
回転装置を監視するためのシステムおよび方法

【課題】回転装置の動作を監視する際に使用するためのシステムおよび方法を提供する。
【解決手段】プロセッサは、センサ42、入力装置、および表示装置と通信するように結合されており、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算するようにプログラムされている。コンポーネントの相対位置に関連付けられる複数の軌道位置値は、プロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【解決手段】プロセッサは、センサ42、入力装置、および表示装置と通信するように結合されており、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算するようにプログラムされている。コンポーネントの相対位置に関連付けられる複数の軌道位置値は、プロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書に開示された対象は一般的に監視システムに関し、より具体的には回転装置の動作を監視する際に使用するためのシステムおよび方法に関する。
【背景技術】
【0002】
知られている機械は、動作中に振動や他の挙動を示すことがある。このような挙動を測定して、たとえばモーター駆動軸において示された振動の量、軸の回転位置、および/あるいは機械またはモーターの他の適切な動作特性を決定するためにセンサを使用できる。多くの場合、センサは複数のモニタおよび少なくとも1つのプロセッサを含む監視システムに結合されている。監視システムは、センサから検知した測定値を表す信号を受信して、ユーザによって使用可能な形式で測定値を表示する診断プラットフォームにそれらの測定値を送信する。
【0003】
しかし、少なくともいくつかの知られている診断プラットフォームは、センサから受信した測定値を表示するために利用できる領域が限られている場合がある。したがって、知られている診断システムは、一度に所望の測定データの一部しか技術者またはユーザに表示できない場合がある。このように、技術者またはユーザは、機械内の動作障害および/またはエラーを容易におよび/または迅速に診断できない場合がある。障害および/またはエラーの診断に付随する困難、および/またはその遅延によって、機械に損傷を生じさせることもあり、および/または望ましくないことに一定期間その機械が使えなくなることもある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願公開第2011/0125461号明細書
【発明の概要】
【0005】
一態様では、回転装置の動作を監視する際に使用するためのシステムが提供される。本システムは、少なくとも1つのセンサ、入力装置、表示装置、およびプロセッサを含む。センサは、回転装置に結合されたコンポーネントの位置を検知して、参照に対してコンポーネントの位置を示す信号を生成するように構成されている。入力装置は、ユーザ選択入力を示す信号を生成するように構成されている。プロセッサは、センサ、入力装置、および表示装置と通信するように結合されており、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算するようにプログラムされている。コンポーネントの相対位置に関連付けられる複数の軌道位置値は、プロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【0006】
他の態様では、コンピュータ実行可能命令を実装した1つまたは複数のコンピュータ可読記憶メディアであって、そのコンピュータ実行可能命令が少なくとも1つのプロセッサによって実行されると、少なくとも1つのプロセッサに、参照に対して回転装置に結合されたコンポーネントの位置を示す信号を受信させるコンピュータ可読記憶メディアが提供される。プロセッサは、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値も計算する。コンポーネントの相対位置に関連付けられる複数の軌道位置値がプロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【0007】
他の態様では、回転装置の動作を監視する方法が提供される。本方法は、参照に対して、少なくとも1つのセンサから回転装置に結合されたコンポーネントの相対位置を示す1つまたは複数の信号を送信するステップを含む。コンピューティングデバイスは、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算する。基準面内のコンポーネントの位置を含む複数の軌道位置値は、コンピューティングデバイスによって計算される。コンピューティングデバイスは、計算された時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを表す。
【図面の簡単な説明】
【0008】
【図1】例示的な回転装置の概略図である。
【図2】図1に示される回転装置で使用できる例示的なコンポーネントの断面図である。
【図3】図1に示される回転装置を監視するために使用できる例示的な監視システムのブロック図である。
【図4】図1に示される回転装置の動作を監視する際に使用できる例示的方法の流れ図である。
【図5】図4に示される方法で使用できる例示的なグラフィカルインターフェースである。
【発明を実施するための形態】
【0009】
本明細書に記載の例示的方法およびシステムは、基準面内の回転コンポーネントの検知された振動に対応する複数のトレースを同時に表示する監視システムを提供することによって、少なくともいくつかの知られている診断プラットフォームの少なくともいくつかの欠点を克服する。さらに本明細書に記載の実施形態は、コンポーネントの検知された振動振幅に対応する複数のトレースを図で表すコンピューティングデバイスを含み、ユーザが複数の測定スケール因子から選択することによってトレースのサイズおよび形を調整できるようにする。本明細書に記載の監視システムは、回転コンポーネントの振動振幅に対応する複数のトレースを表示することによって、ユーザが知られている診断システムと比較して望ましくない振動振幅を迅速かつ効率的に識別できるようにする。その結果、回転コンポーネントの動作効率の向上が促進される。
【0010】
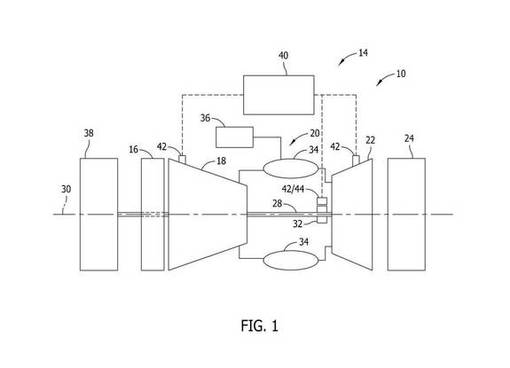
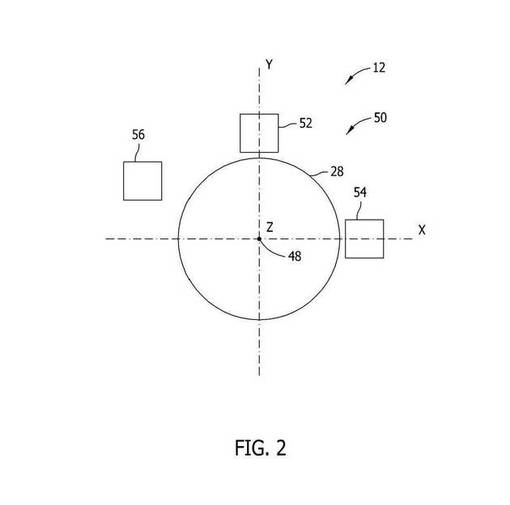
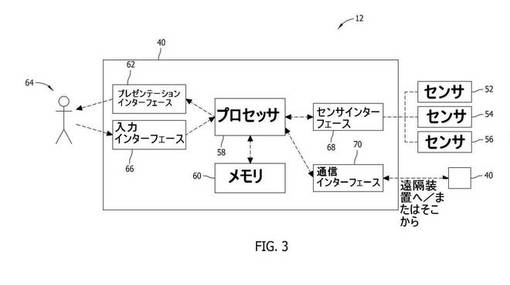
図1は、例示的な回転装置10の概略図である。図2は、回転装置10で使用できる例示的な回転コンポーネント12の断面図である。回転装置10の動作中、回転コンポーネント12の相対位置が知られていることが望ましい。図3は、回転装置10を監視するために使用できる例示的な監視システム14のブロック図である。
【0011】
例示的実施形態では、回転装置10はタービンエンジンシステムである。あるいは、回転装置10はスチームタービンエンジン、ポンプ、モーター、または回転コンポーネントを含む他の任意のシステムでもよい。例示的実施形態では、タービンエンジンシステム10は、吸気部分16、吸気部分16の下流に結合された圧縮部分18、圧縮部分18の下流に結合された燃焼部分20、燃焼部分20の下流に結合されたタービン部分22、および排気部分24を含む。駆動軸28は、中心軸30に沿ってタービン部分22と圧縮部分18との間に拡張する。さらに、タービンエンジンシステム10は、駆動軸28を支持するために、少なくとも1つのベアリング32などの少なくとも1つの支持要素も含む。燃焼部分20は複数の燃焼器34を含む。燃焼部分20は、それぞれの燃焼器34が圧縮部分18と流体連通できるように圧縮部分18に結合されている。
【0012】
燃料アセンブリ36は、燃料の流れを燃焼器34に提供するためにそれぞれの燃焼器34に結合されている。タービン部分22は、タービンエンジンシステム10の動作中に発電機38に電力負荷を与えるために、駆動軸28で圧縮部分18および発電機38に回転自在に結合されている。発電機38は、ユーティリティグリッドに電力を供給するために、たとえば電気ユーティリティグリッド(図示せず)などの電源に結合されている。あるいは、回転装置10は他の構成を有して、他のタイプのコンポーネントを使用してもよい。たとえば、回転装置10は複数のガスタービンエンジン、他のタイプのタービン、および/または他のタイプの発電装置を含んでもよい。
【0013】
例示的実施形態では、監視システム14は、複数のセンサ42と通信するように結合されたコンピューティングデバイス40を含む。それぞれのセンサ42は、タービンエンジンシステム10の動作および環境状態に関する様々なパラメータを検知する。センサ42は、振動センサ、位置センサ、温度センサ、加速センサ、速度センサ、流圧センサ、電力負荷センサ、および/またはタービンエンジンシステム10の動作に関する様々なパラメータを検知する他の任意のセンサを含むことができるが、それらだけに限定されない。本明細書で使用されるように、「パラメータ」という用語は、定められた位置での温度、流圧、電力負荷、振動、回転速度、および流量など、その値がタービンエンジンシステム10の動作および環境状態を定義するために使用できる物理的プロパティを指す。
【0014】
例示的実施形態では、監視システム14は、コンポーネント12の振動および/または位置を検知するために、たとえば圧縮部分18、タービン部分22、および/または駆動軸28などの、タービンエンジンシステム10のコンポーネント12の近傍に、または隣接して位置する少なくとも1つの近接センサ44を含む。近接センサ44はコンピューティングデバイス40と通信できるように結合されており、近接センサ44に対するコンポーネント12の位置を検知して、検知した位置をコンピューティングデバイス40に送信するように構成されている。一実施形態では、近接センサ44は、ベアリング32に対する駆動軸28の振動および/または位置を検知するために、駆動軸28に隣接して、およびベアリング32の近傍にまたは隣接して位置する。他の実施形態では、近接センサ44は、コンポーネント12の位置および/または振動を示す信号を生成するために渦電流を生成する。さらに、近接センサ44は、駆動軸28と近接センサ44との間の間隙またはスペースなどの、回転機械コンポーネント12間の間隙46またはスペースを示す信号を生成するために渦電流を生成する。
【0015】
例示的実施形態では、駆動軸28に関する3次元のデカルト座標系を定義するために、3つの直交軸X、Y、およびZが使用されている。具体的には、Z軸はコンポーネント12の中心点48を通じて実質的に同軸で拡張するように配置され、X軸およびY軸はタービンエンジンシステム10内に基準面50を形成するように交差している。例示的実施形態では、監視システム14は、Y軸に対するコンポーネント12の位置を検知する際に使用するための、および検知した位置をコンピューティングデバイス40に送信するための、Y軸に沿ってコンポーネント12に隣接して位置する第1近接センサ52を含む。監視システム14は、X軸に対するコンポーネント12の位置を検知する際に使用するための、および検知した位置を示す信号をコンピューティングデバイス40に送信するための、X軸に沿ってコンポーネント12に隣接して位置する第2近接センサ54も含む。
【0016】
さらに、例示的実施形態では、監視システム14は、コンポーネント12の回転速度および/または回転周波数を検知する際に使用するための、および検知した回転速度および/または検知した回転周波数を示す信号をコンピューティングデバイス40に送信するための、少なくとも1つの速度センサ56を含む。より具体的には、コンポーネント12のそれぞれの回転中にマークまたはノッチ(図示せず)が速度センサ56を超えて回転すると、それぞれの速度センサ56は、コンポーネント12上に、所定のマーク、あるいは磁気ストライプまたはコンポーネント12からの異なる物質、あるいはノッチなどの目印を検出する。他の増分回転/時間目印±90°、±180°などがあってよい。例示的実施形態では、速度センサ56は、コンポーネント12の回転周波数を計算または決定する際に使用するために、マークまたはノッチの検出を表す信号をコンピューティングデバイス40に送信する。
【0017】
