
回転電動機
【課題】内部の冷却、及び導線の取り回しが容易にできるモータを提供すること。
【解決手段】シャフト12と、ロータティース16を有してシャフト12に固定されるロータ15と、シャフト12の軸線方向に沿って延びるバイパスコア22を含むステータ17と、シャフト12とバイパスコア22とを磁気的に連結するとともに界磁コイル29が巻回され、界磁コイル29に通電した際にシャフト12、ロータティース16、バイパスコア22とともに磁路を形成する複数の腕部27bを含む界磁極26と、を備え、各腕部27bは、各腕部27bの間に空間Sbを形成するように配置されている。
【解決手段】シャフト12と、ロータティース16を有してシャフト12に固定されるロータ15と、シャフト12の軸線方向に沿って延びるバイパスコア22を含むステータ17と、シャフト12とバイパスコア22とを磁気的に連結するとともに界磁コイル29が巻回され、界磁コイル29に通電した際にシャフト12、ロータティース16、バイパスコア22とともに磁路を形成する複数の腕部27bを含む界磁極26と、を備え、各腕部27bは、各腕部27bの間に空間Sbを形成するように配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転電動機に関する。
【背景技術】
【0002】
従来から、永久磁石をロータに配設した永久磁石同期モータは、電気自動車やハイブリッド自動車などの様々な分野で駆動源として利用されている。このような永久磁石同期モータにおいて、強め磁界制御を行うことによって大きなトルクを得る一方で、弱め磁界制御を行うことによってステータとロータの間に生じる磁束量を低減して最大回転数を向上させることが提案されている(例えば、特許文献1,2)。
【0003】
特許文献1,2の回転電動機(以下「モータ」と示す)は、界磁極に形成した界磁コイルに通電することにより、シャフト、ロータ、ステータ、及び界磁極によって環状の磁路が形成される。このため、特許文献1,2では、ロータ(ロータティース)を通過する磁束量を、界磁コイルに流す電流量の変化に伴わせて効果的に変化させることができる。したがって、特許文献1,2のモータでは、界磁コイルの通電を制御することによって強め磁界制御及び弱め磁界制御を可能とし、大きなトルクを得られるとともに最大回転数を向上させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−43099号公報
【特許文献2】特開2009−273231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1,2のモータでは、界磁極コアを略円盤状に形成するとともに、この界磁極コアに対し、シャフトの軸線まわりで周回するように導線を巻回して界磁コイルを形成している。このため、特許文献1,2のモータでは、モータ内部に配設される電機子コイルやロータを冷却するための冷却媒体(例えば空気など)を界磁極側から導入することが困難であった。また、同様の理由で、特許文献1,2のモータでは、モータ内部に配設される電機子コイルなどへ通電するための導線を界磁極側から引き出すことができず、導線の取り回しに制約が生じていた。
【0006】
本発明は、上記従来技術に存在する問題点に着目してなされたものであり、その目的は、内部の冷却、及び導線の取り回しが容易にできるモータを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、請求項1に記載の発明は、第1磁性体を含むシャフトと、軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、前記第1磁性体と前記第2磁性体とを磁気的に連結するとともに界磁コイルが巻回され、当該界磁コイルに通電した際に前記第1磁性体、前記凸極部、及び前記第2磁性体とともに磁路を形成する複数の第3磁性体を含む界磁極と、を備え、前記複数の第3磁性体は、各第3磁性体の間に空間を形成するように配置されたことを要旨とする。
【0008】
これによれば、第3磁性体の界磁コイルに通電することにより、シャフトの第1磁性体、ロータの凸極部、ステータの第2磁性体、及び界磁極の第3磁性体によって磁路(界磁磁束の流れ)が形成できる。そして、各第3磁性体は、各第3磁性体の間に空間を形成するように配置される。このため、界磁極をなす第3磁性体の間に形成された空間を介して、回転電動機の内部に冷却媒体を導入し、モータの内部を容易に冷却できる。また、回転電動機内に配設されるコイルに通電するための導線を、前記空間を介して界磁極側から引き出すことが可能となり、導線の取り回しが容易にできる。
【0009】
請求項2に記載の発明は、請求項1に記載の回転電動機において、前記複数の第3磁性体は、前記シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされたことを要旨とする。
【0010】
これによれば、複数の第3磁性体は、シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされている。このため、各第3磁性体の間の空間を大きく形成し、モータの内部をより容易に冷却できるとともに、導線の取り回しが容易にできる。
【0011】
請求項3に記載の発明は、請求項1又は請求項2に記載の回転電動機において、前記ステータにおいて前記ロータとの対向面側には、複数の電機子コイルが形成されており、各第3磁性体には、前記ロータに対応する位置において前記シャフトの軸線方向のうち前記ロータ側へ近接するように近接部が形成され、前記界磁コイルは、前記近接部に巻回されたことを要旨とする。
【0012】
これによれば、各第3磁性体には、ロータに対応する位置においてロータ側に近接するように近接部が形成されるとともに、当該近接部に界磁コイルが巻回されている。このため、ロータに対応する位置、すなわち、ステータの電機子コイルが存在しない空間を利用して界磁コイルを配置できる。このため、界磁コイルがシャフトの軸線方向のうちロータの反対側に突出することを抑制し、回転電動機を小型化することができる。
【0013】
請求項4に記載の発明は、請求項3に記載の回転電動機において、前記各第3磁性体は、前記第1磁性体と前記第2磁性体とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されたことを要旨とする。これによれば、鋼板を積層することで近接部を形成することができる。したがって、第3磁性体を簡便に形成することができる。
【0014】
請求項5に記載の発明は、請求項1〜請求項4のうち何れか一項に記載の回転電動機において、前記各第3磁性体は、前記シャフトの外周面と向かい合うギャップ面を介して前記シャフトの第1磁性体と磁気的に連結されたことを要旨とする。
【0015】
これによれば、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトへ入るように磁路が形成され易い。したがって、凸極部における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。
【0016】
請求項6に記載の発明は、請求項1〜請求項5のうち何れか一項に記載の回転電動機において、前記界磁極は、前記シャフトの両端側に対をなすように配設されており、各界磁コイルには、各界磁極からの前記磁路が相対向する方向に形成されるように電流が流されることを要旨とする。
【0017】
これによれば、シャフトの両端側から磁路(界磁磁束の流れ)が相対向する方向に形成される。このため、シャフトの両端側の界磁極で発生された界磁磁束同士がシャフトで反発し合い、ロータの凸極部方向へ誘導される。したがって、ロータの凸極部における界磁磁束量を向上させ、より大きなトルクを得ることができる。
【発明の効果】
【0018】
本発明によれば、内部の冷却、及び導線の取り回しが容易にできる。
【図面の簡単な説明】
【0019】
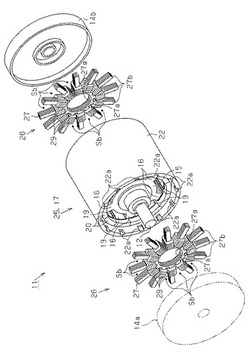
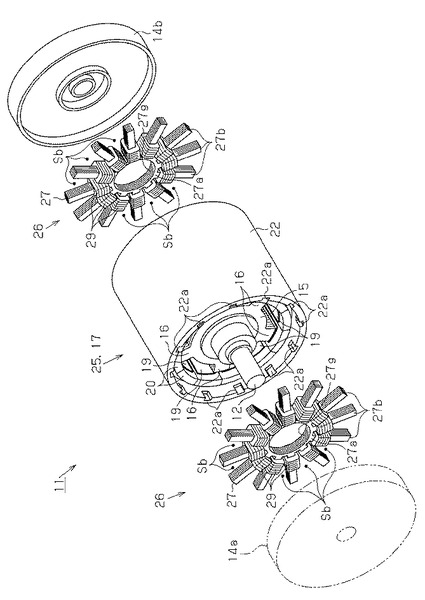
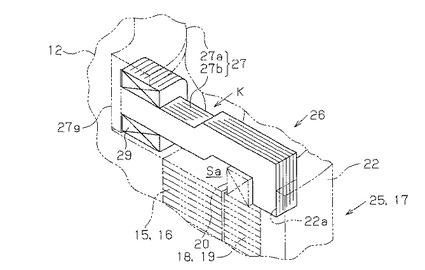
【図1】部分的に分解したモータを模式的に示す斜視図。
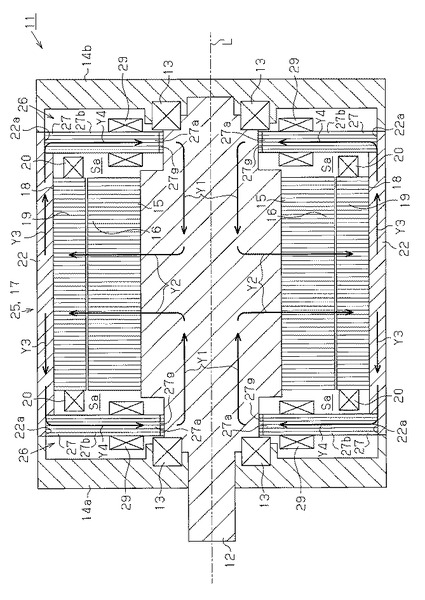
【図2】モータを模式的に示す断面図。
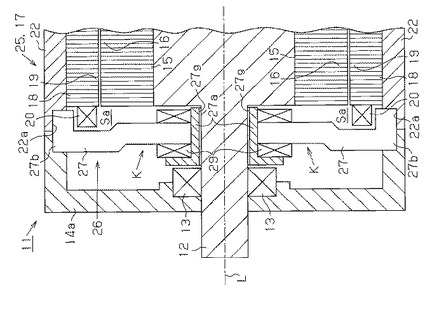
【図3】第2の実施形態におけるモータを模式的に示す断面図。
【図4】第2の実施形態におけるモータの一部を模式的に示す斜視図。
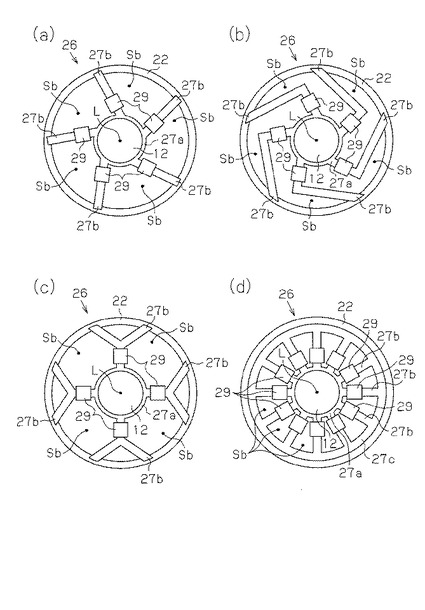
【図5】(a)〜(d)は、別例における界磁極コアを模式的に示す側面図。
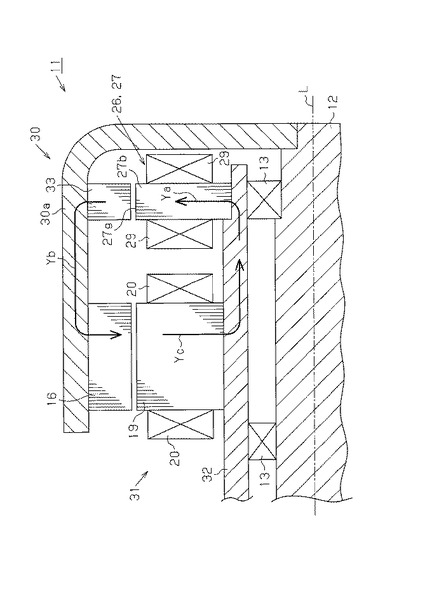
【図6】別例におけるモータの一部を模式的に示す断面図。
【発明を実施するための形態】
【0020】
(第1の実施形態)
以下、本発明を具体化した第1の実施形態について、図1、及び図2にしたがって説明する。
【0021】
図1、及び図2に示すように、回転電動機としてのモータ11は、軟磁性体としての軟磁性材料(例えば、鉄や、ケイ素鋼など)から形成された略円柱状のシャフト12を備えている。本実施形態では、シャフト12の全体が第1磁性体をなしている。このシャフト12は、ベアリング13を介してモータ11の両端をそれぞれ覆う各ハウジング部材14a,14bに組み付けられており、当該各ハウジング部材14a,14bに対して、シャフト12の軸線Lまわりで回転可能に支持されている。なお、本実施形態の各ハウジング部材14a,14bには、各ハウジング部材14a,14bをシャフト12の軸線Lに沿った方向に貫通する図示しない複数の通気孔が設けられている。
【0022】
シャフト12には、ロータ(回転子)15が固定(固設)されている。このロータ15は、シャフト12の軸線Lまわりでシャフト12と一体に回転可能に構成されている。また、シャフト12の外周面とロータ15の内周面とは密着されている。このため、シャフト12とロータ15とは、磁気的に連結(結合、接続)されている。ロータ15は、軟磁性材料からなる複数枚の鋼板を軸線Lに沿った方向に積層して構成されている。このため、ロータ15内において、磁束が軸線Lに沿った方向よりも軸線Lに直交するロータ15の直径方向、及び周方向へ流れ易くなっている。
