
回転運動変換装置
【課題】負荷に応じて減速比が変化する回転運動変換装置を提供する。
【解決手段】回転運動変換装置を用いた把持装置100は、ネジ山を有する主軸130と、主軸130を支持する軸受であって、主軸130と接する面にネジ山の直径より大きい直径のネジ溝が形成された内輪と、内輪を回転可能に支持する外輪と、を有する軸受150と、を備えている。そして、軸受150は、主軸130の軸方向に対して所定の傾斜角度で傾斜しており、主軸130を回転させたときに主軸130の軸方向に直動する。
【解決手段】回転運動変換装置を用いた把持装置100は、ネジ山を有する主軸130と、主軸130を支持する軸受であって、主軸130と接する面にネジ山の直径より大きい直径のネジ溝が形成された内輪と、内輪を回転可能に支持する外輪と、を有する軸受150と、を備えている。そして、軸受150は、主軸130の軸方向に対して所定の傾斜角度で傾斜しており、主軸130を回転させたときに主軸130の軸方向に直動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は回転運動変換装置に関する。
【背景技術】
【0002】
多くの機械は、モータ等の回転運動を直線運動に変換する回転運動変換装置を備えている。一般に、モータは高速回転しているため、モータの回転運動を効果的に直線運動に変換するためには、適切な減速比の減速機を使用する必要がある。特許文献1には、減速比が一定の減速機を使用したロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−178939号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のロボットハンドで物を把持する場合、必要とする力が大きいほど大きな減速比の減速機を使用する必要がある。しかしながら、減速比において、力と速度はトレードオフの関係にあるため、減速比を大きくして高負荷に対応しようとすると、指に負荷がかかっていない状態(例えば、把持対象まで指を動かしている状態)までも指の動きが遅くなるという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、負荷に応じて減速比が変化する回転運動変換装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の回転運動変換装置は、
ネジ山を有する主軸と、
該主軸を支持する軸受であって、前記主軸と接する面に前記ネジ山の直径より大きい直径のネジ溝が形成された内輪と、該内輪を回転可能に支持する外輪と、を有する軸受と、を備え、
前記軸受は、前記主軸の軸方向に対して所定の傾斜角度で傾斜しており、前記主軸を回転させたときに前記主軸の軸方向に直動する、
ことを特徴とする。
【0007】
傾斜角度を変化可能に、前記軸受を傾斜させる軸受傾斜機構、を備えていてもよい。
【0008】
前記主軸と交差する交差方向を軸に前記軸受を回転可能に支持する軸受支持体、を備え、
前記軸受傾斜機構は、前記軸受と前記軸受支持体との間に配置される弾性体、を有し、
前記軸受は、前記軸受支持体または前記主軸に加わる軸方向の力によって、前記弾性体の弾性力に抗して前記交差方向を軸に回転してもよい。
【0009】
前記弾性体はバネであってもよい。
【発明の効果】
【0010】
本発明によれば、負荷に応じて減速比が変化する回転運動変換装置を提供できる。
【図面の簡単な説明】
【0011】
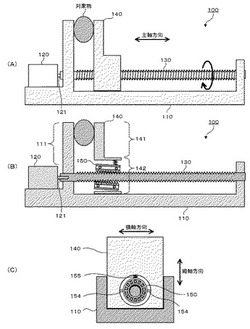
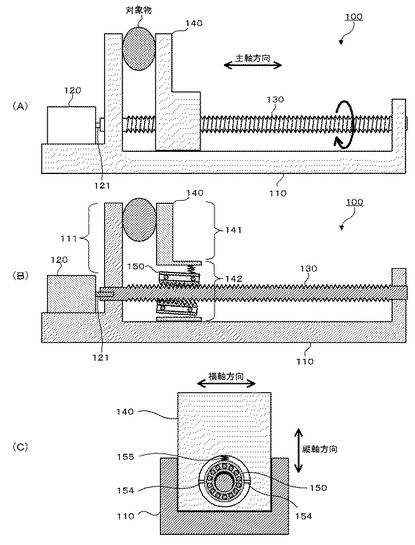
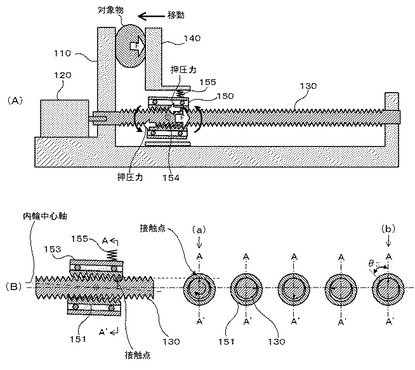
【図1】本発明の実施形態に係る把持装置の構成を説明するための図であり、(A)は把持装置の側面図、(B)は把持装置の断面図、(C)は把持装置が備える移動体を主軸方向から見た図である。
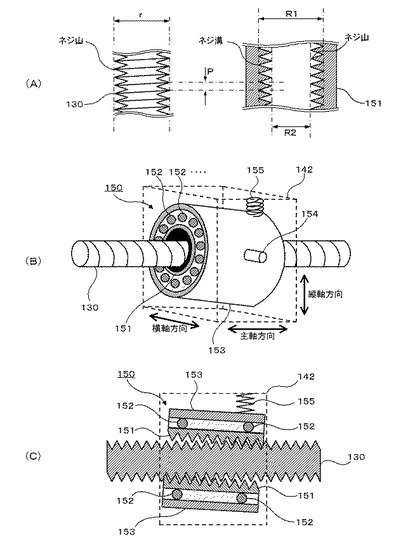
【図2】図1に示す把持装置が備える軸受の構成を説明するための図であり、(A)は内輪のネジ溝と主軸のネジ山との関係を説明するための図、(B)は軸受の斜視図、(C)は軸受の断面図である。
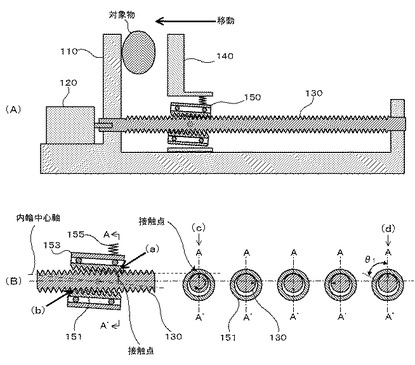
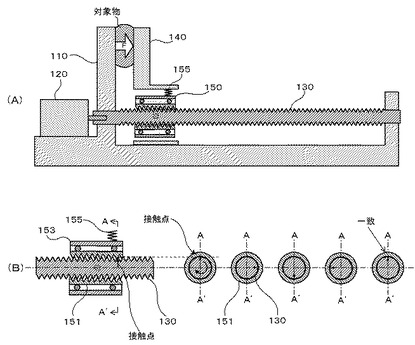
【図3】移動体に負荷がかかっていない状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
【図4】移動体に負荷がかかった状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
【図5】移動体に大きな負荷がかかった状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
