
回転角法によるねじ締結方法、および報知機能付きねじ締結装置
【課題】回転角法によるねじ締結に関して、非比例域での着座点軸力の検出を簡便にする方法を提供する。
【解決手段】締結体締付け線図を参照した回転角法によるねじ締結方法において、前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、前記ねじ締結体の締付け開始点から着座点S(スナグ点)までの軸力を、前記比例域の部分の偏角αに基づいて算定するようにした。
【解決手段】締結体締付け線図を参照した回転角法によるねじ締結方法において、前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、前記ねじ締結体の締付け開始点から着座点S(スナグ点)までの軸力を、前記比例域の部分の偏角αに基づいて算定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ねじ締結作業において、締付け軸力を直接制御するねじ締結方法およびその装置に関するものである。
【背景技術】
【0002】
従来、ねじ軸力を直接制御するねじ締結方法や装置はなく、本発明は、ねじ締結の軸力制御という工業技術の新しい分野を開くものである。従って、本発明は、機械装置のリサイクルを含め、機械文明の社会活動に広範に存在するねじ締結の分野にわたり、ねじ締結の目的・解釈・方法・用具等に革新的な影響をもたらすものである。
従来のねじ締結方法は、各種のものが存在するが、そのなかにあって、使用が普及しているのは、JIS規格(B 1083,B 1084)に取り上げられているトルク法、回転角法、トルク勾配法の3方法である。しかし、実際には、使用が比較的容易であるトルク法が圧倒的に普及しているのが実情である。なお、回転角法の有用な技術が特許文献1に開示されている。
【特許文献1】特開2002−292576号
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来のねじ締結の技術の難点は次のような点である。
まず、第1に、ねじ締結の主目的である締結軸力の計測ができないという点である。このことは、ねじ締結面に測定装置を設置できないという現実に照らして当然のことであって諦めざるを得ないという諦観を関係者に与えるのみであった。
最も普及しているトルク法について言えば、作業者はねじ締結に先立って、ねじ締結体のトルク係数を推定することを求められる。このトルク係数は、ねじ締結体の締結摺動面の摩擦力に主として支配されるものであり、これを推定することは不可能に近いことである。実際に行われていることは、ねじ締結部品の維持状況を管理することによって、トルク係数の経験値、推定値が保たれるようにすることである。従って、そのような方法は、高度に品質管理された作業所以外では実行することが困難な方法である。
【0004】
次に、第2に、ねじ締結体の着座点(スナグ点)における軸力を決定することが困難である点である。締結体締付け線図は、通常、初期非比例域と比例域とで成り立っている。前記初期非比例域から比例域への移行点が前記着座点(スナグ点)である。締付け開始点から着座点までの軸力と検出値(ねじ回転角)の関係は、そのねじ締結体の個性的且つ無法則なもので、従来は、工学的な論理には乗らないものとして取り扱われてきた。
ねじ締結の第1のプロセスは、その締結体締付け線図の着座点の軸力を決定することにある。このプロセス無くしては、比例域の本格的な締付けは実行できない。事実、このことによって、精確な回転角法によるねじ締結は実用化しないと言える。
なお、前記スナグ点とは、ねじ締結体の締付けにおいて、ねじ回転角が軸力に対して直線的に増加し始める点を表し、本発明において、その点は着座点と一致する。また、インパクトレンチに本発明を適用した場合には、アンビル等の被駆動軸を打撃するハンマは、この着座点になった時点からリバウンドを開始する。
【0005】
本発明は、前記特許文献1に記載の回転角法によるねじ締結に関して、その実用化を推進するためのものである。ねじ締結における軸力制御を目的とするねじ締結の制御方法として、本発明は、従来技術における初期非比例域部分の制御の欠落を補足した内容である。そのために、本発明は次の2点を課題としている。
(1)課題の第1は、ねじ締結作業の第1ステップの非比例域での着座点軸力の検出を簡便にする方法を提供することである。ねじ締結の開始とともに非比例域のデータを合理的且つ迅速に処理して、ねじ締付けの主要部である比例域締付けに移行させる方法を開発して提供することである。
