診断結果が異常であることを表示しており、収録ファイル一覧48のファイル名48aの中から黒白反転ファイル48bを選択する。このファイル48bは、転動体に傷がある軸受に関する診断データが格納されている。ファイルを選択することによって、診断結果一覧49には診断対象の各機器並びに要素部品ごとの診断結果が棒グラフ表示されている。
【0048】
この表示は図26と同一の表示ルールになっており、白抜きの棒グラフは正常であることを表してある。しかしながら、診断結果一覧49のfbの棒グラフ49aはハッチングで表示してあるが、これは画面では赤色表示になっている。そして、この赤色の棒グラフ49aは正常/異常の境界ライン49bを超えていて、この項目fbは異常であることを表している。項目fbは、図23に示してあるが、転がり軸受の転動体自転周波数を示しており、この棒グラフ49aが赤色表示ということは、項目fbが異常であることを示していることが分かる。
【0049】
また、図27の診断結果一覧表示画面47の右下に設けられているガイダンス欄50には、「軸受が判定基準値を超過しています。」との記述があり、更に、モータ、ポンプについては正常であるが、転がり軸受については注意を要し、特に項目fb、すなわち転動体には異常があることを示している。
【0050】
次に本発明に係るシステムフローを図28を参照して説明する。すなわち、システムは、大別して軸受診断フロー51とデータベース編集フロー52から構成されている。軸受診断フロー51は更に軸受診断実行フロー53、診断結果表示フロー54、判定基準計算フロー55から構成されている。軸受診断実行フロー53は、機器仕様判定基準選択ステップ53a、診断実行ステップ53b、診断結果保存ステップ53cから構成されている。診断は、回転機、ポンプ、転がり軸受ごとの機器仕様によって決定される判定基準に基づき実行される。
【0051】
診断結果表示フロー54は、条件設定ステップ54a、検索ステップ54b、データ選択ステップ54c、表示データ読込ステップ54d、データ表示ステップ54eから構成されている。診断結果表示に際しては、図26、図27で説明したように上述の各ステップによってなされる。判定基準計算フロー55は、判定基準計算ステップ55a、計算結果保存ステップ55bから構成されている。
【0052】
データベース編集フロー52は、パスワード設定ステップ52a、データベース選択ステップ52b、機器仕様設定ステップ52c、判定基準設定ステップ52d、データベース読込ステップ52e、データベース編集ステップ52f、データベース保存ステップ52gから構成されている。そして、診断結果表示フロー54、データベース編集フロー52はモード選択56にて選択する方式となっている。
【符号の説明】
【0053】
11…ポンプ、12…モータ、13…軸受、14…オリジナル振動波形データ、15…振動波形データベース、16…包絡線処理手段、17…間引き処理手段、18…波形分布処理手段、19…FFT解析手段、20…特徴周波数抽出手段、21…機器仕様データベース、22…判定手段、23…判定基準データベース、24…判定基準算出手段、25…包絡線処理、26、29、33…FFT解析、27、30、34…特徴周波数抽出処理、28、31、35、37…判定、32…間引き処理、36…波形分布処理、38…波形ファイル、39…軸受診断結果ファイル、40…機器仕様ファイル、41…判定基準ファイル、42…軸受診断、43、47…診断結果一覧画面表示、44、48…収録ファイル一覧、45、49…診断結果一覧、46、50…ガイダンス欄、51…軸受診断フロー、52…データベース編集フロー、53…軸受診断実行フロー、54…診断結果表示フロー、55…判定基準計算フロー。
【特許請求の範囲】
【請求項1】
モータにより駆動される回転機の仕様情報を格納する機器仕様データベースと、前記回転機の軸受の振動波形を格納する振動波形データベースと、前記振動波形を包絡線処理する包絡線処理手段と、前記振動波形から指定した点数毎にデータを間引いてサンプリング振動波形を作成する間引き処理手段と、前記振動波形、前記包絡線処理波形並びに前記間引き処理波形を高速フーリエ解析するFFT解析手段と、前記FFT解析手段の解析結果から前記機器仕様に対応した理論周波数の振動成分を抽出する特徴周波数抽出手段と、前記振動波形の分布処理を行う波形分布処理手段と、前記特徴周波数抽出結果並びに前記波形分布結果から判定基準を算出する判定基準算出手段と、この判定基準算出手段にて算出された判定基準を格納する判定基準データベースと、前記特徴周波数抽出結果に対して前記判定基準を用いて判定する判定手段とを具備することを特徴とする回転機軸受診断装置。
【請求項2】
前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記判定基準データベースには回転機異常判定基準、モータ異常判定基準並びに軸受異常判定基準が格納されており、前記判定手段は、間引き処理した振動波形のFFT解析結果を前記回転機異常判定基準と比較して前記回転機の異常を判定する回転機異常判定機能、振動波形のFFT解析結果を前記モータ異常判定基準と比較して前記モータの異常を判定するモータ異常判定機能、包絡線処理した振動波形のFFT解析結果を前記軸受異常判定基準と比較して前記軸受の異常を判定する軸受異常判定機能、前記各異常判定結果から前記回転機、前記モータ並びに前記軸受の異常を分類する異常分類機能、及び前記異常分類機能によって軸受異常に分類された場合に前記軸受の各異常個所の判定を行う軸受異常箇所特定機能とを有することを特徴とする請求項1記載の回転機軸受診断装置。
【請求項3】
