
回転要素の振動の測定
【解決手段】本発明は、対象物(2) の回転軸(A) に垂直な面における点に対する回転軸の距離(h) の変化を測定するためのシステムに関しており、システムは、回転軸の周りの対象物の角度位置を表す値を測定するための少なくとも2つのセンサ(31,32) を備えており、センサの内の少なくとも第1のセンサは、点に対して固定された位置に設けられており、対象物の全周に亘って変わる磁化を有する対象物によって生成される磁場の測定に適切な磁力計を有している。システムは、対象物の回転毎に、回転軸(A) に対するセンサ間の角距離(ψ)の変化に基づき距離(h) の変化を決定するための手段を更に備えている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に測定システムに関しており、更に具体的には回転要素の軸に垂直な方向への前記軸の変位の測定に関する。
【0002】
本発明は、一例として車輪の垂直方向への上昇の評価に適用される。
【背景技術】
【0003】
自動車の車輪の垂直方向への上昇の評価は、サスペンションの摩耗を評価するために使用されてもよい。別の例によれば、この評価は、サスペンションの剛性を制御するか、又は自動車の姿勢の偏りを評価するために使用される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許出願公開第0617260 号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動車のフレームに対する車輪の垂直方向への上昇を評価するための第1の公知の技術では、夫々の端部が車輪軸及びフレームに接続されているワイヤセンサが使用されている。ワイヤセンサは、ワイヤの張力を確保する中央コイルを有している。垂直方向への上昇は、この中央コイルの角度位置の測定によって評価される。このような技術の実施は、費用がかかり困難である。実際には、このような技術は、自動車の製造又は評価中の検査に用いられる。
【0006】
別の公知の技術では、エミッタがフレームによって支持され、道路に反射する光ビーム(一般的にはレーザビーム)が使用されている。光路の評価によって、フレームの高さ、ひいては車輪の垂直方向への上昇を評価することが可能になる。このような技術は依然として複雑である。更に、結果がタイヤ圧に左右される。
【0007】
別の公知の技術が、欧州特許出願公開第0617260 号明細書に述べられている。この技術では、磁石と、車輪の傾斜から垂直方向への上昇を導き出すべく車輪の傾斜を測定するためのセンサとが車輪のジョイントに一体化されている。この技術は、車輪のジョイントの著しい変更を必要とする。
【0008】
米国特許第6222290号明細書は電磁気駆動システムについて述べており、電磁気駆動システムでは、ロータの中心位置が電磁場の測定によって得られる。少なくとも2つの磁気センサが、ロータの回転位相の角度を決定してロータの位置を評価するために使用されている。
【0009】
車輪の垂直方向への上昇を評価するための簡単な構造のシステムが望まれている。特に、車輪側の変更と車輪軸側の固定とを必要としないことが望まれている。
【0010】
より一般的には、対象物の回転軸に垂直な方向へのこの対象物の変位を評価するためのシステムが望まれている。
【0011】
本発明の実施形態の目的は、回転要素の移動を評価するための公知のシステムの不利点の全て又は一部を克服することである。
【0012】
本発明の実施形態の目的は、車輪又は車輪軸への介入を必要としないシステムを提供することである。
【0013】
より一般的には、本発明の実施形態の目的は、要素の回転軸に垂直な方向への要素の変位を測定するためのシステムを提供することである。
【課題を解決するための手段】
【0014】
これら及び他の目的の全て又は一部を達成するために、本発明は、対象物の回転軸に垂直な面における点に対する前記回転軸の距離の変化を測定するためのシステムにおいて、
前記回転軸の周りの前記対象物の角度位置を表す情報の測定が可能な少なくとも2つのセンサを備えており、
該センサの内の少なくとも、前記点に対して固定された位置に設けられた第1のセンサは、対象物の全周に亘って可変な磁化を有する前記対象物によって放出される磁場の測定が可能な磁力計を有しており、
前記システムは、前記対象物の回転毎に、前記回転軸に対する前記センサ間の角距離の変化に基づき前記距離の変化を決定するための手段を更に備えており、
該手段は、前記少なくとも2つのセンサの応答間の時間的推移を使用することを特徴とするシステムを提供する。
【0015】
本発明の実施形態によれば、前記手段は、前記第1のセンサの応答信号から、前記対象物の回転毎に少なくとも1つの第1の特徴的な磁気振幅を検出する。
【0016】
本発明の実施形態によれば、前記点に対して固定された位置に設けられた少なくとも1つの第2のセンサが、第2の磁力計を有しており、前記少なくとも2つのセンサは前記点と一列に並んでいない。
【0017】
本発明の実施形態によれば、前記手段は、前記第2のセンサの応答信号から、前記第1の特徴的な磁気振幅を検出する。
【0018】
本発明の実施形態によれば、前記手段は、前記センサの夫々の応答から前記第1の特徴的な磁気振幅の発生間の時間間隔を評価し、該時間間隔から前記角距離の変化を導き出す。
【0019】
本発明の実施形態によれば、前記回転軸に対して固定された位置に設けられた第2のセンサが、前記対象物の基準角度位置を決定する。
【0020】
本発明の実施形態によれば、前記手段は、前記第1のセンサの応答における前記第1の特徴的な磁気振幅を表す位置と前記基準角度位置との角距離の変化を評価する。
【0021】
本発明の実施形態によれば、前記システムは、車輪の垂直方向への上昇の測定に適用される。
【0022】
本発明は、対象物の回転軸に垂直な面における点に対する前記回転軸の距離の変化を測定するためのシステムにおいて、
前記点に対して固定された位置に設けられ、対象物の全周に亘って可変な磁化を有する前記対象物により放出される磁場の測定が可能な磁力計を有する第1のセンサにより、前記回転軸の周りの前記対象物の角度位置を表す第1の情報を測定するステップと、
第2のセンサにより、前記回転軸の周りの前記対象物の角度位置を表す第2の情報を測定するステップと、
前記第1及び第2のセンサの応答間の時間的推移を使用して、前記対象物の回転毎に、前記回転軸に対する前記第1及び第2のセンサ間の角距離の変化を評価するステップと、
前記角距離の変化から前記距離の変化を導き出すステップと
を有することを特徴とするシステムを更に提供する。
【0023】
本発明の前述及び他の目的、特徴及び利点を、添付図面を参照して本発明を限定するものではない具体的な実施形態について以下に詳細に説明する。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係るシステムを備えた自動車を簡略化して示す図である。
【図2】自動車の車輪のレベルでのシステムを詳細に簡略化して示す図である。
【図3】角度位置に応じた自動車における車輪の磁場の形状の一例を示す図である。
【図4】測定システムを理論的に示す図である。
【図5】垂直方向への上昇を評価するためのシステムの実施形態に係る電子計算機によって実行されるステップを示すフローチャートである。
【図6】図5の実施形態の変形例の処理を示すタイミングチャートである。
【図7】垂直方向への上昇を評価するためのシステムの別の実施形態に係る電子計算機によって実行されるステップを示すフローチャートである。
【図8】図7の実施形態の処理を示すタイミングチャートである。
