
回転運動入力型操作シミュレータ
【課題】反力発生ばねが線形的なばね特性を有するものであっても操作手段に対する操作の全域に亘り操作量と操作反力との関係として好ましい連続的な非線形特性を達成する。
【解決手段】ブレーキペダル212に対する運転者の制動操作に応じて回転運動する入力部材14と、軸線12の周りに回転し入力部材14に回転運動を付与するブレーキペダル80と、変形量に応じて線形的に反力を発生する圧縮コイルばね68と、圧縮コイルばね68を変形させる出力部材16と、入力部材と出力部材との間に設けられ入力部材の回転運動を直線運動に変換して出力部材16に伝達し、圧縮コイルばね68の反力を出力部材を介して入力部材に伝達する伝達手段82とを有する回転運動入力型操作シミュレータ。伝達手段82は入力部材14の回転運動量に対する出力部材16の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させる。
【解決手段】ブレーキペダル212に対する運転者の制動操作に応じて回転運動する入力部材14と、軸線12の周りに回転し入力部材14に回転運動を付与するブレーキペダル80と、変形量に応じて線形的に反力を発生する圧縮コイルばね68と、圧縮コイルばね68を変形させる出力部材16と、入力部材と出力部材との間に設けられ入力部材の回転運動を直線運動に変換して出力部材16に伝達し、圧縮コイルばね68の反力を出力部材を介して入力部材に伝達する伝達手段82とを有する回転運動入力型操作シミュレータ。伝達手段82は入力部材14の回転運動量に対する出力部材16の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作シミュレータに係り、更に詳細には自動車等の車両のブレーキ装置のブレーキストロークシミュレータの如く、オペレータによる操作手段の操作を許すと共に操作手段を介してオペレータに所要の操作反力を与える回転運動入力型操作シミュレータに係る。
【背景技術】
【0002】
自動車等の車両のブレーキ装置に於いては、運転者がブレーキペダルを踏み込むことにより制動操作が行われ、運転者の制動操作量に基づいて各車輪の制動圧が制御されるブレーキ装置の場合には、一般に、運転者が感じる操作反力は運転者の制動操作量の増大につれて操作反力の増大率が漸次増大し、これにより運転者の制動操作量(ブレーキストローク)と操作反力(ブレーキ反力)との関係が非線形であることが好ましい。
【0003】
かかるブレーキストローク−ブレーキ反力の非線形特性を達成するブレーキストロークシミュレータは従来より種々の構成のものが提案されており、例えば下記の特許文献1にはブレーキストローク・ブレーキ反力の非線形特性を調節し得るよう構成されたブレーキストロークシミュレータが記載されている。
【特許文献1】特開2005−112034号公報
【発明の開示】
【0004】
ブレーキストローク−ブレーキ反力の関係が非線形である従来のブレーキストロークシミュレータは、一般に、ばね定数が一定で互いに異なる複数の反力発生ばねを有し、ブレーキストロークによって反力発生ばね全体としてのばね定数が異なることにより非線形特性を達成するようになっている。そのためブレーキストロークに対するブレーキ反力の関係が不連続な非線形であり、好ましい連続的な非線形ではないという問題がある。
【0005】
またブレーキストロークに対するブレーキ反力の関係を連続的な非線形にすべく、非線形のばね特性を有する一つの反力発生ばねを使用することが考えられるが、ブレーキストロークの全域に亘りブレーキストロークに対するブレーキ反力の関係を好ましい連続的な非線形にする反力発生ばねを形成することが非常に困難である。
【0006】
尚、ブレーキストローク−ブレーキ反力の非線形特性に関する上述の問題は、ブレーキストロークシミュレータに限られるものではなく、操作手段がオペレータによって操作され、オペレータによる操作手段の操作を許容すると共に、操作手段を介して運転者に操作反力を付与するフライトシミュレータの如き他の操作シミュレータについても同様に存在する。
本発明は、従来の操作シミュレータに於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は、操作手段に対するオペレータの操作量と反力発生ばねに対する変形量との関係を連続的な非線形の関係にすることにより、反力発生ばねが線形的なばね特性を有するものであっても操作手段に対する操作の全域に亘り操作量と操作反力との関係として好ましい連続的な非線形特性を達成する回転運動入力型操作シミュレータを提供することである。
〔課題を解決するための手段及び発明の効果〕
【0007】
上述の主要な課題は、本発明によれば、請求項1の構成、即ち軸線の周りに回転運動する入力部材と、オペレータによって操作されることにより軸線の周りに回転し前記入力部材に回転運動を付与する操作手段と、変形量に応じて反力を発生する反力発生手段を直線運動することにより変形させる出力部材と、前記入力部材と前記出力部材との間に設けられ前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達すると共に、前記反力発生手段の反力を前記出力部材を介して前記入力部材に伝達する伝達手段とを有し、オペレータによる前記操作手段の操作を許容すると共に、前記操作手段を介してオペレータに操作反力を付与する回転運動入力型操作シミュレータにして、前記反力発生手段は変形量に応じて線形的に反力を発生し、前記伝達手段は前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成されていることを特徴とする回転運動入力型操作シミュレータによって達成される。
【0008】
上記請求項1の構成によれば、伝達手段は入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させるので、入力部材の回転運動量に対する反力発生手段の変形量の比を入力部材の回転運動量に応じて連続的に非線形に変化させることができ、従って反力発生手段がその変形量に応じて線形的に反力を発生するものであっても、入力部材の回転運動量に対する反力発生手段の反力の関係を所望の連続的な非線形の関係にすることができ、これにより操作手段に対する操作の全域に亘り操作量と操作反力との関係として好ましい連続的な非線形特性を達成することができる。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記伝達手段は前記入力部材に設けられたカムと、前記出力部材に設けられ前記カムに係合するカムフォロアとを有し、前記カムフォロアが前記カムに従動することにより前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成される(請求項2の構成)。
【0010】
上記請求項2の構成によれば、カムフォロアがカムに従動することにより入力部材の回転運動量に対する出力部材の直線運動量の比が入力部材の回転運動量に応じて連続的に非線形に変化されるので、入力部材の回転運動量に対する出力部材の直線運動量の比を確実に入力部材の回転運動量に応じて連続的に非線形に変化させることができると共に、カム及びカムフォロアの設定によって所望の連続的な非線形特性を達成することができる。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、前記入力部材及び前記出力部材は前記軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合しているよう構成される(請求項3の構成)。
【0012】
上記請求項3の構成によれば、入力部材及び出力部材は軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合しているので、例えば入力部材及び出力部材が軸線に沿って配設された構造の場合に比して、操作シミュレータの軸線方向の長さを低減し、操作シミュレータをコンパクト化することができる。
【0013】
また本発明によれば、上記請求項1乃至3の何れかの構成に於いて、前記伝達手段は前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達し、前記出力部材が前記反力発生手段より受けた反力を前記入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換して前記入力部材に伝達するよう構成される(請求項4の構成)。
【0014】
上記請求項4の構成によれば、入力部材の回転運動が直線運動に変換されて出力部材に伝達され、出力部材が反力発生手段より受けた反力が入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換されて入力部材に伝達されるので、反力発生手段が出力部材の直線運動方向に変形されることにより発生された反力を操作手段の枢動操作量増大方向とは逆方向の反力として確実に操作手段に伝達させることができる。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項2乃至4の何れかの構成に於いて、前記カム及び前記カムフォロアの一方はカム溝であり、前記カム及び前記カムフォロアの他方は前記カム溝に係合し前記カム溝に沿って移動するカム溝係合部材であり、前記カム溝は前記軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲しているよう構成される(請求項5の構成)。
【0016】
上記請求項5の構成によれば、カム溝係合部材がカム溝に係合しカム溝に沿って移動し、カム溝は軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲しているので、カム溝係合部材がカム溝に係合した状態にてカム溝に沿って移動することにより入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させることができ、従ってカム溝の湾曲形状の設定によって所望の連続的な非線形特性を達成することができる。
【0017】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3乃至5の何れかの構成に於いて、前記反力発生手段は前記軸線に沿う方向の変形を受けることにより変形量に応じて線形的に前記軸線に沿う方向の反力を発生するよう構成される(請求項6の構成)。
【0018】
上記請求項6の構成によれば、反力発生手段は軸線に沿う方向の変形を受けることにより変形量に応じて線形的に軸線に沿う方向の反力を発生するので、出力部材の軸線に沿う方向の直線運動量に応じて線形的に増減する軸線に沿う方向の反力を出力部材に対し付与することができる。
【0019】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至6の何れかの構成に於いて、前記入力部材はハウジングにより直線運動可能に支持され、前記ハウジングと共働して両側に二つのシリンダ室を郭定しており、前記入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されているよう構成される(請求項7の構成)。
【0020】
上記請求項7の構成によれば、入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されているので、入力部材の回転運動量に対する作動流体の供給量の比が入力部材の回転運動量の増大に伴って漸次増大するよう、作動流体の圧力にて作動する装置へ作動流体を供給することができ、これにより操作手段に対するオペレータの操作量に対する作動流体の供給量の比が入力部材の回転運動量の増大に伴って漸次増大するよう、作動流体の圧力にて作動する装置へ作動流体を供給することができる。
【0021】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項7の構成に於いて、前記入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室は該シリンダ室内の圧力を制御する手段に連通接続されているよう構成される(請求項8の構成)。
【0022】
上記請求項8の構成によれば、入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室内の圧力を制御することができ、これにより操作手段に対するオペレータの操作を補助することができると共に、操作手段に対するオペレータの操作に依存せずに作動流体の圧力にて作動する装置へ作動流体を供給することができる。
【0023】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至4の何れかの構成に於いて、前記伝達手段は前記入力部材の回転運動を前記軸線を横切る方向の直線運動に変換して前記出力部材に伝達するよう構成される(請求項9の構成)。
