
回転角・トルクセンサ

【課題】軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1乃至第4の磁気センサ10〜13と、第1のシャフト4の回転に応じて、第1及び第3の磁気センサ10,12の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2及び第4の磁気センサ11,13の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第3の磁界センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角とトルクとを算出する演算回路30とを備え、第1周期数と前記第2周期数とは互いに異なることを特徴とする。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1乃至第4の磁気センサ10〜13と、第1のシャフト4の回転に応じて、第1及び第3の磁気センサ10,12の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2及び第4の磁気センサ11,13の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第3の磁界センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角とトルクとを算出する演算回路30とを備え、第1周期数と前記第2周期数とは互いに異なることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は回転角・トルクセンサに関し、特に回転角センサとトルクセンサを一体化した回転角・トルクセンサに関する。
【背景技術】
【0002】
近年、自動車などの車両に関して、電動パワーステアリング装置(EPS)及び横滑り防止装置(ESC)の両方を装備するケースが増加している。
【0003】
EPSは、運転手の操舵を補助する装置である。EPSでは、ステアリングと車軸をつなぐステアリング軸に、バネの一種であるトーションバーが設けられる。運転手が舵輪を回転させるとステアリング軸を通じて車軸に回転が伝えられるが、トーションバーの作用により、ステアリングと車軸の回転力に一定の差(トルク)が生ずる。EPSは、このトルクを検出し、検出結果に応じた補助操舵力をステアリング軸に与えることにより、運転手の操舵を補助する。
【0004】
ESCは、急ハンドル時や滑りやすい路面を走行中に発生しがちな車両の横滑りを感知し、車両の進行方向を保つように、個々の車輪にブレーキをかける装置である。ESCは、ステアリングの操舵量及び操舵方向(所定の基準ポジションからの回転角。以下、「ステアリングの操舵角」という。)を検出し、検出結果に応じて各車輪のブレーキ制御を行うことで、車両の横滑りを防止する。
【0005】
EPSとESCの両方を搭載する車両には、トルクを検出するセンサ(トルクセンサ)と、ステアリングの操舵角を検出するセンサ(回転角センサ)という2つのセンサが必要となる。近年では、センサの占有スペースの縮小やセンサ自体の機能向上の観点からこれらのセンサの改良が進められており、そのうちのひとつとして、特許文献1,2に示されるような複合型のセンサ(以下、「回転角・トルクセンサ」という。)が検討されている。以下、特許文献1,2それぞれについて、トルクとステアリングの操舵角とを検出する方法を説明する。
【0006】
特許文献1に開示される技術では、それぞれトーションバーの両端に設置される第1及び第3の回転体と、第1の回転体に設けられた歯車に嵌合する歯車を有し、第1の回転体より低速に回転する第2の回転体とが用いられる。第1の回転体の外周面には、例えば15個のN極と15個のS極とが、等間隔をなして交互に配置されている。第3の回転体の外周面にも同様に、第1の回転体と同数のN極及びS極が、等間隔をなして交互に配置されている。これにより、第1及び第3の回転体の外周面近傍には、回動方向に沿って周期的な磁界が形成される。この磁界の周期数(1回転分の周期の数)は、第1及び第3の回転体の外周面にそれぞれ形成されるN極(S極)の数に等しくなる。第2の回転体については、その中心部に磁石が配置されている。
【0007】
第1〜第3の回転体それぞれの近傍には、第1〜第3の磁気センサが配置される。第1の回転体が回動すると、第1の磁気センサには磁界の変動が検出される。第1の磁気センサは、検出した磁界の変動に応じて変動する信号を生成し、出力する。こうして得られる信号を演算すると、第1の回転体の外周面近傍に形成される磁界の周期数と同一周期数の周期的な角度信号(以下、「電気角」という。)が得られる。第3及び第2の回転体についても、それぞれ第1の回転体と同様、第3及び第2の磁気センサの出力から電気角を得ることができる。第3の回転体の電気角は、第3の回転体の外周面近傍に形成される磁界の周期数と同一周期数の周期的な角度信号である。一方、第2の回転体の電気角は、特許文献1の記載によれば、第2の回転体の機械角(所定の基準ポジションからの物理的な回転角)720degの変化に対して180degの割合で変化する角度信号となる。
【0008】
トルクは、第1の回転体の電気角と第3の回転体の電気角の差にトーションバーの弾性定数を乗ずることで算出される。一方、ステアリングの操舵角は、第2の回転体の電気角及び第1の回転体の電気角から求められる。
【0009】
特許文献2に開示される技術では、トーションバーの一端にターゲット3a,3bが設けられ、他端にターゲット3cが設けられる。ターゲット3a,3cそれぞれの外周面には磁性体製の凸起が同数ずつ設けられ、ターゲット3bの外周面には、ターゲット3a,3cに設けられる凸起の個数と互いに素な個数の磁性体製の凸起が設けられる。トルクは、ターゲット3aの電気角とターゲット3cの電気角との差に基づいて算出される。ステアリングの操舵角は、ターゲット3aの電気角とターゲット3bの電気角とに基づいて求められる。
【0010】
ところで、トーションバーの両端に設置された2つの回転体には、回転軸に対する位置ずれ(以下、「軸ぶれ」という。)が生ずる場合がある。このような軸ぶれが発生すると、各回転体の電気角と機械角の関係が崩れることから、上記特許文献1,2に開示される構成では、トルクやステアリングの操舵角を正しく算出することができなくなってしまう。
【0011】
特許文献3には、電動モータ付き自転車のペダル踏力の検出装置(トルクセンサ)の例ではあるが、上記のような軸ぶれの影響をキャンセルできる技術が開示されている。この技術では、第1及び第2の磁性リング(回転体)それぞれについて、その外周付近の互いに180度異なる位置に2つの磁気センサを対向配置する。そして、これら2つの磁気センサの出力を用いて、軸ぶれの影響をキャンセルしている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2006−220529号公報
【特許文献2】特開2003−270062号公報
【特許文献3】特開平11−258079号公報
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、特許文献3に開示される検出装置はトルクセンサとしての機能のみを有する単機能センサである。第1の磁性リング(又は第2の磁性リング)の電気角を求めることはできるが、機械角を求めることができない。したがって、この検出装置を回転角センサとして用いることはできない。
【0014】
したがって、本発明の目的の一つは、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを提供することにある。
【課題を解決するための手段】
【0015】
上記目的を達成するための本発明による回転角・トルクセンサは、回転軸の周りを回動可能に構成された第1のシャフトと、前記回転軸の周りを回動可能に構成された第2のシャフトと、前記回転軸に沿って配置され、前記第1のシャフトと前記第2のシャフトとを接続するトーションバーと、それぞれ前記回転軸に対して固定された第1乃至第4の磁気センサと、前記第1のシャフトの回転に応じて、前記第1及び第3の磁気センサの位置に第1周期数の周期的な第1の磁界を生成する第1の磁界生成手段と、前記第2のシャフトの回転に応じて、前記第2及び第4の磁気センサの位置に第2周期数の周期的な第2の磁界を生成する第2の磁界生成手段と、前記第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、前記第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて前記第1及び第2のシャフトそれぞれの機械角を算出するとともに、算出した前記第1及び第2のシャフトそれぞれの前記機械角に基づいて前記第1のシャフトにかかるトルクを算出する演算手段とを備え、前記第1周期数と前記第2周期数とは互いに異なることを特徴とする回転角・トルクセンサ。
【0016】
本発明によれば、第1及び第2のシャフトそれぞれの機械角を算出する際には、第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて算出を行うこととしたとともに、第1周期数と第2周期数とが互いに異なることとしたので、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を実現できる。
【0017】
上記回転角・トルクセンサにおいて、前記第1周期数が偶数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、前記第1周期数が奇数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置からさらに前記第1の磁界の半周期分ずれた位置に配置され、前記第2周期数が偶数である場合、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、前記第2周期数が奇数である場合、前記第4の磁界センサは、前記第3の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置からさらに前記第2の磁界の半周期分ずれた位置に配置され、前記第1及び第2の演算はともに加算演算であることとしてもよい。
【0018】
また、上記回転角・トルクセンサにおいて、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、前記第1周期数が偶数である場合、前記第1の演算は加算演算であり、前記第1周期数が奇数である場合、前記第1の演算は差動演算であり、前記第2周期数が偶数である場合、前記第2の演算は加算演算であり、前記第2周期数が奇数である場合、前記第2の演算は差動演算であることとしてもよい。
【0019】
また、上記各回転角・トルクセンサにおいて、前記演算手段は、前記第1及び第3の磁界センサの出力に前記第1の演算を施すことにより得られる前記演算出力に基づいて前記第1のシャフトの電気角を算出し、前記第2及び第4の磁界センサの出力に前記第2の演算を施すことにより得られる前記演算出力に基づいて前記第2のシャフトの電気角を算出し、前記第1のシャフトの電気角と前記第2のシャフトの電気角との差分を示す電気角差信号を生成し、前記電気角差信号と前記第1のシャフトの前記電気角と前記第1周期数とに基づいて前記第1のシャフトの機械角を算出し、前記電気角差信号と前記第2のシャフトの前記電気角と前記第2周期数とに基づいて前記第2のシャフトの機械角を算出することとしてもよい。
【0020】
また、上記回転角・トルクセンサにおいて、前記第1の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第1及び第2の磁気抵抗素子を有し、前記第1及び第2の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記第2の磁界センサは、前記第2のシャフトの回動方向に沿って並置された第3及び第4の磁気抵抗素子を有し、前記第3及び第4の磁気抵抗素子は、前記第2の磁界の1/4周期分互いに離隔した位置に設置され、前記第3の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第5及び第6の磁気抵抗素子を有し、前記第5及び第6の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記第4の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第7及び第8の磁気抵抗素子を有し、前記第7及び第8の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記演算手段は、前記第1及び第3の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力と、前記第5及び第6の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力とに基づいて前記第1のシャフトの前記電気角を算出するとともに、前記第2及び第4の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力と、前記第7及び第8の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力とに基づいて前記第2のシャフトの前記電気角を算出することとしてもよい。
【発明の効果】
【0021】
本発明によれば、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを実現できる。
【図面の簡単な説明】
【0022】
【図1】本発明の第1の実施の形態による回転角・トルクセンサの断面構造を示す図である。
【図2】本発明の第1の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図3】GMR素子を通過する磁束密度と、GMR素子の出力信号との関係を示す図である。
【図4】本発明の第1の実施の形態による演算回路内部の機能ブロックを示す図である。
【図5】(a)は、本発明の第1の実施の形態による出力信号の具体的な例を示す図である。(b)は、本発明の第1の実施の形態による電気角算出部の演算途中で得られる信号の波形を示す図である。
【図6】本発明の第1の実施の形態による電気角算出部の演算途中で得られる信号の波形を示す図である。
【図7】本発明の第1の実施の形態の変形例による回転角・トルクセンサの概略構成を示す説明図である。
【図8】横軸をステアリングの機械角とし、縦軸を電気角として、本発明の第1の実施の形態による電気角及び電気角差信号をプロットした図である。
【図9】(a)(b)は、メモリーに記録した演算値と操舵角の関係を利用して機械角を求める変形例の説明図である。
【図10】(a)(b)はそれぞれ、トルクが+1deg,−1degである場合における、第1及び第2のシャフトの各電気角、電気角差信号、及び小数点を切り捨てた第1の周期数判定信号を表す図である。
【図11】本発明の第2の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図12】本発明の第3の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図13】(a)(b)は、本発明の第3の実施の形態による信号合成増幅回路の出力信号を示す図である。(c)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角及び電気角差信号をプロットした図である。
【図14】トルクが+,0,−である場合における、第1及び第2のシャフトの電気角、及び電気角差信号を示す図である。
【図15】磁石ローターの軸ぶれについて説明するための説明図である。
【図16】(a)(b)はそれぞれ、図15の各状態での磁気抵抗素子からの出力信号を示す図である。
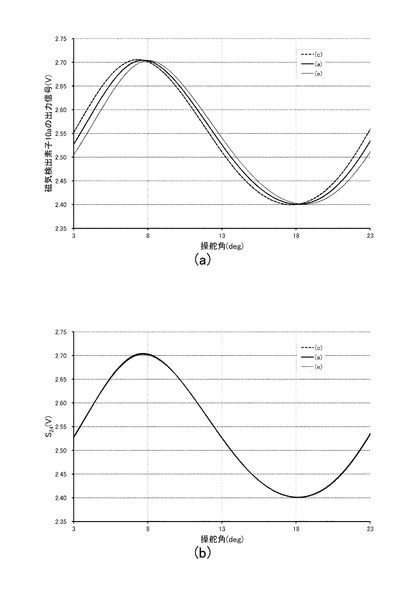
【図17】(a)は、軸ぶれによる影響を受けた磁気抵抗素子からの出力信号の実測値を示す図である。(b)は、信号合成増幅回路で合成された信号の実測値を示す図である。
【図18】周期数が奇数である磁石ローターの平面図である。
【図19】本発明の第4の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図20】(a)は、本発明の第4の実施の形態による信号合成増幅回路の出力信号を示す図である。(b)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角及び電気角差信号をプロットした図である。
【図21】本発明の第5の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図22】本発明の第6の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図23】(a)は、図2に示した回転角・トルクセンサ(ただし、磁石ローターの周期数は5とした。)において、第1のシャフトをCW(時計回り)方向及びCCW(反時計回り)方向にそれぞれ回転させた場合の、磁気抵抗素子からの出力信号(実測値)を示す図である。(b)は、(a)の一部を拡大した図である。
【発明を実施するための形態】
【0023】
以下、添付図面を参照しながら、本発明の好ましい実施の形態について詳細に説明する。
【0024】
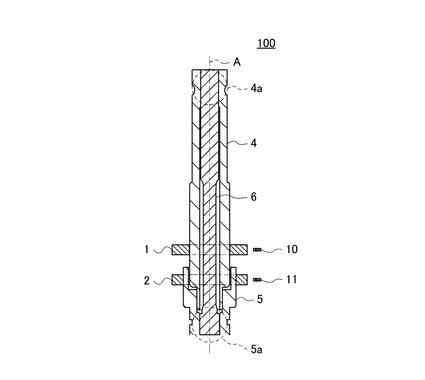
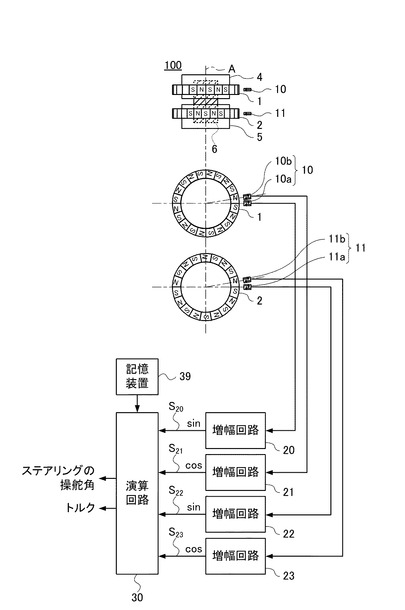
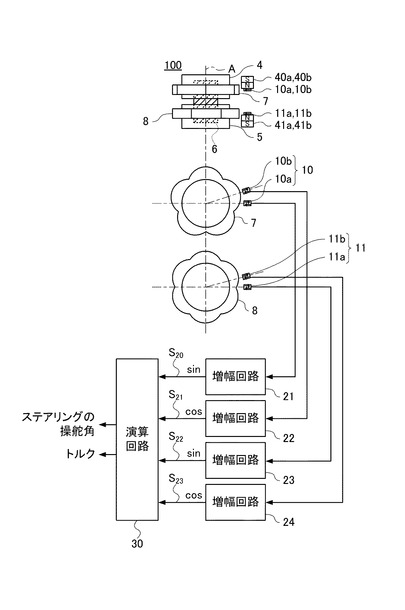
図1は、本発明の第1の実施の形態による回転角・トルクセンサ100の断面構造を示す図である。同図に示すように、回転角・トルクセンサ100は、それぞれ回転軸Aの周りを回動可能に構成された第1及び第2のシャフト4,5と、第1及び第2のシャフト4,5を接続するトーションバー6と、第1のシャフト4に対して固定された磁石ローター1(第1の磁界生成手段)と、第2のシャフト5に対して固定された磁石ローター2(第2の磁界生成手段)と、磁石ローター1から生ずる磁界(第1の磁界)を検出する第1の磁気センサ10と、磁石ローター2から生ずる磁界(第2の磁界)を検出する第2の磁気センサ11とを備えている。トーションバー6は、図示した領域4aにおいて第1のシャフト4と固着し、領域5aにおいて第2のシャフト5と固着している。また、第1及び第2の磁気センサ10,11は回転軸Aに対して固定されており、第1及び第2のシャフト4,5の回動に伴ってこれらが動くことはない。
【0025】
回転角・トルクセンサ100は自動車のステアリングと車軸の間に設けられる。つまり、図示していないが、第1のシャフト4がステアリングに、第2のシャフト5が車軸に、それぞれ接続されている。運転手がステアリングを回転させると、第1のシャフト4がステアリングとともに回転する。この回転はトーションバー6を介して第2のシャフト5に伝達し、さらに第2のシャフト5から車軸に伝達する。
【0026】
回転角・トルクセンサ100は、電動パワーステアリング装置(EPS)が必要とするトルク(ステアリングと車軸の回転角の差)と、横滑り防止装置(ESC)が必要とするステアリングの操舵角とを検出可能に構成されている。概略を説明すると、回転角・トルクセンサ100は、まず、第1及び第2の磁気センサ10,11の出力に基づいて、第1及び第2のシャフト4,5それぞれの機械角(所定の基準ポジションからの物理的な回転角)を算出する。こうして求められる第1のシャフト4の機械角は、ステアリングの操舵角として出力される。回転角・トルクセンサ100はさらに、算出した第1及び第2のシャフトそれぞれの機械角に基づいて、第1のシャフト4(又は第2のシャフト5)にかかるトルクを算出する。以下、トルクとステアリングの操舵角とを検出するための具体的な構成及び演算方法について、詳しく説明する。