例示的実施形態では、コンピューティングデバイス40は、プログラムされた命令を実行するためにメモリ装置60と通信するように結合されたプロセッサ58を含む。いくつかの実施形態では、実行可能命令はメモリ装置60に格納される。あるいは、実行可能命令はコンピュータネットワークを介して他の装置から取得されてもよい。例示的実施形態では、コンピューティングデバイス40は、プログラミングプロセッサ58によって本明細書に記載の1つまたは複数の動作を実行するようにプログラム可能である。たとえば、プロセッサ58は、動作を1つまたは複数の実行可能命令として符号化して、その実行可能命令をメモリ装置60内に提供することによってプログラムできる。プロセッサ58は1つまたは複数の処理装置を含むことができる(たとえばマルチコア構成で)。
【0018】
プロセッサ58は、汎用中央処理装置(CPU)、グラフィック処理装置(GPU)、マイクロコントローラ、縮小命令セットコンピュータ(RISC)プロセッサ、特定用途向け集積回路(ASIC)、プログラマブル論理回路(PLC)、および/あるいは本明細書に記載の機能を実行できる他の回路またはプロセッサを含むことができるが、それらに限定されない。本明細書に記載の方法は、これに限定されないが記憶装置および/またはメモリ装置を含む、持続性コンピュータ可読メディアで実施される実行可能命令として符号化できる。プロセッサによって実行されると、このような命令は本明細書に記載の方法の少なくとも一部をプロセッサに実行させる。上記の例は例示的なものに過ぎず、プロセッサという用語を定義および/または意味を限定することを意図するものでは決してない。
【0019】
例示的実施形態では、メモリ装置60は、実行可能命令および/または他のデータなどの情報を選択的に格納および取得できるようにする1つまたは複数の装置である。メモリ装置60は、ダイナミックランダムアクセスメモリ(DRAM)、スタティックランダムアクセスメモリ(SRAM)、ソリッドステートディスク、および/またはハードディスクなどの1つまたは複数のコンピュータ可読メディアを含むことができるが、それらに限定されない。メモリ装置60は、これに限定されないが、実行可能命令および/または本明細書に記載の方法で使用することに適した他の任意のタイプのデータを格納するように構成され得る。
【0020】
例示的実施形態では、コンピューティングデバイス40は、プロセッサ58に結合されたプレゼンテーションインターフェース62を含む。プレゼンテーションインターフェース62は、これに限定されないが、コンポーネント12の検知された振動振幅に対応する複数のトレースなどの情報をユーザ64に出力(たとえば、表示、印刷、および/またはその他の出力)するように構成されている。たとえば、プレゼンテーションインターフェース62は、ブラウン管(CRT)、液晶ディスプレイ(LCD)、有機LED(OLED)ディスプレイ、および/または「電子インク」ディスプレイなどの表示装置に結合されたディスプレイアダプタ(図示せず)を含むことができる。いくつかの実施形態では、プレゼンテーションインターフェース62は複数の表示装置を含む。
【0021】
コンピューティングデバイス40は、ユーザ64から入力を受信する入力インターフェース66も含む。入力インターフェース66は、構成データ(たとえばディスプレイ上に提示されるトレースの倍率を増減させるためのスケール因子)の選択またはエントリ、および/または本明細書に記載の方法およびシステムで使用することに適した他の任意の情報を受信するように構成され得る。
【0022】
例示的実施形態では、入力インターフェース66は、たとえばキーボード、ポインティングデバイス、マウス、スタイラス、タッチパネル(たとえばタッチパッドまたはタッチスクリーン)、ジャイロスコープ、加速度計、位置検出器、トグルスイッチ、セレクタダイヤル、および/または音声入力インターフェースを含むことができ、プロセッサ58に結合される。タッチスクリーンなどの単一のコンポーネントは、プレゼンテーションインターフェース62の表示装置、および入力インターフェース66の両方として機能できる。
【0023】
さらに、コンピューティングデバイス40は、少なくとも1つのセンサ42に結合されたセンサインターフェース68を含む。それぞれのセンサ42は、コンポーネント12の検知された動作パラメータに対応する信号を送信する。それぞれのセンサ42は信号を連続的、定期的、または一度だけ、および/あるいはコンピューティングデバイス40が本明細書に記載されるように機能できるようにする他の任意の信号タイミングで送信できる。さらに、それぞれのセンサ42は信号をアナログ形式でもデジタル形式でも送信できる。
【0024】
コンピューティングデバイス40は、プロセッサ58に結合された通信インターフェース70を含むことができる。通信インターフェース70は、他のコンピューティングデバイス40などの遠隔装置と通信するように結合されている。たとえば、通信インターフェース70は、有線ネットワークアダプタ、無線ネットワークアダプタ、および/またはモバイル遠隔通信アダプタを含むことができるが、それらに限定されない。他の任意の装置もコンピューティングデバイス40に対して遠隔にあると考えることができる。たとえば、コンピューティングデバイス40が通信インターフェース70を介して通信する(たとえば、共有メモリ装置60を介して通信することとは対照的に)他の任意のコンピューティングデバイス40も遠隔にあると考えることができる。あるいは、コンピューティングデバイス40からの所定の距離よりも離れた場所にある場合、その装置は遠隔にあると考えることができる。所定の距離は、たとえば、地理の観点(たとえば10メートル、100メートル、または1キロメートル)、および/またはネットワークトポロジの観点(たとえば1ネットワークリンク、2ネットワークリンク、または5ネットワークリンク離れている)から表すことができる。
【0025】
例示的実施形態では、コンピューティングデバイス40は、コンポーネント12の振幅を計算する際、および/または計算されたコンポーネント振動に対応するトレースを表示する際に使用するデータをメモリ装置60に格納する、および/または通信インターフェース70を介して(たとえば他のコンピューティングデバイス40から)それらのデータにアクセスするように動作可能である。
【0026】
動作中、吸気部分16は圧縮部分18に向けて空気を流す。圧縮部分18は流入空気を高圧および高温に圧縮して、圧縮された空気を燃焼部分20に排出する。燃料は燃料アセンブリ36からそれぞれの燃焼器34に流され、そこで燃料が圧縮された空気と混ざって燃焼部分20で点火される。燃焼部分20は燃焼ガスをタービン部分22に流し、そこで熱エネルギーが圧縮部分18および/または発電機38を駆動するための機械回転エネルギーに変換される。排気ガスはタービン部分22から出て、排気部分24を通って大気に流れる。近接センサ52および54は、コンポーネント12の基準面50に対する位置および/または振動を検知して、検知した位置および/または振動を示す信号をコンピューティングデバイス40に送信する。コンピューティングデバイス40は、所定の期間について、所定の軸に沿ったコンポーネント12の位置を含む複数の時間ベースの位置値を計算する。より具体的には、コンピューティングデバイス40は、所定の期間について、Y軸に沿ったコンポーネント12の位置を含む複数の第1の時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、所定の期間について、X軸に沿ったコンポーネント12の位置を含む複数の第2の時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、基準面50内のコンポーネント中心点48の位置を含む複数の軌道位置値を計算する。
【0027】
例示的実施形態では、コンピューティングデバイス40は、プレゼンテーションインターフェース62を介して、計算された時間ベースの位置値に対応する複数の時間ベースのトレースを図で表す。さらに、コンピューティングデバイス40は、計算された軌道位置値に対応する複数の軌道トレースを図で表す。例示的実施形態では、コンピューティングデバイス40は、コンピューティングデバイス40へのユーザ選択入力に応じて複数の時間ベースのトレースおよび/または複数の軌道トレースを選択的に提示する。
【0028】
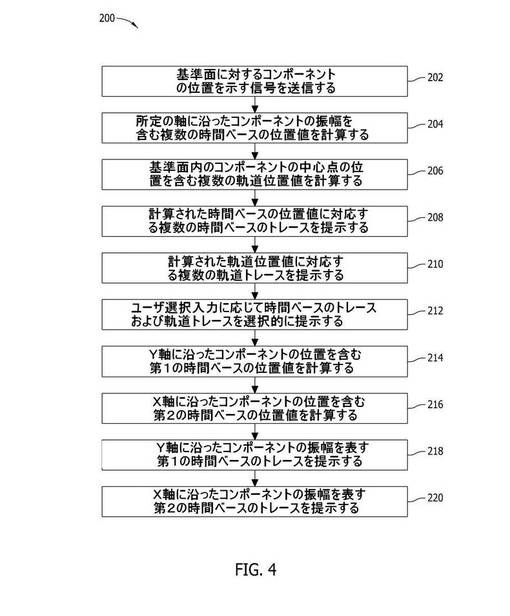
図4は、回転装置10(図1に示される)の動作を監視する際に使用できる例示的方法200の流れ図である。方法200の一部は、コンピューティングデバイス40のいずれか1つ、または任意の組合せによって実行され得る(図1に示される)。図5は、回転装置10の動作を監視するために使用できる例示的なグラフィカルインターフェース72である。例示的実施形態では、グラフィカルインターフェース72はコンピューティングデバイス40によって提示され(たとえば、図3に示されるプレゼンテーションインターフェース62を介して)、入力インターフェース66(図3に示される)を介して入力(たとえば、選択および/またはエントリ)を受信できる。一実施形態では、本明細書に記載の選択のうちの1つまたは複数は、通信インターフェース70(図3に示される)を介して受信される。たとえば、選択は遠隔コンピューティングデバイス40の入力インターフェース66を介して受信でき、遠隔コンピューティングデバイス40の通信インターフェース70によって送信できる。
【0029】
例示的実施形態では、方法200は、近接センサ44からコンピューティングデバイス40に、基準面50に対するコンポーネント12の位置を示す信号を送信するステップ202を含む。コンピューティングデバイス40は、受信した信号に少なくとも部分的に基づいて、所定の期間について、所定の軸に沿ったコンポーネント12の振動振幅を含む、複数の時間ベースの位置値を計算する(204)。コンピューティングデバイス40は、基準面50内のコンポーネント12の中心点48の位置を含む、複数の軌道位置値も計算する(206)。例示的実施形態では、コンピューティングデバイス40は、計算された時間ベースの位置値に対応する、および所定の軸に沿ったコンポーネント12の振動振幅を表す、複数の時間ベースのトレース100を提示する(208)。さらに、コンピューティングデバイス40は、計算された軌道位置値に対応する、およびX軸およびY軸に沿った基準面50内の中心点48の位置を表す、複数の軌道トレース102を提示する(210)。さらに、コンピューティングデバイス40は、コンピューティングデバイス40へのユーザ選択入力に応じて、時間ベースのトレース100、軌道トレース102、または時間ベースのトレース100および軌道トレース102の両方を選択的に提示する(212)。一実施形態では、コンピューティングデバイス40は、コンポーネント12の回転方向を示す、軌道トレース102に隣接する矢印104を表示する。
【0030】
方法200は、Y軸に沿ったコンポーネント12の位置を含む、第1の複数の時間ベースの位置値を計算するステップ(214)、およびX軸に沿ったコンポーネント12の位置を含む、第2の複数の時間ベースの位置値を計算するステップ(216)も含む。さらに、コンピューティングデバイス40は、所定の期間について、計算された第1の複数の時間ベースの位置値に対応する、およびY軸に沿ったコンポーネント12の振動振幅を表す、第1の複数の時間ベースのトレース106を提示する(218)。さらに、コンピューティングデバイス40は、所定の期間について、計算された第2の時間ベースの位置値に対応する、およびX軸に沿ったコンポーネント12の振動振幅を表す、第2の複数の時間ベースのトレース108を提示する(220)。
【0031】
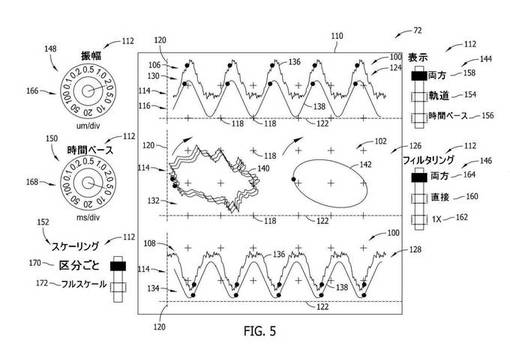
例示的実施形態では、コンピューティングデバイス40はグラフィカルインターフェース72にデータディスプレイ110および複数のセレクタ112を提示する。それぞれのセレクタ112は、データディスプレイ110内に提示される時間ベースのトレース100および軌道トレース102を可変的に選択および調整できるようにするために、ユーザ選択入力を受信するように構成されている。さらに、データディスプレイ110は、時間ベースのトレース100および軌道トレース102を表示する複数のデータ部分114を含む。それぞれのデータ部分114は、縦軸120に沿って、および横軸122に沿って配置された、複数の区分118に分割されたグラフィカルスケール116を含む。
【0032】