【図9】垂直方向への上昇を評価するためのシステムの別の実施形態に関連した車輪を簡略化して示す側面図である。
【図10】図9の垂直方向への上昇を評価するためのシステムの処理を示すタイミングチャートである。
【発明を実施するための形態】
【0025】
同一の要素は、異なる図面において同一の参照番号で示されている。
【0026】
明瞭化のために、本発明の理解に有用なステップ及び要素のみが、図面に示され説明される。特に、本発明が一例として適用される通常の鋼プライタイヤ又は鋼ベルテッドタイヤの構成の詳細が説明されておらず、本発明は、あらゆる鋼プライタイヤ及び/又は鋼ベルテッドタイヤに適合する。更に、測定がどのように利用されるかも詳述されていないが、本発明は、このような測定のあらゆる通常の利用に適合する。特に指定されていない限り、方向(垂直、水平等)及び相対的位置(下、上等)を示す用語は、図面の向きで任意に表現される。
【0027】
説明される本発明の実施形態は、強磁性材料、ほとんどの場合鋼から形成された金属ベルトが自動車のタイヤに設けられていることを利用しており、従って、鋼が受けた磁場による残留磁気が存在する。この金属ベルトは、タイヤのトレッドのレベルでタイヤのゴムと一体化されている。
【0028】
より一般的には、これらの実施形態は、回転要素の周上で不均一な磁化を有することが可能な回転要素に適用されており、そのため、磁化の測定によって角度位置が決定され得る。
【0029】
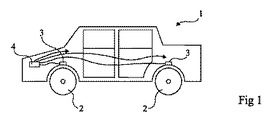
図1は、自動車1 の車輪2 の垂直方向への上昇を評価するためのシステムを備えた自動車1 を非常に簡略化して示す側面図である。自動車1 の車輪2 は夫々、垂直方向への上昇を測定するための測定装置3 を備えていると仮定されており、様々な測定結果が、集中管理装置4 、例えば自動車に搭載されたコンピュータによって集められると仮定されている。図1の図示は簡略化されており、2つの測定装置3 のみが示されている。
【0030】
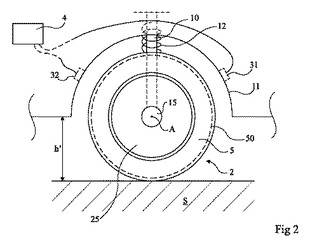
図2は、図1に示された自動車1 の車輪2 のレベルを拡大して示している。一般に、車輪2 のリム25がハブ15に組み立てられており、ハブ15は、ダンパ及び(ばね12によって表された)ばねシステムによって自動車1 のフレーム11に接続されたアーム10に支持されている。自動車が走行しているとき、地面S に対するフレーム11の高さh’が、サスペンションの圧縮とタイヤの圧縮とによって変わる。アイドル位置の前後の変化が、走行中の車輪の垂直方向への上昇を表わす。(場合によっては制御される)多くの減衰機構が知られており、説明される実施形態は、垂直方向へ上昇するあらゆる車輪に適用される。
【0031】
図2に示された例では、リム25は、金属ベルト50を有するタイヤ5 を支持している。金属ベルト50の磁化は、タイヤ5 の履歴と、金属ベルト50が特には製造中に受けた磁場とに左右される。更に本発明者は、この磁化がタイヤの全周に亘って可変であることを確認した。
【0032】
図2に示された測定装置3 は2つの磁力計31,32 を有しており、磁力計31,32 は、自動車のフレームに固定された要素、例えば実際のフレーム又は本体要素(ホイールハウスのレベルにおけるフェンダーの内側)に支持されている。タイヤの磁化が不均一であるので、車輪が回転するとともに、各磁力計により測定される磁場の値が変わる。車輪の角度位置の関数であるこのような変化は、1回転を繰り返すタイヤの周期的な磁気特性を定める。
【0033】
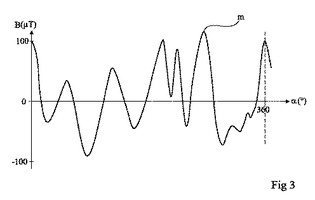
図3は、角度位置α(単位:度、°)に応じた、車輪軸からの固定距離で測定された磁場(単位:マイクロテスラ、μT )の強度の変化の一例を示している。図3の図示では、磁場振幅の大きさの程度に加えて、0乃至360 度の角度位置が任意に特定されている。この振幅は、言うまでもなくタイヤの表面からの磁力計の距離により決まる。同様に、0マイクロテスラの基準レベルは任意であり、磁力計のサンプリングにより決まる。
【0034】
各磁力計によって測定される磁場は、車輪の全ての金属要素(特には、リムが鋼から形成されている場合のリム)に影響を受ける。しかしながら、リムの残留磁気でさえ可変であり、従って、車輪の周上で測定可能な磁場の変化に関係する。自動車への適用では、実際には、磁力計が、車輪の半径の2倍未満を示す回転軸A からの距離に車輪の半径方向に配置されている場合、磁力計は、車輪の角度位置に応じた磁場変化の検出を可能にするとみなされ得る。より一般的には、位置決めのための規定は、回転要素が、磁力計から見て、回転要素の回転軸の周りでの角度位置に応じて可変である磁化を有するとみなされ得ることである。この回転軸A からの距離は、言うまでもなく磁力計の感度により決まる。
【0035】
従って、車輪が回転するとき、各磁力計は車輪の特性を測定するが、測定は時間的推移で行われる。
【0036】
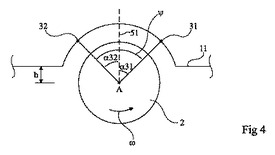
図4は、図2に示された測定システムの処理を簡略化して示す図である。2つの磁力計は、参照番号31,32 によって特定される位置に表されている。車輪2 が反時計回りに回転すると仮定すると、磁気特性の特性点が磁力計31によって検出され、その後、磁力計32によって遅延τの後に検出される。「特性点」は、車輪の回転毎に磁力計の応答で検出され得る特性の点を表す。この点は、振幅の最大値(m 、図3)又は最小値であることが好ましい。磁力計31における最大値m の発生に対する磁力計32における最大値m の発生の遅延τは、車輪の回転速度ωと、車輪の中心としての回転軸A を磁力計31,32 の位置に夫々接続するベクトル間の角度ψとにより決まる。角度ψは、回転軸A とフレーム11との間の高さh により決まるか、(又は、回転軸A と磁力計31,32 に関する任意の固定点との間の高さにより決まる)。回転軸A が磁力計31,32 の位置を接続する直線より下にあると仮定されている図4の例では、高さh がより低く、角度ψがより広く、遅延τがより大きい。回転軸A が磁力計31,32 の位置を接続する直線より上にある場合、回転軸A と、回転軸A に対する垂直方向51とこの直線との交点との間隔の振幅が、角度ψが小さくなるに伴い増加し、従って、遅延が減少する。遅延の評価に必要な時刻基準、従って角度変化が、様々な方法(車輪の回転速度の測定、時刻の関数としての角度位置の直接取得等)で得られてもよい。様々な方法の例を以下に述べる。
【0037】
簡略化のために、センサ31,32が回転軸A に垂直な平面にあると仮定されている。しかしながら、センサが回転軸に垂直な平面でずれている場合に置き換えて述べる。そのため、振幅の補正が、異なる信号を比較するために必要である。
【0038】
磁力計31,32 の位置、より具体的には回転軸A に関する垂直方向51からの磁力計31,32 の距離が、測定の精度を左右する。センサが互いに離れている程、与えられる分解能がより明確になる。2つの磁力計は、車輪の回転軸A に関する垂直方向51に対して対称的な位置に配置されていることが好ましい。理想的には、磁力計31,32 は、(上昇していない)アイドル位置が180 °の角度に相当する(磁力計が回転軸A と水平に一列に並んでいる)ように配置されている。説明を簡略化するために、磁力計31,32 が夫々配置されているラジアル方向と上昇が測定される方向(本例では、垂直方向)との角度α1 及び角度α2 が等しいと仮定されている。実際には、測定された角度変化の基準を調整し、従って角度差を補うためにセンサによって与えられる電気信号に対して行われる処理を適合させるという条件では、これらの角度は異なってもよい。しかしながら、2つのセンサ31,32 が応答する際に磁気特性が同一の点で発生し遅延が生じないので、センサ31,32 は測定されるべき上昇の方向に一列に並べられていないことを確認する。
