
回転電機システム制御装置
【課題】回転電機の冷却システムにおいて発生した異常の種類を適切に判断できる回転電機システム制御装置を提供する。
【解決手段】回転電機16及びインバータ18を冷却する冷却システムは、冷却液の循環路10、循環路10に冷却液を循環させるウォータポンプ12、及びラジエータ14を備える。回転電機システム制御装置であるECU20は、循環路10においてインバータ18への冷却液の入口付近に設けられた液温センサから取得した冷却液温TWと、ウォータポンプ12の実回転数Rと、に基づいて、冷却システムにおいて発生した異常の種類を判断する。
【解決手段】回転電機16及びインバータ18を冷却する冷却システムは、冷却液の循環路10、循環路10に冷却液を循環させるウォータポンプ12、及びラジエータ14を備える。回転電機システム制御装置であるECU20は、循環路10においてインバータ18への冷却液の入口付近に設けられた液温センサから取得した冷却液温TWと、ウォータポンプ12の実回転数Rと、に基づいて、冷却システムにおいて発生した異常の種類を判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、冷却媒体を用いる回転電機の回転電機システム制御装置に関する。
【背景技術】
【0002】
ハイブリッド自動車及び電気自動車など、駆動源として回転電機を用いる車両には、回転電機及び回転電機を駆動するインバータなどの駆動装置の過熱を防ぐため、通常、回転電機及び回転電機の駆動装置を冷却する冷却システムが搭載される。一般的な冷却システムは、冷却水の循環路、冷却水を循環路に循環させるポンプ、及び冷却水を冷却するラジエータを備える。
【0003】
従来技術において、回転電機などの過熱による故障を防止するために、回転電機の運転温度などに基づいて回転電機の出力を制限する制御が行われることがある。例えば、特許文献1には、駆動モータ及びインバータを備える駆動システムと、この駆動システムを冷却する冷却装置と、を備える車両駆動システムにおいて、インバータの温度と冷却装置のラジエータによって冷却された冷却水の温度との差に基づいて駆動モータの出力を制限する技術が開示されている。特許文献1に記載の技術において、インバータの温度と冷却水の温度との差が小さい場合は、冷却装置の冷却能力が低いと判断され、駆動モータの出力が制限される。
【0004】
また、冷却システムにおける異常の発生の有無を判定する技術がある。例えば、冷却システム内の冷却水の温度を検出し、検出した温度が所定の閾値を超えている場合に冷却システムにおいて異常が発生していると判定する従来技術がある。また例えば、特許文献2には、電子機器に搭載される冷却装置において、液体冷媒を循環経路に循環させるポンプの回転数が所定の閾値を超えた場合に、冷却装置内の液体冷媒の液量が不足していると判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−149064号公報
【特許文献2】特開2006−250395号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術では、冷却水の温度を用いて求められる冷却装置の冷却能力に応じて駆動モータの出力を制限するだけで、冷却装置における異常の発生を検出することはない。したがって、特許文献1に記載の車両駆動システムにおいては、冷却装置に何らかの異常が発生して冷却水の温度が高温となった場合であっても、発生した異常に対処するための処理が行われることはない。
【0007】
また、冷却システムにおいて冷却水の温度に基づいて異常の発生の有無を判定する従来技術や、特許文献2に記載の技術のような、液体冷媒を循環させるポンプの回転数に基づいて液体冷媒の液量の不足を判断する技術では、冷却システムにおける異常発生の有無は判定できるが、冷却システム中のどの部分にどのような異常が発生したかを判断することは困難である。
【0008】
以下の手段は、上記課題の少なくとも1つを解決することに貢献する。
【課題を解決するための手段】
【0009】
本発明に係る回転電機システム制御装置は、回転電機と、前記回転電機の駆動装置と、前記回転電機及び前記駆動装置を冷却する冷却液の循環路と、前記冷却液を前記循環路に循環させるウォータポンプと、を含む回転電機システムを制御する回転電機システム制御装置であって、前記冷却液の循環路に設けられた温度センサから取得した前記冷却液の液温と、前記ウォータポンプの回転数とに応じて、前記駆動装置及び前記ウォータポンプを制御する制御部を備え、前記制御部は、前記冷却液の液温が予め設定された閾値以上であるときに、前記ウォータポンプの回転数が前記ウォータポンプの定常運転時の回転数として予め設定された定常範囲内の値であるか、前記定常範囲の外にあるかを分類し、前記定常範囲内の場合に、前記回転電機の出力トルクが前記冷却液の液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする。
【0010】
本発明の他の1つの態様の回転電機システム制御装置において、前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、前記制御部は、さらに、前記ウォータポンプの回転数が、前記定常範囲の外である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0011】
また、本発明の他の1つの態様の回転電機システム制御装置において、前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、前記制御部は、さらに、前記ウォータポンプの回転数が、前記定常範囲の外であって、前記定常範囲よりも大きい値として予め定めた上限値と下限値との間の上下限範囲内である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0012】
このように、前記駆動装置に含まれる複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて前記回転電機の出力トルクを制限する態様では、前記複数の回路素子のうち最も負荷の高いと考えられる回路素子に合わせた制御が行われるので、前記駆動装置を適切に保護することができる。
【0013】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が、前記上限値以上の値として予め定めた第2の閾値より大きい場合に、前記ウォータポンプを停止させる制御を行うことが好ましい。
【0014】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が、0よりも大きく、かつ前記下限値よりも小さい値として予め設定された第3の閾値以下である場合に、前記ウォータポンプの回転数を現在の回転数より大きくする制御を行うことが好ましい。
【0015】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が0である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0016】
また、本発明に係る回転電機システム制御装置において、前記制御部は、以上で示した本発明の複数の態様において行う制御を組み合わせて行ってもよい。
【発明の効果】
【0017】
本発明によると、冷却システムにおいて発生した異常の種類に応じて、回転電機システムにおける適切なフェールセーフ処理を行うことができる回転電機システム制御装置を提供できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態における回転電機システム制御装置を備える回転電機システムのブロック図である。
【図2】図1のインバータ18の構成の詳細の例を示す図である。
【図3】本発明の実施形態において行われる異常判断処理の手順の例を示すフローチャートである。
【図4】本発明の実施形態において行われる異常モード判断処理及びフェールセーフ処理の内容の例を示す表である。
【図5】冷却液の温度に対する回転電機の許容トルク電流の例を示す図である。
【図6】回路素子に流れる電流に対する素子温度上昇度の例を示す図である。
【発明を実施するための形態】
【0019】
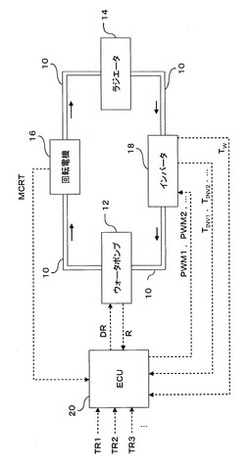
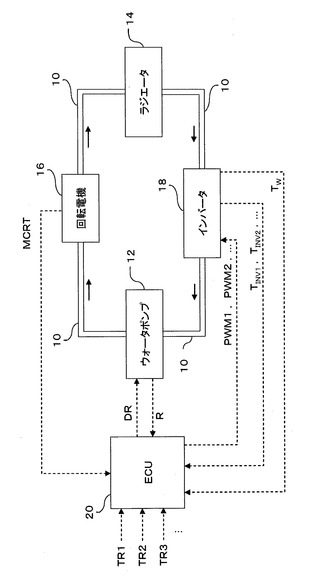
図1は、回転電機システム制御装置を備える回転電機システムの概略の例を示すブロック図である。図1に示す回転電機システムは、回転電機16と、インバータ18と、回転電機16及びインバータ18を冷却する冷却システムと、を備える。図1に示す回転電機システムが備える冷却システムは、冷却液の循環路10、ウォータポンプ12、及びラジエータ14を含む。
【0020】