【0024】
上記請求項9の構成によれば、入力部材の回転運動が軸線を横切る方向の直線運動に変換されて出力部材に伝達されるので、出力部材の直線運動の方向を軸線を横切る方向に設定することができ、従って出力部材による反力発生手段に対する変形方向を軸線を横切る方向に設定することができる。
【0025】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項5乃至8の何れかの構成に於いて、前記カム溝係合部材は出力部材に固定され径方向に延在する軸部材と、前記軸部材に回転可能に支持され前記カム溝の壁面に転動可能に係合するカムローラとを有するよう構成される(請求項10の構成)。
【0026】
上記請求項10の構成によれば、カム溝係合部材は出力部材に固定され径方向に延在する軸部材と、軸部材に回転可能に支持されカム溝の壁面に転動可能に係合するカムローラとを有するので、カム溝係合部材がカム溝の壁面に転動可能に係合していない構造の場合に比して、カム溝係合部材とカム溝の壁面との間の摩擦を低減し、入力部材の回転運動と出力部材の直線運動との間の運動変換を円滑に行わせることができる。
【0027】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項10の構成に於いて、前記カム溝係合部材は前記軸部材に回転可能に支持され前記出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有するよう構成される(請求項11の構成)。
【0028】
上記請求項11の構成によれば、カム溝係合部材は軸部材に回転可能に支持され出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有するので、ガイド溝の壁面に転動可能に係合するガイドローラを有しない構造の場合に比して、軸部材を確実に出力部材の直線運動の方向に沿って移動させることができ、これにより入力部材の回転運動と出力部材の直線運動との間の運動変換を円滑に行わせることができる。
〔課題解決手段の好ましい態様〕
【0029】
本発明の一つの好ましい態様によれば、上記請求項1乃至11の何れかの構成に於いて、伝達手段は入力部材の回転運動量に対する出力部材の直線運動量の比が入力部材の回転運動量の増大につれて漸次増大するよう、入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成される(好ましい態様1)。
【0030】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至11又は上記好ましい態様1の何れかの構成に於いて、操作手段は軸線の周りに枢動するよう構成される(好ましい態様2)。
【0031】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至11又は上記好ましい態様1又は2の何れかの構成に於いて、操作手段は一端にて入力部材に一体的に連結されているよう構成される(好ましい態様3)。
【0032】
本発明の他の一つの好ましい態様によれば、上記請求項3乃至8又は10又は11又は上記好ましい態様1乃至3の何れかの構成に於いて、入力部材はハウジングを囲繞する状態にてハウジングにより軸線の周りに回転可能に支持され、出力部材はハウジング内にて軸線に沿って直線運動可能にハウジングにより支持されているよう構成される(好ましい態様4)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至4の何れかの構成に於いて、軸線の周りに等間隔に隔置された複数のカム溝及びカム溝係合部材が設けられているよう構成される(好ましい態様5)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至5の何れかの構成に於いて、カム溝は入力部材に設けられ、カム溝係合部材は出力部材により支持されているよう構成される(好ましい態様6)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至6の何れかの構成に於いて、作動流体の圧力にて作動する装置は作動流体の圧力に応じた反力を出力部材に付与することにより反力発生手段として作用するよう構成される(好ましい態様7)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項9又は上記好ましい態様1乃至3の何れかの構成に於いて、伝達手段は偏心カムにより入力部材の回転運動を軸線を横切る方向の直線運動に変換して出力部材に伝達するよう構成される(好ましい態様8)。
【0037】
本発明の他の一つの好ましい態様によれば、上記請求項11又は上記好ましい態様1乃至7の何れかの構成に於いて、入力部材はハウジングを囲繞する状態にてハウジングにより軸線の周りに回転可能に支持され、ガイド溝はハウジングに設けられているよう構成される(好ましい態様9)。
【発明を実施するための最良の形態】
【0038】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施例について詳細に説明する。
[第一の実施例]
【0039】
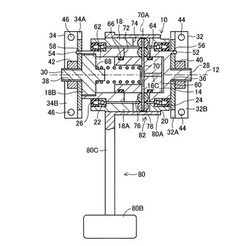
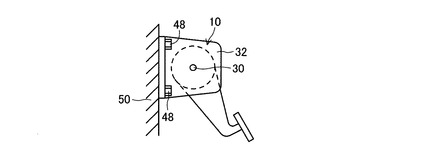
図1はブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第一の実施例を示す軸線に沿う断面図、図2は第一の実施例の出力ロータを平面に展開して示す展開図、図3は車両に搭載された状態にて第一の実施例の操作シミュレータを示す解図的側面図である。
【0040】
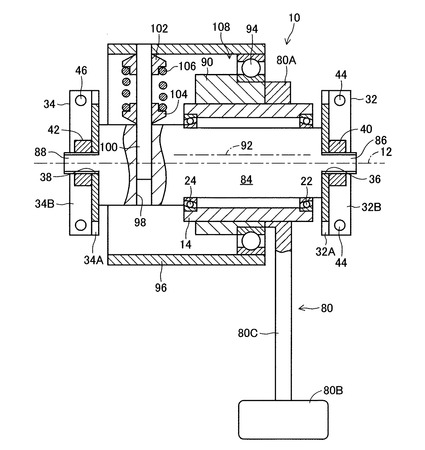
これらの図に於いて、10はブレーキストロークシミュレータを全体的に示しており、ストロークシミュレータ10は軸線12の周りに回転可能な入力部材としての入力ロータ14と、軸線12に沿って直線運動可能な出力部材としての出力ピストン16と、入力ロータ14を軸線12の周りに回転可能に支持すると共に、出力ピストン16を軸線12に沿って直線運動可能に支持するハウジング18とを有している。
【0041】
ハウジング18は一端にて開口し軸線12に沿って延在する円筒形の本体18Aと、本体18Aの開口端にねじ込み又は圧入等の手段により固定されたエンドキャップ18Bとよりなっている。入力ロータ14はハウジング18の円筒部にその外側にて遊嵌合し、その軸線に沿う両端部にて本体18Aとの間に設けられたアンギュラベアリング20及び22によりハウジング18に対し相対的に軸線12の周りに回転可能に支持されている。
【0042】
アンギュラベアリング20及び22は入力ロータ14がハウジング18に対し相対的に軸線12の周りに回転することを許すが、入力ロータ14がハウジング18に対し相対的に軸線12に沿って移動することを阻止する。アンギュラベアリング20及び22に対し軸線方向外側には軸線12の周りに環状に延在するカップシール24及び26が装着されている。カップシール24及び26はゴムの如き弾性材よりなり、入力ロータ14がハウジング18に対し相対的に軸線12の周りに回転することを許しつつアンギュラベアリング20及び22に粉塵や泥水等の異物が侵入することを阻止する。
【0043】
本体18Aの端壁及びエンドキャップ18Bにはそれぞれ軸線12に沿って互いに離れる方向へ突出する支持軸28及び30が一体に設けられている。支持軸28及び30はそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに設けられた孔36及び38に挿通されている。また支持軸28及び30は雄ねじを有し、それらの雄ねじにはそれぞれ耳部32A及び34Aに対し本体18Aの端壁及びエンドキャップ18Bとは反対の側に於いてナット40及び42が螺合し、これによりハウジング18は取り付けブラケット32及び34によりそれらの間に支持されている。
【0044】
取り付けブラケット32及び34はそれぞれ耳部32A及び34Aに対し垂直に延在するベース部32B及び34Bを有し、ベース部32B及び34Bの両端近傍には二つのボルト孔44及び46が設けられている。図3に示されている如く、取り付けブラケット32及び34はボルト孔44及び46に挿通されたボルト48により車体50に取り付けられるようになっている。
【0045】
特に図示の実施例に於いては、本体18A及びエンドキャップ18Bにはそれぞれ支持軸28及び30より径方向外方へ隔置された位置に於いて軸線12に沿って支持軸28及び30の突出方向に突出する突起52及び54が一体に設けられている。突起52及び54はそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに設けられた係合孔56及び58に挿通され、これによりハウジング18が軸線12の周りに回転することが確実に防止されるようになっている。
【0046】
出力ピストン16はハウジング18の円筒部内に軸線12に沿って往復動可能に配置されており、エンドキャップ18Bの側へ向けて開いたコの字形の断面形状を有している。出力ピストン16はハウジング18と共働して第一のシリンダ室60及び第二のシリンダ室62を郭定しており、これらのシリンダ室は出力ピストン16に設けられた連通孔16Cにより互いに連通接続されている。出力ピストン16の両端部の外周にはテフロン(登録商標)リングの如き減摩リング64及び66が装着されており、減摩リング64及び66は出力ピストン16がハウジング18に対し相対的に直線運動する際の摩擦抵抗を低減する。第二のシリンダ室62内にて出力ピストン16とエンドキャップ18Bとの間には反力発生手段としての圧縮コイルばね68が弾装されており、圧縮コイルばね68は線形のばね特性を有し、軸線12に沿って延在している。
【0047】
荷重伝達ロッド70が出力ピストン16を貫通して軸線12に垂直に延在し、圧入等の手段により出力ピストン16に固定されている。荷重伝達ロッド70の両端部はハウジング18の円筒状の側壁に設けられたガイド溝72を貫通して入力ロータ14に設けられたカム溝74内まで延在している。また荷重伝達ロッド70の両端部は実質的に球形のガイドローラ76及びカムローラ78を自らの軸線70Aの周りに回転可能に支持している。各ガイドローラ76は対応するガイド溝72の壁面に転動可能に係合し、各カムローラ78はカム溝74の壁面に転動可能に係合している。ガイド溝72及びカム溝74の幅はそれぞれガイドローラ76及びカムローラ78の最大直径よりも極僅かに大きい値に設定されている。
【0048】
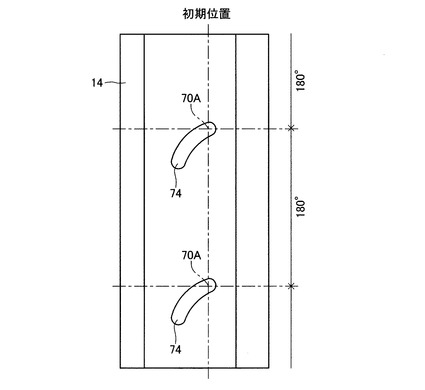
二つのガイド溝72は軸線12の周りに互いに180°隔置されると共に軸線12に平行に直線的に延在しており、従ってガイドローラ76は荷重伝達ロッド70の周りの回転運動を除けば、ガイド溝72内を軸線12に沿って直線的にのみ運動可能である。二つのカム溝74も軸線12の周りに互いに180°隔置されているが、図2に示されている如く、カム溝74は軸線12及び周方向に対し傾斜した状態にて湾曲して延在している。従ってカムローラ78は荷重伝達ロッド70の周りの回転運動を除けば、カム溝74内を軸線12及び周方向に対し傾斜し湾曲した運動軌跡に沿ってのみ運動可能である。
【0049】
入力ロータ14の周りにはブレーキペダル80の円筒部80Aが軸線12に沿って延在するよう配置され、円筒部80Aは入力ロータ14に圧入等の手段により一体的に固定されており、これによりブレーキペダル80は軸線12の周りに枢動可能である。円筒部80Aはカム溝77の外周を塞いでおり、これによりカム溝74は外界と遮断されている。ブレーキペダル80は円筒部80Aとは反対の端部に運転者の足により踏み込み操作されるぺダル部80Bを有し、円筒部80A及びぺダル部80Bはアーム部80Cにより一体に接続されている。尚図には示されていないストッパによりブレーキペダル80の戻り方向の枢動が規制され、これにより非制動時にはブレーキペダル80はストッパにより設定される初期位置に位置決めされるようになっている。
【0050】
かくして図示の第一の実施例に於いては、荷重伝達ロッド70、ガイド溝72、カム溝74、ガイドローラ76等は、互いに共働して入力ロータ14の軸線12の周りの回転運動を軸線12に沿う直線運動に変換して出力ピストン16に伝達し、出力ピストン16を介して圧縮コイルばね68を変形させると共に、圧縮コイルばね68の軸線方向の反力を軸線12の周りにブレーキペダル80を戻す方向に作用する反力として入力ロータ14に伝達する伝達手段82として機能する。
【0051】