【0023】
ロータ15の外周面には、このロータ15の直径方向外側へ向かって突出するように、略立方体状をなす複数(本実施形態では5本)の凸極部としてのロータティース16が形成されている。ロータティース16は、ロータ15の外周面を周方向に等間隔(本実施形態では72°間隔)に分割するように形成されているとともに、各ロータティース16の先端面は、何れも同一周面上に位置している。また、各ロータティース16は、軸線Lに沿ったロータ15の全幅にわたって形成されている。換言すれば、本実施形態のロータティース16は、ロータ15の外周面からシャフト12に向かって、シャフト12の軸線Lに沿って延びる凹部を設けることにより形成されていると把握できる。このように、本実施形態のロータ15は、永久磁石を備えない構成とされている。
【0024】
ロータ15の周囲には、このロータ15を囲うように円環状のステータ(固定子)17が配設されている。ステータ17は、その内周面側に軟磁性材料からなる複数枚の鋼板を軸線Lに沿った方向に積層して構成したステータコア18を備えている。このため、ステータコア18内において、磁束がシャフト12の軸線Lに沿った方向よりもこの軸線Lに直交するステータコア18の直径方向、及び周方向へ流れ易くなっている。また、軸線Lに沿ったステータコア18の寸法は、軸線Lに沿ったロータ15の寸法と同一寸法に設定されている。
【0025】
また、ステータコア18には、このステータコア18の内周面からシャフト12に向かって突出するように複数(本実施形態では12本)のステータティース19が形成されているとともに、各ステータティース19は、ステータコア18の内周面を周方向に等間隔(本実施形態では30°間隔)に分割するように形成されている。各ロータティース16の先端面(ロータ15の外周面)と、ステータティース19(ステータ17)の内周面との間には、僅かな隙間(例えば、0.7mm)が形成されている。各ステータティース19には、導線が巻回(本実施形態では、集中巻)されて、電機子コイルとしてのステータコイル20が形成されている。すなわち、本実施形態では、ステータ17において、ロータ15との対向面にステータコイル20が形成されている。各ステータコイル20は、U相巻線、V相巻線、及びW相巻線の何れかとされており、それぞれ位相差の異なる電流を流すことによって回転磁界を発生させるようになっている。
【0026】
また、前述のように、ステータ17(ステータティース19)とロータ15は、軸線Lに沿った寸法を同一寸法に設定されていることから、軸線Lに沿った方向におけるステータコイル20の両端部(コイルエンド)は、ロータ15の両端よりも軸線Lに沿った方向のうち外側に突出している。したがって、軸線Lに沿った方向におけるロータ15の両端面に対応する位置には、ステータコイル20とシャフト12とに挟まれた円環状の空間Saが形成されている(図2に示す)。
【0027】
また、ステータ17には、軸線Lに沿って延びるように形成され、ステータコア18の外周面を全周にわたって覆う円筒状の第2磁性体としてのバイパスコア22が配設されている。バイパスコア22は、粉末成型磁性体(SMC:Soft Magnetic Composites)から形成されている。また、ステータコア18の外周面と、バイパスコア22の内周面とは密着されている。このため、ステータコア18とバイパスコア22とは、磁気的に連結されている。また、軸線Lに沿った方向におけるバイパスコア22の両端の内周面には、それぞれ先端面から軸線Lの方向に沿って略直方体状に切り欠き形成した複数(本実施形態では12個)の凹部22aが設けられている。本実施形態では、シャフト12、ロータ15、及びステータ17が主電動機部25を構成している。
【0028】
軸線Lに沿った方向におけるシャフト12(主電動機部25)の両端側には、対をなすように界磁磁束を発生するための界磁極26が配設されている。各界磁極26は、バイパスコア22とシャフト12とを磁気的に連結する界磁極コア(界磁極ヨーク)27を備えている。界磁極コア27は、同一形状に打ち抜き形成された複数枚の鋼板を軸線Lに沿った方向に積層して形成されている。界磁極コア27には、円環状に形成されシャフト12を挿通するための固定部27aと、この固定部27aから軸線Lに直交し、且つ軸線Lから外側へ向けて放射状(スポーク状)に延びる複数本(本実施形態では12本)の第3磁性体としての腕部27bが形成されている。各腕部27bは、固定部27aの外周面を等間隔(本実施形態では30°間隔)に分割するように配置されている。また、軸線Lに直交する方向の外側に位置する各腕部27bの先端部(外側端)は、相互に連結されておらず開放状態とされている。また、各腕部27bにおいてシャフト12(固定部27b)側には、それぞれ導線が巻回されて界磁コイル29が形成されている。軸線Lから、当該軸線Lと直交する方向の外側に位置する各界磁コイル29の端部までの寸法は、何れも同一寸法に設定されているとともに、軸線Lからステータコイル20の内周面までの寸法よりも小さく設定されている。
【0029】
界磁極26は、主電動機部25(ステータ17)に対して、界磁極コア27の各腕部27bの先端部をバイパスコア22の両端部に形成された凹部22aに挿入するように組み付けられている。界磁極コア27をステータ17に組み付けた状態において、各腕部27bの先端部(先端面)は、バイパスコア22に対して密着されており、各腕部27b(界磁極コア27)とバイパスコア22(ステータ17)とは、磁気的に連結されている。また、界磁極コア27の固定部27aには、シャフト12が挿通される。固定部27aの内周面とシャフト12の外周面とは、相互に平行となるように対向配置されているとともに、両周面の間には僅かな隙間(例えば、0.3mm)が形成されている。本実施形態では、固定部27aの内周面がギャップ面27gとなる。このように、本実施形態において、界磁極コア27は、ギャップ面27gがシャフト12の外周面と向かい合うように(対向するように)配設されている。したがって、界磁極コア27(各腕部27b)とシャフト12とは、ギャップ面27gを介して磁気的に連結されている。また、本実施形態の各腕部27bは、シャフト12とバイパスコア22とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されていると把握できる。
【0030】
また、界磁極コア27をステータ17に組み付けた状態において、界磁コイル29は、ロータ15に対応する位置に配置されるとともに、空間Saに対して挿入された状態となる。すなわち、界磁コイル29とロータ15とは、ステータコイル20よりも軸線Lに沿った方向の内側(ロータ15側)で対向している。また、界磁極コア27をステータ17に組み付けた状態において、各腕部27bの間には、各腕部27bとバイパスコア22とに囲まれるように、シャフト12の端面側から見て略三角形状の空間Sbが形成される(図1に示す)。
【0031】
本実施形態のモータ11では、この空間Sbを介して、ステータコイル20へ通電するための図示しない導線がハウジング部材14b側からモータ11の外部へ引き出されている。また、各界磁極コア27の界磁コイル29には、磁路(界磁磁束の流れ)がステータ17(バイパスコア22)側からシャフト12側へ向かうように形成されるように、それぞれ電流が流されるようになっている。なお、軸線Lに沿った方向における主電動機部25の両端部は、前述したハウジング部材14a,14bに覆われており、ロータ15、ステータ17の内部、及び界磁極26が露出しないようになっている。
【0032】
次に、以上のように構成したモータ11の作用について、各界磁コイル29に通電した際に形成される磁路(界磁磁束の流れ)を中心に説明する。
図2に示すように、本実施形態のモータ11において、各界磁コイル29に電流が流されることにより各腕部27bに発生された界磁磁束は、両界磁極26の中間点へ向かって相互に対向するようにシャフト12を通過する(矢印Y1に示す)。そして、各界磁コイル29で発生された界磁磁束は、シャフト12内で反発し合う(ぶつかり合う)とともに、シャフト12の軸線Lに直交する方向(ロータ15の直径方向)へ誘導される(矢印Y2に示す)。ロータ15の各ロータティース16を通過した界磁磁束は、各ステータティース19を通過してバイパスコア22に入るとともに、各界磁極26へ向かって誘導される(矢印Y3に示す)。そして、バイパスコア22から各界磁極コア27の腕部27bに入った界磁磁束は、各腕部27bを通過するとともにギャップ面27gを介して再びシャフト12へ入る(矢印Y4に示す)。
【0033】
このように、本実施形態のモータ11では、シャフト12、ロータ15のロータティース16、バイパスコア22、及び界磁極26の界磁極コア27(腕部27b)の順に通過し、再びシャフト12へ入るように環状(ループ状)の磁路(界磁磁束の流れ)が形成される(矢印Y1〜Y4に示す)。このため、本実施形態のモータ11において、ロータ15のロータティース16は、界磁磁束によってN極の極性を持つことになる。すなわち、本実施形態では、ロータティース16(界磁磁束)が、永久磁石同期モータにおけるロータに配設された永久磁石と同様の働きを持つことになる。
【0034】
また、本実施形態のモータ11では、各界磁コイル29に流す電流量を増加させることで界磁磁束を増加させ、より大きなトルクを得ることができる。その一方で、本実施形態のモータ11では、高速回転時において各界磁コイル29に流す電流量を減少させることで界磁磁束を減少させ、最大回転数を向上させることができる。すなわち、本実施形態のモータ11では、強め磁界制御のみによって最大トルク及び最大回転数を向上させることができる。したがって、本実施形態のモータ11では、ロータ15に永久磁石を配設した場合に必要な弱め磁界制御が不要となり、その構成を簡略化できる。
【0035】
また、本実施形態のモータ11では、各ハウジング部材14a,14bに形成された通気孔、及び各腕部27b間に形成された空間Sbを介して、モータ11の外部の空気などの冷却媒体をモータ11の内部に導入し、モータ11の内部(ロータ15、ステータコア18、及びステータコイル20など)を容易に冷却することができる。