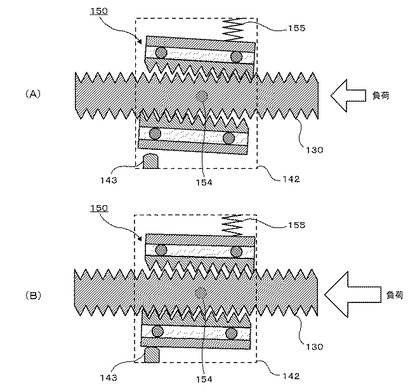
【図6】軸受が一定量以上回転しないように筐体部にストッパを設けた様子を示す図であり、(A)は主軸に小さな負荷がかかったときの軸受の断面図であり、(B)は主軸に大きな負荷がかかったときの軸受の断面図である。
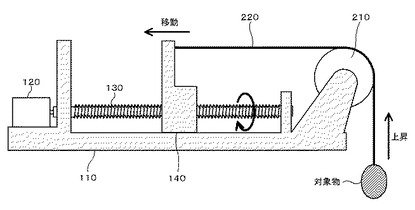
【図7】回転運動変換装置を用いたクレーン装置を説明するための図である。
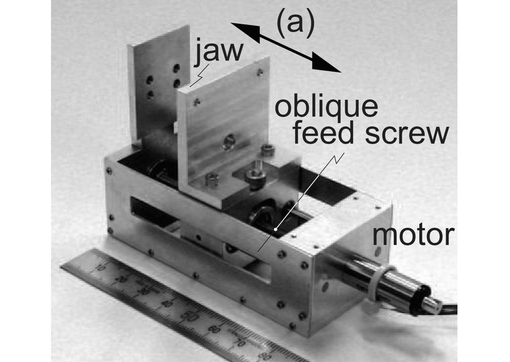
【図8】実施例で使用した斜旋回送りネジを示す図である。
【図9】斜旋回送りネジを実装したロボットグリッパを示す図である。
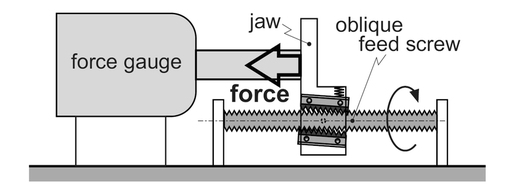
【図10】適切なストッパ位置を検証するための実験環境を示す図である。
【図11】適切なストッパ位置の検証結果を示す図である。
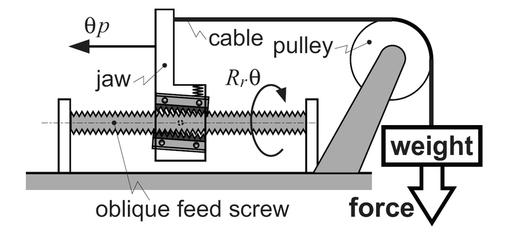
【図12】負荷と減速比の関係を検証するための実験環境を示す図である。
【図13】負荷と減速比の関係を示す図である。
【図14】モータに印加する電流と出力との関係を示す図である。
【発明を実施するための形態】
【0012】
本発明の実施形態にかかる回転運動変換装置を用いた把持装置について、図面を参照しながら説明する。
把持装置100は、強い力で把持対象を把持するための装置であり、図1(A)(B)に示すように、基体110と、モータ120と、主軸130と、移動体140と、軸受150と、から構成される。
【0013】
基体110は、鉄等の重く頑丈な素材から構成され、モータ120、主軸130等の各種部品が設置されている。また、基体110は、主軸130の軸方向(以下、「主軸方向」という。)に平面を向けた平板状の把持部111を有している。把持部111は、後述の移動体140と共に把持対象を把持する。
【0014】
モータ120は、回転軸121を有する電気モータから構成される。回転軸121は、図1(B)に示すように、主軸130の一端に固定されている。
【0015】
主軸130は、金属製の棒状体から構成され、その表面には螺旋状のネジ山が形成されている。主軸130の両端は基体110に回転可能に固定されており、主軸130は、モータ120によって自在に回転するようになっている。なお、主軸130のネジ山のピッチは、図2(A)に示すように、内輪151のネジ溝のピッチPと同じピッチとなっている。また、主軸130のネジ山の直径rは、内輪151のネジ溝の直径R1より小さく、内輪151のネジ山の直径R2より大きくなっている。
【0016】
移動体140は、鉄等の頑丈な素材から構成され、図1(B)に示すように、平板状の把持部141と、円柱状の穴が開いた筐体部142と、から構成される。なお、筐体部142の底面および両側面は、図1(C)に示すように、油膜を介して基体110に接触している。そのため、移動体140は、把持部141に大きな負荷が加わったとしても、直立姿勢を維持したまま前進できるようになっている。
【0017】
軸受150は、主軸130を支持する玉軸受であり、内輪151と、球体152と、外輪153と、横軸154と、弾性体155と、から構成される。軸受150は、図1(B)(C)に示すように、筐体部142の円柱状の穴の内部に設置されている。
【0018】
内輪151は、円筒体から構成され、その内周面には、図2(A)に示すように、主軸130のネジ山の直径より若干大きい直径のネジ溝が形成されている。内輪151は、ネジ山とネジ溝との摩擦によって、主軸130と共に回転するようになっている。なお、内輪151は、図1(B)に示すように、主軸方向から若干傾いた状態で設置されている。内輪151のネジ溝の中心軸は、移動体140に対象物から力が加わっていない状態で、例えば、主軸方向に対して1°〜30°程度の傾斜角度で傾いている。
【0019】
球体152は、内輪151と外輪153との間に配置される金属製の玉であり、内輪151が回転することに伴う、内輪151と外輪153との間で発生する摩擦を低減させている。
【0020】
外輪153は、内輪151より一回り大きい円筒体から構成され、球体152を介して内輪151を回転可能に支持している。外輪153は、図1(C)に示すように、横軸154を介して、移動体140に固定されている。
【0021】
横軸154は、軸受150を支持する2本の軸から構成され、主軸130と直交する方向(以下、「横軸方向」という。)にそれぞれ設置されている。軸受150は、横軸154を中心に回転することによって、主軸130に対する傾斜角度を変更できるようになっている。
【0022】
