
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転部材の回転角度を検出する回転角検出装置、および、これを用いた電動パワーステアリング装置に関する。
【背景技術】
【0002】
従来、回転部材の回転角度を検出する回転角検出装置が知られている。回転角検出装置では、センサ素子から出力される出力信号に基づいて回転角度を算出している。ところで、例えば出力信号がcos信号およびsin信号である場合、回転角度を高精度に検出するためには、センサ素子から出力されるcos信号とsin信号との位相差が90度であることが要求される。そのためには、cos信号を出力するセンサ素子の磁化方向と、sin信号を出力するセンサ素子の磁化方向とが、互いに90度ずれるように実装する必要がある。しかしながら、磁化方向は目視によって確認することができないため、磁化方向が正確に90度ずれるようにセンサ素子を実装することは困難である。そこで、特許文献1では、位相補正前回転角度θから三角関数の近似式を減算することにより、センサ素子の実装ずれを補正し、高精度に回転角度δを算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4194484号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、位相を補正するための三角関数の近似式を算出する際に、外部から正しい回転角度δを測定する必要がある。したがって、特許文献1では、回転角度δを測定するための外部装置が必須であった。また特許文献1では、回転角度の算出に用いる信号数が増えた場合、信号数の組み合わせの数だけ補正に用いる三角関数を記憶する必要があり、メモリ部の容量の増加が懸念される。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の回転角検出装置は、ブリッジ回路部と、出力信号取得手段と、補正前回転角度算出手段と、位相補正値算出手段と、記憶部と、補正手段と、を備える。回路部は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子により構成される複数のセンサ素子組を有する。出力信号取得手段は、複数のセンサ素子組から出力される出力信号をセンサ素子組毎に取得する。すなわち、出力信号取得手段は、複数の出力信号を取得する。ここで、出力信号取得手段により取得される出力信号は、位相の異なる複数の信号を含んでいる。補正前回転角度算出手段は、出力信号取得手段により取得された出力信号に基づき、被検出部の補正前回転角度を算出する。位相補正値算出手段は、出力信号取得手段により取得された出力信号に基づき、出力信号間の位相ずれを補正するための位相補正値を算出する。記憶部は、位相補正値算出手段により算出された位相補正値を記憶する。補正手段は、記憶部に記憶された位相補正値を取得し、取得された位相補正値に基づき、補正前回転角度算出手段により算出された補正前回転角度を補正する。
【0007】
また、位相補正値は、出力信号の組合せ毎に記憶し、出力信号の一部に異常が生じた場合には、異常が生じていない出力信号の組合せに対応した位相補正値を取得し、取得された位相補正値に基づき、補正前回転角度を補正する。
【0008】
これにより、位相補正値に基づいて補正前回転角度を補正するので、高精度に被検出部の回転角度を算出することができる。また、出力信号取得手段により取得された出力信号に基づいて位相ずれを補正するための位相補正値を算出するので、外部からの正しい回転角度の測定が不要である。
【0009】
また、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値に基づき、高精度に被検出部の回転角度を算出することができる。
【0010】
なお、「位相の異なる信号」とは、出力信号間における位相差が所定の値、例えば90度、である信号のことをいう。また、「位相ずれ」とは、例えばセンサ素子の実装ずれ等に起因する出力信号間の位相差の上記所定の値からの「ずれ」のことをいう。
【0011】
請求項2に記載の発明では、出力信号取得手段により取得される出力信号は、cos信号およびsin信号を含む。cos信号とsin信号とは、位相が異なっており、すなわち「位相の異なる信号」に対応している。
【0012】
請求項3に記載の発明では、出力信号取得手段により取得される出力信号は、4以上である。これにより、出力信号の一部に異常が生じた場合でも、被検出部の回転角度の検出を継続することができる。
【0013】
請求項4に記載の発明では、出力信号取得手段により取得される出力信号は、+cos信号、−cos信号、+sin信号、および、−sin信号を含む。なお、+cos信号および−cos信号が「cos信号」に対応し、+sin信号および−sin信号が「sin信号」に対応する。これにより、出力信号の一部に異常が生じた場合でも、+cos信号または−cos信号のいずれか一方、および、+sin信号または−sin信号のいずれか一方が正常であれば、被検出部の回転角度の検出を継続することができる。
【0014】
請求項5に記載の発明では、補正前回転角度算出手段は、+cos信号、−cos信号、+sin信号、および、−sin信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+cos信号、−cos信号、+sin信号、および、−sin信号に基づいて位相補正値を算出する。例えば+cos信号から−cos信号を減算し、+sin信号から−sin信号を減算し、センサ誤差等を消去したcos信号およびsin信号に基づいて補正前回転角度および位相補正値を算出することができるので、より高精度に被検出部の回転角度を算出することができる。
【0015】
請求項6に記載の発明では、補正前回転角度算出手段は、+cos信号または−cos信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+cos信号または−cos信号に基づいて位相補正値を算出する。これにより、+cos信号または−cos信号に異常が生じた場合でも、異常が生じていない+cos信号または−cos信号に基づいて補正前回転角度を算出し、異常が生じていない+cos信号または−cos信号に基づいて算出された位相補正値に基づいて補正前回転角度を補正することにより、高精度に被検出部の回転角度を算出することができる。
【0016】
請求項7に記載の発明では、補正前回転角度算出手段は、+sin信号または−sin信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+sin信号または−sin信号に基づいて位相補正値を算出する。これにより、+sin信号または−sin信号に異常が生じた場合でも、異常が生じていない+sin信号または−sin信号に基づいて補正前回転角度を算出し、異常が生じていない+sin信号または−sin信号に基づいて算出された位相補正値に基づいて補正前回転角度を補正することにより、高精度に被検出部の回転角度を算出することができる。
【0017】
請求項8に記載の発明は、請求項1〜7のいずれか一項に記載された回転角検出装置を用いた電動パワーステアリング装置である。これにより、電動パワーステアリング装置のモータ回転角を高精度に算出することができ、電動パワーステアリング装置の駆動をより精度よく制御することができる。また例えば請求項3〜7の構成を採用すれば、出力信号の一部に異常が生じた場合でも、出力信号間の位相ずれを補正して高精度に回転角度を算出し、電動パワーステアリング装置の駆動を継続することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態によるステアリングシステムの構成を示す模式図である。
【図2】本発明の一実施形態によるモータの構成を示す模式的な断面図である。
【図3】本発明の一実施形態による回転角検出装置の回路構成を示す回路図である。
【図4】本発明の一実施形態によるcos信号およびsin信号を説明する説明図である。
【図5】本発明の一実施形態による位相補正値算出処理を説明するフローチャートである。
【図6】本発明の一実施形態による回転角検出処理を説明するフローチャートである。
【図7】本発明の一実施形態による回転角検出処理を説明するフローチャートである。
【図8】本発明の一実施形態による補正前回転角度θnの算出に係る角度範囲の分割を説明する説明図である。
【図9】本発明の一実施形態による角度νnに基づいて補正前回転角度θnを算出する算出方法を説明する説明図である。
【発明を実施するための形態】
【0019】
以下、本発明による回転角検出装置を図面に基づいて説明する。
【0020】
(一実施形態)
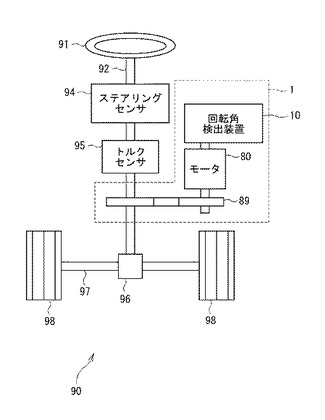
図1に示すように、本発明の一実施形態による回転角検出装置10は、車両のステアリング操作をアシストするための電動パワーステアリング装置1(以下、適宜「EPS」という。)に適用される。
【0021】
図1は、電動パワーステアリング装置1を備えたステアリングシステム90の全体構成を示す図である。ステアリングホイール91に接続されたステアリングシャフト92には、ステアリングセンサ94およびトルクセンサ95が設けられている。ステアリングセンサ94は、ステアリングシャフト92の回転角を検出する。トルクセンサ95は、ステアリングホイール91に加えられた操舵トルクを検出する。ステアリングシャフト92の先端は、ギア96を介してラック軸97に連結されている。ラック軸97の両端には、タイロッド等を介して一対のタイヤ(ホイール)98がそれぞれ連結されている。ステアリングシャフト92の回転運動は、ギア96によってラック軸97の直線運動に変換され、ラック軸97の直線運動変位に応じた角度分、左右のタイヤ98が転舵される。
【0022】
電動パワーステアリング装置1は、補助操舵トルクを発生するモータ80、モータ80の回転角度を検出する回転角検出装置10、及び、モータ80の回転を減速してステアリングシャフト92に伝達するギア89等を備える。モータ80は、ギア89を正逆回転させる三相ブラシレスモータである。電動パワーステアリング装置1は、ステアリングホイール91の操舵方向および操舵トルクに応じた操舵補助トルクをステアリングシャフト92に伝達する。
【0023】
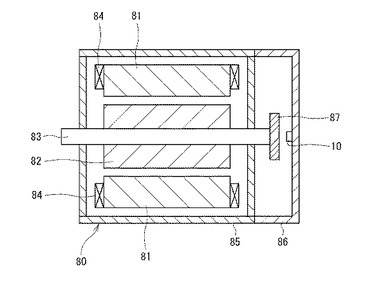
モータ80の概略構成を、図2に示す。モータ80は、ステータ81、ロータ82、および、シャフト83等を有している。ロータ82は、シャフト83とともに回転する筒状の部材であり、その表面に永久磁石が貼り付けられ、磁極を有している。ステータ81は、その内部にロータ82を相対回転可能に収容している。ステータ81は、径内方向へ所定角度毎に突出する突出部を有し、この突出部にコイル84が巻回されている。コイル84への通電によって生じる磁界を受けて、ロータ82はシャフト83とともに回転する。ステータ81、ロータ82、シャフト83、および、コイル84は、ハウジング85に収容される。シャフト83は、ハウジング85の両端から突出し、カバー86側の端部に被検出部87を有する。被検出部87は、円板状に形成される2極磁石であり、シャフト83と一体となって回転する。カバー86の被検出部87と対向する位置には、回転角検出装置10が設けられる。本実施形態では、回転角検出装置10は、カバー86の一箇所に設けられているが、複数箇所に設けるように構成してもよい。回転角検出装置10は、ロータ82およびシャフト83と一体となって回転する被検出部87の回転角度を検出する。
【0024】
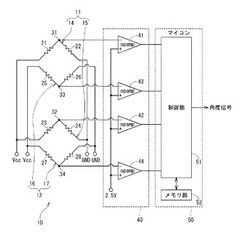
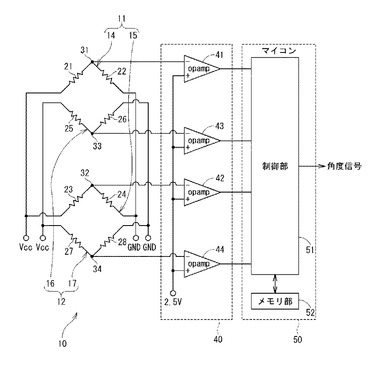
回転角検出装置10の回路構成を、図3に示す。図3に示すように、回転角検出装置10は、第1ブリッジ回路11、第2ブリッジ回路12、増幅部40、マイコン50等を有している。なお、第1ブリッジ回路11および第2ブリッジ回路12が「回路部」に対応している。
【0025】
第1ブリッジ回路11は、第1ハーフブリッジ14および第2ハーフブリッジ15を有する。第1ハーフブリッジ14は、2つのセンサ素子21、22から構成される。センサ素子21、22の接続点である中点31は、増幅部40の第1オペアンプ41に接続する。第2ハーフブリッジ15は、2つのセンサ素子23、24から構成される。センサ素子23、24の接続点である中点32は、増幅部40の第2オペアンプ42に接続する。
【0026】
第2ブリッジ回路12は、第3ハーフブリッジ16および第4ハーフブリッジ17を有する。第3ハーフブリッジ16は、2つのセンサ素子25、26から構成される。センサ素子25、26の接続点である中点33は、増幅部40の第3オペアンプ43に接続する。第4ハーフブリッジ17は、2つのセンサ素子27、28から構成される。センサ素子27、28の接続点である中点34は、増幅部40の第4オペアンプ44に接続する。
【0027】
本実施形態のセンサ素子21〜28は、いずれも被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化する磁気抵抗素子である。磁気抵抗素子としては、例えばGMR素子が好適に用いられる。
【0028】
なお、ハーフブリッジ14〜17のそれぞれが「センサ素子組」に対応している。本実施形態では、1つの出力信号を出力するセンサ素子組を便宜上、「ハーフブリッジ」としているが、ブリッジ回路を構成するセンサ素子組は、2組に限定されることはなく、また、センサ素子組を構成するセンサ素子数も2つに限定されることはない。
【0029】
第1ハーフブリッジ14および第3ハーフブリッジ16と、第2ハーフブリッジ15および第4ハーフブリッジ17とは、その磁化方向が概ね90度ずれるようにセンサ素子21〜28が実装されている。本実施形態では、第1ハーフブリッジ14の中点31および第3ハーフブリッジ16の中点33からはcos信号が出力され、第2ハーフブリッジ15の中点32および第4ハーフブリッジ17の中点34からはsin信号が出力される。
【0030】
cos信号を出力する第1ハーフブリッジ14およびsin信号を出力する第2ハーフブリッジ15からなる第1ブリッジ回路11と、cos信号を出力する第3ハーフブリッジ16およびsin信号を出力する第4ハーフブリッジ17からなる第2ブリッジ回路12とは、それぞれ別々の電源に接続されている。これにより、一方のブリッジ回路が故障したとしても、他方のブリッジ回路から出力されるcos信号およびsin信号を用いて被検出部87の回転角度δの算出を継続することができる。
【0031】
増幅部40は、第1オペアンプ41、第2オペアンプ42、第3オペアンプ43、および第4オペアンプ44を有する。
【0032】
第1オペアンプ41は、第1ハーフブリッジ14の中点31から出力される信号を増幅し、+cos信号である出力信号Vx1をマイコン50に出力する。第2オペアンプ42は、第2ハーフブリッジ15の中点32から出力される信号を増幅し、+sin信号である出力信号Vy1をマイコン50に出力する。第3オペアンプ43は、第3ハーフブリッジ16の中点33から出力される信号を増幅し、−cos信号である出力信号Vx2をマイコン50に出力する。第4オペアンプ44は、第4ハーフブリッジ17の中点34から出力される信号を増幅し、−sin信号である出力信号Vy2をマイコン50に出力する。
【0033】
回転角検出装置10の電源電圧Vccが5[V]である場合、増幅部40にて増幅され、マイコン50に出力される4つの出力信号Vx1、Vx2、Vy1、Vy2は、以下の式(1)〜(4)で表される。
【0034】
Vx1= cosδ+2.5 …(1)
Vx2=−cosδ+2.5 …(2)
Vy1= sinδ+2.5 …(3)
Vy2=−sinδ+2.5 …(4)
以下、cos信号である出力信号Vx1、Vx2を、適宜「(+)cos信号Vx1」、「(−)cos信号Vx2」という。同様に、sin信号である出力信号Vy1、Vy2を、適宜「(+)sin信号Vy1」、「(−)sin信号Vy2」という。
【0035】
マイコン50は、制御部51および記憶部としてのメモリ部52を有する。制御部51は、位相補正値算出処理、補正前回転角度算出処理、補正処理等の各種演算処理を実行する。メモリ部52は、制御部51にて算出された位相補正値等を記憶するためのものである。なお、本実施形態においては、ハーフブリッジ14〜17のそれぞれの中点31〜34から出力される出力信号は、いずれも別個に増幅部40にて増幅された後に制御部51に入力されている。すなわち、本実施形態では、制御部51が出力信号を取得する前の段階において、出力信号同士の加算処理或いは差動増幅処理等がなされていない。
【0036】
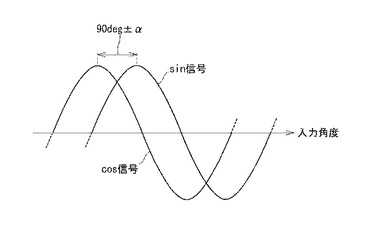
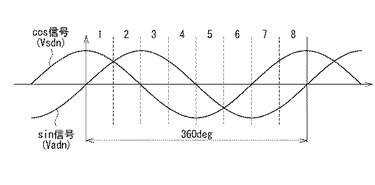
ここで、cos信号およびsin信号について、図4に基づいて説明する。なお、図4中には、cos信号およびsin信号の1周期分を示した。
【0037】
第1ハーフブリッジ14および第3ハーフブリッジ16の磁化方向と、第2ハーフブリッジ15および第4ハーフブリッジ17の磁化方向とのなす角度が90度となるようにセンサ素子21〜28が配置されているとき、第1ハーフブリッジ14および第3ハーフブリッジ16から出力されるcos信号と、第2ハーフブリッジ15および第4ハーフブリッジ17から出力されるsin信号との位相差は90度となる。しかしながら、磁化方向は目視で確認できないため、第1ハーフブリッジ14および第3ハーフブリッジ16の磁化方向と、第2ハーフブリッジ15および第4ハーフブリッジ17の磁化方向とのなす角度が正確に90度となるように実装することは困難である。そのため、実際には図4に示すように、cos信号とsin信号との位相差は、90±αとなる。以下、cos信号を基準とし、cos信号とsin信号との位相差から90度を減じた差分値αを、「位相ずれ」ということにする。具体的には、cos信号とsin信号との位相差が89度である場合、位相ずれαは−1度であり、cos信号とsin信号との位相差が91度である場合、位相ずれαは+1度であるといった具合である。
【0038】
本実施形態では、位相ずれαを補正するための位相補正値φを、出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出している。
【0039】
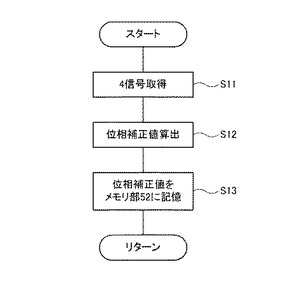
ここで、位相補正値φを算出する位相補正値算出処理を図5に示すフローチャートに基づいて説明する。位相補正値算出処理は、図6および図7に示すEPS駆動時に実行される回転角検出処理に先立ち、例えばモータ80に回転角検出装置10を組み付けたときに実施される処理である。
【0040】
最初のステップS11(以下、「ステップ」を省略し、単に記号「S」で示す。)では、4つの出力信号Vx1、Vx2、Vy1、Vy2を取得する。なお、ここで取得される出力信号Vx1、Vx2、Vy1、Vy2は、被検出部87の回転に伴って変化する信号であって、少なくとも1周期分が取得される。被検出部87は、コイル84への通電により回転させてもよいし、手動で回転させてもよい。また、cos信号同士、sin信号同士を減算した値であるcos信号Vx、およびsin信号Vyを算出する。cos信号同士、sin信号同士を減算することにより、温度特性等によるセンサ誤差を消去することができる。cos信号Vx、およびsin信号Vyは、以下の式(5)、(6)で表される。