【0039】
磁力計31,32 は、タイヤの外周から等距離に配置されていることが好ましい。そうでなければ、センサによって与えられる電気信号に対して行われる処理は、測定された磁場の振幅を同一の基準に調整し、従って距離差を補うために適合される。
【0040】
実際には、自動車のフレーム上におけるセンサの位置の選択は、自動車のタイプ及び利用可能な位置に左右される。
【0041】
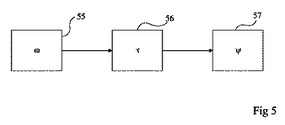
図5は、図2及び4に示されたシステムで垂直方向への上昇を測定するための方法の実施形態をブロック形式で示している。
【0042】
本例では、磁気特性の特性点(例えば、最大値又は最小値)の発生間の遅延の評価を可能にする時刻基準は、車輪の回転速度である。回転速度ωは、様々な方法で得られる(ステップ55)。例えば、この回転速度は、搭載されたコンピュータによって自動車の速度から導き出される。別の例によれば、回転速度は、車輪に一体化された速度センサによって与えられ、搭載されたコンピュータによって(一般的には、現在多くの自動車が備えているESP 、すなわち「横滑り防止機構」のために)利用される。
【0043】
2つのセンサ31,32 によって測定された特性の同一点(本例では、最大値)の発生間の遅延τが、センサ31,32 の夫々の応答中の最大値の検出によって決定される(ステップ56)。
【0044】
最後に、角度ψが、回転速度ωに対する遅延τの比率を計算することにより導き出される(ステップ57)。角度を得るユニットは角速度ユニットに基づいている。
【0045】
図6A及び6Bは、システムを他のセンサから独立させている間の車輪のレベルでの局所的な時刻基準を提供する、図5に示された実施形態の変形例を示す磁力計31,32 の電気的な応答B31,B32の例を示すタイミングチャートである。磁気特性の期間T (図6A)が、特性点の2つの連続的な発生間の時間間隔を決定することにより、磁力計の内の一方の応答(例えば、B31 )から抽出される。この時間間隔は、受信信号に基づく計算によって決定される。その後、計算機は角速度(ω=360/T、又は2π/T)を決定する。ステップ56,57 は変更されない。
【0046】
測定の信頼性は、最大点又は最小点の発生をマスクし得る磁気擾乱によって引き起こされる誤差を回避するために、複数の特性点を考慮することにより更に高くなり得る。
【0047】
図6A及び6Bに示された例では、遅延τ0 が、応答B31,B32 の最初の期間によって図示された(上昇していない)アイドル位置に相当すると仮定されている。車輪は、一定の速度で回転し、2回目の回転で上方に移動すると仮定されている。従って、最大値m が、まずセンサ31によって検出され、その後、センサ32によって前回の期間に関して検出される。そのため、2つの応答での最大値の発生間の遅延τ1 は、遅延τ0 より大きい。
【0048】
単純化のために、上記の例はアナログ技術により対応する技術に関連して述べられているが、実際には、様々なステップが、デジタル技術での信号のサンプリング後に優先的に行われる。
【0049】
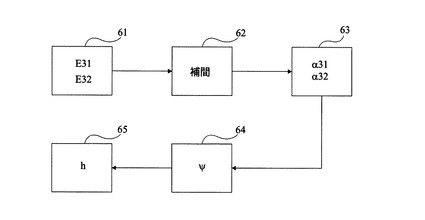
図7は、垂直方向への上昇を評価するためのシステムの別の実施形態の電子計算機によって実行されるステップを示すフローチャートである。
【0050】
図8A,8B,8C,8D,8E,8F は、図7に示された実施形態の処理を示すタイミングチャートである。図6A及び6Bに示された電気的な応答と同一の電気的な応答B31,B32 が仮定されている。
【0051】
センサの応答B31,B32がサンプリングされて、同一の特性点(例えば、最大値m )の連続的な発生時刻が、経過E31 (図8A)及び経過E32 (図8B)によって示されているように、2つのセンサのサンプリングされた応答により検出される(ステップ61、図7)。
【0052】
その後、直線補間が行われて(ステップ62、補間)、時刻の関数として角度位置α31(図8C)及び角度位置α32(図8D)がセンサ毎に得られる(ステップ63)。原点(角度0)が、最大点の発生時刻に任意に設定される。図8C,8D は、中間の角度180 °を示している。
【0053】
その後、角度位置α31と角度位置α32との差が算出されて(ステップ64)、角度ψ(図8E)が得られる。本例では、システムは、車輪の回転周期毎に角度を2回(センサ32の角度位置0°及び角度位置180 °で)決定すると仮定されている。角度は、例えば連続的に45,45,45,90,135,135 度等の値を有する。
【0054】
最後に、垂直方向への上昇h (図8F)が角度ψから導き出される(ステップ65、図7)。図8A乃至8Fの例が図6A,6B の経過を使用するので、上昇h は、最初の3つの利用されたサンプルでは0であり、その後、第1の値−d1 を有し(車輪が基準位置に対して上方に移動する場合、負の値が任意に考慮される)、その後、値−d2 を有する。
【0055】
図5に関連して述べられた例と比較すると、図8A乃至8Dは、システムの分解能が、考慮した測定サンプルの数により決まることを示している(車輪が上方に移動したときの中間の上昇−d1 が180 °の中間位置によって検出される)。
【0056】
センサの応答B31,B32のサンプリング周波数は、予期される車輪の回転速度の最大値に応じて選択され、そのため、十分な数のサンプルが、1回転毎に少なくとも1つの特性点を分離することを可能にし、車輪の1回転毎に上昇の少なくとも1つの評価が得られる。
【0057】
自動車への適用のためには、サスペンションの共振周波数は1Hz程度である。1回転毎に1つの評価を考慮することにより、自動車が約15km/hを越えて走行するとすぐに、良好な結果が得られる。実際には、特性点の検出の信頼性を更に高くするために、毎秒少なくとも100 のサンプルを取得することが好ましい。
【0058】
車輪の一定の回転速度が上記のタイミングチャートで考慮されているが、上述された技術では、回転速度が何であれ上昇が評価されており、上昇の測定がこの回転速度を考慮して行われる。
【0059】
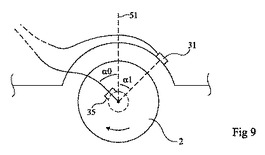
図9は、垂直方向への上昇を評価するためのシステムの別の実施形態に関連した車輪を簡略化して示す側面図である。
【0060】
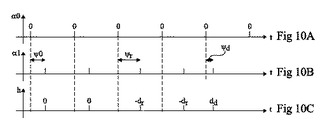
図10A,10B,10Cは、図9に示されたシステムの処理を示すタイミングチャートである。
【0061】
本例では、単一の磁力計31が磁気特性を測定するために使用されている。基準角度位置が、車輪に支持され、時刻の関数として垂直方向に対する基準角度α0 を与えることが可能な非磁性センサ35によって与えられる。図10A に示されているように、(任意に0°と示された)基準の発生周期は、車輪の垂直方向への上昇とは無関係である。言うまでもなく、基準の発生周期は、単純化のために安定しているとみなされている車輪の回転速度により決まる。磁力計31は、特性の特性点の発生を表す角度α1 (図10B )の応答を与える。上昇h (図10C )は、角度ψの変化(α0 +α1 )から導き出され得る。前の実施形態と比較すると、上昇の評価を考慮するための角度ψは、車輪軸に関する垂直方向51の一側でのみ広がり狭くなる。
【0062】