【0027】
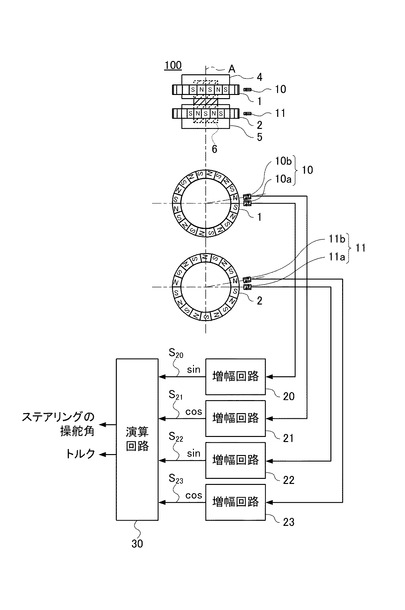
図2は、本発明の第1の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。同図は、図1に示した回転角・トルクセンサ100を簡略化して描いた模式図と、磁石ローター1,2の平面図と、回転角・トルクセンサ100の機能ブロック図とを含んでいる。
【0028】
磁石ローター1,2はそれぞれ、図2に示すように、外周面にN極とS極とが交互に現れるように着磁された、リング形状の多極磁石である。磁石ローター1は第1のシャフト4と一体となって回転し、磁石ローター2は第2のシャフト5と一体となって回転する。磁石ローター1,2に使用される磁石としては、例えば、フェライト系、アルニコ系、サマリウムコバルト系、ネオジム系、ボンドマグネットなどが好適である。
【0029】
磁石ローター1は、回転軸に垂直な平面に回転軸を中心に円を描いた時の円周方向に、10対の磁極ペアを有している。これら10対の磁極ペアのサイズ(ピッチ)は互いに同一である。磁石ローター1がこのような構成を有することにより、第1のシャフト4の周囲には、その回動方向に沿って周期数10(第1周期数)の周期的な磁界(第1の磁界)が生成される。言い換えると、磁石ローター1は、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数の周期的な第1の磁界を生成する。ここで、周期数とは、1回転分の周期の数である。磁石ローター1の磁極ペアが10対である場合には、第1のシャフト4が1回転する間に、第1の磁気センサ10では10周期分の磁界変動が観測される。したがって、第1の磁界の周期数は10となる。
【0030】
磁石ローター2は、回転軸に垂直な平面に回転軸を中心に円を描いた時の円周方向に、9対の磁極ペアを有する。これら9対の磁極ペアのサイズ(ピッチ)も互いに同一である。磁石ローター2がこのような構成を有することにより、第2のシャフト5の周囲には、その回動方向に沿って周期数9(第2周期数)の周期的な磁界(第2の磁界)が生成される。言い換えると、磁石ローター2は、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数の周期的な第2の磁界を生成する。
【0031】
なお、ここでは第1周期数と第2周期数がそれぞれ10,9である場合を示しているが、第1周期数及び第2周期数の値はこれに何ら限定されるものではなく、少なくとも互いに異なっていればよい。より好ましくは、第1周期数と前記第2周期数とが互いに素であることが好ましい。また、第1周期数と前記第2周期数との差は1であることが好ましい。
【0032】
第1の磁気センサ10は、図2に示すように、2つの磁気抵抗素子10a,10b(第1及び第2の磁気抵抗素子)から構成される。磁気抵抗素子10a,10bは第1のシャフト4の回動方向に沿って、磁石ローター1と同一平面内に並置されており、その間隔は第1の磁界の1/4周期分となっている。言い換えると、磁気抵抗素子10a,10bは、第1の磁界の1/4周期分互いに離隔した位置に設置される。ここでは第1周期数が10であるので、第1の磁界の1/4周期分は、回転角にして9degに相当する。
【0033】
第2の磁気センサ11も、同様に、2つの磁気抵抗素子11a,11b(第3及び第4の磁気抵抗素子)から構成される。磁気抵抗素子11a,11bは第2のシャフト5の回動方向に沿って並置されており、その間隔は第2の磁界の1/4周期分となっている。言い換えると、磁気抵抗素子11a,11bは、第2の磁界の1/4周期分互いに離隔した位置に設置される。ここでは第2周期数が9であるので、第2の磁界の1/4周期分は、回転角にして10degに相当する。
【0034】
なお、磁気抵抗素子10a〜11bは、互いに区別するために異なる符号を付してあるが、実質的には全て同一の構成を有している。このため、以下の説明において個々の磁気抵抗素子を区別する必要がない場合には、単に磁気抵抗素子と称する。後掲の磁気抵抗素子12aなどについても同様である。
【0035】
磁気抵抗素子10a,10b,11a,11bとして具体的には、GMR素子、MR素子、AMR素子、TMR素子などを用いることが好適である。各磁気抵抗素子は、ハーフブリッジ構成としてもよく、或いはフルブリッジ構成としてもよい。
【0036】
GMR素子について特に説明すると、GMR素子である磁気抵抗素子は、磁化方向が特定の方向に設定されていて、外部磁界の変位に対して磁化状態(例えば、磁化方向や磁化の強さ)が影響を受けないように構成されたピン磁性層と、外部磁界の変化によって磁化状態が変位するフリー磁性層とを備えている。磁石ローター1,2が回転すると、磁石ローター1,2から磁気抵抗素子に影響を与える磁束のベクトルが、回転に応じた周期的な変化を呈する。このベクトルの変化によって磁気抵抗素子内のフリー磁性層の磁化状態が変動し、磁化状態が変動しないピン磁性層の磁化状態と、磁化状態が変動するフリー磁性層との間に磁化状態の変位差が発生する。この磁化状態の変位差は、磁石ローター1,2の回転角度を反映する物理量であり、具体的には、磁気抵抗素子の抵抗値の変化として現れる。磁気抵抗素子にはバイアス電流が供給されており、磁気抵抗素子の抵抗値が変化すると、その両端の電圧が変化する。この電圧変化が、磁気抵抗素子の出力信号となる。
【0037】
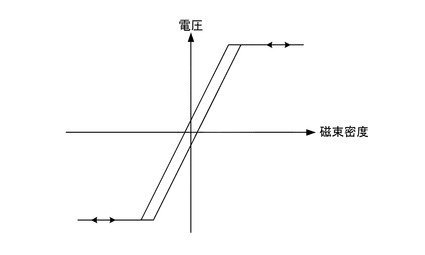
図3は、GMR素子を通過する磁束密度と、GMR素子の出力信号との関係を示す図である。本実施の形態による回転角・トルクセンサ100を設計する際には、GMR素子のヒステリシスの発生を少なくするため、GMR素子のフリー磁性層の長手方向とピン固定磁性層の磁化方向(ピン方向)とが直交するように設計するとともに、磁石ローター1,2からの磁束密度、又は後述する多極ローター(図10他)とGMR素子のギャップがGMR素子の出力に対応するように設計することが好ましい。なお、GMR素子が飽和する領域までの磁束密度をGMR素子に与えることで、GMR素子の抵抗値の変化を、磁束密度の変化には影響されない、磁石ローターからの磁束のベクトルの影響のみとすることが可能になる。
【0038】
磁石ローター1が回転すると、磁気抵抗素子10a,10bにおいて、回転に伴う磁束ベクトルの変化に応じた、フリー磁性層の磁化状態の変動が発生する。このため、磁化状態が変動しないピン磁性層の磁化状態との間に磁化状態の変位差が発生し、これが、磁気抵抗素子10a,10bの抵抗値の変化として現れる。上述したように、各磁気抵抗素子にはバイアス電流が供給されており、その抵抗値の変化は、出力信号の変化として検出される。
【0039】
磁気抵抗素子10a,10bからの出力信号は、磁石ローター1の回転に伴う磁束ベクトルの変化に応じて変化し、その波形は概ね正弦波となる。つまり、磁気抵抗素子10a,10bからの出力信号は略正弦波信号である。磁石ローター1が1回転する間に、磁気抵抗素子10a,10bからは、第1周期数分の略正弦波信号が出力される。
【0040】
磁気抵抗素子11a,11bについても同様である。すなわち、磁気抵抗素子11a,11bからの出力信号は略正弦波信号となり、磁石ローター2が1回転する間に、磁気抵抗素子11a,11bからは、第2周期数分の略正弦波信号が出力される。
【0041】
さて、回転角・トルクセンサ100は、図2の機能ブロック図に示すように、4つの増幅回路20〜23と、演算回路30(演算手段)とを備えている。増幅回路20〜23はそれぞれ磁気抵抗素子10a,10b,11a,11bから出力される信号を所定の増幅率で増幅し、演算回路30に出力する回路である。以下では、ステアリングシャフトの回転に伴って増幅回路20〜23から出力される信号を、それぞれ出力信号S20,S21,S22,S23と称する。出力信号S20,S21,S22,S23は、略正弦波状の振幅を有する信号となる。
【0042】
磁気抵抗素子10a,10bが上記のような配置を有することから、出力信号S20と出力信号S21とでは、位相が90deg異なることになる。つまり、出力信号S20が正弦波(sin)であるとすると、出力信号S21は余弦波(cos)となる。同様に、出力信号S22と出力信号S23とでも、位相が90deg異なることになる。つまり、出力信号S22が正弦波(sin)であるとすると、出力信号S23は余弦波(cos)となる。
【0043】
演算回路30は、出力信号S20,S21に基づいて第1のシャフト4の電気角φ1(対応する磁石ローターによって生成される磁界の周期数と同一周期数の周期的な角度信号)を検出するとともに、出力信号S22,S23に基づいて第2のシャフト5の電気角φ2を検出する。そして、これら電気角φ1,φ2に所定の演算を施すことにより、第1のシャフト4の機械角θ1と第2のシャフト5の機械角θ2とを求め、最終的には、ステアリングの操舵角とトルクとを算出する。以下、具体的な演算の方法について、図面を参照しながら詳しく説明する。
【0044】
図4は、演算回路30内部の機能ブロックを示す図である。同図に示すように、演算回路30は、電気角算出部31,32、電気角差信号生成部33、周期数判定信号生成部34,35、機械角算出部36,37、トルク算出部38を有している。
【0045】
電気角算出部31は、出力信号S20,S21に基づいて第1のシャフト4の電気角φ1を算出する機能部である。以下、具体的な出力信号S20,S21の具体的な信号波形を参照しながら、電気角算出部31の処理について詳しく説明する。
【0046】
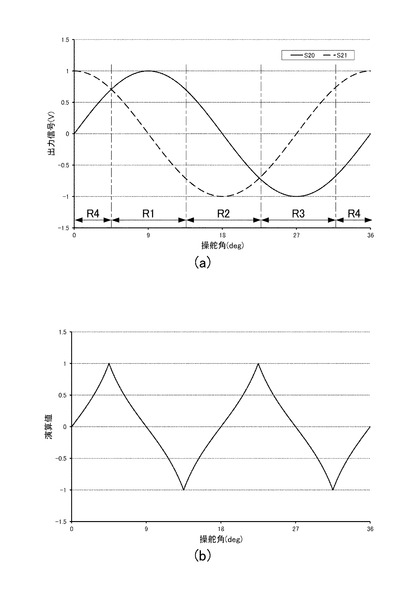
図5(a)は、出力信号S20,S21の具体的な例を示す図である。図5(b)及び図6は、電気角算出部31の演算途中で得られる信号の波形を示す図である。各図において、横軸の「操舵角」は、ステアリングの操舵角を表している。
【0047】
運転手がステアリングを回転させると、つまり、第1のシャフト4が回転すると、図5(a)に示すように、sinに近似した信号S20が増幅回路20から出力される。また、信号S20と位相が90deg異なる信号S21(cosに近似した信号)が増幅回路21より出力される。
【0048】
電気角算出部31は、信号S20(第1の出力信号)と信号S21(第2の出力信号)とから、第1のシャフトの電気角φ1を求めて出力する。具体的には、次のようにして電気角φ1を算出する。すなわち、まず、信号S20と信号S21とを絶対値で比較し、信号S21の絶対値の方が大きい場合には、第1の出力信号を第2の出力信号で除した結果S20/S21(tanに近似した信号)を、信号S20の絶対値の方が大きい場合には、第2の出力信号を第1の出力信号で除した結果S21/S20(1/tanに近似した信号)を算出する。図5(b)は、この算出の結果得られる演算値を示している。
【0049】
得られた演算値は、図5(b)から明らかなように、電気角φ1と一対一対応していない。したがって、この演算値から電気角φ1を直接求めることはできない。そこで、電気角算出部31は、図5(a)に示す範囲R1〜R4ごとに異なる数値を上記演算値に加算することで、演算値と電気角φ1とが一対一に対応するようにしている。
【0050】
具体的には、信号S20と信号S21が範囲R1にある場合、すなわち信号S20の絶対値が信号S21の絶対値より大きく、かつ信号S20が0より大きい場合には、S21/S20に所定値3(第1の値)を加算してなるS21/S20+3(第1の演算値)を演算結果とする。信号S20と信号S21が範囲R2にある場合、すなわち信号S21の絶対値が信号S20の絶対値より大きく、かつ信号S21が0より小さい場合には、S20/S21に所定値5(第2の値)を加算してなるS20/S21+5(第2の演算値)を演算結果とする。信号S20と信号S21が範囲R3にある場合、すなわち信号S20の絶対値が信号S21の絶対値より大きく、かつ信号S20が0より小さい場合には、S21/S20に所定値7(第3の値)を加算してなるS21/S20+7(第3の演算値)を演算結果とする。その他の場合、すなわち信号S20と信号S21が範囲R4にある場合には、S20/S21に所定値1(第4の値)を加算してなるS20/S21+1(第4の演算値)を演算結果とする。
【0051】
図6は、以上のようにして求められる演算値を示している。同図から明らかなように、この演算値は電気角と一対一対応している。したがって、演算値から電気角φ1を求めることが可能になる。電気角算出部31は、こうして求めた電気角φ1を出力する。
【0052】
電気角算出部32は、信号S22と信号S23とから、第2のシャフトの電気角φ2を求めて出力する。電気角算出部32の処理は、上述した電気角算出部31の処理と同様であるから、詳しい説明は割愛する。
【0053】
なお、図6に示す演算値を求める際、上記説明では、S20/S21又はS21/S20に最低でも1を足しているが、これは、演算値が負数にならないようにするためである。負数になっても構わない場合には、S20/S21又はS21/S20に加算する数値をより小さな値としてもよい。
【0054】
また、ここでは出力信号から一旦tan信号を算出することで電気角φ1,φ2を求めたが、もちろん、sin信号又はcos信号から直接電気角φ1,φ2を求めてもよい。電気角φ1,φ2のうち一方をtan信号から算出し、他方をsin信号又はcos信号から直接算出することとしてもよい。第1のシャフト4の回転に応じて各増幅回路20〜23から出力される信号に対して電気角φ1,φ2が一意に決まるのであれば、どのような演算方法を用いてもよい。
【0055】
また、理想的な正弦波が出力されている場合は、上述した演算で確実に電気角φ1,φ2を求めることが可能となるが、実際の出力信号は、必ずしも理想的な正弦波形とはならない。そこで、演算値と電気角の関係をあらかじめテーブル化してメモリに記録し、メモリと演算値を照合することで、電気角を求めることとしてもよい。
【0056】
テーブル化を採用する変形例について、具体的に説明する。図7は、本変形例による回転角・トルクセンサ100の概略構成を示す図である。同図に示すように、本変形例による回転角・トルクセンサ100は、記憶装置39(記憶手段)を有する点で、図2に示した回転角・トルクセンサ100と異なっている。以下、図2に示した回転角・トルクセンサ100との相違点を中心に詳しく説明する。
【0057】
記憶装置39は、所定範囲の数値データと角度データとを一対一に対応付けたテーブルを記憶する。ここでいう所定範囲とは、図6に示した演算値(上述した第1〜第4の演算値)が取り得る値の最大値と最小値の間の範囲である。なお、記憶装置39は、電気角算出部31,32のそれぞれについて、上記テーブルを記憶することとしてもよい。
【0058】
上述したように、電気角算出部31は、信号S21,S21の値に応じて第1〜第4の演算値のいずれかを算出している。電気角算出部31は、こうして算出した各演算値に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ1の算出結果として出力する。
【0059】
上述した例に即してより具体的に説明すると、電気角算出部31は、信号S20と信号S21が範囲R1にある場合には、第1の演算値S21/S20+3を算出する。そして、この第1の演算値S21/S20+3に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ1の算出結果として出力する。詳しい説明は割愛するが、第2〜第4の演算値についても同様である。
【0060】
電気角算出部32も、電気角算出部31と同様の処理を行う。つまり、信号S22,S23の値に応じて第1〜第4の演算値のいずれかを算出し、算出した各演算値に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ2の算出結果として出力する。
【0061】
以上説明したように、演算値と電気角の関係をあらかじめテーブル化しておくことによっても、電気角φ1,φ2を求めることが可能になる。
【0062】
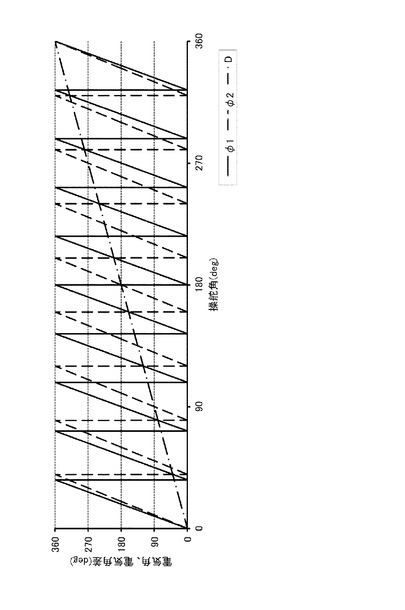
さて、図8は、横軸をステアリングの機械角とし、縦軸を電気角として、電気角φ1,φ2をプロットした図である。同図に示されるように、電気角φ1,φ2はそれぞれ、周期数10,9の周期信号となっている。これらの周期数は、磁石ローター1,2の外周面に設けられた磁極の数によって決まっている。
【0063】
電気角差信号生成部33は、第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2との差分を示す電気角差信号Dを生成して出力する。具体的には、φ1≧φ2である場合にはD=φ1−φ2により電気角差信号Dを生成し、それ以外の場合にはD=360deg+φ1−φ2により電気角差信号Dを生成する。
【0064】
図8には、トルクが0であると仮定した場合の電気角差信号Dも示している。同図に示すように、電気角差信号Dは、ステアリングの操舵角と一対一に対応している。このような一対一対応は、第1周期数と第2周期数を適切に選択することにより実現できる。仮にトルクが0であることが予め分かっているとするならば、電気角差信号Dから直接ステアリングの操舵角を求めることができる。
【0065】
しかし、実際にはトルクが0でない場合を想定しなければならないので、ステアリングの操舵角を求めるために、周期数判定信号生成部34,35以降の機能部において、さらなる演算処理を行う。この演算処理では、トルクも算出される。以下、詳しく説明する。
【0066】
周期数判定信号生成部34は、電気角差信号Dと第1のシャフト4の電気角φ1と第1周期数P1(=10)とに基づいて、第1の磁界の周期を示す第1の周期数判定信号J1を生成する。具体的には、まず、次の式(1)で表される信号J'1を算出し、算出した信号J'1に所定の数値nを加算することにより、第1の周期数判定信号J1を生成する。式で表すと、次の式(2)のようになる。数値n1を加算するのは、後の処理の便宜のためである。すなわち、数値n1を適切に選択することで、第1の周期数判定信号J1の小数点未満を切り捨てるだけで、基準ポジションからの第1のシャフト4の回転周期数を示す値が得られるようになる。ただし、式(2)の計算では、第1の周期数判定信号[J1]は0からP1+1までの値をとる。そのため、計算の結果[J1]=0となる場合は[J1]=P1と置き換え、[J1]=P1+1となる場合は[J1]=1と置き換えることが好ましい。数値n1の具体的な値としては、トルクがかからない状態でφ1=φ2=0となる場合には、1.5とすることが好ましい。トルクが発生する状態では、1.5からずれる値とすることとしてもよい。
【0067】
【数1】

【0068】
数値n1の具体的な値について、より詳しく説明する。例えば、トルクがかからない状態で電気角差信号Dが0となる場合の第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2の値をφEとする、すなわち、φ1=φ2=φEとすると、n1=(360−φE)/360+0.5+mとするとよい。ここで、mは任意の整数であり、計算機を用いた計算では0または1とすると都合がよい場合が多い。これ以外の方法でも、トルクが0の状態でJ1の小数点未満が0.5に近くなるようにn1を設定するのが望ましい。また、同時にJ1の整数部分が周期数または周期数から1を減じた値となるようにn1を設定するのが望ましい。それ以外の値でも周期数を求めることは可能であり、n1はこの値に限るものではない。
【0069】
機械角算出部36は、第1の周期数判定信号J1と第1のシャフト4の電気角φ1と第1周期数P1(=10)とに基づいて、第1のシャフト4の機械角θ1を算出する。具体的には、次の式(3)により、機械角θ1を算出する。[ ]はガウス記号であり、[ ]内の数字の小数点を切り捨てる演算を意味している。こうして求められる第1のシャフト4の機械角θ1は、ステアリングの操舵角に他ならない。
【0070】
【数2】
【0071】
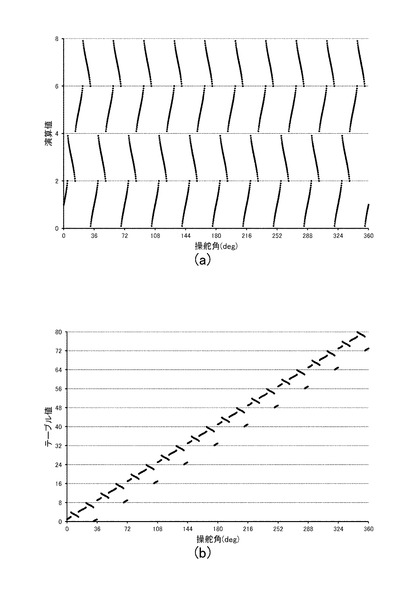