【0041】
Vx=Vx1−Vx2=2cosδ …(5)
Vy=Vy1−Vy2=2sinδ …(6)
S12では、S11で取得した出力信号Vx1、Vx2、Vy1、Vy2、および、S11で算出したcos信号Vx、sin信号Vyに基づき、位相ずれαを補正するための位相補正値φを算出する。本実施形態では、用いる信号の組み合わせが異なる9つの定数である位相補正値φ0〜φ8が算出される。位相補正値φ0〜φ8の算出方法については、後述する。なお、位相補正値φは、取得される信号数に応じ、信号の組み合わせごとに算出しておくことが望ましい。
【0042】
S13では、S12で算出された位相補正値φ0〜φ8をメモリ部52に記憶し、本処理を終了する。
【0043】
ここで、位相補正値φ0〜φ8の算出方法について説明する。
【0044】
<位相補正値φ0>
位相補正値φ0は、センサ誤差等を消去したcos信号Vxおよびsin信号Vyに基づいて算出される。ここで、cos信号Vxを基準としたときのcos信号Vxとsin信号Vyの位相ずれをα0とすると、cos信号Vxおよびsin信号Vyは、以下のように表される。
【0045】
Vx=2cosδ …(5)
Vy=2sin(δ+α0) …(7)
ここで、式(5)に示すcos信号Vxおよび式(7)に示すsin信号Vyを用いて位相補正値φ0を算出する方法を説明する。
【0046】
まず、cos信号Vxからsin信号Vyを減算した減算値Vs0を算出する。減算値Vs0は、以下の式(8)のように表される。
【0047】
Vs0=Vx−Vy=2cosδ−2sin(δ+α0)
=2{cosδ+cos(δ+90+α0)} …(8)
上記式(8)を和積の公式(9)により変形すると、減算値Vs0は、以下の式(10)のように表される。
【0048】
cosA+cosB=2cos{(A+B)/2}cos{(A−B)/2}
…(9)
Vs0=2{cosδ+cos(δ+90+α0)}
=4cos{(δ+δ+90+α0)/2}
×cos[{δ−(δ+90+α0)}/2]
=4cos(δ+45+α0/2)cos{−(45+α0/2)}
=4cos(δ+45+α0/2)cos(45+α0/2) …(10)
また、cos信号Vxにsin信号Vyを加算した加算値Va0を算出する。加算値Va0は、以下の式(11)のように表される。
【0049】
Va0=Vx+Vy=2cosδ+2sin(δ+α0)
=2{cosδ−cos(δ+90+α0)} …(11)
上記式(11)を和積の公式(12)により変形すると、加算値Va0は、以下の式(13)のように表される。
【0050】
cosA−cosB=−2sin{(A+B)/2}sin{(A−B)/2}
…(12)
Va0=2{cosδ−cos(δ+90+α0)}
=−4sin{(δ+δ+90+α0)/2}
×sin[{δ−(δ+90+α0)}/2]
=−4sin(δ+45+α0/2)sin{−(45+α0/2)}
=4sin(δ+45+α0/2)sin(45+α0/2) …(13)
また、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、以下の式(14)、(15)のように表される。
【0051】
Vs0max=4cos{(45+α0/2)} …(14)
Va0max=4sin{(45+α0/2)} …(15)
なお、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、被検出部87を回転させることにより、定数として取得可能である。
【0052】
ここで、加算値Va0の最大値Va0maxを減算値Vs0の最大値Vs0maxで除した値のarctan(以下、適宜「ATAN」という。)を位相補正値φ0として算出すると、以下の式(16)のように表される。
【0053】
φ0=ATAN(Va0max/Vs0max)
=ATAN[4sin{(45+α0/2)}/4cos{(45+α0/2)}]
=45+α0/2 …(16)
上述の通り、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、定数であるので、位相補正値φ0も定数として算出される。
【0054】
ここまでは、cos信号Vxおよびsin信号Vyを用いて位相補正値φ0を算出する方法について説明したが、他のcos信号およびsin信号を用いた場合についても、式(8)〜(16)にて説明したのと同様にして、位相補正値φ1〜φ8を求めることができる。以下、位相補正値φ1〜φ8について言及しておく。
【0055】
<位相補正値φ1>
位相補正値φ1は、−cos信号Vx2およびsin信号Vyに基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα1とすると、−cos信号Vx2およびsin信号Vyは、以下のように表される。なお、−cos信号Vx2については、制御部51内でオフセット値を消去し、+cos信号に換算した値−Vx2aを用いる。
【0056】
Vx2a=−cosδ
−Vx2a=cosδ …(17)
Vy=2sin(δ+α1) …(18)
ここで、cos信号−Vx2aからsin信号Vyを減算した減算値Vs1を算出する。なおここでは、cos信号−Vx2aとsin信号Vyとの振幅を合わせるため、cos信号−Vx2aを2倍しているが、sin信号であるVyを1/2倍してもよい。以下の例でも同様である。
【0057】
Vs1=−2Vx2a−Vy=2cosδ−2sin(δ+α1)
=2{cosδ+cos(δ+90+α1)} …(19)
上記式(19)を和積の公式にて変形すると、減算値Vs1は、式(20)のように表される。
【0058】
Vs1=4cos(δ+45+α1/2)cos(45+α1/2) …(20)
また、振幅を合わせたうえで、cos信号−Vx2aにsin信号Vyを加算した加算値Va1は、以下の式(21)のように表される。
【0059】
Va1=−2Vx2a+Vy=2cosδ+2sin(δ+α1)
=2{cosδ−cos(δ+90+α1)} …(21)
上記式(21)を和積の公式にて変形すると、加算値Va1は、式(22)のように表される。
【0060】
Va1=4sin(δ+45+α1/2)sin(45+α1/2) …(22)
また、減算値Vs1の最大値Vs1max、および、加算値Va1の最大値Va1maxは、以下の式(23)、(24)のように表される。
【0061】
Vs1max=4cos(45+α1/2) …(23)
Va1max=4sin(45+α1/2) …(24)
加算値Va1の最大値Va1maxを減算値Vs1の最大値Vs1maxで除した値のarctanを位相補正値φ1として算出すると、以下の式(25)のように表される。
【0062】
φ1=ATAN(Va1max/Vs1max)=45+α1/2 …(25)
<位相補正値φ2>
位相補正値φ2は、+cos信号Vx1およびsin信号Vyに基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα2とすると、+cos信号Vx1およびsin信号Vyは、以下のように表される。なお、+cos信号Vx1については、制御部51内でオフセット値を消去した値Vx1aを用いる。
【0063】
Vx1a=cosδ …(26)
Vy=2sin(δ+α2) …(27)
ここで、振幅を合わせたうえで、+cos信号Vx1aからsin信号Vyを減算した減算値Vs2は、
Vs2=2Vx1a−Vy=2cosδ−2sin(δ+α2)
=2{cosδ+cos(δ+90+α2)} …(28)
となる。上記式(28)を和積の公式にて変形すると、減算値Vs2は、式(29)のように表される。
【0064】
Vs2=4cos(δ+45+α2/2)cos(45+α2/2) …(29)
また、振幅を合わせたうえで、+cos信号Vx1aにsin信号Vyを加算した加算値Va2は、
Va2=2Vx1a+Vy=2cosδ+2sin(δ+α2)
=2{cosδ−cos(δ+90+α2)} …(30)
となる。上記式(30)を和積の公式にて変形すると、加算値Va2は、式(31)のように表される。
【0065】
Va2=4sin(δ+45+α2/2)sin(45+α2/2) …(31)
また、減算値Vs2の最大値Vs2max、および、加算値Va2の最大値Va2maxは、以下の式(32)、(33)のように表される。
【0066】
Vs2max=4cos(45+α2/2) …(32)
Va2max=4sin(45+α2/2) …(33)
加算値Va2の最大値Va2maxを減算値Vs2の最大値Vs2maxで除した値のarctanを位相補正値φ2として算出すると、以下の式(34)のように表される。
【0067】
φ2=ATAN(Va2max/Vs2max)=45+α2/2 …(34)
<位相補正値φ3>
位相補正値φ3は、cos信号Vxおよび−sin信号Vy2に基づいて算出される。ここで、cos信号Vxを基準としたときの位相ずれをα3とすると、cos信号Vxおよび−sin信号Vy2は、以下のように表される。なお、−sin信号Vy2については、制御部51内でオフセット値を消去し、+sin信号に換算した値−Vy2aを用いる。
【0068】
Vx=2cosδ …(5)
Vy2a=−sin(δ+α3)
−Vy2a=sin(δ+α3) …(35)
ここで、振幅を合わせたうえで、cos信号Vxからsin信号−Vy2aを減算した減算値Vs3は、
Vs3=Vx−(−2Vy2a)=2cosδ−2sin(δ+α3)
=2{cosδ+cos(δ+90+α3)} …(36)
となる。上記式(36)を和積の公式にて変形すると、減算値Vs3は、式(37)のように表される。
【0069】
Vs3=4cos(δ+45+α3/2)cos(45+α3/2) …(37)
また、振幅を合わせたうえで、cos信号Vxにsin信号−Vy2aを加算した加算値Va3は、
Va3=Vx+(−2Vy2a)=2cosδ+2sin(δ+α3)
=2{cosδ−cos(δ+90+α3)} …(38)
となる。上記式(38)を和積の公式にて変形すると、加算値Va3は、式(39)のように表される。
【0070】
Va3=4sin(δ+45+α3/2)sin(45+α3/2) …(39)
また、減算値Vs3の最大値Vs3max、および、加算値Va3の最大値Va3maxは、以下の式(40)、(41)のように表される。
【0071】
Vs3max=4cos(45+α3/2) …(40)
Va3max=4sin(45+α3/2) …(41)
加算値Va3の最大値Va3maxを減算値Vs3の最大値Vs3maxで除した値のarctanを位相補正値φ3として算出すると、以下の式(42)のように表される。
【0072】
φ3=ATAN(Va3max/Vs3max)=45+α3/2 …(42)
<位相補正値φ4>
位相補正値φ4は、cos信号Vxおよび+sin信号Vy1に基づいて算出される。ここで、cos信号Vxを基準としたときの位相ずれをα4とすると、cos信号Vxおよび+sin信号Vy1は、以下のように表される。なお、+sin信号Vy1については、制御部51内でオフセット値を消去した値Vy1aを用いる。
【0073】
Vx=2cosδ …(5)
Vy1a=sin(δ+α4) …(43)
ここで、振幅を合わせたうえで、cos信号Vxから+sin信号Vy1aを減算した減算値Vs4は、
Vs4=Vx−2Vy1a=2cosδ−2sin(δ+α4)
=2{cosδ+cos(δ+90+α4)} …(44)
となる。上記式(44)を和積の公式にて変形すると、減算値Vs4は、式(45)のように表される。
【0074】
Vs4=4cos(δ+45+α4/2)cos(45+α4/2) …(45)
また、振幅を合わせたうえで、cos信号Vxに+sin信号Vy1aを加算した加算値Va4は、
Va4=Vx+2Vy1a=2cosδ+2sin(δ+α4)
=2{cosδ−cos(δ+90+α4)} …(46)
となる。上記式(46)を和積の公式にて変形すると、加算値Va4は、式(47)のように表される。
【0075】
Va4=4sin(δ+45+α4/2)sin(45+α4/2) …(47)
ここで、減算値Vs4の最大値Vs4max、および、加算値Va4の最大値Va4maxは、以下の式(48)、(49)で表される。
【0076】
Vs4max=4cos(45+α4/2) …(48)
Va4max=4sin(45+α4/2) …(49)
加算値Va4の最大値Va4maxを減算値Vs4の最大値Vs4maxで除した値のarctanを位相補正値φ4として算出すると、以下の式(50)のように表される。
【0077】
φ4=ATAN(Va4max/Vs4max)=45+α4/2 …(50)
<位相補正値φ5>
位相補正値φ5は、−cos信号Vx2および−sin信号Vy2に基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα5とすると、−cos信号Vx2および−sin信号Vy2は、以下のように表される。なお、−cos信号Vx2および−sin信号Vy2については、制御部51内でオフセットを消去し、+cos信号または+sin信号に換算した値−Vx2a、−Vy2aを用いる。
【0078】
Vx2a=−cosδ
−Vx2a=cosδ …(51)
Vy2a=−sin(δ+α5)
−Vy2a=sin(δ+α5) …(52)
ここで、cos信号−Vx2aからsin信号−Vy2aを減算した減算値Vs5は、
Vs5=−Vx2a−(−Vy2a)=cosδ−sin(δ+α5)
=cosδ+cos(δ+90+α5) …(53)
となる。上記式(53)を和積の公式にて変形すると、減算値Vs5は、式(54)のように表される。
【0079】
Vs5=2cos(δ+45+α5/2)cos(45+α5/2) …(54)
また、cos信号−Vx2aにsin信号−Vy2aを加算した加算値Va5は、
Va5=−Vx2a+(−Vy2a)=cosδ+sin(δ+α5)
=cosδ−cos(δ+90+α5) …(55)
となる。上記式(55)を和積の公式にて変形すると、加算値Va5は、式(56)のように表される。
【0080】
Va5=2sin(δ+45+α5/2)sin(45+α5/2) …(56)
ここで、減算値Vs5の最大値Vs5max、および、加算値Va5の最大値Va5maxは、以下の式(57)、(58)で表される。
【0081】
Vs5max=2cos(45+α5/2) …(57)
Va5max=2sin(45+α5/2) …(58)
加算値Va5の最大値Va5maxを減算値Vs5の最大値Vs5maxで除した値のarctanを位相補正値φ5として算出すると、以下の式(58)のように表される。
【0082】
φ5=ATAN(Va5max/Vs5max)=45+α5/2 …(59)
<位相補正値φ6>
位相補正値φ6は、−cos信号Vx2および+sin信号Vy1に基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα6とすると、−cos信号Vx2および+sin信号Vy1は、以下のように表される。なお、−cos信号Vx2および+sin信号Vy1については制御部51内でオフセットを除去し、−cos信号Vx2については+cos信号に換算した値−Vx2a、Vy1aを用いる。
【0083】
Vx2a=−cosδ
−Vx2a=cosδ …(60)
Vy1a=sin(δ+α6) …(61)
ここで、cos信号−Vx2aから+sin信号Vy1aを減算した減算値Vs6は、
Vs6=−Vx2a−Vy1a=cosδ−sin(δ+α6)
=cosδ+cos(δ+90+α6)} …(62)
となる。上記式(62)を和積の公式にて変形すると、減算値Vs6は、式(63)のように表される。
【0084】
Vs6=2cos(δ+45+α6/2)cos(45+α6/2) …(63)
また、cos信号−Vx2aに+sin信号Vy1aを加算した加算値Va6は、
Va6=−Vx2a+Vy1a=cosδ+sin(δ+α6)
=cosδ−cos(δ+90+α6) …(64)
となる。上記式(64)を和積の公式にて変形すると、加算値Va6は、式(65)のように表される。
【0085】
Va6=2sin(δ+45+α6/2)sin(45+α6/2) …(65)
ここで、減算値Vs6の最大値Vs6max、および、加算値Va6の最大値Va6maxは、以下の式(66)、(67)のように表される。
【0086】
Vs6max=2cos(45+α6/2) …(66)
Va6max=2sin(45+α6/2) …(67)
加算値Va6の最大値Va6maxを減算値Vs6の最大値Vs6maxで除した値のarctanを位相補正値φ6として算出すると、以下の式(68)のように表される。
【0087】
φ6=ATAN(Va6max/Vs6max)=45+α6/2 …(68)
<位相補正値φ7>
位相補正値φ7は、+cos信号Vx1および−sin信号Vy2に基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα7とすると、+cos信号Vx1および−sin信号Vy2は、以下のように表される。なお、+cos信号Vx1および−sin信号Vy2については制御部51内でオフセットを除去し、−sin信号Vy2については+sin信号に換算した値Vx1a、−Vy2aを用いる。
【0088】
Vx1a=cosδ …(69)
Vy2a=−sin(δ+α7)
−Vy2a=sin(δ+α7) …(70)
ここで、+cos信号Vx1aからsin信号−Vy2aを減算した減算値Vs7は、
Vs7=Vx1a−(−Vy2a)=cosδ−sin(δ+α7)
=cosδ+cos(δ+90+α7) …(71)
となる。上記式(71)を和積の公式にて変形すると、減算値Vs7は、式(72)のように表される。
【0089】
Vs7=2cos(δ+45+α7/2)cos(45+α7/2) …(72)
また、+cos信号Vx1aにsin信号−Vy2aを加算した加算値Va7は、
Va7=Vx1a+(−Vy2a)=cosδ+sin(δ+α7)
=cosδ−cos(δ+90+α7) …(73)
となる。上記式(73)を和積の公式にて変形すると、加算値Va7は、式(74)のように表される。
【0090】
Va7=2sin(δ+45+α7/2)sin(45+α7/2) …(74)
ここで、減算値Vs7の最大値Vs7max、および、加算値Va7の最大値Va7maxは、以下の式(75)、(76)で表される。
【0091】
Vs7max=2cos(45+α7/2) …(75)
Va7max=2sin(45+α7/2) …(76)
加算値Va7の最大値Va7maxを減算値Vs7の最大値Vs7maxで除した値のarctanを位相補正値φ7として算出すると、以下の式(77)のように表される。
【0092】
φ7=ATAN(Va7max/Vs6max)=45+α7/2 …(77)
<位相補正値φ8>
位相補正値φ8は、+cos信号Vx1および+sin信号Vy1に基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα8とすると、+cos信号Vx1および+sin信号Vy1は、以下のように表される。なお、+cos信号Vx1および+sin信号Vy1については、制御部51内でオフセットを除去した値Vx1a、Vy1aを用いる。