図10B,10C では、車輪は、第1回目及び第2回目の回転でのアイドル位置(角度ψ0 、距離0)に対して、第3回目及び第4回目の回転(角度ψr 、距離−dr )で上方に移動し、第5回目の回転(角度ψd 、距離+dd )で下方に移動すると仮定されている。
【0063】
2つの磁気センサが設けられている実施形態でのように、2つの磁気センサの応答間の時間的推移が利用され、非磁性センサ35の応答はここでは基準を与えている。
【0064】
いずれの実施形態でも、角度ψ又は角度α1 の変化からの上昇h の取得は、(例えば、訓練法(training procedure)による)サンプリングを必要とするか、又はセンサの位置とアイドル状態での(車輪の)回転軸の角度位置とを考慮した幾何学的な計算を必要とする。
【0065】
しかしながら、測定を可能にするためには車輪は回転する必要がある。
【0066】
特性で使用される特性点がセンサ31とセンサ32とで異なる(例えば、センサ31では最小値であり、センサ32では最大値である)場合であっても、特性でのこれらの特性点間の距離の決定は、計算を可能にするには十分である。
【0067】
別の代替的な実施形態によれば、第3のセンサ(磁力計)が別の角度位置を測定するために使用される。従って、測定で得られた更なる結果により正確さが実現される。
【0068】
述べられた実施形態の利点は、既存のタイヤを修正する必要がないことである。更に、述べられた実施形態は、非磁性センサが設けられている実施形態では車輪に既に設けられている角度センサを使用するという条件では、既存のリム及びハブを修正する必要がない。
【0069】
更に、評価がフレームに対する回転軸の位置に関して行なわれるので、測定はタイヤ圧とは無関係である。タイヤの空気が抜かれる場合、タイヤとセンサとの距離が増大するので、測定された信号の振幅は減少するが、磁気特性は最大値及び最小値を維持する。
【0070】
タイヤ(より一般的には車輪)の金属ベルトの残留磁気は、タイヤの寿命中に変化する危険性がある。これは、車輪の外周で測定可能な磁場が常に特性点(最大値及び最小値)を有するので、本発明の処理では影響を及ぼさない。更に、少なくとも2つの磁力計が設けられている実施形態では、システムの適応が自動的である。単一の磁気センサが設けられている実施形態では、システムの周期的なサンプリングを調整する必要があり、必要ならば、基準位置と特性点との距離を調整する必要がある。
【0071】
変形例として、タイヤは、製造中にタイヤに不均一な磁化を与える制御された磁場を受ける。このため、磁化を増大させることが可能になり、従って、磁力計によって検出される信号の強度を増大させることが可能になる。更に、必要に応じて、磁化がシヌソイド形状の特性を発生させてもよい。このため、検出された信号間の位相シフトの測定から上昇を測定することがより簡単になる。
【0072】
尚、磁力計は地磁界を検出する。これは、車輪の回転毎の信号を中心に集中させることにより特性の直流成分を抑えることが可能であるので、評価に影響を及ぼさない。
【0073】
本発明は、車輪への適用に関連してより具体的に述べられているが、回転要素が、上昇の測定が望まれている軸に垂直な面で固定された磁力計によって検出されるべき十分な振幅を有し、回転要素の角度位置に応じて変わる磁気特性を有する場合、本発明はより一般的に適用される。特に、この上昇は、所与の方向であるという条件では、必ずしも垂直方向である必要はない。更に、磁化の可変特性は、中実状の円柱での磁化の不均一性に起因する場合がある。このような不均一性は、円柱の内部、又は円柱の表面の凹凸から生じる場合がある。
【0074】
例えば、このような決定は、中実状の金属ローラの磁気特性がその全周に亘って変わるという条件では金属ローラに対して行われてもよい。従って、本発明は、産業設備の機械のローラの回転軸へのこの回転軸に垂直な平面での距離の変化を測定するために使用されてもよい。
【0075】
様々な変形例を備えた様々な実施形態が上述されている。尚、当業者は、いかなる進歩性を有するステップも示さずに、これらの様々な実施形態及び変形例の様々な要素を組み合わせてもよい。更に、本発明の実際的な実施と、センサの制御、及び適した手段による測定結果の格納及び処理を組織化すべく適切にプログラムされたか又は構成されたコンピュータ手段又は電子計算機によって行なわれるべき計算とは、上記に与えられた機能表示に基づく当業者の技能の範囲内である。
【技術分野】
【0001】
本発明は、一般的に測定システムに関しており、更に具体的には回転要素の軸に垂直な方向への前記軸の変位の測定に関する。
【0002】
本発明は、一例として車輪の垂直方向への上昇の評価に適用される。
【背景技術】
【0003】
自動車の車輪の垂直方向への上昇の評価は、サスペンションの摩耗を評価するために使用されてもよい。別の例によれば、この評価は、サスペンションの剛性を制御するか、又は自動車の姿勢の偏りを評価するために使用される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許出願公開第0617260 号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動車のフレームに対する車輪の垂直方向への上昇を評価するための第1の公知の技術では、夫々の端部が車輪軸及びフレームに接続されているワイヤセンサが使用されている。ワイヤセンサは、ワイヤの張力を確保する中央コイルを有している。垂直方向への上昇は、この中央コイルの角度位置の測定によって評価される。このような技術の実施は、費用がかかり困難である。実際には、このような技術は、自動車の製造又は評価中の検査に用いられる。
【0006】
別の公知の技術では、エミッタがフレームによって支持され、道路に反射する光ビーム(一般的にはレーザビーム)が使用されている。光路の評価によって、フレームの高さ、ひいては車輪の垂直方向への上昇を評価することが可能になる。このような技術は依然として複雑である。更に、結果がタイヤ圧に左右される。
【0007】
別の公知の技術が、欧州特許出願公開第0617260 号明細書に述べられている。この技術では、磁石と、車輪の傾斜から垂直方向への上昇を導き出すべく車輪の傾斜を測定するためのセンサとが車輪のジョイントに一体化されている。この技術は、車輪のジョイントの著しい変更を必要とする。
【0008】
米国特許第6222290号明細書は電磁気駆動システムについて述べており、電磁気駆動システムでは、ロータの中心位置が電磁場の測定によって得られる。少なくとも2つの磁気センサが、ロータの回転位相の角度を決定してロータの位置を評価するために使用されている。
【0009】
車輪の垂直方向への上昇を評価するための簡単な構造のシステムが望まれている。特に、車輪側の変更と車輪軸側の固定とを必要としないことが望まれている。
【0010】
より一般的には、対象物の回転軸に垂直な方向へのこの対象物の変位を評価するためのシステムが望まれている。
【0011】
本発明の実施形態の目的は、回転要素の移動を評価するための公知のシステムの不利点の全て又は一部を克服することである。
【0012】
本発明の実施形態の目的は、車輪又は車輪軸への介入を必要としないシステムを提供することである。
【0013】
より一般的には、本発明の実施形態の目的は、要素の回転軸に垂直な方向への要素の変位を測定するためのシステムを提供することである。
【課題を解決するための手段】
【0014】
これら及び他の目的の全て又は一部を達成するために、本発明は、対象物の回転軸に垂直な面における点に対する前記回転軸の距離の変化を測定するためのシステムにおいて、
