
回転照射型粒子線医療装置
【課題】静止リングの回転を検知し、移動床を水平に保つように制御する。
【解決手段】治療台の周りに回転するフレーム1と、フレーム1の内側のガイドリングに回転自在に支持されてフレーム1の回転に同期して逆回転し、固定部に対して相対的に静止状態が保たれる静止リング13と、静止リング13に支持された移動床14とを備え、固定部側から静止リング13を見て、静止リング13が時計方向に回転するのを検知する光電センサと、反時計方向に回転するのを検知する光電センサを各1個以上固定部側に配設し、各光電センサに対向する静止リング13の面に回転方向に対して長い反射板20a〜20dを設け、各反射板は、反射点21を中心から偏らせることで静止リング13が固定部に対して相対的に回転しても反射を継続して回転を検知させない不感帯を設けた。
【解決手段】治療台の周りに回転するフレーム1と、フレーム1の内側のガイドリングに回転自在に支持されてフレーム1の回転に同期して逆回転し、固定部に対して相対的に静止状態が保たれる静止リング13と、静止リング13に支持された移動床14とを備え、固定部側から静止リング13を見て、静止リング13が時計方向に回転するのを検知する光電センサと、反時計方向に回転するのを検知する光電センサを各1個以上固定部側に配設し、各光電センサに対向する静止リング13の面に回転方向に対して長い反射板20a〜20dを設け、各反射板は、反射点21を中心から偏らせることで静止リング13が固定部に対して相対的に回転しても反射を継続して回転を検知させない不感帯を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、がん治療等で使用される粒子線医療装置、特に、患者周りに回転自在に照射可能な回転照射型粒子線医療装置に関するものである。
【背景技術】
【0002】
近年、がん治療を目的とした放射線医療装置では陽子や重イオンを用いたがん治療装置の開発や建設が進められている。周知のとおり、陽子や重イオン等を用いた粒子線治療はX線、ガンマ線等の従来の放射線治療に比べて、がん患部に集中的に照射することができ、正常細胞に影響を与えずに治療することが可能である。
粒子線医療装置には、患者に対して任意の方向から照射するために回転照射装置(回転ガントリ)が設けられる場合が多い。回転ガントリは粒子線照射部を360度回転させ、患者に対して任意の回転角度から荷電粒子ビームを照射できるように構成されている。
【0003】
上記のように、粒子線照射部を360度回転させ、患者に対して任意の回転角度から照射可能とした場合、患者が固定される治療台は、回転する照射部に対して固定させておく必要があるため、建屋側に設けた固定部側から張り出した構成になる。したがって、治療を行う医者もしくは放射線技師などが、常に患者に近づいて作業ができるようにアクセスフロアが設けられるが、このアクセスフロアは回転ガントリの回転角度に係わらず常に水平を保っておく必要がある。
【0004】
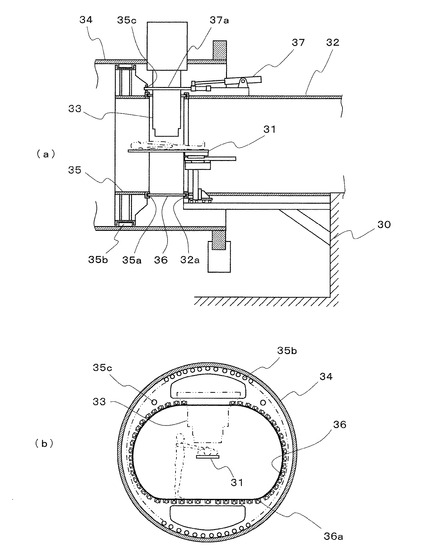
例えば、図8は特許文献1に示された従来の回転照射装置を示す構成図である。(a)は主要部の側面断面図であり、(b)は(a)の移動床部の正面断面図である。回転照射装置は、一端側が建屋の壁30に支持され、内部に治療用ベッド31を備えた固定胴32と、粒子線照射部33を支持する回転胴34と、この回転胴34の内側にあって、回転胴34の回転にかかわらず固定胴32から見て静止状態を保つガイドレール支持胴35と、固定胴32とガイドレール支持胴35との間に配設され、その上部を貫通する粒子線照射部33の回転に合わせて移動する屈曲自在な無端状の移動床36とで構成されている。
【0005】
移動床36を更に詳しく説明する。固定胴32の端部には、下側が水平で上側に円弧部を有し、ガイドレール支持胴35側に開口部を有するコの字状断面をした固定胴側ガイドレール32aが設けられている。一方、その対向面であるガイドレール支持胴35側にも同様な形状の回転胴側ガイドレール35aが設けられている。移動床36の両側に設けたガイドローラ36a(図(b)参照)をガイドレール32a,35aに係合させているので、移動床36は、粒子線照射部33の回転と同期して両ガイドレール32a,35aに沿って移動するが、下側は常に水平なアクセスフロアが形成されている。
【0006】
ガイドレール支持胴35は、その外周に、回転胴34の内周面を転動する複数の支持ローラ35bが設けられており、回転胴34に対して相対的に回転可能になっている。しかし、回転胴34が回転しても、固定胴32側から見てガイドレール支持胴35が静止状態を保つように、電動シリンダ37を固定胴32の上部に配設し、係止ロッド37aを作動させ、ガイドレール支持胴35側に設けた係合穴35cに挿入して係止するロック機構を備えている。これにより、回転胴34と共に粒子線照射部33が回転し、その回転に同期して移動床36が移動しても、移動床36の下側を水平に維持し続けることができるようになっている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−129103号公報(第3頁、図1−3)
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に示すような粒子線治療用回転照射室では、治療ベッド31を囲うように移動床36が回転するため、移動床36についた埃やゴミなどが治療ベッド上に落ちてくるという問題があった。また、このように移動床を回転させるのは大掛かりであり、音がうるさいという問題もあった。この問題に対しては、ガイドレール支持胴35側から、必要に応じて水平な移動床を固定胴32側へ出し入れするようにしてアクセスフロアを実現するものが提案されている。
しかし、いずれの従来技術においても、回転照射を実現する機構である回転ガントリは、照射部を搭載して共に回転する略円筒形の回転胴と、この回転胴の内部の中間位置に内接するように配設された支持胴からなっている。照射位置が回転胴の内部にあるため、治療ベッドは建屋側の固定床側からオーバーハングするように回転胴の中に突き出す必要かある。固定胴と支持胴との間に設けられる移動床は、固定胴の床面とつながり水平に保たれてアクセスフロアとしての意味をなすため、移動床を支持する支持胴は固定胴から見て静止している必要かある。
【0009】
支持胴を見かけ上静止させるためには大きくわけて2つの方法かある。1つは上記特許文献1に示すように、棒状の係止ロッドを支持胴の係合穴に係合させて回転を阻止する方法であり、もう1つは支持胴を回転胴と同期して逆方向に同じ角度だけ積極的に回す方法である。後者の場合は、係止ロッドを用いた構成に比べて高速かつスムースに照射部の回転を実現できる利点があるが、支持胴を駆動させるにあたり、もしもローラとレールとの間ですべりが生じると、所望の回転角度が得られず、結果として支持胴から出し入れされる移動床が水平を保てない虞があるという問題点があった。
【0010】
この発明は、上記のような問題点を解消するためになされたもので、何らかの原因で支持胴(本願の静止リング)が固定部に対して回転したとき、その回転を確実に検知し、移動床を水平に保つように制御できる回転照射型粒子線医療装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係わる回転照射型粒子線医療装置は、建屋側に固定された固定床及び固定床に設置された治療台を有する固定部と、粒子線を照射する照射装置が搭載され、治療台上の患者に対して粒子線を照射するように、照射装置と共に治療台の周りに回転するフレームと、フレームの内側に回転自在に支持されてフレームの回転に同期して逆回転し、固定部に対して相対的に静止状態が保たれる静止リングと、静止リングに支持され、照射装置の回転を妨げないように開閉又は移動する移動床とを備えた回転照射型粒子線医療装置であって、固定部側から回転軸の軸方向に静止リングを見て、静止リングが時計方向に回転するのを検知する反射型の光電センサ(CWセンサ)と、反時計方向に回転するのを検知する反射型の光電センサ(CCWセンサ)とが、各1個以上固定部側に配設され、光電センサに対向する静止リングの面に反射板が設けられ、反射板は、回転方向に対して一定の長さを有する反射板であり、光電センサからの光の反射点を長さ方向の中心から偏らせて静止リングに配置されており、静止リングが固定部に対して相対的に回転しても反射を継続して光電センサに回転を検知させない領域である不感帯を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯が設けられ、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯が設けられているものである。
【発明の効果】
【0012】
この発明の回転照射型粒子線医療装置によれば、回転方向に対して一定の長さを有する反射板が、光電センサからの光の反射点を長さ方向の中心から偏らせて静止リングに配置されており、静止リングが固定部に対して相対的に回転しても反射を継続して光電センサに回転を検知させない領域である不感帯を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯が設けられ、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯が設けられているので、移動床を水平に保つための静止リングが、何らかの原因で固定床に対して回転したとき、その回転を検知できると共に回転方向も容易に検知することができるので、回転方向と逆方向に静止リングの回転を制御することで、常に移動床を水平に維持することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1による回転照射型粒子線医療装置の回転ガントリ部を示す図で、(a)は回転軸に沿う方向に見た側面断面図、(b)は(a)のb−b方向から回転ガントリを観察した正面図である。
【図2】図1の静止リング部の斜視図である。
【図3】図1の静止リングに設けた反射板の詳細を示す図である。
【図4】図3の反射板の動作を説明する図である。
【図5】この発明の実施の形態2による回転照射型粒子線医療装置の、静止リングに設けた反射板の詳細を示す図である。
【図6】図5の反射板の動作を説明する図である。
【図7】反射板の別の例を示す図である。
【図8】従来の粒子線治療用回転照射室を示す図で、(a)は主要部の側面断面図、(b)は(a)の移動床部の正面断面図である。
【発明を実施するための形態】
【0014】
実施の形態1.