例示的実施形態では、データディスプレイ110は、第1データ部分124、第2データ部分126、および第3データ部分128を含む。第1データ部分124は第1グラフィカルスケール130に関する第1の時間ベースのトレース106を提示しており、縦軸120に沿ってY軸に関するコンポーネントの振動振幅を表示して、横軸122に沿って時間を表示している。第2データ部分126は軌道トレース102を提示しており、縦軸120に沿ってY軸に関するコンポーネントの振動振幅を表示して、横軸122に沿ってX軸に関するコンポーネントの振動振幅を表示する、第2グラフィカルスケール132を含む。第3データ部分128は、第3グラフィカルスケール134に関する第2の時間ベースのトレース108を提示しており、縦軸120に沿ってX軸に関するコンポーネントの振動振幅を表示して、横軸122に沿って時間を表示している。例示的実施形態では、第2データ部分126は、縦軸120に沿って第1データ部分124と第3データ部分128との間にあるので、第1の時間ベースのトレース106と第2の時間ベースのトレース108との間に軌道トレース102が表示される。さらに、例示的実施形態では、第1グラフィカルスケール130のスケール単位は、第2グラフィカルスケール132および第3グラフィカルスケール134のスケール単位とほぼ等しいので、第1の時間ベースのトレース106は第2の時間ベースのトレース108および軌道トレース102に対応して、ユーザが第1の時間ベースのトレース106および第2の時間ベースのトレース108、ならびに軌道トレース102を視覚的に比較して、コンポーネント12を監視できるようにする。
【0033】
例示的実施形態では、方法200は、複数の所定のスケール振幅因子を含む時間ベースの位置値および軌道位置値を計算するステップを含む。コンピューティングデバイス40は、ユーザ選択入力に応じて、所定のスケール振幅因子に対応する時間ベースのトレース100および軌道トレース102を選択的に提示する。さらに、コンピューティングデバイス40は、1、2、5、および10の倍数の振幅などの、スケール振幅因子に対応する時間ベースのトレース100および軌道トレース102を選択的に提示する。
【0034】
方法200は、複数の所定のスケール期間を含む時間ベースの位置値を計算するステップも含む。コンピューティングデバイス40は、ユーザ選択入力に応じて所定のスケール期間に対応する第1の時間ベースのトレース106および第2の時間ベースのトレース108を選択的に提示する。さらに、コンピューティングデバイス40は、1、2、5、および10の倍数の期間などの、スケール期間に対応する第1の時間ベースのトレース106および第2の時間ベースのトレース108を選択的に提示する。
【0035】
例示的実施形態では、それぞれの区分118は、振動振幅単位および/または時間単位などの所定の測定単位に対応する。コンピューティングデバイス40は、ユーザ選択入力に応じて、それぞれの区分118によって定義された測定単位の量を選択的に調整することによって、時間ベースのトレース100および軌道トレース102のサイズおよび形を調整する。さらに、グラフィカルスケール116内のそれぞれの軸120および122は、所定の測定単位の量を含む。コンピューティングデバイス40は、ユーザ選択入力に応じて、それぞれの軸120および122によって定義された測定単位の量を選択的に調整することによって、時間ベースのトレース100および軌道トレース102のサイズおよび形も調整する。
【0036】
例示的実施形態では、方法200は、速度センサ56からコンピューティングデバイス40に、回転装置10および/またはコンポーネント12の回転周波数を示す信号を送信するステップも含む。コンピューティングデバイス40は、検知された回転周波数に少なくとも部分的に基づいて、複数のフィルタリングされた時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、検知された回転周波数に基づいて、複数のフィルタリングされた軌道位置値を計算する。より具体的には、コンピューティングデバイス40は、たとえばコンポーネント12の検知された回転周波数についての中心周波数とともにバンドパスフィルタ(図示せず)を使用して、フィルタリングされた時間ベースの位置値および軌道位置値を計算する。このように、例示的実施形態では、フィルタはセンサ52および54から受信した信号から望ましくない周波数コンポーネントを除去するので、それぞれのコンポーネント12の振動の振幅を分離することもでき、および/またはより容易に見られるようにすることもできる。あるいは、フィルタはローパスフィルタ、ハイパスフィルタ、または監視システム14が本明細書に記載されるように機能できるようにする他の任意のフィルタでよい。
【0037】
例示的実施形態では、コンピューティングデバイス40は、フィルタリングされていない時間ベースの位置値に対応する複数の直接時間ベースのトレース136、および計算されたフィルタリングされた時間ベースの位置値に対応する複数のフィルタリングされた時間ベースのトレース138を選択的に提示する。同様に、コンピューティングデバイス40は、フィルタリングされていない軌道位置値に対応する複数の直接軌道トレース140、および計算されたフィルタリングされた軌道位置値に対応する複数のフィルタリングされた軌道トレース142を選択的に提示する。例示的実施形態では、コンピューティングデバイス40は、ユーザ選択入力に応じて、フィルタリングされた時間ベースのトレース138および/または直接時間ベースのトレース136を選択的に提示する。さらに、コンピューティングデバイス40は、縦軸120に沿って直接時間ベースのトレース136に隣接するフィルタリングされた時間ベースのトレース138を提示する。コンピューティングデバイス40は、ユーザ選択入力に応じて、フィルタリングされた軌道トレース142および/または直接軌道トレース140も選択的に提示する。さらに、コンピューティングデバイス40は、横軸122に沿ってフィルタリングされた軌道トレース142に隣接する直接軌道トレース140を提示する。
【0038】
例示的実施形態では、グラフィカルインターフェース72は、トレース表示セレクタ144、フィルタリングセレクタ146、振幅因子セレクタ148、時間ベースの因子セレクタ150、およびスケーリングセレクタ152を含む。トレース表示セレクタ144は、データディスプレイ110内に表示されるべきトレースをユーザが選択できるように構成されている。トレース表示セレクタ144は、軌道トレース選択154、時間ベース選択156、および軌道/時間ベース(OTB)トレース選択158を含む。コンピューティングデバイス40は、軌道トレース選択154、時間ベース選択156、またはOTBトレース選択158に対応するユーザ選択入力に応じて、時間ベースのトレース100および/または軌道トレース102を選択的に提示する。例示的実施形態では、コンピューティングデバイス40は、軌道トレース選択154のユーザ選択に応じて軌道トレース102を提示する。さらに、コンピューティングデバイス40は、時間ベース選択156の選択に応じて時間ベースのトレース100を提示して、OTBトレース選択158の選択に応じて時間ベースのトレース100と軌道トレース102の両方を提示する。
【0039】
フィルタリングセレクタ146は、直接時間ベースのトレース136および直接軌道トレース140、あるいは/またはフィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142をユーザが選択的に提示できるように構成されている。フィルタリングセレクタ146は、直接トレース選択160、フィルタリングされたトレース選択162、および直接/フィルタリングされたトレース選択164を含む。コンピューティングデバイス40は、直接トレース選択160のユーザ選択に応じて、直接時間ベースのトレース136および直接軌道トレース140を提示して、フィルタリングされたトレース選択162のユーザ選択に応じて、フィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142を提示する。さらに、コンピューティングデバイス40は、直接/フィルタリングされたトレース選択164のユーザ選択に応じて、直接時間ベースのトレース136および直接軌道トレース140と、フィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142との両方を提示する。
【0040】
振幅因子セレクタ148によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義された測定単位を調整することによって時間ベースのトレース100および軌道トレース102のサイズおよび形を調整できるようになる。振幅因子セレクタ148は、グラフィカルスケール116またはそれぞれの区分118によって定義された振幅単位に対応する複数の振幅因子166を含む。コンピューティングデバイス40は、選択された振幅因子に対応する時間ベースのトレース100および軌道トレース102を提示する。例示的実施形態では、振幅因子セレクタ148は、1、2、5、および10の倍数のスケール単位を含む振幅因子を含む。あるいは、振幅因子セレクタ148は、監視システム14が本明細書に記載されるように機能できるようにするために、任意の適切な数のスケーリング因子を含むことができる。
【0041】
時間ベースの因子セレクタ150によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義された期間を調整することによって時間ベースのトレース100のサイズおよび形を調整できるようになる。時間ベースの因子セレクタ150は、1、2、5、および10の倍数のスケール単位を含む複数の期間スケーリング因子168を含む。あるいは、時間ベースの因子セレクタ150は、監視システム14が本明細書に記載されるように機能できるようにするために、他の適切な数のスケーリング因子を含むことができる。例示的実施形態では、コンピューティングデバイス40は、選択された期間スケーリング因子に対応するようにグラフィカルスケール116またはそれぞれの区分18によって定義された期間を調整することによって、選択された期間振幅因子に対応する時間ベースのトレース100を選択的に提示する。
【0042】
スケーリングセレクタ152によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義されたスケールを調整できるようになる。スケーリングセレクタ152は、区分ごとの選択170およびフルスケール選択172を含む。コンピューティングデバイス40は、区分ごとの選択170のユーザ選択に応じてそれぞれの区分118によって定義された測定単位の量を調整する。より具体的には、区分ごとの選択170を選択した後、振幅因子166および期間スケーリング因子168がそれぞれの区分118によって定義された測定単位の量を調整する。さらに、フルスケール選択172を選択した後、振幅因子166および期間スケーリング因子168がグラフィカルスケール116によって定義された測定単位の総数を調整する。
【0043】
ユーザがX軸およびY軸に沿ったコンポーネント12の検知された振動振幅を相互に関連付けて、コンポーネント12内の望ましくない振動振幅を迅速かつ効率的に識別できるようにするために、データディスプレイ110内の時間ベースのトレース100および軌道トレース102の配置および位置が選択される。さらに、監視システム14によって、ユーザは時間ベースのトレース100および軌道トレース102の振幅および期間を調整することによって時間ベースのトレース100および軌道トレース102のサイズおよび形を調整できるようになる。時間ベースのトレース100および軌道トレース102を選択的に提示することによって、監視システムによってユーザは望ましくない振動振幅を識別できるようになるので、ユーザは修正措置を取ってコンポーネント12および/または回転装置10に損傷が生じるのを減らすことができる。
【0044】
上述のシステムおよび方法は、基準面内の回転コンポーネントの検知された振動振幅に対応する複数のトレースを選択的に提示できるようにする監視システムを提供することによって、知られている診断プラットフォームの少なくともいくつかの欠点を克服する。さらに本明細書に記載の実施形態は、X軸およびY軸に沿った回転コンポーネントの位置を検知して、検知された振動振幅に対応する複数のトレースをデカルト座標系内に図で表す監視システムを提供する。さらに、監視システムによって、ユーザは複数のスケール因子から選択することによってトレースのサイズおよび形を選択的に調整して、表示されたトレースに対応するスケール振幅およびスケール期間を調整できるようになる。回転コンポーネントの振動振幅に対応する複数のトレースを表示することによって、本明細書に記載の監視システムによってユーザは知られている診断システムと比較して望ましくない振動振幅を迅速かつ効率的に識別できるようになり、したがって回転コンポーネントの動作効率が向上する。
【0045】