前記回転軸の周りの前記対象物の角度位置を表す情報の測定が可能な少なくとも2つのセンサを備えており、
該センサの内の少なくとも、前記点に対して固定された位置に設けられた第1のセンサは、対象物の全周に亘って可変な磁化を有する前記対象物によって放出される磁場の測定が可能な磁力計を有しており、
前記システムは、前記対象物の回転毎に、前記回転軸に対する前記センサ間の角距離の変化に基づき前記距離の変化を決定するための手段を更に備えており、
該手段は、前記少なくとも2つのセンサの応答間の時間的推移を使用することを特徴とするシステムを提供する。
【0015】
本発明の実施形態によれば、前記手段は、前記第1のセンサの応答信号から、前記対象物の回転毎に少なくとも1つの第1の特徴的な磁気振幅を検出する。
【0016】
本発明の実施形態によれば、前記点に対して固定された位置に設けられた少なくとも1つの第2のセンサが、第2の磁力計を有しており、前記少なくとも2つのセンサは前記点と一列に並んでいない。
【0017】
本発明の実施形態によれば、前記手段は、前記第2のセンサの応答信号から、前記第1の特徴的な磁気振幅を検出する。
【0018】
本発明の実施形態によれば、前記手段は、前記センサの夫々の応答から前記第1の特徴的な磁気振幅の発生間の時間間隔を評価し、該時間間隔から前記角距離の変化を導き出す。
【0019】
本発明の実施形態によれば、前記回転軸に対して固定された位置に設けられた第2のセンサが、前記対象物の基準角度位置を決定する。
【0020】
本発明の実施形態によれば、前記手段は、前記第1のセンサの応答における前記第1の特徴的な磁気振幅を表す位置と前記基準角度位置との角距離の変化を評価する。
【0021】
本発明の実施形態によれば、前記システムは、車輪の垂直方向への上昇の測定に適用される。
【0022】
本発明は、対象物の回転軸に垂直な面における点に対する前記回転軸の距離の変化を測定するためのシステムにおいて、
前記点に対して固定された位置に設けられ、対象物の全周に亘って可変な磁化を有する前記対象物により放出される磁場の測定が可能な磁力計を有する第1のセンサにより、前記回転軸の周りの前記対象物の角度位置を表す第1の情報を測定するステップと、
第2のセンサにより、前記回転軸の周りの前記対象物の角度位置を表す第2の情報を測定するステップと、
前記第1及び第2のセンサの応答間の時間的推移を使用して、前記対象物の回転毎に、前記回転軸に対する前記第1及び第2のセンサ間の角距離の変化を評価するステップと、
前記角距離の変化から前記距離の変化を導き出すステップと
を有することを特徴とするシステムを更に提供する。
【0023】
本発明の前述及び他の目的、特徴及び利点を、添付図面を参照して本発明を限定するものではない具体的な実施形態について以下に詳細に説明する。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係るシステムを備えた自動車を簡略化して示す図である。
【図2】自動車の車輪のレベルでのシステムを詳細に簡略化して示す図である。
【図3】角度位置に応じた自動車における車輪の磁場の形状の一例を示す図である。
【図4】測定システムを理論的に示す図である。
【図5】垂直方向への上昇を評価するためのシステムの実施形態に係る電子計算機によって実行されるステップを示すフローチャートである。
【図6】図5の実施形態の変形例の処理を示すタイミングチャートである。
【図7】垂直方向への上昇を評価するためのシステムの別の実施形態に係る電子計算機によって実行されるステップを示すフローチャートである。
【図8】図7の実施形態の処理を示すタイミングチャートである。
【図9】垂直方向への上昇を評価するためのシステムの別の実施形態に関連した車輪を簡略化して示す側面図である。
【図10】図9の垂直方向への上昇を評価するためのシステムの処理を示すタイミングチャートである。
【発明を実施するための形態】
【0025】
同一の要素は、異なる図面において同一の参照番号で示されている。
【0026】
明瞭化のために、本発明の理解に有用なステップ及び要素のみが、図面に示され説明される。特に、本発明が一例として適用される通常の鋼プライタイヤ又は鋼ベルテッドタイヤの構成の詳細が説明されておらず、本発明は、あらゆる鋼プライタイヤ及び/又は鋼ベルテッドタイヤに適合する。更に、測定がどのように利用されるかも詳述されていないが、本発明は、このような測定のあらゆる通常の利用に適合する。特に指定されていない限り、方向(垂直、水平等)及び相対的位置(下、上等)を示す用語は、図面の向きで任意に表現される。
【0027】
説明される本発明の実施形態は、強磁性材料、ほとんどの場合鋼から形成された金属ベルトが自動車のタイヤに設けられていることを利用しており、従って、鋼が受けた磁場による残留磁気が存在する。この金属ベルトは、タイヤのトレッドのレベルでタイヤのゴムと一体化されている。
【0028】
より一般的には、これらの実施形態は、回転要素の周上で不均一な磁化を有することが可能な回転要素に適用されており、そのため、磁化の測定によって角度位置が決定され得る。
【0029】
図1は、自動車1 の車輪2 の垂直方向への上昇を評価するためのシステムを備えた自動車1 を非常に簡略化して示す側面図である。自動車1 の車輪2 は夫々、垂直方向への上昇を測定するための測定装置3 を備えていると仮定されており、様々な測定結果が、集中管理装置4 、例えば自動車に搭載されたコンピュータによって集められると仮定されている。図1の図示は簡略化されており、2つの測定装置3 のみが示されている。
【0030】
図2は、図1に示された自動車1 の車輪2 のレベルを拡大して示している。一般に、車輪2 のリム25がハブ15に組み立てられており、ハブ15は、ダンパ及び(ばね12によって表された)ばねシステムによって自動車1 のフレーム11に接続されたアーム10に支持されている。自動車が走行しているとき、地面S に対するフレーム11の高さh’が、サスペンションの圧縮とタイヤの圧縮とによって変わる。アイドル位置の前後の変化が、走行中の車輪の垂直方向への上昇を表わす。(場合によっては制御される)多くの減衰機構が知られており、説明される実施形態は、垂直方向へ上昇するあらゆる車輪に適用される。
【0031】
図2に示された例では、リム25は、金属ベルト50を有するタイヤ5 を支持している。金属ベルト50の磁化は、タイヤ5 の履歴と、金属ベルト50が特には製造中に受けた磁場とに左右される。更に本発明者は、この磁化がタイヤの全周に亘って可変であることを確認した。
【0032】
図2に示された測定装置3 は2つの磁力計31,32 を有しており、磁力計31,32 は、自動車のフレームに固定された要素、例えば実際のフレーム又は本体要素(ホイールハウスのレベルにおけるフェンダーの内側)に支持されている。タイヤの磁化が不均一であるので、車輪が回転するとともに、各磁力計により測定される磁場の値が変わる。車輪の角度位置の関数であるこのような変化は、1回転を繰り返すタイヤの周期的な磁気特性を定める。
【0033】
図3は、角度位置α(単位:度、°)に応じた、車輪軸からの固定距離で測定された磁場(単位:マイクロテスラ、μT )の強度の変化の一例を示している。図3の図示では、磁場振幅の大きさの程度に加えて、0乃至360 度の角度位置が任意に特定されている。この振幅は、言うまでもなくタイヤの表面からの磁力計の距離により決まる。同様に、0マイクロテスラの基準レベルは任意であり、磁力計のサンプリングにより決まる。
【0034】