ECU(Electronic Control Unit)20は、車両に搭載され、後述するように各センサの情報を基に回転電機システム及び冷却システムなどの動作を制御する制御部で、回転電機システム制御装置である。ECU20はマイクロコンピュータなどを用いて実現できる。ECU20の機能の一部が、本発明の1つの実施形態の回転電機システム制御装置又は冷却システム制御装置として機能する。
【0021】
回転電機16は、例えば、ハイブリッド自動車(HV, Hybrid Vehicle)又は電気自動車(EV, Electric Vehicle)の駆動用モータである。また、回転電機16は、ハイブリッド自動車のエンジンに連結され、エンジンの回転力によって発電する発電機又はエンジンの始動を行うことのできる電動機として機能するモータであってもよい。なお、図1では省略して図示しているが、回転電機システムは複数の回転電機16を備えることがある。例えば、ハイブリッド自動車に搭載される回転電機システムは、車両の駆動用モータと、エンジンの動力を受けて発電又はエンジンの始動を行うモータと、を備える。
【0022】
インバータ18は、回転電機16の駆動装置の一部を構成する。インバータ18は、ECU20からの制御信号PWMに従って、図示しない直流電源から供給された直流電圧を交流電圧に変換して回転電機16を駆動する。インバータ18は、複数のモジュール部品を組み合わせて1つの集合部品(ASSY)として構成されることがある。例えば、インバータ18は、回転電機16を駆動する機能を有するインバータモジュールと、図示しない直流電源の電圧レベルの変換を行うコンバータモジュールと、を含むものであってよい。また例えば、回転電機システムが複数の回転電機16を備える場合、インバータ18は、各回転電機16を駆動するインバータモジュールを含んで構成される。
【0023】
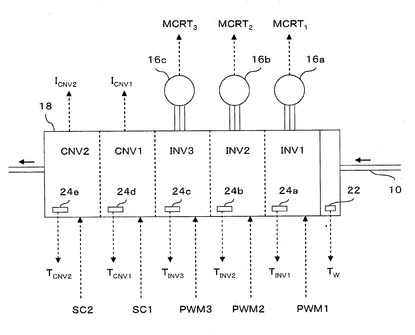
図2に、回転電機システムが3つの回転電機16a,16b,16cを備える場合のインバータ18の例を示す。図2において、例えば、回転電機16aは車両の前輪を駆動する駆動用モータ、回転電機16bは車両の後輪を駆動する駆動用モータ、及び回転電機16cは図示しないエンジンと動力のやり取りをすることで発電又はエンジンの始動を行うモータである。図2を参照すると、インバータ18は、回転電機16a,16b,16cをそれぞれ駆動するインバータモジュールINV1,INV2,INV3を含む。インバータモジュールINV1,INV2,INV3は、それぞれ、ECU20からの制御信号PWM1,PWM2,PWM3に従って各回転電機16a,16b,16cを駆動する。
【0024】
また、図2において、インバータ18は、コンバータモジュールCNV1,CNV2を含む。コンバータモジュールCNV1,CNV2は、例えば、図示しない直流電源からの供給電圧の電圧レベルを変換し、インバータモジュールINV1,INV2,INV3や図示しない補機バッテリなどの負荷に供給したり、回転電機16で発電された電力を直流電源に回生する降圧回路として機能したりする。コンバータモジュールCNV1,CNV2は、それぞれ、ECU20からの制御信号SC1,SC2に従って作動する。回転電機システムが備える回転電機16の個数など、回転電機システムの特性に応じてインバータ18に含まれるモジュールの数は増減される。
【0025】
再び図1を参照し、ウォータポンプ12は、循環路10に冷却液を循環させるポンプである。ウォータポンプ12は、ECU20からの回転数指令値DRに従って回転する。ラジエータ14は、循環路10を通る冷却液の熱を放出させて冷却液を冷却する熱交換装置である。図1を参照すると、冷却システムの循環路10内の冷却液は、実線矢印の方向に従って、ウォータポンプ12、回転電機16、ラジエータ14、及びインバータ18の順に流れる。
【0026】
以下、図1及び図2を参照して説明した回転電機システムの制御において、ECU20が行う処理について説明する。
【0027】
ECU20は、回転電機16a,16b,16cそれぞれの出力トルクを指定するトルク指令値TR1,TR2,TR3を外部ECUなどから取得する。またECU20は、各回転電機16a,16b,16cに設けられた図示しない電流センサから、各回転電機16a,16b,16cを流れる電流MCRT1,MCRT2,MCRT3を取得し、各コンバータモジュールCNV1,CNV2に設けられた図示しない電流センサから、各コンバータモジュールCNV1,CNV2に流れる電流ICNV1,ICNV2を取得する。
【0028】
また、図2を参照すると、インバータ18の各モジュールINV1,INV2,INV3,CNV1,CNV2には、各モジュール内の回路素子の温度を検出する素子温度センサ24a,24b,24c,24d,24eが設けられる。ECU20は、素子温度センサ24a,24b,24c,24d,24eがそれぞれ検出した各モジュール内の回路素子の温度TINV1,TINV2,TINV3,TCNV1,TCNV2を取得する。
【0029】
さらに、冷却液の循環路10において、インバータ18への冷却液の入口付近に、インバータ18を通る冷却液の温度を検出する液温センサ22が設けられる(図2)。液温センサ22は、インバータ18の各モジュールが発生する熱による影響を受けにくい部分に設けられる。液温センサ22は、循環路10において、インバータ18付近でなく、例えばラジエータ14からの冷却液の出口付近に設けてもよい。ECU20は、液温センサ22が検出した冷却液温TWを取得する。
【0030】
ECU20は、回転電機システムに設けられた各種センサなどから取得した上述の信号に基づいて、インバータ18の各モジュールを制御する制御信号PWM1、PWM2,PWM3,SC1,SC2を生成し、生成した信号をインバータ18に送信する。インバータ18の各モジュールは、ECU20から受信した制御信号に従って作動する。
【0031】
また、ECU20は、ウォータポンプ12に対して、回転数指令値DRを送信する。回転数指令値DRは、通常、予め設定された一定の値である。ECU20は、冷却液の温度を検出する液温センサ22が検出した冷却液温TWに応じた回転数指令値DRを送信するようにしてもよい。例えば、冷却液の温度範囲を低温、中温、及び高温の3つの範囲に分けて、各温度範囲に対応する回転数指令値DRを予め設定しておき、検出された冷却液温TWの入る温度範囲に対応して設定された回転数指令値DRをウォータポンプ12に送信するようにしてもよい。
【0032】
また、ECU20は、ウォータポンプ12からウォータポンプ12の実回転数Rを取得し、取得した実回転数Rに基づいて冷却システムについての異常判断処理を行う。以下、図3を参照し、ECU20が行う異常判断処理について説明する。
【0033】
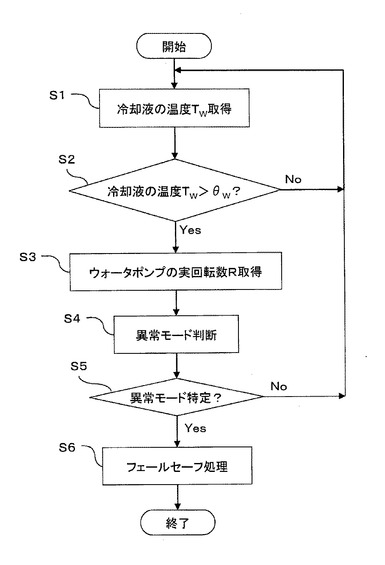
図3は、ECU20が行う異常判断処理の手順の例を示すフローチャートである。
【0034】
車両の作動が開始されると、ECU20は、図3に示す処理を開始する。図3を参照すると、まずステップS1で、ECU20は、液温センサ22が検出した冷却液温TWを取得する。次に、ステップS2で、ECU20は、取得した冷却液温TWが、予め設定された閾値θWを超えているか否かを判定する。冷却液温TWが閾値θWを超えていれば、処理はステップS3へ進み、超えていなければ、処理はステップS1に戻る。
【0035】
ステップS2で用いられる閾値θWは、冷却システム内の冷却液の温度が正常であるか否かを判定するための閾値である。閾値θWは、例えば回転電機システムを搭載する車両が使用される環境での外気温に基づいて決定される。例えば、外気温の最高温度が約40℃であると考えられる地域で使用される車両に回転電機システムが搭載される場合、閾値θWを65℃に設定し、外気温の最高温度が約50℃であると考えられる地域で使用される車両に回転電機システムが搭載される場合は75℃に設定してもよい。外気温に基づいて決定された冷却液温の閾値に、液温センサ22の検出誤差(例えば、10℃)を加算した値を閾値θWとして用いてもよい。
【0036】
ステップS3で、ECU20は、ウォータポンプ12の実回転数Rを取得する。次に、ステップS4で、ECU20は、ステップS3で取得した実回転数Rに基づいて、冷却システムにおいて発生した異常の異常モードを判断する。
【0037】
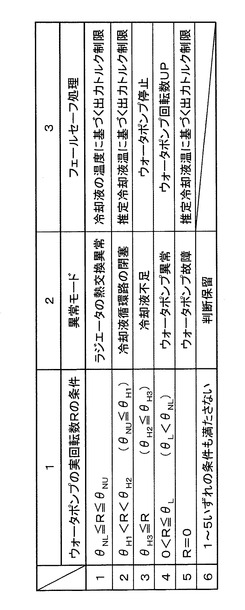
図4の表に、ステップS4で判断される異常モードの内容の例を示す。図4の表において、第1列は、ウォータポンプ12の実回転数Rについての条件を示す。図4の表の第2列は、ウォータポンプ12の実回転数Rについて、各行(1〜6)の条件が成立した場合の異常モードを示す。図4の表の第3列の内容については後に詳述する。
【0038】
以下、図4を参照し、ステップS4における異常モード判断処理について説明する。