【0093】
Vx1a=cosδ …(78)
Vy1a=sin(δ+α8) …(79)
ここで、+cos信号Vx1aから+sin信号Vy1aを減算した減算値Vs8は、
Vs8=Vx1a−Vy1a=cosδ−sin(δ+α8)
=cosδ+cos(δ+90+α8) …(80)
となる。上記式(80)を和積の公式にて変形すると、減算値Vs8は、式(81)のように表される。
【0094】
Vs8=2cos(δ+45+α8/2)cos(45+α8/2) …(81)
また、+cos信号Vx1aに+sin信号Vy1aを加算した加算値Va8は、
Va8=Vx1a+Vy1a=cosδ+sin(δ+α8)
=cosδ−cos(δ+90+α8) …(82)
となる。上記式(82)を和積の公式にて変形すると、加算値Va8は、式(83)のように表される。
【0095】
Va8=2sin(δ+45+α8/2)sin(45+α8/2) …(83)
ここで、減算値Vs8の最大値Vs8max、および、加算値Va8の最大値Va8maxは、以下の式(84)、(85)で表される。
【0096】
Vs8max=2cos(45+α8/2) …(84)
Va8max=2sin(45+α8/2) …(85)
加算値Va8の最大値Va8maxを減算値Vs8の最大値Vs8maxで除した値のarctanを位相補正値φ8として算出すると、以下の式(86)のように表される。
【0097】
φ8=ATAN(Va8max/Vs8max)=45+α8/2 …(86)
このように算出された位相補正値φ0〜φ8は、いずれも定数であり、算出された位相補正値φ0〜φ8は、メモリ部52に記憶される(図5中のS13)。
【0098】
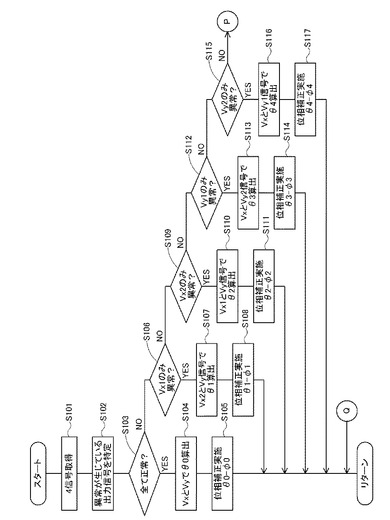
次に、被検出部87の回転角度を検出する回転角検出処理を図6および図7に示すフローチャートに基づいて説明する。図6および図7に示す回転角検出処理は、EPS動作時に所定の間隔、例えば200μsごと、に制御部51にて実行される処理である。
【0099】
図6中のS101では、4つの出力信号Vx1、Vx2、Vy1、Vy2を取得する。また、cos信号同士、sin信号同士を減算した値であるcos信号Vx、およびsin信号Vyを算出する(式(1)〜式(6)参照)。
【0100】
S102では、S101にて取得された4つの出力信号Vx1、Vx2、Vy1、Vy2に異常が生じているか判定するとともに、異常が生じている出力信号を特定する。異常が生じている出力信号の特定は、公知の方法で行うことができるが、例えば所定の上限値を上回った場合、または所定の下限値を下回った場合、当該出力信号に異常が生じていると特定することができる。
【0101】
S103では、全ての出力信号が正常であるか否かを判断する。少なくとも1つの出力信号に異常が生じている場合(S103:NO)、S106へ移行する。全ての出力信号が正常である場合(S103:YES)、S104へ移行する。
【0102】
S104では、全ての出力信号が正常であるので、cos信号Vxおよびsin信号Vyに基づいて補正前回転角度θ0を算出する。
【0103】
ここで、補正前回転角度θnの算出方法について説明する。補正前回転角度θnは、図6および図7に示す回転角検出処理におけるステップにて、位相補正値φ0〜φ8に対応して算出される。具体的には、位相補正値φ0の算出に用いた出力信号および当該出力信号を用いて算出された演算値から補正前回転角度θ0が算出される、といった具合である。
【0104】
まず、補正前回転角度θnの算出に先立ち、位相補正値φ0〜φ8の算出に用いた減算値Vsn、加算値Van、減算値Vsnの最大値Vsnmax、および、加算値Vanの最大値Vanmaxを用い、振幅を合わせるべく、減算値Vsnを減算値Vsnの最大値Vsnmaxで除した値Vsdn、および、加算値Vanを加算値Vanの最大値Vanmaxで除した値Vadnを算出する。
【0105】
Vsdn=Vsn/Vsnmax=cos(δ+45+αn/2) …(87)
Vadn=Van/Vanmax=sin(δ+45+αn/2) …(88)
なお、VsdnおよびVadnは、具体的には、Vsd0がVs0をVs0maxで除して算出され、Vad0がVa0をVa0maxで除して算出される、といった具合であり、本実施形態ではn=0〜8である。
【0106】
次に、VsdnおよびVadnを用いて算出されるarctanである角度γnから補正前回転角度θnを算出する方法について、図8および図9に基づいて説明する。図8は、補正前回転角度θnの算出に係る角度範囲の分割を説明する図であって、sin信号およびcos信号を説明する図である。図8におけるsin信号はVadnであり、cos信号はVsdnである。図9は、角度γnに基づいて補正前回転角度θnを算出する算出方法を説明する図である。
【0107】
補正前回転角度θnは、VsdnおよびVadnを用いて算出されるarctanである角度γn(ただしn=0〜8)に基づいて算出される。角度γnは、式(89)、(90)のように表される。
【0108】
γn=ATAN(Vadn/Vsdn) …(89)
γn=ATAN(Vsdn/Vadn) …(90)
式(89)および式(90)に示したように、角度γnは、sin信号であるVadnをcos信号であるVsdnで除した値(以下、「tan値」という。)、または、cos信号であるVsdnをsin信号であるVadnで除した値(以下、「cot値」という。)のarctanとして算出される。VadnおよびVsdnは、0となる角度があるため、0で除することを避けるため、sin信号であるVadnが0となる角度を含む角度範囲においては、cos信号で除するtan値に基づいて角度γnを算出し、cos信号であるVsdnが0となる角度を含む角度範囲においては、sin信号で除するcot値に基づいて角度γnを算出する。なお、VadnまたはVsdnが−信号である場合、例えば−1等を乗じることにより、+信号に変換してからtan値およびcot値を算出する。
【0109】
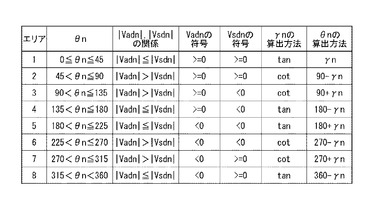
また、補正前回転角度θnを0〜360度とすると、異なる補正前回転角度θnでtan値またはcot値が同じになる場合があるので、Vadnの絶対値とVsdnの絶対値との大小関係、Vadnの符号、およびVsdnの符号に基づき、補正前回転角度θnの角度範囲を特定したうえで、tan値またはcot値のarctanに基づき、補正前回転角度θnを算出する。
【0110】
具体的には、図8および図9に示すように、Vadnの絶対値とVsdnの絶対値との大小関係、Vadnの符号、およびVsdnの符号に基づき、補正前回転角度θnの0〜360度を8つの角度範囲であるエリア1〜エリア8のどこに該当するかを特定する。そして、Vadnの絶対値とVsdnの絶対値とを比較し、絶対値の大きい方が分母となるようにtan値またはcot値を用い、tan値またはcot値のarctanである角度γnを算出する。なお、図9中の「γの算出方法」においては、γの算出に係り、tan値またはcot値のどちらを用いてarctanを求めているかを示している。補正前回転角度θnの角度範囲が特定されているので、図9に示すように、基準となる0度(=360度)、90度、180度、または270度に算出された角度γnを加算または減算することにより、補正前回転角度θnを算出する。
【0111】
また、補正前回転角度θnは、以下の式(91)のように表される。
【0112】
θn=δ+45+αn/2 …(91)
図6に戻り、上述のS104では、Vad0およびVsd0に基づくtan値またはcot値のarctanである角度γ0から算出される補正前回転角度θ0は、以下の式(92)のように表される。
【0113】
θ0=δ+45+α0/2 …(92)
S105では、cos信号Vxおよびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ0を取得する。そして取得した位相補正値φ0に基づき、S104で算出した補正前回転角度θ0を補正する。具体的には、補正前回転角度θ0から位相補正値φ0を減算することにより、式(93)に示すように、被検出部87の回転角度δを算出することができる。
【0114】
θ0−φ0=(δ+45+α0/2)−(45+α0/2)=δ …(93)
少なくとも1つの出力信号に異常が生じている場合(S103:NO)に移行するS106では、+cos信号Vx1のみに異常が生じているか否かを判断する。+cos信号Vx1に異常が生じていない場合、または、+cos信号Vx1の異常に加え他の出力信号にも異常が生じている場合(S106:NO)、S109へ移行する。+cos信号Vx1のみに異常が生じている場合(S106:YES)、S107へ移行する。
【0115】
S107では、+cos信号Vx1のみに異常が生じているので、異常が生じていない−cos信号Vx2、および、sin信号同士を減算してセンサ誤差等を消去したsin信号Vyに基づいて補正前回転角度θ1を算出する。Vad1およびVsd1に基づくtan値またはcot値のarctanである角度γ1から算出される補正前回転角度θ1は、以下の式(94)のように表される。
【0116】
θ1=δ+45+α1/2 …(94)
S108では、−cos信号Vx2およびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ1を取得する。そして取得した位相補正値φ1に基づき、S107で算出した補正前回転角度θ1を補正する。具体的には、補正前回転角度θ1から位相補正値φ1を減算することにより、式(95)に示すように、被検出部87の回転角度δを算出することができる。
【0117】
θ1−φ1=(δ+45+α1/2)−(45+α1/2)=δ …(95)
+cos信号Vx1に異常が生じていない場合、または、+cos信号Vx1の異常に加え他の出力信号にも異常が生じている場合(S106:NO)に移行するS109では、−cos信号Vx2のみに異常が生じているか否かを判断する。−cos信号Vx2に異常が生じていない場合、または、−cos信号Vx2の異常に加え他の出力信号にも異常が生じている場合(S109:NO)、S112へ移行する。−cos信号Vx2のみに異常が生じている場合(S109:YES)、S110へ移行する。
【0118】
S110では、−cos信号Vx2のみに異常が生じているので、異常が生じていない+cos信号Vx1、および、sin信号同士を減算してセンサ誤差等を消去したsin信号Vyに基づいて補正前回転角度θ2を算出する。Vad2およびVsd2に基づくtan値またはcot値のarctanである角度γ2から算出される補正前回転角度θ2は、以下の式(96)のように表される。
【0119】
θ2=δ+45+α2/2 …(96)
S111では、+cos信号Vx1およびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ2を取得する。そして取得した位相補正値φ2に基づき、S110で算出した補正前回転角度θ2を補正する。具体的には、補正前回転角度θ2から位相補正値φ2を減算することにより、式(97)に示すように、被検出部87の回転角度δを算出することができる。
【0120】
θ2−φ2=(δ+45+α2/2)−(45+α2/2)=δ …(97)
−cos信号Vx2に異常が生じていない場合、または、−cos信号Vx2の異常に加え他の出力信号にも異常が生じている場合(S109:NO)に移行するS112では、+sin信号Vy1のみに異常が生じているか否かを判断する。+sin信号Vy1に異常が生じていない場合、または、+sin信号Vy1の異常に加え他の出力信号にも異常が生じている場合(S112:NO)、S115へ移行する。+sin信号Vy1のみに異常が生じている場合(S112:YES)、S113へ移行する。
【0121】
S113では、+sin信号Vy1のみに異常が生じているので、異常が生じていない−sin信号Vy2、および、cos信号同士を減算してセンサ誤差等を消去したcos信号Vxに基づいて補正前回転角度θ3を算出する。Vad3およびVsd3に基づくtan値またはcot値のarctanである角度γ3から算出される補正前回転角度θ3は、以下の式(98)のように表される。
【0122】
θ3=δ+45+α3/2 …(98)
S114では、cos信号Vxおよび−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ3を取得する。そして取得した位相補正値φ3に基づき、S113で算出した補正前回転角度θ3を補正する。具体的には、補正前回転角度θ3から位相補正値φ3を減算することにより、式(99)に示すように、被検出部87の回転角度δを算出することができる。
【0123】
θ3−φ3=(δ+45+α3/2)−(45+α3/2)=δ …(99)
+sin信号Vy1に異常が生じていない場合、または、+sin信号Vy1の異常に加え他の出力信号にも異常が生じている場合(S112:NO)に移行するS115では、−sin信号Vy2のみに異常が生じているか否かを判断する。−sin信号Vy2に異常が生じていない場合、または、−sin信号Vy2の異常に加え他の出力信号にも異常が生じている場合(S115:NO)、図7中のS118へ移行する。なお、このS115にて否定判断される場合、少なくとも2つの出力信号に異常が生じている。−sin信号Vy2のみに異常が生じている場合(S115:YES)、S116へ移行する。
【0124】
S116では、−sin信号Vy2のみに異常が生じているので、異常が生じていない+sin信号Vy1、および、cos信号同士を減算してセンサ誤差等を消去したcos信号Vxに基づいて補正前回転角度θ4を算出する。Vad4およびVsd4に基づくtan値またはcot値のarctanである角度γ4から算出される補正前回転角度θ4は、以下の式(100)のように表される。
【0125】
θ4=δ+45+α4/2 …(100)
S117では、cos信号Vxおよび+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ4を取得する。そして取得した位相補正値φ4に基づき、S116で算出した補正前回転角度θ4を補正する。具体的には、補正前回転角度θ4から位相補正値φ4を減算することにより、式(101)に示すように、被検出部87の回転角度δを算出することができる。
【0126】
θ4−φ4=(δ+45+α4/2)−(45+α4/2)=δ …(101)
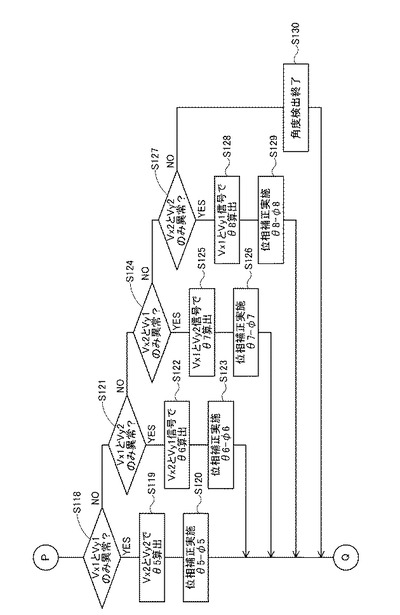
図5に示すように、少なくとも2つの出力信号に異常が生じている場合(S103:NO、S106:NO、S109:NO、S112:NO、かつS115:NO)に移行するS118では、出力信号Vx1、Vy1のみに異常が生じているか否かを判断する。出力信号Vx1、Vy1以外の出力信号に異常が生じている場合(S118:NO)、S121へ移行する。出力信号Vx1、Vy1のみに異常が生じている場合(S118:YES)、S119へ移行する。
【0127】
S119では、異常が生じていない−cos信号Vx2および−sin信号Vy2に基づいて補正前回転角度θ5を算出する。Vad5およびVsd5に基づくtan値またはcot値のarctanである角度γ5から算出される補正前回転角度θ5は、以下の式(102)のように表される。
【0128】
θ5=δ+45+α5/2 …(102)
S120では、−cos信号Vx2および−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ5を取得する。そして取得した位相補正値φ5に基づき、S119で算出した補正前回転角度θ5を補正する。具体的には、補正前回転角度θ5から位相補正値φ5を減算することにより、式(103)に示すように、被検出部87の回転角度δを算出することができる。
【0129】
θ5−φ5=(δ+45+α5/2)−(45+α5/2)=δ …(103)
出力信号Vx1、Vy1以外の出力信号に異常が生じている場合(S118:NO)に移行するS121では、出力信号Vx1、Vy2のみに異常が生じているか否かを判断する。出力信号Vx1、Vy2以外の出力信号に異常が生じている場合(S121:NO)、S124へ移行する。出力信号Vx1、Vy2のみに異常が生じている場合(S121:YES)、S122へ移行する。
【0130】
S122では、異常が生じていない−cos信号Vx2および+sin信号Vy1に基づいて補正前回転角度θ6を算出する。Vad6およびVsd6に基づくtan値またはcot値のarctanである角度γ6から算出される補正前回転角度θ6は、以下の式(104)のように表される。
【0131】
θ6=δ+45+α6/2 …(104)
S123では、−cos信号Vx2および+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ6を取得する。そして取得した位相補正値φ6に基づき、S122で算出した補正前回転角度θ6を補正する。具体的には、補正前回転角度θ6から位相補正値φ6を減算することにより、式(105)に示すように、被検出部87の回転角度δを算出することができる。
【0132】
θ6−φ6=(δ+45+α6/2)−(45+α6/2)=δ …(105)
出力信号Vx1、Vy2以外の出力信号に異常が生じている場合(S121:NO)に移行するS124では、出力信号Vx2、Vy1のみに異常が生じているか否かを判断する。出力信号Vx2、Vy1以外の出力信号に異常が生じている場合(S124:NO)、S127へ移行する。出力信号Vx2、Vy1のみに異常が生じている場合(S124:YES)、S125へ移行する。
【0133】
S125では、異常が生じていない+cos信号Vx1および−sin信号Vy2に基づいて補正前回転角度θ7を算出する。Vad7およびVsd7に基づくtan値またはcot値のarctanである角度γ7から算出される補正前回転角度θ7は、以下の式(106)のように表される。
【0134】
θ7=δ+45+α7/2 …(106)
S126では、+cos信号Vx1および−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ7を取得する。そして、取得した位相補正値φ7に基づき、S125で算出した補正前回転角度θ7を補正する。具体的には、補正前回転角度θ7から位相補正値φ7を減算することにより、式(107)に示すように、被検出部87の回転角度δを算出することができる。
【0135】
θ7−φ7=(δ+45+α7/2)−(45+α7/2)=δ …(107)
出力信号Vx2、Vy1以外の出力信号に異常が生じている場合(S124:NO)に移行するS127では、出力信号Vx2、Vy2のみに異常が生じているか否かを判断する。
出力信号Vx2、Vy2以外の出力信号に異常が生じている場合(S127:NO)、S130へ移行する。出力信号Vx2、Vy2のみに異常が生じている場合(S127:YES)、S128へ移行する。
【0136】
S128では、異常が生じていない+cos信号Vx1および+sin信号Vy1に基づいて補正前回転角度θ8を算出する。Vad8およびVsd8に基づくtan値またはcot値のarctanである角度γ8から算出される補正前回転角度θ8は、以下の式(108)のように表される。
【0137】
θ8=δ+45+α8/2 …(108)