【0036】
したがって、本実施形態によれば、以下のような効果を得ることができる。
(1)界磁極コア27の各腕部27bに形成した界磁コイル29に通電することにより、シャフト12、ロータ15のロータティース16、ステータ17のバイパスコア22によって磁路(界磁磁束の流れ)が形成できる。そして、各腕部27bは、シャフト12の軸線Lと直交する方向に延びるように形成されているとともに、各腕部27bの間に空間Sbを形成するように配置されている。このため、界磁極コア27をなす腕部27bの間に形成された空間Sbを介して、モータ11の内部に冷却媒体を導入し、モータ11の内部を容易に冷却することができる。また、本実施形態では、腕部27bの間に形成された空間Sbを介して、モータ11内に形成されるコイル(ステータコイル20など)に通電するための導線を界磁極コア27側から引き出すことが可能となり、導線の取り回しが容易にできる。
【0037】
(2)特に、本実施形態のモータ11では、ステータ17にステータコイル20が形成されており、モータ11の側方から導線を引き出そうとした場合には、ステータコア18や、バイパスコア22を貫通するように引き出し口を設ける必要がある。この場合には、ステータコア18や、バイパスコア22に形成される磁路を部分的に分断する結果となり、モータ11の出力低下や、ロータティース16における磁束量が不均一となる虞がある。本実施形態では、モータ11内に形成されるコイル(ステータコイル20など)へ通電するための導線を、腕部27bに間に形成される空間Sbを介してハウジング部材14b側からモータ11の外部へ引き出し可能とすることで、このような問題を好適に解決している。
【0038】
(3)複数の腕部27bは、シャフト12から外側へ向けて放射状に延びるように形成されているとともに、各腕部27bの先端部は、相互に連結されておらず開放状態とされている。このため、各腕部27bの間の空間Sbを大きく形成し易く、モータ11の内部の冷却や、導線の取り回しをより容易にできる。
【0039】
(4)界磁極コア27のギャップ面27g(固定部27aの内周面)は、シャフト12の外周面と向かい合うように配置した。このため、ステータ17を通過した界磁磁束が界磁極コア27(腕部27b)を通過して再びシャフト12へ入るように磁路が形成され易くできる。したがって、ロータティース16における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。
【0040】
(5)シャフト12(主電動機部25)の両端側に対を成すように界磁極26を配設するとともに、各界磁極26に形成された界磁コイル29には、各界磁極26からの磁路(界磁磁束の流れ)が相対向する方向に形成されるように電流が流されるようにした。このため、シャフト12の両端側から磁路が相対向する方向に形成されるため、各界磁極26で発生された界磁磁束同士がシャフト12で反発しあうとともに、ロータ15の直径方向の外側(ロータティース16)へ誘導される。したがって、ロータ15のロータティース16における界磁磁束量を向上させ、より大きなトルクを得ることができる。
【0041】
(6)界磁極コア27を円盤状に形成する場合と比較して、磁性材料の使用量を削減できる。また、鋼板を積層して界磁極コア27を形成するため、SMCで形成する場合と比較して界磁極コア27の強度を向上させることができる。
【0042】
(7)各腕部27bを軸線Lに直交する方向に延びるように形成した。このため、界磁コイル29の巻数を増加させる場合であっても、各腕部27bの延びる方向に向かって順に巻回していけばよく、界磁コイル29の直径が増大することに伴って軸線Lに沿った方向へモータ11が大型化することを抑制できる。
【0043】
(8)界磁極26は、ステータ17に対して、界磁極コア27の各腕部27bの先端部をバイパスコア22の両端部に形成された凹部22aに挿入するように組み付けた。このため、単に、各腕部27bの先端部がバイパスコア22の両端面に接するように組み付ける場合と比較して、バイパスコア22と界磁極コア27(各腕部27b)との磁気的な連結を強めることができる。
【0044】
(9)本実施形態のモータ11では、ロータ15から永久磁石を省略できる。一般に、永久磁石同期モータに使用される永久磁石は、希土類磁石など希少性が高く高価な永久磁石が使用されており、モータの製造コストが増加する原因の1つとなっていた。これに対し、本実施形態のモータ11では、永久磁石が不要となり、モータ11のコスト増加を抑制することができる。
【0045】
(10)また、本実施形態のモータ11では、永久磁石を使用していないため、引きずり損の発生を抑制することができる。また、永久磁石同期モータにおいて、強め磁界制御や弱め磁界制御を行った場合には、N極とS極で磁束量がアンバランスとなってしまうが、本実施形態のモータ11では、このような問題が生じない。
【0046】
(11)また、永久磁石をロータ15の外周面に配設した構成や、ロータ15に巻線した構成と比較して、永久磁石や巻線が飛散するのを防止する構成(ロータ15を保護部材で覆うなど)が不要となり、ロータ15の構成を簡略化することができる。したがって、最大回転数の向上に資する。
【0047】
(12)本実施形態のモータ11では、永久磁石を用いる構成とは異なり、各界磁コイル29に通電することによって界磁磁束を発生させる構成を採用している。このため、本実施形態では、各界磁コイル29に流す界磁電流を制御することで界磁磁束量を自在に調整することができる。すなわち、本実施形態のモータ11では、界磁電流の制御によって、界磁磁束を増加させて最大トルクを向上させたり、界磁磁束を減少させて最大回転数を向上させたりできる。特に、本実施形態のモータ11では、強め磁界制御のみによって最大トルク及び最大回転数を向上させることができる。このため、モータ11の制御構成を簡略化することができる。
【0048】
(第2の実施形態)
次に、本発明を具体化した第2の実施形態について、図3及び図4にしたがって説明する。以下の説明では、既に説明した実施形態と同一構成、及び同一制御内容について同一符号を付すなどし、その重複する説明を省略及び簡略化する。なお、第2の実施形態では、界磁極コア27の形状が第1の実施形態と異なっており、その他の部分は同一とされている。
【0049】
図3及び図4に示すように、本実施形態の界磁極コア27は、略円環状に形成された軟磁性材料からなる固定部27aと、各腕部27bとが別体に形成されている。固定部27aには、シャフト12が挿通されているとともに、固定部27aの内周面は、シャフト12の外周面に対して僅かな隙間(例えば0.3mm)を介して対向配置されている。このため、固定部27aとシャフト12とは、磁気的に連結されている。本実施形態では、固定部27aの内周面がギャップ面27gとなる。
【0050】
また、本実施形態の各腕部27bは、軟磁性材料からなる複数枚の鋼板を、各腕部27bが伸びる方向と直交し、且つ軸線Lに直交する方向(すなわち軸線Lまわりの周方向)に積層して形成されている。各腕部27bは、固定部27aに対し、シャフト12側の基端部(基端面)が固定部27aの外周面に密着するように固定されており、各腕部27bと固定部27aとは、磁気的に連結されている。また、各腕部27bには、ロータ15(空間Sa)に対応する位置(領域)において、軸線Lに沿った方向のうちロータ15側に近接するように近接部Kが形成されている。また、各腕部27bは、近接部Kから軸線Lに沿った方向のうちロータ15とは反対側へ屈曲した後、ステータコイル20よりも軸線Lに直交する方向の外側において、シャフト12とは反対側の先端部(先端面)がバイパスコア22(ステータ17)の端面に向かう(対向する)ように再び屈曲されている。
【0051】
そして、腕部27bの近接部Kには、界磁コイル29が巻回されている。このため、界磁コイル29は、ロータ15に対応する位置に配置されるとともに、空間Saに対して挿入された状態となる。すなわち、界磁コイル29とロータ15とは、ステータコイル20のコイルエンドよりも軸線Lに沿った方向の内側(ロータ15側)で対向している。換言すれば、軸線Lに沿った方向において界磁コイル29のロータ15側の端部(コイルエンド)は、ステータコイル20のコイルエンドよりもロータ15側に位置している。
【0052】
したがって、本実施形態によれば、第1の実施形態の効果(1)〜(12)に加えて、以下のような効果を得ることができる。
(13)界磁極コア27の各腕部27bには、ロータ15(空間Sa)に対応する位置においてロータ15側へ近接するように近接部Kが形成されるとともに、当該近接部Kに界磁コイル29が巻回されている。このため、ロータ15に対応する位置(領域)、すなわち、ステータに形成されるステータコイル20が存在しない空間Saを利用して界磁コイル29を配置できる。このため、各界磁コイル29がシャフト12の軸線Lに沿った方向のうちロータ15の反対側(モータ11の外側)に突出することを抑制し、モータ11の小型化を図ることができる。
【0053】
(14)また、各腕部27bは、シャフト12とバイパスコア22とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されている。このため、本実施形態では、同一形状の鋼板を積層するだけで近接部Kを含む腕部27bの全体を簡便に形成することができる。
【0054】
なお、本実施形態は以下のように変更してもよい。
○ 上記第2の実施形態において、各腕部27bを形成する鋼板の積層方向は適宜変更してもよい。ただし、第2の実施形態のように、腕部27bを簡便に形成する観点からは、鋼板の積層方向を各腕部27bが伸びる方向と直交し、且つ軸線Lに直交する方向とするのが好ましい。
【0055】
○ 上記第2の実施形態において、固定部27a、及び各腕部27bを一体に形成してもよい。同様に、上記第1の実施形態において、固定部27a、及び各腕部27bを別体に形成してもよい。
【0056】
○ 上記各実施形態において、固定部27aを省略してもよい。すなわち、各腕部27bのシャフト12側の端面がシャフト12の外周面と向かい合うように固定されておればよい。この場合、各腕部27bのシャフト12側の基端面がギャップ面27gとなる。本別例では、各腕部27bが界磁極コア27をなす。