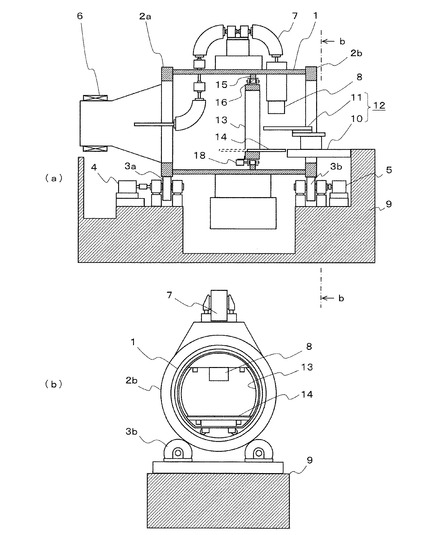
以下、この発明の実施の形態1の回転照射型粒子線医療装置を図に基づいて説明する。図1(a)は回転照射型粒子線医療装置の回転ガントリ全体を、回転ガントリの回転軸に沿う方向に見た側面断面図、図1(b)は回転軸に垂直な方向(b−b)から回転ガントリを観察した正面図である。また、図2は静止リング部の斜視図である。
【0015】
先ず、図1及び図2によって全体の構成を説明する。回転ガントリは、円筒状のフレーム1と、その両端部に固着された回転リング2a,2bと、一方の回転リング2aを受けるローラ3aと、そのローラ3aを回転駆動するモータや減速機が設けられたガントリ回転駆動装置4と、他方の回転リング2bを受けるローラ3bとブレーキや減速機が設けられたブレーキ装置5と、360度回転する回転ガントリ内へ配線及び配管を供給するケーブルスプール6と、回転ガントリに導入された荷電粒子ビームを輸送するビーム輸送機器7と、輸送された荷電粒子ビームを患者の照射患部にあわせて整形して照射する照射装置8とを備えている。
【0016】
一方、回転ガントリに対して、建屋9側には、固定床10が建屋9に支持固定されており、その上には患者を乗せる治療台11がフレーム1内へ出し入れ可能に設置されている。固定床10、治療台11、及びそれらを覆うように設けられた固定胴(図示せず)等で固定部12を構成している。
【0017】
フレーム1内には、フレーム1に対して回転自在に支持され、フレーム1の回転に同期して同じ角度だけ逆回転する静止リング13が設けられている。静止リング13はフレーム1に対して相対的に回転するが、固定部12から見るとフレーム1が回転しても常に静止しているように見えるため静止リングと称している。すなわち、固定部12に対して相対的に静止状態が保たれている。
静止リング13には、固定床10とほぼ同じ高さで、照射装置8の回転を妨げないように、照射装置8が通過するときに開閉する開閉式の移動床14が設けられている。
【0018】
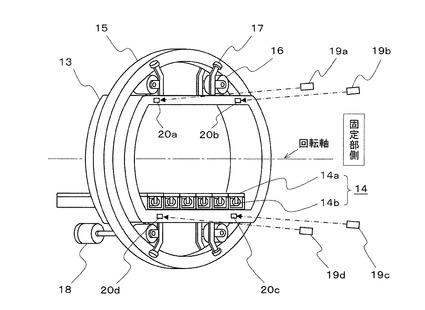
静止リング13と移動床14の構成を図2に基づいて更に詳しく説明する。静止リング13は、フレーム1の内面に固着されたガイドリング15の内側に配置されている。静止リング13には転動ローラ16とガイドローラ17が設けられており、ガイドローラ17にガイドされて転動ローラ16がガイドリング15の内周を転動することによりフレーム1内で回転自在になっている。駆動は、静止リング13に設けられた駆動モータ18により行われ、フレーム1の回転と同期させて逆方向に同じ角度だけ静止リング13を回転させることで、固定部12側から見れば、静止リング13は常に静止状態が保たれる。
静止リング13の床面側に設けられた開閉式の移動床14は、複数の床板14aに細分化されており、細分化された床板14aのそれぞれに設けられたエアーシリンダ14bの駆動により、固定床10側へスライド可能に構成されている。
【0019】
静止リング13は、上記のように固定床10と連続した移動床14を形成し、治療台11に対して十分なアクセスフロアを得るためのものである。したがって、水平な固定床10に対して、同じく水平度を保った移動床14とする必要がある。つまり、固定部12側から見て、静止リング13が相対的に回転しないように制御する必要があるので、静止リング13の水平度を監視するために、複数の反射型の光電センサ19(以下の説明では、個別の光電センサを指すときは符号に添字を付ける。反射板も同様)が固定部12側に配設され、光電センサ19と対向する静止リング13の面には、光電センサ19からのレーザビームを反射させる反射板20が設けられている。各光電センサと反射板の配置の詳細については後述する。なお、光電センサ19の光軸は、実際には静止リング13の回転軸と平行であるが、図2では分かりやすいようにずらして示している。
【0020】
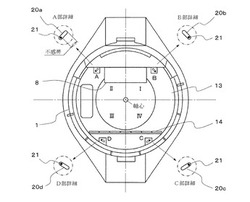
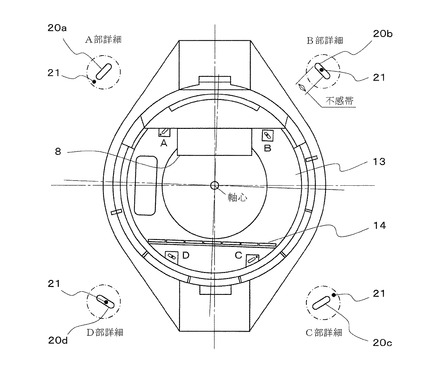
図3は、静止リング13に設ける反射板20の詳細を示す図であり、固定部12側から回転ガントリの内部の静止リング13側を見たものである。静止リング13の上部側にA,B、下部側にC,Dと合計4箇所に反射板20を配置している。当然、この反射板に対向する固定部12側に光電センサ19が配設されている。
光電センサ19は、固定部12側から回転軸の軸方向に静止リング13を見て、静止リング13が時計方向に回転するのを検知する反射型の光電センサ(以下、CWセンサと称す)と、反時計方向に回転するのを検知する反射型の光電センサ(以下、CCWセンサと称す)とで構成し、CWセンサとCCWセンサとを交互に配置している。すなわち、隣り合う光電センサは必ず一方がCWセンサ、他方がCCWセンサとなるように交互に配置する。図3では、A部とC部がCWセンサ用反射板20a,20cであり、これに対向する固定部12側にCWセンサ19a,19cが配置されている。また、B部とD部がCCWセンサ用反射板20b,20dであり、これに対向する固定部12側にCCWセンサ19b,19dが配置されている。
【0021】
4個の反射板20a〜20dは、できるだけ静止リング13の周縁部に分散して配置するのが望ましい。
好ましい例を挙げれば、反射板20が配置される静止リング13の面を、静止リング13の軸心を原点とする任意の直交座標系で4象限に区画したとき、反射板20は、各象限内に1個ずつ分散して配置するのがよい。図3で説明すれば、軸心に対して水平方向と垂直方向の直交座標系(水平,垂直に限定するものではなく任意でよい)を仮想したとき、I〜IVの各象限内に、B,A,D,Cと分散させて、且つ、CCWセンサ用反射板20b,20dとCW用反射板20a,20cを交互に配置している。
【0022】
A部を例に、反射板20を更に詳しく説明する。A部詳細図に示すように、長円で示す部分が反射板20aの反射面であり、黒丸で示す部分は光電センサ19aからの投光を反射する反射点21である。
光電センサ19は、投光部と受光部とを有する反射型の光電センサであり、反射点21からの反射光を受光し、受光の有無でON,OFF動作するものである。例えば、遮光時OFFタイプであれば、反射板が移動して反射光を受光できなくなればOFFとなる。
反射板20には、静止リングが回転しても反射を継続して、光電センサをON又はOFFに切り替わる動作をさせない領域が設けられている。この領域を不感帯と称することにする。すなわち、静止リング13が固定部12に対して回転しても不感帯内に反射点21があるときは、光電センサ20の信号が変化せず静止リング13の回転を検知しないようになっている。
【0023】
A部とC部にあるCWセンサ用反射板20a,20cは、静止シリング13の反時計方向の回転に対して不感帯が設けられ、時計方向の回転に対しては反射点21が直ちに反射板から外れるようになっている。逆に、B部とD部にあるCCWセンサ用反射板20b,20dは、静止リング13の時計方向の回転に対して不感帯が設けられている。
実際には、回転方向に対して一定の長さを有する反射板を用いて、反射点を反射板の中心ではなく図のように偏らせて静止リング13に配置すればよい。
なお、反射板20の形状は長円形として図示したが、これに限定するものではなく、静止リング13の回転に対して上記のような方向に不感帯を有するものであればどんな形状でも良い。
【0024】
次に動作について説明する。先ず始めに、図1及び図2により回転ガントリの回転動作から説明する。
回転ガントリに導入された荷電粒子ビームは、偏向電磁石や四極電磁石などよりなるビーム輸送機器7によって照射装置8まで輸送され、照射装置8で患者の照射患部の形状にあわせて整形された後に照射される。