【0039】
ウォータポンプ12の実回転数Rが、定常運転時の回転数として予め設定された定常範囲θNL≦R≦θNUの値である場合(行1)は、ステップS4で、ECU20は、冷却システムのラジエータ14に異常が発生していると判断する。ここで、定常運転時の回転数の定常範囲θNL≦R≦θNUは、回転数指令値DRに対して期待される実回転数の範囲である。例えば、定常範囲の下限値θNL=(1+0.1)DR、定常範囲の上限値θNU=(1−0.1)DRに設定される。ステップS4で実回転数Rが定常範囲内である場合、冷却システムにおいて、循環路10を冷却液が循環しているにも関わらず冷却液温が上昇している状態であると考えられるので、ラジエータ14において熱交換の異常が発生していると判断できる。例えば、ラジエータ14のファンが故障している場合がある。
【0040】
ウォータポンプ12の実回転数Rが、定常範囲より大きい値の範囲θH1<R<θH2の値である場合(行2)、ステップS4で、ECU20は、冷却システムの循環路10が閉塞していると判断する。この値の範囲は、例えば、下限値θH1=(1.2+0.1)DR、上限値θH2=(1.2−0.1)DRに設定される。また例えば、冷却システムの循環路10において人工的に作られた閉塞状態の下で回転数指令値DRに対する実回転数を測定し、この測定値を用いて下限値θH1及び上限値θH2を決定してもよい。
【0041】
ウォータポンプ12の実回転数Rが、行2の値の範囲の上限値θH2以上である閾値θH3よりも大きい場合(行3)、ステップS4で、ECU20は、冷却システムの正常動作のために十分な量の冷却液が循環路10内に存在しないと判断する。この閾値θH3は、例えば、回転数指令値DRの約1.5倍に設定される。閾値θH3は、例えば、循環路10に冷却液を充填しない状態の下で回転数指令値DRに対する実回転数Rを測定し、この測定値を用いて決定してもよい。ステップS4で実回転数Rが閾値θH3より大きい場合、例えば循環路10からの冷却液漏れなどによって循環路10内の冷却液が減少し、ウォータポンプ12が空転している状態であると考えられる。
【0042】
ウォータポンプ12の実回転数Rが、0より大きく、かつ定常範囲の下限値θNLより小さい閾値θL以下である場合(行4)、ECU20は、ステップS4で、ウォータポンプ12に関して異常が発生していると判断する。閾値θLは、例えば、回転数指令値DRの0.8倍の値に設定される。また、冷却システムにおいて、循環路10の閉塞が生じる際、循環路10が閉塞した初期の段階ではウォータポンプ12の回転数指令値DRに対する実回転数Rが一時的に低下し、その後、再び実回転数Rが上昇することが知られている。閾値θLは、この循環路10が閉塞した初期段階に得られる実回転数Rよりもさらに小さい値として設定することが望ましい。閾値θLを循環路10の閉塞の初期段階における実回転数よりも小さい値に設定しておけば、ステップS4の異常モードの判断において、ウォータポンプ12の異常発生を循環路10の閉塞と区別してより精度良く判断できる。ステップS4で、実回転数Rが0<R≦θLの範囲である場合、例えば、ウォータポンプ12のモータの軸が磨耗していて、回転数指令値DRに対して期待される実回転数が得られない状態が考えられる。また例えば、ECU20とウォータポンプ12とを接続する信号線における異常により、ECU20が送信した回転数指令値DRの信号レベルより低いレベルの信号を回転数指令値DRとしてウォータポンプ12が受信している場合など、ソフトウェア上の異常が発生している場合もある。
【0043】
ウォータポンプ12の実回転数Rが0である場合(行5)、ECU20は、ステップS4で、ウォータポンプ12が故障していると判断する。
【0044】
ウォータポンプ12の実回転数Rが行1から行5のいずれの条件も満たさない場合(行6)、ステップS4において、ECU20は異常モードの判断を保留する。例えば、実回転数Rが、図4の表の行4で用いられる閾値θLより大きく、かつ定常範囲の下限値θNLより小さい場合は、実回転数Rは、第1行から第5行のいずれの条件も満たさない。また例えば、図4の表の行2の閾値θH1を定常範囲の上限値θNUよりも大きく設定した場合であって実回転数Rが定常範囲の上限値θNUと閾値θH1との間の値である場合、及び行3の閾値θH3を行2の閾値θH2よりも大きく設定した場合であって実回転数Rが閾値θH2と閾値θH3との間の値である場合においても、実回転数Rは、行1から行5のいずれの条件も満たさない。
【0045】
ステップS4の異常モード判断処理の後、ステップS5において、異常モードが特定されたか否かを判定する。ECU20がステップS4で異常モードを特定していた場合(図4の表の行1から行5)、ステップS5において、処理はステップS6へ進む。ECU20がステップS4で異常モードの判断を保留していた場合(図4の表の行6)、ステップS5において、処理はステップS1に戻る。
【0046】
ステップS6では、ECU20は、回転電機システムについて、ウォータポンプ12の実回転数Rの条件に応じたフェールセーフ処理を行う。図4の表の第3列に、ウォータポンプ12の実回転数Rについて成立した条件に応じてステップS6で行われる処理の内容を示す。ステップS6で行われる処理は、ステップS4で判断された異常モードに適したフェールセーフ処理である。
【0047】
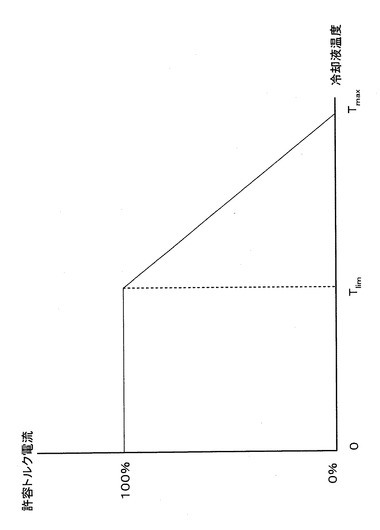
ウォータポンプ12の実回転数Rが定常範囲(θNL≦R≦θNU)の場合(行1)、ステップS6で、ECU20は、液温センサ22から取得した冷却液温TWに基づいて、回転電機16a,16b,16cの出力トルクを制限する処理を行う。ECU20は、例えば図5に示すような、冷却液の温度に対して回転電機16a,16b,16cの許容される最大のトルク電流を決定するマップを記憶装置(図示しない)に保持している。図5を参照すると、冷却液温が制限開始温度Tlim以下である場合、許容トルク電流は100%であり、冷却液温が制限開始温度Tlimを超えると、許容トルク電流は、最高温度Tmaxで0%になるように線形に低下する。
【0048】
ECU20は、図5のマップから冷却液温TWに対応する許容トルク電流を取得し、取得した許容トルク電流に応じて各回転電機16a,16b,16cに対するトルク指令値TR1,TR2,TR3に制限をかけた上で、各回転電機16a,16b,16cを制御する各制御信号PWM1,PWM2,PWM3を生成する。ECU20は、外部ECUなどから受信したトルク指令値TR1,TR2,TR3のうち、冷却液温TWに対応する許容トルク電流よりも大きいトルク指令値がある場合、そのトルク指令値として許容トルク電流の値を設定する。その後、各回転電機16a,16b,16cにおいて各トルク指令値TR1,TR2,TR3の示す出力が得られるように、各制御信号PWM1,PWM2,PWM3を生成してインバータ18の各モジュールINV1,INV2,INV3に送信する。冷却液温TWに対応する許容トルク電流が100%の場合は、ECU20は、トルク指令値の制限を行わずに、各回転電機16a,16b,16cにおいて、受信した各トルク指令値TR1,TR2,TR3の示す出力が得られるように各制御信号PWM1,PWM2,PWM3を生成する。
【0049】
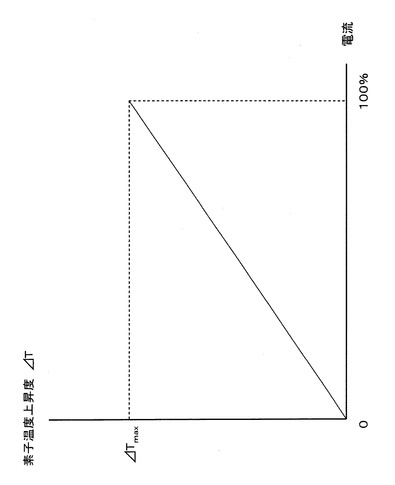
図5のマップにおいて、制限開始温度Tlim及び最高温度Tmaxは、インバータ18に含まれる回路素子の素子温度が許容される最大値を超えないように設定される。インバータ18に含まれる回路素子については、例えば図6に示すように、その回路素子に流れる電流の値に対する素子温度上昇度ΔTが知られており、ECU20は、図6に例示するような素子温度上昇度のマップを記憶装置に保持している。通常、回路素子の温度は循環路10内の冷却液温TWとほぼ等しいと考えられるため、ある電流が流れたときの素子温度上昇度ΔTと冷却液温TWとの和が、その電流が流れたときの回路素子の素子温度であると言える。したがって、回路素子に100%の電流が流れたときの素子温度上昇度をΔTmaxとし、ΔTmaxと冷却液温Twとの和がその回路素子の温度の許容最大値と等しくなるような冷却液温TWを、制限開始温度Tlimとして設定すればよい。そうすると、冷却液温Twが制限開始温度Tlim以下である間は、回路素子に100%の電流を流してもその回路素子の温度は許容最大値を超えない。さらに、許容トルク電流を0%とする最高温度Tmax=Tlim+ΔTmaxと設定すると、冷却液温TWが回路素子の温度の許容最大値に達した場合は、その回路素子に流れる電流は0、すなわち素子温度上昇度ΔT=0となり、回路素子の温度はその許容最大値を超えない。
【0050】