【0057】
○ 上記各実施形態において、界磁極コア27の腕部27bの本数を適宜変更してもよい。
○ 上記各実施形態において、界磁極コア27の各腕部27bを異なる形状としてもよい。以下、図5にしたがって具体的に説明する。なお、図5は、シャフト12の端面を正面にして見た状態を示すとともに、ハウジング部材14a、ロータ15(ロータティース16)、ステータコア18(ステータティース19)、ステータコイル20の図示を省略した模式図とされている。例えば、図5(a)に示すように、各腕部27bは、軸線Lと交差しない方向に向かって延びるように形成してもよい。また、図5(b)に示すように、各腕部27bは、屈曲していてもよい。また、図5(c)に示すように、各腕部27bは、ステータ17のバイパスコア22側で複数に分岐していてもよく、また逆に固定部27a(シャフト12)側で複数に分岐していてもよい。すなわち、各腕部27bは、軸線Lに沿った方向と交差する方向に延びるように形成されておればよい。より具体的に言えば、各腕部27bは、シャフト12の端面側から見て各腕部27bの中心線の全部、又は一部がシャフト12の軸線に沿った方向と交差しておればよく、中心線が軸線Lと交差していなくてもよい。また、各腕部27bは、シャフト12とステータ17のバイパスコア22とを磁気的に連結しておればどのような形状に形成してもよい。
【0058】
○ 上記各実施形態において、図5(d)に示すように、軸線Lに直交する方向の外側に位置する各腕部27bの先端部(外側端)を相互に連結する円環状の連結部27cを設けてもよい。このように形成しても、固定部27a、各腕部27b、及び連結部27cによって、空間Sbを形成することができる。
【0059】
○ 上記各実施形態において、各腕部27bは、シャフト12(固定部27a)側、又はステータ17側において、軸線Lに沿った方向のうちモータ11の外側に向かって突出するように傾斜させてもよい。
【0060】
○ 上記各実施形態において、バイパスコア22の凹部22aを省略してもよい。この場合には、各腕部27bの先端部(外側端)がバイパスコア22の先端面に接触するように界磁極26をステータ17に組み付ければよい。
【0061】
○ 上記各実施形態において、界磁コイル29は、各腕部27bに形成されておればよく、ステータ17側、あるいは腕部27bの全体にわたって形成されていてもよい。また、各界磁コイル29は、ロータ15に対応しない位置に形成されていてもよく、また空間Saの外に配設されていてもよい。ただし、モータ11を小型化する観点からは、上記各実施形態のように構成するのが好ましい。
【0062】
○ 上記各実施形態において、主電動機部25(シャフト12)の片方側にのみ界磁極26を設けてもよい。このように構成しても、界磁コイル29に通電することによって、シャフト12、ロータ15のロータティース16、バイパスコア22、及び界磁極コア27(各腕部27b)を順に通過して、再びシャフト12に入るように環状の磁路(界磁磁束の流れ)を形成することができる。ただし、界磁極26を片側だけ設ける構成とした場合には、発生させた界磁磁束の一部がロータ15(ロータティース16)へ入ることなくシャフト12を通ってしまう可能性があるため、上記各実施形態のように構成することが好ましい。
【0063】
○ 上記各実施形態において、ロータ15のロータティース16の数は、適宜変更してもよい。また、ステータ17のステータティース19の数は、適宜変更してもよい。すなわち、モータ11は、10極12スロットに構成することに限られず、20極24スロットなど異なる構成としてもよい。
【0064】
○ 上記実施形態において、分布巻により各ステータコイル20を形成してもよい。
○ 上記各実施形態において、シャフト12の磁路形成部位に別に軟磁性材料を配設してもよい。具体的に言えば、シャフト12において、対をなす界磁極26の各ギャップ面27gと対応する位置の間の全周に亘って軟磁性材料からなる円環状のシャフトバイパスコアを配設する。この場合、シャフトバイパスコアは、シャフト12の基部よりも渦電流損の少ない材質を用いるとよい。このように構成することで、ロータ15に形成されたロータティース16迄の磁路(界磁磁束の流れ)を形成し易くできる。したがって、ロータティース16における界磁磁束量を向上させ、より大きなトルクを得ることができる。なお、この場合、シャフト12の基部は、非磁性材料で形成してもよい。
【0065】
○ 上記各実施形態において、各ロータティース16の形状は適宜変更してもよい。すなわち、各ロータティース16がロータ15の直径方向へ磁束を通し易い凸極部として機能すればよい。
【0066】
○ 上記各実施形態において、バイパスコア22の形状は適宜変更してもよい。すなわち、バイパスコア22は、ロータ15のロータティース16から受け入れた界磁磁束を各腕部27bへ誘導可能であればよい。
【0067】
○ 上記実施形態において、各ロータティース16間に非磁性材料からなるスペーサを配設するようにしてもよい。
○ 上記実施形態において、モータ11は、アウターロータ型のモータとして具体化してもよい。具体的に言えば、図6に示すように、シャフト12には、軟磁性材料からなる有底筒状のアウターロータ本体(第1磁性体)30aがシャフト12と一体に回転可能に固着されている。アウターロータ本体30aの内周面には、複数のロータティース(凸極部)16が形成されている。アウターロータ本体30a、及びロータティース16は、アウターロータ30をなす。また、アウターロータ30の内側には、ステータ31が配設されている。ステータ31において、軟磁性材料からなる円筒状の鉄心(第2磁性体)32の外周面には、複数のステータティース19が形成されているとともに、各ステータティース19には、ステータコイル20が形成されている。また、鉄心32の内側には、シャフト12がベアリング13を介して軸線Lまわりで回転可能に支持されている。また、鉄心32外周面には、ステータティース19よりもアウターロータ本体30aの底部側に、鉄心32から外側へ向けて放射状に延びる複数本の腕部(第3磁性体)27bが形成されている。本別例では、各腕部27bが界磁極コア27をなす。各腕部27bには、それぞれ界磁コイル29が形成されているとともに、アウターロータ本体30aの内周面において腕部27bに対応する位置には、内側に帯状に突出する円環状の突出部33が形成されている。各腕部27b、及び突出部33は、複数枚の鋼板を積層して形成されている。このように構成しても、各界磁コイル29に電流を流すことにより発生した磁束が各腕部27b、突出部33、アウターロータ本体30a、ロータティース16、ステータティース19、及び鉄心32の順に通過し、再び各腕部27bへ入るように、環状の磁路(界磁磁束の流れ)を形成することができる(矢印Ya〜Ycに示す)。なお、この場合、各腕部27b及び突出部33は、ステータティース19よりもアウターロータ本体30aの開口部側に設けてもよい。
【0068】
以下、上記各実施形態、及び別例(変形例)から把握できる技術的思想を追記する。
(イ)前記複数の第3磁性体は、それぞれ前記シャフトの軸線に沿った方向と交差する方向に延びるように形成された請求項1に記載の回転電動機。
【0069】
(ロ)第1磁性体を含むシャフトと、軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、前記第1磁性体と前記第2磁性体とを磁気的に連結する第3磁性体、及び界磁コイルを含む界磁極と、を備え、前記界磁コイルに通電した際に前記第1磁性体、前記凸極部、前記第2磁性体、及び前記第3磁性体によって磁路が形成され、前記第3磁性体のギャップ面は、前記シャフトの外周面に向かうように形成された回転電動機(以下、技術的思想ロと示す)。
【0070】
技術的思想ロによれば、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトの第1磁性体へ入るように磁路が形成され易い。したがって、凸極部における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。前述した特開2008−43099号公報(特許文献1)、及び特開2009−273231号公報(特許文献2)では、界磁極コアのギャップ面がシャフト12の外周面に向かうように構成されていない。技術的思想ロによれば、特許文献1,2の構成と比較して、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトへ入るように磁路が形成され易くできる。なお、技術的思想ロにおける「第3磁性体」は、上記各実施形態のように複数の腕部27bとして形成することに限られず、円盤状に形成することも含む。
【符号の説明】
【0071】
11…モータ(回転電動機)、12…シャフト(第1磁性体)、15…ロータ、16…ロータティース(凸極部)、17,31…ステータ、20…ステータコイル(電機子コイル)、22…バイパスコア(第2磁性体)、26…界磁極、27…界磁極コア、27a…固定部、27b…腕部(第3磁性体)、27g…ギャップ面、29…界磁コイル、30…アウターロータ、30a…アウターロータ本体(第1磁性体)、32…鉄心(第2磁性体)、K…近接部、L…軸線、Sb…空間。
【技術分野】
【0001】
本発明は、回転電動機に関する。
【背景技術】
【0002】
従来から、永久磁石をロータに配設した永久磁石同期モータは、電気自動車やハイブリッド自動車などの様々な分野で駆動源として利用されている。このような永久磁石同期モータにおいて、強め磁界制御を行うことによって大きなトルクを得る一方で、弱め磁界制御を行うことによってステータとロータの間に生じる磁束量を低減して最大回転数を向上させることが提案されている(例えば、特許文献1,2)。
【0003】
特許文献1,2の回転電動機(以下「モータ」と示す)は、界磁極に形成した界磁コイルに通電することにより、シャフト、ロータ、ステータ、及び界磁極によって環状の磁路が形成される。このため、特許文献1,2では、ロータ(ロータティース)を通過する磁束量を、界磁コイルに流す電流量の変化に伴わせて効果的に変化させることができる。したがって、特許文献1,2のモータでは、界磁コイルの通電を制御することによって強め磁界制御及び弱め磁界制御を可能とし、大きなトルクを得られるとともに最大回転数を向上させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−43099号公報
