
回転角度検出装置
【課題】簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供する。
【解決手段】第1のメインギヤ1はステアリングシャフト106の入力軸5に、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体であり、トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1,第2の検出ギヤ3,4はそれぞれメインギヤ1,2の歯車に係合するように設けられた回転体であり、中央部には磁石8,9が配置されている。磁気式角度センサ10,11は検出ギヤ3と検出ギヤ4との間に設けられた基板12上に配置され、対向する磁石8,9の磁界方向を検出し、これらの出力信号に基づいて回転角度演算手段13によって検出ギヤ3,4の多回転の回転角度θm1,θm2が算出され、メインギヤ1,2の多回転の回転角度θmが検出できる。
【解決手段】第1のメインギヤ1はステアリングシャフト106の入力軸5に、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体であり、トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1,第2の検出ギヤ3,4はそれぞれメインギヤ1,2の歯車に係合するように設けられた回転体であり、中央部には磁石8,9が配置されている。磁気式角度センサ10,11は検出ギヤ3と検出ギヤ4との間に設けられた基板12上に配置され、対向する磁石8,9の磁界方向を検出し、これらの出力信号に基づいて回転角度演算手段13によって検出ギヤ3,4の多回転の回転角度θm1,θm2が算出され、メインギヤ1,2の多回転の回転角度θmが検出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のパワーステアリング等に用いられる回転角度検出装置に関するものであり、特にステアリングの回転角度とトルクの検出を同時に可能とする回転角度検出装置に関するものである。
【背景技術】
【0002】
従来、回転角度及びトルクを同時に検出する方式として、磁気式角度センサと着磁した回転体を使用した一体形構造による方式が知られている。ステアリングに操舵力が働くと、ステアリングシャフトに装着された2つの回転体間で回転差が生じ、これをトルクとして検出できる。また、上記回転体の一方は、ステアリングの回転に応じて同様に回転するので、同時に回転角度も検出できる。(例えば、特許文献1参照)
【0003】
しかしながら、このように構成された回転角度検出装置においては、1回転の相対回転角の検出しかできず、多回転の回転角度の検出ができないという課題がある。このため、ステアリングシャフトの入力軸と出力軸にそれぞれ外周面に交互に極性の異なる磁極が着磁してある第1及び第2の回転体を連結し、中心部に磁石を配置した第3の回転体を入力軸側の回転体に噛合させ、それぞれの回転体の回転角度を検出する検出手段を設けて多回転の回転角度およびトルク検出を行っている。(例えば、特許文献2参照)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−317702号公報
【特許文献2】特開2006−220529号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように多回転の回転角度を求める場合、回転数を検出する手段が必要となる。また、この回転数を検出する手段の搭載スペース及びコストが必要という問題がある。
このため、回転角度の検出手段を増やすことなく、簡単な構成で多回転の回転角度及びトルクを検出できる回転角度検出装置を得ることが課題となっている。
【0006】
本発明は、上記課題を解決するためになされたものであり、その目的は、簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に記載の発明は、ステアリングシャフトの入力軸と出力軸の間にトーションバーを設け、前記ステアリングシャフトの入力軸に連動して回転する第1のメインギヤと、前記第1のメインギヤに連動して回転する第1の検出ギヤと、
前記第1の検出ギヤに設けた第1の被検出部材と、前記ステアリングシャフトの出力軸に連動して回転する第2のメインギヤと、前記第2のメインギヤに連動して回転する第2の検出ギヤと、前記第2の検出ギヤに設けた第2の被検出部材と、前記第1の検出ギヤと前記第2の検出ギヤとの間に設けられ、前記第1の被検出部材と前記第2の被検出部材にそれぞれ対向し、前記第1の検出ギヤ及び前記第2の検出ギヤの回転をそれぞれ検出する第1の検出手段及び第2の検出手段と、前記第1の検出手段及び前記第2の検出手段から出力されるそれぞれの信号から前記ステアリングシャフトの多回転の回転角度を算出する回転角度演算手段とを備えた回転角度検出装置であることを要旨とする。
【0008】
上記構成によれば、ステアリングシャフトの入力軸及び出力軸に連結した第1,第2のメインギヤと第1,第2の検出ギヤ及び第1,第2の検出手段によりそれぞれ回転を検出し、回転角度演算手段により回転角度を算出し、これらの回転角度より多回転の回転角度を検出できる。
【0009】
請求項2に記載の発明は、前記回転角度演算手段は、前記第1の検出手段と前記第2の検出手段に基づいて前記第1の検出ギヤと前記第2の検出ギヤの回転角度を算出する検出角度演算手段と、前記第1の検出ギヤ及び前記第2の検出ギヤの回転回数を決定する回転回数決定手段とに基づき、前記多回転の回転角度を算出することを要旨とする。
【0010】