再び図4を参照し、ウォータポンプ12の実回転数RがθH1<R<θH2である場合(行2)、ステップS6で、ECU20は、インバータ18の各モジュールに設けられた素子温度センサ24a〜24eを用いて、循環路10において各モジュールに最も近い部分を通る冷却液の推定液温を算出し、算出した推定液温に基づいて回転電機16a,16b,16cの出力トルクを制限する処理を行う。
【0051】
まず、インバータ18の各モジュールに設けられた温度センサ24a〜24eの検出温度と、インバータ18の各モジュールによる電流値MCRT1,MCRT2,MCRT3,ICNV1,ICNV2と、に基づいて、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の推定液温が算出される。ECU20は、電流センサから取得した電流値MCRT1,MCRT2,MCRT3,ICNV1,ICNV2を、インバータ18の各モジュールINV1,INV2,INV3,CNV1、CNV2の回路素子に流れる電流値として、例えば図6のようなマップから、各電流値に対応する各回路素子の素子温度上昇度ΔTを求める。次に、素子温度センサ24a〜24eの検出温度TINV1,TINV2,TINV3,TCNV1,TCNV2から、各素子について求めた素子温度上昇度ΔTを減算した値を、循環路10において各モジュールに最も近い部分を通る冷却液の推定液温とする。その後、求めた推定液温のうち最も高い推定液温に対応する許容トルク電流を図5のマップから求める。ECU20は、最高推定液温に対応する許容トルク電流に応じて、図4の表の行1の場合に関して説明した出力トルク制限処理と同様の処理を行い、回転電機16a,16b,16cの出力トルクを制限する。
【0052】
図4の表の行2の場合(θH1<R<θH2)、循環路10が閉塞していると考えられるため、循環路10の冷却液の流れが止まった状態であると考えられる。この状態では、例えばインバータ18の一部のモジュールが動作していて他のモジュールが動作していない場合、循環路10において、動作しているモジュールに最も近い部分を通る冷却液の温度が、動作していないモジュールに最も近い部分を通る冷却液の温度と比較して高くなると考えられる。したがって、上記で説明した処理のように、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の推定液温を用いて回転電機16a,16b,16cの出力トルク制限処理を行うと、適切にインバータ18及び回転電機16a,16b,16cを保護することができる。
【0053】
なお、循環路10内で冷却液が正常に流れている場合は、循環路10内の冷却液の流れが止まっている場合と比較して、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の温度の間に生じる差は小さい。したがって、ウォータポンプ12の実回転数Rが定常範囲内である場合(行1)は、上述のように液温センサ22が検出した冷却液温TWに基づいて回転電機16a,16b,16cの出力トルク制限処理が行われる。
【0054】
ウォータポンプ12の実回転数Rが閾値θH3よりも大きい場合(行3)、ステップS6で、ECU20は、ウォータポンプ12を停止させる制御を行う。例えば、回転数指令値DR=0とする制御信号をウォータポンプ12に送信する。ウォータポンプ12を停止させることで、ウォータポンプ12の過熱が防止される。
【0055】
ウォータポンプ12の実回転数Rが0より大きく、かつ閾値θL以下である場合(行4)、ステップS6で、ECU20は、ウォータポンプ12の回転数を現在の回転数より大きくする制御を行う。例えば、ECU20は、現在よりも大きい値の回転数指令値DRをウォータポンプ12に対して送信する。ウォータポンプ12の回転数を上げることで冷却システムの循環路10の冷却液流量を定常値に近づけることができる。
【0056】
ウォータポンプ12の実回転数Rが0である場合(行5)、図4の表の行2の場合のフェールセーフ処理と同様に、ステップS6で、ECU20は、インバータ18の各モジュールに設けられた素子温度センサ24a〜24eを用いて算出した推定冷却液温に基づいて、回転電機16a,16b,16cの出力トルクを制限する処理を行う。ウォータポンプ12の実回転数Rが0である場合の冷却システムの状態は、循環路10内を冷却液が流れていないという点では行2の場合の冷却システムの状態と同様であるため、行2の場合と同様のフェールセーフ処理を行う。
【0057】
各場合のフェールセーフ処理(図3のステップS6)において、ECU20は、特定した異常モードを図示しない表示装置に表示させる処理を行ってもよい。また、ステップS4で異常モードの判断を保留した場合、ステップS5における判定の後ステップS1の処理を実行する前に、ECU20は、冷却システムにおける異常発生を図示しない表示装置に表示させる処理を行ってもよい。
【0058】
以上で説明した実施形態では、ステップS6のフェールセーフ処理において、ウォータポンプ12の実回転数Rが定常範囲内の場合は液温センサ22が検出した冷却液温TWに基づいて回転電機の出力トルク制限処理を行い、実回転数RがθH1<R<θH2の場合及びR=0の場合は素子温度センサ24a〜24eの検出温度を用いて算出した推定冷却液温に基づいて回転電機の出力トルク制限処理を行う。他の実施形態では、実回転数Rが定常範囲内である場合も、θH1<R<θH2の場合及びR=0の場合と同様に、素子温度センサ24a〜24eの検出温度を用いて算出した推定液温に基づいて回転電機の出力トルク制限処理を行ってもよい。
【0059】
また、以上で説明した実施形態では、素子温度センサ24a〜24eの検出温度を用いて算出した推定液温に基づいた回転電機の出力トルク制限処理において、算出された推定液温のうち最大の推定液温を用いて、回転電機システムが備えるすべての回転電機16a,16b,16cの許容トルク電流を一律に決定する。他の実施形態では、各回転電機16a,16b,16cを制御する各インバータモジュールINV1,INV2,INV3に設けられた各素子温度センサ24a,24b,24cに基づいて、回転電機16a,16b,16cのそれぞれについて許容トルク電流を決定し、決定した許容トルク電流に従ってそれぞれの回転電機16a,16b,16cの出力トルクを制限してもよい。
【符号の説明】
【0060】
10 循環路、12 ウォータポンプ、14 ラジエータ、16a,16b,16c 回転電機、18 インバータ、20 ECU、22 液温センサ、24a,24b,24c,24d,24e 素子温度センサ。
【技術分野】
【0001】
本発明は、冷却媒体を用いる回転電機の回転電機システム制御装置に関する。
【背景技術】
【0002】
ハイブリッド自動車及び電気自動車など、駆動源として回転電機を用いる車両には、回転電機及び回転電機を駆動するインバータなどの駆動装置の過熱を防ぐため、通常、回転電機及び回転電機の駆動装置を冷却する冷却システムが搭載される。一般的な冷却システムは、冷却水の循環路、冷却水を循環路に循環させるポンプ、及び冷却水を冷却するラジエータを備える。
【0003】
従来技術において、回転電機などの過熱による故障を防止するために、回転電機の運転温度などに基づいて回転電機の出力を制限する制御が行われることがある。例えば、特許文献1には、駆動モータ及びインバータを備える駆動システムと、この駆動システムを冷却する冷却装置と、を備える車両駆動システムにおいて、インバータの温度と冷却装置のラジエータによって冷却された冷却水の温度との差に基づいて駆動モータの出力を制限する技術が開示されている。特許文献1に記載の技術において、インバータの温度と冷却水の温度との差が小さい場合は、冷却装置の冷却能力が低いと判断され、駆動モータの出力が制限される。
【0004】
また、冷却システムにおける異常の発生の有無を判定する技術がある。例えば、冷却システム内の冷却水の温度を検出し、検出した温度が所定の閾値を超えている場合に冷却システムにおいて異常が発生していると判定する従来技術がある。また例えば、特許文献2には、電子機器に搭載される冷却装置において、液体冷媒を循環経路に循環させるポンプの回転数が所定の閾値を超えた場合に、冷却装置内の液体冷媒の液量が不足していると判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−149064号公報
【特許文献2】特開2006−250395号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の技術では、冷却水の温度を用いて求められる冷却装置の冷却能力に応じて駆動モータの出力を制限するだけで、冷却装置における異常の発生を検出することはない。したがって、特許文献1に記載の車両駆動システムにおいては、冷却装置に何らかの異常が発生して冷却水の温度が高温となった場合であっても、発生した異常に対処するための処理が行われることはない。
【0007】
