
回転翼の非接触翼振動計測方法
【課題】少ない非接触センサで同等の情報を得ることができ、かつセンサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる回転翼の非接触翼振動計測方法を提供する。
【解決手段】ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
【解決手段】ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転翼を有するターボ機械の非接触翼振動計測方法に関する。
【背景技術】
【0002】
ガスタービン、航空エンジン、等の回転翼を有するターボ機械では、回転翼が振動して性能や寿命が低下することがある。そこで、回転翼の翼振動を非接触で計測する手段(以下、「非接触翼振動計測手段」と呼ぶ)が種々提案されている。
【0003】
従来の非接触翼振動計測手段の基本原理は、回転翼を囲むケーシングに回転翼の通過を検出する非接触センサを取り付けて、回転翼の振動時と非振動時の通過時刻(TOA:Time Of Arrival)のずれから振動振幅を算出するものである。
【0004】
また、直接計測された時刻情報から、振幅と周波数へ分離・換算することが計測原理上必要であり、その従来技術として、非接触センサを1台又は2台用いる「1自由度フィット法」や非接触センサを4台用いる「波形フィット法」が、例えば特許文献1,2や非特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−165089号公報、「非接触翼振動計測装置」
【特許文献2】特開2002−98584号公報、「翼振動計測方法及びこれを用いた翼振動監視システム」
【非特許文献】
【0006】
【非特許文献1】金子他、「改良少数点法を利用した可搬型非接触翼振動計測システムの開発」、日本機械学会、Dynamics and Design Conference 2001,OS−201
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した従来の1自由度フィット法では、非接触センサの必要数は、1台又は2台で足りるが、得られる情報が振幅のみであり、周波数と位相は求められない。また、従来の波形フィット法では、振幅、周波数及び位相が得られるが、4台以上の非接触センサを必要とする。
さらに、従来の波形フィット法では、検出周波数上限がセンサ間角度で制限される。センサ間角度を小さくするにはセンサピッチを小さくする必要があるが、センサ径は有限であるため、同じセンサ角度でもセンサピッチが小さくなる小径ターボ機械の計測に不向きであるなどの問題があった。
【0008】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、少ない非接触センサで同等の情報を得ることができ、かつセンサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる回転翼の非接触翼振動計測方法を提供することにある。
【課題を解決するための手段】
【0009】
本発明によれば、軸心を中心に回転し周方向に等間隔に配置された複数の回転翼と、該回転翼の半径方向外方端から間隔を隔てて回転翼を囲むケーシングとを有するターボ機械の非接触翼振動計測方法であって、
前記ケーシングに取り付けられた非接触センサで前記回転翼を非接触で検出し、
該非接触センサによる回転翼の検出信号の立ち上りと立ち下りの時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと前記立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する、ことを特徴とするターボ機械の非接触翼振動計測方法が提供される。
【0010】
本発明の好ましい第1実施例によれば、単一の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する。
【0011】
また本発明の好ましい第2実施例によれば、3台の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する。
【発明の効果】
【0012】
上記本発明の方法によれば、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻の両方を有効に利用し、かつその時刻差から速度情報を求めるため、少ない非接触センサで同等の情報を得ることができる。
【0013】
また、各非接触センサで、トリガイン信号とトリガアウト信号の両方を有効に利用できるため、センサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる。
【図面の簡単な説明】
【0014】
【図1】従来の非接触翼振動計測装置の構成図である。