なお、実際には磁石ロータ1,2の精度には限界があるため、電気角周期ごとに機械角と入力信号の関係を予め記録して図示しないメモリーに格納し、上記[J1]の値から周期数を求め、周期数と入力信号より演算される値からメモリーを参照して、機械角θ1を求めてもよい。つまり、磁気抵抗素子10a,10b,11a,11bから得られる波形の電気角周期数に対する繰り返し精度が高ければ上記のような方法でも求めることができるが、繰り返し精度が悪い場合には、メモリーに記録した演算値と操舵角の関係を使用するとよい。具体的には、図6の演算値を、機械角1周に対して記録する。すると、図9(a)のような波形となる。その演算値に周期数×8を加えると、図9(b)の波形となる。図9(b)では、機械角1周分にわたって機械角と演算値とが1対1に対応しているので、演算値から機械角を精度よく求めることが可能となる。
【0072】
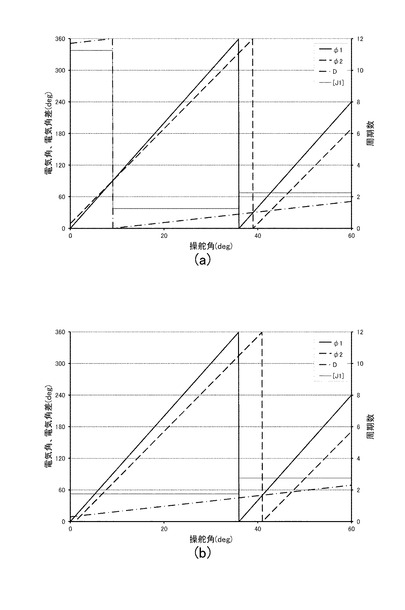
図10(a)(b)はそれぞれ、トルクが+1deg,−1degである場合における、第1及び第2のシャフト4,5の各電気角φ1,φ2、電気角差信号D、及び小数点を切り捨てた第1の周期数判定信号[J1]を表す図である。なお、同図に示す第1の周期数判定信号[J1]では、上述した置き換え(式(2)の計算の結果[J1]=0となる場合は[J1]=P1と置き換え、[J1]=P1+1となる場合は[J1]=1と置き換える。)を行っている。
【0073】
図10(a)(b)に示されるように、小数点を切り捨てた第1の周期数判定信号[J1]は、トルクの値によらず、第1のシャフト4の電気角φ1が360degから0degに変化するところで1段上がる階段状関数となっている。このことは、第1の周期数判定信号[J1]が、基準ポジションからの第1のシャフト4の回転周期数を表していことを示している。したがって、第1の周期数判定信号[J1]を用いることで、第1のシャフト4の機械角θ1を算出することが可能になっている。
【0074】
例えば、第1の周期数判定信号[J1]を用いることで、トルクが+1degの場合である図10(a)と−1degの場合である(b)でともに、φ1が操蛇角0〜36度で、周期数が1であると判定が可能となる。図10(a)のφ1が操蛇角8度近傍未満で第1の周期数判定信号[J1]が11となっているが、第1の周期数判定信号[J1]が第1周期数P1(=10)を超えた場合は、第1周期数P1(=10)を減じることとすることにより、0度から36度で第1の周期数判定信号[J1]は同じ値となる。よって、第1の周期数判定信号[J1]を用いることで、第1のシャフト4の機械角θ1を算出することが可能になっている。
【0075】
周期数判定信号生成部35の処理は、周期数判定信号生成部34と同様である。すなわち、周期数判定信号生成部35は、電気角差信号Dと第2のシャフト5の電気角φ2と第2周期数P2(=9)とに基づき、次の式(4)及び式(5)により、第2の磁界の周期を示す第2の周期数判定信号J2を生成する。そして、第2の周期数判定信号J2と第2のシャフト5の電気角φ2と第2周期数P2(=9)とに基づき、次の式(6)により、第2のシャフト5の機械角θ2を算出する。数値n2は、上述した数値n1と同様、トルクが0の状態でJ2の小数点未満が0.5に近くなるように設定することが望ましい。
【0076】
【数3】
【0077】
トルク算出部38は、以上のようにして算出された第1のシャフト4の機械角θ1と第2のシャフト5の機械角θ2とに基づいて、第1のシャフト4にかかるトルクを算出する。具体的には、機械角θ1と機械角θ2の差分θ1−θ2を算出し、トルクとして出力する。
【0078】
以上説明したように、本実施の形態による回転角・トルクセンサ100によれば、回転する磁界を生成するための磁界生成手段を2つだけ用いる回転角・トルクセンサを提供することが実現される。それゆえ、車両の省スペース化にも貢献できる。
【0079】
なお、以上の方法で求められるトルクには、検出可能範囲に制限がある。例えば、第1周期数P1=10、第2周期数P2=9である場合を例にとると、トルクの検出可能範囲は−2deg〜+2degとなる。これは、トルクがこの範囲を超えると周期数判定が正しくできなくなり、回転角・トルクが正しく検出できなくなることによるものである。
【0080】
一般化すると、トルクの検出可能範囲Δθは、第1周期数P1及び第2周期数P2を用いて、次の式(7)のように表される。
【0081】
【数4】
【0082】
第1のシャフト4が電気角1周期分回転した場合、電気角差信号Dは、360×(1−P2/P1)degだけ変化する。第1のシャフト4が正方向に回転した場合と負方向に回転した場合を考慮する必要があるため、周期数を検出するためには、許容される電気角差信号Dの変化は、その半分の180×(1−P2/P1)degとなる。第2のシャフト5が第1のシャフト4に対して機械角Δθdegだけ回転した(トーションバー6がΔθdegねじれた)場合、第2のシャフト5の電気角φ2は(電気角差信号Dも同様)、P2×Δθdegだけ変化する。電気角差信号Dの変化が許容電気角差以内であれば周期数が正しく検出される。つまり、P2×Δθの絶対値が180×(1−P2/P1)の絶対値より小さければ、周期数が正しく検出される。したがって、式(7)のようにトルクの検出可能範囲Δθが求められる。
【0083】
なお、回転角センサの分解能はA/Dコンバータで決まることが多いため、機械角1周期に対する電気角の周期数は多い方が好ましいが、周期数を多くすると、式(7)より検出可能なトルク範囲が狭くなってしまう。電源投入時にトルクがかからないならば、電源投入時に電気角差から絶対角を求め、それ以降は電気角の周期数をメモリに記録する方式とすることにより、機械角1周期に対する電気角周期数の条件を無くすことが可能となる。
【0084】
電源投入時にトルクがかかることが懸念される場合で、一般的に車で使用されるトルクセンサのトルク検出範囲である±5degの範囲を検出可能なトルクセンサを作成したい場合には、P1=6、P2=5とすればよい。このようにすることで、|Δθ|<6となり、±5degの範囲を検出可能となる。また、P1とP2の差が1なので、好適にステアリングの機械角とトルクを検出することができるようになる。
【0085】
図11は、本発明の第2の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁石ローター1,2に代えて多極ローター7,8を有する点と、磁気抵抗素子10a,10bの近傍にそれぞれバイアス磁石40a,40bが配置され、かつ磁気抵抗素子11a,11bの近傍にそれぞれバイアス磁石41a,41bが配置される点の2点で、第1の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に詳しく説明する。
【0086】
第1のシャフト4には、第1のシャフト4と同軸で一体となって回転するリング形状の多極ローター7が取り付けられている。多極ローター7は、回転軸Aに垂直な平面に回転軸Aを中心に円を描いた時の円周方向に、第1周期数P1と同数(図11では5個)の凸部を有する。各凸部は一定間隔で配置され、かつ互いに同一な形状を有している。
【0087】
第2のシャフト5には、第2のシャフト5と同軸で一体となって回転するリング形状の多極ローター8が取り付けられている。多極ローター8は、回転軸Aに垂直な平面に回転軸Aを中心に円を描いた時の円周方向に、第2周期数P2と同数(図11では6個)の凸部を有する。各凸部は一定間隔で配置され、かつ互いに同一な形状を有している。
【0088】
多極ローター7,8は、強磁性体によって構成される。具体的には、鉄・コバルト・ニッケルなどを好適に用いることができる。
【0089】
磁気抵抗素子10aは、多極ローター7と同一平面上で多極ローター7と対向する位置に配置され、磁気抵抗素子10bは、多極ローター7と同一平面上で多極ローター7と対向し、多極ローター7の回転中心を中心として、磁気抵抗素子10aとなす角が18degとなるように配置される。
【0090】
バイアス磁石40aは、磁気抵抗素子10aを回転軸方向に平行移動した位置で、できる限り磁気抵抗素子10aに近づけて配置される。同様に、バイアス磁石40bは、磁気抵抗素子10bを回転軸方向に平行移動した位置で、できる限り磁気抵抗素子10bに近づけて配置される。
【0091】
磁気抵抗素子11aは、多極ローター8と同一平面上で多極ローター8と対向する位置に配置され、磁気抵抗素子11bは、多極ローター8と同一平面上で多極ローター8と対向し、多極ローター8の回転中心を中心として、磁気抵抗素子11aとなす角が15degとなるように配置される。
【0092】
バイアス磁石41aは、磁気抵抗素子11aを回転軸方向に平行移動させた位置で、できる限り磁気抵抗素子11aに近づけて配置される。同様に、磁石41bは、磁気抵抗素子11bを回転軸方向に平行移動させた位置で、できる限り磁気抵抗素子11bに近づけて配置される。
【0093】
バイアス磁石40a,40b,41a,41bとして使用可能な磁石としては、例えば、フェライト系、アルニコ系、サマリウムコバルト系、ネオジム系、ボンドマグネットなどが挙げられる。
【0094】
本実施の形態では、第1のシャフト4の回転に伴い、多極ローター7と磁石40a,40bの距離が変化するため、磁気抵抗素子10a,10b上の磁力線の方向が変化する。つまり、多極ローター7と磁石40a,40bとは、協働して、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数P1の周期的な第1の磁界を生成する第1の磁界生成手段として機能する。つまり、多極ローター7と磁石40a,40bとは、協働して、磁気抵抗素子10a,10bが配置されている個所における、磁界の回転軸に対する垂直方向成分(ラジアル方向成分)を、第1のシャフト4の回転に伴って周期的に変化させる。磁気抵抗素子10a,10bは、磁力線方向の変化を検出し、電気信号として出力する。
【0095】
同様に、第2のシャフト5の回転に伴い、多極ローター8と磁石41a,41bの距離が変化するため、磁気抵抗素子11a,11b上の磁力線の方向が変化する。つまり、多極ローター8と磁石41a,41bとは、協働して、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数P2の周期的な第2の磁界を生成する第2の磁界生成手段として機能する。磁気抵抗素子11a,11bは、磁力線方向の変化を検出し、電気信号として出力する。
【0096】
多極ローター7は5組の凹凸を有しているため、磁気抵抗素子10a,10bは機械角に対して5倍の電気角を出力する(第1周期数P1=5)。一方、多極ローター8は6組の凹凸を有しているため、磁気抵抗素子11a,11bは機械角に対して6倍の電気角を出力する(第2周期数P2=6)。
【0097】
以上の構成により、磁気抵抗素子10a,10bは、第1のシャフト4の回転に伴って互いに位相が90deg異なった正弦波状の信号を出力し、磁気抵抗素子11a,11bは、第2のシャフト5の回転に伴って互いに位相が90deg異なった正弦波状の信号を出力することになる。
【0098】
なお、各磁気抵抗素子の配置は、上記のように位相が90deg異なった正弦波状の信号を出力できるように決定されればよく、図11に示した配置には何ら限定されない。
【0099】
以上説明したように、本実施の形態によっても、第1の実施の形態と同様の出力信号を得ることができる。したがって、本実施の形態による回転角・トルクセンサ100によっても、回転する磁界を生成するための磁界生成手段を2つだけ用いる回転角・トルクセンサを提供することが実現される。
【0100】
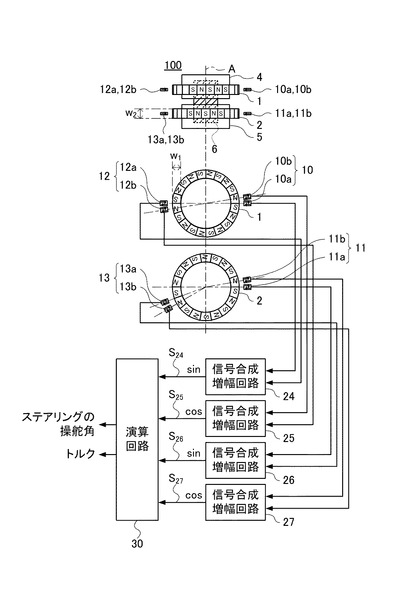
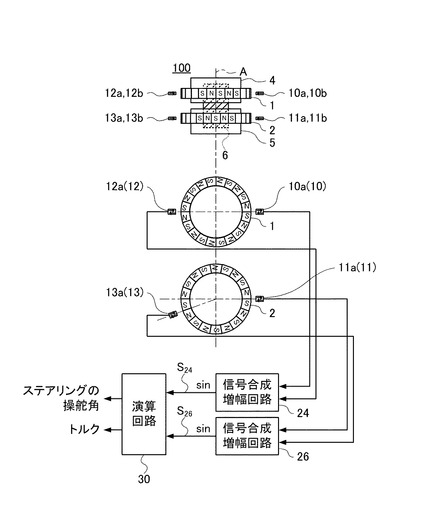
図12は、本発明の第3の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、第1及び第2の磁気センサ10,11に加えて第3及び第4の磁気センサ12,13を備える点、及び増幅回路20〜23に代えて信号合成増幅回路24〜27を備える点で、第1の実施の形態による回転角・トルクセンサ100と相違する。これらの相違により、本実施の形態による回転角・トルクセンサ100は、各シャフトの軸ぶれの影響をキャンセルできるという格別の効果を奏する。以下、詳しく説明する。
【0101】
第3及び第4の磁気センサ12,13は、第1の実施の形態における第1及び第2の磁気センサ10,11と同様、それぞれ2つずつの磁気抵抗素子から構成される。具体的には、第3の磁気センサ12は磁気抵抗素子12a,12b(第5及び第6の磁気抵抗素子)から構成され、第4の磁気センサ13は磁気抵抗素子13a,13b(第7及び第8の磁気抵抗素子)から構成される。磁気抵抗素子12a,12b,13a,13bは、第1の実施の形態で磁気抵抗素子10a等について説明したものと同様の原理により、対応する磁石ローターの回転に応じて、略正弦波信号を出力する。
【0102】
以下では、第1周期数が偶数(例えば10)であり、第2周期数が奇数(例えば9又は11)であるとして説明する。
【0103】
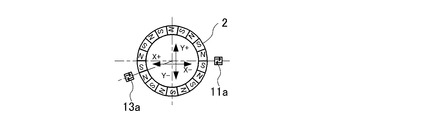
磁気抵抗素子10aと磁気抵抗素子12aは、回転軸Aを通るように磁石ローター1を挟んで180deg対向に配置される。同様に、磁気抵抗素子10bと磁気抵抗素子12bも、回転軸Aを通るように磁石ローター1を挟んで180deg対向に配置される。以上の配置により、磁気抵抗素子10a,12aの各出力信号は互いに同位相となり、磁気抵抗素子10b,12bの各出力信号も互いに同位相となる。また、磁気抵抗素子12a,12bは、磁気抵抗素子10a,10bと同様、電気角で90degの位相差を持って配置される。
【0104】
磁気抵抗素子11aと磁気抵抗素子13aは、回転軸Aの中心軸を通るように磁石ローター2を挟んで対向に配置するが、磁気抵抗素子13aは、磁気抵抗素子11aに対して、180deg+磁極1極分(1/2周期分)ずらした位置に配置される。同様に、磁気抵抗素子11bと磁気抵抗素子13bも、回転軸Aの中心軸を通るように磁石ローター2を挟んで対向に配置するが、磁気抵抗素子13bは、磁気抵抗素子11bに対して、180deg+磁極1極分(1/2周期分)ずらした位置に配置される。以上の配置により、磁気抵抗素子11a,13aの各出力信号は互いに同位相となり、磁気抵抗素子11b,13bの各出力信号も互いに同位相となる。磁気抵抗素子13a,13bは、磁気抵抗素子11a,11bと同様、電気角で90degの位相差を持って配置される。
【0105】
ここで、磁気抵抗素子13aを磁気抵抗素子11aに対して180deg+磁極1極分(1/2周期分)ずらした位置に配置した理由について、簡単に説明する。もし仮に、180degずらした位置に磁気抵抗素子13aを配置したとすると、第2周期数が奇数であることから、磁気抵抗素子11aと磁気抵抗素子13aとは、常時互いに異なる極性の磁極面と対向することになる。したがって、磁気抵抗素子11a,13aの各出力信号が互いに逆位相となり、後段の信号合成増幅回路26で合成する際、互いに打ち消しあってしまう。そこで、磁気抵抗素子11a,13aの各出力信号が互いに同位相となるよう、磁気抵抗素子11aから180deg+磁極1極分(1/2周期分)ずらした位置に、磁気抵抗素子13aを配置している。磁気抵抗素子11b,13bについても同様である。
【0106】
なお、磁石ローター1,2と各磁気抵抗素子とのスラスト方向(軸心方向)の位置関係は、磁石ローター1,2の回転による軸ぶれ等によるズレを含めて、各磁気抵抗素子を飽和領域で動作させるために、磁石ローター1,2が各磁気抵抗素子から外れない位置関係とするのが望ましい。例えば、磁石ローター1,2と、磁気抵抗素子のギャップを4.0mmとし、取り付け誤差±0.5mm、軸ぶれ±0.3mmとすると、磁石ローター1,2の回転面内の厚み(図12に示した幅w1)は2.0mm以上が、又、スラスト方向の厚み(図12に示した幅w2)は3.0mm以上が望ましい。
【0107】
磁気抵抗素子10a及び12aからの出力信号は信号合成増幅回路24に、磁気抵抗素子10b及び12bからの出力信号は信号合成増幅回路25に、磁気抵抗素子11a及び13aからの出力信号は信号合成増幅回路26に、磁気抵抗素子11b及び13bからの出力信号は信号合成増幅回路27に入力される。
【0108】
信号合成増幅回路24,25はそれぞれ、入力された2つの出力信号に第1の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第1の演算は、2つの出力信号を加算する演算である。信号合成増幅回路24,25は、こうして出力する信号の中点電位を電源電圧の中点にシフトさせるオフセット調整も行う。
【0109】
信号合成増幅回路26,27はそれぞれ、入力された2つの出力信号に第2の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第2の演算も、2つの出力信号を加算する演算である。信号合成増幅回路26,27も、こうして出力する信号の中点電位を電源電圧の中点にシフトさせるオフセット調整も行う。
【0110】
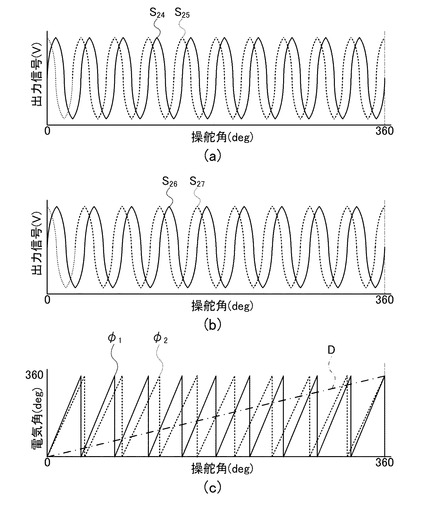
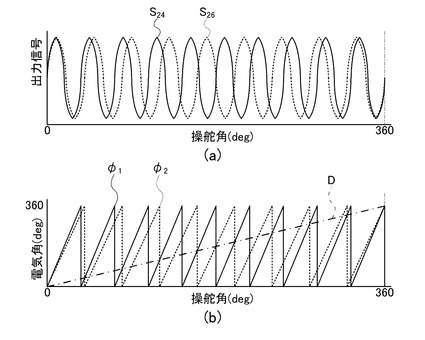
図13(a)は、信号合成増幅回路24,25の出力信号S24,S25を示す図である。また、図13(b)は、信号合成増幅回路26,27の出力信号S26,S27を示す図である。これらは、ステアリングが1回転した場合(操舵角が0deg〜360degまで変化した場合)の出力信号を示したものである。
【0111】
図13(a)と図13(b)とでは、図から明らかなように、出力信号の波長が異なっている。これは、磁石ローター1と磁石ローター2とで、磁極数(周期数)が異なるからである。ここでは、磁石ローター1の周期数を10、磁石ローター2の周期数を9としている。
【0112】
出力信号S24,S26は、正弦波の形状を有するsin信号であり、出力信号S25,S27は、正弦波の形状を有するcos信号である。
【0113】
出力信号S24〜S27は、演算回路30に入力される。演算回路30は、これら出力信号S24〜S27を取り込んだ後、まずA/D変換を行い、デジタルデータに変換する。その後、出力信号S24と出力信号S25とでtan演算を行い、第1のシャフト4の電気角φ1を求める。同様に、出力信号S26と出力信号S27とでtan演算を行い、第2のシャフト5の電気角φ2を求める。具体的な演算方法は第1の実施の形態で説明したとおりであるので、詳しい説明は省略する。
【0114】
図13(c)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角φ1,φ2及び電気角差信号Dをプロットした図である。演算回路30は、電気角φ1,φ2を求めた後、これらの差を示す電気角差信号Dを生成する。電気角差信号Dは、図13(c)に示すように、ステアリングの操舵角と一対一に対応する。演算回路30は、さらに機械角θ1,θ2の算出を経て、ステアリングの操舵角とトルクを求める。この具体的な演算方法も第1の実施の形態で説明したとおりであるので、詳しい説明は省略する。
【0115】
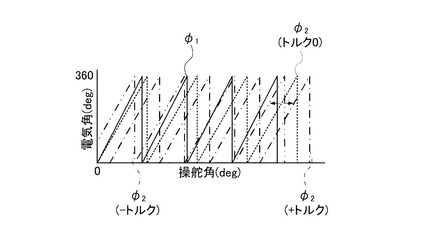
図14は、トルクが+,0,−である場合における、第1及び第2のシャフト4,5の電気角φ1,φ2を示す図である。この図に示すようなトルクが発生した場合にも、第1の実施の形態で説明した演算方法を用いることにより、好適にステアリングの操舵角とトルクを求めることが可能となる。
【0116】
ここから、磁石ローター1,2のいずれか少なくとも一方に、回転軸に対する位置ずれ(軸ぶれ)が生じた場合の、各磁気抵抗素子の出力信号への影響、並びに影響をキャンセルするための具体的な構成及び演算方法について、詳しく説明する。