本明細書に記載の方法、システム、および装置の例示的な技術効果は、(a)参照に対して少なくとも1つのセンサから回転装置に結合されたコンポーネントの相対位置を示す1つまたは複数の信号を送信することと、(b)所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算することと、(c)基準面内のコンポーネントの位置を含む複数の軌道位置値を計算することと、(d)計算された時間ベースの位置値に対応する複数の時間ベースのトレースと、計算された軌道位置値に対応する複数の軌道トレースとのうちの少なくとも1つを提示することとのうちの少なくとも1つを含む。
【0046】
回転装置の動作を監視する際に使用するための監視システムおよび方法の例示的実施形態を上記で詳細に説明した。システムおよび方法は、本明細書に記載の特定の実施形態に限定されず、方法のシステムおよび/またはステップのコンポーネントは単独で、ならびに本明細書に記載の他のコンポーネントおよび/またはステップとは別々に利用できる。たとえば、方法は他の回転装置と組み合わせて使用することもでき、本明細書に記載のタービンエンジンシステムだけで実施することに限定されない。むしろ、例示的実施形態は他の多くの回転システムアプリケーションと接続して実装および利用できる。
【0047】
本明細書に記載の実施形態は、本明細書に記載のコンピュータベースおよび/またはコンピュータ装置ベースの動作環境を使用して実行できる。コンピュータまたはコンピューティングデバイスは、1つあるいは複数のプロセッサまたは処理装置、システムメモリ、および任意の形式の持続性コンピュータ可読メディアを含むことができる。例示的な持続性コンピュータ可読メディアには、フラッシュメモリドライブ、ハードディスクドライブ、デジタル多用途ディスク(DVD)、コンパクトディスク(CD)、フロッピー(商標)ディスク、およびテープカセットがある。例を挙げると、これに限定されないが、コンピュータ可読メディアはコンピュータ記憶メディアおよび通信メディアを備える。コンピュータ可読記憶メディアは持続性であり、コンピュータ可読命令、データ構造、プログラムモジュール、または他のデータなどの情報を格納する。通信メディアは一般的に、搬送波または他の転送機構などの変調されたデータ信号内のコンピュータ可読命令、データ構造、プログラムモジュール、または他のデータを実施し、あらゆる情報配信メディアを含む。上記の任意の組合せも、コンピュータ可読メディアの範囲内に含まれる。
【0048】
例示的なコンピューティングシステム環境に関連して説明したが、本発明の実施形態は他の多くの汎用または専用コンピューティングシステム環境または構成で動作可能である。本発明の態様で使用することに適している良く知られたコンピューティングシステム、環境、および/または構成には、これに限定されないが、モバイルコンピューティング装置、パーソナルコンピュータ、サーバコンピュータ、ハンドヘルドまたはラップトップ装置、マルチプロセッサシステム、ゲーム機、マイクロプロセッサベースシステム、セットトップボックス、プログラマブル家電、モバイル電話、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ、上述のシステムまたは装置のうちのいずれかを含む分散コンピューティング環境などがある。
【0049】
本発明の態様は、本明細書に記載の命令を実行するように構成されると、汎用コンピュータを専用コンピューティング装置に変える。本発明の様々な実施形態の特定の特徴が、ある図面には示されており、他の図面には示されていないが、これは便宜上そのようになっているに過ぎない。本発明の原則に従って、ある図面のあらゆる特徴を他の図面のあらゆる特徴と組み合わせて参照および/または主張できる。
【0050】
本明細書は、最良の実施形態を含めて、本発明を開示するために、また当業者が任意の装置またはシステムを作成および使用し、かつ任意の組み込まれる方法を遂行すること含めて本発明を実施できるようにするために、例を使用している。本発明の特許可能な範囲は特許請求の範囲によって定められ、また当業者に考えられる他の例を含み得る。このような他の例は、それらが特許請求の範囲の文字通りの記載から差異のない構造的要素を持つ場合、あるいはそれらが特許請求の範囲の文字通りの記載から実質的に差異のない等価な構造的要素を含む場合、特許請求の範囲内であるものとする。
【0051】
本発明を様々な特定の実施形態に関して説明してきたが、特許請求の趣旨および範囲内で修正を加えて本発明を実施できることが当業者なら理解できよう。
【符号の説明】
【0052】
10 回転装置
12 回転コンポーネント
14 監視システム
16 吸気部分
18 圧縮部分
20 燃焼部分
22 タービン部分
24 排気部分
28 駆動軸
30 中心軸
32 ベアリング
34 燃焼器
36 燃料アセンブリ
38 発電機
40 コンピューティングデバイス
42 センサ
44 近接センサ
46 間隙
48 中心点
50 基準面
52 第1近接センサ
54 第2近接センサ
56 速度センサ
58 プロセッサ
60 メモリ装置
62 プレゼンテーションインターフェース
64 ユーザ
66 入力インターフェース
68 センサインターフェース
70 通信インターフェース
72 グラフィカルインターフェース
100 時間ベースのトレース
102 軌道トレース
104 矢印
106 第1の複数の時間ベースのトレース
108 第2の複数の時間ベースのトレース
110 データディスプレイ
112 セレクタ
114 データ部分
116 グラフィカルスケール
118 区分
120 縦軸
122 横軸
124 第1データ部分
126 第2データ部分
128 第3データ部分
130 第1グラフィカルスケール
132 第2グラフィカルスケール
134 第3グラフィカルスケール
136 直接時間ベースのトレース
138 フィルタリングされた時間ベースのトレース
140 直接軌道トレース
142 フィルタリングされた軌道トレース
144 トレース表示セレクタ
146 フィルタリングセレクタ
148 振幅因子セレクタ
150 時間ベースの因子セレクタ
152 スケーリングセレクタ
154 軌道トレース選択
156 時間ベース選択
158 OTBトレース選択
160 直接トレース選択
162 フィルタリングされたトレース選択
164 直接/フィルタリングされたトレース選択
166 振幅因子
168 期間スケーリング因子
170 区分ごとの選択
172 フルスケール選択
200 方法
202 信号を送信する
204 複数の時間ベースの位置値を計算する
206 複数の軌道位置値を計算する
208 複数の時間ベースのトレースを提示する
210 複数の軌道トレースを提示する
212 時間ベースのトレースおよび軌道トレースを提示する
214 第1の時間ベースの位置値を計算する
216 第2の時間ベースの位置値を計算する
218 第1の複数の時間ベースのトレースを提示する
220 第2の複数の時間ベースのトレースを提示する
【技術分野】
【0001】
本明細書に開示された対象は一般的に監視システムに関し、より具体的には回転装置の動作を監視する際に使用するためのシステムおよび方法に関する。
【背景技術】
【0002】
知られている機械は、動作中に振動や他の挙動を示すことがある。このような挙動を測定して、たとえばモーター駆動軸において示された振動の量、軸の回転位置、および/あるいは機械またはモーターの他の適切な動作特性を決定するためにセンサを使用できる。多くの場合、センサは複数のモニタおよび少なくとも1つのプロセッサを含む監視システムに結合されている。監視システムは、センサから検知した測定値を表す信号を受信して、ユーザによって使用可能な形式で測定値を表示する診断プラットフォームにそれらの測定値を送信する。
【0003】
しかし、少なくともいくつかの知られている診断プラットフォームは、センサから受信した測定値を表示するために利用できる領域が限られている場合がある。したがって、知られている診断システムは、一度に所望の測定データの一部しか技術者またはユーザに表示できない場合がある。このように、技術者またはユーザは、機械内の動作障害および/またはエラーを容易におよび/または迅速に診断できない場合がある。障害および/またはエラーの診断に付随する困難、および/またはその遅延によって、機械に損傷を生じさせることもあり、および/または望ましくないことに一定期間その機械が使えなくなることもある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願公開第2011/0125461号明細書
【発明の概要】
【0005】
一態様では、回転装置の動作を監視する際に使用するためのシステムが提供される。本システムは、少なくとも1つのセンサ、入力装置、表示装置、およびプロセッサを含む。センサは、回転装置に結合されたコンポーネントの位置を検知して、参照に対してコンポーネントの位置を示す信号を生成するように構成されている。入力装置は、ユーザ選択入力を示す信号を生成するように構成されている。プロセッサは、センサ、入力装置、および表示装置と通信するように結合されており、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算するようにプログラムされている。コンポーネントの相対位置に関連付けられる複数の軌道位置値は、プロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【0006】
他の態様では、コンピュータ実行可能命令を実装した1つまたは複数のコンピュータ可読記憶メディアであって、そのコンピュータ実行可能命令が少なくとも1つのプロセッサによって実行されると、少なくとも1つのプロセッサに、参照に対して回転装置に結合されたコンポーネントの位置を示す信号を受信させるコンピュータ可読記憶メディアが提供される。プロセッサは、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値も計算する。コンポーネントの相対位置に関連付けられる複数の軌道位置値がプロセッサによって計算される。プロセッサは、前記入力装置を介するユーザ選択入力に応じて、計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された複数の軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを図で表す。
【0007】
他の態様では、回転装置の動作を監視する方法が提供される。本方法は、参照に対して、少なくとも1つのセンサから回転装置に結合されたコンポーネントの相対位置を示す1つまたは複数の信号を送信するステップを含む。コンピューティングデバイスは、所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算する。基準面内のコンポーネントの位置を含む複数の軌道位置値は、コンピューティングデバイスによって計算される。コンピューティングデバイスは、計算された時間ベースの位置値に対応する複数の時間ベースのトレース、および計算された軌道位置値に対応する複数の軌道トレースのうちの少なくとも1つを表す。
【図面の簡単な説明】
【0008】
【図1】例示的な回転装置の概略図である。
【図2】図1に示される回転装置で使用できる例示的なコンポーネントの断面図である。
【図3】図1に示される回転装置を監視するために使用できる例示的な監視システムのブロック図である。
【図4】図1に示される回転装置の動作を監視する際に使用できる例示的方法の流れ図である。
【図5】図4に示される方法で使用できる例示的なグラフィカルインターフェースである。
【発明を実施するための形態】
【0009】
本明細書に記載の例示的方法およびシステムは、基準面内の回転コンポーネントの検知された振動に対応する複数のトレースを同時に表示する監視システムを提供することによって、少なくともいくつかの知られている診断プラットフォームの少なくともいくつかの欠点を克服する。さらに本明細書に記載の実施形態は、コンポーネントの検知された振動振幅に対応する複数のトレースを図で表すコンピューティングデバイスを含み、ユーザが複数の測定スケール因子から選択することによってトレースのサイズおよび形を調整できるようにする。本明細書に記載の監視システムは、回転コンポーネントの振動振幅に対応する複数のトレースを表示することによって、ユーザが知られている診断システムと比較して望ましくない振動振幅を迅速かつ効率的に識別できるようにする。その結果、回転コンポーネントの動作効率の向上が促進される。
【0010】