(2)課題の第2は、ねじ締結作業者に、ねじ締結作業に際してねじ締結の目的である軸力の値を知らせ、そのためにねじの寸法と材質とを認識させること、及び、軸力の創出の達成を認識させる手段を提供することである。
【課題を解決するための手段】
【0006】
本発明にかかる回転角法によるねじ締結方法の請求項1においては、
締結体締付け線図を参照した回転角法によるねじ締結方法において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、
前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定するようにした。
請求項2においては、
前記締結体締付け線図に使用する座標の横軸である軸力線に、このねじ締結体のねじ系の角度比例定数を用いて軸力を目盛ることによって、前記締結体締付け線図を得るようにした。
請求項3においては、
前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定するようにした。
請求項4の報知機能付きねじ締結装置は、
締結体締付け線図を参照した回転角法によるねじ締結方法に用いる報知機能付きねじ締結装置において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成される場合に、
ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えるという手段を講じた。
【発明の効果】
【0007】
本発明の回転角法によるねじ締結方法によれば、締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定することを可能としたので、軸力の算定が容易になるという効果が得られる。
また、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記締結体締付け線図における着座点を正確に決定する必要がなくなるという効果も得られる。
本発明の報知機能付きねじ締結装置によれば、ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えているので、作業者はねじ締結状況を把握しながら確実な作業を行うことができる。
【発明を実施するための最良の形態】
【0008】
以下に、本発明にかかる回転角法によるねじ締結方法を、その実施の形態を示した図面に基づいて詳細に説明する。
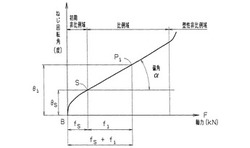
図1は、一般のねじ締結体の回転角法によるねじ回転角と軸力の関係を示す締結体締付け線図である。
この場合、ねじ締結体のねじ締結進行に従って、その締結状態は、通常、初期非比例域、続いて比例域、さらに塑性非比例域の3つの部分に分けられて軸力を高める。
図中のS点は着座点(スナグ点)を示しており、締結部品の接触面が締付け力によって固体的に密着する点である。着座点(スナグ点)Sにおける軸力はfs,ねじ回転角はθsである。
着座点(スナグ点)S以前の初期非比例域は、部品が密着不足で比例的な変形を発生できない部分である。
着座点(スナグ点)S以降は比例域であり、軸力がねじ回転角に対して直線的に増加する領域で、軸力はねじ系の角度比例定数とねじ回転角によって支配される。即ち、あるねじ締結状態Piにおけるねじ回転角がθiのとき、その軸力はfs+fiとなる。
塑性非比例域は、締付け力過剰によって締結部品のいずれかに塑性変形が発生する場合であり、本発明の対象外とする。
従って、図1に示した締結体締付け線図の例は、締結体締付け線図を参照した回転角法によるねじ締結方法において、前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角αが得られる場合である。
【0009】
なお、前記締結体締付け線図とは、ねじ締結体を締付ける場合に検出されるねじ回転角値と軸力との関係図のことである。締付け作業過程において検出するねじ回転角値を、座標の横軸である軸力線に対して順次読み取り、それを線で表したものを回転角検出線と呼ぶ。また、偏角をいう場合には、回転角検出線の軸力線に対する偏角を意味している。
図1においては、前記締結体締付け線図に使用する座標の横軸である軸力線には、このねじ締結体のねじ系の角度比例定数を用いて軸力Fを目盛ってある。
なお、前記ねじ系とは、ボルトとナットまたはそれに代わるめねじとの組合せのシステムのことを示している。ねじ系の角度比例定数とは、そのねじ締結体のねじ系に働く軸力とそれによるねじ系の伸びに起因するねじ系の回転角度との比例定数のことである。
【0010】