【0117】
図15は、磁石ローター1の軸ぶれについて説明するための説明図である。ここでは、簡単のため、磁気抵抗素子については、磁気抵抗素子10a,12aのみを示している。
【0118】
図15(a)は軸ぶれなしの状態であり、磁石ローター1が回転しても、磁石ローター1と磁気抵抗素子10a,12aとの位置関係が一定である。この状態で磁石ローター1が回転すれば問題ないが、実際には、図15(b)〜(e)に示すように、磁石ローター1が軸ぶれを起こす場合がある。軸ぶれが起きると、磁石ローター1と磁気抵抗素子10aのX方向・Y方向の位置関係が変化することとなる。
【0119】
図15(b)は、磁石ローター1がX−方向及びY+方向に軸ぶれを起こし、磁気抵抗素子10aに近づいている状態を、図15(c)は、磁石ローター1がX+方向及びY+方向に軸ずれを起こし、磁気抵抗素子12aに近づいている状態を、図15(d)は、磁石ローター1がX+方向及びY−方向に軸ずれを起こし、磁気抵抗素子12aに近づいている状態を、図15(e)は、磁石ローター1がX−方向及びY−方向に軸ずれを起こし、磁気抵抗素子10aに近づいている状態をそれぞれ示している。
【0120】
仮に、磁石ローター1がCW(時計回り)方向に回転するとすると、磁気抵抗素子10aの出力信号の位相に関し、図15(b),図15(c)の状態では位相が遅れる方向にずれ、図15(d),図15(e)の状態では位相が進む方向にずれることとなる。
【0121】
図16(a)は、図15の各状態での磁気抵抗素子10aからの出力信号を示す図である。同図の各グラフについて示す( )内の英字は、図15の枝番に対応している。図16(a)からも、図15(b),図15(c)の状態では位相が遅れる方向にずれ、図15(d),図15(e)の状態では位相が進む方向にずれることが理解される。
【0122】
このような位相のずれか生ずるのは、軸ぶれにより、磁気抵抗素子10aのピン磁性層の方向にある磁石ローター1から発生する磁束ベクトル(磁束密度)が、変わるためである。
【0123】
軸ぶれ量が常に一定であれば、処理回路で電気的に軸ブレの影響をキャンセルすることも可能であるが、軸ぶれ量が、回転速度・回転方向・周囲環境などによりランダムに変化する場合には、そのような方法でのキャンセルは難しい。そこで、本実施の形態では、磁気抵抗素子12aの出力信号を利用して、軸ブレの影響をキャンセルする。以下、詳しく説明する。
【0124】
図16(b)は、図15の各状態での磁気抵抗素子12aからの出力信号を示す図である。同図の各グラフについて示す( )内の英字は、図15の枝番に対応している。図16(b)と図16(a)を比較すると理解されるように、磁気抵抗素子10aからの出力信号が遅れ位相だと、磁気抵抗素子12aからは進み位相の出力信号が得られ、磁気抵抗素子10aからの出力信号が進み位相だと、磁気抵抗素子12aからは遅れ位相の出力信号が得られる。したがって、磁気抵抗素子10aの出力信号と磁気抵抗素子12aの出力信号とを合成(加算)することにより、軸ぶれが生じたとしても、その影響を打ち消して、軸ぶれによる位相ずれのない信号をつくりだすことができることになる。
【0125】
本実施の形態による回転角・トルクセンサ100では、このような信号合成を信号合成増幅回路24〜27において行っている。したがって、各シャフトの軸ぶれの影響をキャンセルすることが実現されている。
【0126】
図17(a)は、軸ぶれによる影響を受けた磁気抵抗素子10aからの出力信号の実測値を示す図である。同図には、図15(a)(c)(e)の各状態での出力信号を示している。なお、実測にあたり、磁石ローター1のぶれの大きさは、X方向,Y方向それぞれについて100μmとした。図17(a)によれば、位相ずれによる出力信号レベルの変動は約±20mVあり、換算すると、約±6degという非常に大きい角度誤差となる。
【0127】
図17(b)は、信号合成増幅回路で合成された信号S24の実測値を示す図である。測定条件は図17(a)と同一である。図17(b)から明らかなように、合成された信号S24では、軸ぶれの影響がキャンセルされ、位相のずれがほとんど発生しなくなっている。すなわち、各シャフトの軸ぶれの影響をキャンセルすることが実現されている。
【0128】
ここで、磁石ローターの周期数が奇数となる場合の磁気抵抗素子の配置について、再度説明する。図18は、周期数が奇数(具体的には9)である磁石ローター2の平面図である。同図に示すように、周期数が奇数である磁石ローター2を用いる場合に軸ぶれの影響をキャンセルするためには、2つの磁気抵抗素子を、180degではなく、180deg+S極(又は、N極)1極分、互いにずらした位置に配置し、これらからの出力信号を合成する。こうすることで、磁石ローターの周期数が奇数であっても、磁気抵抗素子の出力信号が互いに打ち消しあってしまうことがなくなり、軸ぶれによる角度誤差の発生を抑えることが可能になる。
【0129】
以上説明したように、本実施形態による回転角・トルクセンサ100によれば、磁石ローター1により生成される磁界を検出する磁気センサを2組(第1及び第3の磁気センサ10,12)用意するとともに、磁石ローター2により生成される磁界を検出する磁気センサを2組(第2及び第4の磁気センサ11,13)用意し、第1及び第3の磁気センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁気センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角及びトルクを算出するようにしたので、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。
【0130】
図19は、本発明の第4の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁気抵抗素子10b,11b,12b,13bを有しない点、及びこれらに対応する信号合成増幅回路25,27を有しない点で、第3の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に、詳しく説明する。
【0131】
図20(a)は、信号合成増幅回路24,26の出力信号S24,S26を示す図である。これは、ステアリングの回転に伴い、磁石ローター1及び2が1回転した場合の出力信号S24,S26のグラフを示したものである。出力信号S24,S26の波長が異なっているのは、第3の実施の形態で説明したように、磁石ローター1と磁石ローター2とで、磁極数が異なるからである。ここでは、磁石ローター1は20極(N+S)とし、磁石ローター2は18極(N+S)としている。
【0132】
出力信号S24,S26は、演算回路30に入力される。演算回路30は、これら出力信号S24,S26を取り込んだ後、まずA/D変換を行い、デジタルデータに変換する。その後、第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2とを算出するのであるが、ここではtan演算は使えないので、正弦波から直接各電気角を算出する。
【0133】
図20(b)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角φ1,φ2及び電気角差信号Dをプロットした図である。この図は、前掲の図13(c)と同様であるので、以降の処理は第3の実施の形態と同様に実施することができ、ステアリングの操舵角とトルクとを算出できる。
【0134】
本実施形態による回転角・トルクセンサ100によっても、第3の実施の形態と同様、磁石ローター1により生成される磁界を検出する磁気センサを2組(第1及び第3の磁気センサ10,12)用意するとともに、磁石ローター2により生成される磁界を検出する磁気センサを2組(第2及び第4の磁気センサ11,13)用意し、第1及び第3の磁気センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁気センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角及びトルクを算出するようにしたので、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。
【0135】
図21は、本発明の第5の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、周期数が奇数となる磁石ローター2の近傍に配置される第4の磁気センサ13の配置、及び信号合成増幅回路26,27に代えて信号差動増幅回路28,29を有する点で、第3の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に、詳しく説明する。
【0136】
本実施の形態では、第4の磁気センサ13を構成する磁気抵抗素子13a,13bはそれぞれ、対応する磁気抵抗素子11a,11bと180deg互いにずらした位置に配置される。したがって、磁気抵抗素子13a,13bの出力信号の位相は、磁気抵抗素子11a,11bの出力と逆位相になる。
【0137】
磁気抵抗素子11a,13aの出力信号は信号差動増幅回路28に入力され、磁気抵抗素子11b,13bの出力信号は信号差動増幅回路29に入力される。信号差動増幅回路28,29はそれぞれ、入力された2つの出力信号に第2の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第2の演算は、2つの出力信号の差分を算出する差動演算である。
【0138】
仮に、第3の実施の形態と同様に第2の演算が加算演算であったとすると、入力される2つの出力信号が互いに逆位相であることから、これらは互いに打ち消しあい、演算結果としての信号差動増幅回路28,29の出力信号S28,S29の振幅は、ゼロか又は著しく小さな値となる。しかしながら、本実施の形態では第2の演算を差動演算としているので、出力信号S28,S29は有意な振幅を有する信号となる。こうして得られる出力信号S28,S29は演算回路30に入力され、演算回路30は、出力信号S24,S25,S28,S29に基づき、第3の実施の形態で説明したものと同様の処理により、ステアリングの操舵角及びトルクを算出する。
【0139】
本実施形態による回転角・トルクセンサ100によれば、磁気抵抗素子13a,13bをそれぞれ、対応する磁気抵抗素子11a,11bと180deg互いにずらした位置に配置しているにもかかわらず、第3の実施の形態と同様、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。加えて、磁気抵抗素子13a,13bの出力信号と磁気抵抗素子11a,11bの出力信号の間の対称性が第3の実施の形態に比べて良好となることから、より好適に、軸ぶれの影響をキャンセルできるようになる。
【0140】
図22は、本発明の第6の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁石ローター1,2に代えて多極ローター7,8を有する点と、磁気抵抗素子10a,10b,11a,11b,12a,12b,13a,13bの近傍にそれぞれバイアス磁石40a,40b,41a,41b,42a,42b,43a,43bが配置される点の2点で、第3の実施の形態による回転角・トルクセンサ100と相違する。
【0141】
多極ローター7,8及び各バイアス磁石の構成及び材料は、第2の実施の形態で説明したものと同様であるので、詳しい説明は割愛する。
【0142】
磁気抵抗素子12a,12bはそれぞれ、磁気抵抗素子10a,10bと、回転軸Aの中心軸を通るように多極ローター7を挟んで180deg対向に配置する。磁気抵抗素子10aと磁気抵抗素子10bとは、電気角で90degの位相差を持って配置されており、磁気抵抗素子12aと磁気抵抗素子12bとは、電気角で90degの位相差を持って配置されている。磁気抵抗素子13a,13bはそれぞれ、磁気抵抗素子11a,11bと、回転軸Aの中心軸を通るように多極ローター8を挟んで対向に配置するが、磁気抵抗素子13aは、磁気抵抗素子11aに対して、180+360/(2P2)deg分をずらした位置に配置する。同様に、磁気抵抗素子13bは、磁気抵抗素子11bに対して、180+360/(2P2)deg分をずらした位置に配置する。磁気抵抗素子11aと磁気抵抗素子11bとは、電気角で90degの位相差を持って配置されており、磁気抵抗素子13aと磁気抵抗素子13bとは、電気角で90degの位相差を持って配置されている。
【0143】
本実施の形態による回転角・トルクセンサ100によっても、第2の実施の形態による回転角・トルクセンサ100と同様に、各磁気抵抗素子の出力信号を得ることができる。また、第3の実施の形態による回転角・トルクセンサ100と同様に、軸ぶれの影響をキャンセルすることが実現される。
【0144】
以上、本発明の好ましい実施の形態について説明したが、本発明はこうした実施の形態に何等限定されるものではなく、本発明が、その要旨を逸脱しない範囲において、種々なる態様で実施され得ることは勿論である。
【0145】
例えば、上記実施の形態では、ステアリングの操舵角とトルクの両方を出力する回転角・トルクセンサに本発明を適用した例を取り上げて説明したが、本発明は、トルクのみを出力する回転角・トルクセンサにも適用可能である。
【0146】
最後に、磁気抵抗素子の特性に現れるヒステリシスが本発明による機械角算出の精度に与える影響について、詳しく説明する。
【0147】
磁気抵抗素子と、磁石(磁性体を含む)との組み合わせで回転角度を検出しようとする場合、ヒステリシスが回転角度の精度に及ぼす影響を考慮することが好ましい。通常、モーターなどの回転角度を検出する場合、回転角度が一方向であれば、ヒステリシスはあまり問題にならないが、逆回転をさせる場合には、ヒステリシスが回転角度の精度に与える影響は大きなものとなり、求める精度によっては無視できないものとなるからである。
【0148】
図23(a)は、図2に示した回転角・トルクセンサ100(ただし、磁石ローター1の周期数は5とした。)において、第1のシャフト4をCW(時計回り)方向及びCCW(反時計回り)方向にそれぞれ回転させた場合の、磁気抵抗素子10aからの出力信号(実測値)を示す図である。図23(b)は、図23(a)の一部を拡大した図である。
【0149】
図23より理解されるように、この例では、約2mVのヒステリシスが生じている。これは、磁気抵抗素子自体,磁石自体,磁石の着磁ムラなど複数の影響から生じているものである。
【0150】
2mVのヒステリシスを角度精度に換算すると、角度センサとしては、0.02degの角度誤差に相当する。角度センサとして用いる場合には問題のない精度であるが、トルクセンサとして使用する場合には、無視出来ない誤差精度である。
【0151】
この誤差を補正する手段としては、CW及び、CCW方向でそれぞれキャリブレーションを行い、テーブルを作成すればよい。そして、CW方向に回転している時には、CW方向用のテーブルを参照し、CCW方向に回転している時には、CCW方向用のテーブルを参照し、角度・トルク信号を出力すればよい。このようにCW・CCW用のテーブルを、キャリブレーション時にそれぞれ作成することにより、ヒステリシスの影響を抑えた角度精度の信号を得ることが可能になる。
【産業上の利用可能性】
【0152】
本発明による回転角・トルクセンサは、ステアリングシャフトの操舵角及び操舵トルクの検出等に利用できる。
【符号の説明】
【0153】
1,2 磁石ローター
4,5 シャフト
6 トーションバー
7,8 多極ローター
10〜13 磁気センサ
10a,10b,11a,11b,12a,12b,13a,13b 磁気抵抗素子
20〜23 増幅回路
24〜27 信号合成増幅回路
28,29 信号差動増幅回路
30 演算回路
31,32 電気角算出部
33 電気角差信号生成部
34,35 周期数判定信号生成部
36,37 機械角算出部
38 トルク算出部
39 記憶装置
40a,40b,41a,41b,42a,42b,43a,43b バイアス磁石
100 回転角・トルクセンサ
【技術分野】
【0001】
本発明は回転角・トルクセンサに関し、特に回転角センサとトルクセンサを一体化した回転角・トルクセンサに関する。
【背景技術】
【0002】
近年、自動車などの車両に関して、電動パワーステアリング装置(EPS)及び横滑り防止装置(ESC)の両方を装備するケースが増加している。
【0003】
EPSは、運転手の操舵を補助する装置である。EPSでは、ステアリングと車軸をつなぐステアリング軸に、バネの一種であるトーションバーが設けられる。運転手が舵輪を回転させるとステアリング軸を通じて車軸に回転が伝えられるが、トーションバーの作用により、ステアリングと車軸の回転力に一定の差(トルク)が生ずる。EPSは、このトルクを検出し、検出結果に応じた補助操舵力をステアリング軸に与えることにより、運転手の操舵を補助する。
【0004】
ESCは、急ハンドル時や滑りやすい路面を走行中に発生しがちな車両の横滑りを感知し、車両の進行方向を保つように、個々の車輪にブレーキをかける装置である。ESCは、ステアリングの操舵量及び操舵方向(所定の基準ポジションからの回転角。以下、「ステアリングの操舵角」という。)を検出し、検出結果に応じて各車輪のブレーキ制御を行うことで、車両の横滑りを防止する。
【0005】
EPSとESCの両方を搭載する車両には、トルクを検出するセンサ(トルクセンサ)と、ステアリングの操舵角を検出するセンサ(回転角センサ)という2つのセンサが必要となる。近年では、センサの占有スペースの縮小やセンサ自体の機能向上の観点からこれらのセンサの改良が進められており、そのうちのひとつとして、特許文献1,2に示されるような複合型のセンサ(以下、「回転角・トルクセンサ」という。)が検討されている。以下、特許文献1,2それぞれについて、トルクとステアリングの操舵角とを検出する方法を説明する。
【0006】
特許文献1に開示される技術では、それぞれトーションバーの両端に設置される第1及び第3の回転体と、第1の回転体に設けられた歯車に嵌合する歯車を有し、第1の回転体より低速に回転する第2の回転体とが用いられる。第1の回転体の外周面には、例えば15個のN極と15個のS極とが、等間隔をなして交互に配置されている。第3の回転体の外周面にも同様に、第1の回転体と同数のN極及びS極が、等間隔をなして交互に配置されている。これにより、第1及び第3の回転体の外周面近傍には、回動方向に沿って周期的な磁界が形成される。この磁界の周期数(1回転分の周期の数)は、第1及び第3の回転体の外周面にそれぞれ形成されるN極(S極)の数に等しくなる。第2の回転体については、その中心部に磁石が配置されている。
【0007】
第1〜第3の回転体それぞれの近傍には、第1〜第3の磁気センサが配置される。第1の回転体が回動すると、第1の磁気センサには磁界の変動が検出される。第1の磁気センサは、検出した磁界の変動に応じて変動する信号を生成し、出力する。こうして得られる信号を演算すると、第1の回転体の外周面近傍に形成される磁界の周期数と同一周期数の周期的な角度信号(以下、「電気角」という。)が得られる。第3及び第2の回転体についても、それぞれ第1の回転体と同様、第3及び第2の磁気センサの出力から電気角を得ることができる。第3の回転体の電気角は、第3の回転体の外周面近傍に形成される磁界の周期数と同一周期数の周期的な角度信号である。一方、第2の回転体の電気角は、特許文献1の記載によれば、第2の回転体の機械角(所定の基準ポジションからの物理的な回転角)720degの変化に対して180degの割合で変化する角度信号となる。
【0008】
トルクは、第1の回転体の電気角と第3の回転体の電気角の差にトーションバーの弾性定数を乗ずることで算出される。一方、ステアリングの操舵角は、第2の回転体の電気角及び第1の回転体の電気角から求められる。
【0009】
