
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主に自動車のブレーキペダル等の回転角度の検出に用いられる回転角度検出装置に関するものである。
【背景技術】
【0002】
近年、自動車の高機能化が進むなか、様々な回転角度検出装置や各種スイッチ等を用いてブレーキペダル等の踏み込み量や回転角度を検出し、車両の多様な制御を行うものが増えている。
【0003】
このような、従来の回転角度検出装置やストップランプ制御用のプッシュスイッチについて、図14及び図15を用いて説明する。
【0004】
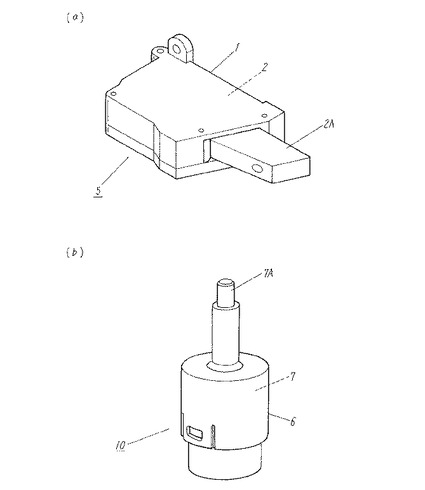
図14(a)は従来の回転角度検出装置の斜視図であり、同図において、略箱型で絶縁樹脂製のケース1内には回転体2が回転可能に収納されると共に、回転体2の一端にはケース1の側面開口部から外方へ突出するレバー2Aが設けられている。
【0005】
そして、ケース1内側壁と回転体2の間には、コイル状のばね(図示せず)がやや撓んだ状態で装着され、このばねによって回転体2が所定角度に付勢されて、レバー2Aが所定の位置に保持されている。
【0006】
さらに、回転体2には磁石(図示せず)が装着されると共に、この磁石と所定の間隙を空けて、ホール素子等の磁気検出素子(図示せず)がケース1内に対向配置されて、回転角度検出装置5が構成されている。
【0007】
また、図14(b)は従来のプッシュスイッチの斜視図であり、同図において、略箱型で絶縁樹脂製のケース6内には作動体7が上下動可能に収納されると共に、作動体7上端の操作軸7Aがケース6上面から上方へ突出している。
【0008】
そして、ケース6内底面と作動体7下端の間には、コイル状のばね(図示せず)がやや撓んだ状態で装着され、このばねによって作動体7が上方へ付勢されている。
【0009】
さらに、ケース6内には作動体7に装着された導電金属製の可動接点(図示せず)や、ケース6に植設された固定接点(図示せず)によって、スイッチ接点が形成されてプッシュスイッチ10が構成されている。
【0010】
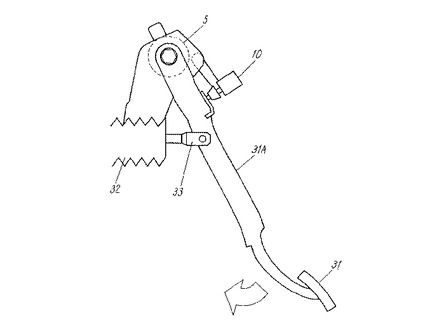
そして、このように構成された回転角度検出装置5が、図15の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー2Aが装着されると共に、磁気検出素子がリード線やコネクタ(図示せず)等によって、車両の電子回路(図示せず)等に接続される。
【0011】
また、プッシュスイッチ10がブレーキペダル31の手前に、アーム31Aによって操作軸7Aが押圧された状態で装着されると共に、スイッチ接点がリード線やコネクタ等によって、車両のストップランプ(図示せず)や電子回路等に接続される。
【0012】
つまり、図15に示すようにブレーキペダル31が踏み込まれず、シリンダボディ32内から突出したプッシュロッド33が伸びた状態では、プッシュスイッチ10の作動体7がばねを撓めながら押圧操作されて、可動接点が固定接点から離れ、スイッチ接点が電気的に切断された状態となっているため、ストップランプは消灯した状態となっている。
【0013】
以上の構成において、ブレーキペダル31が踏み込まれると、アーム31Aが回動してプッシュスイッチ10の操作軸7A先端から離れ、押圧力が除かれるため、ばねの弾性復帰力によって作動体7が元の位置へ移動すると共に、可動接点が固定接点に接触して、スイッチ接点が電気的に接続された状態となり、ストップランプが点灯する。
【0014】
また、ブレーキペダル31の回動に伴って、回転角度検出装置5のレバー2Aが揺動して、ばねを撓めながら回転体2が回転し、回転体2に装着された磁石も回転するため、磁石から対向した磁気検出素子へ流れる磁界の方向が変化する。
【0015】
そして、この磁気の強弱を磁気検出素子が検出し、磁気検出素子から出力された角度信号によって、車両の電子回路が回転体2の回転角度、すなわちブレーキペダル31の踏み込み量を算出して、この踏み込み量に応じた車両の様々な制御が行われる。
【0016】
つまり、ブレーキペダル31の操作によって、プッシュスイッチ10の作動体7を上下動させ、スイッチ接点の電気的接離を行うことで、ストップランプの消点灯を行うと共に、回転角度検出装置5の回転体2と磁石を回転させ、磁気検出素子が検出した磁気の変化から、電子回路が回転体2の回転角度、すなわちブレーキペダル31の踏み込み量を検出して、車両の様々な制御が行われるように構成されているものであった。
【0017】
なお、この出願の発明に関連する先行技術文献情報としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2001−317909号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、上記従来の回転角度検出装置5やプッシュスイッチ10においては、これらを車両のブレーキペダル31に装着する際、回転体2をやや回転させた状態で、回転角度検出装置5をブレーキペダル31の回動軸近傍に装着すると共に、ブレーキペダル31が踏み込まれた状態では、スイッチ接点が電気的に確実に接続され、踏み込まれていない状態ではスイッチ接点が電気的に確実に切断されるように、取付け位置を調整しながら、プッシュスイッチ10をブレーキペダル31に装着する必要があるため、構成部品数も多く、取付けにも手間がかかってしまうという課題があった。
【0020】
本発明は、このような従来の課題を解決するものであり、ブレーキペダル等への装着が容易に行え、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0021】
上記目的を達成するために本発明は、特に、回転体に装着された磁石の回転中心に対して、所定角度間隔で複数の磁気検出素子を対向配置すると共に、制御回路が複数の磁気検出素子からの検出信号を加算または減算して、回転体の回転角度を検出するようにして回転角度検出装置を構成したものである。
【発明の効果】
【0022】
本発明によれば、回転体に装着された磁石の回転中心に対して、所定角度間隔で複数の磁気検出素子を対向配置すると共に、制御回路が複数の磁気検出素子からの検出信号を加算または減算して、回転体の回転角度を検出するように構成したことにより、制御回路が複数の磁気検出素子からの検出信号を加算または減算することで、高精度な回転角度の検出が行えると共に、ストップランプの消点灯を行うためのスイッチング信号も、一つの制御回路から出力できるので、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施の形態による回転角度検出装置の断面図
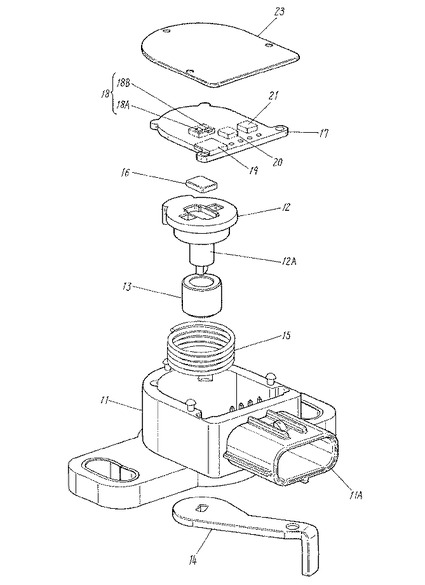
【図2】同分解斜視図
【図3】同部分斜視図
【図4】同ブロック回路図
【図5】同側面図
【図6】同波形図
【図7】本発明の第2の実施の形態による回転角度検出装置のブロック回路図
【図8】同波形図
【図9】同波形図
【図10】本発明の第3の実施の形態による回転角度検出装置の断面図
【図11】同分解斜視図
【図12】同ブロック回路図
【図13】同ブロック回路図
【図14】従来の回転角度検出装置とプッシュスイッチの斜視図
【図15】同側面図
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について、図1〜図13を用いて説明する。
【0025】
(実施の形態1)
実施の形態1を用いて、本発明の特に請求項1記載の発明について説明する。
【0026】
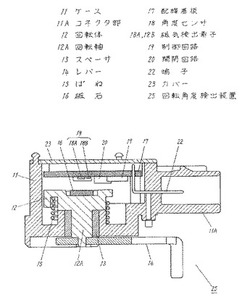
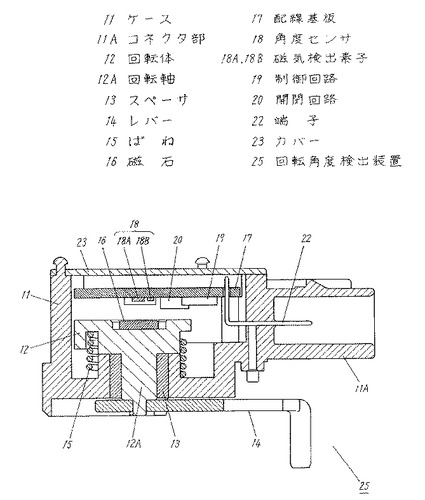
図1は本発明の第1の実施の形態による回転角度検出装置の断面図、図2は同分解斜視図であり、同図において、11は上面開口で略箱型のポリブチレンテレフタレート等の絶縁樹脂製のケース、12は略円柱状で同じく絶縁樹脂製の回転体で、回転体12下面に突出した回転軸12Aが、略円筒状で含油金属製のスペーサ13を介してケース11内底面に挿入されて、回転体12がケース11内に回転可能に収納されている。
【0027】
また、14は鋼板等の金属製のレバーで、レバー14の一端がケース11下面から突出した回転軸12A下端に、かしめ等によって固着されると共に、レバー14の他端はケース11外方へ延出している。
【0028】