【図2】1点法において、共振点との回転数比βを1のまわりで変化させた際のT1N3の挙動を示す図である。
【図3】本発明の第1実施例による非接触翼振動計測装置の構成図である。
【図4】本発明による非接触センサの検出信号の説明図である。
【図5】本発明において、共振点との回転数比βを1のまわりで変化させた際のT1N−T2Nの挙動を示す図である。
【図6】本発明の第2実施例による非接触翼振動計測装置の構成図である。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0016】
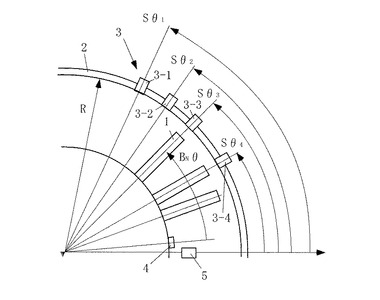
図1は、従来の非接触翼振動計測装置の構成図である。この図において、1は回転翼、2はケーシング、3(3−1,3−2,3−3,3−4)は非接触センサ、4はキー溝、5はキー溝センサである。すなわち、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ3を取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1,Sθ2,Sθ3,Sθ4は、この例では4台の非接触センサ3(3−1,3−2,3−3,3−4)のキー溝センサ5からのそれぞれの取付角度である。また、BNθは、キー溝4からN番目の回転翼1の取付角度、Rは、ケーシング2の半径である。
また、以下の説明において、T1N,T2N,T3N,T4Nは、N番目の回転翼1が4台の非接触センサ3(3−1,3−2,3−3,3−4)をそれぞれ通過する時刻である。
【0017】
以下、非接触センサを1台用いる従来の「1自由度フィット法」を「1点法」と呼ぶ。
1点法は、図1の非接触センサ3のうち1つ(ここでは非接触センサ3−1のみ)を用いて、得られた時刻情報から翼振動振幅を得る方法である。1点法の原理によれば、非接触センサ3−1で計測されるN番目の回転翼1の翼通過時刻T1Nは、数1の式(1)のように得られる。
【0018】
ここで、Trはロータ回転周期、rはロータ回転回数(サンプリング回数)、fb1〜fbxは翼振動数(回転次数比nとロータ回転数Ωとの積(n・Ω))、uは回転翼1の周速、Ωはロータ回転数((1/Tr )、a1(fb1)〜aX(fbx)は翼振動振幅(翼振動数fb1〜fbxの関数)、φ1(fb1)〜φX(fbx)は翼振動位相(翼振動数fb1〜fbxの関数)、n1〜nxは回転次数比(fb/Ω)である。
【0019】
式(1)の第1項,第2項は振動変位が生じていないときの時刻,第3項以降が翼振動にともなって生じる時刻ずれの項である。
式(1)において、ロータ回転周期Tr、ロータ回転回数r、キー溝4から1番目の回転翼1の取付角度B1θ、および非接触センサ3−1のキー溝センサ5からの取付角度Sθ1は、既知なので第1項,第2項は消去できる。
【0020】
簡単のため、翼振動に含まれる周波数成分が1成分のみ、つまり翼は、式(2)で振動していると考えて3項のみを考え、それをT1N3と置けば、式(3)となる。
さらに、翼振動a1を固有振動数ω、減衰比ζの1自由度系と仮定すれば、a1(fb1),φ1(fb1)は固有振動数ωと励振のfb1の比βを用いて、式(4)、式(5)のように表わされる。
【0021】
【数1】

【0022】
図2は、共振点との回転数比βを1のまわりで変化させた際のT1N3の挙動を示す図である。
この図において、センサ位置に関わらず、最大最小の巾ΔTOAはamax/uとして現れることが知られている。ここでロータ回転周期Trと回転翼1の周速uは既知なので、この性質を用いれば、回転数を連続的に上下させて得られた図2のような曲線から、翼の最大振動振幅amaxを得ることができる。
ただしこの過程で周波数は未定のままである。
【0023】
次に、非接触センサを2台用いる従来の「1自由度フィット法」(以下「2点法」と呼ぶ)を説明する。
2点法は、図1の非接触センサ3のうち2つ(ここでは非接触センサ3−1,3−2)を用い、1点法の式(1)を2つの非接触センサ3(たとえば非接触センサ3−1,3−2)の間で引いて、数2の式(6)を得る。
さらにこれに三角関数の公式(7)を用いれば、式(8)が得られる。
その後、振動成分について、1点法と同様の方法で振動振幅を求める方法である。
【0024】
【数2】
【0025】
しかし、2点法では実際の振動振幅に対して、2sin(n1(Sθ1−Sθ2)/2)倍された値が計測されるため,実振幅を求めるためには計測値の補正が必要である。言い換えれば,何らかの方法で翼振動数n1の推定ができなければ,正しい振幅を求めることはできない。
【0026】
次に、非接触センサを4台用いる従来の「波形フィット法」(以下「4点法」と呼ぶ)を説明する。
4点法は、図1の4台の非接触センサ3(3−1,3−2,3−3,3−4)をすべて用いる。2点法の式(8)を4台の非接触センサに用いることにより、数3の式(9)〜式(11)が得られる。
