
回転状態検出機構
【課題】回転体が正常に回転しているか否かを判定する時間が短縮された回転状態検出機構を提供する。
【解決手段】外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構に関する。回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっており、処理部は、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するパターン判定部を有する。
【解決手段】外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構に関する。回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっており、処理部は、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するパターン判定部を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に示されるように、被検出歯が等間隔毎に形成されたクランクロータ(回転体)、及び、そのクランクロータの近傍に配置され、被検出歯が通過する毎に通過検出信号(パルス信号)を出力する半導体磁気センサを備える内燃機関のクランク角検出装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−32620号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記した内燃機関のクランク角検出装置では、クランクロータを支持する回転軸が、クランクロータの回転方向に遊びを有するために、外部からの振動などによって、クランクロータが回転方向に振動する虞がある。例えば、クランクロータが、半導体磁気センサに対して、1つの被検出歯と、その被検出歯と隣接する被検出歯との間で振動する場合、パルスが半導体磁気センサから等間隔毎に出力されることとなる。これに対して、クランクロータが正常に回転している場合、被検出歯は等間隔毎に形成されているので、上記した振動時と同様にして、パルスが半導体磁気センサから等間隔毎に出力されることとなる。このように、クランクロータが振動している、クランクロータが正常に回転している、いずれの場合においても、パルスが半導体磁気センサから等間隔毎に出力されるため、クランクロータが正常に回転しているのか否かを判定することが困難であった。
【0005】
なお、特許文献1には、クランクロータの一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成例が示されている。このような構成では、クランクロータが1回転した場合、半導体磁気センサからは、その欠落部に対応したパルスが出力されるので、半導体磁気センサから出力される信号に、上記した欠落部に対応したパルスが出力されたか否かを判定することで、クランクロータが正常に回転しているか否かを判定することは可能である。しかしながら、この場合、欠落部に対応したパルスを確実に検出するには、半導体磁気センサに対する欠落部の位置が定まらないので、クランクロータが最長で1回転しなければならない。そのため、クランクロータが正常に回転しているか否かを判定する時間が長くなる、という問題が生じる。
【0006】
そこで、本発明は上記問題点に鑑み、回転体が正常に回転しているか否かを判定する時間が短縮された回転状態検出機構を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記した目的を達成するために、請求項1に記載の発明は、外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構であって、複数の歯部はそれぞれ同一形状であり、回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっており、処理部は、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定することで、回転体が正常に回転しているか否かを判定するパターン判定部を有することを特徴とする。
【0008】
以下においては、回転体が一方向に回転しているとする。そして、その回転状態において、センサ部は、歯部がセンサ部を通過する度にパルスを出力し、2つの歯部の間がセンサ部を通過する場合にパルスを出力しないものとする。換言すれば、センサ部は、歯部がセンサ部を通過する度に、電圧レベルがHiレベルの信号を出力し、2つの歯部の間がセンサ部を通過する度に、電圧レベルがLoレベルの信号を出力するものとする。
【0009】
請求項1に記載の発明では、回転体の外周に、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成されている。そして、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっている。
【0010】
したがって、センサ部は、回転体が第1歯対から第2歯対までを完全に回転するまでに、以下に示す信号を順次出力する。すなわち、センサ部は、第1歯対を成す一方の歯部に対応するHiレベルの信号と、第1の間隔に対応するLoレベルの信号と、第1歯対を成す他方の歯部に対応するHiレベルの信号と、第3の間隔に対応するLoレベルの信号と、第2歯対を成す一方の歯部に対応するHiレベルの信号と、第2の間隔に対応するLoレベルの信号と、第2歯部を成す他方の歯部に対応するHiレベルの信号と、を順次出力する。
【0011】
請求項1に記載の発明では、歯部それぞれが同一形状となっており、上記したHiレベルの信号は、歯部の形状に依存するので、その出力時間(パルス幅)は同一となる。これに対して、上記したLoレベルの信号は、隣接する歯部の間隔に依存するので、第1の間隔に対応するLoレベルの信号の出力時間と、第2の間隔に対応するLoレベルの信号の出力時間それぞれは、第3の間隔に対応するLoレベルの信号の出力時間とは異なる。このように、回転体が正常に回転している場合、センサ部からは、一定のパルス幅を有するパルスが、歯部の間隔に依存した時間毎に出力される。すなわち、歯部の形成パターンに対応した信号が、センサ部から出力される。
【0012】
これに対して、例えば、回転体がセンサ部に対して1つの歯部とその歯部と隣接する歯部との間で振動する場合、センサ部からは、パルスが等間隔毎に出力される。このように、回転体が振動している場合、回転体が正常に回転している場合とは異なり、歯部の形成パターンに対応した信号が、センサ部から出力されない。
【0013】
以上により、パターン判定部によって、パルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定することで、回転体が正常に回転しているか否かを判定することができる。
【0014】
ところで、回転体の一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成の場合、回転体が正常に回転しているか否かを確実に判定するには、センサ部に対する欠落部の位置が定まらないので、最長で、回転体が1回転しなければならない。これに対して、本発明では、複数の第1歯対と第2歯対とが、回転体の外周に交互に形成された構成となっている。したがって、本発明の場合、回転体が1回転する前に、回転体が正常に回転しているか否かを確実に判定することができる。以上により、請求項1に記載の回転状態検出機構は、回転体の一部に欠落部が設けられた構成と比べて、回転体が正常に回転しているか否かを判定する時間が短縮された構成となっている。
【0015】
請求項2に記載のように、センサ部は、回転体が一方向に回転している状態で、センサ部に対して歯部が通過する毎にパルスを出力する。そして、パターン判定部は、回転体が一方向に回転している状態で、センサ部の出力信号における、任意のパルスである、第1パルスの立ち下がり時から、第1パルスの次に出力される第2パルスの立ち上がり時までの第1時間と、第2パルスの立ち下がり時から、第2パルスの次に出力される第3パルスの立ち上がり時までの第2時間とを比較した値、及び、第2時間と、第3パルスの立ち下がり時から、第3パルスの次に出力される第4パルスの立ち上がり時までの第3時間とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する構成が好適である。
【0016】
以下、第1歯対を成す一方の歯部がセンサ部を通過した際に出力されるパルスを第1パルスとし、第1歯対を成す他方の歯部がセンサ部を通過した際に出力されるパルスを第2パルスとする。そして、第2歯対を成す一方の歯部がセンサ部を通過した際に出力されるパルスを第3パルスとし、第2歯対を成す他方の歯部がセンサ部を通過した際に出力されるパルスを第4パルスとする。
【0017】
請求項1に記載したように、第1の間隔及び第2の間隔と第3の間隔とは異なる。したがって、第1パルスの立ち下がり時から、第2パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第1時間)、及び、第3パルスの立ち下がり時から、第4パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第3時間)と、第2パルスの立ち下がり時から、第3パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第2時間)とは異なる。したがって、第1時間と第2時間とを比較した値、及び、第2時間と第3時間とを比較した値の少なくとも1つを算出し、その値が、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0018】
なお、請求項2では、回転体が他方向に回転している状態で、センサ部に対して2つの歯部の間を通過する毎にパルスが出力される構成となっている。したがって、回転体が他方向に回転している状態では、上記した第1時間が第1パルスのパルス幅(第1パルス幅)に対応し、第2時間が第2パルスのパルス幅(第2パルス幅)に対応し、第3時間が第3パルスのパルス幅(第3パルス幅)に対応する。これにより、回転体が他方向に回転している状態では、請求項2に記載のように、第1パルス幅(第1時間)と第2パルス幅(第2時間)とを比較した値、及び、第2パルス幅(第2時間)と第3パルス幅(第3時間)とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する。すなわち、第1時間と第2時間とを比較した値、及び、第2時間と第3時間とを比較した値の少なくとも1つを算出し、その値が、算出されることが期待される期待値であるか否かを判定する。すなわち、パルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0019】
以上、示したように、請求項2に記載の発明の場合、回転体が正常に回転しているか否かを判定するには、第1時間と第2時間、若しくは、第2時間と第3時間を得ることができればよい。したがって、回転体がセンサ部に対して、第1歯対を成す一方の歯部から、第1歯対を成す他方の歯部と隣接する第2歯対を成す一方の歯部まで、若しくは、第1歯対を成す他方の歯部から、第2歯部を成す他方の歯部まで回転すれば良い。すなわち、回転体が第1歯対から第2歯対までを完全に回転しなくとも、回転体が正常に回転しているか否かを判定することができる。
【0020】
なお、請求項2に記載のパターン判定部の具体的な構成としては、例えば請求項3に記載のように、回転体がセンサ部に対して、第1歯対が成す第1の間隔を回転するまでに、センサ部が出力する信号の第1出力時間と、第1歯対と第2歯対とが成す第3の間隔を回転するまでに、センサ部が出力する信号の第2出力時間との比、及び、第2歯対が成す第2の間隔を回転するまでに、センサ部が出力する信号の第3出力時間と、第2出力時間との比の少なくとも一方を出力する第1除算部と、該第1除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第1比較部と、を有する構成を採用することができる。なお、請求項3に記載の所定の範囲は、第1除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0021】
また、回転体が正常に回転しているか否かを判定するパターン判定部としては、請求項4に記載のように、パターン判定部は、センサ部の出力信号における、任意のパルスである、第1パルスのパルス周期(第1パルス周期)と、第1パルスの次に出力される第2パルスのパルス周期(第2パルス周期)とを比較した値、及び、第2パルス周期と、第2パルスの次に出力される第3パルスのパルス周期(第3パルス周期)とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する構成を採用することができる。
【0022】
以下、第1歯対を成す一方の歯部と、第1の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第1パルス周期とし、第1歯対を成す他方の歯部と、第3の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第2パルス周期とする。そして、第2歯対を成す一方の歯部と、第2の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第3パルス周期とする。
【0023】
請求項1に記載したように、第1の間隔及び第2の間隔と第3の間隔とは異なるので、第1パルス周期及び第3パルス周期と第2パルス周期とは異なる。したがって、第1パルス周期と第2パルス周期とを比較した値、及び、第2パルス周期と第3パルス周期とを比較した値の少なくとも1つを算出し、その値が、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0024】
そして、請求項4に記載のパターン判定部の具体的な構成としては、例えば請求項5に記載のように、パターン判定部は、回転体が、センサ部に対して、第1歯対を成す一方の歯部と、第1歯対が成す第1の間隔とを回転するまでに、センサ部が出力する信号の第4出力時間と、第1歯対を成す他方の歯部と、第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、センサ部が出力する信号の第5出力時間との比、及び、第2歯対を成す一方の歯部と、第2歯対が成す第2の間隔とを回転するまでにセンサ部が出力する信号の第6出力時間と、第5出力時間との比の少なくとも一方を出力する第2除算部と、該第2除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第2比較部と、を有する構成を採用することができる。なお、請求項5に記載の所定の範囲は、第2除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0025】
ところで、回転体の角速度が一定ではない場合、上記した各パルスのパルス周期やパルス幅が変動する。そのため、各パルスのパルス周期やパルス幅などを比較することで回転体が正常に回転しているか否かを算出する場合、比較した値が、回転体の角速度が一定の状態で算出されることが期待される期待値とは異なる虞がある。この場合、回転体が正常に回転しているにも関わらず、回転体が正常に回転していない、という誤った判定が下される虞がある。そこで、請求項6に記載のように、処理部が、回転体の角速度が一定か否かを判定する運動状態判定部を有し、パターン判定部は、運動状態判定部によって回転体の角速度が一定であると判定された場合に、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するのが好ましい。これによれば、回転体が正常に回転しているにも関わらず、回転体の角速度が一定ではないために、回転体が正常に回転していない、という誤った判定が下されることが抑制される。