特許文献2に開示される技術では、トーションバーの一端にターゲット3a,3bが設けられ、他端にターゲット3cが設けられる。ターゲット3a,3cそれぞれの外周面には磁性体製の凸起が同数ずつ設けられ、ターゲット3bの外周面には、ターゲット3a,3cに設けられる凸起の個数と互いに素な個数の磁性体製の凸起が設けられる。トルクは、ターゲット3aの電気角とターゲット3cの電気角との差に基づいて算出される。ステアリングの操舵角は、ターゲット3aの電気角とターゲット3bの電気角とに基づいて求められる。
【0010】
ところで、トーションバーの両端に設置された2つの回転体には、回転軸に対する位置ずれ(以下、「軸ぶれ」という。)が生ずる場合がある。このような軸ぶれが発生すると、各回転体の電気角と機械角の関係が崩れることから、上記特許文献1,2に開示される構成では、トルクやステアリングの操舵角を正しく算出することができなくなってしまう。
【0011】
特許文献3には、電動モータ付き自転車のペダル踏力の検出装置(トルクセンサ)の例ではあるが、上記のような軸ぶれの影響をキャンセルできる技術が開示されている。この技術では、第1及び第2の磁性リング(回転体)それぞれについて、その外周付近の互いに180度異なる位置に2つの磁気センサを対向配置する。そして、これら2つの磁気センサの出力を用いて、軸ぶれの影響をキャンセルしている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2006−220529号公報
【特許文献2】特開2003−270062号公報
【特許文献3】特開平11−258079号公報
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、特許文献3に開示される検出装置はトルクセンサとしての機能のみを有する単機能センサである。第1の磁性リング(又は第2の磁性リング)の電気角を求めることはできるが、機械角を求めることができない。したがって、この検出装置を回転角センサとして用いることはできない。
【0014】
したがって、本発明の目的の一つは、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを提供することにある。
【課題を解決するための手段】
【0015】
上記目的を達成するための本発明による回転角・トルクセンサは、回転軸の周りを回動可能に構成された第1のシャフトと、前記回転軸の周りを回動可能に構成された第2のシャフトと、前記回転軸に沿って配置され、前記第1のシャフトと前記第2のシャフトとを接続するトーションバーと、それぞれ前記回転軸に対して固定された第1乃至第4の磁気センサと、前記第1のシャフトの回転に応じて、前記第1及び第3の磁気センサの位置に第1周期数の周期的な第1の磁界を生成する第1の磁界生成手段と、前記第2のシャフトの回転に応じて、前記第2及び第4の磁気センサの位置に第2周期数の周期的な第2の磁界を生成する第2の磁界生成手段と、前記第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、前記第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて前記第1及び第2のシャフトそれぞれの機械角を算出するとともに、算出した前記第1及び第2のシャフトそれぞれの前記機械角に基づいて前記第1のシャフトにかかるトルクを算出する演算手段とを備え、前記第1周期数と前記第2周期数とは互いに異なることを特徴とする回転角・トルクセンサ。
【0016】
本発明によれば、第1及び第2のシャフトそれぞれの機械角を算出する際には、第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて算出を行うこととしたとともに、第1周期数と第2周期数とが互いに異なることとしたので、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を実現できる。
【0017】
上記回転角・トルクセンサにおいて、前記第1周期数が偶数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、前記第1周期数が奇数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置からさらに前記第1の磁界の半周期分ずれた位置に配置され、前記第2周期数が偶数である場合、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、前記第2周期数が奇数である場合、前記第4の磁界センサは、前記第3の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置からさらに前記第2の磁界の半周期分ずれた位置に配置され、前記第1及び第2の演算はともに加算演算であることとしてもよい。
【0018】
また、上記回転角・トルクセンサにおいて、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、前記第1周期数が偶数である場合、前記第1の演算は加算演算であり、前記第1周期数が奇数である場合、前記第1の演算は差動演算であり、前記第2周期数が偶数である場合、前記第2の演算は加算演算であり、前記第2周期数が奇数である場合、前記第2の演算は差動演算であることとしてもよい。
【0019】
また、上記各回転角・トルクセンサにおいて、前記演算手段は、前記第1及び第3の磁界センサの出力に前記第1の演算を施すことにより得られる前記演算出力に基づいて前記第1のシャフトの電気角を算出し、前記第2及び第4の磁界センサの出力に前記第2の演算を施すことにより得られる前記演算出力に基づいて前記第2のシャフトの電気角を算出し、前記第1のシャフトの電気角と前記第2のシャフトの電気角との差分を示す電気角差信号を生成し、前記電気角差信号と前記第1のシャフトの前記電気角と前記第1周期数とに基づいて前記第1のシャフトの機械角を算出し、前記電気角差信号と前記第2のシャフトの前記電気角と前記第2周期数とに基づいて前記第2のシャフトの機械角を算出することとしてもよい。
【0020】
また、上記回転角・トルクセンサにおいて、前記第1の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第1及び第2の磁気抵抗素子を有し、前記第1及び第2の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記第2の磁界センサは、前記第2のシャフトの回動方向に沿って並置された第3及び第4の磁気抵抗素子を有し、前記第3及び第4の磁気抵抗素子は、前記第2の磁界の1/4周期分互いに離隔した位置に設置され、前記第3の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第5及び第6の磁気抵抗素子を有し、前記第5及び第6の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記第4の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第7及び第8の磁気抵抗素子を有し、前記第7及び第8の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、前記演算手段は、前記第1及び第3の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力と、前記第5及び第6の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力とに基づいて前記第1のシャフトの前記電気角を算出するとともに、前記第2及び第4の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力と、前記第7及び第8の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力とに基づいて前記第2のシャフトの前記電気角を算出することとしてもよい。
【発明の効果】
【0021】
本発明によれば、軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを実現できる。
【図面の簡単な説明】
【0022】
【図1】本発明の第1の実施の形態による回転角・トルクセンサの断面構造を示す図である。
【図2】本発明の第1の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図3】GMR素子を通過する磁束密度と、GMR素子の出力信号との関係を示す図である。
【図4】本発明の第1の実施の形態による演算回路内部の機能ブロックを示す図である。
【図5】(a)は、本発明の第1の実施の形態による出力信号の具体的な例を示す図である。(b)は、本発明の第1の実施の形態による電気角算出部の演算途中で得られる信号の波形を示す図である。
【図6】本発明の第1の実施の形態による電気角算出部の演算途中で得られる信号の波形を示す図である。
【図7】本発明の第1の実施の形態の変形例による回転角・トルクセンサの概略構成を示す説明図である。
【図8】横軸をステアリングの機械角とし、縦軸を電気角として、本発明の第1の実施の形態による電気角及び電気角差信号をプロットした図である。
【図9】(a)(b)は、メモリーに記録した演算値と操舵角の関係を利用して機械角を求める変形例の説明図である。
【図10】(a)(b)はそれぞれ、トルクが+1deg,−1degである場合における、第1及び第2のシャフトの各電気角、電気角差信号、及び小数点を切り捨てた第1の周期数判定信号を表す図である。
【図11】本発明の第2の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図12】本発明の第3の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図13】(a)(b)は、本発明の第3の実施の形態による信号合成増幅回路の出力信号を示す図である。(c)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角及び電気角差信号をプロットした図である。
【図14】トルクが+,0,−である場合における、第1及び第2のシャフトの電気角、及び電気角差信号を示す図である。
【図15】磁石ローターの軸ぶれについて説明するための説明図である。
【図16】(a)(b)はそれぞれ、図15の各状態での磁気抵抗素子からの出力信号を示す図である。
【図17】(a)は、軸ぶれによる影響を受けた磁気抵抗素子からの出力信号の実測値を示す図である。(b)は、信号合成増幅回路で合成された信号の実測値を示す図である。
【図18】周期数が奇数である磁石ローターの平面図である。
【図19】本発明の第4の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図20】(a)は、本発明の第4の実施の形態による信号合成増幅回路の出力信号を示す図である。(b)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角及び電気角差信号をプロットした図である。
【図21】本発明の第5の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図22】本発明の第6の実施の形態による回転角・トルクセンサの概略構成を示す説明図である。
【図23】(a)は、図2に示した回転角・トルクセンサ(ただし、磁石ローターの周期数は5とした。)において、第1のシャフトをCW(時計回り)方向及びCCW(反時計回り)方向にそれぞれ回転させた場合の、磁気抵抗素子からの出力信号(実測値)を示す図である。(b)は、(a)の一部を拡大した図である。
【発明を実施するための形態】
【0023】
以下、添付図面を参照しながら、本発明の好ましい実施の形態について詳細に説明する。
【0024】
図1は、本発明の第1の実施の形態による回転角・トルクセンサ100の断面構造を示す図である。同図に示すように、回転角・トルクセンサ100は、それぞれ回転軸Aの周りを回動可能に構成された第1及び第2のシャフト4,5と、第1及び第2のシャフト4,5を接続するトーションバー6と、第1のシャフト4に対して固定された磁石ローター1(第1の磁界生成手段)と、第2のシャフト5に対して固定された磁石ローター2(第2の磁界生成手段)と、磁石ローター1から生ずる磁界(第1の磁界)を検出する第1の磁気センサ10と、磁石ローター2から生ずる磁界(第2の磁界)を検出する第2の磁気センサ11とを備えている。トーションバー6は、図示した領域4aにおいて第1のシャフト4と固着し、領域5aにおいて第2のシャフト5と固着している。また、第1及び第2の磁気センサ10,11は回転軸Aに対して固定されており、第1及び第2のシャフト4,5の回動に伴ってこれらが動くことはない。
【0025】
回転角・トルクセンサ100は自動車のステアリングと車軸の間に設けられる。つまり、図示していないが、第1のシャフト4がステアリングに、第2のシャフト5が車軸に、それぞれ接続されている。運転手がステアリングを回転させると、第1のシャフト4がステアリングとともに回転する。この回転はトーションバー6を介して第2のシャフト5に伝達し、さらに第2のシャフト5から車軸に伝達する。
【0026】
回転角・トルクセンサ100は、電動パワーステアリング装置(EPS)が必要とするトルク(ステアリングと車軸の回転角の差)と、横滑り防止装置(ESC)が必要とするステアリングの操舵角とを検出可能に構成されている。概略を説明すると、回転角・トルクセンサ100は、まず、第1及び第2の磁気センサ10,11の出力に基づいて、第1及び第2のシャフト4,5それぞれの機械角(所定の基準ポジションからの物理的な回転角)を算出する。こうして求められる第1のシャフト4の機械角は、ステアリングの操舵角として出力される。回転角・トルクセンサ100はさらに、算出した第1及び第2のシャフトそれぞれの機械角に基づいて、第1のシャフト4(又は第2のシャフト5)にかかるトルクを算出する。以下、トルクとステアリングの操舵角とを検出するための具体的な構成及び演算方法について、詳しく説明する。
【0027】
図2は、本発明の第1の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。同図は、図1に示した回転角・トルクセンサ100を簡略化して描いた模式図と、磁石ローター1,2の平面図と、回転角・トルクセンサ100の機能ブロック図とを含んでいる。
【0028】
磁石ローター1,2はそれぞれ、図2に示すように、外周面にN極とS極とが交互に現れるように着磁された、リング形状の多極磁石である。磁石ローター1は第1のシャフト4と一体となって回転し、磁石ローター2は第2のシャフト5と一体となって回転する。磁石ローター1,2に使用される磁石としては、例えば、フェライト系、アルニコ系、サマリウムコバルト系、ネオジム系、ボンドマグネットなどが好適である。
【0029】
磁石ローター1は、回転軸に垂直な平面に回転軸を中心に円を描いた時の円周方向に、10対の磁極ペアを有している。これら10対の磁極ペアのサイズ(ピッチ)は互いに同一である。磁石ローター1がこのような構成を有することにより、第1のシャフト4の周囲には、その回動方向に沿って周期数10(第1周期数)の周期的な磁界(第1の磁界)が生成される。言い換えると、磁石ローター1は、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数の周期的な第1の磁界を生成する。ここで、周期数とは、1回転分の周期の数である。磁石ローター1の磁極ペアが10対である場合には、第1のシャフト4が1回転する間に、第1の磁気センサ10では10周期分の磁界変動が観測される。したがって、第1の磁界の周期数は10となる。
【0030】
磁石ローター2は、回転軸に垂直な平面に回転軸を中心に円を描いた時の円周方向に、9対の磁極ペアを有する。これら9対の磁極ペアのサイズ(ピッチ)も互いに同一である。磁石ローター2がこのような構成を有することにより、第2のシャフト5の周囲には、その回動方向に沿って周期数9(第2周期数)の周期的な磁界(第2の磁界)が生成される。言い換えると、磁石ローター2は、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数の周期的な第2の磁界を生成する。
【0031】
なお、ここでは第1周期数と第2周期数がそれぞれ10,9である場合を示しているが、第1周期数及び第2周期数の値はこれに何ら限定されるものではなく、少なくとも互いに異なっていればよい。より好ましくは、第1周期数と前記第2周期数とが互いに素であることが好ましい。また、第1周期数と前記第2周期数との差は1であることが好ましい。
【0032】
第1の磁気センサ10は、図2に示すように、2つの磁気抵抗素子10a,10b(第1及び第2の磁気抵抗素子)から構成される。磁気抵抗素子10a,10bは第1のシャフト4の回動方向に沿って、磁石ローター1と同一平面内に並置されており、その間隔は第1の磁界の1/4周期分となっている。言い換えると、磁気抵抗素子10a,10bは、第1の磁界の1/4周期分互いに離隔した位置に設置される。ここでは第1周期数が10であるので、第1の磁界の1/4周期分は、回転角にして9degに相当する。
【0033】
第2の磁気センサ11も、同様に、2つの磁気抵抗素子11a,11b(第3及び第4の磁気抵抗素子)から構成される。磁気抵抗素子11a,11bは第2のシャフト5の回動方向に沿って並置されており、その間隔は第2の磁界の1/4周期分となっている。言い換えると、磁気抵抗素子11a,11bは、第2の磁界の1/4周期分互いに離隔した位置に設置される。ここでは第2周期数が9であるので、第2の磁界の1/4周期分は、回転角にして10degに相当する。
【0034】
なお、磁気抵抗素子10a〜11bは、互いに区別するために異なる符号を付してあるが、実質的には全て同一の構成を有している。このため、以下の説明において個々の磁気抵抗素子を区別する必要がない場合には、単に磁気抵抗素子と称する。後掲の磁気抵抗素子12aなどについても同様である。
【0035】
磁気抵抗素子10a,10b,11a,11bとして具体的には、GMR素子、MR素子、AMR素子、TMR素子などを用いることが好適である。各磁気抵抗素子は、ハーフブリッジ構成としてもよく、或いはフルブリッジ構成としてもよい。
【0036】
GMR素子について特に説明すると、GMR素子である磁気抵抗素子は、磁化方向が特定の方向に設定されていて、外部磁界の変位に対して磁化状態(例えば、磁化方向や磁化の強さ)が影響を受けないように構成されたピン磁性層と、外部磁界の変化によって磁化状態が変位するフリー磁性層とを備えている。磁石ローター1,2が回転すると、磁石ローター1,2から磁気抵抗素子に影響を与える磁束のベクトルが、回転に応じた周期的な変化を呈する。このベクトルの変化によって磁気抵抗素子内のフリー磁性層の磁化状態が変動し、磁化状態が変動しないピン磁性層の磁化状態と、磁化状態が変動するフリー磁性層との間に磁化状態の変位差が発生する。この磁化状態の変位差は、磁石ローター1,2の回転角度を反映する物理量であり、具体的には、磁気抵抗素子の抵抗値の変化として現れる。磁気抵抗素子にはバイアス電流が供給されており、磁気抵抗素子の抵抗値が変化すると、その両端の電圧が変化する。この電圧変化が、磁気抵抗素子の出力信号となる。
【0037】
図3は、GMR素子を通過する磁束密度と、GMR素子の出力信号との関係を示す図である。本実施の形態による回転角・トルクセンサ100を設計する際には、GMR素子のヒステリシスの発生を少なくするため、GMR素子のフリー磁性層の長手方向とピン固定磁性層の磁化方向(ピン方向)とが直交するように設計するとともに、磁石ローター1,2からの磁束密度、又は後述する多極ローター(図10他)とGMR素子のギャップがGMR素子の出力に対応するように設計することが好ましい。なお、GMR素子が飽和する領域までの磁束密度をGMR素子に与えることで、GMR素子の抵抗値の変化を、磁束密度の変化には影響されない、磁石ローターからの磁束のベクトルの影響のみとすることが可能になる。
【0038】