図1に示される通常のねじ締結体の軸力制御の第1のステップは、着座点S(このときのねじ回転角をθsとする。)における軸力fsを求めることである。初期非比例域の軸力とねじ回転角との関係は、個々のねじ締結体に固有の個性的なものであり、また、新品のねじを使って締付ける場合と、そのねじを緩めた後に同一ねじで再度締付ける場合とでも異なるものである。
また、このような現象を計測できる測定機器・測定技術も未発達であると言える。
以上のような事情によって、実用に適するねじ締結の回転角法は未だ出現していない状況である。
【0011】
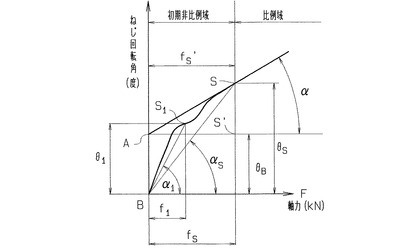
図2は、やや複雑な内容の初期非比例域をもつねじ締結体の場合を例として、本発明を説明するものである。
図中の初期非比例域上の一点S1における測定値を、回転角をθ1、締付け開始点Bと点S1とを結ぶ線分BS1の軸力線に対する偏角をα1とすれば、この点S1に対する軸力f1は次のように示される。
f1=θ1×cotα1
この過程を続行すれば、着座点(スナグ点S)に到達し、その時の軸力fsは次のように示される。
fs=θs×cotαs=fs’
【0012】
以上のことは、初期非比例域においては、測定データは複雑に表れるが、軸力に対する本質は小直角三角形ASS’に置き換えることができるということを示している。また、その偏角は比例域における偏角αと同一であることを示している。
なお、着座点を通過したか否かは、ねじ回転角が微少増加したときに、偏角の増加量が所定の範囲に収まっているか否かで判定することができる。
このようにして、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角αに基づいて算定することができるのである。
このとき、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角α、同じ比例原点Aを持つ小直角三角形ASS’に置き換えることによって、前記ねじ締結体の締付け開始点Bから着座点(スナグ点)Sまでの軸力Fを、前記比例域の部分の偏角αに基づいて算定する。
このようにして、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角α、同じ比例原点Aをもつ小直角三角形ASS’に置き換えることによって、前記締結体締付け線図における着座点Sを正確に決定する必要が無くなる。
なお、前記比例原点Aとは、回転角度検出線がスナグ点Sを越えて直線状態になったときに、その直線を初期非比例域側に延長して、軸力が0となる縦軸(回転角線)と交わる点のことである。
【0013】
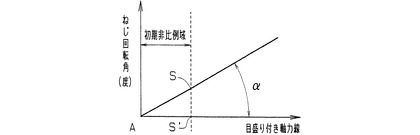
図3においては、図1に示すような初期非比例域を持つねじ締結体に対して本発明の回転角法を用いて軸力制御の締付けを行う場合、締結体締付け線図全体の偏角αによって比例原点Aを決定することができ、初期非比例域や着座点にとらわれることなく軸力制御が実行できることを示している。
即ち、図2における初期非比例域の部分を、小直角三角形ASS’に置き換え、比例原点Aを座標原点とすることによって、初期非比例域や着座点にとらわれることなく軸力制御が実行できるのである。
【0014】
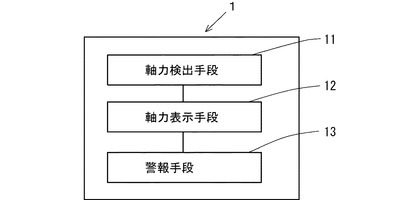
図4には、本発明にかかる報知機能付きねじ締結装置の構成図を示した。
図中、1は前記報知機能付きねじ締結装置であり、ねじ締結の進行に伴い発生する軸力値を検出する軸力検出手段11と、検出された軸力値を表示する軸力表示手段12と、前記軸力値が予め設定された設定範囲内にあるか否かを判定して設定範囲を越えたときに警報を出力する警報手段13と、を備えている。なお、前記軸力表示手段12、警報手段13が特許請求の範囲に記載された報知手段に相当する構成である。
前記軸力検出手段11は、前記スナグ点を通過した後の軸力値を、ねじ回転角に基づいて算出して出力する。このとき、上述したように、図2における初期非比例域の部分を、小直角三角形ASS’に置き換え、比例原点Aを座標原点とすることによって、初期非比例域や着座点にとらわれることなく軸力制御が実行できるのである。
従って、作業者は、前記警報手段13から警報が出力されるまでねじ締結作業を進めればよい。その経過においては、前記軸力表示手段12によって表示される現在の軸力値を確認しながら作業を進めることができる。
なお、ある定められたねじ回転角を超えても軸力が所定値に満たない場合には、ボルトとナットが共回りしていると判定して、警報手段13から異常締付けの警報を出力することも可能である。また、軸力が定められた値に達しないときに、急にねじが回らなくなった場合は、ボルトとナットが焼き付いたと判定して異常締め付けの警報を出力することができる。