そして、15はコイル状に巻回された鋼線または銅合金製のばねで、やや捩られた状態のばね15の上端が回転体12に、下端がケース11内底面に各々係止され、このばね15によって回転体12が所定角度に付勢されて、レバー14が所定の位置に保持されている。
【0029】
さらに、16は略直方体状でフェライトやNd−Fe−B合金等の磁石で、この磁石16が左右すなわち水平方向にN極とS極を向けて、中心が回転体12の回転中心に一致するように、接着やインサート成形等によって回転体12上面に装着固定されている。
【0030】
そして、17は紙フェノールやガラス入りエポキシ等の配線基板で、上下面には銅箔等によって複数の配線パターン(図示せず)が形成されると共に、回転体12上面に水平になるようにして、ケース11上方に収納されている。
【0031】
また、18は角度センサで、図3の部分斜視図に示すように、検出面に対して垂直方向の磁気を検出するホール素子やGMR素子等の磁気検出素子18Aと18Bが、磁石16の回転中心に対して、所定角度間隔、例えば90度の間隔で配置されて形成されると共に、この角度センサ18が磁石16真上の配線基板17下面の配線パターンに半田付け等によって実装され、磁石16と所定の間隙を空けて対向配置されている。
【0032】
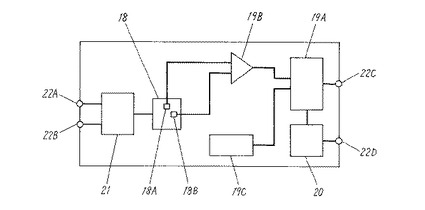
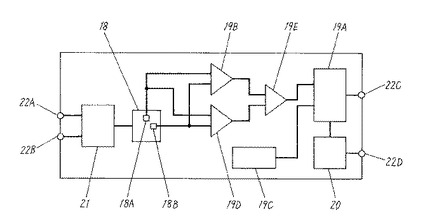
さらに、19は配線基板17に実装された制御回路で、図4のブロック回路図に示すように、マイコン等の制御部19Aと、オペアンプやコンパレータ等の演算部19B、固定または可変抵抗器等の設定部19Cから形成されると共に、演算部19Bが磁気検出素子18Aと18Bに、演算部19Bと設定部19Cが制御部19Aに各々接続されている。
【0033】
また、20は接点式のリレーや、GaNやSiC等を用いた半導体リレー等の開閉回路、21はバリスタやツェナーダイオード等の保護回路で、開閉回路20が制御部19Aに接続されると共に、保護回路21が角度センサ18に接続されている。
【0034】
そして、22は略L字状で銅合金等の端子で、ケース11側面にインサート成形等によって植設されると共に、複数の端子22の一端が配線パターンを介して、端子22Aと22Bが保護回路21に、端子22Cが制御部19Aに、端子22Dが開閉回路20に各々接続されると共に、端子22の他端が略角筒状のコネクタ部11A内に延出している。
【0035】
さらに、23は鉄板等のカバーで、このカバー23がケース11の上面開口部を覆うと共に、ケース11上面にかしめ等によって固着されて、回転角度検出装置25が構成されている。
【0036】
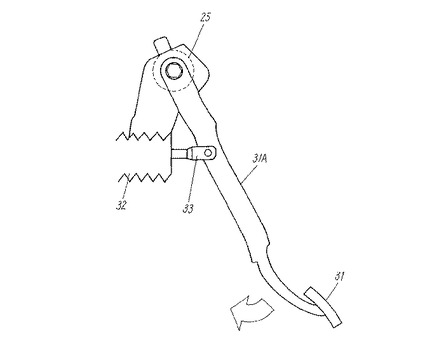
そして、このように構成された回転角度検出装置25が、図5の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー14が装着されると共に、複数の端子22がコネクタやリード線(図示せず)等によって、端子22Aと22Bがバッテリー等の電源とグランドに、端子22Cが車両の電子回路に、端子22Dがストップランプ(図示せず)等に各々接続されて、自動車に装着される。
【0037】
なお、図5に示すようにブレーキペダル31が踏み込まれず、シリンダボディ32内から突出したプッシュロッド33が伸びた状態では、端子22Dを介してストップランプに接続された開閉回路20が、電気的に切断された状態となっているため、ストップランプは消灯した状態となっている。
【0038】
以上の構成において、ブレーキペダル31が踏み込まれると、このブレーキペダル31の回動に伴って、レバー14が揺動して、ばね15を捩りながら回転体12が所定角度、例えば50度前後まで回転し、この回転中心に装着された磁石16も回転するため、磁石16の磁界の方向が変化し、これを磁石16真上に対向配置された磁気検出素子18Aと18Bが検出する。
【0039】
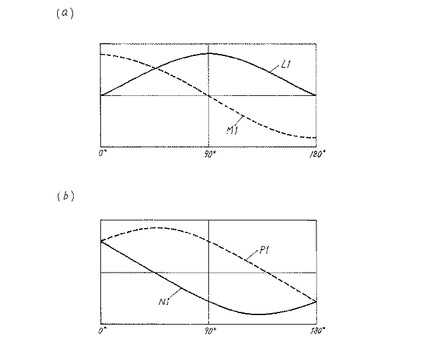
そして、例えば、磁石16と対向した磁気検出素子18Aからは、図6(a)の波形図に示すような正弦波の検出信号L1が、磁気検出素子18Aと90度の間隔で配置された磁気検出素子18Bからは、余弦波の検出信号M1が各々制御回路19の演算部19Bに出力される。
【0040】
さらに、この検出信号L1と検出信号M1を演算部19Bが加算あるいは減算して、例えば図6(b)に示すような、検出信号M1から検出信号L1を減算して演算信号N1を、加算して演算信号P1を各々算出し、この演算信号N1やP1から制御部19Aが回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を算出して、この角度信号が自動車本体の電子回路へ出力され、踏み込み量に応じた車両の様々な制御が行われる。
【0041】
そして、この時、検出信号L1とM1を加算または減算して算出された演算信号N1やP1は、例えば演算信号N1は、実際にブレーキペダル31が踏み込まれ、回転体12が回転する角度である0〜60度前後の間は、ほぼ直線状に変化するものとなるため、この角度の間は高精度な回転角度の検出が行えるようになっている。
【0042】
また、この時、ブレーキペダル31がやや踏み込まれ、回転体12が所定角度、例えば3〜10度前後回転した状態になると、制御回路19がこの回転角度を検出し、制御部19Aから開閉回路20へ所定のスイッチング信号が出力され、このスイッチング信号によって開閉回路20が電気的に接続された状態となって、ストップランプが点灯する。
【0043】
なお、ブレーキペダル31から足を離すと、ブレーキペダル31が元の位置に戻ると共に、回転体12とケース11の間に装着されたばね15によって、回転体12が所定角度に付勢されて、レバー14が元の位置に復帰し、制御部19Aからスイッチング信号が出力されて、開閉回路20が切断された状態となり、ストップランプが消灯する。
【0044】
つまり、磁気検出素子18Aと18Bが検出した磁石16の磁気の変化から、制御回路19が回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を検出し、これを角度信号として電子回路へ出力すると共に、ブレーキペダル31の踏み込み量に応じて、スイッチング信号を出力して開閉回路20の電気的接離を行い、これによってストップランプの消点灯が行われるように構成されている。
【0045】
すなわち、制御回路19が磁気検出素子18Aと18Bからの磁気に応じて、回転体12の回転角度を角度信号として電子回路へ出力し、これによって車両の様々な制御が行われると共に、スイッチング信号を開閉回路20へ出力することによって、ストップランプの消点灯も行うようになっている。
【0046】
したがって、ストップランプを消点灯するためのプッシュスイッチ等の他の部品を設ける必要はなく、ブレーキペダル31の回動軸近傍に装着した一つの回転角度検出装置25のみで、ブレーキペダル31の踏み込み量の検出も、ストップランプの消点灯も行うことが可能となるため、使用する部品数も少なく、簡易で安価な構成にできると共に、ブレーキペダル31への装着も、短時間で容易に行うことができる。
【0047】
さらに、回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、0〜60度前後の間はほぼ直線状の演算信号N1やP1を用いて、制御回路19が回転体12の回転角度を検出することで、誤差が少なく、高精度な回転角度の検出が行えるように構成されている。
【0048】
このように本実施の形態によれば、回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、プッシュスイッチ等の他の部品が不要となるため、ブレーキペダル等への装着も容易に行うことができ、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができるものである。
【0049】
(実施の形態2)
実施の形態2を用いて、本発明の特に請求項2記載の発明について説明する。
【0050】
なお、回転角度検出装置の構成は、制御回路19の一部の構成を除いて、図1〜図3で示した実施の形態1の場合と同一であるため、説明を省略する。
【0051】
図7は本発明の第2の実施の形態による回転角度検出装置のブロック回路図であり、同図において、制御回路19の設定部19Cが制御部19Aに接続されていることや、端子22Aと22Bが保護回路21に、端子22Cが制御部19Aに、端子22Dが開閉回路20に各々接続されていることは、実施の形態1の場合と同様である。
【0052】