各磁力計によって測定される磁場は、車輪の全ての金属要素(特には、リムが鋼から形成されている場合のリム)に影響を受ける。しかしながら、リムの残留磁気でさえ可変であり、従って、車輪の周上で測定可能な磁場の変化に関係する。自動車への適用では、実際には、磁力計が、車輪の半径の2倍未満を示す回転軸A からの距離に車輪の半径方向に配置されている場合、磁力計は、車輪の角度位置に応じた磁場変化の検出を可能にするとみなされ得る。より一般的には、位置決めのための規定は、回転要素が、磁力計から見て、回転要素の回転軸の周りでの角度位置に応じて可変である磁化を有するとみなされ得ることである。この回転軸A からの距離は、言うまでもなく磁力計の感度により決まる。
【0035】
従って、車輪が回転するとき、各磁力計は車輪の特性を測定するが、測定は時間的推移で行われる。
【0036】
図4は、図2に示された測定システムの処理を簡略化して示す図である。2つの磁力計は、参照番号31,32 によって特定される位置に表されている。車輪2 が反時計回りに回転すると仮定すると、磁気特性の特性点が磁力計31によって検出され、その後、磁力計32によって遅延τの後に検出される。「特性点」は、車輪の回転毎に磁力計の応答で検出され得る特性の点を表す。この点は、振幅の最大値(m 、図3)又は最小値であることが好ましい。磁力計31における最大値m の発生に対する磁力計32における最大値m の発生の遅延τは、車輪の回転速度ωと、車輪の中心としての回転軸A を磁力計31,32 の位置に夫々接続するベクトル間の角度ψとにより決まる。角度ψは、回転軸A とフレーム11との間の高さh により決まるか、(又は、回転軸A と磁力計31,32 に関する任意の固定点との間の高さにより決まる)。回転軸A が磁力計31,32 の位置を接続する直線より下にあると仮定されている図4の例では、高さh がより低く、角度ψがより広く、遅延τがより大きい。回転軸A が磁力計31,32 の位置を接続する直線より上にある場合、回転軸A と、回転軸A に対する垂直方向51とこの直線との交点との間隔の振幅が、角度ψが小さくなるに伴い増加し、従って、遅延が減少する。遅延の評価に必要な時刻基準、従って角度変化が、様々な方法(車輪の回転速度の測定、時刻の関数としての角度位置の直接取得等)で得られてもよい。様々な方法の例を以下に述べる。
【0037】
簡略化のために、センサ31,32が回転軸A に垂直な平面にあると仮定されている。しかしながら、センサが回転軸に垂直な平面でずれている場合に置き換えて述べる。そのため、振幅の補正が、異なる信号を比較するために必要である。
【0038】
磁力計31,32 の位置、より具体的には回転軸A に関する垂直方向51からの磁力計31,32 の距離が、測定の精度を左右する。センサが互いに離れている程、与えられる分解能がより明確になる。2つの磁力計は、車輪の回転軸A に関する垂直方向51に対して対称的な位置に配置されていることが好ましい。理想的には、磁力計31,32 は、(上昇していない)アイドル位置が180 °の角度に相当する(磁力計が回転軸A と水平に一列に並んでいる)ように配置されている。説明を簡略化するために、磁力計31,32 が夫々配置されているラジアル方向と上昇が測定される方向(本例では、垂直方向)との角度α1 及び角度α2 が等しいと仮定されている。実際には、測定された角度変化の基準を調整し、従って角度差を補うためにセンサによって与えられる電気信号に対して行われる処理を適合させるという条件では、これらの角度は異なってもよい。しかしながら、2つのセンサ31,32 が応答する際に磁気特性が同一の点で発生し遅延が生じないので、センサ31,32 は測定されるべき上昇の方向に一列に並べられていないことを確認する。
【0039】
磁力計31,32 は、タイヤの外周から等距離に配置されていることが好ましい。そうでなければ、センサによって与えられる電気信号に対して行われる処理は、測定された磁場の振幅を同一の基準に調整し、従って距離差を補うために適合される。
【0040】
実際には、自動車のフレーム上におけるセンサの位置の選択は、自動車のタイプ及び利用可能な位置に左右される。
【0041】
図5は、図2及び4に示されたシステムで垂直方向への上昇を測定するための方法の実施形態をブロック形式で示している。
【0042】
本例では、磁気特性の特性点(例えば、最大値又は最小値)の発生間の遅延の評価を可能にする時刻基準は、車輪の回転速度である。回転速度ωは、様々な方法で得られる(ステップ55)。例えば、この回転速度は、搭載されたコンピュータによって自動車の速度から導き出される。別の例によれば、回転速度は、車輪に一体化された速度センサによって与えられ、搭載されたコンピュータによって(一般的には、現在多くの自動車が備えているESP 、すなわち「横滑り防止機構」のために)利用される。
【0043】
2つのセンサ31,32 によって測定された特性の同一点(本例では、最大値)の発生間の遅延τが、センサ31,32 の夫々の応答中の最大値の検出によって決定される(ステップ56)。
【0044】
最後に、角度ψが、回転速度ωに対する遅延τの比率を計算することにより導き出される(ステップ57)。角度を得るユニットは角速度ユニットに基づいている。
【0045】
図6A及び6Bは、システムを他のセンサから独立させている間の車輪のレベルでの局所的な時刻基準を提供する、図5に示された実施形態の変形例を示す磁力計31,32 の電気的な応答B31,B32の例を示すタイミングチャートである。磁気特性の期間T (図6A)が、特性点の2つの連続的な発生間の時間間隔を決定することにより、磁力計の内の一方の応答(例えば、B31 )から抽出される。この時間間隔は、受信信号に基づく計算によって決定される。その後、計算機は角速度(ω=360/T、又は2π/T)を決定する。ステップ56,57 は変更されない。
【0046】
測定の信頼性は、最大点又は最小点の発生をマスクし得る磁気擾乱によって引き起こされる誤差を回避するために、複数の特性点を考慮することにより更に高くなり得る。
【0047】
図6A及び6Bに示された例では、遅延τ0 が、応答B31,B32 の最初の期間によって図示された(上昇していない)アイドル位置に相当すると仮定されている。車輪は、一定の速度で回転し、2回目の回転で上方に移動すると仮定されている。従って、最大値m が、まずセンサ31によって検出され、その後、センサ32によって前回の期間に関して検出される。そのため、2つの応答での最大値の発生間の遅延τ1 は、遅延τ0 より大きい。
【0048】
単純化のために、上記の例はアナログ技術により対応する技術に関連して述べられているが、実際には、様々なステップが、デジタル技術での信号のサンプリング後に優先的に行われる。
【0049】
図7は、垂直方向への上昇を評価するためのシステムの別の実施形態の電子計算機によって実行されるステップを示すフローチャートである。
【0050】
図8A,8B,8C,8D,8E,8F は、図7に示された実施形態の処理を示すタイミングチャートである。図6A及び6Bに示された電気的な応答と同一の電気的な応答B31,B32 が仮定されている。
【0051】
センサの応答B31,B32がサンプリングされて、同一の特性点(例えば、最大値m )の連続的な発生時刻が、経過E31 (図8A)及び経過E32 (図8B)によって示されているように、2つのセンサのサンプリングされた応答により検出される(ステップ61、図7)。
【0052】
その後、直線補間が行われて(ステップ62、補間)、時刻の関数として角度位置α31(図8C)及び角度位置α32(図8D)がセンサ毎に得られる(ステップ63)。原点(角度0)が、最大点の発生時刻に任意に設定される。図8C,8D は、中間の角度180 °を示している。
【0053】
