
回転波動機構
【課題】推進運動を生成する機構を複雑な構成とすることなく、しかも、適用された作業ロボットの防塵防水性を達成でき、さらに、外部に接する外周のすべての部分で表面波動を生成出来ること。
【解決手段】 各揺動板ユニットBEiは、センターパイプ22に固定される揺動円板20と、揺動円板20の外周部に嵌合される内輪18を有するボールベアリング16と、ボールベアリング16の外輪の外周部の円周上に均等に4箇所、設けられる突起部16PA、16PB、16PC、および16PCとを含んで構成され、突起部16PA、16PB、16PC、および16PCが歩行型回転運動を生成するように、揺動円板20が、センターパイプ22に対し所定距離εだけ偏心した位置に中心があり、センターパイプ22に対し所定の角度φだけ傾斜しているもの。
【解決手段】 各揺動板ユニットBEiは、センターパイプ22に固定される揺動円板20と、揺動円板20の外周部に嵌合される内輪18を有するボールベアリング16と、ボールベアリング16の外輪の外周部の円周上に均等に4箇所、設けられる突起部16PA、16PB、16PC、および16PCとを含んで構成され、突起部16PA、16PB、16PC、および16PCが歩行型回転運動を生成するように、揺動円板20が、センターパイプ22に対し所定距離εだけ偏心した位置に中心があり、センターパイプ22に対し所定の角度φだけ傾斜しているもの。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、推進運動を生成する回転波動機構に関する。
【背景技術】
【0002】
床下の白アリ被害の検査、屋根裏の点検、建築物の配線工事、健全性検査、床下天井裏などの補修作業、あるいは、災害時の救助活動などのための瓦磯内の探査の場合、ロボットを作業および救助活動に用いることが、提案されている。そのようなロボットとしては、代表的に、ヘビ型ロボット、クローラ型ロボット、多輪型ロボットなどが提案されている。
また、上述のロボットは、狭隘な環境に潜り込んで行わなければならない作業が少なからず存在するのでジャッキアップ移動方式のロボットが提案されている。ジャッキアップ移動方式のロボットは、例えば、非特許文献1にも示されるように、複数の偏心カムの回転運動により、相対向する2枚のプレートを互いに離隔する方向または近接する方向に移動させながら、推進するものとされる。即ち、偏心カムの回転運動で、カムの回転軸の周りの揺動運動を生成することにより、低速だが強力な歩行的な推進運動が生成される。
くも型ロボットにおいては、例えば、特許文献1にも示されるように、4本の脚部が両側部に移動可能に設けられるフレームと、フレームの両側部にそれぞれ設けられ各脚部の一端が連結される平歯車と、その平歯車相互間に配される互いに同一のモジュールの中間平歯車とからなる歯車列と、8本の脚部が上下動するように各歯車列を回動させる複数の回転手段とを含んで構成されるものが提案されている。即ち、このような一対の歯車列により、各脚部の一端が連結される平歯車から、足の運動における位相の違う動きを取り出して足の動きが生成される。
くも型ロボットにおいては、例えば、特許文献2にも示されるように、4本の脚部が両側部に移動可能に設けられる本体と、各脚部の一端が案内される溝を有する複数個の溝付きカムと、複数個の溝付きカムを回動させる回転軸の一端に設けられる歯車列と、歯車列に回動力を供給するモータとを含んで構成されるものが提案されている。これにより、複数の連動するカムの運動に従動するカムフォロアの運動から、8本の足の運動が生成される。
【0003】
そして、例えば、特許文献3にも示されるように、横方向波動を発生させる波動発生装置が提案されている。この装置は、可撓性平坦部材と、一方の端部が可撓性平坦部材に固着され、他方の端部が各平行ビームにそれぞれ、枢着される複数の駆動ロッドと、各平行ビームの一端部に取り付けられるクランクアッセンブリーと、クランクアッセンブリーに連結されるギアモータとを含んで構成される。このような構成において、ギアモータが作動状態とされる場合、複数の平行ビームにおける非拘束端部が、回転軸に対し垂直な面で楕円運動することによって、可撓性平坦部材に横方向波動を生じさせることとなる。即ち、この装置は、一つの回転軸の運動から、クランクアッセンブリーにおいて複数の位相を順に変えた偏心円盤を回転することによって波動運動を生成させるアイデアが示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第5423708号公報
【特許文献2】米国特許第3331463号公報
【特許文献3】米国特許第6689076号公報
【非特許文献】
【0005】
【非特許文献1】「狭隘空間におけるジャッキアップ移動体:Bari-bari-I の開発」、著者:塚越 秀行, 天野 裕輔, 田中 崇裕,北川 能: ロボメカ講演会 2004 2P1-H-42
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1乃至特許文献3、非特許文献1において提案された装置は、偏心カム、溝付きカム等を回転させる軸と直交する方向に波動運動を生成するものなので作業ロボットにおいてそのような機構を適用した場合、回転運動を所望の推進方向に変換する機構が必要となるので推進運動を生成する機構を複雑な構成とする虞がある。また、クローラ型ロボットにおいて、クローラの部分の防塵防水性を達成することが難しく、同様に、上述のくも型ロボットにおいても、本体から外部に突出した脚部が本体に対し上下運動をするので本体について防塵防水性を保つことが難しいという問題を伴う。
【0007】
以上の問題点を考慮し、本発明は、推進運動を生成する回転波動機構であって、推進運動を生成する機構を複雑な構成とすることなく、しかも、適用された作業ロボットの防塵防水性を達成でき、さらに、外部に接する外周のすべての部分で表面波動を生成出来る回転波動機構を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述の目的を達成するために、本発明に係る回転波動機構は、駆動力供給部からの回動力が伝達される駆動回転軸と、駆動回転軸の軸線に沿った所定の間隔をもって駆動回転軸の軸線と交差するように駆動回転軸に固定される複数の揺動円板と、各揺動円板の外周部に回動可能に配され揺動円板の運動に追従する回動部材と、回動部材の回転を所定の回転角に制限するとともに隣接する回動部材を直列に連結する可撓性連結部材と、を備え、揺動円板の中心位置が駆動回転軸の中心軸線に対し所定距離、偏心した状態で、揺動円板および回動部材に連なる共通の平面が駆動回転軸の中心軸線に対し所定の傾斜角度をなすように複数の揺動円板が駆動回転軸に固定されることを特徴とする。