上記構成によれば、第1,第2の検出ギヤの回転角度、回転回数及び多回転の回転角度を第1,第2の検出手段から出力される信号からそれぞれ演算処理により求め、ステアリングシャフトの多回転の回転角度を検出することができる。
【0011】
請求項3に記載の発明は、前記第1のメインギヤと前記第2のメインギヤは歯数が同一であり、前記第1の検出ギヤと前記第2の検出ギヤは歯数が異なるとともに、前記第1の検出ギヤ及び前記第2の検出ギヤの歯数は、前記第1のメインギヤ及び前記第2のメインギヤの歯数とは異なることを要旨とする。
【0012】
上記構成によれば、入力軸と出力軸に異なったギヤ比の検出ギヤを設けることにより、ステアリングの操舵範囲内(いわゆるロックtoロック)での回転数を検出することができる。
【0013】
請求項4に記載の発明は、請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記回転角度演算手段は、前記多回転の回転角度に基づき、前記ステアリングシャフトの操舵角を算出することを要旨とする。
上記構成によれば、第1,第2の検出ギヤの多回転の回転角度が算出され、ステアリングシャフトに連動して回転する第1のメインギヤの多回転の回転角度が求められる。その結果、ステアリングシャフトの多回転の回転角度として操舵角が検出できる
【0014】
請求項5に記載の発明は、請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記第1の検出ギヤの回転角度と前記第2の検出ギヤの回転角度との差動分により、前記ステアリングシャフトに働くトルクを算出するトルク算出手段を備えたことを要旨とする。
【0015】
上記構成によれば、回転角度検出装置を使用して、第1の検出ギヤの回転角度と第2の検出ギヤの回転角度との差動分により、ステアリングシャフトに働くトルク(操舵トルク)を算出しトルク検出を行うことができる。
【発明の効果】
【0016】
簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供できる。
【図面の簡単な説明】
【0017】
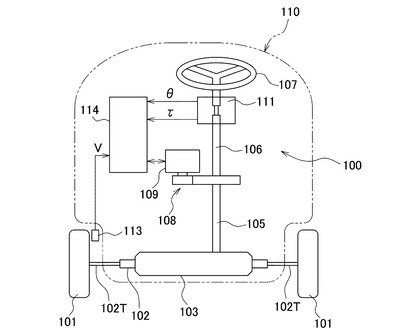
【図1】電動パワーステアリング装置の概念図。
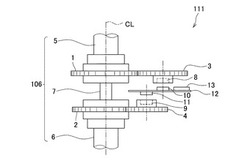
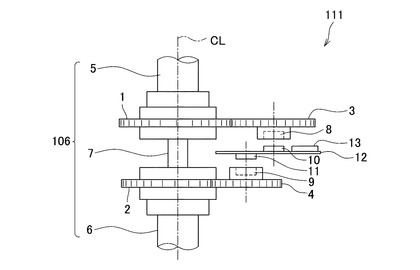
【図2】本実態の形態に係る回転角度検出装置の平面図。
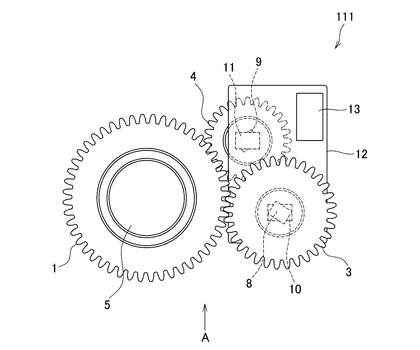
【図3】図2の矢印A方向から見た側面図。
【図4】第1及び第2の検出ギヤの多回転の回転角度演算の処理手順を示すフローチャート図。
【図5】第1及び第2の検出ギヤの角度検出値を示す図。
【図6】(a)第1及び第2の検出ギヤの回転角度の補正方法を示す図。(b)図5(a)の第1及び第2の検出ギヤの回転角度の補正後の差分を示す図。
【図7】多回転の回転角度及びトルクを算出するための演算テーブル。
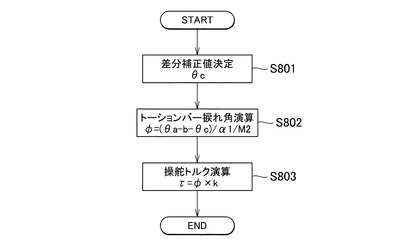
【図8】操舵トルク演算の処理手順を示すフローチャート図。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について、図に基づいて具体的に説明する。
図1は本発明の一実施形態をコラム型の電動パワーステアリング装置(EPS)に具体化した概念図である。
【0019】
図1に示すように、電動パワーステアリング装置100は、車両110に備えた1対の転舵輪101,101の間に差し渡された転舵輪間シャフト102と、その転舵輪間シャフト102の外側を覆ったシャフトケース103とを備えている。
【0020】
転舵輪間シャフト102の両端は、タイロッド102T,102Tを介して各転舵輪101,101に連結され、シャフトケース103は、車両110の本体に固定されている。また、転舵輪間シャフト102の中間部分にはラック(図示せず)が形成され、シャフトケース103の中間部を側方から貫通したピニオン(図示せず)がこのラックに噛合している。
【0021】
ピニオンの上端部にはインターミディエートシャフト105(以下、インタミシャフトという)が連結され、そのインタミシャフト105の上端部にはステアリングシャフト106が連結され、さらにそのステアリングシャフト106の上端部にはステアリングホイール107が連結されている。そして、インタミシャフト105とステアリングシャフト106との連結部分に、減速機構108を介してモータ109が連結されている。
【0022】
また、ステアリングシャフト106には、回転角度検出装置111が取り付けられ、ステアリングホイール107の操舵角θを検出するとともに、ステアリングシャフト106にかかる操舵トルクτを検出している。さらに、転舵輪101の近傍には、転舵輪101の回転に基づいて車速Vを検出するための車速センサ113が設けられている。
【0023】
そして、操舵制御装置(ECU)114が、回転角度検出装置111及び車速センサ113の検出信号に基づいた運転状況に応じてモータ109を駆動し、これにより運転者によるステアリングホイール107の操作をモータ109で補助して転舵輪101,101を転舵することができる。
【0024】
次に、図2は本発明の実施形態に係る回転角度検出装置の平面図、図3は図2の矢印A方向から見た側面図である。
【0025】