特にこの実施例に於ける伝達手段82は、入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比が入力ロータ14の回転運動量の増大につれて漸次増大するよう、入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比を入力ロータ14の回転運動量に応じて変化させることにより、入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比が入力ロータ14の回転運動量の増大につれて漸次増大するよう、入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比を入力ロータ14の回転運動量に応じて変化させる。
【0052】
特に図示の第一の実施例に於いては、二つのガイド溝72及び二つのカム溝74はそれぞれ軸線12の周りに互いに180°隔置された位置に設けられ、ガイド溝72及びカム溝74の図にて右端は軸線12に沿う同一の軸線方向位置に位置している。またブレーキペダル80に対し踏力が与えられない非制動時には、圧縮コイルばね68のばね力が出力ピストン16に与えられることにより、ガイドローラ76及びカムローラ78はそれぞれガイド溝72及びカム溝74の図にて右端に当接する初期位置に位置するようになっている。またガイドローラ76及びカムローラ78が初期位置にあるときには、出力ピストン16は第一のシリンダ室60の容積が最小になり且つ第二のシリンダ室62の容積が最大になって圧縮コイルばね68の圧縮変形量が最小になる初期位置に位置決めされる。
【0053】
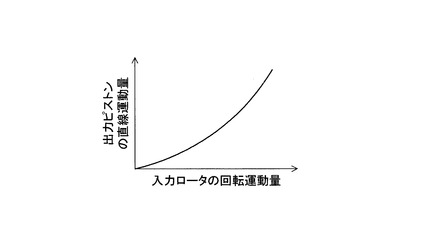
また各カム溝74は図2で見て右端より左端へ向かうにつれて周方向に対する傾斜角が漸次小さくなるよう湾曲して延在している。従って伝達手段82は図4に示されている如く入力ロータ14の軸線12の周りの回転運動量が増大するにつれて入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する圧縮コイルばね68の圧縮変形量の比を漸次増大する。
【0054】
尚運転者の制動操作量は運転者によりブレーキペダル80のぺダル部80Bに与えられる踏力若しくはブレーキペダル80の枢動角度の如き変位量として検出され、運転者の制動操作量に応じて図には示されていない制御装置によって各車輪の制動圧が制御されることにより各車輪の制動力が制御される。このことは後述の第二の実施例についても同様である。
【0055】
上述の如く構成された第一の実施例に於いて、運転者によりブレーキペダル80のぺダル部80Bが踏み込まれることによりブレーキペダル80が軸線12の周りに枢動されると、入力ロータ14がブレーキペダル80の枢動角度と同一の回転角度軸線12の周りに回転駆動され、伝達手段82により入力ロータ14の回転運動が軸線12に沿う直線運動に変換されて出力ピストン16に伝達され、出力ピストン16の直線運動により圧縮コイルばね68が変形される。そして圧縮コイルばね68の軸線方向の反力が伝達手段82により出力ピストン16より軸線12の周りの反力トルクとして入力ロータ14に伝達され、入力ロータ14よりブレーキペダル80へその踏み込み方向とは逆方向の荷重として伝達され、これにより運転者に対し踏み込み操作の反力が与えられる。
【0056】
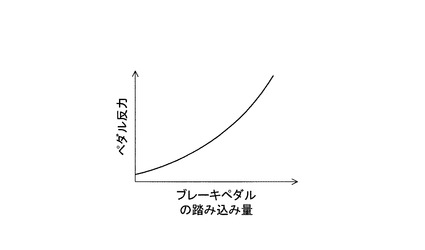
この場合ブレーキペダル80の踏み込み量の増大につれて伝達手段82により入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比が漸次増大されるので、ブレーキペダル80の踏み込み量に対するペダル反力の比が漸次増大し、従ってト圧縮コイルばね68自体のばね特性は線形のばね特性であるが、ブレーキペダル80の踏み込み量に対するペダル反力の特性は図5に示されている如き連続的な非線形の特性になる。
【0057】
かくして図示の第一の実施例によれば、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0058】
特に図示の第一の実施例によれば、入力ロータ14の軸線12の周りの回転運動が伝達手段82によって軸線12に沿う出力ピストン16の直線運動に変換され、反力発生手段としての圧縮コイルばね68が軸線12に沿って変形されるので、例えば反力発生手段が径方向に変形される後述の第二の実施例の場合に比して、ブレーキストロークシミュレータ10の直径を小さくすることができる。
【0059】
また図示の第一の実施例によれば、入力ロータ14はハウジング18外にて回転動可能にハウジング18により支持され、出力ピストン16はハウジング18内にて往復動可能にハウジング18により支持され、入力ロータ14、出力ピストン16、ハウジング18は軸線12に整合して互いに嵌合しているので、例えば入力ロータ14及び出力ピストン16が軸線12に沿って配設されている場合に比して、ストロークシミュレータ10の軸線方向長さを小さくすることができる。尚このことは後述の第三の実施例についても同様である。
【0060】
また図示の第一の実施例によれば、入力ロータ14はハウジング18外にてハウジング18により回転可能に支持され、出力ピストン16はハウジング18内にてハウジング18により往復動可能に支持されているので、入力ロータ14及び出力ピストン16がハウジング内にて互いに他に対し相対的に回転可能且つ往復動可能にハウジングにより支持される構造の場合に比して入力ロータ14及び出力ピストン16の支持剛性を高くすることができる。尚このことも後述の第三の実施例についても同様である。
[第二の実施例]
【0061】
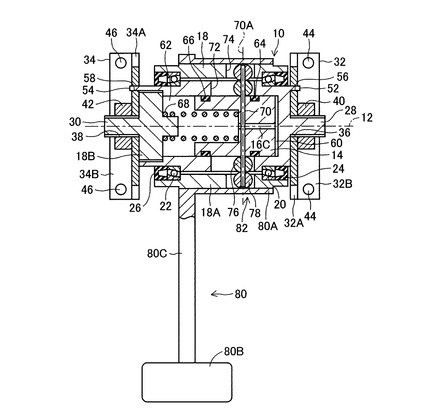
図6はブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第二の実施例を示す軸線に沿う断面図である。尚図6に於いて図1に示された部材と同一の部材には図1に於いて付された符号と同一の符号が付されている。このことは後述の第三の実施例についても同様である。
【0062】
この第二の実施例に於いては、入力ロータ14は円柱状の軸部材84によりアンギュラベアリング20及び22を介して軸線12の周りに回転可能に支持されている。軸部材84は第一の実施例の支持軸28及び30と同様の支持軸86及び88を有し、支持軸86及び88は軸線12に沿って軸部材84の両側に突出している。また支持軸86及び88は雄ねじを有し、それらの雄ねじにはそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに対し軸部材84とは反対の側に於いてナット40及び42が螺合し、これにより軸部材84は取り付けブラケット32及び34によりそれらの間に軸線12の周りに回転不能に支持されている。尚軸部材84には第一の実施例の突起52及び54に対応する突起は設けられていないが、突起52及び54と同様の突起により軸部材84が軸線12の周りに回転することが確実に防止されるようになっていてもよい。
【0063】
入力ロータ14の径方向外側には偏心カム部材90が嵌合し、圧入等の手段により入力ロータ14に固定されている。偏心カム部材90は軸線12に対し平行に偏心した軸線92を中心とする円筒状の外周面を有し、小径部には大径部に当接する状態にてボールベアリング94のインナレースが固定されている。ボールベアリング94のアウタレースは偏心カム部材90を囲繞するよう軸線92に沿って延在する円筒体96の一端部の内周面に圧入等の手段により固定されている。円筒体96の他端には円筒体96の内側に粉塵や泥水の如き異物が侵入することを防止するエンドキャップが圧入等の手段により固定されていてもよい。
【0064】
また軸部材84には軸線12に対し垂直に延在するガイド孔98が設けられており、ガイド孔98は径方向に延在するばね支持ロッド100の径方向内端部を往復動可能に支持している。ばね支持ロッド100の径方向外端部は円筒体96の他端部に圧入等の手段により固定されており、従って円筒体96及びばね支持ロッド100は軸部材84に対し相対的に回転することなく、軸部材84に対し相対的にばね支持ロッド100に沿って直線運動可能に支持されている。
【0065】
ばね支持ロッド100には軸部材84と円筒体96との間にて二つのばね座部材102及び104が嵌合している。ばね座部材102及び104はばね支持ロッド100に対しその長手方向に相対的に変位可能に嵌合しているが、円筒体96の側のばね座部材102はばね支持ロッド100又は円筒体96に固定されていてもよい。ばね座部材102及び104の間には反力発生部材としての圧縮コイルばね106がばね支持ロッド100を囲繞する状態にて弾装されている。
【0066】
特に図示の実施例に於いては、軸線12に対する軸線92の偏心方向、換言すれば偏心カム部材90の偏心方向はばね支持ロッド100に沿うその外端方向に整合している。従ってブレーキペダル80に踏力が与えられておらず、入力ロータ14がその初期位置にあるときには、ばね支持ロッド100の位置に於ける軸部材84と円筒体96との距離が最大になり、これによりばね座部材102及び104の間隔が最大になって、圧縮コイルばね106の圧縮変形量が最小になるようになっている。
【0067】
運転者によってブレーキペダル80が踏み込まれ、入力ロータ14が軸線12の周りに回転されることにより、軸線92が軸線12の周りに回転するよう偏心カム部材90が軸線12の周りに回転すると、円筒体96がばね支持ロッド100に沿って図6で見て下方へ直線運動し、これによりばね支持ロッド100の位置に於ける軸部材84と円筒体96との距離が減少するが、その距離の減少率は偏心カム部材90の回転量が大きくなるにつれて大きくなる。この第二の実施例の他の点は上述の第一の実施例と同様に構成されている。
【0068】
この第二の実施例に於いては、偏心カム部材90、ボールベアリング94、円筒体96、ばね支持ロッド100等は互いに共働して入力ロータ14の軸線12の周りの回転運動を円筒体96の軸線12に垂直な直線運動に変換する伝達手段108を構成しており、円筒体96は反力発生手段としての圧縮コイルばね106を圧縮変形させる出力部材として機能する。また伝達手段108は圧縮コイルばね106により発生された反力を軸線12の周りの反力トルクとして偏心カム部材90及び入力ロータ14へ伝達し、入力ロータ14へ伝達された反力トルクはブレーキペダル80を軸線12の周りに押し戻すトルクとしてブレーキペダル80へ伝達される。
【0069】
またこの第二の実施例に於いては、伝達手段108は入力ロータ14の軸線12の周りの回転運動量が増大するにつれて入力ロータ14の回転運動量に対するばね座部材102及び104の互いに近づく方向の相対直線運動量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する圧縮コイルばね106の圧縮変形量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する反力トルクの比が漸次増大する。
【0070】
かくして図示の第二の実施例によれば、上述の第一の実施例の場合と同様、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0071】
特に図示の第二の実施例によれば、ブレーキペダル80と共に軸線12の周りに回転する入力ロータ14は伝達手段108を構成しておらず、入力ロータ14には上述の第一の実施例に於けるカム溝74は設けられておらず、軸部材84により軸線12の周りに回転可能に支持されているだけであるので、上述の第一の実施例の場合に比してブレーキペダル80の支持剛性を高くすることができる。
[第三の実施例]
【0072】
図7はマスタシリンダ内蔵型のブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第三の実施例を示す軸線に沿う断面図である。
【0073】
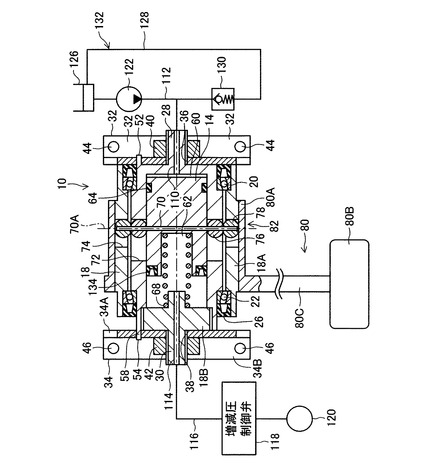
この第三の実施例に於いては、ハウジング18の本体18Aの端壁及び支持軸28には軸線12に沿って延在し一端にて第一のシリンダ室60に連通する連通孔110が設けられており、連通孔110には高圧導管112の一端が接続されている。同様に、ハウジング18のエンドキャップ18B及び支持軸30には軸線12に沿って延在し一端にて第二のシリンダ室62に連通する連通孔114が設けられており、連通孔114にはブレーキ液圧供給導管116の一端が接続されている。ブレーキ液圧供給導管116の他端は車両の各車輪に対応して設けられた周知の増減圧制御弁118を介して制動力発生装置120のホイールシリンダ122に接続されている。