また、冷却システムにおいて冷却水の温度に基づいて異常の発生の有無を判定する従来技術や、特許文献2に記載の技術のような、液体冷媒を循環させるポンプの回転数に基づいて液体冷媒の液量の不足を判断する技術では、冷却システムにおける異常発生の有無は判定できるが、冷却システム中のどの部分にどのような異常が発生したかを判断することは困難である。
【0008】
以下の手段は、上記課題の少なくとも1つを解決することに貢献する。
【課題を解決するための手段】
【0009】
本発明に係る回転電機システム制御装置は、回転電機と、前記回転電機の駆動装置と、前記回転電機及び前記駆動装置を冷却する冷却液の循環路と、前記冷却液を前記循環路に循環させるウォータポンプと、を含む回転電機システムを制御する回転電機システム制御装置であって、前記冷却液の循環路に設けられた温度センサから取得した前記冷却液の液温と、前記ウォータポンプの回転数とに応じて、前記駆動装置及び前記ウォータポンプを制御する制御部を備え、前記制御部は、前記冷却液の液温が予め設定された閾値以上であるときに、前記ウォータポンプの回転数が前記ウォータポンプの定常運転時の回転数として予め設定された定常範囲内の値であるか、前記定常範囲の外にあるかを分類し、前記定常範囲内の場合に、前記回転電機の出力トルクが前記冷却液の液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする。
【0010】
本発明の他の1つの態様の回転電機システム制御装置において、前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、前記制御部は、さらに、前記ウォータポンプの回転数が、前記定常範囲の外である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0011】
また、本発明の他の1つの態様の回転電機システム制御装置において、前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、前記制御部は、さらに、前記ウォータポンプの回転数が、前記定常範囲の外であって、前記定常範囲よりも大きい値として予め定めた上限値と下限値との間の上下限範囲内である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0012】
このように、前記駆動装置に含まれる複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて前記回転電機の出力トルクを制限する態様では、前記複数の回路素子のうち最も負荷の高いと考えられる回路素子に合わせた制御が行われるので、前記駆動装置を適切に保護することができる。
【0013】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が、前記上限値以上の値として予め定めた第2の閾値より大きい場合に、前記ウォータポンプを停止させる制御を行うことが好ましい。
【0014】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が、0よりも大きく、かつ前記下限値よりも小さい値として予め設定された第3の閾値以下である場合に、前記ウォータポンプの回転数を現在の回転数より大きくする制御を行うことが好ましい。
【0015】
本発明の他の1つの態様の回転電機システム制御装置において、前記制御部は、さらに、前記ウォータポンプの回転数が0である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することが好ましい。
【0016】
また、本発明に係る回転電機システム制御装置において、前記制御部は、以上で示した本発明の複数の態様において行う制御を組み合わせて行ってもよい。
【発明の効果】
【0017】
本発明によると、冷却システムにおいて発生した異常の種類に応じて、回転電機システムにおける適切なフェールセーフ処理を行うことができる回転電機システム制御装置を提供できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態における回転電機システム制御装置を備える回転電機システムのブロック図である。
【図2】図1のインバータ18の構成の詳細の例を示す図である。
【図3】本発明の実施形態において行われる異常判断処理の手順の例を示すフローチャートである。
【図4】本発明の実施形態において行われる異常モード判断処理及びフェールセーフ処理の内容の例を示す表である。
【図5】冷却液の温度に対する回転電機の許容トルク電流の例を示す図である。
【図6】回路素子に流れる電流に対する素子温度上昇度の例を示す図である。
【発明を実施するための形態】
【0019】
図1は、回転電機システム制御装置を備える回転電機システムの概略の例を示すブロック図である。図1に示す回転電機システムは、回転電機16と、インバータ18と、回転電機16及びインバータ18を冷却する冷却システムと、を備える。図1に示す回転電機システムが備える冷却システムは、冷却液の循環路10、ウォータポンプ12、及びラジエータ14を含む。
【0020】
ECU(Electronic Control Unit)20は、車両に搭載され、後述するように各センサの情報を基に回転電機システム及び冷却システムなどの動作を制御する制御部で、回転電機システム制御装置である。ECU20はマイクロコンピュータなどを用いて実現できる。ECU20の機能の一部が、本発明の1つの実施形態の回転電機システム制御装置又は冷却システム制御装置として機能する。
【0021】
回転電機16は、例えば、ハイブリッド自動車(HV, Hybrid Vehicle)又は電気自動車(EV, Electric Vehicle)の駆動用モータである。また、回転電機16は、ハイブリッド自動車のエンジンに連結され、エンジンの回転力によって発電する発電機又はエンジンの始動を行うことのできる電動機として機能するモータであってもよい。なお、図1では省略して図示しているが、回転電機システムは複数の回転電機16を備えることがある。例えば、ハイブリッド自動車に搭載される回転電機システムは、車両の駆動用モータと、エンジンの動力を受けて発電又はエンジンの始動を行うモータと、を備える。
【0022】
インバータ18は、回転電機16の駆動装置の一部を構成する。インバータ18は、ECU20からの制御信号PWMに従って、図示しない直流電源から供給された直流電圧を交流電圧に変換して回転電機16を駆動する。インバータ18は、複数のモジュール部品を組み合わせて1つの集合部品(ASSY)として構成されることがある。例えば、インバータ18は、回転電機16を駆動する機能を有するインバータモジュールと、図示しない直流電源の電圧レベルの変換を行うコンバータモジュールと、を含むものであってよい。また例えば、回転電機システムが複数の回転電機16を備える場合、インバータ18は、各回転電機16を駆動するインバータモジュールを含んで構成される。
【0023】
図2に、回転電機システムが3つの回転電機16a,16b,16cを備える場合のインバータ18の例を示す。図2において、例えば、回転電機16aは車両の前輪を駆動する駆動用モータ、回転電機16bは車両の後輪を駆動する駆動用モータ、及び回転電機16cは図示しないエンジンと動力のやり取りをすることで発電又はエンジンの始動を行うモータである。図2を参照すると、インバータ18は、回転電機16a,16b,16cをそれぞれ駆動するインバータモジュールINV1,INV2,INV3を含む。インバータモジュールINV1,INV2,INV3は、それぞれ、ECU20からの制御信号PWM1,PWM2,PWM3に従って各回転電機16a,16b,16cを駆動する。
【0024】
また、図2において、インバータ18は、コンバータモジュールCNV1,CNV2を含む。コンバータモジュールCNV1,CNV2は、例えば、図示しない直流電源からの供給電圧の電圧レベルを変換し、インバータモジュールINV1,INV2,INV3や図示しない補機バッテリなどの負荷に供給したり、回転電機16で発電された電力を直流電源に回生する降圧回路として機能したりする。コンバータモジュールCNV1,CNV2は、それぞれ、ECU20からの制御信号SC1,SC2に従って作動する。回転電機システムが備える回転電機16の個数など、回転電機システムの特性に応じてインバータ18に含まれるモジュールの数は増減される。
【0025】
再び図1を参照し、ウォータポンプ12は、循環路10に冷却液を循環させるポンプである。ウォータポンプ12は、ECU20からの回転数指令値DRに従って回転する。ラジエータ14は、循環路10を通る冷却液の熱を放出させて冷却液を冷却する熱交換装置である。図1を参照すると、冷却システムの循環路10内の冷却液は、実線矢印の方向に従って、ウォータポンプ12、回転電機16、ラジエータ14、及びインバータ18の順に流れる。