【産業上の利用可能性】
【0015】
本発明の適用範囲としては、まず、ねじ締結関連としては、回転角法ねじ締結実用化の促進に適用するものである。特に、回転衝撃レンチ(インパクトレンチ等)によるねじ締結制御の実用化の促進に適用する。次に、関連する用具としては、インパクトレンチ、オイルパルスレンチ、ナットランナ、回転角ハンドレンチ等がある。
【図面の簡単な説明】
【0016】
【図1】本発明にかかる回転角法によるねじ締結方法における締結体締付け線図である。
【図2】やや複雑な内容の初期非比例域をもつねじ締結体の場合の締結体締付け線図である。
【図3】本発明の回転角法を用いて軸力制御の締付けを行う場合の説明図である。
【図4】本発明にかかる報知機能付きねじ締結装置の構成図である。
【符号の説明】
【0017】
α 偏角
S 着座点、スナグ点
A 比例原点
三角形ASS’ 小直角三角形
1 報知機能付きねじ締結装置
11 軸力検出手段
12 軸力表示手段
13 警報手段
【技術分野】
【0001】
本発明は、ねじ締結作業において、締付け軸力を直接制御するねじ締結方法およびその装置に関するものである。
【背景技術】
【0002】
従来、ねじ軸力を直接制御するねじ締結方法や装置はなく、本発明は、ねじ締結の軸力制御という工業技術の新しい分野を開くものである。従って、本発明は、機械装置のリサイクルを含め、機械文明の社会活動に広範に存在するねじ締結の分野にわたり、ねじ締結の目的・解釈・方法・用具等に革新的な影響をもたらすものである。
従来のねじ締結方法は、各種のものが存在するが、そのなかにあって、使用が普及しているのは、JIS規格(B 1083,B 1084)に取り上げられているトルク法、回転角法、トルク勾配法の3方法である。しかし、実際には、使用が比較的容易であるトルク法が圧倒的に普及しているのが実情である。なお、回転角法の有用な技術が特許文献1に開示されている。
【特許文献1】特開2002−292576号
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来のねじ締結の技術の難点は次のような点である。
まず、第1に、ねじ締結の主目的である締結軸力の計測ができないという点である。このことは、ねじ締結面に測定装置を設置できないという現実に照らして当然のことであって諦めざるを得ないという諦観を関係者に与えるのみであった。
最も普及しているトルク法について言えば、作業者はねじ締結に先立って、ねじ締結体のトルク係数を推定することを求められる。このトルク係数は、ねじ締結体の締結摺動面の摩擦力に主として支配されるものであり、これを推定することは不可能に近いことである。実際に行われていることは、ねじ締結部品の維持状況を管理することによって、トルク係数の経験値、推定値が保たれるようにすることである。従って、そのような方法は、高度に品質管理された作業所以外では実行することが困難な方法である。
【0004】
次に、第2に、ねじ締結体の着座点(スナグ点)における軸力を決定することが困難である点である。締結体締付け線図は、通常、初期非比例域と比例域とで成り立っている。前記初期非比例域から比例域への移行点が前記着座点(スナグ点)である。締付け開始点から着座点までの軸力と検出値(ねじ回転角)の関係は、そのねじ締結体の個性的且つ無法則なもので、従来は、工学的な論理には乗らないものとして取り扱われてきた。
ねじ締結の第1のプロセスは、その締結体締付け線図の着座点の軸力を決定することにある。このプロセス無くしては、比例域の本格的な締付けは実行できない。事実、このことによって、精確な回転角法によるねじ締結は実用化しないと言える。
なお、前記スナグ点とは、ねじ締結体の締付けにおいて、ねじ回転角が軸力に対して直線的に増加し始める点を表し、本発明において、その点は着座点と一致する。また、インパクトレンチに本発明を適用した場合には、アンビル等の被駆動軸を打撃するハンマは、この着座点になった時点からリバウンドを開始する。
【0005】
本発明は、前記特許文献1に記載の回転角法によるねじ締結に関して、その実用化を推進するためのものである。ねじ締結における軸力制御を目的とするねじ締結の制御方法として、本発明は、従来技術における初期非比例域部分の制御の欠落を補足した内容である。そのために、本発明は次の2点を課題としている。
(1)課題の第1は、ねじ締結作業の第1ステップの非比例域での着座点軸力の検出を簡便にする方法を提供することである。ねじ締結の開始とともに非比例域のデータを合理的且つ迅速に処理して、ねじ締付けの主要部である比例域締付けに移行させる方法を開発して提供することである。