患者は治療台11の上に固定されて位置決めが行われており、所定の照射患部に荷電粒子ビームが照射される。治療台11は、患者の照射患部が照射位置であるアイソセンタに一致するように動作させる必要があるため、通常は上下左右、前後、回転など多軸の位置決め動作が可能となっている。
【0025】
回転ガントリは、ガントリ回転駆動装置4を駆動し、ローラ3aを介して回転リング2aを回転させ、フレーム1と共にビーム輸送機器7及び照射装置8を回転させることで、患者に対して360度自在な方向からビームを照射することを可能とするもので、患者が仰向けの状態のまま様々な方向からビームを照射することができる。
このとき、治療を行う医者もしくは放射線技師などが、常に患者に近づいて作業ができるように、回転ガントリの回転角度に係わらず、常に水平を保ったアクセスフロアが必要となる。そこで、フレーム1内に配置した静止リング13の下部側に開閉可能に設けられた移動床14を、先に説明したように固定床10側に向けてスライドさせ、固定床10とほぼ同じ高さのアクセスフロアを形成する。静止リング13は、フレーム1の回転にかかわらず、固定部12側から見て常に静止状態を保つように制御することで、アクセスフロアが水平に保たれている。
【0026】
照射装置8が回転して患者より下部に来たときは、移動床14がそのままでは回転の妨げになるので、干渉を避けるため、照射装置8部の通過に合わせて移動床14を図1(a)に点線で示すように反固定床側にスライドさせる。このように、移動床14を開閉可能にし、閉状態で移動床14は治療台のアクセスフロアを形成することができるようになっている。
【0027】
次に、本願発明の特徴部分である光電センサ19の動作について説明する。
静止リング13を駆動する駆動モータ18にサーボモータ等を用いることにより、フィードバック制御することで、静止リング13の移動床14を固定部12側から見て水平に保つように制御できるが、フィードバック制御の僅かなタイムラグや転動ローラ16とガイドリング15との間ですべりが生じた場合等には、所望の回転角度が得られずに、結果として、固定部12側から見て静止リング13が所定の位置からどちらかの方向へ僅かに回転した状態(以下、この相対的な回転(ずれ)を単に回転と称す)となり水平な床面が得られなくなる。そこで、光電センサ20によってこの回転を検知して逆方向に制御することで、移動床14を常に水平に保つことが可能となる。
【0028】
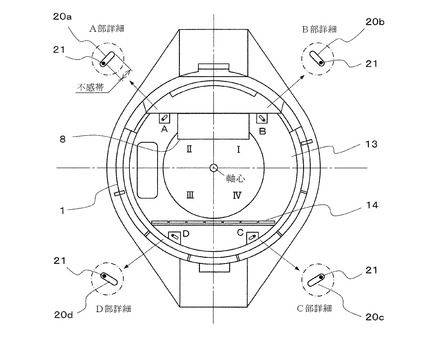
図4は、静止リング13に設けた反射板20の動作を説明する図である。図は、回転ガントリを図1(b)と同方向に見たとき、静止リング13が時計回り方向に回転した状態を示している。移動床14が水平を保っている図3の状態では、4個の光電センサ19の投光による反射点21はA〜D部全ての反射板20a〜20dの内部にあるので、各光電センサ19は(遮光時OFFタイプとして)反射光を受光して全てONとなっている。
図4のように時計方向に静止リング13が回転すれば、B部及びD部のCCWセンサ用反射板20b,20dcは、反射点21が不感帯部に移動するが反射板内に有るので、CCWセンサ19b,19dは作動しない。一方、A部及びC部のCWセンサ用反射板部20a,20cでは、反射点21が反射面から外れるので受光できなくなり、CWセンサ19a,19cはOFFとなる。このように、CWセンサがOFFとなり、且つCCWセンサがONであれば、静止リング13が時計方向に回転したことが分かる。
もし、反時計方向に回転すれば、CWセンサ19a,19cはONのままであるが、B部及びD部のCCWセンサ用反射板20b,20cが反射点21を外すので、CCWセンサ19b,19dがOFFとなり、静止リング13が反時計方向に回転したことを検知できる。
【0029】
上記のように、静止リングの回転(ずれ)の有無を検知すると共に、どちらの方向に回転したかを容易に検知することができるので、回転方向と逆方向に静止リング13の回転を制御することで、常に移動床14を水平に維持することができる。制御は、例えば、時計方向の回転を検知すれば、駆動モータ18の反時計方向への速度を増せばよい。
【0030】
次に、光電センサ19及び反射板20の設置個数について説明する。
CWセンサとその反射板、及びCCWセンサとその反射板が各1個以上有れば、上述したように、静止リング13の回転の有無と回転方向を検知できる。しかしながら、CWセンサとCCWセンサが各1個の場合は、照射装置8が回転したときいずれかの反射板が照射装置に遮られる場合が起こる。反射板が1個しか有効でない場合は、例え不感帯を設けても回転方向までは検知できない。更に、照射装置8の構造上、最悪の条件では隣り合う2個が照射装置に隠れる場合が生じる。静止リング13の回転の有無と回転方向を共に検知するためには、照射装置8が回転してどの位置にあっても、CWセンサ用反射板とCCWセンサ用反射板が必ず各1個は見えている必要がある。
【0031】
そこで、反射板を図3のように静止リングの周縁部に分散して4個配置し、且つ、CWセンサ用と、CCWセンサ用とを交互に配置すれば、隣り合う2個が照射装置で遮蔽されても、CWセンサ用と、CCWセンサ用の反射板が各1個は見えていることになり、静止リングの回転の有無と回転方向を共に検知できる。
更に、4個を配置するにあたり、先に説明したように、軸心を原点とする任意の直交座標系で4象限に区画した各象限内に1個ずつ分散して配置した場合は、照射装置8部が回転してどの角度にあっても、最低限隣り合う2個の反射板20は遮蔽されることなく、CWセンサとCCWセンサが確実に有効に作動する。
【0032】
以上のように、実施の形態1の回転照射型粒子線医療装置によれば、フレームの内側に回転自在に支持されて、移動床を支持する静止リングの回転を検知するために、固定部側から回転軸の軸方向に静止リングを見て、静止リングが時計方向に回転するのを検知する反射型の光電センサ(CWセンサ)と、反時計方向に回転するのを検知する反射型の光電センサ(CCWセンサ)とを、各1個以上固定部側に配設し、光電センサに対向する静止リングの面に反射板を設けたので、移動床を水平に保つための静止リングが、何らかの原因で固定床に対して回転してずれたとき、静止リングの回転(ずれ)を検知できると共に、回転方向を容易に検知することができるので、回転方向と逆方向に静止リングの回転を制御することで、常に移動床を水平に維持することができる。
【0033】
また、光電センサ及び反射板は各4個とし、反射板は、静止リングの周縁部にCWセンサ用反射板とCCWセンサ用反射板とを交互に配置したので、照射装置の回転によって隣り合う2個の反射板が遮蔽されても、CWセンサ用反射板とCCWセンサ用反射板が各1個は有効に働くので、静止リングの回転の有無と回転方向を共に検知できる。
【0034】
また、反射板が配置される静止リングの面を静止リングの軸心を原点とする任意の直交座標系で4象限に区画したとき、光電センサの反射板を、各象限内に1個ずつ分散して配置したので、照射装置が回転してどの角度にあっても、最低限隣り合う2個の反射板は遮蔽されることなく有効に働くので、確実に静止リングの回転の有無と回転方向を共に検知できる。
【0035】
更にまた、反射板は、静止リングが回転しても反射を継続して光電センサに回転を検知させない領域(不感帯)を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯を設け、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯を設けたので、反射型光電センサと反射板の簡単な構成で、静止リングの回転方向の検知を行うことができる。
【0036】
実施の形態2.