図1は、例示的な回転装置10の概略図である。図2は、回転装置10で使用できる例示的な回転コンポーネント12の断面図である。回転装置10の動作中、回転コンポーネント12の相対位置が知られていることが望ましい。図3は、回転装置10を監視するために使用できる例示的な監視システム14のブロック図である。
【0011】
例示的実施形態では、回転装置10はタービンエンジンシステムである。あるいは、回転装置10はスチームタービンエンジン、ポンプ、モーター、または回転コンポーネントを含む他の任意のシステムでもよい。例示的実施形態では、タービンエンジンシステム10は、吸気部分16、吸気部分16の下流に結合された圧縮部分18、圧縮部分18の下流に結合された燃焼部分20、燃焼部分20の下流に結合されたタービン部分22、および排気部分24を含む。駆動軸28は、中心軸30に沿ってタービン部分22と圧縮部分18との間に拡張する。さらに、タービンエンジンシステム10は、駆動軸28を支持するために、少なくとも1つのベアリング32などの少なくとも1つの支持要素も含む。燃焼部分20は複数の燃焼器34を含む。燃焼部分20は、それぞれの燃焼器34が圧縮部分18と流体連通できるように圧縮部分18に結合されている。
【0012】
燃料アセンブリ36は、燃料の流れを燃焼器34に提供するためにそれぞれの燃焼器34に結合されている。タービン部分22は、タービンエンジンシステム10の動作中に発電機38に電力負荷を与えるために、駆動軸28で圧縮部分18および発電機38に回転自在に結合されている。発電機38は、ユーティリティグリッドに電力を供給するために、たとえば電気ユーティリティグリッド(図示せず)などの電源に結合されている。あるいは、回転装置10は他の構成を有して、他のタイプのコンポーネントを使用してもよい。たとえば、回転装置10は複数のガスタービンエンジン、他のタイプのタービン、および/または他のタイプの発電装置を含んでもよい。
【0013】
例示的実施形態では、監視システム14は、複数のセンサ42と通信するように結合されたコンピューティングデバイス40を含む。それぞれのセンサ42は、タービンエンジンシステム10の動作および環境状態に関する様々なパラメータを検知する。センサ42は、振動センサ、位置センサ、温度センサ、加速センサ、速度センサ、流圧センサ、電力負荷センサ、および/またはタービンエンジンシステム10の動作に関する様々なパラメータを検知する他の任意のセンサを含むことができるが、それらだけに限定されない。本明細書で使用されるように、「パラメータ」という用語は、定められた位置での温度、流圧、電力負荷、振動、回転速度、および流量など、その値がタービンエンジンシステム10の動作および環境状態を定義するために使用できる物理的プロパティを指す。
【0014】
例示的実施形態では、監視システム14は、コンポーネント12の振動および/または位置を検知するために、たとえば圧縮部分18、タービン部分22、および/または駆動軸28などの、タービンエンジンシステム10のコンポーネント12の近傍に、または隣接して位置する少なくとも1つの近接センサ44を含む。近接センサ44はコンピューティングデバイス40と通信できるように結合されており、近接センサ44に対するコンポーネント12の位置を検知して、検知した位置をコンピューティングデバイス40に送信するように構成されている。一実施形態では、近接センサ44は、ベアリング32に対する駆動軸28の振動および/または位置を検知するために、駆動軸28に隣接して、およびベアリング32の近傍にまたは隣接して位置する。他の実施形態では、近接センサ44は、コンポーネント12の位置および/または振動を示す信号を生成するために渦電流を生成する。さらに、近接センサ44は、駆動軸28と近接センサ44との間の間隙またはスペースなどの、回転機械コンポーネント12間の間隙46またはスペースを示す信号を生成するために渦電流を生成する。
【0015】
例示的実施形態では、駆動軸28に関する3次元のデカルト座標系を定義するために、3つの直交軸X、Y、およびZが使用されている。具体的には、Z軸はコンポーネント12の中心点48を通じて実質的に同軸で拡張するように配置され、X軸およびY軸はタービンエンジンシステム10内に基準面50を形成するように交差している。例示的実施形態では、監視システム14は、Y軸に対するコンポーネント12の位置を検知する際に使用するための、および検知した位置をコンピューティングデバイス40に送信するための、Y軸に沿ってコンポーネント12に隣接して位置する第1近接センサ52を含む。監視システム14は、X軸に対するコンポーネント12の位置を検知する際に使用するための、および検知した位置を示す信号をコンピューティングデバイス40に送信するための、X軸に沿ってコンポーネント12に隣接して位置する第2近接センサ54も含む。
【0016】
さらに、例示的実施形態では、監視システム14は、コンポーネント12の回転速度および/または回転周波数を検知する際に使用するための、および検知した回転速度および/または検知した回転周波数を示す信号をコンピューティングデバイス40に送信するための、少なくとも1つの速度センサ56を含む。より具体的には、コンポーネント12のそれぞれの回転中にマークまたはノッチ(図示せず)が速度センサ56を超えて回転すると、それぞれの速度センサ56は、コンポーネント12上に、所定のマーク、あるいは磁気ストライプまたはコンポーネント12からの異なる物質、あるいはノッチなどの目印を検出する。他の増分回転/時間目印±90°、±180°などがあってよい。例示的実施形態では、速度センサ56は、コンポーネント12の回転周波数を計算または決定する際に使用するために、マークまたはノッチの検出を表す信号をコンピューティングデバイス40に送信する。
【0017】
例示的実施形態では、コンピューティングデバイス40は、プログラムされた命令を実行するためにメモリ装置60と通信するように結合されたプロセッサ58を含む。いくつかの実施形態では、実行可能命令はメモリ装置60に格納される。あるいは、実行可能命令はコンピュータネットワークを介して他の装置から取得されてもよい。例示的実施形態では、コンピューティングデバイス40は、プログラミングプロセッサ58によって本明細書に記載の1つまたは複数の動作を実行するようにプログラム可能である。たとえば、プロセッサ58は、動作を1つまたは複数の実行可能命令として符号化して、その実行可能命令をメモリ装置60内に提供することによってプログラムできる。プロセッサ58は1つまたは複数の処理装置を含むことができる(たとえばマルチコア構成で)。
【0018】
プロセッサ58は、汎用中央処理装置(CPU)、グラフィック処理装置(GPU)、マイクロコントローラ、縮小命令セットコンピュータ(RISC)プロセッサ、特定用途向け集積回路(ASIC)、プログラマブル論理回路(PLC)、および/あるいは本明細書に記載の機能を実行できる他の回路またはプロセッサを含むことができるが、それらに限定されない。本明細書に記載の方法は、これに限定されないが記憶装置および/またはメモリ装置を含む、持続性コンピュータ可読メディアで実施される実行可能命令として符号化できる。プロセッサによって実行されると、このような命令は本明細書に記載の方法の少なくとも一部をプロセッサに実行させる。上記の例は例示的なものに過ぎず、プロセッサという用語を定義および/または意味を限定することを意図するものでは決してない。
【0019】
例示的実施形態では、メモリ装置60は、実行可能命令および/または他のデータなどの情報を選択的に格納および取得できるようにする1つまたは複数の装置である。メモリ装置60は、ダイナミックランダムアクセスメモリ(DRAM)、スタティックランダムアクセスメモリ(SRAM)、ソリッドステートディスク、および/またはハードディスクなどの1つまたは複数のコンピュータ可読メディアを含むことができるが、それらに限定されない。メモリ装置60は、これに限定されないが、実行可能命令および/または本明細書に記載の方法で使用することに適した他の任意のタイプのデータを格納するように構成され得る。
【0020】
例示的実施形態では、コンピューティングデバイス40は、プロセッサ58に結合されたプレゼンテーションインターフェース62を含む。プレゼンテーションインターフェース62は、これに限定されないが、コンポーネント12の検知された振動振幅に対応する複数のトレースなどの情報をユーザ64に出力(たとえば、表示、印刷、および/またはその他の出力)するように構成されている。たとえば、プレゼンテーションインターフェース62は、ブラウン管(CRT)、液晶ディスプレイ(LCD)、有機LED(OLED)ディスプレイ、および/または「電子インク」ディスプレイなどの表示装置に結合されたディスプレイアダプタ(図示せず)を含むことができる。いくつかの実施形態では、プレゼンテーションインターフェース62は複数の表示装置を含む。
【0021】
コンピューティングデバイス40は、ユーザ64から入力を受信する入力インターフェース66も含む。入力インターフェース66は、構成データ(たとえばディスプレイ上に提示されるトレースの倍率を増減させるためのスケール因子)の選択またはエントリ、および/または本明細書に記載の方法およびシステムで使用することに適した他の任意の情報を受信するように構成され得る。
【0022】
例示的実施形態では、入力インターフェース66は、たとえばキーボード、ポインティングデバイス、マウス、スタイラス、タッチパネル(たとえばタッチパッドまたはタッチスクリーン)、ジャイロスコープ、加速度計、位置検出器、トグルスイッチ、セレクタダイヤル、および/または音声入力インターフェースを含むことができ、プロセッサ58に結合される。タッチスクリーンなどの単一のコンポーネントは、プレゼンテーションインターフェース62の表示装置、および入力インターフェース66の両方として機能できる。
【0023】
さらに、コンピューティングデバイス40は、少なくとも1つのセンサ42に結合されたセンサインターフェース68を含む。それぞれのセンサ42は、コンポーネント12の検知された動作パラメータに対応する信号を送信する。それぞれのセンサ42は信号を連続的、定期的、または一度だけ、および/あるいはコンピューティングデバイス40が本明細書に記載されるように機能できるようにする他の任意の信号タイミングで送信できる。さらに、それぞれのセンサ42は信号をアナログ形式でもデジタル形式でも送信できる。
【0024】
コンピューティングデバイス40は、プロセッサ58に結合された通信インターフェース70を含むことができる。通信インターフェース70は、他のコンピューティングデバイス40などの遠隔装置と通信するように結合されている。たとえば、通信インターフェース70は、有線ネットワークアダプタ、無線ネットワークアダプタ、および/またはモバイル遠隔通信アダプタを含むことができるが、それらに限定されない。他の任意の装置もコンピューティングデバイス40に対して遠隔にあると考えることができる。たとえば、コンピューティングデバイス40が通信インターフェース70を介して通信する(たとえば、共有メモリ装置60を介して通信することとは対照的に)他の任意のコンピューティングデバイス40も遠隔にあると考えることができる。あるいは、コンピューティングデバイス40からの所定の距離よりも離れた場所にある場合、その装置は遠隔にあると考えることができる。所定の距離は、たとえば、地理の観点(たとえば10メートル、100メートル、または1キロメートル)、および/またはネットワークトポロジの観点(たとえば1ネットワークリンク、2ネットワークリンク、または5ネットワークリンク離れている)から表すことができる。
【0025】
例示的実施形態では、コンピューティングデバイス40は、コンポーネント12の振幅を計算する際、および/または計算されたコンポーネント振動に対応するトレースを表示する際に使用するデータをメモリ装置60に格納する、および/または通信インターフェース70を介して(たとえば他のコンピューティングデバイス40から)それらのデータにアクセスするように動作可能である。
【0026】