【0074】
高圧導管112の他端はオイルポンプ124の吐出口に接続されており、オイルポンプ124の吸入口は低圧導管126によりオイルを貯留するリザーバ128に接続されている。高圧導管112にはリターン導管130の一端が接続され、リターン導管130の他端はリザーバ128に接続されている。リターン導管130の途中には常開のリニアソレノイド弁132が設けられている。リニアソレノイド弁132は図には示されていない電子制御装置によって制御されることにより、リニアソレノイド弁132に於ける差圧を制御し、これにより高圧導管112内の圧力、従って第一のシリンダ室60内のオイルの圧力を制御する。従ってオイルポンプ124、リニアソレノイド弁132、電子制御装置等は互いに共働して必要に応じて第一のシリンダ室60内のオイルの圧力を制御する圧力制御装置134を構成している。
【0075】
尚圧力制御装置134は運転者のブレーキペダル80の踏み込み操作をアシストする制御の如く任意の要領にて制御されてよい。例えば運転者がブレーキペダル80を踏み込むことによる制動操作量が図7には示されていない踏力センサ若しくはストロークセンサにより検出され、制動操作量に基づき目標制動圧、即ちホイールシリンダ122内の目標圧力が演算され、目標圧力と圧力センサにより検出されるホイールシリンダ122内の実際の圧力との偏差が演算され、該偏差が0になるよう第一のシリンダ室60内の圧力が制御されてよい。
【0076】
また図7に示されている如く、この第三の実施例に於ける出力ピストン16には上述の第一の実施例に於ける連通孔16Cに相当する連通孔及び減摩リング66は設けられておらず、出力ピストン16の第二のシリンダ室62の側の端部には軸線12の周りに環状に延在するカップシール136が装着されている。カップシール136はゴムの如き弾性材よりなり、出力ピストン16がハウジング18に対し相対的に軸線12に沿って直線運動することを許しつつ第二のシリンダ室62を第一のシリンダ室60及びガイド溝72より遮断している。尚第二のシリンダ室62もオイルにて充填されている。またこの第三の実施例の他の点は上述の第一の実施例と同様に構成されている。
【0077】
かくして図示の第三の実施例に於いては、上述の第一の実施例と同様の作用効果を得ることができ、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0078】
また図示の第三の実施例によれば、ブレーキペダル80が踏み込まれることにより出力ピストン16がエンドキャップ18Bへ向けて駆動されると、第二のシリンダ室62内のオイルがブレーキペダル80に対する踏力に応じて加圧され、踏力に応じた圧力のオイルをホイールシリンダ122へ供給することができるので、出力ピストン16及びハウジング18はマスタシリンダ138としても機能し、従ってストロークシミュレータ10をマスタシリンダ内蔵型のブレーキストロークシミュレータとして機能させることができる。
【0079】
特に図示の第三の実施例によれば、第一のシリンダ室60は連通孔110を介して圧力制御装置134に接続されており、第一のシリンダ室60内の圧力を圧力制御装置134によって制御することができるので、運転者によるブレーキペダル80の踏み込み操作をアシストしたり、運転者によるブレーキペダル80の踏み込み操作に依存せずに制動圧を制御したりすることができる。
【0080】
またホイールシリンダ122を含む制動力発生装置120はホイールシリンダ122内の圧力に応じてブレーキパッドの如き摩擦材をブレーキロータの如き車輪と共に回転する回転部材に押し付けることにより制動力を発生し、その際制動力発生装置120の構成部品がホイールシリンダ122内の圧力に比例して弾性変形し、反力を発生する。従って図7に於いて仮想線にて示されている如く、制動力発生装置120はピストン120Aが線形のばね特性を有する圧縮コイルばね120Bによりシリンダ室120Cの容積を低減する方向へ付勢されたシリンダ−ピストン装置と等価なものと考えることができる。
【0081】
よってこの第三の実施例に於いては、制動力発生装置120も反力発生手段として作用し、出力ピストン16の直線運動がブレーキ液圧供給導管116内のオイルを介して制動力発生装置120のピストン120Aへ伝達され、ピストン120Aが出力部材として機能し圧縮コイルばね120Bを変形させると考えることができる。また圧縮コイルばね120Bの反力がピストン120A、ブレーキ液圧供給導管116及び第二のシリンダ室62内のオイルの圧力を介して出力ピストン16へ伝達されると考えることができる。
【0082】
尚上述の第一乃至第三の実施例によれば、伝達手段82により入力ロータ14の軸線12の周りの回転運動が出力ピストン16の軸線12に沿う直線運動に変換され、圧縮コイルばね68が軸線12に沿って圧縮変形されるので、軸線12を基準にして全ての構成部材を配設することができる。
【0083】
また上述の第一乃至第三の実施例によれば、出力ピストン16が圧縮コイルばね68によって図にて右方へ付勢されることにより、入力ロータ14が初期位置にあるときには、荷重伝達ロッド70等が右端の初期位置に位置決めされるので、非制動時に出力ピストン16ががたつくことを効果的に防止することができる。
【0084】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0085】
例えば上述の第一及び第二の実施例に於いては、本発明による操作シミュレータはブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成されているが、第一及び第二の実施例はブレーキペダル80のアーム部80Cにマスタシリンダ装置のオペレーションロッドが枢着されることにより、液圧式ブレーキ装置に適用されてもよい。
【0086】
また上述の第三の実施例に於いては、第一のシリンダ室60は連通孔110を介して圧力制御装置134に接続され、第一のシリンダ室60内の圧力が圧力制御装置134によって制御されるようになっているが、連通孔110及び圧力制御装置134が省略されてもよい。また逆に上述の第一の実施例は第三の実施例に於ける連通孔110及び圧力制御装置134と同様の連通孔及び圧力制御装置が付加され、オペレータの操作がアシストされるよう修正されてもよい。
【0087】
また上述の第三の実施例に於いては、第二のシリンダ室62内に圧縮コイルばね68が弾装されているが、上述の如く制動力発生装置120が反力発生手段として作用するので、反力発生手段としての圧縮コイルばね68が省略されてもよい。またその場合にはブレーキペダル80を踏み込み方向とは反対の方向へ付勢する復帰ばねがアーム部80Cと車体との間に配設されてもよい。
【0088】
また上述の第一及び第三の実施例に於いては、入力ロータ14はハウジング18外にてハウジング18により回転可能に支持され、出力ピストン16はハウジング18内にてハウジング18により往復動可能に支持されているが、入力ロータ14もハウジング18内に収容され、入力ロータ14及び出力ピストン16がハウジング内にて互いに他に対し相対的に回転可能且つ往復動可能にハウジングにより支持されるよう修正されてもよい。
【0089】
更に上述の各実施例に於いては、操作シミュレータはブレーキストロークシミュレータであり、入力ロータ14は運転者の制動操作によって軸線12の周りに回転駆動されるようになっているが、本発明の操作シミュレータは例えば自動車のアクセルペダルの如くオペレータによる操作手段の操作を許すと共に操作手段を介してオペレータに所要の操作反力を与える操作シミュレータに適用されてよく、操作手段としてのブレーキペダル80は軸線12の周りに枢動される枢動操作手段であるが、操作手段は軸線12の周りに回転される回転操作手段であってもよい。
【図面の簡単な説明】
【0090】
【図1】ブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第一の実施例を示す軸線に沿う断面図である。
【図2】第一の実施例の出力ロータを平面に展開して示す展開図である。
【図3】車両に搭載された状態にて第一の実施例の操作シミュレータを示す解図的側面図である。
【図4】入力ロータの回転運動量と出力ピストンの直線運動量との間の関係を示すグラフである。
【図5】ブレーキペダルの踏み込み量とペダル反力との間の関係を示すグラフである。
【図6】ブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第二の実施例を示す軸線に沿う断面図である。
【図7】マスタシリンダ内蔵型のブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第三の実施例を示す軸線に沿う断面図である。
【符号の説明】
【0091】
10…ブレーキストロークシミュレータ、14…入力ロータ、16…出力ピストン、18…ハウジング、28、30…支持軸、32、34…取り付けブラケット、60…第一のシリンダ室、62…第二のシリンダ室、68…圧縮コイルばね、70…荷重伝達ロッド、72…ガイド溝、74…カム溝、76…ガイドローラ、78…カムローラ、80…ブレーキペダル、82…伝達手段、84…軸部材、90…偏心カム部材、100…ばね支持ロッド、106…圧縮コイルばね、120…制動力発生装置、124…オイルポンプ、132…リニアソレノイド弁、134…圧力制御装置、138…マスタシリンダ
【技術分野】
【0001】
本発明は、操作シミュレータに係り、更に詳細には自動車等の車両のブレーキ装置のブレーキストロークシミュレータの如く、オペレータによる操作手段の操作を許すと共に操作手段を介してオペレータに所要の操作反力を与える回転運動入力型操作シミュレータに係る。
【背景技術】
【0002】
自動車等の車両のブレーキ装置に於いては、運転者がブレーキペダルを踏み込むことにより制動操作が行われ、運転者の制動操作量に基づいて各車輪の制動圧が制御されるブレーキ装置の場合には、一般に、運転者が感じる操作反力は運転者の制動操作量の増大につれて操作反力の増大率が漸次増大し、これにより運転者の制動操作量(ブレーキストローク)と操作反力(ブレーキ反力)との関係が非線形であることが好ましい。
【0003】
かかるブレーキストローク−ブレーキ反力の非線形特性を達成するブレーキストロークシミュレータは従来より種々の構成のものが提案されており、例えば下記の特許文献1にはブレーキストローク・ブレーキ反力の非線形特性を調節し得るよう構成されたブレーキストロークシミュレータが記載されている。
【特許文献1】特開2005−112034号公報
【発明の開示】
【0004】
ブレーキストローク−ブレーキ反力の関係が非線形である従来のブレーキストロークシミュレータは、一般に、ばね定数が一定で互いに異なる複数の反力発生ばねを有し、ブレーキストロークによって反力発生ばね全体としてのばね定数が異なることにより非線形特性を達成するようになっている。そのためブレーキストロークに対するブレーキ反力の関係が不連続な非線形であり、好ましい連続的な非線形ではないという問題がある。
【0005】
またブレーキストロークに対するブレーキ反力の関係を連続的な非線形にすべく、非線形のばね特性を有する一つの反力発生ばねを使用することが考えられるが、ブレーキストロークの全域に亘りブレーキストロークに対するブレーキ反力の関係を好ましい連続的な非線形にする反力発生ばねを形成することが非常に困難である。
【0006】
尚、ブレーキストローク−ブレーキ反力の非線形特性に関する上述の問題は、ブレーキストロークシミュレータに限られるものではなく、操作手段がオペレータによって操作され、オペレータによる操作手段の操作を許容すると共に、操作手段を介して運転者に操作反力を付与するフライトシミュレータの如き他の操作シミュレータについても同様に存在する。
本発明は、従来の操作シミュレータに於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は、操作手段に対するオペレータの操作量と反力発生ばねに対する変形量との関係を連続的な非線形の関係にすることにより、反力発生ばねが線形的なばね特性を有するものであっても操作手段に対する操作の全域に亘り操作量と操作反力との関係として好ましい連続的な非線形特性を達成する回転運動入力型操作シミュレータを提供することである。
〔課題を解決するための手段及び発明の効果〕
【0007】