また、磁気検出素子18Aと18Bに、演算部19Bが接続されていることも実施の形態1の場合と同様であるが、磁気検出素子18Aと18Bにはもう一つの演算部19Dが接続されている。
【0053】
さらに、この演算部19Bと19Dが演算部19Eに接続されると共に、演算部19Eが制御部19Aに接続されて制御回路19が形成され、この制御回路19や角度センサ18等が、図1〜図3で示したように、回転体12の回転中心に装着固定された磁石16真上の配線基板17に実装され、磁気検出素子18Aと18Bが磁石16と所定の間隙を空けて対向配置されて、回転角度検出装置25が構成されている。
【0054】
なお、このように構成された回転角度検出装置25が、図5の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー14が装着されると共に、複数の端子22がコネクタやリード線(図示せず)等によって、電源やグランド、車両の電子回路やストップランプ(図示せず)等に各々接続されて自動車に装着されることは、実施の形態1の場合と同様である。
【0055】
以上の構成において、ブレーキペダル31が踏み込まれると、このブレーキペダル31の回動に伴って、レバー14が揺動して、ばね15を捩りながら回転体12が所定角度、例えば50度前後まで回転し、この回転中心に装着された磁石16も回転するため、磁石16の磁界の方向が変化し、これを磁石16真上に対向配置された磁気検出素子18Aと18Bが検出する。
【0056】
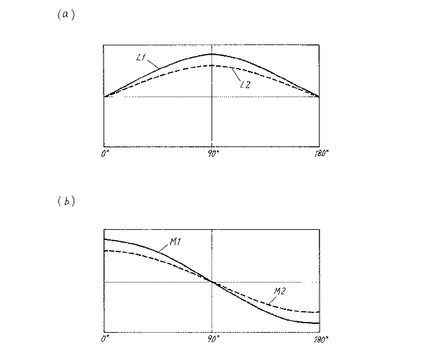
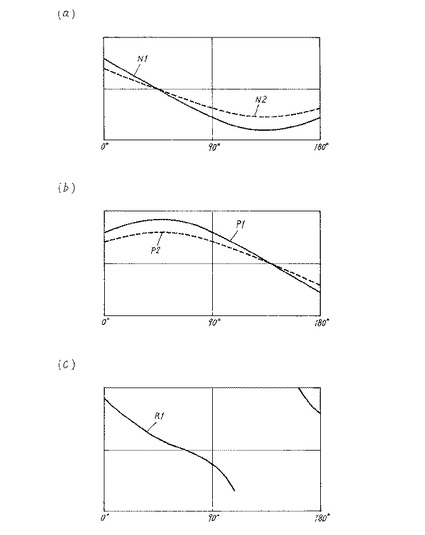
そして、例えば、磁石16と対向した磁気検出素子18Aからは、図8(a)の波形図に示すような、正弦波の検出信号L1が制御回路19の演算部19Bに、磁気検出素子18Aと90度の間隔で配置された磁気検出素子18Bからは、図8(b)に示すような、余弦波の検出信号M1が演算部19Dに各々出力される。
【0057】
ただ、この時、回転角度検出装置25の使用されている周囲の温度が、常温ではなく極端に高温や低温になった場合、例えば高温になった場合には、磁気検出素子18Aや18Bから出力される検出信号が、検出信号L2やM2のように変化してしまい、これらが演算部19Bと19Dに出力される。
【0058】
したがって、この検出信号L2とM2を演算部19Bと19Dが加算あるいは減算した場合、例えば図9(a)や(b)の波形図に示すように、常温での誤差のない検出信号M1から検出信号L1を減算した演算信号N1や、加算した演算信号P1に対して、誤差のあるずれた演算信号N2やP2となってしまう。
【0059】
しかし、本実施の形態においては、この演算信号N2やP2がそのまま制御部19Aへ出力されるのではなく、演算部19Bと19Dから演算部19Eに出力され、これらが演算部19Eで除算される。
【0060】
つまり、例えば図9(c)に示すように、検出信号M2から検出信号L2を減算した演算信号N2を、加算した演算信号P2で除算した演算信号R1が、演算部19Eから制御部19Aへ出力され、この演算信号R1から制御部19Aが回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を算出し、この角度信号が自動車本体の電子回路へ出力されて、踏み込み量に応じた車両の様々な制御が行われる。
【0061】
すなわち、周囲の温度が変化し、磁気検出素子18Aや18Bから出力される検出信号が、検出信号L2やM2のように変化した場合でも、これらを演算部19Bと19Dで加算及び減算した後、さらにこれを演算部19Eで除算して演算信号R1を算出し、演算信号N1やP1よりはやや直線性には劣るが、0〜90度前後の間は直線状に近い演算信号R1を用いて、制御部19Aが回転角度を検出することで、誤差のない高精度な検出が行えるように構成されている。
【0062】
なお、ブレーキペダル31がやや踏み込まれ、回転体12が所定角度、例えば3〜10度前後回転した状態になると、制御回路19がこの回転角度を検出して、制御部19Aから開閉回路20へ所定のスイッチング信号が出力され、このスイッチング信号によって開閉回路20が電気的に接続された状態となって、ストップランプが点灯することや、ブレーキペダル31から足を離した場合には、開閉回路20が切断されてストップランプが消灯することは、実施の形態1の場合と同様である。
【0063】
なお、以上の説明では、略直方体状で水平方向にN極とS極が形成された磁石16を、回転体12上面に装着固定した構成について説明したが、略円柱状の磁石を用いた構成や、あるいはN極とS極を垂直方向に形成した構成としても、本発明の実施は可能である。
【0064】
また、垂直方向の磁気を検出するホール素子やGMR素子等の磁気検出素子18Aと18Bを、90度の間隔で磁石16に対向配置した構成について説明したが、45度の間隔で配置された水平方向の磁気を検出するAMR(異方性磁気抵抗)素子を用いて、これによって回転体12の回転角度を検出する構成としてもよい。
【0065】
さらに、90度の角度間隔で配置された磁気検出素子18Aと18Bに加え、これらに対向するようにもう二つの磁気検出素子を設け、すなわち、四つの磁気検出素子を磁石16の回転中心に対して90度の角度間隔で配置した構成とすることで、外部からの磁気によって図8に示したような、誤差のある検出信号L2やM2が出力された場合にも、高精度で確実な回転角度の検出を行うことが可能となる。
【0066】
つまり、制御回路19がこれらの対向する一対の磁気検出素子からの検出信号を減算することで、例えば磁気検出素子18Aの検出信号から、これに対向した磁気検出素子からの検出信号を減算すると共に、磁気検出素子18Bの検出信号から、これに対向した磁気検出素子からの検出信号を減算することによって、これらの誤差が相殺されるため、誤差のない高精度な回転角度の検出を行うことができるようになる。
【0067】
また、このように四つの磁気検出素子を、磁石16の回転中心に対して90度の角度間隔で配置することによって、これらの磁気検出素子に上下あるいは左右方向の位置ずれが生じた場合にも、検出する磁気の強弱によって制御回路19が、こうした位置ずれを検出できるため、これを補正し誤差のない状態で回転角度の検出を行うことも可能となる。
【0068】
(実施の形態3)
実施の形態3を用いて、本発明の特に請求項3、4記載の発明について説明する。
【0069】
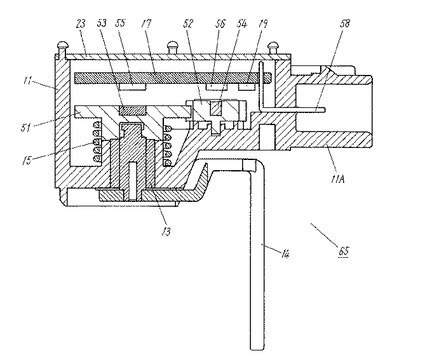
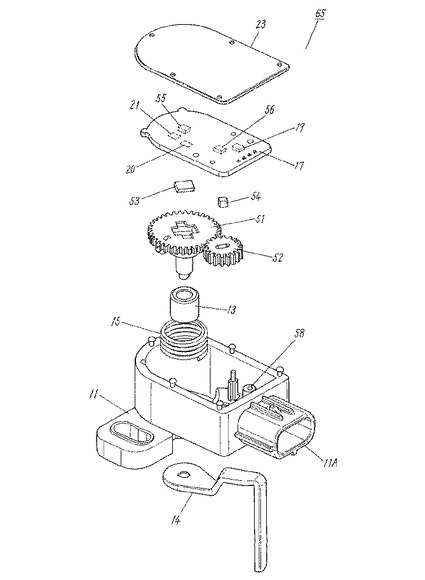
図10は回転角度検出装置65の断面図で、図11は回転角度検出装置65の分解斜視図である。
【0070】
ここで、回転角度検出装置65は、回転角度検出装置25と比較し、以下の点が主として異なる。
【0071】
まず、回転体12に代えて、主回転体51と、主回転体51に連動して回転する副回転体52を備えている。また、磁石16に代えて、主磁石53と副磁石54を備えている。さらに、角度センサ18に代えて、主角度センサ55と副角度センサ56を備えている。そして、端子22に代えて端子58を備えている。
【0072】
この回転角度検出装置65は、主角度センサ55と副角度センサ56で主回転体51の回転角度を検出できるので、主角度センサ55と副角度センサ56のいずれかが故障したとしても、角度信号の出力あるいはストップランプの点灯制御の片方を正しく行うことができるという利点がある。
【0073】
次に、各構成部品について説明する。
【0074】
ここで、主回転体51は歯車で外縁に所定のピッチの歯を備え、副回転体52も歯車で、外縁に主回転体51とほぼ同等のピッチで歯を備えている。この主回転体51と副回転体52は互いの歯が噛み合い連動して回転するもので、副回転体52の直径は主回転体51の直径より小さい。そのため、主回転体51と副回転体52が連動して回転する際に、副回転体52の回転数は主回転体51の回転数より多くなる。
【0075】
また、主磁石53と副磁石54は、略直方体状でフェライトあるいはNd−Fe−B合金等を材料とする。ここで、主磁石53が主回転体51の回転中心に配置され、副磁石54が副回転体52の回転中心に配置され、これらの主磁石53と副磁石54は水平面方向にS極、N極を備える。例えば右端がS極、左端がN極である。そして、主磁石53と副磁石54は、主回転体51、副回転体52の回転に伴い、それぞれ回転する。
【0076】