弾性体155は、一定のばね定数を有するバネから構成され、図2(B)に示すように、主軸方向および横軸方向の双方と直交する方向(以下、「縦軸方向」という。)に設置されている。また、弾性体155は、図2(C)に示すように、横軸154から主軸方向に若干偏った位置に設置されており、その弾性力によって軸受150を傾斜させている。
【0023】
次に、このような構成を有する把持装置100の動作について説明する。
【0024】
軸受150は、図3(A)に示すように、若干傾いた状態で主軸130と接している。そのため、主軸130のネジ山と内輪151のネジ溝とは、図3(B)に示す(a)と(b)の部分において、深く噛み合っている。この状態は、言い換えると、小さな直径の主軸130と、大きな内径の内輪151とが、図3(B)に示す(c)のように、偏心して接している状態ということができる。
【0025】
主軸130を回転させると、内輪151は主軸130とともに回転するが、上述したように、内輪151の内径は主軸130の直径より大きいため、主軸130が一回転したからといって、内輪151は一回転しない。内輪151は、図3(B)に示す(d)のように、主軸130が一回転したときに、360°−θ1だけ回転する。これは、内輪151を回転しないように固定して、主軸130をθ1だけ回転させたのと同じことであるので、軸受150は、この回転角度の差θ1分だけ、主軸方向へ移動する。
【0026】
主軸130を高速回転させると、移動体140は、主軸方向に直動していき、最終的に、把持対象と接触する。そうすると、移動体140には、図4(A)に示すように、把持対象からの反作用力としての負荷Fが働く。移動体140に加わった負荷Fは、横軸154を介して軸受150に伝わり、最終的に、図4(A)に示すように、主軸130からの押圧力となって現れる。
【0027】
この押圧力によって、軸受150は、弾性体155の弾性力に抗して、横軸154を中心に回転する。そうすると、軸受150の傾斜角度は、図4(B)に示すように、当初の傾斜角度より幾分緩やかになる。そうなると、ネジ山とネジ溝は、比較的浅く噛み合うことになり、その結果、主軸130と内輪151のそれぞれの中心軸から接触点までの距離の差は、図4(B)に示すように、小さくなる。
【0028】
接触点までの距離の差が小さくなると、図4(B)に示す(a)のように、主軸130と内輪151との直径の差は縮まったと見ることができるので、図4(B)に示す(b)のように、回転角度の差θ2は、当初の回転角度の差θ1より小さくなる。その結果、移動体140の移動速度は、当初の移動速度より遅くなる。移動速度と把持力はトレードオフの関係にあるから、移動速度が低下していくとともに、移動体140は、大きな力を発揮する(即ち、モータ120の1回転に対する移動体140の移動距離が短いほど、モータ120のトルクが大きな把持力に変換される)。
【0029】
移動体140をさらに移動させると、図5(A)に示すように、把持対象から受ける負荷は、さらに大きくなる。そうすると、ネジ山とネジ溝に働く押圧力も大きくなって、最終的に、軸受150の傾斜は、図5(B)に示すように、消滅する。そうなると、ネジ山とネジ溝は、360°完全に噛み合った状態になり、図5(B)に示すように、主軸130と内輪151の中心軸から接触点までの距離は完全に一致する。その結果、主軸130と内輪151は、完全に同期して回転することになり、移動体140は、主軸方向に全く移動しなくなる。その結果、把持対象に対する把持力の印加は停止される。
【0030】
本実施形態によれば、移動体140にかかる負荷に応じて、減速比を変化させることができる。すなわち、移動体140に負荷がかかっていないときは、移動体140の把持力を弱くするかわりに、移動体140を早く移動させることができる。また、移動体に大きな負荷がかかっているときは、移動体の移動速度を遅くするかわりに、移動体140の把持力を大きくすることができる。そのため、物を把持していない状態では、把持対象まで素早く移動体140を移動させることができ、物を把持し始めたら、強い力で把持対象を把持することができる
【0031】
また、把持装置100は、減速比を変更するために、油圧装置、磁石等の専用のアクチュエータを使用していないので、装置を容易に小型化することができる。
【0032】
また、把持力がある一定以上になると、軸受150の傾斜角度が0°となって、移動体140の移動が停止されるので、モータ120への過負荷を抑制することができる。
【0033】
なお、筐体部142の内部には、軸受150が傾斜角度を保持し続けるためのストッパ143が設置されていてもよい。例えば、ストッパ143は、図6(A)に示すように、横軸154を中心に弾性体155と対向する位置に、筐体部142の内壁から突出するように設置されていてもよい。移動体140に負荷が加わっても、図6(B)に示すように、軸受150の傾斜角度が0°とならないので、強い把持力を出力し続けることができる。
【0034】