【0027】
【数3】
【0028】
回転同期振動の場合には、各センサで計測される振動データは収録回数rに無関係な一定値となるので、3つの未知数(振幅a1、周波数fb1または次数n1、および位相φ1)に対して3本の連立方程式が成立する。
振動項のみを残してこの関数形を満たすように振幅a1、翼振動数n1、位相φ1を求める。
1点法で得られるのは共振ピーク位置での振幅最大値のみであるが、この方法によれば、周波数、振幅、位相をピーク位置に限定されず、その周辺の任意の位置で連続的に知ることができる。
【0029】
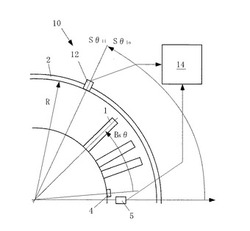
図3は、本発明の第1実施例による非接触翼振動計測装置の構成図である。
この図において、1は回転翼、2はケーシング、12は非接触センサ、4はキー溝、5はキー溝センサである。すなわち、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ12を1台取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1i,Sθ1oは、この例では1台の非接触センサ12のキー溝センサ5からの立ち上りと立ち下りに対応する取付角度である。また、BNθは、キー溝4からN番目の回転翼1の取付角度、Rはケーシング2の半径である。
【0030】
接触翼振動計測装置10は、軸心を中心に回転し周方向に等間隔に配置された複数の回転翼1と、回転翼1の半径方向外方端から間隔を隔てて回転翼1を囲むケーシング2とを有するターボ機械の非接触翼振動計測装置である。
【0031】
図3において、接触翼振動計測装置10は、非接触センサ12と振動計測装置14とを備える。
非接触センサ12は、ケーシング2に取り付けられ回転翼1を非接触で検出する。
振動計測装置14は、非接触センサ12による回転翼1の検出信号の立ち上りと立ち下りの時刻から回転翼1の振動を計測し、回転翼1の振動時と非振動時の通過時刻のずれと検出信号の立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
【0032】
上述した装置を用い、本発明の非接触翼振動計測方法では、
(A)ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、
(B)非接触センサ12による回転翼1の検出信号の立ち上りと立ち下りの時刻から回転翼1の振動を計測し、回転翼1の振動時と非振動時の通過時刻のずれと検出信号の立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
また、この例では、単一の非接触センサ12を用い、回転翼1の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する。
【0033】
以下、本発明の方法を詳述する。
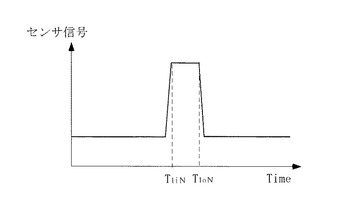
図4は、本発明による非接触センサの検出信号の説明図である。この図において、横軸は経過時間、縦軸はセンサ信号である。
この図において、T1iN,T1oNは、N番目の回転翼1が1台の非接触センサ12を通過する際の検出信号の立ち上りと立ち下りの時刻である。すなわち、たとえば、同一の非接触センサ12で、トリガイン時刻T1iNとトリガアウト時刻T1oNが得られたとする。
この場合、トリガアウト時刻−トリガイン時刻は、2点法の原理を用いて、数4の式(12)となる。
【0034】
【数4】
【0035】
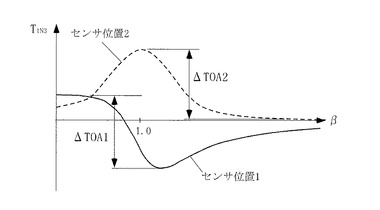
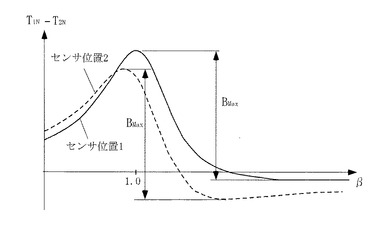
図5は、本発明において、共振点との回転数比βを1のまわりで変化させた際のT1N−T2Nの挙動を示す図である。
1点法と同様に、翼を固有振動数ω、減衰比ζの1自由度系と仮定して振幅a1と位相φ1を有振動数ωと励振のfb1の比βの関数としたうえでβ=1のまわりで変化させた際のT1N−T2Nの振動成分(右辺第2項)の挙動は図5のようになる。
【0036】
1点法と同様に、センサ位置に関わらず、最大最小の巾は式(13)の一定値として現れることが分かる。
ここでR,Sθ1,Sθ2は既知で、a1は1点法により得られるから、周波数n1も得られる。この性質を用いれば、回転数を連続的に上下させて得られた図5のような曲線から、1本のセンサで翼の最大振動振幅amaxと周波数n1を同時に得ることができる。
【0037】
すなわち、本発明の第1実施例では、回転翼1が共振周波数を通過するときに1台の非接触センサ12で検出されるトリガインとトリガアウトの時刻差を描くと、最小最大の差は、時刻ずれの場合と同様にセンサ位置に関わらず一定値となることを利用する。