(2)課題の第2は、ねじ締結作業者に、ねじ締結作業に際してねじ締結の目的である軸力の値を知らせ、そのためにねじの寸法と材質とを認識させること、及び、軸力の創出の達成を認識させる手段を提供することである。
【課題を解決するための手段】
【0006】
本発明にかかる回転角法によるねじ締結方法の請求項1においては、
締結体締付け線図を参照した回転角法によるねじ締結方法において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、
前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定するようにした。
請求項2においては、
前記締結体締付け線図に使用する座標の横軸である軸力線に、このねじ締結体のねじ系の角度比例定数を用いて軸力を目盛ることによって、前記締結体締付け線図を得るようにした。
請求項3においては、
前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定するようにした。
請求項4の報知機能付きねじ締結装置は、
締結体締付け線図を参照した回転角法によるねじ締結方法に用いる報知機能付きねじ締結装置において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成される場合に、
ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えるという手段を講じた。
【発明の効果】
【0007】
本発明の回転角法によるねじ締結方法によれば、締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角に基づいて算定することを可能としたので、軸力の算定が容易になるという効果が得られる。
また、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記締結体締付け線図における着座点を正確に決定する必要がなくなるという効果も得られる。
本発明の報知機能付きねじ締結装置によれば、ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えているので、作業者はねじ締結状況を把握しながら確実な作業を行うことができる。
【発明を実施するための最良の形態】
【0008】
以下に、本発明にかかる回転角法によるねじ締結方法を、その実施の形態を示した図面に基づいて詳細に説明する。
図1は、一般のねじ締結体の回転角法によるねじ回転角と軸力の関係を示す締結体締付け線図である。
この場合、ねじ締結体のねじ締結進行に従って、その締結状態は、通常、初期非比例域、続いて比例域、さらに塑性非比例域の3つの部分に分けられて軸力を高める。
図中のS点は着座点(スナグ点)を示しており、締結部品の接触面が締付け力によって固体的に密着する点である。着座点(スナグ点)Sにおける軸力はfs,ねじ回転角はθsである。
着座点(スナグ点)S以前の初期非比例域は、部品が密着不足で比例的な変形を発生できない部分である。
着座点(スナグ点)S以降は比例域であり、軸力がねじ回転角に対して直線的に増加する領域で、軸力はねじ系の角度比例定数とねじ回転角によって支配される。即ち、あるねじ締結状態Piにおけるねじ回転角がθiのとき、その軸力はfs+fiとなる。
塑性非比例域は、締付け力過剰によって締結部品のいずれかに塑性変形が発生する場合であり、本発明の対象外とする。
従って、図1に示した締結体締付け線図の例は、締結体締付け線図を参照した回転角法によるねじ締結方法において、前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角αが得られる場合である。
【0009】
なお、前記締結体締付け線図とは、ねじ締結体を締付ける場合に検出されるねじ回転角値と軸力との関係図のことである。締付け作業過程において検出するねじ回転角値を、座標の横軸である軸力線に対して順次読み取り、それを線で表したものを回転角検出線と呼ぶ。また、偏角をいう場合には、回転角検出線の軸力線に対する偏角を意味している。
図1においては、前記締結体締付け線図に使用する座標の横軸である軸力線には、このねじ締結体のねじ系の角度比例定数を用いて軸力Fを目盛ってある。
なお、前記ねじ系とは、ボルトとナットまたはそれに代わるめねじとの組合せのシステムのことを示している。ねじ系の角度比例定数とは、そのねじ締結体のねじ系に働く軸力とそれによるねじ系の伸びに起因するねじ系の回転角度との比例定数のことである。