また、弾性体155は、バネに限らず、例えば、ゴム等の大きな弾性を示す素材から構成される物体であってもよい。
【0035】
また、本実施形態では、対象物から移動体140に加わる負荷を使って軸受150の傾斜角度を変化させているが、例えば、主軸130を主軸方向に僅かに移動できるように構成して、図6(A)(B)に示すように、主軸130に対し、主軸方向に負荷を加えることによって軸受150の傾斜角度を変化させてもよい。
【0036】
また、軸受150の傾斜角度は1〜30°に限られない。軸受150は、主軸方向に対し、0°より大きく90°より小さいあらゆる角度に傾斜可能である。
【0037】
また、本実施形態では、主軸130と直交する方向(横軸方向)に横軸154を設置したが、軸受150が傾斜可能なのであれば、主軸130と交差するあらゆる方向に設置可能である。なお、弾性体155の設置位置も、縦軸方向に限られず、主軸130および横軸154と交差するあらゆる方向に設置可能である。
【0038】
また、本実施形態では、回転運動変換装置を把持装置に用いたが、例えば、図7に示すように、基体110の一端に滑車210を設け、さらに、滑車210を通したワイヤー220の一端を、移動体140に固定することによって、対象物を持ち上げるクレーン装置として構成してもよい。対象物の重さに応じて、対象物の上昇速度を変化させることができる。
【実施例】
【0039】
本発明の回転運動変換装置(以下、「斜旋回送りネジ」という)によって回転運動を直線運動に変換できることを検証した。
【0040】
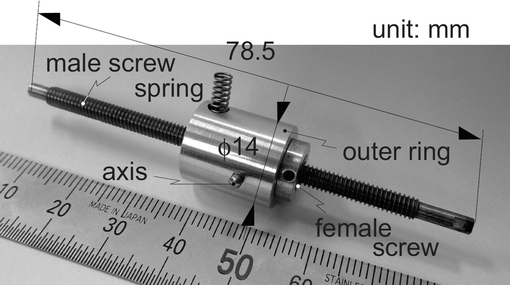
製作した斜旋回送りネジを図8に示す。全質量は13.8gである。雌ネジはM4並目を用いており、ピッチは0.7mmである。雄ネジもM4並目を用いているが、ダイスを調節して成形することで少し細くなっており、山の先端にて計測した直径は3.6mmである。また、外輪の直径は14mmと小型である。ばねのばね定数は1.8N/mである。この斜旋回送りネジを実装したロボットグリッパを図9に示す。全質量は184gである。挟み口が(a)の方向に動くことにより把持を行うことができる。モータにはブラシレスモータを用いた。モータのトルク定数は2.7mNm/Aで質量は13gである。
【0041】
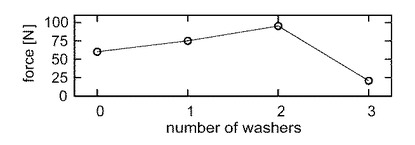
ストッパの位置よって、どのように出力される力が変化するかを検証した。ストッパの位置は厚さ0.05mmの座金を挟むことにより調節した。座金の枚数を増やすと図6で示したストッパの長さが短くなる。モータに1.5Aの一定の電流を流し、座金の枚数を変化させたときに出力される力を図10のように力センサを用い計測した。実験結果を図11に示す。この実験結果から、座金の枚数が2枚のときのストッパの位置が最も適切であることが分かる。
【0042】
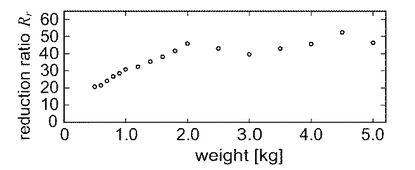
次に、提案する機構が負荷に応じて減速比が変化することを検証した。図12のように出力に紐を取り付け、錘によって負荷を加えた。減速比を求めるために、モータの回転数と出力の速度を計測した。モータの回転数はホールセンサを用いて計測し、出力の速度は図12のように紐をプーリに経由させ、プーリの回転をエンコーダで計測することにより求めた。実験結果を図13に示す。ストッパに接触する2.0kgまでは減速比Rrが20から45まで増加し、その後はほぼ一定になっていることが分かる。なお、減速比Rrは、雄ネジを半径rの円筒、雌ネジを半径Rの円筒として考えたとき、下記式(1)により求まる値である。
【0043】
Rr=R/(R−r) ・・・(式1)
【0044】
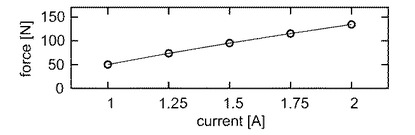
次に、モータに流す電流に応じて、出力される力が変化することを検証した。モータに電流を1.0Aから2.0Aまで0.25Aおきに流したときの力を図14に示す。電流に応じて力が変化しており、2.0Aのとき134Nとなることが分かる。
【産業上の利用可能性】
【0045】
産業用ロボットをはじめ、回転運動を直線運動に変換する機構を備えた多くの装置で利用可能である。
【符号の説明】
【0046】
100 把持装置
110 基体
111 把持部
120 モータ
121 回転軸
130 主軸
140 移動体
141 把持部
142 筐体部
143 ストッパ
150 軸受
151 内輪
152 球体
153 外輪
154 横軸
155 弾性体
210 滑車
220 ワイヤー
【技術分野】
【0001】
本発明は回転運動変換装置に関する。
【背景技術】
【0002】