【0026】
運動状態判定部の具体的な構成としては、例えば請求項7に記載のように、運動状態判定部は、回転体が、センサ部に対して、第1歯対が成す第1の間隔を回転するまでに、センサ部が出力する信号の第1出力時間と、第1歯対と第2歯対とが成す第3の間隔を回転するまでに、センサ部が出力する信号の第2出力時間との比、及び、第2歯対が成す第2の間隔を回転するまでに、センサ部が出力する信号の第3出力時間と、第2出力時間との比の少なくとも一方を出力する第3除算部と、該第3除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第3比較部と、を有する構成を採用することができる。
【0027】
または、請求項8に記載のように、運動状態判定部は、回転体が、センサ部に対して、第1歯対を成す一方の歯部と、第1歯対が成す第1の間隔とを回転するまでに、センサ部が出力する信号の第4出力時間と、第1歯対を成す他方の歯部と、第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、センサ部が出力する信号の第5出力時間との比、及び、第2歯対を成す一方の歯部と、第2歯対が成す第2の間隔とを回転するまでにセンサ部が出力する信号の第6出力時間と、第5出力時間との比の少なくとも一方を出力する第4除算部と、該第4除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第4比較部と、を有する構成を採用することができる。なお、請求項7に記載の所定の範囲は、第3除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。また、請求項8に記載の所定の範囲は、第4除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0028】
ところで、回転体が回転している状態で、回転状態検出機構に振動が印加された場合、上記した各パルスのパルス周期やパルス幅が変動する。そのため、各パルスのパルス周期やパルス幅などを比較することで回転体が正常に回転しているか否かを算出する場合、比較した値が、回転体に振動が印加されていない状態で算出されることが期待される期待値とは異なる虞がある。この場合、回転体が正常に回転しているにも関わらず、回転体が正常に回転していない、という誤った判定が下される虞がある。そこで、請求項9に記載のように、処理部が、センサ部から出力されるパルス信号の波形が正常か否かを判定する波形判定部を有し、パターン判定部は、波形判定部によってパルス信号の波形が正常であると判定された場合に、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するのが好ましい。これによれば、回転体が正常に回転しているにも関わらず、回転体に印加された振動によって、回転体が正常に回転していない、という誤った判定が下されることが抑制される。
【0029】
波形判定部の具体的な構成としては、例えば請求項10に記載のように、波形判定部は、センサ部の出力信号における、任意のパルスのパルス幅と、そのパルスの立ち下がり時から、そのパルスの次に出力されるパルスの立ち上がり時までの時間との比を出力する第5除算部と、該第5除算部によって出力された値が所定の範囲内に収まっているか否かを判定する第5比較部と、を有する構成を採用することができる。なお、請求項10に記載の所定の範囲は、第5除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0030】
請求項11に記載のように、第1の間隔と、第2の間隔が同一の構成を採用することができる。若しくは、請求項12に記載のように、第1の間隔と、第2の間隔が異なる構成を採用することもできる。また、請求項13に記載のように、第3の間隔は、第1の間隔及び第2の間隔よりも長い構成を採用することができる。
【0031】
請求項14に記載のように、処理部は、センサ部から出力されるパルスの立ち上がり数と、立ち下がり数との少なくとも一方を数えるカウント部と、カウント部の出力信号に基づいて、回転体の回転数を算出する回転数処理部と、を有する構成を採用することができる。
【0032】
請求項15に記載のように、センサ部は、磁束を回転体に印加するように配置された磁石と、回転体の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子と、該磁電変換素子の出力信号をアナログ信号からディジタル信号に変換するA−D変換部と、を有する構成を採用することができる。
【図面の簡単な説明】
【0033】
【図1】参考例としての回転体とセンサ部の概略構成を示す正面図である。
【図2】図1に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図3】第1実施形態に係る回転体とセンサ部の概略構成を示す正面図である。
【図4】図3に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図5】回転体が第1歯対から第2歯対までを完全に回転するまでに出力されるパルス信号を説明するための波形図であり、(a)は、回転体が時計回りに回転している状態で出力されるパルス信号、(b)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図6】第1実施形態に係る処理部の概略構成を説明するためのブロック図である。
【図7】回転体の変形例を説明するための正面図である。
【図8】図7に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【発明を実施するための形態】
【0034】
以下、本発明を説明する前に、図1及び図2に基づいて、参考例としての回転状態検出機構100を説明する。
(参考例)
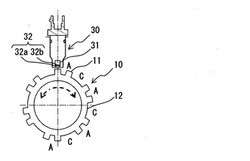
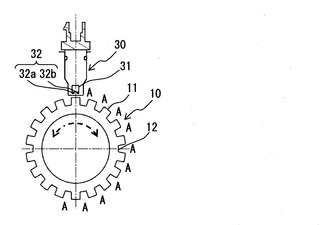
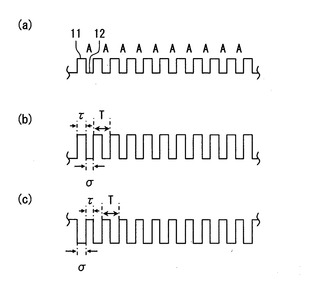
図1は、参考例としての回転体とセンサ部の概略構成を示す正面図である。図2は、図1に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【0035】
回転状態検出機構100は、要部として、外周に複数の歯部11が所定の間隔(第1の間隔A)で形成された回転体10と、該回転体10の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部30と、該センサ部30の出力信号を処理する処理部50と、を有する。本参考例では、回転体10と、センサ部30とを説明し、処理部50の説明を省略する。
【0036】
回転体10は、空気よりも透磁率が高い材料によって形成されており、図1、及び図2の(a)に示すように、回転体10の外周には、同一形状を有する複数の歯部11が第1の間隔Aで等間隔毎に形成されている。そして、歯部11における、回転体10の円周方向に沿う長さと、2つの歯部11の間に形成された凹部12における、回転体10の円周方向に沿う長さ(第1の間隔A)とが等しくなっている。なお、上記した2つの歯部11の間隔は、一方の歯部11における、他方の歯部11と回転体10の円周方向にて対向する側部から、他方の歯部11における、一方の歯部11と回転体10の円周方向にて対向する側部との間隔に相当する。
【0037】
センサ部30は、要部として、磁束を回転体10に印加するように配置された磁石31と、回転体10の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子32と、該磁電変換素子32の出力信号をアナログ信号からディジタル信号に変換するA−D変換部(図示略)と、を有する。磁電変換素子32は、回転体10の回転方向に沿って並列配置された、2つの磁電変換素子32a,32bからなる。これら2つの磁電変換素子32a,32bの隣接距離は、歯部11若しくは凹部12における、回転体10の円周方向に沿う長さ(第1の間隔A)よりも短くなっている。そして、一方の磁電変換素子32aの出力端子は、差動増幅回路(図示略)の正相入力端子に接続され、他方の磁電変換素子32bの出力端子は、差動増幅回路の逆相入力端子に接続されている。したがって、差動増幅回路からは、2つの磁電変換素子32a,32bそれぞれの出力信号の差分に応じた信号が出力される。その出力信号は、A−D変換部に入力され、その差分に応じたパルス信号がA−D変換部から出力される。
【0038】
回転体10が回転すると、回転体10の外周に形成された歯部11や凹部12も回転する。すると、歯部11や凹部12の回転に伴って、回転体10に印加される磁束の印加方向が変動する。この結果、磁電変換素子32に印加される磁束の印加方向と量が変動し、磁電変換素子32から出力される信号が変動する。
【0039】
上記したように、2つの磁電変換素子32a,32bが回転体10の回転方向に沿って配置され、その隣接距離が第1の間隔Aよりも短くなっている。したがって、例えば、一方の磁電変換素子32aと1つの歯部11とが対向している場合、他方の磁電変換素子32bは、歯部11と遠ざかり、凹部12と近くなる。磁束は、空気よりも透磁率が高い歯部11を透過しようとするので、歯部11と対向する一方の磁電変換素子32aに印加される磁束の量が、歯部11と遠く、凹部12と近い他方の磁電変換素子32bに印加される磁束の量よりも多くなる。この結果、2つの磁電変換素子32a,32bそれぞれから出力される信号の電圧レベルに差が生じ、上記した差動増幅回路から出力される信号が変動する。
【0040】
本参考例では、回転体10が時計回り(図1に破線矢印で示す方向)に回転している状態で、センサ部30に対して歯部11が通過する度に、差動増幅回路から正の電圧レベルの信号が出力され、センサ部30に対して凹部12が通過する度に、差動増幅回路から負の電圧レベルの信号が出力されるように、2つの磁電変換素子32a,32bそれぞれの出力端子が差動増幅回路の入力端子に接続されている。したがって、回転体10が時計回りに回転している状態では、図2の(b)に示すように、センサ部30に対して歯部11が通過する度に、A−D変換部(センサ部30)からHiレベルの信号が出力され、センサ部30に対して凹部12が通過する度に、A−D変換部(センサ部30)からLoレベルの信号が出力される。これとは反対に、回転体10が反時計回り(図1に一点鎖線矢印で示す方向)に回転している状態では、位相が180°ずれるので、図2の(c)に示すように、センサ部30に対して歯部11が通過する度に、A−D変換部(センサ部30)からLoレベルの信号が出力され、センサ部30に対して凹部12が通過する度に、A−D変換部(センサ部30)からHiレベルの信号が出力される。このように、2つの磁電変換素子32a,32bが差動増幅回路に接続された構成の場合、回転方向が反転すると、センサ部30から出力される信号の電圧レベルが反転する。
【0041】
上記したように、歯部11及び凹部12それぞれの回転体10の円周方向に沿う長さが等しくなっている。したがって、図2の(b)及び図2の(c)それぞれに示すパルスのデューティ比(パルス幅をパルス周期で割った値)は、0.5(50%)となっている。
【0042】
ここで、パルス幅とは、図2の(b)及び図2の(c)それぞれに記号τによって示すように、Hiレベルの信号が出力される時間を示し、パルス周期とは、図2の(b)及び図2の(c)それぞれに記号Tによって示すように、Hiレベルの信号が出力される時間と、Loレベルの信号が出力される時間(図2の(b)及び図2の(c)それぞれに記号σによって示されている時間)との和を示す。なお、Hiレベルの信号が出力される時間とは、1つのパルスの立ち上がりエッジから、そのパルスの立ち下がりエッジまでの時間を示し、Loレベルの信号が出力される時間とは、1つのパルスの立ち下がりエッジから、そのパルスの次に出力されるパルスの立ち上がりエッジまでの時間を示す。以下においては、煩雑となることを避けるために、Hiレベルの信号が出力される時間をHiパルス幅と示し、Loレベルの信号が出力される時間をLoパルス幅と示す。
【0043】
回転体10が時計回りに回転している場合、Hiパルス幅は、歯部11における回転体10の円周方向に沿う長さに依存し、Loパルス幅は、凹部12における回転体10の円周方向に沿う長さに依存する。これとは反対に、回転体10が反時計回りに回転している場合、Hiパルス幅は、凹部12における回転体10の円周方向に沿う長さに依存し、Loパルス幅は、歯部11における回転体10の円周方向に沿う長さに依存する。上記したように、本参考例では、歯部11及び凹部12それぞれの回転体10の円周方向に沿う長さは等しいので、Hiパルス幅とLoパルス幅とは相等しい。
【0044】
次に、本参考例で示した回転状態検出機構100の問題点を説明する。この回転状態検出機構100では、図2に示すように、回転体10が正常に回転している場合、パルスがセンサ部30から等間隔毎に出力される。これに対して、例えば、回転体10がセンサ部30に対して、1つの歯部11と、それと隣接する歯部11との間(凹部12)で振動する場合、回転体10が正常に回転している場合と同様にして、パルスがセンサ部30から等間隔毎に出力される。もちろん、回転体10が振動している場合と、回転体10が正常に回転している場合とでは、パルスのデューティ比は異なる。したがって、デューティ比を算出することで、回転体10が正常に回転しているのか否かを判定することも可能ではある。しかしながら、回転体10の角速度が変動した場合、各パルスのデューティ比が変動するので、各パルスのデューティ比が、算出されることが期待される値0.5(50%)とは異なる虞がある。その結果、回転体10が正常に回転しているにも関わらず、回転体10が正常に回転していない、という誤った判定が下される虞がある。また、回転体10が正常に回転している、回転体10が振動している、いずれの場合においても、パルスがセンサ部30から等間隔毎に出力されるため、パルスの出力パターンによって、回転体10が正常に回転しているのか否かを判定することは困難である。これら問題点に対して、本発明に係る回転状態検出機構100は、以下の実施形態に示す構成を採用することで、回転体10が正常に回転しているか否かを判定している。
【0045】
(第1実施形態)
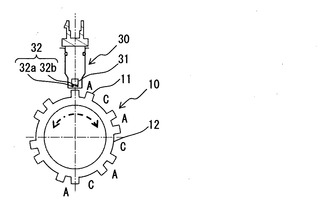
本発明の第1実施形態を、図3〜図6に基づいて説明する。図3は、第1実施形態に係る回転体とセンサ部の概略構成を示す正面図である。図4は、図3に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。図5は、回転体が第1歯対から第2歯対までを完全に回転するまでに出力されるパルス信号を説明するための波形図であり、(a)は、回転体が時計回りに回転している状態で出力されるパルス信号、(b)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。図6は、第1実施形態に係る処理部の概略構成を説明するためのブロック図である。なお、図3は、参考例として示した図1に対応しており、図4は、参考例として示した図2に対応している。
【0046】