図2,3において、ステアリングシャフト106は、入力軸5,出力軸6及び入力軸5と出力軸6の間に設けられたトーションバー7から構成される。第1のメインギヤ1は入力軸5に嵌合して連結された多回転可能な歯車を持つ回転体であり、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体である。トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1の検出ギヤ3は第1のメインギヤ1の歯車に係合するように設けられた回転体であり、その中央部には磁石8がインサート成形等により配置されている。また、第2の検出ギヤ4は第2のメインギヤ2の歯車に係合するように設けられた回転体であり、その中央部には磁石9が配置されている。ホールIC(磁界検出素子)等の磁気式角度センサ10は磁石8に対向する位置に、磁気式角度センサ11は磁石9に対向する位置にそれぞれ配置され、磁石8,9の磁界方向の変化を検出する。磁気式角度センサ10,11は第1の検出ギヤ3と第2の検出ギヤ4との間に設けられた基板12上に配置されている。
【0026】
第1のメインギヤ1の歯車と第1の検出ギヤ3の歯車は連結されており、第1の検出ギヤ3は第1のメインギヤ1が回転するとそれぞれの歯車の歯数の比による速度で回転する。また、第2のメインギヤ2の歯車と第2の検出ギヤ4の歯車は連結されており、第2の検出ギヤ4は第2のメインギヤ2が回転するとそれぞれの歯車の歯数の比による速度で回転する。
【0027】
磁気式角度センサ10,11はそれぞれ第1,第2の検出ギヤ3,4の中心部に配置された磁石8,9の磁界方向の変化を検出し、それぞれのPWM信号が回転角度演算手段13へ出力されて、回転角度演算手段13内のCPU(図示せず)によって演算処理され、第1,第2の検出ギヤの回転角度θ1,θ2を算出することができる。
【0028】
次に、第1及び第2の検出ギヤ3,4の回転角度検出方法の実施形態について、図に基づいて具体的に説明する。
【0029】
まず、本実施形態の回転角度演算手段13による多回転の回転角度演算の処理手順について説明する。
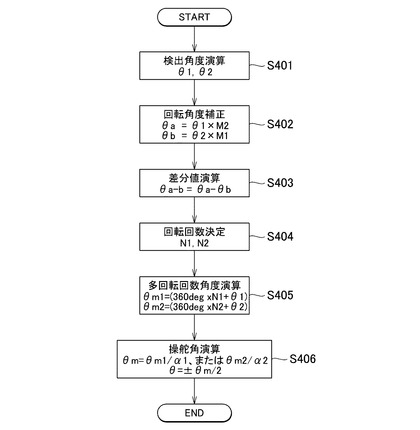
本実施形態おいて、回転角度演算手段13は、図4のフローチャートに示すステップ401〜ステップ406の各処理を実行する。
【0030】
回転角度演算手段13内のCPUは、上記磁気式角度センサ10、11からの各出力信号に基づいて、第1,第2の検出ギヤの回転角度θ1,θ2(検出角度範囲:0〜360deg)を算出する(ステップ401)。
【0031】
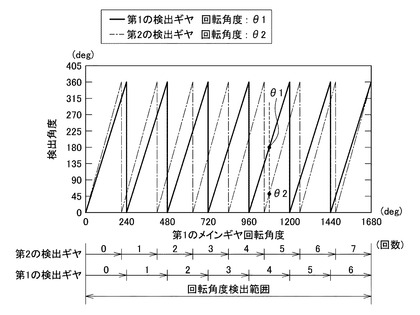
ここで、図5は第1,第2の検出ギヤ3,4の角度検出値を示す図であり、図5の横軸は第1,第2のメインギヤの多回転の回転角度θm、即ち入力軸5及び出力軸6の多回転の回転角度を示しており、縦軸はCPUの演算により求められた第1,第2の検出ギヤの回転角度θ1,θ2を示している。図5は第1,第2の検出ギヤの回転角度θ1,θ2の0degを回転角度検出範囲の0degに合わせて横軸方向を調整した角度検出値である。
【0032】
例えば、第1,第2のメインギヤ1,2の回転角度検出範囲を0〜1680degとし、第1,第2のメインギヤ1,2の歯数aを48、第1の検出ギヤ3の歯数bを32、第2の検出ギヤ4の歯数cを28に設定した場合、上記回転角度検出範囲での第1の検出ギヤの回転回数は7回転(0〜6)、第2の検出ギヤの回転回数は8回転(0〜7)となる。
【0033】
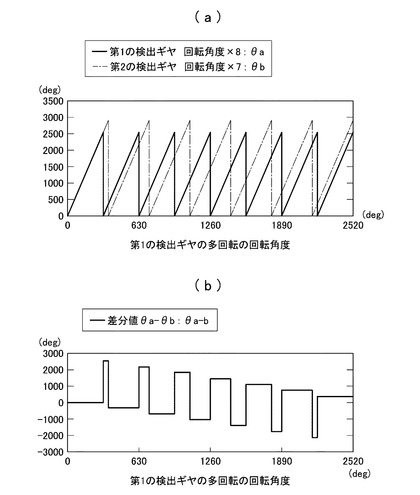
図6(a)は第1及び第2の検出ギヤの回転角度の補正方法を示す図、(b)は図6(a)の第1及び第2の検出ギヤの回転角度の補正後の差分を示す図である。ここで、図6(a),(b)の横軸は第1の検出ギヤの多回転の回転角度θm1に換算した検出範囲(0〜2520deg)で示している。(θm1=θm×α1、ただし、α1=a/b)
【0034】
ここで、図5で示した第1,第2のメインギヤ1,2の回転角度に対する第1の検出ギヤの回転角度θ1と第2の検出ギヤの回転角度θ2は、角度検出値の傾きが異なる。そこで、回転回数の算出を簡易に行うために、第1,第2の検出ギヤの回転角度θ1,θ2にそれぞれM2,M1の係数を乗じて補正する処理を行う。回転角度演算手段13は、第1の検出ギヤの回転角度θ1に係数M2を乗算し、第2の検出ギヤの回転角度θ2に係数M1を乗算し、それぞれの角度検出値の傾き(第1の検出ギヤ3の回転角度に対する、第1の検出ギヤの傾き調整値θa,第2の検出ギヤの傾き調整値θb)が合わせられる。(図6(a)参照 θa=θ1×M2、θb=θ2×M1、ただし、M1=7,M2=8、ステップ402)
【0035】
次に、上記第1,第2の検出ギヤの傾き調整値θa,θbの差分値θa-bを求める。(図6(b)参照 θa-b=θa−θb、ステップ403)
【0036】
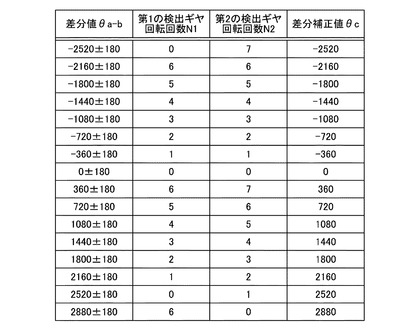
その結果、図6(b)に示すような判別が容易な差分値θa-bが得られ、多回転の回転角度及びトルクを求めるために作成された演算テーブル図7を参照して、差分値θa-bから第1,第2の検出ギヤの回転回数N1,N2をそれぞれ決定する。(ステップ404)
【0037】
ここで、第1の検出ギヤ3の多回転の回転角度検出範囲(0〜2520deg)において、第1,第2の検出ギヤの回転角度θ1,θ2の値から、第1,第2の検出ギヤの回転回数N1,N2が決定される。(例えば、図5でθ1が180deg、θ2が51.4degの場合、θa-bは1080.2degとなり、N1が4回転、N2が5回転の回転回数がそれぞれ取得される)
【0038】
次に、計算式により第1,第2の検出ギヤの多回転の回転角度θm1,θm2を算出する。(θm1=360deg×N1+θ1、θm2=360deg×N2+θ2、ステップ405)