そして、主角度センサ55が主磁石53に所定の間隙を空けて対向配置され、副角度センサ56が副磁石54に所定の間隙を空けて対向配置される。ここで、主角度センサ55には、検出面に対して垂直方向の磁気を検出するホール素子あるいはGMR素子等の主磁気検出素子55Aと55Bが、主磁石53の回転中心に対して、所定角度間隔、例えば90度の間隔で配置される。同様に副角度センサ56には、副磁気検出素子56Aと56Bが、所定角度間隔、例えば90度の間隔で配置される。
【0077】
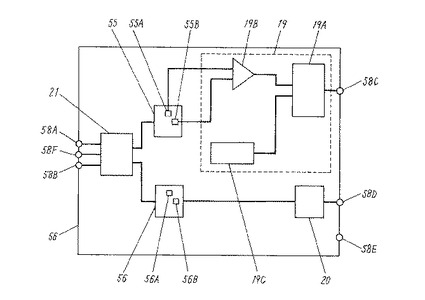
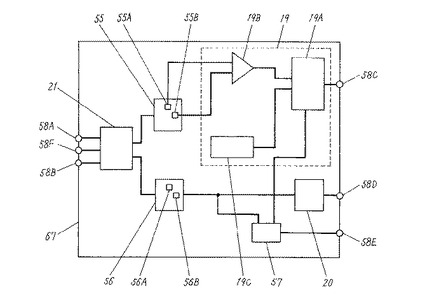
次に図12を用いて、内蔵回路66の構成を説明する。
【0078】
同図において、内蔵回路66は、主角度センサ55と、副角度センサ56と、制御回路19と、開閉回路20と、保護回路21と、端子58の一端となる端子58A〜58Fとを備えている。
【0079】
ここで、制御回路19の設定部19Cが制御部19Aに接続され、端子58Aと58B、58Fが保護回路21に、端子58Cが制御部19Aに、端子58Dが開閉回路20に各々接続される。端子58Eは接続されていない。
【0080】
また、保護回路21は、主角度センサ55と副角度センサ56に接続され、主角度センサ55と副角度センサ56に電源を供給する。ここで、端子58Aが車両の電圧5Vの電子回路に、端子58Bが電圧12Vのバッテリーに、端子58Fはグランド電位に接続される。これにより主角度センサ55には電圧5Vが、副角度センサ56には12Vが供給される。
【0081】
そして、主角度センサ55は主磁気検出素子55A、55Bを備え、主磁気検出素子55Aと55Bは、演算部19Bに接続されている。ここで、主磁気検出素子55A、55Bから出力された検出信号は演算部19Bに入力される。制御回路19は、主角度センサ55から出力された検出信号を基に、端子58Cに角度信号を出力する。なお、制御回路19は、検出信号の割算などを行う第二の制御回路の構成を複合して、あるいは置き換えて、備えても良い。
【0082】
ここで、制御回路19は、回転角度検出装置25の制御回路19と異なり、スイッチング信号を出力しないものである。それ以外の制御回路19の処理は回転角度検出装置25の制御回路19と同様である。
【0083】
そして、副角度センサ56は副磁気検出素子56A、56Bを備えている。また、副磁気検出素子56A、56Bは開閉回路20に接続され、副磁気検出素子56A、56Bから出力された検出信号は開閉回路20に入力される。開閉回路20は、検出信号によって電気的に接続された状態か否かが切り替わり、ストップランプを点灯あるいは消灯する。
【0084】
この副角度センサ56は、制御回路19及び主角度センサ55より、高い電圧で動作するが、動作電流は300マイクロA以下と小さく、小さい電力でストップランプの点灯制御が可能となる。
【0085】
また、内蔵回路66に代えて、図13の内蔵回路67のように構成しても良い。
【0086】
ここで、内蔵回路67の構成は内蔵回路66の構成に比べ、比較回路57が加えられており、比較回路57により、主角度センサ55と、副角度センサ56のいずれかが故障していることを判定することができる。そして、内蔵回路67の制御回路19は、内蔵回路67の制御回路19と異なり、スイッチング信号を出力するものである。
【0087】
また、比較回路57は副角度センサ56と制御回路19と端子58Eに接続される。ここで、比較回路57には制御回路19からスイッチング信号が入力されると共に、副角度センサ56から出力された検出信号が入力される。
【0088】
この比較回路57は、スイッチング信号と副角度センサ56から出力された検出信号を比較し、所定の対応関係にある場合は、主角度センサ55、副角度センサ56は共に正常であると判定する。
【0089】
一方、所定の対応関係から外れている場合は、比較回路57は、主角度センサ55と副角度センサ56のいずれかが故障していると判定し、報知信号を端子58Eから出力する。所定の対応関係にあるか否かは、内蔵回路67の制御回路19の設定部19Cに記憶された所定の基準値を用いて判定する。あるいは、比較回路57の内部に論理回路などで構成し、判定しても良い。なお、比較回路57は、制御回路19に内蔵して構成しても良い。
【0090】
さらに、以上の説明では、磁気検出素子18Aと18Bを一体に形成した角度センサ18を用いると共に、これが実装された配線基板17に制御回路19や開閉回路20等を設けた構成について説明したが、磁気検出素子18Aや18Bを配線基板17に直接実装した構成や、演算部19Eに代えて制御部19Aが除算を行う構成、あるいは、配線基板17には磁気検出素子18Aや18Bのみを設け、制御回路19や開閉回路20等は車両の電子回路側に設けた構成としても、本発明の実施は可能である。
【0091】
また、回転角度検出装置25を用いて、主にブレーキペダル31の踏み込み量の検出と、ストップランプの消点灯を行う構成について説明したが、この他にもクラッチペダルやアクセルペダル等、様々な車両のペダルの動作を検出する構成としても、本発明の実施は可能である。
【0092】
このように本実施の形態によれば、制御回路19が複数の磁気検出素子18Aや18Bからの検出信号を加算及び減算した後、これを除算して回転体12の回転角度を検出することによって、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が行えると共に、周囲の温度変化によって、磁気検出素子18Aや18Bからの検出信号に誤差が生じた場合でも、高精度で確実な回転角度の検出を行うことができるものである。
【0093】
また、主回転体51と副回転体52、主磁石53と副磁石54、主角度センサ55と副角度センサ56を備えて構成しているので、主角度センサ55と副角度センサ56のいずれかが故障したとしても、角度信号の出力あるいはストップランプの点灯制御の片方を正しく行うことができる。
【0094】
さらに、制御回路19と副角度センサ56に接続された比較回路57をさらに備え、比較回路57が、制御回路19から入力されたスイッチング信号と副角度センサ56から入力された検出信号を比較し、所定の対応関係から外れている場合は報知信号を出力するよう構成しているので、主角度センサ55と、副角度センサ56のいずれかが故障していることを判定することができる。
【産業上の利用可能性】
【0095】
本発明による回転角度検出装置は、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能なものを得ることができるという有利な効果を有し、主に自動車のブレーキペダル等の操作用として有用である。
【符号の説明】
【0096】
11 ケース
11A コネクタ部
12 回転体
12A 回転軸
13 スペーサ
14 レバー
15 ばね
16 磁石
17 配線基板
18 角度センサ
18A、18B 磁気検出素子
19 制御回路
19A 制御部
19B、19D、19E 演算部
19C 設定部
20 開閉回路
21 保護回路
22、22A、22B、22C、22D、58、58A〜58F 端子
23 カバー
25、65 回転角度検出装置
31 ブレーキペダル
31A アーム
32 シリンダボディ
33 プッシュロッド
51 主回転体
52 副回転体
53 主磁石
54 副磁石
55 主角度センサ
55A、55B 主磁気検出素子
56 副角度センサ
56A、56B 副磁気検出素子
66、67 内蔵回路
【技術分野】
【0001】
本発明は、主に自動車のブレーキペダル等の回転角度の検出に用いられる回転角度検出装置に関するものである。
【背景技術】
【0002】
近年、自動車の高機能化が進むなか、様々な回転角度検出装置や各種スイッチ等を用いてブレーキペダル等の踏み込み量や回転角度を検出し、車両の多様な制御を行うものが増えている。
【0003】
このような、従来の回転角度検出装置やストップランプ制御用のプッシュスイッチについて、図14及び図15を用いて説明する。
【0004】
図14(a)は従来の回転角度検出装置の斜視図であり、同図において、略箱型で絶縁樹脂製のケース1内には回転体2が回転可能に収納されると共に、回転体2の一端にはケース1の側面開口部から外方へ突出するレバー2Aが設けられている。
【0005】
そして、ケース1内側壁と回転体2の間には、コイル状のばね(図示せず)がやや撓んだ状態で装着され、このばねによって回転体2が所定角度に付勢されて、レバー2Aが所定の位置に保持されている。
【0006】
さらに、回転体2には磁石(図示せず)が装着されると共に、この磁石と所定の間隙を空けて、ホール素子等の磁気検出素子(図示せず)がケース1内に対向配置されて、回転角度検出装置5が構成されている。
【0007】