多くの機械は、モータ等の回転運動を直線運動に変換する回転運動変換装置を備えている。一般に、モータは高速回転しているため、モータの回転運動を効果的に直線運動に変換するためには、適切な減速比の減速機を使用する必要がある。特許文献1には、減速比が一定の減速機を使用したロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−178939号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のロボットハンドで物を把持する場合、必要とする力が大きいほど大きな減速比の減速機を使用する必要がある。しかしながら、減速比において、力と速度はトレードオフの関係にあるため、減速比を大きくして高負荷に対応しようとすると、指に負荷がかかっていない状態(例えば、把持対象まで指を動かしている状態)までも指の動きが遅くなるという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、負荷に応じて減速比が変化する回転運動変換装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の回転運動変換装置は、
ネジ山を有する主軸と、
該主軸を支持する軸受であって、前記主軸と接する面に前記ネジ山の直径より大きい直径のネジ溝が形成された内輪と、該内輪を回転可能に支持する外輪と、を有する軸受と、を備え、
前記軸受は、前記主軸の軸方向に対して所定の傾斜角度で傾斜しており、前記主軸を回転させたときに前記主軸の軸方向に直動する、
ことを特徴とする。
【0007】
傾斜角度を変化可能に、前記軸受を傾斜させる軸受傾斜機構、を備えていてもよい。
【0008】
前記主軸と交差する交差方向を軸に前記軸受を回転可能に支持する軸受支持体、を備え、
前記軸受傾斜機構は、前記軸受と前記軸受支持体との間に配置される弾性体、を有し、
前記軸受は、前記軸受支持体または前記主軸に加わる軸方向の力によって、前記弾性体の弾性力に抗して前記交差方向を軸に回転してもよい。
【0009】
前記弾性体はバネであってもよい。
【発明の効果】
【0010】
本発明によれば、負荷に応じて減速比が変化する回転運動変換装置を提供できる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係る把持装置の構成を説明するための図であり、(A)は把持装置の側面図、(B)は把持装置の断面図、(C)は把持装置が備える移動体を主軸方向から見た図である。
【図2】図1に示す把持装置が備える軸受の構成を説明するための図であり、(A)は内輪のネジ溝と主軸のネジ山との関係を説明するための図、(B)は軸受の斜視図、(C)は軸受の断面図である。
【図3】移動体に負荷がかかっていない状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
【図4】移動体に負荷がかかった状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
【図5】移動体に大きな負荷がかかった状態の把持装置の動作を説明するための図であり、(A)は把持装置の断面図、(B)は軸受の断面図である。
【図6】軸受が一定量以上回転しないように筐体部にストッパを設けた様子を示す図であり、(A)は主軸に小さな負荷がかかったときの軸受の断面図であり、(B)は主軸に大きな負荷がかかったときの軸受の断面図である。
【図7】回転運動変換装置を用いたクレーン装置を説明するための図である。
【図8】実施例で使用した斜旋回送りネジを示す図である。
【図9】斜旋回送りネジを実装したロボットグリッパを示す図である。
【図10】適切なストッパ位置を検証するための実験環境を示す図である。
【図11】適切なストッパ位置の検証結果を示す図である。
【図12】負荷と減速比の関係を検証するための実験環境を示す図である。
【図13】負荷と減速比の関係を示す図である。
【図14】モータに印加する電流と出力との関係を示す図である。
【発明を実施するための形態】
【0012】
本発明の実施形態にかかる回転運動変換装置を用いた把持装置について、図面を参照しながら説明する。
把持装置100は、強い力で把持対象を把持するための装置であり、図1(A)(B)に示すように、基体110と、モータ120と、主軸130と、移動体140と、軸受150と、から構成される。
【0013】
基体110は、鉄等の重く頑丈な素材から構成され、モータ120、主軸130等の各種部品が設置されている。また、基体110は、主軸130の軸方向(以下、「主軸方向」という。)に平面を向けた平板状の把持部111を有している。把持部111は、後述の移動体140と共に把持対象を把持する。
【0014】
モータ120は、回転軸121を有する電気モータから構成される。回転軸121は、図1(B)に示すように、主軸130の一端に固定されている。
【0015】