磁石ローター1が回転すると、磁気抵抗素子10a,10bにおいて、回転に伴う磁束ベクトルの変化に応じた、フリー磁性層の磁化状態の変動が発生する。このため、磁化状態が変動しないピン磁性層の磁化状態との間に磁化状態の変位差が発生し、これが、磁気抵抗素子10a,10bの抵抗値の変化として現れる。上述したように、各磁気抵抗素子にはバイアス電流が供給されており、その抵抗値の変化は、出力信号の変化として検出される。
【0039】
磁気抵抗素子10a,10bからの出力信号は、磁石ローター1の回転に伴う磁束ベクトルの変化に応じて変化し、その波形は概ね正弦波となる。つまり、磁気抵抗素子10a,10bからの出力信号は略正弦波信号である。磁石ローター1が1回転する間に、磁気抵抗素子10a,10bからは、第1周期数分の略正弦波信号が出力される。
【0040】
磁気抵抗素子11a,11bについても同様である。すなわち、磁気抵抗素子11a,11bからの出力信号は略正弦波信号となり、磁石ローター2が1回転する間に、磁気抵抗素子11a,11bからは、第2周期数分の略正弦波信号が出力される。
【0041】
さて、回転角・トルクセンサ100は、図2の機能ブロック図に示すように、4つの増幅回路20〜23と、演算回路30(演算手段)とを備えている。増幅回路20〜23はそれぞれ磁気抵抗素子10a,10b,11a,11bから出力される信号を所定の増幅率で増幅し、演算回路30に出力する回路である。以下では、ステアリングシャフトの回転に伴って増幅回路20〜23から出力される信号を、それぞれ出力信号S20,S21,S22,S23と称する。出力信号S20,S21,S22,S23は、略正弦波状の振幅を有する信号となる。
【0042】
磁気抵抗素子10a,10bが上記のような配置を有することから、出力信号S20と出力信号S21とでは、位相が90deg異なることになる。つまり、出力信号S20が正弦波(sin)であるとすると、出力信号S21は余弦波(cos)となる。同様に、出力信号S22と出力信号S23とでも、位相が90deg異なることになる。つまり、出力信号S22が正弦波(sin)であるとすると、出力信号S23は余弦波(cos)となる。
【0043】
演算回路30は、出力信号S20,S21に基づいて第1のシャフト4の電気角φ1(対応する磁石ローターによって生成される磁界の周期数と同一周期数の周期的な角度信号)を検出するとともに、出力信号S22,S23に基づいて第2のシャフト5の電気角φ2を検出する。そして、これら電気角φ1,φ2に所定の演算を施すことにより、第1のシャフト4の機械角θ1と第2のシャフト5の機械角θ2とを求め、最終的には、ステアリングの操舵角とトルクとを算出する。以下、具体的な演算の方法について、図面を参照しながら詳しく説明する。
【0044】
図4は、演算回路30内部の機能ブロックを示す図である。同図に示すように、演算回路30は、電気角算出部31,32、電気角差信号生成部33、周期数判定信号生成部34,35、機械角算出部36,37、トルク算出部38を有している。
【0045】
電気角算出部31は、出力信号S20,S21に基づいて第1のシャフト4の電気角φ1を算出する機能部である。以下、具体的な出力信号S20,S21の具体的な信号波形を参照しながら、電気角算出部31の処理について詳しく説明する。
【0046】
図5(a)は、出力信号S20,S21の具体的な例を示す図である。図5(b)及び図6は、電気角算出部31の演算途中で得られる信号の波形を示す図である。各図において、横軸の「操舵角」は、ステアリングの操舵角を表している。
【0047】
運転手がステアリングを回転させると、つまり、第1のシャフト4が回転すると、図5(a)に示すように、sinに近似した信号S20が増幅回路20から出力される。また、信号S20と位相が90deg異なる信号S21(cosに近似した信号)が増幅回路21より出力される。
【0048】
電気角算出部31は、信号S20(第1の出力信号)と信号S21(第2の出力信号)とから、第1のシャフトの電気角φ1を求めて出力する。具体的には、次のようにして電気角φ1を算出する。すなわち、まず、信号S20と信号S21とを絶対値で比較し、信号S21の絶対値の方が大きい場合には、第1の出力信号を第2の出力信号で除した結果S20/S21(tanに近似した信号)を、信号S20の絶対値の方が大きい場合には、第2の出力信号を第1の出力信号で除した結果S21/S20(1/tanに近似した信号)を算出する。図5(b)は、この算出の結果得られる演算値を示している。
【0049】
得られた演算値は、図5(b)から明らかなように、電気角φ1と一対一対応していない。したがって、この演算値から電気角φ1を直接求めることはできない。そこで、電気角算出部31は、図5(a)に示す範囲R1〜R4ごとに異なる数値を上記演算値に加算することで、演算値と電気角φ1とが一対一に対応するようにしている。
【0050】
具体的には、信号S20と信号S21が範囲R1にある場合、すなわち信号S20の絶対値が信号S21の絶対値より大きく、かつ信号S20が0より大きい場合には、S21/S20に所定値3(第1の値)を加算してなるS21/S20+3(第1の演算値)を演算結果とする。信号S20と信号S21が範囲R2にある場合、すなわち信号S21の絶対値が信号S20の絶対値より大きく、かつ信号S21が0より小さい場合には、S20/S21に所定値5(第2の値)を加算してなるS20/S21+5(第2の演算値)を演算結果とする。信号S20と信号S21が範囲R3にある場合、すなわち信号S20の絶対値が信号S21の絶対値より大きく、かつ信号S20が0より小さい場合には、S21/S20に所定値7(第3の値)を加算してなるS21/S20+7(第3の演算値)を演算結果とする。その他の場合、すなわち信号S20と信号S21が範囲R4にある場合には、S20/S21に所定値1(第4の値)を加算してなるS20/S21+1(第4の演算値)を演算結果とする。
【0051】
図6は、以上のようにして求められる演算値を示している。同図から明らかなように、この演算値は電気角と一対一対応している。したがって、演算値から電気角φ1を求めることが可能になる。電気角算出部31は、こうして求めた電気角φ1を出力する。
【0052】
電気角算出部32は、信号S22と信号S23とから、第2のシャフトの電気角φ2を求めて出力する。電気角算出部32の処理は、上述した電気角算出部31の処理と同様であるから、詳しい説明は割愛する。
【0053】
なお、図6に示す演算値を求める際、上記説明では、S20/S21又はS21/S20に最低でも1を足しているが、これは、演算値が負数にならないようにするためである。負数になっても構わない場合には、S20/S21又はS21/S20に加算する数値をより小さな値としてもよい。
【0054】
また、ここでは出力信号から一旦tan信号を算出することで電気角φ1,φ2を求めたが、もちろん、sin信号又はcos信号から直接電気角φ1,φ2を求めてもよい。電気角φ1,φ2のうち一方をtan信号から算出し、他方をsin信号又はcos信号から直接算出することとしてもよい。第1のシャフト4の回転に応じて各増幅回路20〜23から出力される信号に対して電気角φ1,φ2が一意に決まるのであれば、どのような演算方法を用いてもよい。
【0055】
また、理想的な正弦波が出力されている場合は、上述した演算で確実に電気角φ1,φ2を求めることが可能となるが、実際の出力信号は、必ずしも理想的な正弦波形とはならない。そこで、演算値と電気角の関係をあらかじめテーブル化してメモリに記録し、メモリと演算値を照合することで、電気角を求めることとしてもよい。
【0056】
テーブル化を採用する変形例について、具体的に説明する。図7は、本変形例による回転角・トルクセンサ100の概略構成を示す図である。同図に示すように、本変形例による回転角・トルクセンサ100は、記憶装置39(記憶手段)を有する点で、図2に示した回転角・トルクセンサ100と異なっている。以下、図2に示した回転角・トルクセンサ100との相違点を中心に詳しく説明する。
【0057】
記憶装置39は、所定範囲の数値データと角度データとを一対一に対応付けたテーブルを記憶する。ここでいう所定範囲とは、図6に示した演算値(上述した第1〜第4の演算値)が取り得る値の最大値と最小値の間の範囲である。なお、記憶装置39は、電気角算出部31,32のそれぞれについて、上記テーブルを記憶することとしてもよい。
【0058】
上述したように、電気角算出部31は、信号S21,S21の値に応じて第1〜第4の演算値のいずれかを算出している。電気角算出部31は、こうして算出した各演算値に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ1の算出結果として出力する。
【0059】
上述した例に即してより具体的に説明すると、電気角算出部31は、信号S20と信号S21が範囲R1にある場合には、第1の演算値S21/S20+3を算出する。そして、この第1の演算値S21/S20+3に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ1の算出結果として出力する。詳しい説明は割愛するが、第2〜第4の演算値についても同様である。
【0060】
電気角算出部32も、電気角算出部31と同様の処理を行う。つまり、信号S22,S23の値に応じて第1〜第4の演算値のいずれかを算出し、算出した各演算値に等しい数値データと対応付けて記憶される角度データを記憶装置39から読み出し、電気角φ2の算出結果として出力する。
【0061】
以上説明したように、演算値と電気角の関係をあらかじめテーブル化しておくことによっても、電気角φ1,φ2を求めることが可能になる。
【0062】
さて、図8は、横軸をステアリングの機械角とし、縦軸を電気角として、電気角φ1,φ2をプロットした図である。同図に示されるように、電気角φ1,φ2はそれぞれ、周期数10,9の周期信号となっている。これらの周期数は、磁石ローター1,2の外周面に設けられた磁極の数によって決まっている。
【0063】
電気角差信号生成部33は、第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2との差分を示す電気角差信号Dを生成して出力する。具体的には、φ1≧φ2である場合にはD=φ1−φ2により電気角差信号Dを生成し、それ以外の場合にはD=360deg+φ1−φ2により電気角差信号Dを生成する。
【0064】
図8には、トルクが0であると仮定した場合の電気角差信号Dも示している。同図に示すように、電気角差信号Dは、ステアリングの操舵角と一対一に対応している。このような一対一対応は、第1周期数と第2周期数を適切に選択することにより実現できる。仮にトルクが0であることが予め分かっているとするならば、電気角差信号Dから直接ステアリングの操舵角を求めることができる。
【0065】
しかし、実際にはトルクが0でない場合を想定しなければならないので、ステアリングの操舵角を求めるために、周期数判定信号生成部34,35以降の機能部において、さらなる演算処理を行う。この演算処理では、トルクも算出される。以下、詳しく説明する。
【0066】
周期数判定信号生成部34は、電気角差信号Dと第1のシャフト4の電気角φ1と第1周期数P1(=10)とに基づいて、第1の磁界の周期を示す第1の周期数判定信号J1を生成する。具体的には、まず、次の式(1)で表される信号J'1を算出し、算出した信号J'1に所定の数値nを加算することにより、第1の周期数判定信号J1を生成する。式で表すと、次の式(2)のようになる。数値n1を加算するのは、後の処理の便宜のためである。すなわち、数値n1を適切に選択することで、第1の周期数判定信号J1の小数点未満を切り捨てるだけで、基準ポジションからの第1のシャフト4の回転周期数を示す値が得られるようになる。ただし、式(2)の計算では、第1の周期数判定信号[J1]は0からP1+1までの値をとる。そのため、計算の結果[J1]=0となる場合は[J1]=P1と置き換え、[J1]=P1+1となる場合は[J1]=1と置き換えることが好ましい。数値n1の具体的な値としては、トルクがかからない状態でφ1=φ2=0となる場合には、1.5とすることが好ましい。トルクが発生する状態では、1.5からずれる値とすることとしてもよい。
【0067】
【数1】
【0068】
数値n1の具体的な値について、より詳しく説明する。例えば、トルクがかからない状態で電気角差信号Dが0となる場合の第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2の値をφEとする、すなわち、φ1=φ2=φEとすると、n1=(360−φE)/360+0.5+mとするとよい。ここで、mは任意の整数であり、計算機を用いた計算では0または1とすると都合がよい場合が多い。これ以外の方法でも、トルクが0の状態でJ1の小数点未満が0.5に近くなるようにn1を設定するのが望ましい。また、同時にJ1の整数部分が周期数または周期数から1を減じた値となるようにn1を設定するのが望ましい。それ以外の値でも周期数を求めることは可能であり、n1はこの値に限るものではない。
【0069】
機械角算出部36は、第1の周期数判定信号J1と第1のシャフト4の電気角φ1と第1周期数P1(=10)とに基づいて、第1のシャフト4の機械角θ1を算出する。具体的には、次の式(3)により、機械角θ1を算出する。[ ]はガウス記号であり、[ ]内の数字の小数点を切り捨てる演算を意味している。こうして求められる第1のシャフト4の機械角θ1は、ステアリングの操舵角に他ならない。
【0070】
【数2】
【0071】
なお、実際には磁石ロータ1,2の精度には限界があるため、電気角周期ごとに機械角と入力信号の関係を予め記録して図示しないメモリーに格納し、上記[J1]の値から周期数を求め、周期数と入力信号より演算される値からメモリーを参照して、機械角θ1を求めてもよい。つまり、磁気抵抗素子10a,10b,11a,11bから得られる波形の電気角周期数に対する繰り返し精度が高ければ上記のような方法でも求めることができるが、繰り返し精度が悪い場合には、メモリーに記録した演算値と操舵角の関係を使用するとよい。具体的には、図6の演算値を、機械角1周に対して記録する。すると、図9(a)のような波形となる。その演算値に周期数×8を加えると、図9(b)の波形となる。図9(b)では、機械角1周分にわたって機械角と演算値とが1対1に対応しているので、演算値から機械角を精度よく求めることが可能となる。
【0072】
図10(a)(b)はそれぞれ、トルクが+1deg,−1degである場合における、第1及び第2のシャフト4,5の各電気角φ1,φ2、電気角差信号D、及び小数点を切り捨てた第1の周期数判定信号[J1]を表す図である。なお、同図に示す第1の周期数判定信号[J1]では、上述した置き換え(式(2)の計算の結果[J1]=0となる場合は[J1]=P1と置き換え、[J1]=P1+1となる場合は[J1]=1と置き換える。)を行っている。
【0073】
図10(a)(b)に示されるように、小数点を切り捨てた第1の周期数判定信号[J1]は、トルクの値によらず、第1のシャフト4の電気角φ1が360degから0degに変化するところで1段上がる階段状関数となっている。このことは、第1の周期数判定信号[J1]が、基準ポジションからの第1のシャフト4の回転周期数を表していことを示している。したがって、第1の周期数判定信号[J1]を用いることで、第1のシャフト4の機械角θ1を算出することが可能になっている。
【0074】
例えば、第1の周期数判定信号[J1]を用いることで、トルクが+1degの場合である図10(a)と−1degの場合である(b)でともに、φ1が操蛇角0〜36度で、周期数が1であると判定が可能となる。図10(a)のφ1が操蛇角8度近傍未満で第1の周期数判定信号[J1]が11となっているが、第1の周期数判定信号[J1]が第1周期数P1(=10)を超えた場合は、第1周期数P1(=10)を減じることとすることにより、0度から36度で第1の周期数判定信号[J1]は同じ値となる。よって、第1の周期数判定信号[J1]を用いることで、第1のシャフト4の機械角θ1を算出することが可能になっている。
【0075】
周期数判定信号生成部35の処理は、周期数判定信号生成部34と同様である。すなわち、周期数判定信号生成部35は、電気角差信号Dと第2のシャフト5の電気角φ2と第2周期数P2(=9)とに基づき、次の式(4)及び式(5)により、第2の磁界の周期を示す第2の周期数判定信号J2を生成する。そして、第2の周期数判定信号J2と第2のシャフト5の電気角φ2と第2周期数P2(=9)とに基づき、次の式(6)により、第2のシャフト5の機械角θ2を算出する。数値n2は、上述した数値n1と同様、トルクが0の状態でJ2の小数点未満が0.5に近くなるように設定することが望ましい。
【0076】
【数3】
【0077】
トルク算出部38は、以上のようにして算出された第1のシャフト4の機械角θ1と第2のシャフト5の機械角θ2とに基づいて、第1のシャフト4にかかるトルクを算出する。具体的には、機械角θ1と機械角θ2の差分θ1−θ2を算出し、トルクとして出力する。
【0078】
以上説明したように、本実施の形態による回転角・トルクセンサ100によれば、回転する磁界を生成するための磁界生成手段を2つだけ用いる回転角・トルクセンサを提供することが実現される。それゆえ、車両の省スペース化にも貢献できる。
【0079】
なお、以上の方法で求められるトルクには、検出可能範囲に制限がある。例えば、第1周期数P1=10、第2周期数P2=9である場合を例にとると、トルクの検出可能範囲は−2deg〜+2degとなる。これは、トルクがこの範囲を超えると周期数判定が正しくできなくなり、回転角・トルクが正しく検出できなくなることによるものである。
【0080】
一般化すると、トルクの検出可能範囲Δθは、第1周期数P1及び第2周期数P2を用いて、次の式(7)のように表される。
【0081】
【数4】
【0082】
第1のシャフト4が電気角1周期分回転した場合、電気角差信号Dは、360×(1−P2/P1)degだけ変化する。第1のシャフト4が正方向に回転した場合と負方向に回転した場合を考慮する必要があるため、周期数を検出するためには、許容される電気角差信号Dの変化は、その半分の180×(1−P2/P1)degとなる。第2のシャフト5が第1のシャフト4に対して機械角Δθdegだけ回転した(トーションバー6がΔθdegねじれた)場合、第2のシャフト5の電気角φ2は(電気角差信号Dも同様)、P2×Δθdegだけ変化する。電気角差信号Dの変化が許容電気角差以内であれば周期数が正しく検出される。つまり、P2×Δθの絶対値が180×(1−P2/P1)の絶対値より小さければ、周期数が正しく検出される。したがって、式(7)のようにトルクの検出可能範囲Δθが求められる。
【0083】
なお、回転角センサの分解能はA/Dコンバータで決まることが多いため、機械角1周期に対する電気角の周期数は多い方が好ましいが、周期数を多くすると、式(7)より検出可能なトルク範囲が狭くなってしまう。電源投入時にトルクがかからないならば、電源投入時に電気角差から絶対角を求め、それ以降は電気角の周期数をメモリに記録する方式とすることにより、機械角1周期に対する電気角周期数の条件を無くすことが可能となる。
【0084】
電源投入時にトルクがかかることが懸念される場合で、一般的に車で使用されるトルクセンサのトルク検出範囲である±5degの範囲を検出可能なトルクセンサを作成したい場合には、P1=6、P2=5とすればよい。このようにすることで、|Δθ|<6となり、±5degの範囲を検出可能となる。また、P1とP2の差が1なので、好適にステアリングの機械角とトルクを検出することができるようになる。
【0085】
図11は、本発明の第2の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁石ローター1,2に代えて多極ローター7,8を有する点と、磁気抵抗素子10a,10bの近傍にそれぞれバイアス磁石40a,40bが配置され、かつ磁気抵抗素子11a,11bの近傍にそれぞれバイアス磁石41a,41bが配置される点の2点で、第1の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に詳しく説明する。