動作中、吸気部分16は圧縮部分18に向けて空気を流す。圧縮部分18は流入空気を高圧および高温に圧縮して、圧縮された空気を燃焼部分20に排出する。燃料は燃料アセンブリ36からそれぞれの燃焼器34に流され、そこで燃料が圧縮された空気と混ざって燃焼部分20で点火される。燃焼部分20は燃焼ガスをタービン部分22に流し、そこで熱エネルギーが圧縮部分18および/または発電機38を駆動するための機械回転エネルギーに変換される。排気ガスはタービン部分22から出て、排気部分24を通って大気に流れる。近接センサ52および54は、コンポーネント12の基準面50に対する位置および/または振動を検知して、検知した位置および/または振動を示す信号をコンピューティングデバイス40に送信する。コンピューティングデバイス40は、所定の期間について、所定の軸に沿ったコンポーネント12の位置を含む複数の時間ベースの位置値を計算する。より具体的には、コンピューティングデバイス40は、所定の期間について、Y軸に沿ったコンポーネント12の位置を含む複数の第1の時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、所定の期間について、X軸に沿ったコンポーネント12の位置を含む複数の第2の時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、基準面50内のコンポーネント中心点48の位置を含む複数の軌道位置値を計算する。
【0027】
例示的実施形態では、コンピューティングデバイス40は、プレゼンテーションインターフェース62を介して、計算された時間ベースの位置値に対応する複数の時間ベースのトレースを図で表す。さらに、コンピューティングデバイス40は、計算された軌道位置値に対応する複数の軌道トレースを図で表す。例示的実施形態では、コンピューティングデバイス40は、コンピューティングデバイス40へのユーザ選択入力に応じて複数の時間ベースのトレースおよび/または複数の軌道トレースを選択的に提示する。
【0028】
図4は、回転装置10(図1に示される)の動作を監視する際に使用できる例示的方法200の流れ図である。方法200の一部は、コンピューティングデバイス40のいずれか1つ、または任意の組合せによって実行され得る(図1に示される)。図5は、回転装置10の動作を監視するために使用できる例示的なグラフィカルインターフェース72である。例示的実施形態では、グラフィカルインターフェース72はコンピューティングデバイス40によって提示され(たとえば、図3に示されるプレゼンテーションインターフェース62を介して)、入力インターフェース66(図3に示される)を介して入力(たとえば、選択および/またはエントリ)を受信できる。一実施形態では、本明細書に記載の選択のうちの1つまたは複数は、通信インターフェース70(図3に示される)を介して受信される。たとえば、選択は遠隔コンピューティングデバイス40の入力インターフェース66を介して受信でき、遠隔コンピューティングデバイス40の通信インターフェース70によって送信できる。
【0029】
例示的実施形態では、方法200は、近接センサ44からコンピューティングデバイス40に、基準面50に対するコンポーネント12の位置を示す信号を送信するステップ202を含む。コンピューティングデバイス40は、受信した信号に少なくとも部分的に基づいて、所定の期間について、所定の軸に沿ったコンポーネント12の振動振幅を含む、複数の時間ベースの位置値を計算する(204)。コンピューティングデバイス40は、基準面50内のコンポーネント12の中心点48の位置を含む、複数の軌道位置値も計算する(206)。例示的実施形態では、コンピューティングデバイス40は、計算された時間ベースの位置値に対応する、および所定の軸に沿ったコンポーネント12の振動振幅を表す、複数の時間ベースのトレース100を提示する(208)。さらに、コンピューティングデバイス40は、計算された軌道位置値に対応する、およびX軸およびY軸に沿った基準面50内の中心点48の位置を表す、複数の軌道トレース102を提示する(210)。さらに、コンピューティングデバイス40は、コンピューティングデバイス40へのユーザ選択入力に応じて、時間ベースのトレース100、軌道トレース102、または時間ベースのトレース100および軌道トレース102の両方を選択的に提示する(212)。一実施形態では、コンピューティングデバイス40は、コンポーネント12の回転方向を示す、軌道トレース102に隣接する矢印104を表示する。
【0030】
方法200は、Y軸に沿ったコンポーネント12の位置を含む、第1の複数の時間ベースの位置値を計算するステップ(214)、およびX軸に沿ったコンポーネント12の位置を含む、第2の複数の時間ベースの位置値を計算するステップ(216)も含む。さらに、コンピューティングデバイス40は、所定の期間について、計算された第1の複数の時間ベースの位置値に対応する、およびY軸に沿ったコンポーネント12の振動振幅を表す、第1の複数の時間ベースのトレース106を提示する(218)。さらに、コンピューティングデバイス40は、所定の期間について、計算された第2の時間ベースの位置値に対応する、およびX軸に沿ったコンポーネント12の振動振幅を表す、第2の複数の時間ベースのトレース108を提示する(220)。
【0031】
例示的実施形態では、コンピューティングデバイス40はグラフィカルインターフェース72にデータディスプレイ110および複数のセレクタ112を提示する。それぞれのセレクタ112は、データディスプレイ110内に提示される時間ベースのトレース100および軌道トレース102を可変的に選択および調整できるようにするために、ユーザ選択入力を受信するように構成されている。さらに、データディスプレイ110は、時間ベースのトレース100および軌道トレース102を表示する複数のデータ部分114を含む。それぞれのデータ部分114は、縦軸120に沿って、および横軸122に沿って配置された、複数の区分118に分割されたグラフィカルスケール116を含む。
【0032】
例示的実施形態では、データディスプレイ110は、第1データ部分124、第2データ部分126、および第3データ部分128を含む。第1データ部分124は第1グラフィカルスケール130に関する第1の時間ベースのトレース106を提示しており、縦軸120に沿ってY軸に関するコンポーネントの振動振幅を表示して、横軸122に沿って時間を表示している。第2データ部分126は軌道トレース102を提示しており、縦軸120に沿ってY軸に関するコンポーネントの振動振幅を表示して、横軸122に沿ってX軸に関するコンポーネントの振動振幅を表示する、第2グラフィカルスケール132を含む。第3データ部分128は、第3グラフィカルスケール134に関する第2の時間ベースのトレース108を提示しており、縦軸120に沿ってX軸に関するコンポーネントの振動振幅を表示して、横軸122に沿って時間を表示している。例示的実施形態では、第2データ部分126は、縦軸120に沿って第1データ部分124と第3データ部分128との間にあるので、第1の時間ベースのトレース106と第2の時間ベースのトレース108との間に軌道トレース102が表示される。さらに、例示的実施形態では、第1グラフィカルスケール130のスケール単位は、第2グラフィカルスケール132および第3グラフィカルスケール134のスケール単位とほぼ等しいので、第1の時間ベースのトレース106は第2の時間ベースのトレース108および軌道トレース102に対応して、ユーザが第1の時間ベースのトレース106および第2の時間ベースのトレース108、ならびに軌道トレース102を視覚的に比較して、コンポーネント12を監視できるようにする。
【0033】
例示的実施形態では、方法200は、複数の所定のスケール振幅因子を含む時間ベースの位置値および軌道位置値を計算するステップを含む。コンピューティングデバイス40は、ユーザ選択入力に応じて、所定のスケール振幅因子に対応する時間ベースのトレース100および軌道トレース102を選択的に提示する。さらに、コンピューティングデバイス40は、1、2、5、および10の倍数の振幅などの、スケール振幅因子に対応する時間ベースのトレース100および軌道トレース102を選択的に提示する。
【0034】
方法200は、複数の所定のスケール期間を含む時間ベースの位置値を計算するステップも含む。コンピューティングデバイス40は、ユーザ選択入力に応じて所定のスケール期間に対応する第1の時間ベースのトレース106および第2の時間ベースのトレース108を選択的に提示する。さらに、コンピューティングデバイス40は、1、2、5、および10の倍数の期間などの、スケール期間に対応する第1の時間ベースのトレース106および第2の時間ベースのトレース108を選択的に提示する。
【0035】
例示的実施形態では、それぞれの区分118は、振動振幅単位および/または時間単位などの所定の測定単位に対応する。コンピューティングデバイス40は、ユーザ選択入力に応じて、それぞれの区分118によって定義された測定単位の量を選択的に調整することによって、時間ベースのトレース100および軌道トレース102のサイズおよび形を調整する。さらに、グラフィカルスケール116内のそれぞれの軸120および122は、所定の測定単位の量を含む。コンピューティングデバイス40は、ユーザ選択入力に応じて、それぞれの軸120および122によって定義された測定単位の量を選択的に調整することによって、時間ベースのトレース100および軌道トレース102のサイズおよび形も調整する。
【0036】
例示的実施形態では、方法200は、速度センサ56からコンピューティングデバイス40に、回転装置10および/またはコンポーネント12の回転周波数を示す信号を送信するステップも含む。コンピューティングデバイス40は、検知された回転周波数に少なくとも部分的に基づいて、複数のフィルタリングされた時間ベースの位置値を計算する。さらに、コンピューティングデバイス40は、検知された回転周波数に基づいて、複数のフィルタリングされた軌道位置値を計算する。より具体的には、コンピューティングデバイス40は、たとえばコンポーネント12の検知された回転周波数についての中心周波数とともにバンドパスフィルタ(図示せず)を使用して、フィルタリングされた時間ベースの位置値および軌道位置値を計算する。このように、例示的実施形態では、フィルタはセンサ52および54から受信した信号から望ましくない周波数コンポーネントを除去するので、それぞれのコンポーネント12の振動の振幅を分離することもでき、および/またはより容易に見られるようにすることもできる。あるいは、フィルタはローパスフィルタ、ハイパスフィルタ、または監視システム14が本明細書に記載されるように機能できるようにする他の任意のフィルタでよい。
【0037】
例示的実施形態では、コンピューティングデバイス40は、フィルタリングされていない時間ベースの位置値に対応する複数の直接時間ベースのトレース136、および計算されたフィルタリングされた時間ベースの位置値に対応する複数のフィルタリングされた時間ベースのトレース138を選択的に提示する。同様に、コンピューティングデバイス40は、フィルタリングされていない軌道位置値に対応する複数の直接軌道トレース140、および計算されたフィルタリングされた軌道位置値に対応する複数のフィルタリングされた軌道トレース142を選択的に提示する。例示的実施形態では、コンピューティングデバイス40は、ユーザ選択入力に応じて、フィルタリングされた時間ベースのトレース138および/または直接時間ベースのトレース136を選択的に提示する。さらに、コンピューティングデバイス40は、縦軸120に沿って直接時間ベースのトレース136に隣接するフィルタリングされた時間ベースのトレース138を提示する。コンピューティングデバイス40は、ユーザ選択入力に応じて、フィルタリングされた軌道トレース142および/または直接軌道トレース140も選択的に提示する。さらに、コンピューティングデバイス40は、横軸122に沿ってフィルタリングされた軌道トレース142に隣接する直接軌道トレース140を提示する。
【0038】
例示的実施形態では、グラフィカルインターフェース72は、トレース表示セレクタ144、フィルタリングセレクタ146、振幅因子セレクタ148、時間ベースの因子セレクタ150、およびスケーリングセレクタ152を含む。トレース表示セレクタ144は、データディスプレイ110内に表示されるべきトレースをユーザが選択できるように構成されている。トレース表示セレクタ144は、軌道トレース選択154、時間ベース選択156、および軌道/時間ベース(OTB)トレース選択158を含む。コンピューティングデバイス40は、軌道トレース選択154、時間ベース選択156、またはOTBトレース選択158に対応するユーザ選択入力に応じて、時間ベースのトレース100および/または軌道トレース102を選択的に提示する。例示的実施形態では、コンピューティングデバイス40は、軌道トレース選択154のユーザ選択に応じて軌道トレース102を提示する。さらに、コンピューティングデバイス40は、時間ベース選択156の選択に応じて時間ベースのトレース100を提示して、OTBトレース選択158の選択に応じて時間ベースのトレース100と軌道トレース102の両方を提示する。
【0039】