【0010】
図1に示される通常のねじ締結体の軸力制御の第1のステップは、着座点S(このときのねじ回転角をθsとする。)における軸力fsを求めることである。初期非比例域の軸力とねじ回転角との関係は、個々のねじ締結体に固有の個性的なものであり、また、新品のねじを使って締付ける場合と、そのねじを緩めた後に同一ねじで再度締付ける場合とでも異なるものである。
また、このような現象を計測できる測定機器・測定技術も未発達であると言える。
以上のような事情によって、実用に適するねじ締結の回転角法は未だ出現していない状況である。
【0011】
図2は、やや複雑な内容の初期非比例域をもつねじ締結体の場合を例として、本発明を説明するものである。
図中の初期非比例域上の一点S1における測定値を、回転角をθ1、締付け開始点Bと点S1とを結ぶ線分BS1の軸力線に対する偏角をα1とすれば、この点S1に対する軸力f1は次のように示される。
f1=θ1×cotα1
この過程を続行すれば、着座点(スナグ点S)に到達し、その時の軸力fsは次のように示される。
fs=θs×cotαs=fs’
【0012】
以上のことは、初期非比例域においては、測定データは複雑に表れるが、軸力に対する本質は小直角三角形ASS’に置き換えることができるということを示している。また、その偏角は比例域における偏角αと同一であることを示している。
なお、着座点を通過したか否かは、ねじ回転角が微少増加したときに、偏角の増加量が所定の範囲に収まっているか否かで判定することができる。
このようにして、前記ねじ締結体の締付け開始点から着座点(スナグ点)までの軸力を、前記比例域の部分の偏角αに基づいて算定することができるのである。
このとき、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角α、同じ比例原点Aを持つ小直角三角形ASS’に置き換えることによって、前記ねじ締結体の締付け開始点Bから着座点(スナグ点)Sまでの軸力Fを、前記比例域の部分の偏角αに基づいて算定する。
このようにして、前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角α、同じ比例原点Aをもつ小直角三角形ASS’に置き換えることによって、前記締結体締付け線図における着座点Sを正確に決定する必要が無くなる。
なお、前記比例原点Aとは、回転角度検出線がスナグ点Sを越えて直線状態になったときに、その直線を初期非比例域側に延長して、軸力が0となる縦軸(回転角線)と交わる点のことである。
【0013】
図3においては、図1に示すような初期非比例域を持つねじ締結体に対して本発明の回転角法を用いて軸力制御の締付けを行う場合、締結体締付け線図全体の偏角αによって比例原点Aを決定することができ、初期非比例域や着座点にとらわれることなく軸力制御が実行できることを示している。
即ち、図2における初期非比例域の部分を、小直角三角形ASS’に置き換え、比例原点Aを座標原点とすることによって、初期非比例域や着座点にとらわれることなく軸力制御が実行できるのである。
【0014】
図4には、本発明にかかる報知機能付きねじ締結装置の構成図を示した。
図中、1は前記報知機能付きねじ締結装置であり、ねじ締結の進行に伴い発生する軸力値を検出する軸力検出手段11と、検出された軸力値を表示する軸力表示手段12と、前記軸力値が予め設定された設定範囲内にあるか否かを判定して設定範囲を越えたときに警報を出力する警報手段13と、を備えている。なお、前記軸力表示手段12、警報手段13が特許請求の範囲に記載された報知手段に相当する構成である。
前記軸力検出手段11は、前記スナグ点を通過した後の軸力値を、ねじ回転角に基づいて算出して出力する。このとき、上述したように、図2における初期非比例域の部分を、小直角三角形ASS’に置き換え、比例原点Aを座標原点とすることによって、初期非比例域や着座点にとらわれることなく軸力制御が実行できるのである。
従って、作業者は、前記警報手段13から警報が出力されるまでねじ締結作業を進めればよい。その経過においては、前記軸力表示手段12によって表示される現在の軸力値を確認しながら作業を進めることができる。
なお、ある定められたねじ回転角を超えても軸力が所定値に満たない場合には、ボルトとナットが共回りしていると判定して、警報手段13から異常締付けの警報を出力することも可能である。また、軸力が定められた値に達しないときに、急にねじが回らなくなった場合は、ボルトとナットが焼き付いたと判定して異常締め付けの警報を出力することができる。