【0086】
第1のシャフト4には、第1のシャフト4と同軸で一体となって回転するリング形状の多極ローター7が取り付けられている。多極ローター7は、回転軸Aに垂直な平面に回転軸Aを中心に円を描いた時の円周方向に、第1周期数P1と同数(図11では5個)の凸部を有する。各凸部は一定間隔で配置され、かつ互いに同一な形状を有している。
【0087】
第2のシャフト5には、第2のシャフト5と同軸で一体となって回転するリング形状の多極ローター8が取り付けられている。多極ローター8は、回転軸Aに垂直な平面に回転軸Aを中心に円を描いた時の円周方向に、第2周期数P2と同数(図11では6個)の凸部を有する。各凸部は一定間隔で配置され、かつ互いに同一な形状を有している。
【0088】
多極ローター7,8は、強磁性体によって構成される。具体的には、鉄・コバルト・ニッケルなどを好適に用いることができる。
【0089】
磁気抵抗素子10aは、多極ローター7と同一平面上で多極ローター7と対向する位置に配置され、磁気抵抗素子10bは、多極ローター7と同一平面上で多極ローター7と対向し、多極ローター7の回転中心を中心として、磁気抵抗素子10aとなす角が18degとなるように配置される。
【0090】
バイアス磁石40aは、磁気抵抗素子10aを回転軸方向に平行移動した位置で、できる限り磁気抵抗素子10aに近づけて配置される。同様に、バイアス磁石40bは、磁気抵抗素子10bを回転軸方向に平行移動した位置で、できる限り磁気抵抗素子10bに近づけて配置される。
【0091】
磁気抵抗素子11aは、多極ローター8と同一平面上で多極ローター8と対向する位置に配置され、磁気抵抗素子11bは、多極ローター8と同一平面上で多極ローター8と対向し、多極ローター8の回転中心を中心として、磁気抵抗素子11aとなす角が15degとなるように配置される。
【0092】
バイアス磁石41aは、磁気抵抗素子11aを回転軸方向に平行移動させた位置で、できる限り磁気抵抗素子11aに近づけて配置される。同様に、磁石41bは、磁気抵抗素子11bを回転軸方向に平行移動させた位置で、できる限り磁気抵抗素子11bに近づけて配置される。
【0093】
バイアス磁石40a,40b,41a,41bとして使用可能な磁石としては、例えば、フェライト系、アルニコ系、サマリウムコバルト系、ネオジム系、ボンドマグネットなどが挙げられる。
【0094】
本実施の形態では、第1のシャフト4の回転に伴い、多極ローター7と磁石40a,40bの距離が変化するため、磁気抵抗素子10a,10b上の磁力線の方向が変化する。つまり、多極ローター7と磁石40a,40bとは、協働して、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数P1の周期的な第1の磁界を生成する第1の磁界生成手段として機能する。つまり、多極ローター7と磁石40a,40bとは、協働して、磁気抵抗素子10a,10bが配置されている個所における、磁界の回転軸に対する垂直方向成分(ラジアル方向成分)を、第1のシャフト4の回転に伴って周期的に変化させる。磁気抵抗素子10a,10bは、磁力線方向の変化を検出し、電気信号として出力する。
【0095】
同様に、第2のシャフト5の回転に伴い、多極ローター8と磁石41a,41bの距離が変化するため、磁気抵抗素子11a,11b上の磁力線の方向が変化する。つまり、多極ローター8と磁石41a,41bとは、協働して、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数P2の周期的な第2の磁界を生成する第2の磁界生成手段として機能する。磁気抵抗素子11a,11bは、磁力線方向の変化を検出し、電気信号として出力する。
【0096】
多極ローター7は5組の凹凸を有しているため、磁気抵抗素子10a,10bは機械角に対して5倍の電気角を出力する(第1周期数P1=5)。一方、多極ローター8は6組の凹凸を有しているため、磁気抵抗素子11a,11bは機械角に対して6倍の電気角を出力する(第2周期数P2=6)。
【0097】
以上の構成により、磁気抵抗素子10a,10bは、第1のシャフト4の回転に伴って互いに位相が90deg異なった正弦波状の信号を出力し、磁気抵抗素子11a,11bは、第2のシャフト5の回転に伴って互いに位相が90deg異なった正弦波状の信号を出力することになる。
【0098】
なお、各磁気抵抗素子の配置は、上記のように位相が90deg異なった正弦波状の信号を出力できるように決定されればよく、図11に示した配置には何ら限定されない。
【0099】
以上説明したように、本実施の形態によっても、第1の実施の形態と同様の出力信号を得ることができる。したがって、本実施の形態による回転角・トルクセンサ100によっても、回転する磁界を生成するための磁界生成手段を2つだけ用いる回転角・トルクセンサを提供することが実現される。
【0100】
図12は、本発明の第3の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、第1及び第2の磁気センサ10,11に加えて第3及び第4の磁気センサ12,13を備える点、及び増幅回路20〜23に代えて信号合成増幅回路24〜27を備える点で、第1の実施の形態による回転角・トルクセンサ100と相違する。これらの相違により、本実施の形態による回転角・トルクセンサ100は、各シャフトの軸ぶれの影響をキャンセルできるという格別の効果を奏する。以下、詳しく説明する。
【0101】
第3及び第4の磁気センサ12,13は、第1の実施の形態における第1及び第2の磁気センサ10,11と同様、それぞれ2つずつの磁気抵抗素子から構成される。具体的には、第3の磁気センサ12は磁気抵抗素子12a,12b(第5及び第6の磁気抵抗素子)から構成され、第4の磁気センサ13は磁気抵抗素子13a,13b(第7及び第8の磁気抵抗素子)から構成される。磁気抵抗素子12a,12b,13a,13bは、第1の実施の形態で磁気抵抗素子10a等について説明したものと同様の原理により、対応する磁石ローターの回転に応じて、略正弦波信号を出力する。
【0102】
以下では、第1周期数が偶数(例えば10)であり、第2周期数が奇数(例えば9又は11)であるとして説明する。
【0103】
磁気抵抗素子10aと磁気抵抗素子12aは、回転軸Aを通るように磁石ローター1を挟んで180deg対向に配置される。同様に、磁気抵抗素子10bと磁気抵抗素子12bも、回転軸Aを通るように磁石ローター1を挟んで180deg対向に配置される。以上の配置により、磁気抵抗素子10a,12aの各出力信号は互いに同位相となり、磁気抵抗素子10b,12bの各出力信号も互いに同位相となる。また、磁気抵抗素子12a,12bは、磁気抵抗素子10a,10bと同様、電気角で90degの位相差を持って配置される。
【0104】
磁気抵抗素子11aと磁気抵抗素子13aは、回転軸Aの中心軸を通るように磁石ローター2を挟んで対向に配置するが、磁気抵抗素子13aは、磁気抵抗素子11aに対して、180deg+磁極1極分(1/2周期分)ずらした位置に配置される。同様に、磁気抵抗素子11bと磁気抵抗素子13bも、回転軸Aの中心軸を通るように磁石ローター2を挟んで対向に配置するが、磁気抵抗素子13bは、磁気抵抗素子11bに対して、180deg+磁極1極分(1/2周期分)ずらした位置に配置される。以上の配置により、磁気抵抗素子11a,13aの各出力信号は互いに同位相となり、磁気抵抗素子11b,13bの各出力信号も互いに同位相となる。磁気抵抗素子13a,13bは、磁気抵抗素子11a,11bと同様、電気角で90degの位相差を持って配置される。
【0105】
ここで、磁気抵抗素子13aを磁気抵抗素子11aに対して180deg+磁極1極分(1/2周期分)ずらした位置に配置した理由について、簡単に説明する。もし仮に、180degずらした位置に磁気抵抗素子13aを配置したとすると、第2周期数が奇数であることから、磁気抵抗素子11aと磁気抵抗素子13aとは、常時互いに異なる極性の磁極面と対向することになる。したがって、磁気抵抗素子11a,13aの各出力信号が互いに逆位相となり、後段の信号合成増幅回路26で合成する際、互いに打ち消しあってしまう。そこで、磁気抵抗素子11a,13aの各出力信号が互いに同位相となるよう、磁気抵抗素子11aから180deg+磁極1極分(1/2周期分)ずらした位置に、磁気抵抗素子13aを配置している。磁気抵抗素子11b,13bについても同様である。
【0106】
なお、磁石ローター1,2と各磁気抵抗素子とのスラスト方向(軸心方向)の位置関係は、磁石ローター1,2の回転による軸ぶれ等によるズレを含めて、各磁気抵抗素子を飽和領域で動作させるために、磁石ローター1,2が各磁気抵抗素子から外れない位置関係とするのが望ましい。例えば、磁石ローター1,2と、磁気抵抗素子のギャップを4.0mmとし、取り付け誤差±0.5mm、軸ぶれ±0.3mmとすると、磁石ローター1,2の回転面内の厚み(図12に示した幅w1)は2.0mm以上が、又、スラスト方向の厚み(図12に示した幅w2)は3.0mm以上が望ましい。
【0107】
磁気抵抗素子10a及び12aからの出力信号は信号合成増幅回路24に、磁気抵抗素子10b及び12bからの出力信号は信号合成増幅回路25に、磁気抵抗素子11a及び13aからの出力信号は信号合成増幅回路26に、磁気抵抗素子11b及び13bからの出力信号は信号合成増幅回路27に入力される。
【0108】
信号合成増幅回路24,25はそれぞれ、入力された2つの出力信号に第1の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第1の演算は、2つの出力信号を加算する演算である。信号合成増幅回路24,25は、こうして出力する信号の中点電位を電源電圧の中点にシフトさせるオフセット調整も行う。
【0109】
信号合成増幅回路26,27はそれぞれ、入力された2つの出力信号に第2の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第2の演算も、2つの出力信号を加算する演算である。信号合成増幅回路26,27も、こうして出力する信号の中点電位を電源電圧の中点にシフトさせるオフセット調整も行う。
【0110】
図13(a)は、信号合成増幅回路24,25の出力信号S24,S25を示す図である。また、図13(b)は、信号合成増幅回路26,27の出力信号S26,S27を示す図である。これらは、ステアリングが1回転した場合(操舵角が0deg〜360degまで変化した場合)の出力信号を示したものである。
【0111】
図13(a)と図13(b)とでは、図から明らかなように、出力信号の波長が異なっている。これは、磁石ローター1と磁石ローター2とで、磁極数(周期数)が異なるからである。ここでは、磁石ローター1の周期数を10、磁石ローター2の周期数を9としている。
【0112】
出力信号S24,S26は、正弦波の形状を有するsin信号であり、出力信号S25,S27は、正弦波の形状を有するcos信号である。
【0113】
出力信号S24〜S27は、演算回路30に入力される。演算回路30は、これら出力信号S24〜S27を取り込んだ後、まずA/D変換を行い、デジタルデータに変換する。その後、出力信号S24と出力信号S25とでtan演算を行い、第1のシャフト4の電気角φ1を求める。同様に、出力信号S26と出力信号S27とでtan演算を行い、第2のシャフト5の電気角φ2を求める。具体的な演算方法は第1の実施の形態で説明したとおりであるので、詳しい説明は省略する。
【0114】
図13(c)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角φ1,φ2及び電気角差信号Dをプロットした図である。演算回路30は、電気角φ1,φ2を求めた後、これらの差を示す電気角差信号Dを生成する。電気角差信号Dは、図13(c)に示すように、ステアリングの操舵角と一対一に対応する。演算回路30は、さらに機械角θ1,θ2の算出を経て、ステアリングの操舵角とトルクを求める。この具体的な演算方法も第1の実施の形態で説明したとおりであるので、詳しい説明は省略する。
【0115】
図14は、トルクが+,0,−である場合における、第1及び第2のシャフト4,5の電気角φ1,φ2を示す図である。この図に示すようなトルクが発生した場合にも、第1の実施の形態で説明した演算方法を用いることにより、好適にステアリングの操舵角とトルクを求めることが可能となる。
【0116】
ここから、磁石ローター1,2のいずれか少なくとも一方に、回転軸に対する位置ずれ(軸ぶれ)が生じた場合の、各磁気抵抗素子の出力信号への影響、並びに影響をキャンセルするための具体的な構成及び演算方法について、詳しく説明する。
【0117】
図15は、磁石ローター1の軸ぶれについて説明するための説明図である。ここでは、簡単のため、磁気抵抗素子については、磁気抵抗素子10a,12aのみを示している。
【0118】
図15(a)は軸ぶれなしの状態であり、磁石ローター1が回転しても、磁石ローター1と磁気抵抗素子10a,12aとの位置関係が一定である。この状態で磁石ローター1が回転すれば問題ないが、実際には、図15(b)〜(e)に示すように、磁石ローター1が軸ぶれを起こす場合がある。軸ぶれが起きると、磁石ローター1と磁気抵抗素子10aのX方向・Y方向の位置関係が変化することとなる。
【0119】
図15(b)は、磁石ローター1がX−方向及びY+方向に軸ぶれを起こし、磁気抵抗素子10aに近づいている状態を、図15(c)は、磁石ローター1がX+方向及びY+方向に軸ずれを起こし、磁気抵抗素子12aに近づいている状態を、図15(d)は、磁石ローター1がX+方向及びY−方向に軸ずれを起こし、磁気抵抗素子12aに近づいている状態を、図15(e)は、磁石ローター1がX−方向及びY−方向に軸ずれを起こし、磁気抵抗素子10aに近づいている状態をそれぞれ示している。
【0120】
仮に、磁石ローター1がCW(時計回り)方向に回転するとすると、磁気抵抗素子10aの出力信号の位相に関し、図15(b),図15(c)の状態では位相が遅れる方向にずれ、図15(d),図15(e)の状態では位相が進む方向にずれることとなる。
【0121】
図16(a)は、図15の各状態での磁気抵抗素子10aからの出力信号を示す図である。同図の各グラフについて示す( )内の英字は、図15の枝番に対応している。図16(a)からも、図15(b),図15(c)の状態では位相が遅れる方向にずれ、図15(d),図15(e)の状態では位相が進む方向にずれることが理解される。
【0122】
このような位相のずれか生ずるのは、軸ぶれにより、磁気抵抗素子10aのピン磁性層の方向にある磁石ローター1から発生する磁束ベクトル(磁束密度)が、変わるためである。
【0123】
軸ぶれ量が常に一定であれば、処理回路で電気的に軸ブレの影響をキャンセルすることも可能であるが、軸ぶれ量が、回転速度・回転方向・周囲環境などによりランダムに変化する場合には、そのような方法でのキャンセルは難しい。そこで、本実施の形態では、磁気抵抗素子12aの出力信号を利用して、軸ブレの影響をキャンセルする。以下、詳しく説明する。
【0124】
図16(b)は、図15の各状態での磁気抵抗素子12aからの出力信号を示す図である。同図の各グラフについて示す( )内の英字は、図15の枝番に対応している。図16(b)と図16(a)を比較すると理解されるように、磁気抵抗素子10aからの出力信号が遅れ位相だと、磁気抵抗素子12aからは進み位相の出力信号が得られ、磁気抵抗素子10aからの出力信号が進み位相だと、磁気抵抗素子12aからは遅れ位相の出力信号が得られる。したがって、磁気抵抗素子10aの出力信号と磁気抵抗素子12aの出力信号とを合成(加算)することにより、軸ぶれが生じたとしても、その影響を打ち消して、軸ぶれによる位相ずれのない信号をつくりだすことができることになる。
【0125】
本実施の形態による回転角・トルクセンサ100では、このような信号合成を信号合成増幅回路24〜27において行っている。したがって、各シャフトの軸ぶれの影響をキャンセルすることが実現されている。
【0126】
図17(a)は、軸ぶれによる影響を受けた磁気抵抗素子10aからの出力信号の実測値を示す図である。同図には、図15(a)(c)(e)の各状態での出力信号を示している。なお、実測にあたり、磁石ローター1のぶれの大きさは、X方向,Y方向それぞれについて100μmとした。図17(a)によれば、位相ずれによる出力信号レベルの変動は約±20mVあり、換算すると、約±6degという非常に大きい角度誤差となる。
【0127】
図17(b)は、信号合成増幅回路で合成された信号S24の実測値を示す図である。測定条件は図17(a)と同一である。図17(b)から明らかなように、合成された信号S24では、軸ぶれの影響がキャンセルされ、位相のずれがほとんど発生しなくなっている。すなわち、各シャフトの軸ぶれの影響をキャンセルすることが実現されている。
【0128】
ここで、磁石ローターの周期数が奇数となる場合の磁気抵抗素子の配置について、再度説明する。図18は、周期数が奇数(具体的には9)である磁石ローター2の平面図である。同図に示すように、周期数が奇数である磁石ローター2を用いる場合に軸ぶれの影響をキャンセルするためには、2つの磁気抵抗素子を、180degではなく、180deg+S極(又は、N極)1極分、互いにずらした位置に配置し、これらからの出力信号を合成する。こうすることで、磁石ローターの周期数が奇数であっても、磁気抵抗素子の出力信号が互いに打ち消しあってしまうことがなくなり、軸ぶれによる角度誤差の発生を抑えることが可能になる。
【0129】
以上説明したように、本実施形態による回転角・トルクセンサ100によれば、磁石ローター1により生成される磁界を検出する磁気センサを2組(第1及び第3の磁気センサ10,12)用意するとともに、磁石ローター2により生成される磁界を検出する磁気センサを2組(第2及び第4の磁気センサ11,13)用意し、第1及び第3の磁気センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁気センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角及びトルクを算出するようにしたので、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。
【0130】
図19は、本発明の第4の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁気抵抗素子10b,11b,12b,13bを有しない点、及びこれらに対応する信号合成増幅回路25,27を有しない点で、第3の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に、詳しく説明する。
【0131】
図20(a)は、信号合成増幅回路24,26の出力信号S24,S26を示す図である。これは、ステアリングの回転に伴い、磁石ローター1及び2が1回転した場合の出力信号S24,S26のグラフを示したものである。出力信号S24,S26の波長が異なっているのは、第3の実施の形態で説明したように、磁石ローター1と磁石ローター2とで、磁極数が異なるからである。ここでは、磁石ローター1は20極(N+S)とし、磁石ローター2は18極(N+S)としている。
【0132】
出力信号S24,S26は、演算回路30に入力される。演算回路30は、これら出力信号S24,S26を取り込んだ後、まずA/D変換を行い、デジタルデータに変換する。その後、第1のシャフト4の電気角φ1と第2のシャフト5の電気角φ2とを算出するのであるが、ここではtan演算は使えないので、正弦波から直接各電気角を算出する。
【0133】