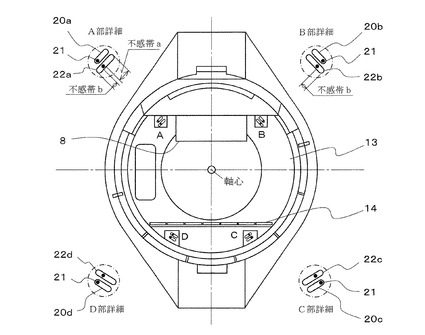
図5は、実施の形態2による回転照射型粒子線医療装置の、固定部側から回転ガントリの内部を観察して、静止リングの反射板を見た図であり、実施の形態1の図3に相当する部分である。回転照射型粒子線医療装置の回転ガントリ全体の構成、及び静止リングの詳細については、実施の形態1の図1,図2と同等なので図示及び説明は省略する。また、図3と同等部分は同位置符号で示し説明は省略する。
【0037】
図5において、A〜Dの4箇所に反射板を配置し、A,C部はCWセンサ用反射板とし、B,D部はCCWセンサ用反射板とするのは図3と同様である。
図3との相違点は、図3で示した反射板に加えて、その近傍に第2の反射板を設け、対向する固定部12側には、第2の光電センサを並設した点である。すなわち、CWセンサ用反射板20a,20cの近傍に、静止シリング13の時計方向の回転に対しても不感帯bを有する第2のCWセンサ用反射板22a,22cを配置し、また、CCWセンサ用反射板20b,20dの近傍に、静止シリング13の反時計方向の回転に対しても不感帯bを有する第2のCCWセンサ用反射板22b,22dを配置した。そして、第2のCWセンサ用反射板22a,22cの対向位置にはそれぞれ第2のCWセンサ(図示せず)を配設し、第2のCCWセンサ用反射板22b,22dの対向位置にはそれぞれ第2のCCWセンサ(図示せず)を配設している。移動床14が水平を保っている通常の状態では、各反射板の反射点21の位置は図5に示すとおりである。なお、不感帯bは不感帯a(実施の形態1の不感帯と同等)より小さくしている。
【0038】
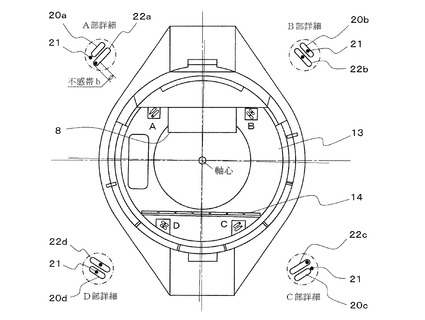
図6を参照しながら動作について説明する。なお、以下の説明では、分かりやすいように、反射板20a〜20dを第1のセンサ用反射板と称し、対応する光電センサも第1の光電センサと称することにする。
静止リング13が固定部12に対して図のように時計方向に回転したとき、回転角が小さい初期段階では、第1のCWセンサ用反射板20a,20cの反射点21は反射板面から外れるが、第2のCWセンサ用反射板22a,22cの反射点21はまだ反射面内にある。したがって、第1のCWセンサのみが作動する。更に回転が進むと、第2のCWセンサ用反射板22a,22cの反射点21が反射面から外れるので第2のCWセンサが作動する。この段階でも、第1及び第2のCCWセンサ用反射板20b,22b,20d,22dの反射点21は各反射面内にあるので、CCWセンサはいずれも作動しない。
反時計方向に回転した場合は、初期段階で第1のCCWセンサが作動し、次に第2のCCWセンサが作動するが、CWセンサはいずれも作動しない。
【0039】
上記のように、異なる不感帯の反射板をペアで配置することで、静止リング13の回転方向と回転の度合いを2段階で検出できる。このため、例えば時計方向に回転したとき、第1と第2のCWセンサの作動時間差を計測し、第2のCWセンサが速く作動したときは、駆動モータ18をより速く反時計側に駆動するように制御することで、細かな(滑らかな)制御を行うことが可能となる。
なお、各反射板の配置位置A〜Dは、好ましくは図3で説明したものと同様に、軸心を原点とする任意の直交座標系で4象限に分割した各象限内にそれぞれ分散して配置するのがよい。
【0040】
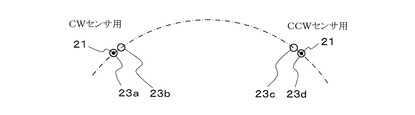
上記までの各実施の形態の説明において、反射板に不感帯を設け、反射点に対して不感帯を回転方向のいずれの側に設けるかでCWセンサ用とCCW用とを区別したが、この反射板の形状以外にも、例えば、図7のように、円形の反射板23を回転方向に2個併設し、CWセンサ用反射板23a,23bは時計方向に対して後方の反射板23aを通常時の反射点位置とし、CCWセンサ用反射板23c,23dは時計方向に対して前方の反射板23dを通常時の反射点位置とすれば、図3とほぼ同等の効果を得ることができる。
【0041】
また、移動床14は、静止リング13側から固定床10側へ開閉する構成として説明したが、背景技術の項で説明した特許文献1に示すような、一端が静止リング(図8のガイドレール支持胴35)に支持されて照射装置と共に移動するような構成でも、床面(アクセスフロア)を水平に保つためには静止リングが固定側から見て静止状態を保つことが必要不可欠なので、本発明の光電センサと反射板の構成を適用することができる。
【0042】
また、静止リング13は、固定部12側との相対的な静止状態を維持するために、静止リング13を駆動モータ18でフレーム1の回転に同期して逆回転させる構成で説明したが、上記特許文献1で説明したような、固定部側から係止ロッドを静止リングに挿入して回転を止める構成(図8参照)でも、アクセスフロアの水平を監視するために本願の光電センサと反射板の構成を適用することができる。このように、回転するフレーム内に、アクセスフロアを形成するための静止リングを有する構成であれば、その静止リングに対して適用が可能である。
【0043】
以上のように、実施の形態2の回転照射型粒子線医療装置によれば、CWセンサ用の反射板の近傍に、静止シリングの時計方向の回転に対しても不感帯を有する第2のCWセンサ用の反射板を配置すると共に対向する固定部側に第2のCWセンサを配設し、CCWセンサの反射板の近傍に、静止シリングの反時計方向の回転に対しても不感帯を有する第2のCCWセンサ用の反射板を配置すると共に対向する固定部側に第2のCCWセンサを配設したので、併設する2個の光電センサの動作時間差を観察することで、実施の形態1の効果に加えて、回転速度(ずれの程度)を知ることができるため、それに従って静止リングの駆動モータの速度を制御すれば、より細かで滑らかな制御を行うことが可能となる。
【符号の説明】
【0044】
1 フレーム 2a,2b 回転リング
3a,3b ローラ 4 ガントリ回転駆動装置
5 ブレーキ装置 6 ケーブルスプール
7 ビーム輸送機器 8 照射装置
9 建屋 10 固定床
11 治療台 12 固定部
13 静止リング 14 移動床
14a 床板 14b エアーシリンダ
15 ガイドリング 16 転動ローラ
17 ガイドローラ 18 駆動モータ
19 光電センサ 19a,19c CWセンサ
19b,19d CCWセンサ 20 反射板
20a,20c CWセンサ用反射板 20b,20d CCWセンサ用反射板
21 反射点
22a,22c 第2のCWセンサ用反射板
22b,22d 第2のCCWセンサ用反射板
23a〜23d 反射板。
【技術分野】
【0001】
この発明は、がん治療等で使用される粒子線医療装置、特に、患者周りに回転自在に照射可能な回転照射型粒子線医療装置に関するものである。
【背景技術】
【0002】
近年、がん治療を目的とした放射線医療装置では陽子や重イオンを用いたがん治療装置の開発や建設が進められている。周知のとおり、陽子や重イオン等を用いた粒子線治療はX線、ガンマ線等の従来の放射線治療に比べて、がん患部に集中的に照射することができ、正常細胞に影響を与えずに治療することが可能である。
粒子線医療装置には、患者に対して任意の方向から照射するために回転照射装置(回転ガントリ)が設けられる場合が多い。回転ガントリは粒子線照射部を360度回転させ、患者に対して任意の回転角度から荷電粒子ビームを照射できるように構成されている。
【0003】
上記のように、粒子線照射部を360度回転させ、患者に対して任意の回転角度から照射可能とした場合、患者が固定される治療台は、回転する照射部に対して固定させておく必要があるため、建屋側に設けた固定部側から張り出した構成になる。したがって、治療を行う医者もしくは放射線技師などが、常に患者に近づいて作業ができるようにアクセスフロアが設けられるが、このアクセスフロアは回転ガントリの回転角度に係わらず常に水平を保っておく必要がある。