【産業上の利用可能性】
【0015】
本発明の適用範囲としては、まず、ねじ締結関連としては、回転角法ねじ締結実用化の促進に適用するものである。特に、回転衝撃レンチ(インパクトレンチ等)によるねじ締結制御の実用化の促進に適用する。次に、関連する用具としては、インパクトレンチ、オイルパルスレンチ、ナットランナ、回転角ハンドレンチ等がある。
【図面の簡単な説明】
【0016】
【図1】本発明にかかる回転角法によるねじ締結方法における締結体締付け線図である。
【図2】やや複雑な内容の初期非比例域をもつねじ締結体の場合の締結体締付け線図である。
【図3】本発明の回転角法を用いて軸力制御の締付けを行う場合の説明図である。
【図4】本発明にかかる報知機能付きねじ締結装置の構成図である。
【符号の説明】
【0017】
α 偏角
S 着座点、スナグ点
A 比例原点
三角形ASS’ 小直角三角形
1 報知機能付きねじ締結装置
11 軸力検出手段
12 軸力表示手段
13 警報手段
【特許請求の範囲】
【請求項1】
締結体締付け線図を参照した回転角法によるねじ締結方法において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、
前記ねじ締結体の締付け開始点から着座点までの軸力を、前記比例域の部分の偏角に基づいて算定することを特徴とする回転角法によるねじ締結方法。
【請求項2】
前記締結体締付け線図に使用する座標の横軸である軸力線に、このねじ締結体のねじ系の角度比例定数を用いて軸力を目盛ることによって、前記締結体締付け線図を得ることを特徴とする請求項1に記載の回転角法によるねじ締結方法。
【請求項3】
前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記ねじ締結体の締付け開始点から着座点までの軸力を、前記比例域の部分の偏角に基づいて算定することを特徴とする請求項1、2の何れかに記載の回転角法によるねじ締結方法。
【請求項4】
締結体締付け線図を参照した回転角法によるねじ締結方法に用いる報知機能付きねじ締結装置において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成される場合に、
ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えたことを特徴とする報知機能付きねじ締結装置。
【請求項1】
締結体締付け線図を参照した回転角法によるねじ締結方法において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成され、且つ、前記締結体締付け線図の偏角及び比例域の部分の偏角が得られる場合に、
前記ねじ締結体の締付け開始点から着座点までの軸力を、前記比例域の部分の偏角に基づいて算定することを特徴とする回転角法によるねじ締結方法。
【請求項2】
前記締結体締付け線図に使用する座標の横軸である軸力線に、このねじ締結体のねじ系の角度比例定数を用いて軸力を目盛ることによって、前記締結体締付け線図を得ることを特徴とする請求項1に記載の回転角法によるねじ締結方法。
【請求項3】
前記締結体締付け線図における初期非比例域の部分を、比例域の部分と同じ偏角、同じ比例原点を持つ小直角三角形に置き換えることによって、前記ねじ締結体の締付け開始点から着座点までの軸力を、前記比例域の部分の偏角に基づいて算定することを特徴とする請求項1、2の何れかに記載の回転角法によるねじ締結方法。
【請求項4】
締結体締付け線図を参照した回転角法によるねじ締結方法に用いる報知機能付きねじ締結装置において、
前記締結体締付け線図が、締付け初期に発生する初期非比例域の部分と、締付け主要部である比例域の部分とで構成される場合に、
ねじ締結の進行に伴い発生する軸力値を検出して報知する手段を備えたことを特徴とする報知機能付きねじ締結装置。
【図1】



【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−160405(P2007−160405A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2004−27914(P2004−27914)
【出願日】平成16年2月4日(2004.2.4)
【出願人】(000142517)株式会社空研 (9)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成16年2月4日(2004.2.4)
【出願人】(000142517)株式会社空研 (9)
【Fターム(参考)】
[ Back to top ]