S129では、+cos信号Vx1および+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ8を取得する。そして、取得した位相補正値φ8に基づき、S128で算出した補正前回転角度θ8を補正する。具体的には、補正前回転角度θ8から位相補正値φ8を減算することにより、式(109)に示すように、被検出部87の回転角度δを算出することができる。
【0138】
θ8−φ8=(δ+45+α8/2)−(45+α8/2)=δ …(109)
出力信号Vx2、Vy2以外の出力信号に異常が生じている場合(S127:NO)に移行するS130では、全てのcos信号、全てのsin信号、または全てのcos信号およびsin信号に異常が生じているので、角度検出を終了する。
【0139】
なお、S105、S108、S111、S114、S117、S120、S123、S126、またはS129で算出された回転角度δは、モータ80の駆動制御に用いられる。
【0140】
以上詳述したように、回転角検出装置10の制御部51は、ハーフブリッジ14〜17の中点から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する(図5中のS11および図6中のS101)。取得される出力信号Vx1、Vx2と、Vy1、Vy2とは、位相が異なっている。制御部51は、出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の補正前回転角度θ0〜θ8を算出する(図6中のS104、S107、S110、S113、S116、図7中のS119、S122、S125、S128)。制御部51は、出力信号Vx1、Vx2、Vy1、Vy2に基づき、位相補正値φ0〜φ8を算出する(図5中のS12)。算出された位相補正値φ0〜φ8は、メモリ部52に記憶される(S13)。そして制御部51は、メモリ部52に記憶された位相補正値φ0〜φ8を取得し、取得された位相補正値φ0〜φ8に基づき、補正前回転角度θ0〜θ8を補正し、被検出部87の回転角度δを算出する(図6中のS105、S108、S111、S114、S117、図7中のS120、S123、S126、S129)。これにより、位相補正値φ0〜φ8に基づいて補正前回転角度θ0〜θ8を補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部87の回転角度δを算出することができる。また、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて位相補正値φ0〜φ8を算出するので、外部からの正しい回転角度の測定が不要である。(請求項1)
【0141】
また、本実施形態の出力信号は、cos信号とsin信号とを含んでいる。また、4つの出力信号Vx1、Vx2、Vy1、Vy2が取得される。これにより、出力信号Vx1、Vx2、Vy1、Vy2の一部に異常が生じた場合でも、被検出部87の回転角度δの検出を継続することができる。さらにまた、出力信号Vx1が+cos信号であり、出力信号Vx2が−cos信号であり、出力信号Vy1が+sin信号であり、出力信号Vy2が−sin信号である。これにより、出力信号の一部に異常が生じた場合でも、+cos信号Vx1または−cos信号Vx2のいずれか一方、および、+sin信号Vy1または−sin信号Vy2のいずれか一方が正常であれば、被検出部87の回転角度δの検出を継続することができる。(請求項2〜4)
【0142】
本実施形態では、全ての出力信号Vx1、Vx2、Vy1、Vy2が正常である場合(S103:YES)、+cos信号Vx1および−cos信号Vx2から算出されるcos信号Vxと、+sin信号Vy1および−sin信号Vy2から算出されるsin信号Vyとに基づいて補正前回転角度θ0を算出する(S104)。また、制御部51は、+cos信号Vx1および−cos信号Vx2から算出されるcos信号Vxと、+sin信号Vy1および−sin信号Vy2から算出されるsin信号Vyとに基づいて位相補正値φ0を算出する。そして、位相補正値φ0に基づいて補正前回転角度θ0を補正し、被検出部87の回転角度δを算出する(S105)。これにより、センサ誤差等を消去したcos信号Vxおよびsin信号Vyに基づいて補正前回転角度θ0および位相補正値φ0を算出することができるので、より高精度に被検出部87の回転角度δを算出することができる。(請求項5)
【0143】
+cos信号Vx1のみに異常が生じている場合(S106:YES)、−cos信号Vx2に基づいて補正前回転角度θ1を算出し(S107)、−cos信号Vx2に基づいて算出された位相補正値φ1に基づいて補正前回転角度θ1を補正し、被検出部87の回転角度δを算出する(S108)。
【0144】
また、−cos信号Vx2のみに異常が生じている場合(S109:YES)、+cos信号Vx1に基づいて補正前回転角度θ2を算出し(S110)、+cos信号Vx1に基づいて算出された位相補正値φ2に基づいて補正前回転角度θ2を補正し、被検出部87の回転角度δを算出する(S111)。
【0145】
これにより、+cos信号または−cos信号に異常が生じている場合でも、異常が生じていない+cos信号または−cos信号に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項6)
+sin信号Vy1のみに異常が生じている場合(S112:YES)、−sin信号Vy2に基づいて補正前回転角度θ3を算出し(S113)、−sin信号Vy2に基づいて算出された位相補正値φ3に基づいて補正前回転角度θ3を補正し、被検出部87の回転角度δを算出する(S114)。
【0146】
また、−sin信号Vy2のみに異常が生じている場合(S115:YES)、+sin信号Vy1に基づいて補正前回転角度θ4を算出し(S116)、+sin信号Vy1に基づいて算出された位相補正値φ4に基づいて補正前回転角度θ4を補正し、被検出部87の回転角度δを算出する(S117)。
【0147】
これにより、+sin信号Vy1または−sinVy2信号に異常が生じている場合でも、異常が生じていない+sin信号Vy1または−sin信号Vy2に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項7)
+cos信号Vx1および+sin信号Vy1に異常が生じている場合(S118:YES)、−cos信号Vx2および−sin信号Vy2に基づいて補正前回転角度θ5を算出し(S119)、−cos信号Vx2および−sin信号Vy2に基づいて算出された位相補正値φ5に基づいて補正前回転角度θ5を補正し、被検出部87の回転角度δを算出する(S120)
+cos信号Vx1および−sin信号Vy2に異常が生じている場合(S121:YES)、−cos信号Vx2および+sin信号Vy1に基づいて補正前回転角度θ6を算出し(S122)、−cos信号Vx2および+sin信号Vy1に基づいて算出された位相補正値φ6に基づいて補正前回転角度θ6を補正し、被検出部87の回転角度δを算出する(S123)。
【0148】
また、−cos信号Vx2および+sin信号Vy1に異常が生じている場合(S124:YES)、+cos信号Vx1および−sin信号Vy2に基づいて補正前回転角度θ7を算出し(S125)、+cos信号Vx1および−sin信号Vy2に基づいて算出された位相補正値φ7に基づいて補正前回転角度θ7を補正し、被検出部87の回転角度δを算出する(S126)。
【0149】
−cos信号Vx2および−sin信号Vy2に異常が生じている場合(S127:YES)、+cos信号Vx1および+sin信号Vy1に基づいて補正前回転角度θ8を算出し(S128)、+cos信号Vx1および+sin信号Vy1に基づいて算出された位相補正値φ8に基づいて補正前回転角度θ8を補正し、被検出部87の回転角度δを算出する(S129)。
【0150】
これにより、+cos信号Vx1または−cos信号Vx2、および、+sin信号Vy1または−sin信号Vy2に異常が生じている場合でも、異常が生じていない+cos信号Vx1または−cos信号Vx2、および、+sin信号Vy1または−sin信号Vy2に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項6、7)
また、本実施形態では、被検出部87の回転角度をδ、位相ずれをαとすると、補正前回転角度θは、以下の通りである。
【0151】
θ=δ+45+α/2
また、位相補正値φは、以下の通りである。
【0152】
φ=45+α/2
これにより、例えば補正前回転角度θから位相補正値φを減算することにより、被検出部87の回転角度δを簡素な式で算出することができる。また、位相補正値φは、定数であるので、位相補正値φをメモリ部52等に記憶する場合、位相補正値が関数である場合と比較して、当該メモリ部52における容量を低減することができる。
【0153】
本実施形態の回転角検出装置10は、電動パワーステアリング装置1に用いられる。これにより、電動パワーステアリング装置1のモータ80の回転角度を高精度に算出することができ、電動パワーステアリング装置1の駆動をより精度よく制御することができる。また、出力信号Vx1、Vx2、Vy1、Vy2に異常が生じた場合であっても、出力信号間の位相ずれを補正して高精度に回転角度を算出し、電動パワーステアリング装置1の駆動を継続することができる。(請求項9)
本実施形態では、制御部51が「出力信号取得手段」、「補正前回転角度算出手段」、「位相補正値算出手段」、「補正手段」を構成し、メモリ部52が「記憶部」を構成する。また、図5中のS11および図6中のS101が「出力信号取得手段」の機能としての処理に相当し、図6中のS104、S107、S110、S113、S116、図7中のS119、S122、S125、S128が「補正前回転角度算出手段」の機能としての処理に相当し、図5中のS12が「位相補正値算出手段」の機能としての処理に相当し、図6中のS105、S108、S111、S114、S117、図7中のS120、S123、S126、S129が「補正手段」の機能としての処理に相当する。
【0154】
(他の実施形態)
(ア)上記実施形態では、+cos信号Vx1のみに異常が生じている場合(S106:YES)、−cos信号Vx2およびsin信号Vyから算出される補正前回転角度θ1および位相補正値φ1に基づいて回転角度δを算出した。他の実施形態では、−cos信号Vx2および−sin信号Vy2から算出される補正前回転角度θ5および位相補正値φ5に基づいて回転角度δを算出してもよいし、−cos信号Vx2および+sin信号Vy1から算出される補正前回転角度θ6および位相補正値φ6に基づいて回転角度δを算出してもよい。
【0155】
同様に、−cos信号Vx2のみに異常が生じている場合(S109:YES)、+cos信号Vx1および−sin信号Vy2から算出される補正前回転角度θ7および位相補正値φ7に基づいて回転角度δを算出してもよいし、+cos信号Vx1および+sin信号Vy1から算出される補正前回転角度θ8および位相補正値φ8に基づいて回転角度δを算出してもよい。
【0156】
すなわち、+cos信号または−cos信号に異常が生じている場合、+sin信号、−sin信号、または+sin信号および−sin信号と、異常が生じていない+cos信号または−cos信号とに基づいて補正前回転角度および位相補正値を算出し、算出された補正前回転角度および位相補正値に基づき、被検出部の回転角度を算出する、ということである。
【0157】
また、+sin信号Vy1のみに異常が生じている場合(S112:YES)、−cos信号Vx2および−sin信号Vy2から算出される補正前回転角度θ5および位相補正値φ5に基づいて回転角度δを算出してもよいし、+cos信号Vx1および−sin信号Vy2から算出される補正前回転角度θ7および位相補正値φ7に基づいて回転角度δを算出してもよい。
【0158】
さらにまた、−sin信号Vy2のみに異常が生じている場合(S115:YES)、−cos信号Vx2および+sin信号Vy1から算出される補正前回転角度θ6および位相補正値φ6に基づいて回転角度δを算出してもよいし、+cos信号Vx1および+sin信号Vy1から算出される補正前回転角度θ8および位相補正値φ8に基づいて回転角度δを算出してもよい。
【0159】
すなわち、+sin信号または−sin信号に異常が生じている場合、+cos信号、−cos信号、または+cos信号および−cos信号と、異常が生じていない+sin信号または−sin信号に基づいて補正前回転角度および位相補正値を算出し、算出された補正前回転角度および位相補正値に基づき、被検出部の回転角度を算出する、ということである。
【0160】
また、上記実施形態では、cos信号およびsin信号の全てが正常である場合、cos信号同士を減算したcos信号、および、sin信号同士を減算したsin信号に基づいて補正前回転角度および位相補正値を算出した。他の実施形態では、cos信号およびsin信号の全てが正常である場合、どのようなcos信号とsin信号との組み合わせを用いて補正前回転角度および位相補正値を算出してもよい。
【0161】
また、補正前回転角度および位相補正値の算出方法は、上記実施形態にて説明した方法に限らない。
【0162】
(イ)上記実施形態では、cos信号を基準として位相ずれを補正するための位相補正値を算出したが、他の実施形態では、sin信号を基準として位相ずれを補正するための位相補正値を算出してもよい。なお、出力信号はcos信号およびsin信号に限らず、位相の異なる複数の出力信号としてもよい。その場合、1つの出力信号を基準とし、他の出力信号の位相ずれを補正するための位相補正値を算出すればよい。(請求項2の裏)
(ウ)上記実施形態では、cos信号およびsin信号の振幅が1であり、増幅部40において加算されるオフセット値は2.5であった。他の実施形態では、マイコン50にて出力信号を取得可能な範囲において、振幅およびオフセット値は適宜設定することができる。
【0163】
また、上記実施形態では、取得される+cos信号、−cos信号、+sin信号、および−sin信号の振幅は等しかったが、他の実施形態では、取得される信号の振幅は、出力信号毎に異なっていてもよい。この場合、それぞれの出力信号の振幅がわかっていれば、制御部において演算処理を行い、振幅を補正することにより、上記実施形態と同様にして補正前回転角度および位相補正値を算出し、被検出部の回転角度を算出することができる。
【0164】
(エ)上記実施形態では、回転角検出装置は増幅部を備えていたが、他の実施形態では、増幅部を省き、それぞれのハーフブリッジから出力される出力信号がそのままマイコン50によって取得されるように構成してもよい。
【0165】
(オ)上記実施形態では、2つのブリッジ回路が別々の電源に接続されていたが、他の実施形態では、2つのブリッジ回路が同一の電源に接続されていてもよい。また、一方のブリッジ回路から取得される出力信号が+cos信号および−cos信号であり、他方のブリッジ回路から取得される出力信号が+sin信号および−sin信号であってもよい。
【0166】
(カ)上記実施形態では、ブリッジ回路は2つであったが、他の実施形態では、ブリッジ回路は2つに限らず、1つであってもよいし、3つ以上であってもよい。また、ハーフブリッジから出力され、マイコンにて取得される出力信号は、少なくとも2つの位相の異なる出力信号があれば、いくつであってもよい。さらにまた、1つのハーフブリッジから複数の出力信号を取得してもよい。(請求項1のフォロー)
(キ)上記実施形態では、回転角検出装置を電動パワーステアリング装置に用いたが、これに限らず、他の分野へ適用することはもちろん可能である。(請求項9の裏)
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0167】
1・・・電動パワーステアリング装置
10・・・回転角検出装置
11・・・第1ブリッジ回路(回路部)
12・・・第2ブリッジ回路(回路部)
14〜17・・・ハーフブリッジ(センサ素子組)
21〜28・・・センサ素子
31〜34・・・ハーフブリッジの中点、
40・・・増幅部
50・・・マイコン
51・・・制御部(出力信号取得手段、補正前回転角度算出手段、位相補正値算出手段、補正手段)
52・・・メモリ部(記憶部)
80・・・モータ
87・・・被検出部
90・・・ステアリングシステム
【技術分野】
【0001】
本発明は、回転部材の回転角度を検出する回転角検出装置、および、これを用いた電動パワーステアリング装置に関する。
【背景技術】
【0002】
従来、回転部材の回転角度を検出する回転角検出装置が知られている。回転角検出装置では、センサ素子から出力される出力信号に基づいて回転角度を算出している。ところで、例えば出力信号がcos信号およびsin信号である場合、回転角度を高精度に検出するためには、センサ素子から出力されるcos信号とsin信号との位相差が90度であることが要求される。そのためには、cos信号を出力するセンサ素子の磁化方向と、sin信号を出力するセンサ素子の磁化方向とが、互いに90度ずれるように実装する必要がある。しかしながら、磁化方向は目視によって確認することができないため、磁化方向が正確に90度ずれるようにセンサ素子を実装することは困難である。そこで、特許文献1では、位相補正前回転角度θから三角関数の近似式を減算することにより、センサ素子の実装ずれを補正し、高精度に回転角度δを算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4194484号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、位相を補正するための三角関数の近似式を算出する際に、外部から正しい回転角度δを測定する必要がある。したがって、特許文献1では、回転角度δを測定するための外部装置が必須であった。また特許文献1では、回転角度の算出に用いる信号数が増えた場合、信号数の組み合わせの数だけ補正に用いる三角関数を記憶する必要があり、メモリ部の容量の増加が懸念される。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の回転角検出装置は、ブリッジ回路部と、出力信号取得手段と、補正前回転角度算出手段と、位相補正値算出手段と、記憶部と、補正手段と、を備える。回路部は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子により構成される複数のセンサ素子組を有する。出力信号取得手段は、複数のセンサ素子組から出力される出力信号をセンサ素子組毎に取得する。すなわち、出力信号取得手段は、複数の出力信号を取得する。ここで、出力信号取得手段により取得される出力信号は、位相の異なる複数の信号を含んでいる。補正前回転角度算出手段は、出力信号取得手段により取得された出力信号に基づき、被検出部の補正前回転角度を算出する。位相補正値算出手段は、出力信号取得手段により取得された出力信号に基づき、出力信号間の位相ずれを補正するための位相補正値を算出する。記憶部は、位相補正値算出手段により算出された位相補正値を記憶する。補正手段は、記憶部に記憶された位相補正値を取得し、取得された位相補正値に基づき、補正前回転角度算出手段により算出された補正前回転角度を補正する。
【0007】