【発明の効果】
【0009】
本発明に係る回転波動機構によれば、駆動力供給部からの回動力が伝達される駆動回転軸と、駆動回転軸の軸線に沿った所定の間隔をもって駆動回転軸の軸線と交差するように駆動回転軸に固定される複数の揺動円板と、各揺動円板の外周部に回動可能に配され揺動円板の運動に追従する回動部材と、回動部材の回転を所定の回転角に制限するとともに回動部材を直列に連結する可撓性連結部材と、を備えて構成されるので推進運動を生成する機構を複雑な構成とすることなく、外部に接する外周のすべての部分で表面波動を生成し、しかも、可撓性連結部材によって駆動回転軸、複数の揺動円板、および、回動部材を覆うことも可能なので適用された作業ロボットの防塵防水性を達成できる。
【図面の簡単な説明】
【0010】
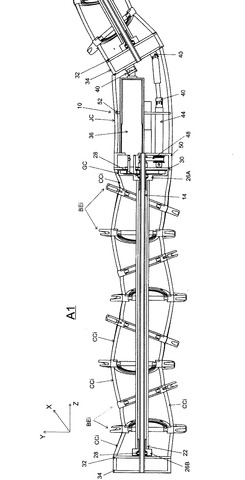
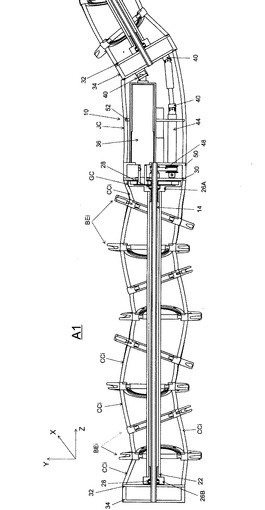
【図1】本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの内部の構成を示す断面図である。
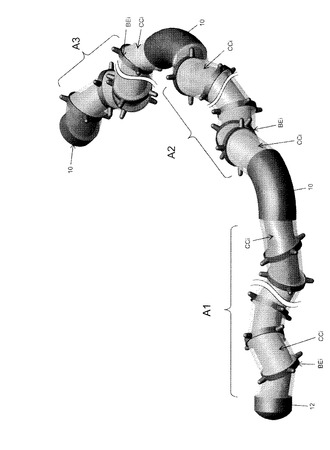
【図2】図1に示されるムカデ型作業ロボットの外観を示す斜視図である。
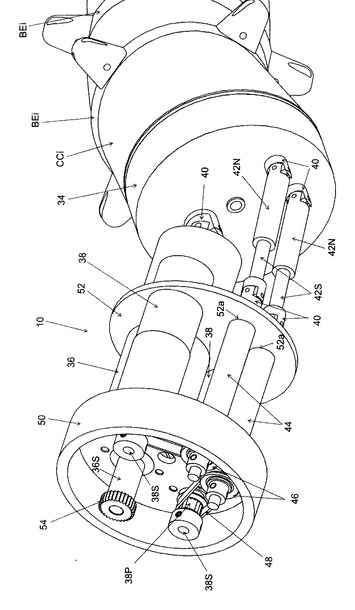
【図3】図1に示されるムカデ型作業ロボットにおける能動屈曲部の構成を示す斜視図である。
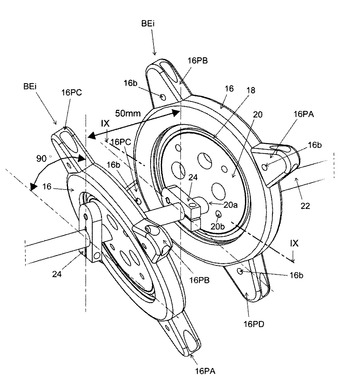
【図4】図1に示されるムカデ型作業ロボットにおける揺動板ユニットを示す斜視図である。
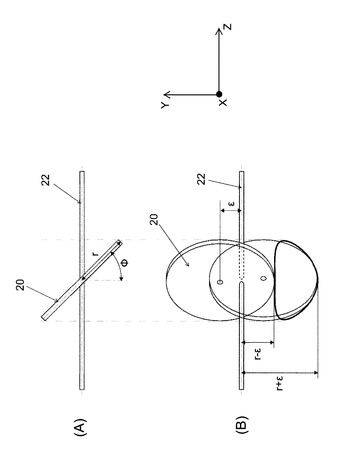
【図5】(A)は揺動円板とセンターパイプとの位置関係の説明に供される図であり、(B)は、(A)に示される図の正面図である。
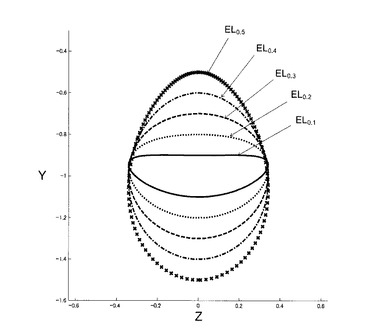
【図6】φ=20°で固定して、ε=0.1r,0.2r,0.3r,0.4r、0.5rと変動した場合、それぞれ、生成される軌道曲線を示す。
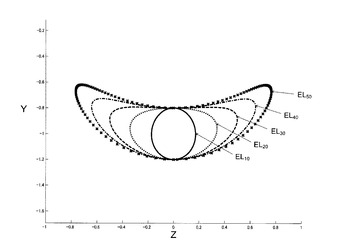
【図7】ε=0.2rで固定して、φ=10°、20°、30°、40°、50°と変動した場合、それぞれ、生成される軌道曲線を示す。
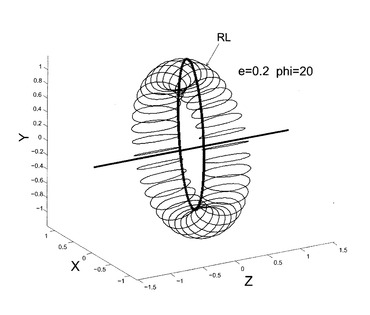
【図8】Z軸の周りに進行方向に沿って放射状に回転軌跡を生成する運動の説明に供される図である。
【図9】図4におけるIX−IX線に沿って示される断面図である。
【図10】本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの他の一例の要部を示す斜視図である。
【発明を実施するための形態】
【0011】
図2は、本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの外観を概略的に示す。
図2において、ムカデ型作業ロボット(以下にロボットともいう)は、進行方向の先端部に設けられ進行方向の環境を固体撮像素子等により撮影し撮像データを得るカメラ部12と、カメラ部12に一端が連結される回転揺動ユニットA1と、回転揺動ユニットA1の他端に連結される能動屈曲部10と、回転揺動ユニットA1に連結された能動屈曲部10の他端に連結される回転揺動ユニットA2と、回転揺動ユニットA2に能動屈曲部10を介して連結される回転揺動ユニットA3とを含んで構成される。
能動屈曲部10は、図1および図3に示されるように、例えば、回転揺動ユニットA1と回転揺動ユニットA2とを連結するとともに、後述する回転揺動ユニットA1における中心駆動回転軸としてのセンターパイプ22を回動させるものとされる。なお、最後端に設けられた能動屈曲部10は、回転揺動ユニットA3を駆動するものとされ、また、回転揺動ユニットA3と回転揺動ユニットA2との間に設けられた能動屈曲部10は、回転揺動ユニットA2を駆動するものとされる。
能動屈曲部10は、後述する回転揺動ユニットA1における端部に設けられる歯車減速機構に連結されるギヤボックス50と、上述の歯車減速機構を介してセンターパイプ22を回動させる推進用モータ36と、回転揺動ユニットA1と隣接する回転揺動ユニットA2とのなす傾斜角度を調整する角度調整機構と、角度調整機構の一部を構成する2本のボールねじをそれぞれ、個別に駆動させる角度調整用モータ38と、を含んで構成されている。
【0012】
円筒状のギヤボックス50内には、推進用モータ36の突出した出力軸36Sに連結されるピンオンギヤ54と、角度調整用モータ38の出力軸38Sに連結されるタイミングベルトプーリ38Pと、各伝達軸44の一端に連結されたタイミングベルトプーリ46とが配されている。
出力軸36Sは、回転揺動ユニットA1における端部に向けてギヤボックス50の端部を貫通し支持軸14に対し略平行に突出している。各出力軸38Sは、出力軸36Sに対し所定距離、離隔した位置で略平行にギヤボックス50の端部を貫通し突出している。各出力軸38Sは、所定距離、互いに離隔してギヤボックス50内に配されている。
【0013】
各伝達軸44の一端は、それぞれ、各出力軸38Sに対し略平行にギヤボックス50の端部を貫通しギヤボックス50の内側に突出している。タイミングベルトプーリ46とタイミングベルトプーリ38Pとの間には、タイミングベルト48が巻き掛けられている。これにより、角度調整用モータ38の出力軸38Sからの回動力が各伝達軸44に伝達される。各伝達軸44の両端は、ギヤボックス50の端部およびブラケット52の軸受孔52aにより回動可能に支持されている。各伝達軸44の他端には、ユニバーサルジョイント40およびボールねじ42Sが連結されている。ボールねじ42Sは、ナット42Nに回動可能に嵌めあわされている。各ナット42Nの端部は、ユニバーサルジョイント40を介して隣接する回転揺動ユニットA2のエンドキャップ34に連結されている。