また、図14(b)は従来のプッシュスイッチの斜視図であり、同図において、略箱型で絶縁樹脂製のケース6内には作動体7が上下動可能に収納されると共に、作動体7上端の操作軸7Aがケース6上面から上方へ突出している。
【0008】
そして、ケース6内底面と作動体7下端の間には、コイル状のばね(図示せず)がやや撓んだ状態で装着され、このばねによって作動体7が上方へ付勢されている。
【0009】
さらに、ケース6内には作動体7に装着された導電金属製の可動接点(図示せず)や、ケース6に植設された固定接点(図示せず)によって、スイッチ接点が形成されてプッシュスイッチ10が構成されている。
【0010】
そして、このように構成された回転角度検出装置5が、図15の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー2Aが装着されると共に、磁気検出素子がリード線やコネクタ(図示せず)等によって、車両の電子回路(図示せず)等に接続される。
【0011】
また、プッシュスイッチ10がブレーキペダル31の手前に、アーム31Aによって操作軸7Aが押圧された状態で装着されると共に、スイッチ接点がリード線やコネクタ等によって、車両のストップランプ(図示せず)や電子回路等に接続される。
【0012】
つまり、図15に示すようにブレーキペダル31が踏み込まれず、シリンダボディ32内から突出したプッシュロッド33が伸びた状態では、プッシュスイッチ10の作動体7がばねを撓めながら押圧操作されて、可動接点が固定接点から離れ、スイッチ接点が電気的に切断された状態となっているため、ストップランプは消灯した状態となっている。
【0013】
以上の構成において、ブレーキペダル31が踏み込まれると、アーム31Aが回動してプッシュスイッチ10の操作軸7A先端から離れ、押圧力が除かれるため、ばねの弾性復帰力によって作動体7が元の位置へ移動すると共に、可動接点が固定接点に接触して、スイッチ接点が電気的に接続された状態となり、ストップランプが点灯する。
【0014】
また、ブレーキペダル31の回動に伴って、回転角度検出装置5のレバー2Aが揺動して、ばねを撓めながら回転体2が回転し、回転体2に装着された磁石も回転するため、磁石から対向した磁気検出素子へ流れる磁界の方向が変化する。
【0015】
そして、この磁気の強弱を磁気検出素子が検出し、磁気検出素子から出力された角度信号によって、車両の電子回路が回転体2の回転角度、すなわちブレーキペダル31の踏み込み量を算出して、この踏み込み量に応じた車両の様々な制御が行われる。
【0016】
つまり、ブレーキペダル31の操作によって、プッシュスイッチ10の作動体7を上下動させ、スイッチ接点の電気的接離を行うことで、ストップランプの消点灯を行うと共に、回転角度検出装置5の回転体2と磁石を回転させ、磁気検出素子が検出した磁気の変化から、電子回路が回転体2の回転角度、すなわちブレーキペダル31の踏み込み量を検出して、車両の様々な制御が行われるように構成されているものであった。
【0017】
なお、この出願の発明に関連する先行技術文献情報としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2001−317909号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、上記従来の回転角度検出装置5やプッシュスイッチ10においては、これらを車両のブレーキペダル31に装着する際、回転体2をやや回転させた状態で、回転角度検出装置5をブレーキペダル31の回動軸近傍に装着すると共に、ブレーキペダル31が踏み込まれた状態では、スイッチ接点が電気的に確実に接続され、踏み込まれていない状態ではスイッチ接点が電気的に確実に切断されるように、取付け位置を調整しながら、プッシュスイッチ10をブレーキペダル31に装着する必要があるため、構成部品数も多く、取付けにも手間がかかってしまうという課題があった。
【0020】
本発明は、このような従来の課題を解決するものであり、ブレーキペダル等への装着が容易に行え、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0021】
上記目的を達成するために本発明は、特に、回転体に装着された磁石の回転中心に対して、所定角度間隔で複数の磁気検出素子を対向配置すると共に、制御回路が複数の磁気検出素子からの検出信号を加算または減算して、回転体の回転角度を検出するようにして回転角度検出装置を構成したものである。
【発明の効果】
【0022】
本発明によれば、回転体に装着された磁石の回転中心に対して、所定角度間隔で複数の磁気検出素子を対向配置すると共に、制御回路が複数の磁気検出素子からの検出信号を加算または減算して、回転体の回転角度を検出するように構成したことにより、制御回路が複数の磁気検出素子からの検出信号を加算または減算することで、高精度な回転角度の検出が行えると共に、ストップランプの消点灯を行うためのスイッチング信号も、一つの制御回路から出力できるので、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施の形態による回転角度検出装置の断面図
【図2】同分解斜視図
【図3】同部分斜視図
【図4】同ブロック回路図
【図5】同側面図
【図6】同波形図
【図7】本発明の第2の実施の形態による回転角度検出装置のブロック回路図
【図8】同波形図
【図9】同波形図
【図10】本発明の第3の実施の形態による回転角度検出装置の断面図
【図11】同分解斜視図
【図12】同ブロック回路図
【図13】同ブロック回路図
【図14】従来の回転角度検出装置とプッシュスイッチの斜視図
【図15】同側面図
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について、図1〜図13を用いて説明する。
【0025】
(実施の形態1)
実施の形態1を用いて、本発明の特に請求項1記載の発明について説明する。
【0026】
図1は本発明の第1の実施の形態による回転角度検出装置の断面図、図2は同分解斜視図であり、同図において、11は上面開口で略箱型のポリブチレンテレフタレート等の絶縁樹脂製のケース、12は略円柱状で同じく絶縁樹脂製の回転体で、回転体12下面に突出した回転軸12Aが、略円筒状で含油金属製のスペーサ13を介してケース11内底面に挿入されて、回転体12がケース11内に回転可能に収納されている。
【0027】
また、14は鋼板等の金属製のレバーで、レバー14の一端がケース11下面から突出した回転軸12A下端に、かしめ等によって固着されると共に、レバー14の他端はケース11外方へ延出している。
【0028】
そして、15はコイル状に巻回された鋼線または銅合金製のばねで、やや捩られた状態のばね15の上端が回転体12に、下端がケース11内底面に各々係止され、このばね15によって回転体12が所定角度に付勢されて、レバー14が所定の位置に保持されている。
【0029】
さらに、16は略直方体状でフェライトやNd−Fe−B合金等の磁石で、この磁石16が左右すなわち水平方向にN極とS極を向けて、中心が回転体12の回転中心に一致するように、接着やインサート成形等によって回転体12上面に装着固定されている。
【0030】
そして、17は紙フェノールやガラス入りエポキシ等の配線基板で、上下面には銅箔等によって複数の配線パターン(図示せず)が形成されると共に、回転体12上面に水平になるようにして、ケース11上方に収納されている。
【0031】
また、18は角度センサで、図3の部分斜視図に示すように、検出面に対して垂直方向の磁気を検出するホール素子やGMR素子等の磁気検出素子18Aと18Bが、磁石16の回転中心に対して、所定角度間隔、例えば90度の間隔で配置されて形成されると共に、この角度センサ18が磁石16真上の配線基板17下面の配線パターンに半田付け等によって実装され、磁石16と所定の間隙を空けて対向配置されている。
【0032】
さらに、19は配線基板17に実装された制御回路で、図4のブロック回路図に示すように、マイコン等の制御部19Aと、オペアンプやコンパレータ等の演算部19B、固定または可変抵抗器等の設定部19Cから形成されると共に、演算部19Bが磁気検出素子18Aと18Bに、演算部19Bと設定部19Cが制御部19Aに各々接続されている。
【0033】
また、20は接点式のリレーや、GaNやSiC等を用いた半導体リレー等の開閉回路、21はバリスタやツェナーダイオード等の保護回路で、開閉回路20が制御部19Aに接続されると共に、保護回路21が角度センサ18に接続されている。
【0034】