その後、角度位置α31と角度位置α32との差が算出されて(ステップ64)、角度ψ(図8E)が得られる。本例では、システムは、車輪の回転周期毎に角度を2回(センサ32の角度位置0°及び角度位置180 °で)決定すると仮定されている。角度は、例えば連続的に45,45,45,90,135,135 度等の値を有する。
【0054】
最後に、垂直方向への上昇h (図8F)が角度ψから導き出される(ステップ65、図7)。図8A乃至8Fの例が図6A,6B の経過を使用するので、上昇h は、最初の3つの利用されたサンプルでは0であり、その後、第1の値−d1 を有し(車輪が基準位置に対して上方に移動する場合、負の値が任意に考慮される)、その後、値−d2 を有する。
【0055】
図5に関連して述べられた例と比較すると、図8A乃至8Dは、システムの分解能が、考慮した測定サンプルの数により決まることを示している(車輪が上方に移動したときの中間の上昇−d1 が180 °の中間位置によって検出される)。
【0056】
センサの応答B31,B32のサンプリング周波数は、予期される車輪の回転速度の最大値に応じて選択され、そのため、十分な数のサンプルが、1回転毎に少なくとも1つの特性点を分離することを可能にし、車輪の1回転毎に上昇の少なくとも1つの評価が得られる。
【0057】
自動車への適用のためには、サスペンションの共振周波数は1Hz程度である。1回転毎に1つの評価を考慮することにより、自動車が約15km/hを越えて走行するとすぐに、良好な結果が得られる。実際には、特性点の検出の信頼性を更に高くするために、毎秒少なくとも100 のサンプルを取得することが好ましい。
【0058】
車輪の一定の回転速度が上記のタイミングチャートで考慮されているが、上述された技術では、回転速度が何であれ上昇が評価されており、上昇の測定がこの回転速度を考慮して行われる。
【0059】
図9は、垂直方向への上昇を評価するためのシステムの別の実施形態に関連した車輪を簡略化して示す側面図である。
【0060】
図10A,10B,10Cは、図9に示されたシステムの処理を示すタイミングチャートである。
【0061】
本例では、単一の磁力計31が磁気特性を測定するために使用されている。基準角度位置が、車輪に支持され、時刻の関数として垂直方向に対する基準角度α0 を与えることが可能な非磁性センサ35によって与えられる。図10A に示されているように、(任意に0°と示された)基準の発生周期は、車輪の垂直方向への上昇とは無関係である。言うまでもなく、基準の発生周期は、単純化のために安定しているとみなされている車輪の回転速度により決まる。磁力計31は、特性の特性点の発生を表す角度α1 (図10B )の応答を与える。上昇h (図10C )は、角度ψの変化(α0 +α1 )から導き出され得る。前の実施形態と比較すると、上昇の評価を考慮するための角度ψは、車輪軸に関する垂直方向51の一側でのみ広がり狭くなる。
【0062】
図10B,10C では、車輪は、第1回目及び第2回目の回転でのアイドル位置(角度ψ0 、距離0)に対して、第3回目及び第4回目の回転(角度ψr 、距離−dr )で上方に移動し、第5回目の回転(角度ψd 、距離+dd )で下方に移動すると仮定されている。
【0063】
2つの磁気センサが設けられている実施形態でのように、2つの磁気センサの応答間の時間的推移が利用され、非磁性センサ35の応答はここでは基準を与えている。
【0064】
いずれの実施形態でも、角度ψ又は角度α1 の変化からの上昇h の取得は、(例えば、訓練法(training procedure)による)サンプリングを必要とするか、又はセンサの位置とアイドル状態での(車輪の)回転軸の角度位置とを考慮した幾何学的な計算を必要とする。
【0065】
しかしながら、測定を可能にするためには車輪は回転する必要がある。
【0066】
特性で使用される特性点がセンサ31とセンサ32とで異なる(例えば、センサ31では最小値であり、センサ32では最大値である)場合であっても、特性でのこれらの特性点間の距離の決定は、計算を可能にするには十分である。
【0067】
別の代替的な実施形態によれば、第3のセンサ(磁力計)が別の角度位置を測定するために使用される。従って、測定で得られた更なる結果により正確さが実現される。
【0068】
述べられた実施形態の利点は、既存のタイヤを修正する必要がないことである。更に、述べられた実施形態は、非磁性センサが設けられている実施形態では車輪に既に設けられている角度センサを使用するという条件では、既存のリム及びハブを修正する必要がない。
【0069】
更に、評価がフレームに対する回転軸の位置に関して行なわれるので、測定はタイヤ圧とは無関係である。タイヤの空気が抜かれる場合、タイヤとセンサとの距離が増大するので、測定された信号の振幅は減少するが、磁気特性は最大値及び最小値を維持する。
【0070】
タイヤ(より一般的には車輪)の金属ベルトの残留磁気は、タイヤの寿命中に変化する危険性がある。これは、車輪の外周で測定可能な磁場が常に特性点(最大値及び最小値)を有するので、本発明の処理では影響を及ぼさない。更に、少なくとも2つの磁力計が設けられている実施形態では、システムの適応が自動的である。単一の磁気センサが設けられている実施形態では、システムの周期的なサンプリングを調整する必要があり、必要ならば、基準位置と特性点との距離を調整する必要がある。
【0071】
変形例として、タイヤは、製造中にタイヤに不均一な磁化を与える制御された磁場を受ける。このため、磁化を増大させることが可能になり、従って、磁力計によって検出される信号の強度を増大させることが可能になる。更に、必要に応じて、磁化がシヌソイド形状の特性を発生させてもよい。このため、検出された信号間の位相シフトの測定から上昇を測定することがより簡単になる。
【0072】
尚、磁力計は地磁界を検出する。これは、車輪の回転毎の信号を中心に集中させることにより特性の直流成分を抑えることが可能であるので、評価に影響を及ぼさない。
【0073】
本発明は、車輪への適用に関連してより具体的に述べられているが、回転要素が、上昇の測定が望まれている軸に垂直な面で固定された磁力計によって検出されるべき十分な振幅を有し、回転要素の角度位置に応じて変わる磁気特性を有する場合、本発明はより一般的に適用される。特に、この上昇は、所与の方向であるという条件では、必ずしも垂直方向である必要はない。更に、磁化の可変特性は、中実状の円柱での磁化の不均一性に起因する場合がある。このような不均一性は、円柱の内部、又は円柱の表面の凹凸から生じる場合がある。
【0074】
例えば、このような決定は、中実状の金属ローラの磁気特性がその全周に亘って変わるという条件では金属ローラに対して行われてもよい。従って、本発明は、産業設備の機械のローラの回転軸へのこの回転軸に垂直な平面での距離の変化を測定するために使用されてもよい。
【0075】
様々な変形例を備えた様々な実施形態が上述されている。尚、当業者は、いかなる進歩性を有するステップも示さずに、これらの様々な実施形態及び変形例の様々な要素を組み合わせてもよい。更に、本発明の実際的な実施と、センサの制御、及び適した手段による測定結果の格納及び処理を組織化すべく適切にプログラムされたか又は構成されたコンピュータ手段又は電子計算機によって行なわれるべき計算とは、上記に与えられた機能表示に基づく当業者の技能の範囲内である。
【特許請求の範囲】
【請求項1】
対象物(2) の回転軸(A) に垂直な面における点に対する前記回転軸の距離(h) の変化を測定するためのシステムにおいて、
前記回転軸の周りの前記対象物の角度位置を表す情報の測定が可能な少なくとも2つのセンサ(31,32; 31,35)を備えており、