さらに、従来の1点法で得られた振幅情報を用いることで周波数を得ることができる。従って、本発明により、1台の非接触センサ12で最大応答点の振幅、周波数を同時に得ることができる。また周波数は波形フィット法ではなく2つの波の振幅比から算出されるため、波形フィット法に見られるようなエリアジングによる周波数検出上限の制限も緩和される。
【0038】
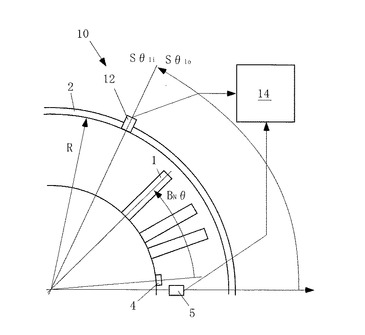
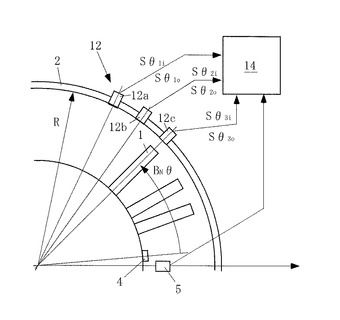
図6は、本発明の第2実施例による非接触翼振動計測装置の構成図である。
この図において、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ12を3台取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1i,Sθ1o、Sθ2i,Sθ2o、Sθ3i,Sθ3oは、この例では3台の非接触センサ12のキー溝センサ5からのそれぞれ立ち上りと立ち下りに対応する取付角度である。
その他の構成は、図3と同一である。
【0039】
上述した装置を用い、本発明の第2実施例では、3台の非接触センサ12(12a,12b,12c)を用い、回転翼1の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する。
【0040】
以下、本発明の第2実施例を詳述する。
【0041】
3台の非接触センサ12(12a,12b,12c)を通過する際の検出信号の立ち上りと立ち下りの時刻を、T1iN,T1oN、T2iN,T2oN、T3iN,T3oNとすると、3台の非接触センサ12(12a,12b,12c)の検出信号の立ち上りと立ち下りの時刻の差から、数5の式(14)〜式(16)が得られる。
【0042】
【数5】
【0043】
ここで、各非接触センサ12で計測される上記値は回転同期振動の場合には、従来の4点法と同様、収録回数rに無関係な一定値となる。
式(14)〜式(16)において、3つの未知数(振幅a1、周波数fb1または次数n1、および位相φ1)に対して3本の連立方程式が成立する。振動項のみを残してこの関数形を満たすように、振幅a1、周波数n1、位相φ1を求める。
この方法によれば周波数、振幅、位相を4点法と同様、ピーク位置に限定されず任意の位置で4点法より少数のセンサで連続的に知ることができる。
【0044】
すなわち、本発明の第2実施例では、3台の非接触センサ12(12a,12b,12c)から得られるトリガインとトリガアウトの時刻差について、波形フィット法の原理を用いることで、同様の情報を従来の4点法より少ないセンサ数で得ることができる。
【0045】
上述した本発明の方法によれば、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻の両方を有効に利用し、かつその時刻差から速度情報を求めるため、少ない非接触センサで同等の情報を得ることができる。
また、各非接触センサで、トリガイン信号とトリガアウト信号の両方を有効に利用できるため、センサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる。
【0046】
すなわち、本発明の原理では、従来法と同様の翼の振動時と非振動時の翼通過時刻(TOA)のずれから振動振幅を算出する方法に加えて、対象翼の厚さを知ったうえで、トリガ信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻差から速度情報を求めて、これを併用することで仮定なしに周波数情報を得る。なお、センサとして速度が検出できるもの(例えば、レーザレーダ)を用いてもよい。
【0047】
なお、本発明は上述した実施形態に限定されず、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0048】
1 回転翼、2 ケーシング、
3(3−1,3−2,3−3,3−4) 非接触センサ、
4 キー溝、5 キー溝センサ、
10 接触翼振動計測装置、
12(12a,12b,12c) 非接触センサ、
14 振動計測装置、
【技術分野】
【0001】
本発明は、回転翼を有するターボ機械の非接触翼振動計測方法に関する。
【背景技術】
【0002】
ガスタービン、航空エンジン、等の回転翼を有するターボ機械では、回転翼が振動して性能や寿命が低下することがある。そこで、回転翼の翼振動を非接触で計測する手段(以下、「非接触翼振動計測手段」と呼ぶ)が種々提案されている。
【0003】
従来の非接触翼振動計測手段の基本原理は、回転翼を囲むケーシングに回転翼の通過を検出する非接触センサを取り付けて、回転翼の振動時と非振動時の通過時刻(TOA:Time Of Arrival)のずれから振動振幅を算出するものである。
【0004】