【特許文献2】特開2009−273231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1,2のモータでは、界磁極コアを略円盤状に形成するとともに、この界磁極コアに対し、シャフトの軸線まわりで周回するように導線を巻回して界磁コイルを形成している。このため、特許文献1,2のモータでは、モータ内部に配設される電機子コイルやロータを冷却するための冷却媒体(例えば空気など)を界磁極側から導入することが困難であった。また、同様の理由で、特許文献1,2のモータでは、モータ内部に配設される電機子コイルなどへ通電するための導線を界磁極側から引き出すことができず、導線の取り回しに制約が生じていた。
【0006】
本発明は、上記従来技術に存在する問題点に着目してなされたものであり、その目的は、内部の冷却、及び導線の取り回しが容易にできるモータを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、請求項1に記載の発明は、第1磁性体を含むシャフトと、軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、前記第1磁性体と前記第2磁性体とを磁気的に連結するとともに界磁コイルが巻回され、当該界磁コイルに通電した際に前記第1磁性体、前記凸極部、及び前記第2磁性体とともに磁路を形成する複数の第3磁性体を含む界磁極と、を備え、前記複数の第3磁性体は、各第3磁性体の間に空間を形成するように配置されたことを要旨とする。
【0008】
これによれば、第3磁性体の界磁コイルに通電することにより、シャフトの第1磁性体、ロータの凸極部、ステータの第2磁性体、及び界磁極の第3磁性体によって磁路(界磁磁束の流れ)が形成できる。そして、各第3磁性体は、各第3磁性体の間に空間を形成するように配置される。このため、界磁極をなす第3磁性体の間に形成された空間を介して、回転電動機の内部に冷却媒体を導入し、モータの内部を容易に冷却できる。また、回転電動機内に配設されるコイルに通電するための導線を、前記空間を介して界磁極側から引き出すことが可能となり、導線の取り回しが容易にできる。
【0009】
請求項2に記載の発明は、請求項1に記載の回転電動機において、前記複数の第3磁性体は、前記シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされたことを要旨とする。
【0010】
これによれば、複数の第3磁性体は、シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされている。このため、各第3磁性体の間の空間を大きく形成し、モータの内部をより容易に冷却できるとともに、導線の取り回しが容易にできる。
【0011】
請求項3に記載の発明は、請求項1又は請求項2に記載の回転電動機において、前記ステータにおいて前記ロータとの対向面側には、複数の電機子コイルが形成されており、各第3磁性体には、前記ロータに対応する位置において前記シャフトの軸線方向のうち前記ロータ側へ近接するように近接部が形成され、前記界磁コイルは、前記近接部に巻回されたことを要旨とする。
【0012】
これによれば、各第3磁性体には、ロータに対応する位置においてロータ側に近接するように近接部が形成されるとともに、当該近接部に界磁コイルが巻回されている。このため、ロータに対応する位置、すなわち、ステータの電機子コイルが存在しない空間を利用して界磁コイルを配置できる。このため、界磁コイルがシャフトの軸線方向のうちロータの反対側に突出することを抑制し、回転電動機を小型化することができる。
【0013】
請求項4に記載の発明は、請求項3に記載の回転電動機において、前記各第3磁性体は、前記第1磁性体と前記第2磁性体とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されたことを要旨とする。これによれば、鋼板を積層することで近接部を形成することができる。したがって、第3磁性体を簡便に形成することができる。
【0014】
請求項5に記載の発明は、請求項1〜請求項4のうち何れか一項に記載の回転電動機において、前記各第3磁性体は、前記シャフトの外周面と向かい合うギャップ面を介して前記シャフトの第1磁性体と磁気的に連結されたことを要旨とする。
【0015】
これによれば、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトへ入るように磁路が形成され易い。したがって、凸極部における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。
【0016】
請求項6に記載の発明は、請求項1〜請求項5のうち何れか一項に記載の回転電動機において、前記界磁極は、前記シャフトの両端側に対をなすように配設されており、各界磁コイルには、各界磁極からの前記磁路が相対向する方向に形成されるように電流が流されることを要旨とする。
【0017】
これによれば、シャフトの両端側から磁路(界磁磁束の流れ)が相対向する方向に形成される。このため、シャフトの両端側の界磁極で発生された界磁磁束同士がシャフトで反発し合い、ロータの凸極部方向へ誘導される。したがって、ロータの凸極部における界磁磁束量を向上させ、より大きなトルクを得ることができる。
【発明の効果】
【0018】
本発明によれば、内部の冷却、及び導線の取り回しが容易にできる。
【図面の簡単な説明】
【0019】
【図1】部分的に分解したモータを模式的に示す斜視図。
【図2】モータを模式的に示す断面図。
【図3】第2の実施形態におけるモータを模式的に示す断面図。
【図4】第2の実施形態におけるモータの一部を模式的に示す斜視図。
【図5】(a)〜(d)は、別例における界磁極コアを模式的に示す側面図。
【図6】別例におけるモータの一部を模式的に示す断面図。
【発明を実施するための形態】
【0020】
(第1の実施形態)
以下、本発明を具体化した第1の実施形態について、図1、及び図2にしたがって説明する。
【0021】
図1、及び図2に示すように、回転電動機としてのモータ11は、軟磁性体としての軟磁性材料(例えば、鉄や、ケイ素鋼など)から形成された略円柱状のシャフト12を備えている。本実施形態では、シャフト12の全体が第1磁性体をなしている。このシャフト12は、ベアリング13を介してモータ11の両端をそれぞれ覆う各ハウジング部材14a,14bに組み付けられており、当該各ハウジング部材14a,14bに対して、シャフト12の軸線Lまわりで回転可能に支持されている。なお、本実施形態の各ハウジング部材14a,14bには、各ハウジング部材14a,14bをシャフト12の軸線Lに沿った方向に貫通する図示しない複数の通気孔が設けられている。
【0022】
シャフト12には、ロータ(回転子)15が固定(固設)されている。このロータ15は、シャフト12の軸線Lまわりでシャフト12と一体に回転可能に構成されている。また、シャフト12の外周面とロータ15の内周面とは密着されている。このため、シャフト12とロータ15とは、磁気的に連結(結合、接続)されている。ロータ15は、軟磁性材料からなる複数枚の鋼板を軸線Lに沿った方向に積層して構成されている。このため、ロータ15内において、磁束が軸線Lに沿った方向よりも軸線Lに直交するロータ15の直径方向、及び周方向へ流れ易くなっている。
【0023】
ロータ15の外周面には、このロータ15の直径方向外側へ向かって突出するように、略立方体状をなす複数(本実施形態では5本)の凸極部としてのロータティース16が形成されている。ロータティース16は、ロータ15の外周面を周方向に等間隔(本実施形態では72°間隔)に分割するように形成されているとともに、各ロータティース16の先端面は、何れも同一周面上に位置している。また、各ロータティース16は、軸線Lに沿ったロータ15の全幅にわたって形成されている。換言すれば、本実施形態のロータティース16は、ロータ15の外周面からシャフト12に向かって、シャフト12の軸線Lに沿って延びる凹部を設けることにより形成されていると把握できる。このように、本実施形態のロータ15は、永久磁石を備えない構成とされている。
【0024】
ロータ15の周囲には、このロータ15を囲うように円環状のステータ(固定子)17が配設されている。ステータ17は、その内周面側に軟磁性材料からなる複数枚の鋼板を軸線Lに沿った方向に積層して構成したステータコア18を備えている。このため、ステータコア18内において、磁束がシャフト12の軸線Lに沿った方向よりもこの軸線Lに直交するステータコア18の直径方向、及び周方向へ流れ易くなっている。また、軸線Lに沿ったステータコア18の寸法は、軸線Lに沿ったロータ15の寸法と同一寸法に設定されている。
【0025】
また、ステータコア18には、このステータコア18の内周面からシャフト12に向かって突出するように複数(本実施形態では12本)のステータティース19が形成されているとともに、各ステータティース19は、ステータコア18の内周面を周方向に等間隔(本実施形態では30°間隔)に分割するように形成されている。各ロータティース16の先端面(ロータ15の外周面)と、ステータティース19(ステータ17)の内周面との間には、僅かな隙間(例えば、0.7mm)が形成されている。各ステータティース19には、導線が巻回(本実施形態では、集中巻)されて、電機子コイルとしてのステータコイル20が形成されている。すなわち、本実施形態では、ステータ17において、ロータ15との対向面にステータコイル20が形成されている。各ステータコイル20は、U相巻線、V相巻線、及びW相巻線の何れかとされており、それぞれ位相差の異なる電流を流すことによって回転磁界を発生させるようになっている。
【0026】
また、前述のように、ステータ17(ステータティース19)とロータ15は、軸線Lに沿った寸法を同一寸法に設定されていることから、軸線Lに沿った方向におけるステータコイル20の両端部(コイルエンド)は、ロータ15の両端よりも軸線Lに沿った方向のうち外側に突出している。したがって、軸線Lに沿った方向におけるロータ15の両端面に対応する位置には、ステータコイル20とシャフト12とに挟まれた円環状の空間Saが形成されている(図2に示す)。