前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記特徴周波数抽出手段は、間引き処理した振動波形のFFT解析結果から前記回転機仕様の周波数の振幅を抽出する回転機特徴抽出機能、振動波形のFFT解析結果から前記モータ仕様の周波数の振幅を抽出するモータ特徴周波数抽出機能並びに包絡線処理した振動波形のFFT解析結果から前記軸受仕様の周波数の振幅を抽出する軸受特徴周波数抽出機能を有し、前記判定基準算出手段は、抽出した周波数の振幅からFFT解析回数分の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする請求項1記載の回転機軸受診断装置。
【請求項4】
前記判定基準算出手段は、複数の特徴周波数抽出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする請求項3記載の回転機軸受診断装置。
【請求項5】
前記波形分布処理手段は、波形の標準偏差を算出する波形分布標準偏差算出手段、波形の尖度を算出する波形分布尖度算出手段、波形の歪度を算出する波形歪度算出手段を有し、前記判定基準算出手段は、複数の振動波形の標準偏差、尖度、歪度算出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出した判定基準を前記判定基準データベースに格納することを特徴とする請求項3記載の回転機軸受診断装置。
【請求項1】
モータにより駆動される回転機の仕様情報を格納する機器仕様データベースと、前記回転機の軸受の振動波形を格納する振動波形データベースと、前記振動波形を包絡線処理する包絡線処理手段と、前記振動波形から指定した点数毎にデータを間引いてサンプリング振動波形を作成する間引き処理手段と、前記振動波形、前記包絡線処理波形並びに前記間引き処理波形を高速フーリエ解析するFFT解析手段と、前記FFT解析手段の解析結果から前記機器仕様に対応した理論周波数の振動成分を抽出する特徴周波数抽出手段と、前記振動波形の分布処理を行う波形分布処理手段と、前記特徴周波数抽出結果並びに前記波形分布結果から判定基準を算出する判定基準算出手段と、この判定基準算出手段にて算出された判定基準を格納する判定基準データベースと、前記特徴周波数抽出結果に対して前記判定基準を用いて判定する判定手段とを具備することを特徴とする回転機軸受診断装置。
【請求項2】
前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記判定基準データベースには回転機異常判定基準、モータ異常判定基準並びに軸受異常判定基準が格納されており、前記判定手段は、間引き処理した振動波形のFFT解析結果を前記回転機異常判定基準と比較して前記回転機の異常を判定する回転機異常判定機能、振動波形のFFT解析結果を前記モータ異常判定基準と比較して前記モータの異常を判定するモータ異常判定機能、包絡線処理した振動波形のFFT解析結果を前記軸受異常判定基準と比較して前記軸受の異常を判定する軸受異常判定機能、前記各異常判定結果から前記回転機、前記モータ並びに前記軸受の異常を分類する異常分類機能、及び前記異常分類機能によって軸受異常に分類された場合に前記軸受の各異常個所の判定を行う軸受異常箇所特定機能とを有することを特徴とする請求項1記載の回転機軸受診断装置。
【請求項3】
前記機器仕様データベースには回転機仕様、モータ仕様並びに軸受仕様が格納されており、前記特徴周波数抽出手段は、間引き処理した振動波形のFFT解析結果から前記回転機仕様の周波数の振幅を抽出する回転機特徴抽出機能、振動波形のFFT解析結果から前記モータ仕様の周波数の振幅を抽出するモータ特徴周波数抽出機能並びに包絡線処理した振動波形のFFT解析結果から前記軸受仕様の周波数の振幅を抽出する軸受特徴周波数抽出機能を有し、前記判定基準算出手段は、抽出した周波数の振幅からFFT解析回数分の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする請求項1記載の回転機軸受診断装置。
【請求項4】
前記判定基準算出手段は、複数の特徴周波数抽出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出された判定基準を前記判定基準データベースに格納することを特徴とする請求項3記載の回転機軸受診断装置。
【請求項5】
前記波形分布処理手段は、波形の標準偏差を算出する波形分布標準偏差算出手段、波形の尖度を算出する波形分布尖度算出手段、波形の歪度を算出する波形歪度算出手段を有し、前記判定基準算出手段は、複数の振動波形の標準偏差、尖度、歪度算出結果の平均値及び標準偏差を算出する統計量算出手段、算出された統計量から判定基準を算出する判定基準算出手段、複数データの時系列での傾きを算出する変化量算出手段、算出された傾きから変化量の判定基準を算出する変化量判定基準算出手段を有し、算出した判定基準を前記判定基準データベースに格納することを特徴とする請求項3記載の回転機軸受診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2012−8030(P2012−8030A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−144828(P2010−144828)
【出願日】平成22年6月25日(2010.6.25)
【出願人】(390014568)東芝プラントシステム株式会社 (273)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月25日(2010.6.25)
【出願人】(390014568)東芝プラントシステム株式会社 (273)
【Fターム(参考)】
[ Back to top ]