上述の主要な課題は、本発明によれば、請求項1の構成、即ち軸線の周りに回転運動する入力部材と、オペレータによって操作されることにより軸線の周りに回転し前記入力部材に回転運動を付与する操作手段と、変形量に応じて反力を発生する反力発生手段を直線運動することにより変形させる出力部材と、前記入力部材と前記出力部材との間に設けられ前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達すると共に、前記反力発生手段の反力を前記出力部材を介して前記入力部材に伝達する伝達手段とを有し、オペレータによる前記操作手段の操作を許容すると共に、前記操作手段を介してオペレータに操作反力を付与する回転運動入力型操作シミュレータにして、前記反力発生手段は変形量に応じて線形的に反力を発生し、前記伝達手段は前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成されていることを特徴とする回転運動入力型操作シミュレータによって達成される。
【0008】
上記請求項1の構成によれば、伝達手段は入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させるので、入力部材の回転運動量に対する反力発生手段の変形量の比を入力部材の回転運動量に応じて連続的に非線形に変化させることができ、従って反力発生手段がその変形量に応じて線形的に反力を発生するものであっても、入力部材の回転運動量に対する反力発生手段の反力の関係を所望の連続的な非線形の関係にすることができ、これにより操作手段に対する操作の全域に亘り操作量と操作反力との関係として好ましい連続的な非線形特性を達成することができる。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記伝達手段は前記入力部材に設けられたカムと、前記出力部材に設けられ前記カムに係合するカムフォロアとを有し、前記カムフォロアが前記カムに従動することにより前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成される(請求項2の構成)。
【0010】
上記請求項2の構成によれば、カムフォロアがカムに従動することにより入力部材の回転運動量に対する出力部材の直線運動量の比が入力部材の回転運動量に応じて連続的に非線形に変化されるので、入力部材の回転運動量に対する出力部材の直線運動量の比を確実に入力部材の回転運動量に応じて連続的に非線形に変化させることができると共に、カム及びカムフォロアの設定によって所望の連続的な非線形特性を達成することができる。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、前記入力部材及び前記出力部材は前記軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合しているよう構成される(請求項3の構成)。
【0012】
上記請求項3の構成によれば、入力部材及び出力部材は軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合しているので、例えば入力部材及び出力部材が軸線に沿って配設された構造の場合に比して、操作シミュレータの軸線方向の長さを低減し、操作シミュレータをコンパクト化することができる。
【0013】
また本発明によれば、上記請求項1乃至3の何れかの構成に於いて、前記伝達手段は前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達し、前記出力部材が前記反力発生手段より受けた反力を前記入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換して前記入力部材に伝達するよう構成される(請求項4の構成)。
【0014】
上記請求項4の構成によれば、入力部材の回転運動が直線運動に変換されて出力部材に伝達され、出力部材が反力発生手段より受けた反力が入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換されて入力部材に伝達されるので、反力発生手段が出力部材の直線運動方向に変形されることにより発生された反力を操作手段の枢動操作量増大方向とは逆方向の反力として確実に操作手段に伝達させることができる。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項2乃至4の何れかの構成に於いて、前記カム及び前記カムフォロアの一方はカム溝であり、前記カム及び前記カムフォロアの他方は前記カム溝に係合し前記カム溝に沿って移動するカム溝係合部材であり、前記カム溝は前記軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲しているよう構成される(請求項5の構成)。
【0016】
上記請求項5の構成によれば、カム溝係合部材がカム溝に係合しカム溝に沿って移動し、カム溝は軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲しているので、カム溝係合部材がカム溝に係合した状態にてカム溝に沿って移動することにより入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させることができ、従ってカム溝の湾曲形状の設定によって所望の連続的な非線形特性を達成することができる。
【0017】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3乃至5の何れかの構成に於いて、前記反力発生手段は前記軸線に沿う方向の変形を受けることにより変形量に応じて線形的に前記軸線に沿う方向の反力を発生するよう構成される(請求項6の構成)。
【0018】
上記請求項6の構成によれば、反力発生手段は軸線に沿う方向の変形を受けることにより変形量に応じて線形的に軸線に沿う方向の反力を発生するので、出力部材の軸線に沿う方向の直線運動量に応じて線形的に増減する軸線に沿う方向の反力を出力部材に対し付与することができる。
【0019】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至6の何れかの構成に於いて、前記入力部材はハウジングにより直線運動可能に支持され、前記ハウジングと共働して両側に二つのシリンダ室を郭定しており、前記入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されているよう構成される(請求項7の構成)。
【0020】
上記請求項7の構成によれば、入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されているので、入力部材の回転運動量に対する作動流体の供給量の比が入力部材の回転運動量の増大に伴って漸次増大するよう、作動流体の圧力にて作動する装置へ作動流体を供給することができ、これにより操作手段に対するオペレータの操作量に対する作動流体の供給量の比が入力部材の回転運動量の増大に伴って漸次増大するよう、作動流体の圧力にて作動する装置へ作動流体を供給することができる。
【0021】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項7の構成に於いて、前記入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室は該シリンダ室内の圧力を制御する手段に連通接続されているよう構成される(請求項8の構成)。
【0022】
上記請求項8の構成によれば、入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室内の圧力を制御することができ、これにより操作手段に対するオペレータの操作を補助することができると共に、操作手段に対するオペレータの操作に依存せずに作動流体の圧力にて作動する装置へ作動流体を供給することができる。
【0023】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至4の何れかの構成に於いて、前記伝達手段は前記入力部材の回転運動を前記軸線を横切る方向の直線運動に変換して前記出力部材に伝達するよう構成される(請求項9の構成)。
【0024】
上記請求項9の構成によれば、入力部材の回転運動が軸線を横切る方向の直線運動に変換されて出力部材に伝達されるので、出力部材の直線運動の方向を軸線を横切る方向に設定することができ、従って出力部材による反力発生手段に対する変形方向を軸線を横切る方向に設定することができる。
【0025】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項5乃至8の何れかの構成に於いて、前記カム溝係合部材は出力部材に固定され径方向に延在する軸部材と、前記軸部材に回転可能に支持され前記カム溝の壁面に転動可能に係合するカムローラとを有するよう構成される(請求項10の構成)。
【0026】
上記請求項10の構成によれば、カム溝係合部材は出力部材に固定され径方向に延在する軸部材と、軸部材に回転可能に支持されカム溝の壁面に転動可能に係合するカムローラとを有するので、カム溝係合部材がカム溝の壁面に転動可能に係合していない構造の場合に比して、カム溝係合部材とカム溝の壁面との間の摩擦を低減し、入力部材の回転運動と出力部材の直線運動との間の運動変換を円滑に行わせることができる。
【0027】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項10の構成に於いて、前記カム溝係合部材は前記軸部材に回転可能に支持され前記出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有するよう構成される(請求項11の構成)。
【0028】
上記請求項11の構成によれば、カム溝係合部材は軸部材に回転可能に支持され出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有するので、ガイド溝の壁面に転動可能に係合するガイドローラを有しない構造の場合に比して、軸部材を確実に出力部材の直線運動の方向に沿って移動させることができ、これにより入力部材の回転運動と出力部材の直線運動との間の運動変換を円滑に行わせることができる。
〔課題解決手段の好ましい態様〕
【0029】
本発明の一つの好ましい態様によれば、上記請求項1乃至11の何れかの構成に於いて、伝達手段は入力部材の回転運動量に対する出力部材の直線運動量の比が入力部材の回転運動量の増大につれて漸次増大するよう、入力部材の回転運動量に対する出力部材の直線運動量の比を入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成される(好ましい態様1)。
【0030】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至11又は上記好ましい態様1の何れかの構成に於いて、操作手段は軸線の周りに枢動するよう構成される(好ましい態様2)。
【0031】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至11又は上記好ましい態様1又は2の何れかの構成に於いて、操作手段は一端にて入力部材に一体的に連結されているよう構成される(好ましい態様3)。
【0032】
本発明の他の一つの好ましい態様によれば、上記請求項3乃至8又は10又は11又は上記好ましい態様1乃至3の何れかの構成に於いて、入力部材はハウジングを囲繞する状態にてハウジングにより軸線の周りに回転可能に支持され、出力部材はハウジング内にて軸線に沿って直線運動可能にハウジングにより支持されているよう構成される(好ましい態様4)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至4の何れかの構成に於いて、軸線の周りに等間隔に隔置された複数のカム溝及びカム溝係合部材が設けられているよう構成される(好ましい態様5)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至5の何れかの構成に於いて、カム溝は入力部材に設けられ、カム溝係合部材は出力部材により支持されているよう構成される(好ましい態様6)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項5乃至8又は10又は11又は上記好ましい態様1乃至6の何れかの構成に於いて、作動流体の圧力にて作動する装置は作動流体の圧力に応じた反力を出力部材に付与することにより反力発生手段として作用するよう構成される(好ましい態様7)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項9又は上記好ましい態様1乃至3の何れかの構成に於いて、伝達手段は偏心カムにより入力部材の回転運動を軸線を横切る方向の直線運動に変換して出力部材に伝達するよう構成される(好ましい態様8)。
【0037】
本発明の他の一つの好ましい態様によれば、上記請求項11又は上記好ましい態様1乃至7の何れかの構成に於いて、入力部材はハウジングを囲繞する状態にてハウジングにより軸線の周りに回転可能に支持され、ガイド溝はハウジングに設けられているよう構成される(好ましい態様9)。