【0004】
例えば、図8は特許文献1に示された従来の回転照射装置を示す構成図である。(a)は主要部の側面断面図であり、(b)は(a)の移動床部の正面断面図である。回転照射装置は、一端側が建屋の壁30に支持され、内部に治療用ベッド31を備えた固定胴32と、粒子線照射部33を支持する回転胴34と、この回転胴34の内側にあって、回転胴34の回転にかかわらず固定胴32から見て静止状態を保つガイドレール支持胴35と、固定胴32とガイドレール支持胴35との間に配設され、その上部を貫通する粒子線照射部33の回転に合わせて移動する屈曲自在な無端状の移動床36とで構成されている。
【0005】
移動床36を更に詳しく説明する。固定胴32の端部には、下側が水平で上側に円弧部を有し、ガイドレール支持胴35側に開口部を有するコの字状断面をした固定胴側ガイドレール32aが設けられている。一方、その対向面であるガイドレール支持胴35側にも同様な形状の回転胴側ガイドレール35aが設けられている。移動床36の両側に設けたガイドローラ36a(図(b)参照)をガイドレール32a,35aに係合させているので、移動床36は、粒子線照射部33の回転と同期して両ガイドレール32a,35aに沿って移動するが、下側は常に水平なアクセスフロアが形成されている。
【0006】
ガイドレール支持胴35は、その外周に、回転胴34の内周面を転動する複数の支持ローラ35bが設けられており、回転胴34に対して相対的に回転可能になっている。しかし、回転胴34が回転しても、固定胴32側から見てガイドレール支持胴35が静止状態を保つように、電動シリンダ37を固定胴32の上部に配設し、係止ロッド37aを作動させ、ガイドレール支持胴35側に設けた係合穴35cに挿入して係止するロック機構を備えている。これにより、回転胴34と共に粒子線照射部33が回転し、その回転に同期して移動床36が移動しても、移動床36の下側を水平に維持し続けることができるようになっている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−129103号公報(第3頁、図1−3)
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に示すような粒子線治療用回転照射室では、治療ベッド31を囲うように移動床36が回転するため、移動床36についた埃やゴミなどが治療ベッド上に落ちてくるという問題があった。また、このように移動床を回転させるのは大掛かりであり、音がうるさいという問題もあった。この問題に対しては、ガイドレール支持胴35側から、必要に応じて水平な移動床を固定胴32側へ出し入れするようにしてアクセスフロアを実現するものが提案されている。
しかし、いずれの従来技術においても、回転照射を実現する機構である回転ガントリは、照射部を搭載して共に回転する略円筒形の回転胴と、この回転胴の内部の中間位置に内接するように配設された支持胴からなっている。照射位置が回転胴の内部にあるため、治療ベッドは建屋側の固定床側からオーバーハングするように回転胴の中に突き出す必要かある。固定胴と支持胴との間に設けられる移動床は、固定胴の床面とつながり水平に保たれてアクセスフロアとしての意味をなすため、移動床を支持する支持胴は固定胴から見て静止している必要かある。
【0009】
支持胴を見かけ上静止させるためには大きくわけて2つの方法かある。1つは上記特許文献1に示すように、棒状の係止ロッドを支持胴の係合穴に係合させて回転を阻止する方法であり、もう1つは支持胴を回転胴と同期して逆方向に同じ角度だけ積極的に回す方法である。後者の場合は、係止ロッドを用いた構成に比べて高速かつスムースに照射部の回転を実現できる利点があるが、支持胴を駆動させるにあたり、もしもローラとレールとの間ですべりが生じると、所望の回転角度が得られず、結果として支持胴から出し入れされる移動床が水平を保てない虞があるという問題点があった。
【0010】
この発明は、上記のような問題点を解消するためになされたもので、何らかの原因で支持胴(本願の静止リング)が固定部に対して回転したとき、その回転を確実に検知し、移動床を水平に保つように制御できる回転照射型粒子線医療装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係わる回転照射型粒子線医療装置は、建屋側に固定された固定床及び固定床に設置された治療台を有する固定部と、粒子線を照射する照射装置が搭載され、治療台上の患者に対して粒子線を照射するように、照射装置と共に治療台の周りに回転するフレームと、フレームの内側に回転自在に支持されてフレームの回転に同期して逆回転し、固定部に対して相対的に静止状態が保たれる静止リングと、静止リングに支持され、照射装置の回転を妨げないように開閉又は移動する移動床とを備えた回転照射型粒子線医療装置であって、固定部側から回転軸の軸方向に静止リングを見て、静止リングが時計方向に回転するのを検知する反射型の光電センサ(CWセンサ)と、反時計方向に回転するのを検知する反射型の光電センサ(CCWセンサ)とが、各1個以上固定部側に配設され、光電センサに対向する静止リングの面に反射板が設けられ、反射板は、回転方向に対して一定の長さを有する反射板であり、光電センサからの光の反射点を長さ方向の中心から偏らせて静止リングに配置されており、静止リングが固定部に対して相対的に回転しても反射を継続して光電センサに回転を検知させない領域である不感帯を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯が設けられ、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯が設けられているものである。
【発明の効果】
【0012】
この発明の回転照射型粒子線医療装置によれば、回転方向に対して一定の長さを有する反射板が、光電センサからの光の反射点を長さ方向の中心から偏らせて静止リングに配置されており、静止リングが固定部に対して相対的に回転しても反射を継続して光電センサに回転を検知させない領域である不感帯を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯が設けられ、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯が設けられているので、移動床を水平に保つための静止リングが、何らかの原因で固定床に対して回転したとき、その回転を検知できると共に回転方向も容易に検知することができるので、回転方向と逆方向に静止リングの回転を制御することで、常に移動床を水平に維持することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施の形態1による回転照射型粒子線医療装置の回転ガントリ部を示す図で、(a)は回転軸に沿う方向に見た側面断面図、(b)は(a)のb−b方向から回転ガントリを観察した正面図である。
【図2】図1の静止リング部の斜視図である。
【図3】図1の静止リングに設けた反射板の詳細を示す図である。
【図4】図3の反射板の動作を説明する図である。
【図5】この発明の実施の形態2による回転照射型粒子線医療装置の、静止リングに設けた反射板の詳細を示す図である。
【図6】図5の反射板の動作を説明する図である。
【図7】反射板の別の例を示す図である。
【図8】従来の粒子線治療用回転照射室を示す図で、(a)は主要部の側面断面図、(b)は(a)の移動床部の正面断面図である。
【発明を実施するための形態】
【0014】
実施の形態1.