推進用モータ36は、ギヤボックス50の端部に支持されるとともに、ブラケット52により支持されている。また、推進用モータ36における回転揺動ユニットA2に対向する端部も、ユニバーサルジョイント40を介して回転揺動ユニットA2のエンドキャップ34に連結されている。
【0014】
推進用モータ36および角度調整用モータ38は、図示が省略される制御回路部により駆動制御される。これにより、推進用モータ36および角度調整用モータ38が作動状態とされる場合、回転揺動ユニットA1におけるセンターパイプ22が回動されるとともに、ボールねじ42Sに対しナット42Nが移動されることにより、回転揺動ユニットA2のエンドキャップ34と能動屈曲部10とのなす角度が変化するので回転揺動ユニットA1と隣接する回転揺動ユニットA2とのなす傾斜角度が調整される。
ブラケット52および推進用モータ36および角度調整用モータ38の周囲の内部空間は、伸縮および密封可能な可撓性カバー部材JC、例えば、ゴムチューブ、あるいは、ベローズチューブにより密封されている。
回転揺動ユニットA1、回転揺動ユニットA2、および、回転揺動ユニットA3は、互いに同一の構成を有するので回転揺動ユニットA1について説明し、回転揺動ユニットA2、および、回転揺動ユニットA3についての説明を省略する。
回転揺動ユニットA1は、図1に示されるように、両端がエンドプレート30および32により支持され内部中央を長手方向に沿って延在する支持軸14と、支持軸14におけるエンドプレート30側の端部にベアリング28を介して回動可能に支持されるギアケースGCと、支持軸14におけるエンドプレート32側の端部にベアリング28を介して回動可能に支持されるセンターパイプ受け部26Bと、支持軸14の周囲を覆うように回動可能に配され複数の揺動板ユニットBEi(i=1〜n,nは正の整数)を支持するセンターパイプ22と、可撓性連結部材として伸縮および密封可能な可撓性カバー部材CCi(i=1〜n,nは正の整数)とを含んで構成されている。
ギアケースGCは、ギヤボックス50の端部に向き合うエンドプレート30の内面側に配され、ピンオンギヤ54に噛み合う歯車列からなる歯車減速機構を収容する。これにより、ピンオンギヤ54から伝達された回動力は、歯車列を介してギアケースGCに伝達されることにより、ギアケースGCが支持軸14を中心として回動される。ギアケースGCは、一端にセンターパイプ22の一端を支持するセンターパイプ受け部26Aを有している。これにより、駆動回転軸としてのセンターパイプ22の両端が、それぞれ、センターパイプ受け部26Aおよび26Bに嵌合されることにより、センターパイプ22が、ギアケースGCのセンターパイプ受け部26A、および、26Bを介して回動可能に支持されることとなる。
【0015】
可撓性連結部材としての可撓性カバー部材CCiは、例えば、例えば、ゴムチューブ、あるいは、ベローズチューブとされ、後述する揺動板ユニットBEi相互間、揺動板ユニットBEiとエンドプレート32との間、および、揺動板ユニットBEiとエンドプレート30との間の内部空間をそれぞれ、密封する。また、可撓性カバー部材CCiは、後述する揺動板ユニットBEiにおけるボールベアリング16の外輪におけるセンターパイプ22を中心とした軸回りの回転を所定の回転角度範囲内に拘束する。
複数の揺動板ユニットBEiは、互いに同一構造を有するものとされる。また、隣接する一対の揺動板ユニットBEiは、図4に示されるように、所定の位相角度差、例えば、90度の位相角度差をもってセンターパイプ22に所定の間隔、例えば、約50mm間隔で配されている。
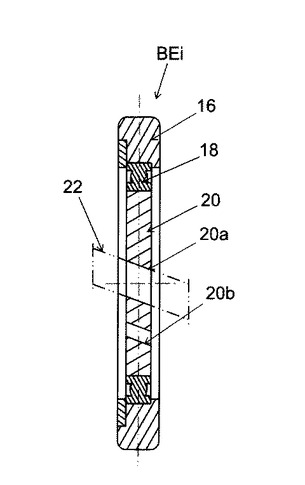
揺動板ユニットBEiは、図4および図9に示されるように、センターパイプ22に固定される揺動円板20と、揺動円板20の外周部に嵌合される内輪18を有するボールベアリング16と、回動部材としてのボールベアリング16の外輪の外周部の円周上に均等に4箇所、設けられる突起部16PA、16PB、16PC、および16PCとを含んで構成されている。
揺動円板20は、図5(B)に示されるように、センターパイプ22に対し所定距離εだけ偏心した位置に中心があり、図5(A)に示されるように、センターパイプ22に対し所定の角度φだけ傾斜している。即ち、揺動円板20におけるセンターパイプ22が貫通する孔20aは、図9に示されるように、中心軸線に対し傾斜するように形成されている。揺動円板20は、センターパイプ22に固定されるクランプ部材24の一端で係止されている。
【0016】
突起部16PA、16PB、16PC、および16PCは、それぞれ、センターパイプ22の軸線方向に対し交わるように貫通した貫通孔16bを有している。即ち、貫通孔16bは、ボールベアリング16の外輪の両端面に対し略直交するように形成されている。
これにより、揺動円板20が、センターパイプ22の回動に連なって回動した場合、
すべての突起部16PA、16PB、16PC、および16PCは、中心軸から外側に向かう往復運動と中心軸に沿った往復運動を組み合わせた歩行型回転運動を生成する。そのため、このような回転揺動ユニットが外部に接触すると、進行方向と一致する軸方向への推進力を生成することとなる。従って、能動屈曲部10で回転揺動ユニットA1〜A3を直列に連結して屈曲して操舵できるように構成したムカデ形ロボットは、防塵防水性を達成しながら、狭隘環境においても移動することが可能となる。
本発明に係る回転波動機構の一例は、図8に示されるように、Z軸が回転するセンターパイプ22だったとすると、X軸、Y軸により形成されるX、Y平面に回転運動を生成するのではなく、Z軸の周りに進行方向に沿って放射状に回転軌跡RLを生成する運動を生成する表面波機構である。
【0017】