【0039】
続いて、第1のメインギヤの多回転の回転角度θmを算出する。(θm=θm1/α1またはθm2/α2、ただし、α2=a/c、ステップ406)
【0040】
上記演算で求められた第1のメインギヤの多回転の回転角度θmは0〜1680degとなるため、−840〜840degに換算して操舵角θ(ステアリングシャフト106の多回転の回転角度)が決定される。(θ=±θm/2)
【0041】
次に、トルクの算出方法の実施形態について、図に基づいて具体的に説明する。
本実施形態おいて、回転角度演算手段13は、図8のフローチャートに示すステップ801〜ステップ803の各処理を実行する。
【0042】
図4ステップ403の計算式から求めた第1,第2の検出ギヤの傾き調整値の差分値θa-bに基づいて、同様に演算テーブル図7を参照して差分補正値θcを決定する。(ステップ801)
【0043】
次に、差分値θa-bから差分補正値θcを減算して偏差を求め、計算式によりトーションバー7の捩れ角φを算出する。(φ=(θa-b−θc)/α1/M2、ステップ802)
【0044】
そして、トーションバー7の捩れ角φにトーションバー7のバネ定数kを乗じて、トーションバー7にかかる操舵トルクτを算出することができる。(τ=φ×k、ステップ803)
【0045】
このように、本実施形態の回転角度検出装置によれば、多回転の回転数を検出するために別の手段を設けなくても、多回転で回転角度を検出することができる。ステアリングシャフト106の入力軸5と出力軸6に装着された第1,第2のメインギヤ1,2の回転に応じてそれぞれ回転する、第1,第2の検出ギヤの回転角度θ1,θ2が算出される。さらに、回転回数の算出を簡素化するために回転角度差の補正演算が行われ、演算テーブル図7から回転回数N1,N2が取得される。そして、第1,第2の検出ギヤの多回転の回転角度θm1,θm2が算出され、ステアリングシャフト106に連動して回転する第1のメインギヤの多回転の回転角度θmが求められる。その結果、ステアリングシャフト106の多回転の回転角度として操舵角θが検出できる。
【0046】
さらに、本実施形態によれば、ステアリングホイール107に操舵力が働くと、ステアリングシャフト106に装着された2つの第1,第2の検出ギヤ3,4は、入力軸5と出力軸6間に設けられたトーションバー7を介して回転角度の差を伴って回転する。この回転角度の差をトーションバー7の捩れ角φに換算して、トーションバー7のバネ定数kを乗ずることにより操舵トルクτとして検出できる。
【0047】
本発明の回転角度検出装置は、簡単な構成で多回転の回転角度及びトルク検出を行うことができるとともに、搭載スペース及びコストの低減ができるため、車両のパワーステアリング等で使用される多回転の回転角度及びトルク検出への適用に有用である。
【0048】
なお、上記実施形態は以下のように変更してもよい。
上記実施形態では、回転角度演算手段を回転角度検出装置内に設けたが、外部の例えばEPSのECUに設けてもよい。
また、本実施形態によれば、メインギヤ,検出ギヤ及び検出手段を一体形構造とし、小型化したのでステアリングシャフトに装備できたが、例えばステアリングホイールのようなその他の場所に装着してもよい。
上記実施形態では、メインギヤ、検出ギヤを具体的な歯数を用いて説明したが、他の歯数の組み合わせを用いてもよい。
【符号の説明】
【0049】
1,2:第1,第2のメインギヤ、3,4:第1,第2の検出ギヤ、5:入力軸、
6:出力軸、7:トーションバー、8,9:磁石、10,11:磁気式角度センサ、
12:基板、13:回転角度演算手段、
100:電動パワーステアリング装置、106:ステアリングシャフト、
107:ステアリングホイール、111:回転角度検出装置、114:操舵制御装置、
θ:操舵角、τ:操舵トルク、V:車速、
θ1,θ2:第1,第2の検出ギヤの検出回転角度、
θa,θb:差分値を算出するための第1,第2の検出ギヤの傾き調整値、
θa-b:差分値、θc:差分補正値、M1,M2:差分値を算出するための補正係数
a:第1,第2のメインギヤの歯数、b,c:第1,第2の検出ギヤの歯数、
α1,α2:第1,第2の検出ギヤのギヤ比、
N1,N2:第1,第2の検出ギヤの回転回数、
θm1,θm2:第1,第2の検出ギヤの多回転の回転角度、
θm:メインギヤ1,2の多回転の回転角度、
φ:トーションバーの捩れ角、k:バネ定数
【技術分野】
【0001】
本発明は、車両のパワーステアリング等に用いられる回転角度検出装置に関するものであり、特にステアリングの回転角度とトルクの検出を同時に可能とする回転角度検出装置に関するものである。
【背景技術】
【0002】
従来、回転角度及びトルクを同時に検出する方式として、磁気式角度センサと着磁した回転体を使用した一体形構造による方式が知られている。ステアリングに操舵力が働くと、ステアリングシャフトに装着された2つの回転体間で回転差が生じ、これをトルクとして検出できる。また、上記回転体の一方は、ステアリングの回転に応じて同様に回転するので、同時に回転角度も検出できる。(例えば、特許文献1参照)
【0003】
しかしながら、このように構成された回転角度検出装置においては、1回転の相対回転角の検出しかできず、多回転の回転角度の検出ができないという課題がある。このため、ステアリングシャフトの入力軸と出力軸にそれぞれ外周面に交互に極性の異なる磁極が着磁してある第1及び第2の回転体を連結し、中心部に磁石を配置した第3の回転体を入力軸側の回転体に噛合させ、それぞれの回転体の回転角度を検出する検出手段を設けて多回転の回転角度およびトルク検出を行っている。(例えば、特許文献2参照)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63−317702号公報