以下、この発明の実施の形態1の回転照射型粒子線医療装置を図に基づいて説明する。図1(a)は回転照射型粒子線医療装置の回転ガントリ全体を、回転ガントリの回転軸に沿う方向に見た側面断面図、図1(b)は回転軸に垂直な方向(b−b)から回転ガントリを観察した正面図である。また、図2は静止リング部の斜視図である。
【0015】
先ず、図1及び図2によって全体の構成を説明する。回転ガントリは、円筒状のフレーム1と、その両端部に固着された回転リング2a,2bと、一方の回転リング2aを受けるローラ3aと、そのローラ3aを回転駆動するモータや減速機が設けられたガントリ回転駆動装置4と、他方の回転リング2bを受けるローラ3bとブレーキや減速機が設けられたブレーキ装置5と、360度回転する回転ガントリ内へ配線及び配管を供給するケーブルスプール6と、回転ガントリに導入された荷電粒子ビームを輸送するビーム輸送機器7と、輸送された荷電粒子ビームを患者の照射患部にあわせて整形して照射する照射装置8とを備えている。
【0016】
一方、回転ガントリに対して、建屋9側には、固定床10が建屋9に支持固定されており、その上には患者を乗せる治療台11がフレーム1内へ出し入れ可能に設置されている。固定床10、治療台11、及びそれらを覆うように設けられた固定胴(図示せず)等で固定部12を構成している。
【0017】
フレーム1内には、フレーム1に対して回転自在に支持され、フレーム1の回転に同期して同じ角度だけ逆回転する静止リング13が設けられている。静止リング13はフレーム1に対して相対的に回転するが、固定部12から見るとフレーム1が回転しても常に静止しているように見えるため静止リングと称している。すなわち、固定部12に対して相対的に静止状態が保たれている。
静止リング13には、固定床10とほぼ同じ高さで、照射装置8の回転を妨げないように、照射装置8が通過するときに開閉する開閉式の移動床14が設けられている。
【0018】
静止リング13と移動床14の構成を図2に基づいて更に詳しく説明する。静止リング13は、フレーム1の内面に固着されたガイドリング15の内側に配置されている。静止リング13には転動ローラ16とガイドローラ17が設けられており、ガイドローラ17にガイドされて転動ローラ16がガイドリング15の内周を転動することによりフレーム1内で回転自在になっている。駆動は、静止リング13に設けられた駆動モータ18により行われ、フレーム1の回転と同期させて逆方向に同じ角度だけ静止リング13を回転させることで、固定部12側から見れば、静止リング13は常に静止状態が保たれる。
静止リング13の床面側に設けられた開閉式の移動床14は、複数の床板14aに細分化されており、細分化された床板14aのそれぞれに設けられたエアーシリンダ14bの駆動により、固定床10側へスライド可能に構成されている。
【0019】
静止リング13は、上記のように固定床10と連続した移動床14を形成し、治療台11に対して十分なアクセスフロアを得るためのものである。したがって、水平な固定床10に対して、同じく水平度を保った移動床14とする必要がある。つまり、固定部12側から見て、静止リング13が相対的に回転しないように制御する必要があるので、静止リング13の水平度を監視するために、複数の反射型の光電センサ19(以下の説明では、個別の光電センサを指すときは符号に添字を付ける。反射板も同様)が固定部12側に配設され、光電センサ19と対向する静止リング13の面には、光電センサ19からのレーザビームを反射させる反射板20が設けられている。各光電センサと反射板の配置の詳細については後述する。なお、光電センサ19の光軸は、実際には静止リング13の回転軸と平行であるが、図2では分かりやすいようにずらして示している。
【0020】
図3は、静止リング13に設ける反射板20の詳細を示す図であり、固定部12側から回転ガントリの内部の静止リング13側を見たものである。静止リング13の上部側にA,B、下部側にC,Dと合計4箇所に反射板20を配置している。当然、この反射板に対向する固定部12側に光電センサ19が配設されている。
光電センサ19は、固定部12側から回転軸の軸方向に静止リング13を見て、静止リング13が時計方向に回転するのを検知する反射型の光電センサ(以下、CWセンサと称す)と、反時計方向に回転するのを検知する反射型の光電センサ(以下、CCWセンサと称す)とで構成し、CWセンサとCCWセンサとを交互に配置している。すなわち、隣り合う光電センサは必ず一方がCWセンサ、他方がCCWセンサとなるように交互に配置する。図3では、A部とC部がCWセンサ用反射板20a,20cであり、これに対向する固定部12側にCWセンサ19a,19cが配置されている。また、B部とD部がCCWセンサ用反射板20b,20dであり、これに対向する固定部12側にCCWセンサ19b,19dが配置されている。
【0021】
4個の反射板20a〜20dは、できるだけ静止リング13の周縁部に分散して配置するのが望ましい。
好ましい例を挙げれば、反射板20が配置される静止リング13の面を、静止リング13の軸心を原点とする任意の直交座標系で4象限に区画したとき、反射板20は、各象限内に1個ずつ分散して配置するのがよい。図3で説明すれば、軸心に対して水平方向と垂直方向の直交座標系(水平,垂直に限定するものではなく任意でよい)を仮想したとき、I〜IVの各象限内に、B,A,D,Cと分散させて、且つ、CCWセンサ用反射板20b,20dとCW用反射板20a,20cを交互に配置している。
【0022】
A部を例に、反射板20を更に詳しく説明する。A部詳細図に示すように、長円で示す部分が反射板20aの反射面であり、黒丸で示す部分は光電センサ19aからの投光を反射する反射点21である。
光電センサ19は、投光部と受光部とを有する反射型の光電センサであり、反射点21からの反射光を受光し、受光の有無でON,OFF動作するものである。例えば、遮光時OFFタイプであれば、反射板が移動して反射光を受光できなくなればOFFとなる。
反射板20には、静止リングが回転しても反射を継続して、光電センサをON又はOFFに切り替わる動作をさせない領域が設けられている。この領域を不感帯と称することにする。すなわち、静止リング13が固定部12に対して回転しても不感帯内に反射点21があるときは、光電センサ20の信号が変化せず静止リング13の回転を検知しないようになっている。
【0023】
A部とC部にあるCWセンサ用反射板20a,20cは、静止シリング13の反時計方向の回転に対して不感帯が設けられ、時計方向の回転に対しては反射点21が直ちに反射板から外れるようになっている。逆に、B部とD部にあるCCWセンサ用反射板20b,20dは、静止リング13の時計方向の回転に対して不感帯が設けられている。
実際には、回転方向に対して一定の長さを有する反射板を用いて、反射点を反射板の中心ではなく図のように偏らせて静止リング13に配置すればよい。
なお、反射板20の形状は長円形として図示したが、これに限定するものではなく、静止リング13の回転に対して上記のような方向に不感帯を有するものであればどんな形状でも良い。
【0024】
次に動作について説明する。先ず始めに、図1及び図2により回転ガントリの回転動作から説明する。
回転ガントリに導入された荷電粒子ビームは、偏向電磁石や四極電磁石などよりなるビーム輸送機器7によって照射装置8まで輸送され、照射装置8で患者の照射患部の形状にあわせて整形された後に照射される。