即ち、表面波機構の原理は、図5(B)のようにZ軸(センターパイプ22)に対して、中心をεだけ偏心させ、さらに角度φだけ傾けて固定した揺動円板のZ軸を回転したときの外周部の運動を利用するものである。上述したように、この揺動円板の外周にはボールベアリングが取り付けられ、さらに外輪が軸周りに回転しないが上下左右そして軸方向に動けるように取り付けられている。このような構成により、図5(B)のZ軸周りの回転で揺動円板が回転したとき、ボールベアリング16の外輪の一点のYZ平面に投影した運動は、楕円軌道を描く。そのため、Z軸に沿って複数の揺動円板を一定位相ずらしながら取り付けた回転揺動ユニットの中心軸を回転させるとき、回転揺動ユニットの外周に取り付けられた突起部すべてが、ムカデの足のような歩行型回転運動を、軸から外側に向かって生成する。この運動はあたかも表面波を構成するものであるためこの機構が表面波機構と呼ばれる。
偏心量εと傾きφとで生成される波形(楕円軌道)の高さh、幅wの関係は、次式(1)、(2)で表せる。
h=(r+ε)−(r−ε)=2ε …(1)
w=2rsinφ …(2)
波形(楕円軌道)の高さhは、偏心量εの2倍であり、ここで、rは、揺動円板20の半径である。
例えば、φ=20°で固定して、ε=0.1r,0.2r,0.3r,0.4r、0.5rと変動した場合、ボールベアリング16の外輪の一点のYZ平面に投影した運動により生成される軌道は、それぞれ、図6に示される楕円曲線EL0.1、EL0.2、EL0.3、EL0.4、EL0.5のようになる。
逆に、ε=0.2rと固定して、φ=10°、20°、30°、40°、50°と変動させていくと、ボールベアリング16の外輪の一点のYZ平面に投影した運動により生成される軌道は、図7に示される曲線EL10、EL20、EL30、EL40、EL50のようになる。
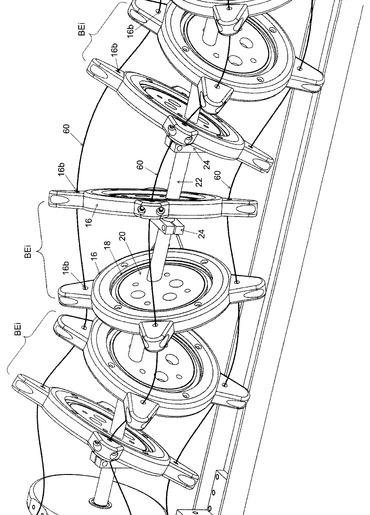
本発明に係る回転波動機構の一例においては、可撓性カバー部材CCiが複数の揺動板ユニットBEi相互間を連結し、内部空間を密封する構成とされるが、斯かる例に限られることなく、例えば、作業ロボットにおいて防塵防水性が要求されない環境にあっては、図10に示されるように、複数の揺動板ユニットBEiにおける突起部16PA、16PB、16PC、および16PCが、各貫通孔16bに挿入された可撓性の線状部材60によって互いに連結されてもよい。可撓性連結部材としての線状部材60は、例えば、金属、プラスチック等で作られてもよい。なお、図10においては、図1および図4において示される構成要素と同一の構成要素について同一の符号を付して示し、その重複説明を省略する。
【0018】
従来技術において、ヘビ型ロボットは、多数の能動屈曲関節を必要とするため高価になりやすく、また体幹を滑らせて動くため移動効率が低い。クローラ型ロボットは、クローラの部分の防塵防水性を向上することが難しく、雨天時や埃の激しい環境での移動は難しい。また、クローラ型ロボットは、転倒するとき、逆向きに動き出す虞がある。多輪型ロボットは、多数の駆動モータを必要とし、車輪が接地するような姿勢保持が必要で、転倒したりすると、移動できなくなる場合があるなどの問題点を有していた。
しかし、本発明に係る回転波動機構の一例が適用されたムカデ型ロボットは、上述したように軸回転運動で多数の脚(突起)をすべて歩行運動させることができるので少ない駆動系で推進ができ、しかも、ゴムチューブで蔽われて回転部分が外に出たりしないので完全防塵防水型である。
さらに、ムカデ型ロボットにおける体幹全体が、すべて推進方向に推進力を生成するなどの特徴を有するのでムカデ型ロボットは、従来の方式で残された課題をすべて解決できる画期的な特性を発揮するロボットとなる。
なお、上述の本発明に係る回転波動機構の一例においては、3個の回転揺動ユニットが連結されているが、必ずしもこのように構成される必要がなく、例えば、2個の回転揺動ユニット、あるいは、4個以上の回転揺動ユニットが連結されてもよいことは勿論である。
また、上述の本発明に係る回転波動機構の一例においては、複数の揺動板ユニットBEiは、互いに同一構造を有するものとしたが、必ずしもこれに限定されるものでなく、回転揺動ユニットA1の中央部分に設けられる揺動板ユニットBEiの偏心量εや傾斜角度φよりも、エンドプレート30および32に近い部分の揺動板ユニットBEiの偏心量εや傾斜角度φを少なめに設定しておく構成も可能である。こうすると、回転揺動ユニットA1に沿って生成される進行波が、一端の固定されたエンドプレートから滑らかに始まり、他端のエンドプレートに滑らかに終息するように生成することになる。また、上述の本発明に係る回転波動機構の図1から図4に示す回転揺動ユニットA1では、センターパイプ22は直線状に記述しているが、これは、必ずしも直線に限定するものではなく曲線状であっても良い。また、このセンターパイプ22を能動屈曲可能とすることで、能動屈曲部10なしでも進行方向が変えられる回転波動機構も実現できる。
また、上述の本発明に係る回転波動機構の一例においては、突起部がボールベアリング16の外輪の外周部の円周上に均等に4箇所に設けられているが、斯かる例に限られることなく、例えば、外部に向けて突出する突起部が、ボールベアリング16の外輪の外周部に直接設けられるのではなく、ボールベアリング16の外輪の外周部を覆う可撓性カバー部材CCiを介して設けられてもよい。
【符号の説明】
【0019】
10 能動屈曲部
16 ボールベアリング
16PA,16PB,16PC,16PC 突起部
20 揺動円板
22 センターパイプ
36 推進用モータ
60 線状部材
A1,A2,A3 回転揺動ユニット
BEi 揺動板ユニット
CCi 可撓性カバー部材
【技術分野】
【0001】
本発明は、推進運動を生成する回転波動機構に関する。
【背景技術】
【0002】
床下の白アリ被害の検査、屋根裏の点検、建築物の配線工事、健全性検査、床下天井裏などの補修作業、あるいは、災害時の救助活動などのための瓦磯内の探査の場合、ロボットを作業および救助活動に用いることが、提案されている。そのようなロボットとしては、代表的に、ヘビ型ロボット、クローラ型ロボット、多輪型ロボットなどが提案されている。