また、位相補正値は、出力信号の組合せ毎に記憶し、出力信号の一部に異常が生じた場合には、異常が生じていない出力信号の組合せに対応した位相補正値を取得し、取得された位相補正値に基づき、補正前回転角度を補正する。
【0008】
これにより、位相補正値に基づいて補正前回転角度を補正するので、高精度に被検出部の回転角度を算出することができる。また、出力信号取得手段により取得された出力信号に基づいて位相ずれを補正するための位相補正値を算出するので、外部からの正しい回転角度の測定が不要である。
【0009】
また、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値に基づき、高精度に被検出部の回転角度を算出することができる。
【0010】
なお、「位相の異なる信号」とは、出力信号間における位相差が所定の値、例えば90度、である信号のことをいう。また、「位相ずれ」とは、例えばセンサ素子の実装ずれ等に起因する出力信号間の位相差の上記所定の値からの「ずれ」のことをいう。
【0011】
請求項2に記載の発明では、出力信号取得手段により取得される出力信号は、cos信号およびsin信号を含む。cos信号とsin信号とは、位相が異なっており、すなわち「位相の異なる信号」に対応している。
【0012】
請求項3に記載の発明では、出力信号取得手段により取得される出力信号は、4以上である。これにより、出力信号の一部に異常が生じた場合でも、被検出部の回転角度の検出を継続することができる。
【0013】
請求項4に記載の発明では、出力信号取得手段により取得される出力信号は、+cos信号、−cos信号、+sin信号、および、−sin信号を含む。なお、+cos信号および−cos信号が「cos信号」に対応し、+sin信号および−sin信号が「sin信号」に対応する。これにより、出力信号の一部に異常が生じた場合でも、+cos信号または−cos信号のいずれか一方、および、+sin信号または−sin信号のいずれか一方が正常であれば、被検出部の回転角度の検出を継続することができる。
【0014】
請求項5に記載の発明では、補正前回転角度算出手段は、+cos信号、−cos信号、+sin信号、および、−sin信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+cos信号、−cos信号、+sin信号、および、−sin信号に基づいて位相補正値を算出する。例えば+cos信号から−cos信号を減算し、+sin信号から−sin信号を減算し、センサ誤差等を消去したcos信号およびsin信号に基づいて補正前回転角度および位相補正値を算出することができるので、より高精度に被検出部の回転角度を算出することができる。
【0015】
請求項6に記載の発明では、補正前回転角度算出手段は、+cos信号または−cos信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+cos信号または−cos信号に基づいて位相補正値を算出する。これにより、+cos信号または−cos信号に異常が生じた場合でも、異常が生じていない+cos信号または−cos信号に基づいて補正前回転角度を算出し、異常が生じていない+cos信号または−cos信号に基づいて算出された位相補正値に基づいて補正前回転角度を補正することにより、高精度に被検出部の回転角度を算出することができる。
【0016】
請求項7に記載の発明では、補正前回転角度算出手段は、+sin信号または−sin信号に基づいて補正前回転角度を算出する。また、位相補正値算出手段は、+sin信号または−sin信号に基づいて位相補正値を算出する。これにより、+sin信号または−sin信号に異常が生じた場合でも、異常が生じていない+sin信号または−sin信号に基づいて補正前回転角度を算出し、異常が生じていない+sin信号または−sin信号に基づいて算出された位相補正値に基づいて補正前回転角度を補正することにより、高精度に被検出部の回転角度を算出することができる。
【0017】
請求項8に記載の発明は、請求項1〜7のいずれか一項に記載された回転角検出装置を用いた電動パワーステアリング装置である。これにより、電動パワーステアリング装置のモータ回転角を高精度に算出することができ、電動パワーステアリング装置の駆動をより精度よく制御することができる。また例えば請求項3〜7の構成を採用すれば、出力信号の一部に異常が生じた場合でも、出力信号間の位相ずれを補正して高精度に回転角度を算出し、電動パワーステアリング装置の駆動を継続することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態によるステアリングシステムの構成を示す模式図である。
【図2】本発明の一実施形態によるモータの構成を示す模式的な断面図である。
【図3】本発明の一実施形態による回転角検出装置の回路構成を示す回路図である。
【図4】本発明の一実施形態によるcos信号およびsin信号を説明する説明図である。
【図5】本発明の一実施形態による位相補正値算出処理を説明するフローチャートである。
【図6】本発明の一実施形態による回転角検出処理を説明するフローチャートである。
【図7】本発明の一実施形態による回転角検出処理を説明するフローチャートである。
【図8】本発明の一実施形態による補正前回転角度θnの算出に係る角度範囲の分割を説明する説明図である。
【図9】本発明の一実施形態による角度νnに基づいて補正前回転角度θnを算出する算出方法を説明する説明図である。
【発明を実施するための形態】
【0019】
以下、本発明による回転角検出装置を図面に基づいて説明する。
【0020】
(一実施形態)
図1に示すように、本発明の一実施形態による回転角検出装置10は、車両のステアリング操作をアシストするための電動パワーステアリング装置1(以下、適宜「EPS」という。)に適用される。
【0021】
図1は、電動パワーステアリング装置1を備えたステアリングシステム90の全体構成を示す図である。ステアリングホイール91に接続されたステアリングシャフト92には、ステアリングセンサ94およびトルクセンサ95が設けられている。ステアリングセンサ94は、ステアリングシャフト92の回転角を検出する。トルクセンサ95は、ステアリングホイール91に加えられた操舵トルクを検出する。ステアリングシャフト92の先端は、ギア96を介してラック軸97に連結されている。ラック軸97の両端には、タイロッド等を介して一対のタイヤ(ホイール)98がそれぞれ連結されている。ステアリングシャフト92の回転運動は、ギア96によってラック軸97の直線運動に変換され、ラック軸97の直線運動変位に応じた角度分、左右のタイヤ98が転舵される。
【0022】
電動パワーステアリング装置1は、補助操舵トルクを発生するモータ80、モータ80の回転角度を検出する回転角検出装置10、及び、モータ80の回転を減速してステアリングシャフト92に伝達するギア89等を備える。モータ80は、ギア89を正逆回転させる三相ブラシレスモータである。電動パワーステアリング装置1は、ステアリングホイール91の操舵方向および操舵トルクに応じた操舵補助トルクをステアリングシャフト92に伝達する。
【0023】
モータ80の概略構成を、図2に示す。モータ80は、ステータ81、ロータ82、および、シャフト83等を有している。ロータ82は、シャフト83とともに回転する筒状の部材であり、その表面に永久磁石が貼り付けられ、磁極を有している。ステータ81は、その内部にロータ82を相対回転可能に収容している。ステータ81は、径内方向へ所定角度毎に突出する突出部を有し、この突出部にコイル84が巻回されている。コイル84への通電によって生じる磁界を受けて、ロータ82はシャフト83とともに回転する。ステータ81、ロータ82、シャフト83、および、コイル84は、ハウジング85に収容される。シャフト83は、ハウジング85の両端から突出し、カバー86側の端部に被検出部87を有する。被検出部87は、円板状に形成される2極磁石であり、シャフト83と一体となって回転する。カバー86の被検出部87と対向する位置には、回転角検出装置10が設けられる。本実施形態では、回転角検出装置10は、カバー86の一箇所に設けられているが、複数箇所に設けるように構成してもよい。回転角検出装置10は、ロータ82およびシャフト83と一体となって回転する被検出部87の回転角度を検出する。
【0024】
回転角検出装置10の回路構成を、図3に示す。図3に示すように、回転角検出装置10は、第1ブリッジ回路11、第2ブリッジ回路12、増幅部40、マイコン50等を有している。なお、第1ブリッジ回路11および第2ブリッジ回路12が「回路部」に対応している。
【0025】
第1ブリッジ回路11は、第1ハーフブリッジ14および第2ハーフブリッジ15を有する。第1ハーフブリッジ14は、2つのセンサ素子21、22から構成される。センサ素子21、22の接続点である中点31は、増幅部40の第1オペアンプ41に接続する。第2ハーフブリッジ15は、2つのセンサ素子23、24から構成される。センサ素子23、24の接続点である中点32は、増幅部40の第2オペアンプ42に接続する。
【0026】
第2ブリッジ回路12は、第3ハーフブリッジ16および第4ハーフブリッジ17を有する。第3ハーフブリッジ16は、2つのセンサ素子25、26から構成される。センサ素子25、26の接続点である中点33は、増幅部40の第3オペアンプ43に接続する。第4ハーフブリッジ17は、2つのセンサ素子27、28から構成される。センサ素子27、28の接続点である中点34は、増幅部40の第4オペアンプ44に接続する。
【0027】
本実施形態のセンサ素子21〜28は、いずれも被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化する磁気抵抗素子である。磁気抵抗素子としては、例えばGMR素子が好適に用いられる。
【0028】
なお、ハーフブリッジ14〜17のそれぞれが「センサ素子組」に対応している。本実施形態では、1つの出力信号を出力するセンサ素子組を便宜上、「ハーフブリッジ」としているが、ブリッジ回路を構成するセンサ素子組は、2組に限定されることはなく、また、センサ素子組を構成するセンサ素子数も2つに限定されることはない。
【0029】
第1ハーフブリッジ14および第3ハーフブリッジ16と、第2ハーフブリッジ15および第4ハーフブリッジ17とは、その磁化方向が概ね90度ずれるようにセンサ素子21〜28が実装されている。本実施形態では、第1ハーフブリッジ14の中点31および第3ハーフブリッジ16の中点33からはcos信号が出力され、第2ハーフブリッジ15の中点32および第4ハーフブリッジ17の中点34からはsin信号が出力される。
【0030】
cos信号を出力する第1ハーフブリッジ14およびsin信号を出力する第2ハーフブリッジ15からなる第1ブリッジ回路11と、cos信号を出力する第3ハーフブリッジ16およびsin信号を出力する第4ハーフブリッジ17からなる第2ブリッジ回路12とは、それぞれ別々の電源に接続されている。これにより、一方のブリッジ回路が故障したとしても、他方のブリッジ回路から出力されるcos信号およびsin信号を用いて被検出部87の回転角度δの算出を継続することができる。
【0031】
増幅部40は、第1オペアンプ41、第2オペアンプ42、第3オペアンプ43、および第4オペアンプ44を有する。
【0032】
第1オペアンプ41は、第1ハーフブリッジ14の中点31から出力される信号を増幅し、+cos信号である出力信号Vx1をマイコン50に出力する。第2オペアンプ42は、第2ハーフブリッジ15の中点32から出力される信号を増幅し、+sin信号である出力信号Vy1をマイコン50に出力する。第3オペアンプ43は、第3ハーフブリッジ16の中点33から出力される信号を増幅し、−cos信号である出力信号Vx2をマイコン50に出力する。第4オペアンプ44は、第4ハーフブリッジ17の中点34から出力される信号を増幅し、−sin信号である出力信号Vy2をマイコン50に出力する。
【0033】
回転角検出装置10の電源電圧Vccが5[V]である場合、増幅部40にて増幅され、マイコン50に出力される4つの出力信号Vx1、Vx2、Vy1、Vy2は、以下の式(1)〜(4)で表される。
【0034】
Vx1= cosδ+2.5 …(1)
Vx2=−cosδ+2.5 …(2)
Vy1= sinδ+2.5 …(3)
Vy2=−sinδ+2.5 …(4)
以下、cos信号である出力信号Vx1、Vx2を、適宜「(+)cos信号Vx1」、「(−)cos信号Vx2」という。同様に、sin信号である出力信号Vy1、Vy2を、適宜「(+)sin信号Vy1」、「(−)sin信号Vy2」という。
【0035】
マイコン50は、制御部51および記憶部としてのメモリ部52を有する。制御部51は、位相補正値算出処理、補正前回転角度算出処理、補正処理等の各種演算処理を実行する。メモリ部52は、制御部51にて算出された位相補正値等を記憶するためのものである。なお、本実施形態においては、ハーフブリッジ14〜17のそれぞれの中点31〜34から出力される出力信号は、いずれも別個に増幅部40にて増幅された後に制御部51に入力されている。すなわち、本実施形態では、制御部51が出力信号を取得する前の段階において、出力信号同士の加算処理或いは差動増幅処理等がなされていない。
【0036】
ここで、cos信号およびsin信号について、図4に基づいて説明する。なお、図4中には、cos信号およびsin信号の1周期分を示した。
【0037】
第1ハーフブリッジ14および第3ハーフブリッジ16の磁化方向と、第2ハーフブリッジ15および第4ハーフブリッジ17の磁化方向とのなす角度が90度となるようにセンサ素子21〜28が配置されているとき、第1ハーフブリッジ14および第3ハーフブリッジ16から出力されるcos信号と、第2ハーフブリッジ15および第4ハーフブリッジ17から出力されるsin信号との位相差は90度となる。しかしながら、磁化方向は目視で確認できないため、第1ハーフブリッジ14および第3ハーフブリッジ16の磁化方向と、第2ハーフブリッジ15および第4ハーフブリッジ17の磁化方向とのなす角度が正確に90度となるように実装することは困難である。そのため、実際には図4に示すように、cos信号とsin信号との位相差は、90±αとなる。以下、cos信号を基準とし、cos信号とsin信号との位相差から90度を減じた差分値αを、「位相ずれ」ということにする。具体的には、cos信号とsin信号との位相差が89度である場合、位相ずれαは−1度であり、cos信号とsin信号との位相差が91度である場合、位相ずれαは+1度であるといった具合である。
【0038】
本実施形態では、位相ずれαを補正するための位相補正値φを、出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出している。
【0039】
ここで、位相補正値φを算出する位相補正値算出処理を図5に示すフローチャートに基づいて説明する。位相補正値算出処理は、図6および図7に示すEPS駆動時に実行される回転角検出処理に先立ち、例えばモータ80に回転角検出装置10を組み付けたときに実施される処理である。
【0040】
最初のステップS11(以下、「ステップ」を省略し、単に記号「S」で示す。)では、4つの出力信号Vx1、Vx2、Vy1、Vy2を取得する。なお、ここで取得される出力信号Vx1、Vx2、Vy1、Vy2は、被検出部87の回転に伴って変化する信号であって、少なくとも1周期分が取得される。被検出部87は、コイル84への通電により回転させてもよいし、手動で回転させてもよい。また、cos信号同士、sin信号同士を減算した値であるcos信号Vx、およびsin信号Vyを算出する。cos信号同士、sin信号同士を減算することにより、温度特性等によるセンサ誤差を消去することができる。cos信号Vx、およびsin信号Vyは、以下の式(5)、(6)で表される。
【0041】
Vx=Vx1−Vx2=2cosδ …(5)
Vy=Vy1−Vy2=2sinδ …(6)
S12では、S11で取得した出力信号Vx1、Vx2、Vy1、Vy2、および、S11で算出したcos信号Vx、sin信号Vyに基づき、位相ずれαを補正するための位相補正値φを算出する。本実施形態では、用いる信号の組み合わせが異なる9つの定数である位相補正値φ0〜φ8が算出される。位相補正値φ0〜φ8の算出方法については、後述する。なお、位相補正値φは、取得される信号数に応じ、信号の組み合わせごとに算出しておくことが望ましい。
【0042】
S13では、S12で算出された位相補正値φ0〜φ8をメモリ部52に記憶し、本処理を終了する。
【0043】
ここで、位相補正値φ0〜φ8の算出方法について説明する。
【0044】
<位相補正値φ0>
位相補正値φ0は、センサ誤差等を消去したcos信号Vxおよびsin信号Vyに基づいて算出される。ここで、cos信号Vxを基準としたときのcos信号Vxとsin信号Vyの位相ずれをα0とすると、cos信号Vxおよびsin信号Vyは、以下のように表される。
【0045】
Vx=2cosδ …(5)
Vy=2sin(δ+α0) …(7)
ここで、式(5)に示すcos信号Vxおよび式(7)に示すsin信号Vyを用いて位相補正値φ0を算出する方法を説明する。
【0046】
まず、cos信号Vxからsin信号Vyを減算した減算値Vs0を算出する。減算値Vs0は、以下の式(8)のように表される。
【0047】
Vs0=Vx−Vy=2cosδ−2sin(δ+α0)
=2{cosδ+cos(δ+90+α0)} …(8)
上記式(8)を和積の公式(9)により変形すると、減算値Vs0は、以下の式(10)のように表される。
【0048】
cosA+cosB=2cos{(A+B)/2}cos{(A−B)/2}
…(9)
Vs0=2{cosδ+cos(δ+90+α0)}
=4cos{(δ+δ+90+α0)/2}
×cos[{δ−(δ+90+α0)}/2]
=4cos(δ+45+α0/2)cos{−(45+α0/2)}
=4cos(δ+45+α0/2)cos(45+α0/2) …(10)
また、cos信号Vxにsin信号Vyを加算した加算値Va0を算出する。加算値Va0は、以下の式(11)のように表される。
【0049】
Va0=Vx+Vy=2cosδ+2sin(δ+α0)
=2{cosδ−cos(δ+90+α0)} …(11)
上記式(11)を和積の公式(12)により変形すると、加算値Va0は、以下の式(13)のように表される。
【0050】
cosA−cosB=−2sin{(A+B)/2}sin{(A−B)/2}
…(12)
Va0=2{cosδ−cos(δ+90+α0)}
=−4sin{(δ+δ+90+α0)/2}
×sin[{δ−(δ+90+α0)}/2]
=−4sin(δ+45+α0/2)sin{−(45+α0/2)}
=4sin(δ+45+α0/2)sin(45+α0/2) …(13)
また、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、以下の式(14)、(15)のように表される。
【0051】
Vs0max=4cos{(45+α0/2)} …(14)
Va0max=4sin{(45+α0/2)} …(15)
なお、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、被検出部87を回転させることにより、定数として取得可能である。
【0052】