【0026】
以下、図1及び図2を参照して説明した回転電機システムの制御において、ECU20が行う処理について説明する。
【0027】
ECU20は、回転電機16a,16b,16cそれぞれの出力トルクを指定するトルク指令値TR1,TR2,TR3を外部ECUなどから取得する。またECU20は、各回転電機16a,16b,16cに設けられた図示しない電流センサから、各回転電機16a,16b,16cを流れる電流MCRT1,MCRT2,MCRT3を取得し、各コンバータモジュールCNV1,CNV2に設けられた図示しない電流センサから、各コンバータモジュールCNV1,CNV2に流れる電流ICNV1,ICNV2を取得する。
【0028】
また、図2を参照すると、インバータ18の各モジュールINV1,INV2,INV3,CNV1,CNV2には、各モジュール内の回路素子の温度を検出する素子温度センサ24a,24b,24c,24d,24eが設けられる。ECU20は、素子温度センサ24a,24b,24c,24d,24eがそれぞれ検出した各モジュール内の回路素子の温度TINV1,TINV2,TINV3,TCNV1,TCNV2を取得する。
【0029】
さらに、冷却液の循環路10において、インバータ18への冷却液の入口付近に、インバータ18を通る冷却液の温度を検出する液温センサ22が設けられる(図2)。液温センサ22は、インバータ18の各モジュールが発生する熱による影響を受けにくい部分に設けられる。液温センサ22は、循環路10において、インバータ18付近でなく、例えばラジエータ14からの冷却液の出口付近に設けてもよい。ECU20は、液温センサ22が検出した冷却液温TWを取得する。
【0030】
ECU20は、回転電機システムに設けられた各種センサなどから取得した上述の信号に基づいて、インバータ18の各モジュールを制御する制御信号PWM1、PWM2,PWM3,SC1,SC2を生成し、生成した信号をインバータ18に送信する。インバータ18の各モジュールは、ECU20から受信した制御信号に従って作動する。
【0031】
また、ECU20は、ウォータポンプ12に対して、回転数指令値DRを送信する。回転数指令値DRは、通常、予め設定された一定の値である。ECU20は、冷却液の温度を検出する液温センサ22が検出した冷却液温TWに応じた回転数指令値DRを送信するようにしてもよい。例えば、冷却液の温度範囲を低温、中温、及び高温の3つの範囲に分けて、各温度範囲に対応する回転数指令値DRを予め設定しておき、検出された冷却液温TWの入る温度範囲に対応して設定された回転数指令値DRをウォータポンプ12に送信するようにしてもよい。
【0032】
また、ECU20は、ウォータポンプ12からウォータポンプ12の実回転数Rを取得し、取得した実回転数Rに基づいて冷却システムについての異常判断処理を行う。以下、図3を参照し、ECU20が行う異常判断処理について説明する。
【0033】
図3は、ECU20が行う異常判断処理の手順の例を示すフローチャートである。
【0034】
車両の作動が開始されると、ECU20は、図3に示す処理を開始する。図3を参照すると、まずステップS1で、ECU20は、液温センサ22が検出した冷却液温TWを取得する。次に、ステップS2で、ECU20は、取得した冷却液温TWが、予め設定された閾値θWを超えているか否かを判定する。冷却液温TWが閾値θWを超えていれば、処理はステップS3へ進み、超えていなければ、処理はステップS1に戻る。
【0035】
ステップS2で用いられる閾値θWは、冷却システム内の冷却液の温度が正常であるか否かを判定するための閾値である。閾値θWは、例えば回転電機システムを搭載する車両が使用される環境での外気温に基づいて決定される。例えば、外気温の最高温度が約40℃であると考えられる地域で使用される車両に回転電機システムが搭載される場合、閾値θWを65℃に設定し、外気温の最高温度が約50℃であると考えられる地域で使用される車両に回転電機システムが搭載される場合は75℃に設定してもよい。外気温に基づいて決定された冷却液温の閾値に、液温センサ22の検出誤差(例えば、10℃)を加算した値を閾値θWとして用いてもよい。
【0036】
ステップS3で、ECU20は、ウォータポンプ12の実回転数Rを取得する。次に、ステップS4で、ECU20は、ステップS3で取得した実回転数Rに基づいて、冷却システムにおいて発生した異常の異常モードを判断する。
【0037】
図4の表に、ステップS4で判断される異常モードの内容の例を示す。図4の表において、第1列は、ウォータポンプ12の実回転数Rについての条件を示す。図4の表の第2列は、ウォータポンプ12の実回転数Rについて、各行(1〜6)の条件が成立した場合の異常モードを示す。図4の表の第3列の内容については後に詳述する。
【0038】
以下、図4を参照し、ステップS4における異常モード判断処理について説明する。
【0039】
ウォータポンプ12の実回転数Rが、定常運転時の回転数として予め設定された定常範囲θNL≦R≦θNUの値である場合(行1)は、ステップS4で、ECU20は、冷却システムのラジエータ14に異常が発生していると判断する。ここで、定常運転時の回転数の定常範囲θNL≦R≦θNUは、回転数指令値DRに対して期待される実回転数の範囲である。例えば、定常範囲の下限値θNL=(1+0.1)DR、定常範囲の上限値θNU=(1−0.1)DRに設定される。ステップS4で実回転数Rが定常範囲内である場合、冷却システムにおいて、循環路10を冷却液が循環しているにも関わらず冷却液温が上昇している状態であると考えられるので、ラジエータ14において熱交換の異常が発生していると判断できる。例えば、ラジエータ14のファンが故障している場合がある。
【0040】
ウォータポンプ12の実回転数Rが、定常範囲より大きい値の範囲θH1<R<θH2の値である場合(行2)、ステップS4で、ECU20は、冷却システムの循環路10が閉塞していると判断する。この値の範囲は、例えば、下限値θH1=(1.2+0.1)DR、上限値θH2=(1.2−0.1)DRに設定される。また例えば、冷却システムの循環路10において人工的に作られた閉塞状態の下で回転数指令値DRに対する実回転数を測定し、この測定値を用いて下限値θH1及び上限値θH2を決定してもよい。
【0041】
ウォータポンプ12の実回転数Rが、行2の値の範囲の上限値θH2以上である閾値θH3よりも大きい場合(行3)、ステップS4で、ECU20は、冷却システムの正常動作のために十分な量の冷却液が循環路10内に存在しないと判断する。この閾値θH3は、例えば、回転数指令値DRの約1.5倍に設定される。閾値θH3は、例えば、循環路10に冷却液を充填しない状態の下で回転数指令値DRに対する実回転数Rを測定し、この測定値を用いて決定してもよい。ステップS4で実回転数Rが閾値θH3より大きい場合、例えば循環路10からの冷却液漏れなどによって循環路10内の冷却液が減少し、ウォータポンプ12が空転している状態であると考えられる。
【0042】
ウォータポンプ12の実回転数Rが、0より大きく、かつ定常範囲の下限値θNLより小さい閾値θL以下である場合(行4)、ECU20は、ステップS4で、ウォータポンプ12に関して異常が発生していると判断する。閾値θLは、例えば、回転数指令値DRの0.8倍の値に設定される。また、冷却システムにおいて、循環路10の閉塞が生じる際、循環路10が閉塞した初期の段階ではウォータポンプ12の回転数指令値DRに対する実回転数Rが一時的に低下し、その後、再び実回転数Rが上昇することが知られている。閾値θLは、この循環路10が閉塞した初期段階に得られる実回転数Rよりもさらに小さい値として設定することが望ましい。閾値θLを循環路10の閉塞の初期段階における実回転数よりも小さい値に設定しておけば、ステップS4の異常モードの判断において、ウォータポンプ12の異常発生を循環路10の閉塞と区別してより精度良く判断できる。ステップS4で、実回転数Rが0<R≦θLの範囲である場合、例えば、ウォータポンプ12のモータの軸が磨耗していて、回転数指令値DRに対して期待される実回転数が得られない状態が考えられる。また例えば、ECU20とウォータポンプ12とを接続する信号線における異常により、ECU20が送信した回転数指令値DRの信号レベルより低いレベルの信号を回転数指令値DRとしてウォータポンプ12が受信している場合など、ソフトウェア上の異常が発生している場合もある。
【0043】
ウォータポンプ12の実回転数Rが0である場合(行5)、ECU20は、ステップS4で、ウォータポンプ12が故障していると判断する。
【0044】