第1実施形態に係る回転状態検出機構100は、参考例として示した回転状態検出機構100によるものと共通するところが多いので、以下、共通部分については詳しい説明は省略し、異なる部分を重点的に説明する。なお、参考例に示した要素と同一の要素には、同一の符号を付与するものとする。
【0047】
本実施形態に係る回転状態検出機構100は、歯部11の形成パターンと、参考例では説明しなかった処理部50とに特徴がある。
【0048】
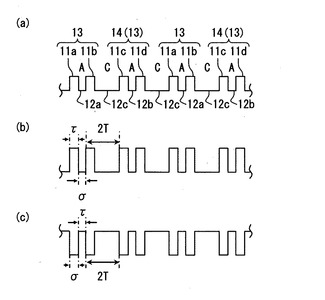
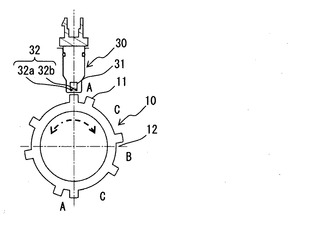
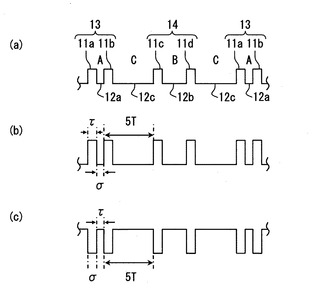
先ず、本実施形態の第1の特徴点である、歯部11の形成パターンについて説明する。回転体10の外周には、歯部11の間隔が第1の間隔Aで隣接配置された2つの歯部11a,11bから成る第1歯対13と、第2の間隔Bで隣接配置された2つの歯部11c,11dから成る第2歯対14とが交互に複数形成されている。そして、第1歯対13を成す1つの歯部11と、それと隣接する第2歯対14を成す1つの歯部11との間隔が、第1の間隔A及び第2の間隔Bとは異なる第3の間隔Cとなっている。本実施形態では、第1の間隔Aと第2の間隔Bとが同一なっており、第1歯対13と第2歯対14とは、同一の形状を有する。したがって、以下においては、煩雑となることを避けるために、第2歯対14を第1歯対13と示し、第2の間隔Bを第1の間隔Aと示す。なお、図3及び図4においても、第2の間隔Bを第1の間隔Aと示す。
【0049】
本実施形態に係る回転体10は、歯部11が第1の間隔Aで形成された回転体(参考例で示した回転体10)における、任意の1つの歯部11と回転体10の円周方向で隣接する2つの歯部11の一方を除去することで形成される。参考例と同様にして、歯部11における回転体10の円周方向に沿う長さは、第1の間隔Aと等しくなっており、第3の間隔Cは、第1の間隔Aの3倍の長さを有する。
【0050】
センサ部30は、回転体10が時計回りに回転すると、回転体10が第1歯対13から第2歯対14までを完全に回転するまでに、下記に示す信号を順次出力する。すなわち、センサ部30は、第1歯対13を成す一方の歯部11aに対応するHiレベルの第1信号と、第1歯対13が成す凹部12aに対応するLoレベルの第2信号と、第1歯対13を成す他方の歯部11bに対応するHiレベルの第3信号とを出力し、歯部11bと、それと隣接する第2歯対14を成す一方の歯部11cとが成す凹部12cに対応するLoレベルの第4信号と、歯部11cに対応するHiレベルの第5信号と、第2歯対14が成す凹部12bに対応するLoレベルの第6信号と、第2歯対14を成す他方の歯部11dに対応するHiレベルの第7信号と、を順次出力する。
【0051】
本実施形態では、上記した、第2信号、第4信号、及び第6信号それぞれの出力時間のいずれかが、特許請求の範囲に記載の第1時間〜第3時間のいずれかに相当し、第1信号、第3信号、及び第5信号それぞれの出力時間のいずれかが、特許請求の範囲に記載の第1パルス幅〜第3パルス幅のいずれかに相当する。そして、第1信号が、特許請求の範囲に記載の第1パルスに相当し、第3信号が、特許請求の範囲に記載の第2パルスに相当し、第5信号が、特許請求の範囲に記載の第3パルスに相当し、第7信号が、特許請求の範囲に記載の第4パルスに相当する。また、第2信号の出力時間が、特許請求の範囲に記載の第1出力時間に相当し、第4信号の出力時間が、特許請求の範囲に記載の第2出力時間に相当し、第6信号の出力時間が、特許請求の範囲に記載の第3出力時間に相当する。したがって、第1信号と第2信号の出力時間の和が、特許請求の範囲に記載の第4出力時間に相当し、第3信号と第4信号の出力時間の和が、特許請求の範囲に記載の第5出力時間に相当し、第2信号と第6信号の出力時間の和が、特許請求の範囲に記載の第6出力時間に相当する。
【0052】
以下、第1〜第7信号を、図4、及び図5の(a)に基づいて説明する。第1,3,5,7信号それぞれは、歯部11a〜11dに対応するので、そのHiパルス幅は、それぞれ同じ値τを有する。これに対して、第2,4,6信号は、凹部12a〜12cに対応するので、第2及び第6信号それぞれのLoパルス幅は同一の値σ1を有し、その値σ1は、第4信号のLoパルス幅σ2とは異なる。上記したように、第3の間隔Cは、第1の間隔Aの3倍の長さを有するので、第4信号のLoパルス幅σ2は、第2若しくは第6信号のLoパルス幅σ1と比べて3倍の値を有する。また、歯部11における、回転体10の円周方向に沿う長さは、第1及び第2歯対13,14の成す第1の間隔Aと等しくなっているので、第1,3,5,7信号のHiパルス幅τと、第2及び第6信号のLoパルス幅σ1とは同一となる。以下、煩雑となることを避けるために、第2及び第6信号のLoパルス幅σ1をσと示し、第4信号のLoパルス幅σ2を3σと示す。
【0053】
以上により、センサ部30は、回転体10が時計回りに第1歯対13から第2歯対14までを完全に回転するまでに、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力する。このように、回転体10が時計回りに正常に回転している場合、Hiパルス幅は一定不変なのに対して、Loパルス幅は周期的に、σ,3σ,σ,3σ,σ,3σ…と順次変動する。なお、参考例で示したように、パルス周期は、Hiパルス幅とLoパルス幅との和によって表される。したがって、上記したτとσとの和をTとすると、パルス周期は、T,2T,T,2T,T,2T…と順次変動する。
【0054】
次に、回転体10が反時計回りに回転する場合を説明する。回転体10が反時計回りに回転する場合、電圧レベルが反転したパルス信号が、センサ部30から出力される。すなわち、センサ部30は、図4の(c)に示すように、Loレベルの第1信号と、Hiレベルの第2信号と、Loレベルの第3信号と、Hiレベルの第4信号と、Loレベルの第5信号と、Hiレベルの第6信号と、Loレベルの第7信号と、を順次出力する。
【0055】
第1,3,5,7信号は、歯部11a〜11dに対応するので、そのLoパルス幅は、それぞれ同じ値σを有する。これに対して、第2,4,6信号は、凹部12a〜12cに対応するので、第2及び第6信号のHiパルス幅は同一の値τ1を有し、その値τ1は、第4信号のHiパルス幅τ2とは異なる。上記したように、第3の間隔Cは、第1の間隔Aの3倍の長さを有するので、第4信号のHiパルス幅τ2は、第2若しくは第6信号のHiパルス幅τ1と比べて3倍の値を有する。また、歯部11における、回転体10の円周方向に沿う長さは、第1及び第2歯対13,14の成す第1の間隔Aと等しくなっているので、第1,3,5,7信号のLoパルス幅σと、第2及び第6信号のHiパルス幅τ1とは同一となる。以下、煩雑となることを避けるために、第2及び第6信号のHiパルス幅τ1をτと示し、第4信号のLoパルス幅τ2を3τと示す。
【0056】
以上により、センサ部30は、回転体10が反時計回りに第1歯対13から第2歯対14までを完全に回転するまでに、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。このように、回転体10が反時計回りに正常に回転している場合、Loパルス幅は一定不変なのに対して、Hiパルス幅が周期的に、τ,3τ,τ,3τ,τ,3τ…と順次変動する。したがって、この場合においても、パルス周期は、T,2T,T,2T,T,2T…と順次変動する。
【0057】
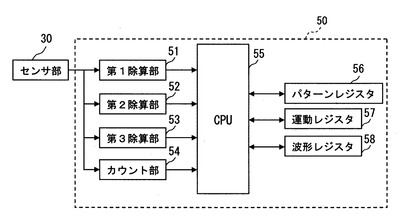
次に、本実施形態の第2の特徴点である、処理部50について説明する。処理部50は、センサ部30の出力信号に含まれる、複数のパルスのLoパルス幅の比を算出する第1除算部51と、複数のパルスのHiパルス幅の比を算出する第2除算部52と、任意のパルスのHiパルス幅とLoパルス幅との比を算出する第3除算部53と、各パルスの立ち上がりエッジと、立ち下がりエッジをカウントするカウント部54と、を有する。
【0058】
また、処理部50は、上記した各部51〜54の出力信号に基づいて、所定の演算処理を行うCPU55と、その演算処理に必要な値が記憶されたレジスタ56〜58と、を有する。パターンレジスタ56には、回転体10が正常に回転している場合に、第1除算部51若しくは第2除算部52から出力されることが期待される期待値に所定の誤差が付加された値が記憶されている。すなわち、パターンレジスタ56には、3に所定の誤差が付加された値と、1/3に所定の誤差が付加された値とが記憶されている。運動レジスタ57には、回転体10が正常に回転している場合に、第1除算部51若しくは第2除算部52から出力される期待値に所定の誤差が付加された値が記憶されている。波形レジスタ58には、回転体10が正常に回転している場合に、第3除算部53から出力される期待値に所定の誤差が付加された値が記憶されている。
【0059】
なお、第1除算部51、第2除算部52、CPU55、及びパターンレジスタ56によって、特許請求の範囲に記載のパターン判定部が構成され、第1除算部51、第2除算部52、CPU55、及び運動レジスタ57によって、特許請求の範囲に記載の運動状態判定部が構成される。また、第3除算部53、CPU55、及び波形レジスタ58によって、特許請求の範囲に記載の波形判定部が構成される。
【0060】
詳細に言えば、第1除算部51と第2除算部52とによって、特許請求の範囲に記載の第1〜4除算部のいずれかが構成される。第3除算部53が、特許請求の範囲に記載の第5除算部に相当する。CPU55が、特許請求の範囲に記載の第1〜5比較部、及び、回転数処理部の機能を担う。また、カウント部54が、特許請求の範囲に記載のカウント部に相当する。
【0061】
回転体10が運動し、それに応じたパルス信号がセンサ部30から上記した各部51〜54に入力されると、各部51〜54は以下に示す演算を行う。
【0062】
第1除算部51は、パルス信号に含まれる、任意のパルスである第1パルスのLoパルス幅によって、第1パルスの次に出力される第2パルスのLoパルス幅を除算した値と、第2パルスの次に出力される第3パルスのLoパルス幅によって、第2パルスのLoパルス幅を除算した値と、を順次算出する。これに対して、第2除算部52は、パルス信号に含まれる、第1パルスのHiパルス幅によって、第2パルスのHiパルス幅を除算した値と、第3パルスのHiパルス幅によって、第2パルスのHiパルス幅を除算した値と、を順次算出する。また、第3除算部53は、パルス信号に含まれる、任意のパルスのHiパルス幅をLoパルス幅によって除算した値を順次算出する。カウント部54は、パルス信号に含まれる、各パルスの立ち上がりエッジと、立ち下がりエッジとを順次カウントする。
【0063】
上記したように、回転体10が時計周りに回転している場合、センサ部30は、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力する。したがって、第1除算部51によって算出されることが期待される期待値は、3、若しくは、1/3となり、第2除算部52によって算出されることが期待される期待値は、1となる。このように、回転体10が時計周りに正常に回転している場合、第1除算部51から、歯部11の形成パターンに対応した値が順次出力される。
【0064】
これに対して、回転体10が反時計周りに回転している場合、センサ部30は、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。したがって、第1除算部51によって算出されることが期待される期待値は、1となり、第2除算部52によって算出されることが期待される期待値は、3、若しくは、1/3となる。このように、回転体10が反時計周りに正常に回転している場合、第2除算部52から、歯部11の形成パターンに対応した値が順次出力される。
【0065】
次に、CPU55の演算処理について説明する。CPU55は、第1及び第2除算部51,52から電気信号が入力されると、先ず、その値が、運動レジスタ57に記憶された値に近く、その誤差範囲内に収まっているか否かを判定する。その値が、誤差範囲内に収まっていない場合、CPU55は、回転体10の角速度が一定ではないと判断し、第1及び第2除算部51,52から出力された値に対応する、センサ部30から出力された信号を捨てる。これにより、回転体10が正常に回転しているにも関わらず、回転体10の角速度が一定ではないために、回転体10が正常に回転していない、という誤った判断が下されることが抑制される。
【0066】
また、CPU55は、第3除算部53から電気信号が入力されると、その値が、波形レジスタ58に記憶された値に近く、その誤差範囲内に収まっているか否かを判定する。その値が、誤差範囲内に収まっていない場合、CPU55は、波形が乱れていると判断し、第3除算部53から出力された値に対応する、センサ部30から出力された信号を捨てる。これにより、回転体10が正常に回転しているにも関わらず、パルス信号の波形が乱れているために、回転体10が正常に回転していない、という誤った判断が下されることが抑制される。
【0067】
次に、CPU55は、運動レジスタ57と波形レジスタ58とに基づいて選出された、センサ部30から出力される信号に基づく、第1及び第2除算部51,52の出力信号の値が、1よりも大きいか、小さいかを判定する。これにより、CPU55は、歯部11の形成パターンに対応した値を選出する。次いで、CPU55は、1よりも大きい、若しくは、1よりも小さい値を出力する第1除算部51若しくは第2除算部52の出力信号に基づいて、回転体10が正常に回転しているか否かを判定する。
【0068】
CPU55は、第1除算部51若しくは第2除算部52から出力された値の1つが、1よりも大きい場合、パターンレジスタ56から3に所定の誤差が付加された値を読み込み、1よりも大きい値が、読み込んだ値の範囲内に収まっているか否かを判定する。また、CPU55は、第1除算部51若しくは第2除算部52から出力された値の1つが、1よりも小さい場合、パターンレジスタ56から1/3に所定の誤差が付加された値を読み込み、1よりも小さい値が、読み込んだ値の範囲内に収まっているか否かを判定する。上記した値が、読み込んだ値の範囲内に収まっている場合、CPU55は、回転体10が正常に回転していると判断する。
【0069】
また、CPU55は、第1及び第2除算部51,52いずれから、1が順次入力されているか否かを判定する。上記したように、回転体10が時計回りに回転している場合に、第2除算部52から1が順次出力され、回転体10が反時計回りに回転している場合に、第1除算部51から1が順次出力される。したがって、CPU55は、第2除算部52から1が順次出力されている場合に、回転体10が時計回りに回転していると判断し、第1除算部51から1が順次出力されている場合に、回転体10が反時計回りに回転していると判断する。
【0070】
若しくは、CPU55は、各パルスのHiパルス幅が、一定であるか否か、若しくは、各パルスのLoパルス幅が一定であるか否かに基づいて、回転体10の回転方向を判断する。上記したように、回転体10が時計回りに回転している場合、Hiパルス幅は一定不変であり、回転体10が反時計回りに回転している場合、Loパルス幅は一定不変である。したがって、CPU55は、Hiパルス幅が一定の場合に、回転体10が時計回りに回転していると判断し、Loパルス幅が一定の場合に、回転体10が反時計回りに回転していると判断する。
【0071】