【発明を実施するための最良の形態】
【0038】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施例について詳細に説明する。
[第一の実施例]
【0039】
図1はブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第一の実施例を示す軸線に沿う断面図、図2は第一の実施例の出力ロータを平面に展開して示す展開図、図3は車両に搭載された状態にて第一の実施例の操作シミュレータを示す解図的側面図である。
【0040】
これらの図に於いて、10はブレーキストロークシミュレータを全体的に示しており、ストロークシミュレータ10は軸線12の周りに回転可能な入力部材としての入力ロータ14と、軸線12に沿って直線運動可能な出力部材としての出力ピストン16と、入力ロータ14を軸線12の周りに回転可能に支持すると共に、出力ピストン16を軸線12に沿って直線運動可能に支持するハウジング18とを有している。
【0041】
ハウジング18は一端にて開口し軸線12に沿って延在する円筒形の本体18Aと、本体18Aの開口端にねじ込み又は圧入等の手段により固定されたエンドキャップ18Bとよりなっている。入力ロータ14はハウジング18の円筒部にその外側にて遊嵌合し、その軸線に沿う両端部にて本体18Aとの間に設けられたアンギュラベアリング20及び22によりハウジング18に対し相対的に軸線12の周りに回転可能に支持されている。
【0042】
アンギュラベアリング20及び22は入力ロータ14がハウジング18に対し相対的に軸線12の周りに回転することを許すが、入力ロータ14がハウジング18に対し相対的に軸線12に沿って移動することを阻止する。アンギュラベアリング20及び22に対し軸線方向外側には軸線12の周りに環状に延在するカップシール24及び26が装着されている。カップシール24及び26はゴムの如き弾性材よりなり、入力ロータ14がハウジング18に対し相対的に軸線12の周りに回転することを許しつつアンギュラベアリング20及び22に粉塵や泥水等の異物が侵入することを阻止する。
【0043】
本体18Aの端壁及びエンドキャップ18Bにはそれぞれ軸線12に沿って互いに離れる方向へ突出する支持軸28及び30が一体に設けられている。支持軸28及び30はそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに設けられた孔36及び38に挿通されている。また支持軸28及び30は雄ねじを有し、それらの雄ねじにはそれぞれ耳部32A及び34Aに対し本体18Aの端壁及びエンドキャップ18Bとは反対の側に於いてナット40及び42が螺合し、これによりハウジング18は取り付けブラケット32及び34によりそれらの間に支持されている。
【0044】
取り付けブラケット32及び34はそれぞれ耳部32A及び34Aに対し垂直に延在するベース部32B及び34Bを有し、ベース部32B及び34Bの両端近傍には二つのボルト孔44及び46が設けられている。図3に示されている如く、取り付けブラケット32及び34はボルト孔44及び46に挿通されたボルト48により車体50に取り付けられるようになっている。
【0045】
特に図示の実施例に於いては、本体18A及びエンドキャップ18Bにはそれぞれ支持軸28及び30より径方向外方へ隔置された位置に於いて軸線12に沿って支持軸28及び30の突出方向に突出する突起52及び54が一体に設けられている。突起52及び54はそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに設けられた係合孔56及び58に挿通され、これによりハウジング18が軸線12の周りに回転することが確実に防止されるようになっている。
【0046】
出力ピストン16はハウジング18の円筒部内に軸線12に沿って往復動可能に配置されており、エンドキャップ18Bの側へ向けて開いたコの字形の断面形状を有している。出力ピストン16はハウジング18と共働して第一のシリンダ室60及び第二のシリンダ室62を郭定しており、これらのシリンダ室は出力ピストン16に設けられた連通孔16Cにより互いに連通接続されている。出力ピストン16の両端部の外周にはテフロン(登録商標)リングの如き減摩リング64及び66が装着されており、減摩リング64及び66は出力ピストン16がハウジング18に対し相対的に直線運動する際の摩擦抵抗を低減する。第二のシリンダ室62内にて出力ピストン16とエンドキャップ18Bとの間には反力発生手段としての圧縮コイルばね68が弾装されており、圧縮コイルばね68は線形のばね特性を有し、軸線12に沿って延在している。
【0047】
荷重伝達ロッド70が出力ピストン16を貫通して軸線12に垂直に延在し、圧入等の手段により出力ピストン16に固定されている。荷重伝達ロッド70の両端部はハウジング18の円筒状の側壁に設けられたガイド溝72を貫通して入力ロータ14に設けられたカム溝74内まで延在している。また荷重伝達ロッド70の両端部は実質的に球形のガイドローラ76及びカムローラ78を自らの軸線70Aの周りに回転可能に支持している。各ガイドローラ76は対応するガイド溝72の壁面に転動可能に係合し、各カムローラ78はカム溝74の壁面に転動可能に係合している。ガイド溝72及びカム溝74の幅はそれぞれガイドローラ76及びカムローラ78の最大直径よりも極僅かに大きい値に設定されている。
【0048】
二つのガイド溝72は軸線12の周りに互いに180°隔置されると共に軸線12に平行に直線的に延在しており、従ってガイドローラ76は荷重伝達ロッド70の周りの回転運動を除けば、ガイド溝72内を軸線12に沿って直線的にのみ運動可能である。二つのカム溝74も軸線12の周りに互いに180°隔置されているが、図2に示されている如く、カム溝74は軸線12及び周方向に対し傾斜した状態にて湾曲して延在している。従ってカムローラ78は荷重伝達ロッド70の周りの回転運動を除けば、カム溝74内を軸線12及び周方向に対し傾斜し湾曲した運動軌跡に沿ってのみ運動可能である。
【0049】
入力ロータ14の周りにはブレーキペダル80の円筒部80Aが軸線12に沿って延在するよう配置され、円筒部80Aは入力ロータ14に圧入等の手段により一体的に固定されており、これによりブレーキペダル80は軸線12の周りに枢動可能である。円筒部80Aはカム溝77の外周を塞いでおり、これによりカム溝74は外界と遮断されている。ブレーキペダル80は円筒部80Aとは反対の端部に運転者の足により踏み込み操作されるぺダル部80Bを有し、円筒部80A及びぺダル部80Bはアーム部80Cにより一体に接続されている。尚図には示されていないストッパによりブレーキペダル80の戻り方向の枢動が規制され、これにより非制動時にはブレーキペダル80はストッパにより設定される初期位置に位置決めされるようになっている。
【0050】
かくして図示の第一の実施例に於いては、荷重伝達ロッド70、ガイド溝72、カム溝74、ガイドローラ76等は、互いに共働して入力ロータ14の軸線12の周りの回転運動を軸線12に沿う直線運動に変換して出力ピストン16に伝達し、出力ピストン16を介して圧縮コイルばね68を変形させると共に、圧縮コイルばね68の軸線方向の反力を軸線12の周りにブレーキペダル80を戻す方向に作用する反力として入力ロータ14に伝達する伝達手段82として機能する。
【0051】
特にこの実施例に於ける伝達手段82は、入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比が入力ロータ14の回転運動量の増大につれて漸次増大するよう、入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比を入力ロータ14の回転運動量に応じて変化させることにより、入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比が入力ロータ14の回転運動量の増大につれて漸次増大するよう、入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比を入力ロータ14の回転運動量に応じて変化させる。
【0052】
特に図示の第一の実施例に於いては、二つのガイド溝72及び二つのカム溝74はそれぞれ軸線12の周りに互いに180°隔置された位置に設けられ、ガイド溝72及びカム溝74の図にて右端は軸線12に沿う同一の軸線方向位置に位置している。またブレーキペダル80に対し踏力が与えられない非制動時には、圧縮コイルばね68のばね力が出力ピストン16に与えられることにより、ガイドローラ76及びカムローラ78はそれぞれガイド溝72及びカム溝74の図にて右端に当接する初期位置に位置するようになっている。またガイドローラ76及びカムローラ78が初期位置にあるときには、出力ピストン16は第一のシリンダ室60の容積が最小になり且つ第二のシリンダ室62の容積が最大になって圧縮コイルばね68の圧縮変形量が最小になる初期位置に位置決めされる。
【0053】
また各カム溝74は図2で見て右端より左端へ向かうにつれて周方向に対する傾斜角が漸次小さくなるよう湾曲して延在している。従って伝達手段82は図4に示されている如く入力ロータ14の軸線12の周りの回転運動量が増大するにつれて入力ロータ14の回転運動量に対する出力ピストン16の直線運動量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する圧縮コイルばね68の圧縮変形量の比を漸次増大する。
【0054】
尚運転者の制動操作量は運転者によりブレーキペダル80のぺダル部80Bに与えられる踏力若しくはブレーキペダル80の枢動角度の如き変位量として検出され、運転者の制動操作量に応じて図には示されていない制御装置によって各車輪の制動圧が制御されることにより各車輪の制動力が制御される。このことは後述の第二の実施例についても同様である。
【0055】
上述の如く構成された第一の実施例に於いて、運転者によりブレーキペダル80のぺダル部80Bが踏み込まれることによりブレーキペダル80が軸線12の周りに枢動されると、入力ロータ14がブレーキペダル80の枢動角度と同一の回転角度軸線12の周りに回転駆動され、伝達手段82により入力ロータ14の回転運動が軸線12に沿う直線運動に変換されて出力ピストン16に伝達され、出力ピストン16の直線運動により圧縮コイルばね68が変形される。そして圧縮コイルばね68の軸線方向の反力が伝達手段82により出力ピストン16より軸線12の周りの反力トルクとして入力ロータ14に伝達され、入力ロータ14よりブレーキペダル80へその踏み込み方向とは逆方向の荷重として伝達され、これにより運転者に対し踏み込み操作の反力が与えられる。
【0056】
この場合ブレーキペダル80の踏み込み量の増大につれて伝達手段82により入力ロータ14の軸線12の周りの回転運動量に対する圧縮コイルばね68の変形量の比が漸次増大されるので、ブレーキペダル80の踏み込み量に対するペダル反力の比が漸次増大し、従ってト圧縮コイルばね68自体のばね特性は線形のばね特性であるが、ブレーキペダル80の踏み込み量に対するペダル反力の特性は図5に示されている如き連続的な非線形の特性になる。
【0057】
かくして図示の第一の実施例によれば、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0058】
特に図示の第一の実施例によれば、入力ロータ14の軸線12の周りの回転運動が伝達手段82によって軸線12に沿う出力ピストン16の直線運動に変換され、反力発生手段としての圧縮コイルばね68が軸線12に沿って変形されるので、例えば反力発生手段が径方向に変形される後述の第二の実施例の場合に比して、ブレーキストロークシミュレータ10の直径を小さくすることができる。
【0059】
また図示の第一の実施例によれば、入力ロータ14はハウジング18外にて回転動可能にハウジング18により支持され、出力ピストン16はハウジング18内にて往復動可能にハウジング18により支持され、入力ロータ14、出力ピストン16、ハウジング18は軸線12に整合して互いに嵌合しているので、例えば入力ロータ14及び出力ピストン16が軸線12に沿って配設されている場合に比して、ストロークシミュレータ10の軸線方向長さを小さくすることができる。尚このことは後述の第三の実施例についても同様である。
【0060】
また図示の第一の実施例によれば、入力ロータ14はハウジング18外にてハウジング18により回転可能に支持され、出力ピストン16はハウジング18内にてハウジング18により往復動可能に支持されているので、入力ロータ14及び出力ピストン16がハウジング内にて互いに他に対し相対的に回転可能且つ往復動可能にハウジングにより支持される構造の場合に比して入力ロータ14及び出力ピストン16の支持剛性を高くすることができる。尚このことも後述の第三の実施例についても同様である。