ウォータポンプ12の実回転数Rが行1から行5のいずれの条件も満たさない場合(行6)、ステップS4において、ECU20は異常モードの判断を保留する。例えば、実回転数Rが、図4の表の行4で用いられる閾値θLより大きく、かつ定常範囲の下限値θNLより小さい場合は、実回転数Rは、第1行から第5行のいずれの条件も満たさない。また例えば、図4の表の行2の閾値θH1を定常範囲の上限値θNUよりも大きく設定した場合であって実回転数Rが定常範囲の上限値θNUと閾値θH1との間の値である場合、及び行3の閾値θH3を行2の閾値θH2よりも大きく設定した場合であって実回転数Rが閾値θH2と閾値θH3との間の値である場合においても、実回転数Rは、行1から行5のいずれの条件も満たさない。
【0045】
ステップS4の異常モード判断処理の後、ステップS5において、異常モードが特定されたか否かを判定する。ECU20がステップS4で異常モードを特定していた場合(図4の表の行1から行5)、ステップS5において、処理はステップS6へ進む。ECU20がステップS4で異常モードの判断を保留していた場合(図4の表の行6)、ステップS5において、処理はステップS1に戻る。
【0046】
ステップS6では、ECU20は、回転電機システムについて、ウォータポンプ12の実回転数Rの条件に応じたフェールセーフ処理を行う。図4の表の第3列に、ウォータポンプ12の実回転数Rについて成立した条件に応じてステップS6で行われる処理の内容を示す。ステップS6で行われる処理は、ステップS4で判断された異常モードに適したフェールセーフ処理である。
【0047】
ウォータポンプ12の実回転数Rが定常範囲(θNL≦R≦θNU)の場合(行1)、ステップS6で、ECU20は、液温センサ22から取得した冷却液温TWに基づいて、回転電機16a,16b,16cの出力トルクを制限する処理を行う。ECU20は、例えば図5に示すような、冷却液の温度に対して回転電機16a,16b,16cの許容される最大のトルク電流を決定するマップを記憶装置(図示しない)に保持している。図5を参照すると、冷却液温が制限開始温度Tlim以下である場合、許容トルク電流は100%であり、冷却液温が制限開始温度Tlimを超えると、許容トルク電流は、最高温度Tmaxで0%になるように線形に低下する。
【0048】
ECU20は、図5のマップから冷却液温TWに対応する許容トルク電流を取得し、取得した許容トルク電流に応じて各回転電機16a,16b,16cに対するトルク指令値TR1,TR2,TR3に制限をかけた上で、各回転電機16a,16b,16cを制御する各制御信号PWM1,PWM2,PWM3を生成する。ECU20は、外部ECUなどから受信したトルク指令値TR1,TR2,TR3のうち、冷却液温TWに対応する許容トルク電流よりも大きいトルク指令値がある場合、そのトルク指令値として許容トルク電流の値を設定する。その後、各回転電機16a,16b,16cにおいて各トルク指令値TR1,TR2,TR3の示す出力が得られるように、各制御信号PWM1,PWM2,PWM3を生成してインバータ18の各モジュールINV1,INV2,INV3に送信する。冷却液温TWに対応する許容トルク電流が100%の場合は、ECU20は、トルク指令値の制限を行わずに、各回転電機16a,16b,16cにおいて、受信した各トルク指令値TR1,TR2,TR3の示す出力が得られるように各制御信号PWM1,PWM2,PWM3を生成する。
【0049】
図5のマップにおいて、制限開始温度Tlim及び最高温度Tmaxは、インバータ18に含まれる回路素子の素子温度が許容される最大値を超えないように設定される。インバータ18に含まれる回路素子については、例えば図6に示すように、その回路素子に流れる電流の値に対する素子温度上昇度ΔTが知られており、ECU20は、図6に例示するような素子温度上昇度のマップを記憶装置に保持している。通常、回路素子の温度は循環路10内の冷却液温TWとほぼ等しいと考えられるため、ある電流が流れたときの素子温度上昇度ΔTと冷却液温TWとの和が、その電流が流れたときの回路素子の素子温度であると言える。したがって、回路素子に100%の電流が流れたときの素子温度上昇度をΔTmaxとし、ΔTmaxと冷却液温Twとの和がその回路素子の温度の許容最大値と等しくなるような冷却液温TWを、制限開始温度Tlimとして設定すればよい。そうすると、冷却液温Twが制限開始温度Tlim以下である間は、回路素子に100%の電流を流してもその回路素子の温度は許容最大値を超えない。さらに、許容トルク電流を0%とする最高温度Tmax=Tlim+ΔTmaxと設定すると、冷却液温TWが回路素子の温度の許容最大値に達した場合は、その回路素子に流れる電流は0、すなわち素子温度上昇度ΔT=0となり、回路素子の温度はその許容最大値を超えない。
【0050】
再び図4を参照し、ウォータポンプ12の実回転数RがθH1<R<θH2である場合(行2)、ステップS6で、ECU20は、インバータ18の各モジュールに設けられた素子温度センサ24a〜24eを用いて、循環路10において各モジュールに最も近い部分を通る冷却液の推定液温を算出し、算出した推定液温に基づいて回転電機16a,16b,16cの出力トルクを制限する処理を行う。
【0051】
まず、インバータ18の各モジュールに設けられた温度センサ24a〜24eの検出温度と、インバータ18の各モジュールによる電流値MCRT1,MCRT2,MCRT3,ICNV1,ICNV2と、に基づいて、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の推定液温が算出される。ECU20は、電流センサから取得した電流値MCRT1,MCRT2,MCRT3,ICNV1,ICNV2を、インバータ18の各モジュールINV1,INV2,INV3,CNV1、CNV2の回路素子に流れる電流値として、例えば図6のようなマップから、各電流値に対応する各回路素子の素子温度上昇度ΔTを求める。次に、素子温度センサ24a〜24eの検出温度TINV1,TINV2,TINV3,TCNV1,TCNV2から、各素子について求めた素子温度上昇度ΔTを減算した値を、循環路10において各モジュールに最も近い部分を通る冷却液の推定液温とする。その後、求めた推定液温のうち最も高い推定液温に対応する許容トルク電流を図5のマップから求める。ECU20は、最高推定液温に対応する許容トルク電流に応じて、図4の表の行1の場合に関して説明した出力トルク制限処理と同様の処理を行い、回転電機16a,16b,16cの出力トルクを制限する。
【0052】
図4の表の行2の場合(θH1<R<θH2)、循環路10が閉塞していると考えられるため、循環路10の冷却液の流れが止まった状態であると考えられる。この状態では、例えばインバータ18の一部のモジュールが動作していて他のモジュールが動作していない場合、循環路10において、動作しているモジュールに最も近い部分を通る冷却液の温度が、動作していないモジュールに最も近い部分を通る冷却液の温度と比較して高くなると考えられる。したがって、上記で説明した処理のように、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の推定液温を用いて回転電機16a,16b,16cの出力トルク制限処理を行うと、適切にインバータ18及び回転電機16a,16b,16cを保護することができる。
【0053】
なお、循環路10内で冷却液が正常に流れている場合は、循環路10内の冷却液の流れが止まっている場合と比較して、循環路10においてインバータ18の各モジュールに最も近い部分を通る冷却液の温度の間に生じる差は小さい。したがって、ウォータポンプ12の実回転数Rが定常範囲内である場合(行1)は、上述のように液温センサ22が検出した冷却液温TWに基づいて回転電機16a,16b,16cの出力トルク制限処理が行われる。
【0054】
ウォータポンプ12の実回転数Rが閾値θH3よりも大きい場合(行3)、ステップS6で、ECU20は、ウォータポンプ12を停止させる制御を行う。例えば、回転数指令値DR=0とする制御信号をウォータポンプ12に送信する。ウォータポンプ12を停止させることで、ウォータポンプ12の過熱が防止される。
【0055】
ウォータポンプ12の実回転数Rが0より大きく、かつ閾値θL以下である場合(行4)、ステップS6で、ECU20は、ウォータポンプ12の回転数を現在の回転数より大きくする制御を行う。例えば、ECU20は、現在よりも大きい値の回転数指令値DRをウォータポンプ12に対して送信する。ウォータポンプ12の回転数を上げることで冷却システムの循環路10の冷却液流量を定常値に近づけることができる。
【0056】
ウォータポンプ12の実回転数Rが0である場合(行5)、図4の表の行2の場合のフェールセーフ処理と同様に、ステップS6で、ECU20は、インバータ18の各モジュールに設けられた素子温度センサ24a〜24eを用いて算出した推定冷却液温に基づいて、回転電機16a,16b,16cの出力トルクを制限する処理を行う。ウォータポンプ12の実回転数Rが0である場合の冷却システムの状態は、循環路10内を冷却液が流れていないという点では行2の場合の冷却システムの状態と同様であるため、行2の場合と同様のフェールセーフ処理を行う。