また、CPU55は、運動レジスタ57と波形レジスタ58とに基づいて選出された、センサ部30から出力される信号に基づく、カウント部54の出力信号が、回転体10の外周に形成された歯部11の数の2倍に達したか否かを判定する。2倍に達した場合、CPU55は、回転体10が1回転したと判断する。回転体10がセンサ部30に対して1回転した場合、センサ部30に対して1つの歯部11が通過する毎に、1つのパルスがセンサ部30から出力される。カウント部54は、そのパルスの立ち上がりと立ち下がりとをカウントするので、回転体10がセンサ部30に対して1回転した場合、カウント部54は、回転体10の外周に形成された歯部11の数の2倍をカウントする。なお、本実施形態では、カウント部54が、パルスの立ち上がりと立ち下がりとをカウントする例を示したが、カウント部54が、パルスの立ち上がり及び立ち下がりのいずれか一方をカウントするようにしても良い。この場合、CPU55は、カウント部54の出力信号が、回転体10の外周に形成された歯部11の数に達したか否かを判定し、歯部11の数に達した場合、CPU55は、回転体10が1回転したと判断する。
【0072】
次に、本実施形態に係る回転状態検出機構100の作用効果を説明する。上記したように、回転体10の外周に、第1の間隔Aで隣接配置された2つの歯部11から成る第1歯対13が、第3の間隔Cを介して、交互に形成されている。これにより、センサ部30から、上記した歯部11の形成パターンに対応したパルス信号が出力される。すなわち、センサ部30は、回転体10が時計周りに回転している場合、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力し、回転体10が反時計周りに回転している場合、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。このパルス信号のパターンは、歯部11の形成パターンに対応する。したがって、本実施形態で示したように、センサ部30から出力されるパルス信号に含まれる複数のパルスのLo(Hi)パルス幅の比を算出し、その値がパターンレジスタ56に記憶された値の範囲内に収まっているか否かを判定することで、回転体10が正常に回転しているか否かを判定することができる。
【0073】
ところで、回転体の一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成の場合、回転体が正常に回転しているか否かを確実に判定するには、センサ部に対する欠落部の位置が定まらないので、最長で、回転体が1回転しなければならない。これに対して、本実施形態に示す回転状態検出機構100では、複数の第1歯対13と第2歯対14とが、回転体10の外周に交互に形成された構成となっている。したがって、上記構成の場合、回転体10が1回転する前に、回転体10が正常に回転しているか否かを確実に判定することができる。以上により、回転状態検出機構100は、回転体の外周の一部に欠落部が設けられた構成と比べて、回転体10が正常に回転しているか否かを判定する時間が短縮された構成となっている。
【0074】
以上、本発明の好ましい実施形態について説明したが、本発明は上記した実施形態になんら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することが可能である。
【0075】
第1実施形態では、複数のパルスのLo(Hi)パルス幅の比に基づいて、回転体10が正常に回転しているか否かを判定した。しかしながら、各パルスのパルス周期に基づいて、回転体10が正常に回転しているか否かを判定しても良い。第1実施形態で示したように、回転体10が正常に回転している場合、回転体10の回転方向に依らず、センサ部30から出力されるパルス信号の各パルスのパルス周期は、T,2T,T,2T,T,2T…と順次変動する。したがって、例えば、第4除算部(図示略)にて、第1パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、第3パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、を順次算出する。そして、第2のパターンレジスタ(図示略)に記憶された、2に所定の誤差が付加された値、若しくは、1/2に所定の誤差が付加された値をCPU55が読み込む。その次に、CPU55が、第4除算部から出力された値が、第2のパターンレジスタから読み込んだ値の範囲内に収まっているか否かを判定する。以上により、回転体10が正常に回転しているか否かを判定することができる。
【0076】
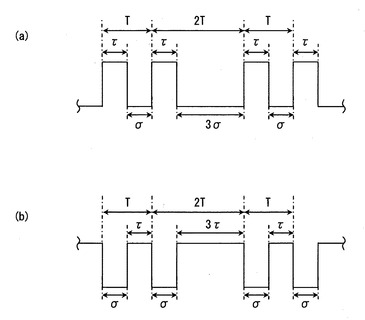
また、第1実施形態では、第1の間隔Aと第2の間隔Bとが同一の場合を説明した。しかしながら、例えば図7、及び図8の(a)に示すように、第1の間隔Aと第2の間隔Bとが異なっても良い。図7に示す回転体10では、第2の間隔Bが、第1の間隔Aよりも3倍長く、第3の間隔Cが、第1の間隔Aよりも5倍長くなっている。回転体10が時計回りに第1歯対13から第2歯対14まで回転した場合、センサ部30からは、電圧レベルが、τ,σ,τ,5σ,τ,3σ,τの出力時間で、順次反転するパルス信号が出力される。この場合、第1除算部51からは、5,5/3,3/5が出力され、第2除算部52からは、1が出力される。このように、回転体10が時計回りに回転している場合、第1除算部51から、歯部11の形成パターンに対応した値が順次出力される。したがって、CPU55は、第1除算部51の出力信号に基づいて、回転体10が正常に回転しているか否かを判定することができる。これに対して、回転体10が反時計回りに第1歯対13から第2歯対14まで回転した場合、センサ部30からは、電圧レベルが、σ,τ,σ,5τ,σ,3τ,σの出力時間で、順次反転するパルス信号が出力される。したがって、第1除算部51からは、1が出力され、第2除算部52からは、5,5/3,3/5が出力される。このように、回転体10が反時計回りに回転している場合、第2除算部52から、歯部11の形成パターンに対応した値が順次出力される。したがって、CPU55は、第2除算部52の出力信号に基づいて、回転体10が正常に回転しているか否かを判定することができる。
【0077】
この変形例の場合、CPU55は、パターンレジスタ56に記憶された、5に所定の誤差が付加された値を読み込む。そして、CPU55は、第1除算部51若しくは第2除算部52から出力された、1及び5/3よりも十分に大きい値である5が、パターンレジスタ56から読み込んだ値の範囲内に収まっているか否かを判定することで、回転体10が正常に回転しているか否かを判定する。上記した値が、読み込んだ値の範囲内に収まっている場合、CPU55は、回転体10が正常に回転していると判断する。図7は、回転体の変形例を説明するための正面図である。図8は、図7に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【0078】
なお、図7及び図8に示した変形例においても、パルス周期に基づいて、回転体10が正常に回転しているか否かを判定しても良い。この変形例の場合、各パルスのパルス周期は、T,3T,2T,3T,T…と順次変動する。したがって、例えば、先の変形例で示した第4除算部にて、第1パルスのパルス幅によって、第2パルスのパルス周期を除算した値と、第3パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、を順次算出する。そして、先の変形例で示した第2のパターンレジスタに記憶された、3に所定の誤差が付加された値をCPU55が読み込む。最後に、CPU55が、第4除算部から出力された、1及び3/2よりも十分に大きい値である3が、読み込んだ値の範囲内に収まっているか否かを判定する。以上により、回転体10が正常に回転しているか否かを判定することができる。
【符号の説明】
【0079】
10・・・回転体
11・・・歯部
12・・・凹部
13・・・第1歯対
14・・・第2歯対
30・・・センサ部
50・・・処理部
100・・・回転状態検出機構
【技術分野】
【0001】
本発明は、外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に示されるように、被検出歯が等間隔毎に形成されたクランクロータ(回転体)、及び、そのクランクロータの近傍に配置され、被検出歯が通過する毎に通過検出信号(パルス信号)を出力する半導体磁気センサを備える内燃機関のクランク角検出装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−32620号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記した内燃機関のクランク角検出装置では、クランクロータを支持する回転軸が、クランクロータの回転方向に遊びを有するために、外部からの振動などによって、クランクロータが回転方向に振動する虞がある。例えば、クランクロータが、半導体磁気センサに対して、1つの被検出歯と、その被検出歯と隣接する被検出歯との間で振動する場合、パルスが半導体磁気センサから等間隔毎に出力されることとなる。これに対して、クランクロータが正常に回転している場合、被検出歯は等間隔毎に形成されているので、上記した振動時と同様にして、パルスが半導体磁気センサから等間隔毎に出力されることとなる。このように、クランクロータが振動している、クランクロータが正常に回転している、いずれの場合においても、パルスが半導体磁気センサから等間隔毎に出力されるため、クランクロータが正常に回転しているのか否かを判定することが困難であった。
【0005】
なお、特許文献1には、クランクロータの一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成例が示されている。このような構成では、クランクロータが1回転した場合、半導体磁気センサからは、その欠落部に対応したパルスが出力されるので、半導体磁気センサから出力される信号に、上記した欠落部に対応したパルスが出力されたか否かを判定することで、クランクロータが正常に回転しているか否かを判定することは可能である。しかしながら、この場合、欠落部に対応したパルスを確実に検出するには、半導体磁気センサに対する欠落部の位置が定まらないので、クランクロータが最長で1回転しなければならない。そのため、クランクロータが正常に回転しているか否かを判定する時間が長くなる、という問題が生じる。
【0006】
そこで、本発明は上記問題点に鑑み、回転体が正常に回転しているか否かを判定する時間が短縮された回転状態検出機構を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記した目的を達成するために、請求項1に記載の発明は、外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構であって、複数の歯部はそれぞれ同一形状であり、回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっており、処理部は、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定することで、回転体が正常に回転しているか否かを判定するパターン判定部を有することを特徴とする。
【0008】
以下においては、回転体が一方向に回転しているとする。そして、その回転状態において、センサ部は、歯部がセンサ部を通過する度にパルスを出力し、2つの歯部の間がセンサ部を通過する場合にパルスを出力しないものとする。換言すれば、センサ部は、歯部がセンサ部を通過する度に、電圧レベルがHiレベルの信号を出力し、2つの歯部の間がセンサ部を通過する度に、電圧レベルがLoレベルの信号を出力するものとする。
【0009】
請求項1に記載の発明では、回転体の外周に、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成されている。そして、第1歯対を成す1つの歯部と、それと隣接する第2歯対を成す1つの歯部との間隔が、第1の間隔及び第2の間隔とは異なる第3の間隔となっている。
【0010】
したがって、センサ部は、回転体が第1歯対から第2歯対までを完全に回転するまでに、以下に示す信号を順次出力する。すなわち、センサ部は、第1歯対を成す一方の歯部に対応するHiレベルの信号と、第1の間隔に対応するLoレベルの信号と、第1歯対を成す他方の歯部に対応するHiレベルの信号と、第3の間隔に対応するLoレベルの信号と、第2歯対を成す一方の歯部に対応するHiレベルの信号と、第2の間隔に対応するLoレベルの信号と、第2歯部を成す他方の歯部に対応するHiレベルの信号と、を順次出力する。
【0011】
請求項1に記載の発明では、歯部それぞれが同一形状となっており、上記したHiレベルの信号は、歯部の形状に依存するので、その出力時間(パルス幅)は同一となる。これに対して、上記したLoレベルの信号は、隣接する歯部の間隔に依存するので、第1の間隔に対応するLoレベルの信号の出力時間と、第2の間隔に対応するLoレベルの信号の出力時間それぞれは、第3の間隔に対応するLoレベルの信号の出力時間とは異なる。このように、回転体が正常に回転している場合、センサ部からは、一定のパルス幅を有するパルスが、歯部の間隔に依存した時間毎に出力される。すなわち、歯部の形成パターンに対応した信号が、センサ部から出力される。
【0012】
これに対して、例えば、回転体がセンサ部に対して1つの歯部とその歯部と隣接する歯部との間で振動する場合、センサ部からは、パルスが等間隔毎に出力される。このように、回転体が振動している場合、回転体が正常に回転している場合とは異なり、歯部の形成パターンに対応した信号が、センサ部から出力されない。
【0013】
以上により、パターン判定部によって、パルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定することで、回転体が正常に回転しているか否かを判定することができる。
【0014】
ところで、回転体の一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成の場合、回転体が正常に回転しているか否かを確実に判定するには、センサ部に対する欠落部の位置が定まらないので、最長で、回転体が1回転しなければならない。これに対して、本発明では、複数の第1歯対と第2歯対とが、回転体の外周に交互に形成された構成となっている。したがって、本発明の場合、回転体が1回転する前に、回転体が正常に回転しているか否かを確実に判定することができる。以上により、請求項1に記載の回転状態検出機構は、回転体の一部に欠落部が設けられた構成と比べて、回転体が正常に回転しているか否かを判定する時間が短縮された構成となっている。
【0015】
請求項2に記載のように、センサ部は、回転体が一方向に回転している状態で、センサ部に対して歯部が通過する毎にパルスを出力する。そして、パターン判定部は、回転体が一方向に回転している状態で、センサ部の出力信号における、任意のパルスである、第1パルスの立ち下がり時から、第1パルスの次に出力される第2パルスの立ち上がり時までの第1時間と、第2パルスの立ち下がり時から、第2パルスの次に出力される第3パルスの立ち上がり時までの第2時間とを比較した値、及び、第2時間と、第3パルスの立ち下がり時から、第3パルスの次に出力される第4パルスの立ち上がり時までの第3時間とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する構成が好適である。
【0016】
以下、第1歯対を成す一方の歯部がセンサ部を通過した際に出力されるパルスを第1パルスとし、第1歯対を成す他方の歯部がセンサ部を通過した際に出力されるパルスを第2パルスとする。そして、第2歯対を成す一方の歯部がセンサ部を通過した際に出力されるパルスを第3パルスとし、第2歯対を成す他方の歯部がセンサ部を通過した際に出力されるパルスを第4パルスとする。