患者は治療台11の上に固定されて位置決めが行われており、所定の照射患部に荷電粒子ビームが照射される。治療台11は、患者の照射患部が照射位置であるアイソセンタに一致するように動作させる必要があるため、通常は上下左右、前後、回転など多軸の位置決め動作が可能となっている。
【0025】
回転ガントリは、ガントリ回転駆動装置4を駆動し、ローラ3aを介して回転リング2aを回転させ、フレーム1と共にビーム輸送機器7及び照射装置8を回転させることで、患者に対して360度自在な方向からビームを照射することを可能とするもので、患者が仰向けの状態のまま様々な方向からビームを照射することができる。
このとき、治療を行う医者もしくは放射線技師などが、常に患者に近づいて作業ができるように、回転ガントリの回転角度に係わらず、常に水平を保ったアクセスフロアが必要となる。そこで、フレーム1内に配置した静止リング13の下部側に開閉可能に設けられた移動床14を、先に説明したように固定床10側に向けてスライドさせ、固定床10とほぼ同じ高さのアクセスフロアを形成する。静止リング13は、フレーム1の回転にかかわらず、固定部12側から見て常に静止状態を保つように制御することで、アクセスフロアが水平に保たれている。
【0026】
照射装置8が回転して患者より下部に来たときは、移動床14がそのままでは回転の妨げになるので、干渉を避けるため、照射装置8部の通過に合わせて移動床14を図1(a)に点線で示すように反固定床側にスライドさせる。このように、移動床14を開閉可能にし、閉状態で移動床14は治療台のアクセスフロアを形成することができるようになっている。
【0027】
次に、本願発明の特徴部分である光電センサ19の動作について説明する。
静止リング13を駆動する駆動モータ18にサーボモータ等を用いることにより、フィードバック制御することで、静止リング13の移動床14を固定部12側から見て水平に保つように制御できるが、フィードバック制御の僅かなタイムラグや転動ローラ16とガイドリング15との間ですべりが生じた場合等には、所望の回転角度が得られずに、結果として、固定部12側から見て静止リング13が所定の位置からどちらかの方向へ僅かに回転した状態(以下、この相対的な回転(ずれ)を単に回転と称す)となり水平な床面が得られなくなる。そこで、光電センサ20によってこの回転を検知して逆方向に制御することで、移動床14を常に水平に保つことが可能となる。
【0028】
図4は、静止リング13に設けた反射板20の動作を説明する図である。図は、回転ガントリを図1(b)と同方向に見たとき、静止リング13が時計回り方向に回転した状態を示している。移動床14が水平を保っている図3の状態では、4個の光電センサ19の投光による反射点21はA〜D部全ての反射板20a〜20dの内部にあるので、各光電センサ19は(遮光時OFFタイプとして)反射光を受光して全てONとなっている。
図4のように時計方向に静止リング13が回転すれば、B部及びD部のCCWセンサ用反射板20b,20dcは、反射点21が不感帯部に移動するが反射板内に有るので、CCWセンサ19b,19dは作動しない。一方、A部及びC部のCWセンサ用反射板部20a,20cでは、反射点21が反射面から外れるので受光できなくなり、CWセンサ19a,19cはOFFとなる。このように、CWセンサがOFFとなり、且つCCWセンサがONであれば、静止リング13が時計方向に回転したことが分かる。
もし、反時計方向に回転すれば、CWセンサ19a,19cはONのままであるが、B部及びD部のCCWセンサ用反射板20b,20cが反射点21を外すので、CCWセンサ19b,19dがOFFとなり、静止リング13が反時計方向に回転したことを検知できる。
【0029】
上記のように、静止リングの回転(ずれ)の有無を検知すると共に、どちらの方向に回転したかを容易に検知することができるので、回転方向と逆方向に静止リング13の回転を制御することで、常に移動床14を水平に維持することができる。制御は、例えば、時計方向の回転を検知すれば、駆動モータ18の反時計方向への速度を増せばよい。
【0030】
次に、光電センサ19及び反射板20の設置個数について説明する。
CWセンサとその反射板、及びCCWセンサとその反射板が各1個以上有れば、上述したように、静止リング13の回転の有無と回転方向を検知できる。しかしながら、CWセンサとCCWセンサが各1個の場合は、照射装置8が回転したときいずれかの反射板が照射装置に遮られる場合が起こる。反射板が1個しか有効でない場合は、例え不感帯を設けても回転方向までは検知できない。更に、照射装置8の構造上、最悪の条件では隣り合う2個が照射装置に隠れる場合が生じる。静止リング13の回転の有無と回転方向を共に検知するためには、照射装置8が回転してどの位置にあっても、CWセンサ用反射板とCCWセンサ用反射板が必ず各1個は見えている必要がある。
【0031】
そこで、反射板を図3のように静止リングの周縁部に分散して4個配置し、且つ、CWセンサ用と、CCWセンサ用とを交互に配置すれば、隣り合う2個が照射装置で遮蔽されても、CWセンサ用と、CCWセンサ用の反射板が各1個は見えていることになり、静止リングの回転の有無と回転方向を共に検知できる。
更に、4個を配置するにあたり、先に説明したように、軸心を原点とする任意の直交座標系で4象限に区画した各象限内に1個ずつ分散して配置した場合は、照射装置8部が回転してどの角度にあっても、最低限隣り合う2個の反射板20は遮蔽されることなく、CWセンサとCCWセンサが確実に有効に作動する。
【0032】
以上のように、実施の形態1の回転照射型粒子線医療装置によれば、フレームの内側に回転自在に支持されて、移動床を支持する静止リングの回転を検知するために、固定部側から回転軸の軸方向に静止リングを見て、静止リングが時計方向に回転するのを検知する反射型の光電センサ(CWセンサ)と、反時計方向に回転するのを検知する反射型の光電センサ(CCWセンサ)とを、各1個以上固定部側に配設し、光電センサに対向する静止リングの面に反射板を設けたので、移動床を水平に保つための静止リングが、何らかの原因で固定床に対して回転してずれたとき、静止リングの回転(ずれ)を検知できると共に、回転方向を容易に検知することができるので、回転方向と逆方向に静止リングの回転を制御することで、常に移動床を水平に維持することができる。
【0033】
また、光電センサ及び反射板は各4個とし、反射板は、静止リングの周縁部にCWセンサ用反射板とCCWセンサ用反射板とを交互に配置したので、照射装置の回転によって隣り合う2個の反射板が遮蔽されても、CWセンサ用反射板とCCWセンサ用反射板が各1個は有効に働くので、静止リングの回転の有無と回転方向を共に検知できる。
【0034】
また、反射板が配置される静止リングの面を静止リングの軸心を原点とする任意の直交座標系で4象限に区画したとき、光電センサの反射板を、各象限内に1個ずつ分散して配置したので、照射装置が回転してどの角度にあっても、最低限隣り合う2個の反射板は遮蔽されることなく有効に働くので、確実に静止リングの回転の有無と回転方向を共に検知できる。
【0035】
更にまた、反射板は、静止リングが回転しても反射を継続して光電センサに回転を検知させない領域(不感帯)を有し、CWセンサ用の反射板は静止シリングの反時計方向の回転に対して不感帯を設け、CCWセンサ用の反射板は静止リングの時計方向の回転に対して不感帯を設けたので、反射型光電センサと反射板の簡単な構成で、静止リングの回転方向の検知を行うことができる。
【0036】
実施の形態2.