ここで、加算値Va0の最大値Va0maxを減算値Vs0の最大値Vs0maxで除した値のarctan(以下、適宜「ATAN」という。)を位相補正値φ0として算出すると、以下の式(16)のように表される。
【0053】
φ0=ATAN(Va0max/Vs0max)
=ATAN[4sin{(45+α0/2)}/4cos{(45+α0/2)}]
=45+α0/2 …(16)
上述の通り、減算値Vs0の最大値Vs0max、および、加算値Va0の最大値Va0maxは、定数であるので、位相補正値φ0も定数として算出される。
【0054】
ここまでは、cos信号Vxおよびsin信号Vyを用いて位相補正値φ0を算出する方法について説明したが、他のcos信号およびsin信号を用いた場合についても、式(8)〜(16)にて説明したのと同様にして、位相補正値φ1〜φ8を求めることができる。以下、位相補正値φ1〜φ8について言及しておく。
【0055】
<位相補正値φ1>
位相補正値φ1は、−cos信号Vx2およびsin信号Vyに基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα1とすると、−cos信号Vx2およびsin信号Vyは、以下のように表される。なお、−cos信号Vx2については、制御部51内でオフセット値を消去し、+cos信号に換算した値−Vx2aを用いる。
【0056】
Vx2a=−cosδ
−Vx2a=cosδ …(17)
Vy=2sin(δ+α1) …(18)
ここで、cos信号−Vx2aからsin信号Vyを減算した減算値Vs1を算出する。なおここでは、cos信号−Vx2aとsin信号Vyとの振幅を合わせるため、cos信号−Vx2aを2倍しているが、sin信号であるVyを1/2倍してもよい。以下の例でも同様である。
【0057】
Vs1=−2Vx2a−Vy=2cosδ−2sin(δ+α1)
=2{cosδ+cos(δ+90+α1)} …(19)
上記式(19)を和積の公式にて変形すると、減算値Vs1は、式(20)のように表される。
【0058】
Vs1=4cos(δ+45+α1/2)cos(45+α1/2) …(20)
また、振幅を合わせたうえで、cos信号−Vx2aにsin信号Vyを加算した加算値Va1は、以下の式(21)のように表される。
【0059】
Va1=−2Vx2a+Vy=2cosδ+2sin(δ+α1)
=2{cosδ−cos(δ+90+α1)} …(21)
上記式(21)を和積の公式にて変形すると、加算値Va1は、式(22)のように表される。
【0060】
Va1=4sin(δ+45+α1/2)sin(45+α1/2) …(22)
また、減算値Vs1の最大値Vs1max、および、加算値Va1の最大値Va1maxは、以下の式(23)、(24)のように表される。
【0061】
Vs1max=4cos(45+α1/2) …(23)
Va1max=4sin(45+α1/2) …(24)
加算値Va1の最大値Va1maxを減算値Vs1の最大値Vs1maxで除した値のarctanを位相補正値φ1として算出すると、以下の式(25)のように表される。
【0062】
φ1=ATAN(Va1max/Vs1max)=45+α1/2 …(25)
<位相補正値φ2>
位相補正値φ2は、+cos信号Vx1およびsin信号Vyに基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα2とすると、+cos信号Vx1およびsin信号Vyは、以下のように表される。なお、+cos信号Vx1については、制御部51内でオフセット値を消去した値Vx1aを用いる。
【0063】
Vx1a=cosδ …(26)
Vy=2sin(δ+α2) …(27)
ここで、振幅を合わせたうえで、+cos信号Vx1aからsin信号Vyを減算した減算値Vs2は、
Vs2=2Vx1a−Vy=2cosδ−2sin(δ+α2)
=2{cosδ+cos(δ+90+α2)} …(28)
となる。上記式(28)を和積の公式にて変形すると、減算値Vs2は、式(29)のように表される。
【0064】
Vs2=4cos(δ+45+α2/2)cos(45+α2/2) …(29)
また、振幅を合わせたうえで、+cos信号Vx1aにsin信号Vyを加算した加算値Va2は、
Va2=2Vx1a+Vy=2cosδ+2sin(δ+α2)
=2{cosδ−cos(δ+90+α2)} …(30)
となる。上記式(30)を和積の公式にて変形すると、加算値Va2は、式(31)のように表される。
【0065】
Va2=4sin(δ+45+α2/2)sin(45+α2/2) …(31)
また、減算値Vs2の最大値Vs2max、および、加算値Va2の最大値Va2maxは、以下の式(32)、(33)のように表される。
【0066】
Vs2max=4cos(45+α2/2) …(32)
Va2max=4sin(45+α2/2) …(33)
加算値Va2の最大値Va2maxを減算値Vs2の最大値Vs2maxで除した値のarctanを位相補正値φ2として算出すると、以下の式(34)のように表される。
【0067】
φ2=ATAN(Va2max/Vs2max)=45+α2/2 …(34)
<位相補正値φ3>
位相補正値φ3は、cos信号Vxおよび−sin信号Vy2に基づいて算出される。ここで、cos信号Vxを基準としたときの位相ずれをα3とすると、cos信号Vxおよび−sin信号Vy2は、以下のように表される。なお、−sin信号Vy2については、制御部51内でオフセット値を消去し、+sin信号に換算した値−Vy2aを用いる。
【0068】
Vx=2cosδ …(5)
Vy2a=−sin(δ+α3)
−Vy2a=sin(δ+α3) …(35)
ここで、振幅を合わせたうえで、cos信号Vxからsin信号−Vy2aを減算した減算値Vs3は、
Vs3=Vx−(−2Vy2a)=2cosδ−2sin(δ+α3)
=2{cosδ+cos(δ+90+α3)} …(36)
となる。上記式(36)を和積の公式にて変形すると、減算値Vs3は、式(37)のように表される。
【0069】
Vs3=4cos(δ+45+α3/2)cos(45+α3/2) …(37)
また、振幅を合わせたうえで、cos信号Vxにsin信号−Vy2aを加算した加算値Va3は、
Va3=Vx+(−2Vy2a)=2cosδ+2sin(δ+α3)
=2{cosδ−cos(δ+90+α3)} …(38)
となる。上記式(38)を和積の公式にて変形すると、加算値Va3は、式(39)のように表される。
【0070】
Va3=4sin(δ+45+α3/2)sin(45+α3/2) …(39)
また、減算値Vs3の最大値Vs3max、および、加算値Va3の最大値Va3maxは、以下の式(40)、(41)のように表される。
【0071】
Vs3max=4cos(45+α3/2) …(40)
Va3max=4sin(45+α3/2) …(41)
加算値Va3の最大値Va3maxを減算値Vs3の最大値Vs3maxで除した値のarctanを位相補正値φ3として算出すると、以下の式(42)のように表される。
【0072】
φ3=ATAN(Va3max/Vs3max)=45+α3/2 …(42)
<位相補正値φ4>
位相補正値φ4は、cos信号Vxおよび+sin信号Vy1に基づいて算出される。ここで、cos信号Vxを基準としたときの位相ずれをα4とすると、cos信号Vxおよび+sin信号Vy1は、以下のように表される。なお、+sin信号Vy1については、制御部51内でオフセット値を消去した値Vy1aを用いる。
【0073】
Vx=2cosδ …(5)
Vy1a=sin(δ+α4) …(43)
ここで、振幅を合わせたうえで、cos信号Vxから+sin信号Vy1aを減算した減算値Vs4は、
Vs4=Vx−2Vy1a=2cosδ−2sin(δ+α4)
=2{cosδ+cos(δ+90+α4)} …(44)
となる。上記式(44)を和積の公式にて変形すると、減算値Vs4は、式(45)のように表される。
【0074】
Vs4=4cos(δ+45+α4/2)cos(45+α4/2) …(45)
また、振幅を合わせたうえで、cos信号Vxに+sin信号Vy1aを加算した加算値Va4は、
Va4=Vx+2Vy1a=2cosδ+2sin(δ+α4)
=2{cosδ−cos(δ+90+α4)} …(46)
となる。上記式(46)を和積の公式にて変形すると、加算値Va4は、式(47)のように表される。
【0075】
Va4=4sin(δ+45+α4/2)sin(45+α4/2) …(47)
ここで、減算値Vs4の最大値Vs4max、および、加算値Va4の最大値Va4maxは、以下の式(48)、(49)で表される。
【0076】
Vs4max=4cos(45+α4/2) …(48)
Va4max=4sin(45+α4/2) …(49)
加算値Va4の最大値Va4maxを減算値Vs4の最大値Vs4maxで除した値のarctanを位相補正値φ4として算出すると、以下の式(50)のように表される。
【0077】
φ4=ATAN(Va4max/Vs4max)=45+α4/2 …(50)
<位相補正値φ5>
位相補正値φ5は、−cos信号Vx2および−sin信号Vy2に基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα5とすると、−cos信号Vx2および−sin信号Vy2は、以下のように表される。なお、−cos信号Vx2および−sin信号Vy2については、制御部51内でオフセットを消去し、+cos信号または+sin信号に換算した値−Vx2a、−Vy2aを用いる。
【0078】
Vx2a=−cosδ
−Vx2a=cosδ …(51)
Vy2a=−sin(δ+α5)
−Vy2a=sin(δ+α5) …(52)
ここで、cos信号−Vx2aからsin信号−Vy2aを減算した減算値Vs5は、
Vs5=−Vx2a−(−Vy2a)=cosδ−sin(δ+α5)
=cosδ+cos(δ+90+α5) …(53)
となる。上記式(53)を和積の公式にて変形すると、減算値Vs5は、式(54)のように表される。
【0079】
Vs5=2cos(δ+45+α5/2)cos(45+α5/2) …(54)
また、cos信号−Vx2aにsin信号−Vy2aを加算した加算値Va5は、
Va5=−Vx2a+(−Vy2a)=cosδ+sin(δ+α5)
=cosδ−cos(δ+90+α5) …(55)
となる。上記式(55)を和積の公式にて変形すると、加算値Va5は、式(56)のように表される。
【0080】
Va5=2sin(δ+45+α5/2)sin(45+α5/2) …(56)
ここで、減算値Vs5の最大値Vs5max、および、加算値Va5の最大値Va5maxは、以下の式(57)、(58)で表される。
【0081】
Vs5max=2cos(45+α5/2) …(57)
Va5max=2sin(45+α5/2) …(58)
加算値Va5の最大値Va5maxを減算値Vs5の最大値Vs5maxで除した値のarctanを位相補正値φ5として算出すると、以下の式(58)のように表される。
【0082】
φ5=ATAN(Va5max/Vs5max)=45+α5/2 …(59)
<位相補正値φ6>
位相補正値φ6は、−cos信号Vx2および+sin信号Vy1に基づいて算出される。ここで、−cos信号Vx2を基準としたときの位相ずれをα6とすると、−cos信号Vx2および+sin信号Vy1は、以下のように表される。なお、−cos信号Vx2および+sin信号Vy1については制御部51内でオフセットを除去し、−cos信号Vx2については+cos信号に換算した値−Vx2a、Vy1aを用いる。
【0083】
Vx2a=−cosδ
−Vx2a=cosδ …(60)
Vy1a=sin(δ+α6) …(61)
ここで、cos信号−Vx2aから+sin信号Vy1aを減算した減算値Vs6は、
Vs6=−Vx2a−Vy1a=cosδ−sin(δ+α6)
=cosδ+cos(δ+90+α6)} …(62)
となる。上記式(62)を和積の公式にて変形すると、減算値Vs6は、式(63)のように表される。
【0084】
Vs6=2cos(δ+45+α6/2)cos(45+α6/2) …(63)
また、cos信号−Vx2aに+sin信号Vy1aを加算した加算値Va6は、
Va6=−Vx2a+Vy1a=cosδ+sin(δ+α6)
=cosδ−cos(δ+90+α6) …(64)
となる。上記式(64)を和積の公式にて変形すると、加算値Va6は、式(65)のように表される。
【0085】
Va6=2sin(δ+45+α6/2)sin(45+α6/2) …(65)
ここで、減算値Vs6の最大値Vs6max、および、加算値Va6の最大値Va6maxは、以下の式(66)、(67)のように表される。
【0086】
Vs6max=2cos(45+α6/2) …(66)
Va6max=2sin(45+α6/2) …(67)
加算値Va6の最大値Va6maxを減算値Vs6の最大値Vs6maxで除した値のarctanを位相補正値φ6として算出すると、以下の式(68)のように表される。
【0087】
φ6=ATAN(Va6max/Vs6max)=45+α6/2 …(68)
<位相補正値φ7>
位相補正値φ7は、+cos信号Vx1および−sin信号Vy2に基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα7とすると、+cos信号Vx1および−sin信号Vy2は、以下のように表される。なお、+cos信号Vx1および−sin信号Vy2については制御部51内でオフセットを除去し、−sin信号Vy2については+sin信号に換算した値Vx1a、−Vy2aを用いる。
【0088】
Vx1a=cosδ …(69)
Vy2a=−sin(δ+α7)
−Vy2a=sin(δ+α7) …(70)
ここで、+cos信号Vx1aからsin信号−Vy2aを減算した減算値Vs7は、
Vs7=Vx1a−(−Vy2a)=cosδ−sin(δ+α7)
=cosδ+cos(δ+90+α7) …(71)
となる。上記式(71)を和積の公式にて変形すると、減算値Vs7は、式(72)のように表される。
【0089】
Vs7=2cos(δ+45+α7/2)cos(45+α7/2) …(72)
また、+cos信号Vx1aにsin信号−Vy2aを加算した加算値Va7は、
Va7=Vx1a+(−Vy2a)=cosδ+sin(δ+α7)
=cosδ−cos(δ+90+α7) …(73)
となる。上記式(73)を和積の公式にて変形すると、加算値Va7は、式(74)のように表される。
【0090】
Va7=2sin(δ+45+α7/2)sin(45+α7/2) …(74)
ここで、減算値Vs7の最大値Vs7max、および、加算値Va7の最大値Va7maxは、以下の式(75)、(76)で表される。
【0091】
Vs7max=2cos(45+α7/2) …(75)
Va7max=2sin(45+α7/2) …(76)
加算値Va7の最大値Va7maxを減算値Vs7の最大値Vs7maxで除した値のarctanを位相補正値φ7として算出すると、以下の式(77)のように表される。
【0092】
φ7=ATAN(Va7max/Vs6max)=45+α7/2 …(77)
<位相補正値φ8>
位相補正値φ8は、+cos信号Vx1および+sin信号Vy1に基づいて算出される。ここで、+cos信号Vx1を基準としたときの位相ずれをα8とすると、+cos信号Vx1および+sin信号Vy1は、以下のように表される。なお、+cos信号Vx1および+sin信号Vy1については、制御部51内でオフセットを除去した値Vx1a、Vy1aを用いる。
【0093】
Vx1a=cosδ …(78)
Vy1a=sin(δ+α8) …(79)
ここで、+cos信号Vx1aから+sin信号Vy1aを減算した減算値Vs8は、
Vs8=Vx1a−Vy1a=cosδ−sin(δ+α8)
=cosδ+cos(δ+90+α8) …(80)
となる。上記式(80)を和積の公式にて変形すると、減算値Vs8は、式(81)のように表される。
【0094】
Vs8=2cos(δ+45+α8/2)cos(45+α8/2) …(81)
また、+cos信号Vx1aに+sin信号Vy1aを加算した加算値Va8は、
Va8=Vx1a+Vy1a=cosδ+sin(δ+α8)
=cosδ−cos(δ+90+α8) …(82)
となる。上記式(82)を和積の公式にて変形すると、加算値Va8は、式(83)のように表される。
【0095】
Va8=2sin(δ+45+α8/2)sin(45+α8/2) …(83)
ここで、減算値Vs8の最大値Vs8max、および、加算値Va8の最大値Va8maxは、以下の式(84)、(85)で表される。
【0096】
Vs8max=2cos(45+α8/2) …(84)
Va8max=2sin(45+α8/2) …(85)
加算値Va8の最大値Va8maxを減算値Vs8の最大値Vs8maxで除した値のarctanを位相補正値φ8として算出すると、以下の式(86)のように表される。
【0097】
φ8=ATAN(Va8max/Vs8max)=45+α8/2 …(86)
このように算出された位相補正値φ0〜φ8は、いずれも定数であり、算出された位相補正値φ0〜φ8は、メモリ部52に記憶される(図5中のS13)。
【0098】
次に、被検出部87の回転角度を検出する回転角検出処理を図6および図7に示すフローチャートに基づいて説明する。図6および図7に示す回転角検出処理は、EPS動作時に所定の間隔、例えば200μsごと、に制御部51にて実行される処理である。
【0099】
図6中のS101では、4つの出力信号Vx1、Vx2、Vy1、Vy2を取得する。また、cos信号同士、sin信号同士を減算した値であるcos信号Vx、およびsin信号Vyを算出する(式(1)〜式(6)参照)。
【0100】
S102では、S101にて取得された4つの出力信号Vx1、Vx2、Vy1、Vy2に異常が生じているか判定するとともに、異常が生じている出力信号を特定する。異常が生じている出力信号の特定は、公知の方法で行うことができるが、例えば所定の上限値を上回った場合、または所定の下限値を下回った場合、当該出力信号に異常が生じていると特定することができる。
【0101】
S103では、全ての出力信号が正常であるか否かを判断する。少なくとも1つの出力信号に異常が生じている場合(S103:NO)、S106へ移行する。全ての出力信号が正常である場合(S103:YES)、S104へ移行する。
【0102】
S104では、全ての出力信号が正常であるので、cos信号Vxおよびsin信号Vyに基づいて補正前回転角度θ0を算出する。
【0103】
ここで、補正前回転角度θnの算出方法について説明する。補正前回転角度θnは、図6および図7に示す回転角検出処理におけるステップにて、位相補正値φ0〜φ8に対応して算出される。具体的には、位相補正値φ0の算出に用いた出力信号および当該出力信号を用いて算出された演算値から補正前回転角度θ0が算出される、といった具合である。
【0104】
まず、補正前回転角度θnの算出に先立ち、位相補正値φ0〜φ8の算出に用いた減算値Vsn、加算値Van、減算値Vsnの最大値Vsnmax、および、加算値Vanの最大値Vanmaxを用い、振幅を合わせるべく、減算値Vsnを減算値Vsnの最大値Vsnmaxで除した値Vsdn、および、加算値Vanを加算値Vanの最大値Vanmaxで除した値Vadnを算出する。