【特許文献2】特開2006−220529号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように多回転の回転角度を求める場合、回転数を検出する手段が必要となる。また、この回転数を検出する手段の搭載スペース及びコストが必要という問題がある。
このため、回転角度の検出手段を増やすことなく、簡単な構成で多回転の回転角度及びトルクを検出できる回転角度検出装置を得ることが課題となっている。
【0006】
本発明は、上記課題を解決するためになされたものであり、その目的は、簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に記載の発明は、ステアリングシャフトの入力軸と出力軸の間にトーションバーを設け、前記ステアリングシャフトの入力軸に連動して回転する第1のメインギヤと、前記第1のメインギヤに連動して回転する第1の検出ギヤと、
前記第1の検出ギヤに設けた第1の被検出部材と、前記ステアリングシャフトの出力軸に連動して回転する第2のメインギヤと、前記第2のメインギヤに連動して回転する第2の検出ギヤと、前記第2の検出ギヤに設けた第2の被検出部材と、前記第1の検出ギヤと前記第2の検出ギヤとの間に設けられ、前記第1の被検出部材と前記第2の被検出部材にそれぞれ対向し、前記第1の検出ギヤ及び前記第2の検出ギヤの回転をそれぞれ検出する第1の検出手段及び第2の検出手段と、前記第1の検出手段及び前記第2の検出手段から出力されるそれぞれの信号から前記ステアリングシャフトの多回転の回転角度を算出する回転角度演算手段とを備えた回転角度検出装置であることを要旨とする。
【0008】
上記構成によれば、ステアリングシャフトの入力軸及び出力軸に連結した第1,第2のメインギヤと第1,第2の検出ギヤ及び第1,第2の検出手段によりそれぞれ回転を検出し、回転角度演算手段により回転角度を算出し、これらの回転角度より多回転の回転角度を検出できる。
【0009】
請求項2に記載の発明は、前記回転角度演算手段は、前記第1の検出手段と前記第2の検出手段に基づいて前記第1の検出ギヤと前記第2の検出ギヤの回転角度を算出する検出角度演算手段と、前記第1の検出ギヤ及び前記第2の検出ギヤの回転回数を決定する回転回数決定手段とに基づき、前記多回転の回転角度を算出することを要旨とする。
【0010】
上記構成によれば、第1,第2の検出ギヤの回転角度、回転回数及び多回転の回転角度を第1,第2の検出手段から出力される信号からそれぞれ演算処理により求め、ステアリングシャフトの多回転の回転角度を検出することができる。
【0011】
請求項3に記載の発明は、前記第1のメインギヤと前記第2のメインギヤは歯数が同一であり、前記第1の検出ギヤと前記第2の検出ギヤは歯数が異なるとともに、前記第1の検出ギヤ及び前記第2の検出ギヤの歯数は、前記第1のメインギヤ及び前記第2のメインギヤの歯数とは異なることを要旨とする。
【0012】
上記構成によれば、入力軸と出力軸に異なったギヤ比の検出ギヤを設けることにより、ステアリングの操舵範囲内(いわゆるロックtoロック)での回転数を検出することができる。
【0013】
請求項4に記載の発明は、請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記回転角度演算手段は、前記多回転の回転角度に基づき、前記ステアリングシャフトの操舵角を算出することを要旨とする。
上記構成によれば、第1,第2の検出ギヤの多回転の回転角度が算出され、ステアリングシャフトに連動して回転する第1のメインギヤの多回転の回転角度が求められる。その結果、ステアリングシャフトの多回転の回転角度として操舵角が検出できる
【0014】
請求項5に記載の発明は、請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記第1の検出ギヤの回転角度と前記第2の検出ギヤの回転角度との差動分により、前記ステアリングシャフトに働くトルクを算出するトルク算出手段を備えたことを要旨とする。
【0015】
上記構成によれば、回転角度検出装置を使用して、第1の検出ギヤの回転角度と第2の検出ギヤの回転角度との差動分により、ステアリングシャフトに働くトルク(操舵トルク)を算出しトルク検出を行うことができる。
【発明の効果】
【0016】
簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供できる。
【図面の簡単な説明】
【0017】
【図1】電動パワーステアリング装置の概念図。
【図2】本実態の形態に係る回転角度検出装置の平面図。
【図3】図2の矢印A方向から見た側面図。
【図4】第1及び第2の検出ギヤの多回転の回転角度演算の処理手順を示すフローチャート図。
【図5】第1及び第2の検出ギヤの角度検出値を示す図。
【図6】(a)第1及び第2の検出ギヤの回転角度の補正方法を示す図。(b)図5(a)の第1及び第2の検出ギヤの回転角度の補正後の差分を示す図。
【図7】多回転の回転角度及びトルクを算出するための演算テーブル。
【図8】操舵トルク演算の処理手順を示すフローチャート図。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について、図に基づいて具体的に説明する。
図1は本発明の一実施形態をコラム型の電動パワーステアリング装置(EPS)に具体化した概念図である。
【0019】