そして、22は略L字状で銅合金等の端子で、ケース11側面にインサート成形等によって植設されると共に、複数の端子22の一端が配線パターンを介して、端子22Aと22Bが保護回路21に、端子22Cが制御部19Aに、端子22Dが開閉回路20に各々接続されると共に、端子22の他端が略角筒状のコネクタ部11A内に延出している。
【0035】
さらに、23は鉄板等のカバーで、このカバー23がケース11の上面開口部を覆うと共に、ケース11上面にかしめ等によって固着されて、回転角度検出装置25が構成されている。
【0036】
そして、このように構成された回転角度検出装置25が、図5の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー14が装着されると共に、複数の端子22がコネクタやリード線(図示せず)等によって、端子22Aと22Bがバッテリー等の電源とグランドに、端子22Cが車両の電子回路に、端子22Dがストップランプ(図示せず)等に各々接続されて、自動車に装着される。
【0037】
なお、図5に示すようにブレーキペダル31が踏み込まれず、シリンダボディ32内から突出したプッシュロッド33が伸びた状態では、端子22Dを介してストップランプに接続された開閉回路20が、電気的に切断された状態となっているため、ストップランプは消灯した状態となっている。
【0038】
以上の構成において、ブレーキペダル31が踏み込まれると、このブレーキペダル31の回動に伴って、レバー14が揺動して、ばね15を捩りながら回転体12が所定角度、例えば50度前後まで回転し、この回転中心に装着された磁石16も回転するため、磁石16の磁界の方向が変化し、これを磁石16真上に対向配置された磁気検出素子18Aと18Bが検出する。
【0039】
そして、例えば、磁石16と対向した磁気検出素子18Aからは、図6(a)の波形図に示すような正弦波の検出信号L1が、磁気検出素子18Aと90度の間隔で配置された磁気検出素子18Bからは、余弦波の検出信号M1が各々制御回路19の演算部19Bに出力される。
【0040】
さらに、この検出信号L1と検出信号M1を演算部19Bが加算あるいは減算して、例えば図6(b)に示すような、検出信号M1から検出信号L1を減算して演算信号N1を、加算して演算信号P1を各々算出し、この演算信号N1やP1から制御部19Aが回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を算出して、この角度信号が自動車本体の電子回路へ出力され、踏み込み量に応じた車両の様々な制御が行われる。
【0041】
そして、この時、検出信号L1とM1を加算または減算して算出された演算信号N1やP1は、例えば演算信号N1は、実際にブレーキペダル31が踏み込まれ、回転体12が回転する角度である0〜60度前後の間は、ほぼ直線状に変化するものとなるため、この角度の間は高精度な回転角度の検出が行えるようになっている。
【0042】
また、この時、ブレーキペダル31がやや踏み込まれ、回転体12が所定角度、例えば3〜10度前後回転した状態になると、制御回路19がこの回転角度を検出し、制御部19Aから開閉回路20へ所定のスイッチング信号が出力され、このスイッチング信号によって開閉回路20が電気的に接続された状態となって、ストップランプが点灯する。
【0043】
なお、ブレーキペダル31から足を離すと、ブレーキペダル31が元の位置に戻ると共に、回転体12とケース11の間に装着されたばね15によって、回転体12が所定角度に付勢されて、レバー14が元の位置に復帰し、制御部19Aからスイッチング信号が出力されて、開閉回路20が切断された状態となり、ストップランプが消灯する。
【0044】
つまり、磁気検出素子18Aと18Bが検出した磁石16の磁気の変化から、制御回路19が回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を検出し、これを角度信号として電子回路へ出力すると共に、ブレーキペダル31の踏み込み量に応じて、スイッチング信号を出力して開閉回路20の電気的接離を行い、これによってストップランプの消点灯が行われるように構成されている。
【0045】
すなわち、制御回路19が磁気検出素子18Aと18Bからの磁気に応じて、回転体12の回転角度を角度信号として電子回路へ出力し、これによって車両の様々な制御が行われると共に、スイッチング信号を開閉回路20へ出力することによって、ストップランプの消点灯も行うようになっている。
【0046】
したがって、ストップランプを消点灯するためのプッシュスイッチ等の他の部品を設ける必要はなく、ブレーキペダル31の回動軸近傍に装着した一つの回転角度検出装置25のみで、ブレーキペダル31の踏み込み量の検出も、ストップランプの消点灯も行うことが可能となるため、使用する部品数も少なく、簡易で安価な構成にできると共に、ブレーキペダル31への装着も、短時間で容易に行うことができる。
【0047】
さらに、回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、0〜60度前後の間はほぼ直線状の演算信号N1やP1を用いて、制御回路19が回転体12の回転角度を検出することで、誤差が少なく、高精度な回転角度の検出が行えるように構成されている。
【0048】
このように本実施の形態によれば、回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、プッシュスイッチ等の他の部品が不要となるため、ブレーキペダル等への装着も容易に行うことができ、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができるものである。
【0049】
(実施の形態2)
実施の形態2を用いて、本発明の特に請求項2記載の発明について説明する。
【0050】
なお、回転角度検出装置の構成は、制御回路19の一部の構成を除いて、図1〜図3で示した実施の形態1の場合と同一であるため、説明を省略する。
【0051】
図7は本発明の第2の実施の形態による回転角度検出装置のブロック回路図であり、同図において、制御回路19の設定部19Cが制御部19Aに接続されていることや、端子22Aと22Bが保護回路21に、端子22Cが制御部19Aに、端子22Dが開閉回路20に各々接続されていることは、実施の形態1の場合と同様である。
【0052】
また、磁気検出素子18Aと18Bに、演算部19Bが接続されていることも実施の形態1の場合と同様であるが、磁気検出素子18Aと18Bにはもう一つの演算部19Dが接続されている。
【0053】
さらに、この演算部19Bと19Dが演算部19Eに接続されると共に、演算部19Eが制御部19Aに接続されて制御回路19が形成され、この制御回路19や角度センサ18等が、図1〜図3で示したように、回転体12の回転中心に装着固定された磁石16真上の配線基板17に実装され、磁気検出素子18Aと18Bが磁石16と所定の間隙を空けて対向配置されて、回転角度検出装置25が構成されている。
【0054】
なお、このように構成された回転角度検出装置25が、図5の側面図に示すように、自動車のブレーキペダル31の回動軸近傍の、アーム31Aにレバー14が装着されると共に、複数の端子22がコネクタやリード線(図示せず)等によって、電源やグランド、車両の電子回路やストップランプ(図示せず)等に各々接続されて自動車に装着されることは、実施の形態1の場合と同様である。
【0055】
以上の構成において、ブレーキペダル31が踏み込まれると、このブレーキペダル31の回動に伴って、レバー14が揺動して、ばね15を捩りながら回転体12が所定角度、例えば50度前後まで回転し、この回転中心に装着された磁石16も回転するため、磁石16の磁界の方向が変化し、これを磁石16真上に対向配置された磁気検出素子18Aと18Bが検出する。
【0056】
そして、例えば、磁石16と対向した磁気検出素子18Aからは、図8(a)の波形図に示すような、正弦波の検出信号L1が制御回路19の演算部19Bに、磁気検出素子18Aと90度の間隔で配置された磁気検出素子18Bからは、図8(b)に示すような、余弦波の検出信号M1が演算部19Dに各々出力される。
【0057】
ただ、この時、回転角度検出装置25の使用されている周囲の温度が、常温ではなく極端に高温や低温になった場合、例えば高温になった場合には、磁気検出素子18Aや18Bから出力される検出信号が、検出信号L2やM2のように変化してしまい、これらが演算部19Bと19Dに出力される。
【0058】