【0017】
請求項1に記載したように、第1の間隔及び第2の間隔と第3の間隔とは異なる。したがって、第1パルスの立ち下がり時から、第2パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第1時間)、及び、第3パルスの立ち下がり時から、第4パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第3時間)と、第2パルスの立ち下がり時から、第3パルスの立ち上がり時までに出力されるLoレベルの信号の出力時間(第2時間)とは異なる。したがって、第1時間と第2時間とを比較した値、及び、第2時間と第3時間とを比較した値の少なくとも1つを算出し、その値が、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0018】
なお、請求項2では、回転体が他方向に回転している状態で、センサ部に対して2つの歯部の間を通過する毎にパルスが出力される構成となっている。したがって、回転体が他方向に回転している状態では、上記した第1時間が第1パルスのパルス幅(第1パルス幅)に対応し、第2時間が第2パルスのパルス幅(第2パルス幅)に対応し、第3時間が第3パルスのパルス幅(第3パルス幅)に対応する。これにより、回転体が他方向に回転している状態では、請求項2に記載のように、第1パルス幅(第1時間)と第2パルス幅(第2時間)とを比較した値、及び、第2パルス幅(第2時間)と第3パルス幅(第3時間)とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する。すなわち、第1時間と第2時間とを比較した値、及び、第2時間と第3時間とを比較した値の少なくとも1つを算出し、その値が、算出されることが期待される期待値であるか否かを判定する。すなわち、パルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0019】
以上、示したように、請求項2に記載の発明の場合、回転体が正常に回転しているか否かを判定するには、第1時間と第2時間、若しくは、第2時間と第3時間を得ることができればよい。したがって、回転体がセンサ部に対して、第1歯対を成す一方の歯部から、第1歯対を成す他方の歯部と隣接する第2歯対を成す一方の歯部まで、若しくは、第1歯対を成す他方の歯部から、第2歯部を成す他方の歯部まで回転すれば良い。すなわち、回転体が第1歯対から第2歯対までを完全に回転しなくとも、回転体が正常に回転しているか否かを判定することができる。
【0020】
なお、請求項2に記載のパターン判定部の具体的な構成としては、例えば請求項3に記載のように、回転体がセンサ部に対して、第1歯対が成す第1の間隔を回転するまでに、センサ部が出力する信号の第1出力時間と、第1歯対と第2歯対とが成す第3の間隔を回転するまでに、センサ部が出力する信号の第2出力時間との比、及び、第2歯対が成す第2の間隔を回転するまでに、センサ部が出力する信号の第3出力時間と、第2出力時間との比の少なくとも一方を出力する第1除算部と、該第1除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第1比較部と、を有する構成を採用することができる。なお、請求項3に記載の所定の範囲は、第1除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0021】
また、回転体が正常に回転しているか否かを判定するパターン判定部としては、請求項4に記載のように、パターン判定部は、センサ部の出力信号における、任意のパルスである、第1パルスのパルス周期(第1パルス周期)と、第1パルスの次に出力される第2パルスのパルス周期(第2パルス周期)とを比較した値、及び、第2パルス周期と、第2パルスの次に出力される第3パルスのパルス周期(第3パルス周期)とを比較した値の少なくとも一方に基づいて、回転体が正常に回転しているか否かを判定する構成を採用することができる。
【0022】
以下、第1歯対を成す一方の歯部と、第1の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第1パルス周期とし、第1歯対を成す他方の歯部と、第3の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第2パルス周期とする。そして、第2歯対を成す一方の歯部と、第2の間隔をセンサ部が通過するまでにセンサ部から出力される信号の時間を第3パルス周期とする。
【0023】
請求項1に記載したように、第1の間隔及び第2の間隔と第3の間隔とは異なるので、第1パルス周期及び第3パルス周期と第2パルス周期とは異なる。したがって、第1パルス周期と第2パルス周期とを比較した値、及び、第2パルス周期と第3パルス周期とを比較した値の少なくとも1つを算出し、その値が、歯部の形成パターンに対応しているか否かを判定する。これにより、回転体が正常に回転しているか否かを判定することができる。
【0024】
そして、請求項4に記載のパターン判定部の具体的な構成としては、例えば請求項5に記載のように、パターン判定部は、回転体が、センサ部に対して、第1歯対を成す一方の歯部と、第1歯対が成す第1の間隔とを回転するまでに、センサ部が出力する信号の第4出力時間と、第1歯対を成す他方の歯部と、第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、センサ部が出力する信号の第5出力時間との比、及び、第2歯対を成す一方の歯部と、第2歯対が成す第2の間隔とを回転するまでにセンサ部が出力する信号の第6出力時間と、第5出力時間との比の少なくとも一方を出力する第2除算部と、該第2除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第2比較部と、を有する構成を採用することができる。なお、請求項5に記載の所定の範囲は、第2除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0025】
ところで、回転体の角速度が一定ではない場合、上記した各パルスのパルス周期やパルス幅が変動する。そのため、各パルスのパルス周期やパルス幅などを比較することで回転体が正常に回転しているか否かを算出する場合、比較した値が、回転体の角速度が一定の状態で算出されることが期待される期待値とは異なる虞がある。この場合、回転体が正常に回転しているにも関わらず、回転体が正常に回転していない、という誤った判定が下される虞がある。そこで、請求項6に記載のように、処理部が、回転体の角速度が一定か否かを判定する運動状態判定部を有し、パターン判定部は、運動状態判定部によって回転体の角速度が一定であると判定された場合に、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するのが好ましい。これによれば、回転体が正常に回転しているにも関わらず、回転体の角速度が一定ではないために、回転体が正常に回転していない、という誤った判定が下されることが抑制される。
【0026】
運動状態判定部の具体的な構成としては、例えば請求項7に記載のように、運動状態判定部は、回転体が、センサ部に対して、第1歯対が成す第1の間隔を回転するまでに、センサ部が出力する信号の第1出力時間と、第1歯対と第2歯対とが成す第3の間隔を回転するまでに、センサ部が出力する信号の第2出力時間との比、及び、第2歯対が成す第2の間隔を回転するまでに、センサ部が出力する信号の第3出力時間と、第2出力時間との比の少なくとも一方を出力する第3除算部と、該第3除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第3比較部と、を有する構成を採用することができる。
【0027】
または、請求項8に記載のように、運動状態判定部は、回転体が、センサ部に対して、第1歯対を成す一方の歯部と、第1歯対が成す第1の間隔とを回転するまでに、センサ部が出力する信号の第4出力時間と、第1歯対を成す他方の歯部と、第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、センサ部が出力する信号の第5出力時間との比、及び、第2歯対を成す一方の歯部と、第2歯対が成す第2の間隔とを回転するまでにセンサ部が出力する信号の第6出力時間と、第5出力時間との比の少なくとも一方を出力する第4除算部と、該第4除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第4比較部と、を有する構成を採用することができる。なお、請求項7に記載の所定の範囲は、第3除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。また、請求項8に記載の所定の範囲は、第4除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0028】
ところで、回転体が回転している状態で、回転状態検出機構に振動が印加された場合、上記した各パルスのパルス周期やパルス幅が変動する。そのため、各パルスのパルス周期やパルス幅などを比較することで回転体が正常に回転しているか否かを算出する場合、比較した値が、回転体に振動が印加されていない状態で算出されることが期待される期待値とは異なる虞がある。この場合、回転体が正常に回転しているにも関わらず、回転体が正常に回転していない、という誤った判定が下される虞がある。そこで、請求項9に記載のように、処理部が、センサ部から出力されるパルス信号の波形が正常か否かを判定する波形判定部を有し、パターン判定部は、波形判定部によってパルス信号の波形が正常であると判定された場合に、センサ部から出力されるパルス信号のパターンが、歯部の形成パターンに対応しているか否かを判定するのが好ましい。これによれば、回転体が正常に回転しているにも関わらず、回転体に印加された振動によって、回転体が正常に回転していない、という誤った判定が下されることが抑制される。
【0029】
波形判定部の具体的な構成としては、例えば請求項10に記載のように、波形判定部は、センサ部の出力信号における、任意のパルスのパルス幅と、そのパルスの立ち下がり時から、そのパルスの次に出力されるパルスの立ち上がり時までの時間との比を出力する第5除算部と、該第5除算部によって出力された値が所定の範囲内に収まっているか否かを判定する第5比較部と、を有する構成を採用することができる。なお、請求項10に記載の所定の範囲は、第5除算部によって算出されることが期待される期待値に、所定の誤差範囲が付加された範囲である。
【0030】
請求項11に記載のように、第1の間隔と、第2の間隔が同一の構成を採用することができる。若しくは、請求項12に記載のように、第1の間隔と、第2の間隔が異なる構成を採用することもできる。また、請求項13に記載のように、第3の間隔は、第1の間隔及び第2の間隔よりも長い構成を採用することができる。
【0031】
請求項14に記載のように、処理部は、センサ部から出力されるパルスの立ち上がり数と、立ち下がり数との少なくとも一方を数えるカウント部と、カウント部の出力信号に基づいて、回転体の回転数を算出する回転数処理部と、を有する構成を採用することができる。
【0032】
請求項15に記載のように、センサ部は、磁束を回転体に印加するように配置された磁石と、回転体の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子と、該磁電変換素子の出力信号をアナログ信号からディジタル信号に変換するA−D変換部と、を有する構成を採用することができる。
【図面の簡単な説明】
【0033】
【図1】参考例としての回転体とセンサ部の概略構成を示す正面図である。
【図2】図1に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図3】第1実施形態に係る回転体とセンサ部の概略構成を示す正面図である。
【図4】図3に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図5】回転体が第1歯対から第2歯対までを完全に回転するまでに出力されるパルス信号を説明するための波形図であり、(a)は、回転体が時計回りに回転している状態で出力されるパルス信号、(b)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【図6】第1実施形態に係る処理部の概略構成を説明するためのブロック図である。
【図7】回転体の変形例を説明するための正面図である。
【図8】図7に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【発明を実施するための形態】
【0034】
以下、本発明を説明する前に、図1及び図2に基づいて、参考例としての回転状態検出機構100を説明する。
(参考例)
図1は、参考例としての回転体とセンサ部の概略構成を示す正面図である。図2は、図1に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【0035】
回転状態検出機構100は、要部として、外周に複数の歯部11が所定の間隔(第1の間隔A)で形成された回転体10と、該回転体10の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部30と、該センサ部30の出力信号を処理する処理部50と、を有する。本参考例では、回転体10と、センサ部30とを説明し、処理部50の説明を省略する。
【0036】
回転体10は、空気よりも透磁率が高い材料によって形成されており、図1、及び図2の(a)に示すように、回転体10の外周には、同一形状を有する複数の歯部11が第1の間隔Aで等間隔毎に形成されている。そして、歯部11における、回転体10の円周方向に沿う長さと、2つの歯部11の間に形成された凹部12における、回転体10の円周方向に沿う長さ(第1の間隔A)とが等しくなっている。なお、上記した2つの歯部11の間隔は、一方の歯部11における、他方の歯部11と回転体10の円周方向にて対向する側部から、他方の歯部11における、一方の歯部11と回転体10の円周方向にて対向する側部との間隔に相当する。
【0037】
センサ部30は、要部として、磁束を回転体10に印加するように配置された磁石31と、回転体10の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子32と、該磁電変換素子32の出力信号をアナログ信号からディジタル信号に変換するA−D変換部(図示略)と、を有する。磁電変換素子32は、回転体10の回転方向に沿って並列配置された、2つの磁電変換素子32a,32bからなる。これら2つの磁電変換素子32a,32bの隣接距離は、歯部11若しくは凹部12における、回転体10の円周方向に沿う長さ(第1の間隔A)よりも短くなっている。そして、一方の磁電変換素子32aの出力端子は、差動増幅回路(図示略)の正相入力端子に接続され、他方の磁電変換素子32bの出力端子は、差動増幅回路の逆相入力端子に接続されている。したがって、差動増幅回路からは、2つの磁電変換素子32a,32bそれぞれの出力信号の差分に応じた信号が出力される。その出力信号は、A−D変換部に入力され、その差分に応じたパルス信号がA−D変換部から出力される。
【0038】
回転体10が回転すると、回転体10の外周に形成された歯部11や凹部12も回転する。すると、歯部11や凹部12の回転に伴って、回転体10に印加される磁束の印加方向が変動する。この結果、磁電変換素子32に印加される磁束の印加方向と量が変動し、磁電変換素子32から出力される信号が変動する。
【0039】