図20(b)は、横軸をステアリングの操舵角とし、縦軸を電気角として、電気角φ1,φ2及び電気角差信号Dをプロットした図である。この図は、前掲の図13(c)と同様であるので、以降の処理は第3の実施の形態と同様に実施することができ、ステアリングの操舵角とトルクとを算出できる。
【0134】
本実施形態による回転角・トルクセンサ100によっても、第3の実施の形態と同様、磁石ローター1により生成される磁界を検出する磁気センサを2組(第1及び第3の磁気センサ10,12)用意するとともに、磁石ローター2により生成される磁界を検出する磁気センサを2組(第2及び第4の磁気センサ11,13)用意し、第1及び第3の磁気センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁気センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角及びトルクを算出するようにしたので、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。
【0135】
図21は、本発明の第5の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、周期数が奇数となる磁石ローター2の近傍に配置される第4の磁気センサ13の配置、及び信号合成増幅回路26,27に代えて信号差動増幅回路28,29を有する点で、第3の実施の形態による回転角・トルクセンサ100と相違する。以下、相違点を中心に、詳しく説明する。
【0136】
本実施の形態では、第4の磁気センサ13を構成する磁気抵抗素子13a,13bはそれぞれ、対応する磁気抵抗素子11a,11bと180deg互いにずらした位置に配置される。したがって、磁気抵抗素子13a,13bの出力信号の位相は、磁気抵抗素子11a,11bの出力と逆位相になる。
【0137】
磁気抵抗素子11a,13aの出力信号は信号差動増幅回路28に入力され、磁気抵抗素子11b,13bの出力信号は信号差動増幅回路29に入力される。信号差動増幅回路28,29はそれぞれ、入力された2つの出力信号に第2の演算を施し、さらに増幅処理も施して、演算回路30に出力する。本実施の形態では、第2の演算は、2つの出力信号の差分を算出する差動演算である。
【0138】
仮に、第3の実施の形態と同様に第2の演算が加算演算であったとすると、入力される2つの出力信号が互いに逆位相であることから、これらは互いに打ち消しあい、演算結果としての信号差動増幅回路28,29の出力信号S28,S29の振幅は、ゼロか又は著しく小さな値となる。しかしながら、本実施の形態では第2の演算を差動演算としているので、出力信号S28,S29は有意な振幅を有する信号となる。こうして得られる出力信号S28,S29は演算回路30に入力され、演算回路30は、出力信号S24,S25,S28,S29に基づき、第3の実施の形態で説明したものと同様の処理により、ステアリングの操舵角及びトルクを算出する。
【0139】
本実施形態による回転角・トルクセンサ100によれば、磁気抵抗素子13a,13bをそれぞれ、対応する磁気抵抗素子11a,11bと180deg互いにずらした位置に配置しているにもかかわらず、第3の実施の形態と同様、ステアリングの操舵角やトルクに各シャフトの軸ぶれの影響が及ぶことを防止できる。加えて、磁気抵抗素子13a,13bの出力信号と磁気抵抗素子11a,11bの出力信号の間の対称性が第3の実施の形態に比べて良好となることから、より好適に、軸ぶれの影響をキャンセルできるようになる。
【0140】
図22は、本発明の第6の実施の形態による回転角・トルクセンサ100の概略構成を示す説明図である。本実施の形態による回転角・トルクセンサ100は、磁石ローター1,2に代えて多極ローター7,8を有する点と、磁気抵抗素子10a,10b,11a,11b,12a,12b,13a,13bの近傍にそれぞれバイアス磁石40a,40b,41a,41b,42a,42b,43a,43bが配置される点の2点で、第3の実施の形態による回転角・トルクセンサ100と相違する。
【0141】
多極ローター7,8及び各バイアス磁石の構成及び材料は、第2の実施の形態で説明したものと同様であるので、詳しい説明は割愛する。
【0142】
磁気抵抗素子12a,12bはそれぞれ、磁気抵抗素子10a,10bと、回転軸Aの中心軸を通るように多極ローター7を挟んで180deg対向に配置する。磁気抵抗素子10aと磁気抵抗素子10bとは、電気角で90degの位相差を持って配置されており、磁気抵抗素子12aと磁気抵抗素子12bとは、電気角で90degの位相差を持って配置されている。磁気抵抗素子13a,13bはそれぞれ、磁気抵抗素子11a,11bと、回転軸Aの中心軸を通るように多極ローター8を挟んで対向に配置するが、磁気抵抗素子13aは、磁気抵抗素子11aに対して、180+360/(2P2)deg分をずらした位置に配置する。同様に、磁気抵抗素子13bは、磁気抵抗素子11bに対して、180+360/(2P2)deg分をずらした位置に配置する。磁気抵抗素子11aと磁気抵抗素子11bとは、電気角で90degの位相差を持って配置されており、磁気抵抗素子13aと磁気抵抗素子13bとは、電気角で90degの位相差を持って配置されている。
【0143】
本実施の形態による回転角・トルクセンサ100によっても、第2の実施の形態による回転角・トルクセンサ100と同様に、各磁気抵抗素子の出力信号を得ることができる。また、第3の実施の形態による回転角・トルクセンサ100と同様に、軸ぶれの影響をキャンセルすることが実現される。
【0144】
以上、本発明の好ましい実施の形態について説明したが、本発明はこうした実施の形態に何等限定されるものではなく、本発明が、その要旨を逸脱しない範囲において、種々なる態様で実施され得ることは勿論である。
【0145】
例えば、上記実施の形態では、ステアリングの操舵角とトルクの両方を出力する回転角・トルクセンサに本発明を適用した例を取り上げて説明したが、本発明は、トルクのみを出力する回転角・トルクセンサにも適用可能である。
【0146】
最後に、磁気抵抗素子の特性に現れるヒステリシスが本発明による機械角算出の精度に与える影響について、詳しく説明する。
【0147】
磁気抵抗素子と、磁石(磁性体を含む)との組み合わせで回転角度を検出しようとする場合、ヒステリシスが回転角度の精度に及ぼす影響を考慮することが好ましい。通常、モーターなどの回転角度を検出する場合、回転角度が一方向であれば、ヒステリシスはあまり問題にならないが、逆回転をさせる場合には、ヒステリシスが回転角度の精度に与える影響は大きなものとなり、求める精度によっては無視できないものとなるからである。
【0148】
図23(a)は、図2に示した回転角・トルクセンサ100(ただし、磁石ローター1の周期数は5とした。)において、第1のシャフト4をCW(時計回り)方向及びCCW(反時計回り)方向にそれぞれ回転させた場合の、磁気抵抗素子10aからの出力信号(実測値)を示す図である。図23(b)は、図23(a)の一部を拡大した図である。
【0149】
図23より理解されるように、この例では、約2mVのヒステリシスが生じている。これは、磁気抵抗素子自体,磁石自体,磁石の着磁ムラなど複数の影響から生じているものである。
【0150】
2mVのヒステリシスを角度精度に換算すると、角度センサとしては、0.02degの角度誤差に相当する。角度センサとして用いる場合には問題のない精度であるが、トルクセンサとして使用する場合には、無視出来ない誤差精度である。
【0151】
この誤差を補正する手段としては、CW及び、CCW方向でそれぞれキャリブレーションを行い、テーブルを作成すればよい。そして、CW方向に回転している時には、CW方向用のテーブルを参照し、CCW方向に回転している時には、CCW方向用のテーブルを参照し、角度・トルク信号を出力すればよい。このようにCW・CCW用のテーブルを、キャリブレーション時にそれぞれ作成することにより、ヒステリシスの影響を抑えた角度精度の信号を得ることが可能になる。
【産業上の利用可能性】
【0152】
本発明による回転角・トルクセンサは、ステアリングシャフトの操舵角及び操舵トルクの検出等に利用できる。
【符号の説明】
【0153】
1,2 磁石ローター
4,5 シャフト
6 トーションバー
7,8 多極ローター
10〜13 磁気センサ
10a,10b,11a,11b,12a,12b,13a,13b 磁気抵抗素子
20〜23 増幅回路
24〜27 信号合成増幅回路
28,29 信号差動増幅回路
30 演算回路
31,32 電気角算出部
33 電気角差信号生成部
34,35 周期数判定信号生成部
36,37 機械角算出部
38 トルク算出部
39 記憶装置
40a,40b,41a,41b,42a,42b,43a,43b バイアス磁石
100 回転角・トルクセンサ
【特許請求の範囲】
【請求項1】
回転軸の周りを回動可能に構成された第1のシャフトと、
前記回転軸の周りを回動可能に構成された第2のシャフトと、
前記回転軸に沿って配置され、前記第1のシャフトと前記第2のシャフトとを接続するトーションバーと、
それぞれ前記回転軸に対して固定された第1乃至第4の磁気センサと、
前記第1のシャフトの回転に応じて、前記第1及び第3の磁気センサの位置に第1周期数の周期的な第1の磁界を生成する第1の磁界生成手段と、
前記第2のシャフトの回転に応じて、前記第2及び第4の磁気センサの位置に第2周期数の周期的な第2の磁界を生成する第2の磁界生成手段と、
前記第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、前記第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて前記第1及び第2のシャフトそれぞれの機械角を算出するとともに、算出した前記第1及び第2のシャフトそれぞれの前記機械角に基づいて前記第1のシャフトにかかるトルクを算出する演算手段とを備え、
前記第1周期数と前記第2周期数とは互いに異なる
ことを特徴とする回転角・トルクセンサ。
【請求項2】
前記第1周期数が偶数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第1周期数が奇数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置からさらに前記第1の磁界の半周期分ずれた位置に配置され、
前記第2周期数が偶数である場合、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第2周期数が奇数である場合、前記第4の磁界センサは、前記第3の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置からさらに前記第2の磁界の半周期分ずれた位置に配置され、
前記第1及び第2の演算はともに加算演算である
ことを特徴とする請求項1に記載の回転角・トルクセンサ。
【請求項3】
前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第1周期数が偶数である場合、前記第1の演算は加算演算であり、
前記第1周期数が奇数である場合、前記第1の演算は差動演算であり、
前記第2周期数が偶数である場合、前記第2の演算は加算演算であり、
前記第2周期数が奇数である場合、前記第2の演算は差動演算である
ことを特徴とする請求項2に記載の回転角・トルクセンサ。
【請求項4】
前記演算手段は、
前記第1及び第3の磁界センサの出力に前記第1の演算を施すことにより得られる前記演算出力に基づいて前記第1のシャフトの電気角を算出し、
前記第2及び第4の磁界センサの出力に前記第2の演算を施すことにより得られる前記演算出力に基づいて前記第2のシャフトの電気角を算出し、
前記第1のシャフトの電気角と前記第2のシャフトの電気角との差分を示す電気角差信号を生成し、
前記電気角差信号と前記第1のシャフトの前記電気角と前記第1周期数とに基づいて前記第1のシャフトの機械角を算出し、
前記電気角差信号と前記第2のシャフトの前記電気角と前記第2周期数とに基づいて前記第2のシャフトの機械角を算出する
ことを特徴とする請求項1乃至3のいずれか一項に記載の回転角・トルクセンサ。
【請求項5】
前記第1の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第1及び第2の磁気抵抗素子を有し、
前記第1及び第2の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記第2の磁界センサは、前記第2のシャフトの回動方向に沿って並置された第3及び第4の磁気抵抗素子を有し、
前記第3及び第4の磁気抵抗素子は、前記第2の磁界の1/4周期分互いに離隔した位置に設置され、
前記第3の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第5及び第6の磁気抵抗素子を有し、
前記第5及び第6の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記第4の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第7及び第8の磁気抵抗素子を有し、
前記第7及び第8の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記演算手段は、前記第1及び第3の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力と、前記第5及び第6の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力とに基づいて前記第1のシャフトの前記電気角を算出するとともに、前記第2及び第4の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力と、前記第7及び第8の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力とに基づいて前記第2のシャフトの前記電気角を算出する
ことを特徴とする請求項4に記載の回転角・トルクセンサ。
【請求項1】
回転軸の周りを回動可能に構成された第1のシャフトと、
前記回転軸の周りを回動可能に構成された第2のシャフトと、
前記回転軸に沿って配置され、前記第1のシャフトと前記第2のシャフトとを接続するトーションバーと、
それぞれ前記回転軸に対して固定された第1乃至第4の磁気センサと、
前記第1のシャフトの回転に応じて、前記第1及び第3の磁気センサの位置に第1周期数の周期的な第1の磁界を生成する第1の磁界生成手段と、
前記第2のシャフトの回転に応じて、前記第2及び第4の磁気センサの位置に第2周期数の周期的な第2の磁界を生成する第2の磁界生成手段と、
前記第1及び第3の磁界センサの出力に第1の演算を施すことにより得られる演算出力と、前記第2及び第4の磁界センサの出力に第2の演算を施すことにより得られる演算出力とに基づいて前記第1及び第2のシャフトそれぞれの機械角を算出するとともに、算出した前記第1及び第2のシャフトそれぞれの前記機械角に基づいて前記第1のシャフトにかかるトルクを算出する演算手段とを備え、
前記第1周期数と前記第2周期数とは互いに異なる
ことを特徴とする回転角・トルクセンサ。
【請求項2】
前記第1周期数が偶数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第1周期数が奇数である場合、前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置からさらに前記第1の磁界の半周期分ずれた位置に配置され、
前記第2周期数が偶数である場合、前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第2周期数が奇数である場合、前記第4の磁界センサは、前記第3の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置からさらに前記第2の磁界の半周期分ずれた位置に配置され、
前記第1及び第2の演算はともに加算演算である
ことを特徴とする請求項1に記載の回転角・トルクセンサ。
【請求項3】
前記第3の磁界センサは、前記第1の磁界センサから前記第1のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第4の磁界センサは、前記第2の磁界センサから前記第2のシャフトの回動方向に沿って180°異なる位置に配置され、
前記第1周期数が偶数である場合、前記第1の演算は加算演算であり、
前記第1周期数が奇数である場合、前記第1の演算は差動演算であり、
前記第2周期数が偶数である場合、前記第2の演算は加算演算であり、
前記第2周期数が奇数である場合、前記第2の演算は差動演算である
ことを特徴とする請求項2に記載の回転角・トルクセンサ。
【請求項4】
前記演算手段は、
前記第1及び第3の磁界センサの出力に前記第1の演算を施すことにより得られる前記演算出力に基づいて前記第1のシャフトの電気角を算出し、
前記第2及び第4の磁界センサの出力に前記第2の演算を施すことにより得られる前記演算出力に基づいて前記第2のシャフトの電気角を算出し、
前記第1のシャフトの電気角と前記第2のシャフトの電気角との差分を示す電気角差信号を生成し、
前記電気角差信号と前記第1のシャフトの前記電気角と前記第1周期数とに基づいて前記第1のシャフトの機械角を算出し、
前記電気角差信号と前記第2のシャフトの前記電気角と前記第2周期数とに基づいて前記第2のシャフトの機械角を算出する
ことを特徴とする請求項1乃至3のいずれか一項に記載の回転角・トルクセンサ。
【請求項5】
前記第1の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第1及び第2の磁気抵抗素子を有し、
前記第1及び第2の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記第2の磁界センサは、前記第2のシャフトの回動方向に沿って並置された第3及び第4の磁気抵抗素子を有し、
前記第3及び第4の磁気抵抗素子は、前記第2の磁界の1/4周期分互いに離隔した位置に設置され、
前記第3の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第5及び第6の磁気抵抗素子を有し、
前記第5及び第6の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記第4の磁界センサは、前記第1のシャフトの回動方向に沿って並置された第7及び第8の磁気抵抗素子を有し、
前記第7及び第8の磁気抵抗素子は、前記第1の磁界の1/4周期分互いに離隔した位置に設置され、
前記演算手段は、前記第1及び第3の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力と、前記第5及び第6の磁気抵抗素子の出力に前記第1の演算を施すことにより得られる演算出力とに基づいて前記第1のシャフトの前記電気角を算出するとともに、前記第2及び第4の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力と、前記第7及び第8の磁気抵抗素子の出力に前記第2の演算を施すことにより得られる演算出力とに基づいて前記第2のシャフトの前記電気角を算出する
ことを特徴とする請求項4に記載の回転角・トルクセンサ。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】

【図17】
【図18】
【図19】
【図20】
【図21】

【図22】

【図23】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−42353(P2012−42353A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−184284(P2010−184284)
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
[ Back to top ]