また、上述のロボットは、狭隘な環境に潜り込んで行わなければならない作業が少なからず存在するのでジャッキアップ移動方式のロボットが提案されている。ジャッキアップ移動方式のロボットは、例えば、非特許文献1にも示されるように、複数の偏心カムの回転運動により、相対向する2枚のプレートを互いに離隔する方向または近接する方向に移動させながら、推進するものとされる。即ち、偏心カムの回転運動で、カムの回転軸の周りの揺動運動を生成することにより、低速だが強力な歩行的な推進運動が生成される。
くも型ロボットにおいては、例えば、特許文献1にも示されるように、4本の脚部が両側部に移動可能に設けられるフレームと、フレームの両側部にそれぞれ設けられ各脚部の一端が連結される平歯車と、その平歯車相互間に配される互いに同一のモジュールの中間平歯車とからなる歯車列と、8本の脚部が上下動するように各歯車列を回動させる複数の回転手段とを含んで構成されるものが提案されている。即ち、このような一対の歯車列により、各脚部の一端が連結される平歯車から、足の運動における位相の違う動きを取り出して足の動きが生成される。
くも型ロボットにおいては、例えば、特許文献2にも示されるように、4本の脚部が両側部に移動可能に設けられる本体と、各脚部の一端が案内される溝を有する複数個の溝付きカムと、複数個の溝付きカムを回動させる回転軸の一端に設けられる歯車列と、歯車列に回動力を供給するモータとを含んで構成されるものが提案されている。これにより、複数の連動するカムの運動に従動するカムフォロアの運動から、8本の足の運動が生成される。
【0003】
そして、例えば、特許文献3にも示されるように、横方向波動を発生させる波動発生装置が提案されている。この装置は、可撓性平坦部材と、一方の端部が可撓性平坦部材に固着され、他方の端部が各平行ビームにそれぞれ、枢着される複数の駆動ロッドと、各平行ビームの一端部に取り付けられるクランクアッセンブリーと、クランクアッセンブリーに連結されるギアモータとを含んで構成される。このような構成において、ギアモータが作動状態とされる場合、複数の平行ビームにおける非拘束端部が、回転軸に対し垂直な面で楕円運動することによって、可撓性平坦部材に横方向波動を生じさせることとなる。即ち、この装置は、一つの回転軸の運動から、クランクアッセンブリーにおいて複数の位相を順に変えた偏心円盤を回転することによって波動運動を生成させるアイデアが示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第5423708号公報
【特許文献2】米国特許第3331463号公報
【特許文献3】米国特許第6689076号公報
【非特許文献】
【0005】
【非特許文献1】「狭隘空間におけるジャッキアップ移動体:Bari-bari-I の開発」、著者:塚越 秀行, 天野 裕輔, 田中 崇裕,北川 能: ロボメカ講演会 2004 2P1-H-42
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1乃至特許文献3、非特許文献1において提案された装置は、偏心カム、溝付きカム等を回転させる軸と直交する方向に波動運動を生成するものなので作業ロボットにおいてそのような機構を適用した場合、回転運動を所望の推進方向に変換する機構が必要となるので推進運動を生成する機構を複雑な構成とする虞がある。また、クローラ型ロボットにおいて、クローラの部分の防塵防水性を達成することが難しく、同様に、上述のくも型ロボットにおいても、本体から外部に突出した脚部が本体に対し上下運動をするので本体について防塵防水性を保つことが難しいという問題を伴う。
【0007】
以上の問題点を考慮し、本発明は、推進運動を生成する回転波動機構であって、推進運動を生成する機構を複雑な構成とすることなく、しかも、適用された作業ロボットの防塵防水性を達成でき、さらに、外部に接する外周のすべての部分で表面波動を生成出来る回転波動機構を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述の目的を達成するために、本発明に係る回転波動機構は、駆動力供給部からの回動力が伝達される駆動回転軸と、駆動回転軸の軸線に沿った所定の間隔をもって駆動回転軸の軸線と交差するように駆動回転軸に固定される複数の揺動円板と、各揺動円板の外周部に回動可能に配され揺動円板の運動に追従する回動部材と、回動部材の回転を所定の回転角に制限するとともに隣接する回動部材を直列に連結する可撓性連結部材と、を備え、揺動円板の中心位置が駆動回転軸の中心軸線に対し所定距離、偏心した状態で、揺動円板および回動部材に連なる共通の平面が駆動回転軸の中心軸線に対し所定の傾斜角度をなすように複数の揺動円板が駆動回転軸に固定されることを特徴とする。
【発明の効果】
【0009】
本発明に係る回転波動機構によれば、駆動力供給部からの回動力が伝達される駆動回転軸と、駆動回転軸の軸線に沿った所定の間隔をもって駆動回転軸の軸線と交差するように駆動回転軸に固定される複数の揺動円板と、各揺動円板の外周部に回動可能に配され揺動円板の運動に追従する回動部材と、回動部材の回転を所定の回転角に制限するとともに回動部材を直列に連結する可撓性連結部材と、を備えて構成されるので推進運動を生成する機構を複雑な構成とすることなく、外部に接する外周のすべての部分で表面波動を生成し、しかも、可撓性連結部材によって駆動回転軸、複数の揺動円板、および、回動部材を覆うことも可能なので適用された作業ロボットの防塵防水性を達成できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの内部の構成を示す断面図である。
【図2】図1に示されるムカデ型作業ロボットの外観を示す斜視図である。
【図3】図1に示されるムカデ型作業ロボットにおける能動屈曲部の構成を示す斜視図である。
【図4】図1に示されるムカデ型作業ロボットにおける揺動板ユニットを示す斜視図である。
【図5】(A)は揺動円板とセンターパイプとの位置関係の説明に供される図であり、(B)は、(A)に示される図の正面図である。
【図6】φ=20°で固定して、ε=0.1r,0.2r,0.3r,0.4r、0.5rと変動した場合、それぞれ、生成される軌道曲線を示す。
【図7】ε=0.2rで固定して、φ=10°、20°、30°、40°、50°と変動した場合、それぞれ、生成される軌道曲線を示す。