主軸130は、金属製の棒状体から構成され、その表面には螺旋状のネジ山が形成されている。主軸130の両端は基体110に回転可能に固定されており、主軸130は、モータ120によって自在に回転するようになっている。なお、主軸130のネジ山のピッチは、図2(A)に示すように、内輪151のネジ溝のピッチPと同じピッチとなっている。また、主軸130のネジ山の直径rは、内輪151のネジ溝の直径R1より小さく、内輪151のネジ山の直径R2より大きくなっている。
【0016】
移動体140は、鉄等の頑丈な素材から構成され、図1(B)に示すように、平板状の把持部141と、円柱状の穴が開いた筐体部142と、から構成される。なお、筐体部142の底面および両側面は、図1(C)に示すように、油膜を介して基体110に接触している。そのため、移動体140は、把持部141に大きな負荷が加わったとしても、直立姿勢を維持したまま前進できるようになっている。
【0017】
軸受150は、主軸130を支持する玉軸受であり、内輪151と、球体152と、外輪153と、横軸154と、弾性体155と、から構成される。軸受150は、図1(B)(C)に示すように、筐体部142の円柱状の穴の内部に設置されている。
【0018】
内輪151は、円筒体から構成され、その内周面には、図2(A)に示すように、主軸130のネジ山の直径より若干大きい直径のネジ溝が形成されている。内輪151は、ネジ山とネジ溝との摩擦によって、主軸130と共に回転するようになっている。なお、内輪151は、図1(B)に示すように、主軸方向から若干傾いた状態で設置されている。内輪151のネジ溝の中心軸は、移動体140に対象物から力が加わっていない状態で、例えば、主軸方向に対して1°〜30°程度の傾斜角度で傾いている。
【0019】
球体152は、内輪151と外輪153との間に配置される金属製の玉であり、内輪151が回転することに伴う、内輪151と外輪153との間で発生する摩擦を低減させている。
【0020】
外輪153は、内輪151より一回り大きい円筒体から構成され、球体152を介して内輪151を回転可能に支持している。外輪153は、図1(C)に示すように、横軸154を介して、移動体140に固定されている。
【0021】
横軸154は、軸受150を支持する2本の軸から構成され、主軸130と直交する方向(以下、「横軸方向」という。)にそれぞれ設置されている。軸受150は、横軸154を中心に回転することによって、主軸130に対する傾斜角度を変更できるようになっている。
【0022】
弾性体155は、一定のばね定数を有するバネから構成され、図2(B)に示すように、主軸方向および横軸方向の双方と直交する方向(以下、「縦軸方向」という。)に設置されている。また、弾性体155は、図2(C)に示すように、横軸154から主軸方向に若干偏った位置に設置されており、その弾性力によって軸受150を傾斜させている。
【0023】
次に、このような構成を有する把持装置100の動作について説明する。
【0024】
軸受150は、図3(A)に示すように、若干傾いた状態で主軸130と接している。そのため、主軸130のネジ山と内輪151のネジ溝とは、図3(B)に示す(a)と(b)の部分において、深く噛み合っている。この状態は、言い換えると、小さな直径の主軸130と、大きな内径の内輪151とが、図3(B)に示す(c)のように、偏心して接している状態ということができる。
【0025】
主軸130を回転させると、内輪151は主軸130とともに回転するが、上述したように、内輪151の内径は主軸130の直径より大きいため、主軸130が一回転したからといって、内輪151は一回転しない。内輪151は、図3(B)に示す(d)のように、主軸130が一回転したときに、360°−θ1だけ回転する。これは、内輪151を回転しないように固定して、主軸130をθ1だけ回転させたのと同じことであるので、軸受150は、この回転角度の差θ1分だけ、主軸方向へ移動する。
【0026】
主軸130を高速回転させると、移動体140は、主軸方向に直動していき、最終的に、把持対象と接触する。そうすると、移動体140には、図4(A)に示すように、把持対象からの反作用力としての負荷Fが働く。移動体140に加わった負荷Fは、横軸154を介して軸受150に伝わり、最終的に、図4(A)に示すように、主軸130からの押圧力となって現れる。
【0027】
この押圧力によって、軸受150は、弾性体155の弾性力に抗して、横軸154を中心に回転する。そうすると、軸受150の傾斜角度は、図4(B)に示すように、当初の傾斜角度より幾分緩やかになる。そうなると、ネジ山とネジ溝は、比較的浅く噛み合うことになり、その結果、主軸130と内輪151のそれぞれの中心軸から接触点までの距離の差は、図4(B)に示すように、小さくなる。
【0028】