【0027】
また、ステータ17には、軸線Lに沿って延びるように形成され、ステータコア18の外周面を全周にわたって覆う円筒状の第2磁性体としてのバイパスコア22が配設されている。バイパスコア22は、粉末成型磁性体(SMC:Soft Magnetic Composites)から形成されている。また、ステータコア18の外周面と、バイパスコア22の内周面とは密着されている。このため、ステータコア18とバイパスコア22とは、磁気的に連結されている。また、軸線Lに沿った方向におけるバイパスコア22の両端の内周面には、それぞれ先端面から軸線Lの方向に沿って略直方体状に切り欠き形成した複数(本実施形態では12個)の凹部22aが設けられている。本実施形態では、シャフト12、ロータ15、及びステータ17が主電動機部25を構成している。
【0028】
軸線Lに沿った方向におけるシャフト12(主電動機部25)の両端側には、対をなすように界磁磁束を発生するための界磁極26が配設されている。各界磁極26は、バイパスコア22とシャフト12とを磁気的に連結する界磁極コア(界磁極ヨーク)27を備えている。界磁極コア27は、同一形状に打ち抜き形成された複数枚の鋼板を軸線Lに沿った方向に積層して形成されている。界磁極コア27には、円環状に形成されシャフト12を挿通するための固定部27aと、この固定部27aから軸線Lに直交し、且つ軸線Lから外側へ向けて放射状(スポーク状)に延びる複数本(本実施形態では12本)の第3磁性体としての腕部27bが形成されている。各腕部27bは、固定部27aの外周面を等間隔(本実施形態では30°間隔)に分割するように配置されている。また、軸線Lに直交する方向の外側に位置する各腕部27bの先端部(外側端)は、相互に連結されておらず開放状態とされている。また、各腕部27bにおいてシャフト12(固定部27b)側には、それぞれ導線が巻回されて界磁コイル29が形成されている。軸線Lから、当該軸線Lと直交する方向の外側に位置する各界磁コイル29の端部までの寸法は、何れも同一寸法に設定されているとともに、軸線Lからステータコイル20の内周面までの寸法よりも小さく設定されている。
【0029】
界磁極26は、主電動機部25(ステータ17)に対して、界磁極コア27の各腕部27bの先端部をバイパスコア22の両端部に形成された凹部22aに挿入するように組み付けられている。界磁極コア27をステータ17に組み付けた状態において、各腕部27bの先端部(先端面)は、バイパスコア22に対して密着されており、各腕部27b(界磁極コア27)とバイパスコア22(ステータ17)とは、磁気的に連結されている。また、界磁極コア27の固定部27aには、シャフト12が挿通される。固定部27aの内周面とシャフト12の外周面とは、相互に平行となるように対向配置されているとともに、両周面の間には僅かな隙間(例えば、0.3mm)が形成されている。本実施形態では、固定部27aの内周面がギャップ面27gとなる。このように、本実施形態において、界磁極コア27は、ギャップ面27gがシャフト12の外周面と向かい合うように(対向するように)配設されている。したがって、界磁極コア27(各腕部27b)とシャフト12とは、ギャップ面27gを介して磁気的に連結されている。また、本実施形態の各腕部27bは、シャフト12とバイパスコア22とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されていると把握できる。
【0030】
また、界磁極コア27をステータ17に組み付けた状態において、界磁コイル29は、ロータ15に対応する位置に配置されるとともに、空間Saに対して挿入された状態となる。すなわち、界磁コイル29とロータ15とは、ステータコイル20よりも軸線Lに沿った方向の内側(ロータ15側)で対向している。また、界磁極コア27をステータ17に組み付けた状態において、各腕部27bの間には、各腕部27bとバイパスコア22とに囲まれるように、シャフト12の端面側から見て略三角形状の空間Sbが形成される(図1に示す)。
【0031】
本実施形態のモータ11では、この空間Sbを介して、ステータコイル20へ通電するための図示しない導線がハウジング部材14b側からモータ11の外部へ引き出されている。また、各界磁極コア27の界磁コイル29には、磁路(界磁磁束の流れ)がステータ17(バイパスコア22)側からシャフト12側へ向かうように形成されるように、それぞれ電流が流されるようになっている。なお、軸線Lに沿った方向における主電動機部25の両端部は、前述したハウジング部材14a,14bに覆われており、ロータ15、ステータ17の内部、及び界磁極26が露出しないようになっている。
【0032】
次に、以上のように構成したモータ11の作用について、各界磁コイル29に通電した際に形成される磁路(界磁磁束の流れ)を中心に説明する。
図2に示すように、本実施形態のモータ11において、各界磁コイル29に電流が流されることにより各腕部27bに発生された界磁磁束は、両界磁極26の中間点へ向かって相互に対向するようにシャフト12を通過する(矢印Y1に示す)。そして、各界磁コイル29で発生された界磁磁束は、シャフト12内で反発し合う(ぶつかり合う)とともに、シャフト12の軸線Lに直交する方向(ロータ15の直径方向)へ誘導される(矢印Y2に示す)。ロータ15の各ロータティース16を通過した界磁磁束は、各ステータティース19を通過してバイパスコア22に入るとともに、各界磁極26へ向かって誘導される(矢印Y3に示す)。そして、バイパスコア22から各界磁極コア27の腕部27bに入った界磁磁束は、各腕部27bを通過するとともにギャップ面27gを介して再びシャフト12へ入る(矢印Y4に示す)。
【0033】
このように、本実施形態のモータ11では、シャフト12、ロータ15のロータティース16、バイパスコア22、及び界磁極26の界磁極コア27(腕部27b)の順に通過し、再びシャフト12へ入るように環状(ループ状)の磁路(界磁磁束の流れ)が形成される(矢印Y1〜Y4に示す)。このため、本実施形態のモータ11において、ロータ15のロータティース16は、界磁磁束によってN極の極性を持つことになる。すなわち、本実施形態では、ロータティース16(界磁磁束)が、永久磁石同期モータにおけるロータに配設された永久磁石と同様の働きを持つことになる。
【0034】
また、本実施形態のモータ11では、各界磁コイル29に流す電流量を増加させることで界磁磁束を増加させ、より大きなトルクを得ることができる。その一方で、本実施形態のモータ11では、高速回転時において各界磁コイル29に流す電流量を減少させることで界磁磁束を減少させ、最大回転数を向上させることができる。すなわち、本実施形態のモータ11では、強め磁界制御のみによって最大トルク及び最大回転数を向上させることができる。したがって、本実施形態のモータ11では、ロータ15に永久磁石を配設した場合に必要な弱め磁界制御が不要となり、その構成を簡略化できる。
【0035】
また、本実施形態のモータ11では、各ハウジング部材14a,14bに形成された通気孔、及び各腕部27b間に形成された空間Sbを介して、モータ11の外部の空気などの冷却媒体をモータ11の内部に導入し、モータ11の内部(ロータ15、ステータコア18、及びステータコイル20など)を容易に冷却することができる。
【0036】
したがって、本実施形態によれば、以下のような効果を得ることができる。
(1)界磁極コア27の各腕部27bに形成した界磁コイル29に通電することにより、シャフト12、ロータ15のロータティース16、ステータ17のバイパスコア22によって磁路(界磁磁束の流れ)が形成できる。そして、各腕部27bは、シャフト12の軸線Lと直交する方向に延びるように形成されているとともに、各腕部27bの間に空間Sbを形成するように配置されている。このため、界磁極コア27をなす腕部27bの間に形成された空間Sbを介して、モータ11の内部に冷却媒体を導入し、モータ11の内部を容易に冷却することができる。また、本実施形態では、腕部27bの間に形成された空間Sbを介して、モータ11内に形成されるコイル(ステータコイル20など)に通電するための導線を界磁極コア27側から引き出すことが可能となり、導線の取り回しが容易にできる。
【0037】
(2)特に、本実施形態のモータ11では、ステータ17にステータコイル20が形成されており、モータ11の側方から導線を引き出そうとした場合には、ステータコア18や、バイパスコア22を貫通するように引き出し口を設ける必要がある。この場合には、ステータコア18や、バイパスコア22に形成される磁路を部分的に分断する結果となり、モータ11の出力低下や、ロータティース16における磁束量が不均一となる虞がある。本実施形態では、モータ11内に形成されるコイル(ステータコイル20など)へ通電するための導線を、腕部27bに間に形成される空間Sbを介してハウジング部材14b側からモータ11の外部へ引き出し可能とすることで、このような問題を好適に解決している。
【0038】
(3)複数の腕部27bは、シャフト12から外側へ向けて放射状に延びるように形成されているとともに、各腕部27bの先端部は、相互に連結されておらず開放状態とされている。このため、各腕部27bの間の空間Sbを大きく形成し易く、モータ11の内部の冷却や、導線の取り回しをより容易にできる。
【0039】
(4)界磁極コア27のギャップ面27g(固定部27aの内周面)は、シャフト12の外周面と向かい合うように配置した。このため、ステータ17を通過した界磁磁束が界磁極コア27(腕部27b)を通過して再びシャフト12へ入るように磁路が形成され易くできる。したがって、ロータティース16における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。
【0040】
(5)シャフト12(主電動機部25)の両端側に対を成すように界磁極26を配設するとともに、各界磁極26に形成された界磁コイル29には、各界磁極26からの磁路(界磁磁束の流れ)が相対向する方向に形成されるように電流が流されるようにした。このため、シャフト12の両端側から磁路が相対向する方向に形成されるため、各界磁極26で発生された界磁磁束同士がシャフト12で反発しあうとともに、ロータ15の直径方向の外側(ロータティース16)へ誘導される。したがって、ロータ15のロータティース16における界磁磁束量を向上させ、より大きなトルクを得ることができる。