また、直接計測された時刻情報から、振幅と周波数へ分離・換算することが計測原理上必要であり、その従来技術として、非接触センサを1台又は2台用いる「1自由度フィット法」や非接触センサを4台用いる「波形フィット法」が、例えば特許文献1,2や非特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−165089号公報、「非接触翼振動計測装置」
【特許文献2】特開2002−98584号公報、「翼振動計測方法及びこれを用いた翼振動監視システム」
【非特許文献】
【0006】
【非特許文献1】金子他、「改良少数点法を利用した可搬型非接触翼振動計測システムの開発」、日本機械学会、Dynamics and Design Conference 2001,OS−201
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した従来の1自由度フィット法では、非接触センサの必要数は、1台又は2台で足りるが、得られる情報が振幅のみであり、周波数と位相は求められない。また、従来の波形フィット法では、振幅、周波数及び位相が得られるが、4台以上の非接触センサを必要とする。
さらに、従来の波形フィット法では、検出周波数上限がセンサ間角度で制限される。センサ間角度を小さくするにはセンサピッチを小さくする必要があるが、センサ径は有限であるため、同じセンサ角度でもセンサピッチが小さくなる小径ターボ機械の計測に不向きであるなどの問題があった。
【0008】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、少ない非接触センサで同等の情報を得ることができ、かつセンサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる回転翼の非接触翼振動計測方法を提供することにある。
【課題を解決するための手段】
【0009】
本発明によれば、軸心を中心に回転し周方向に等間隔に配置された複数の回転翼と、該回転翼の半径方向外方端から間隔を隔てて回転翼を囲むケーシングとを有するターボ機械の非接触翼振動計測方法であって、
前記ケーシングに取り付けられた非接触センサで前記回転翼を非接触で検出し、
該非接触センサによる回転翼の検出信号の立ち上りと立ち下りの時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと前記立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する、ことを特徴とするターボ機械の非接触翼振動計測方法が提供される。
【0010】
本発明の好ましい第1実施例によれば、単一の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する。
【0011】
また本発明の好ましい第2実施例によれば、3台の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する。
【発明の効果】
【0012】
上記本発明の方法によれば、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻の両方を有効に利用し、かつその時刻差から速度情報を求めるため、少ない非接触センサで同等の情報を得ることができる。
【0013】
また、各非接触センサで、トリガイン信号とトリガアウト信号の両方を有効に利用できるため、センサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる。
【図面の簡単な説明】
【0014】
【図1】従来の非接触翼振動計測装置の構成図である。
【図2】1点法において、共振点との回転数比βを1のまわりで変化させた際のT1N3の挙動を示す図である。
【図3】本発明の第1実施例による非接触翼振動計測装置の構成図である。
【図4】本発明による非接触センサの検出信号の説明図である。
【図5】本発明において、共振点との回転数比βを1のまわりで変化させた際のT1N−T2Nの挙動を示す図である。
【図6】本発明の第2実施例による非接触翼振動計測装置の構成図である。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0016】
図1は、従来の非接触翼振動計測装置の構成図である。この図において、1は回転翼、2はケーシング、3(3−1,3−2,3−3,3−4)は非接触センサ、4はキー溝、5はキー溝センサである。すなわち、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ3を取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1,Sθ2,Sθ3,Sθ4は、この例では4台の非接触センサ3(3−1,3−2,3−3,3−4)のキー溝センサ5からのそれぞれの取付角度である。また、BNθは、キー溝4からN番目の回転翼1の取付角度、Rは、ケーシング2の半径である。