【0057】
各場合のフェールセーフ処理(図3のステップS6)において、ECU20は、特定した異常モードを図示しない表示装置に表示させる処理を行ってもよい。また、ステップS4で異常モードの判断を保留した場合、ステップS5における判定の後ステップS1の処理を実行する前に、ECU20は、冷却システムにおける異常発生を図示しない表示装置に表示させる処理を行ってもよい。
【0058】
以上で説明した実施形態では、ステップS6のフェールセーフ処理において、ウォータポンプ12の実回転数Rが定常範囲内の場合は液温センサ22が検出した冷却液温TWに基づいて回転電機の出力トルク制限処理を行い、実回転数RがθH1<R<θH2の場合及びR=0の場合は素子温度センサ24a〜24eの検出温度を用いて算出した推定冷却液温に基づいて回転電機の出力トルク制限処理を行う。他の実施形態では、実回転数Rが定常範囲内である場合も、θH1<R<θH2の場合及びR=0の場合と同様に、素子温度センサ24a〜24eの検出温度を用いて算出した推定液温に基づいて回転電機の出力トルク制限処理を行ってもよい。
【0059】
また、以上で説明した実施形態では、素子温度センサ24a〜24eの検出温度を用いて算出した推定液温に基づいた回転電機の出力トルク制限処理において、算出された推定液温のうち最大の推定液温を用いて、回転電機システムが備えるすべての回転電機16a,16b,16cの許容トルク電流を一律に決定する。他の実施形態では、各回転電機16a,16b,16cを制御する各インバータモジュールINV1,INV2,INV3に設けられた各素子温度センサ24a,24b,24cに基づいて、回転電機16a,16b,16cのそれぞれについて許容トルク電流を決定し、決定した許容トルク電流に従ってそれぞれの回転電機16a,16b,16cの出力トルクを制限してもよい。
【符号の説明】
【0060】
10 循環路、12 ウォータポンプ、14 ラジエータ、16a,16b,16c 回転電機、18 インバータ、20 ECU、22 液温センサ、24a,24b,24c,24d,24e 素子温度センサ。
【特許請求の範囲】
【請求項1】
回転電機と、前記回転電機の駆動装置と、前記回転電機及び前記駆動装置を冷却する冷却液の循環路と、前記冷却液を前記循環路に循環させるウォータポンプとを含む回転電機システムを制御する回転電機システム制御装置であって、
前記冷却液の循環路に設けられた温度センサから取得した前記冷却液の液温と、前記ウォータポンプの回転数とに応じて、前記駆動装置及び前記ウォータポンプを制御する制御部を備え、
前記制御部は、
前記冷却液の液温が予め設定された閾値以上であるときに、前記ウォータポンプの回転数が前記ウォータポンプの定常運転時の回転数として予め設定された定常範囲内の値であるか、前記定常範囲の外にあるかを分類し、前記定常範囲内の場合に、前記回転電機の出力トルクが前記冷却液の液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項2】
請求項1に記載の回転電機システム制御装置において、
前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記定常範囲の外である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項3】
請求項1に記載の回転電機システム制御装置において、
前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記定常範囲の外であって、前記定常範囲よりも大きい値として予め定めた上限値と下限値との間の上下限範囲内である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項4】
請求項2または3に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記上限値以上の値として予め定めた第2の閾値より大きい場合に、前記ウォータポンプを停止させる制御を行うことを特徴とする回転電機システム制御装置。
【請求項5】
請求項4に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が、0よりも大きく、かつ前記下限値よりも小さい値として予め設定された第3の閾値以下である場合に、前記ウォータポンプの回転数を現在の回転数より大きくする制御を行うことを特徴とする回転電機システム制御装置。
【請求項6】
請求項5に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が0である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項1】
回転電機と、前記回転電機の駆動装置と、前記回転電機及び前記駆動装置を冷却する冷却液の循環路と、前記冷却液を前記循環路に循環させるウォータポンプとを含む回転電機システムを制御する回転電機システム制御装置であって、
前記冷却液の循環路に設けられた温度センサから取得した前記冷却液の液温と、前記ウォータポンプの回転数とに応じて、前記駆動装置及び前記ウォータポンプを制御する制御部を備え、
前記制御部は、
前記冷却液の液温が予め設定された閾値以上であるときに、前記ウォータポンプの回転数が前記ウォータポンプの定常運転時の回転数として予め設定された定常範囲内の値であるか、前記定常範囲の外にあるかを分類し、前記定常範囲内の場合に、前記回転電機の出力トルクが前記冷却液の液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項2】
請求項1に記載の回転電機システム制御装置において、
前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記定常範囲の外である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項3】
請求項1に記載の回転電機システム制御装置において、
前記駆動装置には、前記駆動装置に含まれる複数の回路素子それぞれの温度を検出する温度センサが設けられ、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記定常範囲の外であって、前記定常範囲よりも大きい値として予め定めた上限値と下限値との間の上下限範囲内である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【請求項4】
請求項2または3に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が、前記上限値以上の値として予め定めた第2の閾値より大きい場合に、前記ウォータポンプを停止させる制御を行うことを特徴とする回転電機システム制御装置。
【請求項5】
請求項4に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が、0よりも大きく、かつ前記下限値よりも小さい値として予め設定された第3の閾値以下である場合に、前記ウォータポンプの回転数を現在の回転数より大きくする制御を行うことを特徴とする回転電機システム制御装置。
【請求項6】
請求項5に記載の回転電機システム制御装置において、
前記制御部は、さらに、
前記ウォータポンプの回転数が0である場合に、前記複数の回路素子それぞれについて、前記駆動装置に設けられた温度センサから取得した温度を用いて、前記循環路において各回路素子に最も近い部分を通る冷却液の推定液温を求め、前記回転電機の出力トルクが、前記複数の回路素子それぞれについて求められた前記推定液温のうち最大の推定液温に基づいて決定される出力トルク制限値以下になるように前記駆動装置を制御することを特徴とする回転電機システム制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−31365(P2013−31365A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2012−190779(P2012−190779)
【出願日】平成24年8月31日(2012.8.31)
【分割の表示】特願2007−101001(P2007−101001)の分割
【原出願日】平成19年4月6日(2007.4.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成24年8月31日(2012.8.31)
【分割の表示】特願2007−101001(P2007−101001)の分割
【原出願日】平成19年4月6日(2007.4.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]