フィルタリングセレクタ146は、直接時間ベースのトレース136および直接軌道トレース140、あるいは/またはフィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142をユーザが選択的に提示できるように構成されている。フィルタリングセレクタ146は、直接トレース選択160、フィルタリングされたトレース選択162、および直接/フィルタリングされたトレース選択164を含む。コンピューティングデバイス40は、直接トレース選択160のユーザ選択に応じて、直接時間ベースのトレース136および直接軌道トレース140を提示して、フィルタリングされたトレース選択162のユーザ選択に応じて、フィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142を提示する。さらに、コンピューティングデバイス40は、直接/フィルタリングされたトレース選択164のユーザ選択に応じて、直接時間ベースのトレース136および直接軌道トレース140と、フィルタリングされた時間ベースのトレース138およびフィルタリングされた軌道トレース142との両方を提示する。
【0040】
振幅因子セレクタ148によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義された測定単位を調整することによって時間ベースのトレース100および軌道トレース102のサイズおよび形を調整できるようになる。振幅因子セレクタ148は、グラフィカルスケール116またはそれぞれの区分118によって定義された振幅単位に対応する複数の振幅因子166を含む。コンピューティングデバイス40は、選択された振幅因子に対応する時間ベースのトレース100および軌道トレース102を提示する。例示的実施形態では、振幅因子セレクタ148は、1、2、5、および10の倍数のスケール単位を含む振幅因子を含む。あるいは、振幅因子セレクタ148は、監視システム14が本明細書に記載されるように機能できるようにするために、任意の適切な数のスケーリング因子を含むことができる。
【0041】
時間ベースの因子セレクタ150によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義された期間を調整することによって時間ベースのトレース100のサイズおよび形を調整できるようになる。時間ベースの因子セレクタ150は、1、2、5、および10の倍数のスケール単位を含む複数の期間スケーリング因子168を含む。あるいは、時間ベースの因子セレクタ150は、監視システム14が本明細書に記載されるように機能できるようにするために、他の適切な数のスケーリング因子を含むことができる。例示的実施形態では、コンピューティングデバイス40は、選択された期間スケーリング因子に対応するようにグラフィカルスケール116またはそれぞれの区分18によって定義された期間を調整することによって、選択された期間振幅因子に対応する時間ベースのトレース100を選択的に提示する。
【0042】
スケーリングセレクタ152によって、ユーザはグラフィカルスケール116またはそれぞれの区分118によって定義されたスケールを調整できるようになる。スケーリングセレクタ152は、区分ごとの選択170およびフルスケール選択172を含む。コンピューティングデバイス40は、区分ごとの選択170のユーザ選択に応じてそれぞれの区分118によって定義された測定単位の量を調整する。より具体的には、区分ごとの選択170を選択した後、振幅因子166および期間スケーリング因子168がそれぞれの区分118によって定義された測定単位の量を調整する。さらに、フルスケール選択172を選択した後、振幅因子166および期間スケーリング因子168がグラフィカルスケール116によって定義された測定単位の総数を調整する。
【0043】
ユーザがX軸およびY軸に沿ったコンポーネント12の検知された振動振幅を相互に関連付けて、コンポーネント12内の望ましくない振動振幅を迅速かつ効率的に識別できるようにするために、データディスプレイ110内の時間ベースのトレース100および軌道トレース102の配置および位置が選択される。さらに、監視システム14によって、ユーザは時間ベースのトレース100および軌道トレース102の振幅および期間を調整することによって時間ベースのトレース100および軌道トレース102のサイズおよび形を調整できるようになる。時間ベースのトレース100および軌道トレース102を選択的に提示することによって、監視システムによってユーザは望ましくない振動振幅を識別できるようになるので、ユーザは修正措置を取ってコンポーネント12および/または回転装置10に損傷が生じるのを減らすことができる。
【0044】
上述のシステムおよび方法は、基準面内の回転コンポーネントの検知された振動振幅に対応する複数のトレースを選択的に提示できるようにする監視システムを提供することによって、知られている診断プラットフォームの少なくともいくつかの欠点を克服する。さらに本明細書に記載の実施形態は、X軸およびY軸に沿った回転コンポーネントの位置を検知して、検知された振動振幅に対応する複数のトレースをデカルト座標系内に図で表す監視システムを提供する。さらに、監視システムによって、ユーザは複数のスケール因子から選択することによってトレースのサイズおよび形を選択的に調整して、表示されたトレースに対応するスケール振幅およびスケール期間を調整できるようになる。回転コンポーネントの振動振幅に対応する複数のトレースを表示することによって、本明細書に記載の監視システムによってユーザは知られている診断システムと比較して望ましくない振動振幅を迅速かつ効率的に識別できるようになり、したがって回転コンポーネントの動作効率が向上する。
【0045】
本明細書に記載の方法、システム、および装置の例示的な技術効果は、(a)参照に対して少なくとも1つのセンサから回転装置に結合されたコンポーネントの相対位置を示す1つまたは複数の信号を送信することと、(b)所定の期間について、コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算することと、(c)基準面内のコンポーネントの位置を含む複数の軌道位置値を計算することと、(d)計算された時間ベースの位置値に対応する複数の時間ベースのトレースと、計算された軌道位置値に対応する複数の軌道トレースとのうちの少なくとも1つを提示することとのうちの少なくとも1つを含む。
【0046】
回転装置の動作を監視する際に使用するための監視システムおよび方法の例示的実施形態を上記で詳細に説明した。システムおよび方法は、本明細書に記載の特定の実施形態に限定されず、方法のシステムおよび/またはステップのコンポーネントは単独で、ならびに本明細書に記載の他のコンポーネントおよび/またはステップとは別々に利用できる。たとえば、方法は他の回転装置と組み合わせて使用することもでき、本明細書に記載のタービンエンジンシステムだけで実施することに限定されない。むしろ、例示的実施形態は他の多くの回転システムアプリケーションと接続して実装および利用できる。
【0047】
本明細書に記載の実施形態は、本明細書に記載のコンピュータベースおよび/またはコンピュータ装置ベースの動作環境を使用して実行できる。コンピュータまたはコンピューティングデバイスは、1つあるいは複数のプロセッサまたは処理装置、システムメモリ、および任意の形式の持続性コンピュータ可読メディアを含むことができる。例示的な持続性コンピュータ可読メディアには、フラッシュメモリドライブ、ハードディスクドライブ、デジタル多用途ディスク(DVD)、コンパクトディスク(CD)、フロッピー(商標)ディスク、およびテープカセットがある。例を挙げると、これに限定されないが、コンピュータ可読メディアはコンピュータ記憶メディアおよび通信メディアを備える。コンピュータ可読記憶メディアは持続性であり、コンピュータ可読命令、データ構造、プログラムモジュール、または他のデータなどの情報を格納する。通信メディアは一般的に、搬送波または他の転送機構などの変調されたデータ信号内のコンピュータ可読命令、データ構造、プログラムモジュール、または他のデータを実施し、あらゆる情報配信メディアを含む。上記の任意の組合せも、コンピュータ可読メディアの範囲内に含まれる。
【0048】
例示的なコンピューティングシステム環境に関連して説明したが、本発明の実施形態は他の多くの汎用または専用コンピューティングシステム環境または構成で動作可能である。本発明の態様で使用することに適している良く知られたコンピューティングシステム、環境、および/または構成には、これに限定されないが、モバイルコンピューティング装置、パーソナルコンピュータ、サーバコンピュータ、ハンドヘルドまたはラップトップ装置、マルチプロセッサシステム、ゲーム機、マイクロプロセッサベースシステム、セットトップボックス、プログラマブル家電、モバイル電話、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ、上述のシステムまたは装置のうちのいずれかを含む分散コンピューティング環境などがある。
【0049】
本発明の態様は、本明細書に記載の命令を実行するように構成されると、汎用コンピュータを専用コンピューティング装置に変える。本発明の様々な実施形態の特定の特徴が、ある図面には示されており、他の図面には示されていないが、これは便宜上そのようになっているに過ぎない。本発明の原則に従って、ある図面のあらゆる特徴を他の図面のあらゆる特徴と組み合わせて参照および/または主張できる。
【0050】
本明細書は、最良の実施形態を含めて、本発明を開示するために、また当業者が任意の装置またはシステムを作成および使用し、かつ任意の組み込まれる方法を遂行すること含めて本発明を実施できるようにするために、例を使用している。本発明の特許可能な範囲は特許請求の範囲によって定められ、また当業者に考えられる他の例を含み得る。このような他の例は、それらが特許請求の範囲の文字通りの記載から差異のない構造的要素を持つ場合、あるいはそれらが特許請求の範囲の文字通りの記載から実質的に差異のない等価な構造的要素を含む場合、特許請求の範囲内であるものとする。
【0051】
本発明を様々な特定の実施形態に関して説明してきたが、特許請求の趣旨および範囲内で修正を加えて本発明を実施できることが当業者なら理解できよう。
【符号の説明】
【0052】
10 回転装置
12 回転コンポーネント
14 監視システム
16 吸気部分
18 圧縮部分
20 燃焼部分
22 タービン部分
24 排気部分
28 駆動軸
30 中心軸
32 ベアリング
34 燃焼器
36 燃料アセンブリ
38 発電機
40 コンピューティングデバイス
42 センサ
44 近接センサ
46 間隙
48 中心点
50 基準面
52 第1近接センサ
54 第2近接センサ
56 速度センサ
58 プロセッサ
60 メモリ装置
62 プレゼンテーションインターフェース
64 ユーザ
66 入力インターフェース
68 センサインターフェース
70 通信インターフェース
72 グラフィカルインターフェース
100 時間ベースのトレース
102 軌道トレース
104 矢印
106 第1の複数の時間ベースのトレース
108 第2の複数の時間ベースのトレース
110 データディスプレイ
112 セレクタ
114 データ部分
116 グラフィカルスケール
118 区分
120 縦軸
122 横軸
124 第1データ部分
126 第2データ部分
128 第3データ部分
130 第1グラフィカルスケール
132 第2グラフィカルスケール
134 第3グラフィカルスケール
136 直接時間ベースのトレース
138 フィルタリングされた時間ベースのトレース
140 直接軌道トレース
142 フィルタリングされた軌道トレース
144 トレース表示セレクタ
146 フィルタリングセレクタ
148 振幅因子セレクタ
150 時間ベースの因子セレクタ
152 スケーリングセレクタ
154 軌道トレース選択
156 時間ベース選択
158 OTBトレース選択
160 直接トレース選択
162 フィルタリングされたトレース選択
164 直接/フィルタリングされたトレース選択
166 振幅因子
168 期間スケーリング因子
170 区分ごとの選択
172 フルスケール選択
200 方法
202 信号を送信する
204 複数の時間ベースの位置値を計算する
206 複数の軌道位置値を計算する
208 複数の時間ベースのトレースを提示する
210 複数の軌道トレースを提示する
212 時間ベースのトレースおよび軌道トレースを提示する
214 第1の時間ベースの位置値を計算する
216 第2の時間ベースの位置値を計算する
218 第1の複数の時間ベースのトレースを提示する
220 第2の複数の時間ベースのトレースを提示する