したがって、この検出信号L2とM2を演算部19Bと19Dが加算あるいは減算した場合、例えば図9(a)や(b)の波形図に示すように、常温での誤差のない検出信号M1から検出信号L1を減算した演算信号N1や、加算した演算信号P1に対して、誤差のあるずれた演算信号N2やP2となってしまう。
【0059】
しかし、本実施の形態においては、この演算信号N2やP2がそのまま制御部19Aへ出力されるのではなく、演算部19Bと19Dから演算部19Eに出力され、これらが演算部19Eで除算される。
【0060】
つまり、例えば図9(c)に示すように、検出信号M2から検出信号L2を減算した演算信号N2を、加算した演算信号P2で除算した演算信号R1が、演算部19Eから制御部19Aへ出力され、この演算信号R1から制御部19Aが回転体12の回転角度、すなわちブレーキペダル31の踏み込み量を算出し、この角度信号が自動車本体の電子回路へ出力されて、踏み込み量に応じた車両の様々な制御が行われる。
【0061】
すなわち、周囲の温度が変化し、磁気検出素子18Aや18Bから出力される検出信号が、検出信号L2やM2のように変化した場合でも、これらを演算部19Bと19Dで加算及び減算した後、さらにこれを演算部19Eで除算して演算信号R1を算出し、演算信号N1やP1よりはやや直線性には劣るが、0〜90度前後の間は直線状に近い演算信号R1を用いて、制御部19Aが回転角度を検出することで、誤差のない高精度な検出が行えるように構成されている。
【0062】
なお、ブレーキペダル31がやや踏み込まれ、回転体12が所定角度、例えば3〜10度前後回転した状態になると、制御回路19がこの回転角度を検出して、制御部19Aから開閉回路20へ所定のスイッチング信号が出力され、このスイッチング信号によって開閉回路20が電気的に接続された状態となって、ストップランプが点灯することや、ブレーキペダル31から足を離した場合には、開閉回路20が切断されてストップランプが消灯することは、実施の形態1の場合と同様である。
【0063】
なお、以上の説明では、略直方体状で水平方向にN極とS極が形成された磁石16を、回転体12上面に装着固定した構成について説明したが、略円柱状の磁石を用いた構成や、あるいはN極とS極を垂直方向に形成した構成としても、本発明の実施は可能である。
【0064】
また、垂直方向の磁気を検出するホール素子やGMR素子等の磁気検出素子18Aと18Bを、90度の間隔で磁石16に対向配置した構成について説明したが、45度の間隔で配置された水平方向の磁気を検出するAMR(異方性磁気抵抗)素子を用いて、これによって回転体12の回転角度を検出する構成としてもよい。
【0065】
さらに、90度の角度間隔で配置された磁気検出素子18Aと18Bに加え、これらに対向するようにもう二つの磁気検出素子を設け、すなわち、四つの磁気検出素子を磁石16の回転中心に対して90度の角度間隔で配置した構成とすることで、外部からの磁気によって図8に示したような、誤差のある検出信号L2やM2が出力された場合にも、高精度で確実な回転角度の検出を行うことが可能となる。
【0066】
つまり、制御回路19がこれらの対向する一対の磁気検出素子からの検出信号を減算することで、例えば磁気検出素子18Aの検出信号から、これに対向した磁気検出素子からの検出信号を減算すると共に、磁気検出素子18Bの検出信号から、これに対向した磁気検出素子からの検出信号を減算することによって、これらの誤差が相殺されるため、誤差のない高精度な回転角度の検出を行うことができるようになる。
【0067】
また、このように四つの磁気検出素子を、磁石16の回転中心に対して90度の角度間隔で配置することによって、これらの磁気検出素子に上下あるいは左右方向の位置ずれが生じた場合にも、検出する磁気の強弱によって制御回路19が、こうした位置ずれを検出できるため、これを補正し誤差のない状態で回転角度の検出を行うことも可能となる。
【0068】
(実施の形態3)
実施の形態3を用いて、本発明の特に請求項3、4記載の発明について説明する。
【0069】
図10は回転角度検出装置65の断面図で、図11は回転角度検出装置65の分解斜視図である。
【0070】
ここで、回転角度検出装置65は、回転角度検出装置25と比較し、以下の点が主として異なる。
【0071】
まず、回転体12に代えて、主回転体51と、主回転体51に連動して回転する副回転体52を備えている。また、磁石16に代えて、主磁石53と副磁石54を備えている。さらに、角度センサ18に代えて、主角度センサ55と副角度センサ56を備えている。そして、端子22に代えて端子58を備えている。
【0072】
この回転角度検出装置65は、主角度センサ55と副角度センサ56で主回転体51の回転角度を検出できるので、主角度センサ55と副角度センサ56のいずれかが故障したとしても、角度信号の出力あるいはストップランプの点灯制御の片方を正しく行うことができるという利点がある。
【0073】
次に、各構成部品について説明する。
【0074】
ここで、主回転体51は歯車で外縁に所定のピッチの歯を備え、副回転体52も歯車で、外縁に主回転体51とほぼ同等のピッチで歯を備えている。この主回転体51と副回転体52は互いの歯が噛み合い連動して回転するもので、副回転体52の直径は主回転体51の直径より小さい。そのため、主回転体51と副回転体52が連動して回転する際に、副回転体52の回転数は主回転体51の回転数より多くなる。
【0075】
また、主磁石53と副磁石54は、略直方体状でフェライトあるいはNd−Fe−B合金等を材料とする。ここで、主磁石53が主回転体51の回転中心に配置され、副磁石54が副回転体52の回転中心に配置され、これらの主磁石53と副磁石54は水平面方向にS極、N極を備える。例えば右端がS極、左端がN極である。そして、主磁石53と副磁石54は、主回転体51、副回転体52の回転に伴い、それぞれ回転する。
【0076】
そして、主角度センサ55が主磁石53に所定の間隙を空けて対向配置され、副角度センサ56が副磁石54に所定の間隙を空けて対向配置される。ここで、主角度センサ55には、検出面に対して垂直方向の磁気を検出するホール素子あるいはGMR素子等の主磁気検出素子55Aと55Bが、主磁石53の回転中心に対して、所定角度間隔、例えば90度の間隔で配置される。同様に副角度センサ56には、副磁気検出素子56Aと56Bが、所定角度間隔、例えば90度の間隔で配置される。
【0077】
次に図12を用いて、内蔵回路66の構成を説明する。
【0078】
同図において、内蔵回路66は、主角度センサ55と、副角度センサ56と、制御回路19と、開閉回路20と、保護回路21と、端子58の一端となる端子58A〜58Fとを備えている。
【0079】
ここで、制御回路19の設定部19Cが制御部19Aに接続され、端子58Aと58B、58Fが保護回路21に、端子58Cが制御部19Aに、端子58Dが開閉回路20に各々接続される。端子58Eは接続されていない。
【0080】
また、保護回路21は、主角度センサ55と副角度センサ56に接続され、主角度センサ55と副角度センサ56に電源を供給する。ここで、端子58Aが車両の電圧5Vの電子回路に、端子58Bが電圧12Vのバッテリーに、端子58Fはグランド電位に接続される。これにより主角度センサ55には電圧5Vが、副角度センサ56には12Vが供給される。
【0081】
そして、主角度センサ55は主磁気検出素子55A、55Bを備え、主磁気検出素子55Aと55Bは、演算部19Bに接続されている。ここで、主磁気検出素子55A、55Bから出力された検出信号は演算部19Bに入力される。制御回路19は、主角度センサ55から出力された検出信号を基に、端子58Cに角度信号を出力する。なお、制御回路19は、検出信号の割算などを行う第二の制御回路の構成を複合して、あるいは置き換えて、備えても良い。
【0082】
ここで、制御回路19は、回転角度検出装置25の制御回路19と異なり、スイッチング信号を出力しないものである。それ以外の制御回路19の処理は回転角度検出装置25の制御回路19と同様である。
【0083】
そして、副角度センサ56は副磁気検出素子56A、56Bを備えている。また、副磁気検出素子56A、56Bは開閉回路20に接続され、副磁気検出素子56A、56Bから出力された検出信号は開閉回路20に入力される。開閉回路20は、検出信号によって電気的に接続された状態か否かが切り替わり、ストップランプを点灯あるいは消灯する。
【0084】
この副角度センサ56は、制御回路19及び主角度センサ55より、高い電圧で動作するが、動作電流は300マイクロA以下と小さく、小さい電力でストップランプの点灯制御が可能となる。
【0085】
また、内蔵回路66に代えて、図13の内蔵回路67のように構成しても良い。