【0041】
(6)界磁極コア27を円盤状に形成する場合と比較して、磁性材料の使用量を削減できる。また、鋼板を積層して界磁極コア27を形成するため、SMCで形成する場合と比較して界磁極コア27の強度を向上させることができる。
【0042】
(7)各腕部27bを軸線Lに直交する方向に延びるように形成した。このため、界磁コイル29の巻数を増加させる場合であっても、各腕部27bの延びる方向に向かって順に巻回していけばよく、界磁コイル29の直径が増大することに伴って軸線Lに沿った方向へモータ11が大型化することを抑制できる。
【0043】
(8)界磁極26は、ステータ17に対して、界磁極コア27の各腕部27bの先端部をバイパスコア22の両端部に形成された凹部22aに挿入するように組み付けた。このため、単に、各腕部27bの先端部がバイパスコア22の両端面に接するように組み付ける場合と比較して、バイパスコア22と界磁極コア27(各腕部27b)との磁気的な連結を強めることができる。
【0044】
(9)本実施形態のモータ11では、ロータ15から永久磁石を省略できる。一般に、永久磁石同期モータに使用される永久磁石は、希土類磁石など希少性が高く高価な永久磁石が使用されており、モータの製造コストが増加する原因の1つとなっていた。これに対し、本実施形態のモータ11では、永久磁石が不要となり、モータ11のコスト増加を抑制することができる。
【0045】
(10)また、本実施形態のモータ11では、永久磁石を使用していないため、引きずり損の発生を抑制することができる。また、永久磁石同期モータにおいて、強め磁界制御や弱め磁界制御を行った場合には、N極とS極で磁束量がアンバランスとなってしまうが、本実施形態のモータ11では、このような問題が生じない。
【0046】
(11)また、永久磁石をロータ15の外周面に配設した構成や、ロータ15に巻線した構成と比較して、永久磁石や巻線が飛散するのを防止する構成(ロータ15を保護部材で覆うなど)が不要となり、ロータ15の構成を簡略化することができる。したがって、最大回転数の向上に資する。
【0047】
(12)本実施形態のモータ11では、永久磁石を用いる構成とは異なり、各界磁コイル29に通電することによって界磁磁束を発生させる構成を採用している。このため、本実施形態では、各界磁コイル29に流す界磁電流を制御することで界磁磁束量を自在に調整することができる。すなわち、本実施形態のモータ11では、界磁電流の制御によって、界磁磁束を増加させて最大トルクを向上させたり、界磁磁束を減少させて最大回転数を向上させたりできる。特に、本実施形態のモータ11では、強め磁界制御のみによって最大トルク及び最大回転数を向上させることができる。このため、モータ11の制御構成を簡略化することができる。
【0048】
(第2の実施形態)
次に、本発明を具体化した第2の実施形態について、図3及び図4にしたがって説明する。以下の説明では、既に説明した実施形態と同一構成、及び同一制御内容について同一符号を付すなどし、その重複する説明を省略及び簡略化する。なお、第2の実施形態では、界磁極コア27の形状が第1の実施形態と異なっており、その他の部分は同一とされている。
【0049】
図3及び図4に示すように、本実施形態の界磁極コア27は、略円環状に形成された軟磁性材料からなる固定部27aと、各腕部27bとが別体に形成されている。固定部27aには、シャフト12が挿通されているとともに、固定部27aの内周面は、シャフト12の外周面に対して僅かな隙間(例えば0.3mm)を介して対向配置されている。このため、固定部27aとシャフト12とは、磁気的に連結されている。本実施形態では、固定部27aの内周面がギャップ面27gとなる。
【0050】
また、本実施形態の各腕部27bは、軟磁性材料からなる複数枚の鋼板を、各腕部27bが伸びる方向と直交し、且つ軸線Lに直交する方向(すなわち軸線Lまわりの周方向)に積層して形成されている。各腕部27bは、固定部27aに対し、シャフト12側の基端部(基端面)が固定部27aの外周面に密着するように固定されており、各腕部27bと固定部27aとは、磁気的に連結されている。また、各腕部27bには、ロータ15(空間Sa)に対応する位置(領域)において、軸線Lに沿った方向のうちロータ15側に近接するように近接部Kが形成されている。また、各腕部27bは、近接部Kから軸線Lに沿った方向のうちロータ15とは反対側へ屈曲した後、ステータコイル20よりも軸線Lに直交する方向の外側において、シャフト12とは反対側の先端部(先端面)がバイパスコア22(ステータ17)の端面に向かう(対向する)ように再び屈曲されている。
【0051】
そして、腕部27bの近接部Kには、界磁コイル29が巻回されている。このため、界磁コイル29は、ロータ15に対応する位置に配置されるとともに、空間Saに対して挿入された状態となる。すなわち、界磁コイル29とロータ15とは、ステータコイル20のコイルエンドよりも軸線Lに沿った方向の内側(ロータ15側)で対向している。換言すれば、軸線Lに沿った方向において界磁コイル29のロータ15側の端部(コイルエンド)は、ステータコイル20のコイルエンドよりもロータ15側に位置している。
【0052】
したがって、本実施形態によれば、第1の実施形態の効果(1)〜(12)に加えて、以下のような効果を得ることができる。
(13)界磁極コア27の各腕部27bには、ロータ15(空間Sa)に対応する位置においてロータ15側へ近接するように近接部Kが形成されるとともに、当該近接部Kに界磁コイル29が巻回されている。このため、ロータ15に対応する位置(領域)、すなわち、ステータに形成されるステータコイル20が存在しない空間Saを利用して界磁コイル29を配置できる。このため、各界磁コイル29がシャフト12の軸線Lに沿った方向のうちロータ15の反対側(モータ11の外側)に突出することを抑制し、モータ11の小型化を図ることができる。
【0053】
(14)また、各腕部27bは、シャフト12とバイパスコア22とを磁気的に連結するように延在する鋼板を複数枚、積層して形成されている。このため、本実施形態では、同一形状の鋼板を積層するだけで近接部Kを含む腕部27bの全体を簡便に形成することができる。
【0054】
なお、本実施形態は以下のように変更してもよい。
○ 上記第2の実施形態において、各腕部27bを形成する鋼板の積層方向は適宜変更してもよい。ただし、第2の実施形態のように、腕部27bを簡便に形成する観点からは、鋼板の積層方向を各腕部27bが伸びる方向と直交し、且つ軸線Lに直交する方向とするのが好ましい。
【0055】
○ 上記第2の実施形態において、固定部27a、及び各腕部27bを一体に形成してもよい。同様に、上記第1の実施形態において、固定部27a、及び各腕部27bを別体に形成してもよい。
【0056】
○ 上記各実施形態において、固定部27aを省略してもよい。すなわち、各腕部27bのシャフト12側の端面がシャフト12の外周面と向かい合うように固定されておればよい。この場合、各腕部27bのシャフト12側の基端面がギャップ面27gとなる。本別例では、各腕部27bが界磁極コア27をなす。
【0057】
○ 上記各実施形態において、界磁極コア27の腕部27bの本数を適宜変更してもよい。
○ 上記各実施形態において、界磁極コア27の各腕部27bを異なる形状としてもよい。以下、図5にしたがって具体的に説明する。なお、図5は、シャフト12の端面を正面にして見た状態を示すとともに、ハウジング部材14a、ロータ15(ロータティース16)、ステータコア18(ステータティース19)、ステータコイル20の図示を省略した模式図とされている。例えば、図5(a)に示すように、各腕部27bは、軸線Lと交差しない方向に向かって延びるように形成してもよい。また、図5(b)に示すように、各腕部27bは、屈曲していてもよい。また、図5(c)に示すように、各腕部27bは、ステータ17のバイパスコア22側で複数に分岐していてもよく、また逆に固定部27a(シャフト12)側で複数に分岐していてもよい。すなわち、各腕部27bは、軸線Lに沿った方向と交差する方向に延びるように形成されておればよい。より具体的に言えば、各腕部27bは、シャフト12の端面側から見て各腕部27bの中心線の全部、又は一部がシャフト12の軸線に沿った方向と交差しておればよく、中心線が軸線Lと交差していなくてもよい。また、各腕部27bは、シャフト12とステータ17のバイパスコア22とを磁気的に連結しておればどのような形状に形成してもよい。
【0058】
○ 上記各実施形態において、図5(d)に示すように、軸線Lに直交する方向の外側に位置する各腕部27bの先端部(外側端)を相互に連結する円環状の連結部27cを設けてもよい。このように形成しても、固定部27a、各腕部27b、及び連結部27cによって、空間Sbを形成することができる。
【0059】
○ 上記各実施形態において、各腕部27bは、シャフト12(固定部27a)側、又はステータ17側において、軸線Lに沿った方向のうちモータ11の外側に向かって突出するように傾斜させてもよい。
【0060】
○ 上記各実施形態において、バイパスコア22の凹部22aを省略してもよい。この場合には、各腕部27bの先端部(外側端)がバイパスコア22の先端面に接触するように界磁極26をステータ17に組み付ければよい。
【0061】
○ 上記各実施形態において、界磁コイル29は、各腕部27bに形成されておればよく、ステータ17側、あるいは腕部27bの全体にわたって形成されていてもよい。また、各界磁コイル29は、ロータ15に対応しない位置に形成されていてもよく、また空間Saの外に配設されていてもよい。ただし、モータ11を小型化する観点からは、上記各実施形態のように構成するのが好ましい。
【0062】