上記したように、2つの磁電変換素子32a,32bが回転体10の回転方向に沿って配置され、その隣接距離が第1の間隔Aよりも短くなっている。したがって、例えば、一方の磁電変換素子32aと1つの歯部11とが対向している場合、他方の磁電変換素子32bは、歯部11と遠ざかり、凹部12と近くなる。磁束は、空気よりも透磁率が高い歯部11を透過しようとするので、歯部11と対向する一方の磁電変換素子32aに印加される磁束の量が、歯部11と遠く、凹部12と近い他方の磁電変換素子32bに印加される磁束の量よりも多くなる。この結果、2つの磁電変換素子32a,32bそれぞれから出力される信号の電圧レベルに差が生じ、上記した差動増幅回路から出力される信号が変動する。
【0040】
本参考例では、回転体10が時計回り(図1に破線矢印で示す方向)に回転している状態で、センサ部30に対して歯部11が通過する度に、差動増幅回路から正の電圧レベルの信号が出力され、センサ部30に対して凹部12が通過する度に、差動増幅回路から負の電圧レベルの信号が出力されるように、2つの磁電変換素子32a,32bそれぞれの出力端子が差動増幅回路の入力端子に接続されている。したがって、回転体10が時計回りに回転している状態では、図2の(b)に示すように、センサ部30に対して歯部11が通過する度に、A−D変換部(センサ部30)からHiレベルの信号が出力され、センサ部30に対して凹部12が通過する度に、A−D変換部(センサ部30)からLoレベルの信号が出力される。これとは反対に、回転体10が反時計回り(図1に一点鎖線矢印で示す方向)に回転している状態では、位相が180°ずれるので、図2の(c)に示すように、センサ部30に対して歯部11が通過する度に、A−D変換部(センサ部30)からLoレベルの信号が出力され、センサ部30に対して凹部12が通過する度に、A−D変換部(センサ部30)からHiレベルの信号が出力される。このように、2つの磁電変換素子32a,32bが差動増幅回路に接続された構成の場合、回転方向が反転すると、センサ部30から出力される信号の電圧レベルが反転する。
【0041】
上記したように、歯部11及び凹部12それぞれの回転体10の円周方向に沿う長さが等しくなっている。したがって、図2の(b)及び図2の(c)それぞれに示すパルスのデューティ比(パルス幅をパルス周期で割った値)は、0.5(50%)となっている。
【0042】
ここで、パルス幅とは、図2の(b)及び図2の(c)それぞれに記号τによって示すように、Hiレベルの信号が出力される時間を示し、パルス周期とは、図2の(b)及び図2の(c)それぞれに記号Tによって示すように、Hiレベルの信号が出力される時間と、Loレベルの信号が出力される時間(図2の(b)及び図2の(c)それぞれに記号σによって示されている時間)との和を示す。なお、Hiレベルの信号が出力される時間とは、1つのパルスの立ち上がりエッジから、そのパルスの立ち下がりエッジまでの時間を示し、Loレベルの信号が出力される時間とは、1つのパルスの立ち下がりエッジから、そのパルスの次に出力されるパルスの立ち上がりエッジまでの時間を示す。以下においては、煩雑となることを避けるために、Hiレベルの信号が出力される時間をHiパルス幅と示し、Loレベルの信号が出力される時間をLoパルス幅と示す。
【0043】
回転体10が時計回りに回転している場合、Hiパルス幅は、歯部11における回転体10の円周方向に沿う長さに依存し、Loパルス幅は、凹部12における回転体10の円周方向に沿う長さに依存する。これとは反対に、回転体10が反時計回りに回転している場合、Hiパルス幅は、凹部12における回転体10の円周方向に沿う長さに依存し、Loパルス幅は、歯部11における回転体10の円周方向に沿う長さに依存する。上記したように、本参考例では、歯部11及び凹部12それぞれの回転体10の円周方向に沿う長さは等しいので、Hiパルス幅とLoパルス幅とは相等しい。
【0044】
次に、本参考例で示した回転状態検出機構100の問題点を説明する。この回転状態検出機構100では、図2に示すように、回転体10が正常に回転している場合、パルスがセンサ部30から等間隔毎に出力される。これに対して、例えば、回転体10がセンサ部30に対して、1つの歯部11と、それと隣接する歯部11との間(凹部12)で振動する場合、回転体10が正常に回転している場合と同様にして、パルスがセンサ部30から等間隔毎に出力される。もちろん、回転体10が振動している場合と、回転体10が正常に回転している場合とでは、パルスのデューティ比は異なる。したがって、デューティ比を算出することで、回転体10が正常に回転しているのか否かを判定することも可能ではある。しかしながら、回転体10の角速度が変動した場合、各パルスのデューティ比が変動するので、各パルスのデューティ比が、算出されることが期待される値0.5(50%)とは異なる虞がある。その結果、回転体10が正常に回転しているにも関わらず、回転体10が正常に回転していない、という誤った判定が下される虞がある。また、回転体10が正常に回転している、回転体10が振動している、いずれの場合においても、パルスがセンサ部30から等間隔毎に出力されるため、パルスの出力パターンによって、回転体10が正常に回転しているのか否かを判定することは困難である。これら問題点に対して、本発明に係る回転状態検出機構100は、以下の実施形態に示す構成を採用することで、回転体10が正常に回転しているか否かを判定している。
【0045】
(第1実施形態)
本発明の第1実施形態を、図3〜図6に基づいて説明する。図3は、第1実施形態に係る回転体とセンサ部の概略構成を示す正面図である。図4は、図3に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。図5は、回転体が第1歯対から第2歯対までを完全に回転するまでに出力されるパルス信号を説明するための波形図であり、(a)は、回転体が時計回りに回転している状態で出力されるパルス信号、(b)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。図6は、第1実施形態に係る処理部の概略構成を説明するためのブロック図である。なお、図3は、参考例として示した図1に対応しており、図4は、参考例として示した図2に対応している。
【0046】
第1実施形態に係る回転状態検出機構100は、参考例として示した回転状態検出機構100によるものと共通するところが多いので、以下、共通部分については詳しい説明は省略し、異なる部分を重点的に説明する。なお、参考例に示した要素と同一の要素には、同一の符号を付与するものとする。
【0047】
本実施形態に係る回転状態検出機構100は、歯部11の形成パターンと、参考例では説明しなかった処理部50とに特徴がある。
【0048】
先ず、本実施形態の第1の特徴点である、歯部11の形成パターンについて説明する。回転体10の外周には、歯部11の間隔が第1の間隔Aで隣接配置された2つの歯部11a,11bから成る第1歯対13と、第2の間隔Bで隣接配置された2つの歯部11c,11dから成る第2歯対14とが交互に複数形成されている。そして、第1歯対13を成す1つの歯部11と、それと隣接する第2歯対14を成す1つの歯部11との間隔が、第1の間隔A及び第2の間隔Bとは異なる第3の間隔Cとなっている。本実施形態では、第1の間隔Aと第2の間隔Bとが同一なっており、第1歯対13と第2歯対14とは、同一の形状を有する。したがって、以下においては、煩雑となることを避けるために、第2歯対14を第1歯対13と示し、第2の間隔Bを第1の間隔Aと示す。なお、図3及び図4においても、第2の間隔Bを第1の間隔Aと示す。
【0049】
本実施形態に係る回転体10は、歯部11が第1の間隔Aで形成された回転体(参考例で示した回転体10)における、任意の1つの歯部11と回転体10の円周方向で隣接する2つの歯部11の一方を除去することで形成される。参考例と同様にして、歯部11における回転体10の円周方向に沿う長さは、第1の間隔Aと等しくなっており、第3の間隔Cは、第1の間隔Aの3倍の長さを有する。
【0050】
センサ部30は、回転体10が時計回りに回転すると、回転体10が第1歯対13から第2歯対14までを完全に回転するまでに、下記に示す信号を順次出力する。すなわち、センサ部30は、第1歯対13を成す一方の歯部11aに対応するHiレベルの第1信号と、第1歯対13が成す凹部12aに対応するLoレベルの第2信号と、第1歯対13を成す他方の歯部11bに対応するHiレベルの第3信号とを出力し、歯部11bと、それと隣接する第2歯対14を成す一方の歯部11cとが成す凹部12cに対応するLoレベルの第4信号と、歯部11cに対応するHiレベルの第5信号と、第2歯対14が成す凹部12bに対応するLoレベルの第6信号と、第2歯対14を成す他方の歯部11dに対応するHiレベルの第7信号と、を順次出力する。
【0051】
本実施形態では、上記した、第2信号、第4信号、及び第6信号それぞれの出力時間のいずれかが、特許請求の範囲に記載の第1時間〜第3時間のいずれかに相当し、第1信号、第3信号、及び第5信号それぞれの出力時間のいずれかが、特許請求の範囲に記載の第1パルス幅〜第3パルス幅のいずれかに相当する。そして、第1信号が、特許請求の範囲に記載の第1パルスに相当し、第3信号が、特許請求の範囲に記載の第2パルスに相当し、第5信号が、特許請求の範囲に記載の第3パルスに相当し、第7信号が、特許請求の範囲に記載の第4パルスに相当する。また、第2信号の出力時間が、特許請求の範囲に記載の第1出力時間に相当し、第4信号の出力時間が、特許請求の範囲に記載の第2出力時間に相当し、第6信号の出力時間が、特許請求の範囲に記載の第3出力時間に相当する。したがって、第1信号と第2信号の出力時間の和が、特許請求の範囲に記載の第4出力時間に相当し、第3信号と第4信号の出力時間の和が、特許請求の範囲に記載の第5出力時間に相当し、第2信号と第6信号の出力時間の和が、特許請求の範囲に記載の第6出力時間に相当する。
【0052】
以下、第1〜第7信号を、図4、及び図5の(a)に基づいて説明する。第1,3,5,7信号それぞれは、歯部11a〜11dに対応するので、そのHiパルス幅は、それぞれ同じ値τを有する。これに対して、第2,4,6信号は、凹部12a〜12cに対応するので、第2及び第6信号それぞれのLoパルス幅は同一の値σ1を有し、その値σ1は、第4信号のLoパルス幅σ2とは異なる。上記したように、第3の間隔Cは、第1の間隔Aの3倍の長さを有するので、第4信号のLoパルス幅σ2は、第2若しくは第6信号のLoパルス幅σ1と比べて3倍の値を有する。また、歯部11における、回転体10の円周方向に沿う長さは、第1及び第2歯対13,14の成す第1の間隔Aと等しくなっているので、第1,3,5,7信号のHiパルス幅τと、第2及び第6信号のLoパルス幅σ1とは同一となる。以下、煩雑となることを避けるために、第2及び第6信号のLoパルス幅σ1をσと示し、第4信号のLoパルス幅σ2を3σと示す。
【0053】
以上により、センサ部30は、回転体10が時計回りに第1歯対13から第2歯対14までを完全に回転するまでに、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力する。このように、回転体10が時計回りに正常に回転している場合、Hiパルス幅は一定不変なのに対して、Loパルス幅は周期的に、σ,3σ,σ,3σ,σ,3σ…と順次変動する。なお、参考例で示したように、パルス周期は、Hiパルス幅とLoパルス幅との和によって表される。したがって、上記したτとσとの和をTとすると、パルス周期は、T,2T,T,2T,T,2T…と順次変動する。
【0054】
次に、回転体10が反時計回りに回転する場合を説明する。回転体10が反時計回りに回転する場合、電圧レベルが反転したパルス信号が、センサ部30から出力される。すなわち、センサ部30は、図4の(c)に示すように、Loレベルの第1信号と、Hiレベルの第2信号と、Loレベルの第3信号と、Hiレベルの第4信号と、Loレベルの第5信号と、Hiレベルの第6信号と、Loレベルの第7信号と、を順次出力する。
【0055】
第1,3,5,7信号は、歯部11a〜11dに対応するので、そのLoパルス幅は、それぞれ同じ値σを有する。これに対して、第2,4,6信号は、凹部12a〜12cに対応するので、第2及び第6信号のHiパルス幅は同一の値τ1を有し、その値τ1は、第4信号のHiパルス幅τ2とは異なる。上記したように、第3の間隔Cは、第1の間隔Aの3倍の長さを有するので、第4信号のHiパルス幅τ2は、第2若しくは第6信号のHiパルス幅τ1と比べて3倍の値を有する。また、歯部11における、回転体10の円周方向に沿う長さは、第1及び第2歯対13,14の成す第1の間隔Aと等しくなっているので、第1,3,5,7信号のLoパルス幅σと、第2及び第6信号のHiパルス幅τ1とは同一となる。以下、煩雑となることを避けるために、第2及び第6信号のHiパルス幅τ1をτと示し、第4信号のLoパルス幅τ2を3τと示す。
【0056】
以上により、センサ部30は、回転体10が反時計回りに第1歯対13から第2歯対14までを完全に回転するまでに、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。このように、回転体10が反時計回りに正常に回転している場合、Loパルス幅は一定不変なのに対して、Hiパルス幅が周期的に、τ,3τ,τ,3τ,τ,3τ…と順次変動する。したがって、この場合においても、パルス周期は、T,2T,T,2T,T,2T…と順次変動する。
【0057】
次に、本実施形態の第2の特徴点である、処理部50について説明する。処理部50は、センサ部30の出力信号に含まれる、複数のパルスのLoパルス幅の比を算出する第1除算部51と、複数のパルスのHiパルス幅の比を算出する第2除算部52と、任意のパルスのHiパルス幅とLoパルス幅との比を算出する第3除算部53と、各パルスの立ち上がりエッジと、立ち下がりエッジをカウントするカウント部54と、を有する。
【0058】
また、処理部50は、上記した各部51〜54の出力信号に基づいて、所定の演算処理を行うCPU55と、その演算処理に必要な値が記憶されたレジスタ56〜58と、を有する。パターンレジスタ56には、回転体10が正常に回転している場合に、第1除算部51若しくは第2除算部52から出力されることが期待される期待値に所定の誤差が付加された値が記憶されている。すなわち、パターンレジスタ56には、3に所定の誤差が付加された値と、1/3に所定の誤差が付加された値とが記憶されている。運動レジスタ57には、回転体10が正常に回転している場合に、第1除算部51若しくは第2除算部52から出力される期待値に所定の誤差が付加された値が記憶されている。波形レジスタ58には、回転体10が正常に回転している場合に、第3除算部53から出力される期待値に所定の誤差が付加された値が記憶されている。
【0059】
なお、第1除算部51、第2除算部52、CPU55、及びパターンレジスタ56によって、特許請求の範囲に記載のパターン判定部が構成され、第1除算部51、第2除算部52、CPU55、及び運動レジスタ57によって、特許請求の範囲に記載の運動状態判定部が構成される。また、第3除算部53、CPU55、及び波形レジスタ58によって、特許請求の範囲に記載の波形判定部が構成される。
【0060】
詳細に言えば、第1除算部51と第2除算部52とによって、特許請求の範囲に記載の第1〜4除算部のいずれかが構成される。第3除算部53が、特許請求の範囲に記載の第5除算部に相当する。CPU55が、特許請求の範囲に記載の第1〜5比較部、及び、回転数処理部の機能を担う。また、カウント部54が、特許請求の範囲に記載のカウント部に相当する。
【0061】