接触点までの距離の差が小さくなると、図4(B)に示す(a)のように、主軸130と内輪151との直径の差は縮まったと見ることができるので、図4(B)に示す(b)のように、回転角度の差θ2は、当初の回転角度の差θ1より小さくなる。その結果、移動体140の移動速度は、当初の移動速度より遅くなる。移動速度と把持力はトレードオフの関係にあるから、移動速度が低下していくとともに、移動体140は、大きな力を発揮する(即ち、モータ120の1回転に対する移動体140の移動距離が短いほど、モータ120のトルクが大きな把持力に変換される)。
【0029】
移動体140をさらに移動させると、図5(A)に示すように、把持対象から受ける負荷は、さらに大きくなる。そうすると、ネジ山とネジ溝に働く押圧力も大きくなって、最終的に、軸受150の傾斜は、図5(B)に示すように、消滅する。そうなると、ネジ山とネジ溝は、360°完全に噛み合った状態になり、図5(B)に示すように、主軸130と内輪151の中心軸から接触点までの距離は完全に一致する。その結果、主軸130と内輪151は、完全に同期して回転することになり、移動体140は、主軸方向に全く移動しなくなる。その結果、把持対象に対する把持力の印加は停止される。
【0030】
本実施形態によれば、移動体140にかかる負荷に応じて、減速比を変化させることができる。すなわち、移動体140に負荷がかかっていないときは、移動体140の把持力を弱くするかわりに、移動体140を早く移動させることができる。また、移動体に大きな負荷がかかっているときは、移動体の移動速度を遅くするかわりに、移動体140の把持力を大きくすることができる。そのため、物を把持していない状態では、把持対象まで素早く移動体140を移動させることができ、物を把持し始めたら、強い力で把持対象を把持することができる
【0031】
また、把持装置100は、減速比を変更するために、油圧装置、磁石等の専用のアクチュエータを使用していないので、装置を容易に小型化することができる。
【0032】
また、把持力がある一定以上になると、軸受150の傾斜角度が0°となって、移動体140の移動が停止されるので、モータ120への過負荷を抑制することができる。
【0033】
なお、筐体部142の内部には、軸受150が傾斜角度を保持し続けるためのストッパ143が設置されていてもよい。例えば、ストッパ143は、図6(A)に示すように、横軸154を中心に弾性体155と対向する位置に、筐体部142の内壁から突出するように設置されていてもよい。移動体140に負荷が加わっても、図6(B)に示すように、軸受150の傾斜角度が0°とならないので、強い把持力を出力し続けることができる。
【0034】
また、弾性体155は、バネに限らず、例えば、ゴム等の大きな弾性を示す素材から構成される物体であってもよい。
【0035】
また、本実施形態では、対象物から移動体140に加わる負荷を使って軸受150の傾斜角度を変化させているが、例えば、主軸130を主軸方向に僅かに移動できるように構成して、図6(A)(B)に示すように、主軸130に対し、主軸方向に負荷を加えることによって軸受150の傾斜角度を変化させてもよい。
【0036】
また、軸受150の傾斜角度は1〜30°に限られない。軸受150は、主軸方向に対し、0°より大きく90°より小さいあらゆる角度に傾斜可能である。
【0037】
また、本実施形態では、主軸130と直交する方向(横軸方向)に横軸154を設置したが、軸受150が傾斜可能なのであれば、主軸130と交差するあらゆる方向に設置可能である。なお、弾性体155の設置位置も、縦軸方向に限られず、主軸130および横軸154と交差するあらゆる方向に設置可能である。
【0038】
また、本実施形態では、回転運動変換装置を把持装置に用いたが、例えば、図7に示すように、基体110の一端に滑車210を設け、さらに、滑車210を通したワイヤー220の一端を、移動体140に固定することによって、対象物を持ち上げるクレーン装置として構成してもよい。対象物の重さに応じて、対象物の上昇速度を変化させることができる。
【実施例】
【0039】
本発明の回転運動変換装置(以下、「斜旋回送りネジ」という)によって回転運動を直線運動に変換できることを検証した。
【0040】
製作した斜旋回送りネジを図8に示す。全質量は13.8gである。雌ネジはM4並目を用いており、ピッチは0.7mmである。雄ネジもM4並目を用いているが、ダイスを調節して成形することで少し細くなっており、山の先端にて計測した直径は3.6mmである。また、外輪の直径は14mmと小型である。ばねのばね定数は1.8N/mである。この斜旋回送りネジを実装したロボットグリッパを図9に示す。全質量は184gである。挟み口が(a)の方向に動くことにより把持を行うことができる。モータにはブラシレスモータを用いた。モータのトルク定数は2.7mNm/Aで質量は13gである。
【0041】
ストッパの位置よって、どのように出力される力が変化するかを検証した。ストッパの位置は厚さ0.05mmの座金を挟むことにより調節した。座金の枚数を増やすと図6で示したストッパの長さが短くなる。モータに1.5Aの一定の電流を流し、座金の枚数を変化させたときに出力される力を図10のように力センサを用い計測した。実験結果を図11に示す。この実験結果から、座金の枚数が2枚のときのストッパの位置が最も適切であることが分かる。