【図8】Z軸の周りに進行方向に沿って放射状に回転軌跡を生成する運動の説明に供される図である。
【図9】図4におけるIX−IX線に沿って示される断面図である。
【図10】本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの他の一例の要部を示す斜視図である。
【発明を実施するための形態】
【0011】
図2は、本発明に係る回転波動機構の一例が適用されたムカデ型作業ロボットの外観を概略的に示す。
図2において、ムカデ型作業ロボット(以下にロボットともいう)は、進行方向の先端部に設けられ進行方向の環境を固体撮像素子等により撮影し撮像データを得るカメラ部12と、カメラ部12に一端が連結される回転揺動ユニットA1と、回転揺動ユニットA1の他端に連結される能動屈曲部10と、回転揺動ユニットA1に連結された能動屈曲部10の他端に連結される回転揺動ユニットA2と、回転揺動ユニットA2に能動屈曲部10を介して連結される回転揺動ユニットA3とを含んで構成される。
能動屈曲部10は、図1および図3に示されるように、例えば、回転揺動ユニットA1と回転揺動ユニットA2とを連結するとともに、後述する回転揺動ユニットA1における中心駆動回転軸としてのセンターパイプ22を回動させるものとされる。なお、最後端に設けられた能動屈曲部10は、回転揺動ユニットA3を駆動するものとされ、また、回転揺動ユニットA3と回転揺動ユニットA2との間に設けられた能動屈曲部10は、回転揺動ユニットA2を駆動するものとされる。
能動屈曲部10は、後述する回転揺動ユニットA1における端部に設けられる歯車減速機構に連結されるギヤボックス50と、上述の歯車減速機構を介してセンターパイプ22を回動させる推進用モータ36と、回転揺動ユニットA1と隣接する回転揺動ユニットA2とのなす傾斜角度を調整する角度調整機構と、角度調整機構の一部を構成する2本のボールねじをそれぞれ、個別に駆動させる角度調整用モータ38と、を含んで構成されている。
【0012】
円筒状のギヤボックス50内には、推進用モータ36の突出した出力軸36Sに連結されるピンオンギヤ54と、角度調整用モータ38の出力軸38Sに連結されるタイミングベルトプーリ38Pと、各伝達軸44の一端に連結されたタイミングベルトプーリ46とが配されている。
出力軸36Sは、回転揺動ユニットA1における端部に向けてギヤボックス50の端部を貫通し支持軸14に対し略平行に突出している。各出力軸38Sは、出力軸36Sに対し所定距離、離隔した位置で略平行にギヤボックス50の端部を貫通し突出している。各出力軸38Sは、所定距離、互いに離隔してギヤボックス50内に配されている。
【0013】
各伝達軸44の一端は、それぞれ、各出力軸38Sに対し略平行にギヤボックス50の端部を貫通しギヤボックス50の内側に突出している。タイミングベルトプーリ46とタイミングベルトプーリ38Pとの間には、タイミングベルト48が巻き掛けられている。これにより、角度調整用モータ38の出力軸38Sからの回動力が各伝達軸44に伝達される。各伝達軸44の両端は、ギヤボックス50の端部およびブラケット52の軸受孔52aにより回動可能に支持されている。各伝達軸44の他端には、ユニバーサルジョイント40およびボールねじ42Sが連結されている。ボールねじ42Sは、ナット42Nに回動可能に嵌めあわされている。各ナット42Nの端部は、ユニバーサルジョイント40を介して隣接する回転揺動ユニットA2のエンドキャップ34に連結されている。
推進用モータ36は、ギヤボックス50の端部に支持されるとともに、ブラケット52により支持されている。また、推進用モータ36における回転揺動ユニットA2に対向する端部も、ユニバーサルジョイント40を介して回転揺動ユニットA2のエンドキャップ34に連結されている。
【0014】
推進用モータ36および角度調整用モータ38は、図示が省略される制御回路部により駆動制御される。これにより、推進用モータ36および角度調整用モータ38が作動状態とされる場合、回転揺動ユニットA1におけるセンターパイプ22が回動されるとともに、ボールねじ42Sに対しナット42Nが移動されることにより、回転揺動ユニットA2のエンドキャップ34と能動屈曲部10とのなす角度が変化するので回転揺動ユニットA1と隣接する回転揺動ユニットA2とのなす傾斜角度が調整される。
ブラケット52および推進用モータ36および角度調整用モータ38の周囲の内部空間は、伸縮および密封可能な可撓性カバー部材JC、例えば、ゴムチューブ、あるいは、ベローズチューブにより密封されている。
回転揺動ユニットA1、回転揺動ユニットA2、および、回転揺動ユニットA3は、互いに同一の構成を有するので回転揺動ユニットA1について説明し、回転揺動ユニットA2、および、回転揺動ユニットA3についての説明を省略する。
回転揺動ユニットA1は、図1に示されるように、両端がエンドプレート30および32により支持され内部中央を長手方向に沿って延在する支持軸14と、支持軸14におけるエンドプレート30側の端部にベアリング28を介して回動可能に支持されるギアケースGCと、支持軸14におけるエンドプレート32側の端部にベアリング28を介して回動可能に支持されるセンターパイプ受け部26Bと、支持軸14の周囲を覆うように回動可能に配され複数の揺動板ユニットBEi(i=1〜n,nは正の整数)を支持するセンターパイプ22と、可撓性連結部材として伸縮および密封可能な可撓性カバー部材CCi(i=1〜n,nは正の整数)とを含んで構成されている。
ギアケースGCは、ギヤボックス50の端部に向き合うエンドプレート30の内面側に配され、ピンオンギヤ54に噛み合う歯車列からなる歯車減速機構を収容する。これにより、ピンオンギヤ54から伝達された回動力は、歯車列を介してギアケースGCに伝達されることにより、ギアケースGCが支持軸14を中心として回動される。ギアケースGCは、一端にセンターパイプ22の一端を支持するセンターパイプ受け部26Aを有している。これにより、駆動回転軸としてのセンターパイプ22の両端が、それぞれ、センターパイプ受け部26Aおよび26Bに嵌合されることにより、センターパイプ22が、ギアケースGCのセンターパイプ受け部26A、および、26Bを介して回動可能に支持されることとなる。
【0015】