図1に示すように、電動パワーステアリング装置100は、車両110に備えた1対の転舵輪101,101の間に差し渡された転舵輪間シャフト102と、その転舵輪間シャフト102の外側を覆ったシャフトケース103とを備えている。
【0020】
転舵輪間シャフト102の両端は、タイロッド102T,102Tを介して各転舵輪101,101に連結され、シャフトケース103は、車両110の本体に固定されている。また、転舵輪間シャフト102の中間部分にはラック(図示せず)が形成され、シャフトケース103の中間部を側方から貫通したピニオン(図示せず)がこのラックに噛合している。
【0021】
ピニオンの上端部にはインターミディエートシャフト105(以下、インタミシャフトという)が連結され、そのインタミシャフト105の上端部にはステアリングシャフト106が連結され、さらにそのステアリングシャフト106の上端部にはステアリングホイール107が連結されている。そして、インタミシャフト105とステアリングシャフト106との連結部分に、減速機構108を介してモータ109が連結されている。
【0022】
また、ステアリングシャフト106には、回転角度検出装置111が取り付けられ、ステアリングホイール107の操舵角θを検出するとともに、ステアリングシャフト106にかかる操舵トルクτを検出している。さらに、転舵輪101の近傍には、転舵輪101の回転に基づいて車速Vを検出するための車速センサ113が設けられている。
【0023】
そして、操舵制御装置(ECU)114が、回転角度検出装置111及び車速センサ113の検出信号に基づいた運転状況に応じてモータ109を駆動し、これにより運転者によるステアリングホイール107の操作をモータ109で補助して転舵輪101,101を転舵することができる。
【0024】
次に、図2は本発明の実施形態に係る回転角度検出装置の平面図、図3は図2の矢印A方向から見た側面図である。
【0025】
図2,3において、ステアリングシャフト106は、入力軸5,出力軸6及び入力軸5と出力軸6の間に設けられたトーションバー7から構成される。第1のメインギヤ1は入力軸5に嵌合して連結された多回転可能な歯車を持つ回転体であり、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体である。トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1の検出ギヤ3は第1のメインギヤ1の歯車に係合するように設けられた回転体であり、その中央部には磁石8がインサート成形等により配置されている。また、第2の検出ギヤ4は第2のメインギヤ2の歯車に係合するように設けられた回転体であり、その中央部には磁石9が配置されている。ホールIC(磁界検出素子)等の磁気式角度センサ10は磁石8に対向する位置に、磁気式角度センサ11は磁石9に対向する位置にそれぞれ配置され、磁石8,9の磁界方向の変化を検出する。磁気式角度センサ10,11は第1の検出ギヤ3と第2の検出ギヤ4との間に設けられた基板12上に配置されている。
【0026】
第1のメインギヤ1の歯車と第1の検出ギヤ3の歯車は連結されており、第1の検出ギヤ3は第1のメインギヤ1が回転するとそれぞれの歯車の歯数の比による速度で回転する。また、第2のメインギヤ2の歯車と第2の検出ギヤ4の歯車は連結されており、第2の検出ギヤ4は第2のメインギヤ2が回転するとそれぞれの歯車の歯数の比による速度で回転する。
【0027】
磁気式角度センサ10,11はそれぞれ第1,第2の検出ギヤ3,4の中心部に配置された磁石8,9の磁界方向の変化を検出し、それぞれのPWM信号が回転角度演算手段13へ出力されて、回転角度演算手段13内のCPU(図示せず)によって演算処理され、第1,第2の検出ギヤの回転角度θ1,θ2を算出することができる。
【0028】
次に、第1及び第2の検出ギヤ3,4の回転角度検出方法の実施形態について、図に基づいて具体的に説明する。
【0029】
まず、本実施形態の回転角度演算手段13による多回転の回転角度演算の処理手順について説明する。
本実施形態おいて、回転角度演算手段13は、図4のフローチャートに示すステップ401〜ステップ406の各処理を実行する。
【0030】
回転角度演算手段13内のCPUは、上記磁気式角度センサ10、11からの各出力信号に基づいて、第1,第2の検出ギヤの回転角度θ1,θ2(検出角度範囲:0〜360deg)を算出する(ステップ401)。
【0031】
ここで、図5は第1,第2の検出ギヤ3,4の角度検出値を示す図であり、図5の横軸は第1,第2のメインギヤの多回転の回転角度θm、即ち入力軸5及び出力軸6の多回転の回転角度を示しており、縦軸はCPUの演算により求められた第1,第2の検出ギヤの回転角度θ1,θ2を示している。図5は第1,第2の検出ギヤの回転角度θ1,θ2の0degを回転角度検出範囲の0degに合わせて横軸方向を調整した角度検出値である。
【0032】
例えば、第1,第2のメインギヤ1,2の回転角度検出範囲を0〜1680degとし、第1,第2のメインギヤ1,2の歯数aを48、第1の検出ギヤ3の歯数bを32、第2の検出ギヤ4の歯数cを28に設定した場合、上記回転角度検出範囲での第1の検出ギヤの回転回数は7回転(0〜6)、第2の検出ギヤの回転回数は8回転(0〜7)となる。
【0033】
図6(a)は第1及び第2の検出ギヤの回転角度の補正方法を示す図、(b)は図6(a)の第1及び第2の検出ギヤの回転角度の補正後の差分を示す図である。ここで、図6(a),(b)の横軸は第1の検出ギヤの多回転の回転角度θm1に換算した検出範囲(0〜2520deg)で示している。(θm1=θm×α1、ただし、α1=a/b)