[第二の実施例]
【0061】
図6はブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第二の実施例を示す軸線に沿う断面図である。尚図6に於いて図1に示された部材と同一の部材には図1に於いて付された符号と同一の符号が付されている。このことは後述の第三の実施例についても同様である。
【0062】
この第二の実施例に於いては、入力ロータ14は円柱状の軸部材84によりアンギュラベアリング20及び22を介して軸線12の周りに回転可能に支持されている。軸部材84は第一の実施例の支持軸28及び30と同様の支持軸86及び88を有し、支持軸86及び88は軸線12に沿って軸部材84の両側に突出している。また支持軸86及び88は雄ねじを有し、それらの雄ねじにはそれぞれ取り付けブラケット32及び34の耳部32A及び34Aに対し軸部材84とは反対の側に於いてナット40及び42が螺合し、これにより軸部材84は取り付けブラケット32及び34によりそれらの間に軸線12の周りに回転不能に支持されている。尚軸部材84には第一の実施例の突起52及び54に対応する突起は設けられていないが、突起52及び54と同様の突起により軸部材84が軸線12の周りに回転することが確実に防止されるようになっていてもよい。
【0063】
入力ロータ14の径方向外側には偏心カム部材90が嵌合し、圧入等の手段により入力ロータ14に固定されている。偏心カム部材90は軸線12に対し平行に偏心した軸線92を中心とする円筒状の外周面を有し、小径部には大径部に当接する状態にてボールベアリング94のインナレースが固定されている。ボールベアリング94のアウタレースは偏心カム部材90を囲繞するよう軸線92に沿って延在する円筒体96の一端部の内周面に圧入等の手段により固定されている。円筒体96の他端には円筒体96の内側に粉塵や泥水の如き異物が侵入することを防止するエンドキャップが圧入等の手段により固定されていてもよい。
【0064】
また軸部材84には軸線12に対し垂直に延在するガイド孔98が設けられており、ガイド孔98は径方向に延在するばね支持ロッド100の径方向内端部を往復動可能に支持している。ばね支持ロッド100の径方向外端部は円筒体96の他端部に圧入等の手段により固定されており、従って円筒体96及びばね支持ロッド100は軸部材84に対し相対的に回転することなく、軸部材84に対し相対的にばね支持ロッド100に沿って直線運動可能に支持されている。
【0065】
ばね支持ロッド100には軸部材84と円筒体96との間にて二つのばね座部材102及び104が嵌合している。ばね座部材102及び104はばね支持ロッド100に対しその長手方向に相対的に変位可能に嵌合しているが、円筒体96の側のばね座部材102はばね支持ロッド100又は円筒体96に固定されていてもよい。ばね座部材102及び104の間には反力発生部材としての圧縮コイルばね106がばね支持ロッド100を囲繞する状態にて弾装されている。
【0066】
特に図示の実施例に於いては、軸線12に対する軸線92の偏心方向、換言すれば偏心カム部材90の偏心方向はばね支持ロッド100に沿うその外端方向に整合している。従ってブレーキペダル80に踏力が与えられておらず、入力ロータ14がその初期位置にあるときには、ばね支持ロッド100の位置に於ける軸部材84と円筒体96との距離が最大になり、これによりばね座部材102及び104の間隔が最大になって、圧縮コイルばね106の圧縮変形量が最小になるようになっている。
【0067】
運転者によってブレーキペダル80が踏み込まれ、入力ロータ14が軸線12の周りに回転されることにより、軸線92が軸線12の周りに回転するよう偏心カム部材90が軸線12の周りに回転すると、円筒体96がばね支持ロッド100に沿って図6で見て下方へ直線運動し、これによりばね支持ロッド100の位置に於ける軸部材84と円筒体96との距離が減少するが、その距離の減少率は偏心カム部材90の回転量が大きくなるにつれて大きくなる。この第二の実施例の他の点は上述の第一の実施例と同様に構成されている。
【0068】
この第二の実施例に於いては、偏心カム部材90、ボールベアリング94、円筒体96、ばね支持ロッド100等は互いに共働して入力ロータ14の軸線12の周りの回転運動を円筒体96の軸線12に垂直な直線運動に変換する伝達手段108を構成しており、円筒体96は反力発生手段としての圧縮コイルばね106を圧縮変形させる出力部材として機能する。また伝達手段108は圧縮コイルばね106により発生された反力を軸線12の周りの反力トルクとして偏心カム部材90及び入力ロータ14へ伝達し、入力ロータ14へ伝達された反力トルクはブレーキペダル80を軸線12の周りに押し戻すトルクとしてブレーキペダル80へ伝達される。
【0069】
またこの第二の実施例に於いては、伝達手段108は入力ロータ14の軸線12の周りの回転運動量が増大するにつれて入力ロータ14の回転運動量に対するばね座部材102及び104の互いに近づく方向の相対直線運動量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する圧縮コイルばね106の圧縮変形量の比を漸次増大させ、これにより入力ロータ14の回転運動量に対する反力トルクの比が漸次増大する。
【0070】
かくして図示の第二の実施例によれば、上述の第一の実施例の場合と同様、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0071】
特に図示の第二の実施例によれば、ブレーキペダル80と共に軸線12の周りに回転する入力ロータ14は伝達手段108を構成しておらず、入力ロータ14には上述の第一の実施例に於けるカム溝74は設けられておらず、軸部材84により軸線12の周りに回転可能に支持されているだけであるので、上述の第一の実施例の場合に比してブレーキペダル80の支持剛性を高くすることができる。
[第三の実施例]
【0072】
図7はマスタシリンダ内蔵型のブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第三の実施例を示す軸線に沿う断面図である。
【0073】
この第三の実施例に於いては、ハウジング18の本体18Aの端壁及び支持軸28には軸線12に沿って延在し一端にて第一のシリンダ室60に連通する連通孔110が設けられており、連通孔110には高圧導管112の一端が接続されている。同様に、ハウジング18のエンドキャップ18B及び支持軸30には軸線12に沿って延在し一端にて第二のシリンダ室62に連通する連通孔114が設けられており、連通孔114にはブレーキ液圧供給導管116の一端が接続されている。ブレーキ液圧供給導管116の他端は車両の各車輪に対応して設けられた周知の増減圧制御弁118を介して制動力発生装置120のホイールシリンダ122に接続されている。
【0074】
高圧導管112の他端はオイルポンプ124の吐出口に接続されており、オイルポンプ124の吸入口は低圧導管126によりオイルを貯留するリザーバ128に接続されている。高圧導管112にはリターン導管130の一端が接続され、リターン導管130の他端はリザーバ128に接続されている。リターン導管130の途中には常開のリニアソレノイド弁132が設けられている。リニアソレノイド弁132は図には示されていない電子制御装置によって制御されることにより、リニアソレノイド弁132に於ける差圧を制御し、これにより高圧導管112内の圧力、従って第一のシリンダ室60内のオイルの圧力を制御する。従ってオイルポンプ124、リニアソレノイド弁132、電子制御装置等は互いに共働して必要に応じて第一のシリンダ室60内のオイルの圧力を制御する圧力制御装置134を構成している。
【0075】
尚圧力制御装置134は運転者のブレーキペダル80の踏み込み操作をアシストする制御の如く任意の要領にて制御されてよい。例えば運転者がブレーキペダル80を踏み込むことによる制動操作量が図7には示されていない踏力センサ若しくはストロークセンサにより検出され、制動操作量に基づき目標制動圧、即ちホイールシリンダ122内の目標圧力が演算され、目標圧力と圧力センサにより検出されるホイールシリンダ122内の実際の圧力との偏差が演算され、該偏差が0になるよう第一のシリンダ室60内の圧力が制御されてよい。
【0076】
また図7に示されている如く、この第三の実施例に於ける出力ピストン16には上述の第一の実施例に於ける連通孔16Cに相当する連通孔及び減摩リング66は設けられておらず、出力ピストン16の第二のシリンダ室62の側の端部には軸線12の周りに環状に延在するカップシール136が装着されている。カップシール136はゴムの如き弾性材よりなり、出力ピストン16がハウジング18に対し相対的に軸線12に沿って直線運動することを許しつつ第二のシリンダ室62を第一のシリンダ室60及びガイド溝72より遮断している。尚第二のシリンダ室62もオイルにて充填されている。またこの第三の実施例の他の点は上述の第一の実施例と同様に構成されている。
【0077】
かくして図示の第三の実施例に於いては、上述の第一の実施例と同様の作用効果を得ることができ、ストロークシミュレータ10は運転者によりブレーキペダル80のぺダル部80Bが踏み込まれる場合に、運転者によるブレーキペダル80の踏み込みストロークを許容すると共に、運転者がブレーキペダル80より感じる制動操作反力をブレーキペダル80の踏み込み量の増大につれて連続的な非線形の特性にて増大させ、これにより最適な制動操作フィーリングを達成することができる。
【0078】
また図示の第三の実施例によれば、ブレーキペダル80が踏み込まれることにより出力ピストン16がエンドキャップ18Bへ向けて駆動されると、第二のシリンダ室62内のオイルがブレーキペダル80に対する踏力に応じて加圧され、踏力に応じた圧力のオイルをホイールシリンダ122へ供給することができるので、出力ピストン16及びハウジング18はマスタシリンダ138としても機能し、従ってストロークシミュレータ10をマスタシリンダ内蔵型のブレーキストロークシミュレータとして機能させることができる。
【0079】
特に図示の第三の実施例によれば、第一のシリンダ室60は連通孔110を介して圧力制御装置134に接続されており、第一のシリンダ室60内の圧力を圧力制御装置134によって制御することができるので、運転者によるブレーキペダル80の踏み込み操作をアシストしたり、運転者によるブレーキペダル80の踏み込み操作に依存せずに制動圧を制御したりすることができる。
【0080】
またホイールシリンダ122を含む制動力発生装置120はホイールシリンダ122内の圧力に応じてブレーキパッドの如き摩擦材をブレーキロータの如き車輪と共に回転する回転部材に押し付けることにより制動力を発生し、その際制動力発生装置120の構成部品がホイールシリンダ122内の圧力に比例して弾性変形し、反力を発生する。従って図7に於いて仮想線にて示されている如く、制動力発生装置120はピストン120Aが線形のばね特性を有する圧縮コイルばね120Bによりシリンダ室120Cの容積を低減する方向へ付勢されたシリンダ−ピストン装置と等価なものと考えることができる。
【0081】
よってこの第三の実施例に於いては、制動力発生装置120も反力発生手段として作用し、出力ピストン16の直線運動がブレーキ液圧供給導管116内のオイルを介して制動力発生装置120のピストン120Aへ伝達され、ピストン120Aが出力部材として機能し圧縮コイルばね120Bを変形させると考えることができる。また圧縮コイルばね120Bの反力がピストン120A、ブレーキ液圧供給導管116及び第二のシリンダ室62内のオイルの圧力を介して出力ピストン16へ伝達されると考えることができる。
【0082】
尚上述の第一乃至第三の実施例によれば、伝達手段82により入力ロータ14の軸線12の周りの回転運動が出力ピストン16の軸線12に沿う直線運動に変換され、圧縮コイルばね68が軸線12に沿って圧縮変形されるので、軸線12を基準にして全ての構成部材を配設することができる。
【0083】
また上述の第一乃至第三の実施例によれば、出力ピストン16が圧縮コイルばね68によって図にて右方へ付勢されることにより、入力ロータ14が初期位置にあるときには、荷重伝達ロッド70等が右端の初期位置に位置決めされるので、非制動時に出力ピストン16ががたつくことを効果的に防止することができる。
【0084】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0085】