【0086】
ここで、内蔵回路67の構成は内蔵回路66の構成に比べ、比較回路57が加えられており、比較回路57により、主角度センサ55と、副角度センサ56のいずれかが故障していることを判定することができる。そして、内蔵回路67の制御回路19は、内蔵回路67の制御回路19と異なり、スイッチング信号を出力するものである。
【0087】
また、比較回路57は副角度センサ56と制御回路19と端子58Eに接続される。ここで、比較回路57には制御回路19からスイッチング信号が入力されると共に、副角度センサ56から出力された検出信号が入力される。
【0088】
この比較回路57は、スイッチング信号と副角度センサ56から出力された検出信号を比較し、所定の対応関係にある場合は、主角度センサ55、副角度センサ56は共に正常であると判定する。
【0089】
一方、所定の対応関係から外れている場合は、比較回路57は、主角度センサ55と副角度センサ56のいずれかが故障していると判定し、報知信号を端子58Eから出力する。所定の対応関係にあるか否かは、内蔵回路67の制御回路19の設定部19Cに記憶された所定の基準値を用いて判定する。あるいは、比較回路57の内部に論理回路などで構成し、判定しても良い。なお、比較回路57は、制御回路19に内蔵して構成しても良い。
【0090】
さらに、以上の説明では、磁気検出素子18Aと18Bを一体に形成した角度センサ18を用いると共に、これが実装された配線基板17に制御回路19や開閉回路20等を設けた構成について説明したが、磁気検出素子18Aや18Bを配線基板17に直接実装した構成や、演算部19Eに代えて制御部19Aが除算を行う構成、あるいは、配線基板17には磁気検出素子18Aや18Bのみを設け、制御回路19や開閉回路20等は車両の電子回路側に設けた構成としても、本発明の実施は可能である。
【0091】
また、回転角度検出装置25を用いて、主にブレーキペダル31の踏み込み量の検出と、ストップランプの消点灯を行う構成について説明したが、この他にもクラッチペダルやアクセルペダル等、様々な車両のペダルの動作を検出する構成としても、本発明の実施は可能である。
【0092】
このように本実施の形態によれば、制御回路19が複数の磁気検出素子18Aや18Bからの検出信号を加算及び減算した後、これを除算して回転体12の回転角度を検出することによって、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が行えると共に、周囲の温度変化によって、磁気検出素子18Aや18Bからの検出信号に誤差が生じた場合でも、高精度で確実な回転角度の検出を行うことができるものである。
【0093】
また、主回転体51と副回転体52、主磁石53と副磁石54、主角度センサ55と副角度センサ56を備えて構成しているので、主角度センサ55と副角度センサ56のいずれかが故障したとしても、角度信号の出力あるいはストップランプの点灯制御の片方を正しく行うことができる。
【0094】
さらに、制御回路19と副角度センサ56に接続された比較回路57をさらに備え、比較回路57が、制御回路19から入力されたスイッチング信号と副角度センサ56から入力された検出信号を比較し、所定の対応関係から外れている場合は報知信号を出力するよう構成しているので、主角度センサ55と、副角度センサ56のいずれかが故障していることを判定することができる。
【産業上の利用可能性】
【0095】
本発明による回転角度検出装置は、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能なものを得ることができるという有利な効果を有し、主に自動車のブレーキペダル等の操作用として有用である。
【符号の説明】
【0096】
11 ケース
11A コネクタ部
12 回転体
12A 回転軸
13 スペーサ
14 レバー
15 ばね
16 磁石
17 配線基板
18 角度センサ
18A、18B 磁気検出素子
19 制御回路
19A 制御部
19B、19D、19E 演算部
19C 設定部
20 開閉回路
21 保護回路
22、22A、22B、22C、22D、58、58A〜58F 端子
23 カバー
25、65 回転角度検出装置
31 ブレーキペダル
31A アーム
32 シリンダボディ
33 プッシュロッド
51 主回転体
52 副回転体
53 主磁石
54 副磁石
55 主角度センサ
55A、55B 主磁気検出素子
56 副角度センサ
56A、56B 副磁気検出素子
66、67 内蔵回路
【特許請求の範囲】
【請求項1】
ペダルの回動に伴って回転する回転体と、前記回転体の回転中心に装着された磁石と、前記磁石と所定の間隙を空けて対向配置され前記磁石の回転中心に対して所定角度間隔で配置され検出信号を出力する複数の磁気検出素子と、複数の前記磁気検出素子に接続され前記検出信号を加算または減算して前記回転体の回転角度を検出する制御回路とを備えた回転角度検出装置。
【請求項2】
前記制御回路は、複数の前記磁気検出素子からの検出信号を加算及び減算した後、除算して回転体の回転角度を検出する請求項1記載の回転角度検出装置。
【請求項3】
前記回転体は主回転体と前記主回転体に連動して回転する副回転体から構成され、前記磁石は、前記主回転体の回転中心に配置された主磁石と前記副回転体の回転中心に配置された副磁石とから構成され、前記磁気検出素子は前記主磁石に所定の間隙を空けて対向配置された主磁気検出素子と前記副磁石に所定の間隙を空けて対向配置された副磁気検出素子とから構成され、前記副磁気検出素子に接続され前記副磁気検出素子から入力された検出信号に応じて電気的接離を行う開閉回路をさらに備えた請求項1記載の回転角度検出装置。
【請求項4】
前記回転体は主回転体と前記主回転体に連動して回転する副回転体から構成され、前記磁石は前記主回転体の回転中心に配置された主磁石と前記副回転体の回転中心に配置された副磁石とから構成され、前記磁気検出素子は前記主磁石に所定の間隙を空けて対向配置された主磁気検出素子と前記副磁石に所定の間隙を空けて対向配置された副磁気検出素子とから構成され、前記制御回路と前記副磁気検出素子に接続され前記制御回路から入力されたスイッチング信号と前記副磁気検出素子から入力された検出信号を比較し所定の対応関係から外れている場合は報知信号を出力する比較回路をさらに備えた請求項1記載の回転角度検出装置。
【請求項1】
ペダルの回動に伴って回転する回転体と、前記回転体の回転中心に装着された磁石と、前記磁石と所定の間隙を空けて対向配置され前記磁石の回転中心に対して所定角度間隔で配置され検出信号を出力する複数の磁気検出素子と、複数の前記磁気検出素子に接続され前記検出信号を加算または減算して前記回転体の回転角度を検出する制御回路とを備えた回転角度検出装置。
【請求項2】
前記制御回路は、複数の前記磁気検出素子からの検出信号を加算及び減算した後、除算して回転体の回転角度を検出する請求項1記載の回転角度検出装置。
【請求項3】
前記回転体は主回転体と前記主回転体に連動して回転する副回転体から構成され、前記磁石は、前記主回転体の回転中心に配置された主磁石と前記副回転体の回転中心に配置された副磁石とから構成され、前記磁気検出素子は前記主磁石に所定の間隙を空けて対向配置された主磁気検出素子と前記副磁石に所定の間隙を空けて対向配置された副磁気検出素子とから構成され、前記副磁気検出素子に接続され前記副磁気検出素子から入力された検出信号に応じて電気的接離を行う開閉回路をさらに備えた請求項1記載の回転角度検出装置。
【請求項4】
前記回転体は主回転体と前記主回転体に連動して回転する副回転体から構成され、前記磁石は前記主回転体の回転中心に配置された主磁石と前記副回転体の回転中心に配置された副磁石とから構成され、前記磁気検出素子は前記主磁石に所定の間隙を空けて対向配置された主磁気検出素子と前記副磁石に所定の間隙を空けて対向配置された副磁気検出素子とから構成され、前記制御回路と前記副磁気検出素子に接続され前記制御回路から入力されたスイッチング信号と前記副磁気検出素子から入力された検出信号を比較し所定の対応関係から外れている場合は報知信号を出力する比較回路をさらに備えた請求項1記載の回転角度検出装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−112932(P2012−112932A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2011−170680(P2011−170680)
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]