可撓性連結部材としての可撓性カバー部材CCiは、例えば、例えば、ゴムチューブ、あるいは、ベローズチューブとされ、後述する揺動板ユニットBEi相互間、揺動板ユニットBEiとエンドプレート32との間、および、揺動板ユニットBEiとエンドプレート30との間の内部空間をそれぞれ、密封する。また、可撓性カバー部材CCiは、後述する揺動板ユニットBEiにおけるボールベアリング16の外輪におけるセンターパイプ22を中心とした軸回りの回転を所定の回転角度範囲内に拘束する。
複数の揺動板ユニットBEiは、互いに同一構造を有するものとされる。また、隣接する一対の揺動板ユニットBEiは、図4に示されるように、所定の位相角度差、例えば、90度の位相角度差をもってセンターパイプ22に所定の間隔、例えば、約50mm間隔で配されている。
揺動板ユニットBEiは、図4および図9に示されるように、センターパイプ22に固定される揺動円板20と、揺動円板20の外周部に嵌合される内輪18を有するボールベアリング16と、回動部材としてのボールベアリング16の外輪の外周部の円周上に均等に4箇所、設けられる突起部16PA、16PB、16PC、および16PCとを含んで構成されている。
揺動円板20は、図5(B)に示されるように、センターパイプ22に対し所定距離εだけ偏心した位置に中心があり、図5(A)に示されるように、センターパイプ22に対し所定の角度φだけ傾斜している。即ち、揺動円板20におけるセンターパイプ22が貫通する孔20aは、図9に示されるように、中心軸線に対し傾斜するように形成されている。揺動円板20は、センターパイプ22に固定されるクランプ部材24の一端で係止されている。
【0016】
突起部16PA、16PB、16PC、および16PCは、それぞれ、センターパイプ22の軸線方向に対し交わるように貫通した貫通孔16bを有している。即ち、貫通孔16bは、ボールベアリング16の外輪の両端面に対し略直交するように形成されている。
これにより、揺動円板20が、センターパイプ22の回動に連なって回動した場合、
すべての突起部16PA、16PB、16PC、および16PCは、中心軸から外側に向かう往復運動と中心軸に沿った往復運動を組み合わせた歩行型回転運動を生成する。そのため、このような回転揺動ユニットが外部に接触すると、進行方向と一致する軸方向への推進力を生成することとなる。従って、能動屈曲部10で回転揺動ユニットA1〜A3を直列に連結して屈曲して操舵できるように構成したムカデ形ロボットは、防塵防水性を達成しながら、狭隘環境においても移動することが可能となる。
本発明に係る回転波動機構の一例は、図8に示されるように、Z軸が回転するセンターパイプ22だったとすると、X軸、Y軸により形成されるX、Y平面に回転運動を生成するのではなく、Z軸の周りに進行方向に沿って放射状に回転軌跡RLを生成する運動を生成する表面波機構である。
【0017】
即ち、表面波機構の原理は、図5(B)のようにZ軸(センターパイプ22)に対して、中心をεだけ偏心させ、さらに角度φだけ傾けて固定した揺動円板のZ軸を回転したときの外周部の運動を利用するものである。上述したように、この揺動円板の外周にはボールベアリングが取り付けられ、さらに外輪が軸周りに回転しないが上下左右そして軸方向に動けるように取り付けられている。このような構成により、図5(B)のZ軸周りの回転で揺動円板が回転したとき、ボールベアリング16の外輪の一点のYZ平面に投影した運動は、楕円軌道を描く。そのため、Z軸に沿って複数の揺動円板を一定位相ずらしながら取り付けた回転揺動ユニットの中心軸を回転させるとき、回転揺動ユニットの外周に取り付けられた突起部すべてが、ムカデの足のような歩行型回転運動を、軸から外側に向かって生成する。この運動はあたかも表面波を構成するものであるためこの機構が表面波機構と呼ばれる。
偏心量εと傾きφとで生成される波形(楕円軌道)の高さh、幅wの関係は、次式(1)、(2)で表せる。
h=(r+ε)−(r−ε)=2ε …(1)
w=2rsinφ …(2)
波形(楕円軌道)の高さhは、偏心量εの2倍であり、ここで、rは、揺動円板20の半径である。
例えば、φ=20°で固定して、ε=0.1r,0.2r,0.3r,0.4r、0.5rと変動した場合、ボールベアリング16の外輪の一点のYZ平面に投影した運動により生成される軌道は、それぞれ、図6に示される楕円曲線EL0.1、EL0.2、EL0.3、EL0.4、EL0.5のようになる。
逆に、ε=0.2rと固定して、φ=10°、20°、30°、40°、50°と変動させていくと、ボールベアリング16の外輪の一点のYZ平面に投影した運動により生成される軌道は、図7に示される曲線EL10、EL20、EL30、EL40、EL50のようになる。
本発明に係る回転波動機構の一例においては、可撓性カバー部材CCiが複数の揺動板ユニットBEi相互間を連結し、内部空間を密封する構成とされるが、斯かる例に限られることなく、例えば、作業ロボットにおいて防塵防水性が要求されない環境にあっては、図10に示されるように、複数の揺動板ユニットBEiにおける突起部16PA、16PB、16PC、および16PCが、各貫通孔16bに挿入された可撓性の線状部材60によって互いに連結されてもよい。可撓性連結部材としての線状部材60は、例えば、金属、プラスチック等で作られてもよい。なお、図10においては、図1および図4において示される構成要素と同一の構成要素について同一の符号を付して示し、その重複説明を省略する。
【0018】
従来技術において、ヘビ型ロボットは、多数の能動屈曲関節を必要とするため高価になりやすく、また体幹を滑らせて動くため移動効率が低い。クローラ型ロボットは、クローラの部分の防塵防水性を向上することが難しく、雨天時や埃の激しい環境での移動は難しい。また、クローラ型ロボットは、転倒するとき、逆向きに動き出す虞がある。多輪型ロボットは、多数の駆動モータを必要とし、車輪が接地するような姿勢保持が必要で、転倒したりすると、移動できなくなる場合があるなどの問題点を有していた。
しかし、本発明に係る回転波動機構の一例が適用されたムカデ型ロボットは、上述したように軸回転運動で多数の脚(突起)をすべて歩行運動させることができるので少ない駆動系で推進ができ、しかも、ゴムチューブで蔽われて回転部分が外に出たりしないので完全防塵防水型である。