【0034】
ここで、図5で示した第1,第2のメインギヤ1,2の回転角度に対する第1の検出ギヤの回転角度θ1と第2の検出ギヤの回転角度θ2は、角度検出値の傾きが異なる。そこで、回転回数の算出を簡易に行うために、第1,第2の検出ギヤの回転角度θ1,θ2にそれぞれM2,M1の係数を乗じて補正する処理を行う。回転角度演算手段13は、第1の検出ギヤの回転角度θ1に係数M2を乗算し、第2の検出ギヤの回転角度θ2に係数M1を乗算し、それぞれの角度検出値の傾き(第1の検出ギヤ3の回転角度に対する、第1の検出ギヤの傾き調整値θa,第2の検出ギヤの傾き調整値θb)が合わせられる。(図6(a)参照 θa=θ1×M2、θb=θ2×M1、ただし、M1=7,M2=8、ステップ402)
【0035】
次に、上記第1,第2の検出ギヤの傾き調整値θa,θbの差分値θa-bを求める。(図6(b)参照 θa-b=θa−θb、ステップ403)
【0036】
その結果、図6(b)に示すような判別が容易な差分値θa-bが得られ、多回転の回転角度及びトルクを求めるために作成された演算テーブル図7を参照して、差分値θa-bから第1,第2の検出ギヤの回転回数N1,N2をそれぞれ決定する。(ステップ404)
【0037】
ここで、第1の検出ギヤ3の多回転の回転角度検出範囲(0〜2520deg)において、第1,第2の検出ギヤの回転角度θ1,θ2の値から、第1,第2の検出ギヤの回転回数N1,N2が決定される。(例えば、図5でθ1が180deg、θ2が51.4degの場合、θa-bは1080.2degとなり、N1が4回転、N2が5回転の回転回数がそれぞれ取得される)
【0038】
次に、計算式により第1,第2の検出ギヤの多回転の回転角度θm1,θm2を算出する。(θm1=360deg×N1+θ1、θm2=360deg×N2+θ2、ステップ405)
【0039】
続いて、第1のメインギヤの多回転の回転角度θmを算出する。(θm=θm1/α1またはθm2/α2、ただし、α2=a/c、ステップ406)
【0040】
上記演算で求められた第1のメインギヤの多回転の回転角度θmは0〜1680degとなるため、−840〜840degに換算して操舵角θ(ステアリングシャフト106の多回転の回転角度)が決定される。(θ=±θm/2)
【0041】
次に、トルクの算出方法の実施形態について、図に基づいて具体的に説明する。
本実施形態おいて、回転角度演算手段13は、図8のフローチャートに示すステップ801〜ステップ803の各処理を実行する。
【0042】
図4ステップ403の計算式から求めた第1,第2の検出ギヤの傾き調整値の差分値θa-bに基づいて、同様に演算テーブル図7を参照して差分補正値θcを決定する。(ステップ801)
【0043】
次に、差分値θa-bから差分補正値θcを減算して偏差を求め、計算式によりトーションバー7の捩れ角φを算出する。(φ=(θa-b−θc)/α1/M2、ステップ802)
【0044】
そして、トーションバー7の捩れ角φにトーションバー7のバネ定数kを乗じて、トーションバー7にかかる操舵トルクτを算出することができる。(τ=φ×k、ステップ803)
【0045】
このように、本実施形態の回転角度検出装置によれば、多回転の回転数を検出するために別の手段を設けなくても、多回転で回転角度を検出することができる。ステアリングシャフト106の入力軸5と出力軸6に装着された第1,第2のメインギヤ1,2の回転に応じてそれぞれ回転する、第1,第2の検出ギヤの回転角度θ1,θ2が算出される。さらに、回転回数の算出を簡素化するために回転角度差の補正演算が行われ、演算テーブル図7から回転回数N1,N2が取得される。そして、第1,第2の検出ギヤの多回転の回転角度θm1,θm2が算出され、ステアリングシャフト106に連動して回転する第1のメインギヤの多回転の回転角度θmが求められる。その結果、ステアリングシャフト106の多回転の回転角度として操舵角θが検出できる。
【0046】
さらに、本実施形態によれば、ステアリングホイール107に操舵力が働くと、ステアリングシャフト106に装着された2つの第1,第2の検出ギヤ3,4は、入力軸5と出力軸6間に設けられたトーションバー7を介して回転角度の差を伴って回転する。この回転角度の差をトーションバー7の捩れ角φに換算して、トーションバー7のバネ定数kを乗ずることにより操舵トルクτとして検出できる。
【0047】
本発明の回転角度検出装置は、簡単な構成で多回転の回転角度及びトルク検出を行うことができるとともに、搭載スペース及びコストの低減ができるため、車両のパワーステアリング等で使用される多回転の回転角度及びトルク検出への適用に有用である。
【0048】
なお、上記実施形態は以下のように変更してもよい。
上記実施形態では、回転角度演算手段を回転角度検出装置内に設けたが、外部の例えばEPSのECUに設けてもよい。
また、本実施形態によれば、メインギヤ,検出ギヤ及び検出手段を一体形構造とし、小型化したのでステアリングシャフトに装備できたが、例えばステアリングホイールのようなその他の場所に装着してもよい。
上記実施形態では、メインギヤ、検出ギヤを具体的な歯数を用いて説明したが、他の歯数の組み合わせを用いてもよい。
【符号の説明】
【0049】
1,2:第1,第2のメインギヤ、3,4:第1,第2の検出ギヤ、5:入力軸、
6:出力軸、7:トーションバー、8,9:磁石、10,11:磁気式角度センサ、
12:基板、13:回転角度演算手段、
100:電動パワーステアリング装置、106:ステアリングシャフト、
107:ステアリングホイール、111:回転角度検出装置、114:操舵制御装置、
θ:操舵角、τ:操舵トルク、V:車速、