図5は、実施の形態2による回転照射型粒子線医療装置の、固定部側から回転ガントリの内部を観察して、静止リングの反射板を見た図であり、実施の形態1の図3に相当する部分である。回転照射型粒子線医療装置の回転ガントリ全体の構成、及び静止リングの詳細については、実施の形態1の図1,図2と同等なので図示及び説明は省略する。また、図3と同等部分は同位置符号で示し説明は省略する。
【0037】
図5において、A〜Dの4箇所に反射板を配置し、A,C部はCWセンサ用反射板とし、B,D部はCCWセンサ用反射板とするのは図3と同様である。
図3との相違点は、図3で示した反射板に加えて、その近傍に第2の反射板を設け、対向する固定部12側には、第2の光電センサを並設した点である。すなわち、CWセンサ用反射板20a,20cの近傍に、静止シリング13の時計方向の回転に対しても不感帯bを有する第2のCWセンサ用反射板22a,22cを配置し、また、CCWセンサ用反射板20b,20dの近傍に、静止シリング13の反時計方向の回転に対しても不感帯bを有する第2のCCWセンサ用反射板22b,22dを配置した。そして、第2のCWセンサ用反射板22a,22cの対向位置にはそれぞれ第2のCWセンサ(図示せず)を配設し、第2のCCWセンサ用反射板22b,22dの対向位置にはそれぞれ第2のCCWセンサ(図示せず)を配設している。移動床14が水平を保っている通常の状態では、各反射板の反射点21の位置は図5に示すとおりである。なお、不感帯bは不感帯a(実施の形態1の不感帯と同等)より小さくしている。
【0038】
図6を参照しながら動作について説明する。なお、以下の説明では、分かりやすいように、反射板20a〜20dを第1のセンサ用反射板と称し、対応する光電センサも第1の光電センサと称することにする。
静止リング13が固定部12に対して図のように時計方向に回転したとき、回転角が小さい初期段階では、第1のCWセンサ用反射板20a,20cの反射点21は反射板面から外れるが、第2のCWセンサ用反射板22a,22cの反射点21はまだ反射面内にある。したがって、第1のCWセンサのみが作動する。更に回転が進むと、第2のCWセンサ用反射板22a,22cの反射点21が反射面から外れるので第2のCWセンサが作動する。この段階でも、第1及び第2のCCWセンサ用反射板20b,22b,20d,22dの反射点21は各反射面内にあるので、CCWセンサはいずれも作動しない。
反時計方向に回転した場合は、初期段階で第1のCCWセンサが作動し、次に第2のCCWセンサが作動するが、CWセンサはいずれも作動しない。
【0039】
上記のように、異なる不感帯の反射板をペアで配置することで、静止リング13の回転方向と回転の度合いを2段階で検出できる。このため、例えば時計方向に回転したとき、第1と第2のCWセンサの作動時間差を計測し、第2のCWセンサが速く作動したときは、駆動モータ18をより速く反時計側に駆動するように制御することで、細かな(滑らかな)制御を行うことが可能となる。
なお、各反射板の配置位置A〜Dは、好ましくは図3で説明したものと同様に、軸心を原点とする任意の直交座標系で4象限に分割した各象限内にそれぞれ分散して配置するのがよい。
【0040】
上記までの各実施の形態の説明において、反射板に不感帯を設け、反射点に対して不感帯を回転方向のいずれの側に設けるかでCWセンサ用とCCW用とを区別したが、この反射板の形状以外にも、例えば、図7のように、円形の反射板23を回転方向に2個併設し、CWセンサ用反射板23a,23bは時計方向に対して後方の反射板23aを通常時の反射点位置とし、CCWセンサ用反射板23c,23dは時計方向に対して前方の反射板23dを通常時の反射点位置とすれば、図3とほぼ同等の効果を得ることができる。
【0041】
また、移動床14は、静止リング13側から固定床10側へ開閉する構成として説明したが、背景技術の項で説明した特許文献1に示すような、一端が静止リング(図8のガイドレール支持胴35)に支持されて照射装置と共に移動するような構成でも、床面(アクセスフロア)を水平に保つためには静止リングが固定側から見て静止状態を保つことが必要不可欠なので、本発明の光電センサと反射板の構成を適用することができる。
【0042】
また、静止リング13は、固定部12側との相対的な静止状態を維持するために、静止リング13を駆動モータ18でフレーム1の回転に同期して逆回転させる構成で説明したが、上記特許文献1で説明したような、固定部側から係止ロッドを静止リングに挿入して回転を止める構成(図8参照)でも、アクセスフロアの水平を監視するために本願の光電センサと反射板の構成を適用することができる。このように、回転するフレーム内に、アクセスフロアを形成するための静止リングを有する構成であれば、その静止リングに対して適用が可能である。
【0043】
以上のように、実施の形態2の回転照射型粒子線医療装置によれば、CWセンサ用の反射板の近傍に、静止シリングの時計方向の回転に対しても不感帯を有する第2のCWセンサ用の反射板を配置すると共に対向する固定部側に第2のCWセンサを配設し、CCWセンサの反射板の近傍に、静止シリングの反時計方向の回転に対しても不感帯を有する第2のCCWセンサ用の反射板を配置すると共に対向する固定部側に第2のCCWセンサを配設したので、併設する2個の光電センサの動作時間差を観察することで、実施の形態1の効果に加えて、回転速度(ずれの程度)を知ることができるため、それに従って静止リングの駆動モータの速度を制御すれば、より細かで滑らかな制御を行うことが可能となる。
【符号の説明】
【0044】
1 フレーム 2a,2b 回転リング
3a,3b ローラ 4 ガントリ回転駆動装置
5 ブレーキ装置 6 ケーブルスプール
7 ビーム輸送機器 8 照射装置
9 建屋 10 固定床
11 治療台 12 固定部
13 静止リング 14 移動床
14a 床板 14b エアーシリンダ
15 ガイドリング 16 転動ローラ
17 ガイドローラ 18 駆動モータ
19 光電センサ 19a,19c CWセンサ
19b,19d CCWセンサ 20 反射板
20a,20c CWセンサ用反射板 20b,20d CCWセンサ用反射板
21 反射点
22a,22c 第2のCWセンサ用反射板
22b,22d 第2のCCWセンサ用反射板
23a〜23d 反射板。
【特許請求の範囲】
【請求項1】
建屋側に固定された固定床及び前記固定床に設置された治療台を有する固定部と、
粒子線を照射する照射装置が搭載され、前記治療台上の患者に対して前記粒子線を照射するように、前記照射装置と共に前記治療台の周りに回転するフレームと、
前記フレームの内側に回転自在に支持されて前記フレームの回転に同期して逆回転し、前記固定部に対して相対的に静止状態が保たれる静止リングと、
前記静止リングに支持され、前記照射装置の回転を妨げないように開閉又は移動する移動床とを備えた回転照射型粒子線医療装置であって、
前記固定部側から回転軸の軸方向に前記静止リングを見て、前記静止リングが時計方向に回転するのを検知する反射型の光電センサ(以下、CWセンサと称す)と、反時計方向に回転するのを検知する反射型の光電センサ(以下、CCWセンサと称す)とが、各1個以上前記固定部側に配設され、前記光電センサに対向する前記静止リングの面に反射板が設けられ、
前記反射板は、回転方向に対して一定の長さを有する反射板であり、前記光電センサからの光の反射点を長さ方向の中心から偏らせて前記静止リングに配置されており、前記静止リングが前記固定部に対して相対的に回転しても反射を継続して前記光電センサに回転を検知させない領域である不感帯を有し、前記CWセンサ用の反射板は前記静止シリングの反時計方向の回転に対して前記不感帯が設けられ、前記CCWセンサ用の反射板は前記静止リングの時計方向の回転に対して前記不感帯が設けられていることを特徴とする回転照射型粒子線医療装置。
【請求項1】
建屋側に固定された固定床及び前記固定床に設置された治療台を有する固定部と、
粒子線を照射する照射装置が搭載され、前記治療台上の患者に対して前記粒子線を照射するように、前記照射装置と共に前記治療台の周りに回転するフレームと、
前記フレームの内側に回転自在に支持されて前記フレームの回転に同期して逆回転し、前記固定部に対して相対的に静止状態が保たれる静止リングと、
前記静止リングに支持され、前記照射装置の回転を妨げないように開閉又は移動する移動床とを備えた回転照射型粒子線医療装置であって、
前記固定部側から回転軸の軸方向に前記静止リングを見て、前記静止リングが時計方向に回転するのを検知する反射型の光電センサ(以下、CWセンサと称す)と、反時計方向に回転するのを検知する反射型の光電センサ(以下、CCWセンサと称す)とが、各1個以上前記固定部側に配設され、前記光電センサに対向する前記静止リングの面に反射板が設けられ、
前記反射板は、回転方向に対して一定の長さを有する反射板であり、前記光電センサからの光の反射点を長さ方向の中心から偏らせて前記静止リングに配置されており、前記静止リングが前記固定部に対して相対的に回転しても反射を継続して前記光電センサに回転を検知させない領域である不感帯を有し、前記CWセンサ用の反射板は前記静止シリングの反時計方向の回転に対して前記不感帯が設けられ、前記CCWセンサ用の反射板は前記静止リングの時計方向の回転に対して前記不感帯が設けられていることを特徴とする回転照射型粒子線医療装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−40433(P2012−40433A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2011−261295(P2011−261295)
【出願日】平成23年11月30日(2011.11.30)
【分割の表示】特願2008−248161(P2008−248161)の分割
【原出願日】平成20年9月26日(2008.9.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【分割の表示】特願2008−248161(P2008−248161)の分割
【原出願日】平成20年9月26日(2008.9.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]