【0042】
次に、提案する機構が負荷に応じて減速比が変化することを検証した。図12のように出力に紐を取り付け、錘によって負荷を加えた。減速比を求めるために、モータの回転数と出力の速度を計測した。モータの回転数はホールセンサを用いて計測し、出力の速度は図12のように紐をプーリに経由させ、プーリの回転をエンコーダで計測することにより求めた。実験結果を図13に示す。ストッパに接触する2.0kgまでは減速比Rrが20から45まで増加し、その後はほぼ一定になっていることが分かる。なお、減速比Rrは、雄ネジを半径rの円筒、雌ネジを半径Rの円筒として考えたとき、下記式(1)により求まる値である。
【0043】
Rr=R/(R−r) ・・・(式1)
【0044】
次に、モータに流す電流に応じて、出力される力が変化することを検証した。モータに電流を1.0Aから2.0Aまで0.25Aおきに流したときの力を図14に示す。電流に応じて力が変化しており、2.0Aのとき134Nとなることが分かる。
【産業上の利用可能性】
【0045】
産業用ロボットをはじめ、回転運動を直線運動に変換する機構を備えた多くの装置で利用可能である。
【符号の説明】
【0046】
100 把持装置
110 基体
111 把持部
120 モータ
121 回転軸
130 主軸
140 移動体
141 把持部
142 筐体部
143 ストッパ
150 軸受
151 内輪
152 球体
153 外輪
154 横軸
155 弾性体
210 滑車
220 ワイヤー
【特許請求の範囲】
【請求項1】
ネジ山を有する主軸と、
該主軸を支持する軸受であって、前記主軸と接する面に前記ネジ山の直径より大きい直径のネジ溝が形成された内輪と、該内輪を回転可能に支持する外輪と、を有する軸受と、を備え、
前記軸受は、前記主軸の軸方向に対して所定の傾斜角度で傾斜しており、前記主軸を回転させたときに前記主軸の軸方向に直動する、
ことを特徴とする回転運動変換装置。
【請求項2】
傾斜角度を変化可能に、前記軸受を傾斜させる軸受傾斜機構、を備える、
ことを特徴とする請求項1に記載の回転運動変換装置。
【請求項3】
前記主軸と交差する交差方向を軸に前記軸受を回転可能に支持する軸受支持体、を備え、
前記軸受傾斜機構は、前記軸受と前記軸受支持体との間に配置される弾性体、を有し、
前記軸受は、前記軸受支持体または前記主軸に加わる軸方向の力によって、前記弾性体の弾性力に抗して前記交差方向を軸に回転する、
ことを特徴とする請求項2に記載の回転運動変換装置。
【請求項4】
前記弾性体はバネである、
ことを特徴とする請求項3に記載の回転運動変換装置。
【請求項1】
ネジ山を有する主軸と、
該主軸を支持する軸受であって、前記主軸と接する面に前記ネジ山の直径より大きい直径のネジ溝が形成された内輪と、該内輪を回転可能に支持する外輪と、を有する軸受と、を備え、
前記軸受は、前記主軸の軸方向に対して所定の傾斜角度で傾斜しており、前記主軸を回転させたときに前記主軸の軸方向に直動する、
ことを特徴とする回転運動変換装置。
【請求項2】
傾斜角度を変化可能に、前記軸受を傾斜させる軸受傾斜機構、を備える、
ことを特徴とする請求項1に記載の回転運動変換装置。
【請求項3】
前記主軸と交差する交差方向を軸に前記軸受を回転可能に支持する軸受支持体、を備え、
前記軸受傾斜機構は、前記軸受と前記軸受支持体との間に配置される弾性体、を有し、
前記軸受は、前記軸受支持体または前記主軸に加わる軸方向の力によって、前記弾性体の弾性力に抗して前記交差方向を軸に回転する、
ことを特徴とする請求項2に記載の回転運動変換装置。
【請求項4】
前記弾性体はバネである、
ことを特徴とする請求項3に記載の回転運動変換装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図11】
【図13】
【図14】
【図8】
【図9】
【図10】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図11】
【図13】
【図14】
【図8】
【図9】
【図10】
【図12】
【公開番号】特開2012−246954(P2012−246954A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117099(P2011−117099)
【出願日】平成23年5月25日(2011.5.25)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月25日(2011.5.25)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
[ Back to top ]