例えば上述の第一及び第二の実施例に於いては、本発明による操作シミュレータはブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成されているが、第一及び第二の実施例はブレーキペダル80のアーム部80Cにマスタシリンダ装置のオペレーションロッドが枢着されることにより、液圧式ブレーキ装置に適用されてもよい。
【0086】
また上述の第三の実施例に於いては、第一のシリンダ室60は連通孔110を介して圧力制御装置134に接続され、第一のシリンダ室60内の圧力が圧力制御装置134によって制御されるようになっているが、連通孔110及び圧力制御装置134が省略されてもよい。また逆に上述の第一の実施例は第三の実施例に於ける連通孔110及び圧力制御装置134と同様の連通孔及び圧力制御装置が付加され、オペレータの操作がアシストされるよう修正されてもよい。
【0087】
また上述の第三の実施例に於いては、第二のシリンダ室62内に圧縮コイルばね68が弾装されているが、上述の如く制動力発生装置120が反力発生手段として作用するので、反力発生手段としての圧縮コイルばね68が省略されてもよい。またその場合にはブレーキペダル80を踏み込み方向とは反対の方向へ付勢する復帰ばねがアーム部80Cと車体との間に配設されてもよい。
【0088】
また上述の第一及び第三の実施例に於いては、入力ロータ14はハウジング18外にてハウジング18により回転可能に支持され、出力ピストン16はハウジング18内にてハウジング18により往復動可能に支持されているが、入力ロータ14もハウジング18内に収容され、入力ロータ14及び出力ピストン16がハウジング内にて互いに他に対し相対的に回転可能且つ往復動可能にハウジングにより支持されるよう修正されてもよい。
【0089】
更に上述の各実施例に於いては、操作シミュレータはブレーキストロークシミュレータであり、入力ロータ14は運転者の制動操作によって軸線12の周りに回転駆動されるようになっているが、本発明の操作シミュレータは例えば自動車のアクセルペダルの如くオペレータによる操作手段の操作を許すと共に操作手段を介してオペレータに所要の操作反力を与える操作シミュレータに適用されてよく、操作手段としてのブレーキペダル80は軸線12の周りに枢動される枢動操作手段であるが、操作手段は軸線12の周りに回転される回転操作手段であってもよい。
【図面の簡単な説明】
【0090】
【図1】ブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第一の実施例を示す軸線に沿う断面図である。
【図2】第一の実施例の出力ロータを平面に展開して示す展開図である。
【図3】車両に搭載された状態にて第一の実施例の操作シミュレータを示す解図的側面図である。
【図4】入力ロータの回転運動量と出力ピストンの直線運動量との間の関係を示すグラフである。
【図5】ブレーキペダルの踏み込み量とペダル反力との間の関係を示すグラフである。
【図6】ブレーキバイワイヤ式のブレーキ装置に使用されるブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第二の実施例を示す軸線に沿う断面図である。
【図7】マスタシリンダ内蔵型のブレーキストロークシミュレータとして構成された本発明による操作シミュレータの第三の実施例を示す軸線に沿う断面図である。
【符号の説明】
【0091】
10…ブレーキストロークシミュレータ、14…入力ロータ、16…出力ピストン、18…ハウジング、28、30…支持軸、32、34…取り付けブラケット、60…第一のシリンダ室、62…第二のシリンダ室、68…圧縮コイルばね、70…荷重伝達ロッド、72…ガイド溝、74…カム溝、76…ガイドローラ、78…カムローラ、80…ブレーキペダル、82…伝達手段、84…軸部材、90…偏心カム部材、100…ばね支持ロッド、106…圧縮コイルばね、120…制動力発生装置、124…オイルポンプ、132…リニアソレノイド弁、134…圧力制御装置、138…マスタシリンダ
【特許請求の範囲】
【請求項1】
軸線の周りに回転運動する入力部材と、オペレータによって操作されることにより軸線の周りに回転し前記入力部材に回転運動を付与する操作手段と、変形量に応じて反力を発生する反力発生手段を直線運動することにより変形させる出力部材と、前記入力部材と前記出力部材との間に設けられ前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達すると共に、前記反力発生手段の反力を前記出力部材を介して前記入力部材に伝達する伝達手段とを有し、オペレータによる前記操作手段の操作を許容すると共に、前記操作手段を介してオペレータに操作反力を付与する回転運動入力型操作シミュレータにして、前記反力発生手段は変形量に応じて線形的に反力を発生し、前記伝達手段は前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成されていることを特徴とする回転運動入力型操作シミュレータ。
【請求項2】
前記伝達手段は前記入力部材に設けられたカムと、前記出力部材に設けられ前記カムに係合するカムフォロアとを有し、前記カムフォロアが前記カムに従動することにより前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させることを特徴とする請求項1に記載の回転運動入力型操作シミュレータ。
【請求項3】
前記入力部材及び前記出力部材は前記軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合していることを特徴とする請求項1又は2に記載の回転運動入力型操作シミュレータ。
【請求項4】
前記伝達手段は前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達し、前記出力部材が前記反力発生手段より受けた反力を前記入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換して前記入力部材に伝達することを特徴とする請求項1乃至3の何れかに記載の回転運動入力型操作シミュレータ。
【請求項5】
前記カム及び前記カムフォロアの一方はカム溝であり、前記カム及び前記カムフォロアの他方は前記カム溝に係合し前記カム溝に沿って移動するカム溝係合部材であり、前記カム溝は前記軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲していることを特徴とする請求項2乃至4の何れかに記載の回転運動入力型操作シミュレータ。
【請求項6】
前記反力発生手段は前記軸線に沿う方向の変形を受けることにより変形量に応じて線形的に前記軸線に沿う方向の反力を発生することを特徴とする請求項3乃至5の何れかに記載の回転運動入力型操作シミュレータ。
【請求項7】
前記入力部材はハウジングにより直線運動可能に支持され、前記ハウジングと共働して両側に二つのシリンダ室を郭定しており、前記入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されていることを特徴とする請求項1乃至6の何れかに記載の回転運動入力型操作シミュレータ。
【請求項8】
前記入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室は該シリンダ室内の圧力を制御する手段に連通接続されていることを特徴とする請求項7に記載の回転運動入力型操作シミュレータ。
【請求項9】
前記伝達手段は前記入力部材の回転運動を前記軸線を横切る方向の直線運動に変換して前記出力部材に伝達することを特徴とする請求項1乃至4の何れかに記載の回転運動入力型操作シミュレータ。
【請求項10】
前記カム溝係合部材は前記出力部材に固定され径方向に延在する軸部材と、前記軸部材に回転可能に支持され前記カム溝の壁面に転動可能に係合するカムローラとを有することを特徴とする請求項5乃至8の何れかに記載の回転運動入力型操作シミュレータ。
【請求項11】
前記カム溝係合部材は前記軸部材に回転可能に支持され前記出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有することを特徴とする請求項10に記載の回転運動入力型操作シミュレータ。
【請求項1】
軸線の周りに回転運動する入力部材と、オペレータによって操作されることにより軸線の周りに回転し前記入力部材に回転運動を付与する操作手段と、変形量に応じて反力を発生する反力発生手段を直線運動することにより変形させる出力部材と、前記入力部材と前記出力部材との間に設けられ前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達すると共に、前記反力発生手段の反力を前記出力部材を介して前記入力部材に伝達する伝達手段とを有し、オペレータによる前記操作手段の操作を許容すると共に、前記操作手段を介してオペレータに操作反力を付与する回転運動入力型操作シミュレータにして、前記反力発生手段は変形量に応じて線形的に反力を発生し、前記伝達手段は前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させるよう構成されていることを特徴とする回転運動入力型操作シミュレータ。
【請求項2】
前記伝達手段は前記入力部材に設けられたカムと、前記出力部材に設けられ前記カムに係合するカムフォロアとを有し、前記カムフォロアが前記カムに従動することにより前記入力部材の回転運動量に対する前記出力部材の直線運動量の比を前記入力部材の回転運動量に応じて連続的に非線形に変化させることを特徴とする請求項1に記載の回転運動入力型操作シミュレータ。
【請求項3】
前記入力部材及び前記出力部材は前記軸線に対し同軸にて互いに他に対し相対運動可能に互いに嵌合していることを特徴とする請求項1又は2に記載の回転運動入力型操作シミュレータ。
【請求項4】
前記伝達手段は前記入力部材の回転運動を直線運動に変換して前記出力部材に伝達し、前記出力部材が前記反力発生手段より受けた反力を前記入力部材の回転運動量の増大方向とは逆方向の反力トルクに変換して前記入力部材に伝達することを特徴とする請求項1乃至3の何れかに記載の回転運動入力型操作シミュレータ。
【請求項5】
前記カム及び前記カムフォロアの一方はカム溝であり、前記カム及び前記カムフォロアの他方は前記カム溝に係合し前記カム溝に沿って移動するカム溝係合部材であり、前記カム溝は前記軸線の周りに周方向に対し傾斜して延在し且つ周方向に対する傾斜角が連続的に漸次変化するよう湾曲していることを特徴とする請求項2乃至4の何れかに記載の回転運動入力型操作シミュレータ。
【請求項6】
前記反力発生手段は前記軸線に沿う方向の変形を受けることにより変形量に応じて線形的に前記軸線に沿う方向の反力を発生することを特徴とする請求項3乃至5の何れかに記載の回転運動入力型操作シミュレータ。
【請求項7】
前記入力部材はハウジングにより直線運動可能に支持され、前記ハウジングと共働して両側に二つのシリンダ室を郭定しており、前記入力部材の回転運動量の増大に伴い容積が減少する側のシリンダ室は作動流体にて充填され且つ作動流体の圧力にて作動する装置に連通接続されていることを特徴とする請求項1乃至6の何れかに記載の回転運動入力型操作シミュレータ。
【請求項8】
前記入力部材の回転運動量の増大に伴い容積が増大する側のシリンダ室は該シリンダ室内の圧力を制御する手段に連通接続されていることを特徴とする請求項7に記載の回転運動入力型操作シミュレータ。
【請求項9】
前記伝達手段は前記入力部材の回転運動を前記軸線を横切る方向の直線運動に変換して前記出力部材に伝達することを特徴とする請求項1乃至4の何れかに記載の回転運動入力型操作シミュレータ。
【請求項10】
前記カム溝係合部材は前記出力部材に固定され径方向に延在する軸部材と、前記軸部材に回転可能に支持され前記カム溝の壁面に転動可能に係合するカムローラとを有することを特徴とする請求項5乃至8の何れかに記載の回転運動入力型操作シミュレータ。
【請求項11】
前記カム溝係合部材は前記軸部材に回転可能に支持され前記出力部材の直線運動の方向に沿って延在するガイド溝の壁面に転動可能に係合するガイドローラを有することを特徴とする請求項10に記載の回転運動入力型操作シミュレータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−143334(P2008−143334A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2006−332317(P2006−332317)
【出願日】平成18年12月8日(2006.12.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成18年12月8日(2006.12.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]