【特許請求の範囲】
【請求項1】
回転装置(10)に結合されたコンポーネント(12)の相対位置を検知して、参照に対して前記コンポーネントの前記位置を示す信号を生成するように構成された少なくとも1つのセンサ(44)と、
ユーザ選択入力を示す信号を生成するように構成された入力装置(66)と、
表示装置(62)と、
前記少なくとも1つのセンサ、前記入力装置、および前記表示装置と通信するように結合されたプロセッサ(58)であって、
所定の期間について、前記コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算して、
前記コンポーネントの相対位置に関連付けられる複数の軌道位置値を計算して、
前記入力装置を介するユーザ選択入力に応じて、前記計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース(100)、および前記計算された複数の軌道位置値に対応する複数の軌道トレース(102)のうちの少なくとも1つを図で表すようにプログラムされたプロセッサとを備える、前記回転装置の動作を監視する際に使用するためのシステム(14)。
【請求項2】
前記プロセッサ(58)が、
所定の測定単位の量を含むグラフィカルスケール(116)に関して前記複数の時間ベースのトレース(100)および前記複数の軌道トレース(102)を提示して、
前記時間ベースのトレースの形および前記軌道トレースの形を選択的に調整するために、ユーザ選択に応じて前記グラフィカルスケール内の測定単位の前記量を調整する
ようにさらにプログラムされる、請求項1記載のシステム(14)。
【請求項3】
Y軸に沿った前記コンポーネント(12)の位置を検知するように構成された第1センサ(52)と、
X軸に沿った前記コンポーネントの位置を検知するように構成された第2センサ(54)とをさらに備える、請求項1記載のシステム(14)。
【請求項4】
前記プロセッサ(58)が、
所定の期間について、前記Y軸に沿った前記コンポーネント(12)の相対位置を含む第1の複数の時間ベースの位置値を計算して、
前記所定の期間について、前記X軸に沿った前記コンポーネントの相対位置を含む第2の複数の時間ベースの位置値を計算して、
前記計算された第1の複数の時間ベースの位置値に対応する第1の時間ベースのトレース(106)、および前記計算された第2の複数の時間ベースの位置値に対応する第2の時間ベースのトレース(108)を図で表すようにさらにプログラムされる、請求項3記載のシステム(14)。
【請求項5】
前記プロセッサ(58)が、
複数の所定のスケール振幅因子で、前記複数の時間ベースの位置値および前記複数の軌道位置値を計算して、
ユーザ選択に応じて所定のスケール振幅因子に対応する前記時間ベースおよび軌道のトレース(100、102)を選択的に提示するようにさらにプログラムされる、請求項1記載のシステム(14)。
【請求項6】
前記プロセッサ(58)が、
複数の所定の期間を含む前記複数の時間ベースの位置値を計算して、
ユーザ選択に応じて所定の期間で前記計算された時間ベースの位置値に対応する前記時間ベースのトレース(100)を選択的に提示するようにさらにプログラムされる、請求項5記載のシステム(14)。
【請求項7】
前記回転装置(10)の回転周波数を検知して、前記検知された回転周波数を示す信号を生成するように構成された第2センサ(56)をさらに備え、前記プロセッサ(58)が前記第2センサと通信するように結合され、前記プロセッサが、
前記受信信号に少なくとも部分的に基づいてフィルタリングされた時間ベースの位置値を計算して、
ユーザ選択に応じて前記計算されたフィルタリングされた時間ベースの位置値に対応するフィルタリングされた時間ベースのトレース(138)を提示するようにプログラムされる、請求項1記載のシステム(14)。
【請求項8】
コンピュータ実行可能命令を実装した1つまたは複数のコンピュータ可読記憶メディアであって、前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
参照に対して回転装置(10)に結合されたコンポーネント(12)の位置を示す信号を受信させて、
所定の期間について、前記コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算させて、
前記コンポーネントの相対位置に関連付けられる複数の軌道位置値を計算させて、
前記入力装置(66)を介するユーザ選択入力に応じて、前記計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース(100)、および計算された複数の軌道位置値に対応する複数の軌道トレース(102)のうちの少なくとも1つを図で表させる、コンピュータ可読記憶メディア。
【請求項9】
前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
複数の区分(118)を含むグラフィカルスケール(116)に関して前記複数の時間ベースのトレース(100)および前記複数の軌道トレース(102)を提示させて、
ユーザ選択に応じて所定のスケール区分因子に対応する前記複数の時間ベースのトレースおよび軌道のトレースを選択的に提示させる、請求項8記載の1つまたは複数のコンピュータ可読記憶メディア。
【請求項10】
前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
所定の期間について前記Y軸に沿った前記コンポーネント(12)の相対位置を含む第1の複数の時間ベースの位置値を計算させて、
所定の期間について前記X軸に沿った前記コンポーネントの相対位置を含む第2の複数の時間ベースの位置値を計算させて、
前記計算された第1の複数の時間ベースの位置値に対応する第1の時間ベースのトレース(106)、および前記計算された第2の複数の時間ベースの位置値に対応する第2の時間ベースのトレース(108)を図で表させる、請求項8記載の1つまたは複数のコンピュータ可読記憶メディア。
【請求項1】
回転装置(10)に結合されたコンポーネント(12)の相対位置を検知して、参照に対して前記コンポーネントの前記位置を示す信号を生成するように構成された少なくとも1つのセンサ(44)と、
ユーザ選択入力を示す信号を生成するように構成された入力装置(66)と、
表示装置(62)と、
前記少なくとも1つのセンサ、前記入力装置、および前記表示装置と通信するように結合されたプロセッサ(58)であって、
所定の期間について、前記コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算して、
前記コンポーネントの相対位置に関連付けられる複数の軌道位置値を計算して、
前記入力装置を介するユーザ選択入力に応じて、前記計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース(100)、および前記計算された複数の軌道位置値に対応する複数の軌道トレース(102)のうちの少なくとも1つを図で表すようにプログラムされたプロセッサとを備える、前記回転装置の動作を監視する際に使用するためのシステム(14)。
【請求項2】
前記プロセッサ(58)が、
所定の測定単位の量を含むグラフィカルスケール(116)に関して前記複数の時間ベースのトレース(100)および前記複数の軌道トレース(102)を提示して、
前記時間ベースのトレースの形および前記軌道トレースの形を選択的に調整するために、ユーザ選択に応じて前記グラフィカルスケール内の測定単位の前記量を調整する
ようにさらにプログラムされる、請求項1記載のシステム(14)。
【請求項3】
Y軸に沿った前記コンポーネント(12)の位置を検知するように構成された第1センサ(52)と、
X軸に沿った前記コンポーネントの位置を検知するように構成された第2センサ(54)とをさらに備える、請求項1記載のシステム(14)。
【請求項4】
前記プロセッサ(58)が、
所定の期間について、前記Y軸に沿った前記コンポーネント(12)の相対位置を含む第1の複数の時間ベースの位置値を計算して、
前記所定の期間について、前記X軸に沿った前記コンポーネントの相対位置を含む第2の複数の時間ベースの位置値を計算して、
前記計算された第1の複数の時間ベースの位置値に対応する第1の時間ベースのトレース(106)、および前記計算された第2の複数の時間ベースの位置値に対応する第2の時間ベースのトレース(108)を図で表すようにさらにプログラムされる、請求項3記載のシステム(14)。
【請求項5】
前記プロセッサ(58)が、
複数の所定のスケール振幅因子で、前記複数の時間ベースの位置値および前記複数の軌道位置値を計算して、
ユーザ選択に応じて所定のスケール振幅因子に対応する前記時間ベースおよび軌道のトレース(100、102)を選択的に提示するようにさらにプログラムされる、請求項1記載のシステム(14)。
【請求項6】
前記プロセッサ(58)が、
複数の所定の期間を含む前記複数の時間ベースの位置値を計算して、
ユーザ選択に応じて所定の期間で前記計算された時間ベースの位置値に対応する前記時間ベースのトレース(100)を選択的に提示するようにさらにプログラムされる、請求項5記載のシステム(14)。
【請求項7】
前記回転装置(10)の回転周波数を検知して、前記検知された回転周波数を示す信号を生成するように構成された第2センサ(56)をさらに備え、前記プロセッサ(58)が前記第2センサと通信するように結合され、前記プロセッサが、
前記受信信号に少なくとも部分的に基づいてフィルタリングされた時間ベースの位置値を計算して、
ユーザ選択に応じて前記計算されたフィルタリングされた時間ベースの位置値に対応するフィルタリングされた時間ベースのトレース(138)を提示するようにプログラムされる、請求項1記載のシステム(14)。
【請求項8】
コンピュータ実行可能命令を実装した1つまたは複数のコンピュータ可読記憶メディアであって、前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
参照に対して回転装置(10)に結合されたコンポーネント(12)の位置を示す信号を受信させて、
所定の期間について、前記コンポーネントの相対位置に関連付けられる複数の時間ベースの位置値を計算させて、
前記コンポーネントの相対位置に関連付けられる複数の軌道位置値を計算させて、
前記入力装置(66)を介するユーザ選択入力に応じて、前記計算された複数の時間ベースの位置値に対応する複数の時間ベースのトレース(100)、および計算された複数の軌道位置値に対応する複数の軌道トレース(102)のうちの少なくとも1つを図で表させる、コンピュータ可読記憶メディア。
【請求項9】
前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
複数の区分(118)を含むグラフィカルスケール(116)に関して前記複数の時間ベースのトレース(100)および前記複数の軌道トレース(102)を提示させて、
ユーザ選択に応じて所定のスケール区分因子に対応する前記複数の時間ベースのトレースおよび軌道のトレースを選択的に提示させる、請求項8記載の1つまたは複数のコンピュータ可読記憶メディア。
【請求項10】
前記コンピュータ実行可能命令が少なくとも1つのプロセッサ(58)によって実行されると、前記少なくとも1つのプロセッサに、
所定の期間について前記Y軸に沿った前記コンポーネント(12)の相対位置を含む第1の複数の時間ベースの位置値を計算させて、
所定の期間について前記X軸に沿った前記コンポーネントの相対位置を含む第2の複数の時間ベースの位置値を計算させて、
前記計算された第1の複数の時間ベースの位置値に対応する第1の時間ベースのトレース(106)、および前記計算された第2の複数の時間ベースの位置値に対応する第2の時間ベースのトレース(108)を図で表させる、請求項8記載の1つまたは複数のコンピュータ可読記憶メディア。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−3150(P2013−3150A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−137389(P2012−137389)
【出願日】平成24年6月19日(2012.6.19)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2012−137389(P2012−137389)
【出願日】平成24年6月19日(2012.6.19)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]