θ1,θ2:第1,第2の検出ギヤの検出回転角度、
θa,θb:差分値を算出するための第1,第2の検出ギヤの傾き調整値、
θa-b:差分値、θc:差分補正値、M1,M2:差分値を算出するための補正係数
a:第1,第2のメインギヤの歯数、b,c:第1,第2の検出ギヤの歯数、
α1,α2:第1,第2の検出ギヤのギヤ比、
N1,N2:第1,第2の検出ギヤの回転回数、
θm1,θm2:第1,第2の検出ギヤの多回転の回転角度、
θm:メインギヤ1,2の多回転の回転角度、
φ:トーションバーの捩れ角、k:バネ定数
【特許請求の範囲】
【請求項1】
ステアリングシャフトの入力軸と出力軸の間にトーションバーを設け、
前記ステアリングシャフトの入力軸に連動して回転する第1のメインギヤと、
前記第1のメインギヤに連動して回転する第1の検出ギヤと、
前記第1の検出ギヤに設けた第1の被検出部材と、
前記ステアリングシャフトの出力軸に連動して回転する第2のメインギヤと、
前記第2のメインギヤに連動して回転する第2の検出ギヤと、
前記第2の検出ギヤに設けた第2の被検出部材と、
前記第1の検出ギヤと前記第2の検出ギヤとの間に設けられ、前記第1の被検出部材と前記第2の被検出部材にそれぞれ対向し、前記第1の検出ギヤ及び前記第2の検出ギヤの回転をそれぞれ検出する第1の検出手段及び第2の検出手段と、
前記第1の検出手段及び前記第2の検出手段から出力されるそれぞれの信号から前記ステアリングシャフトの多回転の回転角度を算出する回転角度演算手段と、を備えたことを特徴とする回転角度検出装置。
【請求項2】
請求項1において、前記回転角度演算手段は、前記第1の検出手段と前記第2の検出手段に基づいて前記第1の検出ギヤと前記第2の検出ギヤの回転角度を算出する検出角度演算手段と、
前記第1の検出ギヤ及び前記第2の検出ギヤの回転回数を決定する回転回数決定手段と、に基づき、前記多回転の回転角度を算出することを特徴とする回転角度検出装置。
【請求項3】
請求項1において、前記第1のメインギヤと前記第2のメインギヤは歯数が同一であり、前記第1の検出ギヤと前記第2の検出ギヤは歯数が異なるとともに、前記第1の検出ギヤ及び前記第2の検出ギヤの歯数は、前記第1のメインギヤ及び前記第2のメインギヤの歯数とは異なることを特徴とする回転角度検出装置。
【請求項4】
請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記回転角度演算手段は、前記多回転の回転角度に基づき、前記ステアリングシャフトの操舵角を算出することを特徴とする回転角度検出装置。
【請求項5】
請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記第1の検出ギヤの回転角度と前記第2の検出ギヤの回転角度との差動分により、前記ステアリングシャフトに働くトルクを算出するトルク算出手段を備えたことを特徴とする回転角度検出装置。
【請求項1】
ステアリングシャフトの入力軸と出力軸の間にトーションバーを設け、
前記ステアリングシャフトの入力軸に連動して回転する第1のメインギヤと、
前記第1のメインギヤに連動して回転する第1の検出ギヤと、
前記第1の検出ギヤに設けた第1の被検出部材と、
前記ステアリングシャフトの出力軸に連動して回転する第2のメインギヤと、
前記第2のメインギヤに連動して回転する第2の検出ギヤと、
前記第2の検出ギヤに設けた第2の被検出部材と、
前記第1の検出ギヤと前記第2の検出ギヤとの間に設けられ、前記第1の被検出部材と前記第2の被検出部材にそれぞれ対向し、前記第1の検出ギヤ及び前記第2の検出ギヤの回転をそれぞれ検出する第1の検出手段及び第2の検出手段と、
前記第1の検出手段及び前記第2の検出手段から出力されるそれぞれの信号から前記ステアリングシャフトの多回転の回転角度を算出する回転角度演算手段と、を備えたことを特徴とする回転角度検出装置。
【請求項2】
請求項1において、前記回転角度演算手段は、前記第1の検出手段と前記第2の検出手段に基づいて前記第1の検出ギヤと前記第2の検出ギヤの回転角度を算出する検出角度演算手段と、
前記第1の検出ギヤ及び前記第2の検出ギヤの回転回数を決定する回転回数決定手段と、に基づき、前記多回転の回転角度を算出することを特徴とする回転角度検出装置。
【請求項3】
請求項1において、前記第1のメインギヤと前記第2のメインギヤは歯数が同一であり、前記第1の検出ギヤと前記第2の検出ギヤは歯数が異なるとともに、前記第1の検出ギヤ及び前記第2の検出ギヤの歯数は、前記第1のメインギヤ及び前記第2のメインギヤの歯数とは異なることを特徴とする回転角度検出装置。
【請求項4】
請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記回転角度演算手段は、前記多回転の回転角度に基づき、前記ステアリングシャフトの操舵角を算出することを特徴とする回転角度検出装置。
【請求項5】
請求項1〜請求項3の何れかに記載の回転角度検出装置において、前記第1の検出ギヤの回転角度と前記第2の検出ギヤの回転角度との差動分により、前記ステアリングシャフトに働くトルクを算出するトルク算出手段を備えたことを特徴とする回転角度検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−141276(P2012−141276A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2011−66926(P2011−66926)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
[ Back to top ]