回転体10が運動し、それに応じたパルス信号がセンサ部30から上記した各部51〜54に入力されると、各部51〜54は以下に示す演算を行う。
【0062】
第1除算部51は、パルス信号に含まれる、任意のパルスである第1パルスのLoパルス幅によって、第1パルスの次に出力される第2パルスのLoパルス幅を除算した値と、第2パルスの次に出力される第3パルスのLoパルス幅によって、第2パルスのLoパルス幅を除算した値と、を順次算出する。これに対して、第2除算部52は、パルス信号に含まれる、第1パルスのHiパルス幅によって、第2パルスのHiパルス幅を除算した値と、第3パルスのHiパルス幅によって、第2パルスのHiパルス幅を除算した値と、を順次算出する。また、第3除算部53は、パルス信号に含まれる、任意のパルスのHiパルス幅をLoパルス幅によって除算した値を順次算出する。カウント部54は、パルス信号に含まれる、各パルスの立ち上がりエッジと、立ち下がりエッジとを順次カウントする。
【0063】
上記したように、回転体10が時計周りに回転している場合、センサ部30は、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力する。したがって、第1除算部51によって算出されることが期待される期待値は、3、若しくは、1/3となり、第2除算部52によって算出されることが期待される期待値は、1となる。このように、回転体10が時計周りに正常に回転している場合、第1除算部51から、歯部11の形成パターンに対応した値が順次出力される。
【0064】
これに対して、回転体10が反時計周りに回転している場合、センサ部30は、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。したがって、第1除算部51によって算出されることが期待される期待値は、1となり、第2除算部52によって算出されることが期待される期待値は、3、若しくは、1/3となる。このように、回転体10が反時計周りに正常に回転している場合、第2除算部52から、歯部11の形成パターンに対応した値が順次出力される。
【0065】
次に、CPU55の演算処理について説明する。CPU55は、第1及び第2除算部51,52から電気信号が入力されると、先ず、その値が、運動レジスタ57に記憶された値に近く、その誤差範囲内に収まっているか否かを判定する。その値が、誤差範囲内に収まっていない場合、CPU55は、回転体10の角速度が一定ではないと判断し、第1及び第2除算部51,52から出力された値に対応する、センサ部30から出力された信号を捨てる。これにより、回転体10が正常に回転しているにも関わらず、回転体10の角速度が一定ではないために、回転体10が正常に回転していない、という誤った判断が下されることが抑制される。
【0066】
また、CPU55は、第3除算部53から電気信号が入力されると、その値が、波形レジスタ58に記憶された値に近く、その誤差範囲内に収まっているか否かを判定する。その値が、誤差範囲内に収まっていない場合、CPU55は、波形が乱れていると判断し、第3除算部53から出力された値に対応する、センサ部30から出力された信号を捨てる。これにより、回転体10が正常に回転しているにも関わらず、パルス信号の波形が乱れているために、回転体10が正常に回転していない、という誤った判断が下されることが抑制される。
【0067】
次に、CPU55は、運動レジスタ57と波形レジスタ58とに基づいて選出された、センサ部30から出力される信号に基づく、第1及び第2除算部51,52の出力信号の値が、1よりも大きいか、小さいかを判定する。これにより、CPU55は、歯部11の形成パターンに対応した値を選出する。次いで、CPU55は、1よりも大きい、若しくは、1よりも小さい値を出力する第1除算部51若しくは第2除算部52の出力信号に基づいて、回転体10が正常に回転しているか否かを判定する。
【0068】
CPU55は、第1除算部51若しくは第2除算部52から出力された値の1つが、1よりも大きい場合、パターンレジスタ56から3に所定の誤差が付加された値を読み込み、1よりも大きい値が、読み込んだ値の範囲内に収まっているか否かを判定する。また、CPU55は、第1除算部51若しくは第2除算部52から出力された値の1つが、1よりも小さい場合、パターンレジスタ56から1/3に所定の誤差が付加された値を読み込み、1よりも小さい値が、読み込んだ値の範囲内に収まっているか否かを判定する。上記した値が、読み込んだ値の範囲内に収まっている場合、CPU55は、回転体10が正常に回転していると判断する。
【0069】
また、CPU55は、第1及び第2除算部51,52いずれから、1が順次入力されているか否かを判定する。上記したように、回転体10が時計回りに回転している場合に、第2除算部52から1が順次出力され、回転体10が反時計回りに回転している場合に、第1除算部51から1が順次出力される。したがって、CPU55は、第2除算部52から1が順次出力されている場合に、回転体10が時計回りに回転していると判断し、第1除算部51から1が順次出力されている場合に、回転体10が反時計回りに回転していると判断する。
【0070】
若しくは、CPU55は、各パルスのHiパルス幅が、一定であるか否か、若しくは、各パルスのLoパルス幅が一定であるか否かに基づいて、回転体10の回転方向を判断する。上記したように、回転体10が時計回りに回転している場合、Hiパルス幅は一定不変であり、回転体10が反時計回りに回転している場合、Loパルス幅は一定不変である。したがって、CPU55は、Hiパルス幅が一定の場合に、回転体10が時計回りに回転していると判断し、Loパルス幅が一定の場合に、回転体10が反時計回りに回転していると判断する。
【0071】
また、CPU55は、運動レジスタ57と波形レジスタ58とに基づいて選出された、センサ部30から出力される信号に基づく、カウント部54の出力信号が、回転体10の外周に形成された歯部11の数の2倍に達したか否かを判定する。2倍に達した場合、CPU55は、回転体10が1回転したと判断する。回転体10がセンサ部30に対して1回転した場合、センサ部30に対して1つの歯部11が通過する毎に、1つのパルスがセンサ部30から出力される。カウント部54は、そのパルスの立ち上がりと立ち下がりとをカウントするので、回転体10がセンサ部30に対して1回転した場合、カウント部54は、回転体10の外周に形成された歯部11の数の2倍をカウントする。なお、本実施形態では、カウント部54が、パルスの立ち上がりと立ち下がりとをカウントする例を示したが、カウント部54が、パルスの立ち上がり及び立ち下がりのいずれか一方をカウントするようにしても良い。この場合、CPU55は、カウント部54の出力信号が、回転体10の外周に形成された歯部11の数に達したか否かを判定し、歯部11の数に達した場合、CPU55は、回転体10が1回転したと判断する。
【0072】
次に、本実施形態に係る回転状態検出機構100の作用効果を説明する。上記したように、回転体10の外周に、第1の間隔Aで隣接配置された2つの歯部11から成る第1歯対13が、第3の間隔Cを介して、交互に形成されている。これにより、センサ部30から、上記した歯部11の形成パターンに対応したパルス信号が出力される。すなわち、センサ部30は、回転体10が時計周りに回転している場合、電圧レベルが、τ,σ,τ,3σ,τ,σ,τの出力時間で、順次反転するパルス信号を出力し、回転体10が反時計周りに回転している場合、電圧レベルが、σ,τ,σ,3τ,σ,τ,σの出力時間で、順次反転するパルス信号を出力する。このパルス信号のパターンは、歯部11の形成パターンに対応する。したがって、本実施形態で示したように、センサ部30から出力されるパルス信号に含まれる複数のパルスのLo(Hi)パルス幅の比を算出し、その値がパターンレジスタ56に記憶された値の範囲内に収まっているか否かを判定することで、回転体10が正常に回転しているか否かを判定することができる。
【0073】
ところで、回転体の一部に欠落部を設けることで、欠落部において被検出歯の間隔が他の間隔とは異なる構成の場合、回転体が正常に回転しているか否かを確実に判定するには、センサ部に対する欠落部の位置が定まらないので、最長で、回転体が1回転しなければならない。これに対して、本実施形態に示す回転状態検出機構100では、複数の第1歯対13と第2歯対14とが、回転体10の外周に交互に形成された構成となっている。したがって、上記構成の場合、回転体10が1回転する前に、回転体10が正常に回転しているか否かを確実に判定することができる。以上により、回転状態検出機構100は、回転体の外周の一部に欠落部が設けられた構成と比べて、回転体10が正常に回転しているか否かを判定する時間が短縮された構成となっている。
【0074】
以上、本発明の好ましい実施形態について説明したが、本発明は上記した実施形態になんら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することが可能である。
【0075】
第1実施形態では、複数のパルスのLo(Hi)パルス幅の比に基づいて、回転体10が正常に回転しているか否かを判定した。しかしながら、各パルスのパルス周期に基づいて、回転体10が正常に回転しているか否かを判定しても良い。第1実施形態で示したように、回転体10が正常に回転している場合、回転体10の回転方向に依らず、センサ部30から出力されるパルス信号の各パルスのパルス周期は、T,2T,T,2T,T,2T…と順次変動する。したがって、例えば、第4除算部(図示略)にて、第1パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、第3パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、を順次算出する。そして、第2のパターンレジスタ(図示略)に記憶された、2に所定の誤差が付加された値、若しくは、1/2に所定の誤差が付加された値をCPU55が読み込む。その次に、CPU55が、第4除算部から出力された値が、第2のパターンレジスタから読み込んだ値の範囲内に収まっているか否かを判定する。以上により、回転体10が正常に回転しているか否かを判定することができる。
【0076】
また、第1実施形態では、第1の間隔Aと第2の間隔Bとが同一の場合を説明した。しかしながら、例えば図7、及び図8の(a)に示すように、第1の間隔Aと第2の間隔Bとが異なっても良い。図7に示す回転体10では、第2の間隔Bが、第1の間隔Aよりも3倍長く、第3の間隔Cが、第1の間隔Aよりも5倍長くなっている。回転体10が時計回りに第1歯対13から第2歯対14まで回転した場合、センサ部30からは、電圧レベルが、τ,σ,τ,5σ,τ,3σ,τの出力時間で、順次反転するパルス信号が出力される。この場合、第1除算部51からは、5,5/3,3/5が出力され、第2除算部52からは、1が出力される。このように、回転体10が時計回りに回転している場合、第1除算部51から、歯部11の形成パターンに対応した値が順次出力される。したがって、CPU55は、第1除算部51の出力信号に基づいて、回転体10が正常に回転しているか否かを判定することができる。これに対して、回転体10が反時計回りに第1歯対13から第2歯対14まで回転した場合、センサ部30からは、電圧レベルが、σ,τ,σ,5τ,σ,3τ,σの出力時間で、順次反転するパルス信号が出力される。したがって、第1除算部51からは、1が出力され、第2除算部52からは、5,5/3,3/5が出力される。このように、回転体10が反時計回りに回転している場合、第2除算部52から、歯部11の形成パターンに対応した値が順次出力される。したがって、CPU55は、第2除算部52の出力信号に基づいて、回転体10が正常に回転しているか否かを判定することができる。
【0077】
この変形例の場合、CPU55は、パターンレジスタ56に記憶された、5に所定の誤差が付加された値を読み込む。そして、CPU55は、第1除算部51若しくは第2除算部52から出力された、1及び5/3よりも十分に大きい値である5が、パターンレジスタ56から読み込んだ値の範囲内に収まっているか否かを判定することで、回転体10が正常に回転しているか否かを判定する。上記した値が、読み込んだ値の範囲内に収まっている場合、CPU55は、回転体10が正常に回転していると判断する。図7は、回転体の変形例を説明するための正面図である。図8は、図7に示すセンサ部から出力されるパルス信号と歯部との対応関係を示す図であり、(a)は、歯部の形成パターン、(b)は、回転体が時計回りに回転している状態で出力されるパルス信号、(c)は、回転体が反時計回りに回転している状態で出力されるパルス信号を示す。
【0078】
なお、図7及び図8に示した変形例においても、パルス周期に基づいて、回転体10が正常に回転しているか否かを判定しても良い。この変形例の場合、各パルスのパルス周期は、T,3T,2T,3T,T…と順次変動する。したがって、例えば、先の変形例で示した第4除算部にて、第1パルスのパルス幅によって、第2パルスのパルス周期を除算した値と、第3パルスのパルス周期によって、第2パルスのパルス周期を除算した値と、を順次算出する。そして、先の変形例で示した第2のパターンレジスタに記憶された、3に所定の誤差が付加された値をCPU55が読み込む。最後に、CPU55が、第4除算部から出力された、1及び3/2よりも十分に大きい値である3が、読み込んだ値の範囲内に収まっているか否かを判定する。以上により、回転体10が正常に回転しているか否かを判定することができる。
【符号の説明】
【0079】
10・・・回転体
11・・・歯部
12・・・凹部
13・・・第1歯対
14・・・第2歯対
30・・・センサ部
50・・・処理部
100・・・回転状態検出機構
【特許請求の範囲】
【請求項1】
外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構であって、
複数の前記歯部はそれぞれ同一形状であり、
前記回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、
前記第1歯対を成す1つの歯部と、それと隣接する前記第2歯対を成す1つの歯部との間隔が、前記第1の間隔及び前記第2の間隔とは異なる第3の間隔となっており、
前記処理部は、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することで、前記回転体が正常に回転しているか否かを判定するパターン判定部を有することを特徴とする回転状態検出機構。
【請求項2】
前記センサ部は、
前記回転体が一方向に回転している状態で、前記センサ部に対して前記歯部が通過する毎にパルスを出力し、前記回転体が他方向に回転している状態で、前記センサ部に対して2つの前記歯部の間を通過する毎にパルスを出力する構成となっており、
前記パターン判定部は、
前記回転体が一方向に回転している状態で、前記センサ部の出力信号における、任意のパルスである、第1パルスの立ち下がり時から、第1パルスの次に出力される第2パルスの立ち上がり時までの第1時間と、第2パルスの立ち下がり時から、第2パルスの次に出力される第3パルスの立ち上がり時までの第2時間とを比較した値、及び、第2時間と、第3パルスの立ち下がり時から、第3パルスの次に出力される第4パルスの立ち上がり時までの第3時間とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定し、