また、以下の説明において、T1N,T2N,T3N,T4Nは、N番目の回転翼1が4台の非接触センサ3(3−1,3−2,3−3,3−4)をそれぞれ通過する時刻である。
【0017】
以下、非接触センサを1台用いる従来の「1自由度フィット法」を「1点法」と呼ぶ。
1点法は、図1の非接触センサ3のうち1つ(ここでは非接触センサ3−1のみ)を用いて、得られた時刻情報から翼振動振幅を得る方法である。1点法の原理によれば、非接触センサ3−1で計測されるN番目の回転翼1の翼通過時刻T1Nは、数1の式(1)のように得られる。
【0018】
ここで、Trはロータ回転周期、rはロータ回転回数(サンプリング回数)、fb1〜fbxは翼振動数(回転次数比nとロータ回転数Ωとの積(n・Ω))、uは回転翼1の周速、Ωはロータ回転数((1/Tr )、a1(fb1)〜aX(fbx)は翼振動振幅(翼振動数fb1〜fbxの関数)、φ1(fb1)〜φX(fbx)は翼振動位相(翼振動数fb1〜fbxの関数)、n1〜nxは回転次数比(fb/Ω)である。
【0019】
式(1)の第1項,第2項は振動変位が生じていないときの時刻,第3項以降が翼振動にともなって生じる時刻ずれの項である。
式(1)において、ロータ回転周期Tr、ロータ回転回数r、キー溝4から1番目の回転翼1の取付角度B1θ、および非接触センサ3−1のキー溝センサ5からの取付角度Sθ1は、既知なので第1項,第2項は消去できる。
【0020】
簡単のため、翼振動に含まれる周波数成分が1成分のみ、つまり翼は、式(2)で振動していると考えて3項のみを考え、それをT1N3と置けば、式(3)となる。
さらに、翼振動a1を固有振動数ω、減衰比ζの1自由度系と仮定すれば、a1(fb1),φ1(fb1)は固有振動数ωと励振のfb1の比βを用いて、式(4)、式(5)のように表わされる。
【0021】
【数1】
【0022】
図2は、共振点との回転数比βを1のまわりで変化させた際のT1N3の挙動を示す図である。
この図において、センサ位置に関わらず、最大最小の巾ΔTOAはamax/uとして現れることが知られている。ここでロータ回転周期Trと回転翼1の周速uは既知なので、この性質を用いれば、回転数を連続的に上下させて得られた図2のような曲線から、翼の最大振動振幅amaxを得ることができる。
ただしこの過程で周波数は未定のままである。
【0023】
次に、非接触センサを2台用いる従来の「1自由度フィット法」(以下「2点法」と呼ぶ)を説明する。
2点法は、図1の非接触センサ3のうち2つ(ここでは非接触センサ3−1,3−2)を用い、1点法の式(1)を2つの非接触センサ3(たとえば非接触センサ3−1,3−2)の間で引いて、数2の式(6)を得る。
さらにこれに三角関数の公式(7)を用いれば、式(8)が得られる。
その後、振動成分について、1点法と同様の方法で振動振幅を求める方法である。
【0024】
【数2】
【0025】
しかし、2点法では実際の振動振幅に対して、2sin(n1(Sθ1−Sθ2)/2)倍された値が計測されるため,実振幅を求めるためには計測値の補正が必要である。言い換えれば,何らかの方法で翼振動数n1の推定ができなければ,正しい振幅を求めることはできない。
【0026】
次に、非接触センサを4台用いる従来の「波形フィット法」(以下「4点法」と呼ぶ)を説明する。
4点法は、図1の4台の非接触センサ3(3−1,3−2,3−3,3−4)をすべて用いる。2点法の式(8)を4台の非接触センサに用いることにより、数3の式(9)〜式(11)が得られる。
【0027】
【数3】
【0028】
回転同期振動の場合には、各センサで計測される振動データは収録回数rに無関係な一定値となるので、3つの未知数(振幅a1、周波数fb1または次数n1、および位相φ1)に対して3本の連立方程式が成立する。
振動項のみを残してこの関数形を満たすように振幅a1、翼振動数n1、位相φ1を求める。
1点法で得られるのは共振ピーク位置での振幅最大値のみであるが、この方法によれば、周波数、振幅、位相をピーク位置に限定されず、その周辺の任意の位置で連続的に知ることができる。
【0029】
図3は、本発明の第1実施例による非接触翼振動計測装置の構成図である。
この図において、1は回転翼、2はケーシング、12は非接触センサ、4はキー溝、5はキー溝センサである。すなわち、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ12を1台取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1i,Sθ1oは、この例では1台の非接触センサ12のキー溝センサ5からの立ち上りと立ち下りに対応する取付角度である。また、BNθは、キー溝4からN番目の回転翼1の取付角度、Rはケーシング2の半径である。