【0105】
Vsdn=Vsn/Vsnmax=cos(δ+45+αn/2) …(87)
Vadn=Van/Vanmax=sin(δ+45+αn/2) …(88)
なお、VsdnおよびVadnは、具体的には、Vsd0がVs0をVs0maxで除して算出され、Vad0がVa0をVa0maxで除して算出される、といった具合であり、本実施形態ではn=0〜8である。
【0106】
次に、VsdnおよびVadnを用いて算出されるarctanである角度γnから補正前回転角度θnを算出する方法について、図8および図9に基づいて説明する。図8は、補正前回転角度θnの算出に係る角度範囲の分割を説明する図であって、sin信号およびcos信号を説明する図である。図8におけるsin信号はVadnであり、cos信号はVsdnである。図9は、角度γnに基づいて補正前回転角度θnを算出する算出方法を説明する図である。
【0107】
補正前回転角度θnは、VsdnおよびVadnを用いて算出されるarctanである角度γn(ただしn=0〜8)に基づいて算出される。角度γnは、式(89)、(90)のように表される。
【0108】
γn=ATAN(Vadn/Vsdn) …(89)
γn=ATAN(Vsdn/Vadn) …(90)
式(89)および式(90)に示したように、角度γnは、sin信号であるVadnをcos信号であるVsdnで除した値(以下、「tan値」という。)、または、cos信号であるVsdnをsin信号であるVadnで除した値(以下、「cot値」という。)のarctanとして算出される。VadnおよびVsdnは、0となる角度があるため、0で除することを避けるため、sin信号であるVadnが0となる角度を含む角度範囲においては、cos信号で除するtan値に基づいて角度γnを算出し、cos信号であるVsdnが0となる角度を含む角度範囲においては、sin信号で除するcot値に基づいて角度γnを算出する。なお、VadnまたはVsdnが−信号である場合、例えば−1等を乗じることにより、+信号に変換してからtan値およびcot値を算出する。
【0109】
また、補正前回転角度θnを0〜360度とすると、異なる補正前回転角度θnでtan値またはcot値が同じになる場合があるので、Vadnの絶対値とVsdnの絶対値との大小関係、Vadnの符号、およびVsdnの符号に基づき、補正前回転角度θnの角度範囲を特定したうえで、tan値またはcot値のarctanに基づき、補正前回転角度θnを算出する。
【0110】
具体的には、図8および図9に示すように、Vadnの絶対値とVsdnの絶対値との大小関係、Vadnの符号、およびVsdnの符号に基づき、補正前回転角度θnの0〜360度を8つの角度範囲であるエリア1〜エリア8のどこに該当するかを特定する。そして、Vadnの絶対値とVsdnの絶対値とを比較し、絶対値の大きい方が分母となるようにtan値またはcot値を用い、tan値またはcot値のarctanである角度γnを算出する。なお、図9中の「γの算出方法」においては、γの算出に係り、tan値またはcot値のどちらを用いてarctanを求めているかを示している。補正前回転角度θnの角度範囲が特定されているので、図9に示すように、基準となる0度(=360度)、90度、180度、または270度に算出された角度γnを加算または減算することにより、補正前回転角度θnを算出する。
【0111】
また、補正前回転角度θnは、以下の式(91)のように表される。
【0112】
θn=δ+45+αn/2 …(91)
図6に戻り、上述のS104では、Vad0およびVsd0に基づくtan値またはcot値のarctanである角度γ0から算出される補正前回転角度θ0は、以下の式(92)のように表される。
【0113】
θ0=δ+45+α0/2 …(92)
S105では、cos信号Vxおよびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ0を取得する。そして取得した位相補正値φ0に基づき、S104で算出した補正前回転角度θ0を補正する。具体的には、補正前回転角度θ0から位相補正値φ0を減算することにより、式(93)に示すように、被検出部87の回転角度δを算出することができる。
【0114】
θ0−φ0=(δ+45+α0/2)−(45+α0/2)=δ …(93)
少なくとも1つの出力信号に異常が生じている場合(S103:NO)に移行するS106では、+cos信号Vx1のみに異常が生じているか否かを判断する。+cos信号Vx1に異常が生じていない場合、または、+cos信号Vx1の異常に加え他の出力信号にも異常が生じている場合(S106:NO)、S109へ移行する。+cos信号Vx1のみに異常が生じている場合(S106:YES)、S107へ移行する。
【0115】
S107では、+cos信号Vx1のみに異常が生じているので、異常が生じていない−cos信号Vx2、および、sin信号同士を減算してセンサ誤差等を消去したsin信号Vyに基づいて補正前回転角度θ1を算出する。Vad1およびVsd1に基づくtan値またはcot値のarctanである角度γ1から算出される補正前回転角度θ1は、以下の式(94)のように表される。
【0116】
θ1=δ+45+α1/2 …(94)
S108では、−cos信号Vx2およびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ1を取得する。そして取得した位相補正値φ1に基づき、S107で算出した補正前回転角度θ1を補正する。具体的には、補正前回転角度θ1から位相補正値φ1を減算することにより、式(95)に示すように、被検出部87の回転角度δを算出することができる。
【0117】
θ1−φ1=(δ+45+α1/2)−(45+α1/2)=δ …(95)
+cos信号Vx1に異常が生じていない場合、または、+cos信号Vx1の異常に加え他の出力信号にも異常が生じている場合(S106:NO)に移行するS109では、−cos信号Vx2のみに異常が生じているか否かを判断する。−cos信号Vx2に異常が生じていない場合、または、−cos信号Vx2の異常に加え他の出力信号にも異常が生じている場合(S109:NO)、S112へ移行する。−cos信号Vx2のみに異常が生じている場合(S109:YES)、S110へ移行する。
【0118】
S110では、−cos信号Vx2のみに異常が生じているので、異常が生じていない+cos信号Vx1、および、sin信号同士を減算してセンサ誤差等を消去したsin信号Vyに基づいて補正前回転角度θ2を算出する。Vad2およびVsd2に基づくtan値またはcot値のarctanである角度γ2から算出される補正前回転角度θ2は、以下の式(96)のように表される。
【0119】
θ2=δ+45+α2/2 …(96)
S111では、+cos信号Vx1およびsin信号Vyに基づいて算出され、メモリ部52に記憶されている位相補正値φ2を取得する。そして取得した位相補正値φ2に基づき、S110で算出した補正前回転角度θ2を補正する。具体的には、補正前回転角度θ2から位相補正値φ2を減算することにより、式(97)に示すように、被検出部87の回転角度δを算出することができる。
【0120】
θ2−φ2=(δ+45+α2/2)−(45+α2/2)=δ …(97)
−cos信号Vx2に異常が生じていない場合、または、−cos信号Vx2の異常に加え他の出力信号にも異常が生じている場合(S109:NO)に移行するS112では、+sin信号Vy1のみに異常が生じているか否かを判断する。+sin信号Vy1に異常が生じていない場合、または、+sin信号Vy1の異常に加え他の出力信号にも異常が生じている場合(S112:NO)、S115へ移行する。+sin信号Vy1のみに異常が生じている場合(S112:YES)、S113へ移行する。
【0121】
S113では、+sin信号Vy1のみに異常が生じているので、異常が生じていない−sin信号Vy2、および、cos信号同士を減算してセンサ誤差等を消去したcos信号Vxに基づいて補正前回転角度θ3を算出する。Vad3およびVsd3に基づくtan値またはcot値のarctanである角度γ3から算出される補正前回転角度θ3は、以下の式(98)のように表される。
【0122】
θ3=δ+45+α3/2 …(98)
S114では、cos信号Vxおよび−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ3を取得する。そして取得した位相補正値φ3に基づき、S113で算出した補正前回転角度θ3を補正する。具体的には、補正前回転角度θ3から位相補正値φ3を減算することにより、式(99)に示すように、被検出部87の回転角度δを算出することができる。
【0123】
θ3−φ3=(δ+45+α3/2)−(45+α3/2)=δ …(99)
+sin信号Vy1に異常が生じていない場合、または、+sin信号Vy1の異常に加え他の出力信号にも異常が生じている場合(S112:NO)に移行するS115では、−sin信号Vy2のみに異常が生じているか否かを判断する。−sin信号Vy2に異常が生じていない場合、または、−sin信号Vy2の異常に加え他の出力信号にも異常が生じている場合(S115:NO)、図7中のS118へ移行する。なお、このS115にて否定判断される場合、少なくとも2つの出力信号に異常が生じている。−sin信号Vy2のみに異常が生じている場合(S115:YES)、S116へ移行する。
【0124】
S116では、−sin信号Vy2のみに異常が生じているので、異常が生じていない+sin信号Vy1、および、cos信号同士を減算してセンサ誤差等を消去したcos信号Vxに基づいて補正前回転角度θ4を算出する。Vad4およびVsd4に基づくtan値またはcot値のarctanである角度γ4から算出される補正前回転角度θ4は、以下の式(100)のように表される。
【0125】
θ4=δ+45+α4/2 …(100)
S117では、cos信号Vxおよび+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ4を取得する。そして取得した位相補正値φ4に基づき、S116で算出した補正前回転角度θ4を補正する。具体的には、補正前回転角度θ4から位相補正値φ4を減算することにより、式(101)に示すように、被検出部87の回転角度δを算出することができる。
【0126】
θ4−φ4=(δ+45+α4/2)−(45+α4/2)=δ …(101)
図5に示すように、少なくとも2つの出力信号に異常が生じている場合(S103:NO、S106:NO、S109:NO、S112:NO、かつS115:NO)に移行するS118では、出力信号Vx1、Vy1のみに異常が生じているか否かを判断する。出力信号Vx1、Vy1以外の出力信号に異常が生じている場合(S118:NO)、S121へ移行する。出力信号Vx1、Vy1のみに異常が生じている場合(S118:YES)、S119へ移行する。
【0127】
S119では、異常が生じていない−cos信号Vx2および−sin信号Vy2に基づいて補正前回転角度θ5を算出する。Vad5およびVsd5に基づくtan値またはcot値のarctanである角度γ5から算出される補正前回転角度θ5は、以下の式(102)のように表される。
【0128】
θ5=δ+45+α5/2 …(102)
S120では、−cos信号Vx2および−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ5を取得する。そして取得した位相補正値φ5に基づき、S119で算出した補正前回転角度θ5を補正する。具体的には、補正前回転角度θ5から位相補正値φ5を減算することにより、式(103)に示すように、被検出部87の回転角度δを算出することができる。
【0129】
θ5−φ5=(δ+45+α5/2)−(45+α5/2)=δ …(103)
出力信号Vx1、Vy1以外の出力信号に異常が生じている場合(S118:NO)に移行するS121では、出力信号Vx1、Vy2のみに異常が生じているか否かを判断する。出力信号Vx1、Vy2以外の出力信号に異常が生じている場合(S121:NO)、S124へ移行する。出力信号Vx1、Vy2のみに異常が生じている場合(S121:YES)、S122へ移行する。
【0130】
S122では、異常が生じていない−cos信号Vx2および+sin信号Vy1に基づいて補正前回転角度θ6を算出する。Vad6およびVsd6に基づくtan値またはcot値のarctanである角度γ6から算出される補正前回転角度θ6は、以下の式(104)のように表される。
【0131】
θ6=δ+45+α6/2 …(104)
S123では、−cos信号Vx2および+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ6を取得する。そして取得した位相補正値φ6に基づき、S122で算出した補正前回転角度θ6を補正する。具体的には、補正前回転角度θ6から位相補正値φ6を減算することにより、式(105)に示すように、被検出部87の回転角度δを算出することができる。
【0132】
θ6−φ6=(δ+45+α6/2)−(45+α6/2)=δ …(105)
出力信号Vx1、Vy2以外の出力信号に異常が生じている場合(S121:NO)に移行するS124では、出力信号Vx2、Vy1のみに異常が生じているか否かを判断する。出力信号Vx2、Vy1以外の出力信号に異常が生じている場合(S124:NO)、S127へ移行する。出力信号Vx2、Vy1のみに異常が生じている場合(S124:YES)、S125へ移行する。
【0133】
S125では、異常が生じていない+cos信号Vx1および−sin信号Vy2に基づいて補正前回転角度θ7を算出する。Vad7およびVsd7に基づくtan値またはcot値のarctanである角度γ7から算出される補正前回転角度θ7は、以下の式(106)のように表される。
【0134】
θ7=δ+45+α7/2 …(106)
S126では、+cos信号Vx1および−sin信号Vy2に基づいて算出され、メモリ部52に記憶されている位相補正値φ7を取得する。そして、取得した位相補正値φ7に基づき、S125で算出した補正前回転角度θ7を補正する。具体的には、補正前回転角度θ7から位相補正値φ7を減算することにより、式(107)に示すように、被検出部87の回転角度δを算出することができる。
【0135】
θ7−φ7=(δ+45+α7/2)−(45+α7/2)=δ …(107)
出力信号Vx2、Vy1以外の出力信号に異常が生じている場合(S124:NO)に移行するS127では、出力信号Vx2、Vy2のみに異常が生じているか否かを判断する。
出力信号Vx2、Vy2以外の出力信号に異常が生じている場合(S127:NO)、S130へ移行する。出力信号Vx2、Vy2のみに異常が生じている場合(S127:YES)、S128へ移行する。
【0136】
S128では、異常が生じていない+cos信号Vx1および+sin信号Vy1に基づいて補正前回転角度θ8を算出する。Vad8およびVsd8に基づくtan値またはcot値のarctanである角度γ8から算出される補正前回転角度θ8は、以下の式(108)のように表される。
【0137】
θ8=δ+45+α8/2 …(108)
S129では、+cos信号Vx1および+sin信号Vy1に基づいて算出され、メモリ部52に記憶されている位相補正値φ8を取得する。そして、取得した位相補正値φ8に基づき、S128で算出した補正前回転角度θ8を補正する。具体的には、補正前回転角度θ8から位相補正値φ8を減算することにより、式(109)に示すように、被検出部87の回転角度δを算出することができる。
【0138】
θ8−φ8=(δ+45+α8/2)−(45+α8/2)=δ …(109)
出力信号Vx2、Vy2以外の出力信号に異常が生じている場合(S127:NO)に移行するS130では、全てのcos信号、全てのsin信号、または全てのcos信号およびsin信号に異常が生じているので、角度検出を終了する。
【0139】
なお、S105、S108、S111、S114、S117、S120、S123、S126、またはS129で算出された回転角度δは、モータ80の駆動制御に用いられる。
【0140】
以上詳述したように、回転角検出装置10の制御部51は、ハーフブリッジ14〜17の中点から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する(図5中のS11および図6中のS101)。取得される出力信号Vx1、Vx2と、Vy1、Vy2とは、位相が異なっている。制御部51は、出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の補正前回転角度θ0〜θ8を算出する(図6中のS104、S107、S110、S113、S116、図7中のS119、S122、S125、S128)。制御部51は、出力信号Vx1、Vx2、Vy1、Vy2に基づき、位相補正値φ0〜φ8を算出する(図5中のS12)。算出された位相補正値φ0〜φ8は、メモリ部52に記憶される(S13)。そして制御部51は、メモリ部52に記憶された位相補正値φ0〜φ8を取得し、取得された位相補正値φ0〜φ8に基づき、補正前回転角度θ0〜θ8を補正し、被検出部87の回転角度δを算出する(図6中のS105、S108、S111、S114、S117、図7中のS120、S123、S126、S129)。これにより、位相補正値φ0〜φ8に基づいて補正前回転角度θ0〜θ8を補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部87の回転角度δを算出することができる。また、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて位相補正値φ0〜φ8を算出するので、外部からの正しい回転角度の測定が不要である。(請求項1)
【0141】
また、本実施形態の出力信号は、cos信号とsin信号とを含んでいる。また、4つの出力信号Vx1、Vx2、Vy1、Vy2が取得される。これにより、出力信号Vx1、Vx2、Vy1、Vy2の一部に異常が生じた場合でも、被検出部87の回転角度δの検出を継続することができる。さらにまた、出力信号Vx1が+cos信号であり、出力信号Vx2が−cos信号であり、出力信号Vy1が+sin信号であり、出力信号Vy2が−sin信号である。これにより、出力信号の一部に異常が生じた場合でも、+cos信号Vx1または−cos信号Vx2のいずれか一方、および、+sin信号Vy1または−sin信号Vy2のいずれか一方が正常であれば、被検出部87の回転角度δの検出を継続することができる。(請求項2〜4)
【0142】
本実施形態では、全ての出力信号Vx1、Vx2、Vy1、Vy2が正常である場合(S103:YES)、+cos信号Vx1および−cos信号Vx2から算出されるcos信号Vxと、+sin信号Vy1および−sin信号Vy2から算出されるsin信号Vyとに基づいて補正前回転角度θ0を算出する(S104)。また、制御部51は、+cos信号Vx1および−cos信号Vx2から算出されるcos信号Vxと、+sin信号Vy1および−sin信号Vy2から算出されるsin信号Vyとに基づいて位相補正値φ0を算出する。そして、位相補正値φ0に基づいて補正前回転角度θ0を補正し、被検出部87の回転角度δを算出する(S105)。これにより、センサ誤差等を消去したcos信号Vxおよびsin信号Vyに基づいて補正前回転角度θ0および位相補正値φ0を算出することができるので、より高精度に被検出部87の回転角度δを算出することができる。(請求項5)