該センサの内の少なくとも、前記点に対して固定された位置に設けられた第1のセンサ(31)は、対象物の全周に亘って可変な磁化を有する前記対象物によって放出される磁場の測定が可能な磁力計を有しており、
前記システムは、前記対象物の回転毎に、前記回転軸(A) に対する前記センサ間の角距離(ψ)の変化に基づき前記距離(h) の変化を決定するための手段(4) を更に備えており、
該手段は、前記少なくとも2つのセンサの応答間の時間的推移を使用することを特徴とするシステム。
【請求項2】
前記手段(4) は、前記第1のセンサ(31)の応答信号から、前記対象物(2) の回転毎に少なくとも1つの第1の特徴的な磁気振幅(m) を検出することを特徴とする請求項1に記載のシステム。
【請求項3】
前記点に対して固定された位置に設けられた少なくとも1つの第2のセンサ(32)が、第2の磁力計を有しており、
前記少なくとも2つのセンサは前記点と一列に並んでいないことを特徴とする請求項2に記載のシステム。
【請求項4】
前記手段(4) は、前記第2のセンサ(32)の応答信号から、前記第1の特徴的な磁気振幅(m) を検出することを特徴とする請求項3に記載のシステム。
【請求項5】
前記手段(4) は、前記センサの夫々の応答から前記第1の特徴的な磁気振幅(m)の発生間の時間間隔を評価し、該時間間隔から前記角距離(ψ)の変化を導き出すことを特徴とする請求項3に記載のシステム。
【請求項6】
前記回転軸(A) に対して固定された位置に設けられた第2のセンサ(35)が、前記対象物(2) の基準角度位置(α0)を決定することを特徴とする請求項2に記載のシステム。
【請求項7】
前記手段(4) は、前記第1のセンサ(31)の応答における前記第1の特徴的な磁気振幅(m) を表す位置と前記基準角度位置との角距離(ψ)の変化を評価することを特徴とする請求項6に記載のシステム。
【請求項8】
車輪(2) の垂直方向への上昇(h)の測定に適用されることを特徴とする請求項1に記載のシステム。
【請求項9】
対象物(2) の回転軸(A) に垂直な面における点に対する前記回転軸の距離(h) の変化を測定するためのシステムにおいて、
前記点に対して固定された位置に設けられ、対象物の全周に亘って可変な磁化を有する前記対象物により放出される磁場の測定が可能な磁力計を有する第1のセンサ(31)により、前記回転軸の周りの前記対象物の角度位置を表す第1の情報を測定するステップと、
第2のセンサ(32,35)により、前記回転軸の周りの前記対象物の角度位置を表す第2の情報を測定するステップと、
前記第1及び第2のセンサの応答間の時間的推移を使用して、前記対象物の回転毎に、前記回転軸(A) に対する前記第1及び第2のセンサ間の角距離(ψ)の変化を評価するステップと、
前記角距離(ψ)の変化から前記距離(h) の変化を導き出すステップと
を有することを特徴とするシステム。
【請求項1】
対象物(2) の回転軸(A) に垂直な面における点に対する前記回転軸の距離(h) の変化を測定するためのシステムにおいて、
前記回転軸の周りの前記対象物の角度位置を表す情報の測定が可能な少なくとも2つのセンサ(31,32; 31,35)を備えており、
該センサの内の少なくとも、前記点に対して固定された位置に設けられた第1のセンサ(31)は、対象物の全周に亘って可変な磁化を有する前記対象物によって放出される磁場の測定が可能な磁力計を有しており、
前記システムは、前記対象物の回転毎に、前記回転軸(A) に対する前記センサ間の角距離(ψ)の変化に基づき前記距離(h) の変化を決定するための手段(4) を更に備えており、
該手段は、前記少なくとも2つのセンサの応答間の時間的推移を使用することを特徴とするシステム。
【請求項2】
前記手段(4) は、前記第1のセンサ(31)の応答信号から、前記対象物(2) の回転毎に少なくとも1つの第1の特徴的な磁気振幅(m) を検出することを特徴とする請求項1に記載のシステム。
【請求項3】
前記点に対して固定された位置に設けられた少なくとも1つの第2のセンサ(32)が、第2の磁力計を有しており、
前記少なくとも2つのセンサは前記点と一列に並んでいないことを特徴とする請求項2に記載のシステム。
【請求項4】
前記手段(4) は、前記第2のセンサ(32)の応答信号から、前記第1の特徴的な磁気振幅(m) を検出することを特徴とする請求項3に記載のシステム。
【請求項5】
前記手段(4) は、前記センサの夫々の応答から前記第1の特徴的な磁気振幅(m)の発生間の時間間隔を評価し、該時間間隔から前記角距離(ψ)の変化を導き出すことを特徴とする請求項3に記載のシステム。
【請求項6】
前記回転軸(A) に対して固定された位置に設けられた第2のセンサ(35)が、前記対象物(2) の基準角度位置(α0)を決定することを特徴とする請求項2に記載のシステム。
【請求項7】
前記手段(4) は、前記第1のセンサ(31)の応答における前記第1の特徴的な磁気振幅(m) を表す位置と前記基準角度位置との角距離(ψ)の変化を評価することを特徴とする請求項6に記載のシステム。
【請求項8】
車輪(2) の垂直方向への上昇(h)の測定に適用されることを特徴とする請求項1に記載のシステム。
【請求項9】
対象物(2) の回転軸(A) に垂直な面における点に対する前記回転軸の距離(h) の変化を測定するためのシステムにおいて、
前記点に対して固定された位置に設けられ、対象物の全周に亘って可変な磁化を有する前記対象物により放出される磁場の測定が可能な磁力計を有する第1のセンサ(31)により、前記回転軸の周りの前記対象物の角度位置を表す第1の情報を測定するステップと、
第2のセンサ(32,35)により、前記回転軸の周りの前記対象物の角度位置を表す第2の情報を測定するステップと、
前記第1及び第2のセンサの応答間の時間的推移を使用して、前記対象物の回転毎に、前記回転軸(A) に対する前記第1及び第2のセンサ間の角距離(ψ)の変化を評価するステップと、
前記角距離(ψ)の変化から前記距離(h) の変化を導き出すステップと
を有することを特徴とするシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6A−6B.8A−8F】

【図7】
【図9】
【図10A−10C】
【図2】
【図3】
【図4】
【図5】
【図6A−6B.8A−8F】
【図7】
【図9】
【図10A−10C】
【公表番号】特表2012−523556(P2012−523556A)
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−504057(P2012−504057)
【出願日】平成22年4月8日(2010.4.8)
【国際出願番号】PCT/FR2010/050677
【国際公開番号】WO2010/116094
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(507362786)コミサリア ア エナジー アトミック エ オックス エナジーズ オルタネティヴ (22)
【Fターム(参考)】
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成22年4月8日(2010.4.8)
【国際出願番号】PCT/FR2010/050677
【国際公開番号】WO2010/116094
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(507362786)コミサリア ア エナジー アトミック エ オックス エナジーズ オルタネティヴ (22)
【Fターム(参考)】
[ Back to top ]