前記回転体が他方向に回転している状態で、第1パルスの立ち上がり時から、第1パルスの立ち下がり時までの第1パルス幅と、第2パルスの立ち上がり時から、第2パルスの立ち下がり時までの第2パルス幅とを比較した値、及び、第2パルス幅と、第3パルスの立ち上がり時から、第3パルスの立ち下がり時までの第3パルス幅とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定することを特徴とする請求項1に記載の回転状態検出機構。
【請求項3】
前記パターン判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対が成す第1の間隔を回転するまでに、前記センサ部が出力する信号の第1出力時間と、前記第1歯対と前記第2歯対とが成す第3の間隔を回転するまでに、前記センサ部が出力する信号の第2出力時間との比、及び、前記第2歯対が成す第2の間隔を回転するまでに、前記センサ部が出力する信号の第3出力時間と、前記第2出力時間との比の少なくとも一方を出力する第1除算部と、
該第1除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第1比較部と、を有することを特徴とする請求項2に記載の回転状態検出機構。
【請求項4】
前記パターン判定部は、
前記センサ部の出力信号における、任意のパルスである、第1パルスのパルス周期と、第1パルスの次に出力される第2パルスのパルス周期とを比較した値、及び、第2パルスのパルス周期と、第2パルスの次に出力される第3パルスのパルス周期とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定することを特徴とする請求項1に記載の回転状態検出機構。
【請求項5】
前記パターン判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対を成す一方の歯部と、前記第1歯対が成す第1の間隔とを回転するまでに、前記センサ部が出力する信号の第4出力時間と、前記第1歯対を成す他方の歯部と、前記第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、前記センサ部が出力する信号の第5出力時間との比、及び、前記第2歯対を成す一方の歯部と、前記第2歯対が成す第2の間隔とを回転するまでに前記センサ部が出力する信号の第6出力時間と、前記第5出力時間との比の少なくとも一方を出力する第2除算部と、
該第2除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第2比較部と、を有することを特徴とする請求項4に記載の回転状態検出機構。
【請求項6】
前記処理部は、前記回転体の角速度が一定か否かを判定する運動状態判定部を有し、
前記パターン判定部は、前記運動状態判定部によって前記回転体の角速度が一定であると判定された場合に、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することを特徴とする請求項1〜5いずれか1項に記載の回転状態検出機構。
【請求項7】
前記運動状態判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対が成す第1の間隔を回転するまでに、前記センサ部が出力する信号の第1出力時間と、前記第1歯対と前記第2歯対とが成す第3の間隔を回転するまでに、前記センサ部が出力する信号の第2出力時間との比、及び、前記第2歯対が成す第2の間隔を回転するまでに、前記センサ部が出力する信号の第3出力時間と、前記第2出力時間との比の少なくとも一方を出力する第3除算部と、
該第3除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第3比較部と、を有することを特徴とする請求項6に記載の回転状態検出機構。
【請求項8】
前記運動状態判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対を成す一方の歯部と、前記第1歯対が成す第1の間隔とを回転するまでに、前記センサ部が出力する信号の第4出力時間と、前記第1歯対を成す他方の歯部と、前記第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、前記センサ部が出力する信号の第5出力時間との比、及び、前記第2歯対を成す一方の歯部と、前記第2歯対が成す第2の間隔とを回転するまでに前記センサ部が出力する信号の第6出力時間と、前記第5出力時間との比の少なくとも一方を出力する第4除算部と、
該第4除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第4比較部と、を有することを特徴とする請求項6に記載の回転状態検出機構。
【請求項9】
前記処理部は、前記センサ部から出力されるパルス信号の波形が正常か否かを判定する波形判定部を有し、
前記パターン判定部は、前記波形判定部によってパルス信号の波形が正常であると判定された場合に、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することを特徴とする請求項1〜8いずれか1項に記載の回転状態検出機構。
【請求項10】
前記波形判定部は、
前記センサ部の出力信号における、任意のパルスのパルス幅と、そのパルスの立ち下がり時から、そのパルスの次に出力されるパルスの立ち上がり時までの時間との比を出力する第5除算部と、
該第5除算部によって出力された値が所定の範囲内に収まっているか否かを判定する第5比較部と、を有することを特徴とする請求項9に記載の回転状態検出機構。
【請求項11】
前記第1の間隔と、前記第2の間隔は同一であることを特徴とする請求項1〜10いずれか1項に記載の回転状態検出機構。
【請求項12】
前記第1の間隔と、前記第2の間隔は異なることを特徴とする請求項1〜10いずれか1項に記載の回転状態検出機構。
【請求項13】
前記第3の間隔は、前記第1の間隔及び前記第2の間隔よりも長いことを特徴とする請求項1〜12いずれか1項に記載の回転状態検出機構。
【請求項14】
前記処理部は、前記センサ部から出力されるパルスの立ち上がり数と、立ち下がり数との少なくとも一方を数えるカウント部と、前記カウント部の出力信号に基づいて、前記回転体の回転数を算出する回転数処理部と、を有することを特徴とする請求項1〜13いずれか1項に記載の回転状態検出機構。
【請求項15】
前記センサ部は、磁束を前記回転体に印加するように配置された磁石と、前記回転体の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子と、該磁電変換素子の出力信号をアナログ信号からディジタル信号に変換するA−D変換部と、を有することを特徴とする請求項1〜14いずれか1項に記載の回転状態検出機構。
【請求項1】
外周に複数の歯部が所定の間隔で形成された回転体と、該回転体の回転に伴う磁束の変化に応じたパルス信号を出力するセンサ部と、該センサ部の出力信号を処理する処理部と、を備える回転状態検出機構であって、
複数の前記歯部はそれぞれ同一形状であり、
前記回転体の外周には、歯部の間隔が第1の間隔で隣接配置された2つの歯部から成る第1歯対と、歯部の間隔が第2の間隔で隣接配置された2つの歯部から成る第2歯対とが交互に複数形成され、
前記第1歯対を成す1つの歯部と、それと隣接する前記第2歯対を成す1つの歯部との間隔が、前記第1の間隔及び前記第2の間隔とは異なる第3の間隔となっており、
前記処理部は、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することで、前記回転体が正常に回転しているか否かを判定するパターン判定部を有することを特徴とする回転状態検出機構。
【請求項2】
前記センサ部は、
前記回転体が一方向に回転している状態で、前記センサ部に対して前記歯部が通過する毎にパルスを出力し、前記回転体が他方向に回転している状態で、前記センサ部に対して2つの前記歯部の間を通過する毎にパルスを出力する構成となっており、
前記パターン判定部は、
前記回転体が一方向に回転している状態で、前記センサ部の出力信号における、任意のパルスである、第1パルスの立ち下がり時から、第1パルスの次に出力される第2パルスの立ち上がり時までの第1時間と、第2パルスの立ち下がり時から、第2パルスの次に出力される第3パルスの立ち上がり時までの第2時間とを比較した値、及び、第2時間と、第3パルスの立ち下がり時から、第3パルスの次に出力される第4パルスの立ち上がり時までの第3時間とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定し、
前記回転体が他方向に回転している状態で、第1パルスの立ち上がり時から、第1パルスの立ち下がり時までの第1パルス幅と、第2パルスの立ち上がり時から、第2パルスの立ち下がり時までの第2パルス幅とを比較した値、及び、第2パルス幅と、第3パルスの立ち上がり時から、第3パルスの立ち下がり時までの第3パルス幅とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定することを特徴とする請求項1に記載の回転状態検出機構。
【請求項3】
前記パターン判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対が成す第1の間隔を回転するまでに、前記センサ部が出力する信号の第1出力時間と、前記第1歯対と前記第2歯対とが成す第3の間隔を回転するまでに、前記センサ部が出力する信号の第2出力時間との比、及び、前記第2歯対が成す第2の間隔を回転するまでに、前記センサ部が出力する信号の第3出力時間と、前記第2出力時間との比の少なくとも一方を出力する第1除算部と、
該第1除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第1比較部と、を有することを特徴とする請求項2に記載の回転状態検出機構。
【請求項4】
前記パターン判定部は、
前記センサ部の出力信号における、任意のパルスである、第1パルスのパルス周期と、第1パルスの次に出力される第2パルスのパルス周期とを比較した値、及び、第2パルスのパルス周期と、第2パルスの次に出力される第3パルスのパルス周期とを比較した値の少なくとも一方に基づいて、前記回転体が正常に回転しているか否かを判定することを特徴とする請求項1に記載の回転状態検出機構。
【請求項5】
前記パターン判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対を成す一方の歯部と、前記第1歯対が成す第1の間隔とを回転するまでに、前記センサ部が出力する信号の第4出力時間と、前記第1歯対を成す他方の歯部と、前記第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、前記センサ部が出力する信号の第5出力時間との比、及び、前記第2歯対を成す一方の歯部と、前記第2歯対が成す第2の間隔とを回転するまでに前記センサ部が出力する信号の第6出力時間と、前記第5出力時間との比の少なくとも一方を出力する第2除算部と、
該第2除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第2比較部と、を有することを特徴とする請求項4に記載の回転状態検出機構。
【請求項6】
前記処理部は、前記回転体の角速度が一定か否かを判定する運動状態判定部を有し、
前記パターン判定部は、前記運動状態判定部によって前記回転体の角速度が一定であると判定された場合に、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することを特徴とする請求項1〜5いずれか1項に記載の回転状態検出機構。
【請求項7】
前記運動状態判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対が成す第1の間隔を回転するまでに、前記センサ部が出力する信号の第1出力時間と、前記第1歯対と前記第2歯対とが成す第3の間隔を回転するまでに、前記センサ部が出力する信号の第2出力時間との比、及び、前記第2歯対が成す第2の間隔を回転するまでに、前記センサ部が出力する信号の第3出力時間と、前記第2出力時間との比の少なくとも一方を出力する第3除算部と、
該第3除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第3比較部と、を有することを特徴とする請求項6に記載の回転状態検出機構。
【請求項8】
前記運動状態判定部は、
前記回転体が、前記センサ部に対して、前記第1歯対を成す一方の歯部と、前記第1歯対が成す第1の間隔とを回転するまでに、前記センサ部が出力する信号の第4出力時間と、前記第1歯対を成す他方の歯部と、前記第1歯対を成す他方の歯部と第2歯対を成す一方の歯部とが成す第3の間隔とを回転するまでに、前記センサ部が出力する信号の第5出力時間との比、及び、前記第2歯対を成す一方の歯部と、前記第2歯対が成す第2の間隔とを回転するまでに前記センサ部が出力する信号の第6出力時間と、前記第5出力時間との比の少なくとも一方を出力する第4除算部と、
該第4除算部によって算出された値が所定の範囲内に収まっているか否かを判定する第4比較部と、を有することを特徴とする請求項6に記載の回転状態検出機構。
【請求項9】
前記処理部は、前記センサ部から出力されるパルス信号の波形が正常か否かを判定する波形判定部を有し、
前記パターン判定部は、前記波形判定部によってパルス信号の波形が正常であると判定された場合に、前記センサ部から出力されるパルス信号のパターンが、前記歯部の形成パターンに対応しているか否かを判定することを特徴とする請求項1〜8いずれか1項に記載の回転状態検出機構。
【請求項10】
前記波形判定部は、
前記センサ部の出力信号における、任意のパルスのパルス幅と、そのパルスの立ち下がり時から、そのパルスの次に出力されるパルスの立ち上がり時までの時間との比を出力する第5除算部と、
該第5除算部によって出力された値が所定の範囲内に収まっているか否かを判定する第5比較部と、を有することを特徴とする請求項9に記載の回転状態検出機構。
【請求項11】
前記第1の間隔と、前記第2の間隔は同一であることを特徴とする請求項1〜10いずれか1項に記載の回転状態検出機構。
【請求項12】
前記第1の間隔と、前記第2の間隔は異なることを特徴とする請求項1〜10いずれか1項に記載の回転状態検出機構。
【請求項13】
前記第3の間隔は、前記第1の間隔及び前記第2の間隔よりも長いことを特徴とする請求項1〜12いずれか1項に記載の回転状態検出機構。
【請求項14】
前記処理部は、前記センサ部から出力されるパルスの立ち上がり数と、立ち下がり数との少なくとも一方を数えるカウント部と、前記カウント部の出力信号に基づいて、前記回転体の回転数を算出する回転数処理部と、を有することを特徴とする請求項1〜13いずれか1項に記載の回転状態検出機構。
【請求項15】
前記センサ部は、磁束を前記回転体に印加するように配置された磁石と、前記回転体の回転に伴う磁束の変化に応じた電気信号を出力する磁電変換素子と、該磁電変換素子の出力信号をアナログ信号からディジタル信号に変換するA−D変換部と、を有することを特徴とする請求項1〜14いずれか1項に記載の回転状態検出機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−127975(P2011−127975A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−285625(P2009−285625)
【出願日】平成21年12月16日(2009.12.16)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月16日(2009.12.16)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]