○ 上記各実施形態において、主電動機部25(シャフト12)の片方側にのみ界磁極26を設けてもよい。このように構成しても、界磁コイル29に通電することによって、シャフト12、ロータ15のロータティース16、バイパスコア22、及び界磁極コア27(各腕部27b)を順に通過して、再びシャフト12に入るように環状の磁路(界磁磁束の流れ)を形成することができる。ただし、界磁極26を片側だけ設ける構成とした場合には、発生させた界磁磁束の一部がロータ15(ロータティース16)へ入ることなくシャフト12を通ってしまう可能性があるため、上記各実施形態のように構成することが好ましい。
【0063】
○ 上記各実施形態において、ロータ15のロータティース16の数は、適宜変更してもよい。また、ステータ17のステータティース19の数は、適宜変更してもよい。すなわち、モータ11は、10極12スロットに構成することに限られず、20極24スロットなど異なる構成としてもよい。
【0064】
○ 上記実施形態において、分布巻により各ステータコイル20を形成してもよい。
○ 上記各実施形態において、シャフト12の磁路形成部位に別に軟磁性材料を配設してもよい。具体的に言えば、シャフト12において、対をなす界磁極26の各ギャップ面27gと対応する位置の間の全周に亘って軟磁性材料からなる円環状のシャフトバイパスコアを配設する。この場合、シャフトバイパスコアは、シャフト12の基部よりも渦電流損の少ない材質を用いるとよい。このように構成することで、ロータ15に形成されたロータティース16迄の磁路(界磁磁束の流れ)を形成し易くできる。したがって、ロータティース16における界磁磁束量を向上させ、より大きなトルクを得ることができる。なお、この場合、シャフト12の基部は、非磁性材料で形成してもよい。
【0065】
○ 上記各実施形態において、各ロータティース16の形状は適宜変更してもよい。すなわち、各ロータティース16がロータ15の直径方向へ磁束を通し易い凸極部として機能すればよい。
【0066】
○ 上記各実施形態において、バイパスコア22の形状は適宜変更してもよい。すなわち、バイパスコア22は、ロータ15のロータティース16から受け入れた界磁磁束を各腕部27bへ誘導可能であればよい。
【0067】
○ 上記実施形態において、各ロータティース16間に非磁性材料からなるスペーサを配設するようにしてもよい。
○ 上記実施形態において、モータ11は、アウターロータ型のモータとして具体化してもよい。具体的に言えば、図6に示すように、シャフト12には、軟磁性材料からなる有底筒状のアウターロータ本体(第1磁性体)30aがシャフト12と一体に回転可能に固着されている。アウターロータ本体30aの内周面には、複数のロータティース(凸極部)16が形成されている。アウターロータ本体30a、及びロータティース16は、アウターロータ30をなす。また、アウターロータ30の内側には、ステータ31が配設されている。ステータ31において、軟磁性材料からなる円筒状の鉄心(第2磁性体)32の外周面には、複数のステータティース19が形成されているとともに、各ステータティース19には、ステータコイル20が形成されている。また、鉄心32の内側には、シャフト12がベアリング13を介して軸線Lまわりで回転可能に支持されている。また、鉄心32外周面には、ステータティース19よりもアウターロータ本体30aの底部側に、鉄心32から外側へ向けて放射状に延びる複数本の腕部(第3磁性体)27bが形成されている。本別例では、各腕部27bが界磁極コア27をなす。各腕部27bには、それぞれ界磁コイル29が形成されているとともに、アウターロータ本体30aの内周面において腕部27bに対応する位置には、内側に帯状に突出する円環状の突出部33が形成されている。各腕部27b、及び突出部33は、複数枚の鋼板を積層して形成されている。このように構成しても、各界磁コイル29に電流を流すことにより発生した磁束が各腕部27b、突出部33、アウターロータ本体30a、ロータティース16、ステータティース19、及び鉄心32の順に通過し、再び各腕部27bへ入るように、環状の磁路(界磁磁束の流れ)を形成することができる(矢印Ya〜Ycに示す)。なお、この場合、各腕部27b及び突出部33は、ステータティース19よりもアウターロータ本体30aの開口部側に設けてもよい。
【0068】
以下、上記各実施形態、及び別例(変形例)から把握できる技術的思想を追記する。
(イ)前記複数の第3磁性体は、それぞれ前記シャフトの軸線に沿った方向と交差する方向に延びるように形成された請求項1に記載の回転電動機。
【0069】
(ロ)第1磁性体を含むシャフトと、軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、前記第1磁性体と前記第2磁性体とを磁気的に連結する第3磁性体、及び界磁コイルを含む界磁極と、を備え、前記界磁コイルに通電した際に前記第1磁性体、前記凸極部、前記第2磁性体、及び前記第3磁性体によって磁路が形成され、前記第3磁性体のギャップ面は、前記シャフトの外周面に向かうように形成された回転電動機(以下、技術的思想ロと示す)。
【0070】
技術的思想ロによれば、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトの第1磁性体へ入るように磁路が形成され易い。したがって、凸極部における界磁磁束量が減少することを抑制し、より大きなトルクを得ることができる。前述した特開2008−43099号公報(特許文献1)、及び特開2009−273231号公報(特許文献2)では、界磁極コアのギャップ面がシャフト12の外周面に向かうように構成されていない。技術的思想ロによれば、特許文献1,2の構成と比較して、第2磁性体を通過した界磁磁束が第3磁性体を通過して再びシャフトへ入るように磁路が形成され易くできる。なお、技術的思想ロにおける「第3磁性体」は、上記各実施形態のように複数の腕部27bとして形成することに限られず、円盤状に形成することも含む。
【符号の説明】
【0071】
11…モータ(回転電動機)、12…シャフト(第1磁性体)、15…ロータ、16…ロータティース(凸極部)、17,31…ステータ、20…ステータコイル(電機子コイル)、22…バイパスコア(第2磁性体)、26…界磁極、27…界磁極コア、27a…固定部、27b…腕部(第3磁性体)、27g…ギャップ面、29…界磁コイル、30…アウターロータ、30a…アウターロータ本体(第1磁性体)、32…鉄心(第2磁性体)、K…近接部、L…軸線、Sb…空間。
【特許請求の範囲】
【請求項1】
第1磁性体を含むシャフトと、
軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、
前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、
前記第1磁性体と前記第2磁性体とを磁気的に連結するとともに界磁コイルが巻回され、当該界磁コイルに通電した際に前記第1磁性体、前記凸極部、及び前記第2磁性体とともに磁路を形成する複数の第3磁性体を含む界磁極と、を備え、
前記複数の第3磁性体は、各第3磁性体の間に空間を形成するように配置された回転電動機。
【請求項2】
前記複数の第3磁性体は、前記シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされた請求項1に記載の回転電動機。
【請求項3】
前記ステータにおいて前記ロータとの対向面側には、複数の電機子コイルが形成されており、
各第3磁性体には、前記ロータに対応する位置において前記シャフトの軸線方向のうち前記ロータ側へ近接するように近接部が形成され、前記界磁コイルは、前記近接部に巻回された請求項1又は請求項2に記載の回転電動機。
【請求項4】
前記各第3磁性体は、前記第1磁性体と前記第2磁性体とを磁気的に連結するように延在する鋼板を複数枚、積層して形成された請求項3に記載の回転電動機。
【請求項5】
前記各第3磁性体は、前記シャフトの外周面と向かい合うギャップ面を介して前記シャフトの第1磁性体と磁気的に連結された請求項1〜請求項4のうち何れか一項に記載の回転電動機。
【請求項6】
前記界磁極は、前記シャフトの両端側に対をなすように配設されており、
各界磁コイルには、各界磁極からの前記磁路が相対向する方向に形成されるように電流が流される請求項1〜請求項5のうち何れか一項に記載の回転電動機。
【請求項1】
第1磁性体を含むシャフトと、
軟磁性体からなるとともに凸極部を有し前記シャフトに固定されるロータと、
前記シャフトの軸線方向に沿って延びる第2磁性体を含むステータと、
前記第1磁性体と前記第2磁性体とを磁気的に連結するとともに界磁コイルが巻回され、当該界磁コイルに通電した際に前記第1磁性体、前記凸極部、及び前記第2磁性体とともに磁路を形成する複数の第3磁性体を含む界磁極と、を備え、
前記複数の第3磁性体は、各第3磁性体の間に空間を形成するように配置された回転電動機。
【請求項2】
前記複数の第3磁性体は、前記シャフトから外側へ向けて放射状に延びるように形成されるとともに、各第3磁性体の外側端は開放状態とされた請求項1に記載の回転電動機。
【請求項3】
前記ステータにおいて前記ロータとの対向面側には、複数の電機子コイルが形成されており、
各第3磁性体には、前記ロータに対応する位置において前記シャフトの軸線方向のうち前記ロータ側へ近接するように近接部が形成され、前記界磁コイルは、前記近接部に巻回された請求項1又は請求項2に記載の回転電動機。
【請求項4】
前記各第3磁性体は、前記第1磁性体と前記第2磁性体とを磁気的に連結するように延在する鋼板を複数枚、積層して形成された請求項3に記載の回転電動機。
【請求項5】
前記各第3磁性体は、前記シャフトの外周面と向かい合うギャップ面を介して前記シャフトの第1磁性体と磁気的に連結された請求項1〜請求項4のうち何れか一項に記載の回転電動機。
【請求項6】
前記界磁極は、前記シャフトの両端側に対をなすように配設されており、
各界磁コイルには、各界磁極からの前記磁路が相対向する方向に形成されるように電流が流される請求項1〜請求項5のうち何れか一項に記載の回転電動機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−182941(P2012−182941A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−45310(P2011−45310)
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]