【0030】
接触翼振動計測装置10は、軸心を中心に回転し周方向に等間隔に配置された複数の回転翼1と、回転翼1の半径方向外方端から間隔を隔てて回転翼1を囲むケーシング2とを有するターボ機械の非接触翼振動計測装置である。
【0031】
図3において、接触翼振動計測装置10は、非接触センサ12と振動計測装置14とを備える。
非接触センサ12は、ケーシング2に取り付けられ回転翼1を非接触で検出する。
振動計測装置14は、非接触センサ12による回転翼1の検出信号の立ち上りと立ち下りの時刻から回転翼1の振動を計測し、回転翼1の振動時と非振動時の通過時刻のずれと検出信号の立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
【0032】
上述した装置を用い、本発明の非接触翼振動計測方法では、
(A)ケーシング2に取り付けられた非接触センサ12で回転翼1を非接触で検出し、
(B)非接触センサ12による回転翼1の検出信号の立ち上りと立ち下りの時刻から回転翼1の振動を計測し、回転翼1の振動時と非振動時の通過時刻のずれと検出信号の立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する。
また、この例では、単一の非接触センサ12を用い、回転翼1の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する。
【0033】
以下、本発明の方法を詳述する。
図4は、本発明による非接触センサの検出信号の説明図である。この図において、横軸は経過時間、縦軸はセンサ信号である。
この図において、T1iN,T1oNは、N番目の回転翼1が1台の非接触センサ12を通過する際の検出信号の立ち上りと立ち下りの時刻である。すなわち、たとえば、同一の非接触センサ12で、トリガイン時刻T1iNとトリガアウト時刻T1oNが得られたとする。
この場合、トリガアウト時刻−トリガイン時刻は、2点法の原理を用いて、数4の式(12)となる。
【0034】
【数4】
【0035】
図5は、本発明において、共振点との回転数比βを1のまわりで変化させた際のT1N−T2Nの挙動を示す図である。
1点法と同様に、翼を固有振動数ω、減衰比ζの1自由度系と仮定して振幅a1と位相φ1を有振動数ωと励振のfb1の比βの関数としたうえでβ=1のまわりで変化させた際のT1N−T2Nの振動成分(右辺第2項)の挙動は図5のようになる。
【0036】
1点法と同様に、センサ位置に関わらず、最大最小の巾は式(13)の一定値として現れることが分かる。
ここでR,Sθ1,Sθ2は既知で、a1は1点法により得られるから、周波数n1も得られる。この性質を用いれば、回転数を連続的に上下させて得られた図5のような曲線から、1本のセンサで翼の最大振動振幅amaxと周波数n1を同時に得ることができる。
【0037】
すなわち、本発明の第1実施例では、回転翼1が共振周波数を通過するときに1台の非接触センサ12で検出されるトリガインとトリガアウトの時刻差を描くと、最小最大の差は、時刻ずれの場合と同様にセンサ位置に関わらず一定値となることを利用する。
さらに、従来の1点法で得られた振幅情報を用いることで周波数を得ることができる。従って、本発明により、1台の非接触センサ12で最大応答点の振幅、周波数を同時に得ることができる。また周波数は波形フィット法ではなく2つの波の振幅比から算出されるため、波形フィット法に見られるようなエリアジングによる周波数検出上限の制限も緩和される。
【0038】
図6は、本発明の第2実施例による非接触翼振動計測装置の構成図である。
この図において、回転翼1を囲むケーシング2に回転翼1の通過を検出する非接触センサ12を3台取り付けて、回転翼1の振動時と非振動時の通過時刻を計測するようになっている。
この図において、Sθ1i,Sθ1o、Sθ2i,Sθ2o、Sθ3i,Sθ3oは、この例では3台の非接触センサ12のキー溝センサ5からのそれぞれ立ち上りと立ち下りに対応する取付角度である。
その他の構成は、図3と同一である。
【0039】
上述した装置を用い、本発明の第2実施例では、3台の非接触センサ12(12a,12b,12c)を用い、回転翼1の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する。
【0040】
以下、本発明の第2実施例を詳述する。
【0041】
3台の非接触センサ12(12a,12b,12c)を通過する際の検出信号の立ち上りと立ち下りの時刻を、T1iN,T1oN、T2iN,T2oN、T3iN,T3oNとすると、3台の非接触センサ12(12a,12b,12c)の検出信号の立ち上りと立ち下りの時刻の差から、数5の式(14)〜式(16)が得られる。
【0042】
【数5】
【0043】
ここで、各非接触センサ12で計測される上記値は回転同期振動の場合には、従来の4点法と同様、収録回数rに無関係な一定値となる。