【0143】
+cos信号Vx1のみに異常が生じている場合(S106:YES)、−cos信号Vx2に基づいて補正前回転角度θ1を算出し(S107)、−cos信号Vx2に基づいて算出された位相補正値φ1に基づいて補正前回転角度θ1を補正し、被検出部87の回転角度δを算出する(S108)。
【0144】
また、−cos信号Vx2のみに異常が生じている場合(S109:YES)、+cos信号Vx1に基づいて補正前回転角度θ2を算出し(S110)、+cos信号Vx1に基づいて算出された位相補正値φ2に基づいて補正前回転角度θ2を補正し、被検出部87の回転角度δを算出する(S111)。
【0145】
これにより、+cos信号または−cos信号に異常が生じている場合でも、異常が生じていない+cos信号または−cos信号に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項6)
+sin信号Vy1のみに異常が生じている場合(S112:YES)、−sin信号Vy2に基づいて補正前回転角度θ3を算出し(S113)、−sin信号Vy2に基づいて算出された位相補正値φ3に基づいて補正前回転角度θ3を補正し、被検出部87の回転角度δを算出する(S114)。
【0146】
また、−sin信号Vy2のみに異常が生じている場合(S115:YES)、+sin信号Vy1に基づいて補正前回転角度θ4を算出し(S116)、+sin信号Vy1に基づいて算出された位相補正値φ4に基づいて補正前回転角度θ4を補正し、被検出部87の回転角度δを算出する(S117)。
【0147】
これにより、+sin信号Vy1または−sinVy2信号に異常が生じている場合でも、異常が生じていない+sin信号Vy1または−sin信号Vy2に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項7)
+cos信号Vx1および+sin信号Vy1に異常が生じている場合(S118:YES)、−cos信号Vx2および−sin信号Vy2に基づいて補正前回転角度θ5を算出し(S119)、−cos信号Vx2および−sin信号Vy2に基づいて算出された位相補正値φ5に基づいて補正前回転角度θ5を補正し、被検出部87の回転角度δを算出する(S120)
+cos信号Vx1および−sin信号Vy2に異常が生じている場合(S121:YES)、−cos信号Vx2および+sin信号Vy1に基づいて補正前回転角度θ6を算出し(S122)、−cos信号Vx2および+sin信号Vy1に基づいて算出された位相補正値φ6に基づいて補正前回転角度θ6を補正し、被検出部87の回転角度δを算出する(S123)。
【0148】
また、−cos信号Vx2および+sin信号Vy1に異常が生じている場合(S124:YES)、+cos信号Vx1および−sin信号Vy2に基づいて補正前回転角度θ7を算出し(S125)、+cos信号Vx1および−sin信号Vy2に基づいて算出された位相補正値φ7に基づいて補正前回転角度θ7を補正し、被検出部87の回転角度δを算出する(S126)。
【0149】
−cos信号Vx2および−sin信号Vy2に異常が生じている場合(S127:YES)、+cos信号Vx1および+sin信号Vy1に基づいて補正前回転角度θ8を算出し(S128)、+cos信号Vx1および+sin信号Vy1に基づいて算出された位相補正値φ8に基づいて補正前回転角度θ8を補正し、被検出部87の回転角度δを算出する(S129)。
【0150】
これにより、+cos信号Vx1または−cos信号Vx2、および、+sin信号Vy1または−sin信号Vy2に異常が生じている場合でも、異常が生じていない+cos信号Vx1または−cos信号Vx2、および、+sin信号Vy1または−sin信号Vy2に基づいて算出された補正前回転角度および位相補正値に基づき、高精度に被検出部87の回転角度δを算出することができる。(請求項6、7)
また、本実施形態では、被検出部87の回転角度をδ、位相ずれをαとすると、補正前回転角度θは、以下の通りである。
【0151】
θ=δ+45+α/2
また、位相補正値φは、以下の通りである。
【0152】
φ=45+α/2
これにより、例えば補正前回転角度θから位相補正値φを減算することにより、被検出部87の回転角度δを簡素な式で算出することができる。また、位相補正値φは、定数であるので、位相補正値φをメモリ部52等に記憶する場合、位相補正値が関数である場合と比較して、当該メモリ部52における容量を低減することができる。
【0153】
本実施形態の回転角検出装置10は、電動パワーステアリング装置1に用いられる。これにより、電動パワーステアリング装置1のモータ80の回転角度を高精度に算出することができ、電動パワーステアリング装置1の駆動をより精度よく制御することができる。また、出力信号Vx1、Vx2、Vy1、Vy2に異常が生じた場合であっても、出力信号間の位相ずれを補正して高精度に回転角度を算出し、電動パワーステアリング装置1の駆動を継続することができる。(請求項9)
本実施形態では、制御部51が「出力信号取得手段」、「補正前回転角度算出手段」、「位相補正値算出手段」、「補正手段」を構成し、メモリ部52が「記憶部」を構成する。また、図5中のS11および図6中のS101が「出力信号取得手段」の機能としての処理に相当し、図6中のS104、S107、S110、S113、S116、図7中のS119、S122、S125、S128が「補正前回転角度算出手段」の機能としての処理に相当し、図5中のS12が「位相補正値算出手段」の機能としての処理に相当し、図6中のS105、S108、S111、S114、S117、図7中のS120、S123、S126、S129が「補正手段」の機能としての処理に相当する。
【0154】
(他の実施形態)
(ア)上記実施形態では、+cos信号Vx1のみに異常が生じている場合(S106:YES)、−cos信号Vx2およびsin信号Vyから算出される補正前回転角度θ1および位相補正値φ1に基づいて回転角度δを算出した。他の実施形態では、−cos信号Vx2および−sin信号Vy2から算出される補正前回転角度θ5および位相補正値φ5に基づいて回転角度δを算出してもよいし、−cos信号Vx2および+sin信号Vy1から算出される補正前回転角度θ6および位相補正値φ6に基づいて回転角度δを算出してもよい。
【0155】
同様に、−cos信号Vx2のみに異常が生じている場合(S109:YES)、+cos信号Vx1および−sin信号Vy2から算出される補正前回転角度θ7および位相補正値φ7に基づいて回転角度δを算出してもよいし、+cos信号Vx1および+sin信号Vy1から算出される補正前回転角度θ8および位相補正値φ8に基づいて回転角度δを算出してもよい。
【0156】
すなわち、+cos信号または−cos信号に異常が生じている場合、+sin信号、−sin信号、または+sin信号および−sin信号と、異常が生じていない+cos信号または−cos信号とに基づいて補正前回転角度および位相補正値を算出し、算出された補正前回転角度および位相補正値に基づき、被検出部の回転角度を算出する、ということである。
【0157】
また、+sin信号Vy1のみに異常が生じている場合(S112:YES)、−cos信号Vx2および−sin信号Vy2から算出される補正前回転角度θ5および位相補正値φ5に基づいて回転角度δを算出してもよいし、+cos信号Vx1および−sin信号Vy2から算出される補正前回転角度θ7および位相補正値φ7に基づいて回転角度δを算出してもよい。
【0158】
さらにまた、−sin信号Vy2のみに異常が生じている場合(S115:YES)、−cos信号Vx2および+sin信号Vy1から算出される補正前回転角度θ6および位相補正値φ6に基づいて回転角度δを算出してもよいし、+cos信号Vx1および+sin信号Vy1から算出される補正前回転角度θ8および位相補正値φ8に基づいて回転角度δを算出してもよい。
【0159】
すなわち、+sin信号または−sin信号に異常が生じている場合、+cos信号、−cos信号、または+cos信号および−cos信号と、異常が生じていない+sin信号または−sin信号に基づいて補正前回転角度および位相補正値を算出し、算出された補正前回転角度および位相補正値に基づき、被検出部の回転角度を算出する、ということである。
【0160】
また、上記実施形態では、cos信号およびsin信号の全てが正常である場合、cos信号同士を減算したcos信号、および、sin信号同士を減算したsin信号に基づいて補正前回転角度および位相補正値を算出した。他の実施形態では、cos信号およびsin信号の全てが正常である場合、どのようなcos信号とsin信号との組み合わせを用いて補正前回転角度および位相補正値を算出してもよい。
【0161】
また、補正前回転角度および位相補正値の算出方法は、上記実施形態にて説明した方法に限らない。
【0162】
(イ)上記実施形態では、cos信号を基準として位相ずれを補正するための位相補正値を算出したが、他の実施形態では、sin信号を基準として位相ずれを補正するための位相補正値を算出してもよい。なお、出力信号はcos信号およびsin信号に限らず、位相の異なる複数の出力信号としてもよい。その場合、1つの出力信号を基準とし、他の出力信号の位相ずれを補正するための位相補正値を算出すればよい。(請求項2の裏)
(ウ)上記実施形態では、cos信号およびsin信号の振幅が1であり、増幅部40において加算されるオフセット値は2.5であった。他の実施形態では、マイコン50にて出力信号を取得可能な範囲において、振幅およびオフセット値は適宜設定することができる。
【0163】
また、上記実施形態では、取得される+cos信号、−cos信号、+sin信号、および−sin信号の振幅は等しかったが、他の実施形態では、取得される信号の振幅は、出力信号毎に異なっていてもよい。この場合、それぞれの出力信号の振幅がわかっていれば、制御部において演算処理を行い、振幅を補正することにより、上記実施形態と同様にして補正前回転角度および位相補正値を算出し、被検出部の回転角度を算出することができる。
【0164】
(エ)上記実施形態では、回転角検出装置は増幅部を備えていたが、他の実施形態では、増幅部を省き、それぞれのハーフブリッジから出力される出力信号がそのままマイコン50によって取得されるように構成してもよい。
【0165】
(オ)上記実施形態では、2つのブリッジ回路が別々の電源に接続されていたが、他の実施形態では、2つのブリッジ回路が同一の電源に接続されていてもよい。また、一方のブリッジ回路から取得される出力信号が+cos信号および−cos信号であり、他方のブリッジ回路から取得される出力信号が+sin信号および−sin信号であってもよい。
【0166】
(カ)上記実施形態では、ブリッジ回路は2つであったが、他の実施形態では、ブリッジ回路は2つに限らず、1つであってもよいし、3つ以上であってもよい。また、ハーフブリッジから出力され、マイコンにて取得される出力信号は、少なくとも2つの位相の異なる出力信号があれば、いくつであってもよい。さらにまた、1つのハーフブリッジから複数の出力信号を取得してもよい。(請求項1のフォロー)
(キ)上記実施形態では、回転角検出装置を電動パワーステアリング装置に用いたが、これに限らず、他の分野へ適用することはもちろん可能である。(請求項9の裏)
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0167】
1・・・電動パワーステアリング装置
10・・・回転角検出装置
11・・・第1ブリッジ回路(回路部)
12・・・第2ブリッジ回路(回路部)
14〜17・・・ハーフブリッジ(センサ素子組)
21〜28・・・センサ素子
31〜34・・・ハーフブリッジの中点、
40・・・増幅部
50・・・マイコン
51・・・制御部(出力信号取得手段、補正前回転角度算出手段、位相補正値算出手段、補正手段)
52・・・メモリ部(記憶部)
80・・・モータ
87・・・被検出部
90・・・ステアリングシステム
【特許請求の範囲】
【請求項1】
(a)被検出部の回転に応じて変化する回転磁界を感知し前記被検出部の回転角度に応じてインピーダンスが変化するセンサ素子により構成される複数のセンサ素子組を有する回路部と、
(b)複数の前記センサ素子組から出力される出力信号を前記センサ素子組毎に取得する出力信号取得手段と、
(c)前記出力信号取得手段により取得された前記出力信号に基づき、前記被検出部の補正前回転角度を算出する補正前回転角度算出手段と、
(d)前記出力信号取得手段により取得された前記出力信号に基づき、前記出力信号間の位相ずれを補正するための位相補正値を算出する位相補正値算出手段と、
(e)前記位相補正値算出手段により算出された前記位相補正値を記憶する記憶部と、
(f)前記記憶部に記憶された前記位相補正値を取得し、取得された前記位相補正値に基づき、前記補正前回転角度算出手段により算出された前記補正前回転角度を補正する補正手段と、を備え、
(g)前記出力信号取得手段により取得される前記出力信号は、位相の異なる複数の信号を含み、
(h)前記位相補正値は、前記出力信号の組合せ毎に記憶し、
(i)前記出力信号の一部に異常が生じた場合には、異常が生じていない前記出力信号の組合せに対応した前記位相補正値を取得し、取得された前記位相補正値に基づき、前記補正前回転角度を補正することを特徴とする回転角検出装置。
【請求項2】
前記出力信号取得手段により取得される前記出力信号は、cos信号およびsin信号を含むことを特徴とする請求項1に記載の回転角検出装置。
【請求項3】
前記出力信号取得手段により取得される前記出力信号は、4以上であることを特徴とする請求項1または2に記載の回転角検出装置。
【請求項4】
前記出力信号取得手段により取得される前記出力信号は、+cos信号、−cos信号、+sin信号、および−sin信号を含むことを特徴とする請求項3に記載の回転角検出装置。
【請求項5】
前記補正前回転角度算出手段は、前記+cos信号、前記−cos信号、前記+sin信号、および、前記−sin信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+cos信号、前記−cos信号、前記+sin信号、および、前記−sin信号に基づいて前記位相補正値を算出することを特徴とする請求項4に記載の回転角検出装置。
【請求項6】
前記補正前回転角度算出手段は、前記+cos信号または前記−cos信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+cos信号または前記−cos信号に基づいて前記位相補正値を算出することを特徴とする請求項4または5に記載の回転角検出装置。
【請求項7】
前記補正前回転角度算出手段は、前記+sin信号または前記−sin信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+sin信号または前記−sin信号に基づいて前記位相補正値を算出することを特徴とする請求項4〜6のいずれか一項に記載の回転角検出装置。
【請求項8】
請求項1〜7のいずれか一項に記載された回転角検出装置を用いた電動パワーステアリング装置。
【請求項1】
(a)被検出部の回転に応じて変化する回転磁界を感知し前記被検出部の回転角度に応じてインピーダンスが変化するセンサ素子により構成される複数のセンサ素子組を有する回路部と、
(b)複数の前記センサ素子組から出力される出力信号を前記センサ素子組毎に取得する出力信号取得手段と、
(c)前記出力信号取得手段により取得された前記出力信号に基づき、前記被検出部の補正前回転角度を算出する補正前回転角度算出手段と、
(d)前記出力信号取得手段により取得された前記出力信号に基づき、前記出力信号間の位相ずれを補正するための位相補正値を算出する位相補正値算出手段と、
(e)前記位相補正値算出手段により算出された前記位相補正値を記憶する記憶部と、
(f)前記記憶部に記憶された前記位相補正値を取得し、取得された前記位相補正値に基づき、前記補正前回転角度算出手段により算出された前記補正前回転角度を補正する補正手段と、を備え、
(g)前記出力信号取得手段により取得される前記出力信号は、位相の異なる複数の信号を含み、
(h)前記位相補正値は、前記出力信号の組合せ毎に記憶し、
(i)前記出力信号の一部に異常が生じた場合には、異常が生じていない前記出力信号の組合せに対応した前記位相補正値を取得し、取得された前記位相補正値に基づき、前記補正前回転角度を補正することを特徴とする回転角検出装置。
【請求項2】
前記出力信号取得手段により取得される前記出力信号は、cos信号およびsin信号を含むことを特徴とする請求項1に記載の回転角検出装置。
【請求項3】
前記出力信号取得手段により取得される前記出力信号は、4以上であることを特徴とする請求項1または2に記載の回転角検出装置。
【請求項4】
前記出力信号取得手段により取得される前記出力信号は、+cos信号、−cos信号、+sin信号、および−sin信号を含むことを特徴とする請求項3に記載の回転角検出装置。
【請求項5】
前記補正前回転角度算出手段は、前記+cos信号、前記−cos信号、前記+sin信号、および、前記−sin信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+cos信号、前記−cos信号、前記+sin信号、および、前記−sin信号に基づいて前記位相補正値を算出することを特徴とする請求項4に記載の回転角検出装置。
【請求項6】
前記補正前回転角度算出手段は、前記+cos信号または前記−cos信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+cos信号または前記−cos信号に基づいて前記位相補正値を算出することを特徴とする請求項4または5に記載の回転角検出装置。
【請求項7】
前記補正前回転角度算出手段は、前記+sin信号または前記−sin信号に基づいて前記補正前回転角度を算出し、
前記位相補正値算出手段は、前記+sin信号または前記−sin信号に基づいて前記位相補正値を算出することを特徴とする請求項4〜6のいずれか一項に記載の回転角検出装置。
【請求項8】
請求項1〜7のいずれか一項に記載された回転角検出装置を用いた電動パワーステアリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−11629(P2013−11629A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2012−228781(P2012−228781)
【出願日】平成24年10月16日(2012.10.16)
【分割の表示】特願2010−212909(P2010−212909)の分割
【原出願日】平成22年9月23日(2010.9.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成24年10月16日(2012.10.16)
【分割の表示】特願2010−212909(P2010−212909)の分割
【原出願日】平成22年9月23日(2010.9.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]