さらに、ムカデ型ロボットにおける体幹全体が、すべて推進方向に推進力を生成するなどの特徴を有するのでムカデ型ロボットは、従来の方式で残された課題をすべて解決できる画期的な特性を発揮するロボットとなる。
なお、上述の本発明に係る回転波動機構の一例においては、3個の回転揺動ユニットが連結されているが、必ずしもこのように構成される必要がなく、例えば、2個の回転揺動ユニット、あるいは、4個以上の回転揺動ユニットが連結されてもよいことは勿論である。
また、上述の本発明に係る回転波動機構の一例においては、複数の揺動板ユニットBEiは、互いに同一構造を有するものとしたが、必ずしもこれに限定されるものでなく、回転揺動ユニットA1の中央部分に設けられる揺動板ユニットBEiの偏心量εや傾斜角度φよりも、エンドプレート30および32に近い部分の揺動板ユニットBEiの偏心量εや傾斜角度φを少なめに設定しておく構成も可能である。こうすると、回転揺動ユニットA1に沿って生成される進行波が、一端の固定されたエンドプレートから滑らかに始まり、他端のエンドプレートに滑らかに終息するように生成することになる。また、上述の本発明に係る回転波動機構の図1から図4に示す回転揺動ユニットA1では、センターパイプ22は直線状に記述しているが、これは、必ずしも直線に限定するものではなく曲線状であっても良い。また、このセンターパイプ22を能動屈曲可能とすることで、能動屈曲部10なしでも進行方向が変えられる回転波動機構も実現できる。
また、上述の本発明に係る回転波動機構の一例においては、突起部がボールベアリング16の外輪の外周部の円周上に均等に4箇所に設けられているが、斯かる例に限られることなく、例えば、外部に向けて突出する突起部が、ボールベアリング16の外輪の外周部に直接設けられるのではなく、ボールベアリング16の外輪の外周部を覆う可撓性カバー部材CCiを介して設けられてもよい。
【符号の説明】
【0019】
10 能動屈曲部
16 ボールベアリング
16PA,16PB,16PC,16PC 突起部
20 揺動円板
22 センターパイプ
36 推進用モータ
60 線状部材
A1,A2,A3 回転揺動ユニット
BEi 揺動板ユニット
CCi 可撓性カバー部材
【特許請求の範囲】
【請求項1】
駆動力供給部からの回動力が伝達される駆動回転軸と、
前記駆動回転軸の軸線に沿った所定の間隔をもって該駆動回転軸の軸線と交差するように前記駆動回転軸に固定される複数の揺動円板と、
前記各揺動円板の外周部に回動可能に配され該揺動円板の運動に追従する回動部材と、
前記回動部材の回転を所定の回転角に制限するとともに隣接する該回動部材を直列に連結する可撓性連結部材と、を備え、
前記揺動円板の中心位置が前記駆動回転軸の中心軸線に対し所定距離、偏心した状態で、該揺動円板および前記回動部材に連なる共通の平面が前記駆動回転軸の中心軸線に対し所定の傾斜角度をなすように前記複数の揺動円板が前記駆動回転軸に固定されることを特徴とする回転波動機構。
【請求項2】
前記駆動回転軸と、前記複数の揺動円板と、前記回動部材と、前記可撓性連結部材とをそれぞれ、含んでなる複数の回転揺動ユニットを備え、該複数の回転揺動ユニットは、一方の回転揺動ユニットと隣接する他方の回転揺動ユニットとがなす角度を調整する能動屈曲部を介して連結されることを特徴とする請求項1記載の回転波動機構。
【請求項3】
前記可撓性連結部材は、前記駆動回転軸と、前記複数の揺動円板と、前記回動部材とを覆い、形成される内部空間を密封するベローズチューブであることを特徴とする請求項1記載の回転波動機構。
【請求項4】
複数の突起部が、前記回動部材を覆う前記可撓性連結部材の外周部において該回動部材の円周方向に沿って設けられることを特徴する請求項1または請求項2記載の回転波動機構。
【請求項5】
前記可撓性連結部材は、線状部材であることを特徴とする請求項1記載の回転波動機構。
【請求項1】
駆動力供給部からの回動力が伝達される駆動回転軸と、
前記駆動回転軸の軸線に沿った所定の間隔をもって該駆動回転軸の軸線と交差するように前記駆動回転軸に固定される複数の揺動円板と、
前記各揺動円板の外周部に回動可能に配され該揺動円板の運動に追従する回動部材と、
前記回動部材の回転を所定の回転角に制限するとともに隣接する該回動部材を直列に連結する可撓性連結部材と、を備え、
前記揺動円板の中心位置が前記駆動回転軸の中心軸線に対し所定距離、偏心した状態で、該揺動円板および前記回動部材に連なる共通の平面が前記駆動回転軸の中心軸線に対し所定の傾斜角度をなすように前記複数の揺動円板が前記駆動回転軸に固定されることを特徴とする回転波動機構。
【請求項2】
前記駆動回転軸と、前記複数の揺動円板と、前記回動部材と、前記可撓性連結部材とをそれぞれ、含んでなる複数の回転揺動ユニットを備え、該複数の回転揺動ユニットは、一方の回転揺動ユニットと隣接する他方の回転揺動ユニットとがなす角度を調整する能動屈曲部を介して連結されることを特徴とする請求項1記載の回転波動機構。
【請求項3】
前記可撓性連結部材は、前記駆動回転軸と、前記複数の揺動円板と、前記回動部材とを覆い、形成される内部空間を密封するベローズチューブであることを特徴とする請求項1記載の回転波動機構。
【請求項4】
複数の突起部が、前記回動部材を覆う前記可撓性連結部材の外周部において該回動部材の円周方向に沿って設けられることを特徴する請求項1または請求項2記載の回転波動機構。
【請求項5】
前記可撓性連結部材は、線状部材であることを特徴とする請求項1記載の回転波動機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−240158(P2012−240158A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−112321(P2011−112321)
【出願日】平成23年5月19日(2011.5.19)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月19日(2011.5.19)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]