式(14)〜式(16)において、3つの未知数(振幅a1、周波数fb1または次数n1、および位相φ1)に対して3本の連立方程式が成立する。振動項のみを残してこの関数形を満たすように、振幅a1、周波数n1、位相φ1を求める。
この方法によれば周波数、振幅、位相を4点法と同様、ピーク位置に限定されず任意の位置で4点法より少数のセンサで連続的に知ることができる。
【0044】
すなわち、本発明の第2実施例では、3台の非接触センサ12(12a,12b,12c)から得られるトリガインとトリガアウトの時刻差について、波形フィット法の原理を用いることで、同様の情報を従来の4点法より少ないセンサ数で得ることができる。
【0045】
上述した本発明の方法によれば、非接触センサによる回転翼の検出信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻の両方を有効に利用し、かつその時刻差から速度情報を求めるため、少ない非接触センサで同等の情報を得ることができる。
また、各非接触センサで、トリガイン信号とトリガアウト信号の両方を有効に利用できるため、センサピッチを小さくでき、これにより小径ターボ機械の計測に適用できる。
【0046】
すなわち、本発明の原理では、従来法と同様の翼の振動時と非振動時の翼通過時刻(TOA)のずれから振動振幅を算出する方法に加えて、対象翼の厚さを知ったうえで、トリガ信号の立ち上り(トリガイン)と立ち下り(トリガアウト)の時刻差から速度情報を求めて、これを併用することで仮定なしに周波数情報を得る。なお、センサとして速度が検出できるもの(例えば、レーザレーダ)を用いてもよい。
【0047】
なお、本発明は上述した実施形態に限定されず、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0048】
1 回転翼、2 ケーシング、
3(3−1,3−2,3−3,3−4) 非接触センサ、
4 キー溝、5 キー溝センサ、
10 接触翼振動計測装置、
12(12a,12b,12c) 非接触センサ、
14 振動計測装置、
【特許請求の範囲】
【請求項1】
軸心を中心に回転し周方向に等間隔に配置された複数の回転翼と、該回転翼の半径方向外方端から間隔を隔てて回転翼を囲むケーシングとを有するターボ機械の非接触翼振動計測方法であって、
前記ケーシングに取り付けられた非接触センサで前記回転翼を非接触で検出し、
該非接触センサによる回転翼の検出信号の立ち上りと立ち下りの時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと前記立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する、ことを特徴とするターボ機械の非接触翼振動計測方法。
【請求項2】
単一の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する、ことを特徴とする請求項1に記載のターボ機械の非接触翼振動計測方法。
【請求項3】
3台の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する、ことを特徴とする請求項1に記載のターボ機械の非接触翼振動計測方法。
【請求項1】
軸心を中心に回転し周方向に等間隔に配置された複数の回転翼と、該回転翼の半径方向外方端から間隔を隔てて回転翼を囲むケーシングとを有するターボ機械の非接触翼振動計測方法であって、
前記ケーシングに取り付けられた非接触センサで前記回転翼を非接触で検出し、
該非接触センサによる回転翼の検出信号の立ち上りと立ち下りの時刻から回転翼の振動を計測し、回転翼の振動時と非振動時の通過時刻のずれと前記立ち上りと立ち下りの時刻の差から振動振幅及び周波数を算出する、ことを特徴とするターボ機械の非接触翼振動計測方法。
【請求項2】
単一の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、2点法の原理を用いて、振動振幅及び周波数を算出する、ことを特徴とする請求項1に記載のターボ機械の非接触翼振動計測方法。
【請求項3】
3台の非接触センサを用い、回転翼の検出信号の立ち上りと立ち下りの時刻の差から、波形フィット法の原理を用いて、振幅、周波数及び位相を算出する、ことを特徴とする請求項1に記載のターボ機械の非接触翼振動計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−276438(P2010−276438A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−128538(P2009−128538)
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]